Лекция 20.Тахогенераторы постоянного тока. Тахогенераторы постоянного тока
Лекция 20.Тахогенераторы постоянного тока — КиберПедия
Тахогенераторы постоянного тока(рис.5.7,а) по принципу действия и конструкции представляют собой электрические коллекторные микромашины постоянного тока с независимым электромагнитным возбуждением или возбуждением от постоянных магнитов.
Выходная характеристика. Выходная характеристика тахогенератора - это зависимость напряжения U, от угловой скорости wякоря при Ф=const и RH=const.
Электродвижущая сила якоря Ея прямо пропорциональна магнитному потоку возбуждения и угловой скорости якоря. На основании (2.2) при постоянном магнитном потоке
где Sтг.о=кФв крутизна тахогенератора при х.х.; Q - угол поворота якоря тахогенератора.
Выражение (5.14) - это уравнение выходной характеристики тахогенератора постоянного тока при х.х., т.е. при разомкнутой цепи якоря. Данная линейная зависимость показана на рис.5.7,б (для RH= ¥).
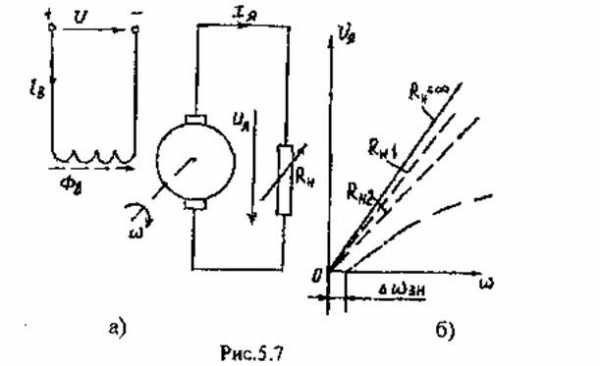
При подключении обмотки якоря к прибору или устройству с конечным значением входного сопротивления выходное напряжение будет меньше ЭДС якоря. Уравнение равновесия ЭДС и напряжений в цепи якоря, записанное по второму закону Кирхгофа, имеет вид Uя=Eя-IяRця, где Iя - ток якоря; Rця - сопротивление цепи якоря, равное сумме сопротивлений обмотки Rя и щеток. Так как по закону Ома Iя=Uя /Rя, то
Уравнение (5.15) свидетельсвует о линейности выходной характеристики тахогенератора постоянного тока при постоянных магнитном потоке возбуждения и сопротивлении щеток.
На рис.5.7,б представлены выходные характеристики, соответствующие уравнению (5.15) для двух конечных значений сопротивления нагрузки Rн1 и Rн2, причем Rн1> Rн2.Однако выходная характеристика реального тахогенератора может отклоняться от линейной зависимости (5.15). Это объясняется двумя факторами:
1) возникновением при нагрузке тахогенератора потока якоря, нелинейно ослабляющего поток возбуждения при росте тока якоря. Следовательно, ЭДС якоря при нагрузке не является постоянной величиной для данной угловой скорости якоря, а зависит от нагрузки;
2) изготовлением тахогенераторов постоянного тока с графитовыми щетками. У тахогенераторов с графитовыми щетками постоянным является не сопротивление переходного контакта, а падение напряжения ищ. Это соответствует характеру зависимости сопротивления графита от плотности тока в нем. В таком тахогенераторе напряжение на выводах якоря при нагрузке Uя=Eя-IяRця.
Выходная характеристика, построенная с учетом размагничивающего действия реакции якоря и постоянства падения напряжения в щеточном контакте, показана на рис.5.7,б штрих- пунктирной линией. Как видно, характеристика нелинейная, т.е. появляется погрешность отображения функциональной зависимости. Характеристика начинается не из нуля, так как при малой угловой скорости якоря ЭДС меньше падения напряжения в щетках и Uя =0. Это означает, что тахогенератор имеет зону нечувствительности Dwзн - диапазон угловых скоростей ротора, в пределах которого выходное напряжение практически равно нулю.
У тахогенераторов постоянного тока при Rн>> Rя крутизна Sтг=3-100 мВ/(об/мин).
