Индуктивные датчики. Устройство, типы и виды индуктивных датчиков. Индуктивный датчик положения
Принцип действия и основные параметры индуктивных датчиков положения | RuAut
Самым распространенным типом устройств в составе существующих АСУ ТП являются индуктивные датчики положения, их количество превышает 90% от всех применяемых дискретных датчиков положения. Любой технологический процесс в практически любой отрасли промышленности (пищевая, машиностроение, нефтегазовая, энергетика) требует отслеживать положение заслонок, приводов, клапанов, деталей и заготовок, подвижных элементов конструкций агрегатов и т.д. в автоматическом режиме.
Повсеместному распространению индуктивных датчиков послужили их надежность, отличные эксплуатационные характеристики и сравнительно низкая стоимость. Основными рабочими характеристиками индуктивных датчиков положения являются: диапазон срабатывания, степень защиты, рабочая температура и частота отклика.
Принцип действия индуктивных датчиков заключается в следующем. При подаче питания на датчик возбуждается первичная обмотка от переменного напряжения резонатор и тем самым создает вблизи себя электромагнитное поле. При помещении в зону действия электромагнитного поля металлического объекта, который, по сути, становится вторичной обмоткой, начинают наводиться токи вихревого характера, так называемые токи Фуко. Такое явление ведет к ухудшению добротности первичной обмотки, что в свою очередь приводит к изменению в сторону уменьшения амплитуды сигнала резонатора, из-за чего срабатывает компаратор (триггер Шмидта), далее сигнал усиливается посредством усилителя и выдается на выход датчика.
Параметры индуктивных датчиков положения и рекомендации по их применению
Чтобы правильно подобрать индуктивный датчик под определенную задачу необходимо знать ряд основных параметров, а также за какие функции эти параметры отвечают.
Наверное, главным параметром, указанным в паспорте на датчик является номинальный диапазон срабатывания. Он обозначается как Sn. Номинальный диапазон срабатывания, хотя и является основным параметром, но практического значения особо не имеет. Так как его значение получается при ряде ограничений связанных с внешними факторами, а именно: температура окружающей среды 20 градусов Цельсия, питающее напряжение 24 В постоянного или же 230 В переменного тока. А в качестве объекта должна использоваться стальная пластина, выполненная из определенной стали, квадратной формы с шириной в 3 раза больше ширины значения Sn и толщиной 1мм. Практическое же значение имеют такие параметры, как эффективный диапазон срабатывания Sr и полезный диапазон срабатывания Su. Значение Sr варьируется в пределах плюс минус 10% от номинального диапазона срабатывания, а измеряется в температурном диапазоне от 18 до 28 градусов Цельсия и при номинальном напряжении питания. Полезный диапазон срабатывания индуктивного датчика варьируется в пределах плюс минус 10% от эффективного и измеряется при напряжении питания равного 85% - 110% от номинального и температуре от -25 до +70 градусов Цельсия. Часто в техническом описании на датчик можно встретить такой параметр, как гарантированная зона (диапазон) срабатывания. Его нижняя граница равна 0, а верхняя значению 0.81Sn. Также важными параметрами индуктивных датчиков положения, влияющими на точность и достоверность измерений, являются гистерезис и повторяемость H и R соответственно. Гистерезисом называют расстояние между самыми дальними точками срабатывания датчика на объект при приближении и удалении последнего. Нормальным считается значение гистерезиса равное 0.2Sr.
Помимо свойств присущих непосредственно самому индуктивному датчику положения на диапазон срабатывания влияют свойства материала объекта, речь идет об электропроводимости и магнитной проницаемости. Для этого было введено понятие коэффициента редукции. Эталонным материалом считается Сталь 37, ее коэффициент редукции равен 1. Для других металлов коэффициент редукции имеет значение меньше 1. Например, нержавейка имеет коэффициент редукции 0.85, а медь всего лишь 0.3. То есть, если объектом срабатывания является медь, то диапазон срабатывания уменьшается до значения равного 0.3Sn .
Далее описываются другие, но не менее важные параметры индуктивных датчиков положения.
Напряжение питания датчика
Питание индуктивных датчиков может осуществляться как от источников постоянного тока, так и источников переменного тока. Для постоянного тока характерны диапазоны напряжений: 10-30В, 10-60В и 5-60В. Для переменного тока характерен диапазон: 98-253В. Также существуют индуктивные датчики имеющие универсальное питание, такие датчики можно запитать как от источника постоянного, так и от источника переменного тока.
Номинальный ток нагрузки
Параметр показывает, на какое значение тока рассчитан датчик при действии нагрузки продолжительный интервал времени. Стандартным является значение равное 200мА, но бывают спец исполнения датчиков рассчитанные и на 500мА.
Частота отклика
Параметр показывает, с какой максимальной частотой, выраженной в герцах, датчик может осуществлять переключения. Для большинства промышленных применений хватает частоты отклика равной 1000Гц, а вот поднимать частоту выше 5кГц производителям датчиков нет особого смысла, так как такая частота будет выше, частоты выполнения стандартного цикла промышленного контроллера (ПЛК). Тем самым состояние такого датчика может быть неверно интерпретировано модулем ввода ПЛК.
При выборе датчиков также стоит обратить на степень защиты корпуса от брызг и пыли, и диапазон температуры при котором может работать индуктивный датчик. Стандартными являются степень защиты IP67, а температурный диапазон от минус 25 до плюс 70 градусов Цельсия.ruaut.ru
Индуктивный датчик положения и малых линейных перемещений
Индуктивный датчик положения и малых (около 1 мм) линейных перемещений разрабатывался для применения в магнитных подшипниках и магнитных подвесах.
Работа индуктивного датчика положения основана на изменении индукции чувствительного элемента при изменении зазора между ним и ферромагнитным движущимся объектом.
Вариант конструкции чувствительного элемента представлен на рисунке №3.1. На половине ферритового кольца К7х4х2 600НН намотана обмотка из 100 витков провода ПЭВ-2 диаметром 0.05 мм. Торцы сердечника отшлифованы с применением алмазной пасты. Качество их поверхности определяет чувствительность и линейность датчика. Возможно также исполнение датчика в открытом со стороны подвижного ферромагнитного объекта броневом ферритовом сердечнике (внешний диаметр до 10 мм, параметры обмотки те же) с центральным стержнем. Перемещающийся объект, положение которого контролируется с помощью датчика, должен быть ферромагнитным (из материала с высокой магнитной проницаемостью). Возможно нанесение такого материала на движущийся объект в зоне чувствительности датчика.
Конструкция чувствительного элемента индуктивного датчика положения (на полукольце и в броневом сердечнике):
Рисунок 3.1
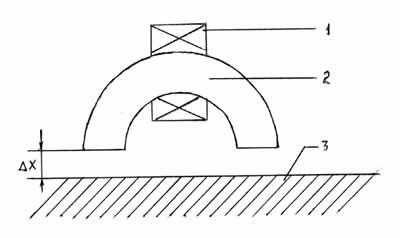
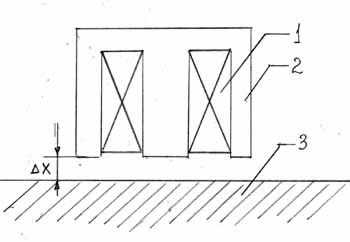
1 - обмотка, 2 - ферритовый сердечник, 3 - ферромагнитное основание (движущийся объект).
