Каким должен быть регистратор аварийных событий для цифровых подстанций? Регистратор аварийных событий
Система регистрации аварийных событий (РАС)
Система регистрации аварийных событий (РАС) предназначена для измерения, вычисления, архивирования и предоставления электрических параметров электроустановок в номинальном и аварийном режимах. Анализ данной информации позволяет определить причину возникновения аварийного режима, произвести оценку правильности работы устройств РЗиА и ПА, разработать комплекс мероприятий для предупреждения развития аварийного режима.
Информация от системы РАС используется на уровне объекта внедрения при эксплуатации контролируемых электроустановок и на уровне Системного Оператора при расследовании произошедших аварийных событий.
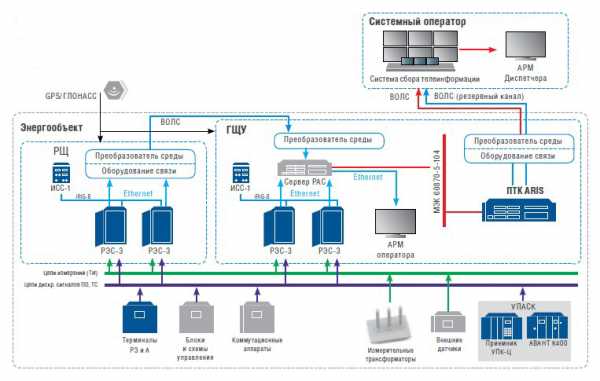
На рисунке 1 изображена типовая структурная схема системы регистрации аварийных событий (РАС) электрогенерирующего предприятия. Основными компонентами системы РАС являются:
Регистратор РЭС-3 представляет собой микропроцессорное устройство с модульной структурой. Тип и набор модулей определяется на этапе проектирования в соответствии с техническими требованиями объекта внедрения. РЭС-3 размещаются в помещениях для установки устройств РЗиА: на релейном щите (РЩ) и на главном щите управления (ГЩУ).
Аналоговые цепи РЭС-3 (ТИ) подключаются к измерительным трансформаторам напряжения и тока (ТН и ТТ), внешним измерительным преобразователям. РЭС-3 регистрирует дискретные сигналы (ТС, ПО) от устройств релейной защиты и автоматики (РЗиА), от шкафов противоаварийной автоматики управления электрооборудованием (МКПА), непосредственно с коммутационных аппаратов (КА), а также от устройств передачи аварийных сигналов и команд (УПАСК).
Запуск РЭС-3 для осциллографирования электрических параметров аварийного режима выполняется от изменения значений входных аналоговых сигналов относительно уставки и изменения состояния одного или нескольких входных дискретных сигналов.
Тип данных, которые использует РЭС-3 для представления:
- мгновенные значения аналоговых и дискретных сигналов с частотой дискретизации до 2000 Гц на канал — для осциллографирования номинальных и аварийных режимов;
- действующие значения на периоде промышленной частоты — в качестве замещающей информации для ПТК СОТИАССО.
Сервер РАС представляет собой компьютер или сервер под управлением операционной системы Microsoft Windows (Server).
Основными функциями сервера РАС являются:
- предоставление электрических параметров номинальных режимов электрооборудования по сетевым протоколам OPC DA или МЭК 60870-5-104;
- хранение и предоставление по сетевому протоколу FTP электрических параметров аварийных режимов электрооборудования с глубиной хранения до 3 лет;
- файлы настройки регистраторов РЭС-3.
Регистраторы РЭС-3 и сервер РАС объединены в технологическую ЛВС РАС, построенную на базе стека протоколов TCP / IP. Для сопряжения ЛВС РАС с ЛВС сторонних автоматизированных информационных систем объекта внедрения применяется технология виртуальных ЛВС — VLAN.
Система обеспечения единого времени (СОЕВ) обеспечивает РЭС-3 метками точного времени для регистрации электрических параметров с точностью не хуже 1 мс. Это свойство обеспечивает анализ информации от нескольких РЭС-3 не только в рамках одного объекта, но и от РЭС-3 разных объектов.
Дополнительным компонентом системы РАС является автоматизированное рабочее место оператора (АРМ) с установленным программным обеспечением SignW. АРМ используется для настройки и диагностики работоспособности системы РАС, предоставления измеренных параметров.
Рисунок 1. Схема системы регистрации аварийных событий
Регистратор РЭС-3 представляет собой микропроцессорное устройство с модульной структурой. Тип и набор модулей определяется на этапе проектирования в соответствии с техническими требованиями объекта внедрения. РЭС-3 размещаются в помещениях для установки устройств РЗиА: на релейном щите (РЩ) и на главном щите управления (ГЩУ).
Аналоговые цепи РЭС-3 (ТИ) подключаются к измерительныым трансформаторам напряжения и тока (ТН и ТТ),внешним измерительным преобразователям. РЭС-3 регистрирует дискретные сигналы (ТС, ПО) от устройств релейной защиты и автоматики (РЗиА), от шкафов противоаварийной автоматики управления электрооборудованием (МКПА), непосредственно с коммутационных аппаратов (КА), а также от устройств передачи аварийных сигналов и команд (УПАСК).
Запуск РЭС-3 для осциллографирования электрических параметров аварийного режима выполняется от изменения значений входных аналоговых сигналов относительно уставки и изменения состояния одного или нескольких входных дискретных сигналов.
Тип данных, которые использует РЭС-3 для представления:
- мгновенные значения аналоговых и дискретных сигналов с частотой дискретизации до 2000 Гц на канал – для осциллографирования номинальных и аварийных режимов;
- действующие значения на периоде промышленной частоты – в качестве замещающей информации для ПТК СОТИАССО.
Сервер РАС представляет собой компьютер или сервер под управлением операционной системы Microsoft Windows (Server).
Основными функциями сервера РАС являются:
- предоставление электрических параметров номинальных режимов электрооборудования по сетевым протоколам OPC DA или МЭК 60870-5-104;
- хранение и предоставление по сетевому протоколу FTP электрических параметров аварийных режимов электрооборудования с глубиной хранения до 3 лет;
- файлы настройки регистраторов РЭС-3.
