Принцип работы инкрементного и абсолютного энкодера. Энкодер механический принцип действия
Энкодеры. Виды и работа. Особенности и применение
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия
Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится. Поэтому он и называется абсолютным. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Далее он переходит снова на ноль.
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
Таблица 1Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
Таблица 2Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
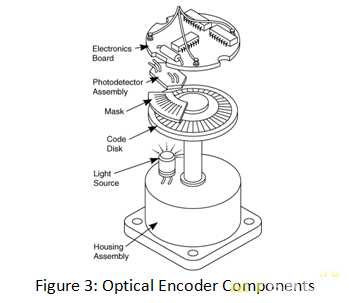
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные. Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Похожие темы:
electrosam.ru
Что такое абсолютный и инкрементальный энкодер, как работают энкодеры
О чем эта статья
В статье вы узнаете, что такое энкодер, какие он может измерять величины. Узнаете что такое инкрементальный и абсолютный энкодер. Познакомитесь с классификацией по принципу действия. А также узнаете на какие характеристики энкодеров нужно обращать внимание при выборе. Напоследок, небольшой список производителей. Вы также можете посмотреть другие статьи. Например, «Датчики измерения давления» или «Относительная влажность воздуха».
Что такое энкодер
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер - это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Инкрементальный энкодер - это устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Используется для определения скорости вращения вала (оси), когда нет нужды сохранять абсолютное угловое положение при выключении питания. То есть, если вал неподвижен, передача импульсов прекращается. Другими словами, если включить энкодер этого типа, то отсчет поворота угла начнется с нуля, а не с угла на который он был выставлен до момента выключения. Оси объекта и энкодера соединяются между собой с помощью специальной гибкой переходной муфты или жесткой втулки, либо энкодер может помещаться собственно на сам вал. Основным преимуществом инкрементальных энкодеров является их простота, надежность и относительно низкая стоимость.
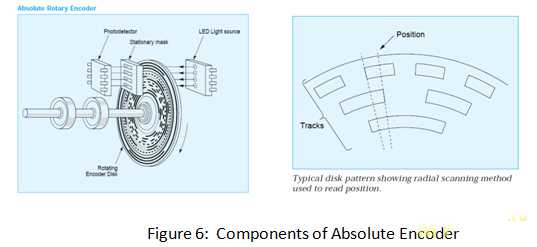
Абсолютный энкодер
Абсолютный энкодер выдает цифровой код, различный для каждого положения объекта, позволяет определять угол поворота оси даже в случае исчезновения и восстановления питания и не требует возвращения объекта в начальное положение, что является несомненным преимуществом этого типа энкодеров. Так как угол поворота всегда известен, то счетчик импульсов в этом случае не нужен. Сигнал абсолютного энкодера не подвергается помехам и вибрации и тем самым для него не нужна точная установка вала. Абсолютный энкодер используется в высокоточных системах: робототехника, станки с числовым программным управлением и др.
Классификация по принципу действия
По принципу действия различают:
- энкодеры оптические
- магнитные
- магниторезисторные
Оптические
Рис. Схема оптического энкодера.
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитные
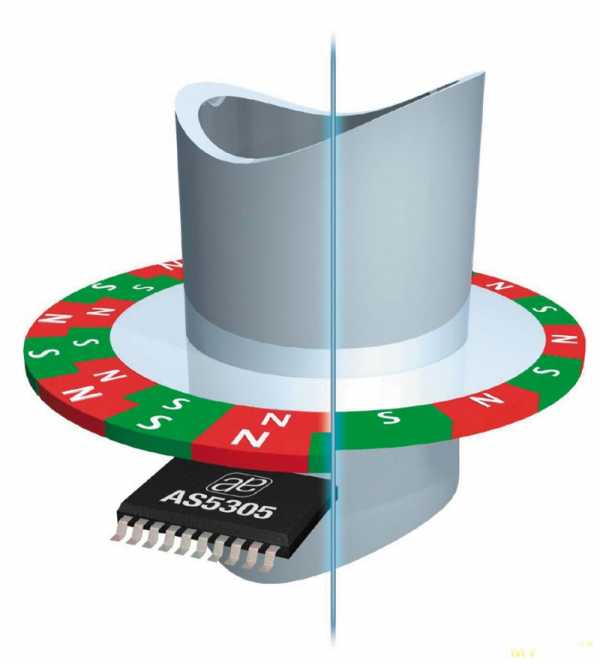
Рис. Схема магнитного энкодера.
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезисторные
Рис. Схема магниторезистивного энкодера.
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
- Число импульсов на оборот (число бит у абсолютных энкодеров). От данного показателя зависит точность системы — чем больше импульсов тем выше точность.
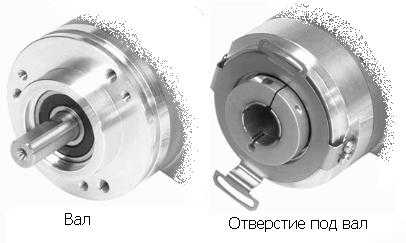 Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.- Тип выходного сигнала энкодера (HTL, TTL, RS422, двоичный код, код Грея, и др.). Данный параметр влияет на снятие сигнала энкодера и дальнейшую его передачу..
- Напряжение питания. От этого показателя зависит работа системы и точность снятия сигнала.
- Длина кабеля или тип разъема влияют на возможности установки рабочей системы.
- Другие требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.). Данный параметр влияет на устойчивость установки и тем самым на точность системы.
- Важна также степень защиты энкодера от проникновения пыли и влаги.
Производители
На российском рынке основными производителями энкодеров являются предприятия Екатеринбурга, а именно - ЗАО «Сенсор», НПП «Уралметаллургавтоматика», ЗАО «Уралчерметавтоматика». Кроме этого, выделяют НПК "ТЕКО" (г. Челябинск), СКБ ИС (г. Санкт-Петербург), Меандр (г. Санкт-Петербург), СТРАУС (г. Тольятти), Мега-К (г. Калуга) и др.
