
Регулирование яркости светодиодов, принципы ШИМ-регулирования
Регулирование яркости светодиодов, принципы ШИМ-регулирования
В некоторых случаях, например, в фонариках или домашних осветительных приборах, возникает необходимость регулировать яркость свечения.
В некоторых случаях, например, в фонариках или домашних осветительных приборах, возникает необходимость регулировать яркость свечения. Казалось бы, чего уж проще: достаточно изменить ток через светодиод, увеличив или уменьшив сопротивление ограничительного резистора. Но в этом случае на ограничительном резисторе будет расходоваться значительная часть энергии, что совсем недопустимо при автономном питании от батарей или аккумуляторов.
Кроме того, цвет свечения светодиодов будет изменяться: например, белый цвет при понижении тока меньше номинального (для большинства светодиодов 20мА) будет иметь несколько зеленоватый оттенок. Такое изменение цвета в ряде случаев совершенно ни к чему. Представьте себе, что эти светодиоды подсвечивают экран телевизора или компьютерного монитора.
Представьте себе, что эти светодиоды подсвечивают экран телевизора или компьютерного монитора.
Принцип ШИМ – регулирования
В этих случаях применяется ШИМ – регулирование (широтно — импульсное). Смысл его в том, что светодиод периодически зажигается и гаснет. При этом ток на протяжении всего времени вспышки остается номинальным, поэтому спектр свечения не искажается. Уж если светодиод белый, то зеленые оттенки появляться не будут.
К тому же при таком способе регулирования мощности потери энергии минимальны, КПД схем с ШИМ регулированием очень высок, достигает 90 с лишним процентов.
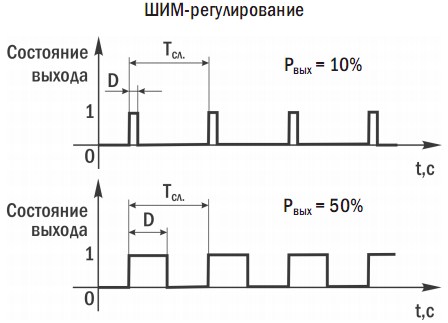
Принцип ШИМ – регулирования достаточно простой, и показан на рисунке 1. Различное соотношение времени зажженного и погашенного состояния на глаз воспринимается как различная яркость свечения: как в кино – отдельно показываемые поочередно кадры воспринимаются как движущееся изображение. Здесь все зависит от частоты проекции, о чем разговор будет чуть позже.
Рисунок 1. Принцип ШИМ – регулирования
Принцип ШИМ – регулирования
На рисунке изображены диаграммы сигналов на выходе устройства управления ШИМ (или задающий генератор). Нулем и единицей обозначены логические уровни: логическая единица (высокий уровень) вызывает свечение светодиода, логический нуль (низкий уровень), соответственно, погасание.
Хотя все может быть и наоборот, поскольку все зависит от схемотехники выходного ключа, — включение светодиода может осуществляться низким уровнем а выключение, как раз высоким. В этом случае физически логическая единица будет иметь низкий уровень напряжения, а логический нуль высокий.
Другими словами, логическая единица вызывает включение какого-то события или процесса (в нашем случае засвечивание светодиода), а логический нуль должен этот процесс отключить. То есть не всегда высокий уровень на выходе цифровой микросхемы является ЛОГИЧЕСКОЙ единицей, все зависит от того, как построена конкретная схема. Это так, для сведения. Но пока будем считать, что ключ управляется высоким уровнем, и по-другому просто быть не может.
Частота и ширина управляющих импульсов
Следует обратить внимание на то, что период следования импульсов (или частота) остается неизменным. Но, в общем, частота импульсов на яркость свечения влияния не оказывает, поэтому, к стабильности частоты особых требований не предъявляется. Меняется лишь длительность (ШИРИНА), в данном случае, положительного импульса, за счет чего и работает весь механизм широтно-импульсной модуляции.
Длительность управляющих импульсов на рисунке 1 выражена в %%. Это так называемый «коэффициент заполнения» или, по англоязычной терминологии, DUTY CYCLE. Выражается отношением длительности управляющего импульса к периоду следования импульсов.
В русскоязычной терминологии обычно используется «скважность» – отношение периода следования к времени импульса. Таким образом если коэффициент заполнения 50%, то скважность будет равна 2. Принципиальной разницы тут нет, поэтому, пользоваться можно любой из этих величин, кому как удобней и понятней.
Здесь, конечно, можно было бы привести формулы для расчета скважности и DUTY CYCLE, но, чтобы не усложнять изложение, обойдемся без формул. В крайнем случае, закон Ома. Уж тут ничего не поделаешь: «Не знаешь закон Ома, сиди дома!». Если уж кого эти формулы заинтересуют, то их всегда можно найти на просторах Интернета.
Частота ШИМ для светорегулятора
Как было сказано чуть выше, особых требований к стабильности частоты импульсов ШИМ не предъявляется: ну, немного «плавает», да и ладно. Подобной нестабильностью частоты, кстати, достаточно большой, обладают ШИМ – регуляторы на базе интегрального таймера NE555, что не мешает их применению во многих конструкциях. В данном случае важно лишь, чтобы эта частота не стала ниже некоторого значения.
А какая должна быть частота, и насколько она может быть нестабильна? Не забывайте, что речь идет о светорегуляторах. В кинотехнике существует термин «критическая частота мельканий». Это частота, при которой отдельные картинки, показываемые друг за другом, воспринимаются как движущееся изображение. Для человеческого глаза эта частота составляет 48Гц.
Для человеческого глаза эта частота составляет 48Гц.
Вот именно по этой причине частота съемки на кинопленке составляла 24кадр/сек (телевизионный стандарт 25кадр/сек). Для повышения этой частоты до критической в кинопроекторах применяется двухлопастной обтюратор (заслонка) дважды перекрывающий каждый показываемый кадр.
В любительских узкопленочных 8мм проекторах частота проекции составляла 16кадр/сек, поэтому обтюратор имел аж три лопасти. Тем же целям в телевидении служит тот факт, что изображение показывается полукадрами: сначала четные, а потом нечетные строки изображения. В результате получается частота мельканий 50Гц.
Работа светодиода в режиме ШИМ представляет собой отдельные вспышки регулируемой длительности. Чтобы эти вспышки воспринимались на глаз как непрерывное свечение, их частота должна быть никак не меньше критической. Выше сколько угодно, но ниже никак нельзя. Этот фактор следует учитывать при создании ШИМ – регуляторов для светильников.
Кстати, просто, как интересный факт: ученые каким-то образом определили, что критическая частота для глаза пчелы составляет 800Гц. Поэтому кинофильм на экране пчела увидит как последовательность отдельных изображений. Для того, чтобы она увидела движущееся изображение, частоту проекции потребуется увеличить до восьмисот полукадров в секунду!
Поэтому кинофильм на экране пчела увидит как последовательность отдельных изображений. Для того, чтобы она увидела движущееся изображение, частоту проекции потребуется увеличить до восьмисот полукадров в секунду!
Функциональная схема ШИМ – регулятора
Для управления собственно светодиодом используется транзисторный ключевой каскад. В последнее время наиболее широко для этой цели используются транзисторы MOSFET, позволяющие коммутировать значительную мощность (применение для этих целей обычных биполярных транзисторов считается просто неприличным).
Такая потребность, (мощный MOSFET — транзистор) возникает при большом количестве светодиодов, например, при использовании светодиодных лент, о которых будет рассказано чуть позже. Если же мощность невелика – при использовании одного – двух светодиодов, можно использовать ключи на маломощных биполярных транзисторах, а при возможности подключать светодиоды непосредственно к выходам микросхем.
На рисунке 2 показана функциональная схема ШИМ – регулятора.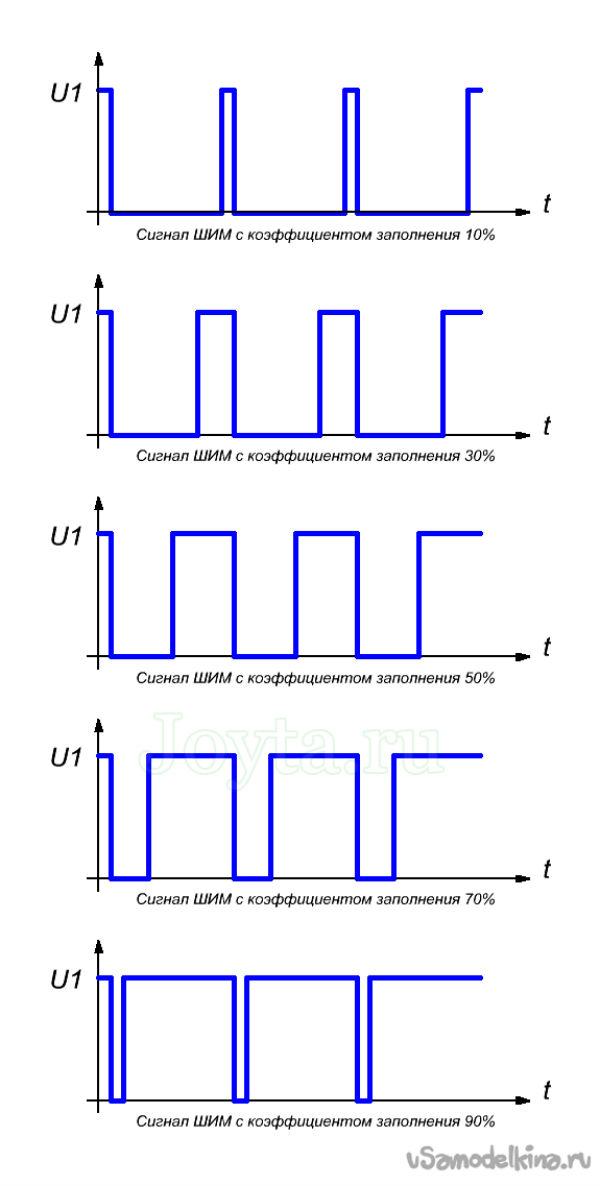 В качестве элемента управления на схеме условно показан резистор R2. Вращением его ручки можно в необходимых пределах изменять скважность управляющих импульсов, а, следовательно, яркость светодиодов.
В качестве элемента управления на схеме условно показан резистор R2. Вращением его ручки можно в необходимых пределах изменять скважность управляющих импульсов, а, следовательно, яркость светодиодов.
Рисунок 2. Функциональная схема ШИМ – регулятора
На рисунке показаны три цепочки последовательно соединенных светодиодов с ограничивающими резисторами. Примерно такое же соединение применяется в светодиодных лентах. Чем длиннее лента, тем больше светодиодов, тем больше потребляемый ток.
Именно в этих случаях потребуются мощные регуляторы на транзисторах MOSFET, допустимый ток стока которых должен быть чуть больше тока, потребляемого лентой. Последнее требование выполняется достаточно легко: например, у транзистора IRL2505 ток стока около 100А, напряжение стока 55В, при этом, его размеры и цена достаточно привлекательны для использования в различных конструкциях.
Задающие генераторы ШИМ
В качестве задающего ШИМ – генератора может использоваться микроконтроллер (в промышленных условиях чаще всего), или схема, выполненная на микросхемах малой степени интеграции. Если в домашних условиях предполагается изготовить незначительное количество ШИМ – регуляторов, а опыта создания микроконтроллерных устройств нет, то лучше сделать регулятор на том, что в настоящее время оказалось под рукой.
Если в домашних условиях предполагается изготовить незначительное количество ШИМ – регуляторов, а опыта создания микроконтроллерных устройств нет, то лучше сделать регулятор на том, что в настоящее время оказалось под рукой.
Это могут быть логические микросхемы серии К561, интегральный таймер NE555, а также специализированные микросхемы, предназначенные для импульсных блоков питания. В этой роли можно заставить работать даже операционный усилитель, собрав на нем регулируемый генератор, но это уж, пожалуй, «из любви к искусству». Поэтому, далее будут рассмотрены только две схемы: самая распространенная на таймере 555, и на контроллере ИБП UC3843.
Схема задающего генератора на таймере 555
Рисунок 3. Схема задающего генератора
Эта схема представляет собой обычный генератор прямоугольных импульсов, частота которого задается конденсатором C1. Заряд конденсатора происходит по цепи «Выход – R2 – RP1- C1 – общий провод». При этом на выходе должно присутствовать напряжение высокого уровня, что равнозначно, что выход соединен с плюсовым полюсом источника питания.
Разряжается конденсатор по цепи «C1 – VD2 – R2 – Выход – общий провод» в то время, когда на выходе присутствует напряжение низкого уровня, — выход соединен с общим проводом. Вот эта разница в путях заряда – разряда времязадающего конденсатора и обеспечивает получение импульсов с регулируемой шириной.
Следует заметить, что диоды, даже одного типа, имеют разные параметры. В данном случае играет роль их электрическая емкость, которая изменяется под действием напряжения на диодах. Поэтому вместе с изменением скважности выходного сигнала меняется и его частота.
Главное, чтобы она не стала меньше критической частоты, о которой было упомянуто чуть выше. Иначе вместо равномерного свечения с различной яркостью будут видны отдельные вспышки.
Приблизительно (опять же виноваты диоды) частоту генератора можно определить по формуле, показанной ниже.
Частота генератора ШИМ на таймере 555.
Если в формулу емкость конденсатора подставить в фарадах, сопротивление в Омах, то результат должен получиться в герцах Гц: от системы СИ никуда не денешься! При этом подразумевается, что движок переменного резистора RP1 находится в среднем положении (в формуле RP1/2), что соответствует выходному сигналу формы меандр. На рисунке 2 это как раз та часть, где указана длительность импульса 50%, что равнозначно сигналу со скважностью 2.
На рисунке 2 это как раз та часть, где указана длительность импульса 50%, что равнозначно сигналу со скважностью 2.
Задающий генератор ШИМ на микросхеме UC3843
Его схема показана на рисунке 4.
Рисунок 4. Схема задающего генератора ШИМ на микросхеме UC3843
Микросхема UC3843 является управляющим ШИМ — контроллером для импульсных блоков питания и применяется, например, в компьютерных источниках формата ATX. В данном случае типовая схема ее включения несколько изменена в сторону упрощения. Для управления шириной выходного импульса на вход схемы подается регулирующее напряжение положительной полярности, то на выходе получается импульсный сигнал ШИМ.
В простейшем случае регулирующее напряжение можно подать с помощью переменного резистора сопротивлением 22…100КОм. При необходимости можно управляющее напряжение получать, например, с аналогового датчика освещенности, выполненного на фоторезисторе: чем темнее за окном, тем светлее в комнате.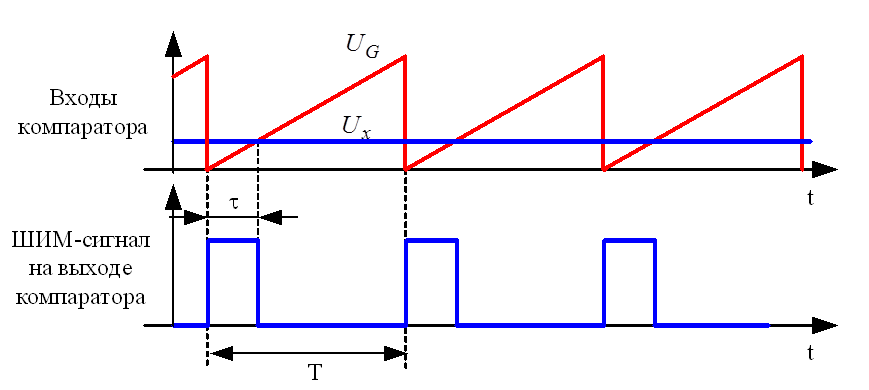
Регулирующее напряжение воздействует на выход ШИМ, таким образом, что при его снижении ширина выходного импульса увеличивается, что вовсе не удивительно. Ведь исходное назначение микросхемы UC3843 — стабилизация напряжения блока питания: если выходное напряжение падает, а вместе с ним и регулирующее напряжение, то надо принимать меры (увеличивать ширину выходного импульса) для некоторого повышения выходного напряжения.
Регулирующее напряжение в блоках питания вырабатывается, как правило, с помощью стабилитронов. Чаще всего это TL431 или им подобные.
