Чем полезен ультразвуковой датчик расстояния для дома? Датчик ультразвуковой
Ультразвуковые датчики часть 1. Устройство и работа
Сенсорные устройства, преобразующие электрический ток в волны ультразвука, называются ультразвуковые датчики. Их принцип действия аналогичен работе радара, они улавливают цель по отраженному сигналу. Скорость звука – величина постоянная. На основании этого таким датчиком вычисляется расстояние до некоторого объекта, соответствующее диапазону времени между выходом сигнала и его возвращением.
Устройство и принцип действия
Работают ультразвуковые датчики основываясь на взаимодействии колебаний ультразвука с измеряемым пространством. Ультразвуковые колебания – это механические колебания, которые совершаются с частотой выше 20000 герц, а значит, больше верхней границы колебаний звука, воспринимаемого человеком.
Распространение таких колебаний в газообразных, жидких и твердых средах зависит от параметров самой среды. Скорость передачи колебаний для газов равна 200-1300 метров в секунду, для твердых тел 1500-8000 м/с, для жидких веществ 1100-2000 м/с. Значительно зависит скорость колебаний от давления газа.
Коэффициенты отражения волн ультразвука отличаются на границах различных сред, так же как и их способность поглощения звука. Поэтому такие датчики используют для получения информации о разных неэлектрических параметрах с помощью измерения свойств колебаний ультразвука: сдвига фаз, времени затухания, распространения колебаний.
Ультразвуковые способы измерения являются электрическими, так как возбуждение колебаний и их прием осуществляется с помощью электричества. Чаще всего в датчиках применяют пьезоэлементы, преобразователи магнитострикционного вида. Для возбуждения колебаний ультразвуковой частоты применяется эффект растяжения и сжатия пьезокристалла, называемый обратным пьезоэффектом. Поэтому пьезоэлемент применяется как в качестве приемника колебаний, так и в качестве излучателя.
Излучатели магнитострикционного вида применяют эффект деформации ферромагнитов в магнитном поле. Излучатель стержневого вида выполнен в виде тонких листов ферромагнетика, на котором намотана катушка возбуждения.
В магнитострикционных излучателях часто применяются сплавы никеля, ферриты. При нахождении ферромагнитного стержня в переменном магнитном поле, он будет разжиматься, и сжиматься с частотой поля. На рисунке показана зависимость изменения (относительного) длины стержня от напряженности поля Н. Так как направление поля не влияет на знак деформации, то частота деформации будет в 2 раза выше частоты возбуждающего поля.
Чтобы получить значительные механические деформации применяют подмагничивание стержня. Магнитострикционные излучатели действуют в условиях резонанса, если частота поля возбуждения совпадает с колебаниями стержня, определяемыми по формуле:
Где l — длина стержня, Е — модуль упругости, р — плотность.
В излучателе на основе пьезоэлемента применяется кварцевая пластина, к которой подключено переменное напряжение Uх, образующее электрическое поле по оси Х.
Обратный эффект состоит в деформации пластины по оси Х. Относительное изменение размера пластины (толщины) равно:
Δa/a=kUx/a
Поперечный эффект состоит в деформации пластины по оси У. Относительное изменение толщины пластины равно:
Δl/l=kUx/a
Размеры пластины не влияют на величину продольной деформации. Поперечная деформация повышается с увеличением отношения l/а. При разности потенциалов до 2500 вольт имеется прямая зависимость деформации и напряжения. При высоких напряжениях деформация повышается не так интенсивно. Амплитуда колебаний доходит до наибольшего значения, когда частота напряжения и частота колебаний пластины совпадают. Частота продольных колебаний вычисляется:
Модуль упругости определяется по оси Х. Модуль упругости по оси У влияет на частоту поперечных колебаний:
Если сравнить два рассмотренных типа излучателей, то можно сделать вывод, что пьезоэлектрические излучатели могут обеспечить большую частоту колебаний ультразвука.
Рассмотрим работу датчика по времени прохождения сигнала. Обработка отраженного сигнала осуществляется в той же точке, откуда и излучается. Такой метод является непосредственным обнаружением.
Рис 1Ультразвуковые датчики в момент времени Т0 излучают сигнал (некоторый набор импульсов) длительностью ∆t, распространяющийся в среде со звуковой скоростью С. При достижении объекта сигналом, часть его отражается и возвращается в приемник за время Т1. Схема электронного устройства, предназначенная для обработки сигнала, определяет расстояние, вычисляя время Т1 — Т0.
Для определения расстояния может использоваться схема с одной или двумя головками датчика. В случае с двумя головками, одна из них излучает сигнал, а вторая принимает отраженный сигнал.
Ультразвуковые датчики с одной головкой
Эта схема обладает значительным недостатком, который заключается в том, что после выдачи сигнала необходимо время для успокоения мембраны для дальнейшей работы на прием отраженного сигнала. Этот период времени называют «мертвым» временем.
Мертвое время вынуждает ультразвуковые датчики работать в «слепой зоне». Другими словами, когда объект расположен очень близко, то отраженный сигнал возвращается в измерительную головку настолько быстро, что она еще не перестроилась на работу приема, вследствие чего объект не обнаруживается.
Рис 2Продолжительность процессов перехода от излучателя до приемника зависит от различных факторов, которыми являются: особенности устройства датчика, материал изготовления, внутреннее затухание, общая колеблющаяся масса.
На рисунке 2 изображена схема функционирования датчика непосредственного обнаружения. С помощью импульса запуска схема возбуждения излучателя становится активной. Она формирует некоторый набор импульсов. Тем же импульсом запуска производится блокировка входа усилителя приемника. При отключении излучателя происходит разблокировка приемника.
Восстановление приемника происходит около 300 мкс. Это намного меньше времени успокоения излучателя. Вследствие этого параметры приемника не оказывают влияния на размер слепой зоны.
При нахождении объекта с необходимой способностью отражения в контролируемой зоне, отраженный сигнал возбуждает на мембране переменное напряжение высокой частоты, которое обрабатывается методами обнаружения сигналов аналогового типа: усиливается, ограничивается, приходит на компаратор.
Это напряжение превышает заданное значение порога обнаружения, что является сигналом того, что объект находится в контролируемой зоне. Схема электронного устройства фиксирует промежуток времени, который прошел с момента активации излучателя и создает на выходе электрический сигнал. Длина этого сигнала зависит от размера этого интервала времени, и передается на цифровой индикатор.
Схема управления после регистрации первого сигнала отражения задерживает создание следующего пускового импульса. При этом она ожидает вероятного прихода отраженного сигнала от наиболее удаленных объектов в контролируемой зоне.
Ультразвуковые датчики с двумя головками
Существенно сократить слепую зону можно путем использования двух разных головок датчика для приемника и излучателя. При этом необходимо создать наибольшую чувствительность схемы правильным выбором одинаковой частоты резонанса для приемника и излучателя.
Отслеживание порога
Размер слепой зоны является важным параметром ультразвукового датчика, который определяет его успех применяемости. Поэтому изготовители стараются снизить эту величину разными способами.
Для таких целей применяют метод отслеживания порога обнаружения. На малых расстояниях в течение процесса перехода сигнал успевает много раз пройти путь между объектом и сенсором. Точность обнаружения значительно уменьшается вследствие искажений, которые вносит сигнал с многократным отражением. Погрешность этого метода возрастает с приближением к объекту.
Это заставляет найти компромисс между точностью измерения, ложной тревоги и чувствительностью обнаружения. На рисунке 3 показан способ отслеживания порога обнаружения.
Рис 3Он заключается в том, что напряжение порога детектора, которое подается на компаратор, создается напряжением, изменяемым во времени и копирующим форму «хвоста» набора импульсов, получаемых во время затухания колебаний мембраны.
Проблема заключается в том, что детектору неизвестно какой по счету из отраженных сигналов превзошел границу порога обнаружения. По рисунку видно, что второй из отраженных сигналов оказался зарегистрированным. Это привело к определению расстояния величиной, превышающей действительную величину в два раза. Такую ситуацию нельзя допускать, поэтому датчики подлежат настройке, во избежание попадания объектов в слепую зону.