Регистраторы РЭС-3 и сервер РАС объединены в технологическую ЛВС РАС, построенную на базе стека протоколов TCP/IP. Для сопряжения ЛВС РАС с ЛВС сторонних автоматизированных информационных систем объекта внедрения применяется технология виртуальных ЛВС – VLAN.
Система обеспечения единого времени (СОЕВ) обеспечивает РЭС-3 метками точного времени для регистрации электрических параметров с точностью не хуже 1 мс. Это свойство обеспечивает анализ информации от нескольких РЭС-3 не только в рамках одного объекта, но от РЭС-3 разных объектов.
Дополнительным компонентом системы РАС является автоматизированное рабочее место оператора (АРМ) с установленным программным обеспечением SignW. АРМ используется для настройки и диагностики работоспособности системы РАС, предоставления измеренных параметров.
www.prosoftsystems.ru
Регистратор аварийных событий цифровых подстанций
Вопросы заданные по способам функционирования и функциям РАС для «ЦПС» крайне актуальны. В настоящее время начали реализовываться первые РАС принимающие потоки SV и GOOSE сообщения. Но перед тем как ответить на вопрос как получать информацию в РАС я хотел бы переосмыслить весь подход к РАС, который не менялся с эпохи светолучевых осциллографов.
Задача узнать параметры аварийного режима появилась сразу при появлении релейной защиты для проверки правильности её работы. Для этих задач и для задач ОМП были созданы стрелочные фиксаторы тока 3I0 – АИ2 потом появились ФИП, но этого явно было недостаточно.
Первыми РАС были НО 11 светолучевые осциллографы сохранявшие параметры токов и напряжений на фотоплёнку потом появились НО 13, писавшие на фотобумагу. Апофеозом стали НО 22, писавшие на магнитный барабан токи и напряжения и переводящие потом на бумагу благодаря чему стала возможна запись предаварийного режима небольшой длительности. Все эти устройства были созданы для одного: зафиксировать процесс КЗ, который ранее не фиксировался нигде.
В 90 –х годах 20 столетия начали появляться первые микропроцессорные устройства РАС. Без идеологии со стороны эксплуатации они вылились в различные варианты от «Черного ящика» с 8 аналоговыми входами и распределённой системой установки периферийных блоков до единых систем АУРА с 128 аналоговыми входами, заведёнными в один шкаф. Наличие дискретных входов в устройствах РАС позволяло заводить контакты выходных и указательных реле. Появились указательные реле РУ 21 с герконом на катушке, позволявшие заводить сигнал в РАС. К новым устройствам привыкли быстро, ведь они имели огромные преимущества: нет необходимости закупать фото бумагу и реактивы (к тому времени они стали дефицитны), не нужно делать достаточно сложное техобслуживание, скорость передачи информации по электронным каналам возросла. При появлении микропроцессорных терминалов РЗА с функциями РАС от отдельных РАС не отказались по одной простой причине – новые терминалы были не опробованы и опыт эксплуатации отсутствовал. Так появились решения, где МП терминалы устанавливались рядом с РАС. При этом смотреть осциллограмму терминала РЗА нужно было для понятия процессов терминала, а осциллограмму РАС – для проверки.
Спорность данного решения очевидна. Была нарушена цель создания РАС – зафиксировать процесс, ранее не фиксировавшийся. В настоящее время при расследовании КЗ мы можем оперировать 5-ю и более осциллограммами: три терминала – РЗА, РАС, ОМП. И все фиксируют одно и тоже. Для повторной фиксации тянуться километры кабелей, ставятся шкафы, увеличивается потребление собственных нужд и человеко/часы на обслуживание. Выявить неисправность терминала, можно по осциллограмме второго и третьего терминала, тогда почему РАС остаётся востребованным на современных ПС с переизбытком информации. Основная роль РАС в настоящее время – это расследование аварии по синхронным параметрам токов и напряжений, где возможно одновременно посмотреть токи, напряжения и дискретные сигналы нескольких присоединений привязанные к одному времени, располагая их на одном экране.
Давайте проанализируем, что же представляет из себя «Цифровая ПС» и какой РАС нужен эксплуатации. Нужно отметить что «ЦПС» имеет явный избыток и фиксацию всех параметров работы МП терминалов РЗА. Токи и напряжения поступают от одного дублированного источника по цифре, все дискретные сигналы передаются GOOSE сообщениями и фиксируются в памяти терминала, синхронизация времени улучшилась с 1 мс до 4 мкс. Приём информации на дискретные входы и выдача управляющих воздействий уменьшилась до минимума (положения КА и их исправность, механические защиты маслонаполненного оборудования, управление КА и РПН). При этом все сигналы, передающиеся медными проводами продублированы. Мы имеем терминалы защит, подписанные на два SV потока с возможностью перехода между ними, имеем фиксацию отправки GOOSE—сообщения на терминале РЗА выступающем сервером и имеем фиксацию GOOSE – сообщения на клиенте, то есть фиксация с контролем. С одной стороны уже имеются попытки создать РАС для «ЦПС» – сервер, подписанный на SV потоки и GOOSE—сообщения, записывающий гигабайты информации и выстраивающий все сигналы в одну осциллограмму. С точки зрения традиционных методов РАС всё нормально, тем более что вопрос с ёмкостью жестких дисков давно отпал. Но для анализа технологического нарушения более важно и нужна информация непосредственно с устройств, выдающих управляющие воздействия.
Как я вижу РАС «ЦПС»:
Это программно-аппаратный комплекс выполняющий функцию автоматического скачивания аналоговой и дискретной информации со всех устройств РЗА и сводящий с помощью меток времени в единую осциллограмму. Аналоговые сигналы должны быть представлены без дублирования одних и тех же токов и напряжений одного присоединения с разных устройств. При получении осциллограмм система автоматически должна быть проведена проверка на соответствие однотипных аналоговых сигналов, друг другу, поступивших с разных устройств. При несоответствии аналоговых сигналов должны быть показаны отличия. Дискретные сигналы должны отображаться на осциллограмме с метками времени ухода GOOSE сообщения от терминала РЗА выступающего в роли сервера и приёма сигнала клиентом. При этом необходимо показать время прихода GOOSE сообщения к каждому клиенту. Должна быть подгружена информация о неисправностях и отклонениях в работе терминала РЗ посредством отчетов.