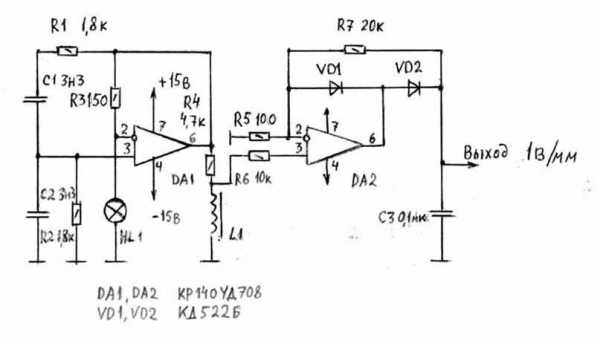
Принципиальная схема индуктивного датчика положения показана на рисунке №3.2. На микросхеме DA1 собран генератор синусоидального сигнала частотой около 20 кГц и амплитудой около 2 В. Частота генератора задается элементами R1C1R2C2. В цепь отрицательной обратной связи для поддержания необходимого коэффициента усиления включена лампа накаливания HL1. Напряжение с генератора через резистор R4 подается на обмотку L1 чувствительного элемента датчика. Напряжение на этой обмотке относительно общего провода зависит от индуктивности чувствительного элемента, которая определяется расстоянием от него до движущегося ферромагнитного объекта. На микросхеме DA2 собран детектор переменного напряжения, снимаемого с обмотки L1, коэффициент усиления которого выбирается из условия получения чувствительности датчика порядка 1 Вольт/миллиметр. Роль фильтрующего элемента выполняет конденсатор C3. Напряжение шумов на выходе датчика не превышает нескольких милливольт.
Схема принципиальная электронного преобразователя
Индуктивного датчика положения и малых линейных перемещений.
Рисунок 3.2
4. Бесконтактные выключатели
к содержанию
Одной из проблем, возникающих при автоматизации систем управления является надежное переключение исполнительных механизмов при достижении ими какого либо перемещения. В настоящее время широкое применение для этих целей нашли следующие типы выключателей:
Рассмотрим их более подробно.
Индуктивные бесконтактные выключатели
Индуктивные бесконтактные выключатели предназначены для контроля положения механизма или отдельных узлов. Они находят широкое применение в станках, кузнечно-прессовом оборудовании, литейных машинах, конвейерах и т.д., во всех отраслях промышленности.
Высокая надежность, независимость срока службы от числа срабатывания, надежная герметизация и возможность применения в неблагоприятных условиях, большое быстродействие, высокая долговечность - все эти преимущества позволяют с успехом заменять контактные путевые переключатели, повышая надежность схем управления различными производственными процессами.
Принцип действия бесконтактного конечного выключателя (ВК) основан на изменении амплитуды колебаний генератора при внесении в активную зону датчика металлического, магнитного, ферро-магнитного или аморфного материала определенных размеров. При подаче питания на конечный выключатель в области его чувствительной поверхности образуется изменяющееся магнитное поле, наводящее во внесенном в зону материале вихревые токи, которые приводят к изменению амплитуды колебаний генератора. В результате вырабатывается аналоговый выходной сигнал, величина которого изменяется от расстояния между датчиком и контролируемым предметом. Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса.
Структурная схема индуктивных бесконтактных выключателей представлена на рисунке №4.1.
studfiles.net
Датчики положения (индуктивный датчик, датчик Холла)
Датчики положения (индуктивный датчик, датчик Холла) |
Для измерения скорости вращения и определения положения различных узлов двигателя используются датчики положения. К ним относятся: датчик положения коленчатого вала (ДПКВ), датчик положения распределительного вала (ДПРВ) или датчик фазы (ДФ), датчик скорости (ДС), датчики ABS. Сигнал ДПКВ используется для определения частоты вращения КВ, а также его мгновенного положения. Т.к. частоты вращения распределительного и коленчатого валов соотносятся как 1:2, то только по сигналу ДПКВ невозможно однозначно определить находится ли поршень двигателя, движущийся к ВМТ, на такте сжатия или выпуска. Фазный датчик на распределительном валу передает эту информацию в блок управления. В качестве примера приведен сигнал с авто ВАЗ.
Сигналы ДПКВ (синий) и ДПРВ (зеленый)
К наиболее распространенным типам этих датчиков относятся: индуктивный (электромагнитный) датчик и датчик Холла. Индуктивный датчик
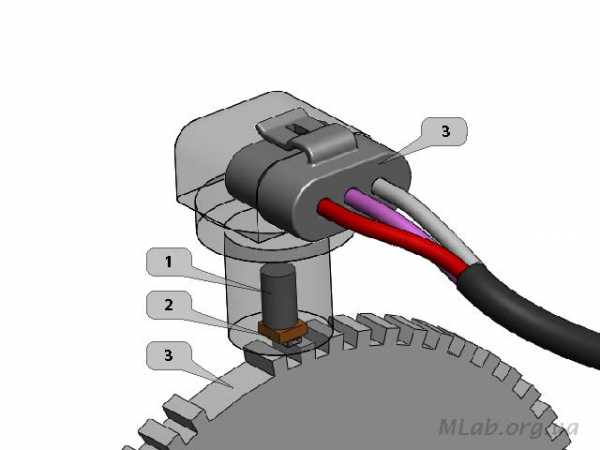
Этот тип датчика наиболее распространен в качестве ДПКВ. Датчик монтируется поблизости от подвижного элемента, называемого маркерным диском. Этот элемент представляет собой стальной диск с зубьями, который жестко зафиксирован на коленчатом валу (может находиться как со стороны ременной передачи, так и непосредственно на маховике КВ).
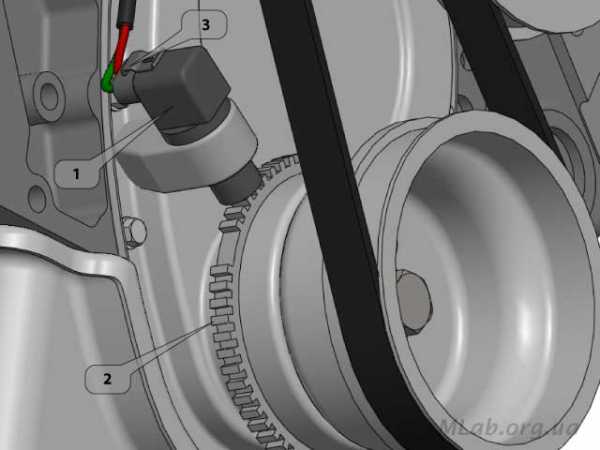 Расположение ДПКВ1. ДПКВ2. Маркерный диск3. Разъем датчика
Расположение ДПКВ1. ДПКВ2. Маркерный диск3. Разъем датчика
Датчик состоит из обмотки с сердечником из постоянного магнита. Когда зуб проходит перед датчиком, это приводит к усилению магнитного потока, проходящего через обмотку. Напротив, увеличение зазора ослабляет этот поток. Происходит изменение магнитного поля, которое вызывает появление индукционного тока в обмотке. Амплитуда напряжения переменного тока сильно возрастает по мере повышения частоты вращения маркерного диска (от нескольких мВ до значений более 100 В).
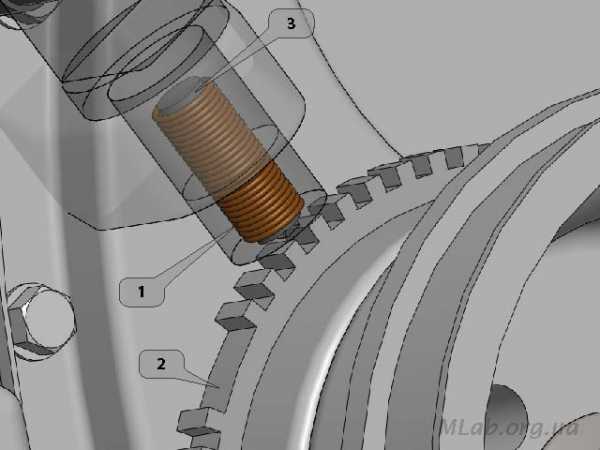 Конструкция индуктивного датчика1. Обмотка2. Метка на маркерном диске в виде пропущенных зубьев3. Постоянный магнит
Конструкция индуктивного датчика1. Обмотка2. Метка на маркерном диске в виде пропущенных зубьев3. Постоянный магнит
Маркерный диск может иметь как пропуски зубьев, так и более широкие зубья.
Кол-во зубьев маркерного диска зависит от его назначения и модели авто. В качестве маркерного диска для КВ наиболее распространенным является диск с 60-ю зубьями, при этом два зуба пропущены. Зазор с пропущенными зубьями предназначен для отметки определенного положения коленчатого вала и служит как установочная метка для синхронизации блока управления. На маркерных дисках системы ABS пропуск зубьев отсутствует, т.к. в данной системе положение колеса не принципиально, имеет значение только скорость вращения.