Погрешности и классы точности. Погрешность отображения функциональной зависимости, вызванная реакцией якоря, является принципиальной.
Для уменьшения погрешности целесообразно подключать на выход тахогенератора как можно большее нагрузочное сопротивление Rн и использовать небольшой диапазон угловых скоростей якоря(w£0.5<wном). Зона нечувствительности является конструктивной погрешностью тахогенераторов постоянного тока. Зона нечувствительности сужается при увеличении крутизны тахогенератора:
Значительное уменьшение Dwзн достигается применением металлических щеток, у которых вольт-амперная характеристика линейная.
Преимущество тахогенераторов постоянного тока перед асинхронными -возможность получения меньшей погрешности отображения и более высокой крутизны. Однако имеется ряд недостатков, ограничивающих их применение: наличие скользящего контакта коллектор-щетки, значительно снижающего надежность машин; необходимость использования фильтров от радиопомех и для сглаживания пульсации выходного напряжения.
При оценке класса точности тахогенераторов постоянного тока используют два показателя: погрешность отображения функциональной зависимости и асимметрию. Асимметрия - отклонение выходных напряжений тахогенератора от среднего значения в режиме нагрузки при равных угловых скоростях и разных направлениях вращения ротора. Объясняется асимметрия погрешностью установки щеток.
Класс точности тахогенератора устанавливают по наихудшему из показателей. В зависимости от класса допустимая погрешность и асимметрия лежат в диапазоне 0,02-2,5%.
Динамические характеристики. В режиме, близком к холостому ходу, тахогенератор можно считать усилительным звеном, если входной величиной является угловая скорость, и идеальным дифференцирующим звеном, если входной величиной является угол поворота ротора. Передаточные функции тахогенератора для этих двух случаев будут иметь вид
где коэффициент передачи тахогенератора Kтг=Sтг.о. В реальных условиях тахогенератор может работать с нагрузкой, что скажется на его динамических характеристиках.
cyberpedia.su
Тахогенераторы постоянного тока — КиберПедия
Тахогенераторы постоянного тока по принципу действия и конструкции представляют собой электрические коллекторные микромашины постоянного тока с независимым электромагнитным возбуждением или возбуждением от постоянных магнитов.
Тахогенераторы не могут измерять очень медленное вращение — получающийся сигнал чересчур мал. Тахогенератор создаёт дополнительную нагрузку на вращающийся вал и содержит трущиеся детали, требующие регулярного ухода.
Асинхронный тахогенератор
 Асинхронный тахогенератор ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором - одна обмотка статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), а с другой - генераторной обмотки (ГО) снимается выходное напряжение. При питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС - ЕТ (показана внутри ротора) и ЭДС вращения - ЕВР (показана снаружи ротора). В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
Асинхронный тахогенератор ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором - одна обмотка статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), а с другой - генераторной обмотки (ГО) снимается выходное напряжение. При питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС - ЕТ (показана внутри ротора) и ЭДС вращения - ЕВР (показана снаружи ротора). В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
Датчики тока
Датчики тока предназначены для измерения и контроля постоянным, переменным и импульсным токами и широко применяются в электротехнике для создания систем обратной связи.
В зависимости от принципа работы датчики тока подразделяются на резистивные, токовые трансформаторы и датчики на эффекте Холла.
Измерительные трансформаторы тока предназначены для преобразования тока до значения, удобного для измерения.
Первичная обмотка трансформатора тока включается последовательно в цепь с измеряемым переменным током, а во вторичную включаются измерительные приборы. Ток, протекающий по вторичной обмотке трансформатора тока, пропорционален току, протекающему в его первичной обмотке. Трансформаторы тока обеспечивают безопасность измерений, изолируя измерительные цепи от первичной цепи с высоким напряжением.Основным недостатком является инертность, которая затрудняет измерение мгновенных значений несинусоидального тока. Трансформатор тока имеет замкнутый магнитопровод 2 и две обмотки — первичную 1 и вторичную 3. Первичная обмотка включается последовательно в цепь измеряемого тока I1, к вторичной обмотке присоединяются измерительные приборы, обтекаемые током I2.