Опубликована 16-10-11.
Если вам понравилась статья нажмите на одну из кнопок нижеwww.devicesearch.ru.com
Оптический энкодер или шутка производителя
Рано или поздно в жизни каждого самоделкина возникает потребность в покупке чего-то такого этакого, что обычно само в голову не придет. Вот и я жил себе спокойно и об энкодерах даже не задумывался.Хотя должен признаться опыт работы с энкодерами имел. Как-то в одной и поделок использовал энкодер из принтера.
В данной истории все приключилось внезапно. Ползая по своим хоббийным форумам натолкнулся на конкурс. Сайт (называть не буду, т.к. разговор не о нем) проводил видимо раскрутку посещаемости и плюс один из форумчан проводил раскрутку своих российского производства изделий. И разыгрывался комплект из 3 наборов для самостоятельной сборки сервоконтроллеров. Я зарегистрировался на этом форуме, подал заявку (вместе с 3 или 4-мя всего лишь участниками) и… выиграл.
Так я стал обладателем 3-х наборов для сборки сервоконтроллеров. Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят.
Есть 2 основных способа управлять точным перемещением в изделиях с ЧПУ (числовое программное управление). Попробую объяснить максимально доступным языком, без сложных схем и терминов. Первый способ это шаговые двигатели. Шаговый двигатель имеет сложное устройство — несколько катушек, притягивающих сердечник в заданных положениях.
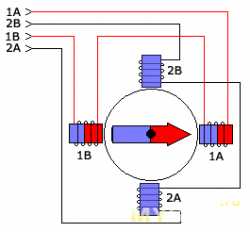
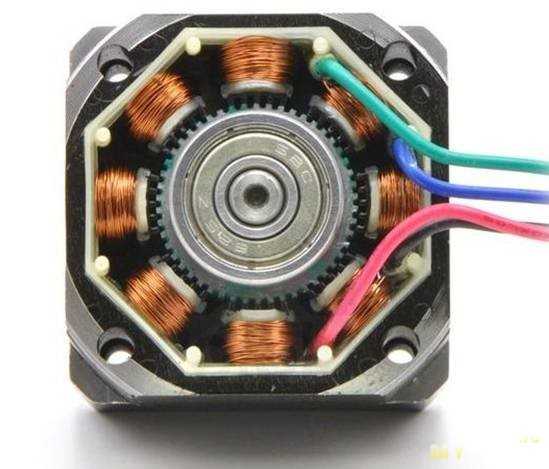
Количество положений, в которых может быть зафиксирован сердечник называется шагами, промежуточные положения (регулируются различными промежуточными напряжениями и соответственно магнитными полями) называют микрошагами. Управляет шаговым двигателем драйвер — это плата управления, как правило с микропереключателями шагов и регулировкой тока, протекающего через двигатель. На вход драйвера подаются сигналы: Enable (разрешить работу шагового двигателя), DIR (направление вращения), STEP (количество шагов, на которое двигателю необходимо повернуть вал). И драйвер переводит команды в обороты вала двигателя. Очень простая и надежная конструкция. Из минусов — скорость вращения двигателя ограничена из-за его конструктива, и если двигатель пропустит по той или иной причине шаги, то управляющая программа об этом не узнает. Отсюда и область применения — низко и среднескоростные двигатели в заданной области нагрузок. Например 3Д принтер или хоббийные станки.
Второй способ управлять перемещениями — сервомотор. Мотор сам по себе может быть любым, постоянного или переменного тока, без разницы. Единственное условие, его вал должен иметь энкодер. Энкодер — это устройство определения позиции вала в данный момент времени. Об энкодерах мы поговорим подробнее чуть позже. Сервоконтроллер имеет другой принцип работы, в отличии от драйвера шагового двигателя. Сервоконтроллер получает на входе те же самые сигналы Enable, STEP, DIR и подает на двигатель напряжение. Двигатель начинает вращаться в нужном направлении, энкодер возвращает данные о положении вала двигателя. Как нужное положение достигается, вал двигателя в нем фиксируется. Конечно это сильно упрощено, т.к. есть ускорение и торможение двигателя, управление током и напряжением, пропорционально-интегрально-дифференцирующий (ПИД) регулятор в контуре обратной связи,… но мы же договорились в этот раз не сильно лезть в теорию.

Какие же плюсы серводвигателей: любая скорость вращения, отсутствие пропуска шагов, бесшумность (шаговый двигатель ощутимо громок в работе из-за своего конструктива). Но цена сервоконтроллеров выше и существенно драйверов шаговых двигателей. Поэтому основная ниша сервоконтроллеров — профессиональное применение.
Для своего проекта я выбрал двигатели Динамо Сливен. Эти двигатели широко использовались в советское время в ЭВМ и их было какое-то нереально большое количество. Кажется, что практически любой хоббийщик или имеет такой двигатель или сталкивался с ним. На барахолках их до сих пор перепродают. Это двигатели постоянного тока с фантастическим неубиваемым ресурсом и устойчивостью к любым издевательствам.

В качестве сервоконтроллера я использовал выигранную плату. Она представляет собой развитие open source сервоконтроллера, известного под устойчивым брендом «сервоконтроллер Чена» — по имени китайца, году так в 2004-м, если не ошибаюсь, предложившим данную схему.

Теперь уже практически переходим сути обзора — к энкодерам. Выбор энкодера был осуществлен по характеристикам и цене. Какие бывают типы энкодеров. В основном это оптические и магнитные. Магнитные — когда на краях диска закреплены магниты, а возле них находится датчик Холла.
Решение дорогое, промышленное, обладает повышенной надежностью. Цена не хоббийная ни разу.
