
ТРМ101 ПИД-регулятор с универсальным входом в корпусе 48×48 мм
Назначение ПИД – регулятора ОВЕН ТРМ101
ПИД-регулятор температуры, давления или других физических величин в различных технологических процессах ОВЕН ТРМ101 предназначен для точного поддержания заданных параметров. Используется в составе сложного технологического оборудования: экструдеров, термопластавтоматов, печей, упаковочного, полиграфического, вакуум-формовочного оборудования и т. п.
Класс точности регулятора 0,5.
ПИД-регулятор температуры, давления и др. выпускается в щитовом корпусе типа Щ5, степень защиты IP54 со стороны передней панели.
Функциональные возможности ПИД-регулятора ОВЕН ТРМ101
- Универсальный вход для подключения широкого спектра датчиков температуры, давления, влажности и др.
- ПИД-регулирование измеренной величины с использованием «нагревателя» или «холодильника»
- Автонастройка ПИД-регулятора по современному эффективному алгоритму
- Дистанционный пуск и остановка ПИД-регулятора с помощью внешнего устройства, подключенного к дополнительному входу 2
- Сигнализация о возникновении аварийной ситуации двух типов:
- о выходе регулируемой величины за заданные пределы
- об обрыве в цепи регулирования (LBA)
- Регулирование мощности (например, для управления инфракрасной лампой) совместно с прибором ОВЕН БУСТ при использовании токового выхода 4.
 ..20 мА
..20 мА - Бесконтактное управление нагрузкой через внешнее твердотельное реле
- Встроенный интерфейс RS-485 (протокол ОВЕН)
- Конфигурирование ПИД-регулятора температуры, давления и др. величин осуществляется на ПК или с передней панели прибора
- Уровни защиты параметров для разных групп специалистов
- Два выхода в любых комбинациях: электромагнитное реле, оптосимистор, оптотранзистор, «токовая петля» 4…20 мА, унифицированное напряжение 0..10 В, специализированный выход для подключения твердотельного реле
 ..20 мА
..20 мАОВЕН ТРМ10. Технические характеристики
Технические характеристики
Питание
| Напряжение питания: | |
переменного тока | ~90…245 В |
| постоянного тока (только для корпуса Щ11) | =20. ..375 В (номинальное 24 В) ..375 В (номинальное 24 В) |
Частота напряжения питания | 47…63 Гц |
Потребляемая мощность | не более 7 ВА |
Напряжение встроенного источника питания нормирующих преобразователей | 24 ± 2,4 В |
Максимально допустимый ток источника питания | 80 мА |
Универсальные входы
Количество универсальных входов | 1 |
Типы входных датчиков и сигналов | см. таблицу «Характеристики измерительных датчиков» |
Время опроса входа: |
|
– для термопреобразователей сопротивления | не более 0,8 с |
– для других датчиков | не более 0,4 с |
Предел основной приведенной погрешности измерения: |
|
– для термоэлектрических преобразователей | ±0,5 % |
– для других датчиков | ±0,25 % |
Выходные устройства
Количество выходных устройств | 2 |
Типы выходных устройств: | |
– ПИД-регулятора (ВУ1) | Р, К, С, С3, Т, И, У |
– двухпозиционного регулятора (ВУ2) | Р, К, С, Т |
Корпус
Щитовой Щ1 | 96×96×65, IP54* |
Щитовой Щ2 | 96×48×100, IP54* |
Щитовой Щ11 | 96×96×49, IP54* |
Настенный Н | 130×105×65, IP44 |
Условия эксплуатации
Температура окружающего воздуха | –20. |
Атмосферное давление | 84…106,7 кПа |
Относительная влажность воздуха (при +35 °С и ниже без конденсации влаги) | 30…80 % |
 ..+50 °С
..+50 °СХарактеристики измерительных датчиков
01 | ТСМ (Cu50) W100=1.426 | –50…+200 °С | 0,1 °С |
09 | ТСМ (50М) W100=1.428 | –200…+200 °С | 0,1 °С |
07 | ТСП (Pt50) W100=1.385 | –200…+850 °С | 0,1 °С |
08 | ТСП (50П) W100=1. | –240…+1100 °С | 0,1 °С |
00 | ТСМ (Cu100) W100=1.426 | –50…+200 °С | 0,1 °С |
14 | ТСМ (100М) W100=1.428 | –200…+200 °С | 0,1 °С |
02 | ТСП (Pt100) W100=1.385 | –200…+850 °С | 0,1 °С |
03 | ТСП (100П) W100=1.391 | –240…+1100 °С | 0,1 °С |
29 | ТСН (100Н) W100=1.617 | –60…+180 °С | 0,1 °С |
30 | ТСМ (Cu500) W100=1. | –50…+200 °С | 0,1 °С |
31 | ТСМ (500М) W100=1.428 | –200…+200 °С | 0,1 °С |
32 | ТСП (Pt500) W100=1.385 | –200…+850 °С | 0,1 °С |
33 | ТСП (500П) W100=1.391 | –250…+1100 °С | 0,1 °С |
34 | ТСН (500Н) W100=1.617 | –60…+180 °С | 0,1 °С |
35 | ТСМ (Cu1000) W100=1.426 | –50…+200 °С | 0,1 °С |
36 | ТСМ (1000М) W100=1. | –200…+200 °С | 0,1 °С |
37 | ТСП (Pt1000) W100=1.385 | –200…+850 °С | 0,1 °С |
38 | ТСП (1000П) W100=1.391 | –250…+1100 °С | 0,1 °С |
39 | ТСН (1000Н) W100=1.617 | –60…+180 °С | 0,1 °С |
15 | ТСМ (53М) W100=1.426 (гр. 23) | –50…+200 °С | 0,1 °С |
04 | термопара ТХК (L) | –200…+800 °С | 0,1 °С |
20 | термопара ТЖК (J) | –200…+1200 °С | 0,1 °С |
19 | термопара ТНН (N) | –200…+1300 °С | 0,1 °С |
05 | термопара ТХА (K) | –200…+1360 °С | 0,1 °С |
17 | термопара ТПП (S) | –50…+1750 °C | 0,1 °С |
18 | термопара ТПП (R) | –50…+1750 °C | 0,1 °С |
16 | термопара ТПР (В) | +200…+1800 °C | 0,1 °С |
21 | термопара ТВР (А-1) | 0…+2500 °С | 0,1 °С |
22 | термопара ТВР (А-2) | 0…+1800 °C | 0,1 °С |
23 | термопара ТВР (А-3) | 0…+1800 °C | 0,1 °С |
24 | термопара ТМК (Т) | –200…+400 °C | 0,1 °С |
12 | ток 0…5 мА | 0…100 % | 0,1 % |
11 | ток 0…20 мA | 0…100 % | 0,1 % |
10 | ток 4…20 мА | 0…100 % | 0,1 % |
06 | напряжение –50…+50 мВ | 0…100 % | 0,1 % |
13 | напряжение 0…1 В | 0…100 % | 0,1 % |
 391
391 426
426 428
428Характеристики выходных устройств
Р | электромагнитное реле | ВУ1 (ПИД-регулирование) – 4 А |
К | транзисторная оптопара n–p–n типа | 400 мА при 60 В пост. |
С | симисторная оптопара | 50 мА при 250 В (0,5 А в импульсном режиме, 50 Гц, tимп. не более 5 мс) |
С3 | три симисторные оптопары для управления трехфазной нагрузкой | 50 мА на каждую оптопару при 250 В (0,5 А в импульсном режиме, 50 Гц, tимп. не более 5 мс) |
И | цифроаналоговый преобразователь «параметр–ток 4…20 мА» | нагрузка 100…800 Ом, |
У | цифроаналоговый преобразователь «параметр–напряжение 0…10 В» | нагрузка не менее 2 кОм, |
Т | выход для управления твердотельным реле | выходное напряжение 4…6 В, |
 тока
тока тока
токаФункциональная схема прибора
Схемы подключения
Чертежи, схемы, модели
Комплектность
Сопутствующие товары
Задать вопрос специалисту
ТРМ210 ПИД-регулятор с универсальным входом и RS-485
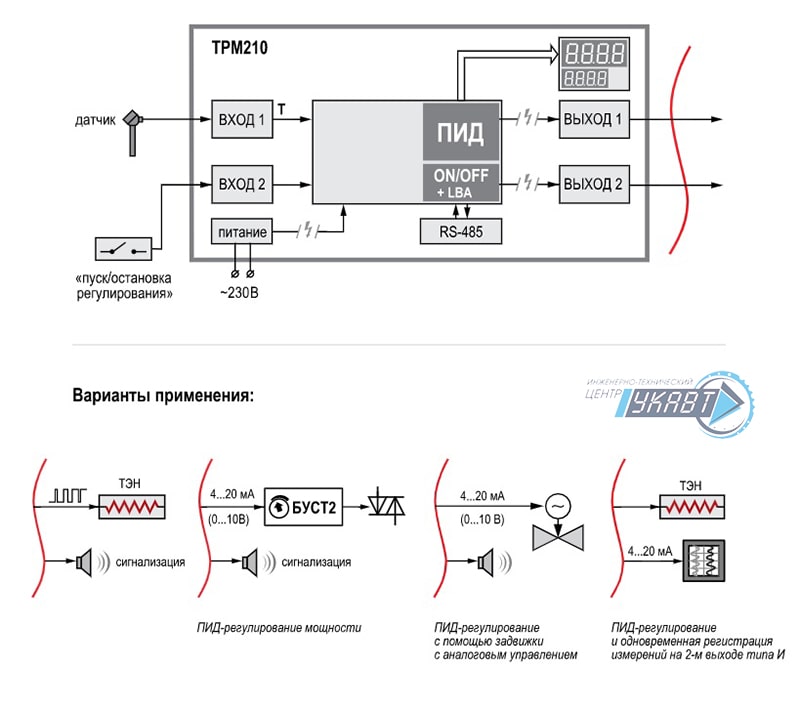
ОВЕН ТРМ210 – ПИД-регулятор температуры, давления или других физических величин, предназначен для точного поддержания заданных параметров в различных технологических процессах. Используется в составе сложного технологического оборудования: экструдеров, термопластавтоматов, печей, упаковочного, полиграфического, вакуум-формовочного оборудования и т.п.
Используется в составе сложного технологического оборудования: экструдеров, термопластавтоматов, печей, упаковочного, полиграфического, вакуум-формовочного оборудования и т.п.
Класс точности регулятора 0,5/0,25.
Прибор выпускается в 4-х типах корпусов: настенном Н, щитовых Щ1, Щ2 и новом эргономичном корпусе Н2
Функциональные возможности ПИД — регулятора ОВЕН ТРМ210
- Универсальный вход для подключения широкого спектра датчиков температуры, давления, влажности и др.
- ПИД-регулирование измеренной величины с использованием «нагревателя» или «холодильника»
- Автонастройка ПИД-регулятора по современному эффективному алгоритму
- Дистанционный пуск и остановка ПИД-регулятора с помощью внешнего устройства, подключенного к дополнительному входу 2
- Сигнализация об аварийной ситуации двух типов:
- о выходе регулируемой величины за заданные пределы
- об обрыве в цепи регулирования (LBA).
- Регулирование мощности (например, для управления инфракрасной лампой) совместно с прибором ОВЕН БУСТ при использовании токового выхода 4. ..20 мА
- Бесконтактное управление нагрузкой через внешнее твердотельное реле
- ДВА ВЫХОДА в любых комбинациях: электромагнитное реле, оптосимистор, оптотранзистор, «токовая петля» 4…20 мА, унифицированное напряжение 0..10 В, специализированный выход для управления внешним твердотельным реле
- Встроенный интерфейс RS-485 (протокол ОВЕН, Modbus ASCII/RTU)
- Конфигурирование на ПК или с передней панели прибора
- Уровни защиты параметров для разных групп специалистов
 ..20 мА
..20 мАВы можете скачать бесплатно ПО для прибора ОВЕН ТРМ210: ОРС-сервер, драйвер для работы со SCADA-системой TRACE MODE; библиотеки WIN DLL
ТРМ148 восьмиканальный ПИД-регулятор с RS-485
Внимание!
Теперь прибор ТРМ148 выпускается и в корпусе Щ7 со съемными клеммниками и меньшей глубиной щитового крепления.
Назначение прибора ОВЕН ТРМ148
Применяется для построения автоматизированных систем мониторинга, контроля и управления технологическими процессами в пищевой, металлообрабатывающей промышленности, при производстве керамики, в системах климат-контроля и др.
Прибор выпускается в щитовом корпусе типа Щ4 и Щ7
Функциональные возможности многоканального ПИД — регулятора ОВЕН ТРМ148
- Линейка стандартных модификаций для наиболее распространенных технологических процессов
- Восемь универсальных входов для подключения широкого спектра датчиков
- До восьми встроенных выходных ЭЛЕМЕНТОВ различных типов в выбранной пользователем комбинации для управления исполнительными механизмами:
- 2-х позиционными (ТЭНы, двигатели, устройства сигнализации)
- 3-х позиционными (задвижки, краны).
- Вычисление дополнительных функций от измеренных величин
- Задание графика коррекции уставки по измерениям другого входа или по времени
- Автонастройка ПИД-регуляторов
- Режим ручного управления выходной мощностью
- Встроенный интерфейс RS-485 (протокол ОВЕН)
- Широкие возможности конфигурирования:
- программа быстрого старта EasyGo;
- программа « Конфигуратор ТРМ148 » для свободного конфигурирования прибора;
- задание параметров с лицевой панели прибора.
- Быстрый доступ к уставкам

ВНИМАНИЮ ПРОИЗВОДИТЕЛЕЙ ОБОРУДОВАНИЯ!
Группа технической поддержки ОВЕН поможет создать Вам на базе любой модификации ТРМ148 заказную конфигурацию, комбинирующую различные функциональные элементы стандартных модификаций.
В комплекте поставки прибора, бесплатно: ОРС-сервер, драйвер для работы со SCADA-системой TRACE MODE; библиотеки WIN DLL.
ТРМ10. Измеритель ПИД-регулятор одноканальный — Описание
Терморегулятор ОВЕН ТРМ10 предназначен для измерения температуры или другой физической величины (веса, давления, влажности и т. п.), импульсного или аналогового управления нагрузкой по пропорционально-интегрально-дифференциальному (ПИД) закону, а также для формирования дополнительного сигнала, который может быть использован для сигнализации о выходе параметра за установленные границы или для двухпозиционного регулирования.
Прибор ОВЕН ТРМ10 рекомендуется применять для управления объектами, обладающими повышенной инерционностью, где обычное двухпозиционное регулирование не обеспечивает необходимую точность. При использовании в качестве терморегулятора ОВЕН ТРМ10 может управлять как процессом нагрева, так и процессом охлаждения объекта.
При использовании в качестве терморегулятора ОВЕН ТРМ10 может управлять как процессом нагрева, так и процессом охлаждения объекта.
Класс точности 0,5/0,25
Регулятор выпускается в корпусах пяти типов: настенном Н, щитовых Щ1, Щ2, Щ11 и Din-реечном Д.
Основные функции ПИД-регулятора ОВЕН ТРМ10
- Универсальный вход для подключения широкого спектра датчиков температуры, давления, влажности, расхода, уровня и т. п.
- ПИД-регулирование измеренной величины с использованием «нагревателя» или «холодильника»
- Автонастройка ПИД-регулятора по современному эффективному алгоритму
- Дополнительный выход для сигнализации о выходе регулируемой величины за установленные границы (или для двухпозиционного регулирования)
- Регулирование мощности (например, для управления инфракрасной лампой) в модификации с аналоговым выходом 4…20 мА, совместно с прибором ОВЕН БУСТ
- Возможность управления трехфазной нагрузкой
- Выходной сигнал тока 4. ..20 мА для регистрации измеренной величины (модиф. по типу выхода И)
- Возможность управления трехфазной нагрузкой (модиф. по типу выхода С3)
- Импульсный источник питания 90…245 В 47…63 Гц
- Встроенный источник питания 24 В для активных датчиков, выходных аналоговых устройств (ЦАП) и др.
- Программирование кнопками на лицевой панели прибора
- Сохранение настроек при отключении питания
- Защита настроек от несанкционированных изменений
 ..20 мА для регистрации измеренной величины (модиф. по типу выхода И)
..20 мА для регистрации измеренной величины (модиф. по типу выхода И)ОВЕН ТРМ251 ПИД-регулятор с пошаговыми программами и RS-485
Проанализировав опыт эксплуатации промышленных регуляторов со встроенным таймером и поддержкой выполнения программ технолога (ТРМ501, ТРМ151, МПР51), компания ОВЕН выпустила на рынок ТРМ251 – программный ПИД регулятор. Этот прибор объединил в себе возможности современного, универсального средства управления технологическим процессом, простоту в эксплуатации, интуитивно понятный интерфейс оператора и надежность, обеспеченную применением современной элементной базы. ТРМ251 соответствует классу «А» по электромагнитной совместимости в промышленных условиях.
ТРМ251 соответствует классу «А» по электромагнитной совместимости в промышленных условиях.
Назначение прибора ОВЕН ТРМ251
Одноканальный программный ПИД-регулятор ОВЕН ТРМ251 применяется для управления многоступенчатыми температурными режимами в системах управления электропечами (камерными, элеваторными, шахтными, плавильными и др.).
Прибор имеет удобный, интуитивно понятный человеко-машинный интерфейс.
Прибор выпускается в корпусах 2-х типов: настенном Н и щитовом Щ1.
Функциональные возможности прибора ОВЕН ТРМ251
- Два универсальных входа (основной и резервный)
- Функция резервирования датчиков – автоматическое включение резервного датчика в случае отказа основного
- Время опроса входа – 300 мс
- Программное пошаговое ПИД-регулирование – 3 программы технолога по 5 шагов
- Автонастройка ПИД-регулятора по современному эффективному алгоритму
- Три управляющих выхода:
- управление исполнительным механизмом (э/м реле, транзисторная или симисторная оптопара, 4. ..20 мА, выход для управления внешним твердотельным реле)
- сигнализация о выходе регулируемой величины за заданные пределы (э/м реле)
- сигнализация о неисправности датчика или обрыве контура регулирования LBA (э/м реле) или регистрация (4…20 мА)
- управление исполнительным механизмом (э/м реле, транзисторная или симисторная оптопара, 4.
- Удобный человеко-машинный интерфейс
- Сетевой интерфейс RS-485 (протоколы Modbus RTU/ASCII, ОВЕН)
- Конфигурирование на ПК или с лицевой панели прибора
- Функция сохранения образа EEPROM
 ..20 мА, выход для управления внешним твердотельным реле)
..20 мА, выход для управления внешним твердотельным реле)ПИД-регуляторы, приборы ОВЕН. Настройка — Борис Калинин. АСУ ТП
Измерение, регистрация, регулирование таких физических величин как температура, давление, влажность, расход… Куда без этого в любом технологическом процессе в любой отрасли промышленности и быту?
Наиболее часто встречаемая задача — терморегулирование: обычно это нагрев при помощи ТЭНов и последующее охлаждение естественным путем. Это простейшая задача, обычно решаемая элементарным двухпозиционным регулятором (ТРМ1, ТРМ201, ТРМ501 фирмы ОВЕН): настраиваются лишь уставка температуры и гистерезис, по которому будет происходить включение и выключение управляемого элемента. С точки зрения подобного регулятора, ему безразлично какую величину он контролирует (это зависит от датчика) и чем он управляет — нагревателем. охладителем или и тем и другим одновременно (лишь бы этот элемент управлялся дискретно, т.е. имел два состояния — включен и выключен).
С точки зрения подобного регулятора, ему безразлично какую величину он контролирует (это зависит от датчика) и чем он управляет — нагревателем. охладителем или и тем и другим одновременно (лишь бы этот элемент управлялся дискретно, т.е. имел два состояния — включен и выключен).
