
Как переделать асинхронный двигатель в генератор
Переделываем асинхронный двигатель под генератор для ветряка
Для того чтобы асинхронный двигатель стал генератором переменного тока надо чтобы внутри него образовывалось магнитное поле, это можно сделать путём размещения на роторе двигателя постоянных магнитов. Вся переделка и простая и сложная одновременно.
Сначало надо подобрать подходящий двигатель, который наиболее подойдёт для работы в качестве низкооборотистого генератора. Это многополюсные асинхронные двигатели, хорошо подходят 6-ти и 8-ми полюсные, низкооборотистые двигатели, с максимальными оборотами в режиме двигателя не более 1350об/м. Такие двигатели имеют наибольшее количество полюсов и зубцов на статоре.
Далее нужно разобрать двигатель и извлечь якорь-ротор, который надо сточить на станке до опредлённых размеров под наклеивание магнитов. Магниты неодимые, обычно клеят маленькие круглые магнитики. Сейчас я попробую расказать как и сколько магнитов клеить.
Сейчас я попробую расказать как и сколько магнитов клеить.
Для начала нужно узнать сколько у вашего мотора полюсов, но по обмотке это понять достаточно трудно без соответствующего опыта, поэтому количество полюсов лучше прочитать на маркировке двигателя, если она конечно имеется, хотя в большенстве случаев она имеется. Ниже приведён пример маркировки двигателя и расшифровка маркировки.
По марке двигателя. Для 3х фазных: Тип двигателя Мощность, кВт Напряжение, В Частота вращения, (синх.), об/мин КПД, % Масса, кг
>
Например: ДАФ3 400-6-10 УХЛ1 400 6000 600 93,7 4580
Расшифровка обозначения двигателя: Д — двигатель; А — асинхронный; Ф — с фазным ротором; 3 — закрытое исполнение; 400 — мощность, кВт; б — напряжение, кВ; 10 — число полюсов; УХЛ — климатическое исполнение; 1 — категория размещения.
Бывает так, что двигатели не нашего производства как на фото выше, и маркировка непонятна, или маркировка просто не читаема. Тогда остаётся один метод, это посчитать сколько у вас зубцов на статоре и сколько зубцов занимает одна катушка. Если наприер катушка занимает 4 зубца, а их всего 24, то ваш мотор шестиполюсной.
Если наприер катушка занимает 4 зубца, а их всего 24, то ваш мотор шестиполюсной.
Количество полюсов статора нужно знать для того, чтобы определиться с количеством полюсов при наклейке магнитов на ротор. Это количество обычно равное, то-есть если полюсов статора 6, то и магниты надо клееть с чередованием полюсов в количестве 6, SNSNSN.
Теперь, когда число полюсов известно надо рассчитать число магнитов для ротора. Для этого надо выссчитать длинну оружности ротора, по простой формуле 2nR где n=3,14. Тоесть 3,14 умножаем на 2 и на радис ротора, получается длинна окружности. Длее замеряем свой ротор по длинне железа, которое в алюминиевой оправке. После можно нарисовать полученную полосу с длинной и шириной, можно на компьютере и потом распечатать.
Терерь нужно определится с толщиной магнитов, она примерно равна 10-15% от диаметра ротора, например если ротор 60мм, то магниты нужны толщиной 5-7мм. Для этого магниты покупают обычно круглые. Если ротор примерно 6см вдиаметре, то магниты можно высотой 6-10 мм. Определившись какие магниты использовать, на шаблоне длинна которой равна длинне окрушности
Определившись какие магниты использовать, на шаблоне длинна которой равна длинне окрушности
Пример рассчёта магнитов для ротора, например диаметр ротора 60см, высчитываем длинну окружности =188см. Делим длинну на количество полюсов, в данном случае на 6, и получаем 6 секций, в каждой секции магниты вклеиваются одинаковым полюсом. Но это ещё не всё. Терепь надо высчитать сколько магнитов войдёт в один полюс, чтобы их ровно распределить по полюсу. Например ширина круглого магнита 1см,расстояние между магнитами около 2-3мм, значит 10мм +3=13мм.
Длинну окружности делим на 6 частей=31мм, это ширина одного полюса по длинне окружности ротора, а ширина полюса по железу, дапустим 60мм. Значит получается площаадь полюса 60 на 31 мм. Это получается 8 в 2 ряда магнитов на полюс с расстоянием между собой 5мм. В этом случае надо пересчитать количество магнитов, чтобы они как можно плотнее уместились на полюсе.
Сдесь пример на магнитах шириной 10мм, поэтому получается расстояние между ними 5мм. Если уменьшить диаметр магнитов например в 2 раза, то-есть 5мм, то они более плотно заполнят полюс вследствие чего увеличится магнитное поле от большего каличества общей массы магнитом . Таких магнитов(5мм) поместится уже 5 рядов , а в длинну 10, то-есть 50 магнитов на полюс, и общее количество на ротор 300шт.
Если уменьшить диаметр магнитов например в 2 раза, то-есть 5мм, то они более плотно заполнят полюс вследствие чего увеличится магнитное поле от большего каличества общей массы магнитом . Таких магнитов(5мм) поместится уже 5 рядов , а в длинну 10, то-есть 50 магнитов на полюс, и общее количество на ротор 300шт.
Для того чтобы уменьшить залипание шаблон нужно разметить так, чтобы смещение магнитов при наклейке было на ширину одного магнита, если ширина магнита 5мм, то и смещение на 5мм.
>
Теперь когда с магнитами опрделились нужно проточить ротор, чтобы поместились магниты. Если высота магнитов 6мм, то стачивается диамет на 12+1мм, 1мм это запас на кривезну рук. Магниты можно разместить на роторе двумя способами.
Первый способ это предвартельно делается оправка, в которой сврлятся отверстия под магниты по шаблону, после оправка одевается на ротор, и магниты вклеиваются в просверленые отверстия. На роторе после проточки нужно дополнительно сточить на глубину равную высоте магнитов разделительный алюминиевые полоски между железом. А полученные бороздки заполнить отожжоными опилками смешаные с эпоксидным клеем. Это значительно уведличит эффективность, опилки будут служить дополнительным магнитопроводом между железом ротора. Выборку можно сделать отрезной машинкой или на станке.
А полученные бороздки заполнить отожжоными опилками смешаные с эпоксидным клеем. Это значительно уведличит эффективность, опилки будут служить дополнительным магнитопроводом между железом ротора. Выборку можно сделать отрезной машинкой или на станке.
Оправка для наклейки магнитов делается так, проточеный вал оборачивают полеинтеленом, потом наматывают слой за слоем бинт, пропитанный эпоксидным клеем, после стачивают на станке под размер и снимают с ротора, наклеивают шоблон и сверлют отверстия под магниты.После девают оправку обратно на ротор и наклеивают магниты Клеют обычно на эпоксидный клей Ниже на фото два примера наклейки агнитов, первый пример на 2-х фотоэто наклейка магнитов с помощъю оправки, а второй на следующей странице прямо через шаблон.На первых двух фотографиях хорошо видно и я думаю понятно как клеются магниты.
>
>
На следующей странице продолжение. читать далее..,
Как сделать самодельный генератор из асинхронного двигателя
Для нужд строительства частного жилого дома или дачи домашнему мастеру может понадобиться автономный источник электрической энергии, который можно купить в магазине или собрать своими руками из доступных деталей.
Самодельный генератор способен работать от энергии бензинового, газового или дизельного топлива. Для этого его надо подключить к двигателю через амортизирующую муфту, обеспечивающую плавность вращения ротора.
Если позволяют местные природные условия, например, дуют частые ветры или близко расположен источник проточной воды, то можно создать ветряную или гидравлическую турбину и подключить ее к асинхронному трехфазному двигателю для выработки электроэнергии.
За счет подобного устройства у вас будет постоянно работающий альтернативный источник электричества. Он снизить потребление энергии от государственных сетей и позволить экономить на ее оплате.
В отдельных случаях допустимо использовать однофазное напряжение для вращения электрического двигателя и передачи им крутящего момента на самодельный генератор для создания собственной трехфазной симметричной сети.
Содержание статьи
Как подобрать асинхронный двигатель для генератора по конструкции и характеристикам
Технологические особенности
Основу самодельного генератора составляет асинхронный электродвигатель трехфазного тока с:
- фазным;
- или короткозамкнутым ротором.


Устройство статора
Магнитопроводы статора и ротора изготавливают из изолированных пластин электротехнической стали, в которых созданы пазы для размещения проводов обмотки.
Три отдельные обмотки статора могут быть соединены на заводе по схеме:
- звезды;
- или треугольника.
Их выводы подключают внутри клеммной коробки и соединяют перемычками. Сюда же монтируют кабель питания.
В отдельных случаях может выполняться подключение проводов и кабеля другими способами.
К каждой фазе асинхронного двигателя подводятся симметричные напряжения, сдвинутые по углу на треть окружности. Они формируют токи в обмотках.
Эти величины удобно выражать в векторной форме.
из автомобильного генератора и на неодимовых магнитах — как сделать лопасти самому для частного дома
Основа домашнего ветрогенератора
Тема изготовления и установки самодельных ветряных генераторов очень широко представлена в сети Интернет. Однако большая часть материала – это банальное описание принципов получения электрической энергии от природных источников.
Однако большая часть материала – это банальное описание принципов получения электрической энергии от природных источников.
Теоретическая методика устройства (установки) ветрогенераторов уже давно известна и вполне понятна. А вот как обстоят дела практически в бытовом секторе – вопрос, раскрытый далеко не полностью.
Чаще всего в качестве источника тока для самодельных домашних ветрогенераторов рекомендуют выбирать автомобильные генераторы или асинхронные двигатели переменного тока, дополненные неодимовыми магнитами.
НЕОДИМОВЫЙ
Процедура переделки асинхронного электродвигателя переменного тока под генератор для ветряка. Заключается в изготовлении «шубы» ротора из неодимовых магнитов. Крайне сложный и долговременный процесс
Однако оба варианта требуют существенной доработки, нередко сложной, дорогостоящей, отнимающей много сил и времени.
Куда проще и легче во всех отношениях установить электродвигатели, подобные тем, что выпускались прежде и выпускаются теперь фирмой Ametek (пример) и другими.
Для домашней ветрогенераторной установки подходят моторы постоянного тока напряжением 30 – 100 вольт. В режиме генератора от них можно получить примерно 50% от заявленного рабочего напряжения.
Следует отметить: при работе в режиме генерации электродвигатели постоянного тока требуется раскручивать до скорости выше номинальной.
При этом каждый отдельно взятый мотор из десятка одинаковых экземпляров, может показывать совершенно разные характеристики.
Поэтому оптимальный подбор электродвигателя к домашнему ветрогенератору логичен при следующих показателях:
- Высокий параметр рабочего напряжения.
- Низкий параметр RPM (угловая скорость вращения).
- Высокое значение рабочего тока.
Так, удачным под установку выглядит мотор производства фирмы Ametek с рабочим напряжением 36 вольт и угловой скоростью вращения — 325 об/мин.
Именно такой электродвигатель используется в конструкции ветрогенератора – установки, что описана ниже в качестве примера домашнего ветряка.
ЭЛЕКТРОМОТОР
Мотор постоянного тока для домашнего ветрогенератора. Оптимальный вариант из числа продуктов, изготовленных фирмой Ametek. Также удачно подходят подобные электродвигатели производства других фирм
Проверить эффективность любого похожего мотора несложно. Достаточно подключить к электрическим выводам обычную автомобильную лампу накаливания на 12 вольт и крутануть вал мотора рукой. При хороших технических показателях электродвигателя лампа обязательно зажжётся.
На что нужно обратить внимание?
- При выборе ветрогенератора для домашнего использования, нужно обратить внимание на коэффициент использования ветра и, конечно же, самое главное – это мощность. В хороших вариантах ветрогенераторов для дома, коэффициент достигает до 45%, что является очень продуктивным. Мощность же на домашних приспособлениях начинается от 300 Вт до 10 кВт (второго показателя с головой хватит на то, чтобы в вашем доме работали все электрические приборы).
- Очень важным аспектом при выборе ветряка для дома является его быстроходность. В стандартных версиях она колеблется от 5 до 7 единиц. К примеру, если вы выбрали ветряк с единицей быстроходности “5”,- то это значит, что при ветре 10 метров в секунду ваш пропеллер будет крутится со скоростью в 5 раз быстрее, то есть 50 метров в секунду.
Создаются как стандартные ветрогенераторы с горизонтальной осью вращения, так и вертикально-ориентированные, их винт представляет не вертикальную, а горизонтальную крыльчатку. При выборе второго устройства, не нужно ориентироваться на направление ветра, однако они сложнее в производстве, установке и эксплуатации, поэтому огромной популярностью они не пользуются.
От чего зависит эффективность работы:
- Конструкции определенного агрегата. От этого зависит многое, ведь у каждого ветряка свои особенности в сборке, поэтому и по производительности каждый из них будет отличатся. Многое зависит от размеров самого ветряка и легкости его лопастей. Не малую роль играет и сам генератор (сердце всей конструкции).
- Погодных условий местности, на которой установлен ветряк. Как и было сказано ранее, нет смысла устанавливать эту штуку на не ветряной местности. Установив его в условиях низкой ветрености, вы никакой пользы от него не получите.
 Многое зависит от размеров самого ветряка и легкости его лопастей. Не малую роль играет и сам генератор (сердце всей конструкции).
Многое зависит от размеров самого ветряка и легкости его лопастей. Не малую роль играет и сам генератор (сердце всей конструкции).Источник электричества
Как минимум 1 раз в год увеличиваются тарифы на услуги электроэнергии, зачастую — в несколько раз. Это бьет по карману граждан, зарплата которых не растет столь же стремительно. Домашние умельцы раньше прибегали к простому, но довольно небезопасному и незаконному способу экономии на электроэнергии. Они прикрепляли к поверхности расходомера неодимовый магнит, после чего тот приостанавливал работу счетчика.
Если указанная схема изначально работала слаженно, то в дальнейшем с ней возникали проблемы. Объяснялось это несколькими причинами:
- Контролеры стали чаще ходить по домам и проводить внеплановые проверки.
- На счётчики стали приклеивать особые стикеры, под воздействием которых стали темнеть магнитные поля. Соответственно, вычислить такого нарушителя не составляло проблемы.
- Стали выпускаться новые счётчики, которые не имели восприимчивости к магнитному полю. Вместо стандартных моделей появились электронные узлы.