При указанных на схеме номиналах деталей частота генератора около 1КГц, и в отличие от генератора на таймере 555, она при изменении скважности выходного сигнала не «плавает» — забота о постоянстве частоты импульсных блоков питания.
Чтобы регулировать значительную мощность, например, светодиодная лента, к выходу следует подключить ключевой каскад на транзисторе MOSFET, как было показано на рисунке 2.
Можно было бы и побольше рассказать о ШИМ – регуляторах, но пока остановимся на этом, а в следующей статье рассмотрим различные способы подключения светодиодов. Ведь не все способы одинаково хороши, есть такие, которых следует избегать, да и просто ошибок при подключении светодиодов случается предостаточно.
Ведь не все способы одинаково хороши, есть такие, которых следует избегать, да и просто ошибок при подключении светодиодов случается предостаточно.
По материалам electrik.info
WITA® Delta UP 70 PWM – WITA®
WITA
® Delta MAXI 80
1. апреля 2016
WITA
® Delta UP 70
1. июня 2016
€0,00
Благодаря использованию энергоэффективных насосов WITA® потребление энергии может быть уменьшено примерно на 80% по сравнению с обычным циркуляционным насосом.
В дополнение к восьми различным характеристикам, которые также могут быть выбраны с помощью Delta MIDI без модуля PWM, версия PWM имеет две ступени PWM. На этих этапах насос можно контролировать с помощью внешнего управления скоростьи. Если сигнал внешнего управления выходит из строя, есть возможность включить аварийный режим. В насосе имеется вращательное управление, которое в этом случае может использоваться для установки произвольной характеристической в диапазоне мощности насоса.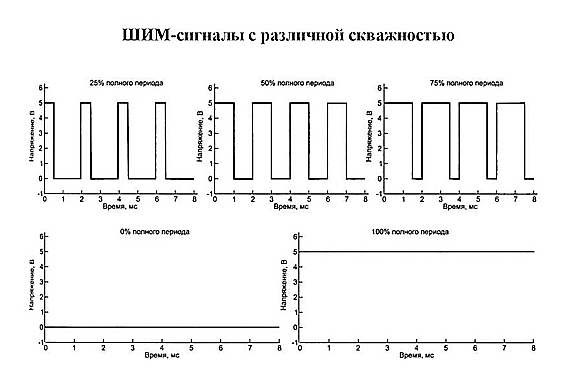 Чтобы узнать больше о функции PWM, вы можете загрузить руководство Delta MIDI в нашей документации. Там также подробно описывается сигнал управления PWM.
Чтобы узнать больше о функции PWM, вы можете загрузить руководство Delta MIDI в нашей документации. Там также подробно описывается сигнал управления PWM.
| Mаксимальный напор | 7,0 m |
| Максимальная подача | 3.900 l/h |
| Потребляемая мощность | 4 — 42 W |
| Регулирование | 4 характеристики постоянной скорости, 4 характеристики пропорционального давления, Функция отвода воздуха, Блокировка клавиатурыBнешняя регулируемая функция PWM для характеристики нагрева и солнечной энергии |
| Питание | 1 x 230V, 50 Hz |
| Защита двигателя | не требуется внешняя защита двигателя |
| Класс защиты | IP 42 |
| Температура окружающего воздуха | 0 °C до +40 °C |
| Температура жидкости | +5 °C до +110 °C |
| Температурный класc | TF 110 (CEN 335-2-51) |
| Максимальное давление в системе | 10 bar |
| Размер присоединений | DN 15, DN 20, DN 25, DN 32 |
| Монтажная длина | 110 mm, 130 mm, 180 mm |
| Материал корпуса | 130 mm, 180 mm Чугун, катафорезное покрытие; 110 mm, 130 mm, Латунь |
| Вес, включая изоляцию | 2,5 kg |
| Индекс энергоэффективности (EEI) | ≤ 0,15 |
| Дополнительное оборудование | Управление скорости с помощью сигнала управления PWM |
Похожие товары
WITA® Delta MAXI 80 PWM – WITA®
WITA
® Delta HE 35 LED
1. февраля 2016
февраля 2016
WITA
® Delta MAXI 80
1. апреля 2016
€0,00
Благодаря использованию энергоэффективных насосов WITA® потребление энергии может быть уменьшено примерно на 80% по сравнению с обычным циркуляционным насосом.
В дополнение к двенадцати различным характеристикам, которые также могут быть выбраны с помощью Delta MAXI без модуля PWM, версия PWM имеет двe ступени PWM. На этих этапах насос можно контролировать с помощью внешнего управления скоростьи. Если сигнал внешнего управления выходит из строя, есть возможность включить аварийный режим. В насосе имеется вращательное управление, которое в этом случае может использоваться для установки произвольной характеристической в диапазоне мощности насоса. Чтобы узнать больше о функции PWM, вы можете загрузить руководство Delta MAXI в нашей документации. Там также подробно описывается сигнал управления PWM.
| Mаксимальный напор | 8,0 m |
| Максимальная подача | 7.200 l/h |
| Потребляемая мощность | 9 — 78 W |
| Регулирование | 4 характеристики постоянной скорости, 4 характеристики пропорционального давления,4 xарактеристики постоянного давления, Минимальный рабочий уровен, Функция отвода воздуха, Блокировка клавиатуры, Защита от блокировки ротора Bнешняя регулируемая функция PWM для характеристики нагрева и солнечной энергии |
| Питание | 1 x 230V, 50 Hz |
| Защита двигателя | не требуется внешняя защита двигателя |
| Класс защиты | IP 42 |
| Температура окружающего воздуха | 0 °C до +40 °C |
| Температура жидкости | +5 °C до +110 °C |
| Температурный класc | TF 110 (CEN 335-2-51) |
| Максимальное давление в системе | 10 bar |
| Размер присоединений | DN 25, DN 32 |
| Монтажная длина | 180 mm |
| Материал корпуса | variant in grey cast iron, cataphoresis coated |
| Вес, включая изоляцию | 2,9 kg |
| Индекс энергоэффективности (EEI) | ≤ 0,20 |
| Дополнительное оборудование | Управление скорости с помощью сигнала управления PWM |
Похожие товары
Что такое PWM (ШИМ)? | dsp
Аббревиатурой PWM в английской документации обозначают ШИМ (широтно-импульсная модуляция). PWM (Pulse-Width Modulation) или PDM (Pulse-Duration Modulation) это метод уменьшения средней мощности электрического сигнала путем разделения его на дискретные части (отдельные порции). Среднее значение напряжения (и тока), поступающего в нагрузку, управляется открытием и закрытием электронного ключа на высокой частоте. Чем дольше время, когда ключ открыт в сравнении с временем, когда закрыт, тем больше мощность передается в нагрузку. Вместе с MPPT (maximum power point tracking), это один из основных методов уменьшения выхода энергии с солнечных панелей, чтобы не перегружать заряжаемые батареи [2]. PWM хорошо подходит для управления инерционными нагрузками, такими как моторы или нагреватели. Частота переключения PWM выбирается достаточно большой, чтобы не влиять на нагрузку, т. е. результирующая форма сигнала, воспринимаемая нагрузкой (и изменение мощности), должна получиться как можно более гладкой.
PWM (Pulse-Width Modulation) или PDM (Pulse-Duration Modulation) это метод уменьшения средней мощности электрического сигнала путем разделения его на дискретные части (отдельные порции). Среднее значение напряжения (и тока), поступающего в нагрузку, управляется открытием и закрытием электронного ключа на высокой частоте. Чем дольше время, когда ключ открыт в сравнении с временем, когда закрыт, тем больше мощность передается в нагрузку. Вместе с MPPT (maximum power point tracking), это один из основных методов уменьшения выхода энергии с солнечных панелей, чтобы не перегружать заряжаемые батареи [2]. PWM хорошо подходит для управления инерционными нагрузками, такими как моторы или нагреватели. Частота переключения PWM выбирается достаточно большой, чтобы не влиять на нагрузку, т. е. результирующая форма сигнала, воспринимаемая нагрузкой (и изменение мощности), должна получиться как можно более гладкой.
На рисунке ниже показан пример ШИМ на идеальной индуктивности, управляемый импульсами напряжения (синий сигнал), в результате чего получается похожий на синусоиду ток (показан красным). Форма синусоиды далека от идеальной, однако может быть значительно улучшена с повышением частоты импульсов. Обратите внимание, что форма тока это по сути интеграл от формы импульсов напряжения.
Форма синусоиды далека от идеальной, однако может быть значительно улучшена с повышением частоты импульсов. Обратите внимание, что форма тока это по сути интеграл от формы импульсов напряжения.
Скорость переключения (или частота) может значительно меняться в зависимости от нагрузки и от области применения. Например, в электрической печи можно включать и выключать нагревательный элемент несколько раз в минуту. Частота переключения 120 Гц можно использовать в диммере лампы. Для управления быстрым сервоприводом можно использовать частоты от нескольких килогерц (кГц) или десятков килогерц. В усилителях звука ит блоках питания компьютеров применяют частоты переключения от 44 кГц и выше. Основное достоинство регулирования по принципу PWM в том, что потери мощности на переключение в электронных ключах оказываются намного меньше, чем выходная мощность, передаваемая в нагрузку, и КПД системы регулирования получается очень высокой. PWM также хорошо работает в системах цифрового управления, потому соотношение включено/выключено (скважность периода импульсов) хорошо согласуется с числами, применяемые в цифровых системах.![]() PWM также используется в некоторых системах коммуникаций, где скважность сигнала используется для переноса информации по каналу связи.
PWM также используется в некоторых системах коммуникаций, где скважность сигнала используется для переноса информации по каналу связи.
Многие современные микроконтроллеры (MCU) содержат в себе встроенные аппаратные PWM-контроллеры, выходы которых могут быть соединены с внешними выводами корпуса MCU. Это широко используется для управления моторами постоянного тока в системах управления роботами и других приложениях. Кроме того, PWM может быть реализована программно, путем прямого управления логическим уровнем ножки порта MCU.
Скважность (duty cycle). Термин скважность обозначает пропорцию времени включения и общим периодом времени включено/выключено. Малое значение скважности соответствует малая выходная мощность, потому что на интервале цикла PWM интервал состояния выключено занимает больше времени, чем включено. Скважность часто выражают в процентах, где 100% означает максимальную выходную мощность, когда ключ постоянно замкнут. Когда у цифрового сигнала половина времени периода лог.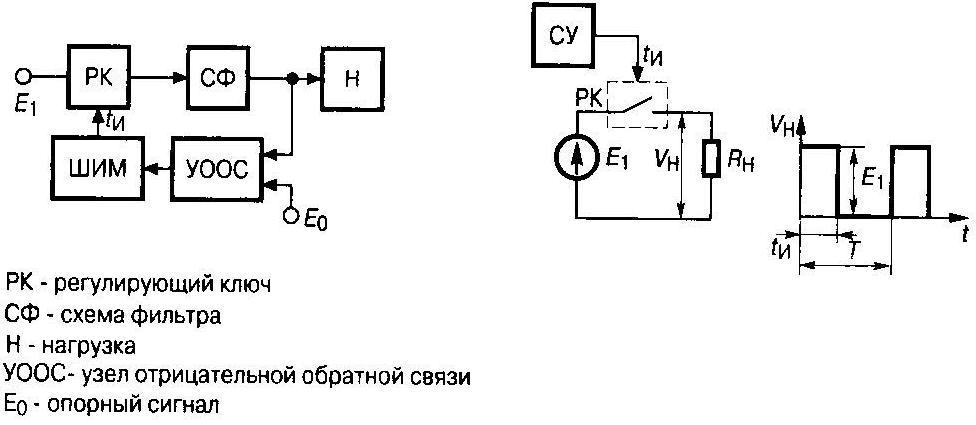 {T}y_{\text{min}}\,dt\right)\\&={\frac {1}{T}}\left(D\cdot T\cdot y_{\text{max}}+T\left(1-D\right)y_{\text{min}}\right)\\&=D\cdot y_{\text{max}}+\left(1-D\right)y_{\text{min}}\end{aligned}}}
{T}y_{\text{min}}\,dt\right)\\&={\frac {1}{T}}\left(D\cdot T\cdot y_{\text{max}}+T\left(1-D\right)y_{\text{min}}\right)\\&=D\cdot y_{\text{max}}+\left(1-D\right)y_{\text{min}}\end{aligned}}}
Это последнее выражение может быть справедливо упрощено во многих случаях, где ymin = 0, как {\displaystyle {\bar {y}}=D\cdot y_{\text{max}}} . Получается, что среднее значение сигнала напрямую зависит от скважности D.
Самый простой метод генерации ШИМ из аналоговой величины — использование компаратора для сравнения этой величины с пилообразным сигналом. На рис. 2 приведен пример преобразования аналогового синусоидального сигнала в сигнал ШИМ. Когда уровень синусоидального сигнала (показан на рисунке красным цветом) больше, чем уровень модулирующего сигнала пилы (показана синим цветом), сигнал ШИМ (показан розовым цветом) переходит в высокий уровень, иначе переходит в низкий уровень.
Рис. 2. Простой метод формирования ШИМ с помощью генератора пилы и компаратора.
Дельта-модуляция (delta-PWM, Δ-PWM). При использовании дельта-модуляции для управления ШИМ выходной сигнал проинтегрирован, и результат интегрирования сравнивается с пределами, которые соответствуют исходному сигналу, смещенному на константу [3]. Всякий раз, когда интеграл выходного сигнала достигает одного из пределов, сигнал ШИМ меняет свое состояние, см. рис. 3.
Выходной сигнал (показан синим) сравнивается с пределами (показаны зеленым). Эти пределы соответствуют исходному сигналу (показан красным), который модулируется, относительно него установлены верхний и нижний пределы, смещенные на заданную величину. Каждый раз, когда выходной сигнал (синий) достигает пределов, сигнал ШИМ меняет свое состояние.
Рис. 3. Принцип работы Δ-PWM.
Дельта-сигма модуляция (delta-sigma, ΔΣ-PWM). В дельта-сигма модуляции выходной сигнал вычитается из исходного сигнала для формирования сигнала ошибки [4]. Эта ошибка интегрируется, и когда интеграл ошибки выходи за пределы, выходной сигнал ШИМ меняет свое состояние, см. рис. 4.
рис. 4.
Исходный сигнал (показан зеленым) вычитается из выходного сигнала ШИМ (показан синим внизу) для формирования сигнала ошибки (показан синим вверху). Эта ошибка интегрируется, и результат интегрирования (розовый сигнал посередине) сравнивается с пределами. Когда интеграл ошибки выходит за пределы, выходной сигнал ШИМ меняет свое состояние.
Рис. 4. Принцип работы ΔΣ-PWM.
Пространственно-векторная модуляция. Этот алгоритм ШИМ применяется для генерации многофазного переменного тока. Здесь исходный сигнал оцифровывается с заданной периодичностью. На каждой выборке сигнала выбирают ненулевые активные переключающие векторы, смежные с исходным вектором, и один или более нулевых переключающих векторов для соответствующей доли периода дискретизации, чтобы синтезировать исходный сигнал как среднее из используемых векторов [5].
Прямое управление крутящим моментом (direct torque control, DTC). DTC используется для управления моторами переменного тока [6]. Этот метод ШИМ тесно связан с дельта-модуляцией (см. выше). Крутящий момент мотора и магнитный поток оцениваются и управляются таким образом, чтобы они оставались в заданных пределах гистерезиса, путем включения новой комбинации полупроводниковых ключей каждый раз, когда любой сигнал пытается отклониться от своего допустимого уровня.
Этот метод ШИМ тесно связан с дельта-модуляцией (см. выше). Крутящий момент мотора и магнитный поток оцениваются и управляются таким образом, чтобы они оставались в заданных пределах гистерезиса, путем включения новой комбинации полупроводниковых ключей каждый раз, когда любой сигнал пытается отклониться от своего допустимого уровня.
ШИМ с распределением времени. Множество цифровых схем могут генерировать сигналы ШИМ (например, большинство микроконтроллеров имеют аппаратные блоки ШИМ, которые могут выводить сигнал ШИМ на свои выводы). Обычно в таких схемах используется счетчик, который инкрементируется в равные промежутки времени (такты для инкремента счетчика обычно вырабатываются из тактовой частоты микроконтроллера), и сбрасывается по окончании каждого периода ШИМ. Когда значение счетчика становится больше определенного значения, выход ШИМ меняет свое состояние с лог. 1 на лог. 0 (или с лог. 0 на лог. 1). По окончании периода ШИМ выход возвращается в исходное состояние — обратно в лог. 1 (или в лог. 0). Эта технику иногда называют ШИМ с распределением времени.
