
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение.
Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков.
О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС.
В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС.
Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах.
Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора.
А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными.
Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток.
Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
- Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки.
Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки.
Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс.
От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту.
То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.


Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них.
Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.

Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
- В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
- В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».

А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка.
Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели.
К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.
 Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Материалы по теме:
Источник: https://samelectrik. ru/chto-takoe-beskollektornyj-dvigatel-postoyannogo-toka.html
ru/chto-takoe-beskollektornyj-dvigatel-postoyannogo-toka.html
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения.
Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д.
Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесщеточный электродвигатель постоянного тока — Brushless DC electric motor
Синхронный электродвигатель с питанием от инвертора
Двигатель от 3,5-дюймового флоппи-дисковода. Катушки, расположенные радиально, изготовлены из медной проволоки с голубой изоляцией. Ротор (вверху справа) был снят и перевернут. Серое кольцо внутри чашки — это постоянный магнит. Этот конкретный двигатель является опережающим , со статором внутри ротора.
Серое кольцо внутри чашки — это постоянный магнит. Этот конкретный двигатель является опережающим , со статором внутри ротора.
Бесщеточный канальный вентилятор постоянного тока . Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в блоке вентилятора.
Вентильный двигатель ( БКЭПТ или BL двигателя ), также известный как электронно — коммутируемого двигателя ( ECM или двигателем EC ) и синхронных двигателей постоянного тока , являются синхронными двигателями питание от постоянного тока (DC) электроэнергии через инвертор или импульсный источник питания , который производит электричество в виде переменного тока (AC) для управления каждой фазой двигателя через контроллер с обратной связью . Контроллер подает импульсы тока на обмотки двигателя, которые регулируют скорость и крутящий момент двигателя. Эта система управления заменяет коммутатор (щетки), используемый во многих обычных электродвигателях.
Конструкция системы бесщеточного двигателя обычно аналогична синхронному двигателю с постоянными магнитами (PMSM), но также может быть вентильным или индукционным (асинхронным) двигателем . Они также могут использовать неодимовые магниты и быть бегунками (статор окружен ротором), бегунами (ротор окружен статором) или осевыми (ротор и статор плоские и параллельные).
Преимущества бесщеточного двигателя перед щеточными двигателями — высокое отношение мощности к весу, высокая скорость, электронное управление и низкие эксплуатационные расходы. Бесщеточные двигатели находят применение в таких местах, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от моделей самолетов до автомобилей. В современных стиральных машинах бесщеточные двигатели постоянного тока позволили заменить резиновые ремни и редукторы конструкцией с прямым приводом.
Задний план
Щеточные двигатели постоянного тока были изобретены в 19 веке и до сих пор распространены.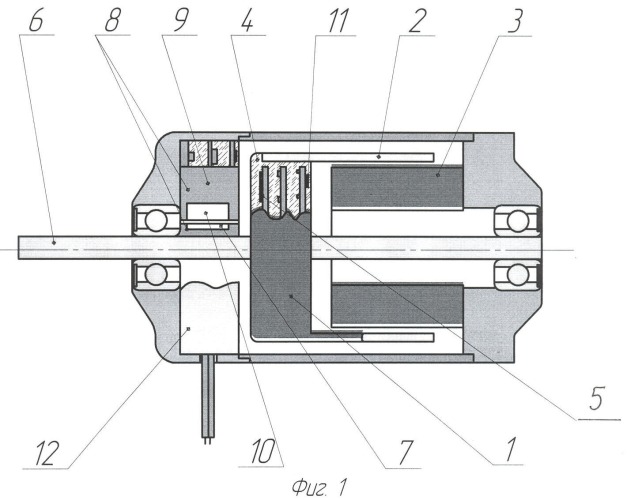 Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х годах.
Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х годах.
Электродвигатель развивает крутящий момент за счет смещения магнитных полей ротора , вращающейся части машины, и статора , неподвижной части машины. Один или оба набора магнитов представляют собой электромагниты , состоящие из катушки с проволокой, намотанной на железный сердечник. Постоянный ток, проходящий через обмотку провода, создает магнитное поле , обеспечивающее питание двигателя. Несоосность порождает крутящий момент, который пытается перестроить поля. По мере того как ротор движется, и поля приходят в соответствие, необходимо перемещать поле ротора или статора, чтобы поддерживать несоосность и продолжать генерировать крутящий момент и движение. Устройство, которое перемещает поля в зависимости от положения ротора, называется коммутатором.
Щеточный коммутатор
В щеточных двигателях это делается с помощью поворотного переключателя на валу двигателя, называемого коммутатором . Он состоит из вращающегося цилиндра, разделенного на несколько металлических контактных сегментов на роторе. Сегменты подключены к обмоткам проводов на роторе. Два или более неподвижных контакта, называемых щетками , изготовленные из мягкого проводника, такого как графит , прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при вращении ротора. Щетки выборочно подают электрический ток на обмотки. Когда ротор вращается, коммутатор выбирает разные обмотки, и направленный ток прикладывается к данной обмотке, так что магнитное поле ротора остается смещенным относительно статора и создает крутящий момент в одном направлении.
Он состоит из вращающегося цилиндра, разделенного на несколько металлических контактных сегментов на роторе. Сегменты подключены к обмоткам проводов на роторе. Два или более неподвижных контакта, называемых щетками , изготовленные из мягкого проводника, такого как графит , прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при вращении ротора. Щетки выборочно подают электрический ток на обмотки. Когда ротор вращается, коммутатор выбирает разные обмотки, и направленный ток прикладывается к данной обмотке, так что магнитное поле ротора остается смещенным относительно статора и создает крутящий момент в одном направлении.
Недостатки коммутатора
Коммутатор имеет недостатки, которые привели к сокращению использования щеточных двигателей. К этим недостаткам относятся:
- Трение щеток скольжения вдоль вращающихся сегментов коллекторных вызывает потерю мощности , которые могут быть существенными в двигателе малой мощности.
- Материал мягкой щетки изнашивается из-за трения, образуя пыль, и в конечном итоге щетки необходимо заменить. Это делает коммутируемые двигатели непригодными для приложений с низким содержанием твердых частиц или герметичных устройств, таких как двигатели с жесткими дисками , а также для приложений, требующих работы без обслуживания.
- Электрическое сопротивление скользящего контакта щетки вызывает падение напряжения в цепи двигателя, называемое падением щетки, которое потребляет энергию.
- Повторяющееся резкое переключение тока через индуктивность обмоток вызывает искры на контактах коммутатора, что является опасностью возгорания во взрывоопасных средах и источником электронного шума , который может вызывать электромагнитные помехи в близлежащих микроэлектронных схемах.

За последние сто лет на смену мощным щеточным электродвигателям постоянного тока, когда-то являвшимся основой промышленности, пришли синхронные электродвигатели переменного тока (AC) . Сегодня щеточные двигатели используются только в приложениях с низким энергопотреблением или там, где доступен только постоянный ток, но вышеупомянутые недостатки ограничивают их использование даже в этих приложениях.
Сегодня щеточные двигатели используются только в приложениях с низким энергопотреблением или там, где доступен только постоянный ток, но вышеупомянутые недостатки ограничивают их использование даже в этих приложениях.
Бесщеточный раствор
Развитие полупроводниковой электроники в 1970-х годах позволило отказаться от коммутатора в двигателях постоянного тока, а также щеток в двигателях с постоянными магнитами. В бесщеточных двигателях постоянного тока электронная сервосистема заменяет механические контакты коммутатора. Электронный датчик определяет угол поворота ротора и управляет полупроводниковыми переключателями, такими как транзисторы, которые переключают ток через обмотки, либо меняя направление тока на противоположное, либо в некоторых двигателях выключают его, в нужное время при каждом повороте вала на 180 °, чтобы электромагниты создать крутящий момент в одном направлении. Исключение скользящего контакта позволяет бесщеточным двигателям иметь меньшее трение и более длительный срок службы; их срок службы ограничен только сроком службы подшипников .