Всё это подтолкнуло людей к поиску альтернативных источников электроэнергии, к примеру, ветрогенераторов. Если человек проживает в областях, где регулярно дуют ветры, такие приспос
Переделать асинхронный двигатель в генератор своими руками: какие материалы и инструменты нужны для этого
Как самостоятельно сделать генератор из асинхронного двигателя?
Генератор асинхронного или индукционного типа представляет собой особую разновидность устройств, использующую переменный ток и имеющую способность воспроизведения электроэнергии. Главной особенностью является совершение довольно быстрых поворотов, которые делает ротор, по скорости вращения этого элемента он в значительной степени превосходит синхронную разновидность.
Одним из главных преимуществ является возможность использования данного устройства без существенных преобразований схемы или длительного настраивания.
Однофазную разновидность индукционного генератора можно подключить путем подачи на него необходимого напряжения, для этого потребуется подсоединение его к источнику питания. Однако, ряд моделей производит самовозбуждение, эта способность позволяет им функционировать в режиме, независимом от каких-либо внешних источников.
Осуществляется это благодаря последовательному приведению конденсаторов в рабочее состояние.
Схема генератора из асинхронного двигателя
схема генератора на базе асинхронного двигателя
В фактически любой машине электрического типа, сконструированной по типу генератора, имеются 2 разные активные обмотки, без которых невозможно функционирование устройства:
- Обмотка возбуждения, которая находится на специальном якоре.
- Статорная обмотка, которая отвечает за образование электрического тока, данный процесс происходит внутри нее.

Для того, чтобы наглядно представить и точнее понять все процессы, происходящие во время функционирования генератора, наиболее оптимальным вариантом будет подробнее рассмотреть схему его работы:
- Напряжение, которое подается от аккумулятора или любого иного источника, создает магнитное поле в якорной обмотке.
- Вращение элементов устройства вместе с магнитным полем можно реализовать разными способами, в том числе и вручную.
- Магнитное поле, вращающееся с определенной скоростью, порождает электромагнитную индукцию, благодаря чему в обмотке появляется электрический ток.
- Подавляющее большинство используемых на сегодняшний день схем не имеет возможностей для обеспечения якорной обмотки напряжением, это связано с наличием в конструкции короткозамкнутого ротора. Поэтому, вне зависимости от скорости и времени вращения вала, питающие клеммы устройства все равно будут обесточены.

При переделывании двигателя в генератор, самостоятельное создание движущегося магнитного поля является одним из основных и обязательных условий.
Устройство генератора
Перед тем, как предпринимать какие-либо действия по переделыванию асинхронного двигателя в генератор, необходимо понять устройство данной машины, которое выглядит следующим образом:
- Статор, который оснащен сетевой обмоткой с 3 фазами, размещенной по его рабочей поверхности.
- Обмотка организована таким образом, что напоминает по своей форме звезду: 3 начальных элемента соединяются между собой, а 3 противоположных стороны соединены с контактными кольцами, которые не имеют никаких точек соприкосновений между собой.
- Контактные кольца имеют надежный крепеж к валу ротора.
- В конструкции имеются специальные щетки, которые не совершают никаких самостоятельных движений, но способствуют включению реостата с тремя фазами. Это позволяет осуществлять изменение параметров сопротивления обмотки, находящейся на роторе.
- Нередко, во внутреннем устройстве присутствует такой элемент, как автоматический короткозамыкатель, необходимый для того, чтобы закоротить обмотку и остановить реостат, находящийся в рабочем состоянии.
- Еще одним дополнительным элементом устройства генератора может являться специальное приспособление, которое разводит щетки и контактные кольца в тот момент, когда они проходят стадию замыкания. Подобная мера способствует значительному уменьшению потерь, отводимых на трение.
 Это позволяет осуществлять изменение параметров сопротивления обмотки, находящейся на роторе.
Это позволяет осуществлять изменение параметров сопротивления обмотки, находящейся на роторе.Изготовление генератора из двигателя
Фактически, любой асинхронный электродвигатель можно собственными руками переделать в устройство, функционирующее по типу генератора, который затем допускается использовать в быту. Для этой цели может подойти даже двигатель, взятый из стиральной машинки старого образца или любого иного бытового оборудования.
Чтобы данный процесс был благополучно реализован, рекомендуется придерживаться следующего алгоритма действий:
- Снять слой сердечника двигателя, благодаря чему будет образовано углубление в его структуре. Осуществить это можно на токарном станке, рекомендуется снять 2 мм. по всему сердечнику и проделать дополнительные отверстия с глубиной около 5 мм.
- Снять размеры с полученного ротора, после чего из жестяного материала изготовить шаблон в виде полосы, который будет соответствовать габаритам устройства.
- Установить в образовавшемся свободном пространстве неодимовые магниты, которые необходимо заранее приобрести. На каждый полюс потребуется не менее 8 магнитных элементов.
- Фиксацию магнитов можно осуществить при помощи универсального суперклея, но необходимо учитывать, что при приближении к поверхности ротора они будут менять свое положение, поэтому их необходимо крепко удерживать руками пока каждый элемент не приклеится. Дополнительно рекомендуется использовать во время этого процесса защитные очки, чтобы избежать попадания брызг клея в глаза.
- Обернуть ротор обычной бумагой и скотчем, который потребуется для ее фиксации.
 Осуществить это можно на токарном станке, рекомендуется снять 2 мм. по всему сердечнику и проделать дополнительные отверстия с глубиной около 5 мм.
Осуществить это можно на токарном станке, рекомендуется снять 2 мм. по всему сердечнику и проделать дополнительные отверстия с глубиной около 5 мм.
Ветрогенератор из асинхронного двигателя своими руками: пошаговые инструкции
Полезные приспособления /07-апр,2014,00;16 /
60464
Ранее мы уже рассматривали как сделать простой ветрогенератор, исходя из популярности даной темы, предлагаем создать ветрогенератор из асинхронного двигателя. Необходимо немного переделать электродвигатель, как это сделать читаем далее.
Как сделать ветрогенератор своими руками из асинхронного двигателя
Чтобы сделать генератор для ветрогенератор, мы воспользуемся асинхронным двигателем.
Чтобы изменить двигатель, надо проточить ротор для магнитов, приклеить магниты к ротору и залить эпоксидкой. Кроме того, статор надо перемотать проводом с большей толщиной, дабы понизить показатель напряжения, увеличить ток. Но двигатель мы решили оставить нетронутым, выполнить лишь переделку ротора. Мы воспользовались агрегатом трехфазного типа, мощность его составляет 1,32 киловатт.
Выполняется проточка ротора мотора на токарном станке. Отметим, что в случае данного ротора мы не пользовались гильзой, которая надевается обычно под магниты. Ее наличие объясняется необходимостью усилить магнитную индукцию, магнитами через гильзу замыкаются поля, не происходит рассеивания магнитного поля, все направляется в сторону статора. Данная система предполагает использование весьма сильных магнитов, размер которых составляет 7,6×6 миллиметров. Берется 160 штук, с их помощью обеспечивается достаточная электродвигательная сила и без гильзы.
Первоначально, прежде чем наклеивать магниты, ротор размечается на 4 полюса, выполняется расположение магнитов со скосом. У двигателя было четыре полюса, из-за того, что не происходило перематывания статора, должны присутствовать 5 магнитных полюсов. Выполняется чередование каждого полюса, «южного» и «северного». Полюсам необходимы определенные паузы, магниты здесь располагаются более плотно. После того, как мы разместили магниты, они заматывались с помощью скотча, фиксировались эпоксидкой.
Ротор залипал, ощущалась также проблема в процессе валового вращения. Мы внесли некоторые изменения, удалили магниты и смолу, после чего выполнили новое размещение элементов. При этом упор был сделан на большую равномерность при установке. Выполнив заливку, мы поняли, что залипание стало менее заметным, кроме того, напряжение в процессе вращения генаратора на одинаковых оборотах стало меньше, показатель тока чуть-чуть увеличился.
Мы собрали ветрогенератор и решили прикрепить к нему то или иное приспособление. Решено было прикрепить лампу на 60 ватт и 220 вольт, на оборотах от 800 до 1000 она накаливалась полностью. Кроме этого, чтобы проверить возможности, мы прикрепили лампочку, мощность которой составляет 1киловатт. Обеспечен был половинный уровень нагревания. При 800 оборотах в минуту уровень напряжения составлял 160 вольт. Помимо этого, мы попытались выполнить подключение кипятильник на 0,5 киловатт, очень быстро вода нагрелась.
Рассмотрим подробно винт. Материалом для лопастей выступала поливинилхлоридная труба, диаметр которой равен 160 миллимеров.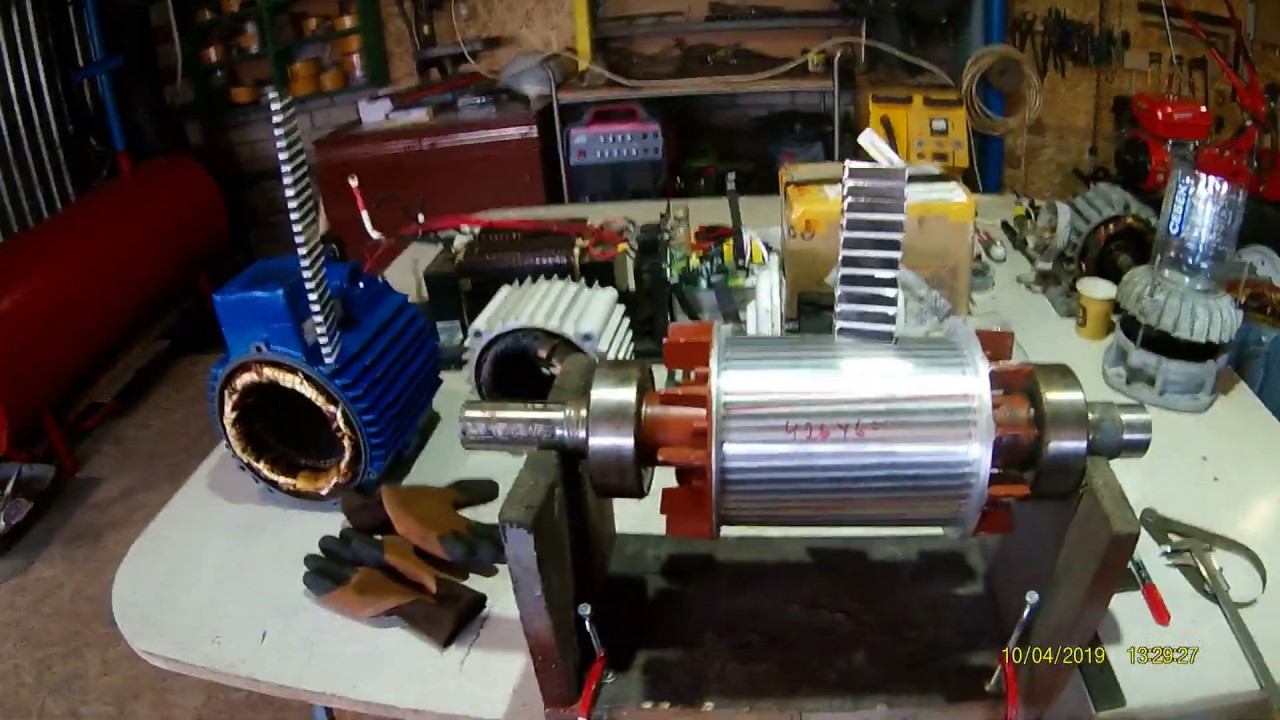 На фотографии можно увидеть винт, его диаметр составляет 1,7 метра, здесь представлена информация, исходя из которой, выполнялись лопасти.
На фотографии можно увидеть винт, его диаметр составляет 1,7 метра, здесь представлена информация, исходя из которой, выполнялись лопасти.
Несколько позже мы сделали стойку, у которой есть поворотная ось, позволяющая прикреплять хвост и генератор. У системы схема, при которой ветровая головка уходит от ветра с помощью хвостового складывания. Именно поэтому здесь есть определенное смещение от осевого центра системы, при заднем расположении штырька (шкворня, предназначенного для хвоста).
Мы прикрепили ветрогенератор своими руками к мачте, длина которой равняется девять метров. Генератором обеспечивалось напряжение холостого хода, которое достигало 80 вольт. Мы попытались выполнить подключение двухкиловаттного тенна, через определенный промежуток времени он нагрелся, соответственно, можно сделать вывод о наличии определенной мощности у ветряка.
Затем мы собрали специальный контроллер, после чего выполнили подключение с его помощью аккумулятора к зарядке. Обеспечен неплохой показатель по току, появился шум, подобный тому, как происходит при использовании зарядных приспособлений.
В соответствии с данными на электромоторе, показатели были равны 220-380 вольт, при силе тока от 6,2 до 3,6 ампер, соответственно, показатель сопротивления агрегата равняется 35,4ом треугольник/105,5 Ом звезда. В случае двенадцативольтного аккумулятора, заряжающегося по такой схеме, как «треугольник» (самый частый вариант), то получится, что при скорости ветра от 8 до 9 метров в секунду ток составляет около 1,9 ампер, что равняется всего-навсего 23 ватт в час.
Настолько существенное падение объясняется высоким уровнем сопротивления генератора, именно по этой причине выполняется перемотка статора проводом более существенной толщины, благодаря этому гарантируется уменьшение сопротивления агрегата, от чего зависит и показатель силы тока.
Надеемся наша инструкция как создать ветрогенератор для дома своими руками из асинхронного двигателя вам поможет сделать ветрогениратор.