1 (или в лог. 0). Эта технику иногда называют ШИМ с распределением времени.
Повторяющиеся интервалы инкремента счетчика и его сброса составляют цифровую версию генерации пилообразного сигнала. Схема сравнения значения счетчика а заданной величиной становится цифровой версией аналогового компаратора. Скважность ШИМ в цифровой версии может меняться дискретными шагами, определяемыми разрядностью счетчика. Однако счетчик с большой разрядностью может обеспечить достаточно высокую точность ШИМ.
[Типы ШИМ и спектр]
Бывает 2 типа метода реализации периодического ШИМ:
1. Обычный ШИМ. Передний срез сигнала ШИМ может удерживаться в начале окна времени периода, а задний срез может модулироваться по длительности для изменения скважности.
2. Симметричный ШИМ. Середина импульса может быть фиксирована в окне времени периода, при этом оба перепада уровня ШИМ смещаются влево и вправо относительно этой середины для уменьшения и увеличения скважности. Такой метод дает более чистый спектр на выходе при синтезе аналоговых сигналов, однако он немного сложнее в реализации, и требует специальной аппаратуры (во многих микроконтроллерах симметричный ШИМ поддерживается).
Такой метод дает более чистый спектр на выходе при синтезе аналоговых сигналов, однако он немного сложнее в реализации, и требует специальной аппаратуры (во многих микроконтроллерах симметричный ШИМ поддерживается).
Спектр на выходе ШИМ методов 1 и 2 примерно одинаковый, и содержит постоянную составляющую, модулируемый сигнал и фазо-модулированные несущие на каждой гармонике частоты импульсов ШИМ. Амплитуды групп гармоник ограничиваются огибающей функции синуса, и простираются до бесконечности. Бесконечная полоса вызвана нелинейной работой модулятора ШИМ. Из-за этого цифровой ШИМ страдает от искажений наложения спектра (алиасинга), что значительно снижает применимость ШИМ в современных системах связи. Ограничением полосы пропускания ядра ШИМ эффектов алиасинга можно избежать.
Дельта-модуляция, в отличие от периодического ШИМ, является псевдослучайным процессом, который производит непрерывный спектр без различаемых гармоник.
[Теорема дискретизации ШИМ]
Процесс формирования сигнала с помощью ШИМ нелинейный, и обычно предполагается, что восстановление аналогового сигнала с помощью ФНЧ получается не идеальным. Теорема [7] ШИМ-дискретизации показывает, что ШИМ-преобразование может быть совершенным. Теорема утверждает, что «Любой сигнал полосы частот в пределах ± 0,637 может быть представлен формой сигнала широтно-импульсной модуляции (ШИМ) с единичной амплитудой. Число импульсов в форме сигнала равно числу выборок Найквиста, и ограничение пика не зависит от того, является ли форма сигнала двухуровневой или трехуровневой».
Теорема [7] ШИМ-дискретизации показывает, что ШИМ-преобразование может быть совершенным. Теорема утверждает, что «Любой сигнал полосы частот в пределах ± 0,637 может быть представлен формой сигнала широтно-импульсной модуляции (ШИМ) с единичной амплитудой. Число импульсов в форме сигнала равно числу выборок Найквиста, и ограничение пика не зависит от того, является ли форма сигнала двухуровневой или трехуровневой».
Теорема дисретизации Найквиста-Шеннона гласит [8]: «Если есть сигнал, ограниченный по спектру частотой f0, то можно собрать и сохранить всю информацию в этом сигнале, если оцифровать его с частотой дискретизации больше 2f0».
[Ссылки]
1. Pulse-width modulation site:wikipedia.org.
2. What is Maximum Power Point Tracking (MPPT) site:solar-electric.com.
3. Delta modulation site:wikipedia.org.
4. Дельта-сигма модуляция.
5. Space vector modulation site:wikipedia. org.
org.
6. Direct torque control site:wikipedia.org.
7. «The sampling theorem with constant amplitude variable width pulses» J. Huang, K. Padmanabhan, and O. M. Collins.
8. Sampling: What Nyquist Didn’t Say, and What to Do About It site:wescottdesign.com.
9. XPS Delta-Sigma ЦАП.
PWM — ШИМ — широтно-импульсная модуляция. Как работает и где применяется?
PWM (Pulse-width modulation, широтно-импульсная модуляция) – способ подачи питания устройству с определёнными временными рамками, такими как пауза между сигналом и время подачи сигнала.
Применяется во всех сферах, но в компьютерной сфере наиболее востребована в электромоторах вентиляторов и помп, подсветке мониторов.
В электромоторах есть сила инерции, которая позволяет крутиться валу ещё какое-то время после отключения питания. Если подавать энергию с промежутками (сигнал-пауза-сигнал), можно замедлять скорость вращения вала в зависимости от длины паузы между сигналами и времени подачи сигнала.
Если подавать энергию с промежутками (сигнал-пауза-сигнал), можно замедлять скорость вращения вала в зависимости от длины паузы между сигналами и времени подачи сигнала.
Широтно-импульсная модуляция позволяет плавно регулировать скорость вращения вала двигателя, при наличии датчика скорости вращения.
В вентиляторах компьютерных систем используются привязки к заданным значениям температуры, увеличивая скорость с её ростом. Возможно регулирование большинства вентиляторов с 3-pin и 4-pin разъёмами, но 4-х пиновый коннектор, позволяет регулировать обороты намного плавнее, за счёт отдельного проводка управления ШИМ. В 3-х пиновом вентиляторе, регуляция оборотов происходит непосредственно подаваемым напряжением.
Не рекомендуется регулировать обороты вентиляторов на гидродинамических подшипниках и некоторых подшипниках скольжения. Такие вентиляторы рассчитаны либо на постоянную работу при определённых оборотах, либо у них есть нижний порог, после которого они начнут быстро изнашиваться.
Такие вентиляторы рассчитаны либо на постоянную работу при определённых оборотах, либо у них есть нижний порог, после которого они начнут быстро изнашиваться.
В подсветке для мониторов, ШИМ схема тем качественнее, чем выше её частота работы. Применяется для регулирования яркости, посредством пауз в подаче питания на лампы или светодиоды. Светодиодная подсветка намного больше зависима от частоты ШИМ, так как время для полного затухания светодиода в разы меньше чем у ламп холодного катода (CCFL). Поэтому мерцания при понижении яркости панели, могут сильно раздражать глаза и быть очень даже различимыми для глаза.
Руководство покупателя — нужен ли мне контроллер заряда солнечной энергии с ШИМ или MPPT?
Зачем нужен контроллер солнечного заряда?
Контроллер заряда солнечной батареи (часто называемый регулятором) похож на обычное зарядное устройство, т. е. он регулирует ток, протекающий от солнечной панели в батарею, чтобы избежать перезарядки батарей. (Если вам не нужно понимать причины, прокрутите до конца простую блок-схему). Как и в обычном качественном зарядном устройстве, используются различные типы аккумуляторов, можно выбрать напряжение поглощения, напряжение холостого хода, а иногда также можно выбрать периоды времени и / или остаточный ток.Они особенно подходят для литий-железо-фосфатных батарей, поскольку после полной зарядки контроллер остается на установленном плавающем или удерживающем напряжении около 13,6 В (3,4 В на элемент) в течение оставшейся части дня.
е. он регулирует ток, протекающий от солнечной панели в батарею, чтобы избежать перезарядки батарей. (Если вам не нужно понимать причины, прокрутите до конца простую блок-схему). Как и в обычном качественном зарядном устройстве, используются различные типы аккумуляторов, можно выбрать напряжение поглощения, напряжение холостого хода, а иногда также можно выбрать периоды времени и / или остаточный ток.Они особенно подходят для литий-железо-фосфатных батарей, поскольку после полной зарядки контроллер остается на установленном плавающем или удерживающем напряжении около 13,6 В (3,4 В на элемент) в течение оставшейся части дня.
Наиболее распространенный профиль заряда — это та же базовая последовательность, что и на качественном сетевом зарядном устройстве, то есть объемный режим> режим абсорбции> плавающий режим. Вход в режим оптовой заправки происходит по адресу:
- восход утром
- , если напряжение батареи падает ниже заданного значения в течение более заданного периода времени, e.
 г. 5 секунд (повторный вход)
г. 5 секунд (повторный вход)
 г. 5 секунд (повторный вход)
г. 5 секунд (повторный вход)Этот повторный вход в объемный режим хорошо работает со свинцово-кислотными аккумуляторами, поскольку падение и падение напряжения хуже, чем для литиевых аккумуляторов, которые поддерживают более высокое и стабильное напряжение на протяжении большей части цикла разряда.
Литиевые батареи
Литиевые батареи
(LiFePO4) не получают выгоды от повторного входа в режим большой емкости в течение дня, так как внутреннее сопротивление литиевых батарей увеличивается при высоком (и низком) состоянии заряда, как показано оранжевыми вертикальными линиями на диаграмме ниже и необходимо только время от времени балансировать ячейки, что может быть сделано только вокруг напряжения поглощения.Связанная с этим причина состоит в том, чтобы избежать быстрого и большого изменения напряжения, которое будет происходить в этих регионах при включении и выключении больших нагрузок.
Литиевые батареи
не имеют определенного «напряжения холостого хода», и поэтому «напряжение холостого хода» контроллера должно быть установлено равным или чуть ниже «напряжения колена заряда» (как указано в таблице ниже) заряда LiFePO4.![]() профиль, т.е. 3,4 В на элемент или 13,6 В для аккумулятора 12 В. Контроллер должен удерживать это напряжение в течение оставшейся части дня после полной зарядки аккумулятора.
профиль, т.е. 3,4 В на элемент или 13,6 В для аккумулятора 12 В. Контроллер должен удерживать это напряжение в течение оставшейся части дня после полной зарядки аккумулятора.
Разница между контроллерами заряда солнечных батарей PWM и MPPT
Суть различия:
- С ШИМ-контроллером ток выводится из панели чуть выше напряжения батареи, тогда как
- С
]]> Контроллер заряда солнечной батареи MPPT ток выводится из панели на панели «максимальное напряжение питания» (подумайте о контроллере MPPT как о «интеллектуальном преобразователе постоянного тока в постоянный»)
Вы часто видите лозунги типа «вы получите 20% или более энергии, собираемой контроллером MPPT».Этот дополнительный компонент на самом деле значительно различается, и ниже приводится сравнение, предполагая, что панель находится на полном солнце, а контроллер находится в режиме объемной зарядки. Игнорирование падений напряжения и использование простой панели и простой математики в качестве примера:
Максимальный ток питания панели (Имп. ) = 5,0 А
) = 5,0 А
Максимальное напряжение питания панели (Vmp) = 18 В
Напряжение аккумулятора = 13 В (напряжение аккумулятора может варьироваться от 10,8 В до 14,4 В в режиме абсорбционной зарядки).При 13 В усилитель панели будет немного выше, чем максимальный усилитель мощности, скажем, 5,2 А
.
С ШИМ-контроллером потребляемая мощность панели составляет 5,2 А * 13 В = 67,6 Вт. Это количество энергии будет потребляться независимо от температуры панели, при условии, что напряжение панели остается выше напряжения батареи.
С контроллером MPPT мощность панели составляет 5,0 А * 18 В = 90 Вт, т.е. на 25% больше. Однако это слишком оптимистично, поскольку напряжение падает с ростом температуры; таким образом, если предположить, что температура панели повышается, скажем, на 30 ° C выше температуры стандартных условий испытаний (STC), составляющей 25 ° C, и напряжение падает на 4% на каждые 10 ° C, т.е.е. всего 12%, тогда мощность, потребляемая MPPT, будет 5 А * 15,84 В = 79,2 Вт, то есть на 17,2% больше мощности, чем у ШИМ-контроллера.
Таким образом, наблюдается увеличение сбора энергии с помощью контроллеров MPPT, но процентное увеличение сбора значительно варьируется в течение дня.
Различия в работе ШИМ и MPPT:
ШИМ:
Контроллер ШИМ (широтно-импульсной модуляции) можно рассматривать как (электронный) переключатель между солнечными панелями и батареей:
- Переключатель находится в положении ВКЛ, когда режим зарядки находится в режиме объемной зарядки
- Переключатель «щелкает» ВКЛ и ВЫКЛ по мере необходимости (широтно-импульсная модуляция), чтобы поддерживать напряжение батареи на уровне напряжения поглощения.
- Переключатель выключен в конце абсорбции, в то время как напряжение аккумуляторной батареи падает до плавающего.
- Переключатель снова включается и выключается по мере необходимости (широтно-импульсная модуляция), чтобы поддерживать напряжение батареи на уровне плавающего напряжения.
Обратите внимание, что когда переключатель находится в положении ВЫКЛ, напряжение на панели будет равным напряжению холостого хода (Voc), а когда переключатель находится в положении ВКЛ, напряжение на панели будет равно напряжению батареи + падение напряжения между панелью и контроллером.
Лучшая панель для ШИМ-контроллера:
Лучшая панель для ШИМ-контроллера — это панель с напряжением, которое чуть выше, чем требуется для зарядки аккумулятора, и с учетом температуры, как правило, панель с Vmp (максимальное напряжение питания) около 18 В для зарядки аккумулятора. Аккумулятор 12 В. Их часто называют панелями на 12 В, хотя их напряжение составляет около 18 В.
MPPT:
Контроллер MPPT можно рассматривать как «интеллектуальный преобразователь постоянного тока в постоянный», т.е.е. он понижает напряжение панели (следовательно, можно использовать «домашние панели») до напряжения, необходимого для зарядки аккумулятора. Ток увеличивается в той же пропорции, что и падение напряжения (без учета потерь на нагрев в электронике), как в обычном понижающем преобразователе постоянного тока в постоянный.
«Умный» элемент в преобразователе постоянного тока в постоянный — это мониторинг точки максимальной мощности панели, которая будет меняться в течение дня в зависимости от силы света и угла наклона, температуры панели, затенения и состояния панели (ей). Затем «умники» регулируют входное напряжение преобразователя постоянного тока в постоянный — на «инженерном языке» он обеспечивает согласованную нагрузку на панель.
Затем «умники» регулируют входное напряжение преобразователя постоянного тока в постоянный — на «инженерном языке» он обеспечивает согласованную нагрузку на панель.
Лучшая панель для контроллера MPPT:
Для согласования панели с контроллером MPPT рекомендуется проверить следующее:
- Напряжение холостого хода панели (Voc) должно быть ниже допустимого напряжения.
- VOC должен быть выше «пускового напряжения», чтобы контроллер «включился».
- Максимальный ток короткого замыкания панели (Isc) должен находиться в пределах указанного диапазона
- Максимальная мощность массива — некоторые контроллеры допускают «завышение размера», например.g Redarc Manager 30 может иметь подключенную мощность до 520 Вт
Выбор подходящего солнечного контроллера / регулятора
ШИМ — хороший недорогой вариант:
• для небольших систем
• где эффективность системы не критична, например, капельная зарядка.
• для солнечных панелей с максимальным напряжением питания (Vmp) до 18 В для зарядки аккумулятора 12 В (36 В для аккумулятора 24 В и т. Д.).
Контроллер MPPT лучший:
• Для более крупных систем, где целесообразно использование дополнительных 20% * или более энергии
• Когда напряжение солнечной батареи существенно выше, чем напряжение батареи e.г. с помощью домашних панелей, для зарядки аккумуляторов 12В
* Контроллер MPPT даст более высокую отдачу по сравнению с контроллером PWM при увеличении напряжения панели. Т.е. панель eArche мощностью 160 Вт, использующая 36 обычных монокристаллических ячеек с максимальной мощностью 8,4 А, будет обеспечивать около 8,6 А при 12 В; в то время как панель 180 Вт, имеющая еще 4 ячейки, будет обеспечивать такую же силу тока, но 4 дополнительных ячейки увеличивают напряжение панели на 2 В. Контроллер PWM не будет собирать дополнительную энергию, но контроллер MPPT будет собирать дополнительные 11. 1% (4/36) от панели 180 Вт.