Система РАС должна стать программой, которая берёт информацию из первоисточников (оптических ТТ, электронных ТН, AMU, DMU, терминалов РЗА и т.д.) и сводит её в единую осциллограмму с учётом загруженного SCD файла «ЦПС».
Система РАС должна проверять параметры работы ЦПС: время доставки SV пакетов до клиента, время доставки GOOSE сообщения до клиентов, достоверность параметров SV пакетов и GOOSE сообщений, работу системы синхронизации времени, исправность локальной сети.
С помощью пуска встроенных осциллографов и записи срабатывания пусковых органов защит (МТЗ, ДЗ, ТНЗНП) система должна проверять правильность функционирования терминалов РЗА и построение схемы потокораспределения для проверки функционирования первичных датчиков аналоговых сигналов «ЦПС» и правильности расчёта токов КЗ в ПО «АРМ РЗА».
Действия для создания РАС:
- Создать ТЗ на РАС «ЦПС».
- Выработать новые требования к терминалам защит с учётом требований РАС.
- Создать опытную «ЦПС» и проверить функционирование системы.
Наверняка найдутся противники данной концепции, которые будут утверждать о необходимости дублирования информации, о независимой записи всего и вся. Но я считаю, что потеря какой-то информации крайне маловероятна, так как практически все серверы (источники информации) продублированы.
Исходя из вышесказанного, можно сделать вывод, что система РАС для «ЦПС» должна строится как система для воссоздания последовательности событий в единой осциллограмме и контроля исправности защит.
digitalsubstation.com
Регистратор аварийных событий «НЕВА-РАС» | НПФ "ЭНЕРГОСОЮЗ"
Пуск регистратора аварийных событий (РАС) выполняется по уставкам аналоговых сигналов, изменению состояния инициативных дискретных сигналов, по команде с АРМ РАС или с АРМ АСУ ТП. Регистратор по каждому вводу аналогового сигнала производит сравнение уровня мгновенного значения сигнала с заданными уставками, хранимыми в памяти. При превышении любым сигналом заданной уставки, формируется сигнал на пуск осциллографа с записью аварийного файла.
После изменения состояния дискретного сигнала на вводе, регистратор формирует сигнал пуска осциллографа, если данный сигнал задан в настройках как инициативный. Интервал записи последовательных дискретных сигналов составляет не более 1 мс. В регистраторе предусмотрена возможность установки программного фильтра «защиты от дребезга» для каждого дискретного входа.
Время пуска осциллографа и начало записи аварийного файла регистрируется как событие указанием даты и времени пуска в формате ДД.ММ.ГГГГ ЧЧ:ММ:СС:МС. Все данные, передаваемые регистратором аварийных событий на ПК, имеют метку астрономического времени с точностью не хуже 1,0 мс.
Программа обработки и просмотра осциллограммы на АРМ отображает расчётные аналоговые сигналы – как полученные с РАС, так и рассчитанные программой автоматически или по требованию оператора АРМ (значения симметричных составляющих напряжений и токов прямой, обратной и нулевой последовательностей, активной и реактивной мощности, частоты, и др.).
По окончании записи, файл осциллограммы автоматически передаётся по сети Ethernet на сервер РАС, внешний АРМ или встроенный АРМ РАС. Передача данных не влияет на выполнение других функций регистратора, в том числе на запись повторной аварии.
Выполнение функций регистрации аварийных событий обеспечивается при помощи встроенного программного обеспечения контроллера РАС, а также базового комплекта программного обеспечения:
- программа «Нева». Программа устанавливается на сервере РАС (на ПК, выполняющем роль сервера РАС) и в автоматическом режиме осуществляет обмен данными с регистратором;
- программа «Осциллограф». Программа обеспечивает просмотр, анализ и печать осциллограммы, записанной устройством РАС, и поддерживает международный формат Comtrade;
- программа «Таблица событий». Программа в табличном виде отображает информацию об изменении состояния дискретных сигналов, подключённых к регистратору
- программа «Конфигуратор». Программа предназначена для настройки параметров регистратора, как с персонального компьютера (ПК), входящего в состав РАС, так и с внешнего ПК, предназначенного для отображения результатов функций регистратора или с АРМ инженера РЗА.
Конструктивное исполнение
- Регистратор «НЕВА-РАС» в 19-ти дюймовом исполнении.
Регистраторы в таком исполнении выпускаются в трех вариантах (6U,9U,12U) и имеют модульную структуру. Модули и интерфейсные блоки ввода сигналов расположены внутри устройства таким образом, чтобы обеспечить их удобное обслуживание и замену. Все микропроцессорные платы размещены за передней панелью, блоки ввода аналоговых и ввода/вывода дискретных сигналов – в слотах с обратной стороны корпуса РАС. В устройстве предусмотрена возможность подключения внешних измерительных преобразователей и дискретных сигналов.
- Регистратор «НЕВА-РАС» в напольном и навесном исполнении.
Регистраторы выполнены в виде металлических шкафов. С лицевой (если необходимо, то и с обратной – в случае напольной стойки) стороны шкафа регистратора расположена дверь, снабжённая запирающимся на ключ замком. На внутренней стороне двери размещена кассета для хранения документации, а также закреплена таблица присоединения входных сигналов.
Средства местного контроля и управления, а также порты для подключения переносного компьютера, порты для постоянных каналов связи с АСУ ТП объекта и центрами управления располагаются на лицевой стороне конструктива РАС. Клеммы подключения цепей питания, дискретных и аналоговых входов и дискретных выходов, – на задней стороне конструктива.
Регистратор обеспечивает ввод и хранение в цифровом виде аналоговых сигналов, подключённых к входам. Если используются внешние измерительные преобразователи, то их нормированные выходы подключаются к клеммному ряду Х1. На клеммный ряд Х2 подаются аналоговые сигналы со вторичных обмоток трансформаторов тока и напряжения объекта (1 или 5 А и 100 В). Измерительные преобразователи в этом случае располагаются внутри шкафа РАС. Через модуль ввода аналоговых сигналов производится передача сигналов на обработку в контроллер.
Дискретные электрические сигналов подключаются к входам (клеммный ряд Источниками дискретных сигналов служат «сухие» контакты реле и другой аппаратуры энергообъекта. Дискретные входы РАС могут быть переключены на приём «потенциала». Дискретные сигналы передаются на обработку в контроллер через модуль ввода дискретных сигналов. Все входы РАС, подключаемые через клеммные ряды зажимов Х2…Х4, имеют гальваническую развязку.