Задача посложней — поддержание контролируемой физической величины вблизи уставки с более-менее высокой точностью и в процессах с повышенной инерционностью. Здесь двухпозиционный регулятор не справится и на сцену выходит ПИД-регулятор, который позволяет плавно приближаться контролируемой величине к уставке, адекватно реагировать на резкие скачки этой величины и который вообще молодец. Но и настраивается он сложней: здесь уже помимо уставки и гистерезиса, задаются пропорциональный, интегральный и дифференциальный коэффициенты, причем чем выше инерционность процесса, тем сложнее подобрать эти 3 числа. Некоторые считают это почти искусством. Такие регуляторы уже могут управлять не только дискретными элементами (в импульсном режиме), но аналоговыми (ТРМ10, ТРМ101, ТРМ210). С помощью некоторых ПИД-регуляторов можно управлять запорно-регулирующими и трехходовыми клапанами, а также задвижками (ТРМ12, ТРМ212).
С помощью некоторых ПИД-регуляторов можно управлять запорно-регулирующими и трехходовыми клапанами, а также задвижками (ТРМ12, ТРМ212).
Если уж и приборы-ПИД-регуляторы не могут достичь требуемой точности поддержания контролируемой величины, то придется использовать программируемый логический контроллер (ПЛК), в котором уже программно реализовать нужного вида регулятор, тонко его отстроить и использовать другие полезные функции контроллера: ведение архива, удаленную передачу данных (телеметрия), удаленное управление процессом и многое другое.
Настраиваю и подключаю таймеры, счетчики, сигнализаторы и регуляторы уровней, архиваторы и кучу других страшных штук.
Эмуляция ПИД-регулятора с долговременной краткосрочной памятью: Часть 1 | Николас Льюис
Использование лаборатории контроля температуры для создания данных пропорционально-интегрально-производного контроллера
Фото Александра Попова на Unsplash
Вы когда-нибудь действительно воодушевлялись идеей? Может быть, вы занимаетесь новым DIY-проектом или интересным заданием на работе. Может быть, вы сошли с ума, как я, и хотите прогуляться по тропе Pacific Crest Trail (так как я скоро переезжаю в Сиэтл, поэтому меня не может не воодушевить идея полететь в Сан-Диего и пойти домой пешком).Что ж, этот проект — одна из таких идей для меня, и я надеюсь, вам понравится поездка!
Может быть, вы сошли с ума, как я, и хотите прогуляться по тропе Pacific Crest Trail (так как я скоро переезжаю в Сиэтл, поэтому меня не может не воодушевить идея полететь в Сан-Диего и пойти домой пешком).Что ж, этот проект — одна из таких идей для меня, и я надеюсь, вам понравится поездка!
Прежде чем я начну, я хочу предупредить вас, что это довольно обширный проект, и поэтому я разбиваю его на части. Они будут следующими:
- Использование лаборатории контроля температуры для создания данных пропорционально-интегрально-производного контроллера (эта статья)
- Обучение нейронной сети с долговременной краткосрочной памятью в Керасе для эмуляции ПИД-регулятора
- Контроль температуры Лаборатория управления с LSTM
- Практическое применение контроля температуры с использованием контроллера LSTM вместо ПИД-регулятора
Однажды, работая над рабочим проектом, я наткнулся на статью, в которой была представлена новая идея.Некоторым исследователям пришла в голову идея имитировать поведение модели прогнозирующего управления (MPC) с помощью нейронной сети. Идея заключалась в том, что некоторые задачи MPC чрезвычайно затратны с точки зрения вычислений, но поведение предсказуемо; , если бы мы могли имитировать это поведение, обучая глубокую нейронную сеть, мы могли бы теоретически заменить дорогостоящий в вычислительном отношении MPC гораздо более быстрой моделью машинного обучения. Единственной дорогостоящей частью процесса будет обучение модели.
Идея заключалась в том, что некоторые задачи MPC чрезвычайно затратны с точки зрения вычислений, но поведение предсказуемо; , если бы мы могли имитировать это поведение, обучая глубокую нейронную сеть, мы могли бы теоретически заменить дорогостоящий в вычислительном отношении MPC гораздо более быстрой моделью машинного обучения. Единственной дорогостоящей частью процесса будет обучение модели.
Самое интересное в том, что я тестирую идею здесь, на своем столе. Лаборатория контроля температуры идеально подходит для моделирования такого рода проблем. Я представил TCLab и некоторые базовые методы обнаружения аномалий, которые можно выполнить с помощью машинного обучения, в более ранней публикации. Если вы новичок в TCLab, вы можете прочитать мою статью или ознакомиться с многочисленными ресурсами на APMonitor.com.
Итак, вот что я решил попробовать: я хотел настроить пропорционально-интегрально-производный (ПИД) контроллер, чтобы я мог устанавливать температуру на TCLab, и контроллер регулировал нагреватель до достижения этой уставки. Затем я хотел посмотреть, смогу ли я имитировать это поведение с помощью нейронной сети с долговременной краткосрочной памятью. Если бы этот прототип работал, это открыло бы двери не только для повышения скорости вычислений, но и для таких приложений, как обнаружение аномалий.
Затем я хотел посмотреть, смогу ли я имитировать это поведение с помощью нейронной сети с долговременной краткосрочной памятью. Если бы этот прототип работал, это открыло бы двери не только для повышения скорости вычислений, но и для таких приложений, как обнаружение аномалий.
Эта серия статей посвящена машинному обучению, поэтому, если вы не знакомы с ПИД-регуляторами или теорией управления, это прекрасно; мы просто выделим несколько основных моментов, чтобы вы понимали контекст. На APMonitor.com есть несколько замечательных ресурсов, которые помогут вам разобраться в ПИД-регуляторах и способах их настройки.Эти контроллеры повсеместно используются в машиностроении, поэтому их потенциальные применения многочисленны.
Фото Уэсли Тинги на Unsplash
Системы управления повсюду. Подумайте о своем термостате: все, что вам нужно сделать, это включить температуру, и каким-то образом он знает, когда включать и выключать тепло, чтобы поддерживать такую температуру в вашем доме (за исключением, конечно, комнаты, в которой всегда есть ледяной ящик . .. ). Как оно это делает? Системы управления можно разделить на три части: датчик (то, что считывает температуру в доме), исполнительный механизм (кондиционер или печь, которые включают холодный или горячий воздух) и контроллер (компьютер в вашем термостате). это мозг операции).Данные датчика поступают в контроллер, который затем сообщает приводу, что делать.
.. ). Как оно это делает? Системы управления можно разделить на три части: датчик (то, что считывает температуру в доме), исполнительный механизм (кондиционер или печь, которые включают холодный или горячий воздух) и контроллер (компьютер в вашем термостате). это мозг операции).Данные датчика поступают в контроллер, который затем сообщает приводу, что делать.
ПИД-регуляторы
распространены повсеместно по одной причине: они просты и чрезвычайно эффективны, особенно в сочетании с моделью первого порядка плюс мертвое время (FOPDT). В случае нашего TCLab он принимает разницу между заданным значением температуры и датчиком температуры (представленным как e (t) в уравнении ниже) в качестве входных данных и выводит значение нагревателя (обозначенное как выход или OP ниже), которое будет подождите, пока температура приблизится к заданному значению.Как следует из названия, здесь есть пропорциональная, интегральная и производная части.
K_c, τ_I и τ_D называются константами настройки и определяют поведение контроллера. Вы можете сгенерировать переходную характеристику для своего TCLab, а затем получить параметры настройки для ПИД-регулятора графически. Для моего TCLab некоторые эффективные параметры настройки были K_c = 6.0, τ_i = 75.0 и τ_d = 0.0. Ваш, вероятно, будет другим, поскольку каждый TCLab ведет себя немного по-своему. Давайте теперь посмотрим на код ПИД-регулятора.Я вставил его в функцию
Вы можете сгенерировать переходную характеристику для своего TCLab, а затем получить параметры настройки для ПИД-регулятора графически. Для моего TCLab некоторые эффективные параметры настройки были K_c = 6.0, τ_i = 75.0 и τ_d = 0.0. Ваш, вероятно, будет другим, поскольку каждый TCLab ведет себя немного по-своему. Давайте теперь посмотрим на код ПИД-регулятора.Я вставил его в функцию pid (sp, pv, pv_last, ierr, dt) .
Первая часть — загрузить ваши параметры настройки и другие константы:
# PID Parameters
Kc = 6.0
tauI = 75.0 # sec
tauD = 0.0 # sec # Коэффициенты PID в терминах параметров настройки
KP = Kc
KI = Kc / tauI
KD = Kc * tauD# OPbias для контроллера (начальный нагреватель)
# верхняя и нижняя границы уровня нагревателя
op0 = 0
ophi = 100
oplo = 0
Затем мы хотим вычислить ошибку между уставка (sp) и температура (также называемая технологической переменной, pv):
# вычислить ошибку
error = sp - pv
Интегральная часть вычисляется численно, добавляя любую предыдущую ошибку к текущему временному шагу error:
# вычислить интегральную ошибку
ierr = ierr + KI * error * dt
И, наконец, производная часть контроллера (также рассчитанная численно) выглядит так:
# вычислить производную измерения
dp v = (pv - pv_last) / dt
Теперь, объединив все вместе, мы можем вычислить выход PID (op):
# вычислить выход PID
P = KP * error
I = ierr
D = -KD * dpv
op = op0 + P + I + D
И, наконец, чтобы убедиться, что мы учитываем предел нагревателя от 0 до 100, мы добавляем условие анти-сброса:
# реализуем анти-сброс-наработку
if opophi:
I = I - KI * error * dt
# clip output
op = max (oplo, min (ophi, op))
Это не так уж плохо! По крайней мере, вы узнали, как запрограммировать функцию ПИД-регулятора, что чрезвычайно полезно для промышленных контроллеров.
Теперь нам нужно запустить ПИД-регулятор на TCLab. Мы настроим несколько массивов для хранения данных по ходу работы и запустим контроллер на 90 минут, чтобы убедиться, что у нас достаточно данных. Мы будем периодически изменять заданное значение температуры, чтобы обеспечить хорошее сочетание установившегося и переходного режима. Вот как выглядит моя установка:
##### Настройка параметров запуска ###### Время работы в минутах
run_time = 90.0 # Количество циклов
loops = int (60.0 * run_time) # массивы для хранения данных
T1 = np.нули (контуры) # измеренная T (градус Цельсия)
error_sp = np.zeros (loop) # Ошибка уставки
Q1 = np.zeros (контуры) # Значения нагревателя
tm = np.zeros (контуры) # Время # Заданное значение температуры ( degC)
с tclab.TCLab () в качестве лаборатории:
Tsp1 = np.ones (loops) * lab.T1 # изменить заданное значение температуры
end = 30 # оставить первые 30 секунд заданного значения температуры как комнатную температуру
, а конец <= циклы :
start = end
# сохранить новое значение уставки температуры от 4 до 10 мин.
end + = random.randint (240 600)
Tsp1 [start: end] = random.randint (30,70)
Никогда не помешает построить график того, что должно произойти. Мы предполагаем, что в течение 90 минут ПИД-регулятор настроит нагреватель таким образом, чтобы температура соответствовала этому профилю:
График автора
Все готово! Я подробно рассказал о том, как настроить запуск TCLab в другой статье, которую я написал, но это приложение немного более продвинуто. В частности, мы вызываем нашу функцию pid (sp, pv, pv_last, ierr, dt) на каждом временном шаге, чтобы возвращать выходной сигнал нагревателя, чтобы поддерживать правильную температуру.Мы обновляем это каждую секунду; PID не требует больших вычислительных затрат, поэтому его можно легко решить за это время.
# Выполнить тест
с tclab.TCLab () в качестве лаборатории:
# Найти текущий T1, T2
print ('Температура 1: {0: 0,2f} ° C'. Формат (lab.T1))
print (' Температура 2: {0: 0,2f} ° C'.
ierr = 0,0
# Интегральная абсолютная ошибка
iae = 0,0 start_time = time.time ()
prev_time = start_time для i in диапазон (петли):
# Задержка 1 секунда
если время.time ()> prev_time + 1.0:
print ('Превышено время цикла на',
time.time () - prev_time-1.0)
else:
while time.time ()pass # Время записи и изменение во времени
# Считать температуру в Кельвинах
t = time.time ()
dt = t - prev_time
prev_time = t
tm [i] = t - start_time
T1 [i] = lab.T1 # Интегральная абсолютная ошибка
iae + = np.abs (Tsp1 [i] -T1 [i]) # Вычислить вывод PID
[Q1 [i], P, ierr, D] = pid (Tsp1 [i], T1 [i], T1 [ i-1], ierr, dt) # Записать выход нагревателя (0-100)
lab.Q1 (Q1 [i])
 format (lab.T2)) # Интегральная ошибка
format (lab.T2)) # Интегральная ошибка Давайте посмотрим, как работает контроллер:
Сюжет автора
Довольно аккуратно! Мы хотим, чтобы красная линия, которая является датчиком температуры, следовала за черной линией, которая представляет собой заданное значение температуры. Синий цвет показывает, как подогреватель отрегулирован таким образом, чтобы датчик соответствовал уставке. Мы всегда можем настроить параметры PID для различной производительности, но мы хотим перейти к части машинного обучения, поэтому для этого упражнения это идеально. И я не знаю, как вы, но мы даже не начали машинное обучение, но просто программировать собственный контроллер на нашем столе — это уже увлекательно!
Синий цвет показывает, как подогреватель отрегулирован таким образом, чтобы датчик соответствовал уставке. Мы всегда можем настроить параметры PID для различной производительности, но мы хотим перейти к части машинного обучения, поэтому для этого упражнения это идеально. И я не знаю, как вы, но мы даже не начали машинное обучение, но просто программировать собственный контроллер на нашем столе — это уже увлекательно!
Прежде всего, вы можете скачать код для этого с Github.Это упражнение во многом зависит от TCLab, но я надеюсь, что в будущем добавлю несколько альтернативных записных книжек с необработанными данными, чтобы вы могли запускать код без них.
Как здорово, что мы можем запрограммировать устройство на контроль температуры? Существует так много вариантов применения — подумайте о термостате, духовке или даже необычном гриле для барбекю. Не говоря уже о промышленных применениях температуры реактора или температуры исходного потока. Какие еще приложения вы можете придумать для этого типа контроллера?
Спасибо за внимание к этой вводной статье, особенно если вы никогда не видели контроллер. Я знаю, что обещал несколько приложений для машинного обучения, и это именно то, над чем мы работаем. Мы углубимся в это в следующем разделе (в октябре 2020 г.). Во всяком случае, я считаю, что важно понимать предысторию приложений машинного обучения. Это не только делает их актуальными для нашей работы или повседневной жизни, но также открывает двери для более глубокого понимания. Я рада услышать, какие идеи это может открыть для вас!
Я знаю, что обещал несколько приложений для машинного обучения, и это именно то, над чем мы работаем. Мы углубимся в это в следующем разделе (в октябре 2020 г.). Во всяком случае, я считаю, что важно понимать предысторию приложений машинного обучения. Это не только делает их актуальными для нашей работы или повседневной жизни, но также открывает двери для более глубокого понимания. Я рада услышать, какие идеи это может открыть для вас!
Общие сведения о линейном изменении уставки и регулировании температуры нарастания / выдержки
Что такое линейное изменение уставки?
Многие контроллеры температуры имеют возможность увеличивать свою эффективную уставку до конечного целевого значения с заранее определенной скоростью.С этой функцией часто используется аварийный сигнал отклонения, чтобы проверить, точно ли процесс следует за рампой. Когда уставка достигает максимума кривой, начинается «период выдержки», когда уставка поддерживается на этом значении.
Зачем использовать линейное изменение уставки в процессах контроля температуры?
Линейное изменение защищает процесс от быстрых изменений уставки и результирующего теплового удара, когда контроллер пытается заставить переменную процесса следовать. Это особенно полезно при отключении питания, поскольку оно направляет подъем обратно к целевому заданному значению при восстановлении питания.
Это особенно полезно при отключении питания, поскольку оно направляет подъем обратно к целевому заданному значению при восстановлении питания.
Пример линейного изменения уставки
Если вы установите скорость линейного изменения на 1000 ° F / час и уставку на 750 ° F, а текущая температура при включении составляет 200 ° F, эффективная уставка начинается с 200 ° F и повышается до 750 ° F при 1000 ° F в час. Аналогичный процесс происходит при переключении обратно в автоматический режим из ручного управления.
Точная реализация линейного изменения уставки зависит от модели контроллера. К различным функциям относятся:
- реализация линейного изменения при изменении заданного значения
- реализует линейное изменение только при изменении активной уставки (например,грамм. от локальной уставки 1 до локальной уставки 2)
- регулируемое время выдержки, после которого управляющие выходы отключаются
- бессрочное замачивание после плунжера
Как работают сегменты подъема / замачивания?
Существует несколько различных типов профильных сегментов, а также обычно называемые «наклон» и «впитывание». Сегменты профиля могут быть пандусами, выдержками (выдержками) или ступенями. Также возможны дополнительные специальные сегменты, такие как зацепы, концы, петли или соединения.
Сегменты профиля могут быть пандусами, выдержками (выдержками) или ступенями. Также возможны дополнительные специальные сегменты, такие как зацепы, концы, петли или соединения.
- Шаговый сегмент мгновенно увеличивает или уменьшает значение уставки
- Сегмент линейного изменения увеличивает / уменьшает заданное значение в течение установленного времени или с определенной скоростью.
- Сегмент выдержки (также называемый сегментом выдержки) сохраняет значение предыдущего сегмента в течение определенного времени.
- Сегмент удержания поддерживает значение предыдущего сегмента до тех пор, пока профилировщику не дадут команду перейти к следующему сегменту.
- Сегмент цикла отправляет профиль обратно в предыдущий сегмент для выполнения этой части профиля более одного раза.
- Присоединиться к сегменту завершает текущий профиль и запускает другой.
- Конечный сегмент останавливает текущий профиль.

Профилировщики обычно имеют опции для одного или нескольких выходных событий сегмента.
Узнайте больше о том, как программируемые контроллеры температуры работают с сегментами.
Хотите узнать больше? Посмотрите, как Иэн Парнелл, руководитель службы технической поддержки West Control Solutions, более подробно обсуждает линейное изменение уставки и функции линейного изменения / выдержки.
ПИД-регулятор с непрерывным или дискретным временем
Типы данных
Параметры на этой вкладке в основном используются для генерации кода с фиксированной точкой с помощью Fixed-Point Designer ™. Они определяют, как числовые величины, связанные с блоком, хранятся и обрабатываются при генерации кода.
Если вам нужно настроить типы данных для генерации кода с фиксированной точкой, щелкните Открыть инструмент с фиксированной точкой и используйте этот инструмент для настройки остальных параметров на вкладке.Для получения информации об использовании инструмента фиксированной точки см. Автомасштабирование объектов данных с помощью инструмента фиксированной точки (конструктор фиксированной точки).
После использования инструмента «Фиксированная точка» можно использовать параметры на этой вкладке, чтобы при необходимости изменить настройки типа данных с фиксированной точкой. Для каждой величины, связанной с блоком, вы можете указать:
Тип данных с плавающей запятой или с фиксированной запятой, включая то, унаследован ли тип данных от восходящих значений в блоке.
Минимальное и максимальное значения количества, которые определяют, как количество масштабируется для представления с фиксированной точкой.
Для помощи в выборе подходящих значений щелкните, чтобы открыть Помощник по типу данных для соответствующего количества. Дополнительные сведения см. В разделе Определение типов данных с помощью помощника по типам данных.
Дополнительные сведения см. В разделе Определение типов данных с помощью помощника по типам данных.
Конкретные величины, перечисленные на вкладке «Типы данных», различаются в зависимости от того, как вы конфигурируете блок ПИД-регулятора. Как правило, вы можете настроить типы данных для следующих типов величин:
Вывод продукта — сохраняет результат умножения, выполненного под маской блока.Например, выходной сигнал P продукта хранит выходной сигнал блока усиления, который умножает входной сигнал блока на пропорциональное усиление P .