Пример сигнала индуктивного датчика ABS
В варианте исполнения для ДПРВ, маркерный диск может иметь всего один зуб, т.к. в данном случае нет необходимости измерять скорость вращения, нужно определить только положение РВ для определения фазы работы двигателя.
Для дальнейшего анализа электронный блок производит преобразование аналогового сигнала в цифровой. Амплитуда напряжения сигнала пропорциональна скорости прохождения подвижной детали перед датчиком. Напряжение также в значительной степени зависит от расстояния между вершинами зубьев и поверхностью датчика, как правило, зазор составляет 1±0,5 мм. Подсчитывая число импульсов в течение заданного промежутка времени, электронный блок может определить скорость вращения КВ. Индуктивный датчик подключается к контроллеру экранированной парой проводов с заземлением экранирующей оплетки на кузов автомобиля.
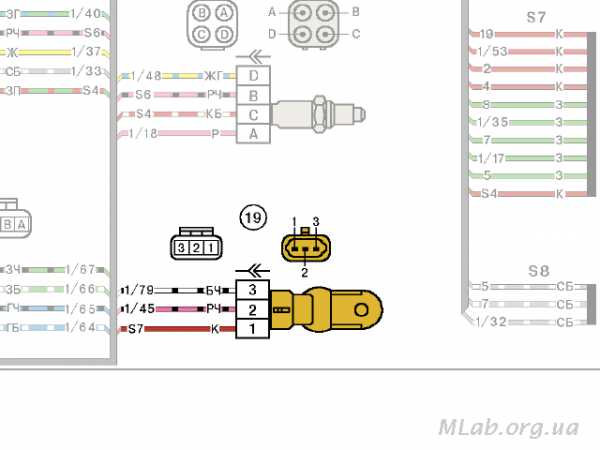
 Пример схемы подключения ДПКВ
Пример схемы подключения ДПКВ
Для записи осциллограммы индуктивного датчика, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему со стороны ЭБУ.
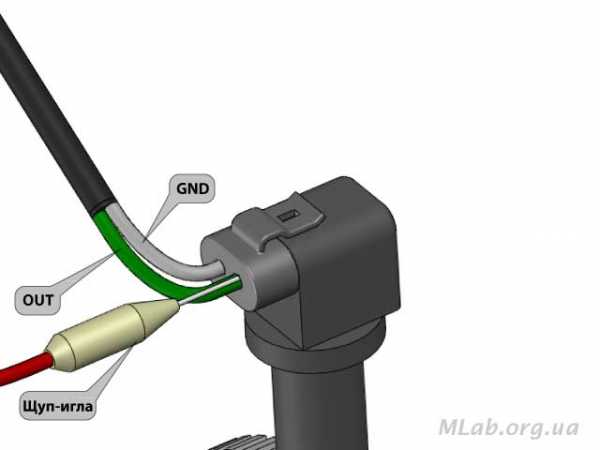 Подключение мотор-тестера к ДПКВ (цветовая маркировка проводов указана в качестве примера)
Подключение мотор-тестера к ДПКВ (цветовая маркировка проводов указана в качестве примера)
Датчик Холла
В таких датчиках использован эффект Холла. Интегральная схема датчика Холла располагается между маркерным диском и постоянным магнитом. Когда зуб маркерного диска проходит у элемента датчика, то он изменяет величину магнитного поля, пронизывающего элемент Холла. За счет этого возникает сигнал напряжения, который находится в милливольтновом диапазоне и не зависит от относительной скорости между датчиком и маркерным диском. Оценивающая электронная схема, встроенная в интегральную схему, вырабатывает сигнал в форме прямоугольных импульсов.
 Датчик Холла
1.
Постоянный магнит
2.
Интегральная схема Холла.
3.
Маркерный диск
4.
Разъем датчика
Датчик Холла
1.
Постоянный магнит
2.
Интегральная схема Холла.
3.
Маркерный диск
4.
Разъем датчика
Как правило, датчик Холла имеет три вывода: питание +5В (+12В), «земля», сигнальный выход.
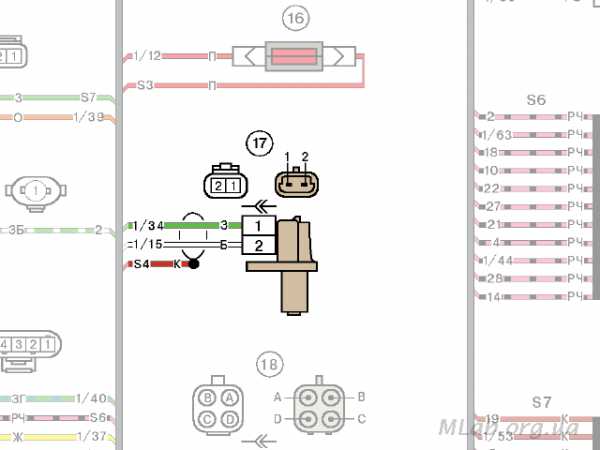
 Пример схемы подключения ДПРВ
Пример схемы подключения ДПРВ
Для записи осциллограммы датчика Холла, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему ЭБУ.
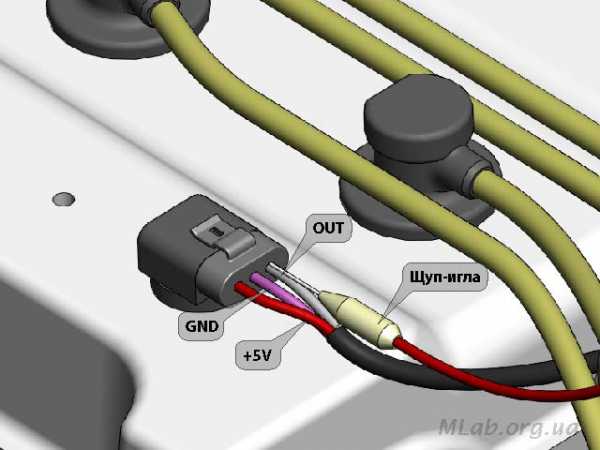 Подключение мотор-тестера к ДПРВ (цветовая маркировка проводов указана в качестве примера)
Для записи сигнала ДПКВ рекомендуется использовать 2ой аналоговый канал мотор-тестера, для сигнала ДПРВ - 3ий канал. При наличии нескольких ДПРВ, можно использовать любой свободный аналоговый канал.
Подключение мотор-тестера к ДПРВ (цветовая маркировка проводов указана в качестве примера)
Для записи сигнала ДПКВ рекомендуется использовать 2ой аналоговый канал мотор-тестера, для сигнала ДПРВ - 3ий канал. При наличии нескольких ДПРВ, можно использовать любой свободный аналоговый канал.
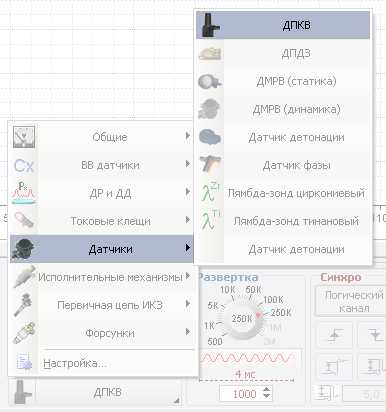 Настройка аналогового канала для индуктивного датчика
Настройка аналогового канала для индуктивного датчика
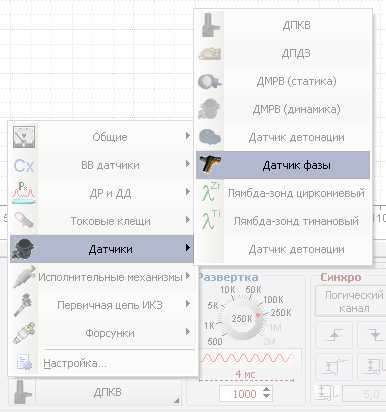 Настройка аналогового канала для датчика Холла
Настройка аналогового канала для датчика Холла
Дополнительные возможности ПО:Автоподстройка линейки по любому «стандартному ДПКВ» (тема на форуме)
Одновременный анализ сигналов ДПКВ и ДПРВ позволяет проверить работу этих датчиков, а также правильность установки КВ и РВ (соответствие меток ГРМ).
