Схемы подключения шаговых двигателей nema. Шаговый двигатель как подключить
Крутим шаговый двигатель - Как подключить - AVR project.ru

Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе. Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя.
Существует несколько алгоритмов управления питанием обмоток двигателя. Самым простым является полношаговое управление, когда в любой момент времени запитана только одна из половинок обмоток. Для наглядности накидал табличку показывающую последовательность включения обмоток:
Ротор при таком управлении принимает естественное положение относительно статора. Есть еще способ управления шаговиком в полношаговом режиме, когда одновременно запитываются две фазы, таким образом удается увеличить момент на валу на 40%.
Главным недостатком полношагового управления являются аццкие вибрации двигателя и малая дискретность шага, равная паспортному значению.
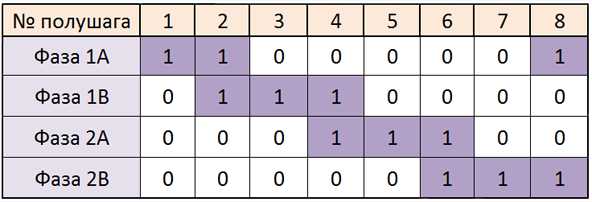
Для того чтобы уменьшить вибрации и добится более плавного и точного вращения вала существует более продвинутый способ - управление в полушаговом режиме, алгоритм включения половинок обмоток приведен ниже: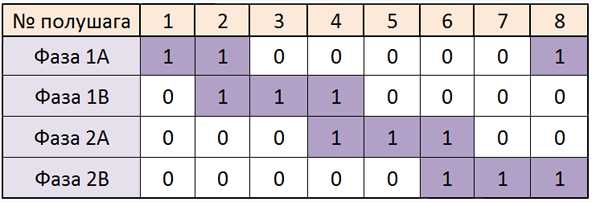
При такой работе вал двигателя за один цикл совершает половину шага и фиксируется между двумя естественными состояниями равновесия. Таким образом дискретность поворота вала увеличивается в 2 раза.
Есть еще способ увеличить дробленеи шага ротора двигателя - микрошаговое управление - когда обмотка не просто запитывается, а запитывается определенным током. И от отношения тока в соседних обмотках зависит положение ротора - чем больший ток течет в обмотке по отношению к соседней, тем ближе к ней смещается ротор и наоборот. Это позволяет увеличить дробление шага в десятки и сотни (!) раз.
С теорией немного разобрались, теперь нужно выбрать в каком режиме будет управляться двигатель. Полный шаг слишком убог и не эффективен, микрошаг сложен, да и нужен он в основном в управлении приводом высокоточного ЧПУ станка. Поэтому крутить будем в полушаге :)
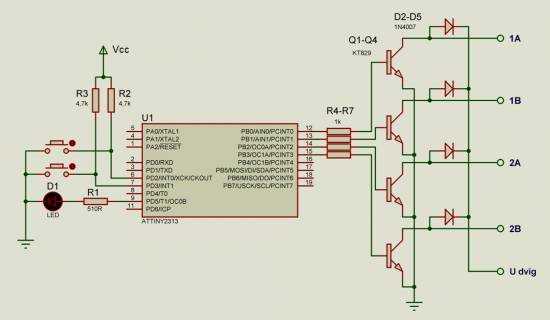
Схема базируется на микроконтроллере attiny2313 и имеет две кнопки. При нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой - в другую. В качестве ключевых транзисторов выбраны КТ829, способные протащить через себя до 8 Ампер.