Примерные свойства ультразвуковых датчиков в зависимости от расстояния приводятся в таблице
Использование способа отслеживания границы чувствительности дало возможность снизить слепую зону в два раза. Но для применения датчиков возле слепой зоны необходима тщательная проработка. Поэтому в свойствах датчика по расстоянию кроме интервала зондирования приведен интервал настройки.
Интервал зондирования – это интервал расстояния обнаружения, который определяется только возможностями датчика в виде направленности и мощности луча, а также свойствами объекта.
Интервал настройки – это интервал расстояний, в котором можно регулировать датчик по месту для его наилучшего применения в конкретном случае. При этом необходимо учитывать расположение объекта относительно датчика и его свойства.
Ультразвуковые датчики для непосредственного обнаружения объекта выполняются со средствами, которые позволяют произвести плавную настройку дальней и ближней границы измерения.
Похожие темы:
electrosam.ru
Ультразвуковой датчик расстояния: особенности, принцип работы
Ультразвуковой датчик расстояния точно так же, как и оптический, получил широкое использование в автоматизации на различных производствах. В отличие от дальномеров оптического типа, этот вид датчиков обладает меньшим диапазоном измерительных значений, а также значительно меньшую скорость измерений.
Существует несколько преимуществ: сравнительно высокая точность прибора, низкая чувствительность в загрязнению воздуха окружающей среды, к окраске поверхности объектов, а также имеет огромный диапазон температур, при которых его можно эксплуатировать.
Ультразвуковые датчики достаточно компактны, обладают качественной конструкцией, в них отсутствуют различные подвижные детали. Кроме того, оборудование практически не требует обслуживания.
Принцип работы ультразвукового датчика положения
 Ультразвуковые датчики используются для вычисления временного промежутка, который может потребоваться звуку для движения от прибора к тому или иному объекту и назад к датчику (функционирование в диффузионном режиме), либо для проверки — был ли принят отправленный сигнал определенным отдельным приемником (для оппозиционного режима работы).
Ультразвуковые датчики используются для вычисления временного промежутка, который может потребоваться звуку для движения от прибора к тому или иному объекту и назад к датчику (функционирование в диффузионном режиме), либо для проверки — был ли принят отправленный сигнал определенным отдельным приемником (для оппозиционного режима работы).
Датчик положения применяется с целью контроля наличия или местоположение разных механизмов, а также для того, чтобы осуществлять подсчет присутствующих объектов. Такой прибор может быть использован и в роли сигнализатора предельного уровня разного рода жидкости либо сыпучих веществ.
Принцип работы ультразвукового датчика положения поддерживает два режима:
- оппозиционный;
- диффузионный.
При оппозиционном режиме функционирования передатчик с приемником представляют собой отдельные устройства, которые устанавливают один напротив другого.
При этом выход выключателя будет активизирован в том случае, если ультразвуковой пучок сталкивается с препятствием (объектом).
Выделяют несколько особенностей:
- Большой диапазон, ведь ультразвуковой пучок преодолевает сигнальное расстояние всего лишь один раз;
- Достаточно быстрое переключение;
- Не очень воспринимает интерференцию, что позволяет использовать его в довольно трудных условиях;
- Сравнительно высокая стоимость монтажных работ, потому что необходимо установить два датчика — передатчик и приемник.
Перед подключением к лампочке датчик необходимо отрегулировать его и не допускать загрязнений поверхности, поскольку это может негативно влиять на работоспособность детектора.
Диффузионным режимом работы называют функционирование датчиков в том случае, когда излучатель с приемником размещены в одном корпусе.
Благодаря этому минимизируют стоимость монтажной работы, ведь нужно закрепить и настроить всего лишь одно устройство.
Однако он характеризуется большим временем срабатывания, чем период, свойственный для датчиков, которые действуют в оппозиционном режиме.Особенности датчиков расстояния и перемещения
 Принцип работы ультразвуковых датчиков расстояния и перемещение практически ничем не отличается от выше рассмотренного прибора. Небольшая разница заключается лишь в том, что на выходе присутствует аналоговый сигнал, а не дискретный.
Принцип работы ультразвуковых датчиков расстояния и перемещение практически ничем не отличается от выше рассмотренного прибора. Небольшая разница заключается лишь в том, что на выходе присутствует аналоговый сигнал, а не дискретный.
Датчики такого типа используются с целью преобразования линейных показателей расстояния до обнаруженного объекта в электрические сигналы, которые соответствуют стандарту 4-20 мА либо 0-10 Вольт. Точность измерения является не менее 0,5 мм при расстоянии меньше одного метра, а также примерно 1 мм, если расстояние составляет более одного метра.
Датчики с аналоговым выходом и настройкой верхней границы измерений требуют указания верхнего предела измерения расстояния. Это выполняется благодаря шлиц потенциометру, который выведен на корпусе прибора.
Ультразвуковые датчики расстояния и перемещения, имеющие аналоговый выход и свойство запоминания диапазона работ, предусматривает такую особенность, как фиксирование настроек нижнего и верхнего пределов измерений.
Это объясняется наличием некоторой энергозависимой памяти и применением метода программирования оборудования. Для того, чтобы настроить диапазон функционирования, перед датчиком необходимо поместить объект возле первой границы измерения, затем следует нажать кнопку для запоминания и переместить предмет на другую границу, после чего опять нажать на эту кнопку.Как действует датчик с двумя цифровыми выходами?
 Ультразвуковой датчик с двумя цифровыми выходами, а также памятью порогов включения, имеет целый ряд особенностей. Так, для порогового регулирования необходимо, чтобы величина провиса либо уровень жидкости не должны превышать одну величину или же быть значительно меньше другой. Привод данного регулятора можно присоединять к корпусу только одного прибора. Настройка порогов срабатывания двух выходов происходит с помощью кнопки, которая находится на панели датчика.
Ультразвуковой датчик с двумя цифровыми выходами, а также памятью порогов включения, имеет целый ряд особенностей. Так, для порогового регулирования необходимо, чтобы величина провиса либо уровень жидкости не должны превышать одну величину или же быть значительно меньше другой. Привод данного регулятора можно присоединять к корпусу только одного прибора. Настройка порогов срабатывания двух выходов происходит с помощью кнопки, которая находится на панели датчика.
Возможность устанавливать два датчика близко друг к другу объясняется организацией их попеременного действия, что позволяет такая особенность, как вход синхронизации. Благодаря этому можно создавать регулятор с четырьмя порогами, проводящий независимые измерения по обеих парах порогов срабатывания.
Использование схемы ультразвукового датчика направлено на систему регулирования жидкостей, присутствующих в резервуарах, по двум уровням.
Первый датчик осуществляет измерения регулировочных уровней, а второй – на аварийных уровнях. Благодаря синхронизации действий приборы функционируют, не препятствуя друг другу.Видео с простым примером работы ультразвукового датчика расстояния
elektrik24.net
Ультразвуковые датчики | Академия робототехники
Что бы робот мог объезжать препятствия, ему нужно их видеть. Для того что бы робот стал зрячим обычно используют ультразвуковой датчик измерения расстояния. Дальность действия датчика — 180 см.Эйдзи Накано — Введение в робототехнику. Глава V. Сенсорные устройства роботов. Ультразвуковые датчики
Пьезоэлектрический эффект
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ

Технические спецификации и особенности продукта:
-
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)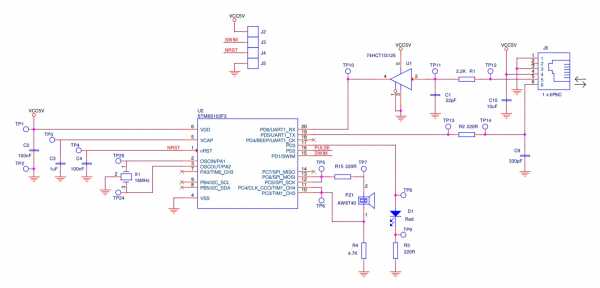
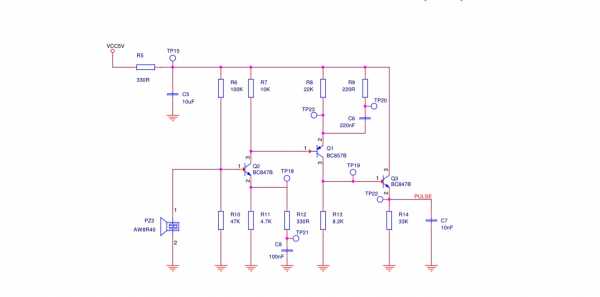
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3


Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
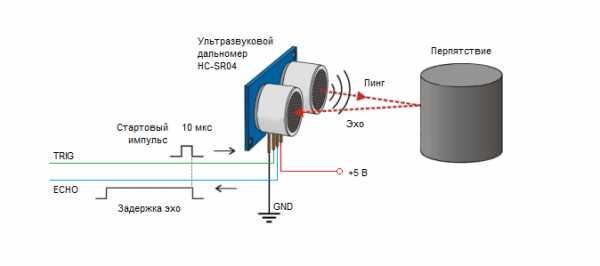
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.

Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм. ДхШхГ (Ш — без учета контактов подключения)
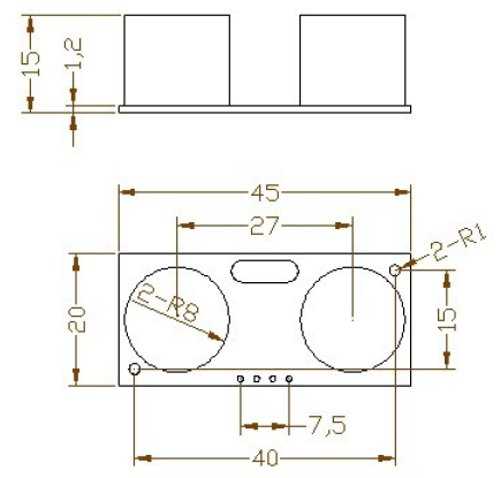
Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание:! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля.
- ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.
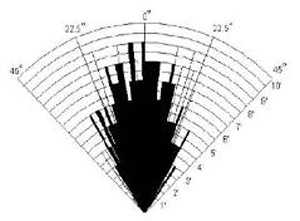
Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта www.iteadstudio.com
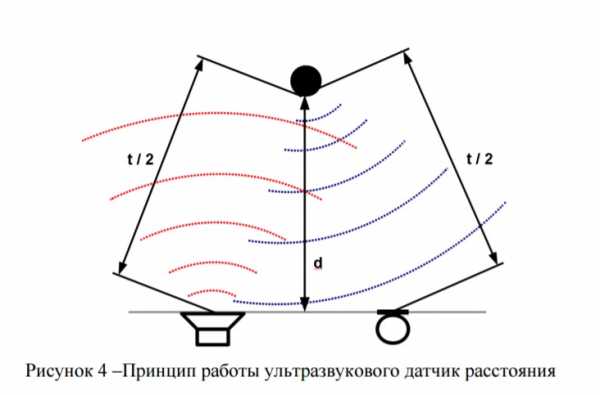
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
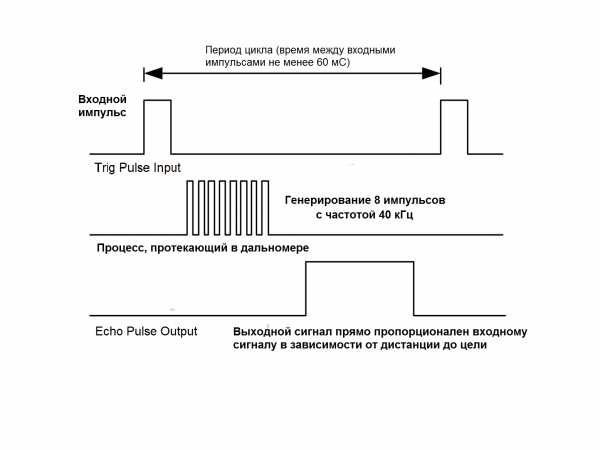
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.
- Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.
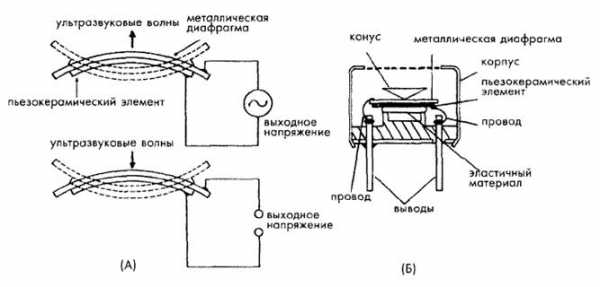
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
- Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Trig – вход
- Echo – выход
- Gnd –земля
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
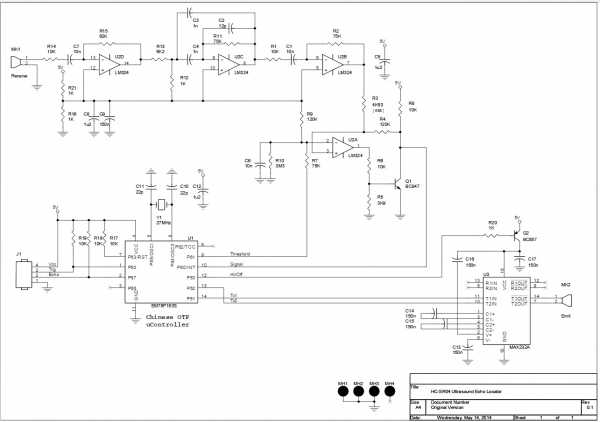
Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.
Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04Переделка ультразвукового датчика HC-SR04



Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
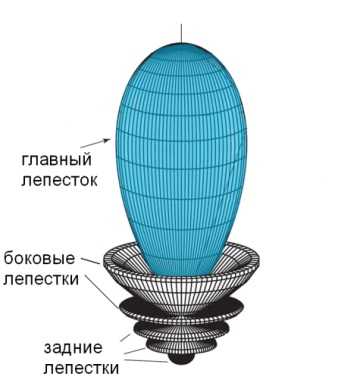
Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре)2. Номинальная частота (Кгц): 40 КГц3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%
Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata


Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
-
(Tc): piezoceramics Ультразвуковой датчик
-
(T): Категория t-общность
-
(40): Центральная частота (кгц)
-
(16): наружный диаметр? (мм)
-
(T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
-
(1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта1). Номинальная частота (кГц): 40 кГц2). излучать звук pressureat10V (= 0.02Mpa):? 117dB3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30%5). Диапазон обнаружения (м): 0.2 ~ 206).-6дБ угол направления: 80o7). Обшивка материал: алюминий8). Обшивка ЦВЕТ: серебристый
УСТРОЙСТВОПьезоэлемент
RCW-0012
Ультразвуковой датчик
Ultrasonic Ranging Module HC — SR04
РАЗРАБОТКА РОБОТА НА ОСНОВЕ УЛЬТРАЗВУКОВОГО ДАЛЬНОМЕРА
Прототип мобильного робота на Arduino mega
Проекты Altera Quartus II для платы Марсоход
Ультразвуковой дальномер HC-SR04. Подключаем к Arduino.
Урок 19. Работа с ультразвуковым датчиком расстояния HC-SR04 в BASCOM-AVR
Radar проекта
Ультразвуковой дальномер HC-SR04 подключение к Arduino
HC-SR04 Дальномер ультразвуковой
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.alibaba.com/product-detail/HC-SR04-Ultrasonic-Module-Distance-Measuring_1898465949.html
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://arduino-kit.ru/userfiles/image/HC-SR04%20_.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
The Application of PWM Capture (Data Acquisition) and Ultrasonic Sensors
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www.arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
Сонар для инвалидов по зрению
https://hackaday.io/project/5903/logs
https://hackaday.io/project/5903-sonar-for-the-visually-impaired/log/18329-ultrasonic-module-virtual-teardown
https://www.maxbotix.com/performance.htm
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
https://ezoneda.company.weiku.com/item/SRF05-five-Pin-Ultrasonic-ranging-module-Ultrasonic-sensor-15404413.html
Использование ультразвукового дальномера
Пьезоэлектродвигатели
Пьезоэлектрический преобразователь как альтернативный источник энергииПьезоэлектрические преобразователи в ультразвуковой диагностике
Импульсные ультразвуковые сонары открытого типа
Пьезо-сенсор стука на Arduino UNO
Справочник ультразвуковых излучателей и приемниковAudiowell Electronics (Guangdong) Co, Ltd.