автор: Евгений Куришко
www.mlab.org.ua
Принцип работы индуктивных датчиков перемещения
Предлагаем Вам ознакомиться с физическими основами работы индуктивных датчиков перемещения производства компании RDP Electronics Ltd (United Kingdom), с их основными параметрами, преимуществами и сферами применения.
Сам термин LVDT (Linear Variable Differential Transformer) - означает линейный дифференциальный трансформатор с переменным коэффициентом передачи.
Рассмотрим принцип работы датчиков на LVDT технологии.
Первичная возбуждающая обмоткаВторичная обмотка 1Вторичная обмотка 2Результирующий сигнал от суммы вторичных обмоток
В принципе имеется две схемы работы — с выходным напряжением и выходным током.
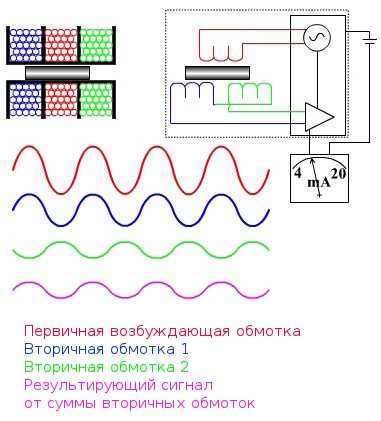 Схема работы с выходным током (4-20мА) Схема работы с выходным током (4-20мА) |
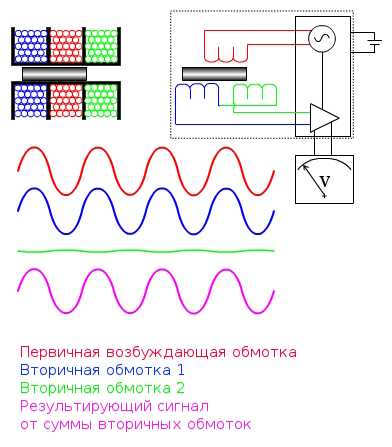 Схема работы с выходным напряжением Схема работы с выходным напряжением |
Рассмотрим более детально сам процесс измерения перемещения.
Датчик перемещения, работающий по технологии LVDT, состоит из трех обмоток трансформатора — одной первичной и двух вторичных. Степень передачи тока между первичной и двумя вторичными обмотками определяется положением подвижного магнитного сердечника, штока. Вторичные обмотки трансформатора соединены в противофазе.
При нахождении штока в середине трансформатора, напряжение на двух вторичных обмотках равны по амплитуде, а т. к. они соединены противофазно, суммарное напряжение на выходе равно нулю — перемещения нет.
Если шток перемещается от серединного положения в какую либо сторону — происходит увеличение напряжения в одной из вторичных обмоток и уменьшение в другой. В результате суммарное напряжение будет не нулевым — датчик будет фиксировать смещение штока.
Соотношение выходной фазы сигнала по сравнению с фазой возбуждающего сигнала дает возможность электронике понять, в какой части обмотки находится в данный момент шток.
Основная особенность принципа работы индуктивных датчиков перемещения состоит в том, что прямой электрический контакт между чувствительным элементом и трансформатором отсутствует (связь осуществляется через магнитное поле), что дает пользователям абсолютные данные по перемещению, теоретически бесконечную точность разрешения и очень долгий срок службы датчика.
Особенности схемы работы с выходным током — т. к. цепь генератор/демодулятор встроена в сам датчик перемещения и питается от выходного тока 4-20 мА, то нет необходимости во внешнем оборудовании для формирования сигнала.
Особенности схемы работы с выходным напряжением — цепь генератор/демодулятор, встроенная в датчик перемещения обеспечивает возбуждение и преобразует сигнал обратной связи в напряжение постоянного тока. При этом так же не требуется внешнее оборудование для формирования сигнала.
Особенности измерения выходного сигнала. 1) Если выходное напряжение измеряется не фазочувствительным (среднеквадратичным) вольтметром, то отклонение штока в любую сторону от центрального положения в трансформаторе датчика будет соответствовать увеличению выходного напряжения.

Заметим, что кривая не касается горизонтальной оси. Это происходит из-за остаточного выходного напряжения.
2) Если используется фазочувствительная демодуляция, то по выходному сигналу можно судить, в какой части трансформатора находится шток в данный момент.

Для формирования сигнала всегда используется фазочувствительная демодуляция, т.к. это исключает влияние на выходной сигнал остаточного выходного напряжения и позволяет пользователю знать положение штока в трансформаторе.
Диапазон линейности индуктивного датчика перемещения. Если мы рассмотрим выходную кривую вне механического диапазона типичного LVDT датчика, то можно заметить, что на краях диапазона кривая изгибается. Это значит, что механический диапазон существенно шире линейного участка работы.
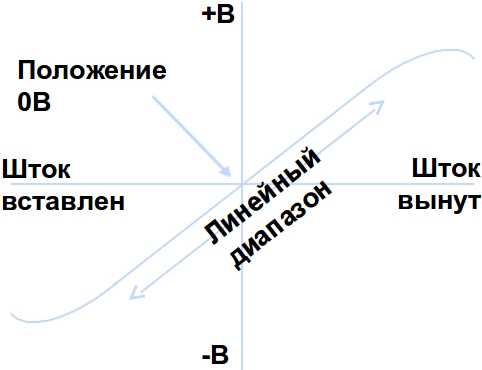
При калибровке датчика, важно, что электрическая нулевая точка используется в качестве ссылки, и что датчик используется в пределах ± FS (полного диапазона) вокруг электрического нулевом положения.
Если проводить калибровку не беря за основу точку ноля вольт, одно из положений полного диапазона будет за пределами линейного диапазона и, следовательно, может привести к ошибке линейности.
Типы индуктивных датчиков перемещения
Тип 1 - несвязанные преобразователи, которые имеют якорь, который отделен от тела корпуса. Части датчика должны быть установлены таким образом, что якорь не прикасался к внутренней трубке корпуса. Сделав это, можно получить абсолютное отсутствие трения при движении чувствительного элемента датчика.
Тип 2 - монолитные преобразователи, которые имеют тефлоновый подшипник, который направляет якорь (шток) по внутренней трубке.
Тип 3 - монолитные преобразователи с возвратной пружиной, которая толкает якорь (шток) наружу.
Внутреннее строение типичного индуктивного датчика перемещения LVDT

Преимущества индуктивных датчиков перемещения LVDT
1. Преимущества над линейными потенциометрами (POTS).
- Не имеют контакта корпуса и внутренних деталей с чувствительным элементом, что означает, что нет никакого износа при движении штока. POTS датчики имеют контакт с чувствительным элементом и могут быстро изнашиваются, особенно под воздействием вибрации.
- Можно легко обеспечить защиту от влаги и пыли на требуемом уровне, даже стандартные версии LVDT датчиков обычно имеют гораздо лучший уровень защиты от внешний воздействий, чем POTS.
- Вибрация не вызывает влияния на пропадание сигнала, в отличие от POTS, где скользящий бегунок может прервать контакт с проводником при вибрации.
2. Преимущества над магнитострикционными датчиками.
- Не восприимчивы к ударам и вибрации.
- Менее восприимчивы к паразитным магнитным полям окружающей среды.
- Система формирования сигнала может быть удалена от чувствительного элемента на некоторое расстояние, что позволяет использовать датчики при работе с высокой температурой и высоким уровнем радиации.
- Магнитострикционные датчики не имеют короткого штока ±100мм или менее, а это как раз наиболее востребованный диапазон технического применения датчиков перемещения.
3. Преимущества над кодерами (датчиками положения).
- Имеют лучший аналоговый частотный отклик.
- Имеют более прочный корпус.
- Сразу после включения «знают» положение штока, в отличии от кодеров, которым надо указывать постоянную ссылку на известное положение.
4. Преимущества над переменными векторными резистивными преобразователями (VRVT)
- LVDT датчики как правило более дешевы.