Щеточные двигатели постоянного тока развивают максимальный крутящий момент в неподвижном состоянии, линейно уменьшающийся с увеличением скорости. Некоторые ограничения щеточных двигателей можно преодолеть с помощью бесщеточных двигателей; они включают более высокую эффективность и меньшую подверженность механическому износу. Эти преимущества достигаются за счет потенциально менее прочной, более сложной и более дорогой управляющей электроники.
Типичный бесщеточный двигатель имеет постоянные магниты, которые вращаются вокруг фиксированного якоря , что устраняет проблемы, связанные с подключением тока к движущемуся якорю. Электронный контроллер заменяет узел щеток / коллектора щеточного двигателя постоянного тока, который постоянно переключает фазу на обмотки, чтобы двигатель вращался. Контроллер выполняет аналогичное синхронизированное распределение мощности, используя твердотельную схему, а не систему щеток / коммутаторов.
Бесщеточные двигатели имеют ряд преимуществ по сравнению с щеточными двигателями постоянного тока, включая высокое отношение крутящего момента к массе, больший крутящий момент на ватт (повышенный КПД), повышенную надежность, снижение шума, более длительный срок службы (отсутствие эрозии щеток и коллектора), устранение ионизирующих искр от коллектора, и общее снижение электромагнитных помех (EMI). При отсутствии обмоток на роторе они не подвергаются центробежным силам, а поскольку обмотки поддерживаются корпусом, они могут охлаждаться за счет теплопроводности, не требуя для охлаждения воздушного потока внутри двигателя. Это, в свою очередь, означает, что внутренние части двигателя могут быть полностью закрыты и защищены от грязи или других посторонних предметов.
При отсутствии обмоток на роторе они не подвергаются центробежным силам, а поскольку обмотки поддерживаются корпусом, они могут охлаждаться за счет теплопроводности, не требуя для охлаждения воздушного потока внутри двигателя. Это, в свою очередь, означает, что внутренние части двигателя могут быть полностью закрыты и защищены от грязи или других посторонних предметов.
Коммутация бесщеточного двигателя может быть реализована программно с использованием микроконтроллера или микропроцессорного компьютера или, альтернативно, может быть реализована с использованием аналоговых или цифровых схем. Коммутация с помощью электроники вместо щеток обеспечивает большую гибкость и возможности, недоступные для щеточных двигателей постоянного тока, включая ограничение скорости, «микрошаговый» режим для управления медленным и точным движением и удерживающий момент в неподвижном состоянии. Программное обеспечение контроллера можно настроить для конкретного двигателя, используемого в приложении, что повысит эффективность коммутации.
Максимальная мощность, которую можно приложить к бесщеточному двигателю, почти полностью ограничивается нагревом; слишком большое количество тепла ослабляет магниты и может повредить изоляцию обмоток.
При преобразовании электричества в механическую энергию бесщеточные двигатели более эффективны, чем щеточные. Это улучшение в значительной степени связано с частотой переключения электричества, определяемой обратной связью датчика положения. Дополнительный выигрыш связан с отсутствием щеток, что снижает потери механической энергии из-за трения. Повышенный КПД является максимальным в области холостого хода и низкой нагрузки характеристики двигателя. При высоких механических нагрузках бесщеточные двигатели и высококачественные щеточные двигатели сопоставимы по эффективности.
Среды и требования, в которых производители используют бесщеточные двигатели постоянного тока, включают работу, не требующую обслуживания, высокие скорости и работу, в которой искрение является опасным (например, взрывоопасная среда) или может повлиять на электронно-чувствительное оборудование.
Конструкция бесщеточного двигателя напоминает шаговый двигатель, но двигатели имеют важные отличия из-за различий в реализации и работе. В то время как шаговый двигатель часто останавливается, когда ротор находится в определенном угловом положении, бесщеточный двигатель обычно предназначен для непрерывного вращения. Оба типа двигателей могут иметь, но обычно не включают датчик положения ротора для внутренней обратной связи. В качестве шагового двигателя хорошо спроектированный бесщеточный двигатель может поддерживать конечный крутящий момент при нулевых оборотах.
Реализации контроллера
Поскольку контроллер реализует функции традиционных щеток, ему требуется ориентация / положение ротора (относительно катушек статора ). Это происходит автоматически в щеточном двигателе из-за фиксированной геометрии вала ротора и щеток. В некоторых конструкциях используются датчики на эффекте Холла или угловой энкодер для прямого измерения положения ротора. Другие измеряют обратную ЭДС в неприводных катушках для определения положения ротора, устраняя необходимость в отдельных датчиках эффекта Холла, и поэтому их часто называют бессенсорными контроллерами.
Типичный контроллер содержит три двунаправленных выхода (например, трехфазный выход с частотным регулированием), которые управляются логической схемой. В простых контроллерах используются компараторы, чтобы определить, когда следует увеличить выходную фазу, в то время как более совершенные контроллеры используют микроконтроллер для управления ускорением, скоростью управления и точной настройки эффективности.
Контроллеры, которые определяют положение ротора на основе обратной ЭДС, имеют дополнительные проблемы при инициировании движения, потому что обратная ЭДС не возникает, когда ротор неподвижен. Обычно это достигается путем начала вращения с произвольной фазы, а затем перехода к правильной фазе, если обнаруживается, что это неверно. Это может вызвать кратковременное вращение двигателя в обратном направлении, что еще больше усложнит последовательность запуска. Другие бессенсорные контроллеры могут измерять насыщение обмотки, вызванное положением магнитов, для определения положения ротора.
Двумя ключевыми параметрами производительности бесщеточных двигателей постоянного тока являются постоянные двигателя ( постоянная крутящего момента) и ( постоянная противо-ЭДС, также известная как постоянная скорости ).
KТ{\ displaystyle K_ {T}}Kе{\ displaystyle K_ {e}}KVзнак равно1Kе{\ displaystyle K_ {V} = {1 \ over K_ {e}}}
Варианты конструкции
Бесконтактные постоянного тока вентильные
Устройства состоят из датчика углового положения ротора, а также из полупроводникового коммутатора. В зависимости от функциональных особенностей и назначения, различают три вида:
- со стабилизацией частоты вращения;
- силовые;
- управляемые.
Бесконтактные вентильные устройства постоянного тока обладают рядом очень важных функциональных характеристик. Такой вид эд обладает широким диапазоном изменения скорости вращения, что позволяет использовать их во многих электротехнических устройствах.
В отличие от коллекторных электродвигателей, бесконтактные электрические машины не обладают коллекторно–щёточным узлом. Наличие коллекторно–щёточного узла может спровоцировать некоторые помехи, а также может требовать частого технического обслуживания.
Наличие коллекторно–щёточного узла может спровоцировать некоторые помехи, а также может требовать частого технического обслуживания.
Рассматриваемые устройства обладают коэффициентом полезного действия более чем 90%. Также, такие приборы способны долго и бесперебойно работать, их наработка составляет более 30000 часов. Бесконтактные приборы отличаются высокой надёжностью, даже после долгого перерыве в работе, отмечается надёжный и удачный запуск.
Одним из очень важных преимуществ заключается в том, что их можно использовать практически в любой среде. Допускается применение в местах с низким давлением, а также в пожаро — и взрывоопасных зонах.
В бесконтактных эд отсутствуют скользящие электрические контакты, что обуславливает длительный срок эксплуатации двигателя и его надёжность.
Однако наряду с огромным количеством важных достоинств, бесконтактные эд также обладают некоторыми недостатками. Такой вид оснащён сложной системой управления, а также цена на бесконтактные двигатели достаточно высока. Например, асинхронные или коллекторные электродвигатели стоят намного дешевле. Но, несмотря на различия в стоимости, они являются аналогами асинхронных электродвигателей по их функциональности. Различие состоит лишь в том, что эти не создают помех и дополнительного шума, а также являются более надёжными.
Например, асинхронные или коллекторные электродвигатели стоят намного дешевле. Но, несмотря на различия в стоимости, они являются аналогами асинхронных электродвигателей по их функциональности. Различие состоит лишь в том, что эти не создают помех и дополнительного шума, а также являются более надёжными.
В настоящее время наблюдается возрастающая популярность к данным приборам. Их широко используют в многочисленных отраслях промышленности и в некоторых других сферах. Наиболее часто их используют в бытовой технике, инвалидных креслах–колясках, аппаратах искусственной вентиляции лёгких, медицинских кроватях и рельсовом транспорте.
