Роторно–лопастные машины Конструктивные особенности. Схема механизма
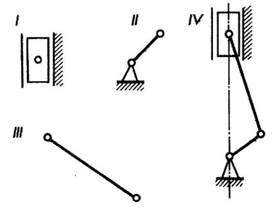
| Чтобы разобраться в устройстве механизма, следует обратить внимание не на отдельно взятые звенья, а на характер их соединения. Подвижное соединение двух звеньев в механизмах называется кинематической парой. При этом следует интересоваться лишь кинематическими возможностями пар (то есть возможностью звеньев совершать определенные движения) и не принимать во внимание конструктивные особенности. В кинематических парах звенья могут получать относительное, вращательное, поступательное или сложное движение. Соответственно и различают вращательные, поступательные и пары сложного движения. Например, зубчатые колеса образуют вращательную пару, ползун и направляющие устройства — поступательную пару, винт и гайка — пару сложного движения или винтовую пару. Соединения кинематических пар, в свою очередь, образуют кинематическую цепь. Для изображения механизмов и их составных частей — звеньев и кинематических пар — пользуются стандартными условными обозначениями. Неподвижность звеньев в парах всех видов отмечается на схемах подштриховкой. В качестве примера приведем последовательное изображение кинематической схемы двигателя внутреннего сгорания, конструкция которого показана на рис. 25. Рис. 25 Ведущим звеном, конечно, является поршень 1, так как движение ему сообщают внешние силы (давление газа или пара). Поршень совершает возвратно-поступательное движение относительно стенок неподвижного цилиндра 2. Ведомое звено — вал с кривошипом 4 — совершает вращательное движение. Между ведущим и ведомым звеньями находится промежуточное — шатун 3, совершающий плоскопараллельное движение. Поршень — это ползун, стенки цилиндра — направляющие, следовательно, эта кинематическая пара согласно стандартным условным изображениям изобразится как показано на рис. 26,I. Вал с кривошипом, совершающий вращательное движение относительно неподвижной опоры, изобразится как показано на рис. 26, II. Шатун — это стержень, концы которого связаны: один с ползуном, другой с кривошипом (рис, 26, III). Связав все звенья воедино, получим схематическое изображение механизма двигателя (рис. 26, IV).
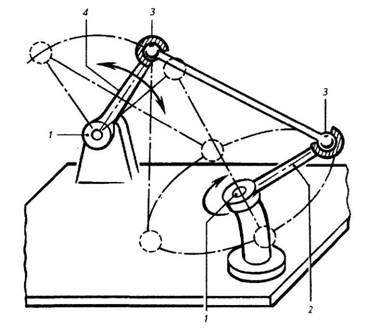
Рис. 26 В этом механизме — четыре звена: ползун, шатун, кривошип и одно неподвижное звено, обозначенное в двух местах подштриховкой. Однако следует обратить внимание на то, что с кинематической точки зрения — это одно звено, хотя реальных деталей может быть несколько (цилиндр, корпус и т. д.). Кинематических пар также четыре — три вращательных и одна поступательная. По структурно-конструктивным признакам различают механизмы плоские, у которых точки звеньев описывают траектории, лежащие в параллельных плоскостях, и пространственные, которые осуществляют взаимодействие между звеньями, расположенными в различных плоскостях. На рис. 27 приведена схема пространственного механизма, у которого звенья (стержни) сочленены двумя парами шарниров: шарнирами с одной осью 1 и сферическими шарнирами 3. Как видно из схемы, ведущее 2 и ведомое 4 звенья могут совершать вокруг шарниров 1 только вращательное движение, каждое в своей плоскости. Промежуточное звено, заключенное между двумя сферическими шарнирами 3, будет совершать сложные колебательные движения.
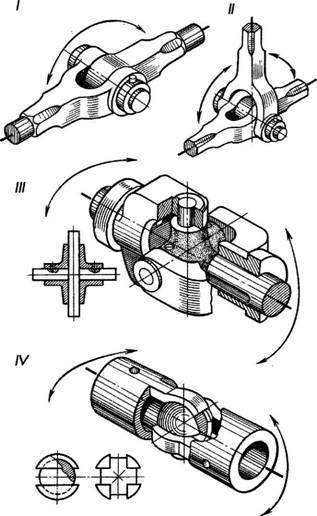
Рис. 27 Плоский механизм (рис. 28) отличается от пространственного тем, что все его звенья, в том числе и опоры, и исполнительного звена (поступательной пары 4), лежат в одной плоскости. Изображенный на схеме механизм содержит шесть вращательных пар 2— шарниров, каждое из которых представляет сочленение двух звеньев 1 и 3 с одной осью, допускающей вращательное их движение только в одной плоскости. Рис. 28 Звенья механизмов, в зависимости от их конструктивной особенности, могут быть неподвижны, совершать вращательные, поступательные и другие движения. Но в каждом механизме, преобразующем движение, имеются, как уже можно было увидеть из вышеприведенных примеров, шарниры с заданными наперед кинематическими свойствами. На рис. 29 изображены конструктивные разновидности шарнирных сочленений. Поз. I и II — шарнирные сочленения с одной осью двух и трех звеньев, которые могут совершать только круговые движения в одной плоскости. Поз. III и IV — шарнирные сочленения, которые допускают вращательные движения своих звеньев во взаимно-перпендикулярных плоскостях.
