
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
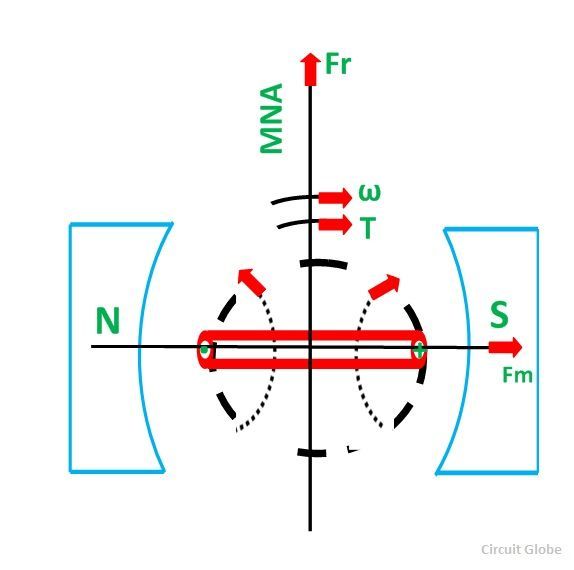
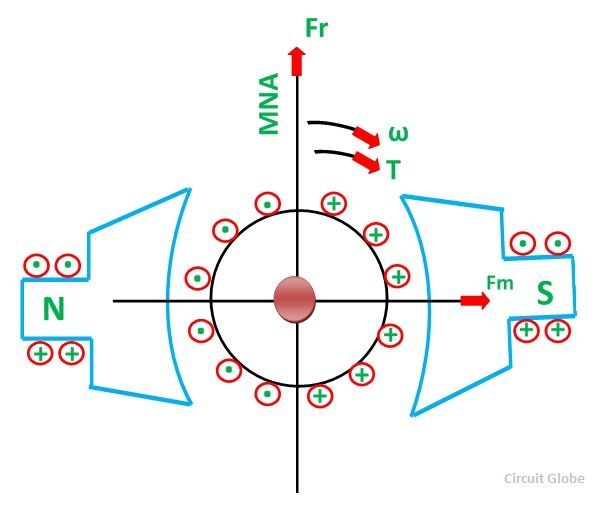
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Как устроен и принцип действия двигателя постоянного тока (видео)
Подавляющее большинство электроприводов нашего времени использует энергию переменного тока в асинхронном режиме. Тем не менее, двигатель постоянного тока, устройство и принцип действия которого будут рассматривать в этой статье, востребован ничуть не меньше. Что он собой представляет, какие существуют теоретические и технические особенности его эксплуатации, постараемся разобраться далее.
Что такое постоянный ток и чем он отличается от переменного?
Начать рассмотрение вопроса работы эл. двигателей необходимо с того, на чем она базируется, то есть с определения понятия «электрический ток» и его основных видов. Еще со школы нам должно быть известно, что в физике электрическим током называют направленное движение заряженных частиц (электронов или ионов). Его разделение на постоянный и переменный происходит в зависимости от величины и направления тока в некотором промежутке времени. Это хорошо видно на следующем графике:

Как видим, график (красная линия) не меняется по времени, напряжение остается стабильным. В то же время, переменный ток (зеленый график) имеет форму синусоиды, постоянно меняя свое значение и направление со временем. Периодичность, с которой график проходит через одинаковые точки по ординате называется частотой и ее стандартное значение 50 Гц.
На самом деле, практически любой бытовой прибор, электроинструмент использует постоянный ток, который преобразовывается из переменного (сетевого). Может возникнуть закономерный вопрос, а для чего тогда использовать синусоидальный ток? Дело в том, что такая форма задания тока позволяет легко преобразовывать напряжение, идущее от генератора электростанции с 200-300 тысяч Вольт до привычных 220, с учетом коэффициента эффективности.
Принцип действия электродвигателя
 Работа любого эл. двигателя пост. тока базируется на принципе взаимного действия магнитных полей статора и ротора. Здесь также нужно вспомнить базовую физику и историю с рамкой, вращающейся в однородном магнитном поле. Задание предполагает подачу на нее тока, индуцирующего собственное круговое магнитное поле. При взаимодействии с предыдущим формирует направленную перпендикулярно силу Ампера. Она выталкивает рамку из однородного поля.
Работа любого эл. двигателя пост. тока базируется на принципе взаимного действия магнитных полей статора и ротора. Здесь также нужно вспомнить базовую физику и историю с рамкой, вращающейся в однородном магнитном поле. Задание предполагает подачу на нее тока, индуцирующего собственное круговое магнитное поле. При взаимодействии с предыдущим формирует направленную перпендикулярно силу Ампера. Она выталкивает рамку из однородного поля.
В нашем случае, принцип действия тот же, но роль неподвижного однородного магнитного поля играет статор, а рамки – вращающийся ротор электродвигателя, обмотками, который еще называется якорем.

Как видим, два полюса статора создают однородное магнитное поле. Обмотка ротора состоит из двух частей, которые наматываются на его полюсах и соединены между собой последовательно. Концы обмоток замыкаются на разделенных, расположенных на валу электродвигателя коллекторных пластинах. Они имеют физический контакт (трение) с неподвижными щетками из графита, на которые подается пост. ток. Если при подключении соблюсти принцип расположение полюсов тока, как показано на рисунке, то полюс якоря, расположенный на схеме слева, станет условно северным, как и находящийся в непосредственной близости полюс статора электродвигателя.
Естественная реакция на действие магнитных сил заключается в том, что равнозначные полюса отталкиваются. В нашем случае такое возможно только за счет вращения. По инерции, северный полюс якоря, провернувшись на 180º станет напротив южного полюса статора. По логике вещей они должны начать притягиваться, что приведет к торможению. Чтобы этого не допустить, в момент перехода нейтральной линии коллектор переключает обмотки якоря местами, чтобы вновь организовать отторжение полюсов.
Учитывая эту информацию устройство двигателя постоянного тока можно изобразить следующим образом:

Характеристики эл. двигателя
Любой электродвигатель – это оборудование, которым можно и нужно управлять в зависимости от требуемых условий. Регулирование происходит одним из трех основных способов/принципов:
- Изменение напряжения, которое подается на обмотки ротора,
- Ввод в цепь дополнительного сопротивления,
- Изменения возбуждения (величины потока).
Работа эл. двигателя оценивается по графикам характеристик, которые бывают:
- Механическими. Представляют собой зависимость частоты/скорости вращения от момента на валу с учетом поправочного коэффициента,
- Регулировочными. Зависимость частоты вращения от напряжения в цепи питания обмоток якоря, сопротивления или потока.
На графике механической характеристики откладываются значения частоты вращения (ось ординат) и момента (ось абсцисс). По форме она представляет прямую с отрицательным уклоном. Построение графика происходит для определенной величины напряжения. Базовым уравнением механической характеристики является:

где ω – скорость вращения якоря, U – напряжение якорной цепи, К – конструктивный коэффициент, Ф – значение потока, RЯ – активное сопротивление якорной обмотки, М – электромагнитный момент электродвигателя.
В отличие от нее, график регулировочной характеристики строится для определенного момента на валу (ось абсцисс). На оси ординат по-прежнему находится частота. Для каждого из видов регулирования электродвигателя, уравнение будет иметь отдельную форму:
- Уравнение при регулировании напряжением:

- Уравнение при реостатном регулировании (сопротивлением):
- Уравнение при потоковом регулировании:



Сравнительный вид графиков представлен ниже:

Также следует напомнить, что механические характеристики могут быть естественными (снятые при номинальном режиме) или искусственными (получаются при изменении напряжения, сопротивления или потока).
Режимы работы эл. двигателей
Используя уже известный нам график для характеристик, но расширив его на четыре квадранта, можно оценить существующие режимы работы оборудования.
Нумерация квадрантов происходит против часовой стрелки, начиная с правого верхнего, в котором координаты по обеим осям идут со знаком «+». Как видно из графика, в первом и третьем квадрантах наблюдается двигательный режим, для которого мощность Р = М·ω >, 0. В двух других квадрантах реализуется режим генератора или тормозной, имеющий отрицательное значение мощности.
Как видим, график образует несколько характерных точек и зон, ответственных за отдельные режимы:
- Холостой ход. Образуется в точке ωо. В этом случае ток и момент равны нулю, а сам эл. двигатель не получает энергии,
- Генератор при параллельном подключении. Называется еще тормозным с рекуперацией в сеть. Реализуется при ω >, ωо и E >, U. Эл. двигатель получает механическую энергию от работающего оборудования, а в сеть взамен отдается электрическая (генератор тока),
- Короткое замыкание. В этом случае ω = 0 и Е = 0. Механическая энергия от вращения вала не отдается, а электрическая превращается в тепловую,
- Генератор при последовательном соединении. Этот режим еще называется торможением с противовключением. При этом ω <, 0, а ток и ЭДС имеют одинаковое направление. Выработка электричества происходит за счет вращения оборудования, совмещенного с валом ротора,
- Автономный генератор. Режим динамического торможения предполагает выработку электричества за счет одной лишь механической энергии вращения вала от привода, без участия сети.
Технические и энергетические параметры функционирования двигателей постоянного тока позволяют с большой эффективностью использовать их в разных сферах, от машиностроения до легкой промышленности и даже игрушек. Они могут действовать в чисто двигательном или режиме генератора (тормозном), используя различные коэффициенты.
Принцип Действия Двигателя Постоянного Тока: Что Нужно Знать

Мощный двигатель постоянного тока
Тема нашей сегодняшней статьи — принцип действия электродвигателя постоянного тока. Если вы бываете на нашем сайте, то наверняка уже знаете, что эту тему мы решили раскрыть более полно и понемногу разбираем все разновидности электромотором и электрогенераторов.
Постоянный ток известен человечеству вот уже где-то 200 лет, эффективно применять его научились немного позже, а вот сегодня трудно себе представить деятельность человека, где бы энергия не применялась. Приблизительно таким же образом происходила и эволюция электрических двигателей.
Немного истории и теории

Первые электрические двигатели
Бурное развитие электротехники не прекращается с момента зарождения этого направления в физике. Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
- Особую значимость имеют исследования М. Фарадея, который в 1821 году, проводя эксперименты по взаимодействию тока и разных проводников, выяснил, что проводник может вращаться внутри магнитного поля, ровно как вокруг проводника может вращаться и магнит.
- Второй этап развития занял более значительный отрезок времени от 1830-х до 1860-х годов. Теперь, кода основные принципы преобразования энергии человеку были известны, он пытался создать наиболее эффективную конструкцию двигателя с вращающимся якорем.
- В 1833 году американский изобретатель и по совместительству кузнец Томас Девенпорт смог построить первый роторный двигатель, работающий на постоянном токе, и сконструировать модель поезда, приводимую им в движение. На свою электрическую машину он получил патент спустя 4 года.

Б.С. Якоби
- В 1834 году Борис Семенович Якоби, русско-немецкий физик и изобретатель, создает первый в мире электродвигатель постоянного тока, в котором смог таки реализовать основной принцип работы таких машин, применяемый и сегодня – с постоянно вращающейся частью.
- В 1838 году, 13 сентября был произведен пуск настоящей лодки по Неве с 12-ю пассажирами на борту – так происходили полевые испытания двигателя Якоби. Лодка двигалась со скоростью 3 км\ч против течения. Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.

Лодка с лопастными колесами
Результатом проведенных испытаний стала возможность формирования основных принципов дальнейшего развития электромоторов:
- Во-первых, стало ясно, что расширение сферы их применения напрямую зависит от удешевления способов получения электрической энергии – требовался надежный и недорогой генератор, а не дорогостоящие на тот момент гальванические батареи.
- Во-вторых, требовалось создать достаточно компактные двигатели, которые бы, однако, обладали большим коэффициентом полезного действия.
- И в третьих – были очевидны преимущества двигателей с вращающимися неоднополюсными якорями, с постоянным вращающимся моментом.

Работа шунтового генератора
Затем наступает третий этап развития электромоторов, который ознаменован открытием явления самовозбуждения двигателя электрического тока, после чего был сформирован принцип обратимости таких машин, то есть двигатель может быть генератором, и наоборот. Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Интересно знать! Любая электрическая сеть подключена к электростанции, вырабатывающей ток. Сама станция, по сути, и есть набор мощнейших генераторов, приводимых в движение разными способами: течение реки, энергия ветра, ядерные реакции и прочее. Исключение составляют, разве что, фотоэлементы в солнечных батареях, но это уже другая, дорогая, пока не нашедшая достаточного распространения история.
Вид современной конструкции электродвигатель приобрел в далеком 1886 году, после чего в него вносились только доработки и усовершенствования.
Основные принципы функционирования

Двигатели постоянного тока и принцип действия: вспоминаем школьные уроки физики
В основу любого электрического двигателя положен принцип магнитного притягивания и отталкивания. В качестве эксперимента можете провести такой простейший опыт.
- Внутрь магнитного поля нужно поместить проводник, по которому нужно пропустить электрический ток.
- Для этого удобнее всего пользоваться магнитом в форме подковы, а в качестве проводника подойдет медная проволока подключенная концами к батарейке.
- В результате опыта вы увидите, что проволоку вытолкнет из области действия постоянного магнита. Почему это происходит?
- Дело в том, что при прохождении тока через проводник, вокруг последнего создается электромагнитное поле, которое вступает во взаимодействие с уже имеющимся, от постоянного магнита. Как результат этого взаимодействия, мы видим механическое движение проводника.
- Если говорить более подробно, то выглядит это так. Когда круговое поле проводника вступает во взаимодействие с постоянным от магнита, то сила магнитного поля с одной стороны возрастает, а с другой уменьшается, из-за чего провод выталкивает из области действия магнита под углом 90 градусов.

Занимательная физика
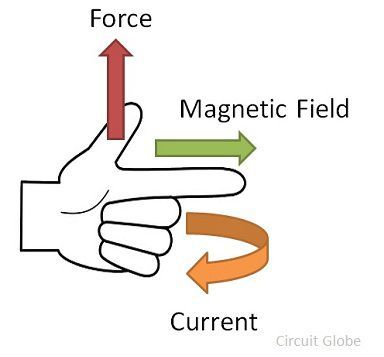
- Направление, в котором вытолкнет проводник можно установить по правилу левой руки, которое применимо только к электродвигателям. Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
Эти простые принципы двигателя постоянного тока применяется и поныне. Однако в современных агрегатах вместо постоянных магнитов применяют электрические, а рамки заменяют сложные системы обмоток.
Строение двигателя

Двигатель постоянного тока и устройство
Давайте теперь более подробно разберем, как устроен двигатель постоянного тока, какие в нем имеются детали и как они взаимодействуют друг с другом.
Продолжение теории

Принцип и устройство двигателя постоянного тока
Сконструировать простейший двигатель постоянного тока вы легко сможете своими руками. Инструкция такова, что достаточно соорудить прямоугольную рамку из проводника, способную вращаться вокруг центральной оси.
- Рамка помещается в магнитное поле, после чего на ее концы подается постоянное напряжение, от той же батарейки.
- Так только по рамке начинает течь ток, она приходит в движение, пока не займет горизонтальное положение, называемое нейтральным или «мертвым», когда воздействие поля на проводник равно нулю.
- По идее, рамка должна остановиться, но этого не произойдет, так как она пройдет «мертвую» точку по инерции, а значит, электродвижущие силы снова начнут возрастать. Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.
- Чтобы процесс протекал нормально нужно предусмотреть такую конструкцию подключения рамки к питанию, при которой в момент прохождения тока через нулевую точку будет происходить переключение полюсов, а значит, относительно магнитного поля ток потечет в прежнем направлении.
В качестве такого устройства применяется коллектор, состоящий их изолированных пластин, но давайте поговорим о нем чуть позже.
В виде альтернативы можно изготовить такую рамку, что показана на фото выше. Ее отличие в том, что по двум контурам рамки ток протекает в одном направлении, что позволяет избавиться от коллектора, однако такой электромотор крайне неэффективен, из-за постоянно воздействующих тормозящих сил.
Получив вращение ротора, к нему можно приладить привод и дать сопоставимую мощности двигателя нагрузку, получая тем самым работающую модель.
Строение электромотора постоянного тока

Каково устройство электродвигателя постоянного тока
Итак, переходим к строению двигателей:
- Статор или индуктор – неподвижная часть двигателя, представляющая собой деталь, создающую постоянное электромагнитное поле. Состоит статор из сердечника, выполненного из тонколистовой стали (из пластин определенного профиля набирается деталь нужного размера) и обмотки.

