Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя. Двигатель bldc
Бесколлекторные двигатели постоянного тока. Что это такое?
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор – магниты, статор – обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы “ну это как синхронник”, или еще хуже “он похож на шаговик”. Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор “кормит” двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ – это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел – коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники – просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
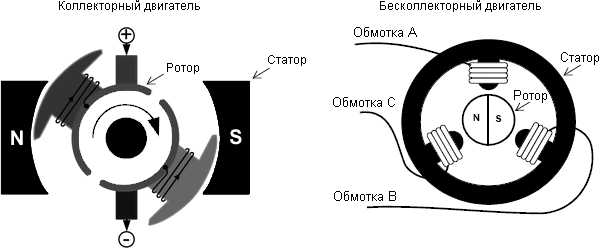
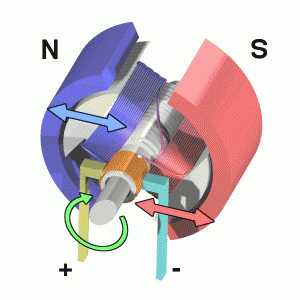
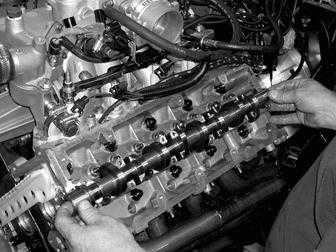
Для того чтобы понять, что происходит в электронике регулятора, управляющего бесколлекторным двигателем, вернемся немного назад и сначала разберемся как работает коллекторный двигатель. Из школьного курса физики помним, как магнитное поле действует на рамку с током. Рамка с током вращается в магнитном поле. При этом она не вращается постоянно, а поворачивается до определенного положения. Для того чтобы происходило непрерывное вращение, нужно переключать направление тока в рамке в зависимости от положения рамки. В нашем случае рамка с током – это обмотка двигателя, а переключением занимается коллектор – устройство со щетками и контактами. Устройство простейшего двигателя смотри на рисунке.
То же самое делает и электроника, управляющая бесколлекторным двигателем – в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя. Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких – без датчиков? В чем их отличие?
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) – применяют двигатели с датчиками.Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
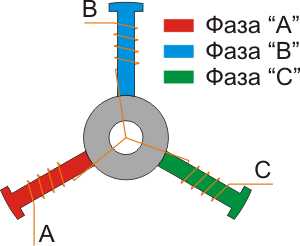
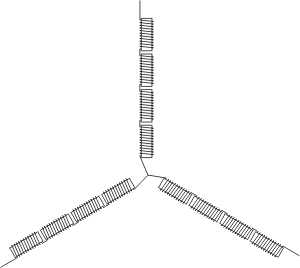
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы – это обмотки двигателя. Поэтому если сказать “трехобмоточный”, думаю, это тоже будет правильно. Три обмотки соединяются по схеме “звезда” или “треугольник”. Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
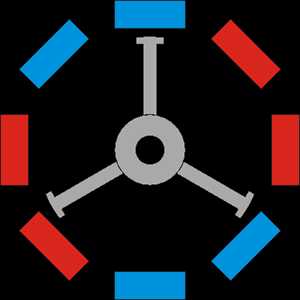
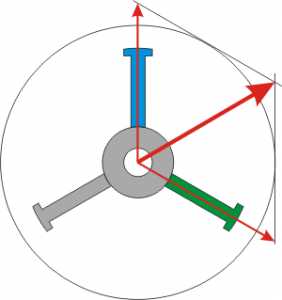
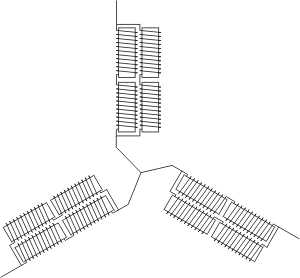
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
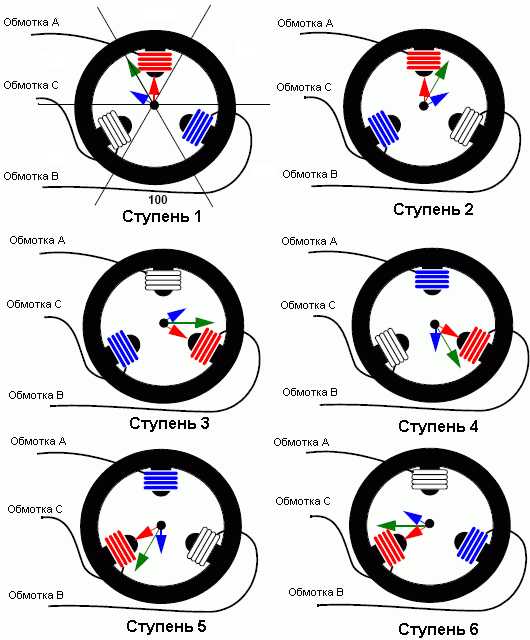
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться “шагами” на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы “на пальцах”Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Статьи по бесколлекторным двигателям:
www.avislab.com
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.
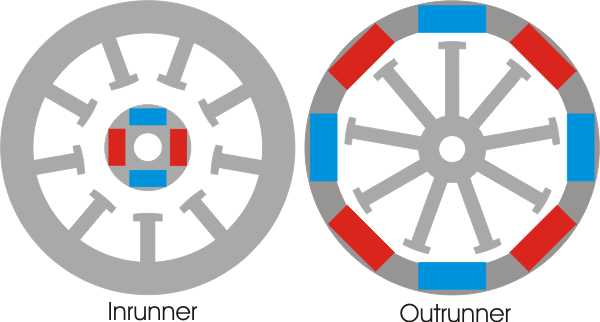
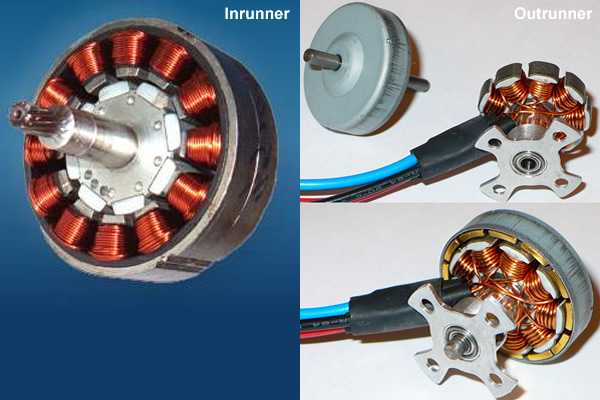
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
Количество полюсов на роторе четное. Форма применяемых магнитов обычно прямоугольная. Цилиндрические магниты применяются реже. Устанавливаются они с чередованием полюсов.
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Обмотка трехфазного бесколлекторного двигателя выполняется медным проводом. Провод может быть одножильным или состоять из нескольких изолированных жил. Статор выполняется из нескольких сложенных вместе листов магнитопроводящей стали.

