
Что такое освещенность?
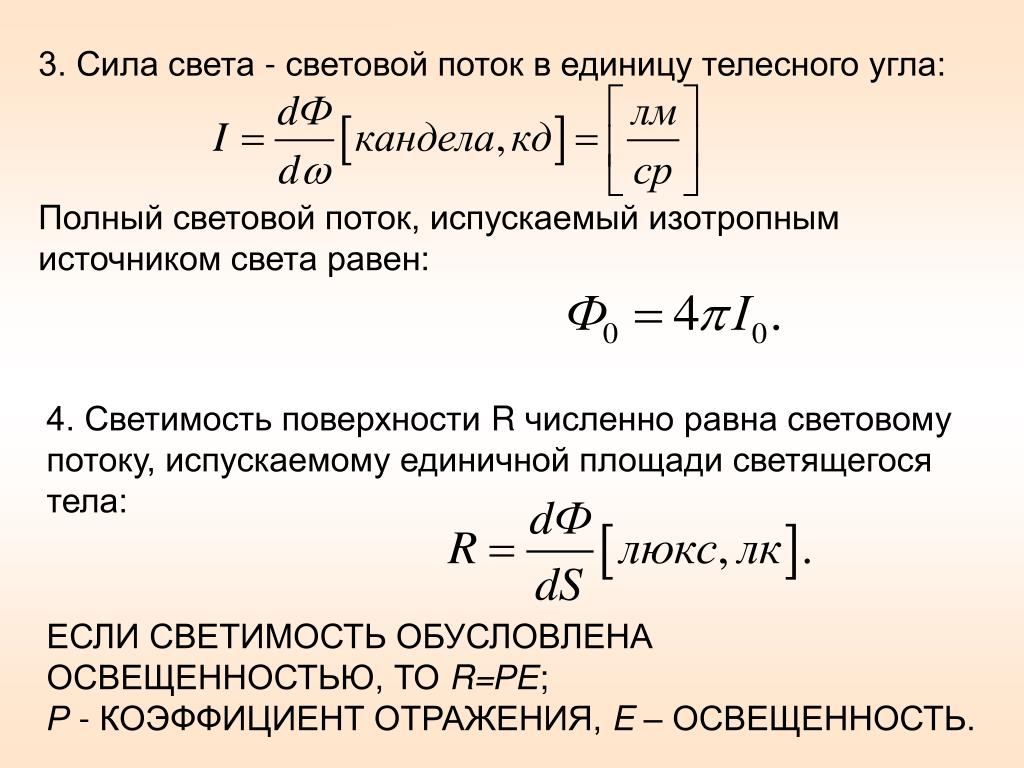
Физическая величина, численно равная световому потоку, падающему на единицу площади освещаемой поверхности, называется освещенностью.
Освещенность обозначают символом Е, и находят ее значение по формуле Е = Ф/S, где Ф — световой поток, а S – площадь освещаемой поверхности.
Для примера приведем некоторые типичные значения освещенности:
- Солнечный день в средних широтах — 100000 Лк;
- Пасмурный день в средних широтах — 1000 Лк;
- Светлая комната, освещенная лучами солнца — 100 Лк;
- Искусственное освещение на улице — до 4 Лк;
- Свет ночью при полной луне — 0,2 Лк;
- Свет звездного неба темной безлунной ночью — 0,0003 Лк
Представьте, что вы сидите в темной комнате с фонариком, и пытаетесь прочесть книгу. Для чтения нужна освещенность не меньше 30 Лк. Что вы сделаете? Во-первых, вы приблизите фонарик к книге, значит освещенность связана с расстоянием от источника света до освещаемого предмета.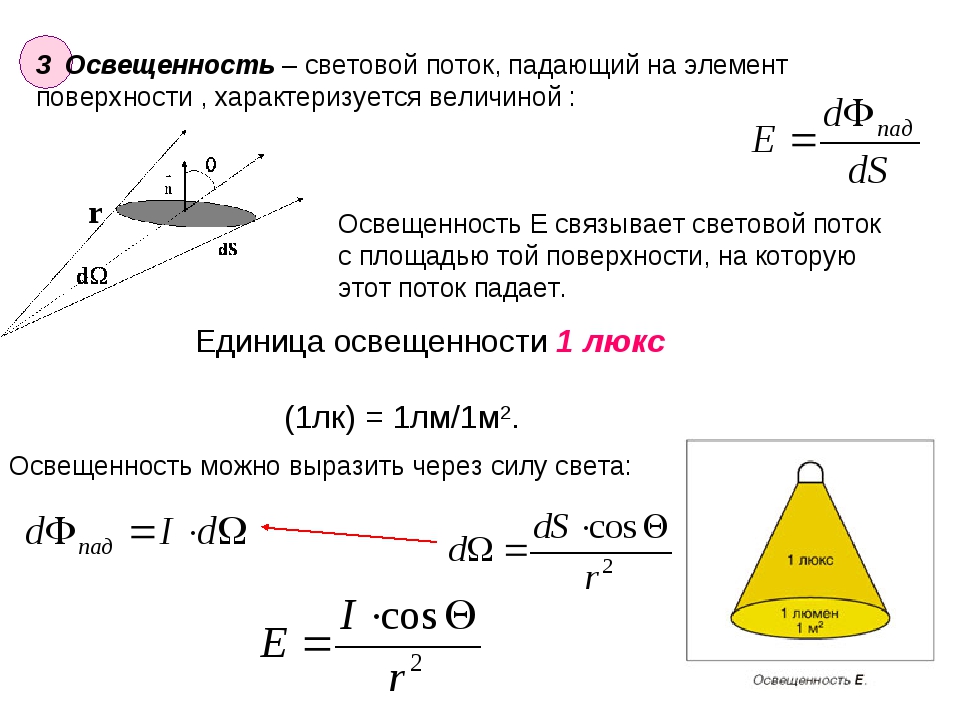 Во-вторых, вы расположите фонарик под прямым углом к тексту, значит освещенность зависит и от угла, под которым данная поверхность освещается. В-третьих, вы можете просто достать более мощный фонарик, поскольку очевидно, что освещенность тем больше, чем выше сила света источника.
Во-вторых, вы расположите фонарик под прямым углом к тексту, значит освещенность зависит и от угла, под которым данная поверхность освещается. В-третьих, вы можете просто достать более мощный фонарик, поскольку очевидно, что освещенность тем больше, чем выше сила света источника.
Когда пучок света падает под прямым углом к поверхности, световой поток распределен на наименьшей площади, если же угол увеличивать, то увеличится площадь, соответственно, уменьшится освещенность.
Освещенность напрямую связана и с силой света, и чем больше сила света, тем больше и освещенность. Экспериментально давно установлено, что освещенность прямо пропорциональна силе света источника.
В Америке и Англии используют единицу измерения освещенности Люмен на квадратный Фут или Фут-Кандела, в качестве единицы освещенности от источника, обладающего силой света в одну канделу, и расположенного на расстоянии в один фут от освещаемой поверхности.
Исследователи доказали, что через сетчатку человеческого глаза, свет воздействует на процессы, протекающие в мозге. По этой причине недостаточная освещенность вызывает сонливость, угнетает трудоспособность, а избыточное освещение — наоборот, возбуждает, помогает включить дополнительные ресурсы организма, однако, изнашивая их, если это происходит неоправданно.
По этой причине недостаточная освещенность вызывает сонливость, угнетает трудоспособность, а избыточное освещение — наоборот, возбуждает, помогает включить дополнительные ресурсы организма, однако, изнашивая их, если это происходит неоправданно.
В процессе ежедневной работы осветительных установок, возможен спад освещенности, поэтому для компенсации данного недостатка, еще на стадии проектирования осветительных установок вводят специальный коэффициент запаса.
Для естественного освещения вводят коэффициент снижения КЕО (коэффициента естественной освещенности), ведь со временем могут загрязнится светопрозрачные заполнители световых проемов, и загрязниться отражающие поверхности помещений.
Освещенность измеряют портативным прибором — люксметром. Его принцип работы аналогичен фотометру. Свет попадает на фотоэлемент, стимулируя ток в полупроводнике, и величина получаемого тока как раз пропорциональна освещенности. Есть аналоговые и цифровые люксметры.
Есть аналоговые и цифровые люксметры.
Поделиться записью
Расчет освещенности помещений врукопашную / Хабр
Постараюсь очень кратко и просто изложить метод ручного расчета освещения в помещениях, которому меня научили на курсе «Расчет освещения» школы светодизайна LiDS.
Какой должна быть освещенность
При планировании освещения, в первую очередь нужно определить соответствующую нормам целевую освещенность и посчитать общий световой поток, который должны давать светильники в помещении.
