§13.4. Релейно-контакторноеуправление электродвигателями. Релейно контакторная система управления
Релейно-контакторное управление электродвигателями — МегаЛекции
Назначение релейно-контакторного управления. Релейно-контакторное управление позволяет осуществить автоматический, дистанционный пуск, изменение частоты вращения, останов, реверсирование, торможение и защиту двигателя. Этот вид управления относится к разомкнутым системам в том смысле, что он не охвачен обратными связями.
В результате этого возмущающее воздействие (например, изменение нагрузки на валу двигателя) изменяет заданный режим, т.е. приводит к изменению частоты вращения вала двигателя.
Для сложных приводов применяют замкнутые системы, т.е. системы автоматического регулирования, охваченные обратными связями.
В таких системах поддерживается заданный режим работы при наличии возмущающих воздействий (изменение нагрузки, напряжения питания и т.д.).
Изображение схем релейно-контакторного управления. Схемы релейно-контакторного управления вычерчивают как совмещенные или как элементные (развернутые). В совмещенных схемах все элементы аппарата размещают на чертеже так, как они расположены в натуре. Монтажные схемы вычерчивают как совмещенные. Совмещенные схемы громоздки и сложны для чтения. При проектировании электропривода используют развернутые схемы, облегчающие понимание работы установки. На развернутой схеме элементы силовой цепи и управления показаны разнесенными, так же как контакты и обмотки реле.
При, этом контакты аппаратов изображают в положении, которое соответствует обесточенному состоянию обмоток. В соответствии с этим все контакты делят на нормально открытые, или замыкающие (3), и нормально закрытые, или размыкающие (Р).
Когда катушка обесточена, цепь замыкающих контактов разомкнута, а цепь размыкающих контактов замкнута.
Схема управления и защиты асинхронного двигателя с помощью реверсивного магнитного пускателя. Магнитный пускатель состоит из одного или двух контакторов, смонтированных на общем основании и помещенных в металлический корпус.
Пускатели, как правило, снабжают встроенным тепловым реле. Магнитный пускатель с одним контактором называют нереверсивным. С его помощью осуществляют пуск, останов, защиту электродвигателя от самопроизвольных включений и перегрузок.
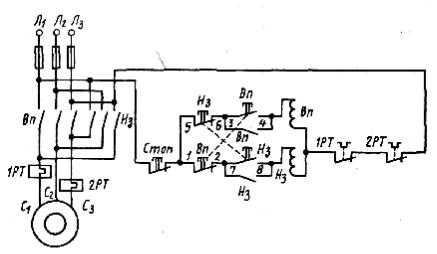
Магнитный пускатель с двумя контакторами называют реверсивным: он помимо перечисленных функций обеспечивает реверсирование двигателя. Рассмотрим работу реверсивного магнитного пускателя (рис. 4).
Пускатель содержит два контактора: один для пуска «вперед» (Вп), другой - для пуска «назад» (Нз).
Защита двигателя от токов короткого замыкания осуществляется тремя плавкими предохранителями, а от перегрузок - двумя тепловыми реле: 1РТ и 2РТ. Обмотки статора двигателя подключают к сети через плавкие предохранители, рабочие контакты Вп или Нз контакторов и нагревательные элементы тепловых реле 1РТ и 2РТ (для двух фаз).
Работа схемы при пуске «вперед» происходит так.
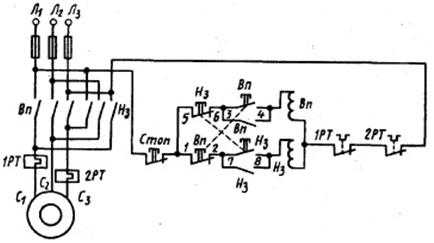
Рис. 4 Схема реверсивного магнитного пускателя
При нажатии кнопки Вп замыкаются контакты 3, 4 и к обмотке контактора Вп подводится напряжение от зажимов сети Л1 - Л3. Контактор Вп срабатывает и замыкающие контакты Вп силовой цепи замыкаются, подключая обмотку статора к сети.
Одновременно замыкающий блок-контакт контактора Вп замыкается и цепь кнопки Вп шунтируется. Таким образом, кнопку Вп можно отпустить. Для останова двигателя необходимо нажать кнопку «Стоп».
При этом снимается напряжение с обмотки контактора Вп, в результате чего размыкаются его главные контакты и со статорных обмоток двигателя снимается напряжение. Одновременно размыкаются блок-контакты Вп, шунтирующие кнопку Вп. Так же работает схема и при пуске двигателя «назад» после нажатия кнопки Нз, с той лишь разницей, что срабатывает контактор Нз и последовательность подключения фаз статора становится обратной. Это приводит к изменению направления вращения ротора двигателя. Размыкающие контакты кнопки Вп 1, 2 и кнопки Нз 5, 6 размыкаются раньше, чем соответствующие замыкающие контакты 3, 4 и 7, 8. Это обеспечивает их взаимную блокировку и не позволяет подавать напряжение на обмотки контакторов Вп и Нз одновременно.
Схема автоматического пуска асинхронного двигателя с контактными кольцами. Рассмотрим работу схемы рис. 5.
Обмотки статора двигателя присоединены к сети через замыкающие контакты линейного контактора ЛК. К обмоткам ротора подключены три одинаковых резистора, соединенных звездой.
Схема управления пуском состоит из реле ускорения 1У и 2У, токовых реле ускорения 1РТ и 2РТ и реле времени РВ.
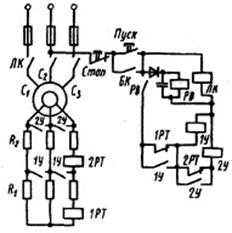
Рис. 5 Схема автоматического пуска асинхронного двигателя с контактными кольцами
При нажатии на кнопку «Пуск» к контактору ЛК подводится напряжение сети, контактор срабатывает, его главные контакты ЛК и блок-контакты БК замыкаются. В результате к обмоткам статора подводится напряжение, а кнопка «Пуск» оказывает заблокированной. В фазных обмотках ротора двигателя возникают ЭДС и ток, а ротор начинает вращаться.
Под действием тока ротора, проходящего через сопротивление и обмотки реле 1РТ и 1РТ, эти реле срабатывают и размыкают свои контакты 1РТ и 1РТ. Одновременно с подачей напряжения на статор двигателя подается питание на обмотку реле времени РВ, которое замыкает свои контакты спустя некоторое время после размыкания контакторов 1РТ и 2РТ, готовя цепь для подключения обмоток реле ускорения 1У и 2У.
По мере увеличения частоты вращения ротора его фазный ток уменьшается и достигает тока отпускания реле 1РТ, которое замыкает свои контакты, и к обмотке реле подводится напряжение.
