08 семестр / Разное / Скамко / inform / Шаговые двигатели. Как устроен шаговый двигатель
Шаговый двигатель своими руками: принцип работы, управление
Шаговые двигатели и их микропроцессорные системы управления
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое биполярный шаговый двигатель, его принцип работы, как сделать и установить устройство своими руками, а также где купить такой генератор с редуктором.
Информация о шаговом приводе
Униполярный или биполярный шаговый привод (двигатель) – это специальный бесщеточный электрический двигатель постоянного тока, который разделяет полный оборот на несколько равных шагов. Для работы этого прибора необходимы специальная деталь: контроллер шагового двигателя.
Поимо магнитных деталей и обмоток, также в нем есть приборная панель (блок управления), сигнализаторы, передатчики.
В основном он используется для шлифовального и фрезерного станка, работы различных бытовых устройств, производственных механизмов и транспортных средств.
Принцип работы
Когда напряжение прикладывается к клеммам, специальные щетки двигателя начинают непрерывно вращаться. Шаговый движок холостого хода является уникальным благодаря своему важному свойству: преобразовывать поступающие входные импульсы (обычно прямоугольной направленности) в предварительно определенное положение приложенного ведущего вала.
Каждый импульс перемещает вал под фиксированным углом. Устройства с таким редуктором максимально эффективны, если имеют несколько электромагнитов зубчатого типа, расположенных вокруг центрального зубчато-образного куска железа. Электромагниты возбуждаются от внешней цепи управления, которую чаще всего представляет микроконтроллер. Чтобы сделать поворот вала двигателя, один электромагнит, к которому прикладывается энергия, как бы притягивает к своей поверхности зубья зубчатого колеса. Когда они выровнены по отношению к ведущему электромагниту, они слегка смещаются к следующей магнитной детали.
Первый электромагнит должен выключиться, а следующий включиться, тогда шестеренка будет вращаться, чтобы выровняться с предыдущим колесом, после чего процесс повторяется необходимое количество раз. Именно эти вращения называются постоянным шагом, скорость вращения двигателя определяется при помощи подсчета количества шагов для полного оборота или (оборотов) двигателя.
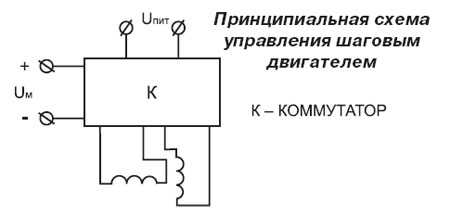
Схема управления шаговым двигателем имеет следующий вид:
Также для контроля работы устройства используется драйвер шагового двигателя. Это необходимо, если Вы будете настраивать мотор для работы станка с ЧПУ, отдельный ветрогенератор или используете его для работы ветряка.
Описание типов шаговых двигателей
Всего существует четыре основных типа шаговых двигателей:
- С постоянным магнитом
- Гибридный синхронный шаговый
- Переменный.
Привод с постоянным магнитом
Устройства с магнитами применяют магнитную деталь в роторе. Они работают на принципе притяжения или отталкивания ротором и статором электромагнитного мотора. Переменно-шаговый двигатель имеет простой ротор из железа и работает на основе фундаментального принципа, по которому минимально допустимое отталкивание происходит с наименьшим зазором, исходя из этого, точки ротора притягиваются к полюсам магнитного статора. Устройства гибридного типа сочетают в себе оба описанных ранее принципа, это самые дорогие приборы.
Шаговые двухфазные двигатели
Самым распространенным типом данных механизмов по праву считается шаговый двухфазный мотор. Этот прибор достаточно простой, чтоб его можно было установить без какого-либо опыта, и довольно сложный, чтобы стоить дороже асинхронного движка.
Пошаговый двухфазный самодельный и купленный двигатель может иметь два основных типа обмотки для электромагнитных катушек: биполярную и униполярную.