 К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.Плата управления в сборе:


Красный светодиод загорается при нажатии одной из кнопок. Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Код в Bascom-AVR:
$regfile = "2313def.dat"$crystal = 4000000Dim S As Byte 'эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 'даем имена обработчикам внешних прерыванийOn Int1 Knopka2
Config Portb = Output 'конфигурируем порт на выходConfig Portd.5 = Output 'конфигурируем ногу для подключения светодиодаLed Alias Portd.5 'присваиваем имя LED выводу 5 порта D
'прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажатаConfig Int0 = Low LevelConfig Int1 = Low Level
'разрешаем прерыванияEnable InterruptsEnable Int0Enable Int1
'основной цикл программы, просто ждем прерыванияDo
Loop
Knopka1: 'обработчик прерывания первой кнопки
Led = 1 'зажигаем светодиод
Incr S 'увеличим номер шага
If S = 9 Then 'максимально возможный номер шага = 8 S = 1 End If
Select Case S 'выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001Case 2 : Portb = &B00000011Case 3 : Portb = &B00000010Case 4 : Portb = &B00000110Case 5 : Portb = &B00000100Case 6 : Portb = &B00001100Case 7 : Portb = &B00001000Case 8 : Portb = &B00001001
End Select
Waitus 1000 'задержка между шагами
Led = 0 'гасим светодиод
Return
Knopka2: 'обработчик прерывания второй кнопки
Led = 1 'зажигаем светодиод
Decr S 'тут все тоже самое, только в обратном направлении
If S = 0 Then 'минимально возможный номер шага = 1 S = 8 End If
Select Case S
Case 1 : Portb = &B00000001Case 2 : Portb = &B00000011Case 3 : Portb = &B00000010Case 4 : Portb = &B00000110Case 5 : Portb = &B00000100Case 6 : Portb = &B00001100Case 7 : Portb = &B00001000Case 8 : Portb = &B00001001
End Select
Waitus 1000
Led = 0 'гасим светодиод
Return
End
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
avrproject.ru
Как "крутить" шаговый двигатель без микроконтроллера
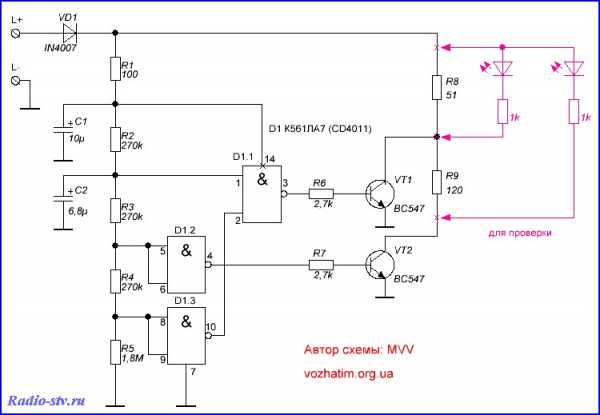
Шаговые двигатели полезны при управлении ими программируемым устройством но тем не менее могут возникать случаи когда в сложном управлении шаговым двигателем нет необходимости и нужен, всего лишь, большой крутящий момент и/или низкие обороты. Схема простого контроллера шагового двигателя приведена на рисунке: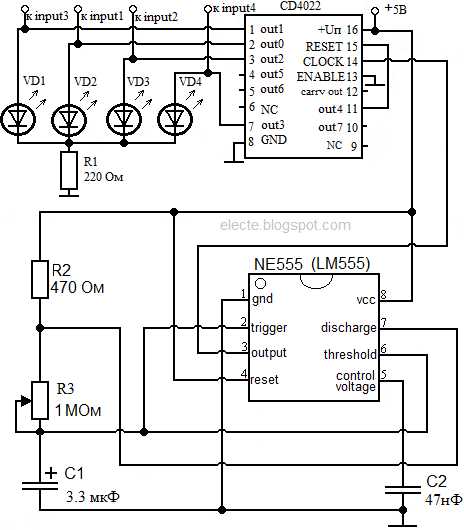
Рисунок 1 - Контроллер шагового двигателя
Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т.д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т.к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля. Вывод "11" соединён с выводом "15" для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе "11" (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод "15" (RESET) - вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе "2" который соответствует выходу out0 (т.е. 0 импульсов пришло на тактовый вход). Если вывод "15" соединить с "землёй" (GND, минус ноль питания) а "14" при этом никуда не соединять то счётчик будет считать 7 импульсов, 8ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит. Схема драйвера:
Рисунок 2 - Драйвер на транзисторах
Шаговый двигатель подключается к драйверу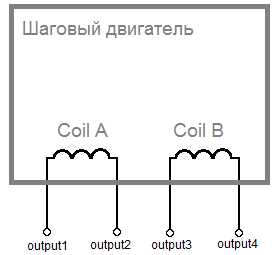
Рисунок 3 - Шаговый двигатель
Для возможности реверса двигателя можно поставить переключатели (или переключатель) так чтобы при переключении менялись местами выводы output1 с output4 и output2 с output3 например:
Рисунок 4 - Реверс шагового двигателя
Просто контроллер:Весь привод:
Купить микросхему счётчик CD4022 dip корпус (как на видео выше) 5шт. Таймер NE555 dip корпус 5шт. КАРТА БЛОГА (содержание)
electe.blogspot.com
Как подключить шаговый двигатель nema схема
Шаговый двигатель является уникальным типом двигателя постоянного тока, который вращается с фиксированными шагами определенного количества градусов. Размер шага может варьироваться от 0,9 до 90 °. Он состоит из ротора и статора. В данном примере ротор представляет из себя постоянный магнит, а статор состоит из электромагнитов (полюсов полюсов). Ротор будет перемещаться (или шагать), чтобы выровняться с помощью возбужденного магнитного поля. Если полюсные магниты находятся под напряжением один за другим вокруг круга, двигатель можно заставить двигаться в полном круге. Шаговые двигатели особенно полезны в приложениях управления, поскольку контроллер может знать точное положение вала двигателя без необходимости использования датчиков положения. Это делается путем простого подсчета количества шагов, взятых из известной ссылочной позиции. Размер шага определяется числом полюсов ротора и статора. • Нет кумулятивной ошибки (ошибка угла не увеличивается, независимо от количества шагов). Фактически, большинство систем шаговых двигателей работают с разомкнутым контуром, то есть контроллер посылает двигателю определенное количество ступенчатых команд и предполагает, что двигатель идет в нужное место. Общим примером является расположение головки чтения / записи на гибком диске. • Степперы имеют низкую скорость и поэтому часто используются без передач. Типичный блок, приводимый в действие с частотой 500 импульсов в секунду, вращается только со скоростью 150 об / мин. • Шаговые двигатели могут легко управляться, чтобы вращаться со скоростью 1 об / мин или с полной точностью.Шаговые двигатели состоят из индуктивных катушек и при питании обеспечивают значительный ток через катушки.