1% (4/36) от панели 180 Вт.
По тому же принципу для всех панелей, использующих элементы SunPower с более чем 32 ячейками, требуется контроллер заряда MPPT, в противном случае контроллер PWM будет собирать ту же энергию от панелей с 36, 40, 44 ячейками, что и с панели с 32 ячейками.
Характеристики и опции солнечного контроллера заряда
Контроллеры
Victron SmartSolar имеют встроенный Bluetooth для удаленного мониторинга MPPT путем сопряжения его со смартфоном или другим устройством через приложение Victron.
Контроллеры Boost MPPT
Контроллеры заряда
Genasun «Boost» MPPT позволяют заряжать аккумуляторы, которые имеют более высокое напряжение, чем панель.
Комбинированное зарядное устройство MPPT и DC-DC
Функция MPPT является естественным дополнением к функции зарядного устройства DC-DC, и есть несколько качественных брендов, которые предоставляют ее в стадии разработки.
Один блок можно использовать отдельно, так как он автоматически переключается между зарядкой генератора и зарядкой от солнечной энергии.Для более крупных систем мы предпочитаем использовать отдельный контроллер MPPT для фиксированных панелей на крыше и использовать комбинированный контроллер MPPT / DC-DC с переносными панелями. В этом случае разъем Андерсона размещается снаружи дома на колесах, который затем подключается к солнечному входу блока MPPT / DC-DC.
Обратите внимание, что емкость аккумулятора должна быть достаточной, чтобы суммарный зарядный ток от одновременной зарядки от генератора переменного тока и солнечных панелей на крыше не превышал рекомендованный производителем максимальный зарядный ток.
Варианты дешевле
Дешевые контроллеры могут быть помечены как MPPT, но тестирование показало, что некоторые из них на самом деле являются контроллерами PWM.
Дешевые контроллеры могут не иметь защиты аккумулятора от перенапряжения, что может привести к перезарядке аккумулятора и потенциальному повреждению аккумулятора, поэтому покупатель должен быть осторожен.
Несколько солнечных зарядных устройств
При правильном подключении можно добавить несколько солнечных зарядных устройств (любая комбинация типа и мощности) для зарядки аккумулятора.Правильная разводка означает, что каждое солнечное зарядное устройство в идеале подключается отдельно и непосредственно к клеммам аккумулятора. Этот идеальный случай означает, что каждый контроллер «видит» напряжение батареи и на него не влияет ток, исходящий от других контроллеров заряда. Контроллеры, очевидно, не будут иметь идентичных характеристик зарядки и могут иметь разные настройки, и они будут заряжаться в соответствии со своими запрограммированными характеристиками. Эта ситуация ничем не отличается от зарядки аккумулятора от сети / генератора одновременно с зарядкой от солнечной батареи.В современных контроллерах ток не будет течь обратно от батареи к контроллеру (за исключением очень небольшого тока покоя).
Простая блок-схема
Мне нужен контроллер солнечного заряда
Vmp солнечной панели больше:
— 19 В для батареи 12 В
— 34 В для батареи 24 В
— 49 В для батареи 36 В
— 64 В для батареи 48 В
Vmp солнечной панели находится в пределах:
— 17-19 В для батареи 12 В
— 30-34 В для батареи 24 В
— 43-49 В для батареи 36 В
— 56-64 В для батареи 48 В
Vmp солнечной панели меньше:
— 13 В для батареи 12 В
— 26 В для батареи 24 В
— 41 В для батареи 36 В
— 43 В для батареи 48 В
Применение
в модулях регулирования напряжения
0
T «J
TI1
3TiS
Trl
ITa
1TM
ITm
Рис.
verter
На рис.
2
показана диаграмма приложения позиционного контроллера pro
.Обоснование использования подхода с выходом между
в
в этой заявке
, как следует из
. Так как
конструкция требует максимальных токов в диапазоне
30-60 ампер, существует необходимость в
и
параллельном использовании нескольких силовых переключателей, каждый рассчитан на
и
гидроразрыва. —
от общего тока
. Таким образом, учитывая, что будет использоваться несколько переключателей
, работая с ними в квадрате
, мы достигаем дополнительного преимущества уменьшения пульсаций.Если
n
фаз используются в понижающем преобразователе
, самая низкая частота
, наблюдаемая на входе и выходе, будет n-й гармоникой
частоты коммутации. Таким образом,
, если пульсации напряжения
остаются постоянными, входная и выходная
входные емкости могут быть уменьшены на
a
коэффициент
из
n.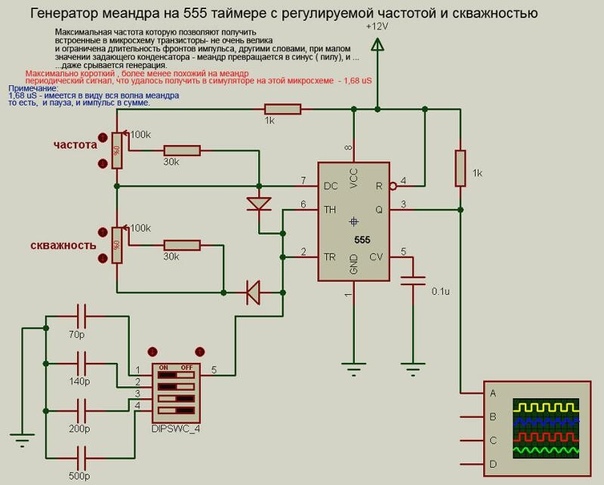
—
сохранить инвариант дробного пульсирующего тока относительно
—
в эталонной однофазной схеме
, на самом деле
потребуется увеличить
на каждые
индуктивностей фаз на
н.
Однако это может не быть
ограничением
и может быть нежелательным
. Фактически, для сохранения неизменности выходного пульсационного напряжения
с возрастом можно выбрать
, использовать
n
индукторов, по
каждая с индуктивностью, равной
в
одиночной
опорной фазе. схема. При таком выборе увеличивается дробный пульсирующий ток
, но уменьшается общая параллельная проводимость
вместе с магнитной энергией
.Это уменьшение позволяет намного быстрее устранить несоответствие между
и
и несоответствие сопротивления CDC силовой передачи.
Несоответствие рабочего цикла может быть уменьшено
до
незначительный уровень
els
с цифровым управлением
.
На
, с другой стороны, несоответствие сопротивления постоянного тока
цепи
не может быть устранено.
Стратегия здесь состоит в том, чтобы принять распределение постоянного тока
, наложенное сопротивлением постоянному току
из
различных ветвей
из
силовой передачи.Получается, что в результате рассеиваемая мощность
фактически сведена к минимуму. В частности,
ветвь силовой передачи
с более низким сопротивлением постоянному току
принимает самый большой постоянный ток. и
, так что
и далее. Положительный температурный коэффициент
устройств
SIOSFET
и металлических проводников
защищает от возможности утечки теплового тока
.
2,4
Функция цифрового контроллера
Рисунок
3
показывает
блок-схему
прототип цифрового контроллера
.![]() Комбинированная пропорционально-производная
Комбинированная пропорционально-производная
(PD)
и закон управления с прямой связью
составляет
, так как
следует:
(1)
, где T — период цикла переключения,
К
и
K
— параметры усиления,
Df
—
— коэффициент прямой связи
цикл,
De
—
напряжение ошибки, масштабированное на
В ,,,
и
— это заданный рабочий цикл.Сигнал
D,
генерируется путем подключения входного вывода высокого уровня аналогово-цифрового преобразователя (АЦП)
к
& ,,
и вывода низкого уровня
на землю. Вывод аналогового входа подключается к
V..t,
желаемому опорному выходному напряжению. Таким образом,
Df
приблизительно равно
K, t / V ,,
, что соответствует рабочему циклу с упреждающей передачей
.Второй АЦП также
имеет
В,
и землю
как
входа высокий и
низкий
контактов, hut
имеет
В, t
как
аналоговый вход. Выход этого АЦП
Выход этого АЦП
,
Dout,
— это выходное напряжение, масштабированное на
Qn.
Us-
ing
Df
и
Doutz
ошибка
в рабочем цикле,
De,
рассчитывается
.Член производной (конечной разности) равен
, вычисляемому с использованием значения
D,
из предыдущего цикла
или
. Таким образом, объединение этих членов с некоторыми параметрами усиления
дает управление частичным разрядом с опорой на канал связи
. Обратите внимание, что две функции АЦП здесь могут быть мультиплексированы
с одним аппаратным АЦП.
Время работы
, так как
следует: АЦП
— реакция на скачкообразные изменения нагрузки при условии подачи сигнала отмены
~ ~~ ~~
, так что
, что
все фазы:
ac-
производят выборку выходного и опорного напряжения один раз на каждые
при переходных условиях большой нагрузки.
Посредством цикла переключения PD (пропорциональная производная)
с использованием топологии с чередованием количество выходного блока вычисляет желаемый рабочий цикл для следующей
необходимой емкости, уменьшается до
— точка
, где только цикл, и защелки
,
,
,
, используются
,
, для обеспечения рабочего цикла.
Многослойных керамических конденсаторов
может хватить
.
cle на D-PWM (Digital to
PW)
блоков с
Одной из ключевых проблем, которую следует учитывать, является текущая соответствующая задержка для обеспечения квадратурной работы.
инж.
На
существуют по крайней мере два подхода
до
решить проблему
lem. Один из них заключается в активном обеспечении равного распределения тока
общей
нагрузки
между
различных фаз
преобразователя
. Это может быть достигнуто путем текущего измерения и / или оценки
датчиков
с последующей корректировкой рабочего цикла
различных фаз на отдельной базе
sis для исправления любого несоответствия.
Второй подход
,
, которому мы здесь следуем, основывается на
на пассивном распределении тока
,
также известен как
как
«метод спада». При пассивном распределении ренты
генерируются несоответствия при рабочем цикле
2,5
Цифровые
–
ШИМ
Блок
Дизайн
Энергопотребление
играет важную роль в дизайне
. цифрового контроллера из-за наличия
из
высокой частоты
.
В нашем дизайне
,
мы планируем
на
с использованием
8,9,
или
IO-битовой модуляции. Частота переключения
—
—
—
—
e
из
300 кГц,
и, таким образом,
частота переключения, в зависимости от
на
число совпадений
быстро clock
необходимо
to he
2
B
,
2 ‘,
или
2′ ‘
раза больше
78
Управление двигателями постоянного тока с щеткой 900 с использованием PWM 9000
Многие приложения, в которых используются щеточные миниатюрные электродвигатели постоянного тока Portescap, требуют приводов электродвигателей с более чем
одна точка нагрузки или через определенные циклы нагрузки. Для запуска двигателя в пригодных для использования точках нагрузки требуется переменная,
Для запуска двигателя в пригодных для использования точках нагрузки требуется переменная,
управляемый источник питания, который может быть обеспечен за счет источников питания с непрерывным линейным регулированием или
через широтно-импульсную модуляцию (ШИМ). Линейное регулирование обычно неэффективно, и требования повышаются.
жилое пространство. Более того, в приложениях с батарейным питанием становится непрактичным использовать линейное регулирование при
различные точки нагрузки. ШИМ-регулирование напряжения, с другой стороны, эффективно и может эффективно использоваться с
аккумуляторные батареи или приложения с питанием от постоянного тока.Повышенная эффективность привода PWM увеличивает срок службы батареи и
уменьшает нагрев электронных компонентов.
Одним из компромиссов использования ШИМ с двигателем является появление потерь на вихревые токи в обмотках ротора из-за
непрерывное ШИМ-переключение, которого, как правило, нет в случае линейного источника питания. Тем не мение,
при правильной конструкции ШИМ эффекты вихревых токов могут быть сведены к минимуму, что позволяет оптимизировать работу двигателей.
ведомый.
Щеточные двигатели постоянного тока
Portescap обладают очень низким моментом инерции и низкой индуктивностью.Это позволяет использовать двигатель в
приложение, где желательны динамическое поведение и быстрые ответы. В
использование ШИМ позволяет контролировать ток в обмотках. Следовательно, на выходе
крутящий момент, который линейно пропорционален среднему току обмотки, может
правильно контролироваться; благодаря нашему дизайну без сердечника.
В отличие от чисто резистивной нагрузки, для двигателя постоянного тока сопротивление, индуктивность и обратная ЭДС на обмотках ротора являются решающими факторами для оптимизации частоты ШИМ и рабочего цикла.
Сравнение линейного и ШИМ-источника питания
ЛИНЕЙНЫЙ ИСТОЧНИК ПОСТОЯННОГО ТОКА
Рис.1 показана эквивалентная схема двигателя, работающего от линейного источника постоянного тока. Здесь ток является функцией
только сопротивление обмотки. Индуктивность не влияет на ток, так как при постоянном источнике сопротивление
индуктора равен нулю.
Значения по каталогу
Portescap и результаты ресурсных испытаний получены с постоянным линейным источником питания постоянного тока.
ИСТОЧНИК ШИМ
В дополнение к омическому сопротивлению обмотка двигателя постоянного тока обеспечивает индуктивность цепи ШИМ. Кроме того,
обратная ЭДС, эквивалентная характеристикам двигателя (KE) и скорости, генерируется через терминал.Этот
усложняет конструкцию схемы ШИМ, так как не только рабочий цикл, но и частота ШИМ должны быть
точно контролируется для оптимальной работы двигателя.
Когда двигатель находится в состоянии покоя или вращается с очень низкой скоростью, обратной ЭДС можно пренебречь и упростить
показана эквивалентная схема двигателя (рис. 2).
Диод свободного хода или демпфирующий диод, показанный на рис. 2, никогда не должен быть исключен при использовании переменного напряжения, такого как
как в случае с ШИМ, управляющим двигателями. Наличие диода свободного хода позволяет рассеивать заряд.![]()
без дуги во время переключения.
Когда двигатель работает на умеренно высокой скорости, обратная ЭДС сравнима с приложенным напряжением, поэтому
компонент, представляющий обратную ЭДС, необходимо добавить в эквивалентную схему. Модифицированный эквивалент
Схема показана на рис. 3.
Наличие обратной ЭДС наряду с цепью RL в щеточном двигателе постоянного тока вносит нелинейность в ШИМ.
управления, и частота ШИМ и рабочий цикл ШИМ становятся важными для оптимальной выходной мощности.
При использовании ШИМ для управления двигателем, когда ЭМС (электромагнитная совместимость) критична, рекомендуется
для анализа радиационных эффектов, поскольку излучаемая электромагнитная энергия обычно выше с ШИМ, когда
по сравнению с линейными источниками постоянного тока.
Вольт-амперные характеристики
Когда напряжение подается на цепь RL, индуктор противодействует току в цепи. Как результат,
ток экспоненциально возрастает до установившегося значения в зависимости от отношения L / R двигателя. Рис. 4 показывает
Рис. 4 показывает
схематическое повышение тока через обмотку. Когда приложенное напряжение снимается с цепи,
ток медленно достигает нуля, экспоненциально затухая.
Константа L / R, известная как постоянная времени для цепи RL, определяет максимальную скорость изменения
приложенное напряжение в цепи.Установившееся состояние после любого изменения приложенного напряжения достигается через некоторое время.
равный нескольким постоянным времени. Кривая ниже показывает экспоненциальный рост тока в двигателе и
представляет собой идеальный сценарий. Пятикратная постоянная времени обычно считается количеством необходимого времени.
для достижения устойчивого состояния. Однако, как показано ниже, при пятикратной постоянной времени мы находимся примерно на 99,33% от
максимальный ток. Следовательно, выбор нескольких постоянных времени остается за дизайнером.
Для простоты игнорируя наличие обратной ЭДС, нарастание тока в простой цепи RL можно представить как
‘I0
’- максимальный ток через цепь RL для заданного напряжения. ‘Τ’ — постоянная времени цепи RL.
‘Τ’ — постоянная времени цепи RL.
определяется как время, необходимое току для достижения (1 / e ≈ 63,21%) максимального тока. И «t» время.
По достижении установившегося состояния, если питание отключено, ток через цепь RL уменьшается.
экспоненциально, как показано на рис. 5.
Рекомендации по проектированию ШИМ
При использовании ШИМ-привода с щеточными двигателями постоянного тока внутренняя индуктивность ротора действует как фильтр тока.
