2.2. Двигатель постоянного тока независимого возбуждения (дпт-нв). Дпт независимого возбуждения принцип действия
Устройство и принцип действия ДПТ
Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
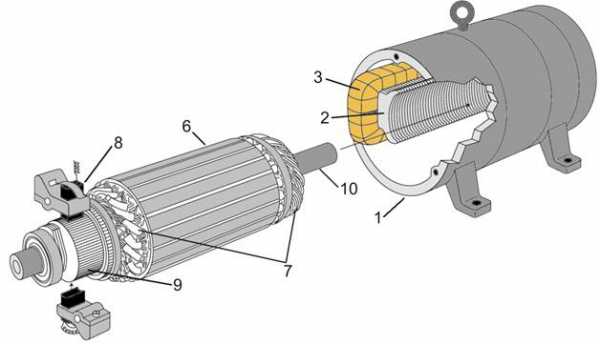
Рис. 1. Внешний вид двигателя постоянного тока
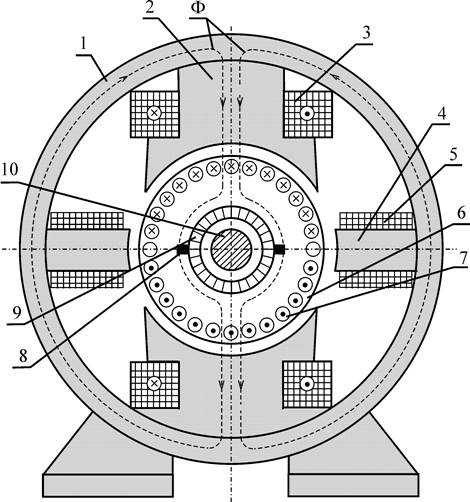
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями и . Как правило, . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.

Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
, (1)
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
(2)
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
(3)
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов и скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
(4)
Значение сопротивления относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Похожие статьи:
poznayka.org
2.2. Двигатель постоянного тока независимого возбуждения (дпт-нв)
Обмотки возбуждения и якоря этого двигателя питаются от разных источников (рис. 2.3,а). Где UB и IB – напряжение источника питания и ток обмотки возбуждения; U и IЯ – напряжение источника питания и ток якоря. Функцию обмотки возбуждения у таких двигателей может выполнять и постоянный магнит (рис. 2.3,б).
Для двигателя с независимым возбуждением величинаСМ Ф = const, поэтому вид электромеханической и механической характеристики в соответствии с (2.4) и (2.5) будет один и тот же (рис. 2.3).
Характерные точки характеристик
1. ПриIЯ = 0 и М = 0; ω = ωхх (ωхх – скорость холостого хода двигателя). В режиме холостого хода механическая нагрузка на валу двигателя отсутствует.
2. При ω = 0; IЯ = IП и М = МП (IП и МП – пусковой ток и пусковой момент двигателя). В литературе их иногда называют как IКЗ и МКЗ (током и моментом короткого замыкания), т.к. режим короткого замыкания для электродвигателя соответствует неподвижному состоянию якоря, а не замыканию его электрических цепей между собой или на корпус.
2.2.1. Регулирование частоты вращения двигателя постоянного тока независимого возбуждения
Основное преимущество двигателей постоянного тока перед двигателями переменного тока – это относительная легкость регулирования частоты вращения. Известно несколько способов регулирования скорости, которые можно получить из анализа зависимостей (2.4) или (2.5). Регулирование осуществляют: путем изменения сопротивления обмотки якоря, точнее включением последовательно с ней добавочного сопротивления; изменением потока возбуждения или напряжения питания якоря.
Первый способ отличают небольшие затраты на его осуществление, но при эксплуатации, из-за больших потерь мощности на добавочном сопротивлении, его целесообразно применять только для маломощных двигателей и там, где не предъявляется больших требований к стабильности скорости, т.к. этот способ снижает жесткость механической характеристики двигателя.
Н а практике изменение магнитного потока возбуждения возможно только в сторону его уменьшения, т.к. при увеличении потока, требуется повысить ток возбуждения выше номинального, что приведет к перегреву обмотки возбуждения и двигателя в целом. Кроме того, двигатель рассчитан и сконструирован так, что его магнитная система близка к насыщению, поэтому увеличение тока возбуждения не приведет к заметному росту потока возбуждения. Однако, уменьшение потока возбуждения из (2.4) приводит к росту скорости двигателя. На практике же в большинстве случаев требуется ее снижать, что в данном способе невозможно.
а практике изменение магнитного потока возбуждения возможно только в сторону его уменьшения, т.к. при увеличении потока, требуется повысить ток возбуждения выше номинального, что приведет к перегреву обмотки возбуждения и двигателя в целом. Кроме того, двигатель рассчитан и сконструирован так, что его магнитная система близка к насыщению, поэтому увеличение тока возбуждения не приведет к заметному росту потока возбуждения. Однако, уменьшение потока возбуждения из (2.4) приводит к росту скорости двигателя. На практике же в большинстве случаев требуется ее снижать, что в данном способе невозможно.
Поэтому лучшим способом является регулирование скорости путем изменения напряжения питания якоря. В этом способе якорь двигателя подключают к регулируемому источнику постоянного тока, в качестве которого обычно служит управляемый выпрямитель УВ рис. 2.5. Управляемый выпрямитель обычно питается переменным трехфазным напряжением. Величиной выходного постоянного напряжения U управляют, например, путем изменения величины управляющего напряжения UУ, что может осуществлять оператор или система автоматического регулирования. Регулировочные механические характеристики при этом имеют вид, показанный на рис. 2.6. Они имеют вид прямых с одинаковым наклоном к оси абсцисс, т.е. жесткость (наклон) характеристики не меняется с изменением скорости вращения.
Реверс двигателя (изменение направления вращения якоря) осуществляют, меняя полярность источника питания якорной цепи или цепи возбуждения.
studfiles.net
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iвне зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
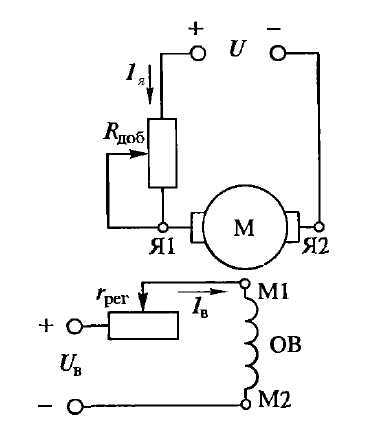 Рисунок 1
Рисунок 1Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
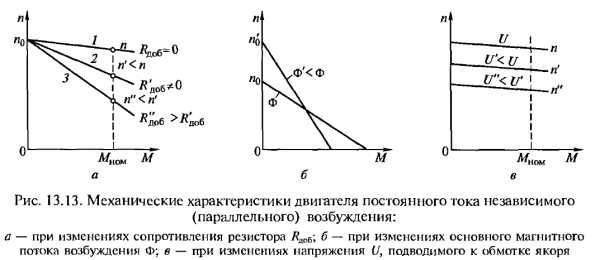
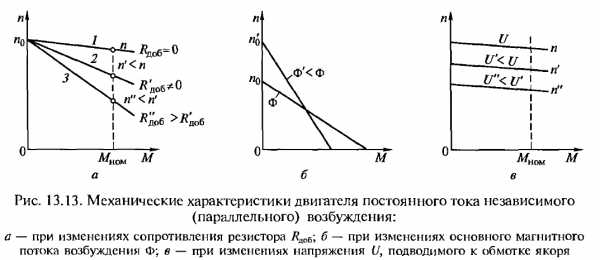
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
откуда:
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
electrikam.com
32. Основные схемы включения дпт. Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
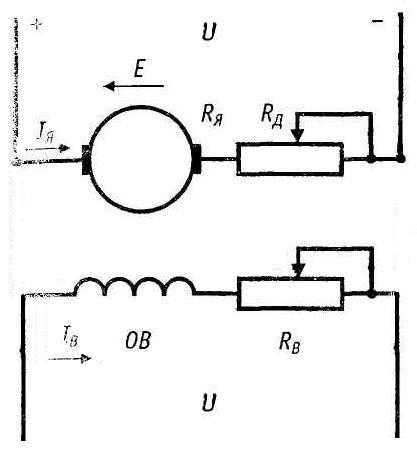
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.

Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.

Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
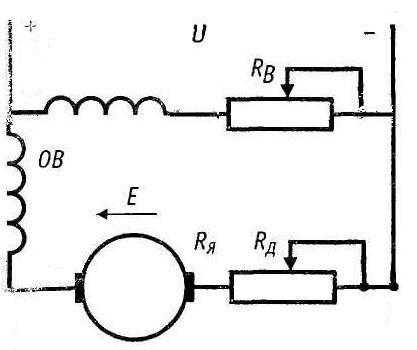
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
 Рисунок 1
Рисунок 1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
откуда:
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
studfiles.net
Возбуждение двигателя постоянного тока
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.

ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.