Рис. 29 При разработке новых механизмов конструктор прочерчивает несколько вариантов кинематических схем и из них выбирает оптимальный. На основании отобранной схемы производится техническая и технологическая разработка деталей и их конструктивное формообразование. Именно кинематическая схема, разработанная на стадии эскизного проектирования, является отправной конструкцией будущего механизма. |
cherch.ru
Кинематические и конструктивные схемы механизмов передвижения
Строительные машины и оборудование, справочник
Категория:
Мостовые перегружатели
Кинематические и конструктивные схемы механизмов передвиженияОсобенностью рассматриваемых перегружателей является выполнение ими подъемно-транспортных операций при неподвижном перегружателе. Перегружатель перемещается без груза при неподвижной тележке для занятия новой позиции. Перемещения перегружателей являются, таким образом, установочными, и механизм передвижения перегружателя включается сравнительно редко (4—8% от общего времени работы перегружателя).
Установочный характер передвижения и большая масса перегружателей определили относительно малые скорости их передвижения: 9—36 м/мин.
В современных конструкциях перегружателей применяется агрегатно-балансирная схема механизмов передвижения с индивидуальным приводом ходовых агрегатов.
Масса механизма передвижения современных перегружателей с индивидуальным приводом составляет 5—9% общей массы перегружателя, и только у перегружателей весьма большой массы она составляет 15—17%.
Каждый из ходовых балансирных агрегатов (тележек) механизма передвижения А, В, С и D представляет собой полностью унифицированный агрегат, включающий в себя ходовые колеса, систему балансирной подвески и приводную часть с электродвигателем.
Типичные схемы балансиров перегружателей с четырьмя колесами на одном рельсе показаны на рис. 1, а, б, в. Большая масса перегружателей предопределила применение четырех подкрановых рельсов.
У перегружателей значительной массы (2000—2400 т) применяется шестнадцатиколесная система балансиров при четырех или шести подкрановых рельсах (рис. 2, а, б). В последней схеме четырехрельсовая опора устанавливается на стороне большей консоли. Каждая приводная колесная пара имеет индивидуальный привод.
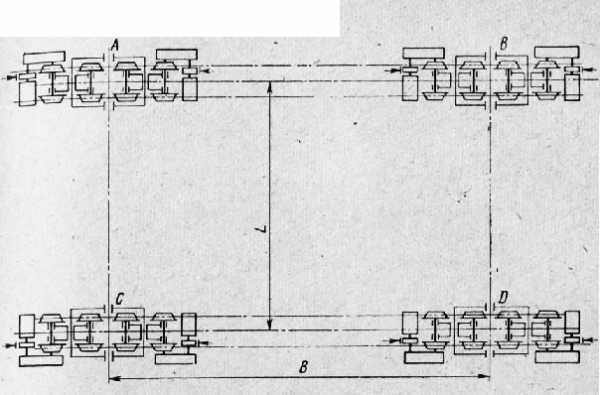
Рис. 1. Общая схема механизма передвижения перегружателя: А, В, С, D — ходовые балансирные агрегаты; I — гибкая опора; II — жесткая опора
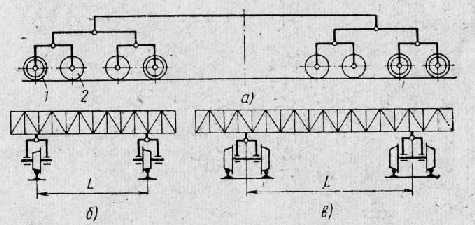
Рис. 2. Схема четырехколесных балансиров перегружателей:
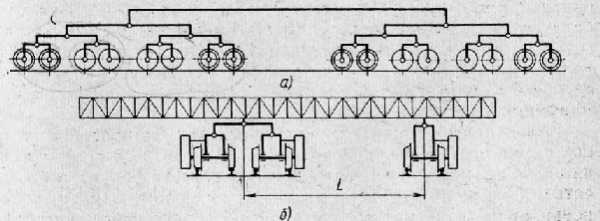
Рис. 3. Схема восьмиколесного балансира: а — вид сбоку; б — опирание на рельсы
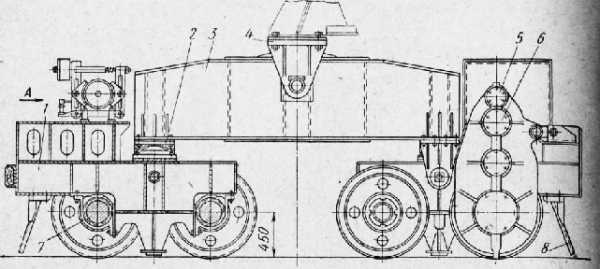
Рис. 4. Двухрельсовый балансирный агрегат перегружателя конструкции скмз
При 50%-ном числе приводных колес применяются две схемы привода колес: с установкой привода на каждом малом балансире и установкой на одном из малых балансиров двух двигателей, при этом второй малый балансир остается полностью неприводным. Первая схема позволяет получить более равномерное приложение тягового усилия, а конструкция балансиров получается более унифицированной.
Балансирный агрегат механизма передвижения перегружателя конструкции СКМЗ показан на рис. 4. Ходовые колеса приводятся во вращение от электродвигателя через редуктор с зубчатым колесом. Редуктор размещен на малом балансире. Установка привода на малом балансире позволяет передавать вращение на ходовые колеса независимо от положения балансира. У двухрельсовых балансирных агрегатов опоры балансиров делают сферическими, что позволяет балансиру занимать положение, соответствующее продольному и поперечному уклону рельсов. у однорельсовых агрегатов балансиры соединяются при помощи шарнира с цилиндрическим валиком. Таким же шарниром соединяется и главный балансир с опорой перегружателя. Расчистка подкрановых путей производится метельником.
Малые скорости и пути передвижения перегружателей позволяют применять в буксах валов и осей ходовых колес подшипники скольжения. Такая конструкция удобна при замене (выкатке) колесных пар, однако требует регулярного ухода за буксами. Поэтому в последних конструкциях перегружателей завода «Сибтяжмаш» в механизме передвижения применены подшипники качения (рис. 5), более удобные и надежные в эксплуатации.