В результате отсоединение или подключение катушки индуктивности с током может привести к высоким напряжениям. Это может привести к повреждению драйвера шагового двигателя. Важно, чтобы драйверы отключились перед подключением или отключением двигателей. Также важно обеспечить надежную связь проводки двигателя с контроллером и любыми межсоединениями, чтобы провода не могли отсоединиться от вибрации и повредить шаговому двигателю. При замене полярности одной из катушек будет изменено направление вращения шагового двигателя. Если двигатель вращается в противоположном направлении, то в нужном направлении отключите питание от драйвера и поменяйте провода двигателя на клемме A + с проводами двигателя в клемме A-. Каждый драйвер шагового двигателя имеет диапазон напряжения питания. Более высокие напряжения обеспечивают более высокие максимальные скорости от вашего шагового двигателя, но максимальное напряжение, приложенное к контроллеру, должно быть немного ниже максимального. Когда шаговый двигатель замедляется, он действует как генератор. Это напряжение добавляет напряжения от источника питания и может превышать максимальные пики тока. В общем случае должен быть установлен ток драйвера (в RMS усилителя) для коррекции текущей работы шагового двигателя. В случае, когда драйверы имеют последовательные интерфейсы (полностью цифровые и антирезонансные драйверы), программное обеспечение Windows можно затем использовать для точного определения тока, чем физические переключатели драйвера.Для уменьшения нагрева шагового двигателя можно уменьшить ток привода.
Шаговые двигатели могут работать и нагретыми; От 50 до 80 ° C , что не является чем-то необычным, хотя это может быть неприемлемо, если моторы подвергаются воздействию, когда люди могут их трогать. Большинство драйверов имеют настройку, которая позволяет уменьшить ток двигателя, когда двигатель находится в состоянии покоя. Обычно это можно включить, отключив переключатель. Обычно эта конфигурация рекомендуется.У антирезонансных драйверов есть настройка петли тока и настройка петли положения. Токовый контур может быть автоматически настроен путем включения и выключения четвертого переключателя. Вы услышите, как мотор совершает короткий восходящий шум, когда контролеер настраивает текущий контур. Настройка петли положения для антирезонансного драйвера требует, чтобы двигатель был установлен в машине, так как на физические резонансы будет влиять на жесткость крепления и нагрузку машины.
В руководствах контроллера описывается, как настроить петлю положения, но процесс немного искусственный. Без настройки, контролеер будет по крайней мере так же хорош, как чистый синусоидальный драйвер. Все наши драйверы - это микрошаговые драйверы. Эти драйверы обеспечивают более высокую точность и плавное движение, чем шаговый двигатель с шагом 1,8 шага. Более высокие разрешения микростара приведут к более точному и плавному перемещению, но требуют более высокой частоты от вашего контроллера (например, ПК, работающего на Mach4), для вращения двигателей. Существует верхний предел частоты, с которой вы можете выйти из параллельного порта ПК (который зависит от вашего ПК, операционной системы и программного обеспечения). Мы рекомендуем начинать с разрешения микрошага 1600 шагов за оборот. Это может быть скорректировано для более тонкого движения или вниз для достижения более высоких скоростей.FL39STh48-0806B MOT-116 представляет собой двухвальный двигатель NEMA17.
Имеет фиксирующий крутящий момент 2,0 кг · см (0,196 Н · м или 28 унций). Выходной вал ⌀ 5 мм круглый. Двигатель потребляет 0,8 А на фазу. Обратите внимание, что для подключения 6-проводного шагового двигателя 2 центральных ответвителя остаются незащищенными. Мы рекомендуем использовать ленту или герметизировать провод для предотвращения нежелательных коротких замыканий.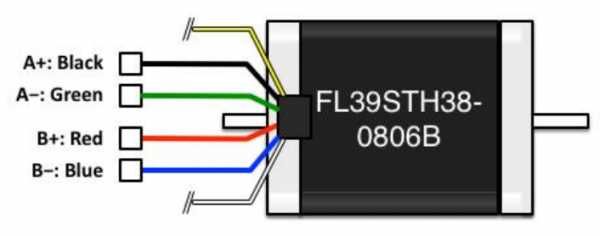 РЕКОМЕНДУЕМЫЕ ДРАЙВЕРЫ Рекомендуемым драйвером для этих двигателей является SMC-010 (DM422C). Этот драйвер обычно питается от источника питания 24 В постоянного тока.
