Cпособы регулирования скорости вращения асинхронного двигателя. Асинхронный двигатель 2 х скоростной
65. Трехфазные двухскоростные двигатели
| 65. Трехфазные двухскоростные двигатели |
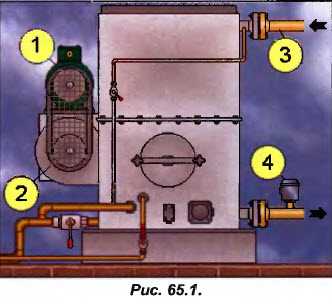 Трехфазные двигатели, позволяющие менять число оборотов, очень часто используются в воздушных охладителях для того, чтобы обеспечивать изменение расхода воздуха в соответствии с изменением его температуры: малая скорость (МС) при низкой температуре, например, зимой, и большая скорость (БС) при высокой температуре, например, летом (см. раздел 20.5).Как правило, двухскоростными двигателями также оснащаются градирни (их работа подробно рассматривается в разделе 73). На рис. 65.1 показан вариант градирни, оборудованной двухскорост-ным двигателем (поз. 1) для привода центробежного вентилятора (поз. 2).
Трехфазные двигатели, позволяющие менять число оборотов, очень часто используются в воздушных охладителях для того, чтобы обеспечивать изменение расхода воздуха в соответствии с изменением его температуры: малая скорость (МС) при низкой температуре, например, зимой, и большая скорость (БС) при высокой температуре, например, летом (см. раздел 20.5).Как правило, двухскоростными двигателями также оснащаются градирни (их работа подробно рассматривается в разделе 73). На рис. 65.1 показан вариант градирни, оборудованной двухскорост-ным двигателем (поз. 1) для привода центробежного вентилятора (поз. 2).
При выключенном вентиляторе и работающем компрессоре температура воды на входе в градирню (поз. 3) начинает повышаться. Термостат (поз. 4), установленный на выходе из градирни, обнаруживает подъем температуры и выдает команду на запуск двигателя с малой скоростью (МС). Если температура воды продолжает расти, термостат переводит двигатель на большую скорость (БС) и градирня работает с максимальной производительностью.
ДВИГАТЕЛЬ С ДВУМЯ РАЗДЕЛЬНЫМИ ОБМОТКАМИ
Это самый простой двигатель. Он представляет собой обычный двигатель, рассчитанный на одно значение напряжения трехфазного переменного тока и имеет клеммную коробку с 6 клеммами (поз. А на рис. 65.2). Схема подключения обмоток этого двигателя к клеммам показана в нижней части рис. 65.2.
Внутри такого двигателя имеются две абсолютно независимых обмотки, каждая из которых предназначена для реализации разного числа оборотов. Если питание подключено к клеммам Ш, IV и 1W двигатель вращается с малой скоростью МС (поз. В). Если питание подано на клеммы 2U, 2V и 2W, двигатель вращается с большой скоростью БС (поз. С).
ВНИМАНИЕ! Схема на рис. 65.2 очень похожа на схему двигателя с раздельным подключением обмоток PW (см. пункт 64.1). Чтобы избежать ошибок, внимательно ознакомьтесь с табличкой на корпусе двигателя и изучите схемы, в противном случае возможны непоправимые последствия.
Действительно, в отличие от двигателя PW, обмотки двухско-ростного двигателя, схема которого изображена на рис. 65.2, никогда не должны быть запитаны вместе, иначе двигатель мгновенно сгорит!
| 65.1. УПРАЖНЕНИЕ 1. Двигатель с раздельными обмотками |
Нарисуйте схему подключения обмоток и управления работой двухскоростного трехфазного двигателя, предназначенного для привода вентилятора градирни, зная, что переключение скоростей обеспечивается термостатом с двухступенчатой регулировкой температуры.В помощь вам на рис. 65.3 приведено обозначение клемм, имеющееся внутри клеммной коробки.
Решение упражнения 1
Схема подключения обмоток представлена на рис. 65.4.Двигатель может вращаться с МС (питание подано на клеммы 1U, 1V и 1W) или с БС (запита-ны клеммы 2U, 2V и 2W).Треугольник вершиной вниз указывает на то, что между контакторами МС и БС существует механическая блокировка. Благодаря ей, как только один из контакторов замкнут, становится невозможным замкнуть другой контактор, даже если вы случайно нажали на него рукой.