Униполярный (однополярный) шаговый двигатель оснащен одной обмоткой с центральным магнитным краном, который влияет на каждую фазу. Каждая секция обмотки включается для того, чтобы обеспечивать определенное направление магнитного поля. Поскольку в такой конструкции магнитный полюс может работать без дополнительного переключения, то направления тока, коммутация цепи осуществляются очень просто (например, для стандартного среднемощного двигателя будет достаточно одного транзистора) для каждой обмотки. Как правило, учитывая фазовые переключения: три провода на фазу и шесть для выходного сигнала являются типичными для двухфазного двигателя.
Шаговые двигатели и их микропроцессорные системы управления – это очень интересный раздел электротехнических наук. Микроконтроллер двигателя может быть использован для того, чтобы активировать транзистор в нужной (определенной программой) последовательности.
В свою очередь обмотки могут быть подключены путем прикосновения соединительных проводов вместе с постоянными магнитами двигателя. Если клеммы катушки соединятся, вал будет сложно повернуть. Сопротивление между общим проводом и торцом катушки проволоки всегда равняется половине сопротивления между торцами катушек и торцами проводов. Это потому что общий провод всегда длиннее, чем половина, соединяющая катушки.
Биполярные двигатели оснащены одной фазовой обмоткой. Ток в неё поступает переломным образом при помощи магнитного полюса, поэтому управляющая схема должна быть сложнее, как правило, с соединяющим мостом. Есть два провода на фазу, но они не являются общими. Смешение сигнала шагового двигателя на более высокой частоте, может снижать эффект трения системы.
Также бывает трехфазный двигатель, у него более узкая область деятельности, такой шаговый механизм используется для фрезерных станков с ЧПУ (которые запускаются с компьютера), автомобилей типа Опель Вектра, Ниссан, Рено, ВАЗ и прочих транспортных средств, где необходимо использование дроссельной заслонке. Также для дисковода и принтера Epson используется шаговый мотор ЕМ-234 (EM-234).
Как подключить шаговый двигатель
Подключение шагового двигателя осуществляется по определенной схеме, в зависимости от того, сколько проводов имеет привод, и как Вы хотите запустить прибор.
Шаговые двигатели могут поставляться с четырьмя, пятью, шестью или восемью проводами. Если двигатель имеет четыре провода, то он может использоваться только с биполярным устройством. Каждая из двух фазных обмоток имеет пару проводов. Используйте метр, чтобы определить пары проводов с непрерывной связью между ними, чтобы подключить драйвер пошагово.
Мощный шести-проводной мотор имеет пару проводов для каждой обмотки и центр-кран для каждой обмотки. Он может быть подключен как к однополярному, так и к биполярному устройству. Используйте измерительный прибор для разделения провода. Для подключения к однополярному устройству можно использовать все шесть проводов. Для биполярного только один конец провода и один центральный кран каждой обмотки.
Пяти-проводной мотор похож на шестипроводной прибор, но центральные клеммы соединены внутри в качестве сплошного кабеля, и выходят к одному проводу. Поэтому отделить обмотки одну от другой практически невозможно без разрывов. Лучшее решение – это определить центр провода и соединять его с прочими проводниками, такой режим не только очень безопасен, но и максимально эффективен. После подключить прибор и проверить его работоспособность.
Технические характеристики
Номинальное напряжение будет производить первичная обмотка при постоянном токе.
Начальная скорость крутящего момента шагового двигателя будет изменяться прямо пропорционально с током. От схемы привода и индуктивности обмоток зависит, как быстро линейный момент понижается на последующих высоких скоростях. Часто шаговые двигатели приспособлены к суровым условиям труда, они имеют IP65 степень защиты.
Часто сравнивают серводвигатель (сервопривод) и шаровую модель, но последние работают гораздо дольше и являются более продуктивными, им реже нужен ремонт. Но привод может пропустить больше вольт. Поэтому сравнивать эти модели нецелесообразно.