ДПТ со смешанным возбуждением
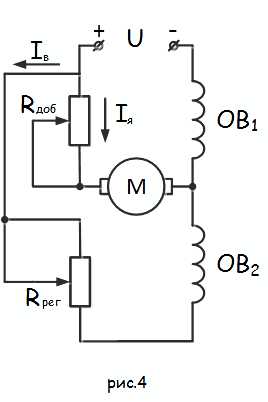
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Похожие публикации
electroandi.ru
Изучение принципа действия двигателя постоянного тока с независимым возбуждением
Исследование двигателя постоянного тока с независимым возбуждением.
1.Цель работы.
Целью работы является изучение принципа действия двигателя постоянного тока с независимым возбуждением, исследование его механических характеристик, его регулировочных свойств и способов регулирования частоты вращения.
2. Краткие теоретические сведения.
Двигатель постоянного тока (ДПТ) состоит из:
- неподвижной части – статора
- вращающейся части – ротора.
Для создания магнитного потока на внутренней поверхности статора укрепляют четное число полюсов с расположенными на них обмотками возбуждения, по которым пропускают постоянный ток.
Ротор в ДПТ выполняет функцию якоря – элемент машины, вырабатывающий электродвижущую силу (ЭДС).
Якорь расположен на валу ДПТ и выполнен из пакета тонких (0,3-0,5мм) листов электротехнической стали с пазами, в которых располагается обмотка якоря (ОЯ), присоединенная к коллекторным пластинам коллектора, выполняющего функцию механического инвертора (преобразователя постоянного напряжения в переменное).
На коллектор налагается система щеток, являющихся токосъемником с вращающегося коллектора.
В зависимости от схемы включения обмоток возбуждения различают ДПТ с независимым, параллельным и последовательным возбуждением.
При независимом возбуждении обмотки возбуждения (ОВ) питаются от постоянного источника электрической энергии постоянного напряжения.
При параллельном возбуждении – обмотка возбуждения включается параллельно обмотке якоря.
При последовательном - последовательно обмотке якоря.
Анализ режимов работы двигателя можно произвести на базе основных уравнений, описывающих его работу.
U = Ея + IяКя; (1)
Ея = СеФ п; (2)
М = СмФ1я; (3)
где U - напряжение питания двигателя;
Ея - противо - э.д.с., индуктируемая в обмотке якоря;
Iя - ток якоря;
Rя - сопротивление обмотки якоря;
Се - конструктивная постоянная двигателя:
PN Се = ----- (4)
60а
Р - число пар главных полюсов двигателя;
N - число активных проводников якоря;
А - число параллельных ветвей обмотки якоря;
n - частота вращения якоря;
М - электромагнитный момент двигателя;
См - моментная постоянная двигателя:
PN
См =----- ; (5)
2па
Ф - магнитный поток обмотки возбуждения.
Из первого уравнения легко определить ток якоря:
U– Ея
Iя=----------;
Rя
В начальный момент пуска двигателя, когда n = 0, в соответствии с уравнением Ея = СеФn = 0, ток якоря в режиме пуска равен:
Uя
Iяп =------ ,
Rя
и т.к. сопротивление якорной цепи мало, ток Iяп может достигать опасной для двигателя величины, поэтому силовые двигатели постоянного тока запускают либо с помощью пускового реостата, либо с помощьюрегулятора который ограничивает пусковой ток до безопасного значения (обычно до (2,5...3)Iян). И только по мере разгона двигателя, сопровождаемого увеличением Ея, сопротивление пускового реостата уменьшается до 0.В этом случае пусковой ток определяется так:
U
Iяп =------- ; (6)
Rя + Rп
Для обеспечения по возможности быстрого пуска при ограниченном токе якоря, ток возбуждения при пуске делают максимальным ( для увеличения потока Ф и, следовательно, увеличения Ея),
полностью выводя регулировочный реостат в цепи возбуждения двигателя.
Из выражения для электромагнитного момента следует, что для изменения направления вращения двигатель можно использовать:
1)изменить направление тока якоря, не изменяя направление тока возбуждения;
2)изменить направление тока возбуждения, не изменяя направление тока якоря.
Основные характеристики двигателя - механическая, регулировочная и рабочие.
Механическая характеристика двигателя постоянного тока независимого возбуждения:
Уравнение механической характеристики:
U (Rя + Rд)M n=---- _ - ---------_= n 0 - ▲ n (7)
Се ФСеСмФ2
Здесь n0 – частота вращения ротора при идеальном холостом ходу (m=0)
▲n – изменение частоты вращения под воздействием момента.
РнМн = 9,55------------ ; (8)
nн
U
n0 =----- ; (9)
СеФ
Из уравнения механической характеристики следует, что регулировать частоту вращения ДПТ можно изменением подводимого напряжения, изменением тока возбуждения и изменением величины добавочного сопротивления в цепи якоря.
Семейства механических характеристик при использовании перечисленных способов регулирования оборотов показаны на рис.1а,б,в.
n n n
Uя3 Ф3 Rq3
Uя2 Ф2 Rq2
Uя1 Ф1
Rq1
M M M
Uя3>Uя2>Uя1 Ф3<Ф2<Ф1 Rq3<Rq2<Rq1
(а) (б) (В)
рис. 1 (а,б,в)
Регулирование оборотов уменьшением величины добавочного сопротивления является наиболее простым способом, но имеет ряд недостатков ограничивающих его применение.
1. Способ не экономичен из-за больших тепловых потерь в добавочном сопротивлении включенном последовательно в цепь якоря.
2. Регулирование оборотов при малых значениях момента, а тем более на холостом ходу (м=0) практически невозможно (см. рис 1в)
Регулирование частоты вращения изменением магнитного потока двигателя (т.е. изменением Iв) значительно лучше так как требует сравнительно маломощного регулятора установленного в цепь обмотки возбуждения, но тоже имеет недостатки связанные со сложностью значительного увеличения магнитного потока (из-за насыщения магнитной системы машины).
Уменьшение магнитного потока достигается легко, но оно обеспечивает регулирование оборотов только для n>nн .
Кроме того, недостатком способа является изменение жесткости механической характеристики при изменении магнитного потока (рис 1б)
Регулирование оборотов изменением напряжения Uя используется наиболее часто потому, как позволяет регулировать обороты ниже номинальных. Недостатком способа является необходимость регулирования полной мощности двигателя.
Регулировочные свойства двигателя обычно характеризуются регулировочной характеристикой п0 = f(IB) либо Iя = f(Iв) при U= Uhи постоянной нагрузке на валу двигателя , в частности в режиме холостого хода.
Мощность Р1 потребляемую двигателем электрической энергии из сети вычисляют по формуле:
P1 = Uя(Iя+Iв) (10)
Мощность Р2 на валу двигателя определяют методом нагрузочного генератора, соединенного с исследуемым двигателем муфтой.
Измеряя мощность генератора
Ро = UoIo, (11)
работающего при напряжении Uoи токе Iо, и зная его к. п. д. для различных нагрузок, т.е. зависимость ц(Ро), находят мощность на валу двигателя так:
vunivere.ru
34. Характеристика дпт с параллельным возбуждением.
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение Uн=const.