РЕКОМЕНДУЕМЫЕ ДРАЙВЕРЫ Рекомендуемым драйвером для этих двигателей является SMC-010 (DM422C). Этот драйвер обычно питается от источника питания 24 В постоянного тока.FL42STh57-1684B MOT-121 - двигатель с двумя валами NEMA17.
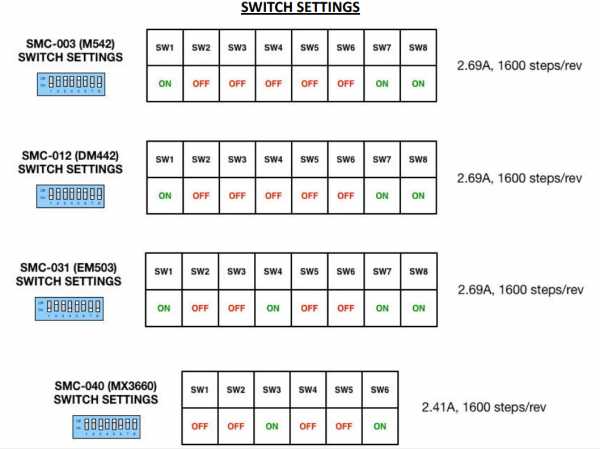
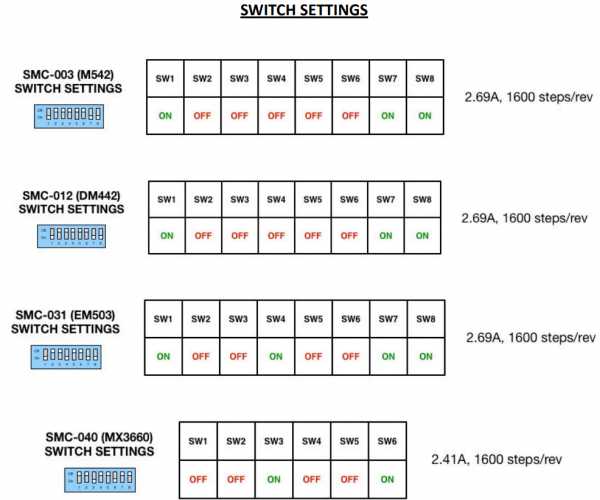
Имеет фиксирующий крутящий момент 4,4 кг · см (0,431 Н · м или 61 унция). Выходной вал ⌀5 мм круглый. Двигатель потребляет 1,68 А на фазу. РЕКОМЕНДУЕМЫЕ ДРАЙВЕРЫ Типичные характеристики напряжения SMC-003: M542 Драйвер для токовой резки 36 В постоянного тока SMC-040: MX3660 48-вольтовый трехосный драйвер
РЕКОМЕНДУЕМЫЕ ДРАЙВЕРЫ Типичные характеристики напряжения SMC-003: M542 Драйвер для токовой резки 36 В постоянного тока SMC-040: MX3660 48-вольтовый трехосный драйверFL57STH51-2804A MOT-123 - это один вал, 4-проводный двигатель NEMA23.
Имеет фиксирующий момент 10,1 кг. (0,99 Нм или 140 унций). Выходной вал равен 6,35 мм. Этот двигатель потребляет 2,8 А на фазу.

FL57STH76-2804B MOT-125 - двигатель с двумя валами NEMA23.
Имеет фиксирующий момент 18,9 кг (1,85 Нм или 262 унции). Выходной вал равен 6,35 мм. Этот двигатель потребляет 2,8 А на фазу.
FL60STH86-2008BF MOT-128 - наш самый популярный шаговый двигатель.
8-проводный двигатель, что означает, что он может быть подключен несколькими способами. Обычно рекомендуется прокладывать катушки двигателя параллельно, так как это приводит к увеличению крутящего момента на более высокой скорости (за счет небольшого крутящего момента при малой скорости). В этой конфигурации двигатель имеет номинальный ток катушки 2,8 А. Имеет фиксирующий момент 31 кг.см (3,04 Нм или 430 унций). Выходной вал ⌀6.35 мм с плоским.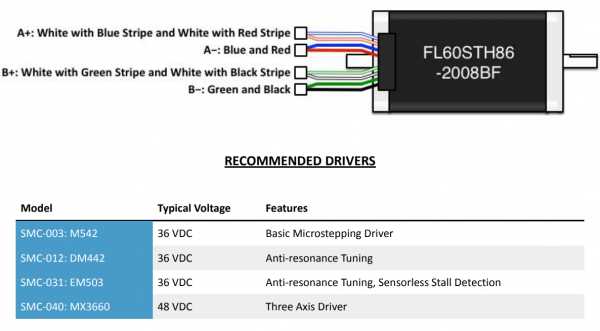
FL86STH80-5504B шаговый мотор
MOT-130 и MOT-131 - это тот же двигатель с различными конфигурациями валов. MOT-130 имеет передний и задний валы. MOT-131 - единственный вал. Передний вал на обоих моторах составляет ⌀12,7 мм с плоским. Оба имеют фиксирующий момент 46 кг.см (4,51 Нм или 638 унций). Оба двигателя потребляют 5,5 А на фазу. См. Раздел MOT-131 для рекомендуемых драйверов и настроек переключателя.
