
Асинхронный Двигатель Переменного Тока: Подключение, Ремонт
Строение такого двигателя не отличается большой сложностью
Электрические моторы заняли в жизни человека почетное место и применяются в приборах различной мощности и габаритов. Встретить их можно повсеместно, начиная от электрических зубных щеток, стиральных машин микроволновых печей до беговых дорожек, промышленного оборудования или огромных автомобилях.
Причина популярности предельно ясна даже неспециалисту – простота устройства, легкость в обслуживании, рентабельность производства и многое другое, включая повсеместную электрификацию. Исключение, пожалуй, составляют автомобили, так как подать к ним ток по проводам нельзя, если это не троллейбус, но и то, в этом направлении сегодня ведется множество разработок.
Сегодня мы с вами поговорим о том, что представляет собой асинхронный двигатель переменного тока. Узнаем, как он устроен, и за счет каких принципов работает. Погнали!
Что такое асинхронный двигатель
Классический двигатель переменного тока асинхронный
Трехфазный асинхронный двигатель мало чем отличается от своих собратьев и состоит из двух основных частей – вращающейся и неподвижной, или другими словами ротора и статора.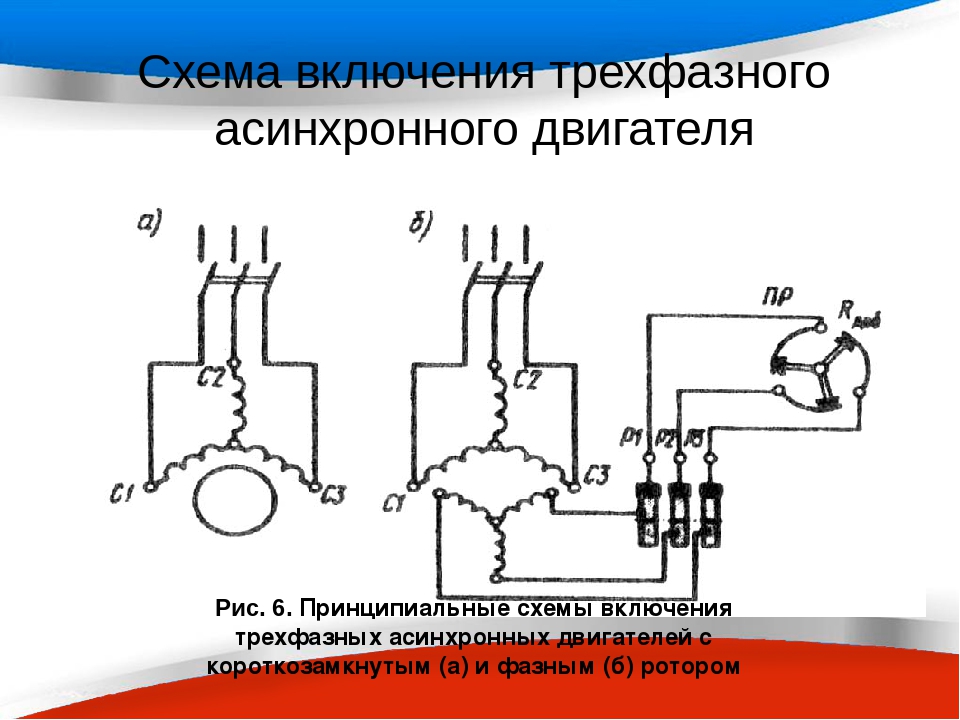 Располагаются они один в другом при этом, не касаясь друг друга. Между деталями имеется небольшой воздушный зазор от 0,5 до 2 миллиметров, в зависимости от конструкции двигателя.
Располагаются они один в другом при этом, не касаясь друг друга. Между деталями имеется небольшой воздушный зазор от 0,5 до 2 миллиметров, в зависимости от конструкции двигателя.
Схематическое строение
Однако это не все детали. Давайте разберем строение более подробно.
Схематическое строение трехфазного двигателя
- Статор – фактически главная рабочая часть, являющаяся мощным электромагнитом. Состоит он их сердечника, выполненного из тонколистовой технической стали, толщиной всего лишь 0,5 миллиметров, которая покрывается токоизоляционным лаком, и обмотки, сделанной из медной проволоки, которая также изолирована и располагается продольных пазах сердечника
Строение статора прекрасно видно на представленной выше схеме, где показано, что сердечник собран из множества пластин совмещенных друг с другом.
Цилиндр на валу снизу – это и есть ротор
- Ротор – данный элемент также состоит из сердечника, обмотка которого короткозамкнута (хотя бывает и другое строение), который располагается на валу.
 Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи.
Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи. - Вал мотора представляет собой центральную ось, вокруг которой и происходит вращение электромотора. С разных концов на этом элементе располагаются подшипники качения, за счет которых обороты происходят максимально плавно и легко. Сами подшипники запрессованы в боковые крышки, в которых имеются посадочные места под них.
 Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи.
Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи.Совет! Подшипники должны сидеть очень плотно, при этом они должны быть отцентрованы, смазаны, легко вращаться, то есть быть исправными, иначе при высоких оборотах двигатель очень быстро выйдет из строя.
Разбитая и новые крыльчатки
- На конце вала, противоположном приводу, располагается небольшая крыльчатка, которая при включенном двигателе выполняет функцию его охлаждения. Кстати, данный элемент тоже может стать причиной появления вибрации в двигателе, если его лопасти отломаются, что негативно сказывается на сроке службы агрегата. Пример разбитого вентилятора можно увидеть на фото выше.
- Идем по цепочке. Боковые крышки корпуса крепятся к станине, которая удерживает все вышеназванное вместе.
 Кстати, данный элемент тоже может стать причиной появления вибрации в двигателе, если его лопасти отломаются, что негативно сказывается на сроке службы агрегата. Пример разбитого вентилятора можно увидеть на фото выше.
Кстати, данный элемент тоже может стать причиной появления вибрации в двигателе, если его лопасти отломаются, что негативно сказывается на сроке службы агрегата. Пример разбитого вентилятора можно увидеть на фото выше.Также любой двигатель имеет пусковую аппаратуру и силовые цепи, о чем мы подробнее поговорим немного позже.
Принцип вращение электромагнитного поля
Электромагнитная индукция в моторах
Главной особенностью любого электрического двигателя является то, что он способен переводить электрическую энергию в кинетическую, то есть механическую. При этом, разобрав его строение, вы можете увидеть, что никакого прямого или передаточного привода он не имеет. Как же тогда происходит вращение двигателя?
Вся фишка в том, что обмотка статора способна создавать сильное вращающееся магнитное поле, которое увлекает за собой ротор, при включении мотора в электрическую сеть. Данное магнитное поле имеет определенную частоту вращения, которая прямопропорциональна частоте переменного тока, и имеет обратную пропорциональность числу пар полюсов обмотки.
Данное магнитное поле имеет определенную частоту вращения, которая прямопропорциональна частоте переменного тока, и имеет обратную пропорциональность числу пар полюсов обмотки.
То есть данную частоту можно вычислить по формуле: n1 = f1*60/p, где: n1 – частота вращения магнитного поля; f1 – частота переменного тока в Герцах; p – количество пар полюсов.
Строение асинхронного двигателя переменного тока
Пока ничего не понятно?
Ничего, сейчас во всем разберемся.
- Чтобы наглядно себе представить принцип вращения магнитного поля, давайте рассмотрим примитивную трехфазную обмотку, имеющую всего три витка.
Пример того, как вращается магнитное поле в электрическом двигателе
- Витки – это проводники, по которым при включении в сеть протекает электрический ток. Во время этого процесса вокруг проводника возникает электромагнитное поле.
- Мы знаем, что показатели переменного тока изменяются со временем – сначала он нарастает, затем падает до нуля, потом течет в обратном направлении по тому же принципу, и так до бесконечности. Именно поэтому переменный ток изображают в виде синусоиды.
Графическое изображение переменного тока
- В то время как изменяются показатели тока, меняются и параметры магнитного поля, вызываемого им.
- Особенностью трехфазных двигателей и генераторов является то, что в один момент времени по обмотке статора ток протекает в фазах со смещением на 120 градусов, то есть на треть времени одного такта.
- Такт – это 1 Герц, то есть прохождение переменным током одного полного цикла колебания синусоиды. Схематически это будет выглядеть вот так.
Смещение между фазами составляет ровно 120 градусов
- В результате в статоре двигателя одновременно образуется несколько магнитных полей, которые, взаимодействуя, дают результирующее поле.
Изменение магнитного поля в разные моменты времени
- Когда происходит изменение параметров токов, протекающих в фазах, начинает изменяться и результирующее магнитное поле. Выражается это в смене его ориентации, при том, что амплитуда остается одинаковой.
- В результате получается так, что магнитное поле вращается вокруг некой центральной оси.
А что будет, если внутрь данного магнитного поля поместить проводник?
Принцип электромагнитной индукции
Согласно закону об электромагнитной индукции, который мы подробно описывали в статье про генераторы постоянного и переменного тока, в проводнике возникает электродвижущая сила, сокращенно ЭДС. Если этот проводник замкнут на внешнюю цепь или на себя, то в нем потечет ток.
Согласно закону Ампера, на проводник с током, помещенным в магнитное поле, начинает действовать сила, и контур начинает вращаться. По этому принципу и работают асинхронные двигатели переменного тока, однако вместо рамки в магнитном поле находится короткозамкнутый ротор, который своим внешним видом напоминает беличье колесо.
Строение короткозамкнутого ротора
- Как видно из схемы выше, такой ротор состоит из параллельно расположенных стержней, которые с торцов замкнуты двумя кольцами.
- При подключении статора к электрической сети, он начинает формировать вращающееся магнитное поле, которое индуктирует во всех стержнях ротора ЭДС, из-за чего ротор начнет вращаться.
- При этом в разных стержнях будет отличаться направление текущего тока и его величина, в зависимости от того, в каком положении они находятся относительно полюсов магнитного поля. Опять-таки, если не понятно, то отсылаем вас снова к закону об электромагнитной индукции.

Изменение ЭДС на примере генератора переменного тока
Интересно знать! Стержни на роторе наклоняют относительно оси его вращения. Делается это для того, чтобы пульсация момента и высшие гармоники ЭДС, сокращающие эффективность двигателя, были меньше.
Особенности асинхронного двигателя
Неприхотливые в эксплуатации электромоторы
Итак, давайте разбираться с тем, какие двигатели переменного тока называются асинхронными.
Скольжение ротора
Главной особенностью таких агрегатов является то, что частота вращения ротора отличается от этого же показателя у магнитного поля.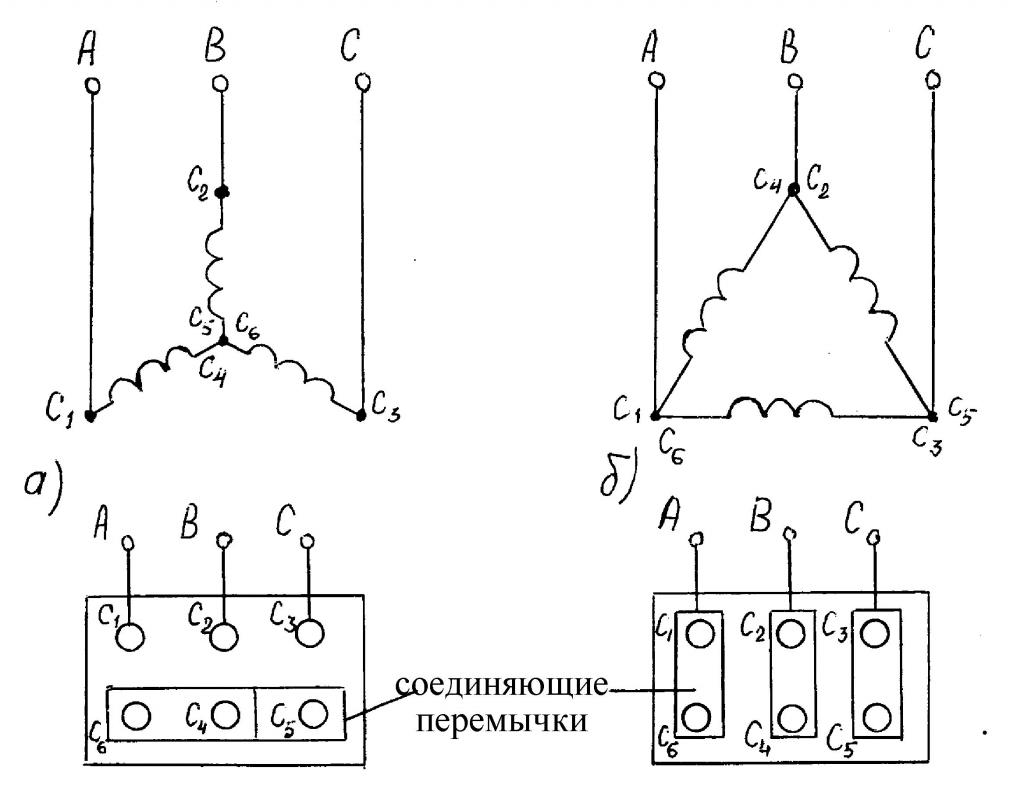 Назовем условно эти значения n2 и n1, соответственно.