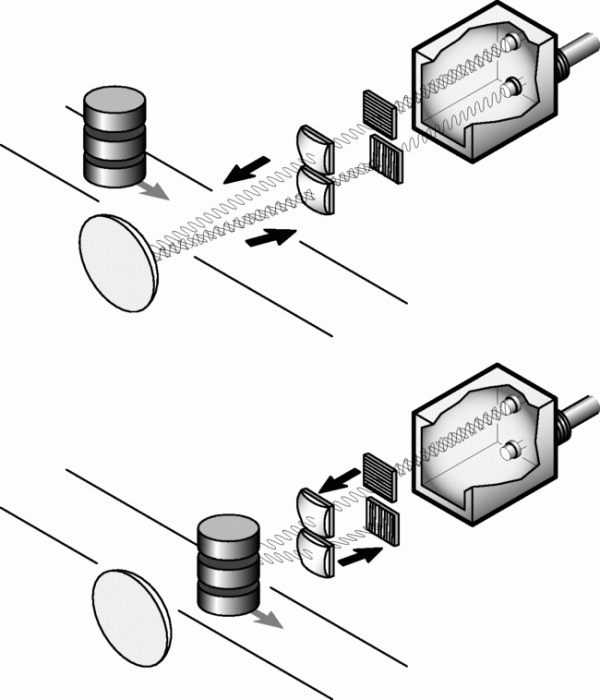
Оптические энкодеры. Самое распространенное решение. Есть в каждой мышке. Раньше отвечали за вращение шарика и колесика. Теперь шариков уже нет, а вот колесики остались. Принцип работы прост — прерывание светового пучка проходящим непрозрачным телом.

Оптические энкодеры есть 2-х типов: инкрементальные и абсолютные. Инкрементальные делятся на 2 подтипа. Простейшие инкрементальные — такие как изображены на рисунке выше. Они определяют пересечение светового потока и на их основе можно построить, например, тахометр. Недостаток данного энкодера состоит в том, что при помощи него невозможно определить направление вращения диска. Инкрементальные 2-х канальные решают задачу определения направления вращения диска.
Для этого используется не один фотодиод, а несколько, обычно 4. Они формируют 2 независимых канала передачи данных, и сравнивая сигналы с этих каналов можно однозначно сделать вывод о направлении вращения диска.
Какие же недостатки есть у данного инкрементального энкодера? Недостаток один, но для ряда применений он критичный. При инициализации энкодера мы не знаем в каком положении находится диск. Т.е. мы можем узнать только направление и скорость вращения диска.
Для получения полной информации, а именно — начальное положение диска, направление и скорость вращения используются абсолютные энкодеры.
Абсолютные энкодеры используют диск со сложной системой кодировки положения. Наиболее распространен код Грея — двоичная кодировка с защитой от ошибок.
Я остановил свой выбор на инкрементальном энкодере с контролем направления вращения, т.е. с двумя квадратурными каналами вывода информации. Разрешения в 100 линий на оборот диска мне было за глаза. Поэтому на Алиэкспрессе я нашел энкодеры за разумную цену и с нужными мне характеристиками.
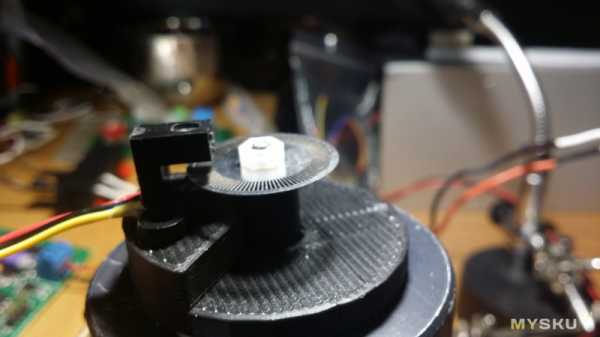
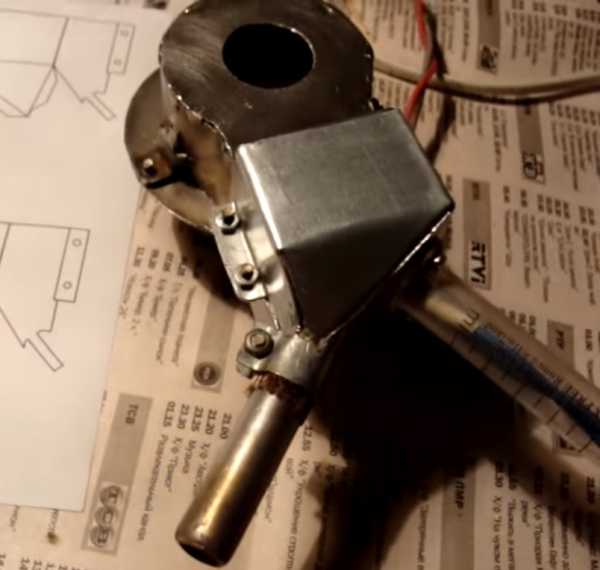
Вот фотка 3-х пришедших мне энкодеров. Дошли они недели за 3.

У энкодеров 4 вывода, Красный — питание 5В, Черный — земля, Цветные — каналы А и В. Я быстренько выточил втулочку на вал двигателя под крепление диска, ввинтил туда стержень с резьбой.

На 3Д принтере распечатал площадку под крепление датчика энкодера

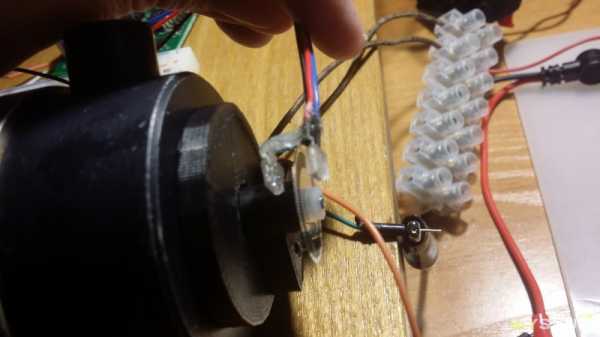
Собрал все вместе
Подключил сервоконтроллер, и… тут бы был счастливый конец обзору, но нет. Ничего не заработало. Даже близко ничего не заработало.
