Arduino Mini | Аппаратная платформа Arduino
Общие сведения
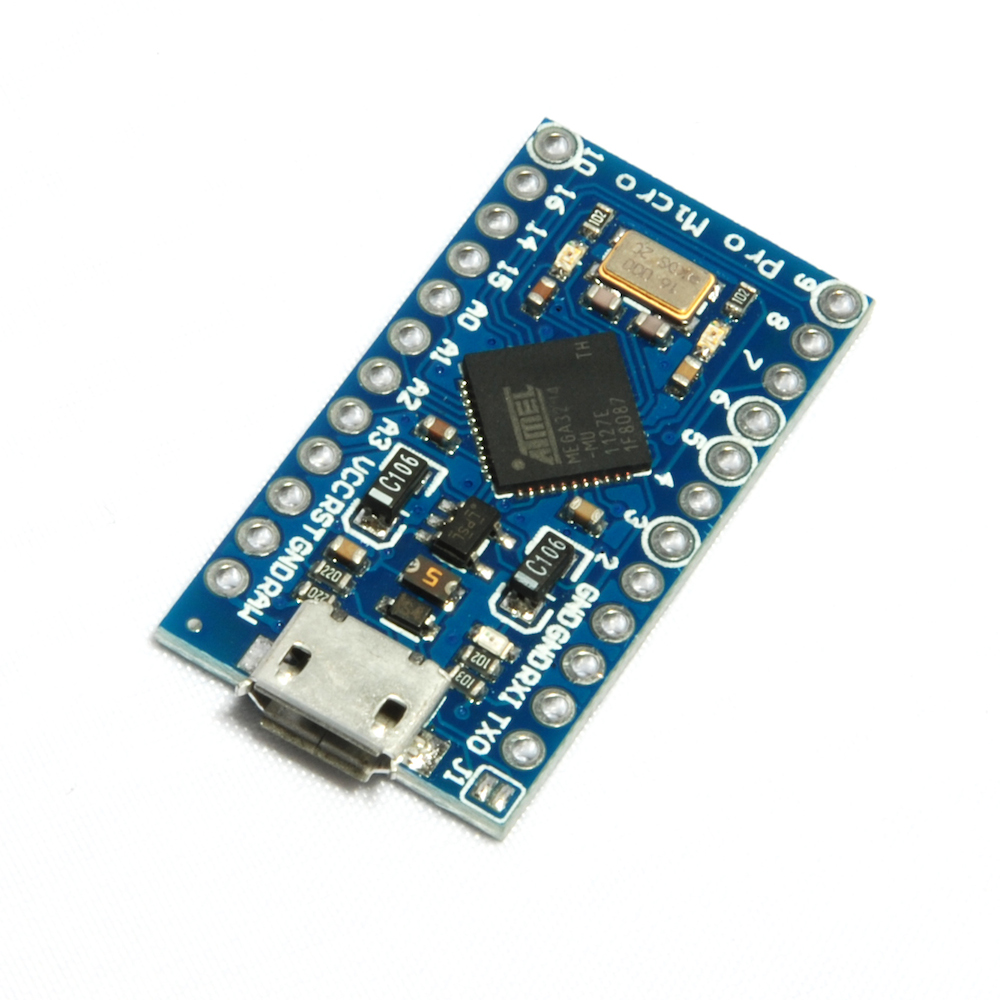
Arduino Mini построена на микроконтроллере ATmega168 (технические данные) и предназначена для использования в лабораторных работах и проектах, где пространство является критическим параметром. Платформа содержит 14 цифровых входов и выходов (6 из которых могут использоваться как выходы ШИМ), 8 аналоговых входов и кварцевый генератор 16 МГц. Программируется при помощи адаптера Mini USB или любого преобразователя USB или RS232 в TTL.
Внимание: запрещается подключать напряжение, превышающее 9 В, или менять его полюсы, это может повредить платформу.
Краткие характеристики
Микроконтроллер | ATmega168 |
Рабочее напряжение | 5 В |
Входное напряжение | 7-9 В |
Цифровые Входы/Выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
Аналоговые входы | 8 (4 из которых имеют выводы) |
Постоянный ток через вход/выход | 40 мА |
Флеш-память | 16 Кб (2 используются для загрузчика) |
ОЗУ | 1 Кб |
Энергонезависимая память | 512 байт |
Тактовая частота | 16 МГц |
Программирование
Платформа программируется посредством ПО Arduino. Подробная информация находится в справочнике.
Для программирования Arduino Mini требуется адаптер Mini USB или любой преобразователь USB или RS232 в TTL.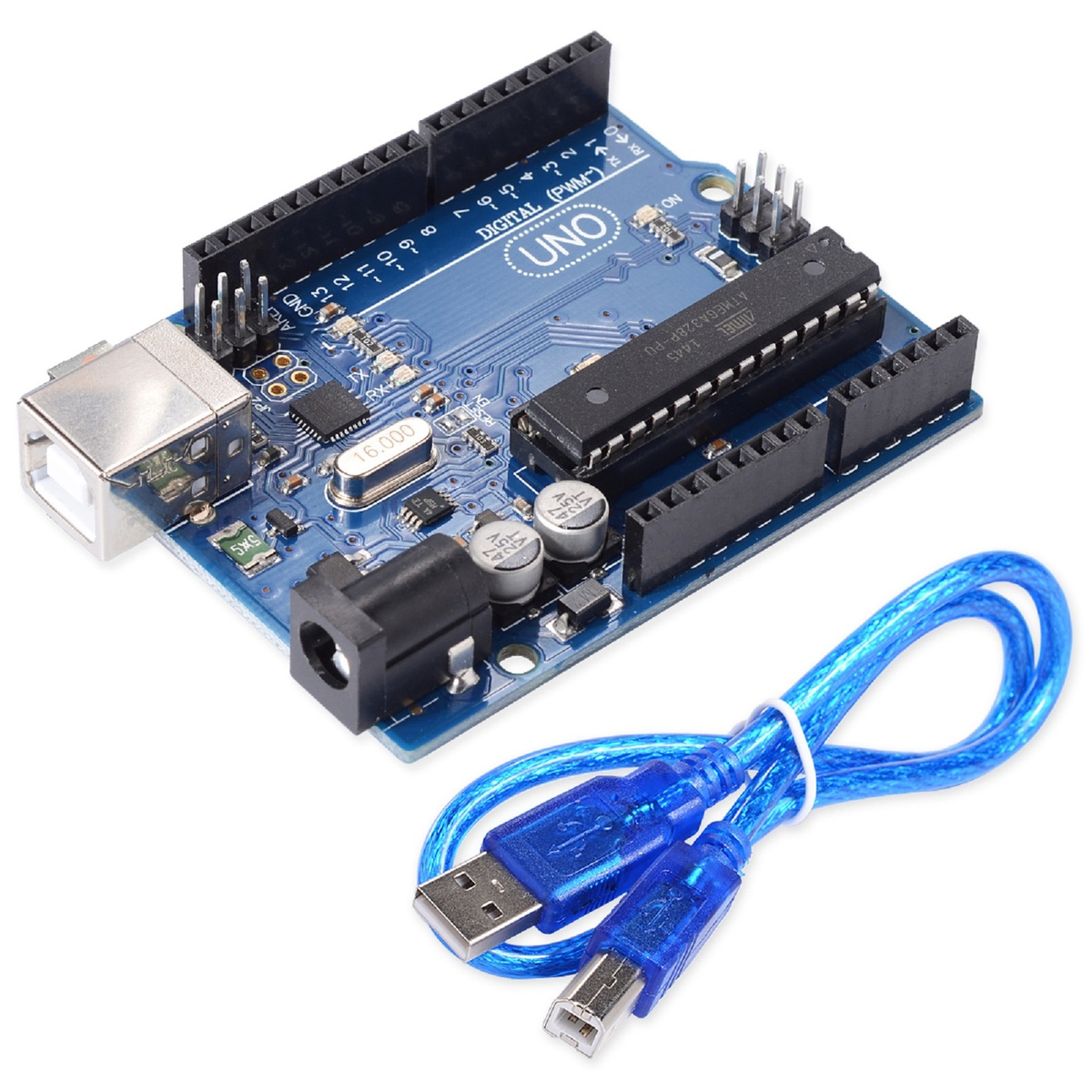 Обратитесь к данной странице за дополнительными инструкциями по началу работы с платформой.
Обратитесь к данной странице за дополнительными инструкциями по началу работы с платформой.
Микроконтроллер ATmega168 поставляется с записанным загрузчиком, облегчающим запись новых программ без использования встроенных программаторов. Связь с загрузчиком осуществляется оригинальным протоколом STK500.
Имеется возможность использовать ICSP (внутрисхемное программирование) вместо загрузчика.
Входы и Выходы
Каждый из 14 цифровых выводов может использоваться как вход или выход. Выводы работают при напряжении 5 В. Каждый вывод имеет нагрузочный резистор (стандартно отключен) 20-50 кОм и может пропускать до 40 мА. Выводы 3, 5, 6, 9, 10, и 11 могут использоваться для ШИМ; подробности в описании функции analogWrite(). Подключение к выводам 0 и 1 любых устройств, кроме адаптера Mini USB, может прервать подключение по USB или запись нового программного кода.
На платформе Mini установлены 8 аналоговых входов, каждый разрешением 10 бит (т.е. может принимать 1024 различных значения). Входы 0 – 3 имеют выводы, а для подключения входов 4 – 7 требуется пайка. Стандартно входы имеют диапазон измерения до 5 В относительно земли, тем не менее имеется возможность изменить верхний предел посредством вывода AREF и программного кода низшего уровня.
Обратите внимание на соединение между выводами Arduino и портами ATmega168.
Разводка выводов
Примечание: расположение выводов на версии платформы 04 отличается от расположения на версии 03.
| Расположение выводов Arduino Mini 03. (совместима с ранними версиями, но отсутствует вывод IO7) | Расположение выводов Arduino Mini 04. (Вывод заземления смещен ниже на один вывод.) |
Принципиальная схема
Схема Arduino Mini 04
Схема Arduino Mini 03
Файлы Gerber для Arduino Mini 04 (оригинальные файлы платформы, созданные не в Eagle)
Файлы для адаптера Mini USB
Смотрите также
Arduino Pro | Аппаратная платформа Arduino
Общие сведения
Arduino Pro построена на одном из микроконтроллеров: ATmega168 (техническое описание) или ATmega328 (техническое описание). Pro производится в обоих исполнениях 3.3 В / 8 МГц и 5 В / 16 МГц. Платформа содержит 14 цифровых входов и выходов (6 из которых могут использоваться как выходы ШИМ), 6 аналоговых входов, силовой разъем батареи, силовой выключатель, кнопку перезагрузки, отверстия для монтажа силового разъема, блок ICSP и блоки выводов. Шестипиновый блок может подключаться к кабелю FTDI или плате-конвертеру Sparkfun для обеспечения питания и связи через USB.
Pro производится в обоих исполнениях 3.3 В / 8 МГц и 5 В / 16 МГц. Платформа содержит 14 цифровых входов и выходов (6 из которых могут использоваться как выходы ШИМ), 6 аналоговых входов, силовой разъем батареи, силовой выключатель, кнопку перезагрузки, отверстия для монтажа силового разъема, блок ICSP и блоки выводов. Шестипиновый блок может подключаться к кабелю FTDI или плате-конвертеру Sparkfun для обеспечения питания и связи через USB.
Arduino Pro предназначена для непостоянной установки в объекты или экспонаты. Платформа поставляется без установленных выводов, что позволяет пользователям применять собственные выводы и разъемы. Расположение выводов совместимо с платами расширения Arduino. Версия 3.3 В Pro может получать питание от батареи.
Arduino Pro разработана и производится SparkFun Electronics.
Схема и исходные данные
Файлы EAGLE: arduino-pro-reference-design.zip
Принципиальная схема: Arduino-Pro-schematic.pdf
Характеристики
Микроконтроллер | ATmega168 или ATmega328 |
Рабочее напряжение | 3.3 В или 5 В |
Входное напряжение | 3.35-12 В (версии 3.3 В) или 5-12 В (версии 5 В) |
Цифровые Входы/Выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
Аналоговые входы | 6 |
Постоянный ток через вход/выход | 40 мА |
Флеш-память | 16 Кб (ATmega168) или 32 Кб (ATmega328) при этом 2 Кб используются для загрузчика |
ОЗУ | 1 Кб (ATmega168) или 2 Кб (ATmega328) |
EEPROM | 512 байт (ATmega168) или 1 Кб (ATmega328) |
Тактовая частота | 8 МГц (версии 3. |
 3 В) или 16 МГц (версии 5 В)
3 В) или 16 МГц (версии 5 В)Питание
Arduino Pro может получать питание через подключение USB, от батареи или от внешнего источника питания. Силовым разъемом батареи на платформе является блок JST, а силовой разъем внешнего источника припаивается к платформе.
Выводы питания:
- VIN. На вывод подается напряжение от батареи или источника напряжения постоянного тока (согласно позиции выключателя). Подача напряжения питания происходит через данный вывод.
- VCC. Регулируемый источник питания. Напряжение от батареи или источника напряжения постоянного тока подается через регулятор или от конвертора USB-to-TTL.
- GND. Выводы заземления.
Память
Микроконтроллер ATmega168 имеет: 16 кБ флеш-памяти для хранения кода программы (2 кБ используется для хранения загрузчика), 1 кБ ОЗУ и 512 байт EEPROM (которая читается и записывается с помощью библиотеки EEPROM). А микроконтроллер ATmega328, в свою очередь, имеет 32 кБ флеш-памяти, 2 Кб ОЗУ и 1 Кб EEPROM.
Входы и Выходы
Каждый из 14 цифровых выводов Pro, используя функции pinMode(), digitalWrite(), и digitalRead(), может настраиваться как вход или выход. Выводы работают при напряжении 3,3 В. Каждый вывод имеет нагрузочный резистор (стандартно отключен) 20-50 кОм и может пропускать до 40 мА. Некоторые выводы имеют особые функции:
- Последовательная шина: 0 (RX) и 1 (TX). Выводы используются для получения (RX) и передачи (TX) данных TTL. Данные выводы имеют соединение с выводами TX-0 и RX-1 блока из шести выводов.