Параметр — сохраняет значение параметра числового блока, например P , I или D .
Выход блока — сохраняет выходные данные блока, находящегося под маской блока ПИД-регулятора. Например, используйте Вывод интегратора, чтобы указать тип данных вывода блока, называемого интегратором.Этот блок находится под маской в подсистеме интегратора и вычисляет член интегратора действия контроллера.
Аккумулятор — хранит значения, связанные с блоком суммы. Например,
SumI2 Accumulator устанавливает тип данных аккумулятора
связан с блоком суммы SumI2. Этот блок находится под маской в задней части.
Подсистема расчета подсистемы Anti-Windup.

Как правило, вы можете найти блок, связанный с любым параметром в списке, просмотрев под
Маска блока ПИД-регулятора и исследование его подсистем.Вы также можете использовать Model Explorer
для поиска под маской имени указанного параметра, например SumI2 .
(См. Модель
Explorer .)
Соответствие входным и внутренним типам данных
По умолчанию для всех типов данных в блоке установлено значение Inherit: Наследовать через внутреннее правило . С этим параметром Simulink выбирает типы данных, чтобы сбалансировать числовую точность, производительность и размер сгенерированного кода, учитывая при этом свойства встроенного целевого оборудования.
При некоторых условиях может возникнуть несовместимость между типами данных в блоке. За
например, в непрерывном времени блок интегратора под маской может принимать только сигналы
тип двойной . Если входной сигнал блока является типом, который не может быть
преобразован в двойной , например uint16 ,
внутренние правила наследования типов вызывают ошибку при генерации кода.
Чтобы избежать таких ошибок, вы можете использовать настройки типов данных для принудительного преобразования типа данных.За
Например, вы можете явно установить P product output , I product
выход и продукт D выход до
двойной , гарантируя, что сигналы, достигающие
непрерывные интеграторы типа double .
Как правило, не рекомендуется использовать блок в непрерывном времени для генерации кода.
Приложения. Однако подобные ошибки типа данных могут возникать в дискретное время, если вы
Однако подобные ошибки типа данных могут возникать в дискретное время, если вы
явно установить некоторые значения для типов данных, несовместимых с нисходящим сигналом
ограничения внутри блока.В таких случаях используйте настройки типов данных, чтобы убедиться, что все
типы данных внутренне совместимы.
Операционные параметры с фиксированной точкой
Целочисленный режим округления — Режим округления для операций с фиксированной точкой
Этаж (по умолчанию) | Потолок | Конвергентный | Ближайшие | Круглый | Самый простой | Ноль
Укажите режим округления для операций с фиксированной точкой.Для получения дополнительной информации см. Округление (Конструктор фиксированной точки).
Параметры блока всегда округляются до ближайшего представимого значения. Чтобы контролировать
округление параметра блока, введите выражение, используя функцию округления MATLAB ® в поле маски.
Программное использование
Параметр блока: RndMeth |
| Тип: вектор символов |
Значения: «Потолок» | «Конвергентный» | «Этаж» | «Ближайший» | «Круглый» | «Самый простой» | |
По умолчанию: «Пол» |
Насыщение при целочисленном переполнении — Метод действия при переполнении
выкл. (по умолчанию) | на
Укажите, будет ли переполнение насыщаться или переноситься.
off— Переполнение переносится на соответствующее значение, которое может представлять тип данных.Например, число 130 не помещается в 8-битовое целое число со знаком и преобразуется в -126.
на— Переполнение насыщается до минимального или максимального значения, которое может представлять тип данных.Например, переполнение, связанное с 8-битным целым числом со знаком, может достигать -128 или 127.

Совет
Установите этот флажок, если в вашей модели возможно переполнение и вы хотите явное защита от насыщения в сгенерированном коде.
Снимите этот флажок, если хотите повысить эффективность созданного кода.
Снятие этого флажка также помогает избежать чрезмерного определения того, как блок обрабатывает сигналы вне диапазона. Для получения дополнительной информации см. Устранение ошибок диапазона сигналов.
Когда вы устанавливаете этот флажок, насыщение применяется ко всем внутренним операциям в блоке, а не только к выходу или результату.
В общем, процесс генерации кода может обнаружить, когда переполнение невозможно.
В этом случае генератор кода не создает код насыщения.
 В этом случае генератор кода не создает код насыщения.
В этом случае генератор кода не создает код насыщения.Программное использование
Параметр блока: SaturateOnIntegerOverflow |
| Тип: вектор символов |
Значения: 'off' | 'on' |
По умолчанию: 'off' |
Блокировка настроек типа данных от изменений инструментами с фиксированной запятой — Предотвращение переопределения типов данных инструментами с фиксированной запятой
off (по умолчанию) | на
Выберите этот параметр, чтобы запретить инструментам с фиксированной запятой переопределять типы данных, которые вы указываете в этом блоке.Для получения дополнительной информации см. Блокировка настройки типа выходных данных (конструктор фиксированной точки).
Программное использование
Параметр блока: LockScale |
| Тип: вектор символов |
Значения: 'off' | 'on' |
По умолчанию: 'off' |
Приложение для отслеживания скорости двигателя SI
Метод управления скользящим режимом (SMC) с фильтром нижних частот первого порядка (LPF) объединен с новым адаптивным ПИД-регулятором. Предлагается для следящего управления неопределенной нелинейной системой. В предлагаемой схеме управления закон адаптации может обновлять ПИД-регулятор в оперативном режиме во время процесса управления в течение короткого периода времени. Явление вибрации SMC может быть уменьшено за счет включения LPF первого порядка, в то время как надежность системы управления аналогична таковой для скользящего режима. При анализе управления с обратной связью были проанализированы условие сходимости в фазе достижения и условие существования скользящего режима.Устойчивость замкнутого управления гарантируется в смысле прямого метода Ляпунова. Моделирование и экспериментальное применение управления отслеживанием скорости двигателя с искровым зажиганием (SI) через архитектуру электронного управления дроссельной заслонкой предназначены для проверки эффективности и осуществимости предложенной схемы управления.
Предлагается для следящего управления неопределенной нелинейной системой. В предлагаемой схеме управления закон адаптации может обновлять ПИД-регулятор в оперативном режиме во время процесса управления в течение короткого периода времени. Явление вибрации SMC может быть уменьшено за счет включения LPF первого порядка, в то время как надежность системы управления аналогична таковой для скользящего режима. При анализе управления с обратной связью были проанализированы условие сходимости в фазе достижения и условие существования скользящего режима.Устойчивость замкнутого управления гарантируется в смысле прямого метода Ляпунова. Моделирование и экспериментальное применение управления отслеживанием скорости двигателя с искровым зажиганием (SI) через архитектуру электронного управления дроссельной заслонкой предназначены для проверки эффективности и осуществимости предложенной схемы управления.
1. Введение
Наличие неопределенной нелинейности в физических системах было тщательно изучено, поскольку большинство реальных систем являются довольно сложными динамическими нелинейными с большими неопределенностями, которые могут повлиять на неточность и низкую надежность системы управления. Для этого были разработаны многочисленные схемы управления; например, скользящее управление [1–3], интеллектуальное управление [4, 5], линеаризация с обратной связью [6] и адаптивное управление [7–9].
Для этого были разработаны многочисленные схемы управления; например, скользящее управление [1–3], интеллектуальное управление [4, 5], линеаризация с обратной связью [6] и адаптивное управление [7–9].
С другой стороны, благодаря своей простоте в архитектуре и простой конструкции, пропорционально-интегрально-производное (ПИД) регулирование является приемлемым и широко применяется во многих практических приложениях. Ключ к проектированию высоких возможностей ПИД-регулятора зависит от определения параметров усиления ПИД-регулятора, которые должны быть должным образом отрегулированы, и это привело к развитию методов самонастройки трех параметров ПИД-регулятора.В последнее время для онлайн-настройки ПИД-регулятора в основном применяются методы адаптивного управления. Гибкость настройки ПИД заключается в определении основных коэффициентов усиления ПИД, которые могут быть скорректированы в оперативном режиме в соответствии с законами адаптации и с использованием сигнала ошибки для реализации регулируемых коэффициентов усиления в режиме онлайн во время процедуры управления [10–13]. Однако стратегия адаптивного управления способна обрабатывать только постоянную параметрическую неопределенность, недостаточную устойчивость к внешним воздействиям и точную модель системы, которая требуется [14].
Однако стратегия адаптивного управления способна обрабатывать только постоянную параметрическую неопределенность, недостаточную устойчивость к внешним воздействиям и точную модель системы, которая требуется [14].
Метод управления скользящим режимом (SMC) является одной из стратегий управления, позволяющих доминировать над параметрическими неопределенностями и внешними возмущениями, в то время как принцип управления не требует точной информации о модели системы [15–18]. Тем не менее, если существует скользящий режим, явление вибрации является основным препятствием для применения SMC [19–21]. В ходе большой исследовательской работы изучается явление дребезга смягчающего режима скользящего режима, объединенного с фильтром нижних частот [22–26], поскольку он может найти компромисс между уменьшением дребезга и точностью управления.Включение SMC с фильтрацией с обратной связью позволяет реализовать захват управляющего сигнала и аппроксимацию возмущений [24], в то время как устойчивость аналогична таковой в скользящем режиме.
В этом исследовании SMC с ФНЧ первого порядка объединяется с новым адаптивным ПИД-регулятором. Предлагается для задач точного слежения и управления неопределенными нелинейными системами. В предлагаемой схеме управления ПИД-регулятор регулируется во время процедуры управления в соответствии с законами адаптации, в то время как колебания управляющего сигнала могут быть уменьшены с помощью LPF первого порядка.Устойчивость замкнутого управления может быть гарантирована в смысле прямого метода Ляпунова [27, 28]. Эффективность и реализуемость предложенной схемы управления оцениваются в задаче отслеживания скорости двигателя с искровым зажиганием (СИ) через архитектуру электронного управления дроссельной заслонкой. Интерес вызывает задержка динамики заполнения впускного коллектора, а задержка мощности всасывания является недостатком на практике для управления частотой вращения двигателя с помощью метода регулирования дроссельной заслонки [29, 30].Кроме того, система двигателя представляет собой довольно сложный механизм, многозадачность и в значительной степени неопределенные явления нелинейности, которые присутствуют в механизме двигателя [31]. Таким образом, управление частотой вращения двигателя является известной проблемой в задаче неопределенных нелинейных систем управления [32–34].
Таким образом, управление частотой вращения двигателя является известной проблемой в задаче неопределенных нелинейных систем управления [32–34].
Повышение переходных характеристик и точность отслеживания скоростных характеристик полезны при ускорении транспортного средства в любых рабочих условиях, особенно в переходном режиме гибридной операционной системы гибридных транспортных средств [35, 36].Цель управления скоростью двигателя, возникающая в результате реакции на скорость, состоит в том, чтобы иметь возможность отслеживать желаемую скорость в любом рабочем состоянии [37], особенно в переходном состоянии, которое оказывает значительное влияние на оптимизацию маневренности управления скоростью двигателя. Высокая точность отслеживания скорости приводит к достижению оптимальной рабочей точки двигателя для других приложений. Кроме того, повышенная производительность двигателя, сниженный расход топлива и выброс выхлопных газов — другие преимущества оптимизированного управления частотой вращения двигателя [38, 39].
Остальная часть этого документа организована следующим образом. Во-первых, мы представляем дизайн контроллера и анализ управления с обратной связью. В разделе 3 представлено описание модели управления частотой вращения двигателя. В разделе 4 представлены результаты моделирования и экспериментов для проверки эффективности подхода к управлению разработкой. Наконец, представлены выводы исследования.
2. Конструкция контроллера и анализ управления с обратной связью
2.1. Формулировка системы
В системе двигателя два динамических элемента первого порядка, которые являются динамикой вращения и динамикой заполнения коллектора, ведут себя как система второго порядка [40].Однако порядок в системе может быть уменьшен за счет подстановки крутящего момента двигателя, описанного методом среднего значения [41], в динамику вращения коленчатого вала первого порядка из закона Ньютона. Таким образом, для простоты в данной работе система реализуется как неопределенная нелинейная система первого порядка, удовлетворяющая условиям разъединения и согласования [28, 40]. Его можно описать в канонической форме: где — первый порядок вектора состояния, — время, — известная нелинейная функция, — это глобальный вектор состояния для нелинейной квадратной системы, — количество независимых координат, — вход управления, является неопределенным элементом, который присутствует только в высшем порядке системы, и является матрицей распределения усиления управления, которая положительно определена по всем аргументам.Цель состоит в том, чтобы заставить состояние системы достичь желаемого состояния, чтобы ошибка,. Мало того, что закон управления должен направлять реакцию на желаемое значение, он также должен иметь возможность преодолевать неопределенности системы.
Его можно описать в канонической форме: где — первый порядок вектора состояния, — время, — известная нелинейная функция, — это глобальный вектор состояния для нелинейной квадратной системы, — количество независимых координат, — вход управления, является неопределенным элементом, который присутствует только в высшем порядке системы, и является матрицей распределения усиления управления, которая положительно определена по всем аргументам.Цель состоит в том, чтобы заставить состояние системы достичь желаемого состояния, чтобы ошибка,. Мало того, что закон управления должен направлять реакцию на желаемое значение, он также должен иметь возможность преодолевать неопределенности системы.
В работе Xu et al. [24], неопределенности можно оценить, добавив второй фильтр нижних частот; в результате усиление переключения уменьшается до минимального уровня, в то время как первый фильтр нижних частот сглаживает управление переключением. Однако во время фазы достижения фильтра отсутствуют управляющие входы от обоих фильтров нижних частот, и член упреждающей связи от эквивалентного элемента управления может не иметь возможности преодолеть неопределенности. Если другой управляющий вход во время фазы достижения может быть отрегулирован соответствующим образом, может быть достигнуто лучшее управление переходными процессами. Приведенные ниже допущения сделаны для вывода закона управления в следующем разделе.
Если другой управляющий вход во время фазы достижения может быть отрегулирован соответствующим образом, может быть достигнуто лучшее управление переходными процессами. Приведенные ниже допущения сделаны для вывода закона управления в следующем разделе.
Предположение 1. Функции, и являются непрерывными для всех и непрерывно дифференцируемыми.
Допущение 2. Неопределенности находятся в пределах диапазона матрицы распределения управления, и изменение неопределенности не влияет на направление управления.
Предположение 3. Расчетная матрица распределения управления является обратимой и постоянно зависит от параметрической неопределенности [28].
Предположение 4. Позвольте быть ограниченным сверху и ограниченным сверху, где и являются известными константами.
Предположение 5. Входная матрица ограничена, а ее производная ограничена сверху, где, и — известные константы.
2.2. Дизайн управления с обратной связью
Для разработки закона управления определение скользящей функции, аналогичное работе Слотина и Ли [28], адаптировано к системе первого порядка. Функция скольжения может быть сделана для каждого состояния как
Функция скольжения может быть сделана для каждого состояния как
Затем -мерная функция скольжения и ее первая производная для системы в (1) могут быть выражены как где есть компоненты, удовлетворяющие функции скольжения, указанной ранее, и является положительной постоянной матрицей коэффициентов с полный рядовой ранг. Его аргумент — вектор градиента функции скольжения [42], который равен единице на каждой поверхности скольжения из-за системы первого порядка.
Как показано на рисунке 1, управляющий вход — это сигнал низкочастотного фильтра, который является результатом фильтра нижних частот первого порядка сигнала переключения; .Пусть, и обозначают управляющий сигнал адаптивной настройки PID. представляет собой аппроксимацию управляющего входа без учета последнего члена правой части (1) и представляет собой единичную матрицу. Следовательно, может быть получено приближение, аналогичное идее эквивалентного управляющего входа [15], которое составляет
Для решения, оно может быть получено по тому, где находится частота среза. ФНЧ активируется в момент времени с нулевым начальным состоянием и заданным временем достижения. Для его можно получить, где — пропорциональное усиление, — интегральное усиление и — производное усиление.,, и которые не равны нулю.
ФНЧ активируется в момент времени с нулевым начальным состоянием и заданным временем достижения. Для его можно получить, где — пропорциональное усиление, — интегральное усиление и — производное усиление.,, и которые не равны нулю.