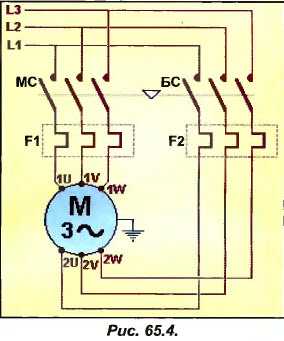 Такой тип блокировки позволяет избежать ошибки, обусловленной человеческим фактором. Действительно, если замкнуть оба этих контактора одновременно, даже на несколько тысячных долей секунды, двигатель может мгновенно сгореть: напоминаем, что при нормальной температуре скорость электронов равна примерно 250000 км/с, то есть более чем 6 раз в секунду позволяет обернуться вокруг Земли!Существует и другая опасность: представим себе, что двигатель вращается со скоростью 960 об/мин (МС) и в этот момент размыкается контактор МС и замыкается контактор БС, чтобы обеспечить вращение со скоростью 1450 об/мин, но в другом направлении! Момент сопротивления на валу двигателя в этом случае оказался бы невероятно большим, двигатель подвергся бы очень высоким механическим и электрическим нагрузкам и, в лучшем случае, сработало бы реле тепловой защиты. В худшем случае двигатель просто бы сгорел.Поэтому абсолютно необходимо, чтобы при переключении с режима МС на режим БС двигатель продолжал вращаться в том же направлении. То есть порядок подключения фаз должен соблюдаться одинаковым. Иначе говоря, если фаза L1, например, подключена к клемме Ш для режима МС, то эта же фаза L1 должна быть подведена и к клемме 2U для режима БС
Такой тип блокировки позволяет избежать ошибки, обусловленной человеческим фактором. Действительно, если замкнуть оба этих контактора одновременно, даже на несколько тысячных долей секунды, двигатель может мгновенно сгореть: напоминаем, что при нормальной температуре скорость электронов равна примерно 250000 км/с, то есть более чем 6 раз в секунду позволяет обернуться вокруг Земли!Существует и другая опасность: представим себе, что двигатель вращается со скоростью 960 об/мин (МС) и в этот момент размыкается контактор МС и замыкается контактор БС, чтобы обеспечить вращение со скоростью 1450 об/мин, но в другом направлении! Момент сопротивления на валу двигателя в этом случае оказался бы невероятно большим, двигатель подвергся бы очень высоким механическим и электрическим нагрузкам и, в лучшем случае, сработало бы реле тепловой защиты. В худшем случае двигатель просто бы сгорел.Поэтому абсолютно необходимо, чтобы при переключении с режима МС на режим БС двигатель продолжал вращаться в том же направлении. То есть порядок подключения фаз должен соблюдаться одинаковым. Иначе говоря, если фаза L1, например, подключена к клемме Ш для режима МС, то эта же фаза L1 должна быть подведена и к клемме 2U для режима БС
А кстати, прежде чем читать дальше, вы нарисовали схему управляющей цепи?
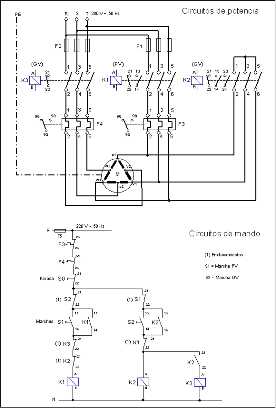
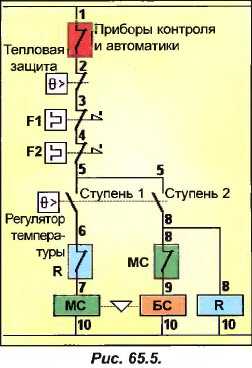 Принципиальная схема цепи управления представлена на рис. 65.5.Если приборы контроля, управления и безопасности разрешают запуск двигателя, напряжение подается на контакт 2. Если реле тепловой защиты (контакты 2-3) и плавкий предохранитель (контакты 3-4 и 4-5) замкнуты, напряжение подается на контакт 5 регулятора температуры воды на выходе из градирни, который является общим для двух ступеней регулирования температуры.Допустим, что температура воды низкая. Тогда оба контакта 5 разомкнуты и обмотки МС, БС и R не за-питаны. Когда температура воды начнет расти, контакты 5-6 замыкаются и через нормально замкнутые контакты 6-7 реле R подается питание на реле МС, обеспечивающее работу двигателя на режиме МС.При этом размыкаются нормально замкнутые контакты 8-9 реле МС. Когда расход теплой воды в градирню увеличится и температура воды поднимется еще больше, регулятор температуры замкнет контакты 5-8. В результате будет подано напряжение на реле R, вследствие чего разомкнутся контакты 6-7, обесточится реле МС и замкнутся контакты 8-9 реле МС. Напряжение поступит на реле БС и двигатель перейдет на режим БС (заметим, что в этом случае момент сопротивления на валу двигателя будет очень небольшим, поскольку двигатель уже работал на режиме МС).