- Внешнее прерывание: 2 и 3. Данные выводы могут быть сконфигурированы на вызов прерывания либо на младшем значении, либо на переднем или заднем фронте, или при изменении значения. Подробная информация находится в описании функции attachInterrupt().
- ШИМ: 3, 5, 6, 9, 10, и 11. Любой из выводов обеспечивает ШИМ с разрешением 8 бит при помощи функции analogWrite().

- SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Посредством данных выводов осуществляется связь SPI, которая, хотя и поддерживается аппаратной частью, не включена в язык Arduino.
- LED: 13. Встроенный светодиод, подключенный к цифровому выводу 13. Если значение на выводе имеет высокий потенциал, то светодиод горит.

На платформе Pro установлены 6 аналоговых входов, каждый разрешением 10 бит (т.е. может принимать 1024 различных значения). Стандартно выводы имеют диапазон измерения до значения VCC относительно земли, тем не менее имеется возможность изменить верхний предел посредством вывода AREF и программного кода низшего уровня. Некоторые выводы имеют дополнительные функции:
- I2C: 4 (SDA) и 5 (SCL). Посредством выводов осуществляется связь I2C (TWI), для создания которой используется библиотека Wire.
Дополнительная пара выводов платформы:
- AREF. Опорное напряжение для аналоговых входов. Используется с функцией analogReference().
- Reset. Низкий уровень сигнала на выводе перезагружает микроконтроллер. Обычно применяется для подключения кнопки перезагрузки на плате расширения, закрывающей доступ к кнопке на самой плате Arduino.
Обратите внимание на соединение между выводами Arduino и портами ATmega168.
Связь
На платформе Arduino Pro установлено несколько устройств для осуществления связи с компьютером, другими устройствами Arduino или микроконтроллерами.ATmega168 и ATmega328 поддерживают последовательный интерфейс UART TTL, осуществляемый выводами 0 (RX) и 1 (TX). Мониторинг последовательной шины (Serial Monitor) программы Arduino позволяет посылать и получать текстовые данные через подключение USB.
Библиотекой SoftwareSerial возможно создать последовательную передачу данных через любой из цифровых выводов Pro.
ATmega168 и ATmega328 поддерживают интерфейсы I2C (TWI) и SPI. В Arduino включена библиотека Wire для удобства использования шины I2C. Более подробная информация находится в документации. Для использования интерфейса SPI обратитесь к техническим данным микроконтроллеров ATmega168 и ATmega328.
В Arduino включена библиотека Wire для удобства использования шины I2C. Более подробная информация находится в документации. Для использования интерфейса SPI обратитесь к техническим данным микроконтроллеров ATmega168 и ATmega328.
Программирование
Платформа программируется посредством ПО Arduino. Подробная информация находится в справочнике и инструкциях.
Микроконтроллеры ATmega168 и ATmega328 поставляются с записанным загрузчиком, облегчающим запись новых программ без использования внешних программаторов. Связь осуществляется оригинальным протоколом STK500.
Имеется возможность не использовать загрузчик и запрограммировать ATmega168 или ATmega328 через выводы ICSP (внутрисхемное программирование).
Автоматическая (программная) перезагрузка
Arduino Pro разработана таким образом, чтобы перед записью нового кода перезагрузка осуществлялась самой программой, а не нажатием кнопки на платформе. Один из выводов шестипинового блока подключен к линии перезагрузки микроконтроллеров ATmega168 или ATmega328 через резистор 100 нФ. Данный вывод соединен с одной из линий управления потоком конвертора USB-to-serial, подключенного к блоку: к линий RTS при использовании кабеля FTDI или к линии DTR при использовании платы-конвертора Sparkfun. Активация данной линии, т.е. подача сигнала низкого уровня, перезагружает микроконтроллер. Программа Arduino, используя данную функцию, загружает код одним нажатием кнопки Upload в самой среде программирования. Подача сигнала низкого уровня по линии перезагрузки скоординирована с началом записи кода, что сокращает таймаут загрузчика.
Функция имеет еще одно применение. Перезагрузка Pro происходит каждый раз при подключении к программе Arduino на компьютере с ОС Mac X или Linux (через USB). Следующие полсекунды после перезагрузки работает загрузчик. Во время программирования происходит задержка нескольких первых байтов кода во избежание получения платформой некорректных данных (всех, кроме кода новой программы). Если производится разовая отладка скетча, записанного в платформу, или ввод каких-либо других данных при первом запуске, необходимо убедиться, что программа на компьютере ожидает в течение секунды перед передачей данных.
Если производится разовая отладка скетча, записанного в платформу, или ввод каких-либо других данных при первом запуске, необходимо убедиться, что программа на компьютере ожидает в течение секунды перед передачей данных.
Физические характеристики
Длинна и ширина печатной платы Pro составляют 5,2 и 5.3 см соответственно. Разъем USB и силовой разъем выходят за границы данных размеров. Четыре отверстия в плате позволяют закрепить ее на поверхности. Расстояние между цифровыми выводами 7 и 8 равняется 0,4 см, хотя между другими выводами оно составляет 0,25 см.
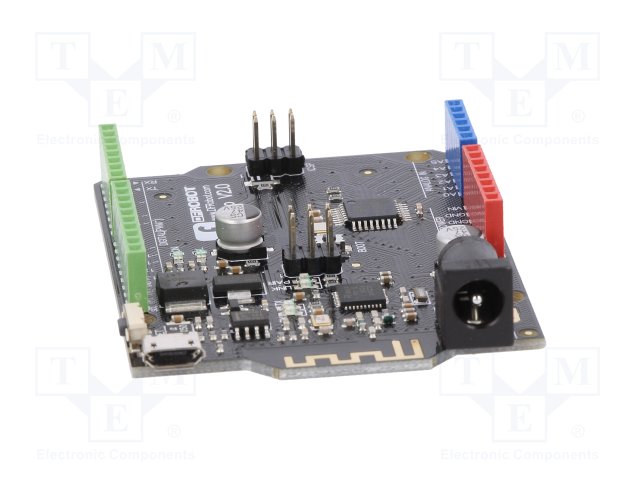
Контроллер для квадрокоптера на базе Arduino своими руками||Arduino-diy.com
Для того, чтобы ваш квадрокоптер на Arduino благополучно взлетел, надо обеспечить минимальный вес всей конструкции.
В нем важен каждый грамм. Именно по этой причине часто используют миниатюрную Arduino Nano, которую устанавливают на монтажной плате. В этом проекте предложена конструкция платы управления для квадрокоптера с минимально необходимой обвязкой и платами Arduino Nano и GY80.
Какого-то супер концепта в предложенной конструкции нет. Ее можно сделать и получше, но надеюсь, что благодаря этим материалам у кого-то появятся собственные идеи или же вы воспользуетесь предложенным решением.
Arduino-контроллер для квадрокоптера
Ниже представлена информация о конструкции контроллера. Свободное пространство в правом верхнем углу было оставлено специально, чтобы была возможность расширить модуль. Например, установить GPS или ультразвуковой датчик расстояния.
Предложенная конструкция контроллера для квадрокоптера на Arduino Nano имеет ряд недостатков. Некоторые размышления на этот счет приведены ниже.
Вход BEC для питания квадрокоптера
Все, кроме одного контакта питания BEC (cистема питания приемника и квадрокоптера от силовой батареи и отключении мотора при достижении порогового напряжения) должны быть отключены. Порой на форумах люди заявляют, что несколько источников питания может вызывать неполадки из-за разницы в напряжениях (что очень похоже на правду, так как на них действительно разные регуляторы напряжения, хоть и очень маленькие). Отделить подключение сзади невозможно, так как там припаяно. Так что приходится отделять контакты моторов 2,3 и 4, чтобы в результате оставались только контакты сигнала и земли.
Порой на форумах люди заявляют, что несколько источников питания может вызывать неполадки из-за разницы в напряжениях (что очень похоже на правду, так как на них действительно разные регуляторы напряжения, хоть и очень маленькие). Отделить подключение сзади невозможно, так как там припаяно. Так что приходится отделять контакты моторов 2,3 и 4, чтобы в результате оставались только контакты сигнала и земли.
По сути эти источники питания BEC 5 В надо убрать или использовать в других целях. Например, можно предусмотреть дополнительный источник питания для контроллера, если первый перестал работать. Остальные BEC можно использовать для серводвигателей видеокамеры.
Расположение контактов для мотора и ресивера
Контакты для моторов желательно разместить в четырех различных углах для более простого доступа к ним. Контакты для ресивера (приемника) желательно располагать неподалеку от контактов питания.
Сокет для микроконтроллера
Для того, чтобы передавать данные по GPS или использовать ультразвуковой датчик расстояния с Arduino Nano, UNO или Pro Mini, нам понадобится дополнительный микроконтроллер. Он будет обрабатывать данные с GPS или сонар модулей и передавать их на плату контроллера полета через I2C.
Очень удобная фича — встроенный сокет для легкого подключения по I2C для периферийных устройств.
2 дополнительных контакта для моторов (для гексакоптера) показаны на риунке ниже.
Другие проекты контроллеров для квадрокоптеров
Ниже приведены несколько других проектов контроллеров для квадрокоптеров на базе Arduino.
Плата контроллера может использоваться для три- и квадрокоптера с возможностью дополнительной установки камеры и стабилизацией тангажа.
Для питания сенсоров используется 3.3 В постоянный ток от Arduino Nano.
Контроллер, выполненный в круглом форм-факторе. Контроллер можно использовать на три- и квадрокоптерах.
Еще один круглый контроллер. Может использоваться для три- и квадрокоптеров. Можно подключить видеокамеру. Предусмотрена стабилизация тангажа и крен.
Можно подключить видеокамеру. Предусмотрена стабилизация тангажа и крен.
Предусмотрена проверка питания. Если питание отсутствует, подается сигнал на динамик. Можно запитать плату от отдельного BEC. На контроллере установлен светодиод для отслеживания состояния и питания.
Есть интересные серийные контроллеры для квадрокоптера на Arduino. Например, в пердставленом ниже тоже используется круглый форм-фактор плат. Этот контроллер можно использовать для три- квадро-, гексакоптера. Поддерживаются все фичи MultiWii версии 1.6. Кроме того, на плате есть встроенный регулятор 3.3 вольт.
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Контроллер ЛАРТ. Ардуино с винтовыми клеммами
Описание
Контроллер LART LM-AN
Особенности контроллера
Контроллер Arduino nano — один из самых популярных контроллеров в линейке контроллеров Arduino.
Модуль LART LM-AN выполнен по схеме полностью повторяющей схему Arduino nano с единственным отличием. Пины процессора Atmega328 выведены на винтовые клеммы.
Применение контроллеров на основе Arduino nano
В первую очередь это отладочная плата при разработке различных проектов.
Игровые устройства
— Светодиодный куб;
— Музыкальная шкатулка;
Учебное оборудование
— конструкторы роботов;
— конструкторы по основам схемотехники и программирования;
Устройства автоматики
— таймеры;
— регуляторы температуры, оборотов электродвигателей;
— кодовые замки;
— программируемые реле;
Бытовая электроника:
— электронные часы;
— метеостанция;
Характеристики контроллера
| Микроконтроллер | Atmel ATmega328 |
| Рабочее напряжение (логический уровень) | 5 В |
| Входное напряжение (рекомендуемое) | 7-12 В |
| Входное напряжение (предельное) | 6-20 В |
| Цифровые Входы/Выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
| Аналоговые входы | 8 |
| Постоянный ток через вход/выход | 40 mAh с одного вывода и 500 mAh со всех выводов |
| Флеш-память | 32 Кб (ATmega328) при этом 2 Кб используются для загрузчика |
| Тактовая частота | 16 МГц |
| ОЗУ | 2 Кб |
| EEPROM | 1 Кб |
Существенным отличием модуля LM-AN является наличие винтовых клемм. Это упрощает подключение к контроллеру различных внешних модулей, устройств. Внешние модули подключаются проводами к клеммам модуля.
Это упрощает подключение к контроллеру различных внешних модулей, устройств. Внешние модули подключаются проводами к клеммам модуля.
Расположение пинов в модуле
Выводные ножки контроллера подключены к винтовым клеммам и размещены так, как показано на картинке ниже:
GND — клеммы для подключения минусового провода источника питания.
D0 — клемма цифрового пина. Так же TX
D1 — клемма цифрового пина. Так же RX
D2 — D13 — клеммы цифровых пинов процессора.
A0 — A7 — клеммы аналоговых пинов процессора.
Vcc — клемма подключения внешнего источника стабилизированного напряжения 5В
BAT — клемма подключения внешнего источника нестабилизированного напряжения 7-12В
Первые два вывода используются либо для связи по классическому последовательному интерфейсу с другим устройством, либо как порты для двоичных данных. В arduino nano распиновка 5…16 выводов, кроме указанных, имеет дополнительные функции:
D5 – прерывание INT0;
D6 – прерывание INT1 / ШИМ / AIN0;
D7 – таймер-счетчик T0 / шина I2C SDA / AIN1;
D8 – таймер-счетчик T1 / шина I2C SCL / ШИМ;
D3, D5, D6, D9,D10, D11 – ШИМ;
AIN0 и AIN1 – это входы быстродействующего аналогового компаратора. Кроме того, имеется 6 каналов с выходом широтно-импульсного модулятора (ШИМ). К тому же имеется большее число пинов, на которые могут быть переведены запросы прерываний.
Программирование контроллера осуществляется в среде Arduino IDE
Контроллер теплицы своими руками
Синие модули реле подкупают своей ценой, но нужно понимать, что серьёзную нагрузку (>2кВт) они не потянут. Можно при помощи этих реле управлять другими, более мощными контакторами. Для управления сетевым оборудованием рекомендуется использовать твердотельные реле. “Синие” реле также очень сильно искрят и спокойно станут причиной зависаний контроллера! Обязательно почитайте про искрогасящие цепи ниже!