Назовем условно эти значения n2 и n1, соответственно.
Объяснить это можно тем, что индуцироваться ЭДС может только при этом неравенстве – n2 должна быть меньше n1. Разница в частотах этих вращений называется частотой скольжения, а сам эффект отставания ротора и называется скольжением, которое обозначается как «s». Высчитать этот параметр можно по следующей формуле: s = (n1-n2)/n1.
Асинхронный двигатель в разрезе
- Давайте представим себе ситуацию, в которой частоты n1 и n2 будут одинаковыми. В этом случае положение стержней ротора относительно магнитного поля будет неизменным, а значит, движение проводников относительно магнитного поля происходить не будет, то есть ЭДС не индуктируется, и ток не течет. Отсюда следует вывод, что сил приводящих ротор в движение возникать не будет.
- Если предположить, что изначально двигатель был в движении, то теперь ротор начнет замедляться, отставая от магнитного поля, а значит, стержни сместятся относительно магнитного поля и снова начнет расти ЭДС и движущая сила, то есть вращение снова возобновится.
- Приведенное описание довольно грубое. В реальности ротор асинхронного двигателя никогда не может догнать скорость вращения магнитного поля, поэтому крутится равномерно.
- Уровень скольжения тоже величина непостоянная, и может изменяться от 0 до 1, или другими словами, от 0 до 100 процентов. Если скольжение близко к 0, что соответствует холостому режиму работы двигателя, то есть ротор не будет испытывать противодействующий момент. Если значение этого параметра близко к 1 (режим короткого замыкания), то ротор будет неподвижен.
- Отсюда можно сделать вывод, что скольжение напрямую будет зависеть от механической нагрузки на вал двигателя, и чем она больше, тем выше и коэффициент.
Принцип работы асинхронного двигателя
- Для асинхронных двигателей средней и малой мощности допустимый коэффициент скольжения находится в диапазоне от 2 до 8%.
Мы уже написали, что такой двигатель преобразует электрическую энергию с обмоток статора в кинетическую, однако стоит понимать, что эти силы не равны друг другу.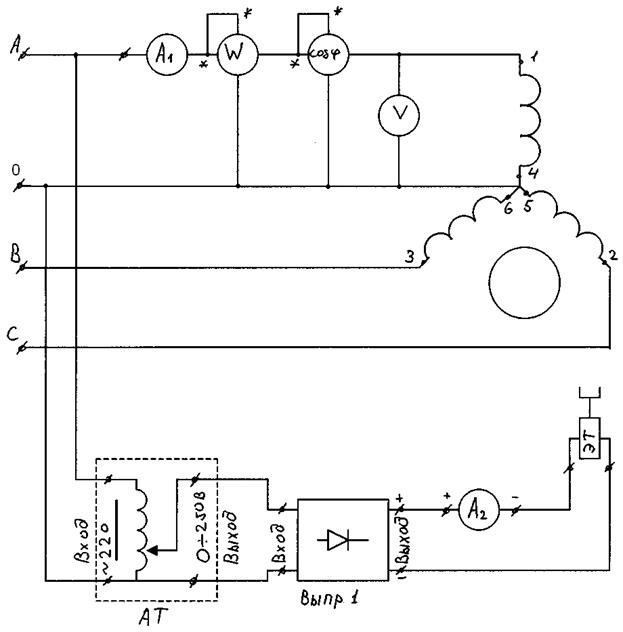 Всегда при преобразовании происходят потери на гистерезисе, нагреве, трении и вихревых токах.
Всегда при преобразовании происходят потери на гистерезисе, нагреве, трении и вихревых токах.
Данная часть энергии рассеивается в виде тепловой, поэтому двигатель и оборудуется вентилятором для охлаждения.
Питание двигателя
Схема подключения
Давайте теперь разберемся с тем, как происходит подключение асинхронного электродвигателя переменного тока.
- Мы уже вкратце описывали, как протекает ток в трехфазной сети, но не совсем понятно, какие выгоды такое питание имеет перед однофазными или двухфазными аналогами.
- В первую очередь можно отметить экономичность системы с таким подключением.
- Также для нее характерна большая эффективность.
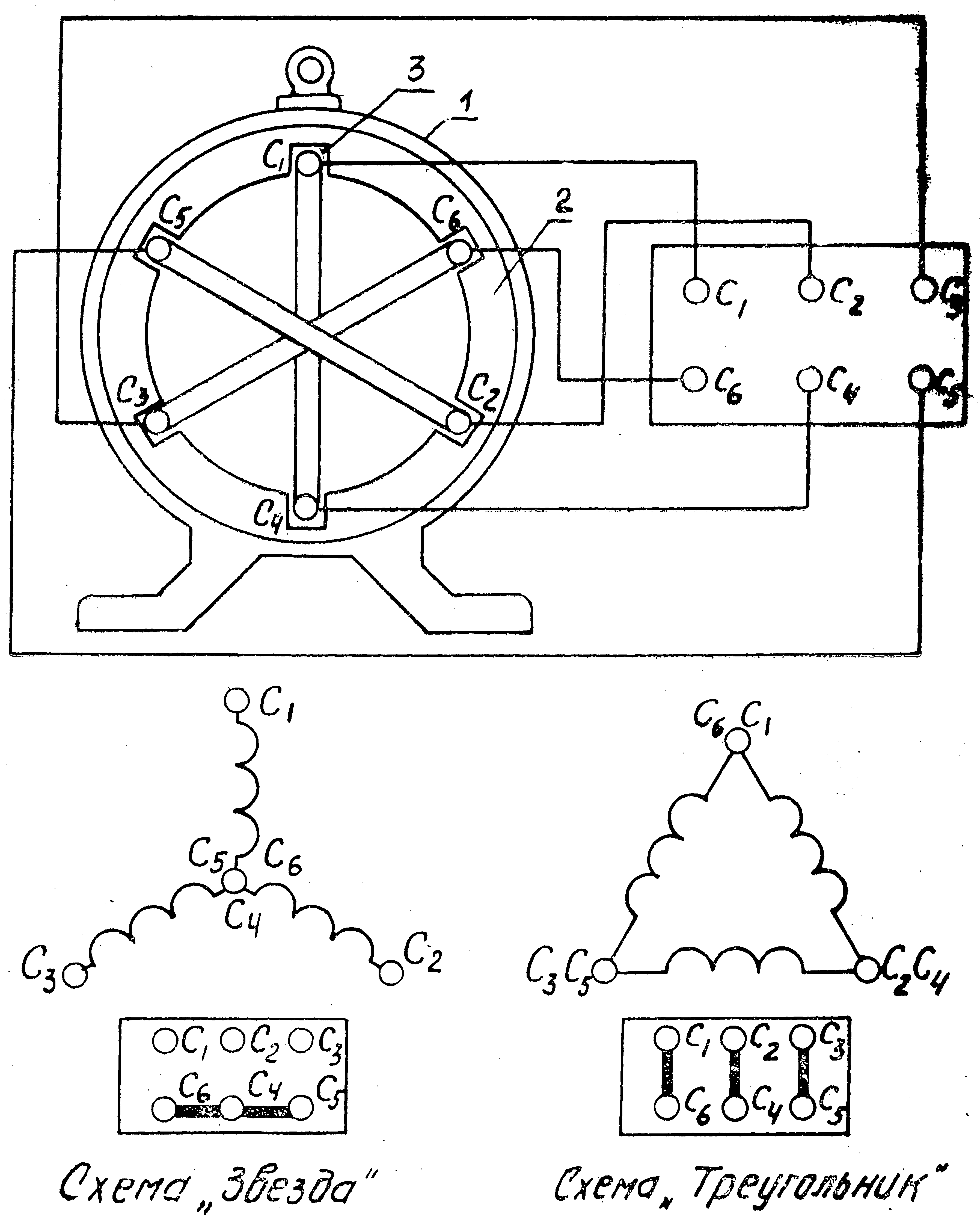
Фазы подключаются к обмотке статора по определенным схемам, называемым звезда и треугольник, каждая из которых имеет свои особенности. Соединения эти могут быть выполнены как внутри двигателя, так и снаружи, в распределительной коробке. В первом случае из корпуса выходит три провода, а во втором шесть.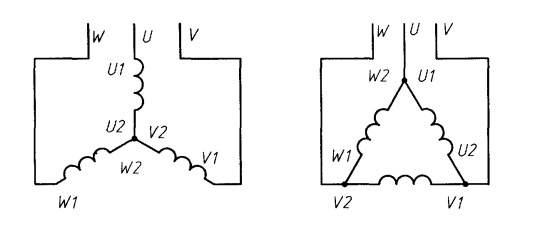
Для лучшего понимания принципов работ схем давайте введем некоторые понятия:
- Фазное напряжение – напряжение в одной фазе, то есть разница потенциалов между ее концами.
- Линейное напряжение – это разница в потенциалах разных фаз.
Эти значения очень важны, так как позволяют рассчитать потребляемую мощность электромотора.
Вот формулы, предназначенные для этого:
Формулы расчета мощности двигателя
Данные формулы вычисления мощности двигателя справедливы для подключения и звездой, и треугольником. Однако стоит всегда учитывать, что подключение одного и того же двигателя разными способами будет сказываться на его энергопотреблении.
А если потребляемая мощность не соответствует параметрам двигателя, то может произойти расплавление обмотки статора, и моментальный выход из строя агрегата.
Чтобы понять это лучше, давайте разберем один наглядный пример:
- Представьте двигатель, подключенный по схеме «звезда», который подключен в сеть переменного тока. Линейное напряжение будет составлять 380В, а фазовое 220В. Потребляет при этом он 1А.
- Высчитываем мощность: 1,73*380*1 = 658 Вт – 1,73 является корнем из 3.
- Если сменить схему подключения на треугольник, то получится следующее. Линейное напряжение останется без изменений и составит 380В, а вот фазовое напряжение (вычисляем по первой формуле) увеличится и станет таким же 380В.
- Увеличенное в корень из 3 раз фазовое напряжение, приведет к увеличению в такое же количество раз фазового тока. То есть Iл будет равно не 1, а 1,73*1,73, что приблизительно равняется 3
- Повторяем расчет мощности: 1,73*380*3 = 1975 Вт.
 Линейное напряжение будет составлять 380В, а фазовое 220В. Потребляет при этом он 1А.
Линейное напряжение будет составлять 380В, а фазовое 220В. Потребляет при этом он 1А.Как видно из примера, потребляемая мощность стала намного больше, и если двигатель не рассчитан на работу в таком режиме, то он неизбежно перегорит.
Как выглядят схематично разбираемые подключения обмотки
Подключение трехфазного двигателя асинхронного типа к однофазной сети
Разобрав принцип работы трехфазного асинхронного двигателя переменного тока, становится понятным, что напрямую подключить его к общественным сетям, в который «царит» одна фаза, не так просто. Выполнить такое подключение становится возможным, если применить фазосдвигающие элементы.
Выполнить такое подключение становится возможным, если применить фазосдвигающие элементы.
Варианты подключения трехфазного двигателя к однофазной сети
При таком подключении двигатель может работать в двух режимах:
- Первый ничем не отличается от работы однофазных двигателей (смотреть рисунки а, б и г, где применяется пусковая обмотка). При таком режиме работы двигатель способен выдать лишь 40-50% от своей номинальной мощности.
- Второй (в, д, е) – режим конденсаторного двигателя, при котором агрегат способен выдать до 80-ти% мощности (в схему включен постоянно работающий конденсатор).
Совет! Емкость конденсатора рассчитывается по специальным формулам, согласно выбранной схеме.