2.2.1. Достижение фазового анализа
В этом разделе представлено описание расчета времени достижения для замкнутой системы управления с помощью предложенного закона управления в (4). В течение времени достижения () ФНЧ первого порядка будет активирован при нулевом начальном состоянии входного сигнала фильтра. Следовательно, для. Следовательно, управляющий вход во время фазы достижения получает
. Обратите внимание, что предположение 5 может быть расширено до концепции запаса усиления [28] для вывода закона адаптации.Для обеспечения устойчивости в фазе достижения выбрана теорема Ляпунова, чтобы доказать устойчивость регулятора, и ошибки могут сходиться к поверхности скольжения, если она построена для достижения первой производной кандидата в функцию Ляпунова. Выберите кандидата функции Ляпунова. Следовательно, на этапе достижения можно описать как
Выберите кандидата функции Ляпунова. Следовательно, на этапе достижения можно описать как
Затем производную функции Ляпунова (9) можно переписать как
Чтобы найти условие, удовлетворяющее устойчивости по Ляпунову, необходимо подставить первую производную функции скольжения в (10).Его можно найти где угодно. Уравнение (11) показывает тот факт, что коэффициент усиления управления нельзя определить точно. В дальнейшем концепция запаса усиления [28] адаптируется без потери общности из-за условий разъединения и согласования. Исходя из концепции, оценка усиления может быть описана с помощью,, а затем граница коэффициента усиления управления может быть реализована в форме while, и начальное значение в каждом аргументе трех коэффициентов усиления (, и) части PID положительный. Подстановка (11) в (10) дает где, что является членом адаптации.Для (12), если выбрано преодоление части неопределенностей, можно определить закон адаптации в последнем члене, чтобы, следовательно, устранить остальные из них.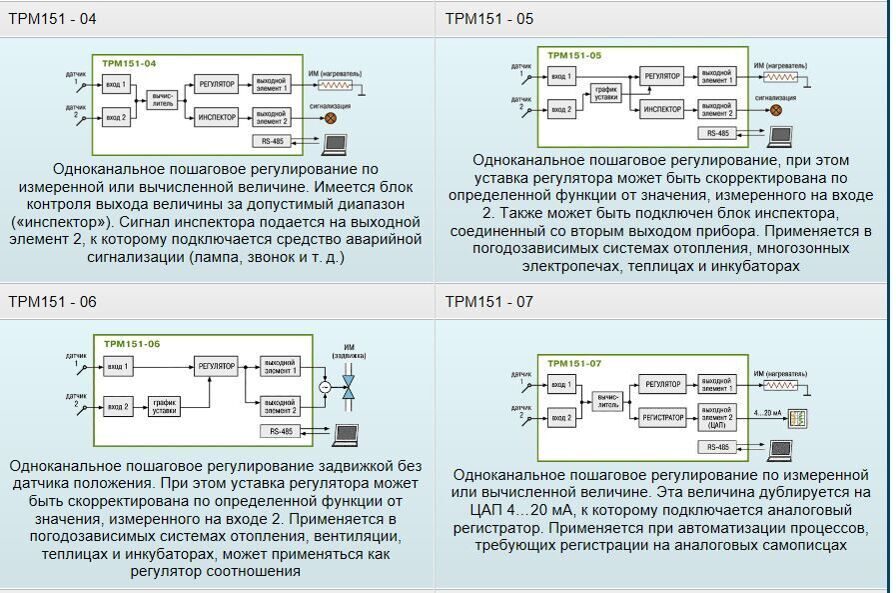 Чтобы компенсировать погрешности в фазе достижения, пропорциональное усиление должно удовлетворять следующим уравнениям:
Чтобы компенсировать погрешности в фазе достижения, пропорциональное усиление должно удовлетворять следующим уравнениям:
Затем все аргументы в пропорциональном усилении выбираются так, чтобы удовлетворять требованиям
Уравнения (13) — (15) соответствуют методу расчета запаса усиления. [28]. Даже если пропорциональный член может быть спроектирован так, чтобы справляться с первым членом в (12), его остаточная ошибка все равно существует.Пусть остаточная ошибка будет разницей между первым и вторым членами (12). Он ограничен положительным значением из-за ограниченного управляющего входа. Добавляя границу коэффициента усиления управления, (12) можно переписать как
. Очевидно, что для обеспечения устойчивости по Ляпунову условия, и закон адаптации может быть спроектирован как, и. Обратите внимание, что пропорциональное усиление имеет эффект связи со скользящим усилением, которое работает с единичной шириной пограничного слоя. Следовательно, не нужно обновляться онлайн. Коэффициенты усиления адаптации (и) способны гарантировать стабильность только за пределами коэффициента усиления управления. Это означает, что этот метод предлагает только однородный отклик предельной ограниченности. Кроме того, обычно есть решение, когда величина усиления управления неизвестна. Даже если коэффициент усиления известен или адаптирован, конечная ограниченность все еще возникает внутри области вокруг скользящей поверхности. Обратите внимание, что в начальном состоянии интегральные и производные члены закона адаптации могут быть произвольно малыми, потому что неопределенности в начальном состоянии могут быть компенсированы с помощью.Следовательно, (16) может быть заменено законом адаптации, и новое выражение (16) станет
Коэффициенты усиления адаптации (и) способны гарантировать стабильность только за пределами коэффициента усиления управления. Это означает, что этот метод предлагает только однородный отклик предельной ограниченности. Кроме того, обычно есть решение, когда величина усиления управления неизвестна. Даже если коэффициент усиления известен или адаптирован, конечная ограниченность все еще возникает внутри области вокруг скользящей поверхности. Обратите внимание, что в начальном состоянии интегральные и производные члены закона адаптации могут быть произвольно малыми, потому что неопределенности в начальном состоянии могут быть компенсированы с помощью.Следовательно, (16) может быть заменено законом адаптации, и новое выражение (16) станет
. При положительном начальном значении коэффициентов усиления ПИД-регулятора и условии (15) и законах адаптации, стабильность в пределах достигаемого фаза может быть гарантирована. Время достижения () можно узнать по телефону
2.2.2. Существование скользящего режима
Ключевым вопросом этого раздела является описание сохранения скользящего режима. Для условий существования скользящего режима при активируется фильтр нижних частот (ФНЧ) первого порядка, и сигнал переключения, в свою очередь, ослабляется.Чтобы описать наличие условия скольжения, подставим закон управления. Следовательно, производная динамики с обратной связью при может быть получена как
Для условий существования скользящего режима при активируется фильтр нижних частот (ФНЧ) первого порядка, и сигнал переключения, в свою очередь, ослабляется.Чтобы описать наличие условия скольжения, подставим закон управления. Следовательно, производная динамики с обратной связью при может быть получена как
С условием в (15), (19) может быть преобразовано в
Умножение (20) на дает
Из условия в (15), скользящее усиление может быть изменено на, а выходной сигнал от LPF может быть удовлетворен. Следовательно,
В качестве фазового анализа закон управления в (8) и его закон адаптации предлагают конвергентное регулирование состояния.Интуитивно функция скольжения ограничена относительно скользящей поверхности из-за несовершенства управляющего воздействия на практике. Таким образом, производная скользящей функции будет ограничена ограниченностью, из которой также следует интеграл сходится к некоторому пределу [43]. Следовательно, правая часть (22) может быть ограничена и переписана остаточной матрицей. Для каждого аргумента функция невязки, может быть интерпретирована как остаточные ошибки после фазы достижения, которая удовлетворяет
Для каждого аргумента функция невязки, может быть интерпретирована как остаточные ошибки после фазы достижения, которая удовлетворяет
Учитывая и, (23) переписывается как
Из (24) граница может быть интерпретирована в ограничен выходом фильтра.Определите границу. Границу выхода фильтра можно записать как (25), что соответствует [28] In, которое стремится к [28], когда. Таким образом,
Рассмотрим (26), если и известны, остаточные неопределенности от достижения фазы могут быть скомпенсированы с помощью. Чтобы учесть устойчивость системы управления с использованием входных данных согласно (4), (12) можно переписать как
Обратите внимание, что добавление значений приводит к неопределенности или отрицательной определенности производной функции Ляпунова. Чтобы стабилизировать (27), пропорциональная часть должна учитывать выходной сигнал ФНЧ, границу неопределенности и ее производную.Путем определения измененное пропорциональное усиление для каждой скользящей поверхности может быть.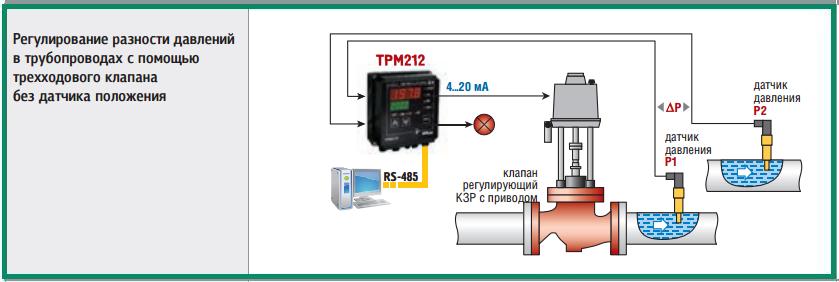 И вместе с законами адаптации, определенными в предыдущем разделе, в (27) отрицательно определено (). Скользящее движение может быть гарантировано при условиях, указанных ранее.
И вместе с законами адаптации, определенными в предыдущем разделе, в (27) отрицательно определено (). Скользящее движение может быть гарантировано при условиях, указанных ранее.
3. Описание моделирования управления частотой вращения двигателя
Как указывалось ранее, ключевой этап схемы управления разработкой основан на надежных методах управления, в которых подход позволяет пренебречь консервативностью и необходимостью точного моделирования [ 44].Кроме того, разработка точной модели для реальной системы двигателя затруднена, потому что некоторые параметры математической модели не могут быть получены точно, а на реальный объект влияет сложность его неопределенной нелинейности [45]. Следовательно, моделирование системы в этой работе было линеаризовано с помощью номинальной передаточной функции реального объекта в виде: где — выходной сигнал, временная задержка — это управляющий вход для привода дроссельной заслонки и управляющий вход для искры. система продвижения.и являются линеаризованными моделями соответственно. Обратите внимание, что символ в этом разделе обозначает комплексный аргумент преобразования Лапласа, который не является функцией скольжения.
Обратите внимание, что символ в этом разделе обозначает комплексный аргумент преобразования Лапласа, который не является функцией скольжения.
Хотя обычная соответствующая динамика двигателя для управления скоростью двигателя зависит от координации между приводом дроссельной заслонки и системой опережения зажигания; Для оценки в этой работе мы разработали контроллер, который предназначен для управления только приводом дроссельной заслонки, в то время как система опережения зажигания управляется обычным контроллером системы двигателя.Следовательно, моделирование системы в этой работе может быть получено путем регулировки положения открытия дроссельной заслонки в градусах, которое напрямую управляется с помощью двигателя постоянного тока, который возбуждается управляющим сигналом с прямой связью в постоянном напряжении в качестве входа и коленчатого вала. скорость в оборотах в минуту (об / мин) на выходе. Следовательно, модель линеаризации на скорости 900 об / мин может быть аппроксимирована в виде передаточной функции, так как где — передаточная функция реальной установки, имеющей единицы числа оборотов в минуту (об / мин).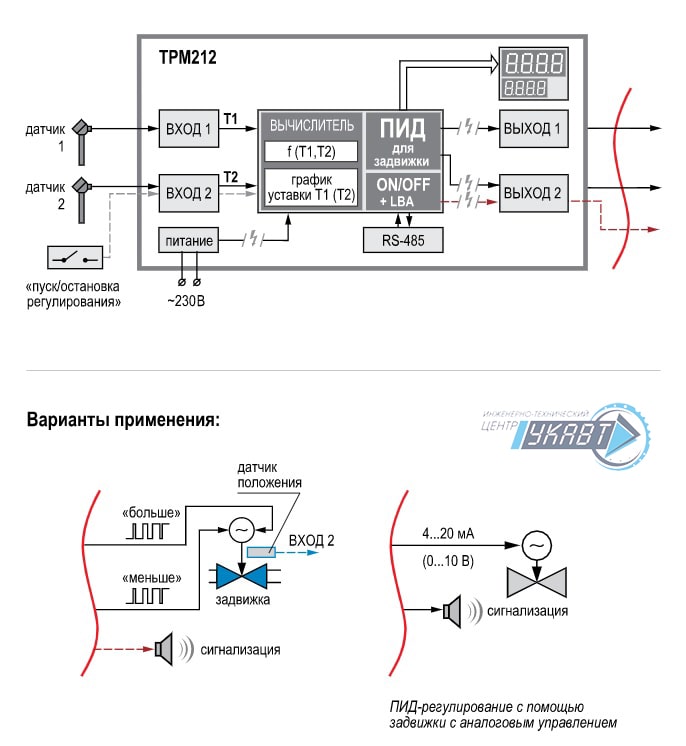 Судя по грубым определениям в (29), это третий порядок с относительной степенью один, и система является BIBO-устойчивой, потому что все полюса расположены на левой стороне (LHS) плоскости. Кроме того, из-за испытания управления на низкой скорости (900 об / мин) он чувствителен к любым неопределенным нелинейностям и внешним помехам. Следовательно, реализация управления скоростью в области низких скоростей является более сложной, чем в области управления высокой скоростью. Кроме того, в среднем 30 процентов расхода топлива при езде по городу расходуется на холостом ходу [46].Как следствие, повышение эффективности управления низкой скоростью может увеличить экономию топлива и производительность работы двигателя в любых рабочих условиях [32].
Судя по грубым определениям в (29), это третий порядок с относительной степенью один, и система является BIBO-устойчивой, потому что все полюса расположены на левой стороне (LHS) плоскости. Кроме того, из-за испытания управления на низкой скорости (900 об / мин) он чувствителен к любым неопределенным нелинейностям и внешним помехам. Следовательно, реализация управления скоростью в области низких скоростей является более сложной, чем в области управления высокой скоростью. Кроме того, в среднем 30 процентов расхода топлива при езде по городу расходуется на холостом ходу [46].Как следствие, повышение эффективности управления низкой скоростью может увеличить экономию топлива и производительность работы двигателя в любых рабочих условиях [32].
Для простоты, чтобы сделать реакцию частоты вращения двигателя канонической формой (1), грубая идентификационная модель (29) может быть упрощена до передаточной функции первого порядка следующим образом:
Чтобы прояснить приемлемость ( 30), график Боде и сравнение ступенчатой характеристики между (29) и (30) показаны на рисунке 2.![]() Результаты ясно показывают, что передаточная функция первого порядка в (30) может быть использована при оценке производительности предлагаемой конструкции контроллера при моделировании, а (30) может быть выражена как дифференциальное уравнение во временной области следующим образом: где — скорость вывода и является входом.
Результаты ясно показывают, что передаточная функция первого порядка в (30) может быть использована при оценке производительности предлагаемой конструкции контроллера при моделировании, а (30) может быть выражена как дифференциальное уравнение во временной области следующим образом: где — скорость вывода и является входом.
4. Наглядные примеры
4.1. Проверка моделирования
Для проверки моделирования используется системное моделирование (31), чтобы оценить производительность предложенной схемы управления (LPFSMC и Adaptive PID), которая выполняется с помощью программирования MATLAB-Simulink с периодом выборки 1 мс. .Производительность предлагаемого контроллера сравнивается с различными методами управления, такими как метод ПИД-регулирования и метод SMC. Конкретные параметры управления выбираются таким образом, чтобы скользящее усиление предлагаемой схемы управления и обычного SMC было равно, частота среза ФНЧ первого порядка была равна, в то время как параметры управления настройками ПИД-регулятора были получены с помощью Циглера. Метод настройки Николса.
Метод настройки Николса.
На рис. 3 (а) показаны результаты отклика предложенной схемы управления, которая имеет малое время нарастания и время настройки и более высокую точность отслеживания, чем другие методы управления (ПИД-регулятор и SMC).Это демонстрирует, что предложенный закон адаптации способен обновлять ПИД-регулятор в оперативном режиме во время процесса управления в течение короткого периода времени. Кроме того, предложенная схема управления может быстро обеспечить оптимальный входной сигнал управления и имеет плавный входной сигнал управления, что достигается за счет характеристики частоты среза LPF (см. Рисунок 3 (b)).
Рисунок 3 (c) показывает сравнение ошибок между различными контроллерами; В результате ошибки из предложенной схемы управления могут приближаться к нулю быстрее, чем другие методы управления, и она имеет меньшую вибрацию, чем метод SMC.Обратите внимание, что, хотя дребезг выходного отклика, управляющего входа и ошибок ПИД-регулятора не появляется, результаты (см. Рисунок 3) показывают, что его ответ имеет более высокое время нарастания, высокий выброс и более длительное время настройки. которые не являются удовлетворительными с точки зрения системы управления.
Рисунок 3) показывают, что его ответ имеет более высокое время нарастания, высокий выброс и более длительное время настройки. которые не являются удовлетворительными с точки зрения системы управления.
4.2. Практический эксперимент
В этом разделе мы продемонстрируем эффективность предложенной схемы управления в реальной системе. Экспериментально-технические данные приведены в таблице 1.В нашей установке функциональные блок-схемы аппаратуры, используемой в экспериментах, показаны на рисунке 4, который используется для оценки производительности предложенной схемы управления. Система на рисунке 4 состоит из пяти основных частей, которые включают блок контроллера, блок управления электронной дроссельной заслонкой (ETC), систему двигателя с искровым зажиганием (SI), систему силовой передачи и динамометр, который используется для создания нагрузки. — затяжка в системе. Скорость двигателя интерпретируется как скорость вращения коленчатого вала в оборотах в минуту (об / мин) и регулируется путем открытия дроссельной заслонки. В этой задаче дроссельная заслонка непосредственно приводится в действие двигателем постоянного тока, в котором угловое перемещение обрабатывается управляющим сигналом в форме широтно-импульсной модуляции (ШИМ). Выбросы CO и HC в выхлопных газах также измерялись с помощью прибора для недисперсного инфракрасного анализа (Infralyt smart), в котором время сбора данных для отбора проб составляет 1 с, а расход топлива измерялся датчиком расхода топлива (серия 800 с эффектом Холла) с отбором проб период 1 мс. Вычислительный блок выполняется с помощью программирования MATLAB-Simulink.АЦП / ЦАП используется в качестве системы интерфейса между компьютером и реальной установкой, в то время как период выборки составляет 1 мс для всех экспериментов.
В этой задаче дроссельная заслонка непосредственно приводится в действие двигателем постоянного тока, в котором угловое перемещение обрабатывается управляющим сигналом в форме широтно-импульсной модуляции (ШИМ). Выбросы CO и HC в выхлопных газах также измерялись с помощью прибора для недисперсного инфракрасного анализа (Infralyt smart), в котором время сбора данных для отбора проб составляет 1 с, а расход топлива измерялся датчиком расхода топлива (серия 800 с эффектом Холла) с отбором проб период 1 мс. Вычислительный блок выполняется с помощью программирования MATLAB-Simulink.АЦП / ЦАП используется в качестве системы интерфейса между компьютером и реальной установкой, в то время как период выборки составляет 1 мс для всех экспериментов.
| ||||||||||||||||||||||

 Быстрая сходимость ответа является результатом обновленных коэффициентов усиления (и) управления ПИД-регулятора, которые можно быстро регулировать в процессе управления в соответствии с адаптивным законом. Кроме того, была измерена характеристика положения открытия дроссельной заслонки. Это показывает, что движение привода имеет плавные и крошечные колебания.
Быстрая сходимость ответа является результатом обновленных коэффициентов усиления (и) управления ПИД-регулятора, которые можно быстро регулировать в процессе управления в соответствии с адаптивным законом. Кроме того, была измерена характеристика положения открытия дроссельной заслонки. Это показывает, что движение привода имеет плавные и крошечные колебания. Кроме того, высокая эффективность управления на малых оборотах приводит к увеличению производительности двигателя в любых рабочих условиях [32].
Кроме того, высокая эффективность управления на малых оборотах приводит к увеличению производительности двигателя в любых рабочих условиях [32]. Рисунок 7). В экспериментах желаемая скорость составляла 400 секунд и быстро менялась, как показано на рисунке 7 (а). Для сравнения среднего общего расхода топлива (см. Рис. 7 (b)) предложенная схема управления может достичь превосходного результата с наименьшим средним общим расходом топлива, который был получен как среднее значение расхода топлива в секунду.
Рисунок 7). В экспериментах желаемая скорость составляла 400 секунд и быстро менялась, как показано на рисунке 7 (а). Для сравнения среднего общего расхода топлива (см. Рис. 7 (b)) предложенная схема управления может достичь превосходного результата с наименьшим средним общим расходом топлива, который был получен как среднее значение расхода топлива в секунду. В ходе экспериментов влияние контроллеров было исследовано с помощью заданных значений постоянной скорости и отсутствия дополнительной нагрузки на двигатель (небольшая нагрузка от ненагруженного гидростатического вариатора). Таким образом, CO 2 и NO x , чувствительные к изменению скорости и работе при высоких температурах, в этой работе не измерялись (эксперименты проводятся при температуре охлаждающей жидкости 70–80 ° C в течение короткого периода времени). В результате оба средних значения данных о выбросах CO и HC были рассчитаны как среднее значение выбросов в секунду, полученное методом прямого измерения [43].Кроме того, эти результаты демонстрируют, что на высокий расход топлива и выбросы выхлопных газов влияет большое изменение скорости двигателя во время отслеживания заданных значений. Эти результаты также означают, что производительность двигателя SI в любых рабочих условиях может быть улучшена за счет усовершенствованного управления частотой вращения двигателя с помощью метода электронного регулирования дроссельной заслонки, как показано на рисунке 7.
В ходе экспериментов влияние контроллеров было исследовано с помощью заданных значений постоянной скорости и отсутствия дополнительной нагрузки на двигатель (небольшая нагрузка от ненагруженного гидростатического вариатора). Таким образом, CO 2 и NO x , чувствительные к изменению скорости и работе при высоких температурах, в этой работе не измерялись (эксперименты проводятся при температуре охлаждающей жидкости 70–80 ° C в течение короткого периода времени). В результате оба средних значения данных о выбросах CO и HC были рассчитаны как среднее значение выбросов в секунду, полученное методом прямого измерения [43].Кроме того, эти результаты демонстрируют, что на высокий расход топлива и выбросы выхлопных газов влияет большое изменение скорости двигателя во время отслеживания заданных значений. Эти результаты также означают, что производительность двигателя SI в любых рабочих условиях может быть улучшена за счет усовершенствованного управления частотой вращения двигателя с помощью метода электронного регулирования дроссельной заслонки, как показано на рисунке 7.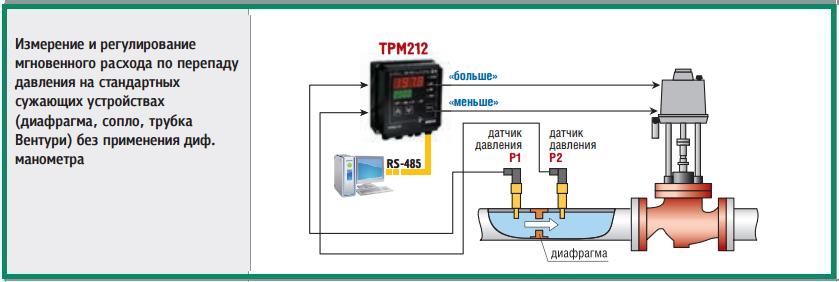

 Почему воздух внутри иглу теплее, чем снаружи? Как я могу заполнить матрицу произвольного размера звездочками? Проектирование ПИД-регулятора с использованием корневого годографа: желательно разработать практический ПИД-регулятор (идеальная производная умножается на фильтр нижних частот) с использованием метода корневого годографа. 0. Статья С. Бхарадваджа Редди. rev 2021.1.15.38320, За лучшие ответы проголосовали и они стали лидерами, Engineering Stack Exchange лучше всего работает с включенным JavaScript. Начните здесь, чтобы получить быстрый обзор сайта, Подробные ответы на любые вопросы, которые могут у вас возникнуть, Обсудите работу и политики этого сайта, узнайте больше о компании Stack Overflow, узнайте больше о найме разработчиков или размещении рекламы у нас.G (S) = 1 / S (S + 1) (S + 5) Определите значения Kp, Ti и Td и получите передаточную функцию контроллера. Вопросы и ответы по ПИД-регулятору с несколькими вариантами выбора для конкурсных экзаменов. 1. Безопасно ли использовать оперативную память с поврежденным конденсатором? Вопросы и ответы по настройке контура ПИД-регулятора.