Электротехнический завод «МиассЭлектроАппарат» гарантирует качество и надёжную эксплуатацию, производимых заводом электродвигателей. Предприятие обладает международными и российскими сертификатами, что позволяет давать гарантию на свою продукцию более чем на 3 года. Купить электродвигатели бесконтактные постоянного тока в Челябинске, Миассе, Троицке, Карталах, Снежинске, Магнитогорске, Копейске вы можете на сайте завода или по номеру телефона.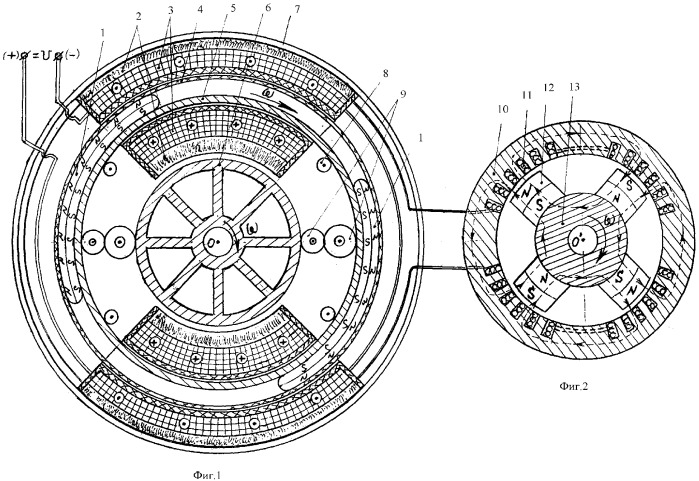
Беговая дорожка с регулируемой скоростью Двигатель постоянного тока
Ознакомившись с различными потенциальными модификациями, я решил, что двигатель постоянного тока должен появиться довольно рано по нескольким причинам. Во-первых, это выглядит довольно простой модификацией — конечно, не в той же лиге, что и создание делительной головки или замена ходового винта! Во-вторых, есть большая отдача. Я действительно думаю, что получение точного контроля оборотов при простом повороте знаний облегчит получение максимальной отдачи от моего азиатского токарного станка.Завершив модификацию, могу сказать, что она великолепна! Возможность изменять скорость поворотом циферблата — мечта. Вы можете повернуть на высокой скорости, пока не приблизитесь к плечу, а затем замедлиться, чтобы получилось правильно. Если начинается болтовня, измените скорость, и она исчезнет. Начните медленнее, чтобы выполнить черновой рез, а затем увеличьте его, чтобы получить чистую отделку на последнем проходе. Это действительно добавляет много преимуществ токарному станку, и моя обработка поверхности даже лучше, чем была раньше. Настоятельно рекомендуется!
Это действительно добавляет много преимуществ токарному станку, и моя обработка поверхности даже лучше, чем была раньше. Настоятельно рекомендуется!
Прежде чем я углублюсь в подробности, позвольте мне сказать, что меня действительно вдохновили все статьи о модификации токарного станка, которые я читал.Я не изобретал этот мод, я во многом скопировал работы других. Обязательно читайте их статьи в Интернете, и вы многому научитесь. Я также должен отметить, что есть два лагеря, когда речь идет о двигателях с регулируемой скоростью. В первом используются двигатели постоянного тока с постоянными магнитами, обычно дополнительные двигатели для беговых дорожек. Во втором используются трехфазные двигатели переменного тока и частотно-регулируемый привод (VFD) для управления их скоростью. Справедливо сказать, что последнее ближе к отраслевой практике. Также справедливо сказать, что мы слышим громкий международный голос против подхода к двигателям постоянного тока, потому что по какой-то причине они, похоже, не могут получить контроллеры по разумной цене, которые будут работать с их стандартами питания переменного тока (от сети). Я выбираю беговую дорожку, потому что гораздо дешевле найти эти моторы на eBay, и они отлично подойдут для меня в американских торговых точках.
Я выбираю беговую дорожку, потому что гораздо дешевле найти эти моторы на eBay, и они отлично подойдут для меня в американских торговых точках.
Для привода токарного станка потребуется несколько меньше мощности переменного тока (возможно, 20%), учитывая, как характеристики крутящего момента меняются в зависимости от скорости для двигателя переменного тока по сравнению с двигателем постоянного тока. Для двигателя переменного тока вам нужно что-то около 1 л.с. на одном из этих токарных станков, а для постоянного тока 1,2 было бы идеально. Обратите внимание, что, хотя мой двигатель рассчитан на «2,5 л.с.», это не промышленный рейтинг, и двигатель, вероятно, приближается к 1 л.с. или немного больше.Также обратите внимание на диапазон скоростей двигателя, на который вы смотрите. Большинство этих токарных станков имеют шкивы, близкие к соотношению 1: 1 (обычно 1: 1,2). Определите максимальную желаемую скорость вращения шпинделя и разделите ее на 1,2, чтобы получить приличную оценку того, какая максимальная скорость вам потребуется от вашего двигателя.
Это довольно дешевый мод, когда вы покупаете детали в излишках или на eBay. Посмотрите, что я использую:
| Сырье |
Надежный электрический регулятор скорости двигателя DC-2.1 / 2-2 л.с. 90-180В 10А. Модель № DC-92U. Новый, неиспользованный, с инструкцией.
eBay: 50,00 долларов
На eBay доступно множество контроллеров постоянного тока. Я сделал поиск по запросу «(переменная, контроллер, контроллер) двигатель» и сделал ставку на этот. Проверьте спецификации, чтобы убедиться, что они совместимы с вашим двигателем. У этого также есть изящная функция, заключающаяся в том, что он может управлять скоростью либо с помощью ручки на устройстве, либо с помощью управляющего сигнала. DC-2 — это полностью промышленный контроллер мощности, и если вы заглянете в Google, вы найдете их рекламируемыми как встраиваемые в различное производственное оборудование.
CNC4PC делает небольшую доску, которая позволит вашему программному обеспечению ЧПУ управлять скоростью вашего двигателя. Как это круто? Не уверен, что когда-нибудь воспользуюсь этим. На самом деле я купил два из них, думая, что могу также подключить один к своему сверлильному станку или другой машине.
Новый 2,5 л.с., 130 В постоянного тока, 10 А, 4500 об / мин, вращение по часовой стрелке, замена беговой дорожки. Это двигатель непрерывного действия с постоянными магнитами.
eBay: 35,00 долларов США
Двигатели постоянного тока
также легко найти на eBay. Я даже не стал искать «двигатель беговой дорожки», хотя многие энтузиасты станков использовали этот тип двигателя.Вам нужно что-то с такими характеристиками мощности и напряжения. Продолжайте, пока не найдете победителя. Как и контроллер, я купил два мотора, чтобы можно было модифицировать какую-нибудь другую машину.
| Планирование модификации токарного станка и понимание контроллера двигателя постоянного тока |
Для данной модификации необходимо выполнить следующие действия:
1. Подключите контроллер постоянного тока к двигателю постоянного тока. Я сделаю это перед установкой двигателя на токарный станок и стендовым запуском, чтобы убедиться, что двигатель и контроллер работают правильно.
Подключите контроллер постоянного тока к двигателю постоянного тока. Я сделаю это перед установкой двигателя на токарный станок и стендовым запуском, чтобы убедиться, что двигатель и контроллер работают правильно.
2. Изготовьте монтажный кронштейн для крепления двигателя к токарному станку.
3. Изготовьте шкив в сборе, чтобы двигатель мог приводить в движение зубчатую передачу токарного станка. Мне нужно решить, модифицировать ли существующий штабель шкивов, сделав невозможным поворот назад, или построить новый штабель специально для этого двигателя. В качестве альтернативы можно модифицировать двигатель постоянного тока, чтобы он соответствовал штабелю шкивов. Когда шаг 3 будет завершен, я смогу использовать токарный станок с регулируемой скоростью.
4.Изготовьте индивидуальную панель управления, подходящую для токарного станка.