Pro-Wave Electronics Corporation (Тайвань)
Ultrasonic Sonar Ranging IC — PW0268
Miniature Tuning Fork Quartz Crystals
Air Ultrasonic Ceramic Transducers 320SR093
Sonar Ranging Module SRM400
400EP250 Pulse Transit Enclose Type Ultrasonic TransduceСеть магазинов «Кварц»
https://www.stroykat.by/tipyi-datchikov-rashoda-zhidkostey.html
mirrobo.ru
Принцип работы УЗИ аппарата. Ультразвуковой датчик
Под ультразвуком понимают звуковые волны, частота которых находится вне диапазона частот, воспринимаемых человеческим ухом.
Открытие ультразвука восходит к наблюдениям за полетом летучих мышей. Ученые, завязывая глаза летучим мышам, установили, что эти животные не утрачивают ориентировку в полете и могут обходить препятствия. Но после того как им закрывали также уши, ориентировка в пространстве у летучих мышей нарушалась и они сталкивались с препятствиями. Это позволило сделать вывод, что летучие мыши в темноте ориентируются с помощью звуковых волн, не улавливаемых человеческим ухом. Эти наблюдения были сделаны уже в XVII веке, тогда же был предложен термин «ультразвук». Летучая мышь для ориентировки в пространстве излучает короткие импульсы УЗ-волн. Эти импульсы, отражаясь от препятствий, воспринимаются спустя некоторое время ухом летучей мыши (феномен эха). По времени, которое проходит от момента излучения УЗ-импульса до восприятия отраженного сигнала, животное определяет расстояние до предмета. Кроме того, летучая мышь может также определить направление, по которому возвращается эхо-сигнал, локализацию предмета в пространстве. Таким образом, она посылает УЗ-волны и воспринимает затем отраженную картину окружающего ее пространства.
Принцип УЗ-локации лежит в основе работы многих технических устройств. По так называемому принципу импульсного эхо-сигнала работает гидролокатор, определяющий положение судна относительно косяков рыбы или морского дна (эхолот), а также аппараты УЗ-диагностики (УЗД), применяемые в медицине: аппарат излучает УЗ-волны, затем воспринимает отраженные сигналы, и по времени, прошедшему от момента излучения до момента восприятия эхо-сигнала, определяют пространственное положение отражающей структуры.
Что такое звуковые волны?
Звуковые волны - это механические колебания, распространяющиеся в пространстве подобно волнам, возникающим после того, как в воду бросили камень. Распространение звуковых волн в значительной степени зависит от вещества, в котором они распространяются. Объясняется это тем, что звуковые волны возникают лишь при колебании частиц вещества.
Поскольку распространение звука возможно только от материальных предметов, в вакууме звук не образуется (на экзаменах часто задают вопрос «на засыпку»: как распространяется звук в вакууме?).
Звук в среде может распространяться как в продольном, так и в поперечном направлении. УЗ-волны в жидкостях и газах продольные, так как отдельные частицы среды колеблются вдоль направления распространения звуковой волны. Если плоскость, в которой колеблются частицы среды, располагается под прямым углом к направлению распространения волны, как, например, в случае морских волн (колебания частиц в вертикальном направлении, а распространение волны – в горизонтальном), говорят о поперечных волнах. Такие волны наблюдаются и в твердых телах (например, в костях). В мягких тканях ультразвук распространяется преимущественно в виде продольных волн.
Когда отдельные частицы продольной волны смещаются по направлению друг к другу, их плотность, а, следовательно, и давление в веществе среды в этом месте возрастает. Если частицы расходятся друг от друга, локальная плотность вещества и давление в этом месте снижаются. УЗ-волна образует зоны пониженного и повышенного давления. При прохождении УЗ-волны через ткань это давление очень быстро меняется в точке среды. Чтобы отличить давление, образуемое УЗ-волной, от постоянного давления среды, его называют также переменным, или звуковым, давлением.
Параметры звуковой волны
К параметрам звуковой волны относятся:
-
Амплитуда (А), например максимальное звуковое давление («высота волны»).
-
Частота (v), т.е. количество колебаний за 1 с. Единицей измерения частоты является герц (Гц). В диагностических аппаратах, применяемых в медицине, используют диапазон частот от 1 до 50 МГ ц(1 МГц = 106Гц, обычно диапазон 2,5-15 МГц).
-
Длина волны (λ), т.е. расстояние до соседнего гребня волны (точнее, минимальное расстояние между точками с одинаковой фазой).
-
Скорость распространения, или скорость звука (с). Она зависит от среды, в которой распространяется звуковая волна, а также от частоты.
Существенное влияние оказывают давление и температура, но в физиологическом диапазоне температур этим влиянием можно пренебречь. Для каждодневной работы полезно помнить, что чем плотнее среда, тем больше скорость распространения звука в ней.
Скорость распространения звука в мягких тканях равна примерно 1500 м/с и повышается с увеличением плотности тканей.

Эта формула занимает центральное место в медицинской эхографии. С ее помощью можно вычислить длину волны λ ультразвука, позволяющую определить минимальный размер анатомических структур, которые еще видимы при УЗИ. Те анатомические структуры, размер которых меньше длины УЗ-волны, при УЗИ уже неразличимы.
Длина волны позволяет получить довольно грубое изображение и не годится для оценки небольших структур. Чем выше частота ультразвука, тем меньше длина волны и размер анатомических структур, которые еще можно различить.
Возможность детализации возрастает с увеличением частоты ультразвука. При этом уменьшается глубина проникновения ультразвука в ткани, т.е. снижается его проникающая способность. Таким образом, с увеличением частоты ультразвука уменьшается доступная глубина исследования тканей.
Длина волны ультразвука, применяемого при эхографии для исследования тканей, колеблется от 0,1 до 1 мм. Более мелкие анатомические структуры идентифицировать не удается.

Как получают ультразвук?
Пьезоэлектрический эффект
Получение ультразвука, применяемого в медицинской диагностике, основывается на пьезоэлектрическом эффекте – способности кристаллов и керамики деформироваться под действием приложенного электрического напряжения. Под действием переменного напряжения кристаллы и керамика периодически деформируются, т.е. возникают механические колебания и образуются УЗ-волны. Пьезоэлектрический эффект обратим: УЗ-волны вызывают деформацию пьезоэлектрического кристалла, которая сопровождается возникновением электрического напряжения, поддающегося измерению. Таким образом, пьезоэлектрические материалы служат как генераторами УЗ-волн, так и их приемниками.
При возникновении УЗ-волны она распространяется в соединяющей среде. «Соединяющая» означает, что между генератором ультразвука и средой, в которой он распространяется, существует очень хорошая звуковая проводимость. Для этого обычно применяют стандартный УЗ-гель.
Для облегчения перехода УЗ-волн с твердой керамики пьезоэлемента на мягкие ткани его покрывают специальным УЗ-гелем.
При чистке УЗ-датчика следует соблюдать осторожность! Согласующий слой в большинстве УЗ-датчиков портится при повторной обработке спиртом из «гигиенических» соображений. Поэтому при чистке УЗ-датчика необходимо строго следовать инструкции, прилагаемой к аппарату.

Строение ультразвукового датчика
Генератор УЗ-колебаний состоит из пьезоэлектрического материала, большей частью керамического, на передней и задней стороне которого находятся электрические контакты. На переднюю сторону, обращенную к больному, нанесен согласующий слой, который предназначен для оптимального проведения ультразвука в ткани. На задней стороне пьезоэлектрические кристаллы покрыты слоем, который сильно поглощает ультразвук, что препятствует отражению УЗ-волн в разные стороны и ограничивает подвижность кристалла. Это позволяет добиться того, чтобы УЗ-датчик излучал как можно более короткие УЗ-импульсы. Длительность импульса - определяющий фактор осевой разрешающей способности.
Датчик для УЗИ в В-режиме, как правило, состоит из многочисленных мелких, примыкающих друг к другу керамических кристаллов, которые настраивают по отдельности или группами.