Переделываем асинхронный двигатель под генератор для ветряка
Для того чтобы асинхронный двигатель стал генератором переменного тока надо чтобы внутри него образовывалось магнитное поле, это можно сделать путём размещения на роторе двигателя постоянных магнитов.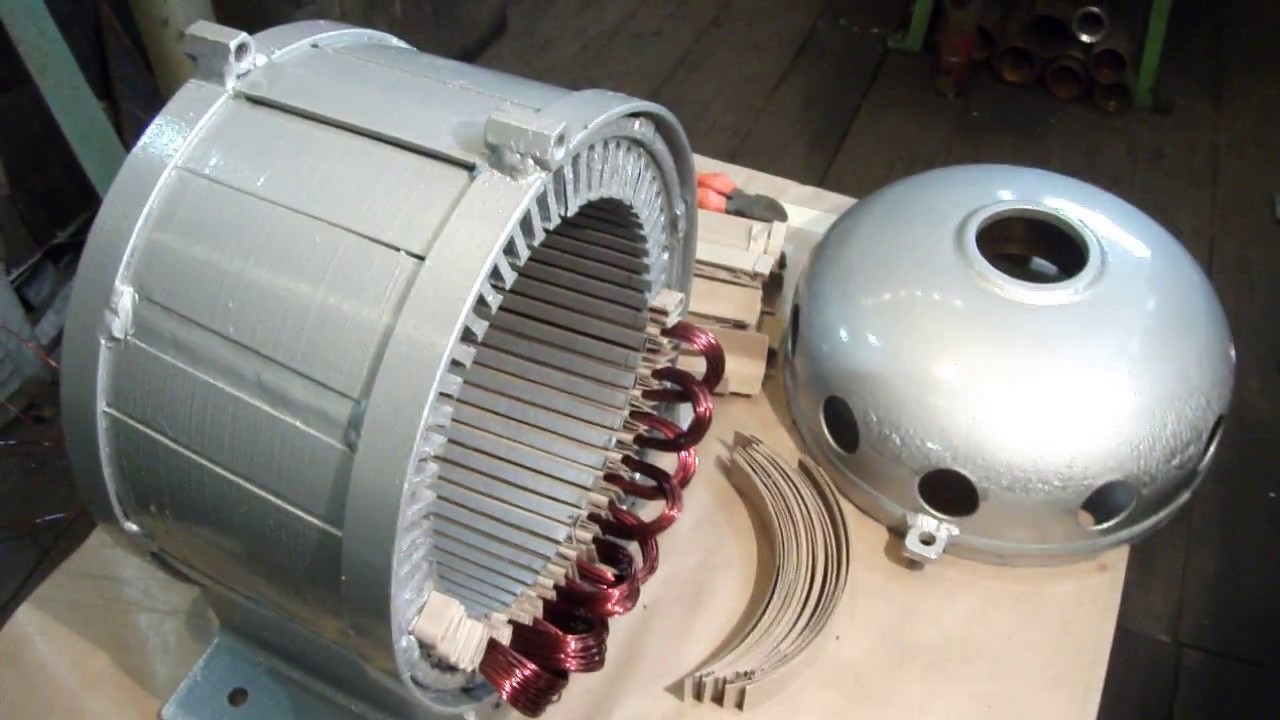 Вся переделка и простая и сложная одновременно.
Вся переделка и простая и сложная одновременно.
Сначала надо подобрать подходящий двигатель, который наиболее подойдёт для работы в качестве низкооборотистого генератора. Это многополюсные асинхронные двигатели, хорошо подходят 6-ти и 8-ми полюсные, низкооборотистые двигатели, с максимальными оборотами в режиме двигателя не более 1350об/м. Такие двигатели имеют наибольшее количество полюсов и зубцов на статоре.
Далее нужно разобрать двигатель и извлечь якорь-ротор, который надо сточить на станке до определённых размеров под наклеивание магнитов. Магниты необходимые, обычно клеят маленькие круглые магнитики. Сейчас я попробую рассказать как и сколько магнитов клеить.
Для начала нужно узнать сколько у вашего мотора полюсов, но по обмотке это понять достаточно трудно без соответствующего опыта, поэтому количество полюсов лучше прочитать на маркировке двигателя, если она конечно имеется, хотя в большинстве случаев она имеется. Ниже приведён пример маркировки двигателя и расшифровка маркировки.
По марке двигателя. Для 3х фазных: Тип двигателя Мощность, кВт Напряжение, В Частота вращения, (синх.), об/мин КПД, % Масса, кг
Например: ДАФ3 400-6-10 УХЛ1 400 6000 600 93,7 4580 Расшифровка обозначения двигателя: Д — двигатель; А — асинхронный; Ф — с фазным ротором; 3 — закрытое исполнение; 400 — мощность, кВт; б — напряжение, кВ; 10 — число полюсов; УХЛ — климатическое исполнение; 1 — категория размещения.
Бывает так, что двигатели не нашего производства как на фото выше, и маркировка непонятна, или маркировка просто нечитаемо. Тогда остаётся один метод, это посчитать сколько у вас зубцов на статоре и сколько зубцов занимает одна катушка. Если например катушка занимает 4 зубца, а их всего 24, то ваш мотор шестиполюсной.
Количество полюсов статора нужно знать для того, чтобы определиться с количеством полюсов при наклейке магнитов на ротор. Это количество обычно равное, то-есть если полюсов статора 6, то и магниты надо клеить с чередованием полюсов в количестве 6, SNSNSN.
Теперь, когда число полюсов известно надо рассчитать число магнитов для ротора. Для этого надо высчитать длину окружности ротора, по простой формуле 2nR где n=3,14. То есть 3,14 умножаем на 2 и на радис ротора, получается длинна окружности. Далее замеряем свой ротор по длине железа, которое в алюминиевой оправке. После можно нарисовать полученную полосу с длинной и шириной, можно на компьютере и потом распечатать.
Теперь нужно определится с толщиной магнитов, она примерно равна 10-15% от диаметра ротора, например если ротор 60мм, то магниты нужны толщиной 5-7мм. Для этого магниты покупают обычно круглые. Если ротор примерно 6см в диаметре, то магниты можно высотой 6-10 мм. Определившись какие магниты использовать, на шаблоне длинна которой равна длине окружности
Пример расчёта магнитов для ротора, например диаметр ротора 60см, высчитываем длину окружности =188см. Делим длину на количество полюсов, в данном случае на 6, и получаем 6 секций, в каждой секции магниты вклеиваются одинаковым полюсом. Но это ещё не всё. Теперь надо высчитать сколько магнитов войдёт в один полюс, чтобы их ровно распределить по полюсу. Например ширина круглого магнита 1см,расстояние между магнитами около 2-3мм, значит 10мм +3=13мм.
Но это ещё не всё. Теперь надо высчитать сколько магнитов войдёт в один полюс, чтобы их ровно распределить по полюсу. Например ширина круглого магнита 1см,расстояние между магнитами около 2-3мм, значит 10мм +3=13мм.
Длину окружности делим на 6 частей=31мм, это ширина одного полюса по длине окружности ротора, а ширина полюса по железу, допустим 60мм. Значит получается площадь полюса 60 на 31 мм. Это получается 8 в 2 ряда магнитов на полюс с расстоянием между собой 5мм. В этом случае надо пересчитать количество магнитов, чтобы они как можно плотнее уместились на полюсе.
Здесь пример на магнитах шириной 10мм, поэтому получается расстояние между ними 5мм. Если уменьшить диаметр магнитов например в 2 раза, то-есть 5мм, то они более плотно заполнят полюс вследствие чего увеличится магнитное поле от большего количества общей массы магнитом . Таких магнитов(5мм) поместится уже 5 рядов , а в длину 10, то-есть 50 магнитов на полюс, и общее количество на ротор 300шт.
Для того чтобы уменьшить залипание шаблон нужно разметить так, чтобы смещение магнитов при наклейке было на ширину одного магнита, если ширина магнита 5мм, то и смещение на 5мм.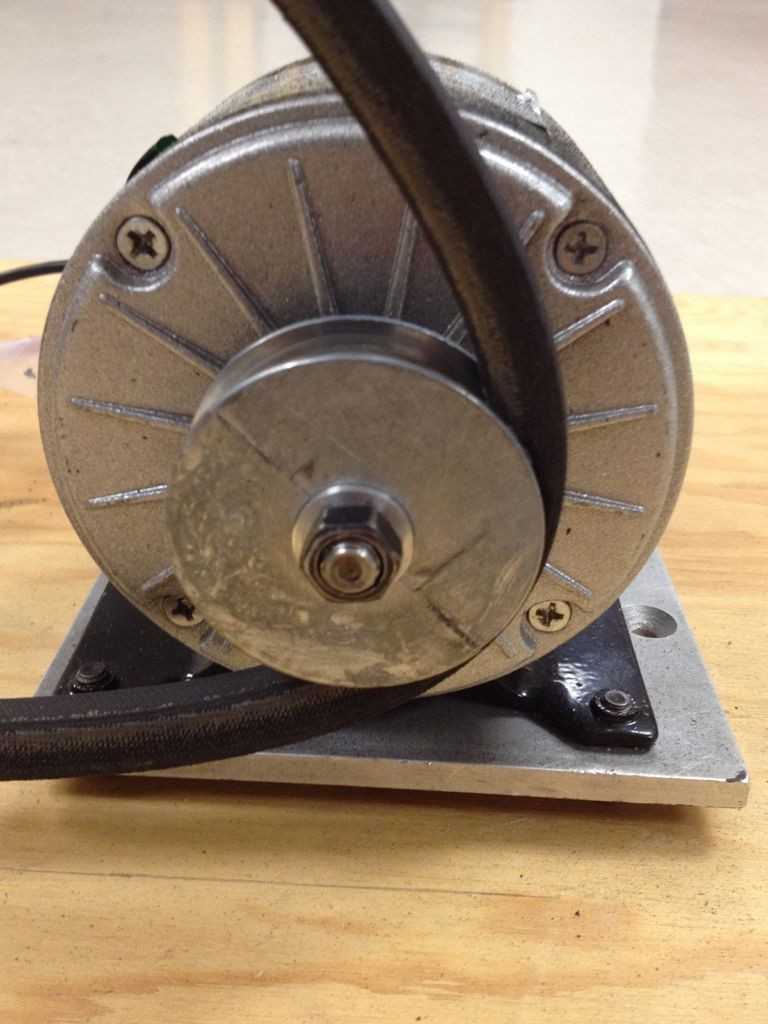
Теперь когда с магнитами определился нужно проточить ротор, чтобы поместились магниты. Если высота магнитов 6мм, то стачивается диаметр на 12+1мм, 1мм это запас на кривизну рук. Магниты можно разместить на роторе двумя способами.
Первый способ это предварительно делается оправка, в которой сверлятся отверстия под магниты по шаблону, после оправка одевается на ротор, и магниты вклеиваются в просверленные отверстия. На роторе после проточки нужно дополнительно сточить на глубину равную высоте магнитов разделительный алюминиевые полоски между железом. А полученные бороздки заполнить отожжоными опилками смешанные с эпоксидным клеем. Это значительно увеличит эффективность, опилки будут служить дополнительным магнитопроводом между железом ротора. Выборку можно сделать отрезной машинкой или на станке.
Оправка для наклейки магнитов делается так, проточенный вал оборачивают полиэтиленом, потом наматывают слой за слоем бинт, пропитанный эпоксидным клеем, после стачивают на станке под размер и снимают с ротора, наклеивают шаблон и сверлют отверстия под магниты.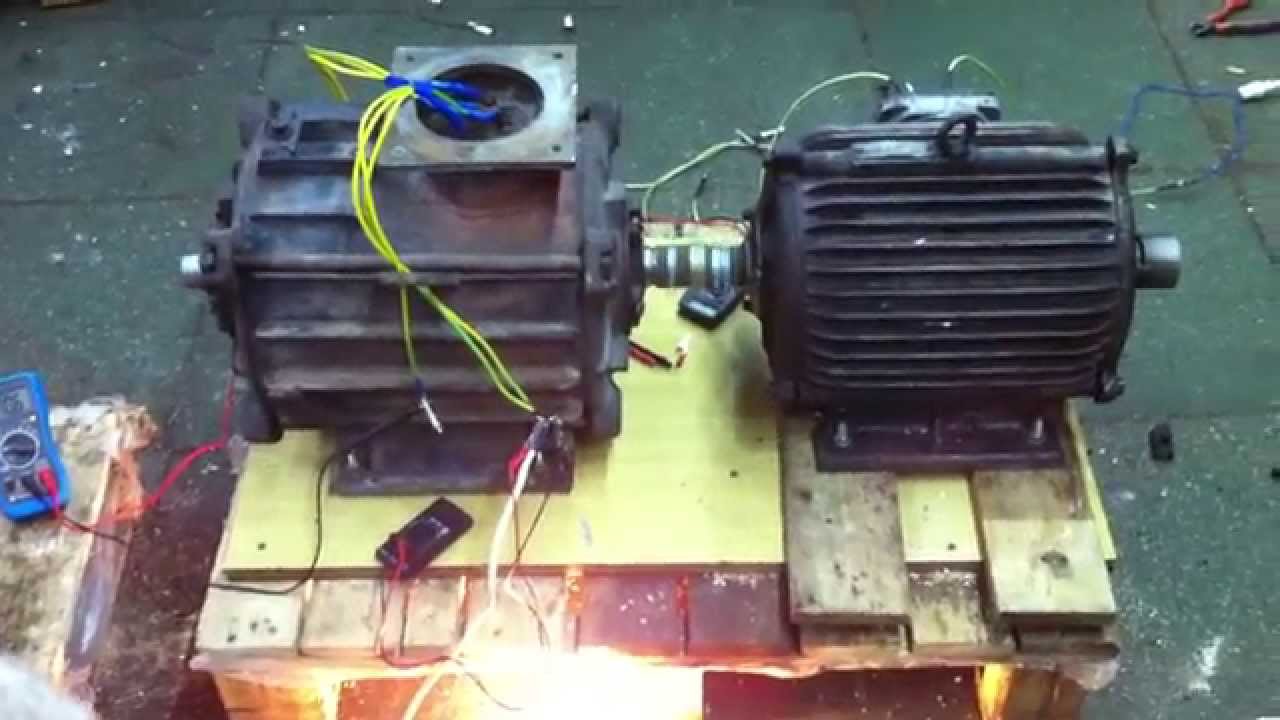 После девают оправку обратно на ротор и наклеивают магниты клеют обычно на эпоксидный клей Ниже на фото два примера наклейки магнитов, первый пример на 2-х фото это наклейка магнитов с помощью оправки, а второй на следующей странице прямо через шаблон.На первых двух фотографиях хорошо видно и я думаю понятно как клеются магниты.
После девают оправку обратно на ротор и наклеивают магниты клеют обычно на эпоксидный клей Ниже на фото два примера наклейки магнитов, первый пример на 2-х фото это наклейка магнитов с помощью оправки, а второй на следующей странице прямо через шаблон.На первых двух фотографиях хорошо видно и я думаю понятно как клеются магниты.
Электрогенератор | инструмент | Британника
Электрогенератор , также называемый динамо , любая машина, преобразующая механическую энергию в электричество для передачи и распределения по линиям электропередач бытовым, коммерческим и промышленным потребителям. Генераторы также производят электроэнергию, необходимую для автомобилей, самолетов, кораблей и поездов.