С нормативами определиться просто – либо ищем свой тип помещения в таблицах СанПиН 2.21/2.1.1/1278-03 «Гигиенические требования к естественному, искусственному и совмещенному освещению жилых и общественных зданий» и СП 52.13330.2011 «Естественное и искусственное освещение», либо соглашаемся с основным требованием по освещенности жилых помещений – 150лк или офисных помещений с компьютерами – 400лк.
Грубая оценка необходимого светового потока
По умолчанию расчет освещенности делается в программе Dialux. Но результат хотя бы приблизительно нужно знать заранее, чтобы сверить данные с оценкой «на глазок».
Но результат хотя бы приблизительно нужно знать заранее, чтобы сверить данные с оценкой «на глазок».
Как написано даже в Википедии, средняя освещенность поверхности — это отношение падающего на нее светового потока к площади. Но в реальном помещении часть светового потока светильника рабочих плоскостей не достигает, пропадая на стенах. Освещенность в помещении – это отношение общего светового потока светильников к площади помещения с поправочным коэффициентом «η».
Долю света «η», который доходит до рабочих поверхностей, можно оценить на глазок. В самом общем приближении для некоего очень среднего помещения с какими-то там светильниками до рабочих поверхностей доходит примерно половина света, а значит для очень грубой оценки можно использовать коэффициент η = 0,5.
Например, в комнате площадью 20м2 светильник со световым потоком 700лм (эквивалент лампы накаливания 60Вт) создаст освещенность Е = 0,5 × 700лм / 20м2 = 18лк. А это значит, что для достижения норматива в 150лк, нужно F = 700лм × (150лк / 18лк) =5800лм, или эквивалент 8-ми лампочек накаливания по 60Вт!
(Полкиловатта ламп накаливания на небольшую комнату! Понятно, почему нормы освещенности для жилых помещений гораздо ниже, чем для учреждений, и почему учреждения уже давно никто лампами накаливания не освещает. )
)
Более точный метод ручного расчета
Но так как помещения бывают с разными стенами, разной формы, с высокими или низкими потолками, поправочный коэффициент не обязательно равен 0,5 и для каждого случая свой: на практике, от 0,1 до 0,9. При том, что разница между η = 0,3 и η = 0,6 уже означает разбег результатов в два раза.
Точное значение η нужно брать из таблиц коэффициента использования светового потока, разработанных еще в СССР. В полном виде с пояснениями таблицы привожу в отдельном документе. Здесь же воспользуемся выдержкой из таблиц для самого популярного случая. Для стандартного светлого помещения с коэффициентами отражения потолка стен и пола в 70%, 50%, 30%. И для смонтированных на потолок светильников, которые светят под себя и немного вбок (то есть имеют стандартную, так называемую, «косинусную» кривую силы света).
Табл. 1 Коэффициенты использования светового потока для потолочных светильников с косинусной диаграммой в комнате с коэффициентами отражения потолка, стен и пола – 70%, 50% и 30% соответственно.
В левой колонке таблицы указан индекс помещения, который считается по формуле:
, где S — площадь помещения в м2, A и B — длина и ширина помещения, h — расстояние между светильником и горизонтальной поверхностью, на которой рассчитываем освещенность.
Если нас интересует средняя освещенность рабочих поверхностей (стола) в комнате площадью 20м2 со стенами 4м и 5м, и высоте подвеса светильника над столами 2м, индекс помещения будет равен i = 20м2 / ( ( 4м + 5м ) × 2,0м ) = 1,1. Удостоверившись, что помещение и лампы соответствуют указанным в подписи к таблице, получаем коэффициент использования светового потока – 46%. Множитель η = 0,46 очень близок к предположенному навскидку η = 0,5. Средняя освещенность рабочих поверхностей при общем световом потоке 700лм составит 16лк, а для достижения целевых 150лк, потребуется F = 700лм × ( 150лк / 16лк ) = 6500лм.
Но если бы потолки в комнате были выше на полметра, а комната была не «светлым», а «стандартным» помещением с коэффициентами отражения потолка, стен и пола 50%, 30% и 10%, коэффициент использования светового потока η составил бы (см. расширенную версию таблицы) η = 0,23, и освещенность была бы ровно вдвое меньше!
расширенную версию таблицы) η = 0,23, и освещенность была бы ровно вдвое меньше!
Проверяем расчеты в диалюксе
Построим в диалюксе комнату 4 × 5м, высотой 2,8м, с высотой рабочих поверхностей 0,8м и теми же коэффициентами отражения, что и при ручном счете. И повесим 9шт мелких светильников с классической косинусной диаграммой по 720лм каждый (6480лм на круг).
Рис. 1 Взятый для примера светильник Philips BWG201 со световым потоком 720лм, и его классическое «косинусное» светораспределение
Получится ли у нас средняя освещенность рабочих поверхностей в 150лк, как мы оценили вручную? Да, результат расчета в Dialux – 143лк (см. рис2), а в пустой комнате без мебели и человеческой фигуры – 149лк. В светотехнике же значения, различающиеся менее чем на 10% считаются совпадающими.
Рис. 2 Результат расчета в диалюксе – средняя освещенность рабочей поверхности (при коэффициенте запаса 1,0) составила 143лк, что соответствует целевому значению 150лк.
Рис. 3 Красивые картинки, в которые верят люди.
Заключение:
На грубую оценку примитивным методом по формуле E = 0.5 × F / S потребуется 1 минута времени, на уточнение коэффициента использования по таблицам – еще 3 минуты, на проект в диалюксе после некоторого обучения – около 20 минут и еще 20 минут, если хочется «навести красоту». Диалюкс выдает очень красивые картинки (см. рис. 3), которые стоят потраченного труда, потому что в них верят люди. Но по соотношению эффективности и трудозатрат оценка освещенности врукопашную вне конкуренции. Ручной счет прост, надежен и эффективен как саперная лопатка, дает уверенность и понимание.
| № | Помещение | Освещенность (лк) по российским нормам (СНиП 23-05-95) | Освещенность (лк) по международным нормам (МКО) |
|---|---|---|---|
| 1 | Рабочие кабинеты, офисы | 300 | 500 |
| 2 | Проектные и конструкторские бюро | 500 | 750 |
| 3 | Кабинеты для работы с ПЭВМ | 400 | 500 |
| 4 | Учебные аудитории и классы | 300 | 300 |
| 5 | Кабинеты в медицинских учреждениях | 300 | 300-500 |
| 6 | Конференц-залы | 200 | 500 |
| 7 | Помещения общественного питания | 200 | 200-300 |
| 8 | Торговые залы магазинов | 200-500 | 300-500 |
| 9 | Спортивные залы | 200 | 500 |
| 10 | Коридоры | 75 | 100 |
| Поверхность | Материал | Коэффициент отражения, % | |
| Потолок | Бетон | 40 | |
| Штукатурка | 73 | ||
| Плитка подвесного потолка белая | 70 | ||
| Плитка подвесного потолка светло-серая | 50 | ||
| Стены | Пластик светлый | 60 | |
| Гипсокартон белый | 80 | ||
| Обои (желтые, бежевые, розовые) | 50 | ||
| Обои (голубые, светло-зеленые) | 30 | ||
| Обои (красные, коричневые) | 20 | ||
| Пол | Плитка однотонная светлая | 30 | |
| Паркетная доска светлая | 20 | ||
| Паркетная доска темная | 10 | ||
| Ламинат светлый (ясень) | 30 | ||
| Линолеум светло-серый | 20 | ||
| Ковролин однотонный серый | 10 |
Расчёт освещённости | Светотехнический расчёт освещения
Расчет освещенности – понятие, под которым подразумевается комплекс работ по подбору и эффективному размещению светильников и прожекторов, а так же расчет энергопотребления осветительной системы для освещаемого объекта.
Специальные программы на этапе проектирования позволяют сделать светотехнические расчеты, которые в последствие оптимизируют затраты на электроэнергию и покажут уровень освещенности, показатели которого легко сравнить с европейскими и российскими нормами.
РАСЧЕТ ИСКУССТВЕННОГО ОСВЕЩЕНИЯ В ПОМЕЩЕНИИ ВЕДЕТСЯ В СЛЕДУЮЩЕЙ ПОСЛЕДОВАТЕЛЬНОСТИ.
1. Выбор типа источников света.
Выбор источников света производится с учетом их мощности, светового потока, срока службы, спектральных и электрических характеристик.
В качестве источников света могут применяться галогенные лампы, люминесцентные, натриевые, металлогалогенные либо приборы со светодиодными модулями. При технической необходимости или по эстетическим соображениям допускается применение различных типов источников света в пределах одного помещения.
2. Выбор системы освещения.
При однородных рабочих местах или равномерном размещении оборудования в освещаемом помещении используется общее заливающее освещение.
Если оборудование громоздкое, рабочие места с разными требованиями к освещению, либо расположены неравномерно, то используется локализованная система освещения.