Принцип действия и устройство двигателя постоянного тока: статор
- Обмотка укладывается в пазы сердечника определенным образом, формируя основные и добавочные магнитные полюса, естественно, при включении в сеть.
- Обмотка возбуждения находится на главных полюсах, тогда как на добавочных она служит для улучшения коммутации – увеличивает эффективность мотора, его КПД.

Якорь двигателя постоянного тока
- Ротор двигателя, являющийся тут якорем, тоже имеет похожее строение, но отличает его, прежде всего то, то данный узел двигателя является подвижным. Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.
- Витки обмотки якоря изолированы друг от друга и соединяются с контактными пластинами коллектора, через которые и подается питание.
- Все части ротора закреплены на металлическом валу, который является центральной осью вращения двигателя. К нему же и подключается привод, передающий крутящий момент на внешние механизмы.

Вид коллектора
- Коллектор (полосатый цилиндр, насаженный на вал) соединен с питающей сетью через щетки, которые выполняются чаще всего из графита. Вообще строение коллектора таково, что контактные пластины также изолированы, что позволяет эффективно менять направление тока в цепи, чтобы избегать торможения двигателя.
- Сами щетки имеют скользящий контакт с пластинами коллектора, и удерживаются в одном положении при помощи щеткодержателей. Поддерживать постоянное напряжение контакта (а ведь мы знаем, что щетки истираются и истончаются) помогают пружины.

Графитовые щетки
- Щетки соединены медными проводами с питающей сетью. Дальше начинается внешняя схема электропитания и управления, о которой мы поговорим немного позже.

Валовый подшипник качения
- Следом за коллектором на валу располагается подшипник качения, обеспечивающий плавное вращение. Сверху он защищен специальным полимерным кольцом, защищающим его от пыли.
Совет! Одной из частых поломок электрических двигателей, является выход из строя подшипника. Если вовремя не заменить этот небольшой элемент конструкции, то запросто можно спалить весь двигатель.
- С обратной стороны обмотки, на том же валу, располагается крыльчатка, поток воздуха от которой эффективно охлаждает двигатель.
- Следом за крыльчаткой обычно крепится привод, отличающийся параметрами, в зависимости от назначения агрегата, в котором двигатель постоянного тока установлен.
В принципе, на этом все. Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Особенности коллекторных двигателей

Перфоратор в разрезе: такие двигатели универсальны и могут работать как от постоянного, так и от переменного тока, но только при соответствующем подключении
Вообще коллекторный двигатель – это действительно хорошее устройство. Такие агрегаты легчайшим образом поддаются регулировке. Повысить, опустить обороты – не проблема. Дать четкий крутящий момент или жесткую механическую характеристику – запросто.
Однако, несмотря на ряд неоспоримых преимуществ, двигатель имеет повышенную сложность сборки, относительно двигателей переменного тока с самовозбуждающимся ротором или других бесколлекторных агрегатов, а также меньшую надежность. И вся загвоздка состоит в этом самом коллекторе.
- Этот узел достаточно дорог, а цена его ремонта иной раз сопоставима с новой деталью, если вообще возможность восстановления имеется.
- Он забивается при работе токопроводящей пылью, что со временем может стать причиной выхода из строя всего двигателя.
- Коллектор искрит, создавая при этом помехи, а при высокой нагрузке так и вовсе может полыхнуть, создавая круговой огонь. В таком случае его закоротит дугой, что несовместимо с жизнью двигателя.
Выше мы уже сказали, что его задача менять направление тока в витках обмотки, а теперь хотим разобрать вопрос подробнее.

Все гениальное просто
- Итак, по сути, данная часть ротора служит выпрямителем тока, то есть переменный ток становится, проходя через него, постоянным, что справедливо для генераторов, или меняет направление тока, если речь идет о двигателях.
- В случае рассмотренного выше примера с вращающейся в магнитном поле рамкой, требовался коллектор, состоящий из двух изолированных полуколец.
- Концы рамки подключаются к разным полукольцам, что не позволяет цепи накоротко замкнуться.
- Как мы помним, коллектор контактирует с щетками, которые установлены таким образом, чтобы они одновременно не контактировали друг с другом и меняли полукольца при прохождении рамкой нулевой точки.

Работа коллектора
Все предельно просто, однако такие двигатели и генераторы не могут быть нормальной мощности в силу конструктива. В результате якорь стали делать с множеством витков, чтобы активные проводники всегда находились максимально близко к полюсам магнита, ведь, вспоминая закон электромагнитной индукции, становится ясно, что именно это положение самое эффективное.
Раз увеличивается количество витков, значит, требуется разбить коллектор на большее число частей, что собственно и является причиной сложности изготовления и дороговизны этого элемента.
Альтернатива коллекторному двигателю

Бесщеточный двигатель постоянного тока
В электронике уже давно царит век полупроводников, что позволяет изготавливать надежные и компактные микросхемы. Так зачем же мы до сих пор пользуемся коллекторными двигателями? А действительно?
- Инженеры тоже не оставили вопрос незамеченным. В результате коллектор сменили силовые ключи, дополнительно в конструкции появились датчики, регистрирующие текущее положение ротора, чтобы система автоматически определяла момент переключения обмотки.
- Как мы помним, нет никакой разницы, двигается ли магнит относительно проводника, либо же это происходит наоборот. Поэтому якорем становится статор, а на роторе располагается постоянный магнит или простейшая обмотка, соединенная с питанием через контактные кольца, который вращать внутри конструкции намного проще.

Контактные кольца в простейшем генераторе переменного тока
- Строение контактных колец чем-то напоминает коллектор, однако они намного надежнее и изготавливать их в условиях производства проще.
В итоге получился новый тип двигателя, а именно бесщеточный двигатель постоянного тока aka BLDC. Устройству доступны те же преимущества, что и коллекторному двигателю, но от надоедливого коллектора мы избавляется.
Однако такие двигатели применяются только в дорогих аппаратах, тогда как простая техника, например соковыжималка или тот же перфоратор будут рентабельнее в производстве, если ставить на них уже классические коллекторные модели двигателей.
Управление двигателем постоянного тока

Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Совет! Если сделать одновременно обе эти манипуляции, то с двигателем ничего не произойдет, и он продолжит вращаться в том же направлении, что и ранее.
Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.

Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.
- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.

Схемы управления двигателем на базе интегральной микросхемы LM317
- Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.

Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.
- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.
Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная. Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Принцип действия двигателя постоянного тока: конструкция и особенности
Главной конструктивной и характерной принадлежностью машины постоянного тока, служит использование для присоединения к электрической сети коммутатора, предназначенного для преобразования величин постоянного тока в переменный ток. Коммутатор является непременным элементом любой машины этого типа ввиду того, что ее якорная обмотка двигателя подразумевает наличие переменного тока.
Особенности двигателя постоянного тока
Двигательные устройства постоянного тока отличаются широкими возможностями регулирования скорости вращения и обладают способностью сохранять во всем диапазоне регулирования высокий КПД, а также имеют в наличии механические характеристики, благодаря которым двигатели могут использоваться по специальному назначению, в соответствии с необходимыми требованиями.
Принцип работы
Функционально двигатель принадлежит к классу синхронных машин обращенного типа, это объясняется тем, что статор и ротор поменяли выполнение задач. Статор выполняет функции по возбуждению магнитного поля, ротор принял задачи направленные на преобразование энергии.
Во время вращения якоря в магнитном поле, производимым статором в витках обмотки, наводится ЭДС. Направление ее движения находится по правилу правой руки.
После того, как якорь и коллектор повернутся на 180 градусов виток меняет свои стороны, на противоположное направление меняется движение ЭДС.
Так происходит процесс индуцирования переменной электродвижущей силы, выпрямляемой посредством коллектора.
Коллектор, через щеточный механизм, соединен с обеими сторонами витка, в результате этого происходит снятие щетками текущего в неизменном направлении пульсирующего напряжения, это способствует наличию во внешней цепи, идущего в постоянном направлении, пульсирующего тока. Для того, чтобы снизить пульсацию в пазах якоря, прибавляют добавочное количество витков.
Конструкция двигателя
Двигатель, как и любая другая машина этого типа, содержит в своей конструкции статор, являющегося неподвижным элементом, и ротор (якорь) – вращающийся элемент машины, между ними находится воздушный зазор. В якоре двигателя происходит индуцирование ЭДС. Создание основного магнитного поля происходит при помощи главных полюсов, состоящих из сердечников и катушек возбуждения.
Равномерное распределение полученной магнитной индукции в области воздушного зазора обеспечивается полюсными наконечниками.
Чередование полярности полюсов во время движения электрического тока достигается за счет соединения катушек главных полюсов в обмотку возбуждения. Для улучшения коммутации предусмотрены добавочные полюса.
Уменьшение вихревых токов, которые появляются в результате перемагничивания якоря в процессе его вращения в созданном магнитном поле, происходит за счет конструкции сердечника, исполненного из пластин электротехнической стали, для большего эффекта он покрывается специальным лаком.
Контакт внешней цепи машины с коллектором осуществляется за счет щеток, основным материалом для них является графит.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Электродвигатель постоянного тока: принцип работы и действия, устройство, характеристики
Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом. Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю. Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.
Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.
- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.
Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.
Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Принцип работы двигателя постоянного тока
Принцип работы
Двигатели постоянного тока
На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток —
в результате создаётся постоянное магнитное поле (поле возбуждения).
В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами.
В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля
статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов,
после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается.
По способу возбуждения двигатели постоянного тока делятся на четыре группы:
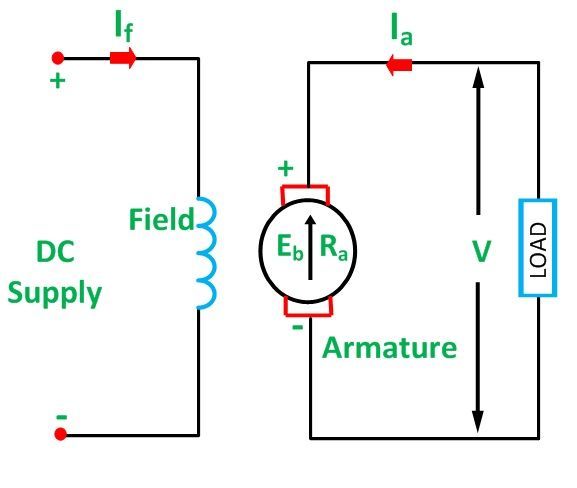
- С независимым возбуждением — обмотка возбуждения питается от независимого источника
- С параллельным возбуждением — обмотка возбуждения включается параллельно источнику питания обмотки якоря
- С последовательным возбуждением — обмотка возбуждения включена последовательно с обмоткой якоря
- Со смешанным возбуждением — у двигателя есть две обмотки: параллельная и последовательная.
Пуск двигателя постоянного тока
При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое
сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени
(максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна
за другой.
Регулирование скорости вращения двигателя постоянного тока
- Скорость ниже номинальной регулируется напряжением на якоре (мощность при этом пропорциональна скорости,
момент неизменен) - Скорость выше номинальной регулируется током обмотки возбуждения — чем слабее поле возбуждения,
тем выше скорость (момент падает при постоянной мощности)
Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей
(приводов постоянного тока).
Преимущества и недостатки двигателей постоянного тока
Преимущества:
- Практически линейные характеристики двигателя:
- механическая характеристика (зависимость частоты от момента)
- регулировочная характеристика (зависимость частоты от напряжения якоря)
- Просто регулировать частоту вращения в широких пределах
- Большой пусковой момент
- Компактный размер.
Недостатки:
- Дополнительные расходы на профилактическое обслуживание коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
- Дороже асинхронных двигателей.
Двигатель постоянного тока (ДПТ) принцип работы, устройство
Двигатели постоянного тока – это специализированные машины, применяемые для того, чтобы делать из энергии постоянного тока механическую.
Что касается принципа работы данной разновидности электрических двигателей, то он может осуществляться двумя способами:
- Магнитные поля статора и ротора взаимодействуют между собой.
- Стержни в количестве двух штук, концы которых замкнуты и рамка подвижного типа, в магнитном поле статора находится ток.
Как устроен двигатель
Если мы посмотрим на простейшие модели для демонстрации, то сможем увидеть лишь один стержень и рамку, по которой проходит ток.

Схема двигателя постоянного тока
Якорь основная обмотка, ток на него подается с помощью коллектора и щеточного механизма. Структура статора может быть двух типов: постоянные магниты или же обмотки возбуждения. Если используются постоянные магниты, то этот двигатель по мощности будет уступать тому, в котором установлены обмотки возбуждения.
Основные параметры электродвигателя постоянного тока
Направление ЭДС, которую навели, всегда противоположно направлению тока в проводнике. Наведенная ЭДС может последовательно изменяться, это будет зависеть главным образом от перемещения проводников в магнитном поле.
Если сложить сумму ЭДС в каждой из катушек, ты мы получим суммарную ЭДС, она является приложением к внешним выводам двигателя. Но главным параметром данной разновидности электрических двигателей является его постоянная. Ей определяется возможность двигателя преобразовывать электроэнергию в механическую.
Постоянная не будет зависеть от соединения обмоток в электродвигатели только если использоваться будет один материал проводника.
Разновидности двигателей постоянного тока
Рассмотрим разновидности двигателей постоянного тока:
- Коллекторный с постоянным магнитом. Индуктор этого двигателя включает в себя постоянный магнит, из которого состоит магнитное поле статора.
- Бесколлекторный (бесщеточный). Различие лишь в отсутствии щеток для замены при износе, из-за искрения коммутатора.
- Серводвигатель постоянного тока. Это привод, ось которого может перемещаться в заданное положение.
Управление здесь соединено печатной платой, двигателем постоянного тока и потенциометром (датчиком). Редуктор преобразует электричество в механическое действие. В результате скорость, с которой вращается выходной вал, снижается до необходимого значения.
Способы возбуждения электродвигателей постоянного тока
В этой разновидности электрических двигателей применяются специальные обмотки, которые называются «обмотками возбуждения». Они приводят в действие сам механизм двигателя.
Независимое возбуждение
При данном типе подключения обмотка накручивается напрямую к источнику питания, при этом, характеристики двигателя с таким способом возбуждения схожи с характеристиками двигателей на постоянных магнитах.
Параллельное возбуждение
Обмотка возбуждения и ротор соединены с одним и тем же источником тока параллельным способом. В этой схеме ток обмотки возбуждения ниже, чем ток Ротора. Последовательное возбуждение. Обмотка последовательно соединяется с якорем. Скорость работы двигателя зависит от его нагрузки.
Смешанное возбуждение
Данная схема предполагает использование двух обмоток возбуждения, расположенных попарно на каждом полюсе электродвигателя. Обмотки могут быть соединены двумя способами: с суммированием или с вычитанием потоков.