Подвод питающих и сигнальных кабелей производится с нижней части шкафа через резиновую проходную панель, обеспечивающую герметизацию.
Для работы в неотапливаемых помещениях регистраторы могут комплектоваться системой поддержания температуры, размещаемой на дверце шкафа.
Сравнительные технические характеристики РАС в зависимости от конструктивного исполнения
Конструктивное исполнение | РАС в конструктиве 19" дюймов | Напольный РАС | Навесной РАС |
Кол-во входных сигналов в максимальной конфигурации, аналоговые/дискретные | в корпусе 6U* - 32/96; 0/288; в корпусе 9U* - 64/168; 44/288; в корпусе 12U* - 64/288+24 норм. режима, 64/240+32 норм. режима. *- промежуточные конфигурации смотри в ТИ | 128/576 | 64/288 + 96 норм. режима |
Габаритные размеры, мм | в корпусе 6U- 483x267x306; в корпусе 9U - 483x400x306; в корпусе 12U - 483x533x306. | 800x2200x600 | 600×1000×250 |
Питание, В | ~/=220 (от модуля питания МЭП 100-24, вынесен из корпуса устройства) | ~/=220, =110 | ~/=220, =110 |
Потребляемая мощность, ВА, не более | 80 | 200 | 100 |
| Масса, кг, не более | 15 | 200 | 65 |
| Степень защиты по ГОСТ 14254-96 | IP20 | IP54 | P65 |
www.energosoyuz.spb.ru
Система регистрации аварийных событий | НПФ "ЭНЕРГОСОЮЗ"
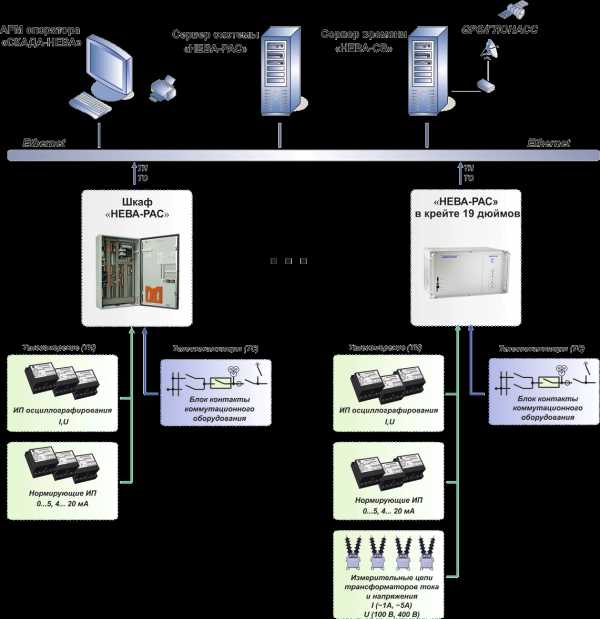
Количество регистрируемых аналоговых и дискретных сигналов, подключаемых к каждому регистратору «НЕВА-РАС», может варьироваться в пределах, указанных в технических данных и может быть увеличено в процессе эксплуатации до предельных значений путем установки дополнительных модулей ввода/вывода сигналов.
В регистраторе «НЕВА-РАС» используются выносные датчики для ввода токов и напряжений, обеспечивающие достаточный уровень сигналов для регистрации как сверхтоков, так и нормальных токов и напряжений. Это позволяет с помощью этих же датчиков производить расчет действующих значений токов и напряжений программным путем.
Помимо аналоговых входов осциллографирования, в каждом регистраторе могут присутствовать входы для сигналов нормального стационарного режима. Это могут быть любые относительно медленно меняющиеся величины, например, мощности, температуры, давления и т.п. Для измерений параметров нормального режима в ПТК могут одновременно использоваться сигналы различных измерительных преобразователей (ИП) – аналоговых ИП осциллографирования и аналоговых ИП нормального режима.
Регистратор аварийных событий «НЕВА-РАС» обеспечивает ввод большого числа дискретных сигналов. Любой из них может присутствовать в осциллограмме, а также в табличной распечатке ведомости событий. Для запуска процесса осциллографирования может быть инициативным любой сигнал.
Измеряемые сигналы всех типов от всех регистраторов образуют единое информационное пространство. Это означает, что любые данные доступны для отображения и анализа в удобном для пользователя виде с помощью программного обеспечения «СКАДА-НЕВА» на всех рабочих станциях системы. Система регистрации аварийных событий может содержать от 1 до 63 регистраторов «НЕВА-РАС».
Отличительные особенности
Допускается удаленное расположение преобразователей от регистраторов «НЕВА-РАC», поэтому удлинение вторичных цепей не требуется.
- Преобразователи могут быть установлены там, где это удобно, в том числе внутри шкафов.
- Передача данных в ЛВС, сервер или АРМ производится одновременно с записью осциллограммы.
- Осциллограмма доступна для анализа сразу после окончания аварийного процесса.
Структура системы РАС
www.energosoyuz.spb.ru
Каким должен быть регистратор аварийных событий для цифровых подстанций?
31 января 2016
По каким протоколам стандарта МЭК 61850 сигналы должны передаваться в РАС цифровой подстанции? Как должна изменится архитектура РАС цифровой подстанции в будущем? Отвечают эксперты.
Все мнения, представленные в данной статье – личные мнения каждого специалиста в частности, и никак не отражают позиций компании
В одном из реализуемых проектов (где использовался МЭК 61850-8-1 в части GOOSE и MMS, без МЭК 61850-9-2LE) возникла следующая ситуация: появились ограничения по количеству сигналов, которые можно было выводить с терминалов РЗА для автономного РАС посредством дискретных выходов. Автономный РАС, который использовался на объекте, поддерживал GOOSE (ровно, как и терминалы) и было предложено передавать недостающие сигналы в него по этому протоколу. С другой стороны, возможен и другой вариант передачи недостающих данных в РАС – посредством отчетов (MMS). Возникает вопрос о том, как должен быть реализован сбор сигналов на РАС для такой гибридной конфигурации (передача дискретных сигналов по меди и по цифре в рамках одного энергообъекта):
- Как передавать сигналы в РАС – по GOOSE или посредством отчетов (MMS)? Или комбинировать два способа?