Механическая мощность электрического генератора обычно получается от вращающегося вала и равна крутящему моменту вала, умноженному на вращательную или угловую скорость.Механическая энергия может поступать из нескольких источников: гидротурбины на плотинах или водопадах; Ветряные турбины; паровые турбины, использующие пар, получаемый за счет тепла сгорания ископаемого топлива или ядерного деления; газовые турбины, сжигающие газ непосредственно в турбине; или бензиновые и дизельные двигатели. Конструкция и скорость генератора могут значительно различаться в зависимости от характеристик механического первичного двигателя.
Конструкция и скорость генератора могут значительно различаться в зависимости от характеристик механического первичного двигателя.
Практически все генераторы, используемые для электроснабжения сетей, вырабатывают переменный ток, полярность которого меняется на фиксированную частоту (обычно 50 или 60 циклов или двойное переключение в секунду).Поскольку несколько генераторов подключены к электросети, они должны работать на одной частоте для одновременной генерации. Поэтому они известны как синхронные генераторы или, в некоторых случаях, генераторы переменного тока.
Генераторы синхронные
Основная причина выбора переменного тока для электрических сетей заключается в том, что его постоянное изменение со временем позволяет использовать трансформаторы. Эти устройства преобразуют электрическую энергию при любом напряжении и токе, которые она генерирует, в высокое напряжение и низкий ток для передачи на большие расстояния, а затем преобразуют ее в низкое напряжение, подходящее для каждого отдельного потребителя (обычно 120 или 240 вольт для бытовых нужд).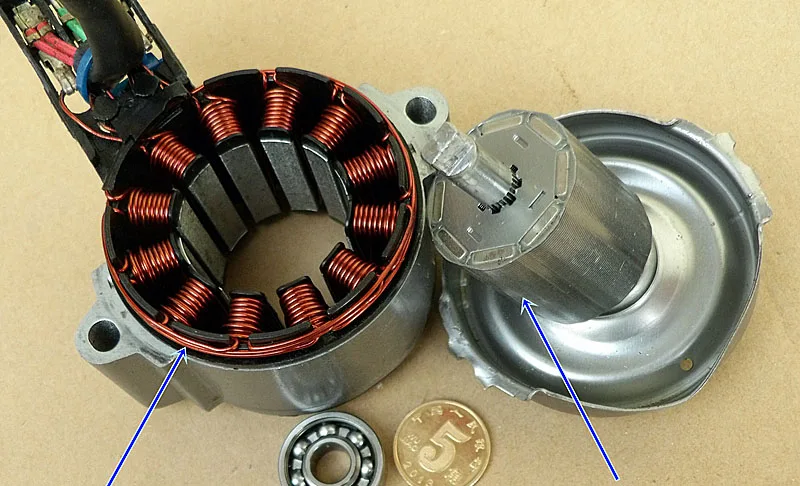 Конкретной формой используемого переменного тока является синусоидальная волна, которая имеет форму, показанную на рисунке 1. Она была выбрана, потому что это единственная повторяющаяся форма, для которой две волны, смещенные друг от друга во времени, могут быть добавлены или вычтены и имеют такая же форма возникает в результате. Тогда в идеале все напряжения и токи должны иметь синусоидальную форму. Синхронный генератор предназначен для получения этой формы с максимальной точностью. Это станет очевидно, когда ниже будут описаны основные компоненты и характеристики такого генератора.
Конкретной формой используемого переменного тока является синусоидальная волна, которая имеет форму, показанную на рисунке 1. Она была выбрана, потому что это единственная повторяющаяся форма, для которой две волны, смещенные друг от друга во времени, могут быть добавлены или вычтены и имеют такая же форма возникает в результате. Тогда в идеале все напряжения и токи должны иметь синусоидальную форму. Синхронный генератор предназначен для получения этой формы с максимальной точностью. Это станет очевидно, когда ниже будут описаны основные компоненты и характеристики такого генератора.
Синусоидальная волна.
Encyclopædia Britannica, Inc.
Получите эксклюзивный доступ к контенту нашего 1768 First Edition с подпиской.
Подпишитесь сегодня
Ротор
Элементарный синхронный генератор показан в разрезе на рис. 2. Центральный вал ротора соединен с механическим первичным двигателем. Магнитное поле создается проводниками или катушками, намотанными в прорези, вырезанные на поверхности цилиндрического железного ротора. Этот набор катушек, соединенных последовательно, известен как обмотка возбуждения.Положение катушек возбуждения таково, что направленная наружу или радиальная составляющая магнитного поля, создаваемого в воздушном зазоре к статору, приблизительно синусоидально распределяется по периферии ротора. На рисунке 2 плотность поля в воздушном зазоре максимальна снаружи вверху, максимальна внутрь внизу и равна нулю с двух сторон, что приблизительно соответствует синусоидальному распределению.
Этот набор катушек, соединенных последовательно, известен как обмотка возбуждения.Положение катушек возбуждения таково, что направленная наружу или радиальная составляющая магнитного поля, создаваемого в воздушном зазоре к статору, приблизительно синусоидально распределяется по периферии ротора. На рисунке 2 плотность поля в воздушном зазоре максимальна снаружи вверху, максимальна внутрь внизу и равна нулю с двух сторон, что приблизительно соответствует синусоидальному распределению.
Элементарный синхронный генератор.
Encyclopædia Britannica, Inc.
Статор элементарного генератора на рисунке 2 состоит из цилиндрического кольца из железа, обеспечивающего легкий путь для магнитного потока.В этом случае статор содержит только одну катушку, причем две стороны размещены в пазах в утюге, а концы соединены друг с другом изогнутыми проводниками по периферии статора. Катушка обычно состоит из нескольких витков.
Когда ротор вращается, в обмотке статора индуцируется напряжение. В любой момент величина напряжения пропорциональна скорости, с которой магнитное поле, окруженное катушкой, изменяется со временем, то есть скорости, с которой магнитное поле проходит через две стороны катушки.Таким образом, напряжение будет максимальным в одном направлении, когда ротор повернут на 90 ° из положения, показанного на рисунке 2, и будет максимальным в противоположном направлении на 180 ° позже. Форма волны напряжения будет примерно синусоидальной формы, показанной на рисунке 1.
Роторная конструкция генератора на рисунке 2 имеет два полюса: один для магнитного потока, направленного наружу, и соответствующий полюс для потока, направленного внутрь. Одна полная синусоида индуцируется в обмотке статора за каждый оборот ротора.Таким образом, частота электрического выходного сигнала, измеренная в герцах (циклах в секунду), равна скорости вращения ротора в оборотах в секунду. Чтобы обеспечить подачу электроэнергии с частотой 60 Гц, например, первичный двигатель и скорость ротора должны быть 60 оборотов в секунду или 3600 оборотов в минуту. Это удобная скорость для многих паровых и газовых турбин. Для очень больших турбин такая скорость может быть чрезмерной из-за механического напряжения. В этом случае ротор генератора сконструирован с четырьмя полюсами, разнесенными с интервалом 90 °.Напряжение, индуцированное в катушке статора, которая охватывает аналогичный угол 90 °, будет состоять из двух полных синусоид на оборот. Требуемая частота вращения ротора для частоты 60 Гц составляет 1800 оборотов в минуту. Для более низких скоростей, например, используемых в большинстве водяных турбин, можно использовать большее количество пар полюсов. Возможные значения частоты вращения ротора в оборотах в минуту равны 120 f / p , где f — частота, а p — количество полюсов.
Это удобная скорость для многих паровых и газовых турбин. Для очень больших турбин такая скорость может быть чрезмерной из-за механического напряжения. В этом случае ротор генератора сконструирован с четырьмя полюсами, разнесенными с интервалом 90 °.Напряжение, индуцированное в катушке статора, которая охватывает аналогичный угол 90 °, будет состоять из двух полных синусоид на оборот. Требуемая частота вращения ротора для частоты 60 Гц составляет 1800 оборотов в минуту. Для более низких скоростей, например, используемых в большинстве водяных турбин, можно использовать большее количество пар полюсов. Возможные значения частоты вращения ротора в оборотах в минуту равны 120 f / p , где f — частота, а p — количество полюсов.
Что такое индукционный генератор?
Индукционный генератор также известен как Асинхронный генератор . Индукционная машина иногда используется в качестве генератора. Изначально индукционный генератор или машина запускается как двигатель. При запуске машина потребляет отстающие реактивные вольт-амперы из питающей сети. Скорость машины увеличивается по сравнению с синхронной скоростью с помощью внешнего первичного двигателя. Скорость увеличивается в том же направлении, что и вращающееся поле, создаваемое обмотками статора.
При запуске машина потребляет отстающие реактивные вольт-амперы из питающей сети. Скорость машины увеличивается по сравнению с синхронной скоростью с помощью внешнего первичного двигателя. Скорость увеличивается в том же направлении, что и вращающееся поле, создаваемое обмотками статора.
Индукционная машина будет работать как индукционный генератор и начнет вырабатывать крутящий момент. Этот генерирующий крутящий момент противоположен направлению вращения ротора. В этом случае скольжение отрицательное, и индукционный генератор начинает подавать энергию в сеть.
Характеристики крутящего момента 3-фазной асинхронной машины для всех диапазонов скоростей приведены ниже.
В эквивалентной схеме асинхронного двигателя механическая нагрузка на валу заменена резистором с номиналом, указанным ниже.
В генераторе Induction Generato r скольжение (я) отрицательное и, следовательно, сопротивление нагрузки R mech также отрицательное. Это показывает, что сопротивление нагрузки не поглощает мощность, а начинает действовать как источник энергии. Он начинает подавать электрическую энергию в сеть, к которой он подключен.
Это показывает, что сопротивление нагрузки не поглощает мощность, а начинает действовать как источник энергии. Он начинает подавать электрическую энергию в сеть, к которой он подключен.
Мощность индукционного генератора зависит от следующих факторов, указанных ниже.
- Величина отрицательного скольжения.
- Скорость ротора или скорость вращения двигателя выше синхронной в том же направлении.
- Вращение двигателя, когда он работает как асинхронный двигатель.
Из характеристики «крутящий момент-скорость» асинхронного двигателя видно, что максимально возможный индуцированный крутящий момент возникает в генераторном режиме. Этот крутящий момент известен как Pushover Torque . Если крутящий момент становится больше, чем крутящий момент толкания, генератор будет превышать скорость.
Индукционный генератор не является генератором с самовозбуждением.Для создания вращающегося магнитного поля необходимо возбудить статор внешним многофазным источником. Это достигается при номинальном напряжении и частоте, и машина работает на скорости выше синхронной. Поскольку скорость асинхронного генератора отличается от синхронной скорости, он известен как асинхронный генератор .
Это достигается при номинальном напряжении и частоте, и машина работает на скорости выше синхронной. Поскольку скорость асинхронного генератора отличается от синхронной скорости, он известен как асинхронный генератор .
Из характеристической кривой видно, что рабочий диапазон асинхронного генератора ограничен максимальным значением толкающего момента, соответствующим скольжению на скорости OM, как показано на характеристической кривой крутящий момент-скорость.
Control Engineering | Понимание двигателей с постоянными магнитами
Автор: Кристофер Ящолт, Yaskawa America Inc.
31 января 2017 г.
Управление скоростью двигателей переменного тока в большинстве случаев осуществляется с помощью частотно-регулируемого привода (VFD). Хотя во многих сценариях используются частотно-регулируемые приводы с асинхронными двигателями с обмотками статора для создания вращающегося магнитного поля, они также могут обеспечить точное управление скоростью, используя датчики обратной связи по скорости или положению в качестве ссылки на частотно-регулируемый привод.
В некоторых ситуациях можно получить сравнительно точное регулирование скорости без использования датчиков обратной связи. Это стало возможным благодаря использованию двигателя с постоянными магнитами (PM) и процесса, называемого «методом ввода высокочастотного сигнала».
Машины индукционные
Асинхронная машина переменного тока (IM) также обычно называется двигателем переменного тока. Вращающееся поле создается обмоткой статора. Вращающееся поле индуцирует ток в стержнях ротора.Генерация тока требует разницы скоростей между ротором и магнитным полем. Взаимодействие между полем и током создает движущую силу. Таким образом, индукционные машины переменного тока являются преобладающими двигателями, управляемыми приводами с регулируемой скоростью.
Двигатели с постоянными магнитами
Двигатель с постоянными магнитами — это двигатель переменного тока, в котором используются магниты, встроенные в поверхность ротора двигателя или прикрепленные к ней. Магниты используются для создания постоянного магнитного потока двигателя, вместо того, чтобы требовать, чтобы поле статора создавало его путем соединения с ротором, как в случае с асинхронным двигателем.Четвертый двигатель, известный как двигатель с постоянными магнитами с линейным запуском (LSPM), объединяет характеристики обоих двигателей. Двигатель LSPM включает в себя магниты двигателя с постоянными магнитами внутри ротора и стержни ротора двигателя с короткозамкнутым ротором для максимального увеличения крутящего момента и эффективности (см. Таблицу 1).
Магниты используются для создания постоянного магнитного потока двигателя, вместо того, чтобы требовать, чтобы поле статора создавало его путем соединения с ротором, как в случае с асинхронным двигателем.Четвертый двигатель, известный как двигатель с постоянными магнитами с линейным запуском (LSPM), объединяет характеристики обоих двигателей. Двигатель LSPM включает в себя магниты двигателя с постоянными магнитами внутри ротора и стержни ротора двигателя с короткозамкнутым ротором для максимального увеличения крутящего момента и эффективности (см. Таблицу 1).
Поток, потокосцепление и магнитный поток
Чтобы понять принцип работы двигателей с постоянными магнитами, важно сначала понять концепции магнитного потока, потокосцепления и магнитного потока.