Как управлять электродвигателем
Управление асинхронным электродвигателем переменного тока может быть реализовано тремя способами:
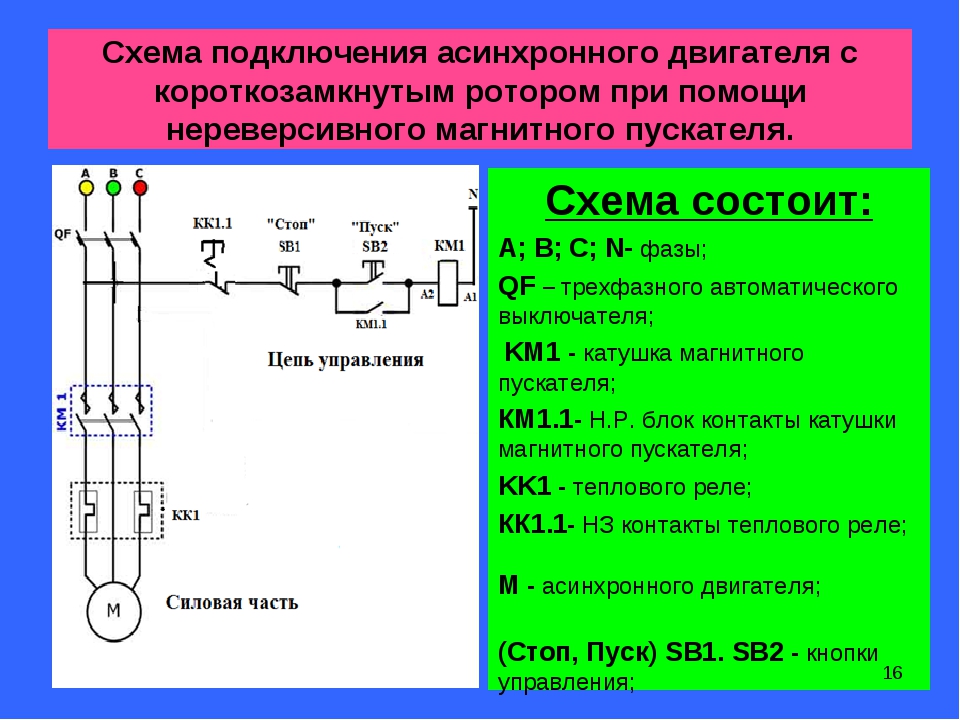
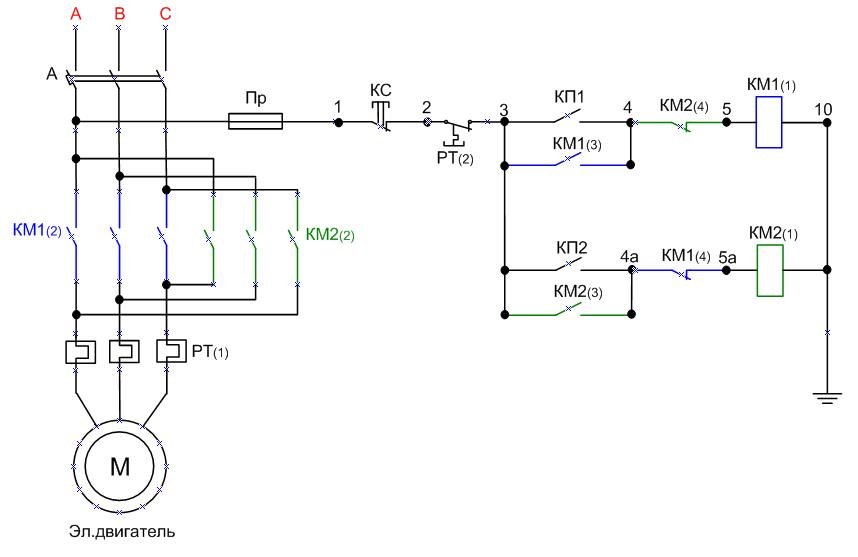
Магнитный пускатель
- Прямое подключение к питающей сети – для этого применяются магнитные пускатели, с помощью которых можно реализовать нереверсивные и реверсивные режимы работы мотора. Отличие, думаем понятно – во втором случае двигатель мотет вращаться в другом направлении. Недостатком такого подключения является то, что в цепи присутствуют большие пусковые токи, что не очень хорошо для самого агрегата. Цена такого устройства будет самой низкой
 Отличие, думаем понятно – во втором случае двигатель мотет вращаться в другом направлении. Недостатком такого подключения является то, что в цепи присутствуют большие пусковые токи, что не очень хорошо для самого агрегата. Цена такого устройства будет самой низкой
Отличие, думаем понятно – во втором случае двигатель мотет вращаться в другом направлении. Недостатком такого подключения является то, что в цепи присутствуют большие пусковые токи, что не очень хорошо для самого агрегата. Цена такого устройства будет самой низкойУстройство плавного пуска
- Плавный пуск двигателя – такие устройства для управления применяются тогда, когда вам требуется возможность регулировки скорости вращения вала при запуске двигателя. Показанный прибор уменьшает пусковые токи, в результате чего защищает двигатель от больших пусковых токов. Оно обеспечивает плавный старт и остановку вала.
Частотный преобразователь
- Самым дорогим и сложным подключением электрического двигателя является применение частотного преобразователя. Такое решение используется тогда, когда требуется регулировка скорости вращения вала двигателя не только при старте и торможении. Данное устройство способно менять частоту и напряжение подаваемого на двигатель тока.
- Его применение имеет следующие плюсы: во-первых сокращается энергопотребление мотора; во-вторых, как и устройство плавного пуска, двигатель защищается от ненужных перегрузок, что благотворно сказывается на его состоянии и сроке службы.

Частотные преобразователи могут реализовать следующие методы регулирования:
Скалярное управление
- Управление скалярного типа. Наиболее простой и недорогой в реализации, обладающий медленным откликом на изменение нагрузки в сети и небольшим диапазоном регулировки, в виде недостатков. Из-за того подобное управление применимо лишь там, где изменение нагрузки происходит по определенному закону, например, переключение режимов в фене.
- Управление векторного типа. Данная схема применяется там, где требуется обеспечить независимое управление вращением электродвигателя, например, в лифте. Она позволяет сохранять одинаковые обороты даже при изменяющихся параметрах нагрузки.
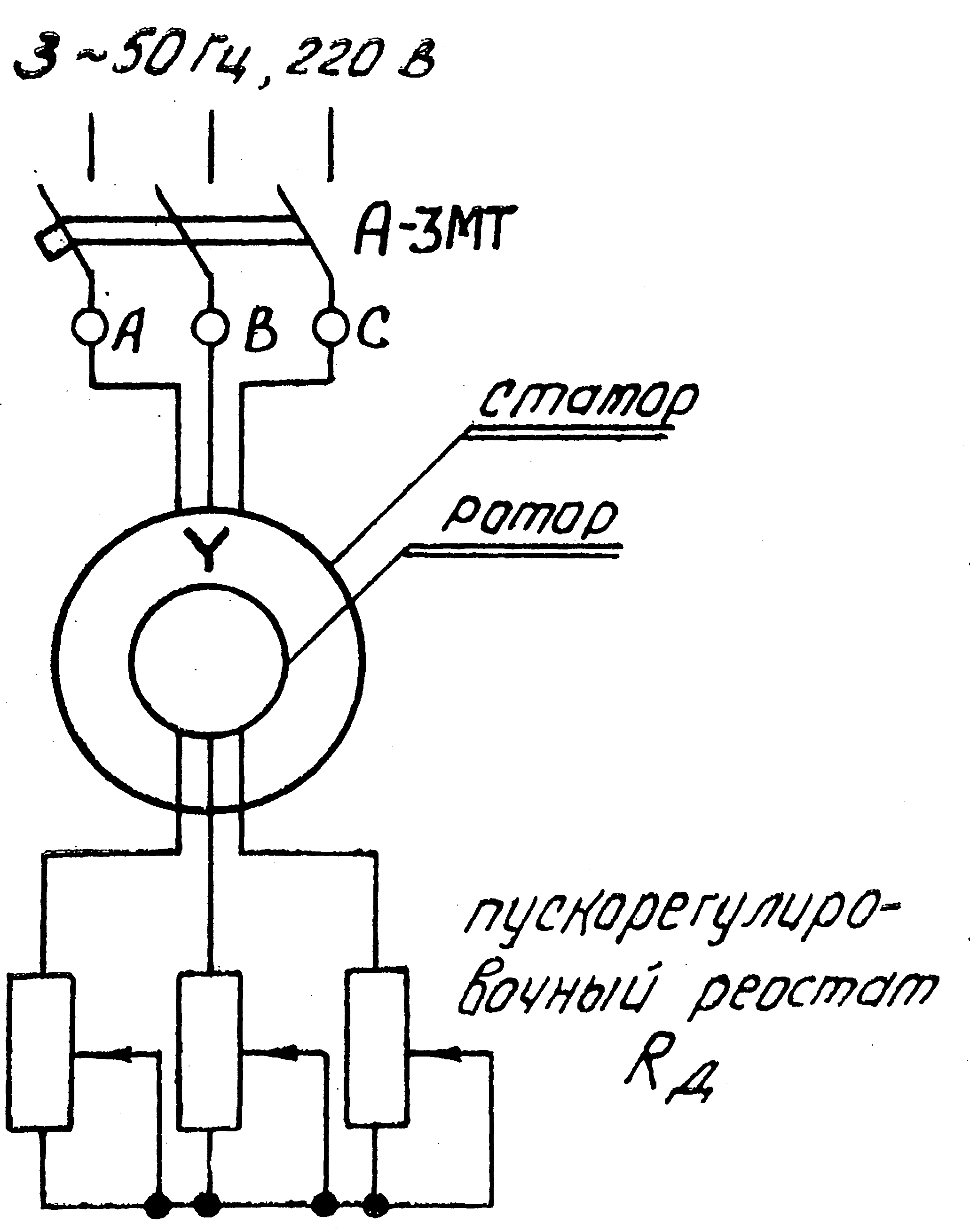
Асинхронный двигатель с фазным ротором
Более сложная конструкция асинхронного двигателя
До того момента, как частотные преобразователи получили широкое распространение, асинхронные двигатели большой и средней мощности изготавливались с фазным ротором. Такая конструкция дает двигателю лучшие свойства по плавному пуску и регулировке оборотов, однако эти агрегаты намного сложнее в плане строения.
Такая конструкция дает двигателю лучшие свойства по плавному пуску и регулировке оборотов, однако эти агрегаты намного сложнее в плане строения.
- Статор такого мотора ничем не отличается от того, что устанавливается в двигателях с короткозамкнутым ротором, но вот сам ротор устроен по-другому.
- Также как и статор, он имеет трехфазную обмотку, которая подключается «звездой» к контактным кольцам. Обмотка укладывается в пазы стального сердечника, от которого она изолируется.
Кольца контактные
- Контактные кольца соединяются через графитовые щетки с трехфазным пусковым или регулировочным реостатом, с помощью которого и производится пуск ротора.
Реостат жидкостного типа
- Реостаты бывают металлическими и жидкостными. Первые (их еще называют проволочными) – ступенчатые, которые управляются механическим переключением своими руками рукояти контроллера, либо автоматически, при помощи контроллера с электроприводом. Вторые представляют собой некие сосуды с электролитом, в который опущены электроды. Изменение сопротивления такого реостата осуществляется за счет глубины их погружения.
 Изменение сопротивления такого реостата осуществляется за счет глубины их погружения.
Изменение сопротивления такого реостата осуществляется за счет глубины их погружения.Интересно знать! Отдельные модели АДФР, с целью увеличения КПД и ресурса щеток, после запуска ротора поднимают щетки и за счет короткозамкнутого механизма замыкают кольца.
На сегодняшний день устройства с фазными роторами практически не применяются, так как их эффективно заменяют асинхронные двигатели с короткозамкнутым ротором, оснащенные частотным преобразователем.
На этом подведем итог. Мы узнали строение асинхронного трехфазного двигателя и принцип его работы. Материал для большинства читателей будет теоретическим, но, думаем, все равно интересным. Если вам нужно узнать, как выполнить ремонт асинхронного двигателя переменного тока, то прочтите предыдущую статью на нашем сайте. Там будет дана инструкция по разбору, и рассказано, что можно диагностировать и исправить самостоятельно, не обращаясь в мастерскую. Также рекомендуем к просмотру подобранное нами видео.
Также рекомендуем к просмотру подобранное нами видео.
Подключение двигателей к различным видам ПЧ
Рассмотрим схемы включения асинхронных двигателей «звезда» и «треугольник» в контексте их питания от преобразователей частоты. Для начала немного освежим в памяти теорию.