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
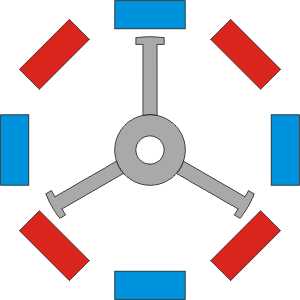
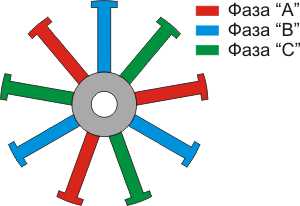
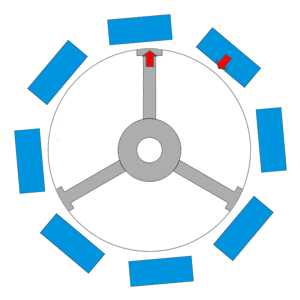
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
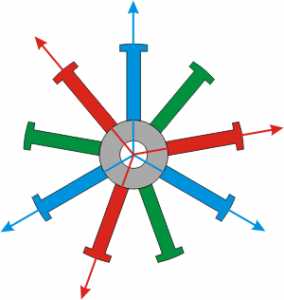
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов
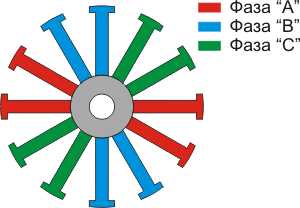
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
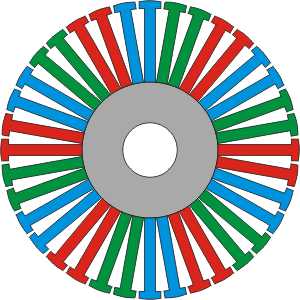
6 групп по 2 зуба
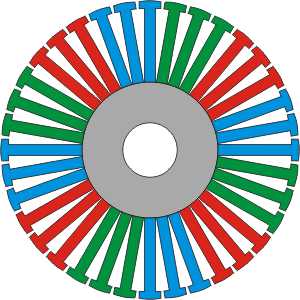
4 группы по 3 зуба
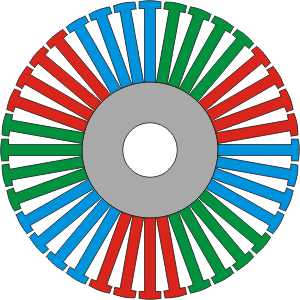
3 группы по 4 зуба
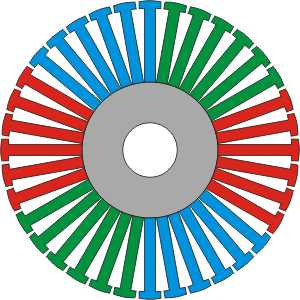
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 – это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
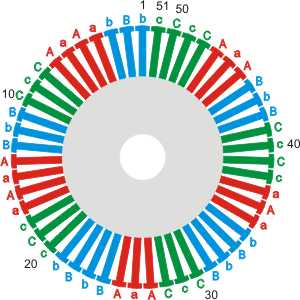
Рассмотрим реальную схему обмотки.
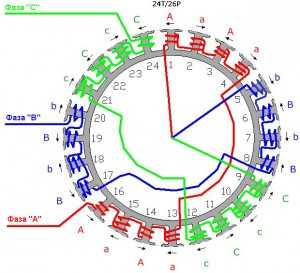
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
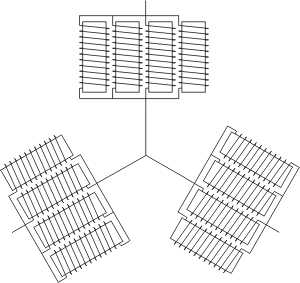
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный оборот. При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре. Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот. Например, имеем 42 магнита на роторе. Для того чтобы провернуть ротор на один оборот, потребуется 42/2=21 электрический оборот. Это свойство можно использовать как своеобразный редуктор. Подобрав необходимое количество полюсов, можно получить двигатель с желаемыми скоростными характеристиками. Кроме того, понимание этого процесса будет нам необходимо в будущем, при выборе параметров регулятора.
Датчики положения
Устройство двигателей без датчиков отличается от двигателей с датчиками только отсутствием последних. Других принципиальных отличий нет. Наиболее распространены датчики положения, работающие на основе эффекта Холла. Датчики реагируют на магнитное поле, их располагают, как правило, на статоре таким образом, чтобы на них воздействовали магниты ротора. Угол между датчиками должен быть 120 градусов.
Имеется в виду “электрических” градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:
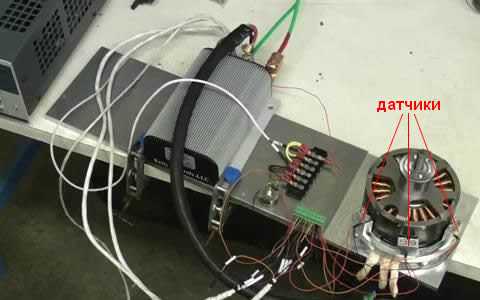
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Каждый двигатель рассчитывается под определенные требования и имеет следующие основные характеристики:
- Режим работы на который рассчитан двигатель: длительный или кратковременный. Длительный режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный – подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены.
- Сопротивление обмотки двигателя. Сопротивление обмотки двигателя влияет на КПД двигателя. Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
- Максимальное рабочее напряжение. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром.
- Максимальные обороты. Иногда указывают не максимальные обороты, а Kv – количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу.
- Максимальный ток. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше.
- Максимальная мощность двигателя. Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно – несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя.
- Номинальная мощность. Мощность, которую двигатель может развивать на протяжении всего времени включения.
- Угол опережения фазы (timing). Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
Так же следует обратить внимание на то, что при номинальной нагрузке Вы не получите максимальных оборотов на валу двигателя. Kv указывается для не загруженного двигателя. При питании двигателя от батарей следует учесть “проседание” питающего напряжения под нагрузкой, что в свою очередь также снизит максимальные обороты двигателя.
Звезда и Треугольник
Обмотки бесколлекторного двигателя соединяют по схеме звезда или треугольник (дельта).
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Литература
Design and Prototyping Methods for Brushless Motors and Motor Controlby Shane W. Colton
Вентильные электрические двигатели и приводы на их основеОвчинников И.Е.