Трансформаторы тока
а – одновитковый трансформатор тока; б – многовитковый трансформатор тока; в - многовитковый трансформатор тока с двумя сердечниками; 1 - первичная обмотка; 2 - вторичная обмотка; 3 - сердечник; 4 - изоляция; 5 - обмотка прибора
Основным недостатком является инертность, которая затрудняет измерение мгновенных значений несинусоидального тока.
cyberpedia.su
Тахогенераторы постоянного тока
Тахогенераторами называют электрические машины малой мощности, работающие в генераторном режиме и служащие для преобразования частоты его вращения в электрический сигнал.
Тахогенераторы постоянного тока по принципу действия и конструктивному оформлению являются электрическими коллекторными машинами. Выходной характеристикой тахогенератора является зависимость величины напряжения на зажимах якоря Uя от частоты его вращения n при постоянном магнитном потоке возбуждения Ф и постоянном сопротивлении нагрузки Rнагр На рис. 13.10. показана выходная характеристика тахогенератора при различных Rнагр.
Рис. 13.10.
Экспериментальная часть
Задание 1
Пуск в ход двигателя постоянного тока с независимым / параллельным / последовательным возбуждением с регистрацией и отображением режимных параметров на компьютере
Описание электрических схем соединений
Источник G1 - источник синусоидального напряжения промышленной частоты.
Источник питания G2 двигателя постоянного тока используется для питания регулируемым напряжением якорной обмотки и нерегулируемым напряжением обмотки возбуждения машины постоянного тока М2, работающей в режиме двигателя с независимым возбуждением и для питания регулируемым напряжением якорной обмотки и обмотки возбуждения машины постоянного тока М2, работающей в режиме двигателя с параллельным / последовательным возбуждением.
Возбудитель G3 служит для питания обмотки возбуждения машины переменного тока G6, работающей в режиме синхронного генератора.
Преобразователь угловых перемещений G5 генерирует импульсы, поступающие на вход указателя частоты вращения Р3 электромашинного агрегата.
Синхронный генератор G6 питает активную нагрузку А10, выступая в качестве нагрузочной машины.
Реостат А13 ограничивает пусковой ток двигателя М2.
Выключатель А6 предназначен для шунтирования реостата А13 после разгона двигателя М2.
Датчики тока и напряжения в блоке А12 обеспечивают гальваническую развязку силовой и измерительной цепей и преобразуют ток и напряжение якорной обмотки испытуемого двигателя М2 в пропорциональные им нормированные напряжения.
Через аналоговые входы АСН0-АСН8, АСН1-АСН9, АСН2-АСН10, АСН3-АСН11 коннектора А4 напряжения, пропорциональные току и напряжению якорной обмотки, току обмотки возбуждения и частоте вращения испытуемого двигателя М2, вводятся в компьютер А5.



Электрическая схема соединений (продолжение)

Указания по проведению эксперимента
· Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания.
· Соберите электрическую схему соединений тепловой защиты машины переменного тока.
· Соедините гнезда защитного заземления " " устройств, используемых в эксперименте, с гнездом «РЕ» трехфазного источника питания G1.
· Соедините аппаратуру в соответствии с электрической схемой соединений (вариант 1 для исследования двигателя с независимым возбуждением) / (вариант 2 для исследования двигателя с параллельным возбуждением) / (вариант 3 для исследования двигателя с последовательным возбуждением).
· Переключатели режима работы источника G2, возбудителя G3 и выключателя А6 установите в положение «РУЧН.».
· Регулировочные рукоятки источника G2 и возбудителя G3 поверните против часовой стрелки до упора.
· Установите суммарное сопротивление реостата А3 равным, например, 100 Ом.
· Установите в каждой фазе активной нагрузки А10 суммарную ее величину 100 %.
· Приведите в рабочее состояние персональный компьютер А5, и запустите прикладную программу «Регистратор режимных параметров машины постоянного тока».
· Включите выключатель «СЕТЬ» выключателя А6, блока датчиков тока и напряжения А12, указателя частоты вращения Р3.
· Включите источник G1. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся лампочки.