- Имеют меньший диаметр корпуса.
- Более прочные и не изнашиваются.
- Могут использоваться значительно дольше.
5. Преимущества над линейными емкостными датчиками
- LVDT датчики как правило более дешевы.
- Менее восприимчивы к внешним условиям эксплуатации.
- Значительно более прочные.
Особенности индуктивных датчиков перемещения LVDT
- Максимальная рабочая температура 600°C.
- Минимальная рабочая температура –220°C (для справки, температура жидкого азота -196°C, температура жидкого гелия -269°С).
- Могут работать при уровне радиации 100,000 рад.
- Могут работать при давлении 200Бар.
- Могут работать под водой, при этом вода может попадать внутрь датчика не причиняя ему вреда. Существует специальная серия подводных датчиков, которые могут без тех. осмотра работать под водов в течении 10-ти лет, работать под водой на глубине до 2,2км. Кабельные разъемы могут подсоединяться так же под водой.
Основные сферы применения LVDT датчиков
Промышленные измерительные системы
- Регулирующие вентили — везде, где существуют регулирующие вентили индуктивные датчики перемещения могут быть использованы для контроля положения штока вентиля. Особенно, где есть ответственные участки работы, например, в клапанах пара для турбин на электростанциях.
- Контроль положения шлюзов - погружные датчики перемещения подходят для измерения положения шлюзов в водохозяйственных и канализационных системах.
- Измерение зазора между валками. Для поддержания равномерной толщины проката зазор между валками часто измеряется на обоих концах.
- Контроль перемещения штоков вентилей на подводных нефте/газо проводах.
- Контроль работы гидравлических активаторов — измерение перемещения объекта, который передвигает активатор. Благодаря очен высокой износостойкости, данные LVDT датчики перемещения могут выдерживать миллионы циклов перемещения.
- Контроль положения/перемещения режущих инструментов, отрезающих рулонные материалы.
- Измеряет положение/смещение роликов, которые используется для выпрямления полосового проката перед штамповкой.
- Могут быть использованы для динамического измерения размеров (диаметров) рулонов продукта, например, инициировать сигнал к системе управления, когда рулон достигает максимального/минимального размера при наматывании/сматывании материала.
Станки
- Могут быть использованы в испытательных приспособлениях для измерения круглости, плоскостности и т.д. частей машин для анализа качества их изготовления.
- Могут быть использованы для оценки и контроля взаимного расположения компонентов деталей в сборке, когда требуется юстировка/подгонка размеров взаимного расположения деталей.
Авиация/космонавтика
- Могут быть использованы для оценки реакции привода на действие активатора. Например, преобразователь измеряет положение отклонения закрылков крыла самолета при техническом обслуживании. Тут очень важно измерить скорость срабатывания активатора после подачи на него управляющего сигнала, а так же скорость изменения положения закрылков.
- Анализ Ротора вертолета Датчики LVDT используются на вертолетах, чтобы измерить угол наклона лопастей ротора.
- Могут быть использованы для оценки смещения корпуса двигателя при нагревании.
- Могут быть использованы для измерения смещения (деформации) лопасти турбины при внешнем воздействии.
- Могут быть использованы для измерения отклонения диафрагмы сопла реактивного двигателя.
- Могут быть использованы для испытания крыльев самолетов для измерения их отклонения при нагрузке.
Строительство / Проектирование зданий и сооружений
- Могут быть использованы для измерения вибрации или деформации мостов при изменении трафика движения или порывов ветра.
- Могут быть использованы для измерения смещения грунта при строительстве, контроля оползней и насыпных дамб.
- Могут быть использованы при испытании крупногабаритных строительных конструкций, балок, пролетов моста и т. д. на силовую деформацию.
Автомобилестроение
- Могут быть использованы для контроля смещения корпуса двигателя при его испытаниях.
- Идеальным применением LVDT датчиков может быть тестирование компонентов подвески автотранспорта.
- Могут быть использованы для контроля изготовления прецизионных компонентов.
- Могут быть использованы для настройки компонентов двигателя, таких как дизельные форсунки.
- Могут быть использованы для тестирования сидений, дверей, педалей и ручек транспортных средств для моделирования продления их срока службы.
- Могут быть использованы для измерения профиля поверхности заготовки, например стекла или других площадных объектов.
Выработка энергии
- Могут быть использованы для измерения биения вала турбины.
- Могут быть использованы для контроля положения главного парового клапана, который регулирует поток пара в турбину. Клапан постоянно корректирует свое положения для поддержания постоянной скорости вращения турбины. LVDT датчики идеально подходят для работы в зоне высоких температур, грязи и постоянной вибрации.
- Могут быть использованы для контроля положения перепускного клапана. Когда откроется перепускной клапан, датчик может испытать температуру 200°C.
www.ndt-td.ru
Бесконтактные датчики положения механизмов | Онлайн журнал электрика
Более всераспространены бесконтактные датчики положенияпоследующих типов: индуктивные, генераторные, магнитогерконовые и фотоэлектронные. Обозначенные датчики не имеют механического контакта с подвижнымобъектом, положение которого контролируется.
Бесконтактные датчики положения обеспечивают высочайшее быстродействие и огромную частоту включений механизма.Определенным недочетом этих датчиков является зависимость, их точности от конфигурации напряжения питания итемпературы. Зависимо от требований выходным аппаратом этих устройств может быть как бесконтактны логический элемент, так и электронное реле.
В схемах четкой остановки электроприводов бесконтактные датчики могут употребляться как для подачи команды на переход к пониженной частоте вращения, так и для конечной остановки.
Индуктивные датчики положения ИКВ-22
Индуктивные датчики ИКВ-22. Работа этих датчиков базирована на принципе конфигурации индуктивного сопротивления катушек со железным сердечником при изменении зазора в магнитной цепи.
На металлической плите 1 установлен магнитопровод 2 с 2-мя катушками 3, закрытый пластмассовой крышкой 4. С нижней стороны к плите крепятся два конденсатора 5 типа МБГП (один емкостью 15 мкФ, 200 В, 2-ой —10 мкФ, 400 В). Конденсаторы закрыты крышкой 6. Подключение кабеля делается через сальниковый ввод 7. На механизме устанавливается магнитный шунт 8, размеры которого должны быть более: толщина 2 мм, ширина 80 мм, длина 140 мм. Зазор меж магнитопроводоми шунтом равен 6±4 мм.
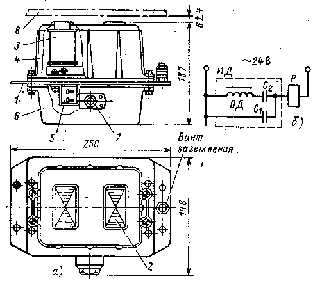
Схема включения индуктивного датчика ИД и выходного реле
Выходное реле нормально включено и отключается в момент прохождениймагнитного шунта над датчиком, когда из-за конфигурации индуктивного сопротивления катушки наступает резонанс токов и ток через обмотку реле падает. Данные реле Р: тип МКУ-48, 12 В переменного тока, ток втягивания менее 0,45 А, ток отпадания более 0,1 А. Напряжение питания цепи датчик — реле 24 В переменного тока.
Схема четкой остановки устройств с внедрением индуктивных датчиковположения
Индуктивные датчики положения ИД-5
В металлургических цехах употребляют индуктивные датчики типа ИД-5, рассчитанные для работы при температуре среды до +80 °С и влажности до 100%. Допустимо присутствие токопроводящейпыли и окалины. В комплекте с датчиком используют выходной полупроводниковыйусилитель типа УИД-10. Выходная мощность усилителя (25 Вт) достаточна длявключения обширно всераспространенных реле РЭВ-800, контакторов КП21, МК-1 и т. д.
Зазор меж датчиком и контролируемым ферромагнитным объектом может достигать 30 мм. Размеры датчика ИД-5 187х170х70 мм, напряжение питания 220 В± ±15%, 50 Гц.
Бесконтактные компактные путные тумблеры БСП
На металлорежущих станках находят применение компактные путныетумблеры БСП-2 (с бесконтактным выходом, на логический элемент) и БРП (с выходомна реле ПЭ-21, 24 В, 16 Ом).