Статьи по бесколлекторным двигателям:
www.avislab.com
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
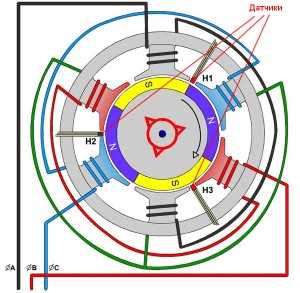
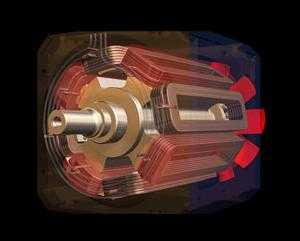
Одна из причин проявления интереса к БД – это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
 Рис. 2. Устройство бесколлекторного двигателя
Рис. 2. Устройство бесколлекторного двигателяКак видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
 Рис. 3. Конструкция с внешним якорем (outrunner)
Рис. 3. Конструкция с внешним якорем (outrunner)Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
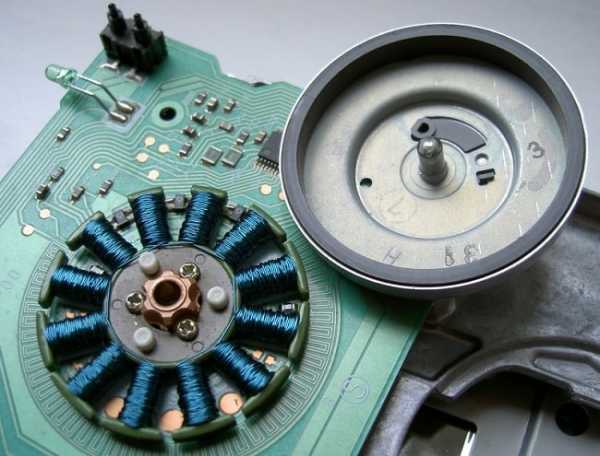 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководеПринцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
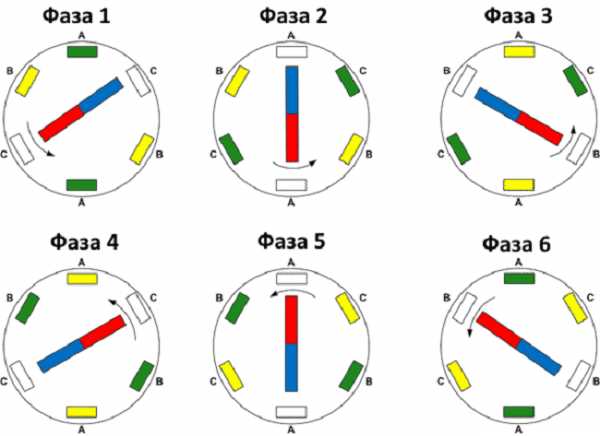 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
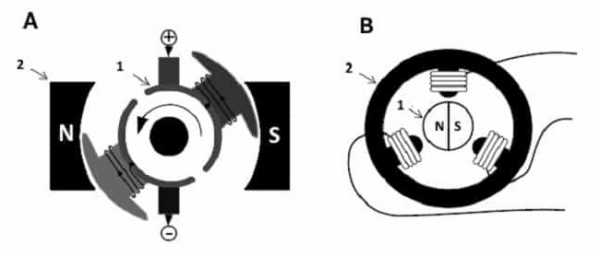 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
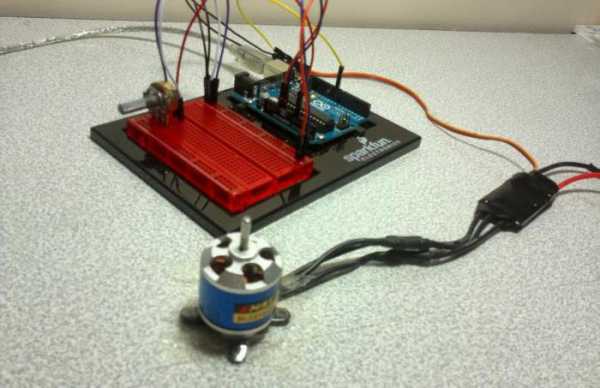
Как запустить бесколлекторный двигатель?
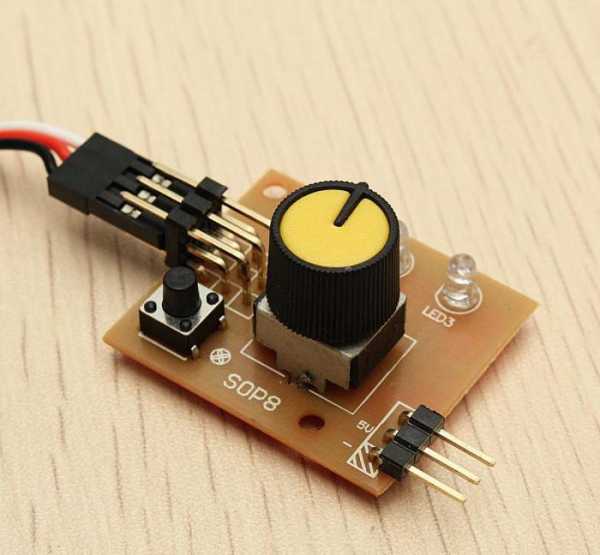
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
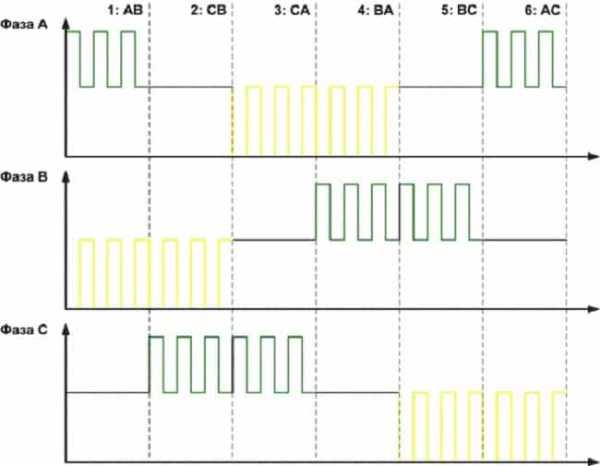 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» – отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» – положительный, «А» – отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
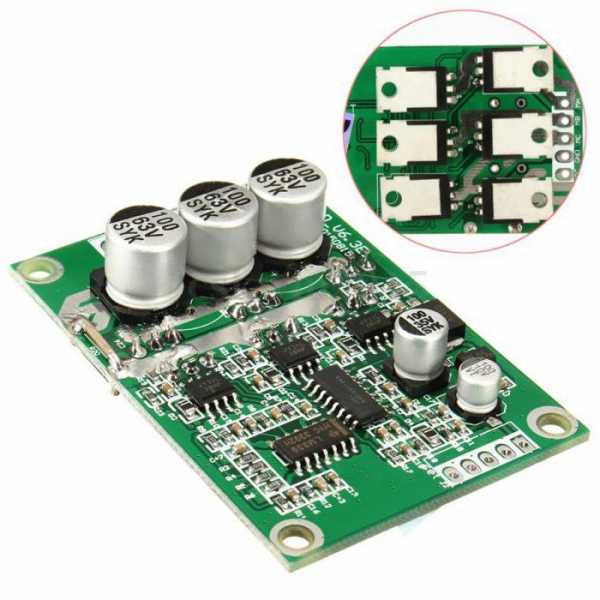
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
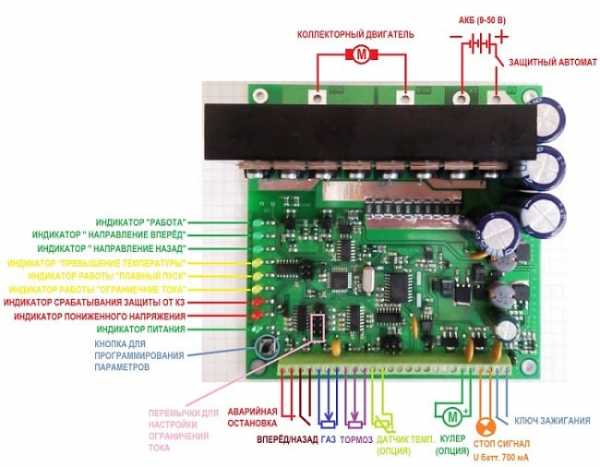 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
www.asutpp.ru
Вентильный двигатель: принцип работы и схема
Для того чтобы решать задачи по контролю современных прецизионных систем, все чаще используется вентильный двигатель. Это характеризуется большим преимуществом таких приборов, а также активным формированием вычислительных возможностей микроэлектроники. Как известно, они могут обеспечить высокую плотность длительного момента и энергоэффективности по сравнению с другими видами двигателей.