Какие существуют способы возбуждения двигателей постоянного тока
Осуществление переключения и контроля двигателей
Данная разновидность двигателей имеет два режима: они могут быть включёнными, либо отключёнными. Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
В схеме управления используется биполярный транзистор, он играет ключевую роль в переключении режимов.
Контроль скорости двигателя
Потому как скорость данной разновидности двигателей является пропорциональной напряжению на клеммах, можно использовать транзистор для регулирования напряжения на них. Эти два транзистора подключены как пара для управления током главного ротора.
Регулировка скорости импульса
Скорость вращения данной разновидности электрических двигателей является пропорциональной среднему давлению на второй клемме.
Изменение направления движения двигателя постоянного тока
Есть много преимуществ в управлении скоростью данной разновидности электрических двигателей, но есть один большой недостаток: направление вращения всегда одно и то же. Во многих случаях машина действует по простому принципу, чтобы двигаться вперед и назад. H-мостовая схема двигателя.
Базовая конфигурация четырех переключателей, будь то электромеханические реле или транзисторы, аналогична букве Н с двигателем, расположенным на шине посередине.
Особенности эксплуатации
Двигатель оснащен механизмами защиты от перегрузки. Предохранение необходимо сделать с задержкой по времени. Защита должна действовать в отрыве, или сигнально, или вентиляционно, если возможен такой вариант.

Схема Н-моста

Подробная таблица истинности Н-моста электродвигателя
Сфера использования
На электростанциях они устанавливаются как генераторы для изготовления оборудования, автомобилей и даже различного рода быттехники. Сегодня в каждом доме есть устройство с мотором переменного тока.
Заключение
Надеемся, что после прочтения этой статьи у вас не осталось вопросов относительно данной разновидности электрических двигателей. Если вы хотите получать больше информации по этой теме, а также по теме асинхронных двигателей и сборки металлоискателей своими руками, подписывайтесь на нашу группу в социальной сети «вконтакте».
Предыдущая
Электрические машиныЧто такое асинхронный двигатель и принцип его действия
Следующая
Электрические машиныВсе что нужно знать о шаговых электродвигателях
Принцип работы двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует постоянный ток в механическую работу. Он работает по принципу закона Лоренца, который гласит, что « проводник с током, помещенный в магнитное и электрическое поле, испытывает силу ». Опытная сила называется силой Лоренца. Правило левой руки Флемминга определяет направление силы.
Правило левой руки Флеминга
Если большой, средний и указательный пальцы левой руки смещены друг относительно друга на угол 90 °, средний палец представляет направление магнитного поля.Указательный палец показывает направление тока, а большой палец показывает направление сил, действующих на проводник.
Формула рассчитывает величину силы,
Прежде чем понять принцип работы двигателя постоянного тока, мы должны сначала узнать о его конструкции. Якорь и статор — две основные части двигателя постоянного тока. Якорь — это вращающаяся часть, а статор — их неподвижная часть. Катушка якоря подключена к источнику постоянного тока.
Катушка якоря состоит из коммутаторов и щеток. Коммутаторы преобразуют переменный ток, индуцированный в якоре, в постоянный ток, а щетки передают ток от вращающейся части двигателя к неподвижной внешней нагрузке. Якорь размещается между северным и южным полюсами постоянного или электромагнита.
Для простоты предположим, что якорь имеет только одну катушку, которая расположена между магнитным полем, показанным ниже на рисунке А.Когда на катушку якоря подается постоянный ток, через нее начинает течь ток. Этот ток создает вокруг катушки собственное поле.
На рисунке B показано поле, индуцируемое вокруг катушки:
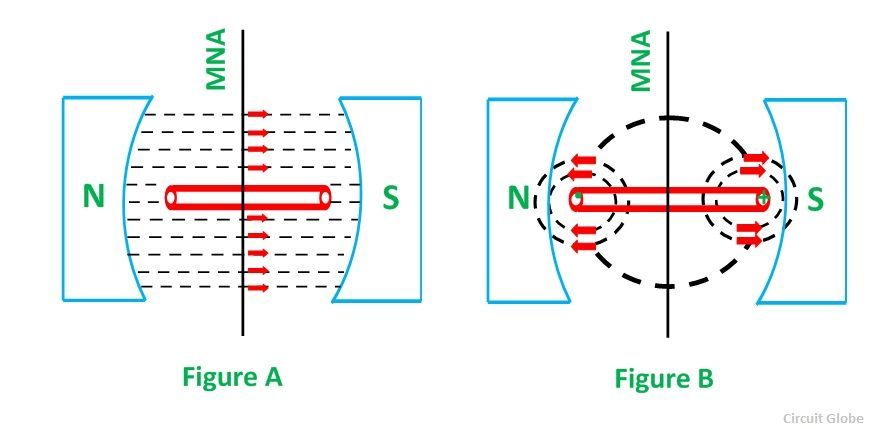
В результате взаимодействия полей (создаваемых катушкой и магнитом) результирующее поле возникает поперек проводника. Результирующее поле стремится вернуться в исходное положение, то есть на оси основного поля. Поле оказывает силу на концах проводника, и катушка начинает вращаться.
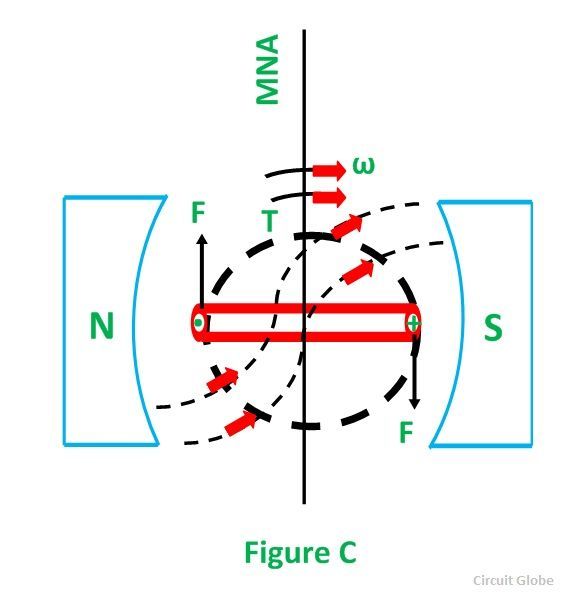
Пусть поле, создаваемое основным полем, равно F м , и это поле вращается по часовой стрелке. Когда в катушке течет ток, они создают собственное магнитное поле, скажем, F r . Поле F r пытается двигаться в направлении основного поля. Тем самым крутящий момент действует на катушку якоря.
Настоящий двигатель постоянного тока состоит из большого количества катушек якоря. Скорость двигателя прямо пропорциональна количеству катушек, используемых в двигателе. Эти катушки находятся под воздействием магнитного поля.
Один конец проводов находится под влиянием северного полюса, а другой конец — под влиянием южного полюса. Ток входит в катушку якоря через северный полюс и движется наружу через южный полюс.
Когда катушка перемещается от одной щетки к другой, одновременно меняется и полярность катушки. Таким образом, направление силы или крутящего момента, действующего на катушку, остается неизменным.
Вращающий момент, создаваемый в катушке, становится нулевым, когда катушка якоря перпендикулярна основному полю. Нулевой крутящий момент означает, что двигатель перестает вращаться. Для решения этой проблемы в роторе используется номер обмотки якоря. Итак, если одна из их катушек перпендикулярна полю, то другие катушки создают крутящий момент. И ротор движется непрерывно.
Кроме того, для получения непрерывного крутящего момента конструкция сохраняется таким образом, что всякий раз, когда катушки пересекают магнитную нейтральную ось магнита, направление тока в катушках становится обратным.Это можно сделать с помощью коммутатора.
.
Что такое бесщеточный двигатель постоянного тока (BLDC)? Структура, работа и применение
Конструкция, работа и применение BLDC (бесщеточный двигатель постоянного тока)
Бесщеточные двигатели постоянного тока (BLDC) стали предметом пристального внимания многих производителей двигателей, поскольку эти двигатели становятся все более предпочтительными выбор для многих приложений, особенно в области техники управления двигателями. Двигатели BLDC превосходят щеточные двигатели постоянного тока по многим параметрам, таким как способность работать на высоких скоростях, высокий КПД и лучший отвод тепла.
Они являются неотъемлемой частью современной приводной техники, чаще всего используются для приводов, станков, электродвигателей, робототехники, компьютерной периферии, а также для выработки электроэнергии. С развитием бессенсорной технологии, помимо цифрового управления, эти двигатели стали настолько эффективными с точки зрения общей стоимости системы, размера и надежности.
Что такое бесщеточный двигатель постоянного тока (BLDC)?
Бесщеточный двигатель постоянного тока (известный как BLDC) — это синхронный электродвигатель с постоянными магнитами , который приводится в действие электричеством постоянного тока (DC) и выполняет систему коммутации с электронным управлением (коммутация — это процесс создания крутящего момента в двигателе. изменяя фазные токи через него в соответствующее время) вместо системы механической коммутации.Двигатели BLDC также называют двигателями с трапециевидными постоянными магнитами.
В отличие от обычного электродвигателя постоянного тока щеточного типа, в котором щетки механически контактируют с коммутатором на роторе, образуя электрический путь между источником постоянного тока и обмотками якоря ротора, электродвигатель BLDC использует электрическую коммутацию с ротором с постоянными магнитами и статором. с последовательностью катушек. В этом двигателе постоянный магнит (или полюса поля) вращается, а проводники с током закреплены.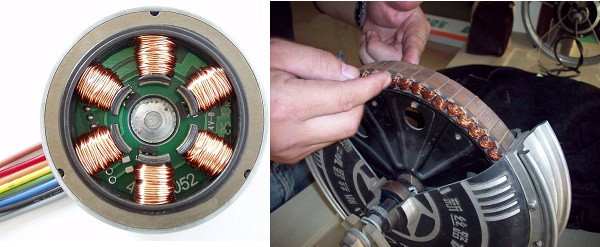
Катушки якоря переключаются электронным образом с помощью транзисторов или кремниевых выпрямителей в правильном положении ротора таким образом, что поле якоря находится в пространственной квадратуре с полюсами поля ротора. Следовательно, сила, действующая на ротор, заставляет его вращаться. Датчики Холла или угловые энкодеры обычно используются для определения положения ротора и устанавливаются вокруг статора. Обратная связь по положению ротора с датчика помогает определить, когда следует переключить ток якоря.
Эта электронная коммутационная система устраняет необходимость в коллекторном устройстве и щетках в двигателе постоянного тока и, следовательно, обеспечивает более надежную и менее шумную работу. Из-за отсутствия щеток двигатели BLDC могут работать на высоких скоростях. КПД двигателей BLDC обычно составляет от 85 до 90 процентов, тогда как электродвигатели постоянного тока щеточного типа имеют КПД от 75 до 80 процентов. Доступны широкие разновидности двигателей BLDC: от небольшого диапазона мощности до дробного, целого и большого диапазонов мощности.