и выгоден для схемы управления.Однако другие конструктивные параметры, такие как частота ШИМ и длительность
цикла, влияют на текущую пульсацию и, следовательно, на срок службы щеточной коммутации.
ОПТИМАЛЬНАЯ ЧАСТОТА
При использовании ШИМ для управления двигателем ток через двигатель повышается и понижается с каждым периодом
ШИМ. Если не брать в расчет обратную ЭДС двигателя, нарастание тока зависит от индуктивности двигателя и общей
сопротивление. Для каждого цикла ШИМ, чтобы ток достиг своего установившегося значения, частота ШИМ
следует выбирать таким образом, чтобы оставалось достаточно времени для цепи RL, обычно более 5τ.
Когда частота ШИМ превышает пороговое значение, время включения и выключения ШИМ становится меньше
время, необходимое для работы цепи RL, и ток, необходимый для достижения устойчивого состояния. Следовательно, текущий
колеблется между двумя значениями нестационарного состояния, что приводит к
текущая пульсация. На рис.6 показаны условия, когда частота ШИМ равна
достаточно для достижения устойчивого состояния. На рис.7 показано условие
когда частота ШИМ выше, чем время, необходимое для устойчивой
состояние, и ток через двигатель колеблется.Из дизайна
В перспективе пульсация тока должна быть уменьшена за счет оптимизации частоты возбуждения так, чтобы почти линейная
крутящий момент может быть достигнут.
Также рекомендуется поддерживать частоту ШИМ выше, чем слышимый человеком диапазон (20 Гц — 20 кГц) в качестве
пульсации тока в этом частотном диапазоне могут создавать шум во время работы двигателя.
ТЕКУЩАЯ ПУБИНА
Для двигателей Portescap без сердечника рекомендуется сохранять пульсации тока на минимально возможном уровне. Обычно пульсация
Обычно пульсация
<10% считается низким значением.Более высокая пульсация повлияет на производительность:
I. Выходной крутящий момент двигателя пропорционален току, в то время как омический (резистивный) нагрев обмотки
пропорциональна квадрату тока. Следовательно, при пиковых токах нагрев пакета обмоток
будет преобладать и уменьшать двигательную активность и жизнь.
II. В щеточных двигателях постоянного тока Portescap не используется металлическая пластина, поэтому потери на вихревые токи и гистерезисы
в магнитной цепи прямо пропорциональны пульсации тока и уменьшат общую
производительность мотора.
III. При замене драгоценных металлов повышенная электроэрозия повлияет на срок службы двигателя, поскольку
электроэрозия пропорциональна коэффициенту L.Ieff
2
. Где L — индуктивность, а Ieff — эффективная
ток через обмотку.
IV. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или
Пленка представляет собой слой оксида меди, образованный на поверхности коммутатора угольной щетки, который полезен
в улучшении коммутации и уменьшении трения. ) Следовательно, на более низких скоростях контакт щетки
) Следовательно, на более низких скоростях контакт щетки
испортится. На средних и высоких скоростях патин не повлияет на работу мотора.
существенно.
Индуктивное напряжение на клемме можно представить как
.
Где L — индуктивность, U L — напряжение, генерируемое на катушке индуктивности, а T — бесконечно малое время.
в пределах которого сила тока изменилась на ∆I.
Для работы двигателя в режиме ШИМ напряжение на его клеммах противодействует генерируемой обратной ЭДС.
через клемму двигателя.Следовательно, ур. (3) можно переписать как для нарастания тока, так и для спада тока в ШИМ
операции как:
Где нижний индекс ON обозначает время «включения», а OFF означает время «выключения» импульса PWM, так что
общее время TP равно
Где, D — рабочий цикл сигнала ШИМ.
Следовательно, ур. (8) можно переписать как
Ур. (11) может использоваться для извлечения пульсаций тока в двигателе из-за сигнала ШИМ рабочего цикла «D» и
частота «1 / T P ».
Особенно интересно отметить из ур. (11) что пульсация тока максимальна при рабочем цикле 50%.
Следовательно, разработчикам ШИМ предлагается запускать двигатель вдали от зоны рабочего цикла 50%.
Кроме того, из приведенного выше уравнения пульсации тока зависят только от индуктивности двигателя, а не от
электрическая постоянная времени двигателя.
В идеале для двигателей Portescap без сердечника разница (U ON — U OFF ), иногда выражаемая как ∆U, должна быть сохранена как
как можно ниже в зависимости от максимального входного напряжения двигателя и скорости приложения.Индуктивность двигателя на его клеммах является функцией ШИМ.
частота. В каталоге продукции Portescap указана индуктивность двигателя на уровне 1
кГц. Например, на частоте 100 кГц индуктивность может снизиться до 20%.
каталожной стоимости.
По сравнению с двигателями с железным сердечником индуктивность двигателей Portescap
ниже в два раза. Кроме того, коэффициент качества ниже, поскольку в роторе нет металлических пластин.
обмотки. Следовательно, привод PWM с двигателем Portescap будет иметь относительно более высокие потери и будет предлагать меньше
электронная стабильность.
СРОК СЛУЖБЫ ДВИГАТЕЛЯ
В щеточных двигателях постоянного тока преобладающим видом отказа является щеточная коммутация. При жизни
электродвигателя, щетки из угольного графита или драгоценного металла подпружинены и механически соединены с
сегменты коллектора для зарядки катушек. Следовательно, износ щетки является функцией механического трения, когда
щетки скользят по сегментам коллектора и вызывают электроэрозию, вызванную электрическими разрядами во время
коммутация.
При использовании ШИМ-приводов для запуска двигателя с различными скоростями и точками нагрузки оценка срока службы двигателя
становится сложной комбинацией различных факторов, определяющих его износостойкость. Такими факторами могут быть:
и. Более высокая плотность тока при коммутации из-за пониженного КПД, высокого механического трения,
недостаточная смазка или рециркуляция тока.
ii. Высокая электроэрозия при скачках тока при использовании источников ШИМ.
iii. Повышенная рабочая температура двигателя из-за условий окружающей среды или высокой удельной мощности
двигатель, снижающий качество смазки.
В зависимости от области применения и типа источника питания двигателя ожидаемый срок службы может зависеть от
один или несколько факторов, описанных выше.
Для двигателей, в которых точка нагрузки требует, чтобы двигатель работал с умеренным крутящим моментом и скоростью, без осевых и радиальных
нагрузки, действующие на вал, и в умеренном диапазоне температур (обычно <60º C) износ, как правило, преобладает
электроэрозией. Тогда срок службы двигателя обратно пропорционален индуктивности и квадрату силы тока:
В приведенном выше уравнении рассматривается линейный источник питания или источник ШИМ с пренебрежимо малой пульсацией тока по сравнению с
к среднему току через двигатель.В практических сценариях пульсация может способствовать снижению двигателя.
жизнь значительно.
Случай-1: текущая пульсация менее 10%
С щеточными двигателями постоянного тока Portescap, чтобы снизить пульсации тока до менее 10%, диапазон частот
может достигать 40 кГц — 120 кГц.
потерь — это потери в диоде, потери на вихревые токи и гистерезис на трубке двигателя. Это бы
снизить общий КПД двигателя. Однако хороший дизайн обеспечит КПД 85-90%.
ШИМ.
Из ур. (12) и (13), и учитывая потери как 10% Имотора, как 10% Имотора,
Случай-2: текущая пульсация значительна
Уравнение (14) выполняется там, где Iloses меньше по сравнению с Imotor. Когда текущая пульсация высока, мгновенный ток
выброс через двигатель нагревает двигатель, и уравнение следует изменить как
Учитывая ШИМ с рабочим циклом 50%, когда пульсации максимальны, а средняя мощность двигателя равна «P»,
неотъемлемую часть можно переписать как
ПОВЫШЕНИЕ СРОКА СЛУЖБЫ ДВИГАТЕЛЯ С ШИМ
Есть несколько способов продлить срок службы двигателя при использовании ШИМ:
1.
 УМЕНЬШИТЬ ПУЛЬТЫ ТОКА В ДВИГАТЕЛЕ
УМЕНЬШИТЬ ПУЛЬТЫ ТОКА В ДВИГАТЕЛЕ
Текущую пульсацию можно уменьшить, увеличив частоту ШИМ. Если частота ШИМ значительно
чем выше постоянная времени двигателя L / R, пульсация уменьшается. Для конструкции Portescap без сердечника
с точки зрения срока службы двигателя рекомендуется пульсация <10%.
Другой общий интуитивно понятный подход к уменьшению пульсаций тока — это добавление внешней индуктивности в двигатель.
цепь, которая действует как фильтр тока. Это обычно повышает эффективность.Однако наличие
индуктор ухудшает общую электроэрозию системы щеточно-коммутатор, поскольку электроэрозия непосредственно
пропорционально индуктивности цепи. Следовательно, если только эффективность и нагрев двигателя не являются единственными проблемами,
мы не рекомендуем это решение.
2. КОНСТРУКЦИЯ ПРЕОБРАЗОВАТЕЛЯ DC-DC.
В конструкциях, подобных показанной на рис. 8, эффективность системы резко повышается, а щетка двигателя
срок службы лучше по сравнению с решением, в котором в цепь добавлена внешняя индуктивность.
Чтобы оптимизировать схему, пульсации напряжения, заданные уравнением. 18, следует свести к минимуму. Значение менее 10% является
Достаточно хорошо с практической точки зрения работы двигателя.
Из приведенного выше уравнения, при более высоких частотах значение индуктивности и конденсатора уменьшится и
следовательно, общая упаковка привода ШИМ уменьшится. Кроме того, ультразвуковые колебания могут быть вызваны
в роторе при движении двигателя на более низких частотах. Поэтому рекомендуется приводить двигатель в
частоты выше 20 кГц.
Заключение
Для приложений с батарейным питанием, где используются миниатюрные двигатели, эффективность приложения определяет
цикл зарядки аккумуляторов. ШИМ-привод является преимуществом, так как позволяет двигателю работать с разными скоростями.
Однако необходима точная конструкция ШИМ, чтобы гарантировать, что пульсации тока и напряжения незначительны и
моторная жизнь не пострадала.
Инженеры
Portescap могут помочь вам спроектировать правильный ШИМ в соответствии с потребностями вашего приложения, а также выбрать
подходящий двигатель из широкого ассортимента предлагаемой продукции. Поговорите с одним из инженеров Portescap, чтобы обсудить
Поговорите с одним из инженеров Portescap, чтобы обсудить
ваше приложение. Исходя из требований текущей пульсации и продолжительности жизни, мы поможем вам спроектировать
правая частота ШИМ и рабочий цикл. Это поможет вам максимизировать производительность вашего приложения и расширить
срок службы батареи.
Ваше полное руководство по широтно-импульсной модуляции 2021
Если вы такой же энтузиаст электроники, как я, рано или поздно вы столкнетесь с вопросом о том, что такое pwm и в чем его польза?
Именно эта потребность в этом вопросе возникнет, потому что вы захотите обеспечить переменное питание для ваших выходных компонентов.
Допустим, вы хотите сделать светодиоды ярче или ярче, или, возможно, вы хотите контролировать скорость вращения вентилятора или двигателя.
Или, может быть, вы хотите заставить эти светодиодные ленты танцевать с разной интенсивностью.
В этом посте мы собираемся обсудить все, что вы, возможно, хотели бы знать о широтно-импульсной модуляции .
Не только мы собираемся понять, что такое PWM .
В этом посте я расскажу вам ДВА ПРОСТОГО МЕТОДА , которые вы можете использовать для создания сигналов ШИМ.
В одном методе вы будете генерировать ШИМ С AURDUINO , а в другом методе вы будете генерировать ШИМ, используя простую схему таймера 555 .
И не беспокойтесь, все схемы, связанные с проектом, будут предоставлены вам для загрузки.
Итак, я вас прикрыл.
PWM Полная форма: что означает PWM?
PWM означает широтно-импульсную модуляцию .
Широтно-импульсная модуляция — это метод эффективного снижения мощности, подаваемой в цепь нагрузки / выхода, путем непрерывного включения и выключения источника питания / напряжения с очень высокой скоростью.
Так зачем кому-то это нужно делать правильно?
Ну, простой ответ — это то, как вы управляете скоростью двигателя в электронной схеме. Или яркость светодиодной или светодиодной ленты в вашем домашнем декоре.
По-прежнему не понимает, как это делает ШИМ?
Не волнуйтесь.Я был на твоем месте.
Итак, чтобы иметь больше ясности в том, что такое ШИМ и как его использовать, давайте обсудим более традиционные способы управления мощностью, подаваемой на нагрузку.
Итак, как только вы узнаете, какими способами осуществляется подача питания, у вас будет четкое представление о том, насколько эффективен ШИМ.
Плюс это весело .
Метод 1. Снижение мощности источника
Итак, это один из самых простых способов управления выходным напряжением нагрузки.
Это так просто, что глупо тебе это рассказывать. Ну я такой глупый , кого это волнует.
Таким образом, вы подключаете нагрузку, светодиод, двигатель или что угодно к источнику питания лабораторного испытательного стенда, а затем управляете мощностью, выдаваемой, вращая ручку до нужного вам значения.
Так например, если у вас на выходе горит светодиод и по мере того как вы постепенно увеличиваете напряжение на источнике.
Ток через светодиод будет увеличиваться, и если вы сохраните уровень напряжения на уровне, на который рассчитан ваш светодиод, вы увидите, как он тускнеет и становится ярче пропорционально значению напряжения, которое вы отпускаете.
Просто, не правда ли.
Но это не везде будет применимо?
Да, если вы просто тестируете что-то для более крупного проекта или просто тестируете устройство в целом, это быстрый и грязный способ сделать это.
Но встроенная система , как правило, является автономным устройством и будет далеко от вас, чтобы контролировать все это вручную и говорить об утомительных способах использования технологий.
Метод 2: Использование потенциометра
Так что, если вы не похожи на меня, скорее всего, в вашей старшей школе на вас обратили внимание.
И если да, то этот сегмент будет очень легко понять.
Помните это?
Источник: Викимедиа. Поскольку я был слишком ленив, чтобы создать один
, вы, конечно же, не сделали этого.
Не волнуйтесь, вот что это означает: с помощью изменяя ручку на моем потенциальном делителе или потенциометре, я контролирую напряжение, которое подается в мою цепь нагрузки.
Если вам все еще непонятно, не волнуйтесь. Очень скоро я собираюсь создать проект DIY, в котором я проясню это в подробных деталях, чтобы вы могли прояснить это.
А пока просто поймите теорию и основы этого.
Какие проблемы в этом устройстве и как их решает PWM ?.
Теперь, когда мы обсуждали это ранее, проблема с методом 1 не практична.
Если вы создаете автономный проект, вы просто не можете развернуть блок питания на испытательном стенде.
А проблема с методом 2 два раза.
Во-первых, это очень пассивный способ передачи энергии.В том смысле, чтобы изменять мощность на выходе, вы должны рассеивать мощность, которую вы не хотите передавать на потенциометр.
Эта энергия просто превращается в тепло и уходит.
Во-вторых, если вы хотите варьировать мощность в мощных устройствах, таких как светодиодные ленты, силовые двигатели и тому подобное.
Вам лучше убедиться, что потенциометр, который вы используете, мощный.
Потому что он должен обладать большим сопротивлением и, следовательно, выделять тепло.
Потому что это то, что на самом деле представляет собой потенциометр на конце. Сопротивление.
Преимущества ШИМ
Итак, я думаю, это то, о чем вы будете иметь четкое представление.
Преимущества ШИМ заключаются в том, что он устраняет все недостатки других методов, которые мы только что обсудили.
На самом деле для генерации ШИМ требуется очень простая схема, и мы собираемся обсудить это чуть позже.
Но просто чтобы вы знали, что мы увидим два метода: один, в котором мы генерируем ШИМ с помощью Arduino , а другой, где мы генерируем ШИМ с использованием таймера 555 .
Как работает ШИМ?.
Итак, как работает ШИМ и чем отличается схема широтно-импульсной модуляции.
Хорошо, в случае ШИМ мы по-прежнему будем применять фиксированные уровни напряжения к цепи нагрузки.
Просто приложенный уровень напряжения будет применяться на своем пиковом значении в течение определенного периода времени, продиктованного этим словом, называемым рабочим циклом .