Подключил осциллограф и понял, что никаких квадратурных сигналов на выходе нет, только шумы, наводки и непонятные выплески. Грешил я на все на свете. И на требовательность к позиционированию, и на засветку, и на наводки электромагнитные. И часами аккуратно возюкал датчик в разных положениях, выключал свет и пытался проделать все тоже самое в темное. «Крокодил не ловится, не растет кокос.» Разумеется я перепробовал все 3 энкодера. Везде тоже самое. И тут меня дернуло поразглядывать датчик в микроскоп.

То что я увидел повергло меня в изумление. Все 4 сенсора стояли в ряд по радиусу диска, т.е. засвечивались через прорезь диска одновременно. Разумеется ничего не работало. Датчики должны стоять перпендикулярно радиусу диска, и засвечиваться последовательно разными фронтами прорези диска. Я не мог поверить, что это так просто и так глупо. Китайцы поставили датчик с поворотом на 90 градусов. Я спросил на форуме у такого же как я покупателя таких же энкодеров как у него стоит датчик. И у него все было также неправильно и не работало.
Почесав в затылке я решил попробовать это дело исправить. Энкодер разобрался легко, при помощи фена расплавил термоклей и достал внутренности.

Поднес датчик к диску так чтобы сенсоры был поперек рисок. Конечно датчик корректно не встал, но на осциллографе начал появляться какой-то осмысленный сигнал.
Дальше разрезал корпус энкодера сбоку, наростил проводочками расстояние между светодиодом и матрицей сенсоров и засунул все в корпус по-новому.
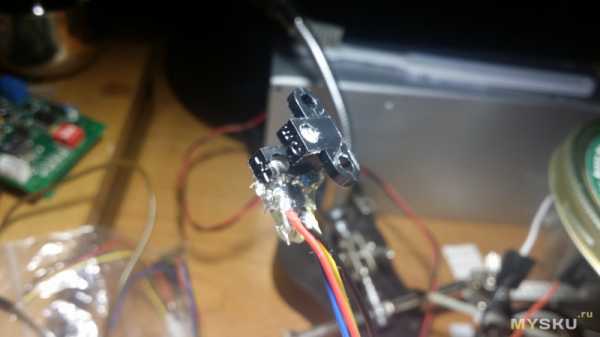
На фото видно, что сенсоры стали перпендикулярно радиусу диска.
Собрал, подключил к сервоконтроллеру и… Бинго, все заработало! Мотор встал в режим удержания позиции. Т.е. при попытке проворота вала двигателя, мотор упирается и если его все же провернуть, то возвращается в исходное положение.

Ну а дальше двигатель займет свое место на фрезерном станке, но это уже совсем другая история...:-)
Как резюме. Энкодер из коробки не работает. К покупке не рекомендую. Но в своей ценовой категории, если он был бы исправным, это хорошее бюджетное решение. Либо если переделка изделия в работающее не пугает, то можно брать и переделывать.
У продавца куча положительных отзывов на такой энкодер. Либо это все липа, либо, что вероятнее, брак пошел массово совсем недавно.
Я написал продавцу, он пока шлет мне тонну технических описаний и предлагает попробовать еще, и намекает, что это я не разобрался. Буду на него давить. Пусть хоть часть денег вернет. Я столько времени угрохал из-за их заводского разгильдяйства.
Всем добра и удовольствия от хобби!
mysku.ru
Появление новых интерфейсов энкодеров способно существенно облегчить жизнь проектировщику?
Энкодеры – это датчики положения, которые используются в промышленных электроприводах для получения информации о скорости вращения электродвигателя и о положении вала ротора. С помощью энкодера реализуется обратная связь по скорости или положению электрической машины, которая заводится в систему автоматического управления и используется в алгоритме управления механизмом. Данная связь является костяком системы автоматизированного электропривода.
Много различных интерфейсов связи разрабатывалось для энкодеров на протяжении последних лет. Но выбор интерфейса связи ставит перед разработчиком ряд факторов – экономическая эффективность, точность, безопасность. Решения, описанные в этой статье, пытаются максимально оптимизировать удовлетворение этих требований.
Принцип работы энкодера
Энкодер – это электромеханическое устройство, которое генерируют выходной электрический сигнал пропорциональный скорости вращения вала электрической или механической машины. Существуют линейные и вращающиеся энкодеры. Данная статья рассматривает вращающиеся энкодеры, используемые в связке с электродвигателями. Датчик крепится к валу электрической машины и генерирует электрические сигналы, которые пропорциональны скорости вращения электродвигателя. Энкодер также можно использовать и для определения положения вала машины в пространстве.
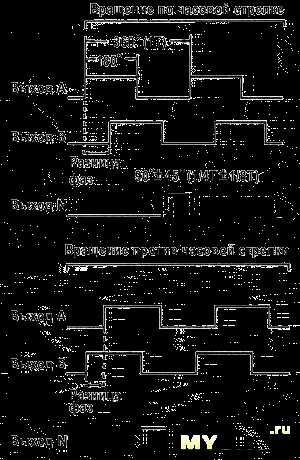
Вращающиеся датчики положения бывают двух видов: инкрементальный и абсолютный. Инкрементальные энкодеры обеспечивают импульсный выход в виде прямоугольных импульсов, которые используются для указания скорости вращения вала, а также могут быть использованы для расчета его положения. Большинство энкодеров генерируют две прямоугольные волны, сдвинутые друг относительно друга на 900. Этот сдвиг позволяет определить направление вращения вала. Более того, маркер или индекс обычно генерируется один за оборот, что позволяет создать контрольную точку при подсчете импульсов.
Абсолютные энкодеры параллельно генерируют на выходе двоичный код, который указывает точное положение в один оборот вала. Использование двоичного кода Грея сводит к минимуму ошибки в определении положения. Также абсолютные датчики положения могут вырабатывать сигналы прямоугольной, синусной или косинусной аналоговой формы. Выработанные sin/cos сигналы обеспечивают более точное определение положения.