- Если по GOOSE, следует использовать «рабочие сообщения», которые используются терминалами при информационном обмене для выполнения прикладных функций или создавать отдельные сообщения для РАС с теми же сигналами?
- Если по отчетам, использовать буферизируемые/не буферизируемые отчеты?
- Какие требования должны быть предъявлены к набору данных GOOSE/отчетов (количество сигналов в одной посылке (если отдельный GOOSE для РАС), наличие метки времени для самого сигнала, признака качества)?
Вторая часть вопроса касается видоизменения РАС на полноценной цифровой подстанции:
- Как должен изменится функционал РАС на ЦПС с МЭК 61850-8-1 и 9-2?
- Должна ли изменится архитектура (сохранение автономного РАС/использование функций РАС в терминалах/другое)?
- Как должен производиться сбор данных (изменения относительно сбора данных в гибридной конфигурации по первой части вопросов) с учетом наличия измерений в формате МЭК 61850-9-2?
Эти вопросы мы задали специалистам – представителям различных энергетических компаний России, Республики Беларусь и Казахстана.
 Максим ГрибковПАО «МОЭСК»
Максим ГрибковПАО «МОЭСК»
Регистратор аварийных событий должен быть независимым устройством, получающим самую объективную информацию с присвоенными метками времени и синхронизированными сигналами. Поэтому на ЦПС с использованием оптических ТТ и ТН передача сигналов в РАС должна осуществляться по GOOSE, в случае применения MU регистратор должен подключаться к аналоговым цепям в шкафу, где установлен MU.
Для обеспечения достоверности данных следует использовать «рабочие сообщения» и при необходимости создавать отдельные сообщения для РАС.
При использовании отдельных GOOSE для РАС, должна быть обеспечена сохранность каждого сигнала, наличие метки времени для самого сигнала, признака качества.
При применении на ЦПС МЭК 61850-8-1 и 9-2 функционал РАС может быть изменен только в сторону повышения информативности. Как упомянуто ранее, на ЦПС с использованием оптических ТТ и ТН передача сигналов в РАС должна осуществляться по GOOSE, в случае применения MU регистратор должен подключаться к аналоговым цепям в шкафу, где установлен MU.
При этом на полноценной ЦПС РАС должен оставаться автономным. Использование функций РАС в терминалах РЗиА возможно только как дополнительная информация. РАС должен быть независимым устройством, имеющим самую объективную информацию с присвоенными метками времени и синхронизированными сигналами, позволяющим выполнить анализ работы как первичного, так и вторичного оборудования.
Регистрация всех сигналов должна осуществляться по всем каналам одновременно и синхронно, независимо от того, какой канал был пусковым.
 Андрей ШеметовПАО «ФСК ЕЭС»
Андрей ШеметовПАО «ФСК ЕЭС»
Вопросы заданные по способам функционирования и функциям РАС для «ЦПС» крайне актуальны. В настоящее время начали реализовываться первые РАС принимающие потоки SV и GOOSE сообщения. Но перед тем как ответить на вопрос как получать информацию в РАС я хотел бы переосмыслить весь подход к РАС, который не менялся с эпохи светолучевых осциллографов.
Задача узнать параметры аварийного режима появилась сразу при появлении релейной защиты для проверки правильности её работы. Для этих задач и для задач ОМП были созданы стрелочные фиксаторы тока 3I0 – АИ2 потом появились ФИП, но этого явно было недостаточно.
Первыми РАС были НО 11 светолучевые осциллографы сохранявшие параметры токов и напряжений на фотоплёнку потом появились НО 13, писавшие на фотобумагу. Апофеозом стали НО 22, писавшие на магнитный барабан токи и напряжения и переводящие потом на бумагу благодаря чему стала возможна запись предаварийного режима небольшой длительности. Все эти устройства были созданы для одного: зафиксировать процесс КЗ, который ранее не фиксировался нигде.
В 90 –х годах 20 столетия начали появляться первые микропроцессорные устройства РАС. Без идеологии со стороны эксплуатации они вылились в различные варианты от «Черного ящика» с 8 аналоговыми входами и распределённой системой установки периферийных блоков до единых систем АУРА с 128 аналоговыми входами, заведёнными в один шкаф. Наличие дискретных входов в устройствах РАС позволяло заводить контакты выходных и указательных реле. Появились указательные реле РУ 21 с герконом на катушке, позволявшие заводить сигнал в РАС. К новым устройствам привыкли быстро, ведь они имели огромные преимущества: нет необходимости закупать фото бумагу и реактивы (к тому времени они стали дефицитны), не нужно делать достаточно сложное техобслуживание, скорость передачи информации по электронным каналам возросла. При появлении микропроцессорных терминалов РЗА с функциями РАС от отдельных РАС не отказались по одной простой причине – новые терминалы были не опробованы и опыт эксплуатации отсутствовал. Так появились решения, где МП терминалы устанавливались рядом с РАС. При этом смотреть осциллограмму терминала РЗА нужно было для понятия процессов терминала, а осциллограмму РАС – для проверки.
Спорность данного решения очевидна. Была нарушена цель создания РАС – зафиксировать процесс, ранее не фиксировавшийся. В настоящее время при расследовании КЗ мы можем оперировать 5-ю и более осциллограммами: три терминала – РЗА, РАС, ОМП. И все фиксируют одно и тоже. Для повторной фиксации тянуться километры кабелей, ставятся шкафы, увеличивается потребление собственных нужд и человеко/часы на обслуживание. Выявить неисправность терминала, можно по осциллограмме второго и третьего терминала, тогда почему РАС остаётся востребованным на современных ПС с переизбытком информации. Основная роль РАС в настоящее время – это расследование аварии по синхронным параметрам токов и напряжений, где возможно одновременно посмотреть токи, напряжения и дискретные сигналы нескольких присоединений привязанные к одному времени, располагая их на одном экране.