Например, предположим, что вы хотите управлять скоростью двигателя. А 5 В — это пиковое значение, на которое рассчитан двигатель.Как правило, это больше, но только для примера рассмотрим это.
Общие сведения о рабочем цикле
И в pwm мы будем подавать импульс 5 В в течение фиксированного интервала времени. Этот фиксированный интервал времени, выраженный в процентах, для которого мы собираемся приложить 5 Вольт, называется рабочим циклом.
Итак, если сигнал ШИМ генерирует импульсы с коэффициентом заполнения 50 процентов.![]() Это означает, что 5 В будет применяться в течение 50 процентов времени, а в оставшееся время будет применяться 0 В.
Это означает, что 5 В будет применяться в течение 50 процентов времени, а в оставшееся время будет применяться 0 В.
Теперь я знаю, о чем вы думаете.
Не приведет ли это к мерцанию светодиода?.
Абсолютно нет. Восприятие времени в электронном мире настолько быстрое, что не заметить его глазами.
В результате средняя мощность, подаваемая на светодиод или двигатель, в этом случае составляет всего 50% от того, что вы ожидаете, если бы вы использовали полную мощность от источника.
Итак, если сигнал ШИМ имеет рабочий цикл 50%, вы можете ожидать, что светодиод станет ярче до половины своей максимальной мощности.
Или в случае управления двигателем с широтно-импульсной модуляцией двигатель будет работать со скоростью 50% от максимальной номинальной скорости.
Теперь вы можете понять, что произошло бы, если бы рабочий цикл составлял, скажем, 75%.
Видите, я знал, что вы умны. Не сомневайтесь в себе.
Схема широтно-импульсной модуляции
: как ее создать?
Таким образом, в конечном итоге весь этот процесс происходит очень быстро, и в конце вы увидите светодиод, мощность которого либо повышается, либо снижается в зависимости от того, какой рабочий цикл применяется.
И как только вы овладеете этой техникой ШИМ, в которой вы фактически регулируете рабочий цикл подаваемого сигнала, вы можете использовать эту технику для применения переменного источника питания практически к любой выходной нагрузке.
Двигатели, светодиоды, силовые светодиоды, светодиодные ленты список бесконечен и продиктован вашим творчеством.
Итак, если обобщить весь процесс, мы обеспечиваем напряжение регулируемым прерывистым способом, что в конечном итоге приводит к контролируемой подаче выходной мощности.
Давайте продолжим и обсудим, как приступить к созданию схемы ШИМ.
Итак, каковы возможные причины, по которым вы хотите его создать?
Что ж, если вы такой же энтузиаст электроники, как я, вам нужно иметь эти базовые схемы на ходу.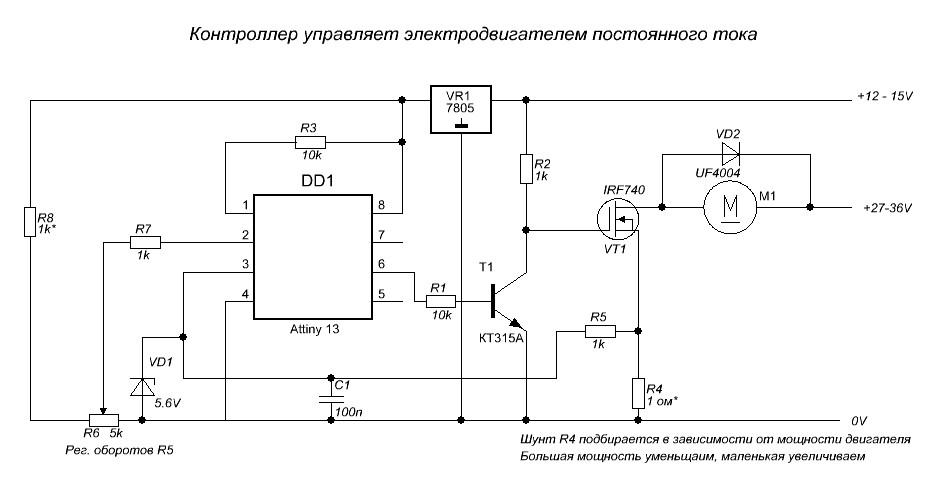
И не говоря уже о том, что если вы новичок, это, вероятно, идеальные схемы, которые вы должны с нетерпением ждать, чтобы сделать их и познакомиться с практичной электроникой.
Кроме того, мне не нужно повторять, как управление мощностью с помощью ШИМ приводит к повышению общей эффективности схемы.
Потому что здесь вместо рассеивания мощности в пассивном элементе вроде резистора или потенциометра. Вы отключаете подачу питания от источника и пропускаете только то, что необходимо, через рабочий цикл сигналов.
Это была основная теория, лежащая в основе того, что на самом деле представляет собой pwm .
А теперь давайте посмотрим, как на самом деле создать этот переменный сигнал, который вы можете использовать для отключения вашего светодиода или любого электронного компонента, на который вы хотите подавать переменное питание.
ШИМ с Arduino
Первый метод, который мы собираемся обсудить для генерации ШИМ, связан с Arduino.
Не волнуйтесь, если у вас нет Arduino или по какой-то причине вы не можете его собрать для себя, потому что мы собираемся изучить, как это можно сделать и без Arduino.
Но если вы являетесь электронным энтузиастом, как и я.
Я обязательно возьму один. К тому же это довольно дешево. Вы можете получить его здесь.
У меня есть один в моем доме, и я собираюсь использовать его, чтобы показать вам, как генерировать ШИМ-сигнал от Arduino.
Для выполнения этой задачи мы собираемся использовать функцию AnalogWrite нашей Arduino.
В вашей консоли кодирования для aurduino ваш код будет выглядеть примерно так.
Все, что нам нужно сделать сейчас, это задать этому параметру «значение потенциометра» значение от 0 до 255.
Где 0 будет равно 0 В.
А 255 будет равно 5 В.
Аналоговый вход в этом случае может быть снабжен потенциометром, и этот аналоговый вход может использоваться для изменения функции AnalogWrite ().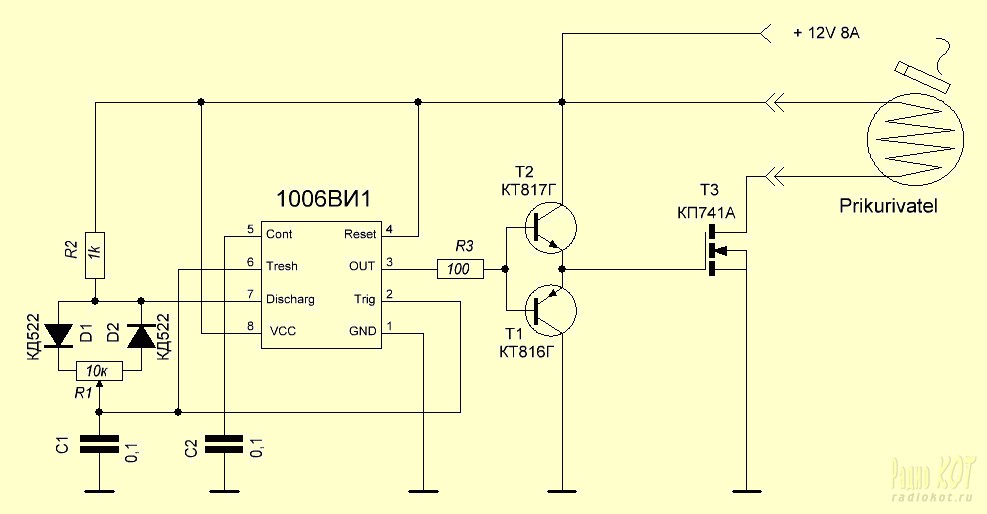
Вот схема, на которую вы можете сослаться.
Итак, позвольте мне объяснить всю идею, стоящую за этим.
Аналоговый вход поступает от потенциометра, который отображается на выходное значение в диапазоне от 0 до 255, что, в свою очередь, соответствует пропорциональному выходному напряжению на выходном контакте Arduino, к которому может быть подключен наш светодиод или двигатель.
Я понимаю, что некоторые термины, которые я использую, могут быть не слишком удобными для новичков, но я постоянно обновляю янтры новыми учебниками, к которым вы можете обратиться за разъяснениями.
Если сомнения не исчезнут, вы всегда можете найти меня в разделе комментариев.
PWM с микросхемой таймера 555,
При построении схемы ШИМ с ардуино можно быстро.
Возможно, вам не всегда захочется тратить ардуино или микросхему микроконтроллера на такую простую задачу.
Особенно, если вы работаете над большим проектом и хотите, чтобы его первоначальные затраты были низкими.
Или, может быть, модуль вашего проекта уже использует Arduino, и вы хотите, чтобы PWM обрабатывался с помощью печатной платы «создать и забыть».
В любом случае, если это то, что вы хотите, вам нужно обратиться к дедушке всех электронных микросхем, 555 Timer IC .
О, как я повеселился с этим ребенком.
Забавно, не говоря уже о сеансе выдергивания волос, когда после того, как все было сделано правильно, схемы все еще не работали. :П.
Хорошие времена.
Теперь работать с ним очень легко, если вы знаете, что делает каждый вывод.
Вот схема, которую следует использовать для создания схемы ШИМ с использованием микросхемы таймера 555.
Рабочий цикл снова будет контролироваться потенциометром, как показано.
Вывод 3, как вы можете видеть, будет выводить сигнал ШИМ, который можно использовать для управления любой нагрузкой, которую мы можем пожелать.
А как насчет цепей с высокими требованиями к мощности
Хороший вопрос.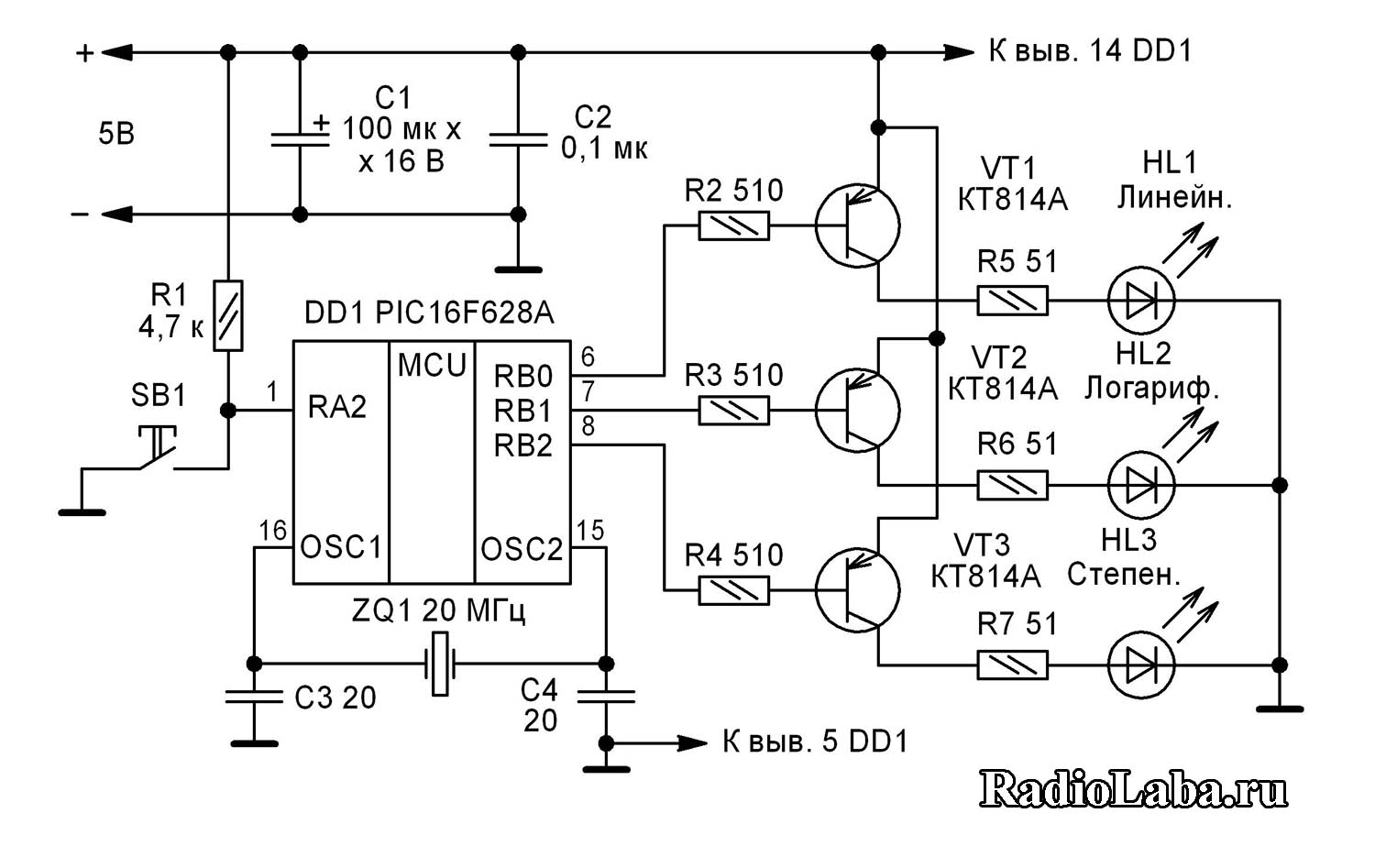
Одна вещь, которую мы должны понимать при работе с электроникой, заключается в том, что большую часть времени мы работаем с устройствами, требующими низкого напряжения.
Но что также верно, как экстраполировать эти проекты или работать на сценарии применения высокого напряжения.
В этом случае, например, мы можем захотеть изменить мощность, подаваемую на светодиодную ленту или двигатели большой мощности.
Мы достигаем этого с помощью полевого МОП-транзистора. Я не хочу сейчас вдаваться в подробности MOSFET.
Просто поймите, какое практическое значение имеет полевой МОП-транзистор для хобби и практической электроники и как он используется здесь в схемах ШИМ.
Если вы обратили внимание на мою схему схемы ШИМ таймера 555, вы бы заметили, что я применил там полевой МОП-транзистор.
И вот как вы собираетесь включить это в свои проекты.
Но чтобы вы не запутались, вот как вы подключаете разные пины.
ШИМ-сигнал с выхода Arduino или контакта 3 схемы таймера 555 идет на затвор , короткая сторона / отрицательная сторона вашего светодиода идет на сток, а исток полевого МОП-транзистора будет подключен к общей земле всех устройств или, другими словами, отрицательный полюс вашего аккумулятора.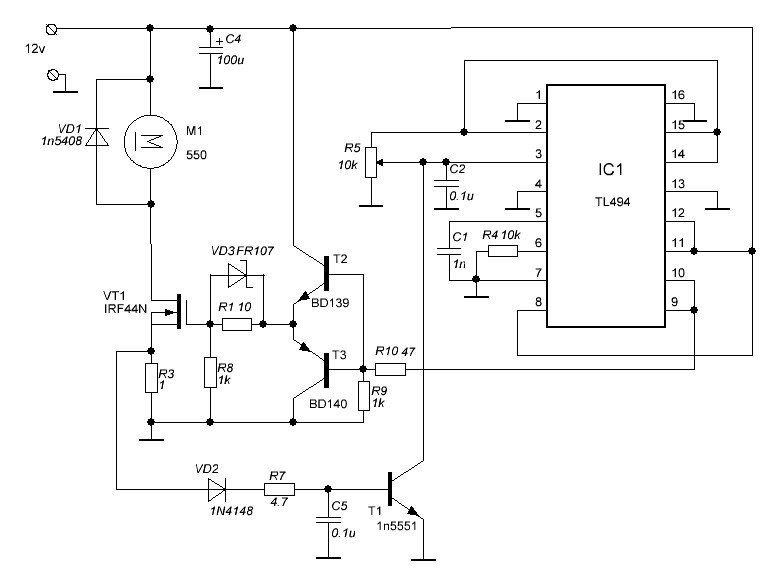
Что такое ШИМ-контроллер?
Хотите верьте, хотите нет, я включаю этот сегмент после того, как я уже закончил эту публикацию.
Произошло то, что я получал много запросов от наших читателей, спрашивающих, что такое контроллер pwm.
Эммм, ребята, мы только что построили. Лол: D.