Далее, если температура воды упадет, реле-регулятор температуры разомкнет контакты 5-8 второй ступени. Вследствие этого будет снято напряжение с реле БС и реле R. Контакты 6-7 реле R замкнутся, будет подано напряжение на реле МС, после чего разомкнутся контакты 8-9 и двигатель вновь перейдет на режим МС.В нашем примере двигатель на режиме БС вращался со скоростью 1450 об/мин и, как только разомкнутся контакты 8-9, он тут же переходит на режим МС, когда вращение осуществляется со скоростью 960 об/мин. Иначе говоря, происходит мгновенное замедление скорости вращения от значения 1450 об/мин до значения 960 об/мин. Усилие, необходимое при этом для того, чтобы затормозить двигатель, является причиной возникновения значительных механических нагрузок и, как следствие, заметного пика по току в цепи питания обмотки МС.Этот недостаток можно устранить (см. рис. 65.6), установив вместо реле мгновенного срабатывания реле R с временной задержкой (такое реле часто называют реле замедленного действия).
Принципиальная схема цепи управления представлена на рис. 65.5.Если приборы контроля, управления и безопасности разрешают запуск двигателя, напряжение подается на контакт 2. Если реле тепловой защиты (контакты 2-3) и плавкий предохранитель (контакты 3-4 и 4-5) замкнуты, напряжение подается на контакт 5 регулятора температуры воды на выходе из градирни, который является общим для двух ступеней регулирования температуры.Допустим, что температура воды низкая. Тогда оба контакта 5 разомкнуты и обмотки МС, БС и R не за-питаны. Когда температура воды начнет расти, контакты 5-6 замыкаются и через нормально замкнутые контакты 6-7 реле R подается питание на реле МС, обеспечивающее работу двигателя на режиме МС.При этом размыкаются нормально замкнутые контакты 8-9 реле МС. Когда расход теплой воды в градирню увеличится и температура воды поднимется еще больше, регулятор температуры замкнет контакты 5-8. В результате будет подано напряжение на реле R, вследствие чего разомкнутся контакты 6-7, обесточится реле МС и замкнутся контакты 8-9 реле МС. Напряжение поступит на реле БС и двигатель перейдет на режим БС (заметим, что в этом случае момент сопротивления на валу двигателя будет очень небольшим, поскольку двигатель уже работал на режиме МС).Далее, если температура воды упадет, реле-регулятор температуры разомкнет контакты 5-8 второй ступени. Вследствие этого будет снято напряжение с реле БС и реле R. Контакты 6-7 реле R замкнутся, будет подано напряжение на реле МС, после чего разомкнутся контакты 8-9 и двигатель вновь перейдет на режим МС.В нашем примере двигатель на режиме БС вращался со скоростью 1450 об/мин и, как только разомкнутся контакты 8-9, он тут же переходит на режим МС, когда вращение осуществляется со скоростью 960 об/мин. Иначе говоря, происходит мгновенное замедление скорости вращения от значения 1450 об/мин до значения 960 об/мин. Усилие, необходимое при этом для того, чтобы затормозить двигатель, является причиной возникновения значительных механических нагрузок и, как следствие, заметного пика по току в цепи питания обмотки МС.Этот недостаток можно устранить (см. рис. 65.6), установив вместо реле мгновенного срабатывания реле R с временной задержкой (такое реле часто называют реле замедленного действия).
В тот момент, когда по команде регулятора температуры размыкаются контакты 5-8 второй ступени, реле БС обесточивается, также как и обмотка реле R замедленного действия (рис. 65.6). Однако контакты 6-7 реле R остаются разомкнутыми в течение заданного времени задержки (в данном случае 3 секунды) после снятия с него напряжения. В течение этого времени у нас не подается напряжение ни на обмотку БС, ни на обмотку МС. Вращение двигателя замедляется, причем тем быстрее, чем больше момент сопротивления на вентиляторе.