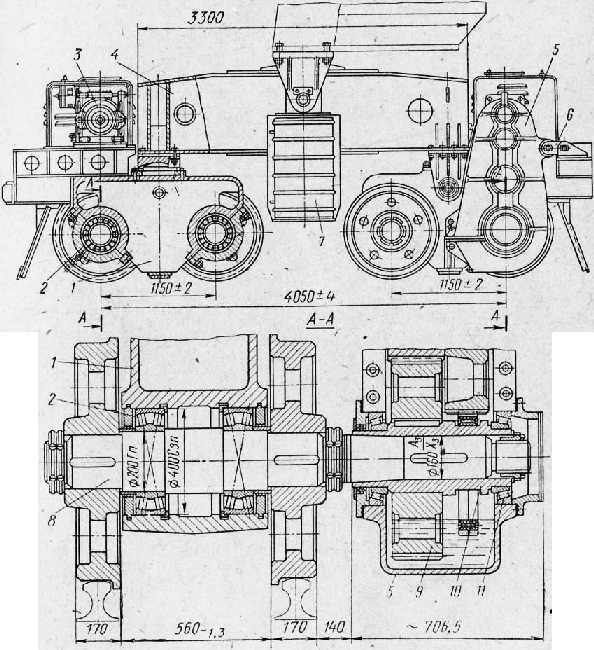
Рис. 5. Двухрельсовый балансирный агрегат перегружателя конструкции завода «Сибтяжмаш»: 1 — малый балансир; 2 — роликовый подшипник; 3 — двигатель; 4 — большой балансир; 5 — редуктор; 6 — серьга; 7 — установка для централизованной густой смазки; 8 — приводной вал; 9 — приводное колесо; 10 — втулка-гильза; 11 — конический роли
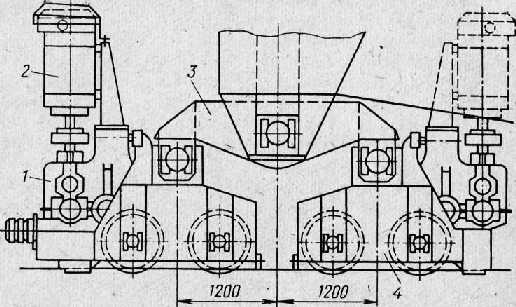
Рис. 6. Схема ходовых балансирных агрегатов механизма передвижения перегружателя конструкции фирмы МАН: 1 — редуктор; 2 — электродвигатель; 3 — главный балансир; 4 — малый балансир
Корпуса редукторов крепятся к малым балансирам с помощью шарнирных серег или лап, заходящих в направляющие балансира. Однако при соединении лапами в чугунных корпусах через 4—6 месяцев появляются трещины, и их приходится заменять стальными. При шарнирном соединении срок службы чугунных редукторов возрастает.
Двухрельсовый балансирный агрегат механизма передвижения перегружателя, изготовляемого фирмой МАН, показан на рис. 6. Агрегат имеет вертикальные электродвигатели, все колеса его приводные.
Ходовые колеса перегружателей делают цилиндрическими двухребордными или коническими одноребордными.
Колесно-рельсовый ход с коническими одноребордными колесами создает большую устойчивость передвижения в результате выравнивания перекоса перегружателя. Последнее достигается без участия или при незначительном участии реборд. Одноре-бордные колеса более просты в изготовлении и поэтому применяются более широко.
Читать далее: Ограничители перекоса перегружателей
Категория: - Мостовые перегружатели
Главная → Справочник → Статьи → Форум
stroy-technics.ru
Кинематические пары. Схемы механизмов
⇐ ПредыдущаяСтр 3 из 5Следующая ⇒
Кинематическая пара – подвижное соединение двух звеньев. Из теоретической механики известно, что твердое тело (рис. 3) в трехмерном пространстве имеет шесть степеней свободы: три поступательных и три вращательных.
Если одно звено соприкасается с другим звеном, то, относительно этого звена оно лишается одной или нескольких степеней свободы. В подвижном соединении одно звено относительно другого может иметь максимум пять степеней свободы, минимум – одну степень свободы. В теории механизмов, вместо принятого в теоретической механике словосочетания «степень свободы», часто используют термин «подвижность» Можно сказать, что в соединении двух звеньев, каждое из этих звеньев накладывает на другое определенное число ограничений относительного перемещения – так называемых связей. Класс кинематической пары определяется числом независимых связей, накладываемых одним звеном на другое в их подвижном соединении. Таким образом, кинематические пары подразделяются на пять классов, а подвижность кинематической пары определяется формулой:
, ,
где Sr – класс кинематической пары. Обозначение «r» в формуле указывает на то, что речь идет о связях и подвижностях одного звена относительно другого (лат. Relativus - относительный).
Кинематическая пара называется высшей, если контакт звеньев осуществляется по линии или в точке.
Кинематическая пара называется низшей, если звенья соприкасаются по поверхности.
Пример 1
Кинематическая пара шар-плоскость (рис. 4,а) имеет первый класс, так как контакт шара и плоскости в точке A дает только одну связь (Sr = 1). Подвижность пары . Данная кинематическая пара является высшей.
Пример 2
Поступательная кинематическая пара (рис. 4,б) имеет пятый класс ( ) и является одноподвижной. Контакт звеньев в данной кинематической паре осуществляется по поверхностям, поэтому пара – низшая.
В таблице 1 приведены графические и буквенные обозначения кинематических пар, которые используются при составлении схем механизмов.