Передняя панель собирается сниматься…
К счастью, у меня есть руководство, но я все же хотел внимательно его изучить и решить, какие функции использовать и как их использовать. Когда все сказано и сделано, мне нужна панель управления со следующими функциями:
Когда все сказано и сделано, мне нужна панель управления со следующими функциями:
— Вкл / Выкл: в этом контроллере используется трехпозиционный переключатель, положения которого запускают двигатель (мгновенный контакт), позволяют ему работать (среднее нейтральное положение) и останавливают двигатель (полностью опускаются и выключены).
— Быстрый набор: бесступенчатый потенциометр.
— Толчок: кратковременный контакт, который просто ударяет по шпинделю, когда его удерживают. У меня не было возможности использовать эту функцию, но, похоже, большинство людей ее включают.
— Реверс: переключатель для реверсирования контактов, чтобы двигатель работал в обратном направлении. Примечание: некоторые элементы управления имеют модную версию с электронным торможением. Для моего контроллера существуют всевозможные предупреждения о том, что вам нужно остановить двигатель перед реверсированием.
Я хочу, чтобы мои органы управления находились на панели, максимально приближенной к стандартной панели управления токарного станка, и я хочу сохранить предохранительные блокировки. Самый простой способ сделать это — переместить элементы управления из блока контроллера мотора на недавно изготовленную панель, которая поместится на складе. Придется посмотреть зазоры, но если бы пришлось, я бы пожертвовал функцией толчка. Когда все будет готово, я хочу, чтобы все выглядело как работа заводского качества, а не просто то, что врезалось в токарный станок.При изготовлении кабелей руководство к контроллеру рекомендует витую проволоку №16 AWG.
Самый простой способ сделать это — переместить элементы управления из блока контроллера мотора на недавно изготовленную панель, которая поместится на складе. Придется посмотреть зазоры, но если бы пришлось, я бы пожертвовал функцией толчка. Когда все будет готово, я хочу, чтобы все выглядело как работа заводского качества, а не просто то, что врезалось в токарный станок.При изготовлении кабелей руководство к контроллеру рекомендует витую проволоку №16 AWG.
Я, скорее всего, незаметно расположу контроллер за токарным станком, где он находится вне поля зрения и вне поля зрения. Если возможно, я думаю, что со временем я изготовлю кронштейн для установки контроллера, обращенный назад за мотором, возможно, вверх ногами (выходы кабеля находятся на дне коробки!). Такой же кронштейн будет установлен для размещения УЦИ. Пока я не построю указанное УЦИ, я просто оставлю контроллер без кронштейна, лежащий на столе за токарным станком.
Для тестирования я просто воспользуюсь элементами управления на передней панели УЦИ и заставлю все работать как есть. Таким образом, я могу использовать токарный станок, чтобы обработать шкив под двигатель.
Таким образом, я могу использовать токарный станок, чтобы обработать шкив под двигатель.
Внутренние части DC-2…
Давайте рассмотрим внутренние соединения DC-2. Рядом с центром печатной платы есть большая черная клемма черного цвета, а внизу — ряд из трех коричневых блоков меньшего размера:
Черная клеммная колодка Слева направо | |
| A1 | Выход постоянного тока |
| A2 / F2 | Выход постоянного тока |
| 51 | Не используется |
| L1 | Вход переменного тока |
| L2 / F1 | Вход переменного тока |
Коричневая клеммная колодка Слева направо, средний блок | ||
| 32 | Моторный термостат: перемычка на 132, так как у нас нет термостата.  | |
| 132 | В проводке для запуска / останова / толчкового режима используются эти три элемента: | |
| 35 | ||
| 38 | ||
| 419 | ||
| 519 | ||
| 326 | Потенциометр регулировки скорости 5 кОм: Левый = 156, Правый = 157, Стеклоочиститель = 326. | |
| 156 | ||
| 157 | ||
| 126 | ||
После подключения различных входов / выходов и управления, необходимо рассмотреть ряд перемычек, чтобы правильно настроить контроллер для нашего приложения. Они делают такие вещи, как установка диапазона напряжения и силы тока, а также изменение различных параметров управления.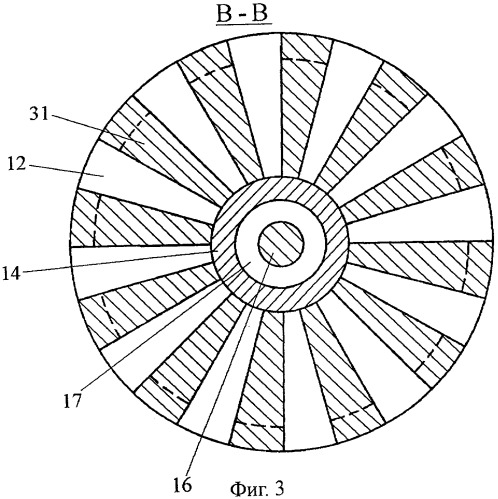 И, наконец, есть ряд подстроечных горшков, которые можно отрегулировать с помощью отвертки.Установите минимальную скорость, максимальную скорость и ускорение, просто возясь с подстроечными колесами и экспериментируя с двигателем.
И, наконец, есть ряд подстроечных горшков, которые можно отрегулировать с помощью отвертки.Установите минимальную скорость, максимальную скорость и ускорение, просто возясь с подстроечными колесами и экспериментируя с двигателем.
На случай, если мне когда-нибудь понадобится вернуть двигатель переменного тока, вот соединения…
| Интерфейс контроллера постоянного тока к двигателю постоянного тока и тест |
Шнур питания переменного тока:
Я отрезал женский конец от запасного компьютерного шнура питания, который у меня был, проделал его в нижнюю часть коробки контроллера, завязал узел на шнуре для снятия натяжения (не хотел бы терять клеммы и иметь постоянный переменный ток, прыгающий вокруг внутри этого ящика!), залудил концы проводов, а затем прикрепил к трем проводам несколько обжимных лопаток.В целях безопасности я заземлил к корпусу и подключил два других проводника к клеммам L1 / L2 черной клеммной колодки.
Подключение двигателя постоянного тока:
Я использовал шнур лампы, чтобы убедиться, что у меня есть провод с приличной токовой нагрузкой, припаял лопатки с обоих концов, завязал узел разгрузки от натяжения внутри коробки контроллера, и вуаля! Я был связан.
Тестовый прогон:
Учитывая, что я купил эти компоненты на eBay, имело смысл протестировать их в начале этого проекта, прежде чем я потратил на них много времени.На данном этапе действительно легко проверить мотор, и я должен сказать, что был очень доволен, когда он загорелся. Заводские настройки по умолчанию для регуляторов дифферента таковы, что ускорение и замедление установлены на самое медленное. Это означает, что по мере того, как вы поворачиваете регулятор скорости, двигатель медленно дросселируется до установленной вами точки. Я немного подправил горшки, чтобы сделать их более отзывчивыми. В частности, я хотел, чтобы замедление происходило довольно быстро, если я хочу замедлить двигатель. Еще я повозился с минимальной и максимальной скоростью.По умолчанию двигатель почти не вращался, что не было похоже на то, что действительно работает на токарном станке. Я набирал минимум 30-40 оборотов в минуту. Точно так же максимальная скорость составляет 4000 об / мин, и это на токарном станке, у которого старый двигатель имел максимальную скорость 1725 об / мин. 4000 мне показалось многовато, поэтому я тоже немного уменьшил его. Это делает доступным и пригодным для использования весь диапазон панели быстрого набора.
| Изготовить монтажный кронштейн двигателя |
Это была простая задача, включающая использование алюминиевого ложа, моей горизонтальной ленточной пилы, моего сверлильного станка и походов в строительный магазин для покупки гаек, болтов и шайб подходящего размера.
Снимите заводской двигатель и измерьте:
Теперь у вас есть возможность измерить заводской двигатель, как для его крепления, так и для размеров шкива и вала, которые необходимо будет согласовать.