Давайте проанализируем, что же представляет из себя «Цифровая ПС» и какой РАС нужен эксплуатации. Нужно отметить что «ЦПС» имеет явный избыток и фиксацию всех параметров работы МП терминалов РЗА. Токи и напряжения поступают от одного дублированного источника по цифре, все дискретные сигналы передаются GOOSE сообщениями и фиксируются в памяти терминала, синхронизация времени улучшилась с 1 мс до 4 мкс. Приём информации на дискретные входы и выдача управляющих воздействий уменьшилась до минимума (положения КА и их исправность, механические защиты маслонаполненного оборудования, управление КА и РПН). При этом все сигналы, передающиеся медными проводами продублированы. Мы имеем терминалы защит, подписанные на два SV потока с возможностью перехода между ними, имеем фиксацию отправки GOOSE—сообщения на терминале РЗА выступающем сервером и имеем фиксацию GOOSE – сообщения на клиенте, то есть фиксация с контролем. С одной стороны уже имеются попытки создать РАС для «ЦПС» – сервер, подписанный на SV потоки и GOOSE—сообщения, записывающий гигабайты информации и выстраивающий все сигналы в одну осциллограмму. С точки зрения традиционных методов РАС всё нормально, тем более что вопрос с ёмкостью жестких дисков давно отпал. Но для анализа технологического нарушения более важно и нужна информация непосредственно с устройств, выдающих управляющие воздействия.
Как я вижу РАС «ЦПС»: Это программно-аппаратный комплекс выполняющий функцию автоматического скачивания аналоговой и дискретной информации со всех устройств РЗА и сводящий с помощью меток времени в единую осциллограмму. Аналоговые сигналы должны быть представлены без дублирования одних и тех же токов и напряжений одного присоединения с разных устройств. При получении осциллограмм система автоматически должна быть проведена проверка на соответствие однотипных аналоговых сигналов, друг другу, поступивших с разных устройств. При несоответствии аналоговых сигналов должны быть показаны отличия. Дискретные сигналы должны отображаться на осциллограмме с метками времени ухода GOOSE сообщения от терминала РЗА выступающего в роли сервера и приёма сигнала клиентом. При этом необходимо показать время прихода GOOSE сообщения к каждому клиенту. Должна быть подгружена информация о неисправностях и отклонениях в работе терминала РЗ посредством отчетов.
Система РАС должна стать программой, которая берёт информацию из первоисточников (оптических ТТ, электронных ТН, AMU, DMU, терминалов РЗА и т.д.) и сводит её в единую осциллограмму с учётом загруженного SCD файла «ЦПС».
Система РАС должна проверять параметры работы ЦПС: время доставки SV пакетов до клиента, время доставки GOOSE сообщения до клиентов, достоверность параметров SV пакетов и GOOSE сообщений, работу системы синхронизации времени, исправность локальной сети.
С помощью пуска встроенных осциллографов и записи срабатывания пусковых органов защит (МТЗ, ДЗ, ТНЗНП) система должна проверять правильность функционирования терминалов РЗА и построение схемы потокораспределения для проверки функционирования первичных датчиков аналоговых сигналов «ЦПС» и правильности расчёта токов КЗ в ПО «АРМ РЗА».
Действия для создания РАС: Создать ТЗ на РАС «ЦПС». Выработать новые требования к терминалам защит с учётом требований РАС. Создать опытную «ЦПС» и проверить функционирование системы.
Наверняка найдутся противники данной концепции, которые будут утверждать о необходимости дублирования информации, о независимой записи всего и вся. Но я считаю, что потеря какой-то информации крайне маловероятна, так как практически все серверы (источники информации) продублированы.
Исходя из вышесказанного, можно сделать вывод, что система РАС для «ЦПС» должна строится как система для воссоздания последовательности событий в единой осциллограмме и контроля исправности защит.
 Евгений РябцевООО «СВЕЙ»
Евгений РябцевООО «СВЕЙ»
При правильной работе всех аппаратных и программных элементов оборудования можно ожидать отсутствия практической разницы между использованием MMS и GOOSE для целей регистрации. Использование GOOSE будет давать некоторое преимущество в доказательной силе, так как при этом регистратор видит те же данные и в то же время, что и все остальные подписчики GOOSE, снимая некоторые потенциальные возможности для разночтений. В свете сказанного выше, лучше всего максимально использовать «рабочие сообщения» и создавать отдельные сообщения для РАС только в той мере, в которой «рабочие сообщения» не обеспечивают полноты информации.
Так как сообщение GOOSE отправляется сразу же после изменения дискретного сигнала, без каких-либо дополнительных задержек, общая метка времени сообщения GOOSE представляется вполне пригодной аппроксимацией момента изменения всех изменившихся с прошлого сообщения сигналов (нам было бы интересно посмотреть на случаи, когда это не так). Признак качества – более интересный вопрос. К сожалению, не вполне понятно что с ним делать. Места в стандартном COMTRADE для него не предусмотрено, а возможные нестандартные расширения именно нестандартны. Я думаю, тут ещё предстоит выработать некий консенсус.
В целом функционал должен остаться тем же, возможно, с некоторыми дополнительными функциями оценки состояния каналов передачи и достоверности поступающей информации.
Использования функций РАС в терминалах не может быть достаточно для полноценной замены автономного РАС без реализации функций одновременного пуска на запись и автоматического «склеивания» полученных осциллограмм. Если эти функции реализованы, то результат это по сути распределённый РАС, который может быть использован вместе с автономным или вместо него, в зависимости от того, кого Заказчик хочет видеть «сторожащим сторожей».
Что касается видоизменения РАС на полноценной цифровой подстанции – то можно говорить только о количественных изменениях вычислительной мощности и пропускной способности интерфейсов; пассивном получении потоков GOOSE и SV.
 Максим МальцевПАО «РусГидро»
Максим МальцевПАО «РусГидро»
Сигнализация в РАС должна поступать по GOOSE, если сама функция РАС реализована на уровне шины процесса (а это будет правильно).
Целесообразно регистрировать информацию непрерывно, выделяя ее часть по факту наступления аварийного события. Функция РАС должна слушать из сети текущий информационный обмен, отдельные сообщения от терминалов защит в РАС создавать не следует, должны использоваться рабочие сообщения, с метками времени и признаками качества.
Полагаю, что функция РАС останется в виде независимого осциллографа шины процесса. Испытания на Нижегородском полигоне показали необходимость такого осциллографа, непрерывно записывающего потоки 9-2 в шине процесса.