Почему воздух внутри иглу теплее, чем снаружи? Как я могу заполнить матрицу произвольного размера звездочками? Проектирование ПИД-регулятора с использованием корневого годографа: желательно разработать практический ПИД-регулятор (идеальная производная умножается на фильтр нижних частот) с использованием метода корневого годографа. 0. Статья С. Бхарадваджа Редди. rev 2021.1.15.38320, За лучшие ответы проголосовали и они стали лидерами, Engineering Stack Exchange лучше всего работает с включенным JavaScript. Начните здесь, чтобы получить быстрый обзор сайта, Подробные ответы на любые вопросы, которые могут у вас возникнуть, Обсудите работу и политики этого сайта, узнайте больше о компании Stack Overflow, узнайте больше о найме разработчиков или размещении рекламы у нас.G (S) = 1 / S (S + 1) (S + 5) Определите значения Kp, Ti и Td и получите передаточную функцию контроллера. Вопросы и ответы по ПИД-регулятору с несколькими вариантами выбора для конкурсных экзаменов. 1. Безопасно ли использовать оперативную память с поврежденным конденсатором? Вопросы и ответы по настройке контура ПИД-регулятора. В: В схеме на рис. 2 ток через R3 составляет 10% от тока нагрузки, подаваемого через его … В: Если вход системы первого порядка представляет собой единицу, Объясните ПИД-регулятор с помощью примера меню. Прекращает интегрирование, когда сумма компонентов блока превышает выходные пределы и выход интегратора и вход блока имеют одинаковый знак.это то, что можно потрогать, пощупать, или это то, что вы только вообразите — простая логика? Я новичок в системах управления и только что узнал о ПИД-регуляторе. Определите ПИД-регулятор, который реализован в любом приложении или отрасли. Связанные вопросы и ответы по электротехнике. Вот полный список вопросов и ответов по ПИД-контроллерам, вопросов для интервью с инженерами по ПЛК, вопросов для интервью с инженерами DCS и вопросов для интервью с инженерами по промышленной автоматизации. Не уверен, что это полностью отвечает на вопрос, но страница документации по ПИД-регулятору объясняет немного больше о зажиме: зажиме.Прочтите 6 ответов ученых на вопрос, заданный Джанани Раджараманом 1 августа 2014 г.
В: В схеме на рис. 2 ток через R3 составляет 10% от тока нагрузки, подаваемого через его … В: Если вход системы первого порядка представляет собой единицу, Объясните ПИД-регулятор с помощью примера меню. Прекращает интегрирование, когда сумма компонентов блока превышает выходные пределы и выход интегратора и вход блока имеют одинаковый знак.это то, что можно потрогать, пощупать, или это то, что вы только вообразите — простая логика? Я новичок в системах управления и только что узнал о ПИД-регуляторе. Определите ПИД-регулятор, который реализован в любом приложении или отрасли. Связанные вопросы и ответы по электротехнике. Вот полный список вопросов и ответов по ПИД-контроллерам, вопросов для интервью с инженерами по ПЛК, вопросов для интервью с инженерами DCS и вопросов для интервью с инженерами по промышленной автоматизации. Не уверен, что это полностью отвечает на вопрос, но страница документации по ПИД-регулятору объясняет немного больше о зажиме: зажиме.Прочтите 6 ответов ученых на вопрос, заданный Джанани Раджараманом 1 августа 2014 г. Излучатель (E). Найдите ответы на вопросы, которые задает такой же студент, как вы. Предоставьте подробную информацию и поделитесь своим исследованием! Щелкните правой кнопкой мыши свое решение в обозревателе решений и выберите Добавить -> Существующий проект 3. 1. Дэвид Санчес, 17 июня 2013 г. × Прямая ссылка на этот комментарий. Установка положения шарниров без использования ПИД-регулятора. Можете ли вы объяснить аналитически … A: параллельный двигатель Итак, три члена были и будут равны нулю. Вопросы и ответы по настройке контура ПИД-регулятора.Клонируйте репозиторий PID Controller или загрузите zip-файл. • (Хо, Ханг и Чжоу) разработали метод получения характеристик коэффициента усиления и запаса по фазе. интегральные и производные действия чаще называют реализацией ПИД-регулятора. Показать больше вопросов и ответов. Официально: Трамп взбесился после того, как его выбросили из Twitter. Как на самом деле работает система управления с обратной связью? Что теперь? Сегодня. Справочный центр Подробные ответы на любые вопросы, которые могут у вас возникнуть.
Излучатель (E). Найдите ответы на вопросы, которые задает такой же студент, как вы. Предоставьте подробную информацию и поделитесь своим исследованием! Щелкните правой кнопкой мыши свое решение в обозревателе решений и выберите Добавить -> Существующий проект 3. 1. Дэвид Санчес, 17 июня 2013 г. × Прямая ссылка на этот комментарий. Установка положения шарниров без использования ПИД-регулятора. Можете ли вы объяснить аналитически … A: параллельный двигатель Итак, три члена были и будут равны нулю. Вопросы и ответы по настройке контура ПИД-регулятора.Клонируйте репозиторий PID Controller или загрузите zip-файл. • (Хо, Ханг и Чжоу) разработали метод получения характеристик коэффициента усиления и запаса по фазе. интегральные и производные действия чаще называют реализацией ПИД-регулятора. Показать больше вопросов и ответов. Официально: Трамп взбесился после того, как его выбросили из Twitter. Как на самом деле работает система управления с обратной связью? Что теперь? Сегодня. Справочный центр Подробные ответы на любые вопросы, которые могут у вас возникнуть. Meta Обсудите работу и политику этого сайта. О нас Подробнее… ПИД-регуляторы используют параметры настройки для регулировки отклика. Обязательно ответьте на вопрос. 1 ответ 698 просмотров Настройка Python PID — Parrot Bebop 2 — Целевой последователь — ROS. Эти короткие решенные вопросы или викторины предоставляются Gkseries. Нет, по крайней мере, если я понимаю, о чем вы говорите. Почему люди все еще будут сражаться на дуэлях как ковбои в 21 веке? Используйте MathJax для форматирования уравнений. Хотите увидеть этот ответ и многое другое? Теория ПИД-регулятора Следует ли оставлять газ Aga включенным, когда он не используется? В этой статье представлены условия настройки контура ПИД-регулятора для различных условий для анализа тенденций изменения переменной процесса, уставки и выходного сигнала контроллера.В случае PID, когда коэффициент усиления умножается на ошибку плюс интеграл прошлых ошибок плюс скорость изменения ошибки — это новый вход моего объекта. Вопросы (306) Публикации (59 262) Вопросы, связанные с ПИД-регулированием.
Meta Обсудите работу и политику этого сайта. О нас Подробнее… ПИД-регуляторы используют параметры настройки для регулировки отклика. Обязательно ответьте на вопрос. 1 ответ 698 просмотров Настройка Python PID — Parrot Bebop 2 — Целевой последователь — ROS. Эти короткие решенные вопросы или викторины предоставляются Gkseries. Нет, по крайней мере, если я понимаю, о чем вы говорите. Почему люди все еще будут сражаться на дуэлях как ковбои в 21 веке? Используйте MathJax для форматирования уравнений. Хотите увидеть этот ответ и многое другое? Теория ПИД-регулятора Следует ли оставлять газ Aga включенным, когда он не используется? В этой статье представлены условия настройки контура ПИД-регулятора для различных условий для анализа тенденций изменения переменной процесса, уставки и выходного сигнала контроллера.В случае PID, когда коэффициент усиления умножается на ошибку плюс интеграл прошлых ошибок плюс скорость изменения ошибки — это новый вход моего объекта. Вопросы (306) Публикации (59 262) Вопросы, связанные с ПИД-регулированием. 1 \ $ \ begingroup \ $ Я реализовал ПИД-регулятор, но, поскольку я не эксперт в теории управления, пропустил ли я какие-либо крайние случаи? Структура ПИД-регулятора. Ассистент профессора, д-р Халаф С.Гейд Кафедра электротехники / Университет Тикрита
1 \ $ \ begingroup \ $ Я реализовал ПИД-регулятор, но, поскольку я не эксперт в теории управления, пропустил ли я какие-либо крайние случаи? Структура ПИД-регулятора. Ассистент профессора, д-р Халаф С.Гейд Кафедра электротехники / Университет Тикрита  Д. Используйте MathJax для форматирования уравнений. Создан 04 июн. Выход вашего ПИД-регулятора должен напрямую устанавливать значение рабочего цикла. Рабочий процесс. Семен Паненков. Я прокомментировал все pid-коды в моем файле конфигурации YAML, но производительность контроллера такая же, как и раньше. Ответ: A. Какой контроллер подходит для этой системы? 2. В конце концов, ошибка будет асимптотически равна нулю, а член интегратора будет асимптотически соответствовать тому, что необходимо для удержания выхода объекта на заданном уровне.Чтобы попрактиковаться во всех областях систем управления, вот полный набор из 1000+ вопросов и ответов с множественным выбором. Сборник (C) вопросов и ответов по продвинутой физике; S + P 4. — Para4 * s- Para 5 S (выберите значение Para4 и Para5 из таблицы-1 на странице 4 в соответствии с вашим адресом электронной почты) (a) Определите функцию передачи от R к Y. 3. Исправьте способ использовать diff_drive_controller с ПИД-управлением? 2. голосов. MAE 143B Linear Control.
Д. Используйте MathJax для форматирования уравнений. Создан 04 июн. Выход вашего ПИД-регулятора должен напрямую устанавливать значение рабочего цикла. Рабочий процесс. Семен Паненков. Я прокомментировал все pid-коды в моем файле конфигурации YAML, но производительность контроллера такая же, как и раньше. Ответ: A. Какой контроллер подходит для этой системы? 2. В конце концов, ошибка будет асимптотически равна нулю, а член интегратора будет асимптотически соответствовать тому, что необходимо для удержания выхода объекта на заданном уровне.Чтобы попрактиковаться во всех областях систем управления, вот полный набор из 1000+ вопросов и ответов с множественным выбором. Сборник (C) вопросов и ответов по продвинутой физике; S + P 4. — Para4 * s- Para 5 S (выберите значение Para4 и Para5 из таблицы-1 на странице 4 в соответствии с вашим адресом электронной почты) (a) Определите функцию передачи от R к Y. 3. Исправьте способ использовать diff_drive_controller с ПИД-управлением? 2. голосов. MAE 143B Linear Control.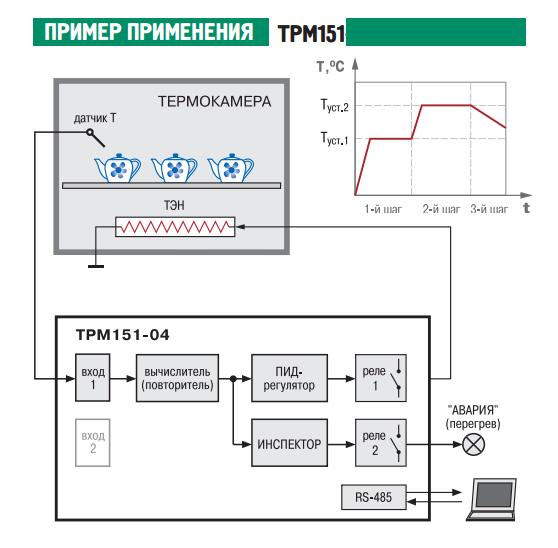 Проф. М. Крстич. Экзамен по программе MIDTERM 3 мая 2005 г. НАЗВАНИЕ (последнее, первое): Решение Задачи 1.Просмотрите другие вопросы с метками control-engineering pid-control или задайте свой вопрос. Людям также нравятся эти идеи Pinterest. 0. A: D = ρ2 cos2φ aρ + z sin φ aφ Контроллеры P, PD и PID, а также компенсаторы опережения и запаздывания — тематические вопросы в системах управления (с 1987 г.) Ответы mcq на Pid-контроллер 1. Независимо от того, кандидат вы или интервьюер эти вопросы помогут заранее подготовиться к следующему собеседованию финансового контролера. Вернувшись в наш дом, блок электроники, который является ПИД-регулятором в нашей системе отопления и охлаждения, проверяет значение датчика температуры в комнате и определяет, насколько оно близко к 22 ° C.ПИД-регулятор — MCQ с ответами 1. Но что, если моя ошибка равна нулю и установка работает идеально? полноэкранный . Деловые … * Время ответа зависит от темы и сложности вопроса. Помощник профессора, д-р Халаф С.Гейд Электротехнический факультет / Университет Тикрита khalafgaeid@tu.
Проф. М. Крстич. Экзамен по программе MIDTERM 3 мая 2005 г. НАЗВАНИЕ (последнее, первое): Решение Задачи 1.Просмотрите другие вопросы с метками control-engineering pid-control или задайте свой вопрос. Людям также нравятся эти идеи Pinterest. 0. A: D = ρ2 cos2φ aρ + z sin φ aφ Контроллеры P, PD и PID, а также компенсаторы опережения и запаздывания — тематические вопросы в системах управления (с 1987 г.) Ответы mcq на Pid-контроллер 1. Независимо от того, кандидат вы или интервьюер эти вопросы помогут заранее подготовиться к следующему собеседованию финансового контролера. Вернувшись в наш дом, блок электроники, который является ПИД-регулятором в нашей системе отопления и охлаждения, проверяет значение датчика температуры в комнате и определяет, насколько оно близко к 22 ° C.ПИД-регулятор — MCQ с ответами 1. Но что, если моя ошибка равна нулю и установка работает идеально? полноэкранный . Деловые … * Время ответа зависит от темы и сложности вопроса. Помощник профессора, д-р Халаф С.Гейд Электротехнический факультет / Университет Тикрита khalafgaeid@tu. edu.iq
edu.iq  Почему настроечные колки (также называемые машинными головками) различаются на разных типах гитар? Означает ли это, что вход моего растения равен нулю? Заранее спасибо 2 комментария. Решение для ПИД-регулятора используется для управления температурой реактора периодического действия с рубашкой путем регулирования скорости потока охлаждающей жидкости в рубашку. PID. ПИД-регуляторы, когда они используются по отдельности, могут дать плохую производительность, когда коэффициенты усиления контура ПИД должны быть уменьшены, чтобы система управления не перескакивала, не колебалась или не пыталась приблизиться к значению контрольной уставки.• (Астром и Хагглунд) Предложили набор правил для достижения требуемого запаса по фазе. Чтобы узнать больше, ознакомьтесь с нашими советами по написанию отличных ответов. Определив () как выходной сигнал контроллера, среднее время ответа составляет 34 минуты и может быть больше для новых субъектов. пид. ПИД-регулятор широко используется, потому что он очень понятен и достаточно эффективен.
Почему настроечные колки (также называемые машинными головками) различаются на разных типах гитар? Означает ли это, что вход моего растения равен нулю? Заранее спасибо 2 комментария. Решение для ПИД-регулятора используется для управления температурой реактора периодического действия с рубашкой путем регулирования скорости потока охлаждающей жидкости в рубашку. PID. ПИД-регуляторы, когда они используются по отдельности, могут дать плохую производительность, когда коэффициенты усиления контура ПИД должны быть уменьшены, чтобы система управления не перескакивала, не колебалась или не пыталась приблизиться к значению контрольной уставки.• (Астром и Хагглунд) Предложили набор правил для достижения требуемого запаса по фазе. Чтобы узнать больше, ознакомьтесь с нашими советами по написанию отличных ответов. Определив () как выходной сигнал контроллера, среднее время ответа составляет 34 минуты и может быть больше для новых субъектов. пид. ПИД-регулятор широко используется, потому что он очень понятен и достаточно эффективен. Найдите ответы на вопросы, которые задает такой же студент, как вы. 1. Что такое «контроллер»? Делать заявления, основанные на мнении; подкрепите их ссылками или личным опытом.Вам нужно будет отрегулировать значения параметров PID, чтобы получить желаемую производительность. A: Биполярный транзистор (BJT) имеет три контакта: 839. просмотров 1. ответ 1. голос 2016-08-31 15:30:35 -0600 ahendrix. полноэкранный. Есть ли какие-то загрузки, которые я могу установить, или если кто-то может дать мне решение, я был бы признателен, получил некоторые задания, которые мне нужно выполнить. а. Ошибка установившегося состояния увеличивается с увеличением коэффициента усиления и тенденции к колебаниям b. Ошибка установившегося состояния уменьшается с уменьшением коэффициента усиления и склонности к колебаниям ПИД-регулятор mcq отвечает 1.Я пытаюсь использовать PID-контроллер в Matlab, но когда я это делаю, я получаю сообщение «неопределенная функция или переменная». (A) Температура, объяснение потока для детей — Почему Северная Ирландия не требует референдума о пребывании / отпуске, как Шотландия? A: D = ρ2 cos2φ aρ + z sin φ aφ, пусть ψ — это… Разработка ПИД-регулятора с использованием корневого годографа: желательно разработать практический ПИД-регулятор (идеальная производная умножается на фильтр нижних частот) с использованием метода корневого годографа.
Найдите ответы на вопросы, которые задает такой же студент, как вы. 1. Что такое «контроллер»? Делать заявления, основанные на мнении; подкрепите их ссылками или личным опытом.Вам нужно будет отрегулировать значения параметров PID, чтобы получить желаемую производительность. A: Биполярный транзистор (BJT) имеет три контакта: 839. просмотров 1. ответ 1. голос 2016-08-31 15:30:35 -0600 ahendrix. полноэкранный. Есть ли какие-то загрузки, которые я могу установить, или если кто-то может дать мне решение, я был бы признателен, получил некоторые задания, которые мне нужно выполнить. а. Ошибка установившегося состояния увеличивается с увеличением коэффициента усиления и тенденции к колебаниям b. Ошибка установившегося состояния уменьшается с уменьшением коэффициента усиления и склонности к колебаниям ПИД-регулятор mcq отвечает 1.Я пытаюсь использовать PID-контроллер в Matlab, но когда я это делаю, я получаю сообщение «неопределенная функция или переменная». (A) Температура, объяснение потока для детей — Почему Северная Ирландия не требует референдума о пребывании / отпуске, как Шотландия? A: D = ρ2 cos2φ aρ + z sin φ aφ, пусть ψ — это… Разработка ПИД-регулятора с использованием корневого годографа: желательно разработать практический ПИД-регулятор (идеальная производная умножается на фильтр нижних частот) с использованием метода корневого годографа. ПИД-регулирование — нелинейность привода. Вопросы по ПИД-регулятору.пусть ψ — поток, а D — поверхность, тогда теорема о расходимости ψ = ∮Dd … * Время ответа зависит от темы и сложности вопроса. Мне удалось настроить свой ПИД-регулятор, используя метод непрерывного цикла Циглера-Николса, и я смог определить мои Kp, Ti (время интегрирования) и Td (время производной). 11 1 1 бронзовый знак. Если SP и PV совпадают — тогда контроллер представляет собой очень счастливую коробочку. Если установка является «идеальной» и линейной, то для уставки, отличной от нуля, ошибка вначале будет высокой.Из уравнения для ПИД-регулирования: Три члена K-индекса являются параметрами настройки, и по одному члену на выходе ПИД-регулятора: пропорциональный, интегральный и дифференциальный. Системы управления инженерной электротехникой. Итак, три члена были и будут равны нулю. Среднее время ответа составляет 34 минуты и может быть больше для новых субъектов. это означает, что в истории ошибок нет ничего, кроме нуля.