Что такое «звезда» и «треугольник»
Обычно используются асинхронные двигатели с тремя обмотками, которые можно подключить двумя способами — по схеме «звезда» (обозначается символом «Y») или «треугольник» («Δ» или «D»). Схема соединения должна обеспечивать нормальную работу двигателя при имеющемся напряжении питания.
Первое, от чего необходимо отталкиваться при выборе схемы — информация на шильдике двигателя. На нем указываются параметры для обеих схем. Наиболее важный параметр — напряжение питания. Напряжение «звезды» в 1,73 раза (точнее в квадратный корень из 3) больше, чем «треугольника». Например, если указано, что напряжение питания двигателя, включенного по схеме «звезда», составляет 380 В, то можно точно сказать, даже не глядя на шильдик, что для включения по схеме «треугольник» необходимо напряжение 220 В.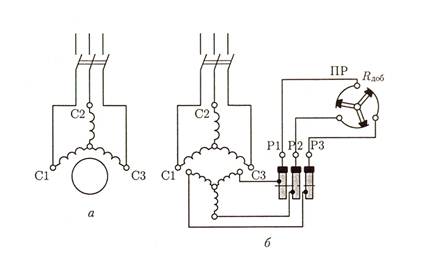 В данном случае напряжение 380 В соответствует линейному напряжению в стандартной сети, и двигатель можно подключать по схеме «звезда» через контактор либо через частотный преобразователь. То же самое справедливо и для случаев, когда напряжение «треугольника», указанное на шильдике, равно 380 В. Тогда, умножая на 1,73, получаем напряжение «звезды» равным 660 В.
В данном случае напряжение 380 В соответствует линейному напряжению в стандартной сети, и двигатель можно подключать по схеме «звезда» через контактор либо через частотный преобразователь. То же самое справедливо и для случаев, когда напряжение «треугольника», указанное на шильдике, равно 380 В. Тогда, умножая на 1,73, получаем напряжение «звезды» равным 660 В.
Эти два типа двигателей, отличающиеся напряжениями питания (220/380 и 380/660 В), в подавляющем большинстве случаев используются на практике и имеют свои особенности подключения, которые мы рассмотрим ниже.
Классическая схема «звезда» / «треугольник»
При питании «напрямую» от промышленной сети с линейным напряжением 380 В подойдут оба типа двигателей. Нужно лишь убедиться, что схема включения обмоток собрана на нужное напряжение.
Однако на практике для питания в схеме «звезда» / «треугольник» применяют второй тип приводов (380/660 В). Данная схема используется для уменьшения пускового тока мощных двигателей, который может превышать рабочий в несколько раз. Несмотря на то, что этот ток кратковременный, в течение разгона питающая сеть и привод испытывают значительные электрические и механические перегрузки – ведь в первую долю секунды ток двигателя может в 10 раз превышать номинал, плавно снижаясь в процессе разгона.
Несмотря на то, что этот ток кратковременный, в течение разгона питающая сеть и привод испытывают значительные электрические и механические перегрузки – ведь в первую долю секунды ток двигателя может в 10 раз превышать номинал, плавно снижаясь в процессе разгона.
Схема подключения «звезда» / «треугольник» приведена во многих источниках, поэтому лишь напомним коротко, как она работает.
Чтобы сделать процесс пуска более щадящим, сначала напряжение 380 В подают на обмотки двигателя, включенные по схеме «звезда». Поскольку рабочее напряжение этой схемы должно быть больше (660 В), двигатель работает на пониженной мощности. Через несколько секунд, после того, как привод раскрутится, включается «треугольник», для которого 380 В является рабочим напряжением, и двигатель выходит на номинальную мощность.
Классическую схему мы рассмотрели, а теперь разберём, в каких случаях использовать подключение двигателей в «звезде» и «треугольнике» при питании от преобразователя частоты.
Преобразователи частоты на 220 В
При питании преобразователя частоты от одной фазы (фазное напряжение 220 В) линейное напряжение на его выходе не может быть более 220 В. Поэтому для питания асинхронного двигателя от однофазного ПЧ нужно подключить обмотки привода с напряжениями 380/220 В по схеме «треугольник». Этот же двигатель, подключенный по схеме «звезда», будет работать с пониженной мощностью.
Преобразователи частоты на 380 В
Трехфазные ПЧ являются более универсальными с точки зрения подключения двигателей с разным напряжением питания. Главное – собрать в клеммнике (борно) двигателя схему на напряжение 380 В. Именно этот вариант используется в большинстве частотных преобразователей, работающих в промышленном оборудовании.
ПЧ с возможностью переключения «звезда» / «треугольник»
В некоторых преобразователях, работающих с мощными двигателями, имеется возможность оперативного переключения схемы работы. Это делается с целью расширения диапазона регулировки скорости двигателя вверх от номинальной. Метод основан на том факте, что подключение «звездой» обеспечивает более высокий момент на малой скорости, а подключение «треугольником» — высокую скорость. Можно задавать выходную частоту, на которой происходит переключение, время паузы (задержки) переключения, параметры двигателя для первого и второго режимов.
Это делается с целью расширения диапазона регулировки скорости двигателя вверх от номинальной. Метод основан на том факте, что подключение «звездой» обеспечивает более высокий момент на малой скорости, а подключение «треугольником» — высокую скорость. Можно задавать выходную частоту, на которой происходит переключение, время паузы (задержки) переключения, параметры двигателя для первого и второго режимов.
У частотных преобразователей такого типа имеются выходы для включения соответствующих контакторов, обеспечивающих формирование нужных схем включения.
Настройки ПЧ для схем «звезда» и «треугольник»
Когда выбирается схема подключения, нужно помнить о том, что некоторые параметры в настройках ПЧ чувствительны к выбору вида схемы, например, номинальное напряжение и номинальный ток.
Бывает так, что необходимо подключить двигатель, собранный по схеме «треугольник» на напряжение 220 В, к выходу трехфазного ПЧ, линейное напряжение которого при частоте 50 Гц равно 380 В. Понятно, что в этом случае двигатель нужно включить в «звезду», но иногда этого сделать невозможно.
Понятно, что в этом случае двигатель нужно включить в «звезду», но иногда этого сделать невозможно.
Выход есть. Необходимо указать номинальную частоту двигателя равной не 50 Гц, как указано на шильдике, а 87 Гц (в 1,73 раза больше). Аналогичным образом нужно задать и максимальную выходную частоту преобразователя. В результате того, что отношение V/F на выходе ПЧ остается неизменным, на частоте 50 Гц напряжение на обмотках двигателя составит как раз 220 В. При этом верхнюю рабочую частоту двигателя необходимо установить на значение 50 Гц.
Преимуществом такого подключения является возможность повышения рабочей частоты двигателя выше 50 Гц, при этом вплоть до 87 Гц двигатель не будет терять рабочий момент. В данном случае важно следить за механическим износом системы и за нагревом привода.
Другие полезные материалы:
Обзор устройств плавного пуска Siemens
Назначение сетевых и моторных дросселей
FAQ по электродвигателям
Подключение трехфазного двигателя к однофазной сети через конденсатор: схема, подбор
Многие любители и профессионалы применяют в работе электрооборудование различного предназначения. И во многих случаях электрооборудование приводится в движение трехфазными двигателями. Но трехфазная сеть зачастую недоступна в гаражных боксах и индивидуальных домовладениях. И тогда на помощь приходят схемы подключения трехфазного двигателя в однофазную сеть.
И во многих случаях электрооборудование приводится в движение трехфазными двигателями. Но трехфазная сеть зачастую недоступна в гаражных боксах и индивидуальных домовладениях. И тогда на помощь приходят схемы подключения трехфазного двигателя в однофазную сеть.
Для чего нужен конденсатор
Наиболее распространены и применяются в станках трехфазные асинхронные двигатели переменного тока с короткозамкнутым ротором. Их подключение к однофазной сети мы и будем рассматривать. При включении двигателя в трехфазную сеть по трем обмоткам, в разный момент времени протекает переменный ток. Этот ток создает вращающееся магнитное поле, которое начинает вращать ротор двигателя.
При подключении двигателя к однофазной сети, ток по обмоткам течет, но вращающегося магнитного поля нет, ротор не крутится. Выход из этой ситуации был найден. Самым простым и действенным способом оказалось параллельное подключение конденсатора к одной из обмоток двигателя. Конденсатор, импульсно получая и отдавая энергию создает смещение фазы, в обмотках двигателя получается вращающееся магнитное поле и он работает.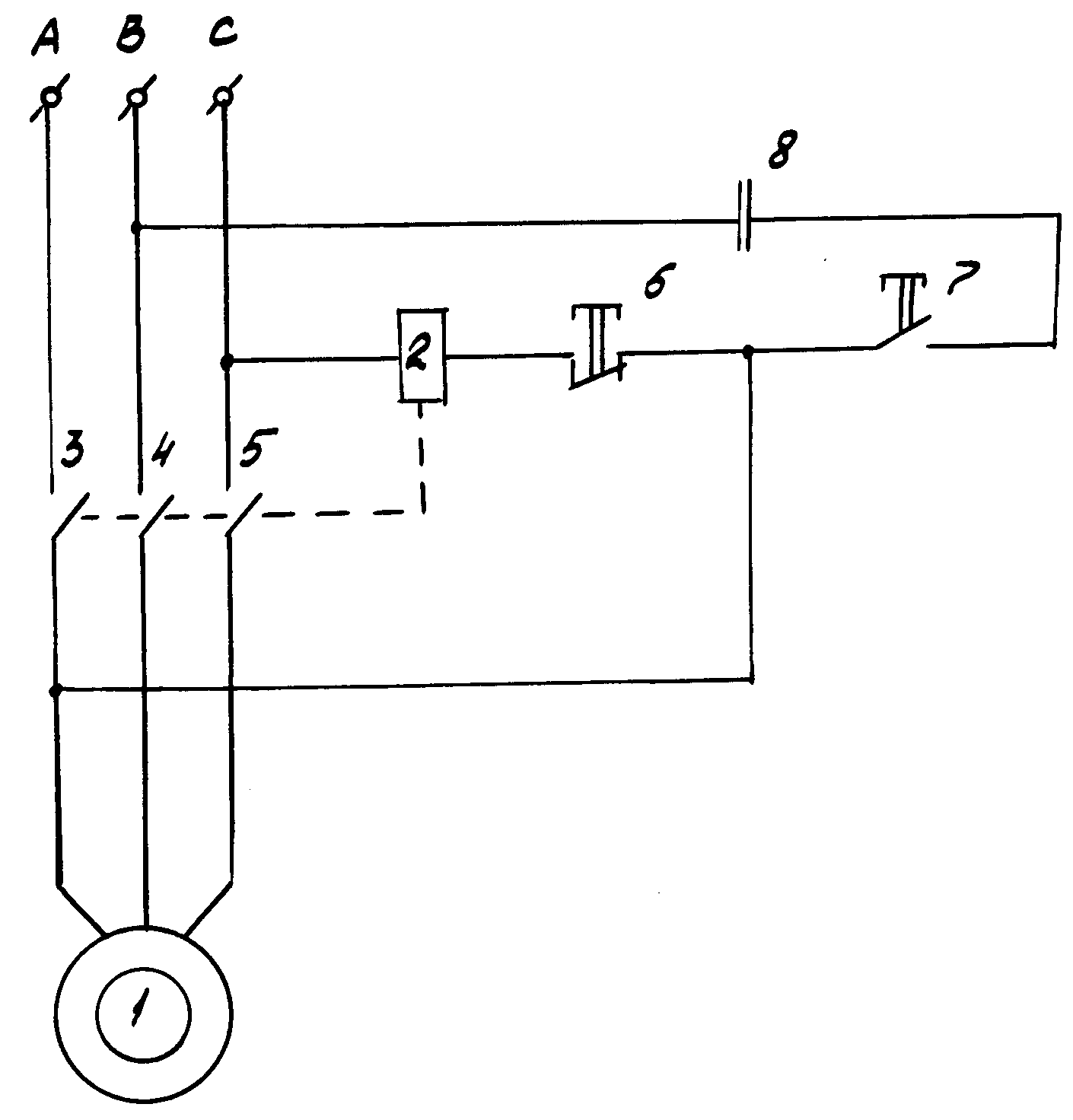 Емкость постоянно находится под напряжением и называется рабочим конденсатором.
Емкость постоянно находится под напряжением и называется рабочим конденсатором.
ВАЖНО! Правильно рассчитать и подобрать емкость рабочего конденсатора и его тип.