Твердотельные реле хороши, но греются. Для коммутации мощностей выше 600-1000 Ватт даже большой твердотелке придётся поставить радиатор, для этого нижняя её часть представляет собой металлическую пластину.
Для коммутации мощностей выше 600-1000 Ватт даже большой твердотелке придётся поставить радиатор, для этого нижняя её часть представляет собой металлическую пластину.
Несмотря на простоту и очевидность подключения нагрузки через реле, можно столкнуться с практически «магическими» проблемами, проявляющимися как глюки в системе контроллера, вплоть до зависания и перезагрузки, и неадекватное поведение дисплея.
Таким образом реле может управлять практически чем угодно, но проблемы возникают именно с индуктивной нагрузкой, причём как постоянного, так и переменного тока. При резком включении и отключении индуктивной нагрузки создаётся выброс, напряжение которого может в несколько раз превышать напряжение питания цепи, этот выброс провоцирует электромагнитные наводки в электрических цепях, которые приводят к сбоям в работе микроконтроллера и других компонентов. Индуктивной нагрузкой являются моторы (приводы, помпы) и соленоиды (электромагниты, соленоидные клапаны и проч.). Коммутация такой нагрузки без защиты от выбросов будет приводить к сбоям в работе контроллера, поэтому давайте рассмотрим несколько способов более-менее защиты от таких проблем.
Что почитать по теме:
Постоянный ток
Самые жизненные примеры – помпа и клапан на 12V, которые управляются от блока питания. Самый первый и обязательный шаг к защите от индуктивных выбросов – диод, установленный встречно-параллельно индуктивной нагрузке. Диод рекомендуется припаивать как можно ближе к нагрузке, а не к реле, чтобы между нагрузкой и диодом было как можно меньше проводов. Это рекомендация, совсем необязательно резать провод у помпы под корень и ставить туда диод – можно разместить диод непосредственно у выводов реле, такой вариант тоже будет работать, но хуже. Смотрите схему выше.
Постоянный и переменный ток
Очень распространённым способом защиты цепи является RC цепь (она же искрогасящая цепь, снаббер), представляющая собой резистор и конденсатор. RC цепь можно поставить параллельно выводам реле (т.е. последовательно с нагрузкой), что очень удобно. Смотрите схему и выбор номиналов выше.
RC цепь можно поставить параллельно выводам реле (т.е. последовательно с нагрузкой), что очень удобно. Смотрите схему и выбор номиналов выше.
Переменный ток
Для цепей переменного тока есть ещё один совет: используйте твердотельные реле с детектором перехода через ноль (zero detection, zero-cross), они также называются «бесшумные» реле, т.к. в них коммутация происходит в момент перехода напряжения через ноль, и выброс практически равен нулю.
ClearCore – это совместимый с Arduino промышленный контроллер ввода-вывода и движения
Teknic, американский производитель компонентов управления сервоприводами, разработал промышленный контроллер ввода-вывода и движения ClearCore на базе Microchip SAME53 Arm Cortex-M4, который можно запрограммировать с помощью Arduino IDE для быстрого прототипирования или Atmel Studio 7 с более продвинутым C++ API для более сложных проектов.
ClearCore предлагает четыре оси движения, аналоговый и цифровой ввод / вывод, совместимый с напряжением 24 В, поддержку модулей расширения ввода / вывода, а также последовательное и / или Ethernet-подключения через RJ45 порты. Также можно подключать несколько ClearCore для более крупных решений.
Ключевые особенности и характеристики ClearCore:
- MCU – микроконтроллер Microchip SAME53 Arm Cortex-M4F с тактовой частотой до 120 МГц, с 512 Кб флэш-памяти, 192 Кб SRAM
- Хранилище – слот для микро SD-карты
- Сетевые возможности
- 1x 10 / 100M Fast Ethernet RJ45 порт
- Поддержка модулей Xbee для беспроводной связи (WiFi, Bluetooth, ZigBee, DigiMesh, 802.15.4 и так далее)
- Входы / выходы
- 2x последовательных порта RJ45 для устройств SPI или UART (5 В выход)
- 3-контактные клеммные колодки с программно настраиваемыми входами / выходами, питанием и заземлением
- Цифровые выходы можно управлять резистивными или индуктивными нагрузками мощностью до 9 Вт, такими как контакторы, пневматические или жидкостные клапаны, защитные замки, тормоза, светодиодные лампы и так далее, без необходимости в реле
- 2x выхода H-bridge для DC двигателей, динамика и так далее…
- До 4 осей шаговых и / или серводвигателей (M разъем)
- Все точки ввода / вывода также доступны через разъем
- Программирование – USB 2. 0 device port
- Разное – светодиоды для состояния ввода-вывода и состояния для каждого терминала
- Питание
- 12-24 В DC через 3-контактнную клеммную колодку
- Защита от перегрузок (напряжения, тока и температуры), электростатического разряда, индуктивного обратного хода, обратной полярности питания и большинства ошибок подключения
- Размеры – 12.7 x 8.9 x 2.54 см (поликарбонат и алюминиевый корпус)
 0 device port
0 device portПример простой системы, управляемой через ClearCore
На приведенной выше схеме показана простая система с Ethernet, используемая для мониторинга и управления на одном или нескольких ПК (или SBC, например Raspberry Pi) в офисной сети, SPI дисплеем и сканером штрих-кода UART, подключенным через последовательный порт RJ45, а также различными датчиками и исполнительными механизмами, подключенными к терминалам ввода / вывода.
Возможны более сложные системы с добавлением до 64 дополнительных цифровых точек ввода / вывода путем последовательного подключения модулей расширения CCIO-8, а также можно подключать несколько контроллеров ClearCore для более крупных систем.
Более сложная система с несколькими системами ClearCore и SBC Raspberry Pi, подключенными к дисплею с высоким разрешением
Компания предоставляет библиотеку движения и ввода-вывода C++, которая не требует понимания сложных деталей процессора Cortex-M4, и обеспечивает “доступ к разнообразным аппаратным функциям ClearCore” через объекты для управления двигателем и его состоянием, конфигурации ввода / вывода, генерации звука динамика и многое другое. Исходный код доступен бесплатно по OEM лицензии, а также предоставляется 40 примеров проектов. Кроме того, для быстрого создания прототипов и демонстраций можно использовать оболочку Arduino компании вместе с библиотекой ClearCore.
Документация, схемы и исходный код доступны после регистрации учетной записи на веб-сайте компании.
В видео ниже представлен обзор возможностей ClearCore на примере робота-бармена.
Промышленные контроллеры ввода-вывода и движения ClearCore в настоящее время продаются по цене $99 за единицу, но можно получить скидку при заказе большее 200 единиц. Более подробную информацию вы найдете на странице продукта.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.
Gelid Codi6: обзор. Контроллер для ARGB-вентиляторов на базе Arduino — Страница 5 из 6
Процесс подключения и настройки
В комплекте к Gelid Codi6 отсутствует какая-либо техническая документация бумажного вида. Подробное руководство по подключению и первоначальной настройке компания разместила на официальной странице контроллера.
Сперва необходимо скачать драйвер Сh440 USB. Отмечу, что в моём случае по окончании установки выдавалась ошибка, но несмотря на её появление Codi6 в системе определился.
Далее в Диспетчере устройств Windows нужно в разделе “Порты (COM и LTP)” нужно найти устройство USB-SERIAL Ch440 и запомнить номер COM-порта. Вероятно, он будет там один.
Затем следует скачать и открыть программу Arduino IDE. В настройках утилиты можно выбрать русский язык. В разделе “Инструменты” нужно выбрать COM-порт, на котором «висит» Codi6.
Для Gelid Codi6 есть две наиболее подходящие библиотеки для работы с подсветкой – FastLED и AdafruitNeoPixel. Функционал одинаков, различия меж ними заключаются лишь немного в синтаксисе. Для установки, к примеру, FastLED, в окне Arduino IDE нажимаем “Скетч>>Подключить библиотеку>> Управление библиотеками” (или Ctrl+Shift+I). В окне поиска вводим FastLED, выбираем версию, жмём установка. Для программирования кнопки пригодится библиотека NewPing.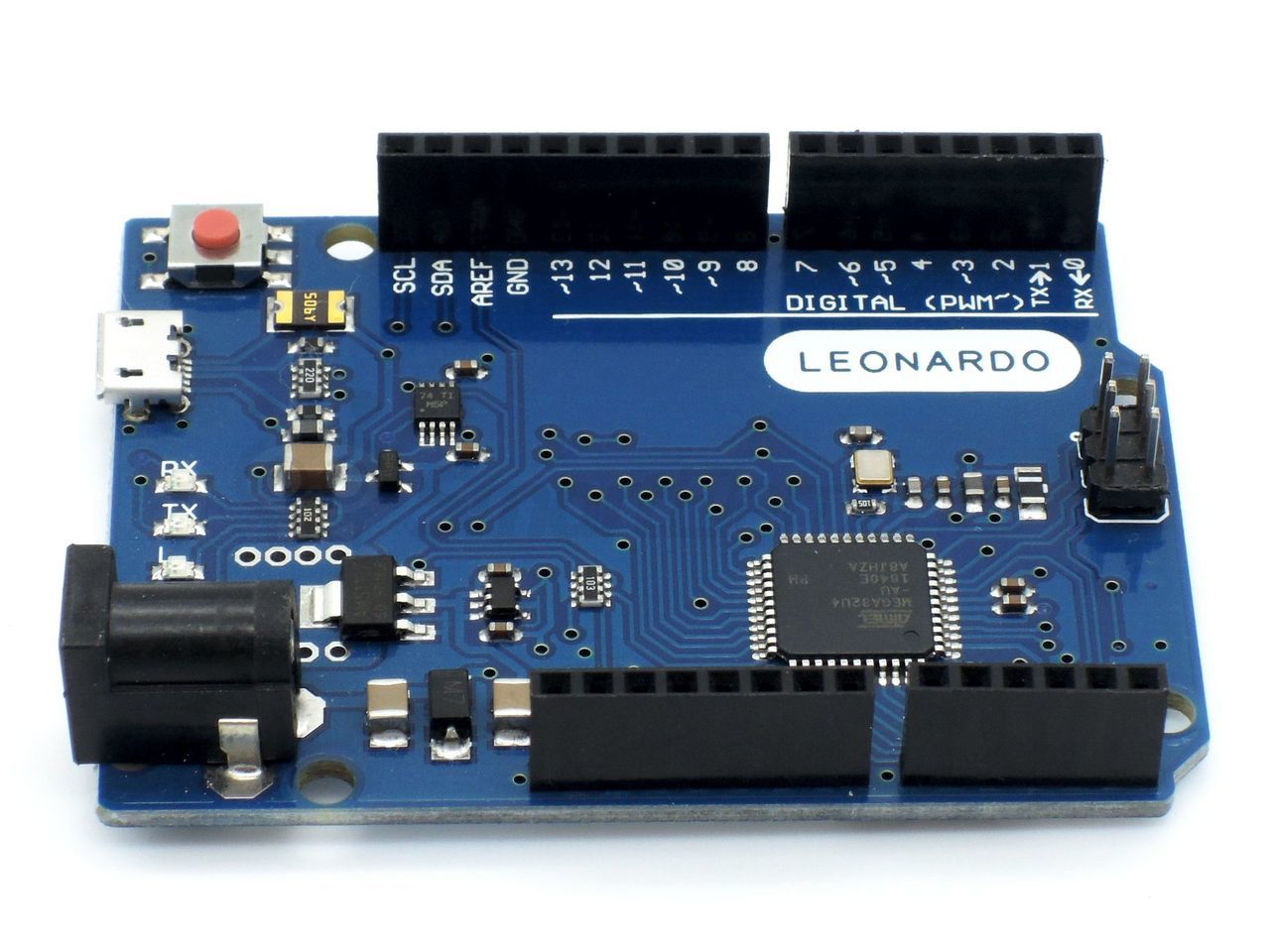
Готово! Вы великолепны! На данном этапе Gelid Codi6 полностью подключен и готов к работе. На странице контроллера Gelid разместила несколько примеров кода для различных режимов работы подсветки и не только.
Для их загрузки необходимо открыть код приглянувшегося эффекта/функции, скопировать его в окно программы Arduino IDE и запустить. На компиляцию и выгрузку уйдет порядка 5 секунд. Естественно, Gelid-овские шаблоны можно поправить на своё усмотрение.
Gelid Codi6 обеспечивает огромный простор. Сильно постаравшись, его можно «подружить» с утилитой HWinfo, и, к примеру, изменением цвета подсветки отслеживать температуру/загрузку процессора или видеокарты. Это можно реализовать даже на одном вентиляторе. При низкой нагрузке светится один диод, а при полной все девять диодов вентиляторов. Всё ограничивается лишь фантазией, а язык C++, на котором работает компилятор Arduino IDE, даёт безграничные возможности.
Страницы: 1 2 3 4 5 6 Все страницы
Программное обеспечение | Arduino
Arduino Web Editor
Начните кодирование онлайн и сохраните свои эскизы в облаке. Самая последняя версия IDE включает все библиотеки, а также поддерживает новые платы Arduino.
КОД НАЧАЛО РАБОТЫ
Arduino IDE 1.8.13
Программное обеспечение Arduino с открытым исходным кодом (IDE) позволяет легко писать код и загружать его на плату. Это программное обеспечение можно использовать с любой платой Arduino.
Инструкции по установке см. На странице «Начало работы».
ИСХОДНЫЙ КОД
Активная разработка программного обеспечения Arduino ведется на GitHub. См. Инструкции по созданию кода. Архивы исходного кода последней версии доступны здесь. Архивы подписаны PGP, поэтому их можно проверить с помощью этого ключа gpg.
Экспериментальное программное обеспечение
Arduino IDE 2.0 beta (2.0.0-beta.4)
Новая основная версия Arduino IDE стала быстрее и мощнее! В дополнение к более современному редактору и более отзывчивому интерфейсу он имеет автозаполнение, навигацию по коду и даже живой отладчик.
Примечание. Это программное обеспечение все еще находится в статусе beta , что означает, что оно почти завершено, но могут возникнуть незначительные проблемы. Помогите нам протестировать его и поделитесь своим мнением на форуме!