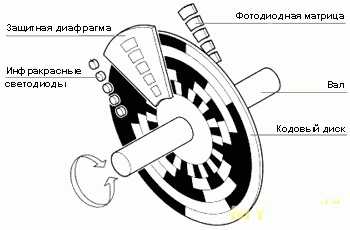
Вращающиеся энкодеры могут генерировать выходной сигнал несколькими способами: механическим, емкостным, магнитным или оптическим методом. Наиболее распространёнными являются оптические датчики положения, так как они генерируют наиболее точный сигнал. Состоит он из стеклянного диска, на который наносят непрозрачные полоски. На данный диск направлен светодиод, который его освещает, и фотодиод или фототранзистор, принимающий и обрабатывающий световой сигнал светодиода. При вращении пара свето- и фотодиод генерируют импульсы, частота которых пропорциональна скорости вращения вала машины. Эти сигналы преобразуются в последовательный формат для передачи в микроконтроллер, который осуществляет управление механизмом.
Интерфейсы абсолютного энкодера
Ряд последовательных интерфейсов доступен для абсолютных датчиков положения. Большинство из них являются собственностью компаний занимающихся производством энкодеров. На рынке укрепилось несколько наиболее популярных видов интерфейсов, таких как: BiSS, EnDat, HIPERFACE и SSI. Давайте подробней рассмотрим каждый из них.
BiSS
Двунаправленный синхронный последовательный интерфейс (BiSS) был разработан IC-Haus, Германия. Интерфейс использует соединение точка-точка от датчика к контроллеру. Шесть проводных линий находятся в экранированном кабеле: одна дифференциальная пара для тактового сигнала и вторая дифференциальная пара для последовательных данных кодера.
Данные передаются синхронно с тактовым сигналом. Тактовая частота определяется длиной кабеля, который может быть от 10 до 1000 метров. Максимальная тактовая частота составляет 10 Мбит / с на 10 метров. Доступна компенсация задержки для кабеля большой длины.
Интерфейс BiSS, соответствует стандарту TIA / EIA RS-422 и имеет два дополнительных провода источника питания постоянного тока к кодеру. Он аппаратно-совместимым с интерфейсом SSI, который описан ниже.
EnDat
Протокол кодировщик данных является собственностью Heidenhain, Германия. Он реализует соединение точка-точка с восемью проводами. Одна дифференциальная пара для данных, вторая пара для часов, остальные четыре провода используются для питания датчика. Передача данных происходит синхронно с тактовыми импульсами и с тактовой частотой, зависящей от длины кабеля. Максимальная скорость составляет 16 Мбит / с, в то время как типичная скорость на 100 метров составляет 8 Мбит / с. Он использует стандарт интерфейса TIA / EIA RS-485.
HIPERFACE
HIPERFACE DSL (Digital Servo Link) был разработан Max Stegmann GmbH, Германия и SICK, США. Последовательный интерфейс точка-точка использует стандарт в TIA / EIA RS-485. Тем не менее, этот протокол также поддерживает подключение шины из нескольких кодеров.
Интерфейс использует восьмижильный экранированный кабель типа витая пара длиной до 150 метров. Одна дифференциальная пара используется для данных, две пары несут аналоговые сигналы sin / cos, сгенерированные кодером. Sin/cos сигналы оцифровываются 12-разрядными АЦП и используются для обеспечения измерения положения с более высоким разрешением. Две дополнительные линии питают энкодер.
Передача данных производится в асинхронном режиме. В стандартной версии, интерфейс поддерживает скорость передачи данных 38,4 кбод. Другой вариант HIPERFACE может передавать 9,375 Мбод до 100 метров.
Ключевой особенностью этого интерфейса является то, что он может нести сигналы обратной связи в одном кабеле, что исключает необходимость дополнительного кабель. Это делается путем наложения сигналов данных обратной связи на сигнал питания постоянного тока.
SSI
Один из самых старых и оригинальных интерфейсов энкодера представляющий собой синхронный последовательный интерфейс, разработанный в Европе. Он предшествует всем интерфейсам, описанным выше. SSI использует шестижильный кабель с одной парой для данных, одной парой для таймера, и одной парой питания постоянным током. Скорость передачи данных может составлять до 1,5 Мбит / с. Некоторые SSI энкодеры поставляются с sin / cos сигналами над другими двумя парами.
Реализация интерфейса
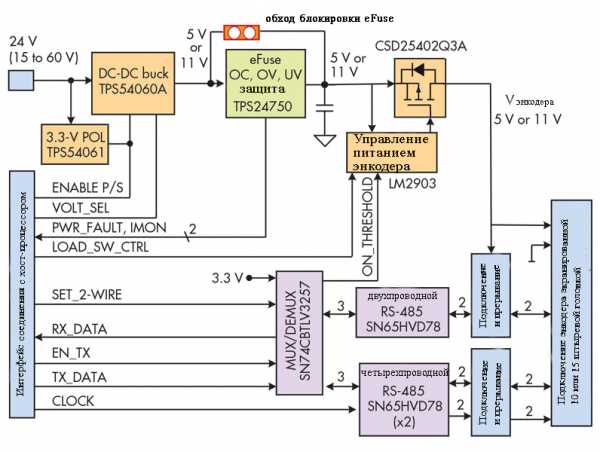
Как разработчик вы можете создать свой собственный интерфейс, основанный на удобных для вас интегральных микросхемах ИС. Однако в случае если у вас нет желания или времени разрабатывать свой собственный интерфейс, для быстрого и простого подключения энкодера вполне подойдет один из интерфейсов компании Texas Instruments. Одним из таких решений является TIDA-00179, который является универсальным интерфейсом и может быть использован с любым из описанных выше интерфейсов.
На первом рисунке показана схема данной системы. Конструкция поддерживает стандартные напряжения питания постоянным током от 15 В до 60 В (как правило, 24 В). Встроенные компоненты питания предназначаются для питания датчика положения напряжениями 5,25 В или 11 В. Также предусмотрена защита от перенапряжений, пониженного напряжения, перегрузки по току и короткого замыкания. Приемопередатчики RS-485 передают и обрабатывают данные, поступающие от датчика вращения. Данная конструкция способна поддерживать вариант исполнения с длиной кабеля до 100 метров.