Таблица 1
Структурная схема дает представление о структуре механизма (его звеньях и кинематических парах), на ней также указываются направления движений входных и выходных звеньев. Звенья на схеме нумеруются арабскими цифрами, причем стойка всегда обозначается цифрой «0». Проектирование механизма начинается с разработки его структурной схемы.
Кинематическая схема является более информативной: она содержит также сведения об основных геометрических размерах звеньев и выполняется в масштабе. Разработка кинематической схемы механизма осуществляется на основе его структурной схемы.
Классификация механизмов
Механизмы различаются по функциональному назначению, по конструктивному устройству, по расположению в пространстве, по наличию или отсутствию замкнутых кинематических контуров.
По функциональному назначению механизмы подразделяются на исполнительные, передаточные и программные.
· Исполнительные механизмы предназначены для приведения в движение рабочих органов машины в соответствии с выполняемым технологическим процессом.
· Передаточные механизмы служат для преобразования механической энергии двигателей в механическую энергию с параметрами, требуемыми для приведения в движение входных звеньев исполнительного механизма.
· Программные механизмы задают программу движения механической части машины.
Пример
Рассмотрим транспортную машину – автомобиль. Рабочими органами автомобиля являются колеса. Исполнительный механизм – шасси. Коробка передач – многоступенчатый передаточный механизм, необходимый для согласования работы двигателя и шасси в различных режимах движения машины. Двигатель автомобиля содержит газораспределительный механизм, который является программным (он управляет движением впускных и выпускных клапанов двигателя).
По конструктивному устройству различают рычажные, зубчатые, кулачковые и фрикционные механизмы.
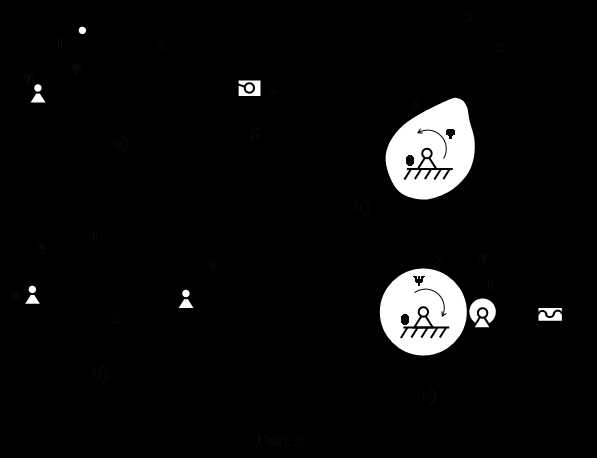
· Механизм, в котором все кинематические пары низшие, называется рычажным (рис. 5,а).
· В зубчатом механизме движение от одного звена к другому передается посредством зубчатого зацепления (рис. 5,б).
· Кулачковый механизм содержит звено со сложным профилем, называемое кулачком (рис 5,в).
· Во фрикционном механизме движение от одного звена к другому передается за счет сил трения (рис. 5,г; звенья вспомогательного винтового механизма, предназначенного для поджатия колеса 1, не пронумерованы).
Механизмы также могут быть комбинированными: например, зубчато-рычажный или зубчато-фрикционный механизмы.
 |
По расположению в пространстве механизмы подразделяются на плоские и пространственные.
· Механизм называется плоским, если траектории точек всех его подвижных звеньев находятся в плоскостях, параллельных неподвижной плоскости. На рис. 5 показаны структурные схемы плоских механизмов.
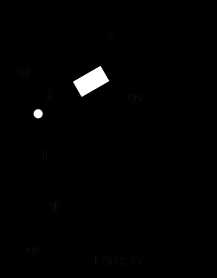
· Механизм называется пространственным, если траектории точек его подвижных звеньев лежат в непараллельных плоскостях. На рис. 6 приведена схема пространственного механизма – манипулятора, работающего в сферической системе координат.
 |
Механизм называется замкнутым, если каждое его звено образует, как минимум, две кинематические пары. Если есть хотя бы одно звено, образующее только одну кинематическую пару, механизм – разомкнутый.
Механизм называется одноконтурным, если он содержит один замкнутый кинематический контур. Если в механизме имеется более чем один замкнутый контур, то механизм – многоконтурный. На рис. 5 приведены схемы замкнутых одноконтурных механизмов; на рис. 6 – схема разомкнутого механизма, не имеющего замкнутых кинематических контуров.
Контрольные вопросы
1. Что называется кинематической парой?
2. Что называют подвижностями кинематической пары?
3. Как определяется класс кинематической пары?
4. Может ли кинематическая пара иметь класс выше пятого? Обоснуйте свой ответ.
5. Какие кинематические пары называются низшими? Высшими?
6. Чем отличается структурная схема механизма от его кинематической схемы?
7. Перечислите разновидности механизмов по функциональному назначению.
8. Какие механизмы называются рычажными?
9. Чем отличается плоский механизм от пространственного механизма?
10. Сформулируйте условие, в соответствии с которым механизм определяется как замкнутый.
11. Может ли разомкнутый механизм иметь замкнутые кинематические контуры? Обоснуйте свой ответ.
ЛЕКЦИЯ 3
Плоские четырехзвенные рычажные механизмы. Наименования звеньев рычажных механизмов. Степени свободы механизмов. Универсальные структурные формулы. Основные и местные подвижности в механизмах.
Читайте также:
lektsia.com
|
ekoteh.narod.ru
Лекция 1. Параметры механической системы электропривода
Электроприводы как электромеханические объекты управления современных промышленных агрегатов характеризуются весьма сложной механической частью, которая представляет собой многомассовую систему с упругими связями и зазорами в них. Кроме того, рабочие органы отдельных механизмов сложных технологических комплексов могут быть связаны между собой через обрабатываемый материал или изделие. Электрическая часть электроприводов может быть многодвигательной и выполняться с питанием электродвигателей как от общего, так и от индивидуальных преобразователей, что определяет их взаимное влияние друг на друга. В целом, работа современных систем автоматизированного электропривода характеризуется взаимосвязью электромагнитных процессов, механических явлений и технологических факторов, действием внешних (изменение моментов нагрузки, сил и моментов трения, напряжения питающей сети и др.) и внутренних (изменение электромеханических параметров привода) возмущений. Указанные обстоятельства должны быть учтены при математическом описании электромеханических объектов управления в целом и механической системы привода в частности.