Реле срабатывает и замыкает свои главные контакты, шунтирующие сопротивления.
В результате ток в роторе увеличивается скачком и реле 2РТ продолжает удерживать свои контакты в разомкнутом состоянии. Блок-контакты блокируют цепь контактов реле 1РТ.
Частота вращения ротора продолжает нарастать и ток в роторе уменьшается, достигая тока отпускания реле 2РТ.
Контакты реле 2РТ замыкаются и на обмотку реле 2У подается напряжение. Последнее срабатывает, замыкая свои контакты 2У, которые шунтируют резисторы.
Блок-контакты 2У замыкаются, блокируя контакты реле 2РТ. Рассмотренная последовательность работы схемы обеспечивает плавный разгон двигателя.
ЛИТЕРАТУРА
Основная
1. Касаткин В.С., Немцов М.В., Электротехника. - М.; Энергоатомиздат, 2000.
2. Основы промышленной электроники /Под ред. В.Г. Герасимова.- М.: Высшая школа, 1985.
3. Основы теории цепей; Учебник для ВУЗов. /В.П. Бакалов и др. 2-ое изд. перераб. и доп. – М.; 2000.
4. Сборник задач по электротехнике и основам электроники /Под ред. В.Г. Герасимова.- М.: Высшая школа, 1987.
5. Прянишников В.А. Электроника. - СПб; Корона принт, 2002.
6. Хоровиц П., Хилл У. Искусство схемотехники.- М.: Мир, 1997.
7. Амочаева Г.Г. Электронный конспект лекций.
Дополнительная
1. Алексеенко А.Г., Шагурин Н.И. Микросхемотехника. Учебное пособие для вузов.- М.: Радио и связь, 1990.
2. Жеребцов И.П. Основы электроники.- Л.: Энергоатомиздат, 1990.
3. Попов В.П., Основы теории цепей.- Учебник для ВУЗов.- 3-е изд. испр.-М.: Высшая школа, 2000.
4. Электротехника и электроника в экспериментах и упражнениях: Практикум на Electronics Workbench. в 2-х томах, Под ред. Д.И. Панфилова ДОДЭКА, 1999.-т.1-Электроника.
5. Электротехника/Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. Учебник для вузов.- 2-е изд., перераб. и доп.- М.: Энергоатомиздат, 1985.
Рекомендуемые страницы:
Воспользуйтесь поиском по сайту:
megalektsii.ru
Релейно-контакторная система - Большая Энциклопедия Нефти и Газа, статья, страница 1
Релейно-контакторная система
Cтраница 1
Теперь релейно-контакторные системы применяются в относительно простых приводах для выполнения несложных операций. [1]
Релейно-контакторные системы управления, несмотря на их широкое распространение, обладают существенными недостатками, обусловленными в первую очередь тем, что аппараты управления имеют движущиеся части и подвижные замыкающие и размыкающие контакты. Контакты и подвижные части довольно быстро изнашиваются, что приводит к нарушению соединения между контактами и выходу из строя некоторых аппаратов и всей схемы управления. Вероятность нарушения контактов становится весьма существенной и работа системы - ненадежной. [2]
Разработанные и внедренные релейно-контакторные системы были доведены до высокой степени автоматизации, например система загрузки доменной печи, когда скипы с рудой, коксом и флюсами автоматически доставляются к печи, в соответствии с заданной программой разгружаются в печь, автоматически измеряется уровень шихты в печи и выполняются другие операции, В большинстве приводов, даже при ручном управлении, ряд операций выполняется автоматически. [3]
В первой главе изложены примеры релейно-контакторных систем электропривода. Вторая глава посвящена изучению способов формирования процессов пуска и торможения в замкнутых системах электропривода; третья - способов поддержания заданного значения скорости. [4]
Хронологически первыми автоматизированными устройствами управления электроприводами появились релейно-контакторные системы, в которых используют в качестве основных аппаратов контакторы реле, командные аппараты и другие контактные устройства, позволяющие осуществить автоматический или дистанционный пуск двигателя, ускорение, изменение скорости, остановку, реверс, торможение, блокировочные связи с другими механизмами. [5]
Примером систем формально логического действия могут являться релейно-контакторные системы управления. Примером их могут служить многие САУ, в том числе самонастраивающиеся системы, рассматриваемые ниже. [6]
Повышение надежности комплектных устройств управления осуществляется как за счет замены релейно-контакторных систем управления бесконтактными, так и за счет электрической разгрузки аппаратов и изменения нагружения привода. Важнейшим путем повышения системной надежности буровых электроприводов является применение новых технических решений. [7]
Вопросу изучения показателей надежности бурового электрооборудования посвящено множество работ, однако проводившиеся исследования касались электрооборудования серийных буровых установок, где в качестве приводов основных механизмов использованы двигатели переменного тока с релейно-контакторной системой управления. [8]
Эти системы построены на основе созданных на микропроцессорной элементной базе устройств, совместимых по интерфейсу и протоколу с устройствами ввода-вывода УВК. Конвейеры оборудованы релейно-контакторными системами управления электроприводом секций и датчиками состояния и положения секций. Контроль и управление движением товарных единиц осуществляются УВК, в который поступают все сигналы от датчиков и вырабатываются управляющие сигналы к релейно-контакторным системам. [9]
В период разгона не требуется большой точности в отношении величины пройденного пути подъемным сосудом и времени разгона. Поэтому период разгона легко автоматизируется с помощью обычной релейно-контакторной системы в функции времени с дополнительной корректировкой по, току. [11]
Кроме того, электроприводы кранов и других подъемно-транспортных механизмов, имеющие двигатели с фазным ротором, снабжаются устройствами, обеспечивающими автоматический контроль за режимом пуска электродвигателей, во избежание возможности разгона электродвигателей без задержки на промежуточных положениях контроллера или командоконтроллера. Управление электродвигателями подъемно-транспортных машин осуществляется при помощи контроллеров, магнитных пускателей, контакторов или релейно-контакторных систем. [12]
Управление такими электроприводами осуществляется релейно-контакторной аппаратурой. Релейно-контакторные системы управления ( РКСУ) осуществляют автоматические пуск, торможение, реверсирование и останов двигателей. Более 90 % всех установленных электроприводов управляются сегодня по схемам РКСУ. Электропромышленность поставляет ре-лейно-контакторные схемы в виде законченных изделий - станций управления, предназначенных для оснащения электроприводов постоянного тока ( с двигателями независимого и последовательного возбуждения), асинхронных ( коротко-замкнутых и с фазным ротором) и роторных цепей синхронных двигателей. На этих станциях управления собраны типовые схемы, с помощью которых осуществляется управление движением электропривода, а также необходимые защиты. [13]
Применение усилителей позволяет отказаться от использования тяжелых контакторов в главных цепях, требующих постоянного наблюдения, что существенно облегчает эксплуатацию, значительно снижает потери энергии в обмотках коммутирующих аппаратов и в резисторах главных и управляющих цепей. Подобные системы позволяют более качественно управлять процессами: в них. Эти причины обусловили переход в мощных и регулируемых приводах от громоздких релейно-контакторных систем с большими, трудно коммутируемыми токами к автоматическим системам с управлением при помощи усилителей. Такие системы используются для автоматического регулирования скорости, напряжения, тока и других параметров приводов, для получения требуемых характеристик, в следящих системах и для выполнения ряда других функций. Теперь они вытесняются тиристорными приводами и потому имеют ограниченное применение. [15]
Страницы: 1 2
www.ngpedia.ru
Раздел II. Системы управления электроприводами
Глава 13. Релейно-контакторное управление электроприводами
Электроприводы с питанием электродвигателей непосредственно от сети, работающие в разомкнутых системах регулирования, широко распространены во всех отраслях промышленного производства. Преимущественно это асинхронные электроприводы с двигателями с короткозамкнутым или фазным ротором. В таких системах применяют контактные или бесконтактные переключающие электрические аппараты релейного действия. Для включения и отключения силовых цепей используются электромагнитные контакторы или тиристорные коммутаторы. Контакторы обычно имеют дугогасительную систему, которая гарантирует эффективное отключение больших токов в цепях, содержащих значительные индуктивности.