· Включите выключатель «СЕТЬ» источника G2 и, вращая его регулировочную рукоятку, установите на его выходе «ЯКОРЬ» напряжение, например, равное 200 В.
· Включите выключатель «СЕТЬ» возбудителя G3 и, вращая его регулировочную рукоятку, установите на его выходе напряжение, например, равное 10 В.
· Нажмите на виртуальную кнопку «Запустить» на экране компьютера.
· Нажмите последовательно кнопки «ВКЛ.» возбудителя G3, источника G2, спустя, например, 2 с выключателя А6 и не позднее, чем через 10 с, остановите сбор данных нажатием на виртуальную кнопку «Остановить». В результате должен осуществиться двухступенчатый пуск нагруженного двигателя постоянного тока М2 и должны записаться в компьютер данные о режимных параметрах на интервале пуска.
· Остановите запись процессов, нажав на виртуальную кнопку «Остановить».
· Нажмите кнопку «ОТКЛ.» источника G1.
· Отключите выключатель «СЕТЬ» возбудителя G3, источника G2, выключателя А6, блока датчиков тока и напряжения А12 и указателя частоты вращения Р3.
· Используя возможности программы «Регистратор режимных параметров машины постоянного тока», проанализируйте отображенные на мониторе компьютера механическую характеристику и временные зависимости тока якорной обмотки, электромагнитного момента, частоты вращения двигателя постоянного тока при пуске его в ход.
Задание 2
Определение механической характеристики n=f(М) двигателя постоянного тока с независимым / параллельным / последовательным возбуждением
Описание электрических схем соединений
Источник G1 - источник синусоидального напряжения промышленной частоты.
Источник питания G2 двигателя постоянного тока используется для питания регулируемым напряжением якорной обмотки и нерегулируемым напряжением обмотки возбуждения машины постоянного тока М2, работающей в режиме двигателя с независимым возбуждением и для питания регулируемым напряжением якорной обмотки и обмотки возбуждения машины постоянного тока М2, работающей в режиме двигателя с параллельным / последовательным возбуждением.
Возбудитель G3 служит для питания обмотки возбуждения машины переменного тока G6, работающей в режиме синхронного генератора.
Преобразователь угловых перемещений G5 генерирует импульсы, поступающие на вход указателя частоты вращения Р3 электромашинного агрегата.
Синхронный генератор G6 питает активную нагрузку А10, выступая в качестве нагрузочной машины.
С помощью мультиметров блока Р1 контролируются напряжение и ток якорной обмотки двигателя М2.



Указания по проведению эксперимента
· Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания.
· Соберите электрическую схему соединений тепловой защиты машины переменного тока.
· Соедините гнезда защитного заземления " " устройств, используемых в эксперименте, с гнездом "РЕ" трехфазного источника питания G1.
· Соедините аппаратуру в соответствии с электрической схемой соединений (вариант 1 для исследования двигателя с независимым возбуждением) / (вариант 2 для исследования двигателя с параллельным возбуждением) / (вариант 3 для исследования двигателя с последовательным возбуждением).
· Переключатели режима работы источника G2 и возбудителя G3 установите в положение "РУЧН.".
· Регулировочные рукоятки источника G2 и возбудителя G3 поверните против часовой стрелки до упора.
· Установите в каждой фазе активной нагрузки А10 суммарную ее величину 100 %.
· Включите выключатель «СЕТЬ» блока мультиметров Р1 и указателя частоты вращения Р3.
· Активизируйте мультиметры блока Р1, задействованные в эксперименте.
· Включите источник G1. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся лампочки.
· Включите выключатель "СЕТЬ" и нажмите кнопку "ВКЛ." источника G2.
· Вращая регулировочную рукоятку источника G2, разгоните двигатель М2 до частоты вращения n, например, равной 1500 мин-1.
· Включите выключатель "СЕТЬ" и нажмите кнопку "ВКЛ." возбудителя G3.
· Вращая регулировочную рукоятку возбудителя G3, изменяйте ток якоря I (ток не должен превышать значения 1,0 А)двигателя М2 и заносите показания амперметра Р1.1 (ток I),вольтметра Р1.2 (напряжение U якоря двигателя М2) и указателя Р3 (частота вращения n) в таблицу 13.2.