Изготовить монтажный кронштейн:
У меня была алюминиевая пластина толщиной 1/4 дюйма вместе с некоторыми 3/16 дюймами, которые я использовал для изготовления кронштейна двигателя. Я вырезал квадрат 5 1/2 дюйма из толстого материала, просверлил два отверстия для отверстий для крепления двигателя посередине и четыре отверстия, соответствующие токарному станку по углам.Затем я взял более тонкий материал и сделал пару боковых пластин, которые держатся за угловые отверстия в большой пластине сверху и снизу. Это было быстро и легко. Если бы мне пришлось сделать это второй раз, я бы сделал либо верхние, либо нижние отверстия большего размера, чтобы сделать выравнивание менее требовательным для начала. Вы можете увидеть, как это выглядит (по крайней мере частично) внизу.
Примечание : Обязательно прочтите приведенное ниже обновление о том, как я переделал крепления двигателя, чтобы они были более прочными, и их было легче устанавливать и удалять.
Изготовить пылезащитный чехол:
Здесь я следовал запатентованному Cletus Berkeley методу горячего приклеивания чистящих салфеток к охлаждающим отверстиям двигателя, чтобы не допустить попадания стружки. Горячий клей не будет хорошо держаться, если вы не очистите двигатель изопропиловым спиртом, чтобы удалить все следы масла, а затем дважды приклейте его. Другими словами, нанесите клей и на двигатель, и на колодки, чтобы клей мог прилипать к себе, когда вы их соединяете. Вы можете увидеть, как это выглядит внизу.
| Адаптируйте шкив к двигателю постоянного тока |
Это было немного обидчиво.На токарных станках шкив ГРМ имеет большее отверстие, чем двигатели беговой дорожки. Я решил отказаться от блока шкивов, который сидит на двигателе, и привода от промежуточного вала. Этот двигатель имеет множество оборотов в минуту, но ему не хватает крутящего момента по сравнению с двигателем фактора. Промежуточный вал дает соотношение 2: 1, чтобы помочь в этом. Это означало, что мне нужно было только установить шкив ГРМ.
Я решил намотать на шкив привода ГРМ какую-нибудь медную трубку, которую я имел, чтобы он был более концентрическим на валу:
Гильза и укороченная шпонка…
Я также укоротил шпонку, чтобы она проходила только под шкивом ГРМ.Затем я хотел сделать концевые части, которые шли бы по обе стороны от шкива, чтобы ремень оставался на месте, и правильно расположить шкив на валу. В качестве временной меры я обработал эти детали, используя только набор шайб и обычное кольцо вала, чтобы удерживать шкив ГРМ на месте:
Временная установка для обработки проставок шкивов. Также можно увидеть монтажные пластины…
Временная установка позволила мне поэкспериментировать с интервалом, пока я не добился нужного результата.Некоторые конфигурации, казалось, заставляли ремень сходить с конца. Я скосил проставки, чтобы они вернули ремень в центр.
Прокладка со скосом…
Последнее, что я сделал, это вставил 2 установочных винта в шкив ГРМ. Я кладу их под углом 90 градусов друг к другу. Требовалось немного подправить установочные винты, чтобы убедиться, что они не выступают на пути ремня, и я также был осторожен, чтобы отпилить любые заусенцы.
Центровочное отверстие для установочного винта шкива. Вы сверлите все отверстия по центру, не так ли?
Просверлено # 7 перед нарезанием резьбы 1 / 4-20 моим метчиком с пилотным управлением…
Готовый двигатель с обработанными проставками шкивов и пылезащитными крышками…
На данном этапе все работает плавно и тихо, поэтому я вполне доволен расположением шкивов. Мне нужно на днях подумать о том, чтобы изготовить для него красивую индивидуальную панель, которая поместится на складе.А пока я просто хочу проехать несколько миль, чтобы убедиться, что он работает хорошо. Я, вероятно, побеспокоюсь о панели, когда придет время устанавливать УЦИ и тахометр.
Обновление
| : сломанные крепления двигателя |
Хорошо, кто на моем токарном станке повернул задом наперед!
Ну, этот мод продержался у меня целых 2 года, но в итоге я сломал крепление мотора. Я начал замечать вибрацию в определенных диапазонах скоростей около средних 2/3 диапазона.Казалось, что если я разгонюсь до максимальной скорости, а затем уменьшу ее, вибрация исчезнет. Я списал это на какой-то странный резонансный эффект и научился с этим жить. В конце концов, вибрация становилась все хуже и хуже, пока токарный станок не пришел в негодность. На этом этапе я искренне переживал, что в шпинделе поджарились подшипники.
Чтобы легко добраться до опор двигателя, нужно многое убрать…
Итак, я начал смотреть на это и в конце концов заметил, что зубчатый ремень ГРМ кажется немного слишком ослабленным.Присмотревшись, я решил, что, конечно же, он слишком болтается, и я заметил значительный люфт в двигателе — он не был надежно установлен! Моей первой реакцией было огромное облегчение, что я не собирался заменять подшипники шпинделя. Вторым было раздражение. В первый раз было сложно попасть в двигатель, и для правильной выверки и затяжки болтов требовалось около четырех маленьких ручек.
Сломан крепежный болт. Вы можете видеть, что двигатель опирался на два узких края, а также на болты: нужно немного распределить нагрузку!
Когда я все это разобрал, я обнаружил, что дело не только в ослаблении болтов из-за вибрации.Один из двух болтов, которыми корпус двигателя крепится к алюминиевому креплению, полностью сломался внутри корпуса. Ага, говорю я! Мне нужно будет сделать крепление двигателя получше, чтобы этого больше не повторилось. В то же время я хотел, чтобы было легче запускать и снимать двигатель с токарного станка. К этому времени у меня теперь была мельница, а не просто сверлильный станок, так что исправить ситуацию было несложно.
Первое, что я сделал, что я должен был сделать, когда впервые взялся за эту модификацию, — это преобразовать болтовое крепление рамы токарного станка на использование шпилек.Я просто срезал головки болтов, которые у меня были, с помощью угловой шлифовальной машины и отрезного круга, слегка прикоснулся к ним на шлифовальном станке, а затем надел гайку примерно на треть вверх на каждый и зафиксировал гайки на месте с помощью очень прочных красный локтит. После высыхания я мог приложить гаечный ключ к гайкам, чтобы ввинтить шпильки в раму токарного станка. Это позволило мне установить мотор на пластину и надеть весь узел на шпильки. Теперь установить мотор стало намного проще!
Для изготовления шпильки сначала отрежьте головку…
Затем замкните гайки, чтобы можно было затянуть шпильку…
Шпильки облегчают установку двигателя на монтажную пластину на место…
Второе улучшение: я сделал пару боковых блоков с фрезерованием под углом 45 градусов, чтобы удерживать двигатель, чтобы он не качался вбок.Думаю, такое раскачивание, вероятно, является причиной поломки оригинального крепления двигателя. Боковые блоки имеют фрезерованные пазы, поэтому их можно регулировать, и я плотно прижал их к корпусу двигателя.
Я скрепил всю сборку болтами, и она работает гладко, как шелк!
Будем надеяться, что еще как минимум 2 года эксплуатации, на этот раз под управлением ЧПУ.