Конструкция двигателя BLDC
Двигатели BLDC могут быть сконструированы в различных физических конфигурациях. В зависимости от обмоток статора они могут быть однофазными, двухфазными или трехфазными. Однако чаще всего используются трехфазные двигатели BLDC с ротором с постоянными магнитами. 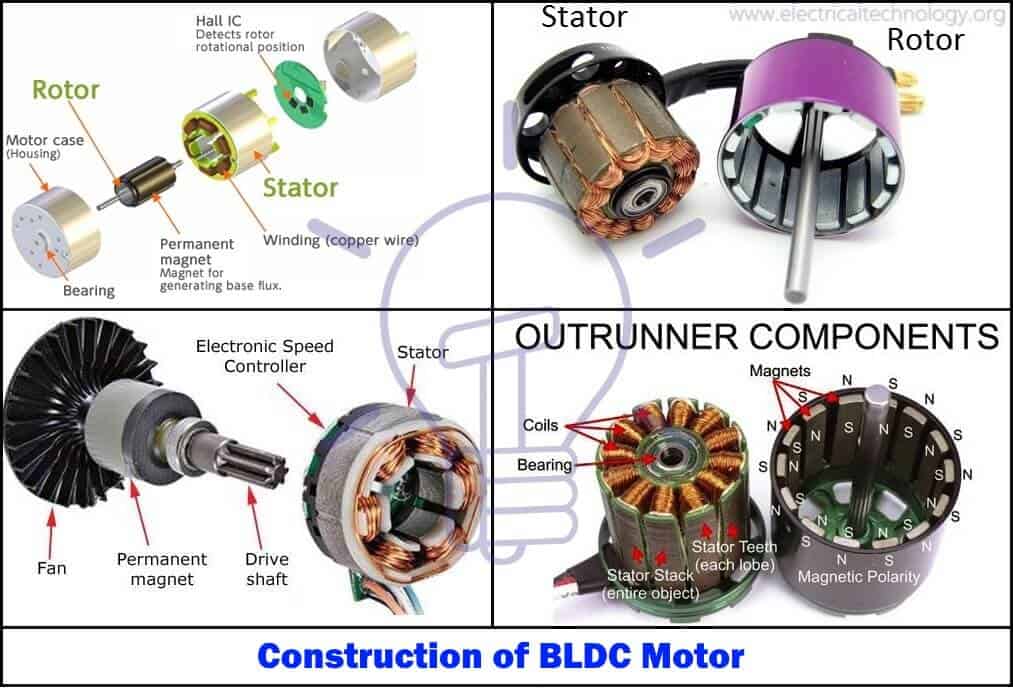
Конструкция этого двигателя имеет много общего с трехфазным асинхронным двигателем, а также с обычным двигателем постоянного тока.Этот двигатель, как и все другие двигатели, имеет статор и ротор. 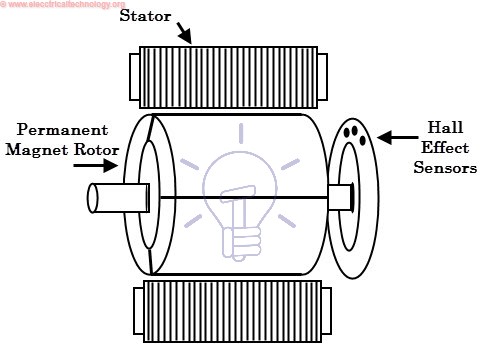
Статор двигателя BLDC, состоящий из многослойных стальных пластин, несущих обмотки. Эти обмотки размещены в пазах, которые прорезаны в осевом направлении по внутренней периферии статора. Эти обмотки могут быть расположены по схеме звезды или треугольника. Однако большинство двигателей с BLDC имеют трехфазный статор, соединенный звездой.
Каждая обмотка состоит из множества соединенных между собой катушек, причем одна или несколько катушек помещаются в каждый паз.Чтобы сформировать четное количество полюсов, каждая из этих обмоток распределена по периферии статора. 
Статор должен быть выбран с правильным номинальным напряжением в зависимости от мощности источника питания. Для робототехники, автомобилестроения и малых исполнительных устройств предпочтительны двигатели BLDC с напряжением 48 В или менее. Для промышленных приложений и систем автоматизации используются двигатели с номинальным напряжением 100 В и выше.
Ротор
Двигатель BLDC имеет в роторе постоянный магнит.Число полюсов ротора может варьироваться от 2 до 8 пар полюсов с чередованием южного и северного полюсов в зависимости от требований приложения. Для достижения максимального крутящего момента в двигателе плотность магнитного потока материала должна быть высокой. Для создания необходимой плотности магнитного поля необходим подходящий магнитный материал для ротора. 
Ферритовые магниты недороги, однако они имеют низкую магнитную индукцию для данного объема. Магниты из редкоземельных сплавов обычно используются в новых конструкциях.Некоторые из этих сплавов — самарий-кобальт (SmCo), неодим (Nd) и феррит и бор (NdFeB). Ротор может быть сконструирован с различными конфигурациями сердечника, такими как круглый сердечник с постоянным магнитом на периферии, круглый сердечник с прямоугольными магнитами и т. Д.
Датчики Холла
Датчик Холла предоставляет информацию для синхронизации возбуждения якоря статора с положением ротора . Поскольку коммутация двигателя BLDC управляется электроникой, обмотки статора должны быть последовательно запитаны для вращения двигателя.Перед подачей питания на конкретную обмотку статора необходимо подтверждение положения ротора. Таким образом, датчик Холла, встроенный в статор, определяет положение ротора.
Большинство двигателей BLDC содержат три датчика Холла, встроенные в статор. Каждый датчик генерирует сигналы низкого и высокого уровня всякий раз, когда полюса ротора проходят рядом с ним. Точная последовательность коммутации обмотки статора может быть определена на основе комбинации характеристик этих трех датчиков.
Принцип работы и работа двигателя BLDC
Двигатель BLDC работает по принципу, аналогичному принципу обычного двигателя постоянного тока, т.е.е., закон силы Лоренца, который гласит, что всякий раз, когда проводник с током помещен в магнитное поле, он испытывает силу. В результате силы реакции на магнит будет действовать равная и противоположная сила. В случае двигателя BLDC токопроводящий проводник неподвижен, а постоянный магнит движется.
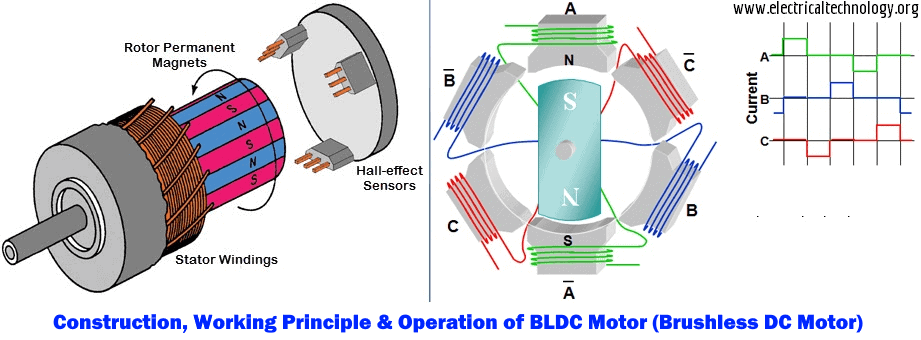
Когда обмотки статора электрически переключаются источником питания, он становится электромагнитом и начинает создавать однородное поле в воздушном зазоре.Хотя источником питания является постоянный ток, при переключении генерируется сигнал переменного напряжения трапециевидной формы. Из-за силы взаимодействия между статором электромагнита и ротором с постоянным магнитом ротор продолжает вращаться.
Рассмотрим рисунок ниже, на котором статор двигателя возбуждается в зависимости от различных состояний переключения. При переключении обмоток на сигналы высокого и низкого уровня, соответствующая обмотка запитывается как северный и южный полюса. Ротор с постоянным магнитом с северным и южным полюсами совмещен с полюсами статора, заставляя двигатель вращаться.
Обратите внимание, что двигатель создает крутящий момент из-за развития сил притяжения (при выравнивании Север-Юг или Юг-Север) и сил отталкивания (при выравнивании Север-Север или Юг-Юг). Таким образом, двигатель вращается по часовой стрелке. 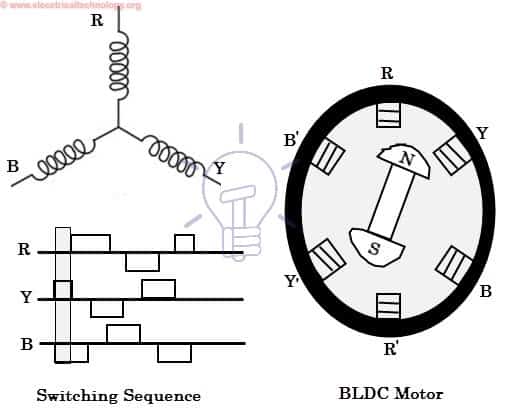
Здесь может возникнуть вопрос, как мы узнаем, какая катушка статора должна быть под напряжением и когда это делать. Это потому что; Непрерывное вращение двигателя зависит от последовательности переключения катушек. Как обсуждалось выше, датчики Холла передают электронному контроллеру обратную связь по положению вала.
На основе этого сигнала от датчика, контроллер решает включить определенные катушки. Датчики на эффекте Холла генерируют сигналы низкого и высокого уровня всякий раз, когда полюса ротора проходят рядом с ними. Эти сигналы определяют положение вала.
Бесщеточный привод двигателя постоянного тока