Таблица 13. 2.
| I, A | ||||||||||
| U, В | ||||||||||
| n, мин-1 |
· По завершении эксперимента сначала у возбудителя G3, а затем у источника G2 поверните регулировочную рукоятку против часовой стрелки до упора, нажмите кнопку "ОТКЛ." и отключите выключатель "СЕТЬ". Отключите источник G1 нажатием на кнопку – гриб.
· Используя данные таблицы 13.2., для каждого значения частоты вращения nвычислите по формуле
[H . м]
и занесите в табл. 13.3 значения электромагнитного момента двигателя М2.
Таблица 13. 3.
| n, мин-1 | ||||||||||
| М, Н·м |
· Используя данные таблицы 13.3 постройте искомую статическую механическую характеристику n=f(М) двигателя постоянного тока.
Контрольные вопросы:
1.Что означает термин «обратимость» машин постоянного тока?
2.Как осуществить «реверсирование» двигателя постоянного тока?
3.Изменить скорость вращения двигателя постоянного тока можно? …
4.Двигатели постоянного тока бывают?
5.Процессом коммутации двигателя постоянного тока называется?
6.С какой целью на двигателях постоянного тока установлены дополнительные полюса?
7.Что представляет собой электромашинный усилитель?
8.С какой целью используются электромашинные преобразователи?
9.Какую машину называют тахогенератором?
Литература
1. Теоретические основы электротехники, Т 1, 2. Учебник для вузов / К.С. Демирчан, Л.Р.Нейман, Н.В. Коровин, В.Л.Чечурин. – СПб: Питер, 2004
2. Основы теории цепей. Учебник для вузов / Г.В. Зевеке, П.А. Ионкин, А.В. Нетушил, С.В. Страхов. –М.: Энергоатом издат, 1989.
3. Атабеков Г.И. Основы теории цепей, Учебник для вузов. М.: Энергия, 1969.
4. Бессонов Л.А. Теоретические основы электротехники. Электрические цепи. Учебник для электротехн., энерг., приборостроит. спец. вузов. – М.: Гардарики, 2000.
5. Герасимов В.Г., Кузнецов Э.В., Николаева О.В. и др. Электротехника и электроника: В 3 кн. Учебник для студентов неэлектротехнических специальностей вузов. Кн 1. Электрические и магнитные цепи. – М.: Энергоатомиздат, 1996.
6. Борисов Ю.М., Липатов Д.Н. Электротехника / Учебное пособие для неэлектротехнических специальностей вузов. – М.: Энергоатомиздат, 1985.
7. Волынский Б.А., Зейн Е.Н., Матерников В.Е. Электротехника. Учебное пособие для вузов. – М.: Энергоатомиздат, 1985.
8. Касаткин А.С., Немцов М.В. Электротехника: [Учебное пособие для неэлектротехнических специальностей вузов]: В 2 кн. – М.: Энергоатомиздат, 1995.
9. Прошин В.М. Лабораторно-практические работы по электротехнике : учеб. пособие для нач. проф. образования. М.: Издательский центр «Академия»,2007.-192с.
10. Кацман М. М. Лабораторные работы по электрическим машинам и электрическому приводу: Учебн. Пособие для студ. Учреждений сред. Проф. Образования/ Марк Михайлович Кацман. – 3-е изд. Перераб. И доп.- М.: Издательский центр «Академия», 2004.- 256с.
[1] Порядок работы с мультиметрами и общий вид блока представлен в Лабораторной работе №1.
[2] Порядок работы с виртуальными измерительными приборами – Лабораторная работа №2
[3] В табл. 6.4 указаны значения сопротивлений RH для случая, когда W1 = W2 = 300 витков. При W2 = 900 витков их надо увеличить, а при W2 = 100 – уменьшить в 10 раз.
[4] В каждом варианте проводящего листа имеются одна или две оси симметрии, поэтому можно ограничиться исследованием половины или четверти проводящей области листа.
[5] В каждом варианте проводящего листа имеются одна или две оси симметрии, поэтому можно ограничиться исследованием половины или четверти проводящей области листа.