При высокой точности выполняемых работ, наличии требований к направленности освещения применяется комбинированная система (сочетание общего и местного освещения).
3. Выбор типа светильников.
С учетом потребного распределения силы света, загрязненности воздуха, пожаровзрывоопасности в помещении подбирается арматура.
4. Размещение светильников в помещении.
Светильники необходимо разместить таким образом, чтобы:
— обеспечить достижение необходимого уровня освещенности наименьшим количеством световых приборов;
— соблюсти требования к равномерности или наоборот, зональности освещения;
— обеспечить простой и удобный доступ для обслуживания световых приборов.
5. Определение необходимой освещенности рабочих мест.
Нормирование освещенности производится в соответствии со СНиП 23-05-95.
Для того чтобы получить наиболее точный и грамотный расчет освещенности вашего объекта, лучше всего обратиться за проектом в профессиональную компанию, которая успешно работает в данной области не первый год.
Своевременное обращение к профессионалам позволит подобрать оптимальное количество приборов, сделать правильный выбор типа источника света, сэкономит ваши средства не только на этапе закупки оборудования, но и в процессе последующей эксплуатации установленной системы освещения.
Программы для расчёта освещённости
Для расчета освещения помещений можно использовать как советские методы — расчеты на листе бумаги, так и воспользоваться специальными компьютерными программами. На данный момент в интернете доступны для скачивания следующие программы:
· Dialux
· Relux
· «Формула света»
· Расчет освещенности Lival
· Ulysse
· Проминь
· Light-in-Night Road
Большинство программ представляют собой простейшие пошаговые редакторы, позволяющие приблизительно рассчитать коэффициент освещенности помещения. Но для профессионального решения поставленной задачи не обойтись без программы Диалюкс. Данная программа является сложным редактором, позволяющим рассчитывать не только коэффициент освещенности внутренних помещений, но и наружное освещение здания со сложной архитектурой.
Но для профессионального решения поставленной задачи не обойтись без программы Диалюкс. Данная программа является сложным редактором, позволяющим рассчитывать не только коэффициент освещенности внутренних помещений, но и наружное освещение здания со сложной архитектурой.
В Диалюксе можно сделать несколько вариантов расположения светильников и выбрать наиболее оптимальный. Можно экспериментировать с углами отражателей, мощностью и расположением светильников, чтобы добиться нужного эффекта. После каждой расстановки комбинации приборов, программа позволяет сделать расчет и вывести таблицы, схемы и изображения.
Пример расчёта освещения
Ниже приведен пример расчета систем освещения для продуктового магазина премиум сегмента основанного на трековом освещении:
Подробнее об освещении магазинов и торговом освещении можно прочитать пройдя по этой ссылке.
Для общего освещения проходов мы использовали трековые светильники под люминесцентные лампы, они экономичны и при этом дают достаточный световой поток.
Витрины с продуктами, а также отдел с алкогольной продукцией, дополнительно подсвечиваются трековыми светильниками с металлогалогенными и светодиодными лампами.
Холодильные шкафы и морозильные установки, помимо встроенных ламп также получили дополнительную подсветку с помощью трековых и встраиваемых светильников.
Получив расчет с необходимыми параметрами, можно переходить к приобретению и монтажу подобранного оборудования.
Полученный результат:
Если вас интересует услуга профессионального расчёта освещённости, поставка или монтаж осветительного оборудования, отправьте нам запрос через форму обратной связи и мы в кротчайший срок решим все вопросы связанные с организацией системы освещения на вашем объекте.
Расчёт освещённости — ДАРИОН
Свет — одно из самых удивительных чудес на Земле.
Хорошо продуманное освещение как по мановению волшебной палочки поднимает настроение и улучшает работоспособность.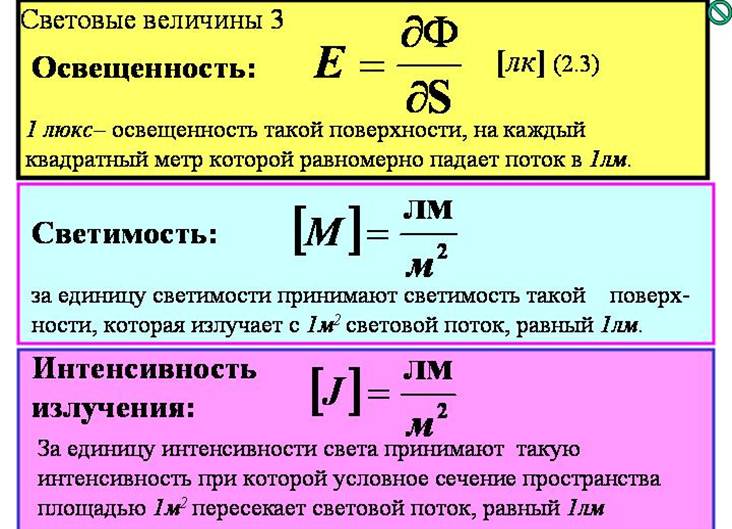
Ярко освещенная витрина, словно магнит, притягивает покупателей и лучше всякой раскрученной рекламы поднимает уровень продаж.
Красивая подсветка способна превратить в сказочный дворец даже самый заурядный архитектурный объект. Но…
Но при этом очень важно соблюсти баланс. Бьющий в глаза яркий свет вызывает раздражение. Правильно же организованная подсветка способна придать объектам элегантность и изящество, подчеркнуть их индивидуальность.
Нормативы современного уровня освещенности зависят от функционального назначения пространства.
Для расчета освещения применяют три основных метода:
- Метод коэффициента — коэффициент использования светового потока для каждого помещения вычисляется, исходя из параметров и светоотражающих свойств пола, стен, потолка, отделочных материалов мебели.
- Метод удельной мощности — предназначен для предварительного расчета установленной мощности осветительного оборудования.

- Точечный метод — используется для расчета местного, общего и локализованного освещения путем определения освещенности в каждой расчетной точке и относительно каждого источника света.

В некоторых случаях применяется комбинированный метод вычислений.
Особенно важно производить расчет освещенности помещений с использованием максимально эффективных методов в местах, где:
- человек вынужден длительно выполнять напряженную зрительную работу;
- нужна высокая точность работ;
- оборудование создает резкие, глубокие тени;
- есть вертикально расположенные рабочие поверхности.
Бесплатный расчет освещенности от ДАРИОН
Трудоемкость расчета освещения огромна. А что делать тем, кто не желает обременять себя сложными математическими формулами, но просто хочет создать атмосферу комфорта и уюта согласно собственному вкусу? Не стоит ограничивать себя в фантазиях. Ведь в Стране Доброго Света ДАРИОН есть все для воплощения любых ваших пожеланий.
Мы готовы выполнить расчет освещенности осветительных установок внутреннего, наружного, архитектурного, ландшафтного и спортивного освещения любой сложности. И делаем это абсолютно бесплатно.
Для расчетов применяются специализированные программы самых последних версий, по результатам которых определяют:
- тип, месторасположение, направление и количество осветительных приборов;
- мощность, яркость, освещенность и другие светотехнические параметры.
На основании этих расчетных данных происходит выбор светильников и источников света.
Более того, мы поделимся с вами несколькими простыми, но очень эффективными способами повышения эстетической ценности световой композиции.
Вы любите персональное отношение и современные возможности?
Добро пожаловать в ДАРИОН!
Сделать заказ на бесплатный расчет освещенности можно, заполнив форму для расчета на сайте (желтая кнопка на экране слева) или прислать ваше тех. задание на наш e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
У вас должен быть включен JavaScript для просмотра.
Метод обнаружения совмещения изображений на основе модели «Освещение-отражение» и LBP
Алахмади А., Хуссейн М., Абоалсамх Х., Мухаммад Г., Бебис Г. (2013) Обнаружение подделки совмещения изображений на основе ДКП и локального двоичного шаблона, 253–256 https: //doi.org/10.1109/GlobalSIP.2013.6736863
Bayar B, C. Stamm M (2016) Подход глубокого обучения к универсальному обнаружению манипулирования изображениями с использованием нового сверточного слоя, 5–10, https://doi. org/10.1145/2909827.2930786
Бхарати А., Сингх Р., Ватса М., Бойер К.В. (2016) Обнаружение ретуши лица с использованием контролируемого глубокого обучения.IEEE Transactions по информационной криминалистике и безопасности 11: 1903–1913. https://doi.org/10.1109/TIFS.2016.2561898
Статья
Google ученый
 «>
«>Брэдли А.П. (1997) Использование площади под кривой ROC при оценке алгоритмов машинного обучения. Распознавание образов 30: 1145–1159. http://www.sciencedirect.com/science/article/pii/S0031320396001422
Статья
Google ученый
Чен Д., Лан С., Сюй П., Чжан И (2016) «Метод улучшения изображения на основе отражения света для распознавания символов.2016 г. 9-й Международный конгресс по обработке изображений и сигналов, биомедицинской инженерии и информатике (CISP-BMEI) (2016 г.): 207–211.