Flux: Прохождение тока через проводник создает магнитное поле.Поток определяет скорость потока собственности на единицу площади. Ток потока — это скорость протекания тока через заданную площадь поперечного сечения проводника.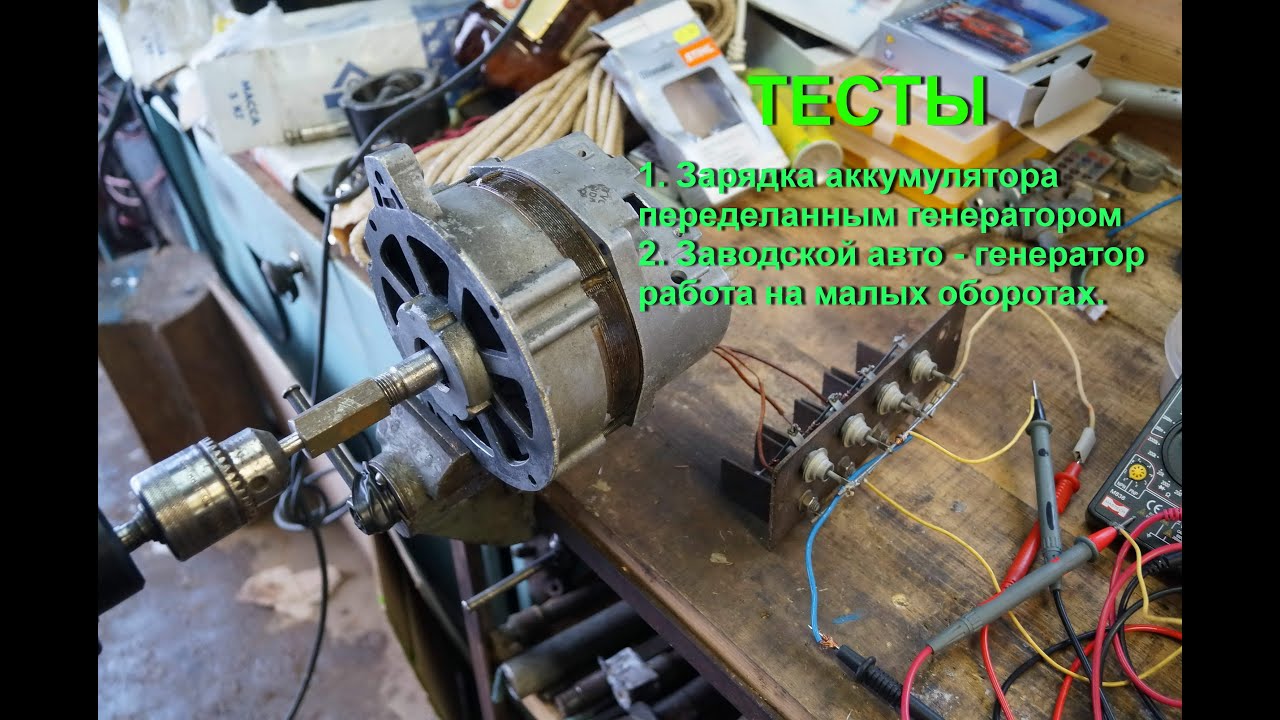
Потоковая связь: Потоковая связь возникает, когда магнитное поле взаимодействует с материалом, например, когда магнитное поле проходит через катушку с проволокой. Потоковая связь определяется количеством обмоток и магнитным потоком, где ϕ используется для обозначения мгновенного значения изменяющегося во времени потока. Потоковая связь определяется следующим уравнением:
Магнитный поток: Магнитный поток определяется как скорость магнитного поля, протекающего через заданную площадь поперечного сечения проводника.Поле магнитного потока создается постоянным магнитом внутри или на поверхности двигателя с постоянными магнитами.
Индуктор: Катушка индуктивности — это элемент схемы, который состоит из проводящего провода, обычно в форме катушки. Проводник, по которому проходит постоянный ток, будет генерировать постоянное магнитное поле. Можно продемонстрировать, что магнитное поле и вызвавший его ток линейно связаны. Изменение магнитного поля вызовет в соседнем проводнике напряжение, пропорциональное скорости изменения тока, создавшего магнитное поле.Напряжение в проводнике определяется по следующей формуле:
Изменение магнитного поля вызовет в соседнем проводнике напряжение, пропорциональное скорости изменения тока, создавшего магнитное поле.Напряжение в проводнике определяется по следующей формуле:
Индуктивность: Индуктивность (L) — это константа пропорциональности, которая определяет соотношение между напряжениями, индуцированными скоростью изменения тока во времени, создавшего магнитное поле. Проще говоря, индуктивность — это потокосцепление на единицу тока. Необходимо пояснить, что индуктивность — это пассивный элемент и чисто геометрическое свойство. Индуктивность измеряется в Генри (H) или Вебер-витках на ампер.
Ось d и ось q: С геометрической точки зрения оси «d» и «q» представляют собой однофазные представления потока, вносимого тремя отдельными синусоидальными фазовыми величинами при одинаковой угловой скорости. Ось d, также известная как прямая ось, является осью, по которой магнитный поток создается обмоткой возбуждения. Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению квадратурная ось всегда электрически опережает прямую ось на 90 градусов.Проще говоря, ось d является основным направлением потока, а ось q — основным направлением создания крутящего момента.
Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению квадратурная ось всегда электрически опережает прямую ось на 90 градусов.Проще говоря, ось d является основным направлением потока, а ось q — основным направлением создания крутящего момента.
Магнитная проницаемость: В электромагнетизме проницаемость — это мера способности материала поддерживать формирование магнитного поля внутри себя. Следовательно, это степень намагничивания, которую материал получает в ответ на приложенное магнитное поле.
Эквивалентная схема двигателя с постоянными магнитами: Двигатель с постоянными магнитами может быть представлен в нескольких различных моделях двигателей.Один из наиболее распространенных методов — модель двигателя d-q.
Индуктивность оси d и оси q двигателя с постоянными магнитами: Индуктивности оси d и оси q — это индуктивности, измеренные при прохождении потока магнитного потока через ротор по отношению к магнитному полюсу. Индуктивность по оси d — это индуктивность, измеренная, когда поток проходит через магнитные полюса. Индуктивность по оси q является мерой индуктивности при прохождении магнитного потока между магнитными полюсами.
Индуктивность по оси d — это индуктивность, измеренная, когда поток проходит через магнитные полюса. Индуктивность по оси q является мерой индуктивности при прохождении магнитного потока между магнитными полюсами.
В индукционной машине потокосцепление ротора будет одинаковым между осью d и осью q.Однако в машине с постоянным магнитом магнит уменьшает доступное железо для магнитной связи. Магнитная проницаемость близка к воздухопроницаемости. Следовательно, магнит можно рассматривать как воздушный зазор. Магнит находится на пути потока, когда он проходит через ось d. Путь потока, проходящего через ось q, не пересекает магнит. Следовательно, больше железа может быть связано с путем потока по оси q, что приводит к большей индуктивности. Двигатель со встроенным магнитом будет иметь большую индуктивность по оси q, чем индуктивность по оси d.Двигатель с магнитами для поверхностного монтажа будет иметь почти идентичные индуктивности по оси q и d, потому что магниты находятся вне ротора и не ограничивают количество железа, связанного полем статора.
Магнитная значимость: Заметность или значимость — это состояние или качество, благодаря которым что-то выделяется по сравнению со своими соседями. Магнитная яркость описывает соотношение между индуктивностью основного потока ротора (ось d) и индуктивностью, создающей основной крутящий момент (ось q).Магнитная яркость изменяется в зависимости от положения ротора по отношению к полю статора, где максимальная заметность возникает при 90 электрических градусах от оси главного потока (ось d) (см. Рисунок 1).
Ток возбуждения: Ток возбуждения — это «ток в обмотках статора, необходимый для создания магнитного потока в сердечнике ротора». Машины с постоянными магнитами не требуют тока возбуждения в обмотке статора, потому что магниты двигателя с постоянными магнитами уже создают постоянное магнитное поле.
Вторичный ток: Вторичный ток, иначе известный как «ток, создающий крутящий момент», — это ток, необходимый для создания крутящего момента двигателя. В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
Потребляемый ток: В отличие от усилителя и согласованного сервопривода, предназначенного для управления движением, обычный частотно-регулируемый привод не имеет информации о положении магнитного полюса ротора двигателя.Без знания положения магнитного полюса в статоре невозможно создать поле для максимального увеличения крутящего момента. Следовательно, частотно-регулируемый привод может подавать постоянное напряжение для фиксации магнитного поля в известном положении. Потребляемый ток, необходимый для втягивания ротора, называется «ток втягивания».
Высокочастотный впрыск: Высокочастотный впрыск — это метод инвертора, используемый для определения положения магнитного полюса двигателя с постоянными магнитами. Метод начинается с того, что инвертор подает высокочастотный сигнал низкого напряжения в двигатель на произвольной оси. Затем инвертор изменяет угол возбуждения и контролирует ток.
Затем инвертор изменяет угол возбуждения и контролирует ток.
В зависимости от угла впрыска изменяется импеданс ротора. Импеданс клеммы двигателя с внутренним постоянным магнитом (IPM) уменьшается, когда ось подачи высокочастотного сигнала и ось магнитного полюса (ось d) совмещены, то есть при 0 градусах. Максимальное сопротивление составляет ± 90 град. Используя эту характеристику, привод может определять положение ротора без импульсных энкодеров, подавая высокочастотное переменное напряжение / ток на двигатель IPM.Более того, метод подачи высокочастотного сигнала может использоваться для определения скорости в области низких скоростей, где обычно управление крутящим моментом при полной нагрузке очень затруднено, поскольку уровень напряжения обратной ЭДС двигателя слишком низкий.
Форма сигнала обратной ЭДС
Обратная ЭДС — это сокращение от обратной электродвижущей силы, но также известно как противодвижущая сила. Противоэлектродвижущая сила — это напряжение, которое возникает в электродвигателях при относительном движении обмоток статора и магнитного поля ротора. Геометрические свойства ротора будут определять форму сигнала обратной ЭДС. Эти формы сигналов могут быть синусоидальными, трапецеидальными, треугольными или чем-то средним.
Геометрические свойства ротора будут определять форму сигнала обратной ЭДС. Эти формы сигналов могут быть синусоидальными, трапецеидальными, треугольными или чем-то средним.
Как индукционные, так и ФЭ машины генерируют сигналы обратной ЭДС. В индукционной машине форма волны обратной ЭДС будет затухать по мере того, как остаточное поле ротора медленно спадает из-за отсутствия поля статора. Однако в машине с постоянным магнитом ротор создает собственное магнитное поле. Следовательно, напряжение может индуцироваться в обмотках статора всякий раз, когда ротор находится в движении.Напряжение обратной ЭДС линейно возрастает со скоростью и является решающим фактором при определении максимальной рабочей скорости.
Что такое крутящий момент машины с постоянным магнитом
Крутящий момент электрической машины можно разделить на две составляющие: магнитный момент и момент сопротивления. Момент сопротивления — это «сила, действующая на магнитный материал, которая стремится выровняться с основным магнитным потоком, чтобы минимизировать сопротивление».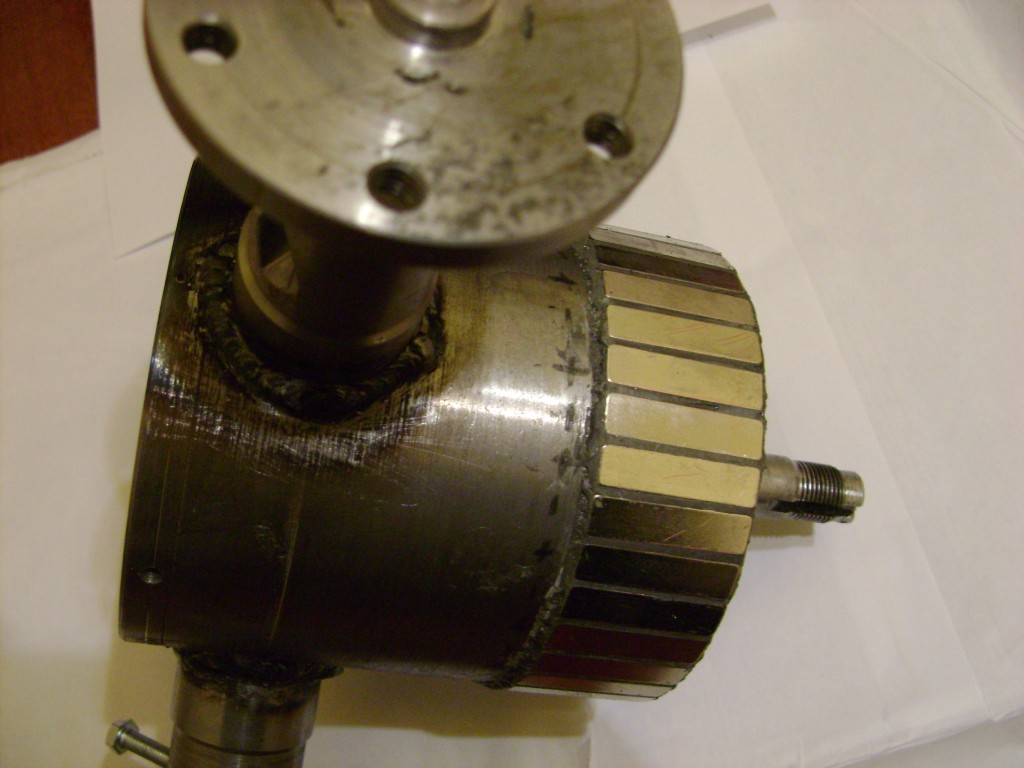 Другими словами, реактивный крутящий момент — это крутящий момент, создаваемый выравниванием вала ротора относительно магнитного поля статора.Магнитный крутящий момент — это «крутящий момент, создаваемый взаимодействием магнитного поля магнита и тока в обмотке статора».
Другими словами, реактивный крутящий момент — это крутящий момент, создаваемый выравниванием вала ротора относительно магнитного поля статора.Магнитный крутящий момент — это «крутящий момент, создаваемый взаимодействием магнитного поля магнита и тока в обмотке статора».
Момент сопротивления: Момент сопротивления относится к крутящему моменту, генерируемому при выравнивании ротора, который возникает, когда магнитное поле заставляет желаемый прямой поток от северного полюса статора к южному полюсу статора.
Магнитный момент: Постоянные магниты создают магнитное поле в роторе.Статор создает поле, которое взаимодействует с магнитным полем ротора. Изменение положения поля статора по отношению к полю ротора вызывает смещение ротора. Сдвиг из-за этого взаимодействия и есть магнитный момент.
SPM в сравнении с IPM
Двигатели с постоянными магнитами можно разделить на две основные категории: двигатели с поверхностными постоянными магнитами (SPM) и двигатели с внутренними постоянными магнитами (IPM) (см. Рисунок 3). Ни один из типов конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
Рисунок 3). Ни один из типов конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
У двигателей
SPM магниты прикреплены к внешней поверхности ротора. Из-за такого механического крепления их механическая прочность ниже, чем у двигателей IPM. Ослабленная механическая прочность ограничивает максимальную безопасную механическую скорость двигателя. Кроме того, эти двигатели обладают очень ограниченной магнитной яркостью (L d ≈ L q ). Значения индуктивности, измеренные на зажимах ротора, одинаковы независимо от положения ротора. Из-за почти единичного коэффициента выраженности конструкции двигателей SPM в значительной, если не полностью, зависят от магнитной составляющей крутящего момента для создания крутящего момента.