Тумблер БСП-2 состоит из дифференциально-трансформаторного датчика и полупроводникового триггера. Магнитная система первой катушки датчика зашунтирована металлической пластинкой, а 2-ая катушка шунтируется при перемещении над ее магнитной системой связанного с механизмом плоского якоря. Катушки включены встречно.
Если якорь находится над датчиком, индуктивные сопротивления катушек равны и выходной сигнал дифференциально-трансформаторного датчика равен нулю. При всем этом на выходе триггера возникает напряжение более 2,5 В, достаточное для срабатывания логического элемента.
При отсутствии якоря над датчиком на триггер подается напряжение,возвращающее его в начальное состояние. Выходной сигнал тумблера при всем этомравен нулю.
Принцип деяния тумблера БРП почти во всем аналогичен БСП-2. Снутри корпуса смонтированы индуктивный датчик (по схеме дифференциального трансформатора), триггер и усилитель. Вторичные катушки, имеющие различное число витков, включены встречно. По мере перекрытия якорем магнитной системы датчика сигнал миниатюризируется, а после конфигурации его фазы переключается триггер и срабатывает наружное выходное реле (ПЭ-21, 24 В, 16 Ом).
Якорь, закрепленный на механизме, имеет размеры 80х15х3 мм. Зазор меж якорем и датчиком 4 мм. Точность выключателей в номинальном режиме составляет ±0,5 мм, дифференциал срабатывания — менее 5 мм. При. колебаниях напряжения питания и температуры погрешность тумблеров БСП-2 и БРП может достигать ± (2,5-f-3,0) мм.
Высокочастотные индуктивные датчики ВКБ
Для автоматизации металлорежущих станков употребляют также высокоточные индуктивные датчики типа ВКБ с П-образным либо плоским якорем. Полюсы встроенного трансформатора образуют разомкнутую электрическую систему. Рабочий зазор равен 0,1—0,15 мм.
Выходное напряжение с вторичной обмотки трансформатора подается на дифференциальную измерительную схему, а потомна транзисторный усилитель. Суммарная погрешность датчика’ при колебаниях температуры от 5 до 40 °С и напряжения от 85 до 110% номинального значения составляет ±(0,064-0,15) мм, дифференциал срабатывания не превосходит 0,4 мм. Наибольшая скорость движения механизма равна 10 м/мм. Размеры датчика 62х34х24 мм.. Напряжение питания 12 В.
Особые типы станочных прецизионных индуктивных датчиков с дифференциальной схемой имеют погрешность наименее ±0,01 мм. К таким датчикам относится путной бесконтактный выключатель типа ВПБ12, состоящий из блока датчика электрического блока. В блокдатчика входят индуктивный рабочий датчик, индуктивный компенсационный датчик и печатные платы. На механизме устанавливается: управляющий ферритовый элемент. Напряжение питания 12 В неизменноготока. Наибольшее расстояние воздействия — менее 0,12 мм. На выходедатчика могут быть включено реле типа РПУ-0. Наибольший ток нагрузки выходногоаппарата 0,16 А.
Генераторные датчики положения
Датчики этого типа отличаются компактностью и высочайшей точностью. Отлично зарекомендовали себя генераторные датчики серий КВД-6М и КВД-25 (щелевые), КВП-8 и КВП-16 (плоскостные). Они применимы для использования при завышенной концентрации воды и пыли. В корпусе из ударопрочного полистирола расположены элементы транзисторной схемы датчика (генератор и триггер). Герметизация выполнена компаундом прохладного отвердения. Интервал рабочих температур — от— 30 до +50 °С.
Датчик КВД выдает сигнал дискретной формы, когда через щель проходит железная пластинка («флажок»), вызывающая срыв генерации и переключение триггера. Ширина щели равна 6 мм у датчика КВД-6М и 25 мм у датчика КВД-25.
Датчики КВП-8 и КВП-16 срабатывают при прохождении мимо их железной пластинки на наивысшем расстоянии соответственно 8 и 16 мм.
Cхемы подключения логических частей и выходных реле кдатчику КВД-6М:а — при напряжении питания 12 В; б — при напряжении питания 24 В.Большая (практически энциклопедическая)
статья про датчики
Сильно много принципиального и полезного содержит справочникэлектрика
А скачать журнальчикЯ электрик можно тут
elektrica.info
Индуктивные датчики. Устройство, типы и виды индуктивных датчиков.
Индуктивные датчики применяются для преобразования в электрический сигнал небольших линейных и угловых перемещений. Простейший индуктивный датчик (называемый однотактным) представляет собой катушку индуктивности 1 с железным сердечником 2 и подвижным якорем З, отделенным от сердечника воздушным зазором (рис. 2-4). Катушка индуктивности с сердечником, называемая статором датчика, закрепляется неподвижно, а якорь соединяется механически с подвижной частью ОУ, перемещение которой нужно преобразовывать в электрический сигнал. При перемещении якоря изменяется сопротивление магнитной цепи датчика вследствие изменения воздушного зазора δ между статором и якорем (при вертикальном движении якоря) или площади воздушного зазора S (при горизонтальном движении якоря).
Сопротивление магнитной цепи датчика складывается из сопротивления участка цепи со сталью Rст и сопротивления участка цепи с воздушным зазором Rв. Магнитное сопротивление участка цепи со сталью:
Rст = Lст/(mст/Sст),
где Lст - суммарная длина средней магнитной силовой линии в стали сердечника и якоря; Sст — площадь поперечного сечения стального сердечника; mст — магнитная проницаемость материала сердечника и якоря.
Магнитное сопротивление участка цепи с воздушным зазором:
Rст = 2δ/(μоSв), где δ — длина воздушного зазора между статором и якорем датчика; μо - проницаемость воздуха; Sв - площадь поперечного сечения воздушного зазора. Так как μо>>μо, то Rст0 . сопротивление магнитной цепи датчика будет определяться в основном сопротивлением участка цепи с воздушным зазором:
Rм ≈ Rв = 2δ/(;μоSr)Переменный магнитный поток Ф, возникающий при подключении источника питания к катушке датчика, равен
Ф = Iω/Rм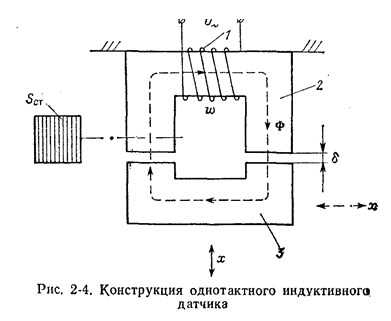
где I - ТОК в цепи катушки датчика; w - число витков катушки датчика,w - число витков катушки датчика.
Индуктивность катушки датчика (если пренебречь потоком рассеяния):
L = ωФ/I = [ω2/2δ]μS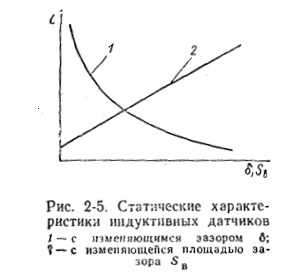
Формула (2-1) устанавливает функциональную связь между перемещением якоря индуктивного датчика (при перемещении изменяется или d, или Sв) и индуктивностью катушки датчика.
У индуктивных датчиков с изменяющимся воздушным зазором статическая характеристика L=f(x) нелинейная (рис. 2-5, 1) и при больших зазорах (δ > 1 мм) чувствительность датчика уменьшается. Такие датчики используют при ограниченном диапазоне перемещения якоря - до 1 мм, а начальная рабочая точка выбирается в области характеристики, где она имеет наибольшую крутизну и приближается к линейной чувствительность датчиков с изменяющимся воздушным зазором высокая – до 0,2 мкм.
У индуктивных датчиков с изменяющейся площадью воздушного зазора статическая характеристика L=f(Sв) линейная, диапазон перемещения якоря шире — до 8 мм, но чувствительность меньше - до 0,3 мкм (рис. 2-5, 2). Изменение индуктивности катушки датчика L приводит к изменению ее индуктивного сопротивления: ХL = ωL, где ω - круговая частота питающего напряжения. Следовательно, происходит и изменение полного сопротивления катушки: Z = √Rа*2+XL*2, где Ra - активное сопротивление катушки датчика.