[6] в стенде без компьютера все измерения можно проделать с помощью мультиметров и электронного осциллографа.
[7] в стенде без компьютера все измерения можно проделать с помощью мультиметров и электронного осциллографа.
lektsia.com
Тахогенераторы постоянного тока.
Механика Тахогенераторы постоянного тока.
просмотров - 242
Микромашины постоянного тока
Представляют собой небольшие генераторы с независимым возбуждением или с возбуждением от постоянных магнитов. Конструктивно не отличаются от обычных машин постоянного тока малой мощности.
Принципиальная схема тахогенератора представлена на рисунке 4.1.1:
Рисунок 4.1.1
Входное напряжение тахогенератора изменяется по закону:
a - угол поворота;
k – постоянная величина.
n- частота вращения якоря.
Основным требованием к тахогенераторам является линейность выходной характеристики.
Тахогенераторы служат для преобразования механического перемещения в электрический сигнал – UВЫХ.
Выходное напряжение тахогенератора UГ может быть выражено как напряжение обычного генератора постоянного тока, через ЭДС якоря Еа, падение напряжения в обмотке якоря () и падение напряжения на щеточном контакте DUЩ.
(1)
следует выразить ЭДС якоря через магнитный поток и частоту вращения якоря:
(2) А ток якоря, выразить через напряжение на выходе и сопротивление нагрузки RНГ.
(3)
Подставив в (1), можно получить:
(4),
проведя преобразования, можно записать:
(5)
В случае если пренебречь падением напряжения на щеточном контакте, (ᴛ.ᴇ. принять DUЩ=0) выражение выходного напряжения примет вид:
(6)
При постоянных потоке, сопротивлении якоря и нагрузки( Ф=const, ra=const, RНГ=const)
, ᴛ.ᴇ. прямо пропорционально частоте вращения.
Зависимость напряжения на выходе тахогенератора UГ от частоты вращения якоря n принято называть выходной характеристикой.
Отклонение обозначается через k и принято называть крутизной выходной характеристики: .
На рисунке 4.1.2 представлены выходные характеристики тахогенератора постоянного тока. Чем меньше сопротивление нагрузки, тем меньше крутизна.
(холостой ход)
Наибольшая крутизна при RНГ=µ, с уменьшением RНГ, крутизна уменьшается (кривые 1 и 2):
В реальном тахогенераторе DUЩ¹0, в связи с этим выходная характеристика пересекает ось ординат не в начале координат, а в точке U’Г (прямая 3): за счет падения напряжения на щеточном контакте.
(7)
При n=0…nmin – зона нечувствительности. В этой зоне прибор не покажет напряжение.
Границу зоны нечувствительности можно определить, подставив в (7) UГ=0 и выразив n:
Рисунок 4.1.2
Наличие зоны нечувствительности является большим недостатком
тахогенераторов постоянного тока.
Для уменьшения зоны нечувствительности уменьшают сопротивление щеточного контакта rщ .
к примеру, применяют металлографитовые щетки.
В случае если магнитная система тахогенератора насыщена и RНГ невелико, то магнитный поток Ф тахогенератора не остается постоянным при работе. Он уменьшается на величину DФ с увеличением частоты n за счет размагничивающего действия реакции якоря. Выходная характеристика тахогенератора отклоняется от прямолинейной - кривая 4.
Τᴀᴋᴎᴍ ᴏϬᴩᴀᴈᴏᴍ, у тахогенератора появляется погрешность, которая доходит до 3%. Чтобы устранить погрешность, вызванную реакцией якоря, уменьшают насыщение тахогенератора.
Но уменьшение насыщения приводит к появлению температурной погрешности, ᴛ.ᴇ. с температурой меняется сопротивление обмотки возбуждения (за счет электрических потерь и внешних воздействий).
Изменение сопротивления обмотки возбуждения приводит к изменению тока возбуждения
, ᴛ.ᴇ. .
Поток зависит от тока IВ: , ᴛ.ᴇ. тоже и , что ведет к изменению крутизны выходной характеристики.
Чтобы устранить температурную погрешность крайне важно поддерживать постоянный магнитный поток. Это достигается двумя путями:
1. Выполнить машину насыщенной.