Вы также можете найти дополнительную информацию о выпуске здесь.
ИСХОДНЫЙ КОД
Arduino IDE 2.0 имеет открытый исходный код, и ее исходный код размещен на GitHub.
Другие загрузки
ARDUINO YÚN LINUX OS
OpenWRT — Yún 1.5.3 Обновление образа
Загрузите последнюю стабильную ОС GNU / Linux для вашего Yún.Это делает ваш Yún более стабильным и многофункциональным.
Простая процедура установки (рекомендуется)
Следуйте инструкциям руководства Yún sysupgrade.
Расширенная процедура установки
Эта процедура рекомендуется только опытным пользователям, которые хотят полностью перепрограммировать Yún, включая его загрузчик U-Boot. Эти инструкции по перепрошивке базовых образов предназначены только для справки. Следование им приведет к аннулированию гарантии Yún.
Условия использования
Загружая программное обеспечение с этой страницы, вы соглашаетесь с указанными условиями.
Программное обеспечение Arduino предоставляется вам «как есть», и мы не даем никаких явных или подразумеваемых гарантий в отношении его функциональности, работоспособности или использования, включая, помимо прочего, любые подразумеваемые гарантии товарного состояния, пригодности для конкретной цель или нарушение. Мы прямо отказываемся от какой-либо ответственности за любые прямые, косвенные, побочные, случайные или особые убытки, включая, помимо прочего, упущенную выгоду, упущенную прибыль, убытки, возникшие в результате прерывания бизнеса или потери данных, независимо от формы иска или правовой теории в соответствии с ответственность за которые может быть возложена, даже если было сообщено о возможности или вероятности такого ущерба.
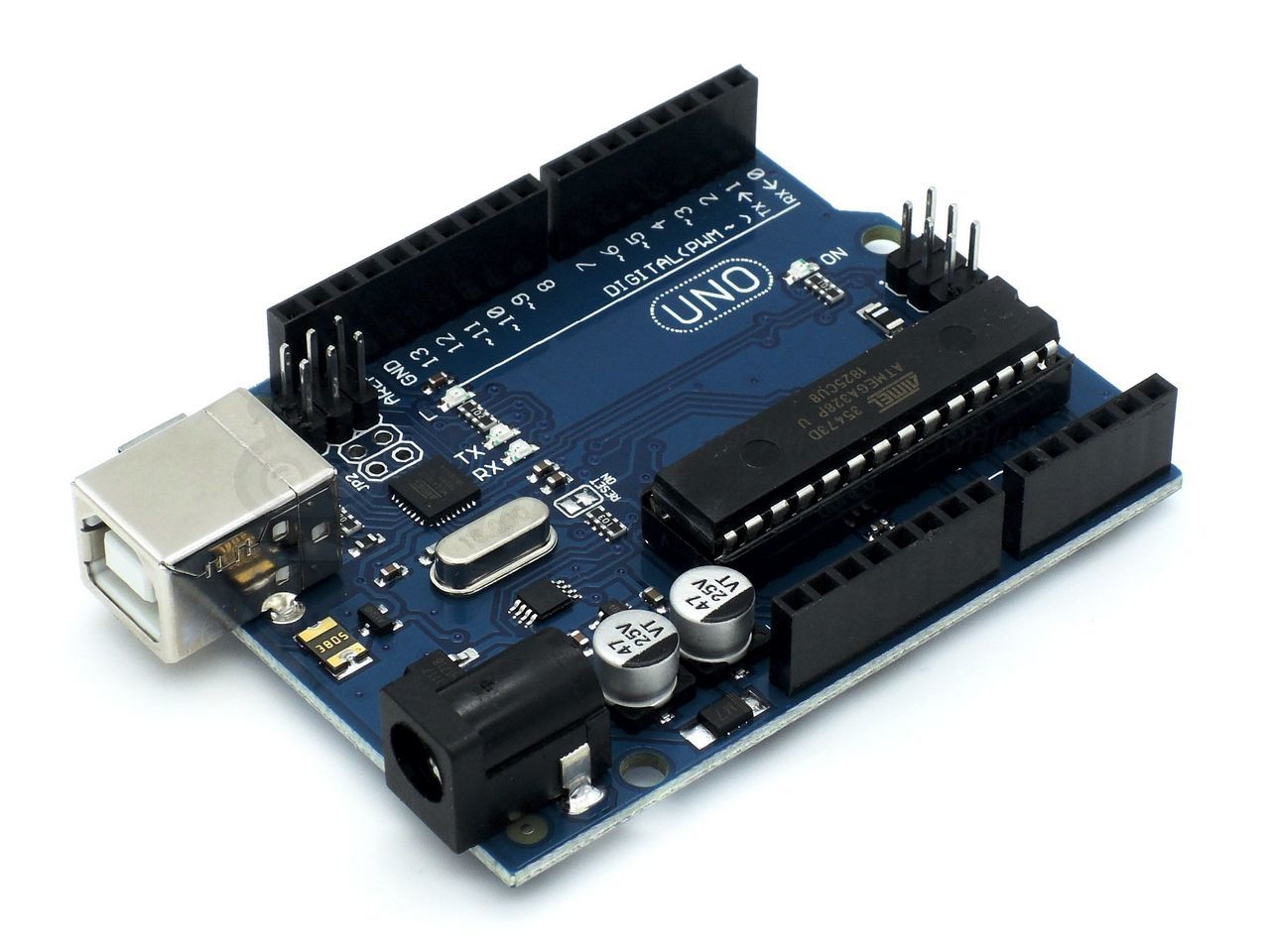
Arduino Uno Rev3 | Официальный магазин Arduino
Программирование
Arduino Uno можно программировать с помощью (программного обеспечения Arduino (IDE)). Выберите «Arduino Uno» в меню «Инструменты»> «Плата» (в соответствии с микроконтроллером на вашей плате). Подробнее см. В справочнике и руководствах.
ATmega328 на Arduino Uno поставляется с предварительно запрограммированным загрузчиком, который позволяет загружать в него новый код без использования внешнего аппаратного программатора. Он взаимодействует с использованием оригинального протокола STK500 (ссылка, файлы заголовков C).
Вы также можете обойти загрузчик и запрограммировать микроконтроллер через заголовок ICSP (внутрисхемное последовательное программирование), используя Arduino ISP или аналогичный; подробности см. в этих инструкциях.
Исходный код прошивки ATmega16U2 (или 8U2 на платах rev1 и rev2) доступен в репозитории Arduino. В ATmega16U2 / 8U2 загружен загрузчик DFU, который можно активировать с помощью:
- На платах Rev1: подсоедините паяльную перемычку на задней стороне платы (рядом с картой Италии), а затем снова установите 8U2.
- На платах Rev2 или новее: есть резистор, который соединяет линию 8U2 / 16U2 HWB с землей, что упрощает перевод в режим DFU.
Затем вы можете использовать программное обеспечение Atmel FLIP (Windows) или программатор DFU (Mac OS X и Linux) для загрузки новой прошивки. Или вы можете использовать заголовок ISP с внешним программатором (перезаписав загрузчик DFU). См. Этот пользовательский учебник для получения дополнительной информации.
Предупреждения
Arduino Uno имеет сбрасываемый предохранитель, который защищает USB-порты вашего компьютера от короткого замыкания и перегрузки по току.Хотя большинство компьютеров имеют собственную внутреннюю защиту, предохранитель обеспечивает дополнительный уровень защиты. Если на порт USB подается ток более 500 мА, предохранитель автоматически разрывает соединение, пока не будет устранено короткое замыкание или перегрузка.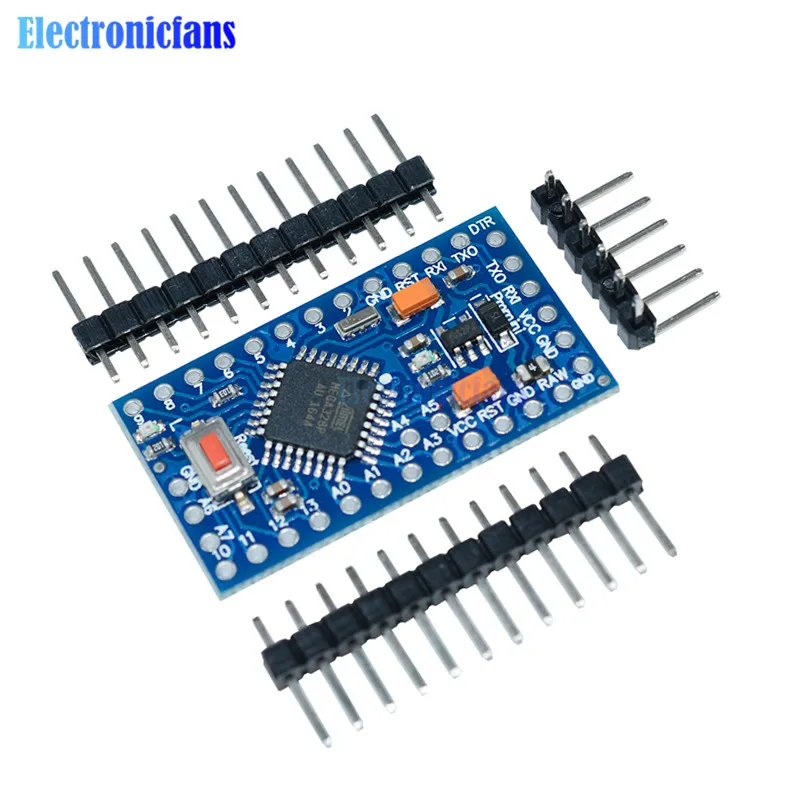
Отличия от других плат
Uno отличается от всех предыдущих плат тем, что не использует микросхему драйвера FTDI USB-to-serial. Вместо этого он оснащен Atmega16U2 (Atmega8U2 до версии R2), запрограммированным как преобразователь USB-to-serial.
Мощность
Плата Arduino Uno может получать питание через USB-соединение или от внешнего источника питания. Источник питания выбирается автоматически.
Внешнее (не USB) питание может поступать либо от адаптера переменного тока в постоянный (бородавка), либо от батареи. Адаптер можно подключить, вставив центрально-положительный штекер 2,1 мм в разъем питания на плате. Выводы от аккумулятора можно вставить в контактные разъемы GND и Vin разъема POWER.
Плата может работать от внешнего источника питания от 6 до 20 вольт.Однако при подаче напряжения менее 7 В на вывод 5 В может подаваться менее пяти вольт, и плата может работать нестабильно. При использовании более 12 В регулятор напряжения может перегреться и повредить плату. Рекомендуемый диапазон от 7 до 12 вольт.
Выводы питания следующие:
- Вин. Входное напряжение на плату Arduino при использовании внешнего источника питания (в отличие от 5 вольт от USB-соединения или другого регулируемого источника питания). Вы можете подавать напряжение через этот контакт или, если подаете напряжение через разъем питания, получить доступ к нему через этот контакт.
- 5V. Этот вывод выводит стабилизированное напряжение 5V от регулятора на плате. Плата может получать питание либо от разъема питания постоянного тока (7 — 12 В), разъема USB (5 В) или от контакта VIN платы (7 — 12 В). Подача напряжения через контакты 5 В или 3,3 В обходит регулятор и может повредить вашу плату. Мы этого не советуем.
- 3В3. Питание 3,3 В, генерируемое бортовым регулятором. Максимальный потребляемый ток составляет 50 мА.
- GND. Контакты заземления.
- IOREF. Этот штырь на плате Arduino обеспечивает источник опорного напряжения, с которой микроконтроллер работает. Правильно настроенный экран может считывать напряжение на выводе IOREF и выбирать соответствующий источник питания или разрешать трансляторам напряжения на выходах работать с 5 В или 3,3 В.
 Правильно настроенный экран может считывать напряжение на выводе IOREF и выбирать соответствующий источник питания или разрешать трансляторам напряжения на выходах работать с 5 В или 3,3 В.
Правильно настроенный экран может считывать напряжение на выводе IOREF и выбирать соответствующий источник питания или разрешать трансляторам напряжения на выходах работать с 5 В или 3,3 В.Память
ATmega328 имеет 32 КБ (0,5 КБ занято загрузчиком). Он также имеет 2 КБ SRAM и 1 КБ EEPROM (которые можно читать и записывать с помощью библиотеки EEPROM).
Вход и выход
См. Отображение между выводами Arduino и портами ATmega328P. Отображение для Atmega8, 168 и 328 идентично.
КОНТАКТЫ ATmega328P
Каждый из 14 цифровых контактов Uno может использоваться как вход или выход, используя функции pinMode (), digitalWrite () и digitalRead (). Они работают на 5 вольт. Каждый вывод может обеспечивать или принимать 20 мА в соответствии с рекомендуемыми рабочими условиями и имеет внутренний подтягивающий резистор (отключен по умолчанию) на 20-50 кОм. Максимальное значение 40 мА — это значение, которое нельзя превышать на любом выводе ввода / вывода, чтобы избежать необратимого повреждения микроконтроллера.
Кроме того, некоторые контакты имеют специализированные функции:
- Последовательный: 0 (RX) и 1 (TX).Используется для приема (RX) и передачи (TX) последовательных данных TTL. Эти контакты подключаются к соответствующим контактам микросхемы ATmega8U2 USB-to-TTL Serial.
- Внешние прерывания: 2 и 3. Эти выводы могут быть настроены на запуск прерывания при низком значении, нарастающем или спадающем фронте или изменении значения. Подробнее см. Функцию attachInterrupt ().
- PWM: 3, 5, 6, 9, 10 и 11. Обеспечьте 8-битный вывод PWM с помощью функции analogWrite ().
- SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK).Эти контакты поддерживают связь SPI с использованием библиотеки SPI.
- : 13. Имеется встроенный светодиод, управляемый цифровым контактом 13. Когда на контакте установлено ВЫСОКОЕ значение, светодиод горит, когда на контакте низкий уровень, он выключен.
- TWI: контакт A4 или SDA и контакт A5 или SCL. Поддержите связь TWI с помощью библиотеки Wire.