Перед тем, как выбрать прибор, нужно знать характеристики самых популярных шаровых двигателей российского производства:
Не менее активно используются ДШР-40 (четырехфазные), NEMA 23, SanyoDenkiSM28, FDD (floppy-disk – флоппи диск), SM-200-0.22, SP-57, STH-39D1112, Purelogic R&D с энкодером. Чтобы подобрать нужный электрический двигатель, Вам нужно просчитать нужные параметры мощности, напряжение и крутящего момента. Чтобы определить эти данные, Вам нужно провести расчет.
Самой явной проблемой при работе шагового двигателя является управление шаговым двигателем без контроллера. Чтобы решить эту незадачу Вам нужно использовать специальный блок логической связи, который поможет управлять устройством без микросхемы контроллера. Но мы советуем разрабатывать систему контроля шагового двигателя именно на контроллере: Attiny2313, AVR-USB-MEGA16 (подсоединяется через usb), CNC-1318, HDD, PLCM-LPT, PIC, CD ULN, Arduino (Арудино) UNO, ATmega8, драйвер l293d.
Обзор цен
Продажа шагового двигателя осуществляется в России, Украине, Беларуси и прочих странах в любом электротехническом магазине, цена зависит от типа прибора, мощности в кВт и его предназначения.
Цена на шаговый однополярный двигатель, у.е.
2014-06-07 Автор: Дмитрий Макаров | Рубрика: Электродвигатель
Принцип работы синхронного двигателя
Электродвигатель постоянного тока (motor DC) 12, 24, 220 вольт
Коллекторный двигатель постоянного и переменного тока
Вентильный двигатель постоянного тока
Отзывы и комментарии
Вы можете оставить отзывы и комментарии к записи: " Шаговые двигатели и их микропроцессорные системы управления "
http://www.asutpp.ru
legkoe-delo.ru
Шаговые двигатели
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
Производители шаговых двигателей: Autonics, Motionking, Fulling motor и другие.
Шаговые двигатели: принцип действия и отличия от двигателей постоянного тока
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
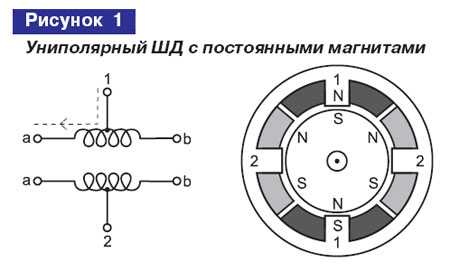
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
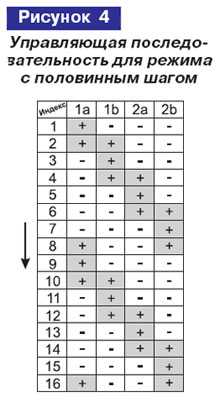
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 при симметричной системе коммутации;
n1=2 при несимметричной системе коммутации;
n2=1 при однополярной коммутации;
n2=2 при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4 6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
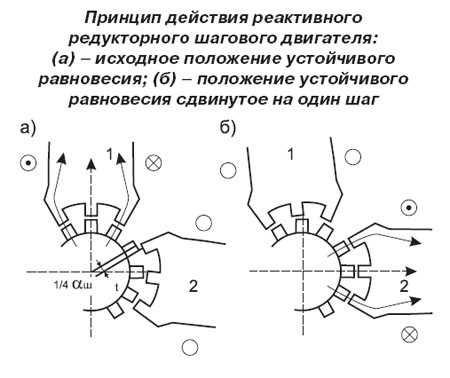
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
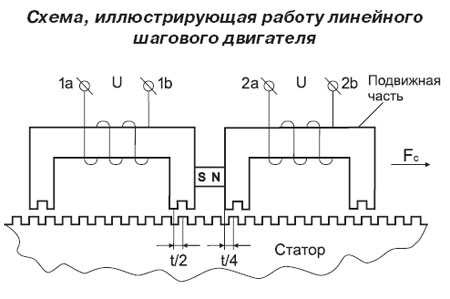
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя
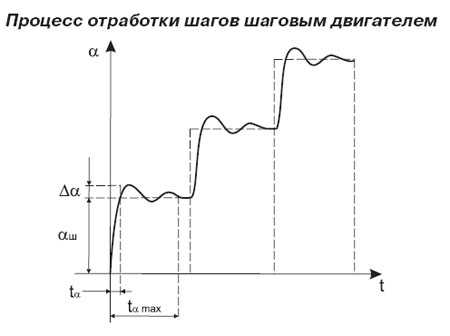
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода xследующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемлемость падает с увеличением нагрузки.