В случае если тахогенератор не насыщен, то изменение тока на DIВ ведет к большому изменению ЭДС (рис. 4.1.3).
При насыщении стремится к нулю. Но при этом увеличиваются размеры обмотки возбуждения, ᴛ.ᴇ. масса машины. Вместе с тем, насыщение увеличивает размагничивающее действие реакции якоря, что
рисунок 4.1.3 недопустимо при больших токах якоря.
2. Включить добавочное сопротивление rд, не зависящее от температуры (последовательно с обмоткой возбуждения).
так, чтобы , ᴛ.ᴇ.
, следовательно
В последнее время выпускают тахогенераторы с возбуждением от постоянных магнитов.
Достоинства таких тахогенераторов: Нет обмотки возбуждения, следовательно, температурная погрешность
(от изменения ra) незначительная. Тахогенератор (рисунок 4.1.4) не требует источника питания, может использоваться там, где нет электропитания. Постоянный магнит обеспечивает большую стабильность магнитного потока.
Недостаток: изменение характеристик тахогенератора в связи со старением постоянных магнитов, особенно при эксплуатации в условиях тряски, вибрации.
Рисунок 4.1.4
Достоинства тахогенераторов постоянного тока:
1. Полное отсутствие фазовой погрешности и влияния на показатели характера нагрузки(индуктивной, активной, емкостной) – на величину выходного напряжения(т.к. работает на постоянном токе).
2. Высокая линейность выходной характеристики.
3. Малые габариты и масса при увеличении выходной мощности.
Недостатки тахогенераторов постоянного тока:
1. Нестабильность выходной характеристики из-за изменения переходного сопротивления контактов.
2. Появление зоны нечувствительности при малых частотах вращения якоря.
3. Несимметрия выходной характеристики – неравенство напряжения при вращении якоря в различных направлениях.
Возникает при неточности установки щеток на геометрической нейтрали, а также за счет смещения щеток в процессе эксплуатации.
Ошибка асимметрии выходного напряжения обычно выражается в процентах:
UПР – напряжение при правом вращении якоря;
UЛ – напряжение при левом вращении якоря с одинаковой частотой.
4.2 Исполнительные двигатели постоянного тока.
Используются для преобразования электрического сигнала в механическое перемещение вала.
Достоинства:
1. Высокое использование активных материалов машины КПД=40…70%.
2. Отсутствие самохода.
3. Устойчивая механическая характеристика независимо от параметров машины.
4. Высокая степень линейности характеристик.
5. Хорошее быстродействие.
6. Возможность получения теоретически любых частот вращения.
7. Возможность просто, плавно, экономично и в широком диапазоне регулировать частоту вращения.
8. Значительный пусковой момент.
9. Малые габариты и масса по сравнению с использованными двигателями постоянного тока.
Недостаток:
Наличие скользящего контакта между щетками и коллектором приводит к снижению надежности.
Конструктивно исполнительные двигатели постоянного тока представляют собой коллекторную машину, у которой обмотка якоря и обмотка возбуждения питаются от двух независимых источников питания. В исполнительных двигателях нет дополнительных полюсов, т.к. реакция якоря невелика и коммутация удовлетворительная.
Исполнительные двигатели работают в основном в переходном режиме, ᴛ.ᴇ. для них характерны частотные пуски, остановки, реверсы.
По способу управления различают исполнительные двигатели с якорным и полюсным управлением.