Другим доступным вариантом является TIDA-00202 для HIPERFACE энкодеров. Подобно Tida-0179, он обеспечивает питания датчика 11 В от номинального входного напряжения 24 В. Также включен приемопередатчик RS-485 для передачи данных. Поддерживается аналоговый выход sin/cos сигнала.
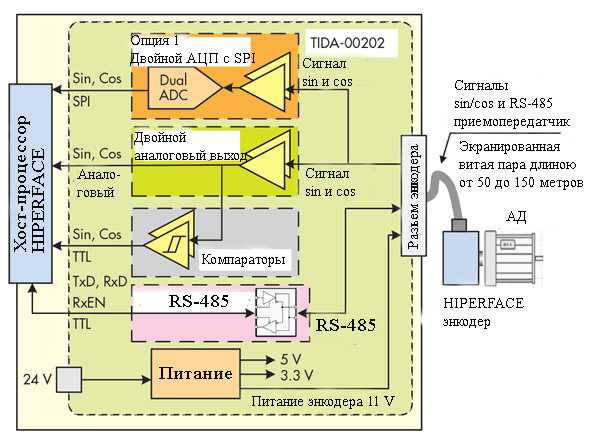
Выходной сигнал обрабатывается тремя путями: один путь это аналоговый сигнал, второй преобразует сигнал в совместимый вариант с транзисторно-транзисторной логикой ТТЛ, третий путь – это оцифровка сигнала двумя 12-битными АЦП в интерфейс SPI с последующей передачей на обработку микроконтроллеру. Данная конструкция поддерживает длины кабелей от 50 до 150 метров. Разновидность этой конструкции является TIDA-00176, который является только интерфейсом для sin / cos энкодеров.
elenergi.ru
Энкодер - это... Инкрементальный энкодер
Слово «энкодер» имеет англоязычное происхождение. Оно возникло от слова encode, что значит «преобразовывать». Наиболее известными мировыми производителями данных приборов являются такие известные бренды как Siemens, СКБ ИС, HEIDENHAIN RLS, Baumer, SICK AG, Balluff, Schneider electric (Autonics Telemecanique), OMRON.
Сфера и цель применения
Энкодер – это датчик, применяемый в промышленной области с целью преобразования подконтрольной величины в электрический сигнал. При помощи него определяется, например, положение вала электрического двигателя. В связи с тем что каждое устройство, в котором применяется вращение, обязательно должно быть оснащено прибором, контролирующим точность вращательного момента, популярными сферами использования подобных преобразователей являются системы точного перемещения. Основная цель, с которой применяется энкодер, – это измерение угла поворота объекта во время вращения. Энкодеры незаменимы в процессе производства на станкостроительных предприятиях, в работотехнических комплексах. Используют их также во многих современных измерительных приборах, которые нуждаются в регистрации высокоточных измерений углов, вращения, поворотов и наклонов.
Ранжирование энкодеров
Все ныне известные энкодеры подразделяются на абсолютные и инкрементальные, резисторные, магнитные и оптические, работающие через промышленные сети либо шинный интерфейс.
В зависимости от общего принципа работы выделяют абсолютные энкодеры и инкрементальные. Различие между этими двумя видами заключается в выполняемых ними задачах. Перечень задач абсолютного энкодера гораздо шире перечня, который охватывается энкодером инкрементальным.
Инкрементальные энкодеры
Это импульсный датчик. В процессе поворота объекта на его выходах фиксируются импульсы, количество которых прямо пропорционально углу вращения предмета. Обычно инкрементальные преобразователи применяют в процессе станкостроения с целью регистрации углового перемещения вала или в автоматизированных системах в цепи обратной связи для измерения и регистрации скорости поворота вала.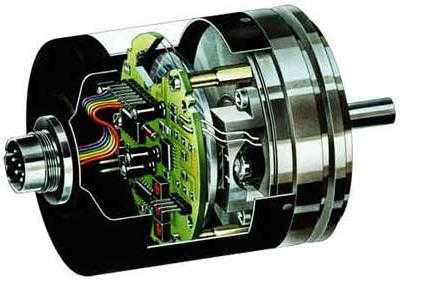
Инкрементальный энкодер - это устройство, функционирующее на основе данных импульсов, образующихся при вращении. Количество импульсов на единицу оборота – это и есть основной рабочий параметр данного устройства. Текущее значение определяется датчиком по методу подсчета количества импульсов от точки отсчета. С целью привязки систем отсчета на импульсном энкодере устанавливаются референтные метки, которые являются стартовыми после включения оборудования. Определение данных при помощи инкрементального преобразователя возможно лишь во время вращения или поворота. При остановке вращения все данные энкодера обнуляются. В итоге при последующем включении предыдущие данные счетчика будут неизвестны. Для удобства его эксплуатации следует привести вал в исходное положение. Инкрементальный энкодер идеально справляется с задачей измерения скорости поворота. При помощи подсчета количества импульсов от референтной метки можно с точностью определить также текущую координату угла вращения объекта.
Абсолютные энкодеры
Так называют абсолютный датчик положения. Обычно в подобных энкодерах наблюдаются более сложные процессы электронной обработки сигналов и имеется оптическая схема. Но зато они выдают реквизиты объекта сразу после включения, что зачастую является обязательным для корректного функционирования системы в целом. По сравнению с инкрементальными использование абсолютных энкодеров позволяет решать значительно более широкий круг задач, так как измерения производятся не при помощи фиксации импульсов, а специальными цифровыми кодами. Единица измерения подобного аппарата – это число уникальных цифровых кодов за единицу вращения (1 оборот).  В связи с тем, что все цифровые коды, выдаваемые датчиком, уникальны, определить текущую координату линейного перемещения сразу же после включения прибора не составляет труда и без использования реферетной метки. В момент включения на выходах датчика появляется код из цифр. Он и является обозначением текущего положения угла поворота объекта. Таким образом, абсолютный энкодер отлично справляется не только с задачей отслеживания скорости поворота (вращения) объекта, но и выдает корректные данные о его точном расположении в данный момент времени, независимо от того, подключен он или нет.