Схема вентильного двигателя
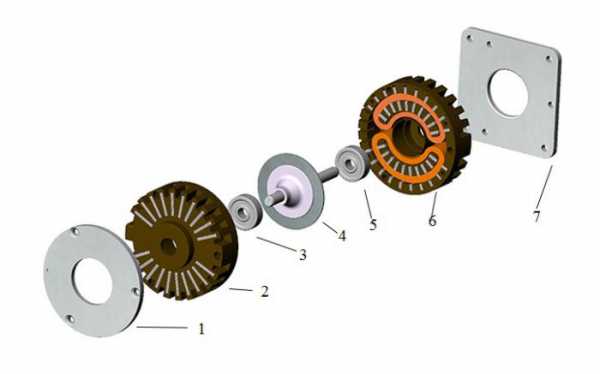
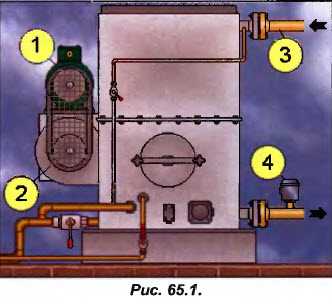
Двигатель состоит из следующих деталей:
1. Задняя часть корпуса.2. Статор.3. Подшипник.4. Магнитный диск (ротор).5. Подшипник.6. Статор с обмоткой.7. Передняя часть корпуса.
У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название.
Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, трельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов.
В случае соединения обмоток «звездой» устройство имеет большие постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов.
Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.
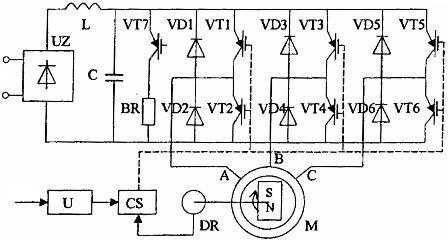
Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов.Условные обозначения:- VT1-VT7 - транзисторные коммуникаторы;- A, B, C – фазы обмоток;- M – момент двигателя;- DR – датчик положения ротора;- U – регулятор напряжения питания двигателя;- S (south), N (north) – направление магнита;- UZ – частотный преобразователь;- BR – датчик частоты вращения;- VD – стабилитрон;- L – катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции.
Принципы работы
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Преимущества
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
- возможность применения широкого диапазона для модифицирования частоты вращения;
- высокая динамика и быстродействие;
- максимальная точность позиционирования;
- небольшие затраты на техническое обслуживание;
- устройство можно отнести к взрывозащищенным объектам;
- имеет способность переносить большие перегрузки в момент вращения;
- высокий КПД, который составляет более 90%;
- имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
- при длительной работе нет перегрева электродвигателя.
Недостатки
Несмотря на огромное количество достоинств, вентильный двигатель также имеет и недостатки в эксплуатации:- довольно сложное управление электродвигателем;- относительно высокая цена устройства из-за применения в его конструкции ротора, который имеет дорогостоящие постоянные магниты.
Вентильный индукторный двигатель

Вентильно-индукторный двигатель – это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора.
Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
Свойства двигателя
Такие устройства обладают высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в них отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.
Вентильные двигатели постоянного тока
Все двигатели постоянного тока можно назвать бесколлекторными. Они работают от сети с постоянным током. Щеточный узел предусмотрен для электрического объединения цепей ротора и статора. Такая деталь является самой уязвимой и достаточно сложной в обслуживании и ремонте.
Вентильный двигатель постоянного тока работает по тому же принципу, что и все синхронные устройства такого типа. Он представляет собой замкнутую систему, включающую силовой полупроводниковый преобразователь, датчик положения ротора и координатор.
Вентильные двигатели переменного тока
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Принцип работы синхронного двигателя

Вентильный синхронный двигатель работает на основе взаимодействия магнитных полей ротора и статора. Схематически магнитное поле при вращении можно изобразить плюсами этих же магнитов, которые движутся со скоростью магнитного поля статора. Поле ротора также возможно изобразить как постоянный магнит, который делает обороты синхронно с полем статора. В случае отсутствия внешнего вращающего момента, который прикладывается к валу аппарата, оси полностью совпадают. Воздействующие силы притяжения проходят вдоль всей оси полюсов и могут компенсировать друг друга. Угол между ними приравнивается к нулю.
В случае если на вал машины будет воздействовать тормозной момент, то ротор перемещается в сторону с запаздыванием. Благодаря этому силы притяжения разбиваются на составляющие, которые направляются вдоль оси плюсовых показателей и перпендикулярно к оси полюсов. Если будет прикладываться внешний момент, который создает ускорение, то есть начинает действовать по направлению вращения вала, картинка по взаимодействию полей полностью изменится на обратную. Направленность углового смещения начинает трансформироваться на противоположное, и в связи с этим меняется направление тангенциальных сил и воздействие электромагнитного момента. При таком раскладе двигатель становится тормозным, а аппарат работает как генератор, который подводимую к валу механическую энергию преобразует в электрическую. Далее она перенаправляется в сеть, питающую статор.
Когда будет отсутствовать внешний, явнополюсный момент начнет принимать положение, при котором ось полюсов магнитного поля статора будет совпадать с продольной. Это размещение станет соответствовать минимальному сопротивлению потока в статоре.
В случае воздействия на вал машины тормозного момента ротор отклонится, при этом магнитное поле статора будет деформированным, так как поток стремится замкнуться по наименьшему сопротивлению. Для его определения необходимы силовые линии, направленность которых в каждой из точек будет соответствовать движению действия силы, поэтому изменение поля приведет к появлению тангенциального взаимодействия.
Рассмотрев все эти процессы в синхронных двигателях, можно выявить демонстративный принцип обратимости разнообразных машин, то есть возможность любого электрического аппарата изменить направленность преобразованной энергии на противоположную.
Бесколлекторные двигатели с постоянными магнитами
Вентильный двигатель с постоянными магнитами используется для решения серьезных оборонных и промышленных задач, так как такое устройство имеет большой запас мощности и эффективности.
Эти приборы чаще всего применяются в отраслях, где необходимы сравнительно низкие потребляющие мощности и небольшие габариты. Они могут иметь самые разные габариты, без технологических ограничений. В то же время большие аппараты не являются совершенно новыми, их чаще всего производят компании, которые стремятся преодолеть экономические трудности, ограничивающие ассортимент этих приборов. У них есть свои преимущества, среди которых можно отметить высокую эффективность из-за потерь в роторе и большую плотность мощности. Для управления бесколлекторными двигателями нужен частотно-регулируемый привод.
Анализ по затратам и результатам показывает, что устройства с постоянными магнитами намного предпочтительнее, по сравнению с другими, альтернативными технологиями. Чаще всего они используются для отраслей промышленности с достаточно тяжелым распорядком работы судовых двигателей, в военной и оборонной отрасли и других подразделениях, число которых непрерывно возрастает.
Реактивный двигатель
Вентильно-реактивный двигатель работает с использованием двухфазных обмоток, которые установлены вокруг диаметрально противоположных полюсов статора. Подача питания продвигается к ротору в соответствии с полюсами. Таким образом, его противодействие полностью сводится к минимуму.