Рис. 1 — Схема двигателя параллельного возбуждения
Ток, потребляемый двигателем из сети, определяется суммой I=Ia+Iв, ток возбуждения обычно равен Iв=(0,03...0,04) Iн. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения rв=const и якоря
Σr = const.
Скоростная характеристика.
Зависимость n=f (Ia) при Uн=const и Iв=const
Из уравнения ЭДС для электродвигателя
имеем
Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока Ia уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На рис. 2 показаны три разные скоростные характеристики двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния Ia∑r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.
Рис. 2 — Характеристики двигателя параллельного возбуждения
Ввиду того, что в реальных двигателях изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря.
Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, является характеристика вида кривой 1.
Наклон характеристики определяется величиной сопротивления цепи якоря Σr без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно , где no — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений Rрг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными.
Моментная характеристика – это зависимость М=f (Ia) при rв=const, U=Uн и Σr=const. В установившемся режиме работы двигателя согласно
имеем Mэм = M2+M0 = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (Ia) снимается при U=Uн, rв=const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Рн , достигает максимального значения при Р=(0,5...0,75) Рн, а затем до Р=Рностается почти неизменным. Обычно в двигателях малой мощности η=0,75...0,85, а в двигателях средней и большой мощности η=0,85...0,94.
Механическая характеристика представляет зависимость n=f (M) при U=Uн, Iв=const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
Определив ток Iа из выражения М = сеIaФ и подставив это значение тока в выражение выше, получим
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления Rрг включенного в цепь якоря. При Rрг=0 характеристика называется естественной.
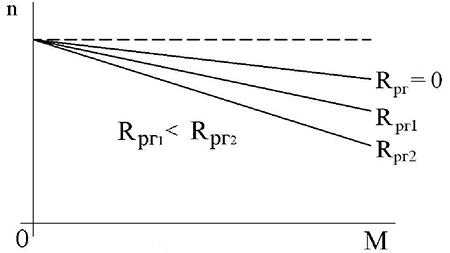
Рис. 3 — Механические характеристики двигателя параллельного возбуждения
Следует помнить, что при обрыве цепи возбуждения Iв=0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.
studfiles.net








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