Chun-su, Nam T, Jong-weon L, Goo-Rak K (2019) Эффективный алгоритм обнаружения сплайсинга изображений на основе марковских признаков. Мультимедийные инструменты и приложения 78: 12405–12419. https://doi.org/10.1007/s11042-018-6792-9
Статья
Google ученый
Dong J, Wang W, Tan T (2013) База данных оценки обнаружения подделки изображений Casia, стр. 422–426 , 165–176, https://doi.org/10.1117/12.578741
422–426 , 165–176, https://doi.org/10.1117/12.578741
Эман И.А. Э.Л., Ахмед Т., Хала Х.З. (2019) Пассивный подход к обнаружению сращивания изображений с использованием глубокого обучения и вейвлет-преобразования Хаара. IJ Компьютерная сеть и информационная безопасность 5:28–35. https://doi.org/10.5815/ijcnis.2019.05.04
Google ученый
Evgeniou T, Pontil M (2001) Машины опорных векторов: теория и приложения. В: Палиурас Г., Каркалетсис В., Спиропулос К.Д. (ред.) Машинное обучение и его приложения.ACAI 1999. Конспект лекций по информатике, том 2049. Springer, Берлин, Гейдельберг, стр. 249–257. https://doi.org/10.1007/3-540-44673-7_12
Фахиме Х., Махди Х., Фархад Г. (2015) Обнаружение подделки сращивания изображений с использованием локального двоичного шаблона и дискретного вейвлет-преобразования. В: 2-я Международная конференция по инженерии и инновациям, основанным на знаниях (KBEI), Тегеран, стр. 1074–107
1074–107
Гупта Б., Рават А., Джайн А., Арора А., Дхами Н. (2017) Анализ различных алгоритмов дерева решений для классификация в интеллектуальном анализе данных.Международный журнал компьютерных приложений 163: 15–19. https://doi.org/10.5120/ijca2017913660
Статья
Google ученый
He K, Sun J, Tang X (2013) Управляемая фильтрация изображений. IEEE Transactions on Pattern Analysis and Machine Intelligence 35(6):1397–1409. https://doi.org/10.1109/TPAMI.2012.213
Статья
Google ученый
Исаак М., Уилски М. (2018) Обнаружение подделки изображения с использованием инвариантных совпадений на основе области вращения среди соседних фунтов в секунду.Журнал интеллектуальных и нечетких систем 34: 1679–1690. https://doi.org/10.3233/JIFS-169461
Статья
Google ученый
 «>
«>Джавадул Х.Б., Амит К.Р.-С., Джейсон Б., Лакшманан Н., Б.С. М. (2017) Использование пространственной структуры для локализации управляемых областей изображения. В: Труды Международной конференции IEEE по компьютерному зрению (ICCV), стр. 4970–4979
Лааксонен Дж., Оя Э. (1996) Классификация с изучением k-ближайших соседей.В: Труды Международной конференции по нейронным сетям (ICNN’96), том 3, стр. 1480–1483
Мандип К., Савита Г. (2016) Пассивный слепой подход к обнаружению сращивания изображений на основе гистограмм dwt и lbp, в материалы международного симпозиума по безопасности в области вычислительной техники и связи, Чандигарх, Индия
Мухаммад Г., Аль-Хаммади М., Хуссейн М., Бебис Г. (2014) Обнаружение подделки изображения с использованием управляемого преобразования пирамиды и локального двоичного шаблона.Mach Vis Appl 25: 985–995. https://doi.org/10.1007/s00138-013-0547-4
Статья
Google ученый
 «>
«>Ниишака П., Бхагвати С. (2018) Техника криминалистической экспертизы цифровых изображений для обнаружения подделок путем копирования и перемещения с использованием собаки и шара. В: Хмелевский Л., Козера Р., Орловский А., Войцеховский К., Брукштейн А., Петков Н. (ред.) Компьютерное зрение и графика. ICCVG 2018. Конспект лекций по информатике, том 11114. Springer, Cham. https://doi.org/10.1007/978-3-030-00692-1_41
Niyishaka P, Bhagvati C (2020) Обнаружение подделки при копировании и перемещении с использованием больших двоичных объектов изображения и функции brsik. Приложение Multimed Tools 79:26045-26059. https://doi.org/10.1007/s11042-020-09225-6
Статья
Google ученый
Парихар А.С., Сингх К. (2018) Исследование метода улучшения изображения на основе ретинекса. В: 2-я Международная конференция по изобретательским системам и управлению (ICISC), 2018 г., стр. 619–624
619–624
Педрегоса Ф., Вароко Г., Грамфорт А., Мишель В. (2011) Scikit-learn: Machine Learning in Python.J Mach Learn Res 12:2825–2830
MathSciNet
МАТЕМАТИКА
Google ученый
Пэн Дж., Ли К., Ингерсолл Г. (2002) Введение в логистический регрессионный анализ и отчетность. Журнал исследований в области образования — J EDUC RES 96: 3–14. https://doi.org/10.1080/00220670209598786
Статья
Google ученый
Пэн З., Синтонг Х., Морариу В.И., Ларри С.Д. (2018 г.) Изучение богатых функций для обнаружения манипулирования изображениями.arXiv:1805.04953
Рахна М., Навнит А. (2019) Обнаружение сращивания изображений с марковскими функциями и PCA, Международный журнал инновационных исследований в области электротехники, электроники, приборостроения и техники управления. IJIREEICE, 7
IJIREEICE, 7
Rao Y, Ni J (2016) Подход глубокого обучения к обнаружению подделок изображений и копирования и перемещения, 2016 Международный семинар IEEE по информационной криминалистике и безопасности (WIFS), 1–6
Redi JA, Taktak W, Dugelay JL (2011) Криминалистическая экспертиза цифровых изображений: буклет для начинающих.Мультимедийные инструменты и приложения 51 (1): 133–162. https://doi.org/10.1007/s11042-010-0620-1. https://doi.org/10.1007/s11042-010-0620-1,
Статья
Google ученый
Стив Э. (2013) Гомоморфная фильтрация. Дата обращения: 19 января 2020 г.
Стивен Б. (2014) Почему яркость является ключевым компонентом цвета. https://vanseodesign.com/web-design/color-luminance/
Тарват А., Габер Т., Ибрагим А., Хассаниен А. Э. (2017) Линейный дискриминантный анализ: подробное руководство. AI Communications 30: 169–190,. https://doi.org/10.3233/AIC-170729
AI Communications 30: 169–190,. https://doi.org/10.3233/AIC-170729
MathSciNet
Статья
Google ученый
Thing V L L, Chen Y, Cheh C (2012) Усовершенствованный метод обнаружения двойного сжатия для судебной экспертизы изображений JPEG. В: Международный симпозиум IEEE по мультимедиа, 2012 г., стр. 290–297
Tomasi C, Manduchi R (1998) Двусторонняя фильтрация серых и цветных изображений. В: ICCV, стр. 839–846. citeseer.ist.psu.edu/tomasi98bilateral.html
Wei Wang, Dong J, Tan T (2009) Эффективное обнаружение сращивания изображений на основе цветности изображения. В: 16-я Международная конференция IEEE по обработке изображений (ICIP), 2009 г., стр. 1257–1260
Вилли В. (2020) Человеческое зрение и цвет, по состоянию на 20 января 2020 г. https://biomachina.org/courses/imageproc/121.pdf
 «>
«>Юань Р., Цзянцюнь Н., Хуйминь З. (2020) Локальный дескриптор глубокого обучения для обнаружения и локализации сплайсинга изображений.Доступ IEEE 8: 25611–25625. https://doi.org/10.1109/ACCESS.2020.2970735
Статья
Google ученый
Zhang Z, Zhang Y, Zhou Z, Luo J (2018) Обнаружение подделки изображений на основе границ с помощью быстрой мелкой cnn, 2658–2663
Zhongwei H, Wei L, Wei S, Jiwu H (2012) Обнаружение сплайсинга цифровых изображений на основе марковских признаков в области dct и dwt. Распознавание образов 45:4292–4299
Статья
Google ученый
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности.Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка браузера на прием файлов cookie
Существует множество причин, по которым файл cookie не может быть установлен правильно.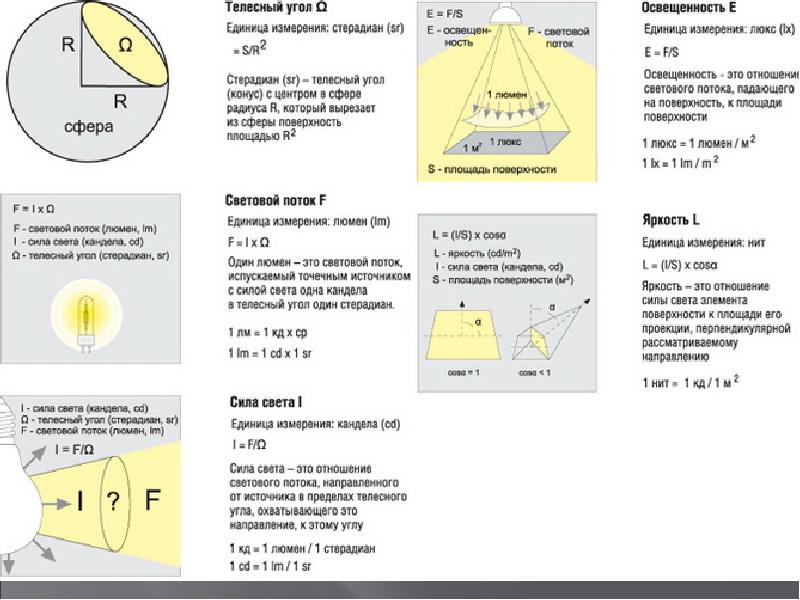 Ниже приведены наиболее распространенные причины:
Ниже приведены наиболее распространенные причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки браузера, чтобы принять файлы cookie, или спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает, хотите ли вы принимать файлы cookie, и вы отказались.Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файл cookie.