Читайте также
Микромашины постоянного тока Представляют собой небольшие генераторы с независимым возбуждением или с возбуждением от постоянных магнитов. Конструктивно не отличаются от обычных машин постоянного тока малой мощности. Принципиальная схема тахогенератора... [читать подробенее]
Тахогенераторами называют электрические машины малой мощности, работающие в генераторном режиме и служащие для преобразования частоты его вращения в электрический сигнал. Тахогенераторы постоянного тока по принципу действия и конструктивному оформлению являются... [читать подробенее]
В некоторых случаях требуется преобразовать скорость какого-либо механизма в электрический сигнал—напряжение. Для этой цели применяют специальные электрические машины, называемые тахогенераторами. Тахогенератор постоянного тока является генератором постоянного... [читать подробенее]
oplib.ru
Тахогенераторы постоянного тока - Информация
Оглавление
- Предисловие ………………………………………………………стр.2
- Принцип работы………………………………………………стр.2
- Тахогенераторы постоянного тока в схемах автоматики………………………………………….стр.6
- Достоинства и недостатки…………………………………………..стр.7
- Список литературы…………………………………………..стр.8
Тахогенераторы постоянного тока
Предисловие
Уровень развития материальной культуры человеческого общества в первую очередь определяется созданием и использованием источников энергии. Применение пара, а в последние 100 лет электричества, совершило техническую революцию в промышленности и оказало решающее влияние на развитие социальных отношений. В настоящее время в наиболее развитых странах на одного человека приходится до 1О кВт всех видов энергии. Это примерно в 100 раз больше, чем мускульная мощность человека, которая еще 200 лет назад была основной в промышленности и сельском хозяйстве. С полным основанием можно считать, что сегодня технический и культурный уровень развития Государства определяется количеством электроэнергии, вырабатываемой на душу населения.
Основой для создания электрических машин и трансформаторов явился открытый М. Фарадеем закон электромагнитной индукции. Начало практического применения электрических машин было положено русским академиком Б. С. Якоби, который в 1834 г. создал конструкцию электрической машины, явившуюся прототипом современного электродвигателя. Практическое применение трансформаторов началось в 1876 г., когда русский ученый П. Н. Яблочков впервые применил трансформаторы для питания изобретенных им электрических свечей. Широкому применению электрических машин в промышленности способствовало изобретение русского инженера М. О. Доливо-Добровольского (1889) трехфазного асинхронного двигателя, отличающегося простотой конструкции и высокой надежностью. К началу ХХ в. были созданы почти все виды современных электрических машин и разработаны основы их теории. Начиная с этого времени быстрыми темпами происходит электрификация промышленности и транспорта.
Электрические машины малой мощности (микромашины), применяются в системах и устройствах автоматики и вычислительной техники в качестве функциональных элементов. Все электромашинные элементы автоматики разделяются на три группы: исполнительные двигатели, электромашинные усилители и информационные машины. Исполнительные двигатели осуществляют преобразование электрического сигнала в механическое перемещение, они могут быть асинхронными, постоянного тока и шаговыми. Электромашинные усилители служат для усиления мощности электрических сигналов. Информационные машины включают в себя тахогенераторы, сельсины, магнесины и вращающиеся трансформаторы. Эти машины служат для преобразования механических величин (угла поворота, частоты вращения или ускорения) в электрический сигнал или для передачи механического перемещения на расстояние.
Принцип работы
Тахогенератор постоянного тока - это машина постоянного тока с независимым возбуждением или возбуждением постоянными магнитами, работающая в генераторном режиме. По конструкции он почти не отличается от машин постоянного тока.
Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования.
Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе.
На. рис. 9.5 показаны принципиальные схемы тахогенераторов постоянного тока с электромагнитным возбуждением (а) и возбуждением постоянными магнитами (б).
В случае электромагнитного возбуждения обмотку возбуждения ОВ подключают к источнику постоянного тока (рис. 9.5, а). Тахогенератор возбуждается и если его
якорь привести во вращение с частотой n, то на выходе генератора появится постоянное напряжение Uвых. Уравнение выходной характеристики тахогенератора имеет вид
(1)
где rа - сопротивление обмотки якоря, Ом; Rн - внутреннее сопротивление прибора, подключенного к тахогенератору, Ом.
Если пренебречь падением напряжения в щеточном контакте ∆Uщ, то
(2)
Из (2) следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна у выходной характеристики, соответствующей режиму холостого хода тахогенератора, когда обмотка якоря разомкнута" (RH = ∞).
С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается (рис. 9.6, а). У современных тахогенераторов постоянного тока Сu = (6
260).10В/(об/мин), что превышает крутизну асинхронных тахогенераторов.
Выходная характеристика тахогенератора постоянного тока - прямая линия. Однако опыт показывает, что выходная хара
www.studsell.com











Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