В двигателях
IPM постоянный магнит встроен в сам ротор. В отличие от своих собратьев SPM, расположение постоянных магнитов делает двигатели IPM очень механически прочными и пригодными для работы на очень высоких скоростях. Эти двигатели также характеризуются их относительно высоким коэффициентом магнитной яркости (L q > L d ). Благодаря своей магнитной значимости, двигатель IPM может создавать крутящий момент, используя преимущества как магнитного, так и реактивного крутящего момента двигателя (см. Рисунок 4).
Эти двигатели также характеризуются их относительно высоким коэффициентом магнитной яркости (L q > L d ). Благодаря своей магнитной значимости, двигатель IPM может создавать крутящий момент, используя преимущества как магнитного, так и реактивного крутящего момента двигателя (см. Рисунок 4).
Моторные конструкции ПМ
Моторные конструкции
PM можно разделить на две категории: внутренние и поверхностные. У каждой категории есть подмножество категорий. Поверхностный двигатель с постоянными магнитами может иметь свои магниты на поверхности ротора или вставленные в него, чтобы повысить надежность конструкции. Расположение и дизайн внутреннего двигателя с постоянными магнитами могут сильно различаться. Магниты двигателя IPM могут быть вставлены в виде большого блока или смещены по мере приближения к сердечнику.Другой метод — вставить их в узор спиц.
Изменение индуктивности двигателя с постоянными магнитами под нагрузкой
Только такое количество магнитного потока может быть связано с куском железа для создания крутящего момента. В конце концов, железо насыщается и больше не позволяет флюсу связываться. В результате уменьшается индуктивность пути, проходимого магнитным полем. В машине с постоянным магнитом значения индуктивности по оси d и q будут уменьшаться с увеличением тока нагрузки.
Индуктивности оси d и q двигателя SPM практически идентичны.Поскольку магнит находится вне ротора, индуктивность оси q будет падать с той же скоростью, что и индуктивность оси d. Однако индуктивность двигателя IPM будет уменьшаться иначе. Опять же, индуктивность по оси d, естественно, ниже, потому что магнит находится на пути потока и не создает индуктивных свойств. Следовательно, по оси d меньше железа для насыщения, что приводит к значительно меньшему снижению магнитного потока по отношению к оси q.
Ослабление / усиление потока двигателей с постоянными магнитами
Поток в двигателе с постоянными магнитами создается магнитами.Поле потока следует определенному пути, который можно усилить или противодействовать.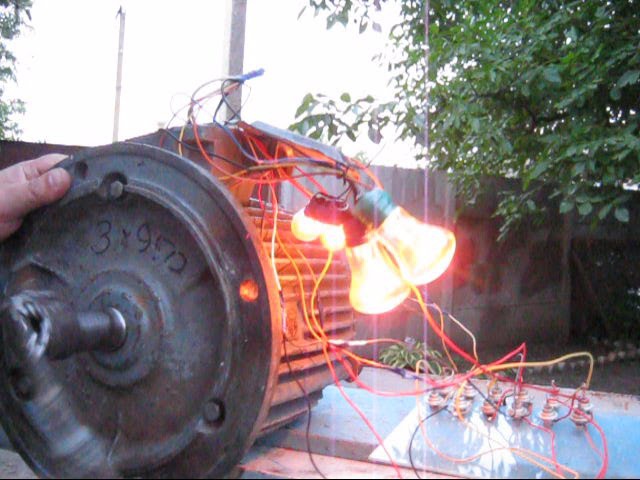 Повышение или усиление магнитного поля позволит двигателю временно увеличить производство крутящего момента. Противодействие полю магнитного потока устранит существующее магнитное поле двигателя. Уменьшенное магнитное поле ограничит производство крутящего момента, но снизит напряжение обратной ЭДС. Пониженное напряжение обратной ЭДС высвобождает напряжение, заставляя двигатель работать с более высокими выходными скоростями. Оба типа работы требуют дополнительного тока двигателя. Направление тока двигателя поперек оси d, обеспечиваемое контроллером двигателя, определяет желаемый эффект.
Повышение или усиление магнитного поля позволит двигателю временно увеличить производство крутящего момента. Противодействие полю магнитного потока устранит существующее магнитное поле двигателя. Уменьшенное магнитное поле ограничит производство крутящего момента, но снизит напряжение обратной ЭДС. Пониженное напряжение обратной ЭДС высвобождает напряжение, заставляя двигатель работать с более высокими выходными скоростями. Оба типа работы требуют дополнительного тока двигателя. Направление тока двигателя поперек оси d, обеспечиваемое контроллером двигателя, определяет желаемый эффект.
Угол возбуждения
Угол возбуждения — это угол, под которым векторная сумма сигналов оси d и осей q возбуждается в двигателе относительно оси d. Ось d всегда рассматривается там, где находится магнит. Максимальный магнитный поток достигается на оси q, которая составляет 90 электрических градусов от оси d. Поэтому в большинстве ссылок на угол возбуждения уже учтена разница в 90 градусов от оси d до оси q.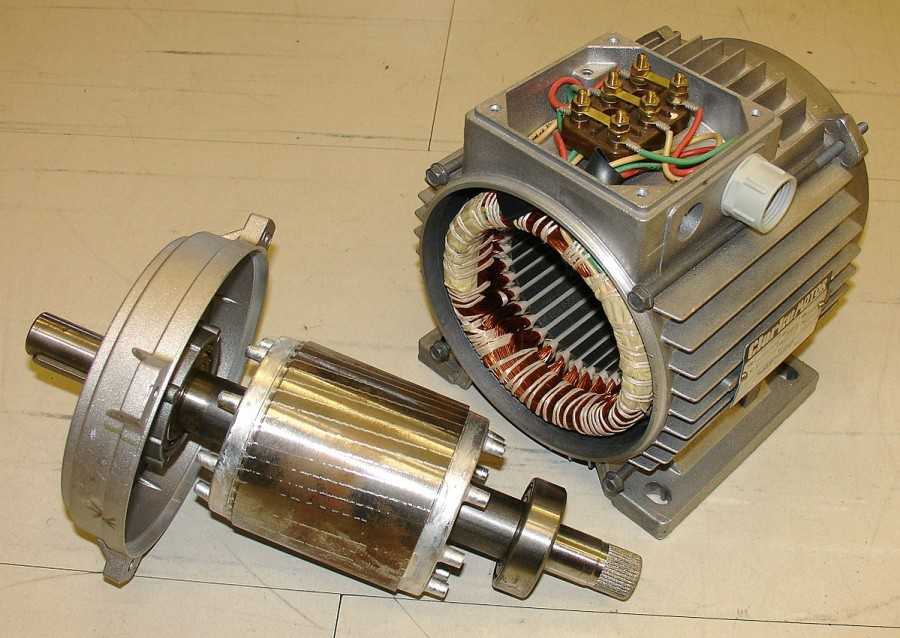
Фазовый угол и крутящий момент
Магнитный момент максимизируется, когда поле статора возбуждает ротор двигателя на 90 электрических градусов от оси d (положение магнита двигателя).Крутящий момент сопротивления движется по другому пути и достигает максимума на 45 электрических градусов за осью q. В максимальном магнитном моменте используется как магнитное сопротивление двигателя, так и магнитные моменты. Сдвиг дальше от оси q снижает магнитный момент, но намного перевешивается увеличением реактивного момента. Максимальный комбинированный магнитный и реактивный крутящий момент возникает около 45 электрических градусов от оси q, но точный угол будет варьироваться в зависимости от характеристик двигателя с постоянными магнитами.
Удельная мощность двигателя IPM
Мощность двигателя с постоянными магнитами зависит от конфигурации магнитов двигателя и получаемой мощности двигателя.Двигатели с высоким коэффициентом резкости (Lq> Ld) могут повысить КПД двигателя и выработку крутящего момента за счет учета реактивного момента двигателя. Инвертор можно использовать для изменения угла возбуждения относительно оси d, чтобы максимизировать как реактивный момент, так и магнитный момент двигателя.
Инвертор можно использовать для изменения угла возбуждения относительно оси d, чтобы максимизировать как реактивный момент, так и магнитный момент двигателя.
Типы магнитов двигателя с постоянными магнитами
В настоящее время для электродвигателей используется несколько типов материалов с постоянными магнитами. У каждого вида металла есть свои достоинства и недостатки.
Размагничивание постоянного магнита
Постоянные магниты трудно назвать постоянными, и их возможности ограничены. На эти материалы могут быть приложены определенные силы, размагничивающие их. Другими словами, можно удалить магнитные свойства материала постоянного магнита. Вещество с постоянным магнитом может размагнититься, если материал значительно деформируется, нагревается до значительных температур или подвергается воздействию сильного электрического возмущения.
Во-первых, напряжение постоянного магнита обычно осуществляется физическими средствами. Магнитный материал может размагнититься, если не ослабнуть, если он подвергнется сильным ударам / падению. Ферромагнитный материал обладает магнитными свойствами. Однако эти магнитные свойства могут излучать в любом множестве направлений. Один из способов намагничивания ферромагнитных материалов — это приложение к материалу сильного магнитного поля для выравнивания его магнитных диполей. Выравнивание этих диполей направляет магнитное поле материала в определенную ванну.Сильный удар может нарушить атомную ориентацию магнитных доменов материала, что ослабит силу предполагаемого магнитного поля.
Магнитный материал может размагнититься, если не ослабнуть, если он подвергнется сильным ударам / падению. Ферромагнитный материал обладает магнитными свойствами. Однако эти магнитные свойства могут излучать в любом множестве направлений. Один из способов намагничивания ферромагнитных материалов — это приложение к материалу сильного магнитного поля для выравнивания его магнитных диполей. Выравнивание этих диполей направляет магнитное поле материала в определенную ванну.Сильный удар может нарушить атомную ориентацию магнитных доменов материала, что ослабит силу предполагаемого магнитного поля.
Во-вторых, на постоянный магнит могут влиять и температуры. Температуры заставляют магнитные частицы в постоянном магните взволноваться. Магнитные диполи обладают способностью выдерживать некоторое тепловое колебание. Однако длительные периоды перемешивания могут ослабить силу магнита, даже если он хранится при комнатной температуре. Кроме того, все магнитные материалы имеют порог, известный как «температура Кюри», который является порогом, определяющим температуру, при которой тепловое перемешивание вызывает полное размагничивание материала. Такие термины, как коэрцитивная сила и удерживающая способность, используются для определения способности магнитного материала сохранять прочность.
Такие термины, как коэрцитивная сила и удерживающая способность, используются для определения способности магнитного материала сохранять прочность.
Наконец, большие электрические помехи могут вызвать размагничивание постоянного магнита. Эти электрические возмущения могут возникать из-за взаимодействия материала с большим магнитным полем или из-за того, что через материал проходит большой ток. Примерно так же, как сильное магнитное поле или ток можно использовать для выравнивания магнитных диполей материала, другое сильное магнитное поле или ток, приложенный к полю, создаваемому постоянным магнитом, может привести к размагничиванию.
Самоопределение в сравнении с режимом замкнутого цикла
Последние достижения в области приводной техники позволяют стандартным приводам переменного тока «самообнаруживать» и отслеживать положение магнита двигателя. Система с обратной связью обычно использует канал z-импульса для оптимизации производительности. Благодаря определенным процедурам привод знает точное положение магнита двигателя, отслеживая каналы A / B и исправляя ошибки с помощью канала z. Знание точного положения магнита позволяет добиться оптимального крутящего момента, что приводит к оптимальной эффективности.
Знание точного положения магнита позволяет добиться оптимального крутящего момента, что приводит к оптимальной эффективности.
Серводвигатели
Серводвигатели
— это двигатели с постоянными магнитами, используемые для управления движением. Как правило, в конструкции двигателя с внутренним / внутренним постоянным магнитом эти двигатели соединяются с конкретным усилителем как часть согласованного набора для достижения максимальной производительности. Усилитель был точно настроен на двигатель с постоянными магнитами для достижения оптимальных характеристик его производителем. Конфигурация усилителя движения / сервопривода обычно использует обратную связь двигателя, которая также обеспечивает обратную связь по положению магнитного полюса и скорости.
Christopher Jaszczolt — специалист по управлению приводными продуктами в Yaskawa America Inc. Он имеет более девяти лет опыта в области управления движением. В дополнение к своей нынешней должности Ящолт работал инженером технической поддержки и инженером по приложениям. Имеет степень бакалавра естественной среды в Университете Северного Иллинойса, ДеКалб, Иллинойс,
Имеет степень бакалавра естественной среды в Университете Северного Иллинойса, ДеКалб, Иллинойс,
.
Эта статья появляется в приложении Applied Automation для Control Engineering
и Plant Engineering.
КОНСТРУКЦИЯ ВЫСОКОСКОРОСТНОГО ПОСТОЯННОГО МАГНИТА СИНХРОННЫЙ ДВИГАТЕЛЬ / ГЕНЕРАТОР ДЛЯ ПРИМЕНЕНИЯ МАХОВИКА
1 ВЫСОКОСКОРОСТНОЙ ПОСТОЯННЫЙ МАГНИТ СИНХРОННЫЙ ДВИГАТЕЛЬ / ГЕНЕРАТОР ДЛЯ ПРИМЕНЕНИЯ МАХОВИКА Александр Нагорный, канд. Национальный исследовательский совет
2 Краткое описание Введение Выбор номинальной точки Основные требования к маховику M / G в космических приложениях Соответствие проектным требованиям M / G Выбор основных материалов Выбор толщины ламинирования Инструменты моделирования M / G Процесс предварительного проектирования Выбор материала постоянного магнита Аналитическая конструкция RMxprt Выходная арматура Расчет реакций и размагничивания M / G 2D конечно-элементное моделирование M / G 3D конечно-элементное моделирование Заключительные наблюдения и рекомендации Ссылки Благодарности
3 Введение Конструкция двигателя / генератора является частью работы, выполняемой в Исследовательском центре NASA Glenn Research Center, посвященной разработке модулей маховика для использования в спутниковых системах хранения энергии и ориентации. Преимущества модуля маховика в качестве накопителя энергии в космических кораблях по сравнению с химическими батареями заключаются в следующем: более высокая плотность энергии и мощности, большая глубина разряда, более широкий диапазон рабочих температур. Маховик можно использовать в качестве источника импульса для управления ориентацией, что дает возможность объединить две спутниковые подсистемы в одну и уменьшить общий объем и массу.