Логические функции управления электроприводом в соответствии с технологическим процессом реализуются с помощью электромагнитных и других типов реле, контакты которых имеют ограниченную коммутационную способность, составляющую обычно не более 5А. В современных системах электроприводов с дискретным управлением часто логические функции реализуются на программируемых контроллерах с выходом на катушки контакторов.
13.1. Защита в системах электропривода Защиты асинхронных электроприводов
В асинхронных электроприводах с релейно-контакторным управлением применяются следующие виды защит.
Нулевая защита – это защита, отключающая электропривод при недопустимом снижении питающего напряжения и последующем его восстановлении, чтобы исключить аварийные технологические ситуации и травмы обслуживающего персонала.
Максимально-токовая защита от коротких замыканий отключает электропривод при коротких замыканиях в силовых цепях и цепях управления. Она предотвращает развитие аварии в повреждённом участке схемы и защищает питающую электропривод линию.
Максимально-токовая защита от кратковременных перегрузок, действующая на отключение, применяется в асинхронных электроприводах с двигателем с фазовым ротором. Она защищает щёточный узел ротора от работы с кратковременными недопустимо большими токами. Ток срабатывания этой защиты обычно принимается равным 2,53,0Iн. Максимальные пусковые токи должны быть ниже тока срабатывания этой защиты.
Тепловая защита действует на отключение и защищает электродвигателей от недопустимого перегрева его обмоток при перегрузках за счёт нарушения технологического процесса или при работе двигателя на двух фазах.
Защиты синхронных электроприводов
В синхронных электроприводах применяют следующие виды защит. Максимально-токовая защита от коротких замыканий в силовой цепи. Нулевая защита, если по технологии работы отдельно не оговаривается режим самозапуска при кратковременном исчезновении питающего напряжения. Минимально-токовая защита в цепи обмотки возбуждения, защищающая синхронный двигатель от продолжительной работы в асинхронном режиме. Защита от затянувшегося пуска, реализуемая с помощью реле времени пуска. Выдержка времени этого реле выбирается исходя из паспортных данных двигателя, где оговаривается максимальное время, в течении которого синхронный двигатель может работать в асинхронном режиме, по условиям нагрева пусковой обмотки до максимально допустимой температуры. Если двигатель за отведённое время не вышел на рабочую характеристику синхронного режима, то пуск должен быть прекращён, а двигатель отключён от питающей сети.
studfiles.net
Тема 1.6 Релейно-контакторные системы управления — КиберПедия
Основные операции управления тяговыми электродвигателями. Назначение основных узлов электрической принципиальной схемы управления подвижным составом с косвенной системой управления.
Практическая работа №1 (2 часа)
Изучение работы электрической схемы троллейбуса модели АКСМ-101.
Литература: [1] с. 4-9, с.67-73, [2] с.3-10.
Методические указания
Изменение режима работы тягового электропривода на подвижном составе обеспечивается системой управления, которая осуществляет:
1) Подключение тягового двигателя к контактной сети при пуске.
2) Плавное или ступенчатое регулирование напряжения подводимого к тяговому двигателю.
3) Плавное или ступенчатое возбуждение тягового двигателя.
4) Переключение двигателя на режим электрического торможения.
5) Переключение с одного вида торможения на другой (например, с рекуперативного на реостатное, с реостатного на механическое).
6) Выключение тягового двигателя – переход на выбег с режима тяги или торможения.
7) Реверсирование направления вращения двигателей для изменения направления подвижного состава.
8) Отключение двигателей или их части при аварийных режимах.
Ступенчатое регулирование напряжения на тяговом двигателе осуществляется как изменением ступеней реостатов в цепи двигателей, так и перегруппировкой их с последовательного на параллельное соединение. Последнее может выполняться на подвижных составах с несколькими двигателями. На подвижных составах троллейбусов и трамваев перегруппировка двигателей осуществляется редко, т.к. эта операция существенно усложняет систему управления и не является обязательной для выполнения основных режимов работы подвижного состава.
Система управления двигателей в зависимости от способа регулирования напряжения разделяется на
- реостатные
- безреостатные
в зависимости от вида регулирования устройств на
- ступенчатые
- плавные
в зависимости от способа управления электрическими аппаратами на
- систему непосредственного управления
- систему косвенного или дистанционного управления
по принципу управления на
- автоматические
- неавтоматические
Реостатные системы управления в режиме пуска обеспечивают регулирование напряжения двигателя, изменением сопротивления пускового реостата, включенного последовательно с двигателем.
Безреостатные системы управления (тиристорно-импульсные) обеспечивают регулирование напряжения двигателя подачей на него импульсов напряжения постоянной амплитуды, ширина и частота которой может изменяться по требуемому закону.
В ступенчатых системах управления изменение среднего напряжения на двигателях происходит ступенями, причем так, чтобы ток на тяговом двигателе менялся в заданных пределах, от некоторого наименьшего значения до большего.
В плавных или бесступенчатых системах изменение среднего напряжения на двигателях происходит плавно. В таких системах ток и сила тяги в пределах регулируемого напряжения поддерживается практически постоянными.