Вентильный двигатель, своими руками созданный, обеспечивает высокоэффективную скорость привода при оптимизированном магнетизме для работы с реверсом. Информация о месторасположении ротора используется для того, чтобы управлять фазами подачи напряжения, так как это является оптимальным для достижения непрерывного и плавного крутящего момента и высокой эффективности.
Сигналы, которые выдает реактивный двигатель, накладываются на угловую ненасыщенную фазу индуктивности. Минимальное сопротивление полюса полностью соответствует максимальной индуктивности устройства.
Положительный момент можно получить только при углах, когда показатели позитивные. На небольших скоростях фазный ток обязательно должен быть ограниченным, чтобы произвести защиту электроники от высоких вольт-секунд.Механизм преобразования можно иллюстрировать линией реактивной энергии. Мощностная сфера характеризует собой питание, которое преобразовывается в механическую энергию. В случае его резкого отключения избыточная или остаточная сила возвращается к статору. Минимальные показатели влияния магнитного поля на производительность устройства являются основным его отличием от похожих устройств.
fb.ru
Силовая часть регулятора BLDC двигателей (RU)
Проектирование силовой части обычно начинают с выбора ключей. Наиболее подходящие для этого полевые MOSFET транзисторы. Выбор силовых транзисторов делается на основании данных о максимальном возможный ток и напряжение питающей сети двигателя.
Выбор силовых транзисторов
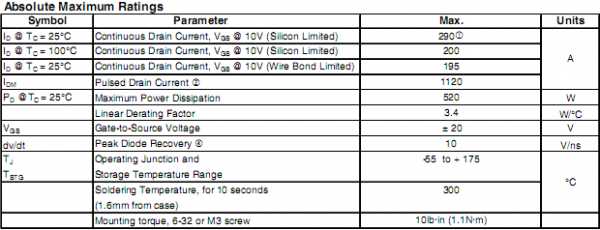
Транзисторы должны выдерживать рабочей ток с некоторым запасом. Поэтому выбирают полевые транзисторы с рабочим током в 1.2-2 раза больше максимального тока двигателя. В характеристиках полевых транзисторов может быть указано несколько значений тока для различных режимов. Иногда указывают ток, который может выдерживать кристалл Id (Silicon Limited) (он больше) и ток, ограниченный возможностями корпуса транзистора Id (Package Limited) (он меньше). например:
Кроме того, фигурирует ток для импульсного режима (Pulsed Drain Current), который, значительно больше (в несколько раз), чем максимально возможный постоянный ток.
Надо выбирать транзисторы по постоянному току, и не обращать внимание на параметры, указанные для импульсного режима. При выборе транзистора учитывается только значение постоянного тока. В данном случае – 195А.
Если невозможно подобрать транзистор нужным рабочим током, несколько транзисторов включают параллельно.
При этом обязательно следует применять указанные на схеме резисторы. Их номинал – единицы Ом, но благодаря им соединены параллельно транзисторы открываются одновременно. Если эти резисторы не ставить, может возникнуть ситуация, когда один из транзисторов открывается, а остальные – еще нет. За это короткое время вся мощность сваливается на один транзистор и выводит его из строя. Об определении номинала этих резисторов говорится ниже. Два транзистора, включенных параллельно, выдерживают вдвое больший ток. 3 – в 3 раза больше. Но не следует злоупотреблять этим и строить ключи из большого количества мелких транзисторов.
Выбор полевых транзисторов по напряжению также выполняется с запасом как минимум в 1.3 раза. Это делается для того, чтобы избежать выхода из строя транзисторов из за скачков напряжения во время коммутаций.
Кроме указанных выше параметров, следует поинтересоваться максимальной температурой работы транзистора и будет ли он выдерживать необходимый ток при этой температуре. Одна из важнейших характеристик – это сопротивление открытого транзистора. Его значения могут достигать нескольких миллиом. На первый взгляд – очень мало, но при больших токах на нем будут выделяться значительные объемы тепла, которое придется отводить. Мощность, которая будет греть транзистор в открытом состоянии, рассчитывается по формуле:
P=Rds*Id^2
Где:Rds– сопротивление открытого транзистора;Ids – ток, который протекает через транзистор.
Отже, якщо транзистор irfp4468pbf має опір 2.6 мOм, то під час пропускання струму 195 А на ньому буде виділятися 98.865 Ватт тепла. У випадку мостової трьохфазної схеми у кожний момент часу відкриті тільки два ключі. Тобто, на двох відкритих транзисторах буде виділятися однакова кількість тепла (по 98.865 Вт, загалом – 197.73 Вт). Але вони працюють не весь час, а по черзі – парами, тобто кожна пара ключів працює 1/3 часу. Отже правильно сказати, що загалом на всіх ключах буде виділятися 197.73 Вт тепла, а на кожному з ключів (98.865 / 3 = 32.955 Вт). Слід забезпечити відповідне охолоджування транзисторів.
Итак, если транзистор irfp4468pbf имеет сопротивление 2.6 мOм, то при токе 195 А на нем будет выделяться 98.865 Ватт тепла. В случае мостовой трехфазной схемы в каждый момент времени открыты только два ключа. То есть, на двух открытых транзисторах будет выделяться одинаковое количество тепла (по 98.865 Вт, в общем – 197.73 Вт). Но они работают не все время, а по очереди – парами, то есть каждая пара ключей работает 1/3 времени. Так что правильно сказать, что в целом на всех ключах будет выделяться 197.73 Вт тепла, а на каждом из ключей (98.865 / 3 = 32.955 Вт). Следует обеспечить соответствующее охлаждение транзисторов.
Но есть одно “но”
Мы примерно подсчитали те тепловые потери, которые происходят за период, когда ключи полностью открыты. Однако не надо забывать, что для ключей присущи такие явления, как переходные процессы. Именно в момент переключения, когда сопротивление ключа изменяется от практически нулевого до почти бесконечности и наоборот, происходит наибольшее тепловыделение, которое значительно больше тех потерь, которые происходят при открытых ключах.
Уявімо, що ми маємо загрузку 0.55 Ом. Напруга живлячої мережі 100В. При повністю відкритих ключах отримаємо струм 100/0.55 = 181 А. Транзистор закривається і в деякий момент його опір сягає 1 Ом. У цей час через нього тече струм 100/(1+0,55)=64.5А Пам’ятаєте формулу, за якою обчислюється теплова потужність? Виходить, що в цей, дуже короткий, час теплові втрати на транзисторі (1+0.55)*(64.5^2) = 6448 Вт. Що значно більше ніж при відкритому ключі. Коли опір транзистора зросте до 100 Ом втрати будуть 99.45 Вт. Коли опір транзистора зросте до 1 КОм втрати будуть 9.98 Вт. Коли опір транзистора зросте до 10 КОм втрати будуть 0.99 Вт.
Представим, что мы имеем нагрузку 0.55 Ом. Напряжение питающей сети 100В. При полностью открытых ключах получим ток 100 / 0.55 = 181 А. Транзистор закрывается и в некоторый момент его сопротивление достигает 1 Ом. В это время через него течет ток 100 / (1 + 0,55) = 64.5А. Помните формулу, по которой вычисляется тепловая мощность? Получается, что в этот очень короткий момент тепловые потери на транзисторе (1 + 0.55) * (64.5 ^ 2) = 6448 Вт. Что значительно больше чем при открытом ключе. Когда сопротивление транзистора возрастет до 100 Ом потери будут 99.45 Вт. Когда сопротивление транзистора возрастет до 1 кОм потери будут 9.98 Вт. Когда сопротивление транзистора возрастет до 10 кОм потери будут 0.99 Вт.