Ток I, протекающий в катушке датчика под действием приложенного переменного напряжения U, также изменяется при перемещении якоря и может служить выходным сигналом датчика (выходной характеристикой). Условно принцип работы индуктивных датчиков можно представить в виде цепи преобразований происходящих при перемещении якоря датчика (для датчиков с изменяющимся воздушным зазором):
x↑ → δ↑ → Rm↑ → Ф↓ → L↓ → Xl↓ → Z↓ → I↑Однотактные индуктивные датчики имеют высокую чувствительность и надежность, практически неограниченный срок службы, большую мощность выходного сигнала (до нескольких ватт), что позволяет в ряде случаев не применять усилитель. К недостаткам индуктивных датчиков следует отнести нереверсивность характеристики, небольшой диапазон перемещений якоря, наличие тока холостого хода и электромагнитной силы притяжения между якорем и статором, влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки полностью или частично отсутствуют у дифференциальных индуктивных датчиков.
Дифференциальный индуктивный датчик
Он содержит два статора с катушками индуктивности L1 и L2 и один общий якорь. При перемещении якоря индуктивность одной катушки увеличивается, другой — уменьшается. Катушки индуктивности включаются или в дифференциальную измерительную схему, или как смежные плечи в мостовую измерительную схему.
Дифференциальные индуктивные датчики по сравнению с однотактными имеют более высокую точность преобразования и чувствительность. Статическая характеристика этих датчиков линейная и реверсивная.
Трансформаторные датчики
Они являются разновидностью индуктивных датчиков. Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент трансформации изменяется за счет изменения коэффициента взаимоиндуктивности М между его обмотками. Такие датчики применяются для преобразования в электрический сигнал (напряжение переменного тока) небольших линейных и угловых перемещений.
На рис. 2-6 представлен дифференциальный трансформаторный датчик с угловым перемещением якоря. Первичная обмотка датчика ω1 расположена на центральном стержне сердечника 1 и подключена к источнику переменного тока. Вторичные обмотки ω2а и ω2б расположены на крайних стержнях и соединяются последовательно и встречно. Ток, протекающий по ω1 создает переменный магнитный поток Ф1, разветвляющийся на два потока: Ф1а и Ф1б. При симметричном положении якоря 2 по отношению к статору датчика (сердечник 1 с обмотками ω1, ω2а и ω2б) магнитные потоки равны: Ф1а=Ф1б=Ф1/2, и ЭДС, индуцирующиеся во вторичных обмотках, будут также равны: Е2а=Е2б.

Так как фазы этих ЭДС противоположны (за счет встречного включения обмоток ω2а и ω2б), то напряжение на выходе датчика будет равно нулю: Uвых = Е2а — Е2б=О. При повороте якоря, который механически связан с подвижной частью объекта управления, изменяются площади поперечного сечения воздушных зазоров и между якорем и крайними стержнями сердечника. В результате этого изменятся сопротивления RM1 и RM2 магнитных цепей потоков Ф1а и Ф1б, да и сами потоки: один из них увеличивается на ΔФ, а другой уменьшится на ΔФ. Индуцирующие во вторичных обмотках ЭДС Е2а и Е2б также изменятся пропорционально изменению потоков ФIа и Ф2б. На выходе датчика появится напряжение Uвых, амплитуда которого равна разности амплитуд ЭДС Е2а и Е2б: Uвых = Е2а-Е2б, а фаза выходного напряжения будет определяться фазой большей из ЭДС.
Таким образом, характеристика такого датчика будет реверсивной и линейной (в рабочей зоне). Чувствительность дифференциального трансформаторного датчика в два раза выше, чем у однотактного, рабочая зона в два раза больше, и при симметричном положении якоря выходное напряжение равно нулю. Точность преобразования у дифференциальных трансформаторных датчиков выше, так как ввиду симметричности конструкции и схемы датчика частично взаимно компенсируются погрешности от изменения окружающей температуры и частоты источника питания.
www.eti.su
Индукционный датчик положения
Использование: для измерения линейных перемещений, с помощью преобразователя перемещения индукционного типа. Сущность: индукционный датчик положения содержит неподвижную часть и подвижную часть, установленную с возможностью перемещения относительно неподвижной части с одной степенью свободы. Неподвижная и подвижная части датчика выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом. Подвижная часть датчика установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек. Неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками. Технический результат: расширение диапазона измерений, упрощение конструкции датчика, повышение точности измерений линейных перемещений. 1 з.п. ф-лы, 9 ил.
Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений, с помощью преобразователя перемещения индукционного типа.
Известен «Бесконтактный датчик положения с взаимной индуктивностью» по патенту Франции: FR 2830614 А1 от 11.04.2003 г., МПК G01D 5/22 - [1], содержащий нанесенные печатные прямоугольные обмотки на пластинах из диэлектрического материала, рядом с обмотками находятся пластины из материала с высокой магнитной проницаемостью и ферромагнитные площадки, между которыми находится перемещаемый магнит, положение которого определяется по возмущению электромагнитного поля между ферромагнитными площадками.
Недостатком известного изобретения является то, что печатные обмотки связаны через магнитный контур, магнитная проницаемость материала которого очень сильно зависит от температуры, что требует усложнения конструкции датчика, введением температурной компенсации. Кроме того, наличие магнитного контура позволяет использовать только низкий диапазон рабочих частот, что также снижает точность измерения.
Известен «Индукционный преобразователь линейных перемещений» по а.с. СССР №1516751 от 23.10.1989 г., МПК G01B 7/00 - [2], содержащий подвижную и неподвижную части из диэлектрического материала в виде коаксиальных трубок и продольными разрезами и с нанесенными на них печатными зигзагоподобными прямоугольными обмотками, активные проводники которых взаимно параллельны и расположены с одинаковым шагом.
Также известен «Датчик положения» по патенту США US 2942212 от 21.06.1960 г., Кл. 336-30 - [3], содержащий подвижную и неподвижную части из диэлектрического материала с нанесенными на них печатными зигзагоподобными прямоугольными обмотками, активные проводники которых взаимно параллельны и расположены с одинаковым шагом.
Направление перемещения подвижной части относительно неподвижной в аналогах [2] и [3] осуществляется перпендикулярно активным длинным проводникам зигзагоподобных прямоугольных катушек. Такое перемещение катушек друг относительно друга существенно усложняет схему обработки сигналов от датчика, снижает ее надежность и повышает стоимость производства.
Прототипом предложенного технического решения является «Катушка индуктивного измерительного преобразователя» по авторскому свидетельству СССР №1552240 от 23.03.1990 года, МПК H01F 15/14, G01B 7/00 - [4], содержащая неподвижное диэлектрическое основание с размещенной на ее поверхности зигзагоподобной обмоткой в виде распределенных на поверхности основания одинаковых четырехугольных разомкнутых ячеек и подвижную часть в виде якоря, который может быть изготовлен из диэлектрика - измеряет емкость обмотки, электропроводника - измеряет добротность обмотки, или ферромагнетика - измеряет индуктивность обмотки.
Недостатком прототипа [4] является выполнение сложного геометрического канала в слое диэлектрика, укладка в него проводника обмотки и ее закрепление, что существенно усложняет технологию производства и ее стоимость. Кроме того, показания прототипа сильно зависят от температуры, при которой происходит его эксплуатация.
Исходя из вышеприведенных недостатков аналогов и прототипа, возникают задачи по расширению диапазона измерений, упрощения конструкции датчика и повышения точности измерений им линейных перемещений.
Поставленная задача решается тем, что
индукционный датчик положения, содержащий неподвижную часть и подвижную часть, установленную с возможностью перемещения относительно неподвижной части с одной степенью свободы, неподвижная и подвижная части датчика выполнены из диэлектрического материала, обращены друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, при этом подвижная часть установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек. Неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
Введение отличительного признака: «подвижная часть установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек» необходимо для существенного расширения диапазона измерений, а также для упрощения конструкции датчика. Такое перемещение катушек друг относительно друга существенно упрощает схему обработки сигналов от датчика и позволяет увеличить рабочие частоты датчика и, следовательно, увеличить его точность.