В. П. Колодийчик.
market.elec.ru
Шаговый двигатель [Robotic & Microcontroller Educational Knowledgepage
Теория

Шаговый двигатель
Шаговые двигатели широко применяются в приложениях, требующих точность. В отличие от двигателя постоянного тока у шагового двигателя отсутствуют щетки и коммутатор - для этого там несколько отдельных обмоток, которые коммутируются внешней электроникой (драйвером). Вращение ротора происходит за счет коммутации обмоток шаг за шагом, без обратной связи. Здесь проявляется и один недостаток шаговых двигателей - в случае механической перегрузки, когда ротор не двигается, шаги начинают путаться и движение становится неточным. По виду обмоток, шаговые двигатели разделяются на два типа: униполярные и биполярные шаговые двигатели. По строению их делят еще на три вида:
С переменным магнитным сопротивлением (высокая точность, низкий крутящий момент, низкая цена)
С постоянным магнитом (низкая точность, высокий крутящий момент, низкая цена)
Гибридный (высокая точность, высокий крутящий момент, высокая цена)
У шаговых двигателей с переменным магнитным сопротивлением зубчатые обмотки и зубчатый ротор из железа. Максимальная сила тяги возникает при перекрытии зубьев обоих сторон. В шаговых двигателях с постоянным магнитом, как следует из названия, есть постоянный магнит, который ориентируется в зависимости от полярности обмотки. В гибридных используются обе технологии.
Независимо от модели шагового двигателя для создания одного полного оборота вала (360 градусов) требуется сотня коммутационных шагов. Для обеспечения стабильного и плавного движения используют подходящую управляющую электронику, которая управляет двигателем в соответствии с его параметрами (инертность ротора, крутящий момент, резонанс и т.д.). Вдобавок в управляющей электронике можно применять различные методы коммутации. Коммутацию последовательно по одной обмотке называют полным шагом, но если коммутируется поочередно одна и две обмотки, то это называется полушагом. Используют так же синусоидальные микрошаги, что дает особую точность и плавность управления.
~~PB~~
Униполярный шаговый двигатель
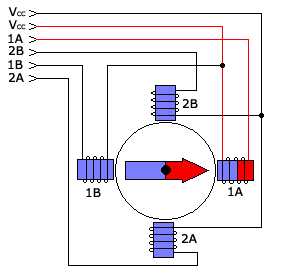
Обмотки униполярного шагового двигателя
Униполярный шаговый двигатель имеет пять или шесть проводов. В соответствии со схемой привода запускается разом только одна четвертая обмоток. Линии Vcc обычно соединяются с положительным питающим напряжением двигателя. Концы обмоток 1a, 1b, 2a, и 2b соединяются при коммутации через транзисторы только с землей, в связи, с чем их управляющая электроника довольно простая.
Биполярный шаговый двигатель
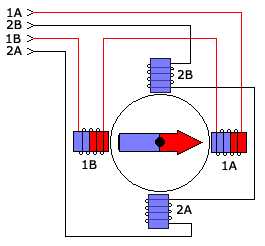
Обмотки биполярного шагового двигателя
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение. Униполярные шаговые двигатели можно запускать и с помощью биполярного драйвера: для этого нужно соединить только линии обмоток 1a, 1b, 2a и 2b (Vcc остается не соединенным).