Да, это устройство или схема, генерирующая ШИМ, которую мы только что создали, на самом деле является контроллером ШИМ . Схема, которая обеспечивает или управляет сигналом ШИМ.
Но по правде говоря, эта электронная терминология может сбивать с толку, так что хорошо, что вы задали этот вопрос, и я включаю этот отрывок, чтобы прояснить путаницу, которая может возникнуть у любого другого читателя.
Другое, о чем спрашивали люди.
Ну, Раджпут, все в порядке, но что такое, я не хочу делать это. У меня просто нет времени, и мне нужен ШИМ-контроллер fast для моих проектов, где я могу его получить?
Итак, для всех этих людей я исследовал онлайн-мир и пришел с одними из лучших контроллеров pwm, которые я смог найти, которые вы можете купить прямо сейчас.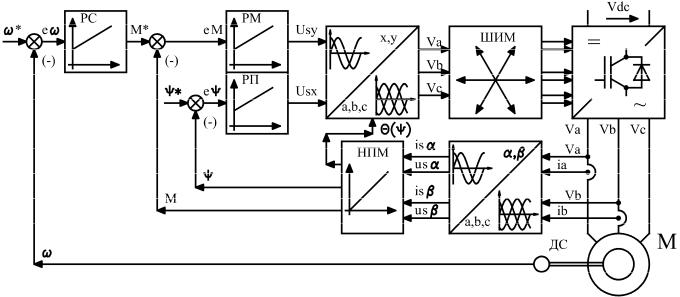
ПРИМЕЧАНИЕ. Это не исчерпывающий список. Продукт будет зависеть от ваших потребностей, пожалуйста, проверьте характеристики и мощность перед покупкой, чтобы убедиться, что он соответствует вашим требованиям.
Что такое вентиляторы с ШИМ?,
Так же, как это было с контроллерами ШИМ, не запутайтесь, когда вы увидите слово «Вентиляторы ШИМ». Вентиляторы PWM — это просто вентиляторы, которые регулируются с помощью PWM.
Теперь поклонники ШИМ находят в первую очередь ориентир при работе с компьютерами. В нашем руководстве по сборке собственного ПК мы подробно обсудили, как собрать собственный компьютер, и обсудили важность вентиляторов для правильного охлаждения вашей системы.
Вентиляторы и насосы
PWM могут изменять свою скорость и расход воздуха в зависимости от температуры компонента.
Для использования этой функции вам понадобится материнская плата с PWM-заголовком.
Итак, когда вы устанавливаете вентиляторы с ШИМ на своем компьютере, вы можете догадываться, что произойдет.
Ага, регулировать скорость вашего ШИМ-вентилятора можно с помощью температуры объекта, для охлаждения которого он развернут.
Какая будет польза ?.
Таким образом, вместо вентилятора, который постоянно работает и рассеивает энергию, у вас есть интеллектуальный механизм, который отключается, когда охлаждение не требуется.
Разве это не фантастика?.
Надеюсь, теперь вы понимаете, насколько невероятна эта изящная маленькая техника широтно-импульсной модуляции .
Заключение
Эти дети были моим простым и быстрым способом, с помощью которого вы можете создавать сигналы ШИМ и выражать свое творчество в том, что касается практической электроники.
Я очень хорошо понимаю, что хотя некоторые ребята, имеющие неплохой опыт работы с электроникой, все поняли бы.
Могут быть люди, которые хотели бы получить больше ясности в отношении крошечных деталей здесь и там в нашем обсуждении.
Ну, вот почему у нас есть раздел для комментариев, не так ли.
Не стесняйтесь спрашивать или предлагать все, что говорит ваше сердце, и я постараюсь уточнить или ответить, насколько я понимаю.
И все, что не входит в мою область понимания, я направлю вас к кому-нибудь или чему-то, кто знает лучше.
Надеюсь, вам все нравится здесь, на янтрах.
Я вернусь с такими классными сообщениями.
А пока наслаждайтесь выражением своего творчества и не забудьте поделиться этим с нами так же, как вы поделитесь этим постом среди своих друзей и близких 🙂 🙂 :).
Cya скоро. С любовью.
Намаскарам _ / \ _ 🙂
Вы успешно подписались!
AN-1117 ШИМ-контроллер двигателя с регулировкой скорости вращения
Содержание
Для получения сопутствующих документов и программного обеспечения посетите:
https: // www.dialog-semiconductor.com/products/greenpak
Загрузите наше бесплатное программное обеспечение GreenPAK Designer [1], чтобы открыть файл . gp [2], и используйте инструменты разработки GreenPAK [3], чтобы закрепить дизайн в вашей собственной индивидуальной ИС за считанные минуты.
gp [2], и используйте инструменты разработки GreenPAK [3], чтобы закрепить дизайн в вашей собственной индивидуальной ИС за считанные минуты.
Dialog Semiconductor предоставляет полную библиотеку заметок по применению [4]
с примерами дизайна, а также пояснениями к функциям и блокам
внутри Dialog IC.
- Программное обеспечение GreenPAK Designer, загрузка программного обеспечения и руководство пользователя, Dialog Semiconductor
- AN-1117 ШИМ-регулятор скорости вращения двигателя вентилятора.gp, файл дизайна GreenPAK, Dialog Semiconductor
- Инструменты разработки GreenPAK, веб-страница инструментов разработки GreenPAK, Dialog Semiconductor
- Примечания по применению GreenPAK, веб-страница замечаний по применению GreenPAK, Dialog Semiconductor
- SLG46531
Техническое описание, Dialog Semiconductor
Автор: Ю-Хан Сунь
Устройство GreenPAK можно использовать в приложениях с высокой мощностью, управляя
Полевой транзистор для привода двигателя i. е. понижающий преобразователь постоянного тока в постоянный с ШИМ. В этом примечании к приложению мы
е. понижающий преобразователь постоянного тока в постоянный с ШИМ. В этом примечании к приложению мы
покажет, как разработать программируемый вентилятор с ШИМ-регулированием скорости с обратной связью.
контроллер, использующий обратную связь по частоте вращения и I2C. Средняя процентная погрешность меньше
более 2,5%, а минимальные и максимальные значения были менее 15%. Их можно улучшить с помощью
увеличение разрешения за счет увеличения времени установления.
Три провода 3-проводного вентилятора — это VDD, GND и выход тахометра.
Рисунок 1. Вид на уровне системы
Двигатель, который вращает вентилятор, является бесщеточным и потребляет около нуля.2А при 5,0 В. В
В этой схеме скорость двигателя вентилятора пропорциональна входной мощности,
который импульсно модулируется PFET для источника питания. Затвор PFET
контролируется выходом ШИМ GreenPAK, PIN18, как показано на рисунке 1. ШИМ
выходная мощность определяется обратной связью по частоте вращения на эффекте Холла.![]()
Датчик эффекта Холла расположен между двумя катушками вентилятора и является
обратная связь тахометра от вентилятора в GreenPAK.Каждый край зала
Датчик эффекта означает один оборот. Измеряя время между двумя
оборотов, мы можем рассчитать скорость, с которой двигатель вращается, и
соответствующим образом отрегулируйте мощность двигателя.
Как показано на Рисунке 1, напряжение питания 5 В, что находится в пределах GreenPAK.
рабочий предел. Схема ниже представляет собой понижающий преобразователь постоянного тока с одним полевым транзистором.
на высокой стороне — ограничивающий диод и LC-фильтр.
В этой схеме используются все восемь состояний ASM.Состояния обозначены как в
Рисунок 2. Исходное состояние — это состояние сброса. В состоянии сброса ШИМ
выход принудительно низкий.
По инерции вентилятор не начинает двигаться, пока мы не преодолеем статическое электричество.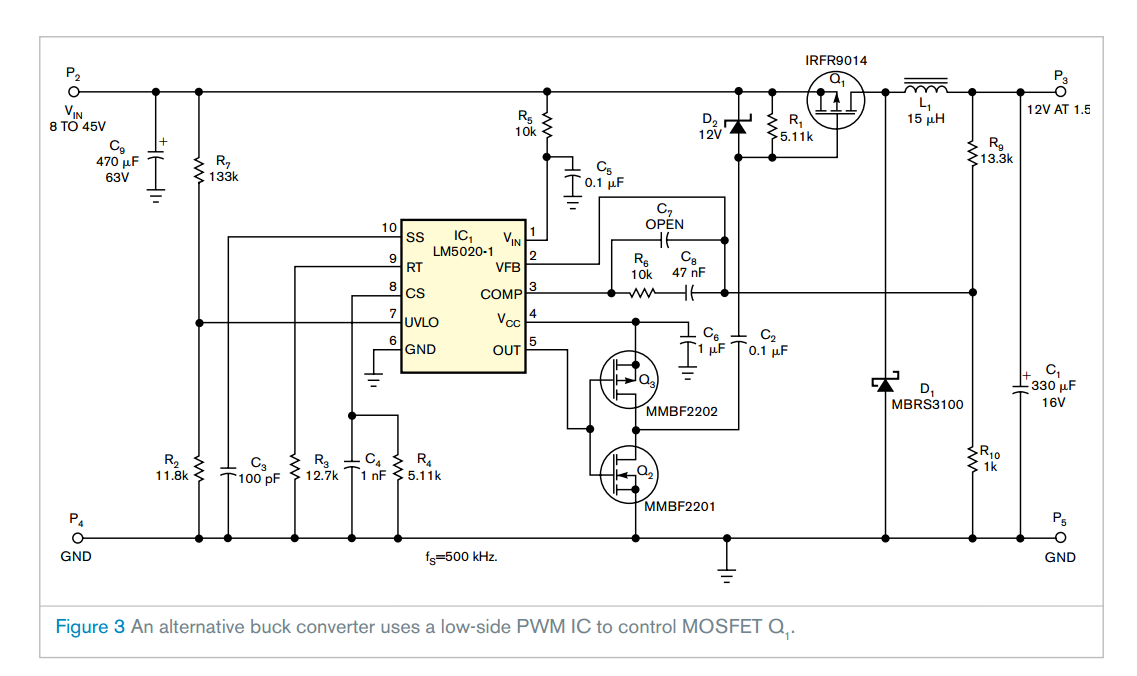
трение. Этот минимальный рабочий цикл обычно составляет 30%.
Когда ASM включен, мы переходим в состояние «Overdrive», где
выход может работать на максимальной мощности, 100% рабочий цикл, в течение 3
секунд.Этот начальный удар предназначен для преодоления статического трения,
позволяя двигателю начать вращаться.
Оттуда мы произвольно выбираем вход в состояние PWM Up. Если частота вращения
слишком высоко, GreenPAK самокорректируется и перейдет в режим PWM Down. Штат
машина продолжает переключаться между PWM Down и PWM Up. Когда мы достигнем
в устойчивом состоянии переключение будет становиться все более и более стабильным.
Если желаемая частота вращения слишком низкая или слишком высокая, GreenPAK будет
в конечном итоге достичь рабочего цикла 100% или 0%.Чтобы предотвратить ШИМ
оборачиваясь, выход блокируется в состоянии «Stop High» или «Stop Low».
В этих состояниях ШИМ принудительно повышается и понижается.
«Buffer Low» и «Buffer High» являются промежуточными состояниями для предотвращения нежелательных
Переходы между состояниями ASM. Конечный автомат использует детекторы фронта для «Stop Low».
и «Stop High». Если в этот момент ШИМ изменит направление на противоположное,
В самом первом периоде будет преимущество. Если бы не было состояния Buffers, мы
будет немедленно переходить из одного состояния остановки в другое состояние остановки.Следовательно,
Состояние буфера — это промежуточное состояние для предотвращения зацикливания.
Рисунок 2. Конечный автомат ASM
Рис. 3. Входной сигнал частоты вращения для частотного детектора FSM0
Основными входами ASM являются «Уменьшение ШИМ» и «Увеличение ШИМ», два
инвертированные сигналы. Они обозначают, когда увеличивать или уменьшать ширину ШИМ, как
показано на рисунке 4. «Увеличить ШИМ» переводит ASM с ШИМ вниз на ШИМ.
Вверх и «Уменьшить ШИМ» переводит ASM из режима ШИМ в режим ШИМ вниз.
Рисунок 4. Входы ASM
FSM0 — это частотомер. В режиме определения частоты время
между двумя входными фронтами измеряется и сравнивается с данными счетчика. Если
длина больше, скорость слишком мала. Если длина короче, скорость
слишком быстро. Выходной сигнал FSM0 регулирует понижающий DC-DC, чтобы накачать больше или
меньшая мощность в цепи вентилятора.
FSM0 настроен как детектор фронтовой частоты, потому что тахометр
В этом приложении US1881 используется датчик Холла с фиксацией.Значение
каждое вращение переключает выход тахометра. Поэтому каждое ребро, будь то
падение или подъем представляет собой одно вращение на 360 градусов. В этом примере
Целевое число оборотов в минуту имеет период 40 мс.
Рисунок 5. Конфигурация FSM0
Входом для детекторов фронта является логическое И для сигналов установки и сброса. От
проверяя перекрытие, мы можем узнать, когда рабочий цикл достиг
100% или 0%. Затем выходы обнаружения фронта переводят ASM в состояние «Stop High».
Затем выходы обнаружения фронта переводят ASM в состояние «Stop High».
и «Stop Low».
Поскольку самые первые сигналы Set и Reset выхода ШИМ перекрываются по умолчанию, мы
включить промежуточные состояния, чтобы предотвратить переход состояний
неправильно.
Рабочий цикл ШИМ контролируется сигналами установки и сброса, которые поступают от
выход CNT5 / DLY5 и CNT6 / DLY6. Настройки идентичны
показано на рисунке 6.
Для того, чтобы увеличить и уменьшить ШИМ, сдвигаем Set и Reset
сигналы относительно друг друга для достижения более короткого или более длительного рабочего цикла.См. Временную диаграмму на Рисунке 8. В зависимости от текущего состояния один из двух
Блоки CNT / DLY получат дополнительные часы, сдвигая вывод влево,
раньше во времени. Если Set смещается, ШИМ увеличивается. Если Reset смещается, ШИМ
уменьшается. Это контролируется сигналами «Reset» и «Set», как показано на
Рисунок 7.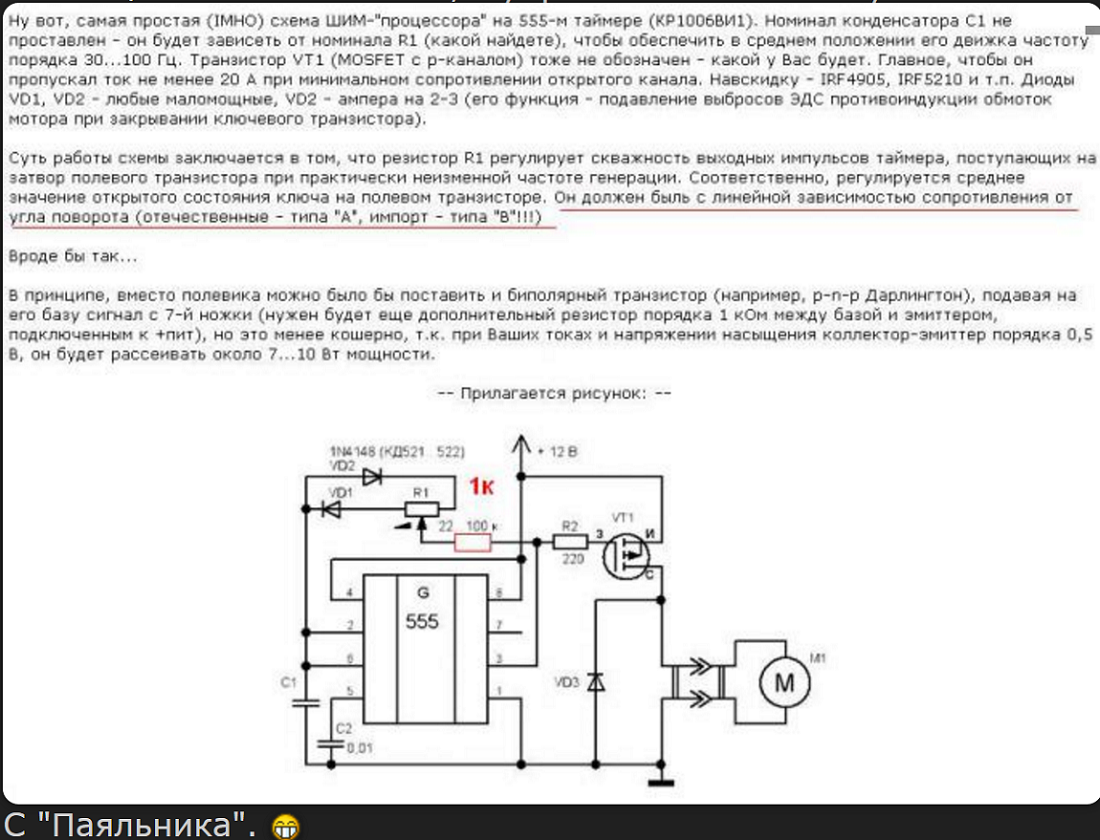
Дополнительные часы срабатывают каждые 50 периодов, обеспечивая время для механических
мир, чтобы догнать электрические сигналы.Это период обновления,
установлен CNT4 / DLY4. Каждый период обновления, задержка конвейера и 2-битный LUT2
генерирует импульс на входы 3-битного LUT0 и 3-битного LUT1 IN0. Если XORed
с обычным источником синхронизации мы сгенерируем дополнительный импульс.