Спустя 3 секунды контакты 6-7 реле R замыкаются.К этому моменту вращение двигателя замедляется до скорости, близкой к 960 об/мин. На обмотку МС подается напряжение и двигатель продолжает вращаться со скоростью 960 об/мин не испытывая ни механических пиковых нагрузок, ни забросов по току.
vmestogaza.ru
Скоростные электродвигатели
Скоростной электродвигатель – это так называемый асинхронный электродвигатель, в котором обычно находится короткозамкнутый ротор, также имеющий одну или несколько обмоток статора. Мотор можно переключать на разные числа полюсов, которые, в свою очередь, соответствуют разным синхронным скоростям поля.
Многоскоростные электрические двигатели
- Наиболее распространены на производствах 2-х и 3-х скоростные электродвигатели, так как они обладают более простой коммутацией обмотки.
- Практически во всех 2-х скоростных электродвигателях с одной обмоткой на статоре установлено отношение угловых скоростей как 1:2, а в 3-х и 4-х скоростных, имеющих две обмотки на статоре отношение равно 1:1, 5:2 и 1:1,5:3.
- Многоскоростные электродвигатели применяют чаще всего в приводах машин и механизмов, которые допускают в своей работе ступенчатое регулирование отношения угловых скоростей.
- Мощность многоскоростных двигателей достигает нескольких МВт, что является достаточно высоким показателем и благодаря этому обеспечивается хорошая производительность и эффективность работы.
Преимущества скоростных электродвигателей
Данный вид электродвигателей имеет ряд существенных преимуществ перед другими моторами, например, скоростные двигатели отличаются более простой конструкцией, неприхотливостью в обслуживании, дешевизной работы, а также достаточно просты в эксплуатации. Все это ведет к тому, что моторы используются во многом оборудовании, которое можно встретить практически везде.
Кроме этого, скоростные асинхронные электродвигатели - это универсальные устройства, которое широко применяются в самых различных хозяйственных сферах. Они обеспечивают качественную работу металлорежущих и деревообрабатывающих станков, пассажирских и грузовых лифтов и приводят в действие насосы, вентиляторы и т.д. Приобрести скоростные электродвигатели можно в нашей компании по демократичным ценам.
Просмотров: 3000
Дата: Суббота, 18 Январь 2014
www.rosdiler-electro.ru
Как подключить многоскоростной трехфазный электродвигатель
Схема присоединения многоскоростного асинхронного электродвигателя с короткозамкнутым ротором Треугольник(или звезда)\\ двойная звезда ------ Д/YY.
Низшая скорость — Д(треугольник(или звезда Y ): 750 об мин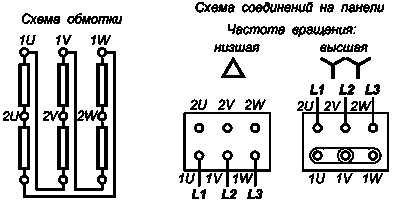 2U, 2V, 2W свободны, на 1U, 1V, 1W подается напряжение. Высшая скорость — YY. 1500 об мин.1U, 1V, 1W замкнуты между собой, на 2U, 2V, 2W подается напряжениеДвухскоростные двигатели имеют одну полюсопереключаемую обмотку с шестью выводными концами. Обмотка двигателей с соотношением частот вращения 1 : 2 выполняется по схеме Даландера и соединяется в треугольник Д (или в звезду Y) при низшей частоте вращения и в двойную звезду (YY) при высшей частоте вращения Схема соединения обмоток показана на рисунке.Средняя скорость. 1000 об мин. Обмотка на 1000 об мин подключается независимо от остальных своим пускателем, не участвующим в схеме Даландера.Запуск двухскоростного двигателя с переключающимися полюсами без инверсии вращения для схемы Даландера.Электрические характеристики элементов контроля и защиты необходимые для выполнения этого типа запуска, как минимум должны быть: Контактор К1, для включения и выключения двигателя на маленькой скорости (PV). Мощность должна быть такой же либо превышать In двигателя в треугольном соединении и с категорией обслуживания АС3.Контакторы К2 и К3, для включения и выключения двигателя на большой скорости (GV). Мощность этих контакторов должна быть такой же либо превышать In двигателя соединенного двойной звездой и категориеи обслуживания АС3.Термореле F3 и F4, для защиты от перегрузок на обоих скоростях. Каждый из них будет измерять In, употребляемый двигателем на защищаемой скорости.Предохранители F1 и F2, для защиты от К.З. должно быть типа аМ и мощностью такой же или превышающей максимальное In двигателя, в каждой из своих двух скоростей.Предохранитель F5, для защиты цепей контроля.Система кнопок, с простым прерывателем остановки S0 и двумя двойными прерывателями движения S1 и S2.