Преимущества модуля маховика в качестве накопителя энергии в космических кораблях по сравнению с химическими батареями заключаются в следующем: более высокая плотность энергии и мощности, большая глубина разряда, более широкий диапазон рабочих температур. Маховик можно использовать в качестве источника импульса для управления ориентацией, что дает возможность объединить две спутниковые подсистемы в одну и уменьшить общий объем и массу.
4 Выбор номинального значения Определение выходной мощности Определение выходной мощности основано на профилях нагрузки во время циклов нагрузки.С t = до t = 6 мин — это заряд (режим двигателя), с t = 6 до t = 9 мин — разряд (режим генератора). В каждой точке чистый крутящий момент M / G равен T net = T ES + T AC, где T ES — составляющая крутящего момента, необходимая для накопления энергии, а T AC — составляющая, необходимая для управления ориентацией. Крутящий момент, Нм Определение выходной мощности комбинированного накопителя энергии и регулировки положения маховика Время цикла, мин Крутящий момент Tes Полезный крутящий момент Момент переменного тока Выходная мощность Выходная мощность, Вт
5 Основные требования к маховику M / G в космических приложениях Относительно высокая электрическая частота напряжений и токов Высокая удельная мощность Высокая эффективность, низкие общие потери Низкие гармонические искажения в форме сигнала обратной ЭДС Низкие значения крутящего момента малые потери ротора Высокая термическая стойкость, способность работать в вакууме без интенсивного охлаждения
6 Соответствие конструктивным требованиям Высокая удельная мощность: правильный выбор конфигурации M / G Применение материалов с постоянными магнитами с высокой магнитной энергией Применение материалов для ламинирования сердечника с высокой проницаемостью Высокая эффективность, низкие общие потери: выбор синхронной машины с постоянными магнитами переменного тока с нулевой Магнитные и проводящие потери ротора основной частоты Применение материалов для ламинирования сердечника с низкими удельными потерями Применение многожильных проводов тонкого диаметра для проводов якоря статора для снижения высокочастотных потерь на скин-эффект
7 Соответствие конструктивным требованиям (продолжение) Низкий коэффициент нелинейных искажений на кривой обратной ЭДС и низкое значение крутящего момента от зубчатого зацепления. Может быть достигнуто за счет уменьшения высокочастотных пространственных гармоник mmf следующими способами: Сделать дуги полюсов магнита короткими. Двухслойная обмотка статора с коротким шагом. Перекос сердечника статора в осевом направлении. Относительно большой немагнитный зазор; Малая величина отношения раскрытия паза к шагу паза Специальная форма зубьев статора (фиктивные пазы) Расслоение постоянных магнитов в осевом направлении
Может быть достигнуто за счет уменьшения высокочастотных пространственных гармоник mmf следующими способами: Сделать дуги полюсов магнита короткими. Двухслойная обмотка статора с коротким шагом. Перекос сердечника статора в осевом направлении. Относительно большой немагнитный зазор; Малая величина отношения раскрытия паза к шагу паза Специальная форма зубьев статора (фиктивные пазы) Расслоение постоянных магнитов в осевом направлении
8 Соответствие проектным требованиям (продолжение) Низкое значение потерь в роторе: Основные составляющие потерь в роторе: Обратные потери в стали; Потери на вихревые токи в материале постоянного магнита; Потеря втулки из углеродного волокна M / G; Потеря ветра.Первые три составляющие потерь в роторе вызваны высокочастотными пространственными гармониками mmf. Меры по их сокращению такие же, как описано на предыдущем слайде. Эффективной мерой против потерь в железной задней части является ламинация сердечника в задней части.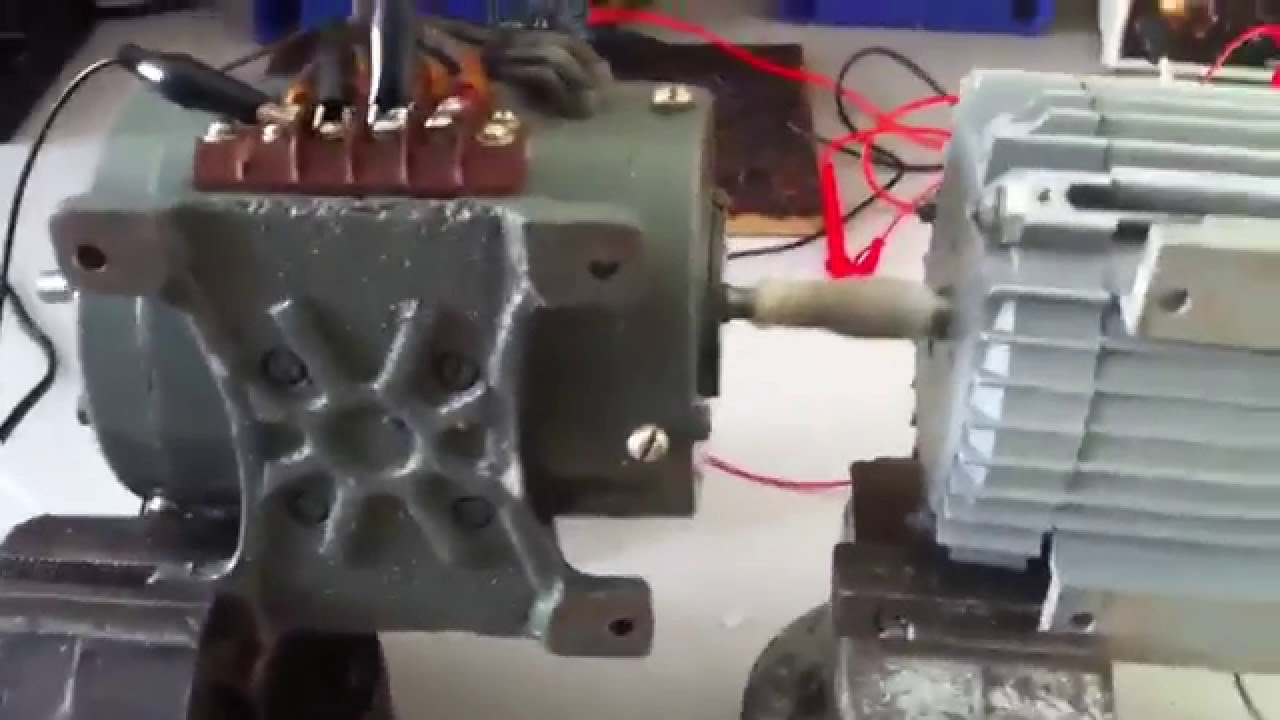
9 Соответствие конструктивным требованиям (продолжение d) Высокая термическая стойкость: Высокая термическая стойкость может быть достигнута за счет использования соответствующих материалов для деталей статора и ротора: Материалы для ламинирования сердечника статора и ротора Изоляция проводов Изоляция пазов Изоляция частей обмотки Изоляция выводов двигателя Материалы постоянного магнита Ротор из углеродного волокна.Для текущей конструкции M / G все материалы, кроме композитного углеродного волокна, имеют номинальную температуру выше 2 ° C.
10 M / G Выбор основных материалов Использование перспективных материалов Основными материалами двигателя, которые могут повлиять на характеристики двигателя, являются следующие ферромагнитные материалы сердечника материалы постоянных магнитов изоляция обмотки магнитных проводов Ферромагнитные материалы сердечника Две основные характеристики ферромагнитных материалов сердечника могут влиять на двигатель производительность максимальная плотность потока насыщения удельные потери
11 Инструменты моделирования Программное обеспечение Ansoft Corporation RMxprt используется для предварительного проектирования двигателя.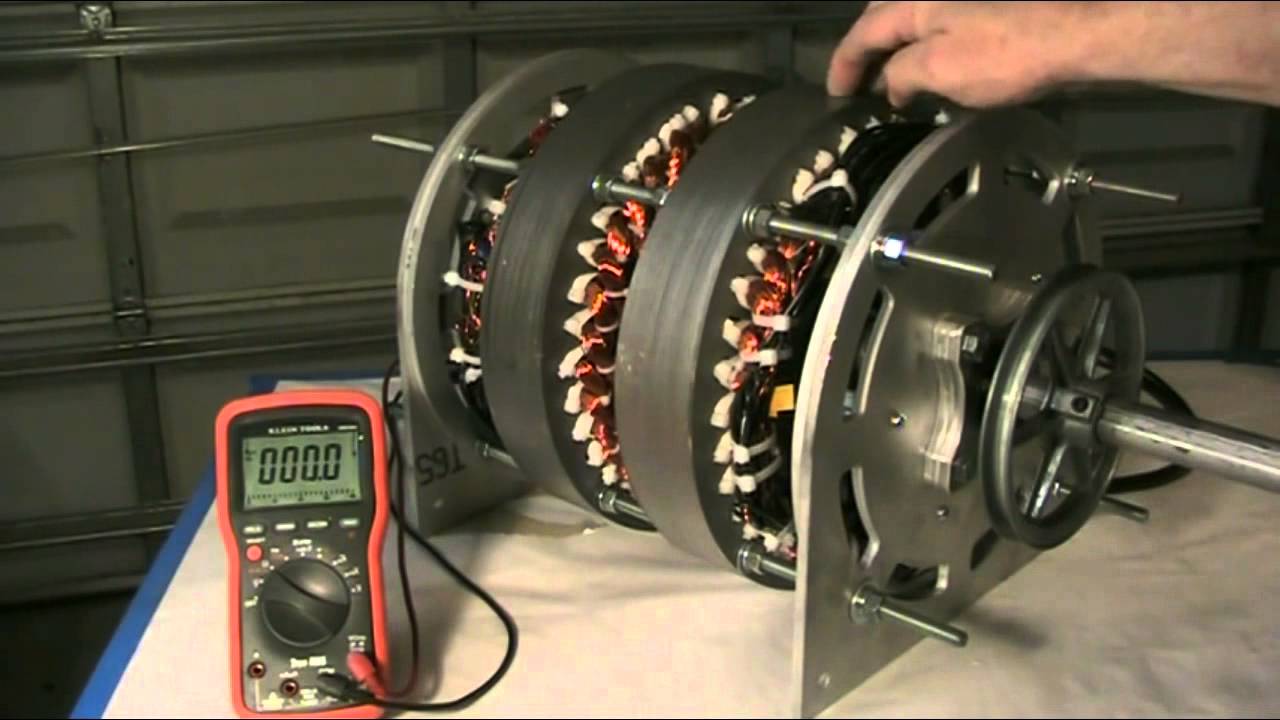 Преимущества программного обеспечения RMxprt следующие: Возможность получить простой и быстрый ответ в удобной форме. Выходные данные могут быть легко экспортированы в другое программное обеспечение Ansoft (Maxwell 2D, Simplorer). Программа может выполнять оптимизацию входных параметров
Преимущества программного обеспечения RMxprt следующие: Возможность получить простой и быстрый ответ в удобной форме. Выходные данные могут быть легко экспортированы в другое программное обеспечение Ansoft (Maxwell 2D, Simplorer). Программа может выполнять оптимизацию входных параметров
.
12 M / G Предварительный процесс проектирования Были выполнены многочисленные итерации проектирования для удовлетворения требований двигателя в режиме двигателя и генератора.Различные конфигурации ротора, материалы постоянного магнита и сердечника, а также геометрия M / G были оптимизированы с использованием режима параметрического анализа RMxprt. Наивысший уровень выходной мощности в сочетании с относительно низким уровнем гармонических искажений обратной ЭДС был получен для дугообразного магнита поверхностного монтажа
.
13 Выбор материала постоянного магнита Выходная мощность M / G в режиме генератора для различных PM материалов W SmCo 24 SmCo 28 NdFe 3 NdFe 38 Тип материала магнита Группа NdFe имеет более высокую остаточную намагниченность и произведение энергии.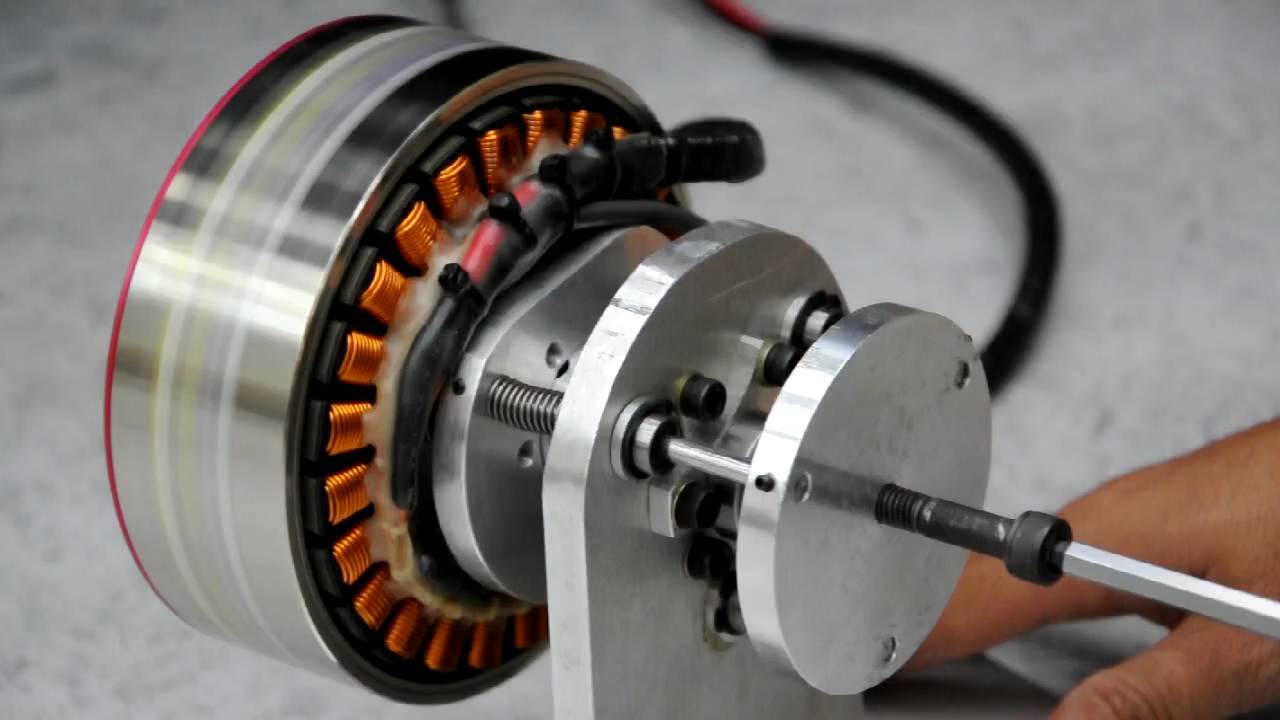 SmCo имеет лучшие тепловые характеристики.