УЗ-датчик очень чувствителен. Это объясняется, с одной стороны, тем, что он в большинстве случаев содержит керамические кристаллы, которые очень хрупки, с другой – тем, что составные элементы датчика расположены с большой точностью друг возле друга и при механическом встряхивании или ударах могут сместиться или сломаться. Стоимость современного УЗ-датчика зависит от типа оборудования и примерно равна стоимости автомобиля среднего класса.

Перед транспортировкой УЗ-аппарата надежно закрепите УЗ-датчик на аппарате, а лучше отсоедините его. Датчик при падении легко ломается, и даже незначительные его сотрясения могут вызвать серьезное повреждение.
В диапазоне применяемых в медицинской диагностике частот невозможно получить резко сфокусированный луч, подобный лазерному, которым можно «зондировать» ткани. Однако для получения оптимального пространственного разрешения необходимо стремиться максимально уменьшить диаметр УЗ-луча (в качестве синонима УЗ-луча иногда употребляют термин «УЗ-луч» — этим подчеркивается, что в случае УЗ-поля речь идет о пространственной структуре, которая в идеале имеет минимальный диаметр).
Чем меньше УЗ-луч, тем лучше видны при УЗИ детали анатомических структур.
Поэтому ультразвук по возможности фокусируют на определенную глубину (несколько глубже исследуемой структуры), с тем, чтобы УЗ-луч образовал «талию». Фокусируют ультразвук либо с помощью «акустических линз», либо, подавая на отдельные пьезокерамические элементы преобразователя импульсные сигналы с различными взаимными сдвигами во времени. При этом фокусирование на большую глубину требует увеличения активной поверхности, или апертуры, УЗ-преобразователя.
При сфокусированном датчике в УЗ-поле выделяют три зоны:
-
ближнюю;
-
фокусную;
-
дальнюю.

Наиболее четким УЗ-изображение получается тогда, когда исследуемый объект находится в фокусной зоне УЗ-луча. Объект располагается в фокусной зоне, когда УЗ-луч имеет наименьшую ширину, а значит, его разрешающая способность максимальна.
Ближняя ультразвуковая зона
Ближняя зона примыкает непосредственно к УЗ-датчику. Здесь УЗ-волны, излучаемые поверхностью различных пьезокерамических элементов, накладываются друг на друга (другими словами, происходит интерференция УЗ-волн), поэтому образуется резко неоднородное поле. Поясним это на наглядном примере: если бросить в воду пригоршню камешков, то круговые волны, расходящиеся от каждого из них, накладываются друг на друга. Вблизи места падения камешка, соответствующего ближней зоне, волны нерегулярные, но на некотором отдалении постепенно приближаются к круговым. Попробуйте хоть раз проделать такой эксперимент вместе с детьми, когда прогуливаетесь возле воды! Выраженная неоднородность ближней УЗ-зоны образует нечеткое изображение. Сама однородная среда в ближней зоне выглядит как чередующиеся светлые и темные полосы. Поэтому ближняя УЗ-зона для оценки изображения почти или вовсе не годится. Этот эффект наиболее выражен у конвексных и секторных датчиков, которые излучают расходящийся УЗ-луч; у линейного датчика неоднородность ближней зоны выражена в наименьшей степени.
Можно определить, как далеко распространяется ближняя УЗ-зона, если, поворачивая регулятор, будете усиливать сигнал, одновременно наблюдая за УЗ-полем, примыкающим к датчику. Ближнюю УЗ-зону можно распознать по белой пелене вблизи датчика. Попробуйте сравнить ближнюю зону линейного и секторного датчиков.
Поскольку ближняя УЗ-зона неприменима для оценки изображения объекта, при проведении УЗИ стремятся минимизировать ближнюю зону и при помощи различных способов вывести ее из исследуемой области. Это можно сделать, например, подобрав оптимальное положение датчика или путем электронного выравнивания неравномерности УЗ-поля. Но на практике добиться этого проще всего с помощью так называемого буфера, заполненного водой, который помещают между датчиком и объектом исследования. Это позволяет вывести шум ближней зоны из области расположения исследуемого объекта. Обычно в качестве буфера применяют специальные насадки для отдельных датчиков или универсальную гелевую прокладку. Вместо воды в настоящее время используют пластиковые насадки на основе силикона.
При поверхностном расположении исследуемых структур применение буфера может существенно улучшить качество УЗ-изображения.

Фокусная зона
Фокусная зона характеризуется тем, что, с одной стороны, диаметр (ширина) УЗ-луча здесь наименьший, а с другой стороны, из-за эффекта собирательной линзы интенсивность ультразвука наибольшая. Это позволяет получать высокое разрешение, т.е. возможность отчетливо различать детали исследуемого объекта. Поэтому анатомическое образование или объект, который предстоит исследовать, необходимо располагать в фокусной зоне.
Дальняя ультразвуковая зона
В дальней УЗ-зоне луч ультразвука расходится. Поскольку при прохождении через ткани УЗ-луч ослабляется, интенсивность ультразвука, особенно высокочастотная его составляющая, снижается. Оба этих процесса отрицательно влияют на разрешающую способность, а следовательно, и на качество УЗ-изображения. Поэтому при исследовании в дальней УЗ-зоне четкость объекта утрачивается – тем больше, чем он дальше отстоит от датчика.
Разрешающая способность аппарата
Разрешающая способность системы визуального исследования, как оптическая, так и акустическая, определяется минимальным расстоянием, при котором два объекта на изображении воспринимаются как отдельные. Разрешающая способность - важный качественный показатель, характеризующий эффективность визуализационного метода исследования.
На практике часто упускают из виду, что повышение разрешающей способности имеет смысл лишь тогда, когда исследуемый объект по своим акустическим свойствам существенно отличается от окружающих тканей, т.е. имеет достаточную контрастность. Увеличение разрешающей способности при отсутствии достаточной контрастности не улучшает диагностические возможности исследования. Аксиальная разрешающая способность (в направлении распространения УЗ-луча) лежит в области удвоенного значения длины волны. Строго говоря, решающее значение имеет длительность отдельных излучаемых импульсов. Она бывает несколько больше двух последовательных колебаний. Это означает, что при датчике с рабочей частотой 3,5 МГц тканевые структуры размером 0,5 мм теоретически должны восприниматься как отдельные структуры. На практике это наблюдается лишь при условии, что структуры достаточно контрастны.
Боковая (латеральная) разрешающая способность зависит от ширины УЗ-луча, а также от фокусировки и, соответственно, от глубины исследования. В связи с этим разрешающая способность значительно варьирует. Наибольшее разрешение отмечается в фокусной зоне и равно примерно 4-5 длинам волны. Таким образом, латеральное разрешение в 2-3 раза слабее аксиального. В качестве типичного примера можно привести УЗИ протока поджелудочной железы. Просвет протока удается отчетливо визуализировать лишь тогда, когда он располагается перпендикулярно направлению УЗ-луча. Расположенные слева и справа под другим углом части протока уже не видны, потому что аксиальное разрешение сильнее латерального.
Сагиттальная разрешающая способность зависит от ширины УЗ-луча в плоскости, перпендикулярной плоскости сканирования, и характеризует разрешение в направлении, перпендикулярном направлению распространения, и, следовательно, толщину пласта изображения. Сагиттальная разрешающая способность, как правило, хуже, чем аксиальная и латеральная. В инструкции, прилагаемой к УЗ-аппарату, этот параметр упоминается редко. Однако следует исходить из того, что сагиттальная разрешающая способность не может быть лучше латеральной и что эти два параметра сопоставимы лишь в сагиттальной плоскости в фокусной зоне. У большинства УЗ-датчиков сагиттальный фокус устанавливают на определенную глубину и выражен он не совсем четко. На практике сагиттальное фокусирование УЗ-луча осуществляют путем использования в датчике согласующего слоя в качестве акустической линзы. Вариабельное фокусирование перпендикулярно плоскости изображения, таким образом, уменьшение толщины этого слоя достижимо лишь с помощью матрицы пьезоэлементов.
В тех случаях, когда перед врачом, проводящим исследование, поставлена задача детального описания анатомической структуры, необходимо исследовать ее в двух по возможности взаимно перпендикулярных плоскостях, если это позволяют сделать анатомические особенности изучаемой области. При этом разрешающая способность уменьшается от аксиального направления к латеральному и от латерального к сагиттальному.