Система в процессе которой все операции тягового двигателя выполняются одним аппаратом – контроллером, приводимое в действие непосредственно водителем называется системой непосредственного управления, а контроллер – силовым контроллером. Контроллер непосредственного управления обычно имеет 2 вала и управляется двумя рукоятками: главной и реверсивной. С помощью главной рукоятки выполняются все основные операции управления: включение/выключение тягового двигателя; постепенное выведение пуска тормозных реостатов; перегруппировка ТЭД; ослабление возбуждения двигателя; переключение электрической схемы с тягового режима на тормозной т обратно. С помощью реверсивной рукоятки изменяют направление движения вагонов; отключают повреждённую группу ТЭД и собирают схемы аварийного режима, также запирают контроллер.
Система управления, при которой все необходимые переключения осуществляются специальными аппаратами, индивидуальными или групповыми контакторами, управляемые с помощью контроллеров управления называется системой косвенного управления. При косвенном управлении водитель управляет аппаратами силовой цепи на расстоянии, с помощью контроллеров управления. В этом случае процесс управления значительно облегчается, т.к. для приведения в действие контроллера управления требуется значительно меньшее усилие по сравнению с силовым контроллером непосредственного управления. Косвенные системы управления позволяют создавать электрические схемы с более сложной функциональной взаимосвязью электрических аппаратов, осуществлять автоматическую защиту электрооборудования, а также заменять сложные механические блокировочные устройства, более простыми – электрическими. Эти системы проще поддаются автоматизации.
Системы косвенного управления с индивидуальными контакторами получили широкое распространение на троллейбусах. К косвенным групповым системам управления относятся такие системы, в которых выведение ступеней пуска тормозных реостатов, регулирование возбуждения, а иногда и перегруппировка двигателей выполняется групповым аппаратом – реостатным контроллером.
В случае использования групповых и индивидуальных аппаратов косвенная система называется смешанной. На ЭПС ГЭТ групповые системы применяются преимущественно при автоматическом управлении.
Реостатно-контакторное управление в настоящее время применяют весьма широко для регулирования частоты вращения двигателей малой и средней мощностей, а иногда и для регулирования мощных двигателей (на железнодорожном транспорте).
Обычно при реостатно-контакторном управлении используют два метода регулирования: 1) при частотах вращения, меньших номинальной, в цепь якоря включают реостат; 2) при повышенных частотах вращения регулируют ток возбуждения; Машины малой мощности при отсутствии автоматизированного управления имеют два регулировочных реостата с ручным приводом, один из которых включен в цепь якоря, а другой — в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса, значения их сопротивлений изменяют ступенчато с помощью контакторов. Если требуется точное регулирование, то число контакторов должно быть очень большим, при этом вся установка становится громоздкой, дорогой и сравнительно малонадежной.
В двигателях с параллельным возбуждением реостатно-контакторное управление позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения; в зоне низких частот вращения применяют динамическое торможение, причем регулирований тормозного усилия осуществляют с помощью того же реостатно-контакторного устройства, которое используют для регулирования двигательного режима (после соответствующего переключения схемы).
В связи со сложностью автоматизации и большими расходами, идущими на ремонт и эксплуатацию, реостатно-контакторное управление постепенно заменяют более совершенными методами.
Вопросы для самоконтроля:
1 Расскажите о реостатных и безреостатных системах управления.
2 Расскажите о ступенчатых и плавных системах управления.
3 Расскажите о системе непосредственного управления.
4 Расскажите о системе косвенного или дистанционного управления.
Тема 1.7 Принципиальная электрическая схема силовой цепи, цепей управления и таблица включения контакторов трамвая модели РВЗ-6
Технические характеристики и структура электрической принципиальной схемы силовой цепи трамвайного вагона РВЗ-6, особенности электрической принципиальной схемы.
Основные структурные элементы принципиальной схемы. Контроллер управления. Реверс тяговых двигателей. Дополнительные элементы принципиальной схемы.
Практическая работа №2 (2 часа)
Изучение работы электрической схемы трамвайного вагона КТМ-5 при пуске.
Практическая работа №3 (2 часа)
Изучение работы электрической схемы трамвайного вагона КТМ-5 при торможении.
Литература: [1] с. 163-171, [2] с.11-17.
Методические указания
Вагон типа РВЗ-6 получает электрическую энергию от контактной сети напряжением 600 В посредством токоприёмника бугельного типа. Вторым проводником в цепи «тяговая подстанция - трамвайный вагон» является рельсовый путь. Для подавления искрения, создающего помехи радиоприёму, РВЗ-6 оснащался радиореактором (катушкой индуктивности), который устанавливался на крыше вагона над первой тележкой.
Электрическая часть вагона РВЗ-6 включала в себя тяговые двигатели, пускотормозные сопротивления, автоматический групповой реостатный контроллер для коммутации силовых электрических цепей вагона. При трогании с места пускотормозные сопротивления включались последовательно с двигателями, а по мере набора скорости они начинали ступенчато выводиться реостатным контроллером; после выхода двигателей на автоматическую характеристику при полном возбуждении, с целью дальнейшего увеличения скорости вагона, реостатный контроллер уменьшал степень возбуждения тяговых двигателей, посредством ввода сопротивлений в цепь их шунтовых обмоток. При необходимости снижения скорости индивидуальные силовые контакторы формировали отключённую от контактной сети замкнутую цепь из тяговых двигателей (работающих в режиме генератора электроэнергии) и включённых в качестве нагрузки тормозных сопротивлений. Возникающий в этой цепи ток создаёт внутри обмоток индуктора и якоря тяговых двигателей противонаправленные магнитные потоки, приводящие к возникновению механического момента силы, стремящегося остановить вращение якоря. Таким образом, реализуется электродинамическое торможение вагона.
Вспомогательное электрооборудование включает в себя следующие узлы и цепи:
- аккумуляторную батарею для автономного питания ряда устройств;
- цепи управления групповым реостатным контроллером;
- цепи наружного и внутреннего освещения;
- цепи обогрева пассажирского салона и кабины водителя;
- цепи принудительной вентиляции пускотормозных сопротивлений;
- цепи электромотора компрессора и регулятора давления в системе;
- цепи световой и звонковой сигнализации;
- систему оповещения с микрофоном и усилителем, находящимися в кабине и громкоговорителями, установленным в пассажирском салоне.
Хотя многие потребители в этом списке являются низковольтными, РВЗ-6 не имел отдельной гальванически развязанной с контактной сетью электрической подсистемы. Вместо этого ряд высоковольтных потребителей электроэнергии и аккумуляторная батарея подсоединялись между собой таким образом, чтобы между определёнными двумя точками этого комплекса узлов и агрегатов формировалась разность потенциалов в 48 В. Низковольтные потребители, рассчитанные на это напряжение, получали электроэнергию путём параллельного подключения к этим двум точкам.