Как описано выше, схема электронного контроллера подает питание на соответствующую обмотку двигателя путем поворота транзистора или других твердотельных переключателей для непрерывного вращения двигателя. На рисунке ниже показана схема простого привода BLDC двигателя , которая состоит из моста MOSFET (также называемого мостом инвертора), электронного контроллера, датчика Холла и двигателя BLDC.
Здесь датчики Холла используются для обратной связи по положению и скорости. Электронный контроллер может быть блоком микроконтроллера или микропроцессором, или процессором DSP, или блоком FPGA, или любым другим контроллером. Этот контроллер получает эти сигналы, обрабатывает их и отправляет управляющие сигналы в схему драйвера MOSFET. 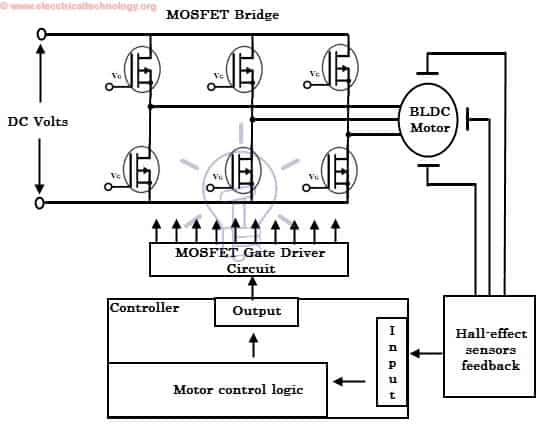
Помимо переключения номинальной скорости двигателя, дополнительная электронная схема изменяет скорость двигателя в зависимости от требуемого применения. Эти блоки управления скоростью обычно реализуются с ПИД-регуляторами для точного управления.Кроме того, с помощью современных приводов можно производить четырехквадрантную работу двигателя, сохраняя при этом высокую эффективность при изменении скорости.
Связанные статьи по электроприводам
Преимущества двигателя BLDC
Двигатель BLDC имеет несколько преимуществ по сравнению с обычными двигателями постоянного тока, и некоторые из них:
- У него нет механического коммутатора и связанных с ним проблем
- Высокая эффективность благодаря использованию ротор с постоянными магнитами
- Высокая скорость работы даже в нагруженных и ненагруженных условиях из-за отсутствия щеток, ограничивающих скорость
- Меньшая геометрия двигателя и меньший вес, чем щеточные двигатели постоянного тока и асинхронные двигатели переменного тока
- Длительный срок службы без проверки и техническое обслуживание требуется для системы коллектора
- Более высокий динамический отклик из-за низкой инерции и несущих обмоток в статоре
- Меньше электромагнитных помех
- Тихая работа (или низкий уровень шума) из-за отсутствия щеток
Недостатки бесщеточного двигателя
- Эти двигатели дорогие
- Не так много интегрированных решений электронного управления, особенно для крошечных двигателей BLDC
- Требуется сложная схема привода
- Необходимы дополнительные датчики
9012 3 Требуется электронный контроллер для управления этим двигателем стоит дорого
Вы также можете прочитать: Подключение трехфазного двигателя Звезда / треугольник (Y-Δ) назад / вперед с таймером Схема питания и управления
Применение бесщеточных электродвигателей постоянного тока (BLDC)
Бесщеточные электродвигатели постоянного тока (BLDC) используются для самых разных применений требования, такие как переменные нагрузки, постоянные нагрузки и приложения для позиционирования в областях промышленного управления, автомобилестроения, авиации, систем автоматизации, медицинского оборудования и т. д.Некоторые специфические области применения двигателей BLDC:
- Жесткие диски компьютеров и DVD / CD-плееры
- Электромобили, гибридные автомобили и электрические велосипеды
- Промышленные роботы, станки с ЧПУ и простые системы с ременным приводом
- Стиральные машины, компрессоры и сушилки
- Вентиляторы, насосы и нагнетатели
Вы также можете прочитать
.Типы двигателей постоянного тока
— шунтирующие, последовательные и двигатели с комбинированной обмоткой
A DC Moto r, DC назван в соответствии с соединением обмотки возбуждения с якорем. В основном есть два типа двигателей постоянного тока. Один из них — это двигатель постоянного тока с отдельным возбуждением, а другой — двигатель постоянного тока с самовозбуждением.
Самовозбуждающиеся двигатели далее классифицируются как Шунтирующие двигатели или шунтирующие двигатели, серии или последовательные двигатели и Составные двигатели или составные двигатели.
Двигатель постоянного тока преобразует электрическую энергию в механическую. Конструкция двигателя постоянного тока и генератора одинакова. Но двигатель постоянного тока имеет широкий диапазон скоростей и хорошее регулирование скорости в электротяге.
Принцип работы двигателя постоянного тока основан на принципе, согласно которому проводник с током помещается в магнитное поле и на него действует механическая сила.
Двигатель постоянного тока обычно используется там, где требуется защитный кожух, например, каплезащищенный, огнестойкий и т. Д.согласно требованиям. Подробное описание различных типов двигателей приведено ниже.
В комплекте:
Двигатель постоянного тока с отдельным возбуждением
Как следует из названия, катушки возбуждения или обмотки возбуждения получают питание от отдельного источника постоянного тока, как показано на принципиальной схеме, показанной ниже:
Двигатель постоянного тока с автономным возбуждением
Двигатель постоянного тока с самовозбуждением
Как следует из названия, самовозбуждающийся, следовательно, в этом типе двигателя ток в обмотках подается самой машиной или двигателем.Самовозбуждающийся двигатель постоянного тока подразделяется на двигатель с параллельной обмоткой и двигатель с последовательной обмоткой. Они подробно описаны ниже.
Двигатель с параллельной обмоткой
Это наиболее распространенные типы двигателей постоянного тока. Здесь обмотка возбуждения подключена параллельно якорю, как показано на рисунке ниже:
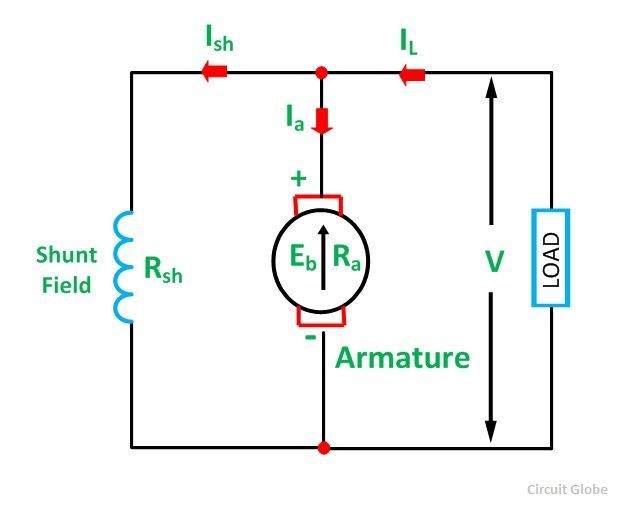
Двигатель постоянного тока с параллельной обмоткой
Уравнения тока, напряжения и мощности для параллельного двигателя записываются следующим образом.
Применяя KCL на разветвлении A на рисунке выше.
Сумма входящих токов при A = Сумма исходящих токов при A.