- Ваш браузер не поддерживает файлы cookie. Попробуйте другой браузер, если вы подозреваете это.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г.,
браузер автоматически забудет файл cookie. Чтобы это исправить, установите правильное время и дату на своем компьютере. - Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.

Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Предоставить доступ без файлов cookie
потребует от сайта создания нового сеанса для каждой посещаемой вами страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в файле cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только та информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт
не может определить ваше имя электронной почты, если вы не решите ввести его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступ к
остальной части вашего компьютера, и только сайт, создавший файл cookie, может его прочитать.
Полное руководство по LiDAR: обнаружение света и определение дальности
Что такое обнаружение света и определение дальности (LiDAR)?
Хотели бы вы взмахнуть своей волшебной палочкой и вдруг узнать, как далеко все от вас?
Волшебные палочки не нужны.Так работает LiDAR (Light Detection and Ranging). Конечно, без волшебной палочки!
Давайте демистифицируем обнаружение света и определение дальности. Надеюсь, прочитав это, вы пройдёте путь от нуля до героя LiDAR.
ПОДРОБНЕЕ : 6 лучших бесплатных источников данных LiDAR.
Лидар 101
LiDAR — это, по сути, дистанционная технология . С самолета или вертолета системы LiDAR посылают свет на землю.
Этот импульс достигает земли и возвращается к датчику.Затем он измеряет, сколько времени требуется, чтобы свет вернулся к датчику.
Записывая время возвращения, LiDAR измеряет расстояние. Фактически, именно так LiDAR и получил свое название — Light Detection and Ranging.
Фактически, именно так LiDAR и получил свое название — Light Detection and Ranging.
Как работает LiDAR
LiDAR — это инструмент для отбора проб. Я имею в виду, что он отправляет более 160 000 импульсов в секунду. Каждую секунду на каждый 1-метровый пиксель приходится около 15 импульсов. Вот почему облака точек LiDAR создают миллионы точек.
Обнаружение бортового света и определение дальности (LiDAR)
Системы LiDAR очень точны, потому что они контролируются на платформе. Например, точность составляет всего около 15 см по вертикали и 40 см по горизонтали.
Когда самолет движется в воздухе, устройства LiDAR сканируют землю из стороны в сторону. В то время как некоторые импульсы будут проходить непосредственно под надиром, большинство импульсов распространяются под углом (вне надира). Поэтому, когда система LiDAR вычисляет высоту, она также учитывает угол.
Как правило, линейный LiDAR имеет ширину захвата 3300 футов.Но новые технологии, такие как Geiger LiDAR, могут сканировать ширину до 16 000 футов.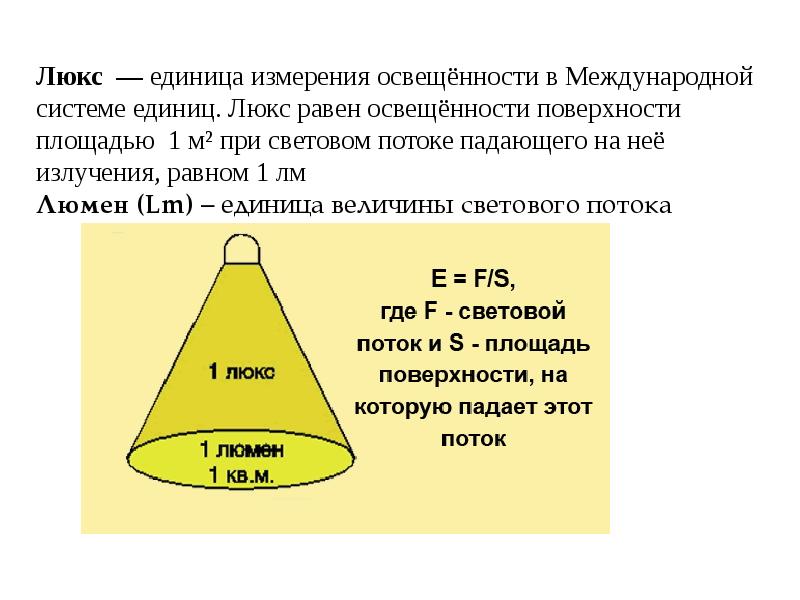 Этот тип LiDAR может охватывать гораздо более широкую зону покрытия по сравнению с традиционным LiDAR.
Этот тип LiDAR может охватывать гораздо более широкую зону покрытия по сравнению с традиционным LiDAR.
Что может генерировать LiDAR?
1. Количество возвратов
Представьте, что вы идете в лес. Затем вы смотрите на небо. Если вы видите свет, это означает, что импульсы LiDAR тоже могут проходить. Также это означает, что LiDAR может поразить голую землю или короткую растительность.
Если вы видите солнечный свет сквозь полог леса, то LiDAR тоже может
Значительное количество света проникает в полог леса так же, как солнечный свет.Но LiDAR не обязательно попадет только на голую землю. В лесистой местности он может отражаться от разных частей леса, пока импульс, наконец, не достигнет земли.
Используя LiDAR для получения точек на поверхности земли, вы не просвечиваете сквозь растительность. Вместо этого вы действительно вглядываетесь в щели между листьями. Когда он попадает в ветки, вы получаете несколько попаданий или возвратов.
2. Номер возврата
В лесу лазерный импульс направлен вниз. Когда свет падает на разные части леса, вы получаете «обратное число».Например, вы будете получать 1-й, 2-й, 3-й возврат, пока он, наконец, не упадет на голую землю. Если на пути нет леса, он просто ударится о поверхность земли.
Когда свет падает на разные части леса, вы получаете «обратное число».Например, вы будете получать 1-й, 2-й, 3-й возврат, пока он, наконец, не упадет на голую землю. Если на пути нет леса, он просто ударится о поверхность земли.
Иногда импульс света не отражается ни от чего. Как и в случае с деревьями, один световой импульс может иметь несколько возвратов. Системы LiDAR могут записывать информацию, начиная с верхней части навеса через навес до земли. Это делает LiDAR ценным инструментом для интерпретации структуры леса и формы деревьев.
3. Цифровые модели высоты
Цифровые модели рельефа (DEM) — это голые (топографические) модели земной поверхности. Используя только отражения от земли, вы можете построить ЦМР. Но это отличается от цифровых моделей местности (DTM), потому что DTM включают в себя контуры.
Используя ЦМР, вы можете создавать дополнительные продукты. Например, вы можете создать:
- Наклон (повышение или понижение, выраженное в градусах или процентах)
- Экспозиция (направление наклона)
- Отмывка (затененный рельеф с учетом угла освещения)
ПОДРОБНЕЕ : Бесплатные глобальные источники данных DEM.
4. Цифровые поверхностные модели
Как вы уже знаете, LiDAR смотрит сквозь лес. В конце концов, свет достигает земли. Затем мы получаем возвращение с голой Земли. Но как насчет первого возвращения, которое попадает в дерево?
Цифровая модель поверхности (DSM) включает отметки естественных и искусственных поверхностей. Например, он добавляет высоту от зданий, крон деревьев, линий электропередач и других объектов.
5. Модель высоты навеса
Модели высоты навеса
(CHM) дают вам истинную высоту топографических объектов на земле.Мы также называем этот тип модели высот нормализованной цифровой моделью поверхности (nDSM).
Во-первых, возьмите DSM, который включает в себя естественные и искусственные объекты, такие как деревья и здания. Затем вычтите эти высоты из голой Земли (ЦМР). Когда вы вычитаете два, вы получаете поверхность объектов, которая представляет реальную высоту от земли.