Модификация РВЗ-6М2 оснащалась также оборудованием, позволяющим отключить местное управление групповым контроллером второго вагона в составе поезда по системе многих единиц и перевести его на ведущий вагон. Также РВЗ-6М2 оснащался дополнительной чисто электрической (в отличие от магистральных железных дорог и трамваев раннего периода) схемой для автоматического экстренного торможения вагонов поезда в случае его разрыва.
Вопросы для самоконтроля:
1 Расскажите о технических характеристиках схемы вагона РВЗ-6.
2 Расскажите структуру электрической принципиальной схемы силовой цепи вагона РВЗ-6.
3 Назовите особенности схемы вагона.
4 Назовите назначение контроллера управления на вагоне РВЗ-6.
5 Объясните реверс тяговых двигателей на вагоне РВЗ-6.
6 Назовите дополнительные элементы принципиальной схемы вагона.
cyberpedia.su
§13.4. Релейно-контакторное управление электродвигателями
Назначение релейно-контакторногоуправления.
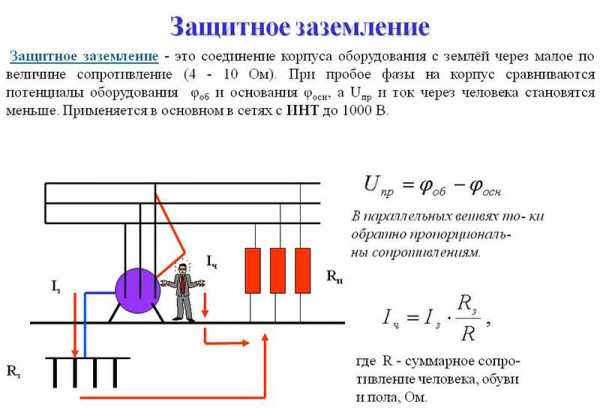
Релейно-контакторноеуправление позволяет осуществить автоматический, дистанционный пуск, изменение частоты вращения, останов, реверсирование, торможение и защиту двигателя. Этот вид управления относится к разомкнутым системам в том смысле, что он не охвачен обратными связями. В результате этого возмущающее воздействие(например, изменение нагрузки на валу двигателя) изменяет заданный режим, т. е. приводит к изменению частоты вращения вала двигателя. Для сложных приводов применяют замкнутые системы, т. е. системы автоматического регулирования, охваченные обратными связями. В таких системах поддерживается заданный режим работы при наличии возмущающих воздействий(изменение нагрузки, напряжения питания и т. д.).
Изображение схем релейно-контакторногоуправления.
Схемы релейно-контакторногоуправления вычерчивают как совмещенные или как элементные(развернутые). В совмещенных схемах все элементы аппарата размещают на чертеже так, как они расположены в натуре. Монтажные схемы вычерчивают как совмещенные. Совмещенные схемы громоздки и сложны для чтения. При проектировании электропривода используют развернутые схемы, облегчающие понимание работы установки. На развернутой схеме элементы силовой цепи и управления показаны разнесенными, так же как контакты и обмотки реле. При этом контакты аппаратов изображают в положении, которое соответствует обесточенному состоянию обмоток. В соответствии с этим все контакты делят на нормально открытые, или замыкающие(3), и нормально закрытые, или размыкающие(Р). Когда катушка обесточена, цепь замыкающих контактов разомкнута, а цепь размыкающих контактов замкнута.
Схема управления и защиты асинхронного двигателя с помощью реверсивного магнитного пускателя.
Магнитный пускатель состоит из одного или двух контакторов, смонтированных на общем основании и помещенных в металлический корпус. Пускатели, как правило, снабжают встроенным тепловым реле. Магнитный пускатель с одним контактором называют нереверсивным. С его помощью осуществляют пуск, останов, защиту электродвигателя от самопроизвольных включений и перегрузок. Магнитный пускатель с двумя контакторами называют реверсивным; он помимо перечисленных функций обеспечивает реверсирование двигателя.
Рис 13.8. Схема реверсивного магнитного пускателя
Рассмотрим работу реверсивного магнитного пускателя (рис. 13.8). Пускатель содержит два контактора: один для пуска«вперед» (Вп), другой— для пуска«назад» (Нз). Защита двигателя от токов короткого замыкания осуществляется тремя плавкими предохранителями, а от перегрузок
— двумя тепловыми реле: 1РТ и2РТ. Обмотки статора двигателя подключают к сети через плавкие предохранители, рабочие контактыВп илиНз контакторов и нагревательные элементы тепловых реле1РТ и2РТ (для двух фаз). Работа схемы при пуске«вперед» происходит так. При нажатии кнопкиВп замыкаются контакты3, 4 и к обмотке контактораВп подводится напряжение от зажимов сетиЛ1—Л3. КонтакторВп срабатывает и замыкающие контактыВп силовой цепи

замыкаются, подключая обмотку статора к сети. Одновременно замыкающийблок-контактконтактораВп замыкается и цепь кнопкиВп шунтируется. Таким образом, кнопкуВп можно отпустить. Для останова двигателя необходимо нажать кнопку«Стоп». При этом снимается напряжение с обмотки контактораВп, в результате чего размыкаются его главные контакты и со статорных обмоток двигателя снимается напряжение. Одновременно размыкаютсяблок-контактыВп, шунтирующие кнопкуВп. Так же работает схема и при пуске двигателя«назад» после нажатия кнопкиНз, с той лишь разницей, что срабатывает контакторНз и последовательность подключения фаз статора становится обратной. Это приводит к изменению направления вращения ротора двигателя. Размыкающие контакты кнопкиВп 1, 2 и кнопкиНз 5, 6 размыкаются раньше, чем соответствующие замыкающие контакты3, 4 и7, 8. Это обеспечивает их взаимную блокировку и не позволяет подавать напряжение на обмотки контакторовВп иНз одновременно.