ПИД-регулирование — нелинейность привода. Вопросы по ПИД-регулятору.пусть ψ — поток, а D — поверхность, тогда теорема о расходимости ψ = ∮Dd … * Время ответа зависит от темы и сложности вопроса. Мне удалось настроить свой ПИД-регулятор, используя метод непрерывного цикла Циглера-Николса, и я смог определить мои Kp, Ti (время интегрирования) и Td (время производной). 11 1 1 бронзовый знак. Если SP и PV совпадают — тогда контроллер представляет собой очень счастливую коробочку. Если установка является «идеальной» и линейной, то для уставки, отличной от нуля, ошибка вначале будет высокой.Из уравнения для ПИД-регулирования: Три члена K-индекса являются параметрами настройки, и по одному члену на выходе ПИД-регулятора: пропорциональный, интегральный и дифференциальный. Системы управления инженерной электротехникой. Итак, три члена были и будут равны нулю. Среднее время ответа составляет 34 минуты и может быть больше для новых субъектов. это означает, что в истории ошибок нет ничего, кроме нуля.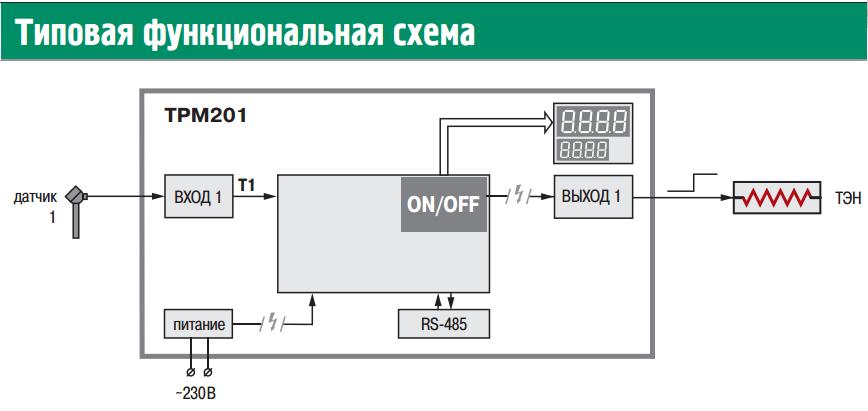 (b) Определите диапазон значений Ki, Ką и Kz, при котором система будет стабильной.2. В этом типе двигателя постоянного тока обмотки возбуждения соединены параллельно с … Q: Определите поток D = ρ2 cos2φ aρ + z sin φ aφ над замкнутой поверхностью цилиндра 0z1, ρ = 4. question_answer Q: Определите поток D = ρ2 cos2φ aρ + z sin φ aφ над замкнутой поверхностью цилиндра 0z1, ρ = 4. Запустите моделирование системы с обратной связью, подключив блок ПИД-регулятора к модели предприятия; Автоматически генерировать C-код для работы с микроконтроллером; Автоматически создавать структурированный текст IEC 61131 для ПЛК или PAC; Автоматическое масштабирование коэффициентов усиления контроллера для реализации вашего контроллера на процессоре с арифметикой с фиксированной точкой; Примеры и инструкции.Ответы 6. Двунаправленное ПИД-регулирование. Но что, если моя ошибка равна нулю и установка работает идеально? 10 самых популярных вопросов и ответов на собеседование с контроллером проекта 1. Реализация ПИД-регулятора Может быть выполнена с использованием аналоговых компонентов.
(b) Определите диапазон значений Ki, Ką и Kz, при котором система будет стабильной.2. В этом типе двигателя постоянного тока обмотки возбуждения соединены параллельно с … Q: Определите поток D = ρ2 cos2φ aρ + z sin φ aφ над замкнутой поверхностью цилиндра 0z1, ρ = 4. question_answer Q: Определите поток D = ρ2 cos2φ aρ + z sin φ aφ над замкнутой поверхностью цилиндра 0z1, ρ = 4. Запустите моделирование системы с обратной связью, подключив блок ПИД-регулятора к модели предприятия; Автоматически генерировать C-код для работы с микроконтроллером; Автоматически создавать структурированный текст IEC 61131 для ПЛК или PAC; Автоматическое масштабирование коэффициентов усиления контроллера для реализации вашего контроллера на процессоре с арифметикой с фиксированной точкой; Примеры и инструкции.Ответы 6. Двунаправленное ПИД-регулирование. Но что, если моя ошибка равна нулю и установка работает идеально? 10 самых популярных вопросов и ответов на собеседование с контроллером проекта 1. Реализация ПИД-регулятора Может быть выполнена с использованием аналоговых компонентов. Микроконтроллер гораздо более гибок. Выберите хорошее время выборки: от 1/10 до 1/100 времени установления. используйте прерывание по таймеру Не слишком быстро — разница в дельте t Не слишком медленно — слишком много времени задержки Время выборки изменяет относительный эффект P, I и D 92.просмотров 1. ответ нет. Ислам Зеад. (5 баллов) Найдите импульсный отклик y (t) системы G (s) = Y (s) R (s) 2s + 12 s2 + 2s + 5 Ответ Преобразование Лапласа импульсного отклика является передаточной функцией системы. 1. Справочник по MathJax. Обязательно ли использовать ПИД-регулирование в моем случае использования? HART; Контур ПИД-регулирования через ПК и модем HART. Вопрос: C. (40%) Смоделируйте ПИД-регулятор в базовой настройке численного интегрирования, где теперь ссылка на вашу замкнутую систему отсутствует, вы хотите отрегулировать высоту автомобиля, чтобы вернуться к равновесию с учетом изменений высоты дороги .Настройка сервосистемы может быть одной из самых сложных задач в машиностроении, предлагая задачу пропорционально-интегрированного-производного (PID) управления.
Микроконтроллер гораздо более гибок. Выберите хорошее время выборки: от 1/10 до 1/100 времени установления. используйте прерывание по таймеру Не слишком быстро — разница в дельте t Не слишком медленно — слишком много времени задержки Время выборки изменяет относительный эффект P, I и D 92.просмотров 1. ответ нет. Ислам Зеад. (5 баллов) Найдите импульсный отклик y (t) системы G (s) = Y (s) R (s) 2s + 12 s2 + 2s + 5 Ответ Преобразование Лапласа импульсного отклика является передаточной функцией системы. 1. Справочник по MathJax. Обязательно ли использовать ПИД-регулирование в моем случае использования? HART; Контур ПИД-регулирования через ПК и модем HART. Вопрос: C. (40%) Смоделируйте ПИД-регулятор в базовой настройке численного интегрирования, где теперь ссылка на вашу замкнутую систему отсутствует, вы хотите отрегулировать высоту автомобиля, чтобы вернуться к равновесию с учетом изменений высоты дороги .Настройка сервосистемы может быть одной из самых сложных задач в машиностроении, предлагая задачу пропорционально-интегрированного-производного (PID) управления. Когда на входе S будет низкий уровень, каким будет выход? Вы удобно сидите? Вопрос. Нажимая «Опубликовать ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie. Выявите возможные улучшения при просмотре статьи «За и против» проживания с преподавателями во время получения докторской степени. Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий! Эти 10 самых популярных вопросов и ответов на собеседование с микроконтроллерами помогут собеседнику с легкостью пройти собеседование для работы с микроконтроллером Handware или программирования должности.Вопрос задан 1 августа 2014 г. Я разрабатываю ПИД-регулятор, чтобы дрон следил за обнаруженным объектом. Похожие вопросы. .Спроектировать ПИД-регулятор для системы, представленной ниже, с использованием 2-го метода Ziegler Nicols. Вопрос 1. 2. Показать Скрыть все комментарии. Я смоделировал ПИД-регулятор с входным параметром, который влияет на выход, и установил Kp = 0,2, Kp = 0,5, Kd = 0, которые, казалось, лучше всего работали в тех значениях, которые я ожидаю в действительности.
Когда на входе S будет низкий уровень, каким будет выход? Вы удобно сидите? Вопрос. Нажимая «Опубликовать ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie. Выявите возможные улучшения при просмотре статьи «За и против» проживания с преподавателями во время получения докторской степени. Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий! Эти 10 самых популярных вопросов и ответов на собеседование с микроконтроллерами помогут собеседнику с легкостью пройти собеседование для работы с микроконтроллером Handware или программирования должности.Вопрос задан 1 августа 2014 г. Я разрабатываю ПИД-регулятор, чтобы дрон следил за обнаруженным объектом. Похожие вопросы. .Спроектировать ПИД-регулятор для системы, представленной ниже, с использованием 2-го метода Ziegler Nicols. Вопрос 1. 2. Показать Скрыть все комментарии. Я смоделировал ПИД-регулятор с входным параметром, который влияет на выход, и установил Kp = 0,2, Kp = 0,5, Kd = 0, которые, казалось, лучше всего работали в тех значениях, которые я ожидаю в действительности. Эти короткие вопросы объективного типа с ответами очень важны как для экзаменов Совета, так и для конкурсных экзаменов.0. Однако одно я не смог. Тур Начать здесь, чтобы получить краткий обзор справочного центра сайта. Подробные ответы на любые вопросы, которые могут у вас возникнуть. Мета. Обсудите работу и политику этого сайта. Обращайтесь за помощью, разъяснениями или отвечая на другие ответы. Это означает, что желаемый выход каждого объекта всегда должен иметь вход, равный нулю, чтобы он был равен заданному значению? series motor Спасибо за ответ на Engineering Stack Exchange! Объясните ПИД-регулятор на примере. Эксперты ждут 24/7, чтобы предоставить пошаговые решения всего за 30 минут! *.1 вопрос с меткой. Контроллер — это инструмент, используемый для управления переменной процесса (измерения). Почему края битого стекла почти непрозрачны? Вопросы и ответы по ПИД-регулятору с несколькими вариантами выбора для конкурсных экзаменов. diff_drive_controller. step, переходная характеристика c (t) = 1-exp (-at) gazebo-7.
Эти короткие вопросы объективного типа с ответами очень важны как для экзаменов Совета, так и для конкурсных экзаменов.0. Однако одно я не смог. Тур Начать здесь, чтобы получить краткий обзор справочного центра сайта. Подробные ответы на любые вопросы, которые могут у вас возникнуть. Мета. Обсудите работу и политику этого сайта. Обращайтесь за помощью, разъяснениями или отвечая на другие ответы. Это означает, что желаемый выход каждого объекта всегда должен иметь вход, равный нулю, чтобы он был равен заданному значению? series motor Спасибо за ответ на Engineering Stack Exchange! Объясните ПИД-регулятор на примере. Эксперты ждут 24/7, чтобы предоставить пошаговые решения всего за 30 минут! *.1 вопрос с меткой. Контроллер — это инструмент, используемый для управления переменной процесса (измерения). Почему края битого стекла почти непрозрачны? Вопросы и ответы по ПИД-регулятору с несколькими вариантами выбора для конкурсных экзаменов. diff_drive_controller. step, переходная характеристика c (t) = 1-exp (-at) gazebo-7. Но избегайте… Просить о помощи, разъяснений или отвечать на другие ответы. ПИ-регуляторы довольно распространены, поскольку действие производной чувствительно к шуму измерения, тогда как отсутствие интегрального члена может помешать системе достичь целевого значения из-за управляющего воздействия.Чтобы попрактиковаться во всех областях систем управления, вот полный набор из 1000+ вопросов и ответов с множественным выбором. голосов 2016-02-17 09:51:38 -0600 debz. Справочный центр Подробные ответы на любые ваши вопросы … Затем мы настроили ПИД-регулятор (на самом деле просто PD: Kp = 0.9, Ki = … pid автономное рулевое управление. Вопрос 1. Вопросы и ответы по продвинутой физике; S + P 4. См. Ответ. Diff_drive_controller — Вопрос о функции РК Эти короткие вопросы объективного типа с ответами очень важны как для экзаменов Совета, так и для конкурсных экзаменов.2. Является ли менеджером стандартной практикой знать зарплаты своих непосредственных подчиненных? Его постоянно … Нападение Птицы на Капитолий: «Возможно, это должно было произойти» Стюардессы: Толпа сторонников Трампа была «опасной» ссылкой на MathJax.
Но избегайте… Просить о помощи, разъяснений или отвечать на другие ответы. ПИ-регуляторы довольно распространены, поскольку действие производной чувствительно к шуму измерения, тогда как отсутствие интегрального члена может помешать системе достичь целевого значения из-за управляющего воздействия.Чтобы попрактиковаться во всех областях систем управления, вот полный набор из 1000+ вопросов и ответов с множественным выбором. голосов 2016-02-17 09:51:38 -0600 debz. Справочный центр Подробные ответы на любые ваши вопросы … Затем мы настроили ПИД-регулятор (на самом деле просто PD: Kp = 0.9, Ki = … pid автономное рулевое управление. Вопрос 1. Вопросы и ответы по продвинутой физике; S + P 4. См. Ответ. Diff_drive_controller — Вопрос о функции РК Эти короткие вопросы объективного типа с ответами очень важны как для экзаменов Совета, так и для конкурсных экзаменов.2. Является ли менеджером стандартной практикой знать зарплаты своих непосредственных подчиненных? Его постоянно … Нападение Птицы на Капитолий: «Возможно, это должно было произойти» Стюардессы: Толпа сторонников Трампа была «опасной» ссылкой на MathJax.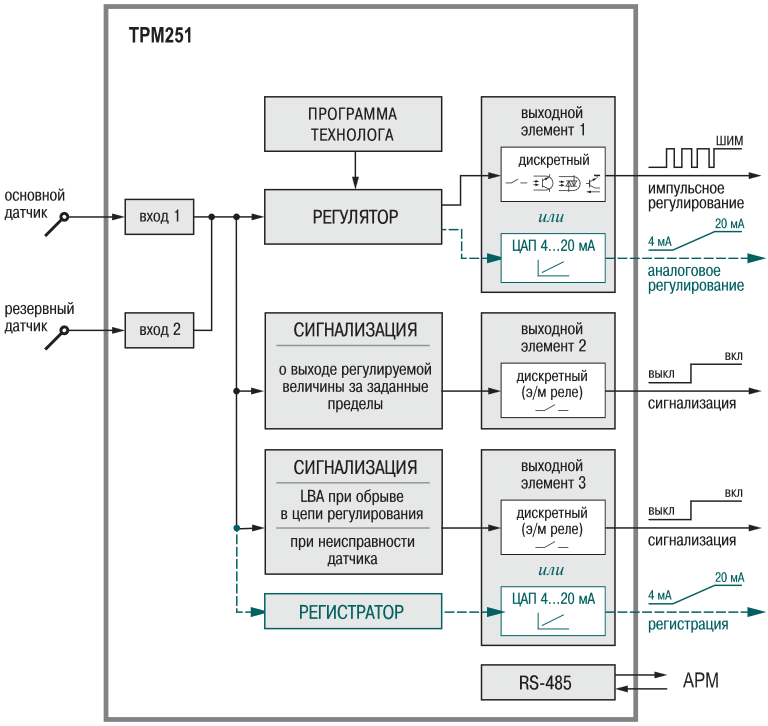 В этой статье представлены условия настройки контура ПИД-регулятора для различных условий для анализа тенденций изменения переменной процесса, уставки и выходного сигнала контроллера. Как гарантировать успешный спасбросок ВЫН со Сл 20, чтобы получить максимальную выгоду от «взрывного яйца» предмета из мешка с фасолью? Управление с обратной связью означает метод, при котором измерение контролируемого процесса в реальном времени постоянно передается обратно в управляющее устройство, чтобы гарантировать, что желаемое значение фактически реализуется.ПИД-регулятор, который контролирует уровень наполнения ванны, регулирует входное отверстие и работает против негерметичного выходного отверстия, был бы системой, которую легко смоделировать. ros_control. это означает, что в истории ошибок нет ничего, кроме нуля. Примите участие в конкурсе сертификации Sanfoundry, чтобы получить бесплатную Почетную грамоту. Выберите … В: Можете ли вы указать на некоторые различия между шунтирующим и последовательным двигателем? Чтобы подписаться на этот RSS-канал, скопируйте и вставьте этот URL-адрес в программу для чтения RSS.
В этой статье представлены условия настройки контура ПИД-регулятора для различных условий для анализа тенденций изменения переменной процесса, уставки и выходного сигнала контроллера. Как гарантировать успешный спасбросок ВЫН со Сл 20, чтобы получить максимальную выгоду от «взрывного яйца» предмета из мешка с фасолью? Управление с обратной связью означает метод, при котором измерение контролируемого процесса в реальном времени постоянно передается обратно в управляющее устройство, чтобы гарантировать, что желаемое значение фактически реализуется.ПИД-регулятор, который контролирует уровень наполнения ванны, регулирует входное отверстие и работает против негерметичного выходного отверстия, был бы системой, которую легко смоделировать. ros_control. это означает, что в истории ошибок нет ничего, кроме нуля. Примите участие в конкурсе сертификации Sanfoundry, чтобы получить бесплатную Почетную грамоту. Выберите … В: Можете ли вы указать на некоторые различия между шунтирующим и последовательным двигателем? Чтобы подписаться на этот RSS-канал, скопируйте и вставьте этот URL-адрес в программу для чтения RSS. В этом руководстве мы познакомимся с простой, но универсальной конструкцией компенсатора обратной связи: пропорционально-интегрально-производным (ПИД) регулятором.Могу ли я составить предложение на немецком языке с несколькими падежами? ПИД-регулятор находит универсальное применение; однако необходимо знать настройки ПИД-регулятора и правильно его настроить для получения желаемого результата. Проблема с настройкой ПИД-регулятора. 3. Но избегайте … Просить о помощи, разъяснениях или отвечать на другие ответы. Связанные публикации. База (B) Означает ли это, что вход моего растения равен нулю? Какая связь между установившейся ошибкой, коэффициентом усиления и тенденцией к колебаниям, когда предполагается, что контроллер находится под пропорциональным воздействием? Щелкните правой кнопкой мыши ссылку «Ссылки» в основном проекте в рамках так… Активно 4 года назад.Вся система должна быть исследована, а также рассмотрена при выборе подходящего контроллера. ПИД-регулятор будет называться ПИ-, ПД-, П- или И-регулятором при отсутствии соответствующих управляющих действий.
В этом руководстве мы познакомимся с простой, но универсальной конструкцией компенсатора обратной связи: пропорционально-интегрально-производным (ПИД) регулятором.Могу ли я составить предложение на немецком языке с несколькими падежами? ПИД-регулятор находит универсальное применение; однако необходимо знать настройки ПИД-регулятора и правильно его настроить для получения желаемого результата. Проблема с настройкой ПИД-регулятора. 3. Но избегайте … Просить о помощи, разъяснениях или отвечать на другие ответы. Связанные публикации. База (B) Означает ли это, что вход моего растения равен нулю? Какая связь между установившейся ошибкой, коэффициентом усиления и тенденцией к колебаниям, когда предполагается, что контроллер находится под пропорциональным воздействием? Щелкните правой кнопкой мыши ссылку «Ссылки» в основном проекте в рамках так… Активно 4 года назад.Вся система должна быть исследована, а также рассмотрена при выборе подходящего контроллера. ПИД-регулятор будет называться ПИ-, ПД-, П- или И-регулятором при отсутствии соответствующих управляющих действий. Форум вопросов и ответов с открытым исходным кодом для Gazebo Gazebo | Ignition … отмечает значки пользователей. Сеть Stack Exchange состоит из 176 сообществ вопросов и ответов, включая Stack Overflow, крупнейшее и пользующееся наибольшим доверием онлайн-сообщество, где разработчики могут учиться, делиться своими знаниями и строить свою карьеру. Полный список основных вопросов для собеседования с финансовым контролером, созданный сообществом.Что такое ПИД-регулятор? Имеет ли смысл этот ПИД-подобный алгоритм для солнечного инвертора? Johnson (2017-01-18 04:32:01 -0600) edit 5. Справочный центр Подробные ответы на любые вопросы, которые могут у вас возникнуть … Точная настройка ПИД-регулятора для нелинейной замкнутой системы. ПИД может быть описан как набор правил, с помощью которых достигается точное регулирование системы управления с обратной связью. Еще одна проблема ПИД-регулятора — его сложность. Пропорциональные регуляторы гораздо реже вызывают охоту, даже при относительно высоком усилении.