Используются только четыре выхода ASM. «Shift_CNT6» и «Shift_CNT5» входят в SR
Счетчик логики и контроль переключения. Они используются для выбора CNT
получает дополнительные часы, представляющие текущее направление, в котором находится ШИМ.
собирается в.
Рисунок 6. Установка и сброс для выхода ШИМ
Рисунок 7. Установка и сброс для выхода ШИМ
Рисунок 8. Установка и сброс для выхода ШИМ
Рисунок 9. Выходы ASM и конфигурация выходов
Как видно из выходной таблицы ASM на рисунке 9, оба параметра Reset и Set имеют высокий уровень, если
при обратном отсчете мы ведем обратный отсчет, а оба — Low. Чтобы остановить лишние часы
счетчик, сброс и установка — противоположности. Reset — высокий, Set — низкий.Этот
удостоверяется, что они оба выбирают обычный источник синхронизации.
«Force 0» и «Force 100» указывают, когда логика PWM достигла 100% и
0% и маскирует защелку SR. ‘Force 0 принудительно закрывает PFET для Stop Low,
Низкий буфер и состояние сброса. ‘Force 100 заставляет PFET открываться для Stop High,
Состояния Buffer High и Overdrive.
3-битный LUT2 — это фиксатор SR. Если CNT6_out равен 1, защелка установлена.Если
CNT5_out — это логическая 1, защелка сброшена. 3-битный LUT6 блокирует защелку SR. Если
Set High — высокий, выход принудительно высокий. Если Set low — высокий, выход
принудительно низкий. Оба сигнала никогда не будут высокими одновременно. Если оба
сигналы низкие, используйте инверсию 3-битного LUT2.
Рис. 10. Вид проекта GreenPAK Designer
Чтобы изменить желаемое число оборотов в минуту, используйте I2C для записи значения счетчика FSM0. В
В
адрес слова находится по адресу 0xC5 и 0xC6.
См. Пример в Таблице 1 ниже. Если мы хотим записать в FSM0,
значение счетчика 0xDD, команда будет выглядеть так:
[0xSA 0xC5 0xE0 0x2E] например 1
[0xSA 0xC5 0x40 0x1F] например 2
Где SA — адрес подчиненного устройства.
Чтобы преобразовать обороты в минуту в данные счетчика, используйте уравнение ниже:
Данные счетчика зависят от внутреннего OSC GreenPAK. В этом дизайне
В идеале OSC должен быть 2 МГц / 8 = 250 кГц.Чтобы получить частоту вращения 25 Гц,
период должен быть 40 мсек, что соответствует данным счетчика 9998.
Поскольку фактическое значение OSC было измерено как 253 кГц, мы получаем 25,3 Гц.
вместо 25 Гц.
Таблица 1. Пример записи I2C об / мин
Слово Адрес | Текущее значение счетчика RPM / FSM0 | Пример 1 | Пример 2 |
0xC5 0xC6 | 0x10 0x27 | 0xE0 0x2E | 0x40 0x1F |
Десятичное | 9998 | 11998 | 7998 |
Период | 40 мс | 48 мс | 32 мс |
Частота / об / мин | 25 Гц | 20. | 31,25 Гц |
Фактическая частота | 24,4 Гц | 21,0 Гц | 31,4 Гц |
Мин. | 23.2 Гц | 18,9 Гц | 28,6 Гц |
Макс | 27,8 Гц | 22,8 Гц | 34.4 Гц |
ул. | 478 мГц | 385 мГц | 520 мГц |
 8 Гц
8 Гц  Дев.
Дев. Процентная ошибка составила 2,4%, 1,0% и 0,5% из трех приведенных выше примеров.В
чем дольше устройство работает, тем лучше средний процент погрешности. Немного
ошибка связана с подстройкой OSC, которая в нашем случае составила 253 кГц.
вместо 250кГц. ШИМ потребуется некоторое время для увеличения или уменьшения, пока он
достигает устойчивого состояния. После достижения устойчивого состояния конечный автомат будет
триггер между «PWM Up» и «PWM Down», который заставляет выход PWM
джиттер около среднего.
Это приводит к скачку минимальной и максимальной частоты вокруг среднего значения в зависимости от
от разрешения ШИМ.В приведенных выше примерах процентная погрешность минут
и максимальные частоты были в худшем случае, 15%. Чтобы уменьшить эту ошибку, мы можем
Чтобы уменьшить эту ошибку, мы можем
увеличьте значение счетчика CNT5 и CNT6 так, чтобы каждое приращение было
меньшая ширина ШИМ, что позволяет лучше контролировать частоту, но медленнее устанавливается
время.
Приведенная ниже функция была активирована через много секунд, когда на выходе ШИМ
достигла устойчивого состояния.
Рисунок 11.Форма волны вентилятора PWM
В устойчивом состоянии конечный автомат переключается с ШИМ вверх на ШИМ вниз.
ритмично.
Мы видим, что вход RPM имеет частоту 11,4 Гц или 88 мс. Тем не мение,
поскольку датчик на эффекте Холла является фиксирующим устройством, каждый край
интерпретируется как революция. FSM0 настроен на обнаружение обоих краев.
Таким образом, реальная частота вращения равна 22,8 Гц, или 45 мс, в два раза. Это
прямо около нашей цели 40 мс, которая была установлена значением счетчика в FSM0.
Канал 1 (желтый) — PIN # 18 (выход ШИМ)
Канал 2 (голубой) — PIN # 3 (об / мин)
Канал 3 (пурпурный) — входное напряжение вентилятора
Рисунок 12. Схема вентилятора с ШИМ
Схема вентилятора с ШИМ
На рисунке 13 показана функциональность, когда для данных счетчика FSM0 установлено значение
12000. Мы видим, что частота эффекта Холла составляет 9,42 Гц, что подразумевает число оборотов в минуту.
18,84 Гц.
Рис. 13. Форма сигнала вентилятора ШИМ Пример 1
На рисунке 14 показана функциональность, когда данные счетчика FSM0 установлены на 8000.Мы видим, что частота эффекта Холла составляет 14,8 Гц, что означает 29,6 об / мин.
Гц.
Рисунок 14. Форма сигнала вентилятора ШИМ Пример 2
Ниже представлен макет вентилятора PWM. Макет слева
имеет катушку индуктивности, PFET, диод и конденсаторы. СК ГринПАК находится в
Совет по оценке средств разработки.
Макетная плата справа соединяет внешние разъемы GreenPAK с
Датчик эффекта Холла, на который необходимо постоянно подавать питание.
На первом изображении ниже вентилятор остановлен, потому что схема ШИМ отключена.
Неполноценный. На втором изображении вентилятор работает, потому что схема ШИМ отключена.
Включено.
Контроллер двигателя вентилятора с ШИМ-регулировкой скорости является примером того, как ASM
может использоваться в контуре обратной связи для управления внешним двигателем. Мы используем
функция частотного детектора, позволяющая легко контролировать эффект Холла
Вход.Затем мы используем I2C для изменения опорной частоты. Целиком
Цифровая логика управления реализована в устройстве PAK таким образом, что из-за использования
ASM, его можно легко настроить.
Рисунок 15. Вентилятор отключен
Рисунок 16. Вентилятор включен
Напряжение ШИМ-тип Регулировка тока
Схематическое устройство цепи управления ШИМ-типа показано на рис. 3.11
НАПРЯЖЕНИЕ ТИПА ШИМ ТОК
ПРАВИЛО
Схема схемы управления ШИМ-типом представлена на рис.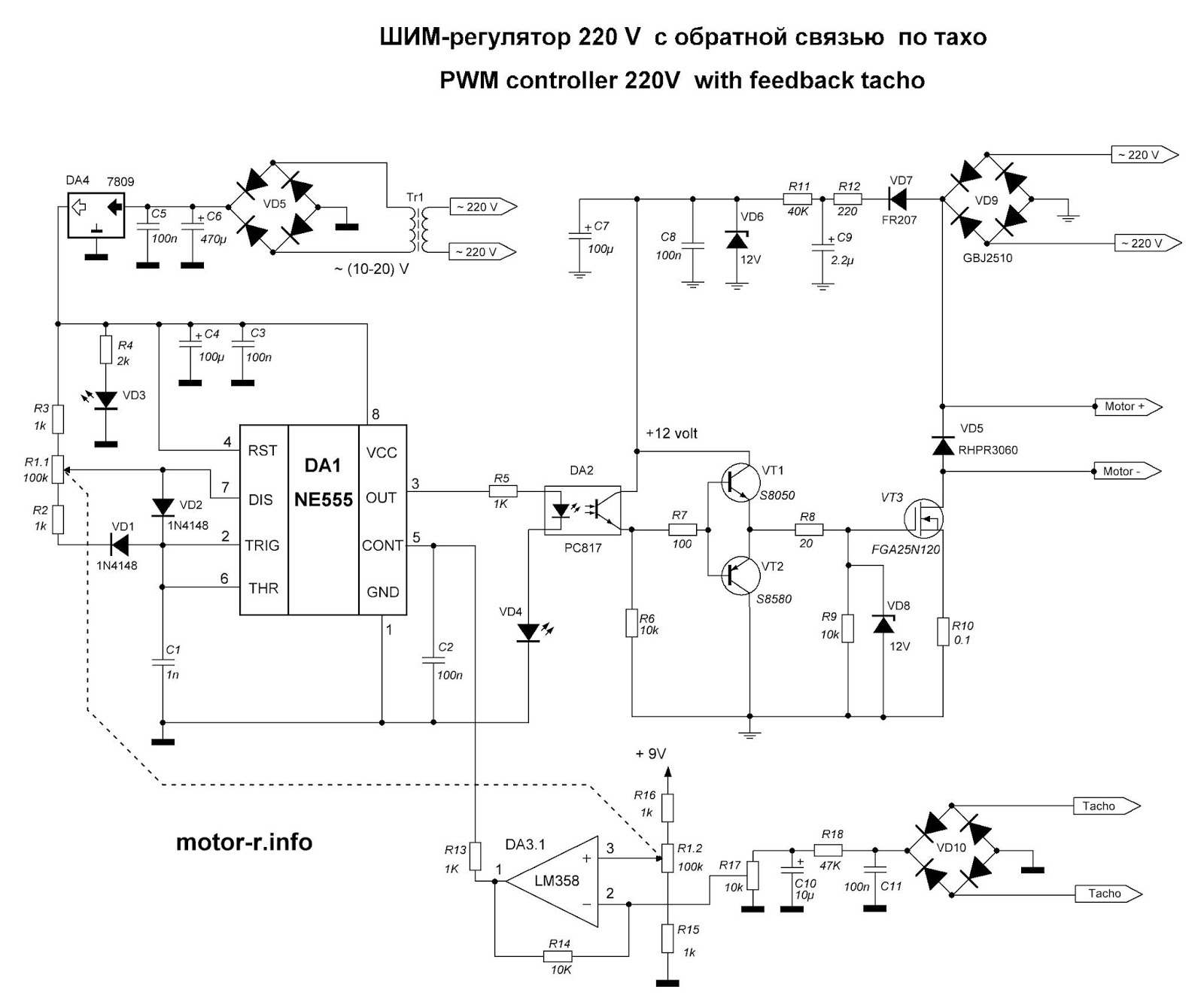 3,11
3,11
Принцип работы
Через
преобразователем (тахогенератором) механический сигнал (скорость) преобразуется в
электрический сигнал (ток), который подается с базы транзистора Т2.
Базовый ток Thos в сочетании с током коллектора протекает через эмиттер
транзистор T2 через CLR на
отрицательный
поставки.На основании сигнала обратной связи изменяется напряжение на фазе А.
Это напряжение обратной связи подается на один вход операционного усилителя, где
оно сравнивается с опорным напряжением, соответственно разница составляет
усиливается и подается на моностабильную схему. Эта схема модулирует импульс
ширина входящего сигнала в зависимости от потребности и модулированного сигнала
дается на базе T1. Этот сигнал комбинируется с током коллектора T1.
и протекает через фазу A как модулированный ток в зависимости от требований.Таким образом
ток регулируется или контролируется с помощью широтно-импульсной модуляции и ротора
Обратная связь.
А
желаемое будущее обоих методов управления состоит в том, что текущая форма волны стремится к
сохраняют ту же форму в широком диапазоне скоростей.
Когда
Рабочий цикл ШИМ достигает 100%, скорость двигателя можно увеличить, увеличив
период проведения. Эти увеличения в конечном итоге достигают максимальных значений, после которых
крутящий момент становится обратно пропорциональным квадрату скорости, но они могут
обычно удваивает диапазон скоростей при постоянном крутящем моменте.Диапазон скоростей, в котором
постоянная мощность может поддерживаться также довольно широкая и очень высокая максимальная
скорости могут быть достигнуты, как в синхронном реактивном двигателе, так и в индукционном
двигатель, потому что нет ограничений, налагаемых фиксированными двигателями, как в двигателях с постоянными магнитами.
Учебные материалы, Примечания к лекциям, Назначение, Ссылка, объяснение описания в Wiki, краткая информация
Специальные электрические машины — Импульсный электродвигатель: Тип ШИМ напряжения Регулировка тока |
| Характеристики зарядное устройство | ||
| Напряжение системы (аккумулятор) | 12/24 В автоматический выбор | |
| Номинальный ток заряда | 20 А | |
| Типы батарей | AGM, гель, залитый | |
| Датчик температуры аккумуляторной батареи | опционально, код товара 41500500 | |
Переключаемый выход (макс. ток) ток) | 20 А | |
| Энергопотребление (ночь) | ||
| Технические характеристики вход солнечной энергии (постоянный ток) | ||
| Тип панели (система 12 В) | 36 ячеек | |
| Тип панели (система 24 В) | 72 ячейки | |
| Макс.PV ток (Impp) | 20 А | |
| Рекомендуемая фотоэлектрическая мощность (система 12 В) | 360 Вт | |
| Рекомендуемая фотоэлектрическая мощность (система 24 В) | 720 Вт | |
| Общие характеристики | ||
| Охлаждение | пассивный | |
| Дисплей / считывание | ЖК-дисплей с подсветкой, показывающий мощность PV, мощность нагрузки, напряжение аккумулятора, ток заряда, предупреждения, состояние заряда аккумулятора, настройку аккумулятора | |
| Заземление | общее отрицательное заземление | |
| Степень защиты | IP23 | |
| Размеры, В x Ш x Г | 98 x 189 x 53 мм | |
| Масса | 0,5 кг | |
| Технические характеристики | ||
| Технологии | ШИМ (широтно-импульсная модуляция) | |
| Диапазон температур (темп.) | От -20 ° C до 50 ° C, снижение номинальной мощности> 40 ° C | |
| Размер кабеля | Максимум. 16 мм² | |
| Защиты | перегрев, перегрузка, высокое / низкое напряжение батареи, высокое / низкое фотоэлектрическое напряжение, короткое замыкание, обратная полярность и переходные процессы высокого напряжения | |
| Относительная влажность | 95% без конденсации | |
 9 х 7,4 х 2,1 дюйма
9 х 7,4 х 2,1 дюйма.