1.1. Примеры кинематических схем производственных механизмов
Механическая система электропривода включает в себя большое количество кинематически связанных элементов и узлов: двигатель, муфты, валы, шестерни, винтовые, ременные и другие передачи, поступательно движущиеся массы и т.п. Каждая связь состоит из одной или нескольких механических, гидравлических, пневматических, электрических цепей, через которые передаются требуемые исполнительные движения. Простейшие механические цепи представляют собой отдельные пары: зубчатые, винтовые, червячные, ременные и т.п. Изображение кинематической цепи производственного механизма посредством условных обозначений ее элементов называется кинематической схемой механизма.
Ниже приведены упрощенные кинематические схемы некоторых исполнительных механизмов производственных агрегатов, где, упуская конструктивные подробности их реализации, основное внимание уделено принципиальным особенностям механической части электропривода.
Кинематическая схема механизма подачи металлорежущего станка
Схема приведена на рис. 1.1. Механизм подачи осуществляет преобразование вращательного движения в поступательное. Основными передачами механизма подачи являются винт – гайка и зубчатая передача, которая может и отсутствовать. Характерные особенности механизма подачи: податливость винта и его соединений, возможность наличия кинематических зазоров в передаче винт – гайка и зубчатой передаче.
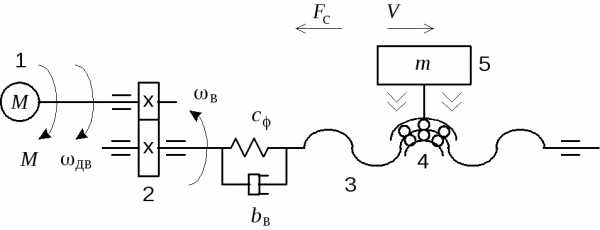
Рис. 1.1. Кинематическая схема механизма подачи металлорежущего станка: 1 – электродвигатель; 2 – зубчатая передача; 3 – винт; 4 – гайка; 5 – стол
Кинематическая схема механизма подъема
Схема приведена на рис. 1.2. Механизм подъема осуществляет преобразование вращательного движения в поступательное.
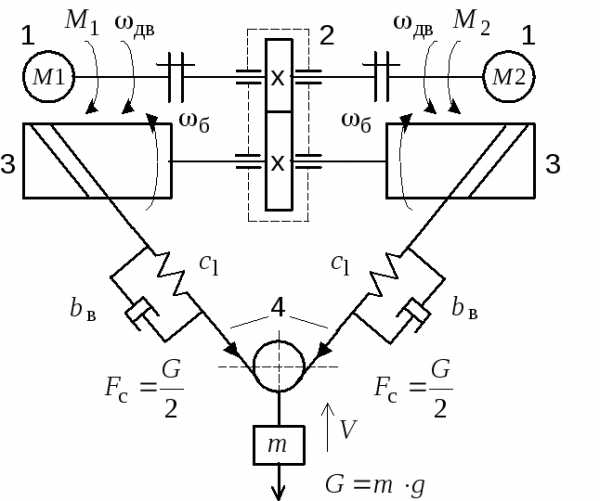
Рис. 1.2. Кинематическая схема механизма подъема: 1 – электродвигатель; 2 – редуктор; 3 – барабан лебедки; 4 – канат
Основными элементами механизма являются редуктор с несколькими зубчатыми передачами и подъемная лебедка, состоящая из барабана и канатов. Схема заправки канатов имеет варианты в зависимости от конкретного назначения механизма. Возможны варианты однодвигательного привода и двухдвигательного с общим и индивидуальными редукторами. Характерные особенности механизма подъема: податливость канатов, провисание канатов, наличие зазоров в зубчатых зацеплениях, возможность раскачивания груза. При жестком соединении валов приводные электродвигатели чаще всего включаются последовательно и питаются от общего преобразователя.
studfiles.net
Механизм планетарный: расчет, схема, синтез
Существуют всевозможные механические устройства. Одни из них знакомы нам с детства. Это, например, часы, велосипед, юла. О других мы узнаем, когда становимся старше. Это моторы машин, лебедки подъемных кранов и прочие. В каждом двигающемся механизме используется какая-либо система, заставляющая колесики крутиться, а машину работать. Одним из самых интересных и востребованных является планетарный механизм. Его суть состоит в том, что машину приводят в движение колесики или шестеренки, взаимодействующие между собой особым способом. Рассмотрим его подробнее.