Выполненные на неподвижных и подвижных частях катушки по технологии печатных плат содержат тонкий слой металла, которому навязываются свойства подложки печатной платы. А подложка - пластина из композитного материала, как известно, обладает малыми коэффициентами линейного и объемного теплового расширения, что обеспечивает стабильность измерения в широких диапазонах температур.
Введение отличительного признака: «неподвижная часть индукционного датчика положения содержит две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части» необходимо для повышения точности измерений линейных перемещений заявленным индуктивным датчиком перемещения. Кроме того, существенно повышается температурная стабильность работы датчика, за счет работы на разностном сигнале от двух неподвижных катушек, которые идентичны по температурным характеристикам.
По второму пункту формулы заявляемого технического решения известно выполнение «Схемы с линейно регулируемым дифференциальным трансформатором LVDT в качестве датчика перемещения или датчика силы и способ использования такой схемы» по патенту Германии №10313021 В3 от 02.09.2004 года, МПК G01B 7/02 - [5], с одной первичной обмоткой и двумя вторичными обмотками, выходы которых через соответственно два интегратора подсоединены к сумматору, выход которого подключен к разъему внешнего электрического устройства.
Однако в известном аналоге [5] и в заявляемом техническом решении имеются существенные отличия. Так, в аналоге [5] из задающего генератора на первичную обмотку подаются «треугольные» сигналы (импульсы) с регулируемыми передними и задними фронтами, а в заявляемом техническом решении из задающего генератора на первичную обмотку подаются синусоидальные сигналы, и между катушками нет сердечника, что позволяет повысить рабочие частоты и соответственного чувствительность индукционного датчика.
На фиг.1 представлены неподвижная и подвижная части индукционного датчика перемещения из диэлектрического материала, с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности (вид на катушки). На фиг.2 - вид неподвижной и подвижной частей индукционного датчика перемещения в рабочем состоянии (неподвижная и подвижная части индукционного датчика перемещения обращены друг к другу катушками). На фиг.3 - неподвижная часть датчика с двумя катушками и подвижная часть датчика с одной катушкой (вид на катушки). На фиг.4 - вид неподвижной и подвижной частей датчика по фиг.3 в рабочем состоянии (неподвижная и подвижная части индукционного датчика перемещения обращены друг к другу катушками). На фиг.5 - вид индукционного датчика перемещения по фиг.3 и по фиг.4, установленного в прибор для испытания датчика. На фиг.6 - эквивалентная схема индукционного датчика перемещения из одной неподвижной и одной подвижной катушек. На фиг.7 - схемотехническое решение для обеспечения работоспособности датчика по фиг.6. На фиг.8 - эквивалентная схема индукционного датчика перемещения из двух неподвижных и одной подвижной катушек. На фиг.9 - схемотехническое решение для обеспечения работоспособности датчика по фиг.8.
Индукционный датчик положения содержит неподвижную 1 и подвижную 2 части с возможностью перемещения подвижной 2 части относительно неподвижной 1 части с одной степенью свободы. Неподвижная 1 и подвижная 2 части датчика выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно 3 и 4, с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом. При этом подвижная 2 часть установлена с возможностью перемещения относительно неподвижной 1 части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек 3 и 4. Другими словами направление перемещения подвижной части 2 относительно неподвижной 1 осуществляется параллельно активным длинным проводникам зигзагоподобных прямоугольных катушек 3 и 4. Неподвижная часть индукционного датчика положения может содержать две идентичные катушки 3 и 5, установленные вдоль направления перемещения подвижной части 2 с катушкой 4, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками 3 и 5 неподвижной части 1. Прибор для испытания индукционного датчика перемещения с двумя неподвижными (3 и 5) и одной подвижной катушкой 4 содержит основание 6 и подвижную каретку 7, катушки 3 и 5 соединены с устройством обработки сигналов неподвижными проводами 8, а катушка 4 - гибкими проводами 9.
Для объяснения работы индукционного датчика перемещения могут быть применены эквивалентные схемы в виде трансформатора - фиг.6 или дифференциального трансформатора - фиг.8, с линейно изменяющимся коэффициентом связи между катушками. Для обеспечения работоспособности индуктивных датчиков перемещения по структурным схемам фиг.6 и фиг.8 могут быть использованы типовые схемотехнические решения, представленные соответственно на фиг.7 и фиг.9.
На фиг.7: Г - генератор синусоидального сигнала питания катушки 4 подвижной части 2; ПД - пиковый детектор; У - усилитель масштабный; Uвых - аналоговый выходной сигнал с катушки 3, пропорциональный перемещению подвижной части 2 с катушкой 4.
На фиг.9: Г - генератор синусоидального сигнала питания катушки 4 подвижной части 2; ПД1 - пиковый детектор катушки 3 неподвижной части 1; ПД2 - пиковый детектор катушки 5 неподвижной части 1; У - усилитель масштабный разностного сигнала; Uвых - аналоговый выходной сигнал, пропорциональный перемещению подвижной части 2 с катушкой 4.
Реально для рабочих частот порядка 2-х МГц в габаритных размерах подвижной 2 части 42×22 мм и неподвижной 1 части 84×22 мм, шагом проводников катушек 4, 3 и 5, равным 0,8 мм, при ширине проводников 0,5 мм и воздушном зазоре между подвижной и неподвижной частью 0,2 мм рабочая зона по перемещению подвижной части 2 составляет 30 мм. Диапазон изменения выходного сигнала при этом составляет ±2 В с погрешностью преобразования не хуже ±0,5%.
Современная технология печатных плат позволяет изготавливать печатные катушки с высокой степенью точности, в связи с этим, при необходимости получения более высокой точности преобразования, требования к шагу и ширине проводников, а также к воздушному зазору между катушками могут быть и более жесткими.
Как видно из вышеизложенного, наиболее целесообразно использовать такой индукционный датчик перемещения в системах контроля деформации различных объектов.
Полагаем, что предложенный индукционный датчик положения обладает всеми критериями изобретения, так как совокупность с ограничительных и отличительных признаков формулы изобретения по п.1 и по п.2 является новым для конструкций индукционных датчиков положения и, следовательно, соответствует критерию «новизна».
Совокупность признаков формулы изобретения предложенного устройства неизвестна на данном уровне развития техники и не следует общеизвестным правилам разработки и конструирования индукционных датчиков положения, что доказывает соответствие критерию «изобретательский уровень».
Разработка, конструирование и внедрение предложенного индукционного датчика положения не представляет никаких конструктивно-технических и технологических трудностей, откуда следует соответствие критерию «промышленная применимость».
Литература
1. Патент Франции: FR 2830614 А1 от 11.04.2003 г., МПК G01D 5/22 - «Бесконтактный датчик положения с взаимной индуктивностью».
2. Авторское свидетельство СССР № по А.С. СССР №1516751 от 23.10.1989 г., МПК G01B 7/00 - «Индукционный преобразователь линейных перемещений».
3. Патент США US 2942212 от 21.06.1960 г., Кл. 336-30 - «Датчик положения».
4. Авторское свидетельство СССР №1552240 от 23.03.1990 года, МПК H01F 15/14, G01B 7/00 - «Катушка индуктивного измерительного преобразователя» - прототип.
5. Патент Германии №10313021 В3 от 02.09.2004 года, МПК G01B 7/02 - «Схема с линейно регулируемым дифференциальным трансформатором LVDT в качестве датчика перемещения или датчика силы и способ использования такой схемы».
1. Индукционный датчик положения, содержащий неподвижную часть и подвижную часть, установленную с возможностью перемещения относительно неподвижной части с одной степенью свободы, неподвижная и подвижная части датчика, выполненные из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, отличающийся тем, что подвижная часть установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек.
2. Индукционный датчик положения по п.1, отличающийся тем, что неподвижная часть индукционного датчика положения содержит две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
www.findpatent.ru








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