Перейдем к описанию в краткой форме процесса запуска, как на малой скорости, так и на большой: а) запуск и остановка на маленькой скорости (PV).Запуск путем нажатия на S1.Замыкание контактора цепи К1 и запуск двигателя соединенного треугольником.Автопитание через (К1, 13–14).Открытие К1, которое действует как шторка для того, чтобы хотя запущен в движение S2, контакторы большой скорости К2 и К3 не были активизированы.Остановка путем нажатия на S0.б) запуск и остановка на большой скорости (GV).Запуск путем нажатия на S2.Замыкание контактора звезды К2, которое формирует звезду двигателя при коротком замыкании: U1, V1 и W1.Замыкание контактора К3 (К2, 21–22) таким образом, что двигатель работает соединением в двойную звезду.Автопитание через (К2, 13–14).Открытие (К2, 21–22) и (К3, 21–22), которые действуют как шторки для того, чтобы никогда не закрывался К1 в то время, как закрыты К2 или К3.Остановка путем нажатия на S0.Вспомогательные контакты системы кнопок (S1 и S2, 21–22)действуют как защитные двойные шторки системы кнопок в том случае, если на оба прерывателя попытаются нажать одновременно, чтобы никакой из контакторов не активизировался и эти контакты можно было бы убрать в том случае, если есть защитные шторки механического типа между К1 и К2.
2U, 2V, 2W свободны, на 1U, 1V, 1W подается напряжение. Высшая скорость — YY. 1500 об мин.1U, 1V, 1W замкнуты между собой, на 2U, 2V, 2W подается напряжениеДвухскоростные двигатели имеют одну полюсопереключаемую обмотку с шестью выводными концами. Обмотка двигателей с соотношением частот вращения 1 : 2 выполняется по схеме Даландера и соединяется в треугольник Д (или в звезду Y) при низшей частоте вращения и в двойную звезду (YY) при высшей частоте вращения Схема соединения обмоток показана на рисунке.Средняя скорость. 1000 об мин. Обмотка на 1000 об мин подключается независимо от остальных своим пускателем, не участвующим в схеме Даландера.Запуск двухскоростного двигателя с переключающимися полюсами без инверсии вращения для схемы Даландера.Электрические характеристики элементов контроля и защиты необходимые для выполнения этого типа запуска, как минимум должны быть: Контактор К1, для включения и выключения двигателя на маленькой скорости (PV). Мощность должна быть такой же либо превышать In двигателя в треугольном соединении и с категорией обслуживания АС3.Контакторы К2 и К3, для включения и выключения двигателя на большой скорости (GV). Мощность этих контакторов должна быть такой же либо превышать In двигателя соединенного двойной звездой и категориеи обслуживания АС3.Термореле F3 и F4, для защиты от перегрузок на обоих скоростях. Каждый из них будет измерять In, употребляемый двигателем на защищаемой скорости.Предохранители F1 и F2, для защиты от К.З. должно быть типа аМ и мощностью такой же или превышающей максимальное In двигателя, в каждой из своих двух скоростей.Предохранитель F5, для защиты цепей контроля.Система кнопок, с простым прерывателем остановки S0 и двумя двойными прерывателями движения S1 и S2.Перейдем к описанию в краткой форме процесса запуска, как на малой скорости, так и на большой: а) запуск и остановка на маленькой скорости (PV).Запуск путем нажатия на S1.Замыкание контактора цепи К1 и запуск двигателя соединенного треугольником.Автопитание через (К1, 13–14).Открытие К1, которое действует как шторка для того, чтобы хотя запущен в движение S2, контакторы большой скорости К2 и К3 не были активизированы.Остановка путем нажатия на S0.б) запуск и остановка на большой скорости (GV).Запуск путем нажатия на S2.Замыкание контактора звезды К2, которое формирует звезду двигателя при коротком замыкании: U1, V1 и W1.Замыкание контактора К3 (К2, 21–22) таким образом, что двигатель работает соединением в двойную звезду.Автопитание через (К2, 13–14).Открытие (К2, 21–22) и (К3, 21–22), которые действуют как шторки для того, чтобы никогда не закрывался К1 в то время, как закрыты К2 или К3.Остановка путем нажатия на S0.Вспомогательные контакты системы кнопок (S1 и S2, 21–22)действуют как защитные двойные шторки системы кнопок в том случае, если на оба прерывателя попытаются нажать одновременно, чтобы никакой из контакторов не активизировался и эти контакты можно было бы убрать в том случае, если есть защитные шторки механического типа между К1 и К2.