Типы ультразвуковых датчиков
В зависимости от расположения пьезоэлектрических элементов различают три типа УЗ-датчиков:
-
линейные;
-
секторные;
-
конвексные.
В линейных датчиках пьезоэлектрические элементы расположены вдоль прямой раздельно или группами и излучают УЗ-волны в ткани параллельно. После каждого прохождения через ткани появляется прямоугольное изображение (за 1 с - порядка 20 изображений или более). Преимущество линейных датчиков состоит в возможности получения высокого разрешения вблизи расположения датчика (т.е. относительно высокое качество изображения в ближней зоне), недостаток – в небольшом поле УЗ-обзора на большой глубине (объясняется это тем, что, в отличие от конвексного и секторного датчиков, УЗ-лучи линейного датчика не расходятся).
Датчик с фазированной решеткой напоминает линейный датчик, но имеет меньшие размеры. Он состоит из ряда кристаллов с раздельной настройкой. Датчики этого типа создают на мониторе изображение секторного датчика. В то время как в случае механического секторного датчика направление УЗ-импульса определяется поворотом пьезоэлемента, при работе с датчиком с фазированной решеткой направленный сфокусированный УЗ-луч получают путем смещения по времени (фазовый сдвиг) всех активируемых кристаллов. Это значит, что отдельные пьезоэлектрические элементы активируются с задержкой по времени и в результате УЗ-пучок излучается в косом направлении. Это позволяет фокусировать УЗ-луч в соответствии с поставленной задачей исследования (электронное фокусирование) и одновременно существенно улучшить разрешение в нужной части УЗ-изображения. Еще одно преимущество состоит в возможности динамического фокусирования принимаемого сигнала. При этом фокус во время приема сигнала устанавливают на оптимальную глубину, что также заметно улучшает качество изображения.
В механическом секторном датчике в результате механического колебания элементов преобразователя УЗ-волны излучаются в различных направлениях, поэтому формируется изображение в виде сектора. После каждого прохождения через ткань формируется изображение (10 и более за 1 с). Преимущество секторного датчика состоит в том, что он позволяет получить широкое поле обзора на большой глубине, а недостаток - в невозможности исследования в ближней зоне, так как поле зрения вблизи датчика слишком узкое.
В конвексном датчике пьезоэлектрические элементы расположены друг возле друга по дуге (изогнутый датчик). Изображение по качеству представляет собой нечто среднее между изображением, получаемым линейным и секторным датчиками. Конвексный датчик, как и линейный, характеризуется высоким разрешением в ближней зоне (хотя оно и не достигает разрешения линейного датчика) и при этом широким полем обзора в глубине тканей — подобно секторному датчику.

Лишь при двухмерном расположении элементов УЗ-преобразователя в форме матрицы удается фокусировать УЗ-луч одновременно в латеральном и сагиттальном направлении. Эта так называемая матрица пьезоэлементов (или двухмерная матрица) дополнительно позволяет получить данные о трех измерениях, без чего сканирование объема тканей, находящегося перед датчиком, невозможно. Изготовление матрицы пьезоэлементов – трудоемкий процесс, требующий применения новейших технологий, поэтому лишь в последнее время фирмы-производители стали оснащать выпускаемые ими УЗ-аппараты конвексными датчиками.
doctoroff.ru
Ультразвуковые датчики
Ультразвуковые датчики представляют собой сенсорные устройства, которые преобразуют электрическую энергию в волны ультразвука. Принцип работы схож с радаром, так как они обнаруживают цель на основе интерпретации сигнала, который от них отражен. Скорость звука является величиной постоянной, поэтому с помощью такого датчика можно легко установить расстояние до объекта, соответствующее интервалу времени между отправкой самого сигнала и возвращением эха от него.
 Ультразвуковые датчики обладают целым рядом особенностей, которые позволяют определить область их использования. Можно выделить небольшую дальность действия, направленность сигнала, низкую скорость волнового распространения. Основным преимуществом ультразвуковых датчиков является их достаточно невысокая стоимость. В автомобилях они могут использоваться для организации парковочных систем. Ультразвуковые датчики уровня с увеличенной дальностью действия активно используются в ряде конструкций систем помощи для контроля слепых зон. Находят они применение и в разнообразных системах управления автомобилем в автоматическом режиме.
Ультразвуковые датчики обладают целым рядом особенностей, которые позволяют определить область их использования. Можно выделить небольшую дальность действия, направленность сигнала, низкую скорость волнового распространения. Основным преимуществом ультразвуковых датчиков является их достаточно невысокая стоимость. В автомобилях они могут использоваться для организации парковочных систем. Ультразвуковые датчики уровня с увеличенной дальностью действия активно используются в ряде конструкций систем помощи для контроля слепых зон. Находят они применение и в разнообразных системах управления автомобилем в автоматическом режиме.
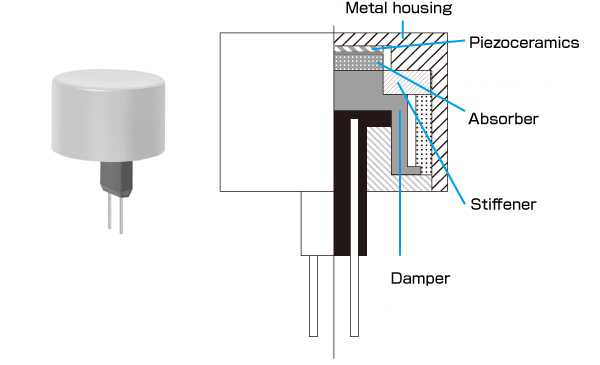
 В качестве основы датчика можно назвать преобразователь, который объединяет активный элемент и диафрагму. В данном случае преобразователь функционирует в качестве передатчика и приемника. Активным элементом генерируется короткий импульс, который потом принимается в виде эха от препятствия. Его производят из специального пьезоэлектрического материала. В данном случае алюминиевая диафрагма выступает в качестве контактной поверхности датчика, позволяя определить акустические характеристики. Основание преобразователя достаточно упругое, чтобы поглощать вибрации. Все элементы находятся в пластмассовом корпусе, оснащенном разъемами для подключения.
В качестве основы датчика можно назвать преобразователь, который объединяет активный элемент и диафрагму. В данном случае преобразователь функционирует в качестве передатчика и приемника. Активным элементом генерируется короткий импульс, который потом принимается в виде эха от препятствия. Его производят из специального пьезоэлектрического материала. В данном случае алюминиевая диафрагма выступает в качестве контактной поверхности датчика, позволяя определить акустические характеристики. Основание преобразователя достаточно упругое, чтобы поглощать вибрации. Все элементы находятся в пластмассовом корпусе, оснащенном разъемами для подключения.
Ультразвуковые датчики работают так: при получении сигнала извне активный элемент приводит к вибрации диафрагмы, посылающей ультразвуковые импульсы в пространство. Когда эти волны встречаются с препятствием, они отражаются, возвращаясь к преобразователю, и создают вибрации активного элемента, с которого потом и снимается электрический сигнал.
 Ультразвуковые датчики обладают такими основными характеристиками, как частота импульса, дальность обнаружения препятствия, быстродействие. У современных парковочных устройств частота составляет 40 кГц, а дальность обнаружения - до 2,5 метров.
Ультразвуковые датчики обладают такими основными характеристиками, как частота импульса, дальность обнаружения препятствия, быстродействие. У современных парковочных устройств частота составляет 40 кГц, а дальность обнаружения - до 2,5 метров.
Производителями обычно не указывается значение столь важного параметра, как угол обзора. В датчиках угол обзора обычно определяется посредством частоты сигналов, а также формы и размеров преобразователя. Чем выше показатель частоты импульса, тем меньшим будет угол обзора.
Ультразвуковые датчики расстояния обладают массой неоспоримых преимуществ, однако они имеют и весьма значительные функциональные ограничения. Работоспособность и точность устройств снижается при плохих погодных условиях, а также при сильном загрязнении. Сенсор способен пропускать мелкие предметы, а также поверхности, обладающие низкой отражающей способностью.
fb.ru
Ультразвуковые датчики часть 2. Типы и работа. Применение
Ультразвуковые датчики обладают своими особенностями, определяющими их сферу применения. Они имеют малую дальность функционирования, направление сигнала, малую скорость распространения волн. Главным достоинством датчиков является низкая цена.