6. Интенсивность света
Сила возвратных сигналов LiDAR зависит от состава объекта на поверхности, отражающего отражение. Отражающие проценты называются интенсивностью LiDAR.
Отражающие проценты называются интенсивностью LiDAR.
Но на интенсивность света влияет несколько факторов. Например, дальность, угол падения, луч, приемник и состав поверхности (особенно) влияют на интенсивность света. Например, когда импульс отклоняется дальше, обратная энергия уменьшается.
Интенсивность света особенно полезна для различения особенностей землепользования/покрова. Например, непроницаемые поверхности выделяются на изображениях с интенсивностью света. Вот почему интенсивность света хороша для классификации изображений, такой как анализ изображений на основе объектов.
7. Классификация очков
Существует набор кодов классификации, которые Американское общество фотограмметрии и дистанционного зондирования (ASPRS) присваивает для классификации точек LiDAR.
Например, классы могут включать землю, растительность (низкую, среднюю и высокую), здания и воду и т. д. Иногда классификация точек может относиться к нескольким категориям.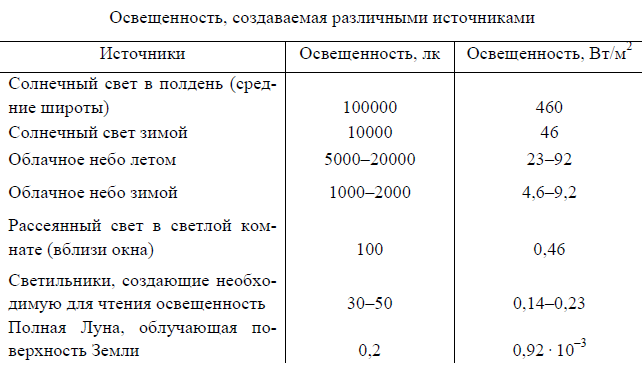 В этом случае поставщики обычно помечают эти точки вторичными классами.
В этом случае поставщики обычно помечают эти точки вторичными классами.
Поставщики могут или не могут классифицировать LiDAR.Коды генерируются отраженным лазерным импульсом в полуавтоматическом режиме. Не все поставщики добавляют это поле классификации LAS. На самом деле, это обычно оговаривается в договоре заранее.
Где открытые и бесплатные источники LiDAR?
Данные LiDAR — редкий и ценный ресурс. Но благодаря программам открытых данных они становятся все более доступными.
Так где же данные лидара? Вот список из 6 лучших бесплатных источников данных LiDAR, которые помогут вам начать поиск.
Если вы не можете найти то, что ищете, то, скорее всего, вам придется приобрести данные LiDAR. Продавцы обычно используют LiDAR в коммерческих целях на вертолетах, самолетах и дронах.
Какие существуют типы LiDAR?
Давайте рассмотрим типы систем LiDAR. Отличаются:
- Размер основания
- Длина волны
- Позиционное выравнивание
LiDAR для профилирования
Profiling LiDAR была первой системой, когда-либо использовавшейся еще в 1980-х годах. Он специализировался на прямолинейных объектах, таких как линии электропередач. Профилирующий LiDAR отправляет отдельный импульс в одну линию. В фиксированном надире он измеряет высоту на одном разрезе.
Он специализировался на прямолинейных объектах, таких как линии электропередач. Профилирующий LiDAR отправляет отдельный импульс в одну линию. В фиксированном надире он измеряет высоту на одном разрезе.
Лидар малого размера
Компактный LiDAR — это то, что мы в основном используем сегодня. Он сканирует под углом около 20 градусов. Затем он перемещается назад и вперед. Если он превысит 20 градусов, инструмент LiDAR может начать видеть стороны деревьев, а не прямо вниз.
- Топографический LiDAR составляет карту земли, как правило, с использованием ближнего инфракрасного света.
- Батиметрический лидар использует проникающий в воду зеленый свет для измерения высоты морского дна и дна реки.
Лидар большого размера
LiDAR с большим охватом использует полные формы волны с охватом 20 м. Но его точность низка, потому что возврат импульса может включать наклонную местность. Два известных эксперимента НАСА использовали этот тип лидара:
.
- SLICER (сканирование лидарным имидж-сканером навесов с помощью восстановления эхосигнала)
- LVIS (лазерный датчик изображения растительности)
Лидар наземный
Наземный LiDAR устанавливается на штатив и сканирует полушарие.Это особенно хорошо для сканирования зданий. Но есть также приложения в геологии, лесном хозяйстве и строительстве.
LiDAR с режимом Гейгера
LiDAR в режиме Гейгера все еще находится в экспериментальном состоянии. Но он специализируется на сканировании с большой высоты. Поскольку он имеет чрезвычайно широкую полосу обзора, он может охватывать большую площадь по сравнению с другими типами LiDAR.
Облако трехмерных лидарных точек здания Капитолия США в Вашингтоне, округ Колумбия
Компоненты системы LiDAR
Бортовой лидар состоит из 4 основных частей.Они работают вместе для получения высокоточных и полезных результатов:
ДАТЧИКИ ЛИДАРА : Когда самолет движется, датчики сканируют землю из стороны в сторону. Импульсы обычно находятся в зеленом или ближнем инфракрасном диапазоне.
Импульсы обычно находятся в зеленом или ближнем инфракрасном диапазоне.
ПРИЕМНИКИ GPS : Приемники GPS отслеживают высоту и местоположение самолета. Эти треки важны для получения точных значений рельефа и высоты.
ИНЕРЦИАЛЬНЫЕ ИЗМЕРИТЕЛЬНЫЕ БЛОКИ (IMU) : Во время движения самолетов IMU отслеживают его наклон.Системы LiDAR используют наклон для точного измерения угла падения импульса.
РЕГИСТРАТОРЫ ДАННЫХ : Когда LiDAR сканирует поверхность, компьютер записывает все импульсы. Затем эти записи переводятся в высоту.
Полный сигнал по сравнению с дискретным
Системы
LiDAR сохраняют возвраты LiDAR двумя способами:
- Полный сигнал
- Дискретный лидар
Дискретный лидар
Представьте, что импульсы LiDAR сканируют лесной массив.Вы получаете 1-й, 2-й, 3-й возврат, потому что импульс попадает в несколько ветвей. Затем вы получаете большой и последний импульс от голой земли.
Когда вы записываете данные как отдельные возвраты, это «лидар с дискретным возвратом». Короче говоря, дискретный LiDAR берет каждый пик и разделяет каждый возврат.
Полноволновой лидар
Когда вы записываете весь возврат как одну непрерывную волну, это полноволновой LiDAR. Итак, вы просто считаете пики, это делает их дискретными.
Несмотря на то, что данные полной формы волны более сложны, LiDAR движется к системе полной формы волны.
Проекты и приложения LiDAR
Этот список применений и применений LiDAR едва ли поверхностен. Например, вот несколько способов, как мы используем LiDAR сегодня:
ЛЕСНОЕ ХОЗЯЙСТВО : Лесоводы используют LiDAR, чтобы лучше понять структуру и форму деревьев.
САМОУПРАВЛЯЕМЫЕ АВТОМОБИЛИ : Беспилотные автомобили используют сканер LiDAR для обнаружения пешеходов, велосипедистов, знаков остановки и других препятствий.
АРХЕОЛОГИЯ : Археологи используют LiDAR, чтобы найти квадратные узоры в земле, которые были древними зданиями и пирамидами, построенными цивилизациями Майя и Египта.
ГИДРОЛОГИЯ : Гидрологи определяют порядки рек и притоки с помощью LiDAR.
ПОДРОБНЕЕ : 100 потрясающих приложений дистанционного зондирования и применения
Резюме: что такое LiDAR?
Light Detection and Ranging (LiDAR) использует лазеры для измерения высоты объектов.
Это дистанционная технология, которая сэмплирует с невероятной точностью и точками.
Он похож на сонар (звуковые волны) или радар (радиоволны), потому что посылает импульс и измеряет время, необходимое для возврата.Но LiDAR отличается от сонара и радара тем, что использует свет.
Мы обобщили обнаружение света и определение расстояния с помощью этого руководства по лидару. Теперь вы можете считать себя гуру LiDAR.
Есть вопросы? Пожалуйста, дайте нам знать с комментарием ниже.
Подписывайтесь на нашу новостную рассылку:
LiDAR: обнаружение света и определение дальности
LiDAR — это аббревиатура от слов «свет» и «радар», инструмент, разработанный для обнаружения целей и использования отраженного от объектов света в качестве визуального сонара. Li ght D etection A nd R anging (LiDAR) может определять, насколько далеко объекты находятся друг от друга, направляя лазерный луч на цель и анализируя отраженный свет. LiDAR используется для создания невероятно подробных карт, а также для помощи исследователям в области географии, археологии, геологии, сейсмологии, атмосферных наук, лазерных исследований и многого другого.