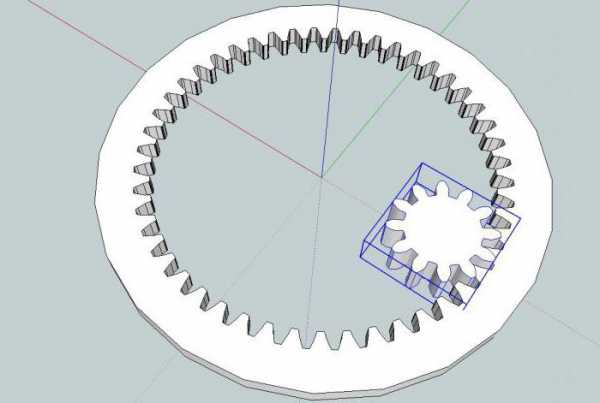
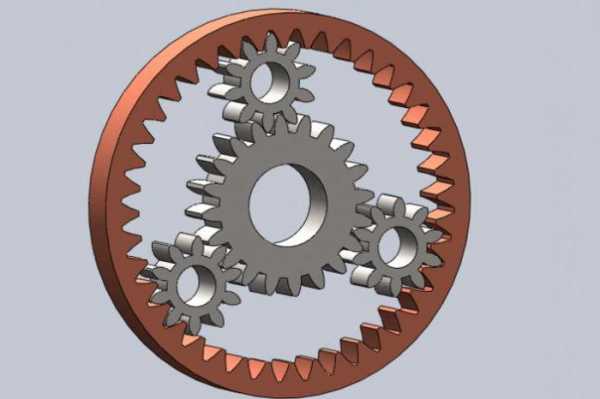
Общие сведения
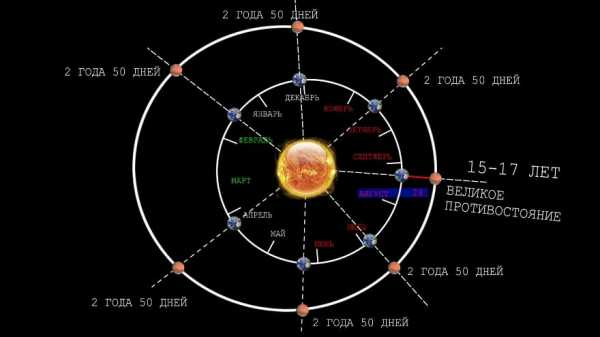
Планетарная передача и планетарный механизм так названы по аналогии с нашей Солнечной системой, которую условно можно представить так: в центре есть "солнце" (центральное колесо в механизме). Вокруг него движутся "планеты" (маленькие колесики или сателлиты). Все эти детали в планетарном механизме имеют наружные зубья. Условная солнечная система по ее диаметру имеет границу. Роль ее в планетарном механизме выполняет большое колесо или эпицикл. На нем тоже есть зубья, только внутренние. Большую работу в данной конструкции выполняет водило, представляющее собой рычажный механизм. Движение может осуществляться по-разному: либо солнце будет вращаться, либо эпицикл, но всегда совместно с сателлитами.
При работе планетарного механизма может использоваться и другая конструкция, например, два солнца, сателлиты и водило, но без эпицикла. Еще вариант - два эпицикла, но без солнца. Водило и сателлиты должны присутствовать всегда. В зависимости от количества колес и расположения осей их вращения в пространстве, конструкция может быть простой или сложной, плоской или пространственной.
Чтобы полностью понять, как работает такая система, необходимо разобраться в деталях.
Расположение элементов
Самая простая форма планетарного механизма включает в себя три комплекта передач с разной степенью свободы. Указанные выше сателлиты вращаются вокруг своих осей и одновременно вокруг солнца, остающегося на месте. Эпицикл связывает планетарный механизм снаружи и тоже вращается посредством поочередного сцепления зубьев (его и сателлитов). Такая конструкция способна в одной плоскости изменять крутящий момент (угловые скорости).
В простом планетарном механизме может вращаться солнце и сателлиты, а эпицентр оставаться фиксированным. В любом случае, угловые скорости всех составляющих не хаотичны, а имеют линейную зависимость друг от друга. По мере поворота носителя, обеспечивается низкоскоростной выход с высоким крутящим моментом.
То есть суть планетарной передачи заключается в том, что такая конструкция способна изменять, раскладывать и складывать крутящий момент и проводимую угловую скорость. Вращательные движения при этом происходят в одной геометрической оси. Устанавливается необходимый элемент трансмиссии различных транспортных средств и механизмов.
Особенности структурных материалов и схем
Однако фиксированный компонент не всегда необходим. В дифференциальных системах каждый элемент вращается. Механизмы планетарные, подобные этому, включают в себя один выход, управляемый (управляющий) двумя входами. Например, дифференциал, который управляет осью в автомобиле, представляет собой подобную передачу.
Такие системы работают по тому же принципу, что и структуры с параллельным валом. Даже простая планетарная передача имеет два входа, закрепленная кольцевая шестерня представляет собой постоянный вход нулевой угловой скорости.
Детальное описание устройств
Смешанные планетарные конструкции могут иметь разное количество колес, а также различные передачи, посредством которых они соединяются. Наличие таких деталей значительно расширяет возможности механизма. Составные планетарные конструкции могут быть собраны так, чтобы вал несущей платформы двигался с высокой скоростью. В результате некоторые проблемы с редукцией, солнечной шестерней и прочими могут быть устранены в процессе усовершенствования устройства.
Таким образом, как видно из приведенной информации, планетарный механизм работает по принципу передачи вращения между звеньями, являющимися центральными и подвижными. При этом сложные системы более востребованы, чем простые.
Варианты конфигурации
В планетарном механизме можно использовать колеса (шестерни) различной конфигурации. Подходят стандартные с прямыми зубьями, косозубые, червячные, шевронные. Тип зацепления на общий принцип работы планетарного механизма не будет влиять. Главное, чтобы совпадали оси вращения водила и центральных колес. А вот оси сателлитов могут располагаться в других плоскостях (скрещивающихся, параллельных, пересекающихся). Пример скрещивающихся - дифференциал межколесный, у которого зубчатые колеса имеют коническую форму. Пример скрещивающихся - дифференциал самоблокирующийся, у которого зацепление червячное (Torsen).
Простые и сложные устройства
Как уже отмечалось выше, схема планетарного механизма всегда включает водило и два центральных колеса. Сателлитов может быть сколько угодно. Это, так называемое, простое или элементарное устройство. В таких механизмах конструкции могут быть такими : "СВС", "СВЭ", "ЭВЭ", где:
- С - солнце.