Если вы создадите очень мощную систему охлаждения, а в транзисторе будет образовываться больше тепла чем он физически сможет отвести от себя (смотри: Maximum Power Dissipation), он сгорит.
Итак, не трудно понять, чем быстрее будут переключаться ключи, тем меньше тепловые потери, и тем меньше будет температура ключей.
На скорость переключения ключей влияет: емкость затвора полевого транзистора, номинал резистора в цепи затвора, мощность драйвера ключей. От правильного выбора этих элементов зависит насколько эффективно будут работать ключи.
Иногда люди считают, что можно увеличить мощность регулятора лишь изменив ключи на более мощные. Это не совсем так. Более мощные транзисторы имеют большую емкость затвора, а это увеличивает время открывания транзистора, что влияет на их температурный режим. Такое редко случается, но у меня был случай, когда простая замена транзисторов на более мощные увеличила их температуру из за того, что время их переключения выросло. Итак, более мощные транзисторы требуют более мощных драйверов.
Драйверы MOSFET ключей
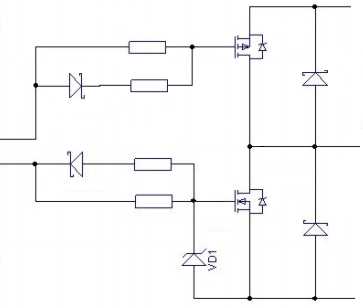
Что такое драйвер ключей и зачем он нужен? Зачем вообще нужны драйверы? Можно включать полевые транзисторы как показано на схеме:
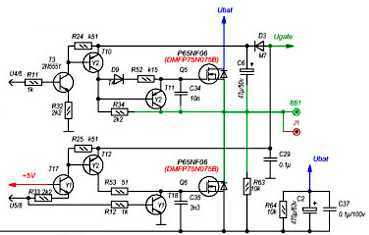
Да, в этом случае в качестве драйверов выступают биполярные транзисторы. Это также допустимо. Есть также схемы, где в качестве верхних ключей используются транзисторы с P-каналом, в качестве нижних – с N-каналом. То есть, используется два типа транзисторов, что не всегда удобно. К тому же P-канальные транзисторы большой мощности почти невозможно найти. Обычно использование такое сочетание транзисторов с различными каналами применяют в маломощных контроллерах для упрощения схемы.
Использовать однотипные транзисторы, обычно только N-канальные, значительно удобнее, однако это требует соблюдения некоторых требований по управления верхними транзисторами моста. Напряжение на затвор транзисторов надо подавать относительно их истоков (Source). В случае нижнего ключа вопросов не возникает, его виток (Source) присоединен к земле и мы можем спокойно подавать напряжение на затвор нижнего транзистора относительно земли. В случае верхнего транзистора все несколько сложнее, поскольку напряжение на его истоке (Source) изменяется относительно земли.
Объясню. Представим, что верхний транзистор открыт, через него протекает ток. В таком состоянии на транзисторе падает достаточно малое напряжение и можно сказать, что напряжение на истоке Source верхнего транзистора практически равно напряжению питания двигателя. Кстати, чтобы удерживать верхний транзистор открытым, нужно подать на его затвор напряжение, выше напряжение на его истоке (Source), то есть – выше напряжение питания двигателя.
Если верхний транзистор закрыт, а нижний открыт, то на истоке (Source) верхнего транзистора напряжение достигает практически нулю.
Драйвер верхнего ключа обеспечивает подачу на затвор полевого транзистора необходимое напряжение относительно его истоков (Source), и обеспечивает генерацию напряжения, большей по напряжение питания двигателя для управления транзистором. Этим, и не только этим, занимаются драйверы MOSFET ключей.
Выбор драйвера и их многообразие
Многообразие драйверов достаточно велико. Нас интересуют драйверы, которые имеют два входа для верхнего и нижнего ключей (драйверы верхнего и нижнего ключей). Например: IR2101, IR2010, IR2106, IR21064, IR2181, IR2110, IR2113 и др. Надо обратить внимание на параметр Vgs ваших транзисторов. Большинство драйверов рассчитаны для Vgs=20В. Если Vgs транзисторов меньше выходное напряжение драйверов, например Vgs транзистора = 5В, то драйверы с выходным напряжением 20В выведут такие транзисторы из строя.
Большинство драйверов питаются напряжением 10-20В и поддерживают входные сигналы различных уровней -3.3В, 5В, 15В.
Существуют драйверы для трехфазных мостовых схем, например:IR3230, IRS2334, IRS2334, IR21363, IR21364, IR21365, IR21368, IRS2336, IRS23364D, IRS2336D, IRS26310DJ, IR2130, IR2131, IR2132, IR2133, IR2135, IR2136, IRS2330, IRS2330D, IRS2332, IRS2332D, IR2233, IR2235, IR2238Q, IRS26302DJ.Такие драйверы ключей могут стать самым подходящим вариантом. К тому же в некоторых трехфазных драйверах есть дополнительная возможность для обеспечения защиты ключей от слишком большого тока и т.п. Довольно интересная серия драйверов IRS233x (D). Она обеспечивает широкий спектр защит, в том числе защиту от негативных скачков напряжения, защита от короткого замыкания, от перегрузки, защита от снижения напряжения в шине, от снижения напряжения питания, защита от перекрестного включения.
Один из важнейших показателей драйверов – это максимальный выходной ток. Обычно от 200мА до 4000мА. Может показаться что 4 Ампера – это слишком. Но все решает калькулятор. Как отмечалось выше скорость переключения ключей – очень важная вещь. Чем мощнее драйвер, тем меньше времени тратится на переключение ключей. Примерно рассчитать время переключения ключей можно по формуле:
ton = Qg*(Rh+R+Rg)/U
Где: Qg – полный заряд затвора полевого транзистора; Rh – внутреннее сопротивление драйвера. Рассчитывается как U/Imax, где U – напряжение питания драйвера, Imax – максимальной выходной ток. Обратите внимание, что максимальной выходной ток может быть различным для верхнего и нижнего транзистора; R – сопротивление резистора в цепи затвора; Rg – внутреннее сопротивление затвора транзистор; U – напряжение питания драйвера.
Например, если мы используем транзистор irfp4468pbf и драйвер IR2101 с максимальным током 200мА. А в цепи затвора резистор 20 Ом, тогда время переключения транзистора:
540*(12/0.2 + 20 + 0.8)/12 = 3636 нС
Заменив драйвер на IR2010, с максимальным током – 3А, и резистором в цепи затвора – 2ом, получим такое время переключения:
540*(12/3+2+0.8)/12 = 306 нС
То есть, с новым драйвером время переключения сократился более чем в 10 раз. Так что и тепловые потери на транзисторах значительно уменьшатся.
Расчет резисторов в цепи затвора
К сожалению я пока не нашел четких рекомендаций по расчету номиналов резисторов в цепи затвора силовых транзисторов. Их отсутствие или слишком мал номинал может вызвать нежелательные эффекты для драйверов, и, как следствие, неуправляемое открытия транзисторов (подробнее почитать можно здесь: http://integral.rv.ua/IR17.htm).