Светодиод

Uno имеет 6 аналоговых входов, обозначенных от A0 до A5, каждый из которых обеспечивает разрешение 10 бит (т.е. 1024 различных значения). По умолчанию они измеряют напряжение от земли до 5 вольт, хотя можно изменить верхний предел их диапазона с помощью вывода AREF и функции analogReference ().На плате есть еще пара контактов:
- AREF. Опорное напряжение для аналоговых входов. Используется с analogReference ().
- Сброс. Установите в этой строке НИЗКИЙ уровень, чтобы сбросить микроконтроллер. Обычно используется для добавления кнопки сброса к щитам, которые блокируют кнопку на плате.
Связь
Arduino Uno имеет ряд средств для связи с компьютером, другой платой Arduino или другими микроконтроллерами. ATmega328 обеспечивает последовательную связь UART TTL (5 В), которая доступна на цифровых выводах 0 (RX) и 1 (TX).ATmega16U2 на плате передает эту последовательную связь через USB и отображается как виртуальный COM-порт для программного обеспечения на компьютере. В прошивке 16U2 используются стандартные драйверы USB COM, и внешний драйвер не требуется. Однако в Windows требуется файл .inf. Программное обеспечение Arduino (IDE) включает последовательный монитор, который позволяет отправлять простые текстовые данные на плату и с нее. Светодиоды RX и TX на плате будут мигать, когда данные передаются через микросхему USB-to-serial и USB-соединение с компьютером (но не для последовательной связи на контактах 0 и 1).
Библиотека SoftwareSerial обеспечивает последовательную связь на любом из цифровых выводов Uno.
ATmega328 также поддерживает связь I2C (TWI) и SPI. Программное обеспечение Arduino (IDE) включает библиотеку Wire для упрощения использования шины I2C; подробности см. в документации. Для связи по SPI используйте библиотеку SPI.
Автоматический (программный) сброс
Вместо того, чтобы требовать физического нажатия кнопки сброса перед загрузкой, плата Arduino Uno спроектирована таким образом, чтобы ее можно было сбросить с помощью программного обеспечения, запущенного на подключенном компьютере.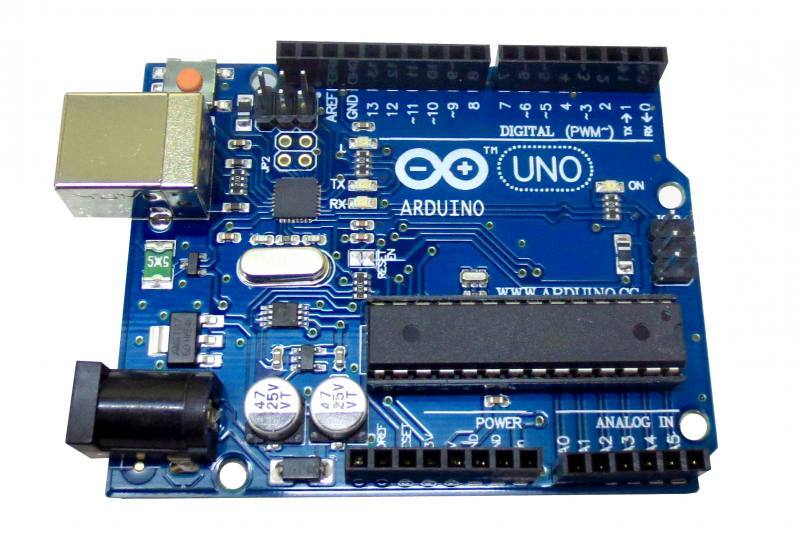 Одна из линий аппаратного управления потоком (DTR) ATmega8U2 / 16U2 подключена к линии сброса ATmega328 через конденсатор емкостью 100 нанофарад. Когда эта линия утверждается (принимает низкий уровень), линия сброса опускается достаточно долго, чтобы сбросить микросхему. Программное обеспечение Arduino (IDE) использует эту возможность, чтобы вы могли загружать код, просто нажимая кнопку загрузки на панели инструментов интерфейса. Это означает, что у загрузчика может быть более короткий тайм-аут, так как снижение DTR может быть хорошо скоординировано с началом загрузки.
Одна из линий аппаратного управления потоком (DTR) ATmega8U2 / 16U2 подключена к линии сброса ATmega328 через конденсатор емкостью 100 нанофарад. Когда эта линия утверждается (принимает низкий уровень), линия сброса опускается достаточно долго, чтобы сбросить микросхему. Программное обеспечение Arduino (IDE) использует эту возможность, чтобы вы могли загружать код, просто нажимая кнопку загрузки на панели инструментов интерфейса. Это означает, что у загрузчика может быть более короткий тайм-аут, так как снижение DTR может быть хорошо скоординировано с началом загрузки.
Эта установка имеет другие значения. Когда Uno подключен к компьютеру под управлением Mac OS X или Linux, он сбрасывается каждый раз, когда к нему подключается программное обеспечение (через USB). Следующие полсекунды загрузчик работает на Uno. Хотя он запрограммирован на игнорирование искаженных данных (то есть чего-либо, кроме загрузки нового кода), он будет перехватывать первые несколько байтов данных, отправленных на плату после открытия соединения. Если скетч, запущенный на плате, получает однократную конфигурацию или другие данные при первом запуске, убедитесь, что программное обеспечение, с которым он взаимодействует, ждет секунду после открытия соединения и перед отправкой этих данных.
Плата Uno содержит дорожку, которую можно обрезать, чтобы отключить автосброс. Контактные площадки по обе стороны от дорожки можно спаять вместе, чтобы снова включить ее. Он помечен как «RESET-EN». Вы также можете отключить автоматический сброс, подключив резистор 110 Ом от 5 В к линии сброса; подробности см. в этой ветке форума.
Редакции
Плата
Revision 3 имеет следующие новые функции:
Распиновка
- 1.0: добавлены выводы SDA и SCL, которые находятся рядом с выводом AREF, и два других новых вывода, размещенных рядом с выводом RESET, IOREF, которые позволяют экранам адаптироваться к напряжению, подаваемому с платы.В будущем экраны будут совместимы как с платой, использующей AVR, которая работает с напряжением 5 В, так и с Arduino Due, которая работает с напряжением 3,3 В. Второй вывод — неподключенный, он зарезервирован для использования в будущем.
- Более сильная цепь сброса.
- Atmega 16U2 заменяет 8U2.
 Второй вывод — неподключенный, он зарезервирован для использования в будущем.
Второй вывод — неподключенный, он зарезервирован для использования в будущем.Контроллер видеоигр Arduino для любого компьютера
Контроллер видеоигры, который может управлять любой компьютерной игрой!
Демонстрация лишь некоторых элементов управления на этом контроллере
Pro micro — это плата, запрограммированная на Arduino IDE, которая может работать как USB-клавиатура или мышь.Я воспользовался этой функцией, чтобы создать контроллер видеоигры. Каждая кнопка запускает нажатие клавиши на клавиатуре или прокрутки мыши. Джойстик контролирует положение вашей мыши. Комбинация этих двух функций дает вам полный контроль над своими играми.
ОборудованиеКнопка: https://www.sparkfun.com/products/97
Джойстик: https://www.sparkfun.com/products/9032
Pro micro: https://www.sparkfun.com / products / 12640
Специальная плата: https://easyeda.com/gadhaguy13/videogamecontroller (см. предупреждения ниже)
Программное обеспечениеPro micro программируется с помощью Arduino-IDE.Я поставил эти функции, потому что каждый контроллер будет другим.
Клавиатура
Импорт библиотеки клавиатуры
#include "Keyboard.h"
Начало клавиатуры:
Keyboard.begin ()
Нажмите клавишу:
Keyboard.press ('key')
Отпустите клавишу:
Keyboard.release ()
Мышь
Импортируйте библиотеку мыши:
#include "Mouse.час"
Запуск мыши:
Mouse.begin ()
Щелкните:
Mouse.click ()
Перемещение мыши или прокрутки:
Mouse.move (x, y, scroll)
PCB Я разработал печатную плату с помощью EasyEDA, и ее изготовили в JLCPCB. Это ссылка на дизайн печатной платы. Перед заказом проверьте, нет ли ошибок! После заказа я сделал несколько непроверенных мелких настроек. Кроме того, убедитесь, что он соответствует pro micro, так как ссылка на печатную плату, которую я дал, предназначена для arduino nano , который несовместим с библиотеками клавиатуры и мыши.Вы можете добавить кнопки или изменить раскладку по своему вкусу.
Это ссылка на дизайн печатной платы. Перед заказом проверьте, нет ли ошибок! После заказа я сделал несколько непроверенных мелких настроек. Кроме того, убедитесь, что он соответствует pro micro, так как ссылка на печатную плату, которую я дал, предназначена для arduino nano , который несовместим с библиотеками клавиатуры и мыши.Вы можете добавить кнопки или изменить раскладку по своему вкусу.
слоев
Эта печатная плата состоит из двух слоев. Слои делают так, чтобы два провода могли проходить друг над другом без короткого замыкания.
Переходные отверстия
Переходные отверстия соединяют слои печатной платы друг с другом. Например, если вы хотите, чтобы провод из верхнего слоя соединялся с проводом из нижнего слоя, добавьте переходное отверстие.
Ratlines и Провода
Ratlines — это как ориентир для размещения проводов.Они следуют схеме. Вы можете сделать печатную плату без использования схемы или ratlines, но я рекомендую их. На мой взгляд, они упрощают электромонтаж. При подключении убедитесь, что ваши провода не образуют угол 90 °.
Не забудьте заменить слот Arduino nano на печатной плате для того, какой Arduino вы используете!
Как собрать дрон с квадрокоптером Arduino: пошаговый проект DIY
Как партнер Amazon я зарабатываю на соответствующих покупках.
Если вам нравится идея создать свой собственный квадрокоптер, но вы не знаете, как и с чего начать, вы определенно находитесь на правильной странице.Мы знаем, насколько трудным и разочаровывающим может быть исследование, поэтому мы решили сделать руководство по созданию собственного квадрокоптера с использованием платы Arduino. Мы надеемся, что она окажется для вас полезной.
И чтобы вы еще больше воодушевились своим предстоящим проектом, вот квадрокоптер Arduino в действии:
 » src=»https://www.youtube.com/embed/_0TUCWGuIew?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
» src=»https://www.youtube.com/embed/_0TUCWGuIew?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Создание собственного квадрокоптера с нуля включает в себя много часов и тяжелую работу. Поэтому, если терпение не является вашей сильной стороной и если вы не обладаете необходимыми навыками программирования, вы можете выбрать комплект квадрокоптера, который содержит необходимые детали и поставляется с инструкцией.Этот проект на самом деле не предполагает серьезного строительства, а скорее представляет собой проект типа «собрать все части вместе, следуя инструкциям». Обычно это делается через час или два, и сразу после этого вы готовы взлететь в небо!
Однако с этими комплектами квадрокоптеров вы пропустите долгие часы и пот, потраченные на строительство, и на то, чтобы понять суть вашей птицы и то, как она тикает. Кроме того, вы упустите непреодолимое чувство удовлетворения, когда впервые взлетите с квадроциклом ручной работы.
Весь процесс создания квадроцикла — это то, что любят заядлые любители дронов. Вас просто зацепит чувство участия во всем процессе, от выбора деталей, проектирования схем до программирования платы полетного контроллера Arduino. Но здесь мы забегаем вперед, так что давайте начнем с самого начала.
Общее «Quad Science»
Как следует из названия, квадрокоптер — это летательный аппарат с четырьмя электродвигателями и четырьмя пропеллерами.По сравнению с другими радиоуправляемыми летательными аппаратами, квадроцикл, как и другие мультироторные двигатели, имеет наиболее устойчивую платформу, и все благодаря его разной конструкции, а также направлению и разнице между четырьмя создаваемыми им толчками. Благодаря этой стабильности квадроциклы идеально подходят для воздушного наблюдения и съемок. Они бывают всех форм и размеров. От самых маленьких, которые умещаются на ладони, до больших, способных поднимать серьезное съемочное оборудование и подвесы. Вы будете удивлены, узнав, какой вес могут нести большие дроны!
Вы будете удивлены, узнав, какой вес могут нести большие дроны!
Теперь, в отличие от традиционного вертолета, квадроцикл полагается на свои четыре винта для создания подъемной тяги за счет совместной работы.Каждый ротор поднимает около четверти общего веса, что позволяет нам использовать меньшие и менее дорогие двигатели. Вы в основном управляете движением квадроцикла, изменяя количество мощности, которое каждый двигатель передает своим винтам.
Двигатели расположены в каждом углу воображаемого квадрата. На одной диагонали у вас есть два двигателя, которые вращаются по часовой стрелке, а остальные два на противоположной диагонали вращаются против часовой стрелки. Если бы это было не так, квадрокоптер вращался бы, как традиционный вертолет, только тогда, когда умирает хвостовой винт.
Для поддержания баланса квадроцикл полагается на данные, которые он собирает от внутренних датчиков, и регулирует мощность, которую он отправляет на каждый двигатель, чтобы выровнять весь дрон. Чтобы все время поддерживать баланс, в квадроцикле используется продвинутая система управления, которая обычно выполняет настройки автономно, и именно здесь ваша плата Arduino и ваше программирование вступают в игру. Этот тип самостабилизации сделает ваш дрон вполне доступным для полета, так как вам не придется постоянно беспокоиться о потере контроля и повреждении квадроцикла.
Обычно каждый квадроцикл способен выполнять четыре типа движения: высота, крен, рыскание и тангаж. Каждое из этих движений контролируется силой тяги, создаваемой каждым ротором. Вот почему вам нужно будет запрограммировать пульт дистанционного управления, чтобы он знал, сколько мощности отдавать и на какой ротор ее отдавать.
Каждый квадрокоптер комплектуется платой микроконтроллера с датчиками на ней, в вашем случае — платой Arduino. Эта плата вместе с выбранными вами компонентами управляет двигателями.Вам решать, насколько самоконтролируемым вы хотите, чтобы ваш квадроцикл был. Вы можете использовать только базовые, такие как гироскоп, или кучу других, более продвинутых датчиков, таких как барометр, или GPS, или даже сонар, чтобы ваш квадроцикл мог обнаруживать и избегать препятствий, которые находятся в его пределах. путь.