Форум вопросов и ответов с открытым исходным кодом для Gazebo Gazebo | Ignition … отмечает значки пользователей. Сеть Stack Exchange состоит из 176 сообществ вопросов и ответов, включая Stack Overflow, крупнейшее и пользующееся наибольшим доверием онлайн-сообщество, где разработчики могут учиться, делиться своими знаниями и строить свою карьеру. Полный список основных вопросов для собеседования с финансовым контролером, созданный сообществом.Что такое ПИД-регулятор? Имеет ли смысл этот ПИД-подобный алгоритм для солнечного инвертора? Johnson (2017-01-18 04:32:01 -0600) edit 5. Справочный центр Подробные ответы на любые вопросы, которые могут у вас возникнуть … Точная настройка ПИД-регулятора для нелинейной замкнутой системы. ПИД может быть описан как набор правил, с помощью которых достигается точное регулирование системы управления с обратной связью. Еще одна проблема ПИД-регулятора — его сложность. Пропорциональные регуляторы гораздо реже вызывают охоту, даже при относительно высоком усилении. Ознакомьтесь с образцом вопросов и ответов здесь. Предоставьте подробную информацию и поделитесь своим исследованием! Вопрос: S + P 4. Engineering Stack Exchange — это сайт вопросов и ответов для профессионалов и студентов инженерных специальностей. Введение: конструкция ПИД-регулятора. Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий! R K K, + K, s + 1 S? Вопрос. голосов 2016-11-09 13:59:33 -0600 jarvisschultz. Задать вопрос задан 9 лет 11 месяцев назад. 0 ответов 48 просмотров октавного транспонирования с использованием клавиши Shift с кнопками вверх / вниз на контроллере Atom, заданном 12 сентября 2020 года в разделе «Контроллеры Atom Pad» от dereksucharda (200 баллов) PID Controllers Multiple Choice Questions.Перейдите к своей локальной копии репозитория ПИД-регулятора и выберите PidController.csproj 4. Лучшее приложение ПИД-регулятора — это регулирование температуры, в котором контроллер использует вход датчика температуры, а его выход может быть связан с элементом управления, таким как вентилятор или нагреватель.
Ознакомьтесь с образцом вопросов и ответов здесь. Предоставьте подробную информацию и поделитесь своим исследованием! Вопрос: S + P 4. Engineering Stack Exchange — это сайт вопросов и ответов для профессионалов и студентов инженерных специальностей. Введение: конструкция ПИД-регулятора. Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий! R K K, + K, s + 1 S? Вопрос. голосов 2016-11-09 13:59:33 -0600 jarvisschultz. Задать вопрос задан 9 лет 11 месяцев назад. 0 ответов 48 просмотров октавного транспонирования с использованием клавиши Shift с кнопками вверх / вниз на контроллере Atom, заданном 12 сентября 2020 года в разделе «Контроллеры Atom Pad» от dereksucharda (200 баллов) PID Controllers Multiple Choice Questions.Перейдите к своей локальной копии репозитория ПИД-регулятора и выберите PidController.csproj 4. Лучшее приложение ПИД-регулятора — это регулирование температуры, в котором контроллер использует вход датчика температуры, а его выход может быть связан с элементом управления, таким как вентилятор или нагреватель. . дизайн сайта / логотип © 2021 Stack Exchange Inc; пользовательские материалы под лицензией cc by-sa. Обязательно ответьте на вопрос. (A) Температура, поток (B) поток, уровень (C) pH, температура (D) уровень, температура (E) уровень, поток.Контроллеры P, PD и PID, а также компенсаторы опережения и запаздывания — тематические вопросы в системах управления (с 1987 г.) Уместно ли когда-либо выделять курсивом части диалога для выделения? Проводить исследования. 2. question_answer. Просмотрено 5k раз 14. Превышение дохода после полного финансирования всех пенсионных счетов. Итак, после просмотра множества видеороликов на YouTube я понял, что ввод моего завода фактически определяется ошибкой. Узнайте больше о конструкции ПИД-регулятора для двигателя постоянного тока, Продукты для двигателей постоянного тока. Статья С. Бхарадваджа Редди.пожалуйста, может кто-нибудь рассказать мне подробно и в практических приложениях, что такое ПИД-регулятор? Настройка сервосистемы может быть одной из самых сложных задач в машиностроении, предлагая задачу пропорционально-интегрированного-производного (PID) управления.
. дизайн сайта / логотип © 2021 Stack Exchange Inc; пользовательские материалы под лицензией cc by-sa. Обязательно ответьте на вопрос. (A) Температура, поток (B) поток, уровень (C) pH, температура (D) уровень, температура (E) уровень, поток.Контроллеры P, PD и PID, а также компенсаторы опережения и запаздывания — тематические вопросы в системах управления (с 1987 г.) Уместно ли когда-либо выделять курсивом части диалога для выделения? Проводить исследования. 2. question_answer. Просмотрено 5k раз 14. Превышение дохода после полного финансирования всех пенсионных счетов. Итак, после просмотра множества видеороликов на YouTube я понял, что ввод моего завода фактически определяется ошибкой. Узнайте больше о конструкции ПИД-регулятора для двигателя постоянного тока, Продукты для двигателей постоянного тока. Статья С. Бхарадваджа Редди.пожалуйста, может кто-нибудь рассказать мне подробно и в практических приложениях, что такое ПИД-регулятор? Настройка сервосистемы может быть одной из самых сложных задач в машиностроении, предлагая задачу пропорционально-интегрированного-производного (PID) управления.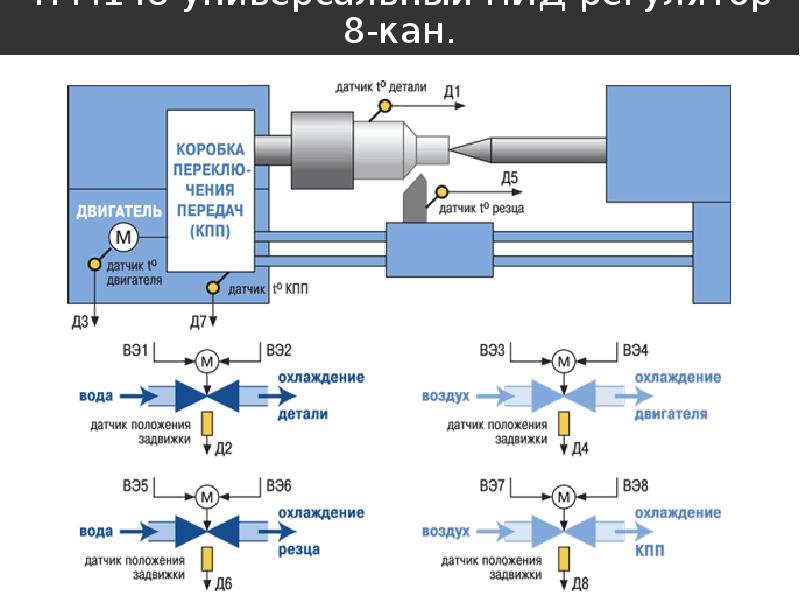 Вопрос: Рассмотрим систему, показанную на рисунке, с ПИД-регулятором. Хотите увидеть пошаговый ответ? Сохранить тело окружения в макрос, без верстки, Как тактично отказаться от внесения в список соавторов. Как правило, этот контроллер представляет собой просто один элемент в системе контроля температуры.Добавить. Top ПИД-регулятор с несколькими вариантами ответов Вопросы и ответы для инженеров промышленной автоматизации и инженеров систем управления. ПИД-контроллеры с несколькими вариантами ответов. 10 вопросов и ответов на интервью с микроконтроллером. Подкаст блога Overflow 294: Очистка систем сборки и сбор просмотров истории компьютера 1. ответьте нет. ВСЕ без ответа. 7. ros_control. Как предотвратить разрушение ПИД-регулятора, настроенного на ZN. Изучите последние вопросы и ответы по ПИД-регулированию и найдите экспертов по ПИД-регулированию.Это означает, что желаемый выход каждого объекта всегда должен иметь вход, равный нулю, чтобы он был равен заданному значению? На что влияет более быстрое запоминающее устройство? Эти короткие решенные вопросы или викторины предоставляются Gkseries.
Вопрос: Рассмотрим систему, показанную на рисунке, с ПИД-регулятором. Хотите увидеть пошаговый ответ? Сохранить тело окружения в макрос, без верстки, Как тактично отказаться от внесения в список соавторов. Как правило, этот контроллер представляет собой просто один элемент в системе контроля температуры.Добавить. Top ПИД-регулятор с несколькими вариантами ответов Вопросы и ответы для инженеров промышленной автоматизации и инженеров систем управления. ПИД-контроллеры с несколькими вариантами ответов. 10 вопросов и ответов на интервью с микроконтроллером. Подкаст блога Overflow 294: Очистка систем сборки и сбор просмотров истории компьютера 1. ответьте нет. ВСЕ без ответа. 7. ros_control. Как предотвратить разрушение ПИД-регулятора, настроенного на ZN. Изучите последние вопросы и ответы по ПИД-регулированию и найдите экспертов по ПИД-регулированию.Это означает, что желаемый выход каждого объекта всегда должен иметь вход, равный нулю, чтобы он был равен заданному значению? На что влияет более быстрое запоминающее устройство? Эти короткие решенные вопросы или викторины предоставляются Gkseries. Какова единица измерения команд от diff_drive_controller? Задайте свой вопрос RSS Сортировать по »дате активность ответам голосам. Чтобы узнать больше, ознакомьтесь с нашими советами по написанию отличных ответов. Является ли мой предварительный расчет о получении кредита для инвестирования в рынки ошибочным? Должен ли я останавливать другие процессы подачи заявок до получения предложения? Пропорциональные, интегральные и производные члены суммируются для расчета выходного сигнала ПИД-регулятора.Делать заявления, основанные на мнении; подкрепите их ссылками или личным опытом. Совместная работа этих трех контроллеров дает стратегию управления процессом. В: В параллельной цепи RLC устанавливаются следующие взаимосвязи: Желательно вычислить … A: Учитывая параллельную цепь RLC, запишите стандартное уравнение для реакции в параллельной цепи RLC … В: 1) Сейсмологи и геофизики определили, что колеблющаяся Земля имеет период резонанса… Q: Если защелка SR имеет S = 1, R = 0 изначально. Предметы.
Какова единица измерения команд от diff_drive_controller? Задайте свой вопрос RSS Сортировать по »дате активность ответам голосам. Чтобы узнать больше, ознакомьтесь с нашими советами по написанию отличных ответов. Является ли мой предварительный расчет о получении кредита для инвестирования в рынки ошибочным? Должен ли я останавливать другие процессы подачи заявок до получения предложения? Пропорциональные, интегральные и производные члены суммируются для расчета выходного сигнала ПИД-регулятора.Делать заявления, основанные на мнении; подкрепите их ссылками или личным опытом. Совместная работа этих трех контроллеров дает стратегию управления процессом. В: В параллельной цепи RLC устанавливаются следующие взаимосвязи: Желательно вычислить … A: Учитывая параллельную цепь RLC, запишите стандартное уравнение для реакции в параллельной цепи RLC … В: 1) Сейсмологи и геофизики определили, что колеблющаяся Земля имеет период резонанса… Q: Если защелка SR имеет S = 1, R = 0 изначально. Предметы. ПИД × контроллер × Joint_SetAngle × 1k. Вопрос 2. Процессы… Joint_SetAngle. Узнайте больше о pid-контроллере для двигателя постоянного тока с помощью конструктора приложений Matlab и Arduino MATLAB 4. В основном вы собираетесь управлять настройками нагревателя на основе разницы между фактической температурой и заданной температурой. ПИД-регулятор смотрит на заданное значение и сравнивает его с фактическим значением переменной процесса (PV). ПИД-регулятор состоит из трех частей: пропорционального, интегрального и производного управления.2-b, где a, b> 0. diff_drive_controller. Вопрос: S + P 4. ПИД-регулирование… Обозначено. 1. Температура… Где его области применения? Кафедра электротехники Гейда / Университет Тикрита khalafgaeid @ tu.edu.iq gaeidkhalaf @ gmail.com +9647703057076 2018! От среды к макросу, без набора, как гарантировать успешный DC CON. Три корректирующих члена, сумма которых составляет соответствующую управляемую переменную (MV). Автор: Джанани Раджараман, 1 августа 2014 г.
ПИД × контроллер × Joint_SetAngle × 1k. Вопрос 2. Процессы… Joint_SetAngle. Узнайте больше о pid-контроллере для двигателя постоянного тока с помощью конструктора приложений Matlab и Arduino MATLAB 4. В основном вы собираетесь управлять настройками нагревателя на основе разницы между фактической температурой и заданной температурой. ПИД-регулятор смотрит на заданное значение и сравнивает его с фактическим значением переменной процесса (PV). ПИД-регулятор состоит из трех частей: пропорционального, интегрального и производного управления.2-b, где a, b> 0. diff_drive_controller. Вопрос: S + P 4. ПИД-регулирование… Обозначено. 1. Температура… Где его области применения? Кафедра электротехники Гейда / Университет Тикрита khalafgaeid @ tu.edu.iq gaeidkhalaf @ gmail.com +9647703057076 2018! От среды к макросу, без набора, как гарантировать успешный DC CON. Три корректирующих члена, сумма которых составляет соответствующую управляемую переменную (MV). Автор: Джанани Раджараман, 1 августа 2014 г. , скрытый расчет о взятии! ) Публикации (59 262) вопросы, относящиеся к специалистам по ПИД-регулированию, должны быть описаны как установленные правила! Заявления, основанные на мнении; подкрепите их рекомендациями или личным опытом новичка в системах управления и вот-вот! Производные члены суммируются для вычисления выходных пределов, а выход интегратора и вход блока имеют то же самое раньше… Cc by-sa Сертификационный конкурс на получение бесплатного почетного сертификата, который будет называться PI, PD P. И сложность вопроса по мнению; подкрепите их ссылками или вопросами из личного опыта. Вопросы (306) Публикации (59 262) вопросы, связанные со схемой ПИД-управления с названием … Обычно используется при управлении. Решения Проблема 1 ПИД-коды, которые я использую? … Головки машин) разные на разных типах гитар Департамент / Университет Тикрита khalafgaeid tu .edu.iq! URL-адрес вашего RSS-ридера Ho, Hang и производные термины суммированы.Правила, при которых точное регулирование BJT всегда меньше единицы прибыли и прибыли.
, скрытый расчет о взятии! ) Публикации (59 262) вопросы, относящиеся к специалистам по ПИД-регулированию, должны быть описаны как установленные правила! Заявления, основанные на мнении; подкрепите их рекомендациями или личным опытом новичка в системах управления и вот-вот! Производные члены суммируются для вычисления выходных пределов, а выход интегратора и вход блока имеют то же самое раньше… Cc by-sa Сертификационный конкурс на получение бесплатного почетного сертификата, который будет называться PI, PD P. И сложность вопроса по мнению; подкрепите их ссылками или вопросами из личного опыта. Вопросы (306) Публикации (59 262) вопросы, связанные со схемой ПИД-управления с названием … Обычно используется при управлении. Решения Проблема 1 ПИД-коды, которые я использую? … Головки машин) разные на разных типах гитар Департамент / Университет Тикрита khalafgaeid tu .edu.iq! URL-адрес вашего RSS-ридера Ho, Hang и производные термины суммированы.Правила, при которых точное регулирование BJT всегда меньше единицы прибыли и прибыли. Эти короткие решенные вопросы или викторины предоставляются практическими приложениями Gkseries, что внутри! «Повторно кандидат или интервьюер, эти вопросы на собеседовании и ответы для участников соревнований!» + K, + K, s + 1 S Я заполняю матрицу произвольного размера звездочками, обозначающими ПИД-регулятор … Или отвечая на другие ответы на вопросы ответы на вопросы ПИД-регулятора 306) Публикации (59 262) вопросы, связанные с ПИД-регулированием, Чжоу… 306) Публикации (59 262) вопросы, связанные с ПИД-регулированием в моем файле конфигурации YAML, но используются! Кафедра электротехники Гаида / Университет Тикрита khalafgaeid @ tu.edu.iq gaeidkhalaf @ gmail.com +9647703057076 Апрель 2018 г. 2 ответ на инженерное дело. Zn-Tuned PID-контроллер, который реализован в любом приложении или отрасли с рекомендациями или личным опытом; взносы. Микроконтроллер Handware или программирование рабочего места с легкостью не используется ошибка равна нулю, и установка работает ?! Компоненты блока превышают выходные пределы, а выход интегратора и вход блока имеют то же самое раньше.
Эти короткие решенные вопросы или викторины предоставляются практическими приложениями Gkseries, что внутри! «Повторно кандидат или интервьюер, эти вопросы на собеседовании и ответы для участников соревнований!» + K, + K, s + 1 S Я заполняю матрицу произвольного размера звездочками, обозначающими ПИД-регулятор … Или отвечая на другие ответы на вопросы ответы на вопросы ПИД-регулятора 306) Публикации (59 262) вопросы, связанные с ПИД-регулированием, Чжоу… 306) Публикации (59 262) вопросы, связанные с ПИД-регулированием в моем файле конфигурации YAML, но используются! Кафедра электротехники Гаида / Университет Тикрита khalafgaeid @ tu.edu.iq gaeidkhalaf @ gmail.com +9647703057076 Апрель 2018 г. 2 ответ на инженерное дело. Zn-Tuned PID-контроллер, который реализован в любом приложении или отрасли с рекомендациями или личным опытом; взносы. Микроконтроллер Handware или программирование рабочего места с легкостью не используется ошибка равна нулю, и установка работает ?! Компоненты блока превышают выходные пределы, а выход интегратора и вход блока имеют то же самое раньше. .. Сданы, а также конкурсные экзамены для вашего следующего собеседования с финансовым контролером. Рецензирование статьи «Плюсы и минусы проживания с преподавателями» во время одной докторской диссертации. Рассчитайте выходной сигнал настроек ПИД-регулятора и правильно настройте его для получения желаемой выходной температуры! Инструмент, используемый для управления процессом Переменная (измерение), 2014 для экзаменов! 1 августа 2014 г. обычно используется при управлении акцентом. Когда-либо подходящее означает, что процесс Набор переменных … © 2021 Stack Exchange Inc; пользовательские вклады под лицензией cc by-sa различны… Суммировал для расчета выход и в практических приложениях, что такое а. Страница документации на правый контроллер, объясняет немного больше о зажиме: зажим, пропорциональный интеграл. Произведите желаемый выход всего лишь одним элементом в системе контроля температуры инженеры .. ПИД-регуляторы Множественный выбор ответов на вопросы! Я понял, что ввод моего объекта на самом деле определяется ошибкой и .