Где,
I — ток входной линии
Ia — ток якоря
Ish — ток возбуждения шунта
Уравнение (1) является текущим уравнением.
Уравнения напряжения записываются с использованием закона напряжения Кирхгофа (KVL) для цепи обмотки возбуждения.
Для цепи обмотки якоря уравнение будет иметь вид:

Уравнение мощности имеет вид:
Потребляемая мощность = развиваемая механическая мощность + потери в якоре + потери в поле.
Умножая уравнение (3) на Ia, получаем следующие уравнения.
Где,
VI a — электрическая мощность, подаваемая на якорь двигателя.
Мотор с обмоткой серии
В последовательном двигателе обмотка возбуждения соединена последовательно с обмоткой якоря. Схема подключения представлена ниже:
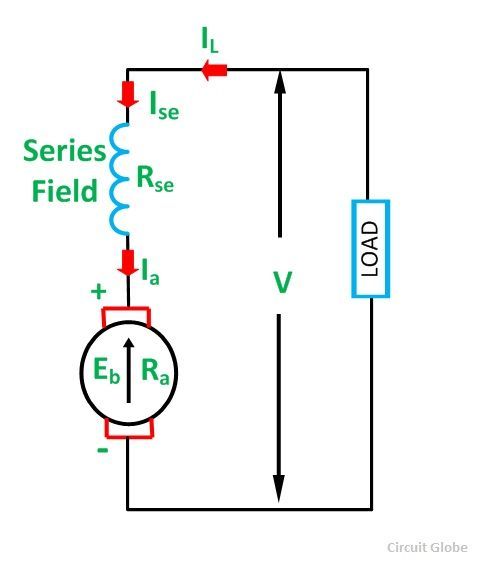 Двигатель серии
Двигатель серии
с обмоткой
Применяя KCL на рисунке выше:
Где,
I se — последовательный ток возбуждения
Уравнение напряжения можно получить, применив KVL на рисунке выше.

Уравнение мощности получается умножением уравнения (8) на I, получаем

Потребляемая мощность = развиваемая механическая мощность + потери в якоре + потери в поле

Сравнивая уравнение (9) и (10), мы получим уравнение, показанное ниже:
Мотор с комбинированной обмоткой
Двигатель постоянного тока, имеющий как шунтирующие, так и последовательные обмотки возбуждения, называется составным двигателем .Схема подключения составного двигателя показана ниже:
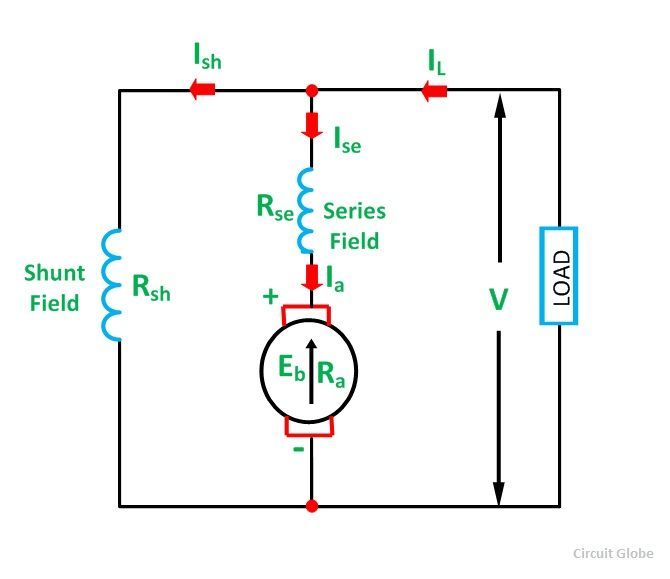
Комбинированный двигатель
Составной двигатель далее подразделяется на Накопительный составной двигатель и Дифференциальный составной двигатель . В кумулятивном составном двигателе магнитный поток, создаваемый обеими обмотками, имеет одинаковое направление, т.е.
В дифференциальном составном двигателе поток, создаваемый последовательными обмотками возбуждения, противоположен потоку, создаваемому шунтирующей обмоткой возбуждения, т.е.е.
Знак «плюс» и «минус» указывает направление потока, создаваемого в обмотках возбуждения.
.