sampolim-spb.ru
Регулятор скорости вращения асинхронного электродвигателя | Электирика
» Электирика
Регуляторы скорости, запуск и торможение двигателей
Эта статья будет посвящена двигателям - возможности регулировки скорости вращения, запускам и торможению.
Однофазные конденсаторные электродвигатели отличаются от однофазных асинхронных электродвигателей с пусковой обмоткой и конденсаторным пуском тем, что рабочая и фазосдвигающая (конденсаторная) обмотки создают вращающееся магнитное поле как в момент пуска, так и при работе электродвигателя. Обе обмотки рассчитаны на длительный режим работы.
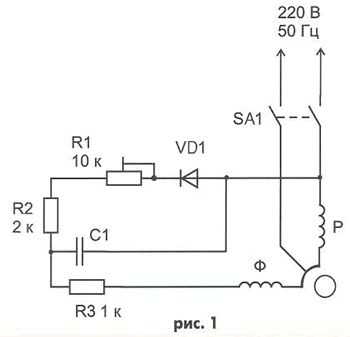
Одна из схем регулятора скорости для однофазного конденсаторного двигателя показана на рис.1.
Действие данного регулятора скорости вращения основано на зависимости скорости вращения от величины постоянного тока через фазосдвигающую (конденсаторную) обмотку. Выпрямленное диодом VD1 напряжение через резисторы R1, R2, R3 подается на фазосдвигающую обмотку.
Фазосдвигающий конденсатор служит одновременно для фильтрации выпрямленного напряжения, величину которого регулируют подстроечным резистором R1.
Минимальная скорость вращения зависит от надежного запуска двигателя и выставляется резистором R2. Для этого необходимо отключить двигатель, вывести резистор R1 в положение максимального сопротивления, а на место R2 временно установить переменный резистор на 2-3кОм. Желательно тоже вывести в максимальное положение. Включить в сеть и резистором R2 установить минимально возможные обороты. Далее выключить его на небольшое время и попытаться его запустить с выставленным таким способом сопротивлением R2. Если самостоятельного пуска не происходит - уменьшить еще немного сопротивление R2. Пробовать до тех пор, пока не произойдет самостоятельного надежного пуска. После этого можно измерть значение R2 и заменить его постоянным резистором. Если двигатель очень малой мощности, можно уменьшить значение R1.
Рекомендуемые детали : Резистор R1 типа ППЕ-3В или ППБ-15Е R1 и R2 - ПЭВ-7,5 VD1 - КД227Ж или с похожими параметрами С1 - штатный конденсатор данного двигателя.