FL86STH80-5504A рекомендуемые драйверы.
Рекомендуемым драйвером для этих двигателей является SMC-033 (EM806). Этот драйвер обычно питается от источника питания 48 В постоянного тока.
FL86STh218-6004B представляет собой четырехпроводный двухступенчатый шаговый двигатель NEMA32.
Имеет фиксирующий момент 87 кг.см (8,5 Нм или 1208 озинов). MOT-132 имеет диаметр переднего вала диаметром 12,7 мм с шпоночным пазом, а задний вал диаметром 12,7 мм круглый. MOT-132 рисует 6 А на фазу.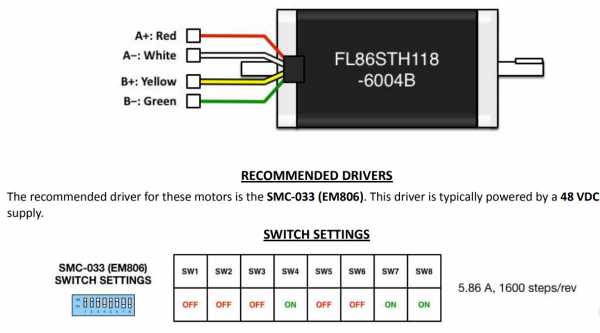 Рекомендуемым драйвером для этих двигателей является SMC-033 (EM806). Этот драйвер обычно питается от источника питания 48 В постоянного тока.
Рекомендуемым драйвером для этих двигателей является SMC-033 (EM806). Этот драйвер обычно питается от источника питания 48 В постоянного тока. FL86STh256-6204B MOT-135 представляет собой четырехпроводный двухступенчатый шаговый двигатель NEMA32
Имеет фиксирующий момент 122 кгс (11,96 Нм или 1694 унции). MOT-135 имеет диаметр переднего вала диаметром 15,875 мм со шпоночным пазом, а задний вал диаметром 12 мм. MOT-135 потребляет 6,2 А на фазу. Рекомендуемым драйвером для этих двигателей является SMC-033 (EM806). Этот драйвер обычно питается от источника питания 48 В постоянного тока. Проводка для комплектов, состоящих из шаговых приводов дифференциального ввода и одного источника питания, включающего все 3 двигателя и приводы. Применяется к наборам CNC-0421
Рекомендуемым драйвером для этих двигателей является SMC-033 (EM806). Этот драйвер обычно питается от источника питания 48 В постоянного тока. Проводка для комплектов, состоящих из шаговых приводов дифференциального ввода и одного источника питания, включающего все 3 двигателя и приводы. Применяется к наборам CNC-0421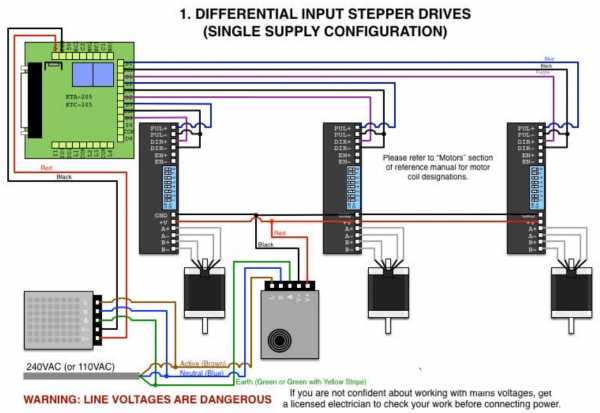 Подключение для комплектов, состоящих из шаговых приводов дифференциального ввода и с использованием конфигурации с двумя источниками питания. Применяется к наборам CNC-0441, CNC-0442, CNC-0443, CNC0461, CNC-0462, CNC-0463, CNC-0481, CNC-0482, CNC-0483 и CNC-050.