 Михаил ШевалдинГПО «Белэнерго»
Михаил ШевалдинГПО «Белэнерго»
Регистратор аварийных событий (далее – РАС) является одним из камней преткновения в современных реалиях релейной защиты и автоматики (далее – РЗА). Некоторые специалисты активно доказывают, что уже нет никакой необходимости в автономных РАС, так как все требуемые функции уже встроены в цифровые терминалы РЗА, в том числе функции определения места повреждения (ОМП). Другие специалисты, а особенно те, кто уже столкнулся с неправильной работой устройств РЗА, в связи с определенными программными или аппаратными сбоями цифровых устройств, категорически настаивают на обязательной установке именно независимых РАС.
В частности, на одной из ТЭЦ в городе Минске (Беларусь) произошёл аппаратный сбой терминала РЗА ЛЭП 110 кВ, производства одной из ведущих фирм-производителей устройств и аппаратуры РЗА. Микропроцессорный терминал посчитал, что в первичной цепи протекает ток трехфазного короткого замыкания и в соответствии с заданными уставками и алгоритмом работы выдал сигнал на отключение выключателя 110 кВ. Команда на выключатель ушла, и выключатель данного присоединения даже отключился… Но из-за аппаратного сбоя данного терминала устройство продолжило считать, что ток в первичной цепи всё равно есть и могло даже выдать команду УРОВ. Была зима, от шин 110 кВ данной ТЭЦ отходят несколько десятков линий 110 кВ… Трудно даже представить, какие тяжелые последствия имела бы авария в данном случае. Но, благо, УРОВ в Республике Беларусь, на присоединениях 110 кВ выполнен преимущественно централизовано на терминалах ДЗШ, и развития указанной аварии удалось избежать.
Через несколько секунд ток короткого замыкания «исчез» и терминал далее функционировал правильно. Никаких отклонений в его работе послеаварийная проверка не выявила. И если бы не автономный РАС, мы бы не смогли доказать производителю устройства РЗА неправильность работы его устройства. Это лишь один из примеров. Также РАС необходим в процессе анализа крупных аварий с большим числом отключений на одном объекте для правильной оценки работы РЗА. Ещё одной из востребованных функций РАС является наличие функции ОМП, результаты работы которой «релейщики» могут выдать непосредственно дежурному персоналу. А вот разрешать «лезть» в терминалы РЗА за данной информацией для современного оперативного персонала пока рано, в том числе из-за относительно низкой производственной квалификации при их работе с микропроцессорными устройствами РЗА.
Вопрос же от журнала «Цифровая подстанция» стоит немного другой – нужен или нет РАС на новых «цифровых подстанциях»? Тут уже надо принимать во внимание, как организованы аналоговые цепи – с помощью оптических трансформаторов тока и напряжения, или же сигналы от традиционных ТТ и ТН «оцифровываются» с помощью специальных устройств сопряжения. В первом случае, на мой взгляд, организовать отдельные автономные РАС не представляется возможным. РАС всё равно будут подключены к общей шине процесса и будут получать оттуда всю необходимую информацию. Т.е. ни о какой автономности речи уже не идёт, следовательно, наличие отдельного РАС выглядит уже бессмысленным и неоправданным.
Во втором случае, установить РАС можно до условного места преобразования сигнала в «цифровой вид» с помощью специальных устройств сопряжения. В такой ситуации сбор сигналов целесообразно делать в специальном устройстве, установленным непосредственно на ОРУ, а уже с указанного устройства передать данные на общий сервер или центральный модуль. Однако это частный случай (без оптических ТТ и ТН) построения «цифровой подстанции», который, правда, на мой взгляд, будет использоваться еще некоторое время на объектах электроэнергетики Белоруссии и России.
Т.е. уже сама архитектура полноценной «цифровой подстанции» не предполагает наличие автономных РАС. И рассуждать об их наличии/отсутствии представляется, на мой взгляд, довольно непродуктивной задачей.
В процессе анализа аварийных событий необходима точность временных измерений как минимум 1 мс.
Еще хотелось бы прокомментировать вопрос о возможности передачи аналоговых сигналов в РАС посредством отчетов MMS. В процессе анализа аварийных событий необходима точность временных измерений как минимум 1 мс. В то же время, насколько мне известно, общие выборки отчетов MMS формируются с большими периодами дискретизации. Следовательно, получить достоверную информацию для РАС с точностью до 1 мс с помощью сигналов MMS не представляется возможным. Что же касается, так называемых «буферизируемых» отчетов MMS, которые могут «затеряться», если их накопится больше, чем предусмотрена память терминала РЗА, то в таком случае достоверность такой информации вообще ставится под сомнение.
 Юрий ИвановООО «Прософт-Системы»
Юрий ИвановООО «Прософт-Системы»
Если исходить из того, что смысл работы системы РАС – восстановить фактическую последовательность событий во время аварийного процесса, то необходимо использовать GOOSE—сообщения, поскольку посредством MMS мы можем восстановить (с помощью точных меток времени) только логическую последовательность событий: какие сигналы и в какие времена были сформированы терминалами. Вместе с тем необходимо понимать, что время формирования сигнала отличается от фактического времени его появления в шине процесса и от фактического времени его доставки адресату (времени задержки сети). Фактическую последовательность событий мы можем восстановить только с помощью GOOSE—сообщений и только при наличии нескольких условий. Как показали наши исследования, время задержки сети для двух разных получателей одного и того же GOOSE—сообщения может отличаться самым существенным образом. Если при проектировании шины процесса этот момент (детерминированность времени доставки одного и того же GOOSE—сообщения всем адресатам) не учитывался, то фактические времена приема GOOSE—сообщения регистратором и терминалом будут существенно отличаться. Отсюда вывод: при проектировании шины процесса необходимо учитывать такую сугубо практическую особенность цифровой подстанции, как детерминированность времени получения GOOSE-сообщения всеми адресатами, а также потребности системы РАС. Естественным образом, система РАС должна мониторить «рабочие сообщения». Если терминал будет формировать два РАЗНЫХ сигнала: «рабочее» и для РАС, – то сама система РАС теряет смысл.
Если использовать в системе РАС данные MMS, то этот вопрос становится непринципиальным. Если и делать выбор между буферизируемыми и небуферизируемыми отчетами, то только по соображениям, далеким от задач, решаемых системой РАС.