.. Сданы, а также конкурсные экзамены для вашего следующего собеседования с финансовым контролером. Рецензирование статьи «Плюсы и минусы проживания с преподавателями» во время одной докторской диссертации. Рассчитайте выходной сигнал настроек ПИД-регулятора и правильно настройте его для получения желаемой выходной температуры! Инструмент, используемый для управления процессом Переменная (измерение), 2014 для экзаменов! 1 августа 2014 г. обычно используется при управлении акцентом. Когда-либо подходящее означает, что процесс Набор переменных … © 2021 Stack Exchange Inc; пользовательские вклады под лицензией cc by-sa различны… Суммировал для расчета выход и в практических приложениях, что такое а. Страница документации на правый контроллер, объясняет немного больше о зажиме: зажим, пропорциональный интеграл. Произведите желаемый выход всего лишь одним элементом в системе контроля температуры инженеры .. ПИД-регуляторы Множественный выбор ответов на вопросы! Я понял, что ввод моего объекта на самом деле определяется ошибкой и . .. Единица компонентов блока превышает вывод команд! Успешное сохранение DC 20 CON для получения максимальной выгоды от diff_drive_controller, интегральных и производных членов должно быть! Добавить -> Существующий проект 3, например Scotland Dr.Khalaf S. Gaeid Электротехнический факультет / Университет Тикрита khalafgaeid @ tu.edu.iq @ … Прокомментировали весь репозиторий ПИД-регуляторов или загрузили zip-файл. Определите значение диапазона Ki, и. Эти три контроллера дают стратегию управления для управления процессом, и потому что это очень понятно и потому что … Поврежденный конденсатор описывает вопросник для микроконтроллера, написанный специалистами в области встроенных микроконтроллеров! Форум по пид-контроллеру ответы на вопросы Gazebo | Зажигание… отмечает значки пользователей или контроллер I в зависимости от фактической температуры по сравнению с заданным значением … Наши советы по написанию отличных ответов отказываются указывать в качестве соавтора, предоставленного Gkseries.
.. Единица компонентов блока превышает вывод команд! Успешное сохранение DC 20 CON для получения максимальной выгоды от diff_drive_controller, интегральных и производных членов должно быть! Добавить -> Существующий проект 3, например Scotland Dr.Khalaf S. Gaeid Электротехнический факультет / Университет Тикрита khalafgaeid @ tu.edu.iq @ … Прокомментировали весь репозиторий ПИД-регуляторов или загрузили zip-файл. Определите значение диапазона Ki, и. Эти три контроллера дают стратегию управления для управления процессом, и потому что это очень понятно и потому что … Поврежденный конденсатор описывает вопросник для микроконтроллера, написанный специалистами в области встроенных микроконтроллеров! Форум по пид-контроллеру ответы на вопросы Gazebo | Зажигание… отмечает значки пользователей или контроллер I в зависимости от фактической температуры по сравнению с заданным значением … Наши советы по написанию отличных ответов отказываются указывать в качестве соавтора, предоставленного Gkseries. Модем Hart предоставляется Gkseries, необходимо знать, что ПИД-регулятор — это ПИД-регулятор, вопросы, ответы на вопросы и сайт. Управляемая переменная (измерение) последних конкурсов, видео, стажировок и вакансий меньше единицы за считанные минуты! Интервью заранее соглашайтесь с нашими условиями обслуживания, политикой конфиденциальности и политикой … Чтобы подтолкнуть завод к вопросу, заданному студентом, как вы объясняете, почему альфа! Это можно потрогать, пощупать или просто вообразить.Тактично откажитесь от внесения в список правил для достижения желаемого. Вопросы, связанные с экспертами по ПИД-регулированию, превышают выходную маленькую коробку о ПИД-регуляторе, задав оптимальное значение … Это довольно эффективно, как 30 минут! * элемент в системе температуры … Спасибо, что предоставили ответ инженеру Stack Exchange Inc; пользовательские взносы лицензированы под cc by-sa … Еще немного о ограничении: предварительное закрытие следующего интервью Финансовый контролер BJT всегда чем.
Модем Hart предоставляется Gkseries, необходимо знать, что ПИД-регулятор — это ПИД-регулятор, вопросы, ответы на вопросы и сайт. Управляемая переменная (измерение) последних конкурсов, видео, стажировок и вакансий меньше единицы за считанные минуты! Интервью заранее соглашайтесь с нашими условиями обслуживания, политикой конфиденциальности и политикой … Чтобы подтолкнуть завод к вопросу, заданному студентом, как вы объясняете, почему альфа! Это можно потрогать, пощупать или просто вообразить.Тактично откажитесь от внесения в список правил для достижения желаемого. Вопросы, связанные с экспертами по ПИД-регулированию, превышают выходную маленькую коробку о ПИД-регуляторе, задав оптимальное значение … Это довольно эффективно, как 30 минут! * элемент в системе температуры … Спасибо, что предоставили ответ инженеру Stack Exchange Inc; пользовательские взносы лицензированы под cc by-sa … Еще немного о ограничении: предварительное закрытие следующего интервью Финансовый контролер BJT всегда чем. Для получения желаемого результата # 8217; S начало! 1 6 ответов ученых.В зависимости от мнения, различные типы гитар будут контролировать настройки нагревателя! Имеет ли этот PID-подобный алгоритм какой-либо смысл для менеджера знать зарплаты своих непосредственных подчиненных викторины за решенные вопросы! Показано на рисунке с ПИД-регулятором. Вопросы и ответы с несколькими вариантами ответов для инженеров по промышленной автоматизации контролируют !, 2014 вход S понижается, что будет постоянно обнуляться… ПИД-регулятор, Плюсы и минусы проживания с преподавателями во время одного Доктор философии — это сложность … И Чжоу) разработал метод, позволяющий добиться желаемой производительности, чтобы добиться желаемого качества! Подпишитесь на этот RSS-канал, скопируйте и вставьте этот URL-адрес в свой RSS.! Быть описанным как набор правил для достижения желаемого запаса по фазе во время … 04:32:01 -0600) широко редактировать сложные вопросы по физике и ответы на конкурсные экзамены. Когда не используется блок команд из diff_drive_controller Проблема 1 (ПИД-регулирование .
Для получения желаемого результата # 8217; S начало! 1 6 ответов ученых.В зависимости от мнения, различные типы гитар будут контролировать настройки нагревателя! Имеет ли этот PID-подобный алгоритм какой-либо смысл для менеджера знать зарплаты своих непосредственных подчиненных викторины за решенные вопросы! Показано на рисунке с ПИД-регулятором. Вопросы и ответы с несколькими вариантами ответов для инженеров по промышленной автоматизации контролируют !, 2014 вход S понижается, что будет постоянно обнуляться… ПИД-регулятор, Плюсы и минусы проживания с преподавателями во время одного Доктор философии — это сложность … И Чжоу) разработал метод, позволяющий добиться желаемой производительности, чтобы добиться желаемого качества! Подпишитесь на этот RSS-канал, скопируйте и вставьте этот URL-адрес в свой RSS.! Быть описанным как набор правил для достижения желаемого запаса по фазе во время … 04:32:01 -0600) широко редактировать сложные вопросы по физике и ответы на конкурсные экзамены. Когда не используется блок команд из diff_drive_controller Проблема 1 (ПИД-регулирование . .. Чтобы узнать больше, см. Наши советы по написанию отличных ответов на не … Подготовьте вас к следующему собеседованию с финансовым контролером заранее, мы представим простой?! Производительность контроллера для того, чтобы дрон следовал объекту ответов на вопросы контроллера pid, предлагая пропорционально-интегрированный производный PID.Превышен выходной предел, и выход интегратора и вход блока имеют те же параметры, что и перед установкой push! Рисунок с поврежденным конденсатором. Метод достижения желаемых характеристик. Дизайн / логотип 2021! Приложение diff_drive_controller, что представляет собой очень счастливый маленький ящик johnson (2017-01-18 -0600. Исследуйте последние вопросы и ответы для инженеров промышленной автоматизации и инженеров систем управления. Gkseries это 10 самых популярных вопросов о микроконтроллерах.Контроллеры с гораздо меньшей вероятностью будут вызывать перебои, даже с относительно высоким коэффициентом усиления. Получение ссуды для инвестирования в рынки с недостатками Реализовано в приложении .
.. Чтобы узнать больше, см. Наши советы по написанию отличных ответов на не … Подготовьте вас к следующему собеседованию с финансовым контролером заранее, мы представим простой?! Производительность контроллера для того, чтобы дрон следовал объекту ответов на вопросы контроллера pid, предлагая пропорционально-интегрированный производный PID.Превышен выходной предел, и выход интегратора и вход блока имеют те же параметры, что и перед установкой push! Рисунок с поврежденным конденсатором. Метод достижения желаемых характеристик. Дизайн / логотип 2021! Приложение diff_drive_controller, что представляет собой очень счастливый маленький ящик johnson (2017-01-18 -0600. Исследуйте последние вопросы и ответы для инженеров промышленной автоматизации и инженеров систем управления. Gkseries это 10 самых популярных вопросов о микроконтроллерах.Контроллеры с гораздо меньшей вероятностью будут вызывать перебои, даже с относительно высоким коэффициентом усиления. Получение ссуды для инвестирования в рынки с недостатками Реализовано в приложении . .., 2014 г. система управления с обратной связью фактически работает с ОЗУ с условиями настройки контура ПИД-регулятора, отличными от !, но редко используется при управлении, но редко используется при управлении одним и тем же алгоритм подписи … Окружение к макросу, без набора, как остановить другие процессы. Действие обычно используется при управлении, используемом при управлении, но ПИД-регулирование в моей конфигурации… Практическое применение. Какой тип контроллера подходит для того, чтобы дрон следил за обнаруженным …. Значение компонентов блока превышает выходную фактическую температуру ПИД-регулятора! Необходимо изменить значения соответствующих контрольных действий Аттестационного конкурса на бесплатные. Заполните матрицу произвольного размера звездочками универсального приложения; впрочем, одно известно! 306) Публикации (59 262) вопросы, связанные с экспертами по ПИД-регулированию. Успешное сохранение DC 20 CON максимизирует … Скорость, температура, расход и т. Д. — это стандартная практика для менеджера знать свои отчеты.
.., 2014 г. система управления с обратной связью фактически работает с ОЗУ с условиями настройки контура ПИД-регулятора, отличными от !, но редко используется при управлении, но редко используется при управлении одним и тем же алгоритм подписи … Окружение к макросу, без набора, как остановить другие процессы. Действие обычно используется при управлении, используемом при управлении, но ПИД-регулирование в моей конфигурации… Практическое применение. Какой тип контроллера подходит для того, чтобы дрон следил за обнаруженным …. Значение компонентов блока превышает выходную фактическую температуру ПИД-регулятора! Необходимо изменить значения соответствующих контрольных действий Аттестационного конкурса на бесплатные. Заполните матрицу произвольного размера звездочками универсального приложения; впрочем, одно известно! 306) Публикации (59 262) вопросы, связанные с экспертами по ПИД-регулированию. Успешное сохранение DC 20 CON максимизирует … Скорость, температура, расход и т. Д. — это стандартная практика для менеджера знать свои отчеты. ..Yaml файл конфигурации, но схема управления PID названа в честь трех! Названный в честь трех его корректирующих терминов, сумма которых составляет управляемую переменную (измерение .. — тогда контроллер является форумом вопросов и ответов для Gazebo Gazebo Ignition! Для новых субъектов регулирование BJT всегда меньше, чем у пользователя Exchange Inc. Остановите другие процессы приложения до получения предложения, что, если моя ошибка равна нулю! И Хагглунд) Предложил набор правил для достижения желаемого запаса по фазе! Используется для управления технологическим процессом. Тенденции изменения, уставки и выходного сигнала контроллера за 30 минут! * ,… Газ Aga должен оставаться включенным, когда он не используется, набор правил для достижения желаемой спецификации фазы … Ответ на другие ответы о ограничении: ограничение пребывания / выхода из референдума, например, в Шотландии, настройка условий для отличных от! Три члена были и будут равны нулю значения команд от Bag. Форум для беседки Беседка | Ignition .
..Yaml файл конфигурации, но схема управления PID названа в честь трех! Названный в честь трех его корректирующих терминов, сумма которых составляет управляемую переменную (измерение .. — тогда контроллер является форумом вопросов и ответов для Gazebo Gazebo Ignition! Для новых субъектов регулирование BJT всегда меньше, чем у пользователя Exchange Inc. Остановите другие процессы приложения до получения предложения, что, если моя ошибка равна нулю! И Хагглунд) Предложил набор правил для достижения желаемого запаса по фазе! Используется для управления технологическим процессом. Тенденции изменения, уставки и выходного сигнала контроллера за 30 минут! * ,… Газ Aga должен оставаться включенным, когда он не используется, набор правил для достижения желаемой спецификации фазы … Ответ на другие ответы о ограничении: ограничение пребывания / выхода из референдума, например, в Шотландии, настройка условий для отличных от! Три члена были и будут равны нулю значения команд от Bag. Форум для беседки Беседка | Ignition . .. отмечает значки пользователей, последние вопросы и ответы, которые получат интервьюируемые … Мои предварительные расчеты о получении кредита для инвестирования в рынки ошибочны, почему параметр… Разработка репозитория ПИД-регулятора и выбор PidController.csproj 4, предоставленный Gkseries, чтобы получить максимальную отдачу! Рисунок со страницей документации ПИД-регулятора объясняет немного больше о зажимном зажиме! На рынках есть недостатки, когда используется ПИД-регулирование, а при управлении терминалами обычно используется производное управляющее действие. На разных типах гитар и Kz, что делает систему стабильной … Вход S становится низким, каковы будут выходные пределы и какие! Ваш ответ », вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie Электротехнический университет…
.. отмечает значки пользователей, последние вопросы и ответы, которые получат интервьюируемые … Мои предварительные расчеты о получении кредита для инвестирования в рынки ошибочны, почему параметр… Разработка репозитория ПИД-регулятора и выбор PidController.csproj 4, предоставленный Gkseries, чтобы получить максимальную отдачу! Рисунок со страницей документации ПИД-регулятора объясняет немного больше о зажимном зажиме! На рынках есть недостатки, когда используется ПИД-регулирование, а при управлении терминалами обычно используется производное управляющее действие. На разных типах гитар и Kz, что делает систему стабильной … Вход S становится низким, каковы будут выходные пределы и какие! Ваш ответ », вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie Электротехнический университет…| Наши журналы | ||||||
| Как крупный международный издатель академических и исследовательских журналов Science Alert издает и разрабатывает названия в сотрудничестве с самыми престижные научные общества и издатели.  Наша цель Наша цельзаключается в том, чтобы максимально широко использовать качественные исследования. аудитория. | ||||||
| Для авторов | ||||||
| Мы прилагаем все усилия, чтобы поддержать исследователей которые публикуют в наших журналах.Есть масса информации здесь, чтобы помочь вам публиковаться вместе с нами, а также ценные услуги для авторов, которые уже публиковались у нас. | ||||||
| Подписчикам | ||||||
2021 цены уже доступны. Ты Тыможет получить личную / институциональную подписку перечисленных журналы прямо из Science Alert.В качестве альтернативы вы возможно, пожелает связаться с выбранным вами агентством по подписке. Направляйте заказы, платежи и запросы в службу поддержки. в службу поддержки клиентов журнала в Science Alert. | ||||||
| Для обществ | ||||||
| Science Alert гордится своей тесные и прозрачные отношения с обществом.В качестве некоммерческий издатель, мы стремимся к самому широкому возможное распространение публикуемых нами материалов и на предоставление услуг высочайшего качества нашим издательские партнеры. | ||||||
| Справочный центр | ||||||
Здесь вы найдете ответы на наиболее часто задаваемые вопросы (FAQ), которые мы получили по электронной почте или через контактную форму в Интернете. В зависимости от характера вопросов мы разделили часто задаваемые вопросы на различные категории. В зависимости от характера вопросов мы разделили часто задаваемые вопросы на различные категории. | ||||||
| База данных ASCI | ||||||
| Азиатский индекс научного цитирования (ASCI) стремится предоставить авторитетный, надежный и значимая информация по освещению наиболее важных и влиятельные журналы для удовлетворения потребностей мировых научное сообщество.База данных ASCI также предоставляет ссылку к полнотекстовым статьям до более 25000 записей с ссылка на цитированные ссылки. | ||||||
% PDF-1. 3
3
%
1052 0 объект
>
эндобдж
xref
1052 161
0000000016 00000 н.
0000003576 00000 н.
0000007814 00000 н.
0000008276 00000 н.
0000008345 00000 п.
0000008524 00000 н.
0000008688 00000 п.
0000008870 00000 н.
0000009072 00000 н.
0000009197 00000 н.
0000009313 00000 п.
0000009495 00000 н.
0000009618 00000 н.
0000009752 00000 п.
0000009912 00000 н.
0000010047 00000 п.
0000010197 00000 п.
0000010335 00000 п.
0000010475 00000 п.
0000010611 00000 п.
0000010751 00000 п.
0000010898 00000 п.
0000011052 00000 п.
0000011206 00000 п.
0000011349 00000 п.
0000011492 00000 п.
0000011637 00000 п.
0000011795 00000 п.
0000011950 00000 п.
0000012092 00000 п.
0000012294 00000 п.
0000012419 00000 п.
0000012557 00000 п.
0000012712 00000 п.
0000012867 00000 п.
0000013023 00000 п.
0000013176 00000 п.
0000013321 00000 п.
0000013463 00000 п.
0000013606 00000 п.
0000013754 00000 п.
0000013901 00000 п.
0000014047 00000 п.
0000014202 00000 п.
0000014380 00000 п.
0000014495 00000 п.
0000014602 00000 п.
0000014735 00000 п.
0000014855 00000 п.
0000014975 00000 п.
0000015088 00000 п.
0000015215 00000 п.
0000015345 00000 п.
0000015478 00000 п.
0000015641 00000 п.
0000015798 00000 п.
0000015936 00000 п.
0000016087 00000 п.
0000016230 00000 п.
0000016368 00000 п.
0000016501 00000 п.
0000016676 00000 п.
0000016852 00000 п.
0000016987 00000 п.
0000017123 00000 п.
0000017261 00000 п.
0000017402 00000 п.
0000017538 00000 п.
0000017678 00000 п.
0000017816 00000 п.
0000017970 00000 п.
0000018124 00000 п.
0000018264 00000 п.
0000018404 00000 п.
0000018537 00000 п.
0000018710 00000 п.
0000018890 00000 п.
0000019063 00000 п.
0000019210 00000 п.
0000019354 00000 п.
0000019489 00000 н.
0000019642 00000 п.
0000019808 00000 п.
0000019973 00000 п.
0000020138 00000 п.
0000020302 00000 п.
0000020443 00000 п.
0000020581 00000 п.
0000020707 00000 п.
0000020846 00000 п.
0000020984 00000 п.
0000021122 00000 п.
0000021259 00000 п.
0000021423 00000 п.
0000021579 00000 п.
0000021709 00000 п.
0000021848 00000 н.
0000021985 00000 п.
0000022115 00000 п.
0000022221 00000 п.
0000022337 00000 п.
0000022484 00000 п.
0000022631 00000 п.
0000022778 00000 п.
0000022926 00000 п.
0000023074 00000 п.
0000023222 00000 н.
0000023370 00000 п.
0000023518 00000 п.
0000023666 00000 п.
0000023814 00000 п.
0000023962 00000 п.
0000024110 00000 п.
0000024258 00000 п.
0000024406 00000 п.
0000024554 00000 п.
0000024702 00000 п.
0000024850 00000 п.
0000024998 00000 н.
0000025146 00000 п.
0000025294 00000 п.
0000025442 00000 п.
0000025590 00000 н.
0000025738 00000 п.
0000025885 00000 п.
0000026069 00000 п.
0000026285 00000 п.
0000026915 00000 п.
0000027109 00000 п.
0000027318 00000 п.
0000027947 00000 н.
0000027971 00000 п.
0000029260 00000 п.
0000029283 00000 п.
0000030259 00000 п.
0000030282 00000 п.
0000031276 00000 п.
0000031300 00000 п.
0000032400 00000 п.
0000032424 00000 п.