Micro Motors — Малые двигатели постоянного тока
Поиск
английский
Deutsch (Deutschland)
английский
português (Бразилия)
한국어 (대한민국)
中文 (中国)
日本語 (日本)
Поиск дистрибьюторов
Поддержка
Свяжитесь с нами
- Продукция
- Бесщеточные двигатели постоянного тока
- Все двигатели BLDC
- Двигатели Ultra EC
- Хирургические двигательные решения
- Щеточные двигатели постоянного тока
- Щеточный двигатель постоянного тока
- Athlonix Motors
- Шаговые двигатели
- Может складывать моторы
- Линейные шаговые двигатели
- Диск Магнит
- Принадлежности
- Редукторы
- Энкодеры
- Диски
- Разное
- новые продукты
- Запчасти
- Инновации в движении
- Бесщеточные двигатели постоянного тока
- Решения
- Удельная мощность
- Эффективность
- Крутящий момент
- Скорость
- Моторная стерилизация
- Точность и аккуратность
- Приложения
- Электроинструменты хирургические
- Хирургические развертки
- Силовые тренажеры для нейро / позвоночника
- Хирургические сверла
- Хирургические пилы
- Артроскопические бритвы
- Хирургические степлеры
- Дебридеры с приводом от ЛОР
- Хирургические роботы
- Устройства для пластической хирургии
- Электрические хирургические отвертки
- Одноразовые хирургические инструменты
- Медицинский
- Респираторные и вентиляционные устройства
- Лучевая терапия
- Лабораторная автоматизация
- Системы биопсии
- Медицинские пипетки
- Устройства для лечения заболеваний периферических артерий
- Пистолеты для мезотерапии
- Экзоскелет
- Ультразвуковые преобразователи
- Стоматологические сверла
- Стоматологическая эндодонтия
- Стоматологические фрезерные станки CAD / CAM
- Инфузионные системы
- Инсулиновые насосы
- Домашние инфузионные насосы
- Больничные инфузионные насосы
- Автоинжекторы
- Амбулаторные насосы для внутреннего кормления
- Промышленные электроинструменты
- Электрические отвертки
- Nutrunners
- Электрические захваты
- Секаторы
- Электроинструменты
- Гвоздезабиватели и рамные системы
- Аккумуляторные дрели
- Клиническая диагностика
- Медицинские анализаторы
- Диагностические анализаторы
- Микроскопы
- Пипетки
- Рабочие станции для подготовки образцов
- Миниатюрные насосы
- Робототехника
- LiDar
- Хирургическая робототехника
- Бионика и экзоскелеты
- Электрические захваты
- Сервисная робототехника
- Аэрокосмическая промышленность
- Приведение в действие сиденья
- Оконные шторы
- Системы камер наблюдения
- Клапаны
- Автоматизация / Робототехника
- Обнаружение газа и личная безопасность
- Выбрать и разместить
- Гуманоидный робот
- Электронные системы доступа
- Системы камер наблюдения
- Обработка материалов
- Системы дозирования и дозирования
- Текстильная пряжа
- Конвейерные системы
- Землеустройство
- Инфракрасная термография
- Автоматизированный контроль оптики
- Другое
- Роторные тату-машины
- Сценическое освещение
- Срабатывание заслонки
- Холодильное оборудование
- Автоматический завод часов
- Бурение и добыча нефти
- Электроинструменты хирургические
Бесщеточный двигатель постоянного тока: AC MOTORS
Том II — AC »ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Бесщеточные двигатели постоянного тока были разработаны на основе обычных щеточных двигателей постоянного тока с использованием твердотельных силовых полупроводников.Итак, почему мы обсуждаем бесщеточные двигатели постоянного тока в главе, посвященной двигателям переменного тока? Бесщеточные двигатели постоянного тока аналогичны синхронным двигателям переменного тока. Основное отличие заключается в том, что синхронные двигатели развивают синусоидальную обратную ЭДС по сравнению с прямоугольной или трапециевидной обратной ЭДС для бесщеточных двигателей постоянного тока. В обоих статор создает вращающиеся магнитные поля, создающие крутящий момент в магнитном роторе.
Синхронные двигатели обычно имеют большую мощность в несколько киловатт, часто с электромагнитными роторами. Истинные синхронные двигатели считаются односкоростными, составляющими частоту, равную частоте сети.Бесщеточные двигатели постоянного тока обычно имеют небольшие размеры — от нескольких ватт до десятков ватт, с роторами с постоянными магнитами. Скорость двигателя бесщеточный постоянного тока не фиксируется, если не приводится в действие поэтапно запертой петли скорректированный опорной частоты. Стиль постройки либо цилиндрический, либо блинный. (Фигуры
и ниже)
Цилиндрическая конструкция: (а) внешний ротор, (б) внутренний ротор.
Самая обычная конструкция, цилиндрическая, может иметь две формы (рисунок выше).Чаще всего используется цилиндрический тип, когда ротор находится внутри, справа вверху. Двигатель этого типа используется в жестких дисках. Также возможно размещение ротора снаружи вокруг статора. Так обстоит дело с бесщеточными двигателями вентиляторов постоянного тока без вала. Такая конструкция может быть короткой и толстой. Однако направление магнитного потока радиально по отношению к оси вращения.
Конструкция двигателя-блинчика: (а) одинарный статор, (б) двойной статор.
Двигатели-блины с высоким крутящим моментом могут иметь обмотки статора с обеих сторон ротора (рис. B).
Для применений с низким крутящим моментом, таких как двигатели дисководов гибких дисков, достаточно катушки статора на одной стороне ротора (рисунок выше-a). Направление магнитного потока осевое, то есть параллельно оси вращения.
Функцию коммутации могут выполнять различные датчики положения вала: оптический энкодер, магнитный энкодер (резольвер, синхронизатор и т. Д.) Или магнитные датчики на эффекте Холла.В небольших недорогих двигателях используются датчики на эффекте Холла. (Рисунок ниже) Датчик на эффекте Холла — это полупроводниковое устройство, в котором на поток электронов действует магнитное поле, перпендикулярное направлению тока. Он выглядит как четырехконтактная сеть переменного резистора. Напряжения на двух выходах дополняют друг друга. Приложение магнитного поля к датчику вызывает небольшое изменение напряжения на выходе. Выход Холла может управлять компаратором, чтобы обеспечить более стабильную работу силового устройства.Или он может управлять составным транзисторным каскадом при правильном смещении. Более современные датчики на эффекте Холла могут содержать интегрированный усилитель и цифровую схему. Это трехпроводное устройство может напрямую управлять силовым транзистором, питающим фазную обмотку. Датчик должен быть установлен рядом с ротором с постоянным магнитом, чтобы определять его положение.
Датчики на эффекте Холла переключают трехфазный бесщеточный двигатель постоянного тока.
Простой цилиндрический 3-фазный двигатель, показанный на рисунке выше, коммутируется устройством на эффекте Холла для каждой из трех фаз статора.Изменяющееся положение ротора с постоянным магнитом воспринимается устройством Холла по мере изменения полярности проходящего полюса ротора. Этот сигнал Холла усиливается, так что катушки статора управляются правильным током. Здесь не показано, сигналы Холла могут обрабатываться комбинаторной логикой для более эффективных форм сигнала возбуждения.
Вышеупомянутый цилиндрический двигатель мог бы управлять жестким диском, если бы он был оснащен фазированной автоподстройкой частоты (PLL) для поддержания постоянной скорости. Подобная схема могла управлять двигателем дисковода для гибких дисков (рисунок ниже).Опять же, для поддержания постоянной скорости потребуется ФАПЧ.
Блинный бесщеточный мотор
Блинный двигатель с 3 фазами (рисунок выше) имеет 6 полюсов статора и 8 полюсов ротора. Ротор представляет собой плоское ферритовое кольцо с восемью намагниченными в осевом направлении чередующимися полюсами. Мы не показываем, что ротор закрыт пластиной из мягкой стали для крепления к подшипнику в середине статора. Стальная пластина также помогает завершить магнитную цепь. Полюса статора также установлены на стальной пластине, что помогает замкнуть магнитную цепь.Катушки плоского статора имеют трапециевидную форму, чтобы лучше прилегать к катушкам и приблизительно равняться полюсам ротора. Катушки с 6 статорами содержат три фазы обмотки.
Если бы три фазы статора были последовательно запитаны, возникло бы вращающееся магнитное поле. Ротор с постоянным магнитом будет таким же, как и в случае синхронного двигателя. Двухполюсный ротор будет следовать за этим полем с той же скоростью, что и вращающееся поле. Однако наш 8-полюсный ротор будет вращаться с кратной этой скоростью из-за дополнительных полюсов в роторе.
Бесщеточный двигатель вентилятора постоянного тока (рисунок ниже) имеет следующие особенности:
Бесщеточный двигатель вентилятора, 2-φ.
- Статор имеет 2 фазы, распределенные между 4 полюсами
- Имеются 4-выступающие полюса без обмоток для исключения точек нулевого момента.
- Ротор имеет четыре главных полюса привода.
- Ротор имеет 8 полюсов, наложенных друг на друга, чтобы помочь устранить точки нулевого крутящего момента.
- Датчики на эффекте Холла расположены под углом 45 o физ.
- Корпус вентилятора размещен на роторе, который расположен над статором.