* по материалам статьи В.Ф. Яковлева Регулятор скорости для однофазных конденсаторных двигателей
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя. изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 - s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 - 3). 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя. позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
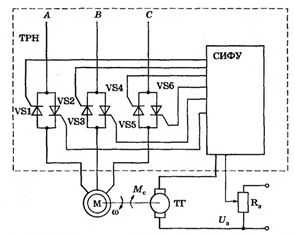
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения - асинхронный двигатель (ТРН - АД)
Замкнутая схема управления асинхронным двигателем. выполненным по схеме тиристорный регулятор напряжения - электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30). 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
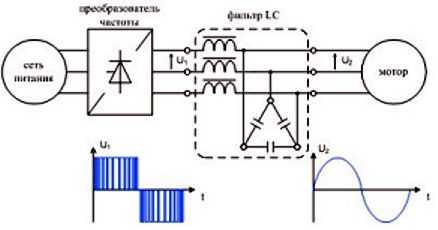
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
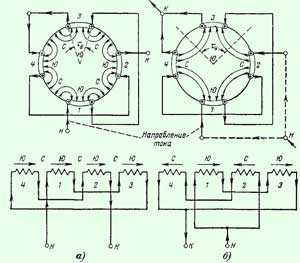
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную б - с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А. Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Способы регулирования скорости асинхронного двигателя
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120 . Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2. 1 = р2. pt. 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2. 1 = Рг. Pi. 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Источники: http://slavapril.narod.ru/upravlenie_dvig.html, http://electricalschool.info/spravochnik/maschiny/661-regulirovanie-skorosti-.html, http://ukrlot.com/regulirovanie_asinhronnogo_dvigatel.html
Комментариев пока нет!restart24.ru
Cпособы регулирования скорости асинхронного двигателя
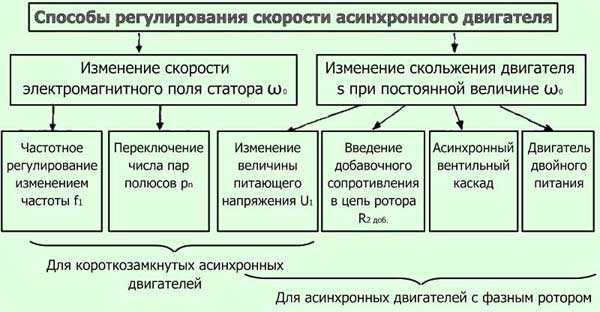
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
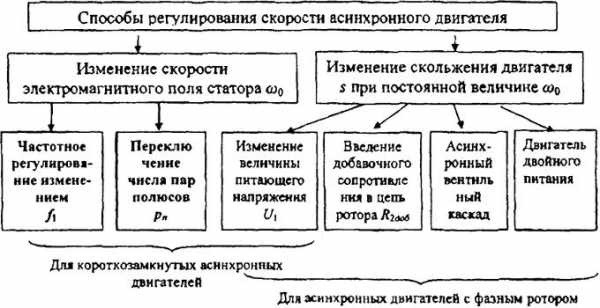
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
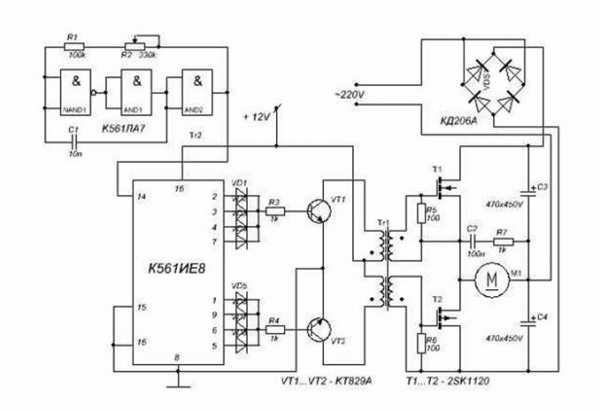
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
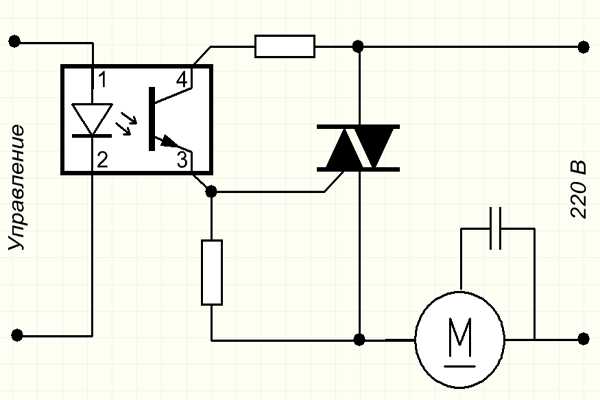
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
electricdoma.ru
Способы регулирования скорости асинхронного двигателя
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2 : 1 = р2 : pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2 : 1 = Рг : Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
• Скачать схемы обмоток многоскоростных асинхронных двигателей
• Скачать лекцию "Регулирование частоты вращения асинхронных двигателей"
Свежие записи:
ukrlot.com
Регулирование скорости изменением числа пар полюсов - Help for engineer
Регулирование скорости изменением числа пар полюсов
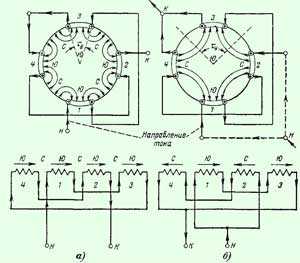
Регулирование скорости изменением числа пар полюсов стало возможным из-за секционной конструкции статора асинхронного двигателя с короткозамкнутым ротором. На практике выпускаются 2-х, 3-х, 4-х скоростные асинхронные двигатели, где число пар полюсов всегда кратно целому числу, вследствие чего, данный способ обеспечивает только ступенчатое регулирования скорости, а двигатели получили название многоскоростные. На деле существует большое количество схем включения обмоток статора, но наиболее часто используемые:
- переключение обмотки треугольник-двойная звезда; - переключение обмотки звезда-двойная звезда.