- В - водило.
- Э - эпицентр.
Каждый такой набор колес + сателлиты называется планетарным рядом. При этом все колеса должны вращаться в одной плоскости. Простые механизмы бывают одно- и двухрядными. В различных технических приборах и машинах они используются редко. Примером может послужить планетарный механизм велосипеда. По такому принципу работает втулка, благодаря которой осуществляется движение. Ее конструкция создана по схеме "СВЭ". Сателлитов в не 4 штуки. При этом солнце жестко крепится к оси заднего колеса, а эпицентр является подвижным. Вращаться его вынуждает велосипедист, нажимающий на педали. При этом скорость передачи, следовательно, и скорость вращения могут меняться.
Гораздо чаще можно встретить сложные зубчатые планетарные механизмы. Их схемы могут быть самыми разными, что зависит от того, для чего предназначается та или иная конструкция. Как правило, сложные механизмы состоят из нескольких простых, созданных по общему правилу для планетарной передачи. Такие сложные системы бывают двух-, трех- или четырехрядные. Теоретически можно создавать конструкции и с большим числом рядов, но на практике такое не встречается.
Плоские и пространственные устройства
Некоторые думают, что простой планетарный механизм обязательно должен быть плоским. Это верно лишь отчасти. Сложные устройства тоже могут быть плоскими. Это значит, что планетарные ряды, сколько бы их ни использовалось в устройстве, находятся в одной либо в параллельных плоскостях. Пространственные механизмы имеют планетарные ряды в двух и более плоскостях. При этом самих колес может быть меньше, чем в первом варианте. Заметим, что плоский планетарный механизм такой же, как и пространственный. Разница состоит только в занимаемой устройством площади, то есть в компактности.
Степени свободы
Так называется совокупность координат вращения, позволяющая определить положение системы в пространстве в данный момент времени. Фактически каждый планетарный механизм имеет степеней свободы не менее двух. То есть угловые скорости вращения любого звена в таких устройствах не связаны линейно, как в других зубчатых передачах. Это позволяет получать на выходе угловые скорости не такие, какие есть на входе. Объяснить это можно тем, что в дифференциальной связи в планетарном механизме находятся три элемента в любом ряду, а остальные будут связаны с ним линейно, посредством какого-либо одного элемента ряда. Теоретически можно создать планетарные системы с тремя и более степенями свободы. Но на практике они оказываются неработоспособными.

Передаточное отношение планетарного механизма
Это важнейшая характеристика вращательного движения. Она позволяет определить, во сколько раз увеличился момент силы на валу ведомом по отношению к моменту вала ведущего. Определить передаточное отношение можно по формулам:
i = d2/d1 =Z2/Z1 = M2/M1 = W1/W2 = n1/n2, где:
- 1 - звено ведущее.
- 2 - звено ведомое.
- d1, d2 - диаметры первого и второго звеньев.
- Z1, Z2 - число зубьев.
- M1, M2 - крутящие моменты.
- W1 W2 - угловые скорости.
- n1 n2 - частота вращения.
Таким образом, при передаточном отношении выше единицы на ведомом валу увеличивается момент силы, а частота и угловая скорость уменьшаются. Это всегда нужно учитывать при создании конструкции, потому что передаточное отношение в планетарных механизмах зависит от того, сколько зубьев имеют колеса, и какой именно элемент ряда является ведущим.
Область применения
В современном мире существует множество различных машин. Многие из них работают с помощью планетарных механизмов.
Они используются в автомобильных дифференциалах, планетарных редукторах, в кинематических схемах сложных станков, в редукторах воздушных двигателей самолетов, в велосипедах, в комбайнах и тракторах, в танках и другой военной технике. По принципам планетарной передачи работают многие коробки передач, в приводах электрогенераторов. Рассмотрим еще одну такую систему.
Планетарный механизм поворота
Данная конструкция находит применение в некоторых тракторах, машинах на гусеничном ходу и танках. Простая схема устройства показана на рисунке ниже. 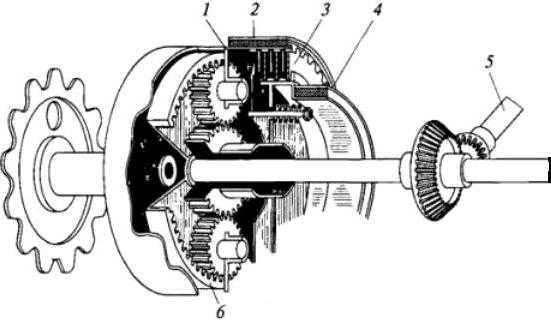 Принцип работы планетарного механизма поворота такой: водило (позиция 1) связано с барабаном тормоза (2) и ведущим колесом, расположенным в гусенице. Эпицикл (6) связан с валом передачи (позиция 5). Солнце (8) связано с диском фрикциона (3) и барабаном тормоза поворота (4). При включении блокировочного фрикциона и выключении ленточных тормозов сателлиты вращаться не будут. Они станут подобны рычагам, так как посредством зубьев связаны с солнцем (8) и эпициклом (6). Поэтому вынуждают их и водило одновременно вращаться вокруг общей оси. При этом угловая скорость одинаковая.
Принцип работы планетарного механизма поворота такой: водило (позиция 1) связано с барабаном тормоза (2) и ведущим колесом, расположенным в гусенице. Эпицикл (6) связан с валом передачи (позиция 5). Солнце (8) связано с диском фрикциона (3) и барабаном тормоза поворота (4). При включении блокировочного фрикциона и выключении ленточных тормозов сателлиты вращаться не будут. Они станут подобны рычагам, так как посредством зубьев связаны с солнцем (8) и эпициклом (6). Поэтому вынуждают их и водило одновременно вращаться вокруг общей оси. При этом угловая скорость одинаковая.