Необходимые коммутации полного шага и полушага шаговых двигателей с обоими видами обмоток отображает следующая таблица. Так как в случае драйвера униполярного шагового двигателя происходит только отпирание транзисторов, то эти шаги представлены логическими числами 0 и 1. Управление биполярным шаговым двигателем может потребовать больше сигналов, и его шаги представлены выходной полярностью драйвера.
| 1 | 10 | 0 | 0 | +- | - | - |
| 2 | 0 | 10 | 0 | - | +- | - |
| 3 | 0 | 0 | 10 | - | - | +- |
| 4 | 0 | 0 | 0 | 1- | - | - | +
| 1 | 10 | 0 | 0 | +- | - | - |
| 2 | 1 10 | 0 | + +- | - | ||
| 3 | 0 | 10 | 0 | - | +- | - |
| 4 | 0 | 1 10 | - | + +- | ||
| 5 | 0 | 0 | 10 | - | - | +- |
| 6 | 0 | 0 | 1 1- | - | + +||
| 7 | 0 | 0 | 0 | 1- | - | - | +
| 8 | 10 | 0 | 1 +- | - | +
Практика
Цель упражнения запустить биполярный шаговый двигатель, вместо чего можно использовать по приведенному выше методу и униполярный двигатель. На плате модуля «Двигателя» имеются два драйвера L293D, которые управляются четырьмя входными выводами микроконтроллера. Каждый вывод обозначает один конец полярности обмотки. Напряжение конца обмотки положительное, если вывод высокий, и отрицательное, если вывод низкий. Концам 1A, 1B, 2A и 2B соответствуют выводы микроконтроллера PB0, PB1, PB2 и PB3.
Для управления биполярным шаговым двигателем в библиотеке Домашней Лаборатории есть функция bipolar_init, которая настраивает выводы выходом и функция bipolar_halfstep, которая совершает вращение на определенное количество полушагов. Коммутация происходит по таблице полушагов, но используются более сложные битовые операции.
// // Подготовка управления биполярного шагового двигателя // void bipolar_init(void) { DDRB |= 0x0F; PORTB &= 0xF0; } // // Передвижение биполярного шагового двигателя полушагами // void bipolar_halfstep(signed char dir, unsigned short num_steps, unsigned char speed) { unsigned short i; unsigned char pattern, state1 = 0, state2 = 1; // Утверждение направления +- 1 dir = ((dir < 0) ? -1 : +1); // Осуществление полушагов for (i = 0; i < num_steps; i++) { state1 += dir; state2 += dir; // Создание шаблона pattern = (1 << ((state1 % 8) >> 1)) | (1 << ((state2 % 8) >> 1)); // Обозначение выхода PORTB = (PORTB & 0xF0) | (pattern & 0x0F); // Создание паузы для ожидания выполнения шага sw_delay_ms(speed); } // Остановка двигателя PORTB &= 0xF0; }Использование функций демонстрирует пример программы, которая поворачивает двигатель попеременно в одну и другую сторону на 200 полушагов. Скорость вращения двигателя определяет длинна паузы, создаваемая между шагами. Если паузу настроить слишком маленькой, то двигатель не успевает осуществлять вращение в связи с инертностью ротора и вал не двигается.
// // Тест-программа биполярного шагового двигателя // модуля «Двигатели» Домашней Лаборатории // #include <homelab/module/motors.h> // // Основная программа // int main(void) { // Настройка двигателя bipolar_init(); // Бесконечный цикл while (true) { // Вращение в одну сторону 200 полушагов со скоростью 30 мс/шаг bipolar_halfstep(+1, 200, 30); // Вращение в другую сторону 200 полушагов со скоростью 30 мс/шаг bipolar_halfstep(-1, 200, 30); } }home.roboticlab.eu
Персональный сайт - шаговый двигатель
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговые двигатели
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.Производители шаговых двигателей: Autonics, Motionking, Fulling motor и другие.
Шаговые двигатели: принцип действия и отличия от двигателей постоянного тока
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
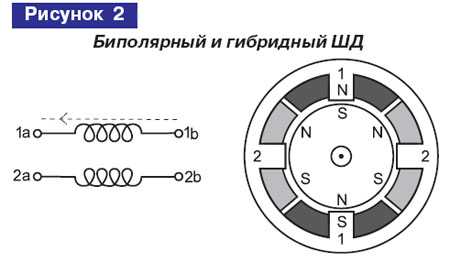
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.