Подключение для комплектов, состоящих из шаговых приводов дифференциального ввода и с использованием конфигурации с двумя источниками питания. Применяется к наборам CNC-0441, CNC-0442, CNC-0443, CNC0461, CNC-0462, CNC-0463, CNC-0481, CNC-0482, CNC-0483 и CNC-050.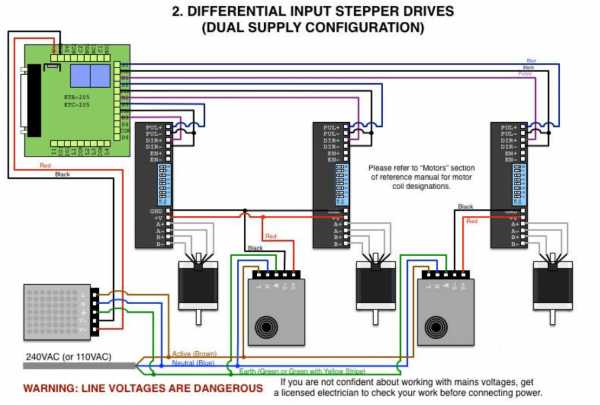 Подключение для комплектов, состоящих из шаговых приводов дифференциального ввода и использования независимого источника питания на ось. Применяется к наборам CNC-052 и CNC-054.
Подключение для комплектов, состоящих из шаговых приводов дифференциального ввода и использования независимого источника питания на ось. Применяется к наборам CNC-052 и CNC-054. Подключение для комплектов, состоящих из односторонних входных шаговых приводов и одного источника питания, включающего все 3 двигателя и приводы. Применяется к наборам CNC-040.
Подключение для комплектов, состоящих из односторонних входных шаговых приводов и одного источника питания, включающего все 3 двигателя и приводы. Применяется к наборам CNC-040. Проводка для комплектов, в которых используется драйвер Axis SMC-040 (MX3660). Применяется к наборам CNC-0422, CNC-0444, CNC-0464 и CNC-0484.
Проводка для комплектов, в которых используется драйвер Axis SMC-040 (MX3660). Применяется к наборам CNC-0422, CNC-0444, CNC-0464 и CNC-0484.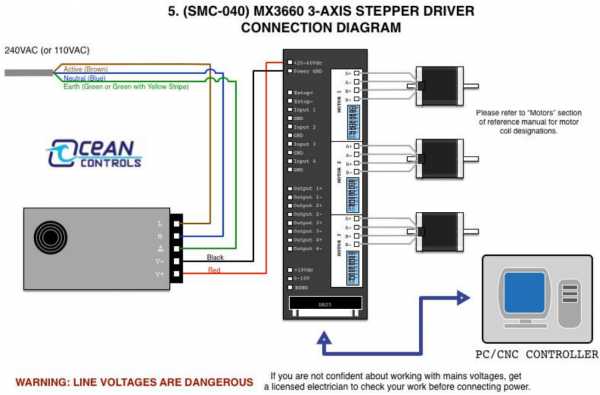 Обложки VFD, концевых выключателей и разъемов E-Stop для комплектов для SMC-040 (MX3660). Применяется к наборам CNC-0422, CNC-0444, CNC-0464 и CNC-0484
Обложки VFD, концевых выключателей и разъемов E-Stop для комплектов для SMC-040 (MX3660). Применяется к наборам CNC-0422, CNC-0444, CNC-0464 и CNC-0484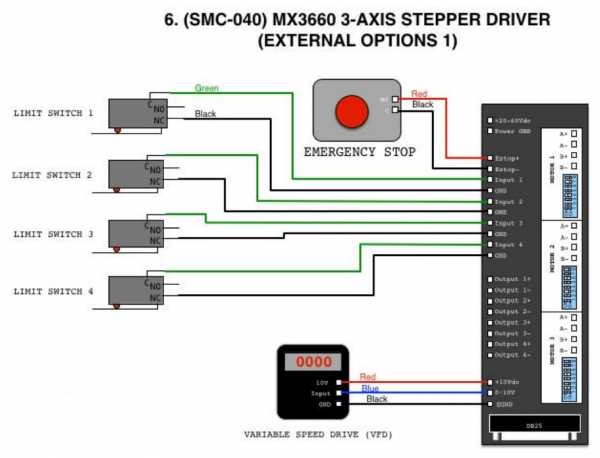 пример показывает выходную проводку для управления реле для комплектов с использованием SMC-040 (MX3660). Применяется к наборам CNC-0422, CNC-0444, CNC-0464 и CNC-0484.
пример показывает выходную проводку для управления реле для комплектов с использованием SMC-040 (MX3660). Применяется к наборам CNC-0422, CNC-0444, CNC-0464 и CNC-0484.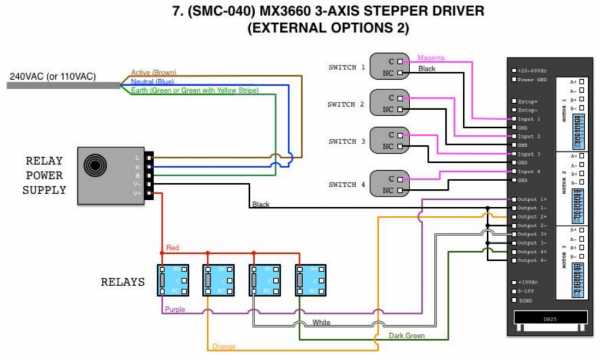 Подключение дополнительной 4-й оси с использованием независимого источника питания.