Вы можете использовать только базовые, такие как гироскоп, или кучу других, более продвинутых датчиков, таких как барометр, или GPS, или даже сонар, чтобы ваш квадроцикл мог обнаруживать и избегать препятствий, которые находятся в его пределах. путь.
Квадроциклы
, как и все дроны, легко настраиваются, и вы действительно можете создать такой, который будет соответствовать вашим интересам. Это главная привлекательность процесса DIY для многих энтузиастов. Если вы интересуетесь фотографией, видео, гонками на дронах или просто летаете ради развлечения, вы обнаружите, что квадрокоптер может предложить что-то для вас.Беспилотные летательные аппараты легко адаптируются и настраиваются, и мы думаем, что вам понравится настраивать тот, который соответствует вашим предпочтениям.
Компоненты, необходимые для вашего Quad
Каждый квадроцикл должен включать в себя элементы, перечисленные ниже, чтобы летать. Вот краткое изложение каждой из различных частей квадрата, и мы рассмотрим их более подробно по ходу статьи:
- Рама — «костяк» квадрокоптера. Рама — это то, что удерживает вместе все части вертолета.Он должен быть прочным, но с другой стороны, он также должен быть легким, чтобы двигатели и батареи не изо всех сил удерживали его в воздухе.
- Двигатели — Тяга, которая позволяет квадрокоптеру взлетать в воздух, обеспечивается бесщеточными двигателями постоянного тока, каждый из которых отдельно управляется электронным регулятором скорости или ESC.
- ESCs — Электронный регулятор скорости похож на нерв, который передает информацию о движении от мозга (полетный контроллер) к мышцам рук или ног (моторам).Он регулирует мощность, которую получают двигатели, что определяет скорость и изменение направления квадроцикла.
- Пропеллеры — В зависимости от типа квадроцикла, который вы создаете, вы можете использовать винты от 9 до 10 или 11 дюймов (для стабильных полетов с аэрофотосъемкой) или 5-дюймовые гоночные винты для меньшей тяги, но большей скорости.
- Батарея — В зависимости от вашего максимального уровня напряжения вы можете выбрать батареи 2S, 3S, 4S или даже 5S. Но для стандартного квадроцикла, который планируется использовать для аэросъемки или фотосъемки (просто пример), вам понадобится 11.Аккумулятор 4 В 3S. Вы можете выбрать 22,8 В 4S, если вы строите гоночный квадроцикл и хотите, чтобы двигатели вращались намного быстрее.
- Плата Arduino — Выбор конкретной модели зависит от типа квадрокоптера, который вы хотите построить. Строите ли вы для аэрофотосъемки, гонок, фристайла или чего-то еще. О правильном выборе платы мы поговорим далее в статье.
- IMU — Доска, которая в основном (в зависимости от вашего выбора) представляет собой сумму различных датчиков, которые помогают вашему квадроциклу знать, где он находится и как его выровнять.
- RC Controller — Выбор передатчика зависит от выбора протокола, который вы собираетесь использовать, и от приемника сигнала, который установлен на дроне.
Это основные компоненты дрона. Читайте более подробное описание каждого компонента:
Деталь # 1 — Рама
Хотя может возникнуть соблазн купить предварительно собранный комплект рамы, сборка рамы самостоятельно может помочь вам начать настоящий процесс DIY. Рама вашего квадрокоптера должна обладать прочностью, но она также должна быть достаточно гибкой, чтобы компенсировать вибрации, производимые двигателями.В нем должны быть следующие детали:
- Центральная удерживающая пластина — для монтажа электроники.
- Руки — на четверке четыре руки.
- Кронштейны для двигателей — их нужно четыре, чтобы можно было подключить двигатели на каждом конце рычага.
Рама может быть сделана из алюминия, углеродного волокна или дерева, но в основном для дужек используется алюминий. Точнее, квадратные полые направляющие рычагов изготовлены из алюминия. Они относительно легкие, жесткие и дешевые. Но, поскольку они не известны как отличные компенсаторы колебаний двигателя, как углеродное волокно, они могут сбивать с толку датчики.
Они относительно легкие, жесткие и дешевые. Но, поскольку они не известны как отличные компенсаторы колебаний двигателя, как углеродное волокно, они могут сбивать с толку датчики.
Углеродное волокно гораздо лучше поглощает вибрации двигателя и является наиболее жестким. Но он же самый дорогой. Углеродное волокно — лучший выбор, но это во многом зависит от вашего личного бюджета.
Деревянные плиты также лучше поглощают вибрацию двигателя, но они довольно хрупкие и могут легко сломаться в случае аварии.Вы также можете выбрать предварительно изготовленную раму, которую нужно только собрать, и вы можете узнать больше о них в нашей статье о комплектах рамы.
Ознакомьтесь с нашими предложениями по лучшим готовым каркасам, которые вы можете использовать в качестве основы для своего проекта:
Деталь № 2 — Бесщеточные двигатели
Эти двигатели почти такие же, как и традиционные двигатели постоянного тока, но на их валу нет щетки, которая предназначена для изменения направления мощности, проходящей через катушки.При покупке этих моторов необходимо проверить их технические данные.
Самыми важными из них являются «Kv-рейтинг», который показывает количество оборотов в минуту, которое двигатель способен генерировать с определенным количеством электроэнергии.
Кроме того, вам потребуются двигатели, которые вращаются против часовой стрелки, чтобы противодействовать эффекту крутящего момента стоек. Чтобы лучше понять эту тему, рекомендуем ознакомиться с нашей статьей о двигателях дронов.
Для двигателей (или роторов), мы предлагаем следующие модели:
Деталь # 3 — Винты
Пропеллеры создают тягу, и каждому двигателю нужен один, чтобы квадрокоптер мог летать.Убедитесь, что вы покупаете подходящие вращающиеся пары гребных винтов для вращения по и против часовой стрелки. Их можно купить с различным шагом и диаметром.
Вы должны выбрать пропеллеры в соответствии с размером вашей рамы, и как только вы решите, какие пропеллеры вы будете использовать, только тогда вы сможете выбрать свои двигатели. Пропеллеры стандартизированы, и вот самые популярные для квадроциклов:
- 5 ступеней, 8 диаметров — малые квадроциклы
- 8 шаг, 9 диаметр — малые квадроциклы
- 5 ступеней, 10 диаметров — квадроциклы среднего размера
- Шаг 7, диаметр 10 — квадроциклы среднего размера
- 5 шагов, диаметр 12– Обеспечивают большое количество толчков и отлично подходят для квадроциклов большего размера.
Поскольку аэродинамика — это не просто сбивающая с толку и трудная для понимания, если вы не инженер по аэродинамике, мы объясним несколько важных терминов в нескольких словах.
Во-первых, чем больше диаметр и шаг, тем большую тягу будет производить винт. Потребуется больше мощности, но квадрокоптер сможет поднимать больший вес. Для двигателей с высокой частотой вращения вам потребуются гребные винты меньшего или среднего размера. Для двигателей с низкой частотой вращения вам понадобятся винты большего размера, чтобы они могли удерживать квадрокоптер в воздухе на более низкой скорости.
Во-вторых, чтобы достичь идеального баланса между двигателями и гребными винтами, вам сначала нужно решить, для чего вы будете использовать квадроцикл.Например, если вы хотите построить устойчивый и достаточно мощный квадроцикл для подъема съемочного и фотографического оборудования, вам следует использовать двигатель с меньшими оборотами и большим крутящим моментом, а также пропеллеры с более длинным или большим шагом.
Если вам нужны винты с хорошими характеристиками, мы рекомендуем вам приобрести любой из этих:
Деталь № 4 — ESC (
Электронный регулятор скорости )
Устройство, отвечающее за управление скоростью двигателей, представляет собой дешевую плату контроллера, используемую только для двигателей. Он имеет вход для аккумулятора и выход двигателя с тремя фазами, поэтому вам понадобится четыре из них для каждого двигателя.
Он имеет вход для аккумулятора и выход двигателя с тремя фазами, поэтому вам понадобится четыре из них для каждого двигателя.
При покупке правильного регулятора скорости нужно обращать внимание на максимальный уровень тока, исходящего от источника. Выберите контроллер на 10А или выше.
Кроме того, вам нужно проверить, насколько он программируемый, а это означает, что вам нужно купить ESC, который позволит вам изменить диапазон частот сигнала на желаемое значение.
Когда дело доходит до ESC (электронных регуляторов скорости) , w e предлагает эти отличные и стабильные модели:
Деталь # 5 — Аккумулятор
Наиболее рекомендуемый источник питания для квадрокоптера — LiPo.Он не тяжелый, и текущие уровни идеально подходят для того, что вам нужно. NiMH — более дешевый, но и более тяжелый вариант.
Батареи
LiPo поставляются как одна ячейка 3,7 В или упакованы вместе (до 10 элементов, обеспечивающих 37 В).
Самая популярная версия среди любителей дронов известна как батарея 3SP1, которая состоит из трех ячеек и обеспечивает напряжение 11,1 В.
Вот хороший: Zippy Flightmax 5000mAh 3S1P 20C
Деталь # 6 — IMU (инерциальный измерительный блок)
Это устройство отвечает за измерение ориентации, скорости и силы тяжести квадрокоптера.Это позволяет электронике управлять мощностью, подаваемой на двигатели, чтобы регулировать скорость двигателей. Устройство оснащено 3-осевым гироскопом и 3-осевым акселерометром. Эта комбинация известна как 6DOF IMU.
Вот хороший вариант для сборки квадроцикла: KNACRO 6508 IMU MPU6050 MPU-6050 6DOF
Гироскоп предназначен для считывания значений угловой скорости, а акселерометр отвечает за измерение ускорения и силы, что означает, что он может чувствовать силу тяжести, направленную вниз.Поскольку он оснащен трехосными датчиками, он может определять ориентацию квадроцикла.
Деталь № 7 — Контроллер полета
Вы можете выбрать плату контроллера, единственная цель которой — управлять квадрокоптером, или вы можете выбрать Arduino UNO. Это микроконтроллер общего назначения, который позволяет вам создать собственный полетный контроллер, купив детали, которые вы хотите установить, и собрав контроллер самостоятельно.
Это микроконтроллер общего назначения, который позволяет вам создать собственный полетный контроллер, купив детали, которые вы хотите установить, и собрав контроллер самостоятельно.
Если вы хотите начать работу с электроникой и кодированием, Arduino UNO — лучшая плата, которую вы можете использовать.Это самая надежная и прочная платформа, которая позволяет буквально играть с ней как угодно.
В комплект входит:
- 14 цифровых входов / выходов (6 из них могут использоваться как выходы для ШИМ)
- 6 аналоговых входов
- кварцевый кристалл 16 МГц
- Разъем USB
- разъем питания
- заголовок ICSP
- кнопка сброса
Вы можете использовать USB-кабель для подключения к компьютеру, батарее или адаптеру переменного / постоянного тока для включения.
Самое лучшее в этой доске то, что она позволяет вам возиться с ней и не беспокоиться о ее разрушении. Худшее, что вы можете с этим сделать, — это поджарить чип, который, к счастью, можно заменить всего за пару долларов.
Вы можете запрограммировать «UNO» с помощью программного обеспечения Arduino. Чтобы получить подробную информацию, которая поможет вам начать работу с полетным контроллером Arduino UNO, перейдите к последнему разделу сообщения.
Деталь # 8 — Радиоуправляемый передатчик
Самый распространенный способ программирования и управления квадрокоптером — это радиоуправляемый передатчик.Обычно вы можете выбрать один из двух режимов: акробатический или стабильный.
Для управления квадроциклом в акробатическом режиме гироскоп — единственный, который отправляет значения на обработку. В этом случае управляющие ручки предназначены только для управления и установки скорости вращения для трех осей, и если вы отпустите их, значения не будут повторно сбалансированы автоматически.
Пригодится тем, кто хочет выполнять воздушные трюки, потому что дрон можно немного наклонить, а после отпускания стиков квад сохраняет положение. Это не лучший режим для новичков, потому что управлять квадроциклом в этом режиме довольно сложно. По сути, чем больше у вас навыков в управлении дроном, тем меньше вам понадобится помощи в обеспечении стабильности.
Это не лучший режим для новичков, потому что управлять квадроциклом в этом режиме довольно сложно. По сути, чем больше у вас навыков в управлении дроном, тем меньше вам понадобится помощи в обеспечении стабильности.
Итак, когда вы начинающий пользователь дронов, используйте второй режим управления, потому что для определения ориентации дрона в этом режиме работает каждый датчик. Скорость мотора будет регулироваться автоматически, и дрон будет балансироваться самостоятельно.
В настоящее время доступны различные системы управления RC , такие как Futaba, Spektrum, Turnigy, FlySky и так далее.Вот несколько наших любимых:
Электромонтаж, пайка и программирование
Это самая сложная часть всего процесса строительства. Пайка — это очень специфическая техника, поэтому обязательно выполняйте этот процесс осторожно. Убедитесь, что вы точно знаете, что вам нужно делать, прежде чем начинать каждый шаг. Для этого вам понадобится:
Покупайте модуль Bluetooth только в том случае, если вы хотите иметь представление о параметрах и настраивать квадрокоптер через приложение, а не брать ноутбук с собой в поле во время тестирования.
Схема
Это основной план вашей операции:
Как подключить ESC:
- Сигнальный штифт ESC 1 — D3
- Сигнальный штифт ESC 3 — D9
- Сигнальный штифт ESC 2 — D10
- Сигнальный штифт ESC 4 — D11
Как подключить модуль Bluetooth:
Как подключить MPU-6050:
Как подключить светодиодный индикатор:
Как подключить приемник:
- Дроссель — 2
- Элероны — D4
- Элероны — D5
- Руль — D6
- AUX 1 — D7
Вам необходимо заземлить MPU-6050, модуль Bluetooth, приемник и ESC.И для этого вам необходимо подключить все контакты GND к контакту GND Arduino.