SmCo имеет лучшие тепловые характеристики.
14 Выбор толщины ламинирования Удельные потери, Вт / кг Удельные потери в железе в зависимости от толщины ламинирования для высоконасыщенного сплава кобальт-железо при 12 Гц и 2 T y = xx R 2 = Толщина ламинирования, дюймы При высоких частотах (1,2 кГц) и высокой плотности потока (2. T) удельные потери в железе пропорциональны квадрату толщины ламинации.Для уменьшения потерь в стали толщина ламинации должна иметь низкое значение (в нашем случае 4).
15 Аналитический дизайн RMxprt Выходные данные СТАТОРА Количество пазов статора: Внешний диаметр статора (дюймы): Внутренний диаметр статора (дюймы): Длина сердечника статора (дюймы): Количество проводников на слот: Параметры M / G при номинальных точка Номинальная выходная мощность (кВт): Номинальное напряжение (В): Число полюсов: Частота (Гц): Рабочая температура (C): Режим двигателя: Режим генератора ДАННЫЕ РОТОРА Немагнитный зазор, дюйм Внутренний диаметр (дюйм): Длина ротора ( дюймов): THD наведенного напряжения (%): Крутящий момент (Н. м): Линейный ток RMS (A): КПД (%): Синхронная скорость (об / мин): Макс. Толщина магнита (дюйм): 27 Номинальный крутящий момент (Н-м): Тип магнита: SmCo Общий вес нетто (фунты):
м): Линейный ток RMS (A): КПД (%): Синхронная скорость (об / мин): Макс. Толщина магнита (дюйм): 27 Номинальный крутящий момент (Н-м): Тип магнита: SmCo Общий вес нетто (фунты):
16 Аналитический расчет RMxprt Выходная мощность (продолжение) Крутящий момент, Нм Крутящий момент зацепления Электрический угол, мощность в градусах, Вт Выходная мощность в зависимости от угла крутящего момента, КПД в зависимости от угла крутящего момента Ток в зависимости от угла крутящего момента Угол крутящего момента, град
17 Аналитический расчет RMxprt в зависимости от распределения плотности потока в воздушном зазоре (RMxprt) Распределение плотности потока в воздушном зазоре..2 дюйма от поверхности маннетов Плотность потока FEA, TB, T Электрический угол, градусы Положение в воздушном зазоре, дюйм Распределение плотности потока в воздушном зазоре, 0,53 дюйма от поверхности магнитов FEA 1. 2 Распределение плотности потока в воздушный зазор, 0,2 дюйма от отверстия статора FEA. 8.8 B, TB, T Положение в воздушном зазоре, дюймы Положение в воздушном зазоре, дюймы FEA показывает более высокую плотность магнитного потока в воздушном зазоре, чем RMxprt
2 Распределение плотности потока в воздушный зазор, 0,2 дюйма от отверстия статора FEA. 8.8 B, TB, T Положение в воздушном зазоре, дюймы Положение в воздушном зазоре, дюймы FEA показывает более высокую плотность магнитного потока в воздушном зазоре, чем RMxprt
18 Частота, Гц M / G Частота Время, мин. M / G Ток якоря Время, мин. Ток, A Мощность, Вт Аналитический расчетный расчет RMxprt Выход (продолжение) M / G Выходная мощность Время, мин. M / G Напряжение Исследование M / G Характеристики во время рабочего цикла Напряжение, потеря напряжения, Вт КПД,% времени, мин. Общее время потери M / G.мин M / G Время эффективности, мин
19 Расчет реакции якоря и размагничивания Br t α Br (ϑ ϑ) = Brs ts Hc α Hc (ϑ ϑ) t = Hc sts Самарий Кобальт (спеченный) S2769 Линии размагничивания при различных температурах C 2 C 1,8 Br, T Hc, A / м Кривые размагничивания постоянных магнитов чувствительны к температуре
20 Расчет реакции якоря и размагничивания (продолжение) Стандартный метод проверки размагничивания постоянных магнитов из-за реакции якоря описан в T. Книга Дж. Миллера [1]. Недостатком этого метода является предположение, что полюс постоянного магнита имеет равномерное насыщение. Φ m Fa Кривая размагничивания постоянного магнита hm = 0,3 дюйма Φ r P m Φ LRL Φ g Rg B, TH, A / m Φ r = B r AMR g = µ g A g B m = 1 + Pr 1 (1 + P m RR gg B) r B g C Br (1+ PR) = Φ mg C = Φ AA mg PC = µ rec 1 + PP m r1 RR gg B ma µ µ F = rec dem Bload = Bm Bma lm H m = B r Bm µ µ rec P mo = µ µ l rec m A m
Книга Дж. Миллера [1]. Недостатком этого метода является предположение, что полюс постоянного магнита имеет равномерное насыщение. Φ m Fa Кривая размагничивания постоянного магнита hm = 0,3 дюйма Φ r P m Φ LRL Φ g Rg B, TH, A / m Φ r = B r AMR g = µ g A g B m = 1 + Pr 1 (1 + P m RR gg B) r B g C Br (1+ PR) = Φ mg C = Φ AA mg PC = µ rec 1 + PP m r1 RR gg B ma µ µ F = rec dem Bload = Bm Bma lm H m = B r Bm µ µ rec P mo = µ µ l rec m A m
21 Расчет реакции якоря и размагничивания (продолжение) Более точным способом проверки размагничивания является метод FEA.Используя программу расчета переходных процессов Maxwell 2D, необходимо определить решение для номинальной нагрузки. Определяются относительное положение ротор-статор и мгновенные значения фазных токов. Затем, используя положение и значения, полученные с помощью решателя переходных процессов, можно создать 2D магнитостатическую модель Максвелла и определить распределение плотности потока в постоянных магнитах.
22 Расчет реакции якоря и размагничивания (продолжение) Линии потока в двигателях и векторах плотности потока без реакции якоря Ia =
23 Расчет реакции якоря и размагничивания (продолжение) Ia = 387 A Из-за реакции якоря уровень размагничивание в углу полюса магнита выше, чем в других областях магнита.
24 Расчет реакции якоря и размагничивания (продолжение) Ia = 581A Зависимость плотности потока постоянного магнита от тока якоря 1.8 Bm av 2 CB m corn 2 C.6.4 B, T Ток фазы A, A Среднее значение плотности магнитного потока в магните по-прежнему намного больше нуля, но угловая область магнита размагничена
25 M / G 2D конечно-элементное моделирование Более точное решение M / G характеристик можно найти с помощью конечно-элементного анализа. Таким образом, точность результатов, полученных программным обеспечением RMxprt, может быть проверена. Переходная модель конечных элементов включает в себя ротор и сердечник статора, проводники, вал, магниты, прокладки между магнитами и кольцо из углеродного волокна. Таким образом, все составляющие потерь ротора могут быть определены с хорошей точностью.
Таким образом, все составляющие потерь ротора могут быть определены с хорошей точностью.
26 M / G 2D конечно-элементное моделирование (продолжение) Использовался решатель 2D переходных режимов Maxwell с пошаговым подходом по времени. Учитываются эффекты насыщения, вихревых токов, пазов, положения ротора и пространственных гармоник. Из-за использования двухслойной обмотки с коротким шагом, когда два слоя обмотки имеют угловое смещение, в этой машине отсутствует зеркальная симметрия.Таким образом, не было возможности использовать симметрию ведущего и ведомого устройства. Для исследования характеристик M / G были применены два разных подхода: источники синусоидального напряжения и источники синусоидального тока. Оба метода показывают одинаковые результаты для моторных характеристик. После решения переходного процесса магнитостатический решатель использовался для проверки значения крутящего момента, разработанного для указанных значений тока.
27 M / G 2D конечно-элементное моделирование (продолжение) Tav = 1. 645 Нм
645 Нм
28 M / G 2D конечно-элементное моделирование (продолжение) Центры потерь на вихревые токи Pav = 8,1 Вт Потери на вихревые токи были рассчитаны для постоянных магнитов, кольца из углеродного волокна и прокладок между магнитами. P = l 1 σ J JdA A Где σ — проводимость материала, l — глубина петли вихревого тока в направлении Z, A — площадь поверхности, J — плотность тока. Можно заметить, что пики потерь на вихревые токи находятся под щелевыми отверстиями. Значение локальной плотности вихревого тока зависит от мгновенного значения тока в ближайшей щели.
29 M / G 3D конечно-элементное моделирование Наклон паза статора вызывает силу в осевом направлении, которая может повлиять на работу магнитных подшипников. Для определения значения этой силы использовалась следующая методика. 1) С помощью программы Maxwell 2D Transient Solver находят относительное положение ротора и статора и мгновенные значения фазных токов. 2) Используя эти значения положения и токов, была создана 3D-магнитостатическая модель Максвелла и определены значения силы в зависимости от фазных токов с учетом эффекта перекоса.
30 M / G 3D-моделирование конечных элементов (продолжение d) Сила в осевом направлении, вызванная перекосом паза, в зависимости от фазового тока 12 Сила, ток N, 3D-модель учитывает двухслойную обмотку и перекос паза
31 G3 Маховик M / G Конструкция На основании представленных результатов проектирования M / G как часть нового модуля маховика G3 был полностью спроектирован, и прототип планируется изготовить в этом году.
32 Заключительные наблюдения и рекомендации Ansoft RMxprt, Maxwell 2D и 3D — мощные инструменты для проектирования электрических машин.Некоторые предложения по упрощению использования этих программ приведены ниже. 1. Было бы полезно как часть выходов RMxprt для синхронных двигателей с постоянными магнитами и генераторов показывать кривую размагничивания магнитов (с нагрузкой и без нагрузки). линии), линейку продуктов энергии и векторную диаграмму номинальной точки машины. 2. Моделирование высокочастотной синхронной машины с постоянным магнитом в переходном режиме требует относительно небольших временных шагов. Из-за этого требуется много вычислительного времени, чтобы получить результаты устойчивого состояния для анализа переходных процессов в 2D и особенно в 3D-моделировании.
Из-за этого требуется много вычислительного времени, чтобы получить результаты устойчивого состояния для анализа переходных процессов в 2D и особенно в 3D-моделировании.
33 Ссылки 1. Дж. Р., младший Хендершот, Т. Дж. Миллер, Дизайн бесщеточных двигателей с постоянными магнитами, Oxford University Press, 1996
34 Благодарности Эта работа была выполнена, когда автор получил награду Национального исследовательского совета в Исследовательском центре Гленна НАСА Кливленд Огайо
HSC Physics — Motors and Generators notes — краткое содержание курса
HSC Physics — Motors and Generators notes
Это набор точечных сводных заметок HSC Physics для двигателей и генераторов.Репетиторство по физике HSC в Dux College предоставляет студентам необходимую поддержку для достижения результата 6 балла по HSC Physics.
Двигатель
Проводники и магнитные поля
Магнитное поле вокруг проводника
Круговое магнитное поле создается вокруг проводника с током. Чтобы определить направление этой круговой силы, мы используем правило для правой руки . Напомним, что точки представляют собой магнитное поле за пределами страницы, а крестики представляют собой магнитное поле на странице.
Сила, действующая на проводник во внешнем магнитном поле
Так как проводник с током генерирует собственное магнитное поле, это магнитное поле может взаимодействовать с внешним магнитным полем, оказывая на проводник силу. Чтобы определить направление силы, мы использовали правило для правой руки (F на ладони, B на пальцах, I большой палец). Это правило также можно использовать для определения силы, действующей на пучок движущихся зарядов.
Величина силы зависит от нескольких факторов:
Где
- — сила внешнего магнитного поля, в теслах
- — ток в проводнике, А
- — длина проводника в магнитном поле, в метрах
- — угол между силовыми линиями магнитного поля и направлением тока.
Из уравнения видно, что сила, действующая на проводник с током, прямо пропорциональна силе внешнего магнитного поля, величине тока и соответствующей длине проводника. Сила не будет существовать на проводнике, если проводник параллелен магнитному полю (т.е.). В противном случае наибольшая сила на проводнике возникает, когда угол между током и магнитным полем составляет 90 °.
Сила между токоведущими параллельными проводниками
Сила между проводниками существует потому, что магнитное поле из-за тока в каждом проводнике взаимодействует с магнитным полем из-за тока в другом проводнике.Направление силы (притяжения или отталкивания) зависит от относительного направления двух токов. Помните:
| Текущее направление | То же | Напротив |
| Усилие | Аттракцион | Отталкивание |
Отвечая на эти типы экзаменационных вопросов, не забудьте указать в направление силы (притягивающее или отталкивающее).
Количественно сила между двумя проводниками прямо пропорциональна токам в проводниках и общей длине (). Оно обратно пропорционально расстоянию между ними. Константа пропорциональности — это постоянная магнитной силы (обозначенная в стандартной таблице формул HSC как).
Математически мы можем написать:
Крутящий момент
Крутящий момент — это крутящий момент силы в точке поворота. Другими словами, это сила в направлении скручивания в точке скручивания.Это произведение тангенциальной составляющей силы () и расстояния, на которое сила приложена от оси вращения.
Моторный эффект
Электрические токи в проводниках создают магнитные поля. Если эти проводники находятся внутри внешнего магнитного поля (например, создаваемого постоянными магнитами), они действительно могут начать двигаться. Это движение вызвано взаимодействием между магнитным полем, индуцированным проводником, и внешним магнитным полем.Именно это движение проводников с током внутри магнитных полей называется моторным эффектом и является принципом электродвигателей, отсюда и название.
Катушка в магнитном поле
Катушка в магнитном поле может вращаться под действием двигателя.
Предположим, для простоты обсуждения, что ось вращения прямоугольной катушки перпендикулярна магнитному полю, и что длинные стороны катушки параллельны оси и равноудалены от нее.
На каждую длинную сторону катушки действует сила, величина которой не меняется при вращении катушки, поскольку стороны всегда остаются перпендикулярными полю. Эта сила задается. Можно показать, что сила на каждой длинной стороне всегда в одном и том же направлении на протяжении всего вращения катушки, противоположна направлению силы на другой длинной стороне и всегда перпендикулярна оси.
Сила на каждой длинной стороне создает крутящий момент вокруг оси. Поскольку силы имеют противоположные направления, а их линии действия находятся на противоположных сторонах оси, они создают крутящий момент в том же направлении.Таким образом, их эффект заключается в вращении катушки вокруг своей оси.