На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.

Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».

Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора)mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.

При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.

Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.

Приемлемость падает с увеличением нагрузки.
xleds.narod.ru
Шаговые двигатели
Шаговые двигатели
Шаговые двигатели уже давно и успешно применяются в самых разнообразных устройствах. Их можно встретить в дисководах, принтерах, плоттерах, сканерах, факсах, а также в разнообразном промышленном и специальном оборудовании. В настоящее время выпускается множество различных типов шаговых двигателей на все случаи жизни. Однако правильно выбрать тип двигателя – это еще полдела. Не менее важно правильно выбрать схему драйвера и алгоритм его работы, который зачастую определяется программой микроконтроллера. Цель этой статьи – систематизировать сведения об устройстве шаговых двигателей, способах управления ими, схемах драйверов и алгоритмах.
Что такое шаговый двигатель, и зачем он нужен? Шаговый двигатель – это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов (рис. 1).
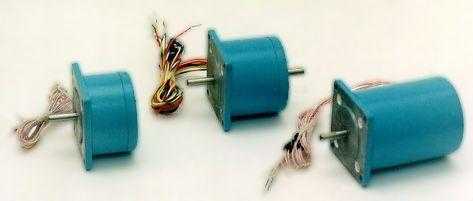 Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми. Чем же хорош шаговый двигатель?
угол поворота ротора определяется числом импульсов, которые поданы на двигатель
двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
возможность быстрого старта/остановки/реверсирования
высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо...
шаговым двигателем присуще явление резонанса
возможна потеря контроля положения ввиду работы без обратной связи
потребление энергии не уменьшается даже без нагрузки
затруднена работа на высоких скоростях
невысокая удельная мощность
относительно сложная схема управления
Что выбрать? Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей. Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы. Виды шаговых двигателей Существуют три основных типа шаговых двигателей:
двигатели с переменным магнитным сопротивлением
двигатели с постоянными магнитами
гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Двигатели с переменным магнитным сопротивлением Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 2). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 град.
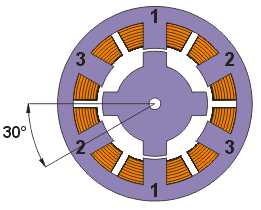 Рис. 2. Двигатель с переменным магнитным сопротивлением.
Рис. 2. Двигатель с переменным магнитным сопротивлением.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях. Двигатели с постоянными магнитами Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 3). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
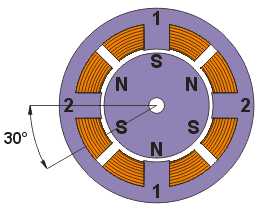 Рис. 3. Двигатель с постоянными магнитами.
Рис. 3. Двигатель с постоянными магнитами.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град). Разрез реального шагового двигателя с постоянными магнитами показан на рис. 4.
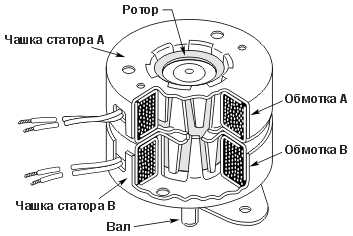 Рис. 4. Разрез шагового двигателя с постоянными магнитами.
Рис. 4. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит. Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением. Гибридные двигатели Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 5).
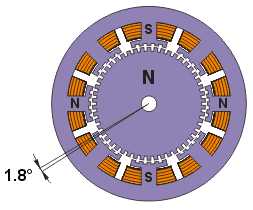 Рис. 5. Гибридный двигатель.
Рис. 5. Гибридный двигатель.
Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph*Ph) = 360/N, где Nph – чило эквивалентных полюсов на фазу = число полюсов ротора, Ph – число фаз, N - полное количество полюсов для всех фаз вместе.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град. Продольное сечение гибридного шагового двигателя показано на рис. 6. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
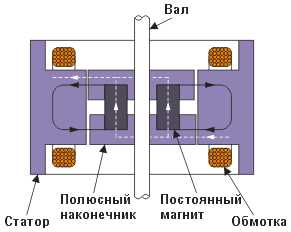 Рис. 6. Продольный разрез гибридного шагового двигателя.