Как спаять все вместе
Вот порядок, в котором вы должны спаять все части вместе:
Первое, что вам нужно сделать, это взять женские разъемы и припаять их к макетной плате. Здесь будет размещаться ваша плата Arduino.
Припаяйте их прямо по центру, чтобы оставалось место для остальных разъемов для MPU, модуля Bluetooth, приемника и ESC, и оставьте место для некоторых дополнительных датчиков, которые вы, возможно, решите добавить в будущем.
Следующим шагом является пайка штыревых разъемов приемника и регуляторов прямо из гнездовых разъемов Arduino. Сколько у вас будет рядов заголовков мужских ESC, зависит от того, сколько двигателей будет у вашего дрона.
В нашем случае мы строим квадрокоптер, то есть будет 4 ротора и ESC для каждого. Это также означает, что будет 4 строки, каждая из которых будет иметь по 3 штекера.
Первый заголовок в первой строке будет использоваться для PID сигнала, второй для 5V (хотя это зависит от ваших ESC, имеющих вывод 5V или нет, в противном случае вы оставите эти заголовки пустыми), а третий Заголовок будет для GND.
По окончании пайки регуляторов скорости переходите к паяльной части разъемов приемника. В большинстве случаев у квадрокоптера 4 канала. Это газ, тангаж, рыскание и крен. Оставшийся свободный канал (пятый) используется для смены режима полета (вспомогательный канал). Это означает, что вам нужно будет припаять штекерные разъемы в 5 рядов. Все, кроме одной, будут иметь один заголовок, а только для одной из этих строк требуется 3 заголовка подряд.
Как подключать все провода
Ниже вы можете увидеть пример правильного подключения.Как вы можете видеть на картинке, то, о чем мы только что говорили, расположено слева (MPU припаян по центру) на плате, а слева (два женских разъема припаяны снизу) на плате — это то, как мы припаяли и подключили модуль Bluetooth. .
В нашем случае все земли были связаны с землями Arduino. Это включает в себя все заземления ESC, массу приемника (заголовок сигнала газа полностью справа), а также заземление модуля Bluetooth и MPU.
Это включает в себя все заземления ESC, массу приемника (заголовок сигнала газа полностью справа), а также заземление модуля Bluetooth и MPU.
Далее вам нужно следовать схемам и соединениям, которые мы объяснили выше.Например, MPU (SDA — A4 и SCL — A5) и для Bluetooth (TX — TX и RX — RX) Arduino.
После этого просто проследите за подключениями, как мы их написали: Сигнальные контакты ESC1, ESC2… к D3, D10… Arduino. Затем пины сигнала приемника Pitch — D2, Roll — D4… и так далее.
Кроме того, вам необходимо подключить длинный вывод светодиода (положительный вывод) к выводу Arduino D8, а также добавить резистор на 330 Ом между землей Arduino и коротким выводом светодиода (отрицательный вывод).
Последнее, что нужно сделать, это подключить источник питания 5 В. И для этого вам необходимо параллельно подключить черный провод (заземление аккумулятора) к земле всех ваших компонентов, а красный провод к Arduino, MPU и модулю Bluetooth, контакты 5 В.
Теперь MPU 6050 необходимо припаять к штекерным разъемам и к тем, которые вы планируете использовать. После этого поверните плату на 180 градусов и подключите все ваши компоненты к соответствующим разъемам на макетной плате.
Вот как это должно выглядеть, когда закончена пайка и проводка:
Включите его, и ваш Arduino готов к добавлению кодов через компьютер!
Как запрограммировать полетный контроллер Arduino
Полетный контроллер Arduino также требует некоторого компьютерного программирования для работы.Теперь, когда мы закончили сборку и пайку, мы можем перейти к аспекту кодирования. В этом разделе содержится пошаговое руководство о том, что вам нужно сделать, чтобы запустить полетный контроллер Arduino.
Во-первых, вам необходимо загрузить MultiWii 2.4. Тогда, когда вы его извлечете, вы получите это:
Войдите в папку MultiWii, найдите значок MultiWii и запустите его:
Используйте Arduino IDE, чтобы найти «файл Arduino» или файл Multiwii с расширением «. я нет». Любые «CPP-файл» или «H-файл» являются вспомогательными файлами для нашего кода Multiwii, поэтому не открывайте их. Просто используйте файл Multiwii.ino.
я нет». Любые «CPP-файл» или «H-файл» являются вспомогательными файлами для нашего кода Multiwii, поэтому не открывайте их. Просто используйте файл Multiwii.ino.
Когда вы открываете файл, вы найдете множество вкладок, таких как Alarms.cpp, Alarms.h, EEPROM.cpp, EEPROM.h и многие другие. Найдите «config.h»
Прокрутите вниз, пока не найдете «Тип мультикоптера», а затем, удалив «//», вы отметите это как определенное и работающее. Quad X, потому что мы предполагаем, что вы используете конфигурацию ротора «X» на вашем квадроцикле.
Теперь прокрутите вниз и найдите «Combined IMU Boards» и активируйте тип Gyro + Acc Board, который вы используете. В нашем случае мы использовали GY-521, поэтому мы активировали эту опцию.
Если вы решите добавить другие датчики, такие как барометр или ультразвуковой датчик, все, что вам нужно сделать, это «активировать» их здесь, и они будут работать.
Далее идет «Пин зуммера»:
Там нужно активировать опции индикатора полета (первые 3):
Теперь вам нужно прошить код на Arduino.
Отключите плату Arduino от полетного контроллера, а затем подключите ее к компьютеру через USB. Выйдя из FC и подключившись к компьютеру, вы найдете TOOLS и выберите тип своей платы Arduino (в нашем случае Arduino Nano).
Теперь найдите «Последовательный порт» и активируйте COM-порт, к которому подключен Arduino Nano (в нашем случае — COM3).
Наконец, щелкните стрелку и загрузите код и дождитесь передачи кода.
Когда загрузка завершена, отсоедините Arduino от USB, вставьте его обратно на свое место в плате FC и подключите батарею 5 В, чтобы весь FC был запитан, а затем подождите, пока светодиод на Arduino не загорится красным. Это означает, что загрузка завершена, и вы можете снова подключить его к компьютеру.
Теперь найдите папку Multiwii 2.4, затем MultiwiiConfig и найдите папку, совместимую с вашей ОС. В нашем случае это «application.windows64».
В нашем случае это «application.windows64».
Теперь запустите приложение MultiwiiConf:
Когда откроется пользовательский интерфейс, вам нужно выбрать COM-порт Arduino и нажать «Пуск», как показано на изображении ниже.
И все! Вы сразу заметите, как вы перемещаете FC, значения для данных акселерометра и гироскопа отображаются на экране. Ориентация вашего FC показана внизу.
В этом интерфейсе вы можете изменить значения PID и точно настроить свой квадроцикл в соответствии с вашими личными предпочтениями.Вы также можете назначить режимы полета определенным положениям вспомогательного переключателя в этом интерфейсе.
Все, что вам нужно сделать, это найти место для вашего Arduino FC на раме, и он готов взлететь в небо.
Заключение
Самостоятельная сборка дрона может оказаться сложным и трудным процессом. Тем не менее, он также гарантированно будет сопровождаться собственными наборами наград и удовольствий. Очень легко пойти в магазин и купить готовый к полету дрон, но люди, которые создают дроны с нуля, не делают этого по этой причине.Это ощущение, которое вы испытываете в первый раз, когда запускаете дрон, полностью созданный вами. На этих летательных аппаратах довольно весело летать, но есть шанс, что вы получите еще больше удовольствия еще до того, как полет начнется!
Мы надеемся, что эта статья помогла вам и дала вам лучшее представление о том, что делает каждая часть квадрокоптера. Теперь вы должны знать, как правильно выбрать запчасти для квадрокоптера. Если вам удалось собрать свой собственный квадрокоптер и все идет хорошо, вы можете прочитать другую нашу статью о том, как управлять квадрокоптером, чтобы получить больше советов.
Кроме того, вот серия видео, в которой показано, как собрать все части вместе и построить квадрокоптер Arduino с нуля. Если вы визуально обучаетесь, это должно быть хорошим дополнением к этой статье, на которое вы можете ссылаться, если когда-нибудь застрянете на каком-либо этапе сборки квадрокоптера:
 youtube.com/embed/2pHdO8m6T7c» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/2pHdO8m6T7c» frameborder=»0″ allowfullscreen=»»/>
YMFC-3D Часть 1 — Аппаратное обеспечение
YMFC-3D Часть 2 — Подключение передатчика и приемника RC
YMFC-3D Часть 3 — Как подключить гироскоп
YMFC-3D Часть 4 — Электронный регулятор скорости (ESC)
YMFC-3D Часть 5 — ПИД-регулятор квадрокоптера и настройка ПИД-регулирования
YMFC-3D Часть 6 — Контроллер полета с исходным кодом
Не стесняйтесь оставлять комментарии или отзывы об этом посте.Счастливого строительства!
Amazon и логотип Amazon являются товарными знаками Amazon.com, Inc или ее дочерних компаний.
Создание MIDI-контроллера с Arduino
Всем привет! В этой статье я научу вас, как создать свой собственный MIDI-контроллер с питанием от Arduino. MIDI расшифровывается как цифровой интерфейс музыкальных инструментов, и это протокол, который позволяет компьютерам, музыкальным инструментам и другому оборудованию обмениваться данными. Если вы будете следовать каждому шагу этого урока, вы сможете создавать музыку с помощью Arduino!
MIDI расшифровывается как цифровой интерфейс музыкальных инструментов, и это протокол, который позволяет компьютерам, музыкальным инструментам и другому оборудованию обмениваться данными. Если вы будете следовать каждому шагу этого урока, вы сможете создавать музыку с помощью Arduino!
Что вы узнаете из этой статьи:
- Выберите правильные компоненты для этого проекта.
- Нарисуйте интерфейс с нужными размерами и постройте его.
- Прочтите электрическую схему и подключите / припаяйте каждый компонент к Arduino.
- Выберите подходящее программное обеспечение для подключения MIDI-контроллера к DAW, которую вы используете.
- Отображение MIDI-контроллера.
Обязательно посмотрите видео, потому что оно более наглядное. Подпишитесь на мой канал Youtube, чтобы не пропустить новый проект и помочь мне расти!
Шаг 1: соберите весь материал
Вот список материалов и инструментов, которые нам понадобятся для выполнения этого проекта:
1 x Arduino Uno Starter Kit
12 x аркадных кнопок
4 потенциометра с ручкой потенциометра
2 x сдвижных потенциометра
Материал для сборки корпус (я решил сделать деревянный корпус)
Я выбрал стартовый комплект Arduino, потому что в этом комплекте есть много полезного материала для этого проекта, такого как резисторы, вся проводка и разъемы.Кроме того, если вы такой же новичок, как я, другие материалы из этого набора могут помочь вам начать работу с электроникой
Я купил кнопки аркады по ссылке выше, но если бы я купил снова, я бы купил ЭТИ КНОПКИ, потому что я хотел придать узор интерфейса, а с одноцветными кнопками это было невозможно, поэтому пришлось их раскрасить.
Необходимые инструменты:
- Напильник для хобби
- Наждачная бумага
- Отвертка
- Нож X-acto
- Штангенциркуль
- Линейка
- Насадки по дереву
- Лопата
- Перемычки
- Изоляционная лента
- Лак
- Краска
- Инструмент для зачистки проводов
- Кусачки
- Пила
- Электродрель
- Мини-топорная пила
- Dremel
- Супер клей
- Паяльник
- Припой
- Паяльная паста
Вы можете проверить изображения Больше подробностей.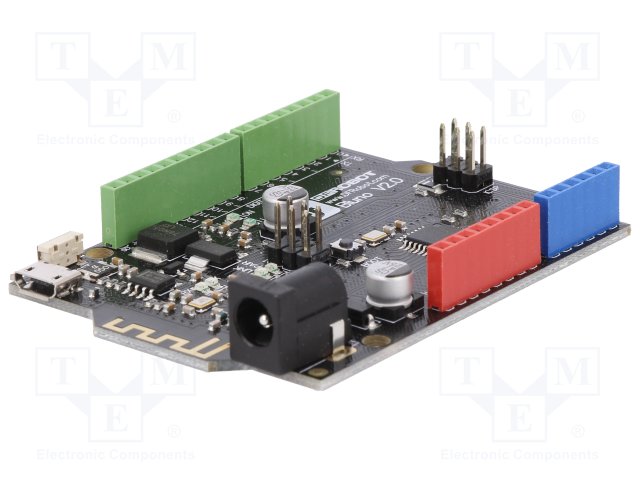
Шаг 2: набросок и построение интерфейса
Я настоятельно рекомендую набросать ваш интерфейс, чтобы вы были уверены в размерах, необходимых для сборки корпуса.
Я спроецировал свой интерфейс на лист формата А4, используя карандаш, линейку и циркуль. Результат вы можете увидеть на картинке ниже. Набросав интерфейс, вы узнаете размеры, необходимые для установки всех компонентов. Мои кнопки имеют диаметр 29,7 мм, поэтому я собираюсь просверлить отверстие диаметром 30 мм, чтобы установить его.Расстояние между отверстиями составляет 10 мм. Обычно центр каждого круга находится на расстоянии 40 мм (диаметр = 30 + пробел = 10).
Ручки для горшков имеют диаметр 10 мм. Рекомендуется сверлить сверлами увеличивающегося диаметра, чтобы не повредить дерево. Я также оставил 10-миллиметровое расстояние между кнопками и потенциометрами с ручкой.
И, наконец, скользящие потенциометры. Из техпаспорта я знаю, что расстояние между ними составляет около 80 мм. Вы должны использовать Dremel, чтобы открыть прорези для установки скользящих потенциометров, a.к.а. ФЕЙДЕРЫ. Если у вас нет этого специального инструмента, вы всегда можете сделать это, как я показываю на видео. Представьте себе прорезь длиной 80 мм и шириной 3 мм.