Li ght D etection A nd R anging (LiDAR) может определять, насколько далеко объекты находятся друг от друга, направляя лазерный луч на цель и анализируя отраженный свет. LiDAR используется для создания невероятно подробных карт, а также для помощи исследователям в области географии, археологии, геологии, сейсмологии, атмосферных наук, лазерных исследований и многого другого.
Первое практическое применение LiDAR было в 1960-х годах, вскоре после изобретения лазеров.Используемый в сочетании с радаром, LiDAR первоначально использовался в исследованиях атмосферы для измерения облаков Национальным центром атмосферных исследований. Позже LiDAR стал более широко известен, когда миссия «Аполлон-15» использовала его для более точного, чем когда-либо прежде, картографирования поверхности Луны.
Технические аспекты LiDAR многочисленны. LiDAR использует ультрафиолетовый свет и свет, близкий к инфракрасному, для нацеливания на определенные объекты и анализа расстояния до них на основе преломления отраженного света. Теория заключается в том, что объекты различной формы, размера, плотности и расстояния будут отражать свет с разной скоростью и, таким образом, создавать карту окружающей среды с высоким разрешением.
Теория заключается в том, что объекты различной формы, размера, плотности и расстояния будут отражать свет с разной скоростью и, таким образом, создавать карту окружающей среды с высоким разрешением.
LiDAR использовался для картографирования наводнений, вызванных ураганом «Исаак». Источник: USGS
Подобно «Аполлону-15» и работе, проделанной учеными-атмосферниками по составлению карт верхних слоев атмосферы, LiDAR продолжает оставаться инструментальной технологией в будущих космических миссиях на такие планеты, как Марс, как для пилотируемых, так и для беспилотных миссий. Технология LiDAR может отображать поверхности планет, недоступных человечеству для космических вездеходов (пока), и станет неотъемлемой частью поиска подходящих мест для посадки космических аппаратов в будущем.
Большая часть LiDAR состоит из одних и тех же основных компонентов — лазера, сканера и оптики, фотодетекторов и приемной электроники, а также систем позиционирования и навигации. Лазер, как правило, безопасен для глаз (это означает, что лазер недостаточно силен, чтобы повредить человеческий глаз), за исключением очень мощных лазеров, используемых атмосферными учеными для проникновения в самые высокие слои атмосферы.
Сканер, в зависимости от его скорости, проявляет изображения быстрее или медленнее в зависимости от качества и может сканировать определенную область.Оптика механизма LiDAR разработана для получения четкого изображения того, что было обнаружено лазером и сканером. Чувствительные фотодетекторы используются для создания физической картины отсканированных объектов, все они устанавливаются на платформы в зависимости от их использования (например, самолеты, спутники, вездеходы и т. д.). LiDAR может печатать в 2D или 3D.
LiDAR имеет множество других практических применений, включая картографирование урожайности в сельском хозяйстве, картографирование земных и внеземных тел, изучение атмосферы и участие в военных технологиях.LiDAR также используется для обнаружения объектов под землей и жизненно важен для археологов. LiDAR может найти ранее не нанесенные на карту или неизвестные линии разломов, способствующие локальным землетрясениям, а также разломы в строительных конструкциях.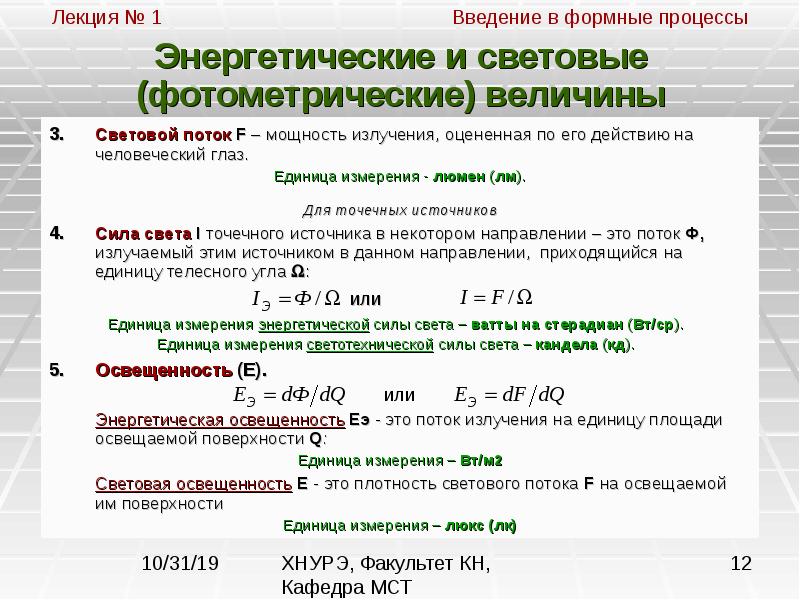
Ссылки
USGS. 2014. Обнаружение света и определение дальности. Доступ в Интернете 5 января 2015 г. https://lta.cr.usgs.gov/LIDAR
Связанные
Поделитесь этой статьей
Новые материалы для обнаружения света с круговой поляризацией
Обнаружение сигналов света с круговой поляризацией (CPL) является ключевым методом во многих передовых сенсорных технологиях.За последние десятилетия много усилий было направлено как на разработку материалов, так и на разработку устройств фотодетекторов CPL. Детекторы CPL с различной длиной волны чувствительности имеют различные применения в биовизуализации, открытии лекарств и шифровании информации. В этом обзоре мы сначала представим принцип работы современных фотодетекторов CPL, а затем общую стратегию проектирования материалов. Затем мы систематически суммируем недавний прогресс в области хиральных материалов, разработанных для обнаружения CPL, включая неорганические метаматериалы, органические вещества, гибридизированные материалы, и т. д. Мы сравниваем и анализируем факторы асимметрии фототока этих систем и представляем перспективы стратегий улучшения факторов асимметрии и увеличения длины волны обнаружения. Мы считаем, что информация, которую мы включаем в этот обзор, вызовет больший интерес у исследователей, работающих над различными аспектами органических и гибридных полупроводниковых материалов и устройств.
д. Мы сравниваем и анализируем факторы асимметрии фототока этих систем и представляем перспективы стратегий улучшения факторов асимметрии и увеличения длины волны обнаружения. Мы считаем, что информация, которую мы включаем в этот обзор, вызовет больший интерес у исследователей, работающих над различными аспектами органических и гибридных полупроводниковых материалов и устройств.
У вас есть доступ к этой статье
Подождите, пока мы загрузим ваш контент…
Что-то пошло не так. Попробуйте снова?
Попробуйте снова?
Новости оптики и фотоники — Детектирующая микроскопия с развязкой освещения
(a) DID-LSFM позволяет производить оптические срезы из расфокусированных плоскостей и позволяет получать объемные изображения живых образцов с высоким разрешением с беспрецедентной скоростью.Пример быстрой объемной визуализации с использованием DID-LSFM: (b) трехмерная визуализация движущегося червя, полученная с помощью DID-LSFM после деконволюции со скоростью 8 объемов/с, и (c) отслеживаемые траектории клеточных тел личинок, движущихся внутри почвы червь со скоростью 10 объемов/с. [Адаптировано из O.E. Olarte et al. Оптика 2 , 702 (2015).]
Современная флуоресцентная микроскопия требует визуализации больших трехмерных образцов с повышенной чувствительностью и более высоким разрешением, а также с высокой скоростью визуализации. Несколько методов визуализации, основанных на стратегиях точечного сканирования, светового листа и пуантилистов, были разработаны для удовлетворения некоторых из вышеупомянутых требований.Несмотря на успех, все они имеют важное ограничение: освещенные срезы должны быть тщательно соединены с детектирующей оптикой, чтобы выполнить эффективное оптическое сечение. Однако нарушить это ограничение возможно, и это дает новую степень свободы, которая открывает творческие возможности для извлечения информации из биологического образца.
Несколько методов визуализации, основанных на стратегиях точечного сканирования, светового листа и пуантилистов, были разработаны для удовлетворения некоторых из вышеупомянутых требований.Несмотря на успех, все они имеют важное ограничение: освещенные срезы должны быть тщательно соединены с детектирующей оптикой, чтобы выполнить эффективное оптическое сечение. Однако нарушить это ограничение возможно, и это дает новую степень свободы, которая открывает творческие возможности для извлечения информации из биологического образца.