Как правильно подобрать конденсаторы
Теоретически предполагается осуществлять расчет необходимой емкости путем деления силы тока на напряжение и полученную величину умножить на коэффициент. Для разного типа соединений обмоток коэффициент составляет:
- звездой – 2800;
- треугольником — 4800.
Недостатком этого метода является то, что не всегда на электродвигателе сохранилась табличка с данными. Невозможно точно знать коэффициент мощности и мощность двигателя, а следовательно и силу тока. К тому же на силу тока могут действовать такие факторы как отклонения напряжения в сети и величина нагрузки на двигатель.
Поэтому следует применять упрощенный расчет емкости рабочих конденсаторов. Просто учесть, что на каждые 100 ватт мощности необходимо 7 микрофарад емкости. Удобнее использовать несколько параллельно соединенных конденсаторов малой, желательно одинаковой емкости, чем один большой. Просто суммируя емкость собранных конденсаторов, можно легко определить и подобрать оптимальное значение. Для начала лучше процентов на десять занизить суммарную емкость.
Удобнее использовать несколько параллельно соединенных конденсаторов малой, желательно одинаковой емкости, чем один большой. Просто суммируя емкость собранных конденсаторов, можно легко определить и подобрать оптимальное значение. Для начала лучше процентов на десять занизить суммарную емкость.
Если двигатель легко запускается и мощности его достаточно для работы, то все подобрано правильно. Если нет – нужно еще подсоединять конденсаторы, пока двигатель не достигнет оптимальной мощности.
СПРАВКА. При подключении трехфазного асинхронного двигателя с короткозамкнутым ротором в однофазную сеть теряется не менее трети его мощности.
Следует помнить, что много не всегда хорошо, и при превышении оптимальной емкости рабочих конденсаторов двигатель будет перегреваться. Перегрев может привести к сгоранию обмоток и выходу электродвигателя из строя.
ВАЖНО! Конденсаторы следует соединять между собой параллельно.

Желательно выбирать конденсаторы с рабочим напряжением не менее 450 вольт. Самыми распространенными являются так называемые бумажные конденсаторы, с буквой Б в наименовании. В настоящее время выпускаются и специализированные, так называемые моторные конденсаторы, например К78-98.
ВНИМАНИЕ! Желательно выбирать конденсаторы для переменного тока. Использование иных тоже возможно, но связано с усложнением схемы и возможными нежелательными последствиями.
В случае, если запуск двигателя осуществляется под нагрузкой и происходит тяжело, необходим еще и пусковой конденсатор. Он включается параллельно рабочему на непродолжительное время пуска электродвигателя. Его емкость должна быть равной или не более чем в два раза превышать емкость рабочего.
Схема подключения электродвигателя 380 на 220 вольт с конденсатором
Подключить трехфазный двигатель в однофазную сеть несложно и с этим справится даже электромонтер-любитель.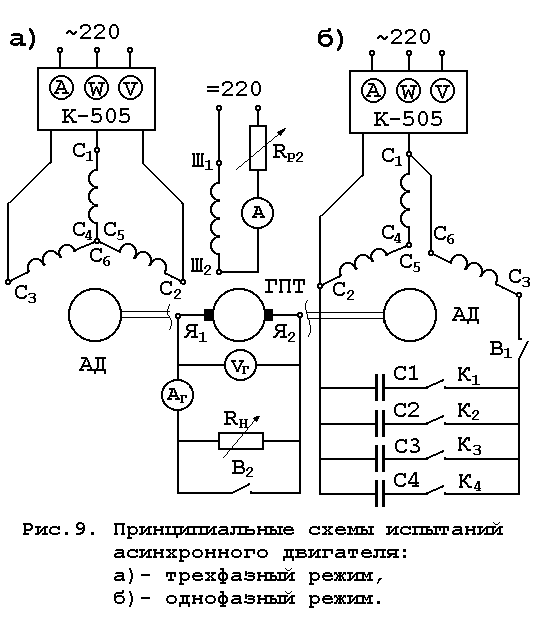 Если возникают затруднения, следует обратиться к друзьям или знакомым. Рядом всегда найдется грамотный электрик.
Если возникают затруднения, следует обратиться к друзьям или знакомым. Рядом всегда найдется грамотный электрик.
Обмотки трехфазных двигателей с рабочим напряжением 380 на 220 для работы в сети на триста восемьдесят вольт соединены по схеме звезда. Это значит, что концы обмоток соединены между собой, а начала подсоединяются в сеть. Для возможности работы электродвигателя в однофазной сети 220 вольт необходимо для начала его обмотки переключить на схему треугольник. Т.е. конец первой соединить с началом второй, конец второй с началом третьей и конец третьей с началом первой.
Эти соединения и будут выводами двигателя для подключения к электропитанию. Два вывода необходимо через двухполюсной выключатель подсоединить к нулю и фазе сети в 220 вольт. Третий вывод через рабочие конденсаторы, соединить с каким либо из первых двух выводов из двигателя. Можно пробовать запускать.
Если запуск прошел успешно, двигатель работает с приемлемой мощностью и не сильно греется, то можно ничего не менять. Получилась работоспособная схема только с рабочими конденсаторами.
Получилась работоспособная схема только с рабочими конденсаторами.
В случае запуска под нагрузкой или просто тяжелого пуска двигателя, он может раскручиваться долго и не достигать приемлемой мощности. Тогда потребуется включить в схему еще и пусковую емкость. Пусковые конденсаторы выбираются того же типа, что и рабочие. Одинаковой или в два раза превышающей ёмкость рабочих. И подключаются параллельно им. Используются только для пуска электродвигателя.
Очень удобно для такого пуска использовать своеобразный выключатель серии АП. Важно чтобы он был в исполнении
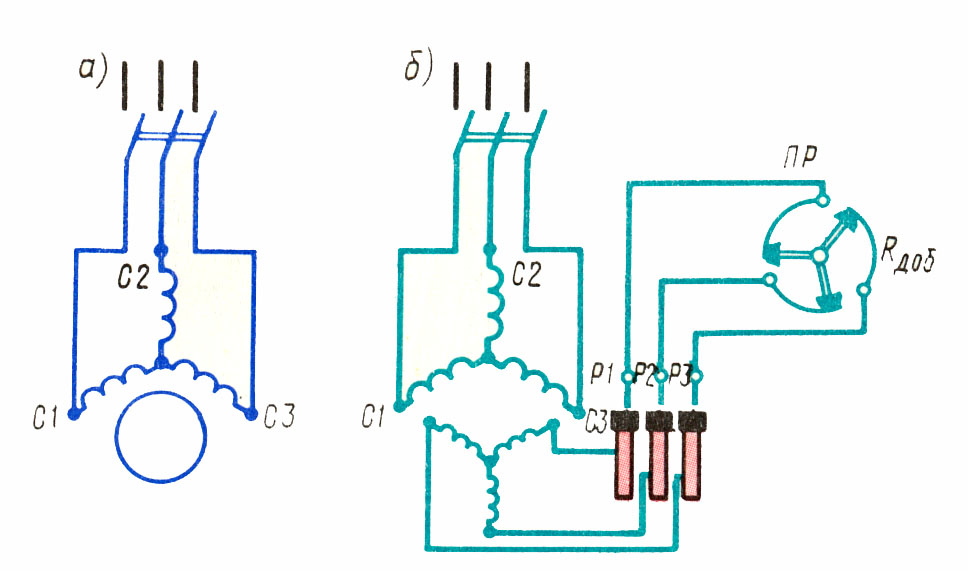
В условиях небольших электроремонтных цехов, мастерских или в домах сельских жителей часто необходимо использовать трехфазные асинхронные электродвигатели для привода различных механизмов (станков, шлифовальных кругов, циркулярных пил и т. д.), когда нет трехфазной сети. Следует иметь в виду, что работа трехфазного электродвигателя от однофазной сети нежелательна, так как при этом на одну треть снижается его момент и возникает асимметрия в питающей сети. При питании трехфазного электродвигателя от однофазной сети обмотку третьей фазы включают через фазосдвигающий конденсатор, как показано на рисунке 32. Чтобы двигатель (особенно под нагрузкой) пускался нормально, кроме рабочего конденсатора Сp предусмотрен пусковой Сп, который сразу же после пуска отключают от сети выключателем S2. Совет Рис. 32. Схемы включения трехфазного асинхронного электродвигателя в однофазную сеть при соединении обмоток звездой (а) и треугольником (б) Если обмотка статора соединена по схеме, показанной на рисунке 32, а, то для трехфазного электродвигателя емкость рабочего конденсатора, мкФ: а если по схеме, приведенной на рисунке 32, б, то При известной мощности электродвигателя (указана в паспорте или на щитке) фазный номинальный ток, А:
должно быть не менее чем в два раза больше номинального напряжения сети. Конденсаторы Ср выбирают серий МБГО, МБГП, МБГЧ, КБГ-МН, БГТ и др. Так как пусковой конденсатор Сп включается лишь на несколько секунд, то можно использовать более дешевые электролитические элементы, например типа ЭП. Реверсирование электродвигателя легко выполнить с помощью переключателя S1. Если это не требуется, то переключатель не нужен. Эксплуатация электродвигателей с конденсаторным пуском имеет некоторые особенности. Так, при работе вхолостую или с недогрузкой по обмотке, соединенной последовательно с конденсатором, протекает ток, на 20… 40 % превышающий номинальный. В этом случае необходимо соответственно уменьшить емкость рабочего конденсатора Ср. Обратите внимание Следует также иметь в виду, что при таком включении мощность, развиваемая электродвигателем, не превосходит 65 % номинальной. | При всем современном многообразии выбора бытового электроинструмента, по прежнему существует потребность в применении более мощных асинхронных электродвигателей. Предпосылок к этому немало – применяемые в качестве двигателей электроинструмента коллекторные машины не превосходят по мощности потолок в 1 – 1,5 кВт (дальнейшее увеличение по мощности приводит к увеличению по массагабаритным показателям), а ведь иногда требуется привод более мощный (самодельные циркулярные или ленточные пилы, электрофуганки с шириной прохода 50 и более сантиметров и т.д). Все эти инструменты приводятся в движение как правило при помощи трехфазных электродвигателей. К сожалению, трехфазная сеть в быту – явление крайне редкое, поэтому для их питания от обычной электрической сети самодельщики применяют: фазосдвигающий конденсатор; тринисторные фазосдвигающие устройства; другие емкостные и индукционно-емкостные фазосдвигающие схемы. Среди различных способов запуска асинхронных электродвигателей с короткозамкнутым ротором, наиболее простым является способ подключения одной из обмоток двигателя через фазосдвигающий конденсатор. Для работы двигателя с конденсаторным пуском необходимо, чтобы емкость конденсатора менялась в зависимости от числа оборотов. На практике это условие практически невыполнимо, поэтому при пуске двигателя подключают два конденсатора (Ср – рабочий конденсатор; Сп – пусковой конденсатор). Такую схему подключения выбирают только втом случае, если на маркировке двигателя указано напряжение питания 220/380v. Работает схема так: после включения пакетного выключателя П1, необходимо сразу нажать пусковую кнопку »Разгон». После того как двигатель наберет обороты кнопку отпускают. Реверсирование двигателя осуществляется путем переключения фаз на его обмотке посредством тумблера SA1. Для разряда конденсаторов используется сопротивление R1. Емкость рабочего конденсатора можно расчитать по следующим формулам. Для схемы подключения »треугольник»: Ср=4800*(I/U) где Ср – емкость конденсатора в микрофарадах, I – ток потребления электродвигателя в амперах, U – напряжение питающей сети. Совет Для схемы подключения »звезда»: Ср=2800*(I/U) где Ср – емкость конденсатора в микрофарадах, I – ток потребления двигателя в амперах, U – напряжение питающей сети. Емкость пускового конденсатора Сп выбирают в 2-2,5 раза большей емкости рабочего конденсатора. Конденсаторы должны быть расчитаны на напряжение в 1,5 раза большее чем напряжение питающей сети. Для пуска двигателей применяют конденсаторы типа МБГО, МБГЧ, МБГП или специализированные пусковые (высокая цена). Для подбора необходимых конденсаторов можно воспользоваться таблицей. Но как же поступить, если не удалось достать конденсаторов нужной емкости? Не волнуйтесь, выход есть. Практика применения бумажных конденсаторов для подключения трехфазных двигателей показала, что вместо этих громоздких монстров можно применить и электролитические конденсаторы. Посмотрите на эквивалентные схемы замены бумажных конденсаторов электролитами.