Целью бесщеточного двигателя вентилятора является минимизация стоимости производства. Это является стимулом для перехода продуктов с более низкими характеристиками из конфигурации 3-φ в конфигурацию 2-φ. В зависимости от того, как он приводится в движение, его можно назвать четырехфазным двигателем.
Вы можете вспомнить, что обычные двигатели постоянного тока не могут иметь четное количество полюсов якоря (2,4 и т. Д.), Если они должны быть самозапускающимися, обычно 3,5,7.Таким образом, гипотетический 4-полюсный двигатель может остановиться при минимальном крутящем моменте, когда он не может быть запущен из состояния покоя. Добавление четырех небольших выступающих полюсов без обмоток накладывает пульсацию крутящего момента на кривую зависимости крутящего момента от положения. Когда этот пульсирующий крутящий момент добавляется к нормальной кривой крутящего момента под напряжением, в результате минимумы крутящего момента частично удаляются. Это позволяет запускать двигатель во всех возможных положениях остановки. Добавление восьми постоянных магнитных полюсов к нормальному 4-полюсному ротору с постоянными магнитами накладывает небольшой пульсирующий момент второй гармоники на нормальный 4-полюсный пульсирующий момент.Это дополнительно устраняет минимумы крутящего момента. Пока минимальный крутящий момент не упадет до нуля, мы сможем запустить двигатель. Чем успешнее мы удаляем минимумы крутящего момента, тем легче запускается двигатель.
Для статора 2-φ требуется, чтобы датчики Холла были разнесены друг от друга на 90 o электрических. Если бы ротор был 2-полюсным ротором, датчики Холла были бы размещены на 90 o физических. Поскольку у нас есть 4-полюсный ротор с постоянными магнитами, датчики должны быть размещены на 45 o физических, чтобы достичь электрического расстояния 90 o .Обратите внимание на расстояние между холлами выше. Большая часть крутящего момента возникает из-за взаимодействия внутренних катушек 2-φ статора с 4-полюсной секцией ротора. Кроме того, 4-полюсная секция ротора должна быть внизу, чтобы датчики Холла воспринимали правильные сигналы коммутации. 8-полюсная роторная секция предназначена только для улучшения запуска двигателя.
Бесщеточный двигатель постоянного тока 2-фазный двухтактный привод.
На рисунке выше двухтактный привод 2-φ (также известный как привод 4-φ) использует два датчика Холла для управления четырьмя обмотками.Датчики расположены на расстоянии 90 o друг от друга, что составляет 90 o физических для однополюсного ротора. Поскольку датчик Холла имеет два дополнительных выхода, один датчик обеспечивает коммутацию двух противоположных обмоток.
Что такое двигатели постоянного тока и как меняются определения? Резюме для инженеров
Обновлено в мае 2019 г. || Двигатели Dc — это движущиеся компоненты, которые принимают электрическую энергию в виде постоянного тока (или некоторой управляемой формы постоянного тока) и преобразуют ее в механическое вращение.Двигатели делают это за счет использования магнитных полей, которые возникают от электрических токов, чтобы стимулировать вращение ротора, закрепленного на выходном валу. Выходной крутящий момент и скорость зависят от входной мощности и конструкции двигателя.
Электродвигатель постоянного тока — это электрическая машина, преобразующая электрическую энергию в механическую.
Согласно наиболее распространенным в настоящее время отраслевым соглашениям об именах, существует три подтипа двигателей постоянного тока: щеточные двигатели постоянного тока, двигатели постоянного тока с постоянными магнитами (PM) и универсальные двигатели постоянного тока.Как мы увидим, есть некоторые оговорки и подклассы.
Во многих более крупных двигателях постоянного тока все еще используются щетки и намотанные поля … хотя двигатели с постоянными магнитами преобладают в приложениях с дробной и интегральной мощностью ниже 18 л.с., а двигатели с постоянными магнитами все чаще используются в бесчисленных конструкциях.
Какие бывают двигатели постоянного тока?
Это щеточные серводвигатели постоянного тока Pittman Series 8000.
Некоторые инженеры называют щеточные электродвигатели постоянного тока электродвигателями с обмоткой поля, потому что это намотанная и покрытая лаком катушка из медного провода, создающая электромагнитное поле.Некоторые инженеры также утверждают, что все двигатели постоянного тока являются щеточными двигателями постоянного тока, и что термин «бесщеточный двигатель постоянного тока» является неправильным.
Независимо от термина, существуют двигатели постоянного тока с постоянным магнитом, шунтирующие, последовательные и щеточные двигатели со сложной обмоткой.
Все, кроме первого, используют два тока:
1. Ток через обмотки якоря (ротора) для взаимодействия с магнитным полем статора (для вывода механического вращения) и
2. Ток через обмотки статора для создания рассматриваемого магнитного поля.
Напротив, щеточные двигатели постоянного тока с постоянными магнитами используют:
1. Ток через обмотки якоря (ротора) для взаимодействия с магнитным полем статора (для вывода механического вращения) и
2. Постоянные магниты на статоре для создания рассматриваемого магнитного поля.
Якорь и обмотки возбуждения в двигателе с шунтовой обмоткой соединяются параллельно , поэтому ток возбуждения пропорционален нагрузке на двигатель.
Якорь и обмотки возбуждения в двигателе с последовательной обмоткой соединяются в двигателе серии , поэтому ток проходит только через обмотки возбуждения.
Якорь и обмотки возбуждения в двигателях с составной обмоткой включают как последовательные, так и параллельные обмотки.
Независимо от настройки, щеточные двигатели постоянного тока имеют коммутаторы и щеточные контакты для передачи тока на медные обмотки вращающегося ротора. Разработчики могут контролировать скорость, изменяя напряжение ротора (и связанный с ним ток) или изменяя магнитный поток между ротором и статором, регулируя ток в обмотке возбуждения. Ориентация щетки на сегменты стержня коммутатора ротора механически управляет коммутацией фаз.
Прочтите статью по теме: Что такое двигатели постоянного тока без сердечника?
Фактически, то, как щеточные двигатели постоянного тока позволяют разработчикам управлять обмотками возбуждения и ротора , означает, что они подходят для приложений, требующих простого и экономичного управления крутящим моментом и скоростью.
Тем не менее, повышенная функциональность электроники для двигателей с постоянными магнитами означает, что это преимущество менее выражено, чем было раньше. Что еще хуже, ток как на роторе, так и на статоре выделяет тепло, которое ограничивает номинальные значения постоянного тока двигателей.Двигатели также представляют опасность искры, поэтому их нельзя использовать во взрывоопасных зонах. В определенные периоды вращения двигателя постоянного тока коммутатор должен реверсировать ток, сокращая срок службы двигателя из-за искрения и трения. Таким образом, щеточные электродвигатели постоянного тока требуют большего обслуживания в виде замены пружин и щеток, по которым проходит электрический ток, а также замены или очистки коллектора. Эти компоненты важны для передачи электроэнергии извне двигателя на вращающиеся обмотки ротора внутри двигателя.
Примечание. Щетки в щеточных двигателях постоянного тока изнашиваются и нуждаются в замене, а частицы износа щеток означают, что конструкторам не следует использовать щеточные двигатели постоянного тока в чистых помещениях. То же самое касается приложений, требующих высокой точности, поскольку трение от зацепления щеток-коммутатора приводит к долгому времени установления положения.
Двигатели постоянного тока с последовательной обмоткой
Как уже упоминалось, якорь (ротор) и катушки возбуждения в двигателях с последовательной обмоткой подключаются последовательно. Это означает, что весь ток якоря (ротора) проходит на обмотку возбуждения.Таким образом, этим двигателям требуется только одно входное напряжение. Крутящий момент равен квадрату тока. Увеличение тока якоря (ротора) вызывает увеличение тока возбуждения. Рекуперативное торможение невозможно; ток возбуждения коллапсирует, когда ток ротора проходит через ноль и меняется на противоположное.
Крутящий момент является максимальным, когда двигатель останавливается, потому что якорь (ротор) не создает противоэлектродвижущую силу (bEMF) в состоянии покоя. При ускорении якоря (ротора) бЭДС увеличивается. Это, в свою очередь, снижает эффективный ток, напряжение и крутящий момент.Без нагрузки мотор разгоняется до опасных скоростей. Напротив, увеличение нагрузки замедляет двигатель, но снижает bEMF… и увеличивает крутящий момент для поворота нагрузки.