Типы ультразвуковых датчиков
Рассмотрим основные типы датчиков, работа которых основана на скорости ультразвука в различных средах.
Аналоговые ультразвуковые датчики
Работа такого датчика заключается в том, что время прохождения ультразвука в датчике создается в форме аналогового сигнала. Изготовители производят комбинированные датчики с двумя выходами: аналоговым и переключательным. В таких датчиках можно задавать границы измерения внутри интервала обнаружения.
Различные исполнения датчиков имеют аналоговый выход с возможностью сигнала выхода от 4 до 20 миллиампер, либо выход напряжения до 10 вольт. Существуют также датчики с автоматическим переключением вида выхода в зависимости от типа нагрузки.
Границы измерения в разных датчиках имеют возможность регулировки:
- Заданием свойств по интерфейсу.
- С помощью кодирующих переключателей.
- Двумя потенциометрами.
Цифровые ультразвуковые датчики
Существуют датчики, которые обрабатывают сигнал в цифровой вид. В них предусмотрен цифровой дисплей с прилагаемым устройством обработки данных. Чаще всего применяется интерфейс RS – 232. Это позволяет создать информативный диалог между устройством управления и датчиком, что в свою очередь увеличивает гибкость использования датчика и дает возможность более полно применять его функциональные возможности.
Цифровой интерфейс позволяет вводить параметры, необходимые для обработки сигнала. Такими параметрами являются пределы интервала обнаружения, вид переключения выхода, режим зондирования, параметры и свойства среды. Одним датчиком можно обнаружить объект, и вычислить на каком расстоянии он находится. В датчиках имеются два вспомогательных переключателя выхода.
Интеллектуальные датчики
Кроме регулируемых датчиков с возможностью настройки, существуют самообучающиеся датчики. Они могут сохранить в памяти диаграмму сигнала отражения при включении или активации конфигурации. В конце этого процесса поступающие сигналы подлежат сравнению с сохраненными ранее сигналами. Датчик взаимодействует только с отличающимися от сохраненных сигналами. В результате в интервале обнаружения посторонние объекты никак не влияют.
Инновационные ультразвуковые датчики из-за широкого применения возможностей и научных достижений в области электроники характерны своими малыми размерами. Поэтому они требуют совсем незначительное количество места для монтажа. В малом объеме корпуса заключено много сложнейших функций: компенсация температуры, синхронизация, предварительная конфигурация и т.д.
Датчики способны обнаруживать объекты бесконтактным методом в интервале 30-500 мм.
Интеллектуальные ультразвуковые датчики используются в устройствах для определения уровня наполнения емкости, сохраняют в памяти сигнал отражения при пустой емкости. При этом сохраняются все отраженные сигналы от специальной оснастки, которая вмонтирована в емкость, например, спирали нагревания, мешалки, аварийные трапы. Если уровень наполнения емкости изменяется, то отраженные сигналы сравниваются с первоначальным значением.
«Обнаруженными» являются объекты, которые не присутствовали на предварительной конфигурации. Помехи в виде случайных сигналов в результате проверки на достоверность исключаются.
Сфера использования
Работа эхолота
Действие ультразвукового датчика можно рассмотреть на работе прибора, определяющего глубину моря, то есть, эхолота. На пьезоэлемент 2 подается переменное напряжение, возникают колебания ультразвука, которые имеют направление вертикально вниз.
Импульс ультразвука отражается и поступает на пьезоэлемент 2. Электронный прибор 3 определяет время t между отправленным и принимаемым импульсами. Можно рассчитать глубину моря по формуле, из которой видно, что глубина h прямо зависит от скорости звука v и времени t: h = v * t / 2.
Шкала прибора отградуирована в метрах. Подобным образом работает ультразвуковой локатор, который определяет дальность до препятствия по ходу корабля в прямом направлении. Существуют животные, у которых есть органы чувств, работающие на ультразвуковом принципе, например, дельфины, летучие мыши.
Уровнемеры и дефектоскопы
В ультразвуковых дефектоскопах и уровнемерах применяется свойство отражения ультразвука от границы сред. Отношение между энергиями излучающих и отраженных колебаний является коэффициентом отражения. Он имеет значительную величину в средах с разными скоростями звука и плотностью. На границе сталь-вода коэффициент отражения равен 88, а на границе трансформаторное масло-вода – 0,6. Однако даже при незначительных коэффициентах отражения величина отраженного сигнала достаточна для определения положения границы сред.
Единицей измерения удаленности до границы сред является время распространения колебаний до нее и обратно до приемника. С помощью способности ультразвука проходить через любые среды можно производить измерения бесконтактным методом, не касаясь среды.
Ультразвуковые уровнемеры работаю чаще всего по принципу передачи импульсов в среду. Пьезоэлемент работает поочередно излучателем и приемником.
Импульсы высокой частоты подаются от генератора 2 по проводнику к датчику, излучающему колебания ультразвука в контролируемую среду. Они отражаются от раздела сред и приходят обратно к пьезоэлектрическому элементу, преобразующему колебания в сигнал электрического тока.
Сигнал проходит через усилитель 3 и поступает на устройство измерения 4, которое определяет время между отправлением импульса генератором 2 и возвращением его в усилитель. В итоге многоразового отражения импульса могут возвратиться несколько сигналов, которые уменьшаются в амплитуде и опаздывающие на равное время.
Частота импульсов не должна быть очень большой, так как отраженные сигналы должны успеть возвратиться до отправления следующего импульса. Такие уровнемеры работают с точностью 1% при уровне измерения около 10 метров при повышенной температуре, давлении, в агрессивной среде. В воздушном пространстве колебания ультразвука затухают намного быстрее, чем в жидкостях и твердых телах. Поэтому в устройстве расходомера излучатель целесообразно установить под емкостью с жидкостью, а не над ней.
Ультразвуковые расходомеры
Принцип действия ультразвукового расходомера заключается в эффекте суммирования скорости ультразвука в среде со скоростью перемещения среды. Пьезоэлементы 1 и 2 находятся возле трубопровода и приводятся в действие от генератора 3. Каждый пьезоэлемент поочередно действует приемником и излучателем с помощью переключателя 4.
В результате колебания ультразвука проходят в одну сторону попутно потоку среды, а другую сторону навстречу потоку. По потоку скорости колебаний складываются со скоростью потока, а в обратном направлении вычитаются.
Сигналы, прошедшие по среде, усиливаются с помощью усилителя 5 и проходят на устройство измерения 6. Разность фаз колебаний прямо зависит от скорости среды. Шкала прибора градуируется для каждой отдельной среды. Если прибор применяется для другой среды, то градуировка должна меняться.
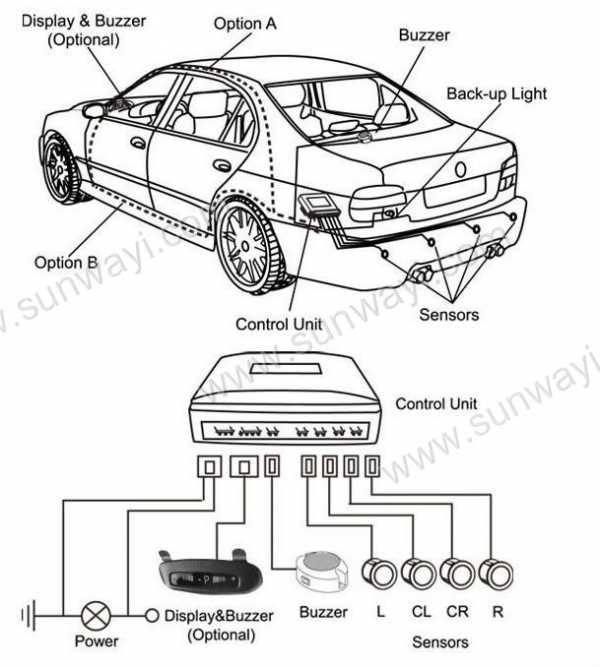
Датчики парковки
Чаще всего датчики применяются в автомобилях в системах парковки. Датчики с повышенной дальностью работы широко применяются в системах управления транспортом в автоматическом режиме. Принцип их действия аналогичен принципу рассмотренных выше датчиков. Парктроники могут устанавливаться на различные модели автомобилей.