При большей мощности можно взять диоды типа ДЛ 200 или поставить несколько менее мощных параллельно и на радиаторах. Принципиальную схему включения электродвигателя с применением электролитических конденсаторов смотрите на рисунке. Принцип действия данной схемы и все производимые при пуске манипуляции такие же как и для схемы описанной выше. Но что если вам требуется подключить к сети двигатель мощностью 3 – 4 кВт? Двигатели такого типа расчитаны на применение только в сетяз 380V, их обмотки соединены »звездой» и в клеммной коробке имеется всего три вывода. Включение такого двигателя в сеть 220v приводит к снижению его номинальной мощности в з раза. |
 Однако для работы на протяжении длительного времени ему требуется хорошее охлаждение.
Однако для работы на протяжении длительного времени ему требуется хорошее охлаждение.
 Хотя расчёты по данной формуле могут давать небольшую погрешность, но это не сильно влияет на работу двигателя.
Хотя расчёты по данной формуле могут давать небольшую погрешность, но это не сильно влияет на работу двигателя. Единственным их недостатком являются то, что они имеют сравнительно большие габариты при небольшой ёмкости.
Единственным их недостатком являются то, что они имеют сравнительно большие габариты при небольшой ёмкости.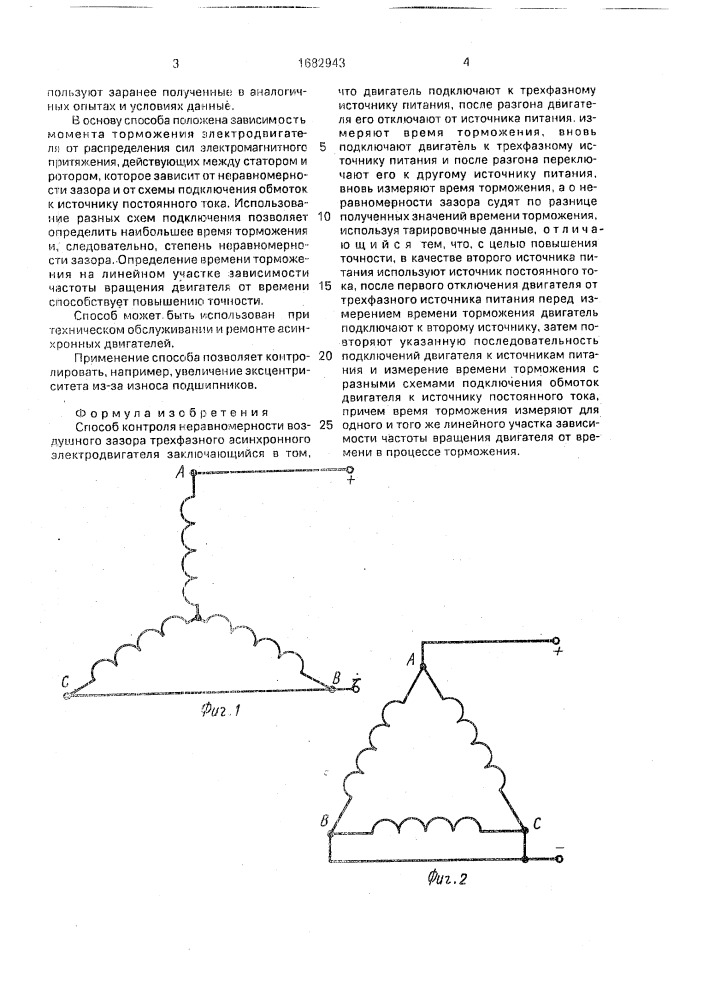 При параллельном соединении ёмкости складываются. Например, чтобы получить ёмкость 20 микрофарад нужно соединить параллельно два конденсатора по 10 микрофарад.
При параллельном соединении ёмкости складываются. Например, чтобы получить ёмкость 20 микрофарад нужно соединить параллельно два конденсатора по 10 микрофарад.
 Если такой возможности нет, нужно купить инверторный преобразователь. Хотя такой преобразователь стоит достаточно дорого, при длительной эксплуатации он окупит себя.
Если такой возможности нет, нужно купить инверторный преобразователь. Хотя такой преобразователь стоит достаточно дорого, при длительной эксплуатации он окупит себя. Такое вынужденное решение можно принять только до приобретения однофазного электродвигателя или подводки сети трехфазного тока.
Такое вынужденное решение можно принять только до приобретения однофазного электродвигателя или подводки сети трехфазного тока. При пуске вхолостую пусковой кондецсатор Сп можно не применять. Рабочее напряжение конденсаторов
При пуске вхолостую пусковой кондецсатор Сп можно не применять. Рабочее напряжение конденсаторов
 Таким образом, электрическая энергия преобразуется в механическую.
Таким образом, электрическая энергия преобразуется в механическую. Данный метод применим только к отечественным трехфазным электрическим двигателям.
Данный метод применим только к отечественным трехфазным электрическим двигателям.


§ 16.3. Работа трехфазного асинхронного двигателя от однофазной сети
Трехфазный
асинхронный двигатель может быть
использован для работы от однофазной
сети. В этом случае такой двигатель
включают как конденсаторный по одной
из схем рис. 16.9.
Значение
рабочей емкости Сраб
(мкФ) при частоте переменного тока
50 Гц можно ориентировочно определить
по одной из формул: для схемы, изображенной
на рис. 16.9 а,
Cpa6
≈ 2700
I1/
Uc;
(16.6)
на
рис. 16.9,
б
Cpa6
≈ 2800 I1/
Uc;
(16.7)
на
рис. 16.9,
в
Cpa6
≈ 4800 I1/
Uc;
(16.8)
Здесь
I1
— номинальный (фазный) ток в обмотке
статора, А; Uс
— напряжение однофазной сети, В.
При подборе рабочей
емкости необходимо следить за тем,
чтобы ток в фазных обмотках статора при
установившемся режиме работы не
превышал номинального значения.
Рис 16.9. Схемы
соединения обмотки статора трехфазного
асинхронного двигателя при включении
его в однофазную сеть
Если
пуск двигателя происходит при значительной
нагрузке на валу, то паралелльно рабочей
емкости Сраб
следует включить пусковую емкость
Сп
= (2,5÷З,0)Сра6.
(16.9)
В
этом случае пусковой момент становится
равным номинальному. При необходимости
дальнейшего увеличения пускового
момента следует принять еще большее
значение пусковой емкости (Сп
≤ 8Сра6).
Большое
значение для надежной работы асинхронного
двигателя в качестве конденсаторного
имеет правильный выбор конденсатора
по напряжению. Следует иметь в виду, что
габариты и стоимость конденсаторов
определяются не только их емкостью, но
и рабочим напряжением. Поэтому выбор
конденсатора с большим “запасом” по
напряжению ведет к неоправданному
увеличению габаритов и стоимости
установки, а включение конденсаторов
на напряжение, превышающее допустимое
рабочее напряжение, приводит к
преждевременному выходу из строя
конденсаторов, а следовательно, и всей
установки.
При
определении напряжения на конденсаторе
при включении
двигателя
по одной из рассмотренных схем необходимо
иметь в виду
следующее:
при включении двигателя по схеме рис.
16.9, а
напряжение
на конденсаторе равно UK
≈
1,3 UС,
а при включении
двигателя
по схемам рис. 16.9, б и в это напряжение
равно Uк
≈
1,15 Uc.
В
схемах конденсаторных двигателей обычно
применяют бумажные конденсаторы в
металлическом герметичном корпусе
прямоугольной формы типов КБГ — МН или
БГТ (термостойкие). На корпусе конденсатора
указаны емкость и рабочее напряжение
постоянного тока. При включении такого
конденсатора в сеть переменного тока
следует уменьшить примерно в два раза
допустимое рабочее напряжение.
Например, если на конденсаторе указано
напряжение 600 В, то рабочее напряжение
переменного тока следует считать
300 В.
Пример
16.1.
Определить значение рабочей емкости
Сраб,
необходимой для работы трехфазного
асинхронного двигателя типа АВ052-4 от
однофазной сети напряжением Uc
= 220
В. Номинальные данные двигателя: Рном
= 80
Вт, напряжение 220/380 В, ток сети I1ном
= 0,56/0,32 А.
Решение.
Напряжение сети 220 В соответствует
соединению обмотки статора в треугольник,
поэтому принимаем схему включения
двигателя в однофазную сеть по рис.
16.9, в.
Номинальный
(фазный) ток статора I1
= 0,32
А.
Рабочая
емкость по (16.8) Срa6
= 4800 • 0,32/220 = 6,98 мкФ. При этом рабочее
напряжение конденсатора Uк
≈ 1,15•220 = 250 В. Принимаем в качестве Сраб
батарею из двух параллельно соединенных
конденсаторов типа КБГ—МН емкостью
по 4 мкФ каждый (емкость батареи 8 мкФ)
на рабочее напряжение 600 В.
трехфазный асинхронный двигатель
трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель
трехфазный асинхронный двигатель питается от системы трехфазного
напряжений, то есть трех напряжений, которые смещены друг от друга на 120.
Звезда напряжения трехфазной системы |
Напряжение питания трехфазной системы 400 В в
действующее значение, при частоте f = 50 Гц
Неподвижная часть двигателя называется
.
статор, и часть, которая
он может вращать указанный ротор.
На неподвижной части двигателя, статоре, расположены три
двойные
обмоток
, которые расположены
относительно друг друга на 120.
трехфазный асинхронный двигатель |
Эти
обмоток
питаются от трехфазных напряжений; поэтому покрываются определенным
ток, и это происходит в переменном магнитном поле, создаваемом каждым из
три обмотки
.В области между тремя витками
магнитное поле будет суммой трех магнитных полей трех
обмоток
.
Но так как
обмоток
соединены на статоре механическим углом 120, а также
трехфазная система напряжений также не в фазе от электрической точки
поля зрения на угол, равный 120 электрическим градусам, найденное магнитное поле
не будет фиксированным, но будет изменчивым; это магнитное поле вращается вокруг
ось двигателя с фиксированной частотой:
f
= 50 Гц
Это магнитное поле называется
вращающееся магнитное поле
Если в пределах этих
обмоток
поставить
короткое замыкание другой обмотки на роторе из-за магнитного потока, который
соединены с обмотками ротора, создается индуцированная электродвижущая сила,
Закон Фарадея, противоположный причине, которая породила.
короткозамкнутый ротор |
Так как обмотки на роторе делать надо короче
цепи и, следовательно, должен выдерживать большой ток, должен иметь высокое сечение, для
алюминиевые стержни предпочтительно размещать вокруг ферромагнитного сердечника.
материал, состоящий из слоев кремния.
Таким образом закрытые алюминиевые стержни
короткое замыкание ведет себя как набор из нескольких витков, каждый из которых имеет приподнятый участок,
чтобы выдерживать большие токи короткого замыкания.Эти токи возникают из-за напряжения, которое
генерируется в стержнях по закону Фарадея, поскольку магнитное поле
генерируемая статором переменная.
Эти токи порождают еще один вращающийся
магнитное поле, создаваемое на роторе;
это магнитное поле имеет направление, противоположное
который генерируется статором.
Следовательно, ротор, в отличие от магнитного
поле статора вынуждено начинать движение, а затем вращаться с тем же
скорость вращающегося магнитного поля статора.
Ротор не вращается с постоянной скоростью, т.е.
скорость синхронизма, но замедляется при изменении нагрузки;
так что двигатель не синхронный, но
asynchronous сказал, что не соблюдает синхронную скорость, установленную
статор.
Действительно, синхронная скорость вращающегося магнитного поля
статора в случае однополюсной пары ротора:
n s = 60 f
где
n с
— количество оборотов
в минуту, это синхронная скорость, и
f — частота.
Ротор вращается со скоростью менее
n с
;
обозначим
n r
скорость ротора.
Учитывайте разницу:
n s
— н г
, то есть разница между скоростью вращения магнитного поля
скорость статора и ротора;
сравним теперь с синхронной скоростью, то есть
скорость, которую должен был иметь ротор, если бы он был синхронизирован с
статор; так как
мы хотим провести сравнение в процентах или относительно, мы должны указать
знаменатель доли синхронной скорости, которая должна была быть
реальный ротор;
тогда получаем следующее соотношение:
, где отношение
s это
сказал промах,
означает, что ротор течет, то есть теряет обороты относительно
статор;
n s
— скорость в оборотах на
минута магнитного поля статора;
n r
— скорость ротора.
поскользнуться
с
является безразмерным числом и изменяется от 0 до 1.