Треугольник-двойная звезда
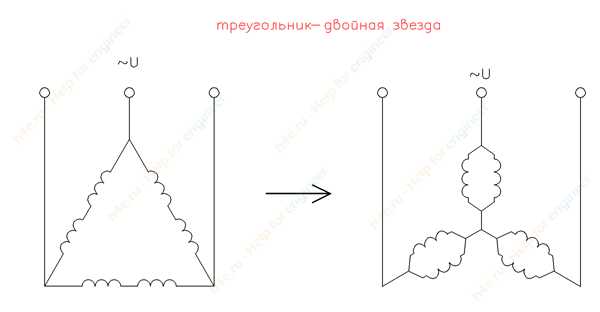
Рисунок 1 – Схема переключения треугольник-двойная звезда
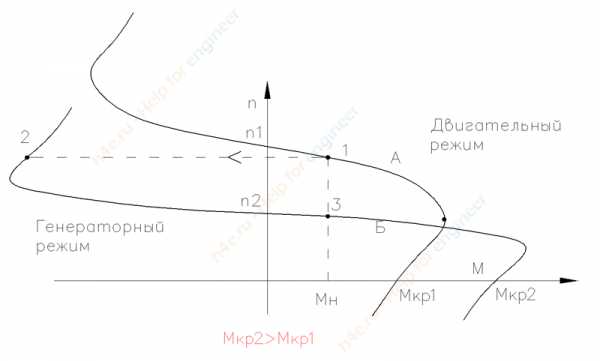
Рисунок 2 – Механическая характеристика при переключение с треугольника на двойную звезду
А - треугольник; Б - двойная звезда.
Данный тип регулирования скорости, в частных случаях осуществляет переключение скорости с некоторой временной рекуперацией энергии. Этот способ переключения занял нишу в грузоподъемных механизмах. Вы можете видеть, что при увеличении числа пар полюсов, скорость падает вдвое, но критический момент возрастает тоже в два раза, что дает нам возможность осуществлять подъем, но с более медленной скоростью. Называют такое условие работы – «тяговый» режим.
Сравнивая мощности, видно, что мощность изменяется незначительно, а скорость ступенчатым образом изменяется вдвое.
Рассматривая подробнее механическую характеристику при таком переключении, мы можем заметить, что работая в точке 1, кривая А, при включении на схему двойная звезда, асинхронный двигатель перейдет в точку 2 кривая Б, и начнет происходить рекуперативное торможение, до того момента, пока двигатель не перейдет в двигательный режим, а далее в точку работы 3 кривая Б. Данное торможение возможно, когда скорость вращения ротора асинхронного двигателя больше чем синхронная скорость. Частным примером такой работы мы рассмотрели в предыдущей статье про торможение противовключением, в которой рассказывалось как производят спуск груза в грузоподъемных механизмах с отдачей энергии в сеть.
Звезда-двойная звезда
Рисунок 3 – Схема переключения звезда-двойная звезда
Рисунок 4 – Механическая характеристика при переключение со звезды на двойную звезду
А - звезда; Б - двойная звезда.
На рисунке выше видно, что критическим момент остается прежним, а синхронная скорость уменьшается вдвое.
Говоря про мощность, то при переключении на двойную звезду, она возрастает вдвое. При переключении обмоток, работая в точке 1 кривая А, перейдем в точку 2 кривая Б, и с точки 2 в точку 3, так же как и в предыдущем случае будет осуществляться рекуперативное торможение.
Добавить комментарий
h4e.ru





Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