Я выработал для себя такое правило: сопротивление резистора в цепи затвора полевого транзистора должен быть не менее, чем внутреннее сопротивление драйвера, разделен на 3 Например, драйвер IR2101 питается напряжением 12В, максимальный ток – 0,25А. Его внутреннее сопротивление: 12В / 0,25 = 48Ом. В данном случае резистор в цепи затвора полевого транзистора должно быть больше, чем 48/3 = 16 Ом. Если время переключения транзисторов с выбранными резисторами не устраивает, следует выбрать более мощный драйвер.
Я не могу назвать эту методику идеальной, но она проверена практикой. Если кто сможет прояснить этот момент – буду благодарен.
Иногда к цепи затвора транзистора добавляют диода с резистором или без.
Это делается для того, чтобы увеличить скорость закрывания ключа. Для того чтобы защитить транзистор от чрезмерного напряжения Vgs иногда используют стабилитроны присоединены к затвору (Gate) и истоком (Sources) транзистора. Перед тем как использовать стабилитрон, выясните какая у него емкость. Обычные стабилитроны могут иметь существенную паразитную емкость, может значительно ухудшить ситуацию с временем открытия транзистора.
Защитные диоды
Поскольку во многих случаях силовые транзисторы работают с индуктивной нагрузкой, должны использоваться защитные диоды. Если их не будет, то при выключении транзистора вследствие переходных процессов на индуктивностях (обмотках двигателя) возникнет перенапряжение, что во многих случаях пробивает транзистор и выводит его из строя.
Во многих силовых транзисторах уже есть внутренние защитные диоды и нет необходимости использовать внешние диоды. Но не забудьте это проверить в документации на транзистора.
Dead-Time
Изменение состояния силовых ключей в регуляторе трехфазного бесколлекторного двигателя выполняется в следующей последовательности:
- выключаем ключ, который надо выключить;
- ждем некоторое время (Dead-Time) пока закроется транзистор (примерное время переключения транзистора мы рассчитывали ранее), и закончатся переходные процессы, связанные с коммутацией;
- включаем ключ, который надо включить.
Все драйверы верхнего и нижнего ключей имеют задержку между выходными сигналами чтобы не допустить одновременного открытия обоих транзисторов (смотри: Схема регулятора скорости бесколлекторного двигателя (ESC)). Но эта задержка слишком мала. Некоторые драйверы верхнего и нижнего ключей имеют реальный Dead-Time. Но в нашем случае, это абсолютно никак не поможет, потому что если вспомнить как переключаются ключи (смотри: Управление бесколлекторным двигателем), то мы увидим, что никогда не бывает такой ситуации, когда ключи одного плеча меняются состояниями. Итак, управлять Dead-Time должен микроконтроллер. Исключение может быть только в случае, когда вы используете специальной трехфазный драйвер, который управляет всеми шестью ключами и имеет реальный Dead-Time.
Датчики тока
Традиционно в качестве датчика тока используют шунт. Зная его сопротивление, измеряют на нем напряжение и вычисляют ток. Но для мощных систем использование шунта не всегда технически оправдано из за слишком больших тепловых потерь на нем. Датчики тока на эффекте Холла имеют практически нулевое сопротивление, поэтому они не греются. К тому же, как правило, питания и уровень выходного сигнала таких датчиков находятся в диапазоне 5В, что очень удобно для реализации регулятора на микроконтроллерах. В настоящее время довольно популярны датчики тока компании Allegro MicroSystems, например серии ACS71X, ACS75X.
Кроме обычного измерения уровня тока микроконтроллером, разумно создать схему аппаратной защиты от превышения критического уровня тока. Для измерения уровня тока микроконтроллер тратит некоторое время. Кроме того, ток измеряют периодически через некоторое время. Такие задержки, а также возможные программные ошибки могут создать ситуацию, когда критический ток успевает вывести из строя устройство еще до того, как придет момент следующего измерения. Схема должна отключать силовые ключи когда ток превышает критическое значение, независимо от работы микроконтроллера. Для реализации такой схемы обычно используют компаратор, на вход которого подают сигнал с датчика тока и опорный сигнал. При превышении допустимого тока компаратор срабатывает. Выход компаратора используют как дискретный сигнал в логических схемах, аварийно отключают ключи. Такая реализация имеет наименьшую задержку.
Некоторые драйверы имеют дополнительный вход для аварийного отключения ключей, что значительно упрощает создание безопасной схемы регулятора (ESC) безколесторного двигателя (BLDC).
Успехов!
P.S. Этой публикацией я завершаю цикла статей о трехфазные бесколлекторных двигателях, которого начал год назад. Это не означает, что больше не будет ни слова о бесколлекторных двигателях. Статьи об электродвигателях еще будут, но это будут отдельные материалы, конкретные реализации и т.д. Надеюсь, что моя работа не была напрасной.
Статьи по бесколлекторным двигателям:
www.avislab.com
принцип работы, управление бесколлекторными электродвигателями. Бесколлекторный электродвигатель своими руками
Применяются бесколлекторные электродвигатели в медицинской технике, авиамоделировании, трубозапорных приводах нефтепроводов, а также во многих других отраслях. Но у них имеются свои недостатки, особенности, а также преимущества, которые порой играют ключевое значение при проектировании различных устройств. Как бы то ни было, такие электродвигатели занимают относительно малую нишу, если сравнивать их с асинхронными машинами переменного тока.
Особенности электромоторов
Одна из причин, по которой конструкторы проявляют интерес именно к бесколлекторным электродвигателям — это необходимость в высокооборотных моторах с небольшими размерами. Причём у этих двигателей очень точное позиционирование. В конструкции имеется подвижный ротор и неподвижный статор. На роторе находится один постоянный магнит или несколько, расположенных в определённой последовательности. На статоре же находятся катушки, которые создают магнитное поле.

Нужно отметить еще одну особенность — бесколлекторные электродвигатели могут иметь якорь, расположенный как внутри, так и на внешней стороне. Следовательно, два типа конструкции могут иметь определенное применение в различных сферах. При расположении якоря внутри получается добиться очень высокой скорости вращения, поэтому такие моторы очень хорошо работают в конструкциях систем охлаждения. В том случае, если устанавливается привод с внешним расположением ротора, можно добиться очень точного позиционирования, а также высокой устойчивости к перегрузкам. Очень часто такие моторы используются в робототехнике, медицинском оборудовании, в станках с частотным программным управлением.
Как работают моторы
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.
Другими словами, при помощи драйвера получается регулировать момент вращения, который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить скорость вращения ротора электродвигателя.
Отличия коллекторных и бесколлекторных двигателей
Основное отличие заключается в том, что на бесколлекторных электродвигателях для моделей отсутствует обмотка на роторе. В случае с коллекторными электромоторами, на их роторах имеются обмотки. А вот постоянные магниты устанавливаются на неподвижной части двигателя. Кроме того, на роторе устанавливается специальной конструкции коллектор, к которому производится подключение графитовых щёток. С их помощью подается напряжение на обмотку ротора. Принцип работы бесколлекторного электродвигателя тоже существенно отличается.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.

Скорость вращения ротора зависит напрямую от того, насколько интенсивно магнитное поле, а последняя характеристика зависит напрямую от величины напряжения. Следовательно, чтобы увеличить или уменьшить частоту вращения, необходимо изменить напряжение питания.