Если
s равно 0 означало бы
что ротор будет в идеальном синхронизме, что у него будет одинаковая скорость
вращающегося магнитного поля
n s
.
На самом деле, если бы было
n r = n s
тогда
п с
— n r = 0
Если все же слип
s это
1 означает, что ротор неподвижен.
Фактически ротор стационарный означает:
н г
= 0
Бланк будет:
Тогда скольжение равно 1, когда ротор неподвижен, то есть
в начале.
промах
никогда не будет равен 0;
на самом деле, если бы он был равен 0, ротор да
достигнет синхронной скорости, но его магнитное поле будет постоянным, а не
переменная, которая будет меньше для электродвижущей силы, индуцированной в роторе,
согласно закону Фарадея и, следовательно, будет меньше тока ротора и
мотор остановится.
Механическая характеристика
Механическая характеристика отображает тенденцию крутящего момента
T как функция скорости вращения ротора
n r
| механический характеристика асинхронного двигателя |
Механический элемент также может
представляют собой функцию скольжения
s;
запомни этот промах
= 1 означает, что двигатель остановлен;
прокрутка равная нулю означает, что скорость максимальная, затем почти равная
к синхронизму.
механический |
Эта функция сообщает нам, что когда двигатель работает на высокой
скорость, то есть близкая к синхронной скорости
n s
крутящий момент очень
высоко; в этом
случай скольжения почти равен нулю.
Однако, когда slpi увеличивается и достигает значения 1,
крутящий момент двигателя уменьшается, и двигатель замедляется;
поэтому нам нужно предотвратить моторные функции в
раздел a-b,
что является нестабильной чертой; по факту,
в этом разделе при увеличении механической нагрузки двигатель замедляется, что
увеличивает скольжение относительно синхронной скорости, но также уменьшает
крутящий момент, при котором двигатель не сможет увеличить свою скорость, но он
приводит к остановке, так как крутящий момент двигателя уменьшается.
Вместо
0-а — стабильный признак;
Фактически, чем выше нагрузка на растяжку
0-а правда, что увеличивает
поток, а затем двигатель замедляется, но также увеличивает крутящий момент, для
которым асинхронный двигатель способен выдерживать повышенную механическую нагрузку.
Скорость
Скорость двигателя не соответствует синхронизму
:
n s = 60 f
в случае двигателя с одной полярной парой пара является
Полярная обмотка, расположенная на статоре, может генерировать северный и южный полюсы.
Поскольку ротор никогда не достигает
синхронная скорость n с ,
а на самом деле это называется асинхронным, ротор вращается со скоростью ниже, чем
n s
для которого скорость ротора становится
продолжение:
n r =
60 ф (1-с)
, где коэффициент
(1-s) — фактор, который
снижает скорость синхронизма; на самом деле, поскольку это
s изменяется от 0 до 1, также
различия:
(1-с)
изменяется от 0 до 1.
Скольжение малых двигателей при полной нагрузке составляет около 6%;
в то время как в больших двигателях при полной нагрузке падает до
2%.
Эффективность
КПД ч
из
трехфазный асинхронный двигатель мы можем
рассчитать по обычной формуле:
где
его
эффективность,
П р
механическая мощность, используемая на роторе,
P a
потребление электроэнергии на
статор.
Мощность на статоре электрическая и может быть измерена с помощью
ваттметры;
имеющий мощность на ротор механического
можно преобразовать в электрическую мощность, если подсчитать потери, которые
есть, потерянная мощность P p .
Потери мощности связаны с нагревом обмоток.
статора и ротора, за счет эффекта Джоуля, потери в стали из-за
рассеянные магнитные потоки в статоре и в роторе, а также потери
из-за механического трения и охлаждающих вентиляторов.
Если обозначить через
С с p
является
сумма всех потерь, то выходная мощность
ротора будет:
P r
= P a — P p
то есть будет разница между потребляемой мощностью
на статоре
P a
если только
пропала мощность P p .
Следовательно, КПД становится:
КПД низкий для
маленькие двигатели — около 77%, в то время как для больших двигателей она выше и достигает 94%.
Однофазный
асинхронный
двигатель
Для малых мощностей построены однофазные
асинхронные двигатели,
а именно те, которые используют обычное напряжение, присутствующее в жилых домах
между фазой и нейтралью и 240 В и 50 Гц
Однофазный асинхронный двигатель |
Имеется две обмотки;
первая основная обмотка — это та, которая работает на
схема и не может генерировать вращающееся магнитное поле, например, для запуска
мотор;
соответственно потребуется вторая обмотка указанного стартера, предназначенная для
запуск двигателя под нагрузкой.Пусковая обмотка имеет последовательно конденсатор,
который имеет функцию фазового сдвига на 90 ток пускового
обмотка по сравнению с основной обмоткой.
Таким образом, он генерирует вращающийся
магнитное поле, способное запустить двигатель.
После запуска пусковую обмотку можно отсоединить
означает переключатель, который отсоединяется, как только он достигает скорости
система, за счет центробежной силы.
Проф. Пьетро Де Паолис
2014
Курс электроники
Разъяснение профессора электроники
Nuova pagina 1
Электрическая школа
электрическая школа — indice
Запрос информации
Карта типа школы
Индекс всех страниц сайта
Scuola
Elettrica
Разница между однофазным и трехфазным асинхронным двигателем
Однофазный асинхронный двигатель и трехфазный асинхронный двигатель различаются по различным факторам, указанным в этой статье, таким как источник питания, от которого они работают, их пусковой момент, техническое обслуживание, характеристики, эффективность двигателя, их коэффициенты мощности и Пример использования двух двигателей.
Различия между однофазным и трехфазным асинхронным двигателем приведены ниже в виде таблицы.
| BASIS | ОДНОФАЗНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ | ТРЕХФАЗНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Питание | Однофазный асинхронный двигатель использует однофазное питание для своей работы. | Трехфазный асинхронный двигатель работает от трехфазного источника питания. |
| Пусковой момент | Пусковой момент низкий. | Пусковой крутящий момент высокий. |
| Техническое обслуживание | Их легко ремонтировать и обслуживать. | Сложные в ремонте и обслуживании. |
| Характеристики | Простая конструкция, надежная и экономичная по сравнению с трехфазными асинхронными двигателями. | Комплекс в строительстве и дорого. |
| КПД | КПД меньше | КПД высокий |
| Коэффициент мощности | Низкий коэффициент мощности | Высокий коэффициент мощности |
| Примеры | Они в основном используются в бытовых приборах, таких как миксеры, вентиляторы, компрессоры и т. Д. | Трехфазные асинхронные двигатели в основном используются в промышленности. |
Асинхронный двигатель — это асинхронный двигатель, поскольку они не работают с синхронной скоростью. Однофазный асинхронный двигатель работает от однофазного источника питания и не запускается самостоятельно.
Трехфазный асинхронный двигатель работает от трехфазной сети и является самозапускающимся двигателем.
Различия между однофазным и трехфазным асинхронным двигателем заключаются в следующем: —
- Как видно из названия, однофазный асинхронный двигатель использует однофазное питание для своей работы, а трехфазный асинхронный двигатель использует трехфазное питание.
- Пусковой момент однофазного асинхронного двигателя низкий, тогда как пусковой момент трехфазного асинхронного двигателя высокий.
- просты в ремонте и обслуживании, а трехфазные двигатели — сложны.
- просты по конструкции, надежны и экономичны по сравнению с трехфазными асинхронными двигателями.
- КПД однофазного двигателя низкий, тогда как КПД трехфазных асинхронных двигателей высокий.
- Коэффициент мощности однофазного асинхронного двигателя ниже, чем у трехфазного асинхронного двигателя.
- в основном используются в бытовых приборах, таких как миксеры-измельчители, вентиляторы, компрессоры и т. Д. Трехфазные асинхронные двигатели в основном используются в промышленности.
Однофазные двигатели
Однофазные двигатели
Однофазные двигатели
Контроллер трехфазного двигателя переменного тока
Этот проект выполнен с использованием MC3PHAC от NXP Semiconductor. Проект генерирует 6 сигналов PWM для контроллера трехфазного двигателя переменного тока.Очень просто создать профессиональный частотно-регулируемый привод с интеллектуальным модулем питания (IPM) или 3-фазный IGBT / MOSFET с драйвером затвора. Плата обеспечивает 6 сигналов PWM для инвертора IPM или IGBT, а также сигнал торможения. Также эта плата работает в автономном режиме и не требует программирования / кодирования.
MC3PHAC — это высокопроизводительный монолитный интеллектуальный контроллер двигателя, разработанный специально для удовлетворения требований к недорогим системам управления трехфазными двигателями переменного тока с регулируемой скоростью.Устройство можно адаптировать и настраивать в зависимости от окружающей среды. Он содержит все активные функции, необходимые для реализации части управления трехфазного электродвигателя переменного тока с разомкнутым контуром. Одним из уникальных аспектов этой платы является то, что, несмотря на то, что она адаптируется и настраивается в зависимости от среды, она не требует разработки программного обеспечения. Благодаря этому MC3PHAC идеально подходит для приложений клиентов, требующих управления двигателем переменного тока, но с ограниченными программными ресурсами или без них.
В MC3PHAC включены защитные функции, состоящие из контроля напряжения на шине постоянного тока и входа неисправности системы, который немедленно отключает модуль ШИМ при обнаружении системной неисправности.
Все выходы являются сигналами TTL, входное питание 5-15 В постоянного тока, напряжение на шине постоянного тока должно быть в пределах 1,75-4,75 В, Dip-переключатель предназначен для установки частоты двигателя 60 или 50 Гц, перемычки также помогают установить полярность выходного ШИМ Активный низкий или активный высокий, и это помогает использовать эту плату с любыми модулями IPM, поскольку выход может быть установлен активным низким или высоким. Потенциометр PR2 помогает регулировать скорость двигателя. Чтобы изменить базовую частоту, время простоя ШИМ и другие возможные параметры, обратитесь к таблице данных микросхемы.
Управление скоростью — частоту синхронного двигателя можно задать в реальном времени как любое значение от 1 Гц до 128 Гц, регулируя потенциометр PR2. Коэффициент масштабирования составляет 25,6 Гц на вольт. Вывод SPEED обрабатывается 24-битным цифровым фильтром для повышения стабильности скорости в шумной среде.
Управление ускорением — Ускорение двигателя можно задать в реальном времени в диапазоне от 0,5 Гц / секунду до 128 Гц / секунду, регулируя потенциометр PR1.Коэффициент масштабирования составляет 25,6 Гц / секунду на вольт.
Защита от сбоев : MC3PHAC поддерживает широкий спектр функций защиты и предотвращения сбоев. Если неисправность все-таки происходит, MC3PHAC немедленно отключает ШИМ и ждет, пока состояние неисправности не будет устранено, прежде чем запускать таймер для повторного включения ШИМ. На графике на Рисунке 10 показано значение сопротивления в зависимости от времени повторной попытки из таблицы данных ИС. На рисунке 10 предполагается наличие подтягивающего резистора 6,8 кОм. В автономном режиме этот интервал тайм-аута задается на этапе инициализации путем подачи напряжения на вывод MUX_IN, когда на вывод RETRY_TxD устанавливается низкий уровень.Таким образом, время повтора может быть указано от 1 до 60 секунд с коэффициентом масштабирования 12 секунд на вольт
Внешний мониторинг неисправностей : Контакт FAULTIN принимает цифровой сигнал, указывающий, что неисправность была обнаружена через внешнюю схему контроля. Высокий уровень на этом входе приводит к немедленному отключению ШИМ. Типичными условиями отказа могут быть перенапряжение на шине постоянного тока, перегрузка шины по току или перегрев. Как только этот вход возвращается к низкому логическому уровню, запускается таймер повторной попытки отказа, и ШИМ снова включаются после достижения запрограммированного значения тайм-аута.Входной контакт 9 FLTIN разъема CN3 должен иметь высокий уровень, чтобы на контакте неисправности был низкий уровень для нормальной работы.