Двигатели с обмоткой серии
плохо регулируют скорость, так как регулировка скорости зависит от настроек напряжения питания. Даже в этом случае они недороги и могут приводить в движение конструкции, требующие высокого пускового момента. Например, конструкторы используют двигатели с последовательным обмотом в автомобильных механизмах малой и большой мощности, потребительских товарах, таких как электроинструменты, игрушки и швейные машины, а также в промышленных тяговых приводах с фиксированной и регулируемой скоростью.Разработчики могут реверсировать двигатели с последовательной обмоткой, меняя местами соединения обмотки возбуждения или якоря (ротора).
Двигатели постоянного тока с параллельной обмоткой
Как уже упоминалось, якорь и катушки возбуждения в двигателе с параллельной обмоткой подключаются параллельно… поэтому ток возбуждения пропорционален нагрузке на двигатель. Вход переменного напряжения позволяет регулировать скорость. Подайте фиксированное напряжение на двигатель с параллельной обмоткой, чтобы он работал с постоянной скоростью. Затем подайте увеличивающийся ток двигателя на двигатель с параллельной обмоткой, чтобы увеличить крутящий момент без значительного замедления.
В двигателях с параллельной обмоткой обмотка возбуждения (статора) подключается параллельно обмотке якоря (ротора).
В этих двигателях метод, называемый ослаблением поля, позволяет контролировать скорость, не заставляя органы управления изменять входное напряжение. Реостат с обмоткой возбуждения уменьшает ток возбуждения (статора), а вместе с ним и магнитный поток между якорем и полем через воздушный зазор, который их разделяет. Скорость обратно пропорциональна магнитному потоку, поэтому двигатель ускоряется. Одно предостережение: крутящий момент прямо пропорционален магнитному потоку, поэтому ускорение сопровождается уменьшением выходного крутящего момента.
Стабилизирующие обмотки предотвращают ускорение при увеличении нагрузки при настройке слабого поля. Единственная загвоздка в том, что реверсивные приложения требуют реверсирования этой обмотки для реверсирования напряжения якоря (ротора). Это требует реверсирования контакторов. Поэтому для реверсивного движения иногда производители просто проектируют шунтирующие двигатели с более высокой стабильностью и не используют стабилизирующие обмотки.
Примечание. Щеточный двигатель постоянного тока с постоянным магнитом работает так же, как и двигатель с шунтовой обмоткой, за исключением режима создания магнитного поля.
Реверсирование соединений двигателя с параллельной обмоткой либо на обмотках ротора, либо в поле, меняет направление вращения двигателя на противоположное; самовозбуждение поддерживает поле при изменении направления тока ротора, что означает, что двигатели могут тормозиться рекуперативно.
Двигатели с параллельной обмоткой приводят в действие станки, вентиляторы и стеклоочистители автомобилей.
Двигатели с комбинированной обмоткой
Двигатели с раздельным возбуждением (иногда называемые двигателями с составной обмоткой) — это щеточные двигатели постоянного тока с независимыми источниками напряжения на поле (статор) и якорь (ротор)… для лучшего управления мощностью двигателя.Входное напряжение на любой обмотке может управлять выходной скоростью и крутящим моментом двигателя. Большинство производителей создают двигатели с составной обмоткой с последовательной обмоткой и обмотками возбуждения (ротора) с параллельной обмоткой. Направление, сила и направление двух обмоток определяют кривые скорости вращения двигателя.
Двигатели с комбинированной обмоткой хорошо подходят для тяги в автомобилях или железнодорожных поездах.
Прочтите статью по теме: Что такое двигатели постоянного тока с постоянными магнитами и какие бывают типы?
Итак, двигатели постоянного тока создают магнитное поле через электромагнитные обмотки или постоянные магниты.
Это бесщеточный двигатель постоянного тока.
В щеточном двигателе постоянного тока магнит действует как статор. Якорь встроен в ротор, а коммутатор переключает ток. Коммутатор предназначен для передачи тока от фиксированной точки на вращающийся вал. Щеточные двигатели постоянного тока генерируют крутящий момент прямо из мощности постоянного тока, подаваемой на двигатель, с помощью внутренней коммутации, постоянных постоянных магнитов и вращающихся электромагнитов.
С другой стороны, бесщеточные двигатели постоянного тока
(BLDC) избавляются от механической коммутации в пользу электронной коммутации, которая устраняет механический износ, связанный с щеточными двигателями постоянного тока.В двигателях BLDC постоянный магнит размещен в роторе, а катушки — в статоре. Обмотки катушки создают вращающееся магнитное поле, потому что они электрически отделены друг от друга, что позволяет их включать и выключать. Коммутатор BLDC не подводит ток к ротору. Вместо этого постоянное магнитное поле ротора следует за вращающимся полем статора, создавая поле ротора.
Прочтите статью по теме: Что такое бесщеточные двигатели постоянного тока? Техническое резюме для инженеров
DigiKey Electronics — Дистрибьютор электронных компонентов
Товары
Назад
- Автоматизация и управление
- Кабели, Провода
- Защита цепи
- Разъемы
- Электромеханический
- Корпуса, Оборудование, Офис
Назад
- Ящики, корпуса, стойки
- Компьютерное оборудование
- Фурнитура, крепеж, аксессуары
Назад
- Аксессуары
- Прокладки, стойки
- Доска поддерживает
- Бамперы, ножки, колодки, ручки
- Зажимы, вешалки, крючки
- Компонентные изоляторы, крепления, распорки
- DIN-рейка канал
- Заглушки для отверстий
- Ручки
- Монтажные кронштейны
- Орехи
- Заклепки
- Винты, болты
- Шайбы
- Шайбы — втулка плеча
- Увидеть все
- Карты памяти, модули
- Сетевые решения
- Вентиляторы, управление температурным режимом
- LED / Оптоэлектроника
Назад
- Модули дисплея — ЖК-дисплей, символьный и цифровой OLED
- Модули дисплея — ЖК, OLED, графический
- Модули дисплея — светодиодные символьные и цифровые
- Волоконная оптика — модули приемопередатчиков
- Инфракрасные, УФ, видимые излучатели
- Лазерные диоды, модули
- Светодиодная индикация — дискретная
- Светодиодное освещение — початки, двигатели, модули, полосы
- Светодиодное освещение — Цвет
- Светодиодное освещение — белое
- Оптика — Световые трубки
- Панельные индикаторы, контрольные лампы
- Увидеть все
- Пассивные
- Сила
- RF / IF и RFID
- Полупроводники
Двигатели постоянного тока — Двигатели постоянного тока с сервоприводом под маркой DirectPower ™
Электродвигатели с постоянным магнитом
ElectroCraft Brush обеспечивают надежность
варианты по относительно невысокой стоимости.Где нужны надежность и мощность
в различных вариантах напряжения линейка ElectroCraft PMDC представляет собой
идеальное сочетание управления движением.
Узнать больше & rtrif;
Якорь с динамической балансировкой и бесконтактные шарикоподшипники обеспечивают надежную
плавная работа.Прочная полностью закрытая невентилируемая конструкция
(TENV) и сменные щетки помогают продлить жизненный цикл продукта. И для
дополнительная мощность и надежность выбирают наши двигатели DirectPower Plus. В
Семейство ElectroCraft PMDC используется в автомобилестроении, сельском хозяйстве, медицине,
мобильность и другие коммерческие рынки.
Стандартные функции включают шариковые подшипники, высокопроизводительные щеточные карты,
цинковые литые под давлением торцевые крышки, прочная черная окраска, все с рабочим напряжением
от 12 до 60 В постоянного тока.Дополнительные механические конфигурации, вал
конструкции и варианты обмотки доступны для настройки двигателя в соответствии с
специфические требования заказчика.
Наша команда инженеров поможет вам выбрать решение PMDC
который лучше всего подходит для вашего проекта.
Свяжитесь с нами сегодня, и мы поможем продвинуть ваши инновации.
.