Недавно мы сообщили о подходе к разделению оптики освещения и обнаружения в системе визуализации пассивным способом. 1 Это основано на использовании кодирования волнового фронта (WFC) в сочетании с микроскопией светового листа (LSFM). 2,3 Это просто включает в себя вставку адекватной фазовой маски в выходной зрачок собирающего объектива, увеличивая его глубину резкости (DOF). Как следствие, возможны оптические разрезы из нефокусных плоскостей.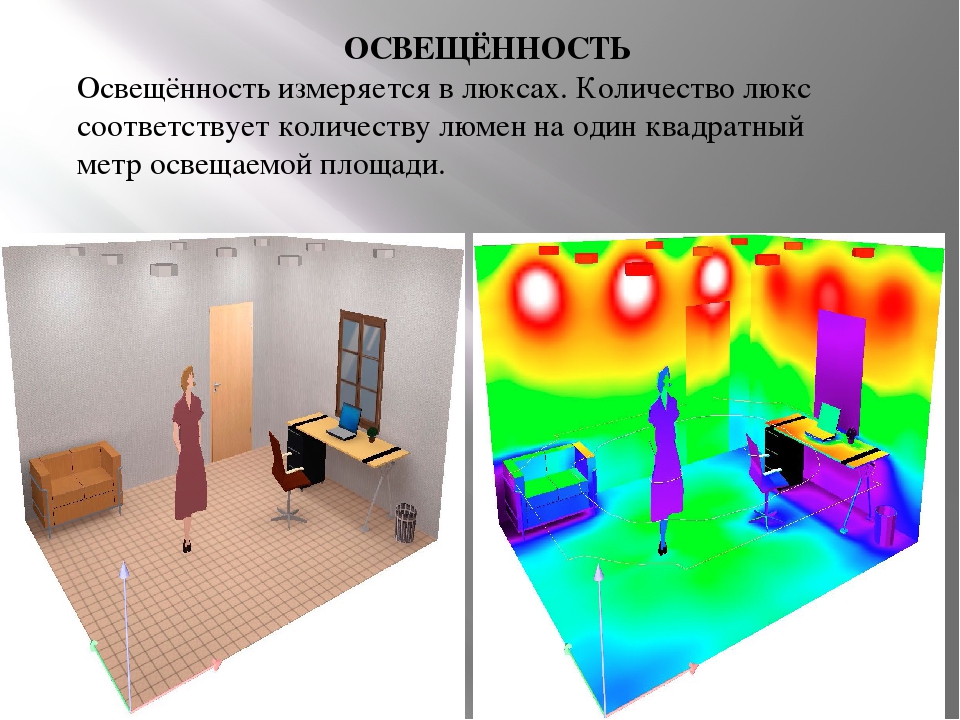 Кроме того, световой лист может быть наклонен или иметь любую желаемую форму, что позволяет отображать наклонные или инженерные поверхности. Несколько световых листов также можно комбинировать, что приводит к различным схемам освещения для структурированного освещения.Наконец, световой лист можно свободно и быстро перемещать, что позволяет быстро создавать объемные изображения.
Кроме того, световой лист может быть наклонен или иметь любую желаемую форму, что позволяет отображать наклонные или инженерные поверхности. Несколько световых листов также можно комбинировать, что приводит к различным схемам освещения для структурированного освещения.Наконец, световой лист можно свободно и быстро перемещать, что позволяет быстро создавать объемные изображения.
В нашей статье мы сосредоточились на последнем случае, чтобы продемонстрировать, как метод развязанного обнаружения освещения (DID) может использоваться для получения объемных изображений с высоким разрешением быстро движущейся динамики в живых образцах, а также для трехмерного отслеживания частиц с беспрецедентной скоростью. скорости (>70 томов/с). Поскольку единственным движущимся элементом является световой лист, узкое место для получения более быстрых трехмерных изображений больше не находится в самом микроскопе.Наш метод, естественно, требует лучших камер (более высокая чувствительность, более высокая скорость записи), более эффективных флуоресцентных меток и новых алгоритмов деконволюции. Как только эти ограничения будут преодолены, станет доступной практически любая быстрая динамика, происходящая в живых образцах.
Как только эти ограничения будут преодолены, станет доступной практически любая быстрая динамика, происходящая в живых образцах.
Эта работа имеет большое значение для быстрой объемной визуализации в нескольких приложениях, включая динамику кальция, трехмерное отслеживание клеток и измерение скорости частиц. Кроме того, весь потенциал концепции DID может быть объединен с трехмерной решетчатой микроскопией, осевым кодированием стоячей волны и сверхразрешением и может использоваться в таких приложениях, как оптогенетика и активная нейронная стимуляция.
Исследователи
Омар Э. Оларте , Хорди Андилья и Пабло Лоса-Альварес , ICFO — Институт фотоники, Испания
Давид Артигас , ICFO и Политехнический университет Каталонии, Испания
Каталожные номера
1. О.Е. Оларте и др. Оптика 2 , 702 (2015).
2. Довски Дж., Кэти У.Т. заявл. Опц. 34 , 1859 (1995).
Довски Дж., Кэти У.Т. заявл. Опц. 34 , 1859 (1995).
3. Дж. Хуискен и соавт. Наука 305 , 1007 (2004).
Обнаружение света и дальность (ЛИДАР): новый инструмент для инвентаризации нескольких ресурсов.
Обнаружение света и определение дальности (ЛИДАР): новый инструмент для инвентаризации нескольких ресурсов. | Поиск по дереву
Перейти к основному содержанию
.gov означает, что это официально.
Веб-сайты федерального правительства часто заканчиваются на .gov или .mil. Прежде чем делиться конфиденциальной информацией, убедитесь, что вы находитесь на сайте федерального правительства.
Сайт защищен.
https:// гарантирует, что вы подключаетесь к официальному веб-сайту и что любая предоставленная вами информация шифруется и передается безопасно.
Автор(ы):
Стивен Э.Ройтебух
Ганс-Эрик Андерсен
Роберт Дж. Макгоги
Тип публикации:
Научный журнал (JRNL)
Первичная(ые) станция(и):
Тихоокеанская северо-западная исследовательская станция
Источник:
Журнал лесного хозяйства: 286-292
Описание
Было показано, что воздушное лазерное сканирование лесов обеспечивает получение точных моделей местности и, в то же время, оценку нескольких переменных запасов ресурсов посредством активного обнаружения трехмерной (3D) лесной растительности. Представлены краткие обзоры технологии бортового лазерного сканирования [часто называемой «обнаружение света и определение дальности» (LIDAR)] и результаты исследований по ее использованию для измерения и мониторинга лесов. В настоящее время многие миссии бортового лазерного сканирования выполняются со спецификациями, разработанными для картографирования местности, что часто приводит к получению наборов данных, которые не содержат ключевой информации, необходимой для измерения растительности. Следовательно, необходимы стандарты и спецификации для миссий по воздушному лазерному сканированию, чтобы гарантировать их полезность для измерения и мониторинга растительности, а не просто для картографирования местности (например, для картографирования местности).г., доставка всех возвращаемых данных с интенсивностью отражения). Определены пять простых и понятных продуктов данных о лесах, полученных с помощью LIDAR, которые помогут обеспечить учет горячих потребностей лесного хозяйства при выполнении миссий LIDAR с несколькими ресурсами.
Представлены краткие обзоры технологии бортового лазерного сканирования [часто называемой «обнаружение света и определение дальности» (LIDAR)] и результаты исследований по ее использованию для измерения и мониторинга лесов. В настоящее время многие миссии бортового лазерного сканирования выполняются со спецификациями, разработанными для картографирования местности, что часто приводит к получению наборов данных, которые не содержат ключевой информации, необходимой для измерения растительности. Следовательно, необходимы стандарты и спецификации для миссий по воздушному лазерному сканированию, чтобы гарантировать их полезность для измерения и мониторинга растительности, а не просто для картографирования местности (например, для картографирования местности).г., доставка всех возвращаемых данных с интенсивностью отражения). Определены пять простых и понятных продуктов данных о лесах, полученных с помощью LIDAR, которые помогут обеспечить учет горячих потребностей лесного хозяйства при выполнении миссий LIDAR с несколькими ресурсами. После того, как стандарты будут разработаны, появится возможность максимизировать ценность постоянных повторных измерений наземных участков за счет ежегодного сбора данных бортового лазера на ограниченном количестве участков.
После того, как стандарты будут разработаны, появится возможность максимизировать ценность постоянных повторных измерений наземных участков за счет ежегодного сбора данных бортового лазера на ограниченном количестве участков.
Цитата
Ройтебух, Стивен Э.; Андерсен, Ханс-Эрик; Макгоги, Роберт Дж. 2005. Обнаружение света и определение дальности (ЛИДАР): новый инструмент для инвентаризации нескольких ресурсов. Журнал лесного хозяйства: 286-292
Примечания к публикации
- Мы рекомендуем вам также распечатать эту страницу и приложить ее к распечатке статьи, чтобы сохранить полную информацию о цитировании.
- Эта статья была написана и подготовлена У.S. Государственные служащие в служебное время и, следовательно, находятся в открытом доступе.
https://www.