При выключении блокировочного фрикциона и включении тормоза поворота солнце начнет останавливаться, а сателлиты начнут двигаться вокруг своих осей. Тем самым они создают момент на водиле и вращают ведущее колесо гусеницы.
Износ
Что касается срока службы и амортизации, то в линейных механизмах планетарных систем распределение нагрузки заметно среди основных компонентов.
Термическая и циклическая усталость могут повышаться в них за счет ограниченного распределения нагрузки и того факта, что планетарные передачи могут вращаться довольно быстро по их осям. Более того, при высоких скоростях и передаточных отношениях планетарного механизма, центробежные силы могут значительно увеличить величину движения. Также следует заметить, что по мере снижения точности производства и увеличения количества сателлитов тенденция к дисбалансу возрастает.
Эти устройства и их системы могут даже подвергнуться износу или амортизации. Некоторые конструкции будут чувствительны даже к небольшим дисбалансам и способны потребовать качественные и дорогие компоненты сборки. Точным расположением планетных штифтов вокруг оси солнечной шестерни может быть ключ.
Другие схемы планетарных механизмов, которые помогают балансировать нагрузки, включают использование плавающих подузлов или «мягких» креплений, чтобы обеспечить максимально долговечное движение солнца или эпицентра.

Основы синтеза планетарных устройств
Эти знания нужны при проектировании и создании узлов машин. Понятие «синтез планетарных механизмов» заключается в расчете числа зубьев в солнце, эпицентре и сателлитах. При этом необходимо соблюсти ряд условий:
- Передаточное отношение должно равняться заданному значению.
- Зацепление зубьев колес должно быть правильным.
- Необходимо обеспечить соосность входного вала и выходного.
- Требуется обеспечить соседство (сателлиты не должны мешать друг другу).
Также при проектировании нужно учитывать габариты будущей конструкции, ее массу и КПД.
Если задано передаточное число (n), то число зубьев на солнце (S) и на планетарных шестернях (P) должно удовлетворять равенству:
n = S/P
Если допустить, что число зубьев на эпицентре рано (А), то при заблокированном водиле должно быть соблюдено равенство:
n = -S/A
Если закреплен эпицентр, то будет верным следующее равенство:
n = 1+ A/S
Так производится расчет планетарного механизма.

Преимущества и недостатки
Существует несколько видов передачи, которые благополучно используются в различных устройствах. Планетарная среди них выделяется следующими достоинствами:
- Обеспечивается меньшая нагрузка на каждый зубец колес (и солнца, и эпицентра, и сателлитов) за счет того что нагрузка на них распределяется более равномерно. Это положительно влияет на срок службы конструкции.
- При той же мощности планетарный механизм имеет меньшие габариты и массу, чем при использовании других видов передачи.
- Возможность достигать большего передаточного числа с меньшим количеством колес.
- Обеспечение меньшего уровня шума.
Недостатки планетарных механизмов:
- Нужна повышенная точность при их изготовлении.
- Малый КПД при сравнительно большом передаточном отношении.
fb.ru
схема механизма - это... Что такое схема механизма?
схема механизмаdiagram of a mechanism
Шифр IFToMM: —
Теория механизмов и машин. Терминология: Учеб. пособие. - М.: Изд-во МГТУ им. Н.Э. Баумана. Н.И. Левитский, Ю.Я. Гуревич, В.Д. Плахтин и др.; Под ред. К.В. Фролова. . 2004.
- сферическое движение
- такт движения
Смотреть что такое "схема механизма" в других словарях:
структурная схема механизма — Схема механизма, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение … Политехнический терминологический толковый словарь
кинематическая схема механизма — Структурная схема механизма с указанием размеров звеньев, необходимых для кинематического анализа механизма. [Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно технической терминологии. 1984… … Справочник технического переводчика
кинематическая схема механизма — kinematic diagram of a mechanism Схема механизма, выполненная в масштабе. Шифр IFToMM: Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
структурная схема механизма — type diagram of a mechanism Безмасштабная схема механизма, предназначенная для исследования его структуры. Шифр IFToMM: 1.3.1 Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
динамическая схема механизма — Графическое изображение механизма с применением условных обозначений звеньев и кинематических пар и указанием размеров и других характеристик звеньев, необходимых для динамического анализа механизма … Политехнический терминологический толковый словарь
кинематическая схема механизма — Графическое изображение механизма с применением условных обозначений звеньев и кинематических пар и указанием размеров, необходимых для кинематического анализа механизма … Политехнический терминологический толковый словарь
динамическая модель механизма — dynamic model of a mechanism Схема механизма, необходимая для составления уравнений динамики. Шифр IFToMM: Раздел: ДИНАМИКА МЕХАНИЗМОВ … Теория механизмов и машин
КИНЕМАТИЧЕСКАЯ СХЕМА — схема, на к рой с помощью условных обозначений изображаются звенья механизма и кинематические пары с указанием размеров, необходимых для кинематич. анализа (см. Кинематика) … Большой энциклопедический политехнический словарь
Принципиальная кинематическая схема — Кинематическая схема револьверной головки токарного станка При … Википедия
РАСЧЁТНАЯ СХЕМА — условное изображение сооружения, механизма и т. п., принимаемое для выполнения их расчёта. Р. с. выбирается так, чтобы существенно упростить расчёт, не искажая в то же время действит. картины работы сооружения или механизма при воздействии внеш.… … Большой энциклопедический политехнический словарь
mechanism_machine.academic.ru






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