В связи с тем, что все цифровые коды, выдаваемые датчиком, уникальны, определить текущую координату линейного перемещения сразу же после включения прибора не составляет труда и без использования реферетной метки. В момент включения на выходах датчика появляется код из цифр. Он и является обозначением текущего положения угла поворота объекта. Таким образом, абсолютный энкодер отлично справляется не только с задачей отслеживания скорости поворота (вращения) объекта, но и выдает корректные данные о его точном расположении в данный момент времени, независимо от того, подключен он или нет.
Разновидности абсолютных энкодеров
В зависимости от особенностей характеристик аюсолютные энкодеры могут различаться типом крепления, наличием несквозного или сквозного, полого или выступающего вала. Ассортимент таких устройств также очень разнообразен с точки зрения внешних характеристик: длины, диаметра корпуса и так далее. Кроме того, известно, что абсолютные датчики измерения положений во время вращения бывают многооборотными и однооборотными. Однооборотные производят определение текущей координаты в пределах 1 оборота, а многооборотные способны к распознанию еще нескольких дополнительных оборотов.
Оптический энкодер - что это?
Данный преобразователь представляет собой жестко закрепленный на валу диск, сделанный из стекла. Энкодер оптический, в отличие от вышеописанных датчиков, дополнительно оборудован оптическим растором, который в процессе поворота вала перемещается и преобразовывает вращательный момент в поток света, принимаемый впоследствии фотодатчиком.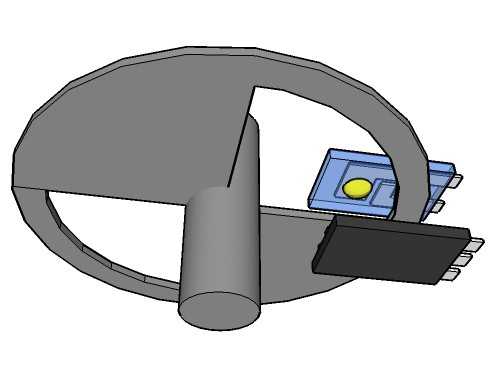
Данный тип преобразователя фиксирует углы вращения, где каждому уникальному положению соответствует специальный неповторимый код из цифр. Он вместе с количеством оборотов и представляет собой единицу измерения датчика. Подключение энкодера и принцип его действия идентичны функционированию инкрементального устройства, описанного выше.
Типы датчиков в зависимости от принципа работы
По характеристикам работы энкодеры делятся на магнитные и фотоэлектрические.
Физический принцип работы первых базируется на применении эффекта Холла, открытого в 1879 году Э. Холлом. В данном случае разность потенциалов возникает лишь при помещении проводника постоянного тока в область магнитного поля.
По характеристикам разрешения и точности магнитный энкодер уступает фотоэлектрическому, но его реализация проще. Он является гораздо менее требовательным к пространствам и условиям функционирования.
Представитель магнитного энкодера представляет собой прибор, фиксирующий цикл прохождения магнитного полюса вращающегося магнита, расположенного поблизости от чувствительного элемента. Выражение данных передатчика также имеет вид цифрового кода.
Фотоэлектрический энкодер – это датчик, функционирующий на базе фотоэлектрического эффекта, который наблюдается в результате воздействия света на вещество. Открыт данный принцип в 1887 году Г. Герцем. В процессе работы датчика данного типа наблюдается постоянное преобразование светового луча в электрический сигнал.
 Синонимом фотоэлектрического энкодера являются оптронный, оптический и оптоэлектронный. Датчики данного типа более требовательны к характеристикам производства, эксплуатации и многому другому, нежели иные энкодеры, но это оправдано, так как потенциал их точности значительно выше, нежели у конкурентов.
Синонимом фотоэлектрического энкодера являются оптронный, оптический и оптоэлектронный. Датчики данного типа более требовательны к характеристикам производства, эксплуатации и многому другому, нежели иные энкодеры, но это оправдано, так как потенциал их точности значительно выше, нежели у конкурентов.
fb.ru
Энкодер - Help for engineer
Энкодер
Энкодер – это так называемый датчик угла поворота, то есть, устройство, которое предназначено чтобы преобразовать угол поворота вала (измеряемого объекта) в электрические импульсы, по которым можно определить: угол поворота, скорость вращения, направление вращения, и текущее положение относительно начальной точки работы.
Датчики угла поворота (далее энкодеры) нашли широкое применение в различных механизмах, в которых необходимо точно знать текущее положение. Такими механизмами могут быть: промышленные манипуляторы, сервоприводы и т.д.

Рисунок 1 - Внешний вид энкодера
Энкодеры имеют разделение на :
– инкрементальные;
– абсолютные.
По характеру исполнения подразделяются на :
– Резисторные;
– Магнитные;
– Оптические.
Инкрементальный энкодер
По своей сути инкрементальный энкодер – это счетчик импульсов, которые возникают при вращении вала. Устанавливают энкодер непосредственно на вал, или соединяют их через гибкую переходную муфту.
Внутри энкодера расположен диск с рисками, где с одной стороны располагается источник света, а с другой - фотоприёмник. При вращении диска изменяется количество света, проходящего через риски диска на фотоприемник, далее сигнал преобразуется и передается на дискретный выход. Необходимо заметить, что выходной сигнал состоит из двух каналов, в которых импульсы имеют сдвиг на 90 градусов относительно друг друга, что позволяет нам определять направление вращения вала. Количество импульсов может быть от нескольких импульсов до десятков тысяч импульсов на один оборот – так называемое «разрешение энкодера». Например, если диск будет иметь 2000 рисок на оборот, то за 1000 импульсов вал повернулся на 180 градусов.