Подключение дополнительной 4-й оси с использованием независимого источника питания.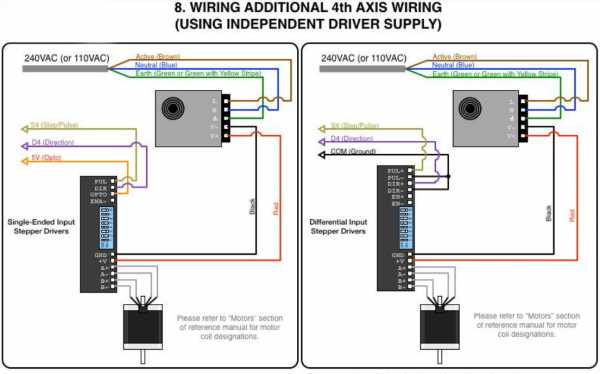 Подключение дополнительной 4-й оси с использованием существующего источника питания. Убедитесь, что существующий источник питания достаточно способен управлять шаговым приводом 4-й оси и шаговым двигателем. Повреждение может быть результатом неправильной настройки.
Подключение дополнительной 4-й оси с использованием существующего источника питания. Убедитесь, что существующий источник питания достаточно способен управлять шаговым приводом 4-й оси и шаговым двигателем. Повреждение может быть результатом неправильной настройки.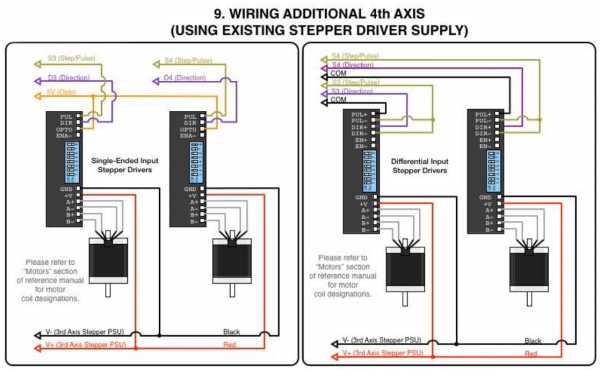 Обложка типичной проводки концевого выключателя для нашего контроллера CNC KTx-205.
Обложка типичной проводки концевого выключателя для нашего контроллера CNC KTx-205.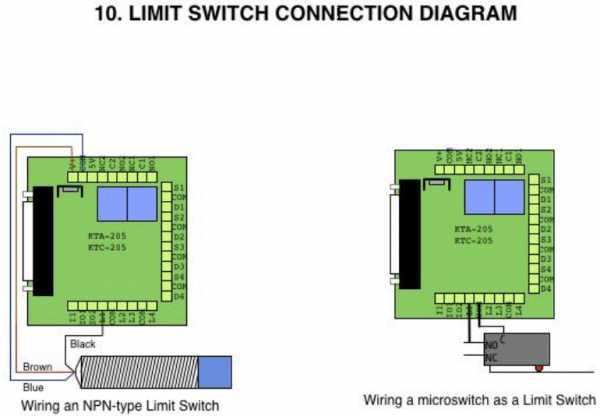 Подключение для адаптации 2 шаговых двигателей к одной оси. Рекомендуется для осей более 1,5 м
Подключение для адаптации 2 шаговых двигателей к одной оси. Рекомендуется для осей более 1,5 м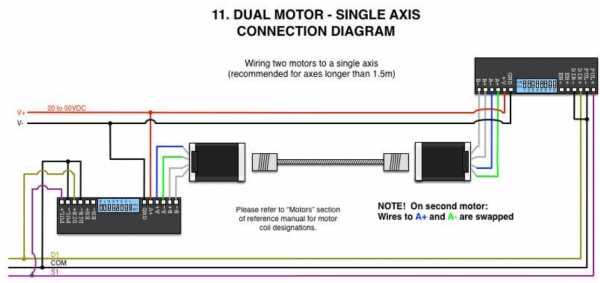 Что такое шаговый двигатель
Что такое шаговый двигатель tmdl.ru
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера.

Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.

Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Iпосл.= I/ √2, т.е.
Iпосл.= 0.707 *I.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпосл. = 1.4 * T.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.

Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
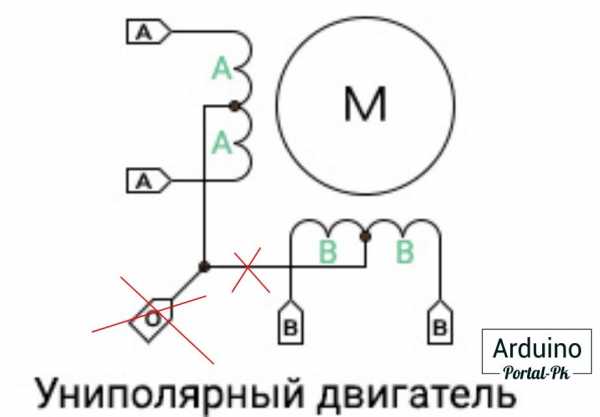
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
Подключение А - шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой.
|
Сопротивление обмотки, Ом |
Рабочее напряжение, В |
|
5-15 |
5 |
|
30-60 |
12 |
|
60-120 |
24 |
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Вернуться в раздел: Проекты на Arduino Дата публикации 15 июня , 2017portal-pk.ru
Крутим шаговый двигатель « схемопедия

Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе. Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя. Существует несколько алгоритмов управления питанием обмоток двигателя. Самым простым является полношаговое управление, когда в любой момент времени запитана только одна из половинок обмоток. Для наглядности накидал табличку показывающую последовательность включения обмоток:
Ротор при таком управлении принимает естественное положение относительно статора. Есть еще способ управления шаговиком в полношаговом режиме, когда одновременно запитываются две фазы, таким образом удается увеличить момент на валу на 40%. Главным недостатком полношагового управления являются аццкие вибрации двигателя и малая дискретность шага, равная паспортному значению.
Для того чтобы уменьшить вибрации и добится более плавного и точного вращения вала существует более продвинутый способ – управление в полушаговом режиме, алгоритм включения половинок обмоток приведен ниже:
При такой работе вал двигателя за один цикл совершает половину шага и фиксируется между двумя естественными состояниями равновесия. Таким образом дискретность поворота вала увеличивается в 2 раза. Есть еще способ увеличить дробленеи шага ротора двигателя – микрошаговое управление – когда обмотка не просто запитывается, а запитывается определенным током. И от отношения тока в соседних обмотках зависит положение ротора – чем больший ток течет в обмотке по отношению к соседней, тем ближе к ней смещается ротор и наоборот. Это позволяет увеличить дробление шага в десятки и сотни (!) раз.
С теорией немного разобрались, теперь нужно выбрать в каком режиме будет управляться двигатель. Полный шаг слишком убог и не эффективен, микрошаг сложен, да и нужен он в основном в управлении приводом высокоточного ЧПУ станка. Поэтому крутить будем в полушаге 🙂
Схема базируется на микроконтроллере attiny2313 и имеет две кнопки. При нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой – в другую. В качестве ключевых транзисторов выбраны КТ829, способные протащить через себя до 8 Ампер.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка.
Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Плата управления в сборе:


Красный светодиод загорается при нажатии одной из кнопок. Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Код в Bascom-AVR:
$regfile = “2313def.dat”$crystal = 4000000
Dim S As Byte ‘эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 ‘даем имена обработчикам внешних прерываний
On Int1 Knopka2
Config Portb = Output ‘конфигурируем порт на выход
Config Portd.5 = Output ‘конфигурируем ногу для подключения светодиода
Led Alias Portd.5 ‘присваиваем имя LED выводу 5 порта D
‘прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажата
Config Int0 = Low Level
Config Int1 = Low Level
‘разрешаем прерывания
Enable Interrupts
Enable Int0
Enable Int1
‘основной цикл программы, просто ждем прерывания
Do
Loop
Knopka1: ‘обработчик прерывания первой кнопки
Led = 1 ‘зажигаем светодиод
Incr S ‘увеличим номер шага
If S = 9 Then ‘максимально возможный номер шага = 8
S = 1
End If
Select Case S ‘выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000 ‘задержка между шагами
Led = 0 ‘гасим светодиод
Return
Knopka2: ‘обработчик прерывания второй кнопки
Led = 1 ‘зажигаем светодиод
Decr S ‘тут все тоже самое, только в обратном направлении
If S = 0 Then ‘минимально возможный номер шага = 1
S = 8
End If
Select Case S
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000
Led = 0 ‘гасим светодиод
Return
End
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
Взято с: avrproject.ru
Категория: AVR Метки: avrПоследние статьи
shemopedia.ru
Схемы управления шаговыми двигателями
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов - униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать центральный отвод.
Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения - биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов - униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать лишь две из четырех обмоток.
Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток - 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения

www.npoatom.ru
Биполярные и униполярные шаговые двигатели
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным.
Каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной системе управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов - униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать центральный отвод.
Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения - биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов - униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать лишь две из четырех обмоток.
Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток - 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
www.npoatom.ru






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