Действие парктроника основано на ультразвуковом принципе излучения. Это позволяет определить приближение автомобиля к другим предметам, ограждению и т. д. В этой системе ультразвуковые датчики являются генераторами ультразвука, и в то же время приемниками отраженных импульсов. В центральном контроллере сигнал обрабатывается и вычисляет расстояние до объекта. Парковочные датчики работают в ограниченной зоне, поэтому они применяются группами.
Датчики парковки отличаются моделями по типу монтажа. Существуют накладные и врезные модели. Врезные датчики устанавливаются в бампер. Предварительно в нем сверлятся специальные отверстия для монтажа.
Накладные датчики крепятся на клеевую основу. Их преимущество в том, что нет необходимости механического воздействия на бампер. Также существуют проводные модели датчиков и беспроводные устройства. Беспроводные датчики легче монтировать, однако многие автолюбители отказываются от них из-за повышенного влияния различных помех на работу датчиков.
Похожие темы:
electrosam.ru
Составляющие системы ультразвуковой диагностики Генератор ультразвуковых волн
Физическая основа УЗИ — пьезоэлектрический эффект. При деформации монокристаллов некоторых химических соединений (кварц, титанат бария) под воздействием ультразвуковых волн, на поверхности этих кристаллов возникают противоположные по знаку электрические заряды — прямой пьезоэлектрический эффект. При подаче на них переменного электрического заряда, в кристаллах возникают механические колебания с излучением ультразвуковых волн. Таким образом, один и тот же пьезоэлемент может быть попеременно то приёмником, то источником ультразвуковых волн. Эта часть в ультразвуковых аппаратах называется акустическим преобразователем, трансдюсером или датчиком.
Ультразвук распространяется в средах в виде чередующихся зон сжатия и расширения вещества. Звуковые волны, в том числе и ультразвуковые, характеризуются периодом колебания— временем, за которое молекула (частица) совершает одно полное колебание; частотой— числом колебаний в единицу времени; длиной— расстоянием между точками одной фазы и скоростью распространения, которая зависит главным образом от упругости и плотности среды. Длина волны обратно пропорциональна её частоте. Чем меньше длина волн, тем выше разрешающая способность ультразвукового аппарата. В системах медицинской ультразвуковой диагностики обычно используют частоты от 2 до 10 МГц. Разрешающая способность современных ультразвуковых аппаратов достигает 1-3 мм.
Любая среда, в том числе и ткани организма, препятствует распространению ультразвука, то есть обладает различным акустическим сопротивлением, величина которого зависит от их плотности и скорости распространения звуковых волн. Чем выше эти параметры, тем больше акустическое сопротивление. Такая общая характеристика любой эластической среды обозначается термином «акустический импеданс».
Достигнув границы двух сред с различным акустическим сопротивлением, пучок ультразвуковых волн претерпевает существенные изменения: одна его часть продолжает распространяться в новой среде, в той или иной степени поглощаясь ею, другая — отражается. Коэффициент отражения зависит от разности величин акустического сопротивления граничащих друг с другом тканей: чем это различие больше, тем больше отражение и, естественно, больше амплитуда зарегистрированного сигнала, а значит, тем светлее и ярче он будет выглядеть на экране аппарата. Полным отражателем является граница между тканями и воздухом.[1]
В простейшем варианте реализации метод позволяет оценить расстояние до границы разделения плотностей двух тел, основываясь на времени прохождения волны, отраженной от границы раздела. Более сложные методы исследования (например, основанные на эффекте Допплера) позволяют определить скорость движения границы раздела плотностей, а также разницу в плотностях, образующих границу.
Ультразвуковые колебания при распространении подчиняются законам геометрической оптики. В однородной среде они распространяются прямолинейно и с постоянной скоростью. На границе различных сред с неодинаковой акустической плотностью часть лучей отражается, а часть преломляется, продолжая прямолинейное распространение. Чем выше градиент перепада акустической плотности граничных сред, тем большая часть ультразвуковых колебаний отражается. Так как на границе перехода ультразвука из воздуха на кожу происходит отражение 99,99 % колебаний, то при ультразвуковом сканировании пациента необходимо смазывание поверхности кожи водным желе, которое выполняет роль переходной среды. Отражение зависит от угла падения луча (наибольшее при перпендикулярном направлении) и частоты ультразвуковых колебаний (при более высокой частоте большая часть отражается).
Для исследования органов брюшной полости и забрюшинного пространства, а также полости малого таза используется частота 2,5 — 3,5 МГц, для исследования щитовидной железы используется частота 7,5 МГц.
Особый интерес в диагностике вызывает использование эффекта Допплера. Суть эффекта заключается в изменении частоты звука вследствие относительного движения источника и приемника звука. Когда звук отражается от движущегося объекта, частота отраженного сигнала изменяется (происходит сдвиг частоты).
При наложении первичных и отраженных сигналов возникают биения, которые прослушиваются с помощью наушников или громкоговорителя.
Генератором ультразвуковых волн является датчик, который одновременно играет роль приемника отраженных эхосигналов. Генератор работает в импульсном режиме, посылая около 1000 импульсов в секунду. В промежутках между генерированием ультразвуковых волн пьезодатчик фиксирует отраженные сигналы.
Ультразвуковой датчик
В качестве детектора или трансдюсора применяется сложный датчик, состоящий из нескольких сотен мелких пьезокристаллических преобразователей, работающих в одинаковом режиме. В датчик вмонтирована фокусирующая линза, что дает возможность создать фокус на определенной глубине.
Виды датчиков
Все ультразвуковые датчики делятся на механические и электронные. В механических сканирование осуществляется за счет движения излучателя (он или вращается или качается). В электронных развертка производится электронным путем. Недостатками механических датчиков являются шум, вибрация, производимые при движении излучателя, а также низкое разрешение. Механические датчики морально устарели и в современных сканерах не используются. Используются три типа ультразвукового сканирования: линейное (параллельное), конвексное и секторное. Соответственно датчики или трансдюсоры ультразвуковых аппаратов называются линейные, конвексные и секторные. Выбор датчика для каждого исследования проводится с учетом глубины и характера положения органа.
Линейные датчики
Линейные датчики используют частоту 5-15 Мгц. Преимуществом линейного датчика является полное соответствие исследуемого органа положению самого трансдюсора на поверхности тела. Недостатком линейных датчиков является сложность обеспечения во всех случаях равномерного прилегания поверхности трансдюсора к коже пациента, что приводит к искажениям получаемого изображения по краям. Также линейные датчики за счет большей частоты позволяют получать изображение исследуемой зоны с высокой разрешающей способностью, однако глубина сканирования достаточно мала (не более 11 см). Используются в основном для исследования поверхностно расположенных структур — щитовидной железы, молочных желез, небольших суставов и мышц, а также для исследования сосудов.
Конвексные датчики
Конвексный датчик использует частоту 1,8-7,5 МГц. Имеет меньшую длину, поэтому добиться равномерности его прилегания к коже пациента более просто. Однако при использовании конвексных датчиков получаемое изображение по ширине на несколько сантиметров больше размеров самого датчика. Для уточнения анатомических ориентиров врач обязан учитывать это несоответствие. За счет меньшей частоты глубина сканирования достигает 20-25 см. Обычно используется для исследования глубоко расположенных органов — органы брюшной полости и забрюшинного пространства, мочеполовой системы, тазобедренные суставы.
Секторные датчики
Секторный датчик работает на частоте 1,5-5 Мгц. Имеет ещё большее несоответствие между размерами трансдюсора и получаемым изображением, поэтому используется преимущественно в тех случаях, когда необходимо с маленького участка тела получить большой обзор на глубине. Наиболее целесообразно использование секторного сканирования при исследовании, например, через межреберные промежутки. Типичным применением секторного датчика является эхокардиография — исследование сердца.
studfiles.net









Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