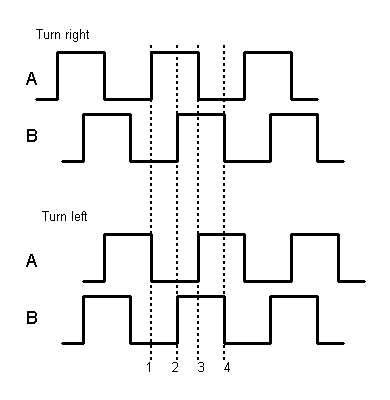
Рисунок 2 - Диаграмма импульсов энкодера смещенных на 90 градусов.
Чтобы привязать отсчет положения относительно начала координат, датчики так же имеют референтную метку (указатель нулевой отметки/импульс, который отвечает за полный оборот). То есть, при каждом обороте вала, на выходе будет еще один импульс начальной (нулевой) позиции. Этот выход обычно используется для сброса внешнего счетчика, который отвечает за текущее положение.
Абсолютный энкодер
Абсолютный энкодер по своему исполнению является оптическим.
В первую очередь они разделяются на однооборотный, в котором текущая координата определяется в рамках одного оборота, и многооборотные.
Абсолютный энкодер можно отнести к отдельному типу энкодеров, отличительной особенностью которых является уникальный код , сформированный для каждой позиции вала. Так же разница от инкрементального энкодера: в данном датчике не нужен счетчик импульсов, потому что мы всегда знаем угол поворота. Выходной сигнал абсолютного энкодера формируется как во время покоя, так и во время вращения вала. Внутренней отличительной особенностью является диск с несколькими концентрическими дорожками, каждой из которых получается уникальный двоичный код для определенной позиции вала. Абсолютный энкодер при потере питания не теряет своего значения, что говорит о том, что нам не нужно возвращение в начальную позицию. Сигнал абсолютного энкодера устойчив к помехам, что говорит о том, что для него не требуется точная установка вала. Данный тип датчиков хорошо устойчив к вибрациям.
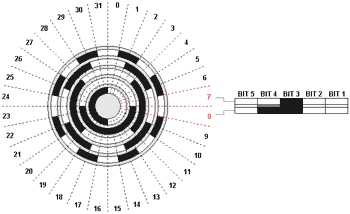
Рисунок 3 - Диск абсолютного энкодера с несколькими дорожками
Наиболее распространёнными выходными сигналами являются: параллельный код, код Грея, интерфейсы Profibus-DP, LWL, DeviceNet, SSI, CANopen, через которые также можно осуществить программирование датчиков.
Магнитный энкодер
Магнитный энкодер улавливает полюса вращающегося магнитного элемента, который находится вблизи чувствительного элемента, преобразуя эти влияния в соответствующий цифровой код.
Добавить комментарий
h4e.ru
Принцип работы абсолютного энкодера
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Я уже писал об терминологии абсолютных энкодоров. Теперь о принципе работы этих сенсоров.
Кодовый диск абсолютного энкодераАбсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный кодДвоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
1x23 + 0x22 + 1x21 + 0x20
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
| числовое значение | двоичный код | |
| 0 | 000 | |
| 1 | 001 | |
| 2 | 010 | |
| 3 | 011 | |
| 4 | 100 | |
| 5 | 101 | |
| 6 | 110 | |
| 7 | 111 | |
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1.Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код ГреяКод Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом » Complement «. Выдаваемое значение может быть возврастающим или спадающим при одном и том же физическом направлении вращения оси.Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 23 22 21 20 | ||
| 0123 | 0 0 0 00 0 0 10 0 1 00 0 1 1 | 0 0 0 00 0 0 10 0 1 10 0 1 0 |
| 4567 | 0 1 0 00 1 0 10 1 1 00 1 1 1 | 0 1 1 00 1 1 10 1 0 10 1 0 0 |
| 891011 | 1 0 0 01 0 0 11 0 1 01 0 1 1 | 1 1 0 01 1 0 11 1 1 11 1 1 0 |
| 12131415 | 1 1 0 01 1 0 11 1 1 01 1 1 1 | 1 0 1 01 0 1 11 0 0 11 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
Примечание:* Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.** Инвертор*** Исключающее или
Gray-Excess-CodeОбычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
Однооборотный энкодерОднооборотными ( Single — Turn ) датчиками называются датчики, которые выдают абсолютное значения в пределах одного оборота, т.е. в радиусе 360°. После одного оборота код является полностью пройденым и начинается опять с его начального значения. Эти датчики служат, преимущественно, для измерения угла поворота и применяются, например, в антенных системах, эксцентричных коленчатых пресах и т.д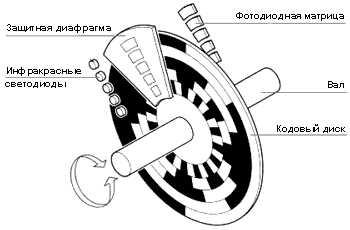
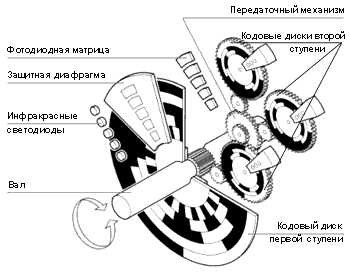
Многооборотный энкодерЛинейные перемещения предполагают необходимым применение измерительной системы с n -количеством оборотов. Например, при линейных приводах или при задачах измерения с помощью зубчатой измерительной штанги, применение однооборотных датчиков является неприемлемым. В этом случае приходят на помощь датчики, где дополнительно к измерению угла поворота в пределах одного оборота также происходит регистрация количества оборотов с помощью дополнительно встроенного передаточного механизма, т.е. своего рода редуктора из нескольких кодовых оптических дисков, образуя, таким образом, многооборотный энкодер ( Multi — Turn ).
Информация предоставлена сайтом www.megasensor.com
avtomatikablog.com





Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