Карточка №13.4 (254)
Схема управления и защиты асинхронного двигателя с помощью реверсивного магнитного пускателя
Какая последовательность фаз обеспечивается | нажатием | Л3—Л2—Л1 |
| 33 | |
кнопки Нз в схеме рис. 13.8? |
|
|
|
|
|
| Л1—Л2—Л3 |
| 50 | ||
|
|
| |||
|
| Л2—Л3—Л1 |
| 40 | |
Что произошло бы при одновременном нажатии кнопок Вп и | Выход из строя двигателя | 11 | |||
Нз при отсутствии взаимной блокировки? |
| Срабатывание тепловых реле | 21 | ||
|
|
|
| ||
|
| Перегорание плавких вставок | 60 | ||
|
| предохранителей |
|
| |
Как включены обмотки контакторов Вп иНз? |
| Последовательно |
| 5 | |
|
|
|
|
| |
|
| Параллельно |
| 58 | |
|
|
|
| ||
К какой категории контакторов относятся блок-контактыВп и | Замыкающих |
| 32 | ||
Нз? |
|
|
|
| |
| Размыкающих |
| 30 | ||
|
|
|
|
| |
В каком случае реверсирование двигателя | произойдет | В случае а) |
| 16 | |
быстрее: а) сначала нажимается кнопка«Стоп», а затемНз; б) |
|
|
| ||
В случае б) |
| 71 | |||
сразу нажимается кнопка Нз? |
|
|
|
|
|
| Время | реверсирования в | 20 | ||
|
| ||||
|
| обоих | случаях | будет |
|
|
| одинаковым |
|
| |
|
|
|
|
|
|
Схема автоматического пуска асинхронного двигателя с контактными кольцами.
Рассмотрим работу схемы рис. 13.9. Обмотки статора двигателя присоединены к сети через замыкающие контакты линейного контактораЛК. К обмоткам ротора подключены три одинаковых резистора, соединенных звездой. Схема управления пуском состоит из реле ускорения1У и2У, токовых реле ускорения1РТ и2РТ и реле времениРВ.
Рис. 13.9. Схема автоматического пуска асинхронного
двигателя с контактными кольцами
При нажатии на кнопку «Пуск» к контакторуЛК подводится напряжение сети, контактор срабатывает, его главные контактыЛК иблок-контактыБК замыкаются. В результате к обмоткам статора подводится напряжение, а кнопка«Пуск» оказывает заблокированной. В фазных обмотках ротора двигателя возникают ЭДС и ток, а ротор начинает вращаться. Под действием тока ротора, проходящего через сопротивлениеR1+R2 и обмотки реле1РТ и1РТ, эти реле срабатывают и размыкают свои контакты1РТ и1РТ. Одновременно с подачей напряжения на статор двигателя подается питание на обмотку реле времениРВ, которое замыкает свои контакты спустя некоторое время после размыкания контакторов1РТ и2РТ, готовя цепь для подключения обмоток реле ускорения1У и2У. По мере увеличения частоты вращения ротора его фазный ток уменьшается и достигает тока отпускания реле1PT, которое замыкает свои контакты, и к обмотке реле1У подводится напряжение. Реле1У срабатывает и замыкает свои главные контакты1У, шунтирующие сопротивления. В результате ток в роторе увеличивается скачком и реле2РТ продолжает удерживать свои контакты в разомкнутом состоянии. Блок-контакты1У блокируют цепь контактов реле1РТ. Частота вращения ротора продолжает нарастать и ток в роторе уменьшается, достигая тока отпускания реле2РТ. Контакты реле2РТ замыкаются и на обмотку реле2У подается напряжение. Последнее срабатывает, замыкая свои контакты2У, которые шунтируют резисторыR2. Блок-контакты2У замыкаются, блокируя контакты реле2РТ.
Рассмотренная последовательность работы схемы обеспечивает плавный разгон двигателя.
Карточка № 13.5 (211).
Схема автоматического пуска асинхронного двигателя с контактными кольцами
Какая из приведенных кривых | соответствует | Кривая 2 |
|
|
| 37 | |
пуску двигателя с пусковыми сопротивлениями? |
|
|
|
|
| ||
Кривая 1 |
|
|
| 13 | |||
|
|
|
|
|
| ||
Какое соотношение должно быть между временем | tPB>t1PB |
|
|
| 10 | ||
срабатывания реле РВ tPB | и | временем |
|
|
|
|
|
tPB<t1PB |
|
|
| 36 | |||
срабатывания реле 1РТt1PB? |
|
|
|
|
|
|
|
|
| tPB=t1PB |
|
|
| 8 | |
|
|
|
|
|
| ||
|
|
|
|
| |||
Что произойдет, если реле времени | сработает | Двигатель выйдет из строя |
| 2 | |||
раньше, чем разомкнутся контакты реле1РТ? |
|
| |||||
Сгорят плавкие вставки предохранителя | 35 | ||||||
|
|
|
|
|
|
|
|
|
|
| Произойдет | пуск | двигателя | без | 66 |
|
|
| подключения пусковых резисторов |
|
| ||
|
|
|
|
|
| ||
Каким должно быть соотношение между токами | Iотп1> Iотп2 |
|
|
| 55 | ||
отпускания реле 1РТ и2РТ? |
|
|
|
|
|
|
|
|
| Iотп1<Iотп2 |
|
|
| 46 | |
|
|
| Iотп1=Iотп2 |
|
|
| 28 |
|
|
|
|
|
| ||
Что произойдет, если соотношение между токами | Произойдет | пуск | двигателя | без | 48 | ||
отпускания реле 1РТ и2РТ будет неправильным? | подключения пусковых резисторов |
|
| ||||
|
|
|
|
|
| ||
|
|
| Двигатель выйдет из строя |
| 17 | ||
|
|
| Пуск двигателя будет не двух-, | а | 43 | ||
|
|
| одноступенчатым |
|
|
| |
ЭЛЕКТРОНИКА ГЛАВА 14 ЭЛЕКТРОННЫЕ ЛАМПЫ
§14.1. Общие сведения
Электронные лампы входят в группу приборов, которые называются электровакуумными. Электровакуумные приборы— это электронные приборы, в которых проводимость
осуществляется посредством электронов или ионов, движущихся между электродами через вакуум или газ.
Электровакуумные приборы подразделяют на электронные и ионные. В электронных приборах, к которым относятся электронные лампы, прохождение электрического тока осуществляется только за счет свободных электронов, в ионных— как за счет свободных электронов, так и за счет ионов.
Электронные лампы применяют в выпрямительных, усилительных и генераторных устройствах, а также в автоматике, вычислительной и измерительной технике. В настоящее время
масштабы применения электронных ламп ограничены в связи с бурным развитием полупроводниковой техники и особенно микроэлектроники. Однако при больших частотах и мощностях электронные лампы еще находят широкое применение.
Во всех электронных лампах источником свободных электронов является специальный электрод, называемый катодом. Катод испускает электроны за счет явления электронной эмиссии.
§ 14.2. Электронная эмиссия
Металлы характеризуются наличием большого количества свободных электронов, которые беспорядочно перемещаются в междуатомном пространстве. При обычных условиях только отдельные электроны выходят из металла, преодолевая притягивающее действие его положительно заряженных ионов. В результате на поверхности металла формируется двойной электрический слой(рис. 14.1). Этот слой образует электрическое поле, препятствующее дальнейшему выходу электронов из металла. Разность потенциалов в этом поле между электрическими слоями называют потенциальным барьером.