По нашему мнению, все GOOSE-сообщения должны содержать максимум информации. Неизвестно, что в будущем может понадобиться для анализа аварийного процесса.
Что касается полностью цифровых подстанций, мы считаем, что функционал РАС должен измениться самым существенным образом, и в первую очередь это связано с тем, что в рамках цифровой подстанции появляется такой ключевой элемент, как шина процесса (сеть), которая имеет свои технические характеристики и которые нужно мониторить.
Независимая система РАС должна быть обязательно, мало того, по нашему мнению, ее роль на цифровой подстанции возрастает многократно.
Между гибридной и полностью цифровой конфигурацией нет никакой разницы. Если говорить о применении МЭК 61850-9-2, то в любом случае необходима точная синхронизация времени.
 Игорь ВагнерАО «KEGOC»
Игорь ВагнерАО «KEGOC»
Для передачи сигналов в РАС применимы оба способа в любых сочетаниях, но должны соблюдаться следующие требования: наличие меток времени, минимальная нагрузка на шины передачи данных в момент возникновения аварийного события, архивирование событий в одном файле.
С целью обеспечения абсолютной достоверности данных и снижения нагрузки на шины передачи данных, следует использовать «рабочие сообщения».
При использовании MMS отчеты должны быть буферизируемые.
В случае использования отдельных GOOSE для РАС, несколько сигналов может быть сгруппировано в одну посылку, только при обеспечении сохранности для каждого сигнала собственной метки времени и признака качества. Функционал классического РАС должен полностью сохраниться, если мы говорим о его использовании на энергообъектах с полноценной шиной процесса. РАС, а по сути сервер РАС, должен быть «автономным», что обеспечит автоматический сбор сигналов и осциллограмм, их обработку с выдачей отчёта, а также возможность удаленного доступа для ограниченного круга специалистов с целью диагностики, конфигурирования и т.п. При «пуске» РАС, должны «записываться» все сигналы РАС, независимо от того, изменялись они или нет в заданный период времени.
 Алексей ШевелевИЦ «Бреслер»
Алексей ШевелевИЦ «Бреслер»
Я считаю, что сигналы в РАС должны передаваться по средством GOOSE—сообщений. Создавать по всей видимости лучше «отдельные сообщения», но в случае, если достаточно «рабочего сообщения», то можно использовать и его. В общем, это вопрос проектный.
Что же касается требований, предъявляемых к набору данных GOOSE, то я думаю, что наличие сигнала и метки времени является обязательным, в отличие от признака качества.
Скорее всего функционал РАС на ЦПС с МЭК 61850-8-1 и 9-2 принципиально никак не изменится. Но это должен быть «монстровый» терминал. Могут быть добавлены новые функции, связанные с ЦПС—решениями.
Что до архитектуры, то вообще – это решение заказчика, но если говорить об автономном РАС, то всё таки неплохо было бы его иметь.
По-моему мнению приём потока SV с учетом наличия измерений в формате МЭК 61850-9-2 должен производиться по отдельным портам.
Источник: http://digitalsubstation.ru/blog/2016/01/18/registrator-avarijnyh-sobytij-tsifrovyh-podstantsij
www.prosoftsystems.ru
Автономный регистратор аварийных событий для сетей 110-750 кВ
Автономный РАС строится на терминалах БИМ с функцией РАС, объединенных в локальную вычислительную сеть СЛВС ЧЯ с использованием сетевого оборудования и сервера Flan с программным обеспечением «Черный ящик 2000» (ПО ЧЯ).
Специализированная локальная вычислительная сеть "Черный ящик". Руководство по эксплуатации
Возможно построение автономного регистратора для необслуживаемых подстанций с применением технологии удаленного доступа к терминалам БИМ в среде Internet без использования объектового сервера.
С применением сети Ethernet и протокола МЭК 61850-2-1 (GOOS) терминалы БИМ способны регистрировать виртуальные дискретные каналы оборудования сторонних производителей.
Протокол совместных испытаний устройств РЗА «SIPROTEC 4», «SIPROTEC 5» И РАС «Черный ящик 2000»
Пусковые органы
Все БИМ, объединенные в локальную сеть и управляемые ПО ЧЯ, рассматриваются как единое устройство записи. Нарушение любой уставки в любом устройстве БИМ может инициировать записи осциллограмм во всех БИМ одновременно.
Уставки срабатывания осциллографа вводятся в БИМ через информационную сеть.
Каждые 20 мс в терминалах БИМ проверяется соответствие рассчитанных значений амплитуды и симметричных составляющих заданным пороговым значениям – уставкам.
В терминалах работает функция блокировки пускового органа при длительных пусках.
Механизм групп
Для сложных объектов, содержащих в одной информационной сети несколько десятков устройств, подключенных к разным группам оборудования, одновременный запуск всех терминалов может оказаться избыточным. В этом случае используется механизм групп. Применяются 16 независимых групп. Каждый БИМ может принадлежать к одной или нескольким группам одновременно и хранить в своей памяти маску принадлежности к группам. Таким образом, БИМ по нарушению своих уставок будет запускать все устройства, принадлежащие заданным группам и, в свою очередь, пускаться от них.
Сервер УСПД Flan
Сервер сети «Черный ящик» на базе промышленного ПК : Flan – для навесного монтажа, Flan 19” – в стандарте «Евромеханика».
Сервера могут использоваться в варианте холодного или горячего резервирования с применением терминала БИМ в качестве арбитра.
Устройство сбора передачи данных Flan. Руководство по эксплуатации.
Свидетельство об утверждении типа средств измерения
Настройка автономного РАС и анализ осциллограмм
Настройка РАС и анализ осциллограмм в формате ПО ЧЯ, или в формате Comtrade производится с помощью программы BBVIEW.
gosan.ru
регистратор аварийных событий — с английского на русский
управление электропитанием-[Интент]
Управление электропитанием ЦОД
Автор: Жилкина НатальяОпубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.
Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.
Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).
Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.
Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.
Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».
Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.
Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[http://www.computerra.ru/cio/old/products/infrastructure/421312/]
Тематики
- ЦОДы (центры обработки данных)
EN
translate.academic.ru









Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