Рис. 6. Продольный разрез гибридного шагового двигателя.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток. Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться. Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью. Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается. Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно. Большинство современных шаговых двигателей являются гибридными. По сути гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6 грд или 1.8 грд. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим. Биполярные и униполярные шаговые двигатели В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).
Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Биполярный или униполярный? Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor. Диаграммы, диаграммы... Существует несколько способов управления фазами шагового двигателя. Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис 8а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
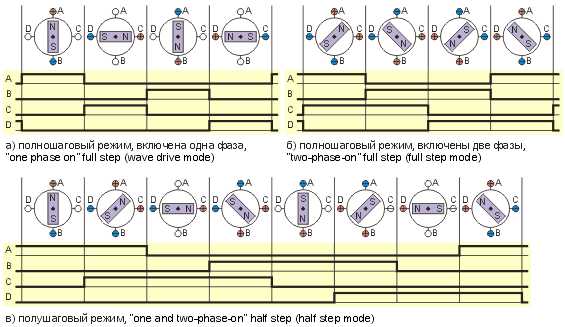 Рис. 8. Различные способы управления фазами шагового двигателя.
Рис. 8. Различные способы управления фазами шагового двигателя.
Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 8б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага. Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной. Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется. Держи его! В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину. Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда в остановленном состоянии двигатель должен обеспечивать полный момент, что для шагового двигателя возможно. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Поскольку современные драйверы позволяют регулировать ток питания обмоток двигателя, задание необходимого тока удержания обычно не представляет проблем. Задача обычно заключается просто в соответствующей программной поддержке для управляющего микроконтроллера. Полушаговый режим Основным принципом работы шагового двигателя является создание вращающегося магнитного поля, которое заставляет ротор поворачиваться. Вращающееся магнитное поля создается статором, обмотки которого соответствующим образом запитываются. Для двигателя, у которого запитана одна обмотка, зависимость момента от угла поворота ротора относительно точки равновесия является приблизительно синусоидальной. Эта зависимость для двухобмоточного двигателя, который имеет N шагов на оборот (угол шага в радианах S = (2*pi)/N), показана на рис. 9.
Рис. 9. Зависимость момента от угла поворота ротора для одной запитанной обмотки.
Реально характер зависимости может быть несколько другой, что объясняется неидеальностью геометрии ротора и статора. Пиковое значение момента называется моментом удержания. Формула, описывающая зависимость момента от угла поворота ротора, имеет следующий вид:
T = - Th*sin((pi/2)/S)*Ф), где T – момент, Th – момент удержания, S – угол шага, Ф – угол поворота ротора.
Если к ротору приложить внешний момент, который превышает момент удержания, ротор провернется. Если внешний момент не превышает момента удержания, то ротор будет находится в равновесии в пределах угла шага. Нужно отметить, что у обесточенного двигателя момент удержания не равен нулю вследствие действия постоянных магнитов ротора. Этот момент обычно составляет около 10% максимального момента, обеспечиваемого двигателем. Иногда используют термины «механический угол поворота ротора» и «электрический угол поворота ротора». Механический угол вычисляется исходя из того, что полный оборот ротора составляет 2*pi радиан. При вычислении электрического угла принимается, что один оборот соответствует одному периоду угловой зависимости момента. Для приведенных выше формул Ф является механическим углом поворота ротора, а электрический угол для двигателя, имеющего 4 шага на периоде кривой момента, равен ((pi/2)/S)*Ф или (N/4)*Ф, где N – число шагов на оборот. Электрический угол фактически определяет угол поворота магнитного поля статора и позволяет строить теорию независимо от числа шагов на оборот для конкретного двигателя. Если запитать одновременно две обмотки двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками по отдельности (рис. 10).
studfiles.net





Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