Рис. 14.1. Двойной электрический слой на поверхности
металла
Для преодоления этого барьера электроны металла должны получить извне определенную энергию, равную работе, которую надо совершить, чтобы преодолеть потенциальный барьер. Эта работа называется работой выхода и обозначаетсяWa. Отношение работы выхода к заряду электрона называется потенциалом выхода ϕa=Wa/q0.
Существуют различные способы сообщения дополнительной энергии электронам металла и в зависимости от этого различные виды электронной эмиссии. Остановимся на двух: термоэлектронной и вторичной.
Термоэлектронной эмиссией называют явление испускания электронов нагретым металлом (катодом). При нагревании катода скорости хаотического движения электронов увеличиваются, что приводит к возрастанию их кинетической энергии. В результате число электронов, выходящих из металла, увеличивается. Эти электроны скапливаются около катода за счет притягивающего действия положительных ионов металла. Таким образом, вокруг катода образуется электронное облако, внутри которого электроны перемещаются в различных направлениях. При этом определенная часть их возвращается обратно на катод. С увеличением числа вышедших электронов плотность облака растет и дальнейший выход их затрудняется, а число возвращающихся на катод электронов увеличивается до тех пор, пока не наступит динамическое равновесие: число вышедших электронов окажется равным числу возвратившихся. Плотность электронного облака(объемного заряда) зависит от температуры катода. Если на электронное
studfiles.net
Описание работы типовых релейно-контакторных электрических схем управления электроприводами
7 Описание работы типовых релейно-контакторных электрических схем управления электроприводами
В современных системах управления электродвигателями широкое применение нашли схемы релейно-контакторного управления. Под релейно-контакторным управлением понимается управление электроприводами при помощи контакторов, магнитных пускателей, реле и других аппаратов. При этом рабочие контакты этих аппаратов, включенные в силовые (главные) цепи, приводятся в действие не вручную, а посредством вспомогательных электромагнитов, управление которыми может производиться дистанционно.
В связи с этим в схемах различают две цепи: цепь главного тока, или силовую, и цепь вспомогательную, или управления.
В силовую цепь входят обмотки машин переменного или постоянного тока, главные (силовые) контакты контакторов (магнитных пускателей), вводные рубильники или автоматические воздушные выключатели, предохранители и защитные реле.
В цепь управления входят кнопки управления, кнопочные посты, электромагниты контакторов (магнитных пускателей), путевые и конечные выключатели и переключатели, блокировочные и другие вспомогательные контакты реле и контакторов, а также регуляторы различных назначений.
Для повышения надёжности и безопасности эксплуатации цепи управления можно, а иногда и нужно, включать на пониженное напряжение через трансформаторы, используя для этого напряжение 36, 127 или 220 вольт, вместо рабочего напряжения 380 или 660 вольт.
В установках, где требуется повышенная надёжность или где требуется обеспечить высокую цикличность (подъёмно-транспортные механизмы, лифты), для цепей управления часто используют постоянный ток.
Силовые цепи замыкаются или размыкаются под действием цепи управления.
Схемы релейно-контакторного управления дают возможность осуществлять автоматический пуск и останов двигателя, изменение скорости его вращения, реверс, торможение, ускорение, блокировочные связи с другими механизмами и выполнять ряд других операций.
Релейно-контакторная схема может быть изображена на листе бумаги или в виде совмещённой схемы, или в виде развёрнутой (элементной).
В совмещённой схеме все элементы аппаратуры показываются на чертеже так, как они размещаются в действительности, и представляют собой, по существу, монтажные схемы.
В развёрнутой схеме токоведущие элементы аппаратов и машин изображаются в такой последовательности, которая нужна для выполнения ими соответствующих операций. Поэтому элементы одного и того же аппарата размещают в разных местах чертежа. Развёрнутую схему часто называют также принципиальной.
Следует сказать, что по развёрнутой схеме гораздо легче и проще проследить взаимодействие отдельных элементов, какой бы сложной и громоздкой эта схема не была.
В данном разделе приведено подробное описание типовых электрических принципиальных схем управления, применяемые на практике. Все схемы показаны в развёрнутом виде. В данных схемах для облегчения понимания принципа работы схемы на одном листе приводятся как главные (силовые) цепи, так и вспомогательные цепи управления.
О схемах управления, содержащих цепи автоматической блокировки и сигнализации, более подробно будет рассказано в разделе 7.6 именно с точки зрения интереса к специфике этих цепей.
7.1 Управление электроприводами с трёхфазными асинхронными двигателями с короткозамкнутым ротором
Трёхфазные асинхронные электродвигатели нашли широкое применение в качестве силовых электродвигателей благодаря тому, что они имеют ряд неоспоримых преимуществ, в сравнении с другими электродвигателями.
Такими преимуществами (достоинствами) являются: простота конструкции, удобство и надёжность в эксплуатации, экономичность, безопасность, дешевизна, большая шкала мощностей при всех скоростях вращения, возможность регулирования скорости вращения несколькими способами, хорошие механические характеристики и пусковые свойства, значительная перегрузочная способность.
7.1.1 Схемы дистанционного управления электроприводами
Схема управления (рисунок 7.1) обеспечивает дистанционное управление нереверсивным трёхфазным асинхронным электродвигателем с короткозамкнутым ротором (к.з.р.). Для включения двигателя требуется включить вводной автоматический выключатель QF1 и осуществить нажатие пусковой кнопки SB2. Таким образом будет подано напряжение питания на электромагнит управления контактора КМ1. Перемещение якоря электромагнита через механизм реле передаётся на контактную систему контактора. При этом замыкающие (нормально-разомкнутые) контакты контактора будут замыкаться как в силовой цепи (КМ1), так и в цепи управления (КМ1.1), а размыкающие (нормально-замкнутые) будут размыкаться). Блок-контакт КМ1.1 позволяет осуществить питание (самопитание) электромагнита после того как пусковая кнопка SB2 будет отпущена. Останов двигателя осуществляется нажатием кнопки SB1. Цепь управления электромагнита КМ1 теряет питание и за счёт усилия пружин возврата в механизме контактора возвращает механизм в первоначальное положение. При этом ранее замкнувшиеся замыкающие (нормально-разомкнутые) контакты контактора будут размыкаться, а ранее разомкнувшиеся размыкающие (нормально-замкнутые) будут замыкаться. Двигатель при этом отключается от сети и ротор двигателя вращается ещё какое-то время по инерции.