Для реализации реверса потребуется только лишь изменить полярность подключения мотора. Для такого управления не нужно использовать специальные микроконтроллеры, изменять частоту вращения можно при помощи обычного переменного резистора.
Особенности бесколлекторных машин
Но вот управление бесколлекторным электродвигателем невозможно без использования специальных контроллеров. Исходя из этого, можно сделать вывод, что в качестве генератора моторы такого типа применяться не могут. Для эффективности управления можно отслеживать положение ротора с помощью нескольких датчиков Холла. При помощи таких несложных устройств получается значительно улучшить характеристики, но стоимость электродвигателя увеличится в несколько раз.
Запуск бесколлекторных моторов

Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
- Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
- Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
- Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
- Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера. Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
- Дешёвые модели микроконтроллерных устройств имеют частоту генерируемых импульсов в интервале 7...8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение. Оно генерируется в катушках статора, не подключенных на данный момент времени. Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током. Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи. Они позволяют из постоянного напряжения сделать трехфазные импульсы.

Работа происходит следующим образом:
- На катушку "А" поступают импульсы с положительным значением. На катушку "В" - с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки "А", при этом импульс положительного значения поступает на обмотку "С". Коммутация обмотки "В" не претерпевает изменений.
- На катушку "С" попадается положительный импульс, а отрицательный поступает на "А".
- Затем вступает в работу пара "А" и "В". На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку "В", а отрицательный на "С".
- На последнем этапе происходит включение катушки "А", на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.
fb.ru
Бесколлекторные двигатели постоянного тока. Определение положения ротора в остановленном состоянии двигателяЗапуск бездатчикового бесколекторного двигателя (Sensorless BLDC)
В предыдущей статье(Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC) мы рассмотрели алгоритм коммутаций для бесколлекторного бездатчикового двигателя постоянного тока при вращающемся роторе. Сегодня рассмотрим простой способ запуска бесколлекторного бездатчикового двигателя.
Итак, когда ротор не вращается, мы не можем определить его положение. Мы помним, что в бездатчиковом двигателе положение ротора определяется исходя из ЭДС, наводимой в свободной обмотке во время вращения двигателя. Эта ЭДС возникает при перемещении магнитов ротора относительно обмоток статора. Поскольку вращения нет, нет наводимой ЭДС, узнать положение ротора этим методом не представляется возможным.
Самый простой способ – это установить ротор в заведомо известное положение, подав напряжение на две из обмоток двигателя. Выждать паузу, пока ротор займет положение, после чего начать коммутировать согласно таблице, приведенной в предыдущей статье. В зарубежной литературе такой метод называют “Align”. Этот метод применяется на большинстве мало инерционных, слаботочных двигателях. Рассмотрим его подробнее.
Первый этап
Первый этап – это установка ротора в начальное положение. Установим ротор в положение P1. Согласно таблице открываем ключи SW1, SW5. Однако, если просто открыть ключи, ток будет быстро расти и достигнет тока короткого замыкания к моменту когда ротор займет свое положение. Такой шок может вывести со строя обмотку двигателя или ключи регулятора, но скорее всего, сработает защита по току. Для того, чтобы этого не произошло, на SW1, SW5 следует подавать ШИМ сигнал. Скважностью ШИМ сигнала устанавливают уровень безопасного напряжения. Чем меньше напряжение, тем мягче и медленнее происходит позиционирование ротора. Чем выше напряжение, тем быстрее и с большими вибрациями происходит позиционирование. Слишком малое напряжение же может вовсе не провернуть ротор. А слишком большое – вызвать нежелательные колебания ротора и увеличить время позиционирования.
Время установки ротора в начальное положение зависит не только от напряжения, приложенного к обмоткам статора, но и от инертности двигателя и нагрузки на валу. Чем больше масса ротора и приводимого им устройства на валу, тем медленнее он будет устанавливаться в начальное положение. Важно правильно определить время, которое нужно выждать между подачей напряжения на обмотки и окончанием позиционирования ротора. Если вы продолжите запуск двигателя до того, как ротор установился в начальное положение, старт может оказаться неуспешным. Если позже – обмотки будут греться под воздействием тока. В большинстве случаев скважность ШИМ и время установки ротора в начальное положение определяют экспериментально. В особо ответственных случаях для этого используют специальные приборы, которые помогают анализировать колебательные вращения ротора при установке его в начальное положение и последующем старте.
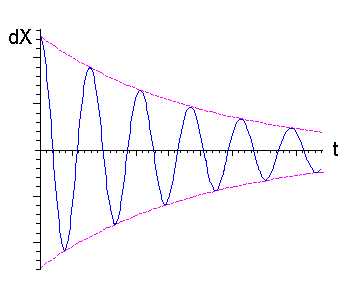
Если изобразить временную диаграмму установки ротора в начальное положение, она будет иметь форму затухающих колебаний. Важно понимать, что ротор может находиться в одном их 6 положений и для того чтобы занять исходное положение ему придется провернуться на разный угол, соответственно это может занять разное время.
Второй этап
Теперь, когда положение ротора известно, мы можем переключить ключи в состояние P2, ротор начнет вращаться к следующему положению. Казалось бы, задача сводится к ранее решенной в предыдущей статье. Но, скорость вращения ротора еще слишком мала чтобы по наводимой в статоре ЭДС можно было определить положение ротора. Поэтому, первые несколько переключений выполняют асинхронно. Т.е. не определяя положения ротора. Количество асинхронных переключений зависит от инертности двигателя. Чем более массивный, а значит: инертный ротор, – тем длительнее разгон и необходимо будет выполнить большее число асинхронных переключений. При этом период между переключениями с каждым разом сокращают. Таким образом, разгоняя ротор двигателя. Разумеется, что разгон двигателя зависит от того, насколько чётко Вы угадаете момент следующего переключения. Ведь если переключение произойдет намного раньше или намного позже, ротор будет тормозиться.
Третий этап
В момент последнего асинхронного переключения переходим в режим управления двигателем, считая, что он вращается, а положение ротора соответствует текущему состоянию ключей. Т.е. пытаемся определить его положение, используя метод, описанный в предыдущей статье. Однако, не всегда получается запустить двигатель с первого раза. В алгоритме управления следует предусмотреть контроль вращения ротора двигателя. Если старт не удался, следует вовремя отключить питание. В противном случае при остановленном двигателе и открытых ключах могут выйти со строя, как двигатель, так и регулятор. Один из способов контроля вращения ротора – измерение времени прошедшего от момента предыдущего переключения ключей. Если прошло слишком много времени, а положение ротора не изменилось, значит, двигатель заклинило. Это позволит отключить двигатель при заклинивании или неудачном старте еще до момента достижения критического значения тока.
В случае неудачного старта попытку повторяют.
Такой способ старта будет однозначно сопровождаться колебаниями ротора. В момент старта возможно проворачивание ротора в противоположную сторону от необходимого направления. Частично устранить недостатки такого способа запуска бездатчикового бесколлекторного двигателя может определение положения ротора в остановленном состоянии. Один из методов определения положения ротора в остановленном состоянии будет рассмотрен в следующей статье.
Статьи по бесколлекторным двигателям:
www.avislab.com





Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