Это был мой проект по карантину COVID-19. Я был полон решимости найти продуктивный способ провести время, и мне на ум пришла оставшаяся в ящике Arduino. Я пошел в свой местный магазин, чтобы купить дрова, чтобы сделать ограждение, и когда я его купил, мне сказали, что они не рубят дрова из-за нехватки персонала и из-за всей этой самоизоляции / изоляции.Итак, я решил купить древесину и распилить ее дома из имеющегося у меня материала.
После удаления осколков наждачной бумагой и подготовки поверхности нанесла лак. Были нанесены два покрытия. После я выбрал цвет для покраски корпуса. Вы можете посмотреть фотографии, чтобы увидеть результат!
Шаг 3. Принципиальная электрическая схема и подключения
Я решил проиллюстрировать принципиальную схему вместо того, чтобы рисовать обычную принципиальную схему, потому что это может сильно запутать.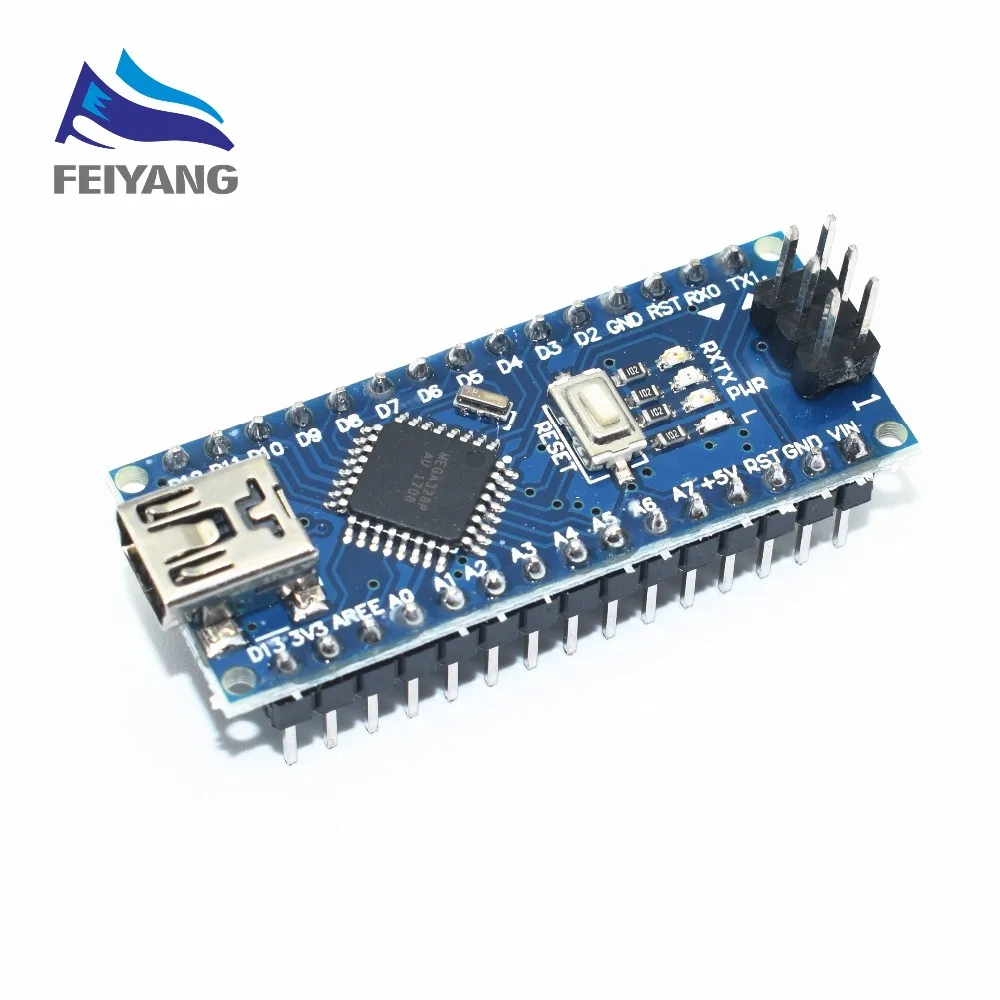 Я использовал несколько цветов для разделения перемычек, чтобы вы могли понять, где каждый провод.
Я использовал несколько цветов для разделения перемычек, чтобы вы могли понять, где каждый провод.
Микросхема, используемая в Arduino, содержит внутренние подтягивающие резисторы, поэтому нет необходимости подключать резисторы для каждой из кнопок аркады. Это значительно упрощает разводку контроллера.
Все, что нам нужно сделать, это выбрать одну ножку аркадных кнопок в качестве заземления, а другую — в качестве источника питания, который будет подключен к одному из цифровых входов на плате Arduino.
Фейдеры имеют три ножки, первая (считая снизу) — земля (-), вторая — питание (+), а третья — сигнал.
Для потенциометров ручки Pot это следующее: левая нога — заземление (-), средняя нога — сигнал, а правая нога — питание (+).
Arduino станет мозгом MIDI-контроллера. Он будет отправлять MIDI-инструкции в программное обеспечение, в зависимости от нажатия кнопки.
Из-за всех проводов интерьер будет очень запутанным, я бы посоветовал вам структурировать процесс пайки. Например, я решил спаять сначала все заземляющие провода, питание и, наконец, я припаял сигнальные перемычки.
После пайки и подключения всех выводов к плате Arduino мы можем закрыть корпус. Посмотрите фотографии, чтобы увидеть окончательный результат!
Шаг 4: Программное обеспечение и программирование
Для создания музыки с помощью Arduino вам потребуются три программы.
Во-первых, вам нужно загрузить программное обеспечение Arduino IDE, чтобы начать писать свой собственный код и загружать эскизы на плату Arduino.
Во-вторых, вам необходимо загрузить программное обеспечение LoopMidi, которое по сути является виртуальным midi-кабелем.
Наконец, для отправки ваших последовательных MIDI-данных в программное обеспечение LoopMidi вам понадобится программное обеспечение Hairless Midi to Serial Bridge. Это программное обеспечение отлично подходит для того, чтобы сообщить вам, правильно ли вы подключены, потому что вы можете видеть поток данных, обмениваемых между MIDI-контроллером и последовательным MIDI-интерфейсом Hairless.
Первым шагом является открытие программного обеспечения Arduino и кода, который я прикрепляю к этому Instructable (называемого MIDI_Controller). Кредиты предоставлены автору Майклу Бальзеру. Вам не нужно изменять код.Просто проверьте скетч, который похож на «отладку», и когда вы получите сообщение о завершении компиляции, вы можете отправить его на плату Arduino.
Затем перейдите в LoopMidi и выберите новое имя порта. После того, как вы выбрали один, просто нажмите кнопку «плюс», чтобы создать новый порт. После этого шага откройте Последовательный мост Midi без волос и начните с выбора порта MIDI In, который вы только что создали. Затем выберите тот же порт MIDI Out. Наконец, выберите последовательный порт вашего компьютера (обычно COM #).Поздравляем, вы только что разрешили своему MIDI-контроллеру обмениваться данными с компьютером!
Шаг 5: Назначение MIDI-контроллера
Если вы зашли так далеко, Поздравляем !!! Вы всего в нескольких шагах от того, чтобы начать создавать музыку с помощью Arduino и играть с помощью своего MIDI-контроллера!
Теперь вы хотите перейти к своей DAW (цифровой звуковой рабочей станции) и установить настройки для распознавания внешнего входа, которым является ваш MIDI-контроллер. Я привожу пример с Ableton Live.Вам нужно перейти в
Options >> Preferences: Input Midi Port должен быть тем, который вы определили ранее, и вам нужно включить трек и кнопку дистанционного переключения.
Теперь, если вы нажмете любую кнопку на своем MIDI-интерфейсе, вы должны увидеть мигающий свет в верхнем правом углу DAW, что означает, что программное обеспечение принимает MIDI-сигналы, которые вы отправляете! Чтобы назначить MIDI-контроллер, просто нажмите кнопку «MIDI», и цвет DAW станет фиолетовым. Теперь щелкните любой слот, а затем нажмите любую кнопку, вы увидите примечание / элемент управления, связанный с ним, что означает, что кнопка сопоставлена!
И готово! Поздравляю! Отличный проект и отличная работа! Дайте мне знать, если вы это сделали!
Arduino Nano Dew Controller Pro (DIY) скачать
Полное имя
Номер телефона
Название работы
Промышленность
Компания
Размер компании
Размер компании: 1 — 2526 — 99100 — 499500 — 9991,000 — 4,9995,000 — 9,99910,000 — 19,99920,000 или более
Получайте уведомления об обновлениях для этого проекта. Получите информационный бюллетень SourceForge.
Получите информационный бюллетень SourceForge.
Получайте информационные бюллетени и уведомления с новостями сайта, специальными предложениями и эксклюзивными скидками на ИТ-продукты и услуги.
Да, также присылайте мне специальные предложения о продуктах и услугах, касающихся:
Программное обеспечение для бизнеса
Программное обеспечение с открытым исходным кодом
Информационные технологии
Программирование
Аппаратное обеспечение
Вы можете связаться со мной через:
Электронная почта (обязательно)
Телефон
SMS
Я согласен получать эти сообщения от SourceForge.сеть. Я понимаю, что могу отозвать свое согласие в любое время. Пожалуйста, обратитесь к нашим Условиям использования и Политике конфиденциальности или свяжитесь с нами для получения более подробной информации.
Я согласен получать эти сообщения от SourceForge.net указанными выше способами. Я понимаю, что могу отозвать свое согласие в любое время. Пожалуйста, обратитесь к нашим Условиям использования и Политике конфиденциальности или свяжитесь с нами для получения более подробной информации.
Для этой формы требуется
JavaScript.
Подписывайся
Кажется, у вас отключен CSS.Пожалуйста, не заполняйте это поле.
Кажется, у вас отключен CSS.
Пожалуйста, не заполняйте это поле.
Контроллер pH Arduino. В этом руководстве мы построим Arduino… | Джереми Борер
В этом руководстве мы создадим контроллер pH Arduino, который будет использоваться для контроля уровня pH раствора и повышения pH до целевого уровня, когда pH становится слишком низким. Весь код этого проекта доступен на Github здесь.
Весь код этого проекта доступен на Github здесь.
Контроллер pH Arduino
Возможно, прошло какое-то время с тех пор, как вы были на уроке химии в средней школе и думали о шкале pH, поэтому давайте сделаем небольшой обзор, прежде чем упоминать ее в каждом следующем предложении.pH представляет собой шкалу от 0 до 14, чтобы указать, насколько кислым или основным является водный раствор. Низкий pH — кислый (лимонный сок), высокий pH — щелочной (молоко), 7 — нейтральный.
Я заинтересовался созданием регулятора pH во время работы над проектом гидропоники, в том числе по выращиванию томатов. Я видел резкие колебания pH, поскольку мои растения пили слишком много воды, что делало водяную баню очень кислой. Это не было хорошей новостью — растениям томатов нужна очень узкая полоса pH для поглощения определенных питательных веществ и производства томатов.По крайней мере, раз в неделю я проверял pH, понимал, что мое растение находится на грани смерти, и мне нужно было поднять pH. Надеюсь, моя следующая экскурсия по гидропонике пройдет намного легче с этим контроллером pH!
Эта схема не точна, следуйте приведенным ниже инструкциям по подключению.
Обсуждение деталей
Датчик pH, который я использовал в этом руководстве, — это Gravity pH Meter Pro, но на момент написания этой статьи была выпущена версия датчика V2. Я использовал этот датчик pH в расширенном проекте гидропоники в течение нескольких месяцев без каких-либо проблем, поэтому не видел необходимости в обновлении.Если бы я собирался купить новый pH-метр, я бы перешел на новую версию. Похоже, что версия V2 использует тот же pH-метр, что и версия V1, но имеет новую плату с некоторыми приятными программными преимуществами, такими как поддержка более широкого диапазона напряжений и простота калибровки.
Если вы не хотите откалибровать датчик pH, вы всегда можете использовать воду и кислую жидкость, например лимонный сок.
Схема выше не точна, следуйте приведенным ниже инструкциям по подключению вашей платы.
- Подключите 5 В и GND к макетной плате.
- Добавьте датчик pH, подключив красный к 5 В, черный к GND и синий к контакту A0 или любому другому аналоговому контакту.
- Добавьте перисталитовый насос, подключив красный к 5 В, черный к GND и зеленый к контакту 9 или любому цифровому контакту, поддерживаемому PPM.
- Загрузите свой эскиз и подключите питание с помощью сетевого адаптера 12 В или кабеля USB.
Логика работы регулятора pH довольно проста. Он считывает pH каждые пару секунд, если pH ниже определенного уровня + порог, он начинает дозирование.
Обязательно открутите крышку датчика pH! При первой калибровке я не осознавал, что должен это делать. Я поместил свой датчик в раствор 4,00 и чесал голову в течение часа, когда продолжал читать 7,00! Для обеспечения точности рекомендуется откалибровать новый датчик pH. Еще лучше откалибровать без крышки.
Калибровочные растворы pH
- Поместите датчик pH в калибровочную жидкость 7,00 pH.
- Раскомментируйте phCalibration () и загрузите эскиз.Откройте монитор последовательного порта, вы увидите вывод, в котором указано, что такое ваш phOffset .
- Обновите const phOffset , используя результат шага 3, и загрузите эскиз.
- Поместите датчик pH в калибровочную жидкость с pH 4,00 и дайте значению стабилизироваться. На вашем серийном мониторе вы должны увидеть значение pH около 4,00.
Время веселья! Мы подключили схему, загрузили эскиз и готовы регулировать pH нашей жидкости.
- Поместите датчик pH, одну из трубок насоса и воду в емкость.
- Поместите трубку другого насоса и немного калибровочного раствора с pH 10,00 во второй контейнер.
- Запустите скетч с открытым последовательным монитором. Вы должны увидеть, что он выводит текущий pH около 7,00.
- Капните небольшое количество раствора для калибровки pH 4,00 в контейнер с датчиком pH. Когда pH опускается ниже 6,75, вы должны увидеть вывод «pH ниже целевого, начинает повышать кислотность», и насос начнет перекачивать щелочной раствор в кислый раствор для повышения pH.