 А В С N QF1 SB1 SB2 KM1 KM1 KM1.1 М1
А В С N QF1 SB1 SB2 KM1 KM1 KM1.1 М1
vunivere.ru
Какая система управления краном лучше?
Мнение эксперт-менеджера С.Н.Теплова, начальника конструкторского бюро ООО "СКТБ ПТО им.Е.О.Патона"
Для начала поясню, какие бывают системы управления и в чем их особенности. Итак, самые распространенные системы управления: релейно-контакторная и частотная. Очень редко применяется – тиристорная система управления. В последнее время практически не применяется – дроссельная система управления.
На рисунке 1. Приведена диаграмма, поясняющая особенности работы каждой системы управления.
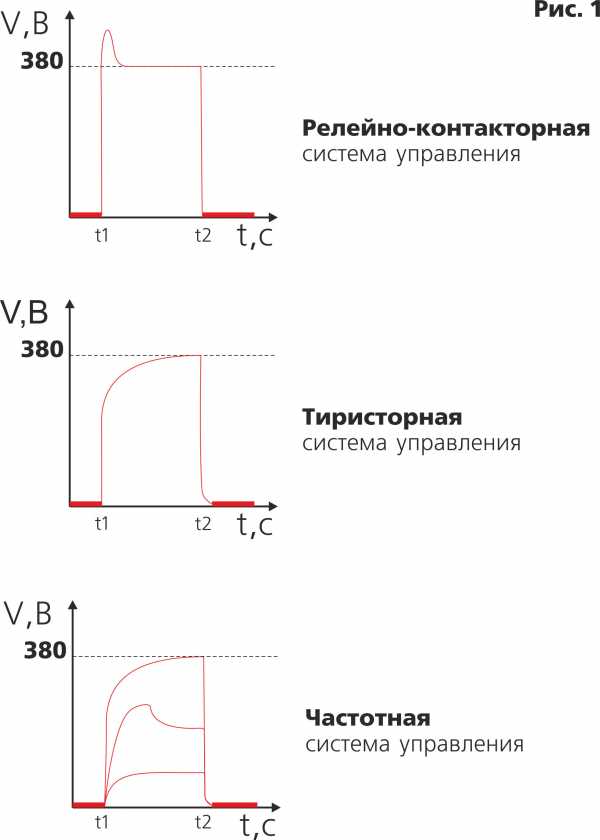
На диаграмме видно, что в момент подачи управляющего сигнала, момент торможения происходит также резко.
При тиристорной системе управления нет резкой передачи момента от механизма к механизму. В момент t1 электродвигатель плавно набирает обороты до номинальных значений. Торможение происходит плавно, без рывков.
При частотной системе управления разгон и торможение осуществляется так же плавно, как и при тиристорной системе управления. Преимущество частотной системы в том, что в процессе перемещения груза можно увеличивать и уменьшать скорость перемещения груза в пределах заданного диапазона регулирования.
Будем рассматривать и сравнивать два самых распространенных на настоящий момент способа регулирования скорости: релейно-контакторный и частотный.
Релейно-контакторная система управления появилась на рынке гораздо раньше частотной системы и несколько десятков лет была основной системой управления грузоподъемными механизмами. Релейно-контакторная система управления позволяет регулировать скорость как механизма подъема/опускания груза, так и механизма передвижения крана и передвижения тележки грузовой. Управление может быть как одноступенчатым (включил – и механизм рывком старается разогнаться до максимальной скорости), так и многоступенчатым (путем переключения многопозиционного переключателя, ступенями увеличиваем либо уменьшаем скорость подъема или перемещения).
Частотная система управления появилась на рынке заметно позднее. Основу частотной схемы управления составляет частотный преобразователь. Регулирование скорости происходит плавно, путем преобразования 3-х фазного тока частотой 50 Гц в трехфазный ток частотой 1 Гц – 87 Гц.
Преимущества частотной системы управления по сравнению с релейно-контакторной:
- Экономия электроэнергии (ориентировочно на 30 %).
- Снижение ударных нагрузок на механизмы, которыми управляет система управления (продление срока службы механизмов кинематической схемы ориентировочно на 50 %).Возможность регулирования скорости подъема/опускания и передвижения (точное позиционирование груза позволяет снизить время 1 цикла работы крана ориентировочно на 10 %).
- Возможность удаленной диагностики привода посредством промышленной сети, либо путем определения кода ошибки на табло частотного преобразователя или на экране промышленного монитора в кабине крановщика. Такая возможность позволяет моментально диагностировать часть неисправностей и незамедлительно приступить к устранению неисправности – минуя этап выявления неисправности (сокращение времени на устранение неисправностей ориентировочно на 10 %).
- Снижение акустического шума механизмов кинематической схемы (ориентировочно на 30 %).
- Возможность применения системы рекуперации электроэнергии - возврат в питающую сеть электрической энергии в момент торможения (дополнительно снижаются расходы на электроэнергию для питания крана ориентировочно на 15 %).Исключение «просадки» мощности питающей сети (в момент пуска электродвигателя, управляемого релейно-контакторной системой управления, в доли секунды возникают токи, превышающие номинальные в 6-8 раз, соответственно все электроприборы, подключенные в этот момент к электросети параллельно с краном, могут испытывать нехватку электроэнергии, что может приводитькнепреднамеренным выходам из строя либо к незапланированным остановкам некоторых процессов. Для исключения «просадки» мощности сеть питания подключают к специальным устройствам, называемым стабилизаторами напряжения).
Недостатки частотной системы управления по сравнению с релейно-контакторной: 1. Большинство моделей частотных преобразователей являются источником помех (это накладывает ряд ограничений на подбор оборудования, работающего в непосредственной близости от частотной системы управления). 2. Сравнительно высокая цена (в момент появления на рынке промышленных образцов частотных систем управления (построенных на базе частотных преобразователей) – они были на порядок дороже релейно-контакторных аналогов, но по мере развития технологий изготовления частотных преобразователей себестоимость изготовления последних снижалась. Если еще 2 года назад частотная система управления была дороже релейно-контакторной примерно на 100 % – 150 %, то уже в 2016 г. эта разница достигает ориентировочно 50%). 3. Старение конденсаторов главной цепи.
На основе вышеизложенных аргументов можно сделать вывод, что срок окупаемости частотной системы управления в настоящее время составляет 2-3 года (еще 3 года назад срок окупаемости составлял 5-6 лет из-за высокой стоимости частотных систем управления).
| 11 |  |
1 | В настоящий момент для организаций, эксплуатирующих грузоподъемные механизмы, частотная система управления является наиболее выгодной! |
www.uralkran.ru








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