Мониторинг целостности напряжения на шине (входной вывод 10 CN3) Вывод DC_BUS контролируется на частоте 5,3 кГц (4,0 кГц, когда частота ШИМ установлена на 15,9 кГц), и любое значение напряжения за пределами допустимого окна составляет состояние неисправности. В автономном режиме пороги окна фиксируются на уровне 4,47 В (128 процентов от номинала) и 1,75 В (50 процентов от номинала), где номинальное значение равно 3.5 вольт. Как только уровень сигнала DC_BUS возвращается к значению в пределах допустимого окна, запускается таймер повторной попытки отказа, и ШИМ снова включаются после достижения запрограммированного значения тайм-аута. Во время включения возможно, что VDD может достичь рабочего напряжения до того, как конденсатор шины постоянного тока зарядится до своего номинального значения. Когда проверяется целостность шины постоянного тока, пониженное напряжение будет обнаружено и рассматриваться как неисправность с соответствующим периодом ожидания. Чтобы предотвратить это, MC3PHAC контролирует напряжение на шине постоянного тока во время включения питания в автономном режиме и ожидает, пока оно не превысит пороговое значение пониженного напряжения, прежде чем продолжить.В это время все функции MC3PHAC приостановлены. Как только этот порог будет достигнут, MC3PHAC продолжит работу в обычном режиме, а любое дальнейшее нарушение напряжения будет считаться неисправностью.
Примечание: Если мониторинг напряжения на шине постоянного тока не требуется, на вывод DC_BUS должно подаваться напряжение 3,5 В ± 5 процентов. Для этого используйте следующие компоненты: R2 должно быть 3,3 кОм, R4 4 К7 Ом, C6 0,1 мкФ и замкнуть перемычку между контактом 1 и контактом 2.
Контроль регенерации — Регенерация — это процесс, при котором механическая энергия, накопленная в двигателе и нагрузке, передается обратно в приводную электронику, обычно в результате агрессивного замедления.В особых случаях, когда этот процесс происходит часто (например, в системах управления двигателями лифтов), экономично включить специальные функции в моторный привод, чтобы эта энергия могла подаваться обратно в сеть переменного тока. Однако в большинстве недорогих приводов переменного тока эта энергия накапливается в конденсаторе шины постоянного тока за счет увеличения его напряжения. Если этот процесс не контролировать, напряжение на шине постоянного тока может вырасти до опасного уровня, что может привести к повреждению конденсатора шины или транзисторов в силовом инверторе. MC3PHAC включает в себя два метода восстановления до того, как это станет проблемой.
Резистивное торможение: Вывод DC_BUS контролируется на частоте 5,3 кГц (4,0 кГц, когда частота ШИМ установлена на 15,9 кГц), и когда напряжение достигает определенного порога, на выводе RBRAKE устанавливается высокий уровень. Этот сигнал может использоваться для управления резистивным тормозом, установленным на конденсаторе шины постоянного тока, так что механическая энергия двигателя будет рассеиваться в виде тепла в резисторе, а не накапливаться в виде напряжения на конденсаторе. В автономном режиме порог DC_BUS, необходимый для подтверждения сигнала RBRAKE, фиксирован на 3.85 вольт (110 процентов от номинала), где номинал определен как 3,5 вольт.
Выбираемая частота ШИМ: MC3PHAC поддерживает четыре дискретных частоты ШИМ и может динамически изменяться во время работы двигателя. Этот резистор может быть потенциометром или постоянным резистором в диапазоне, указанном в таблице. В автономном режиме частота ШИМ задается путем подачи напряжения на вывод MUX_IN, когда вывод PWM FREQ_RxD переводится в низкий уровень. В таблице 4 из таблицы данных показаны требуемые уровни напряжения на выводе MUX_IN и соответствующая частота ШИМ для каждого диапазона напряжений.
- PR1: Потенциометр для установки ускорения
- PR2: Потенциометр регулировки скорости
- SW1: DIPX4-переключатель для установки частоты 60 Гц / 50 Гц, а также активного низкого / активного высокого выходного сигнала
- SW2: Переключатель сброса
- SW3: Пуск / остановка двигателя
- SW4: Изменение направления двигателя по часовой / против часовой стрелки
- CN1: Вход питания постоянного тока 7-15 В постоянного тока
- CN2: Подача напряжения на шину от модуля IPM / IGBT для защиты от повышенного / пониженного напряжения
- CN3: Интерфейс между модулем IPM / платой IGBT обеспечивает выход 6PWM, отключение тормоза и вход неисправности
- PCB имеет область прототипа, которую можно использовать для разработки.
Характеристики
- Питание 7-15 В постоянного тока
- Потенциометр для управления скоростью двигателя
- Частота ШИМ по умолчанию 10,582 кГц, можно регулировать в диапазоне (5,291 кГц — 164 кГц)
- Потенциометр для регулировки ускорения
- Ползунковый переключатель для управления направлением
- Ползунковый переключатель Пуск / Стоп
- 6 выходных сигналов ШИМ
- Мертвое время по умолчанию 4.5 мкс
- Время повтора ошибки 32,8 секунды
- Вход VBS (обратная связь по напряжению шины) под контролем напряжения
- Неисправность (вход перегрузки по току или короткого замыкания)
- Регулировка скорости вольт на герц
- Фильтрация цифровой обработки сигналов (DSP) для повышения стабильности скорости
- 32-битные вычисления для высокоточной работы
- Доступен Интернет
- Для работы не требуется разработка программного обеспечения
- Широтно-импульсный модулятор (ШИМ) с 6 выходами
- Генерация трехфазных сигналов
- 4-канальный аналого-цифровой преобразователь (АЦП)
- Настраивается пользователем для автономной работы
- Динамическое подавление пульсации шины
- Выбор полярности и частоты ШИМ
- Выбор базовой частоты 50/60 Гц
- Генератор системы на основе фазовой автоподстройки частоты (ФАПЧ)
- Схема обнаружения низкого напряжения питания
- В состав MC3PHAC входят защитные функции, состоящие из контроля напряжения на шине постоянного тока и системы
- Вход неисправности, который немедленно отключает модуль ШИМ при обнаружении системной ошибки.
Некоторые целевые приложения для MC3PHAC включают
- Двигатели HVAC малой мощности
- Бытовая техника
- Коммерческие прачечные и посудомоечные машины
- Управление процессами
- Насосы и вентиляторы
Схема
Список деталей
Подключения
Настройки DIP-переключателя
Блок-схема
Фото
Видео
MC3PHAC Лист данных
MC3PHAC
Модель динамики трехфазной асинхронной машины,
также известна как индукционная машина
и частота
Номинальная полная мощность Pn (ВА), среднеквадратичное линейное напряжение
Vn (В) и частота fn (Гц).По умолчанию: [3730 460 60] для
единицы о.е. и [1.845e + 04 400 50] для единиц СИ.
Сопротивление статора Rs (Ω или pu) и индуктивность рассеяния
Lls (H или pu). По умолчанию [0,01965 0,0397] для
единицы о.е. и [0,5968 0,0003495] для единиц СИ.
Сопротивление ротора Rr ‘(Ом или pu) и индуктивность рассеяния
Llr ‘(H или pu) оба относятся к статору.Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлено значение Wound или Squirrel-cage .
По умолчанию [0,01909 0,0397] для единиц о.е. и [0,6258 для единиц СИ.
0,005473]
Сопротивление ротора Rr1 ‘(Ом или pu) и индуктивность рассеяния
Llr1 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлен на Двойная беличья клетка .По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4155 для единиц СИ.
0,002066]
Сопротивление ротора Rr2 ‘(Ом или pu) и индуктивность рассеяния
Llr2 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0.4168 для единиц СИ.
0,0003495]
Намагничивающая индуктивность Lm (H или pu). По умолчанию 1,354 для
единицы о.е. и 0,0354 для единиц СИ.
пары полюсов
Для диалогового окна единиц СИ :
комбинированный коэффициент инерции машины и нагрузки J (кг.м 2 ),
комбинированный коэффициент вязкого трения F (Н.м.с) и пары полюсов p.Момент трения Tf пропорционален скорости вращения ротора ω
(Tf = F.w). По умолчанию [0,05 0,005879 2] .
Для диалогового окна о.е. единиц :
постоянная инерции H (s), комбинированный коэффициент вязкого трения
F (pu), а пары полюсов p. По умолчанию [0,09526 0,05479 2] .
Задает начальное скольжение s, электрический угол Θe (градусы),
величина тока статора (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs ]
Если параметр Тип ротора установлен на Обмотка ,
вы также можете указать необязательные начальные значения для тока ротора
величина (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs , i ar , i br , i cr , фаза ar , фаза br , фаза cr ]
Когда параметр Тип ротора установлен на Беличья клетка ,
начальные условия могут быть вычислены с помощью инструмента Load Flow или
Инструмент инициализации станка в блоке Powergui.
По умолчанию [1,0 0,0,0 0,0,0] для пу
единиц и [0 0 0 0 0 0 0 0] для единиц СИ.
Определяет наличие магнитного насыщения ротора и статора.
железо моделируется или нет. По умолчанию очищено.
Задает параметры кривой насыщения без нагрузки. Магнитный
насыщение железа статора и ротора (насыщение взаимного
поток) моделируется кусочно-линейной зависимостью, определяющей точки
кривой насыщения без нагрузки.Первая строка этой матрицы содержит
значения токов статора. Вторая строка содержит значения соответствующих
клеммы напряжения (напряжения статора). Первая точка (первый столбец
матрицы) должно отличаться от [0,0]. Эта точка соответствует
до точки, где начинается эффект насыщения. По умолчанию: [0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763 для единиц PU и
; 0,5,0,7,0,9,1,1,1,1,2, 1,3,1,4,1,5] [14.03593122,
27.81365428, 53.79336849, 72.688
302.9841135, 428.7778367; 230, 322, 414, 460, 506, 552, 598, 644,
690] для единиц СИ ..
Вы должны выбрать Simulate saturation check
коробка для имитации насыщенности. Если вы не выберете Simulate
флажок насыщения , связь между статором
ток и напряжение статора линейны.
Щелкните График , чтобы просмотреть указанную без нагрузки
кривая насыщения.
Трехфазный синхронный двигатель
Трехфазный синхронный двигатель — это уникальный и специализированный двигатель.Как следует из названия, этот двигатель работает с постоянной скоростью от холостого хода до полной нагрузки синхронно с частотой сети. Как и в асинхронных двигателях с короткозамкнутым ротором, скорость синхронного двигателя определяется количеством пар полюсов и частотой сети.
Функцию типичного трехфазного синхронного двигателя можно резюмировать следующим образом:
- На обмотки статора подается трехфазное переменное напряжение и создается вращающееся магнитное поле.
- На обмотку ротора подается постоянное напряжение, и создается второе магнитное поле.
- Затем ротор действует как магнит и притягивается вращающимся полем статора.
- Это притяжение создает крутящий момент на роторе и заставляет его вращаться с синхронной скоростью вращающегося поля статора.
- Ротор не требует магнитной индукции от поля статора для своего возбуждения. В результате двигатель имеет нулевое скольжение по сравнению с асинхронным двигателем, которому требуется скольжение для создания крутящего момента.
Синхронные двигатели не запускаются автоматически и поэтому требуют способа доведения ротора до почти синхронной скорости перед подачей питания постоянного тока на ротор. Синхронные двигатели обычно запускаются как обычные асинхронные двигатели с короткозамкнутым ротором за счет использования специальных амортизирующих обмоток ротора. Также существует два основных метода подачи тока возбуждения на ротор. Один из способов — использовать внешний источник постоянного тока с током, подаваемым на обмотки через контактные кольца. Другой способ — установить возбудитель на общий вал двигателя.Такое расположение не требует использования контактных колец и щеток.
Отстающий коэффициент мощности электрической системы можно скорректировать путем перевозбуждения ротора синхронного двигателя, работающего в той же системе. Это создаст опережающий коэффициент мощности, нейтрализуя отстающий коэффициент мощности индуктивных нагрузок. Недовозбужденное поле постоянного тока создает запаздывающий коэффициент мощности и по этой причине редко используется. Когда поле нормально возбуждено, синхронный двигатель будет работать с единичным коэффициентом мощности.Трехфазные синхронные двигатели могут использоваться для коррекции коэффициента мощности, в то же время выполняя важную функцию, такую как работа компрессора. Однако, если выходная механическая мощность не требуется или может быть обеспечена другими экономически эффективными способами, синхронная машина остается полезной в качестве «немоторного» средства управления коэффициентом мощности. Он выполняет ту же работу, что и батарея статических конденсаторов. Такая машина называется синхронным конденсатором или конденсатором.
Асинхронные асинхронные двигатели — электрические характеристики
Приведенную ниже таблицу можно использовать для определения электрических параметров асинхронных асинхронных двигателей 380 Voltage .
380 Напряжение 50 Гц Двигатели обычно используются в Европе. Обратите внимание, что номинальное напряжение существующих систем 220/380 В и 240/415 В изменяется до рекомендованного МЭК значения 230/400 В .
| Номинальная мощность | Номинальный ток — I n — (A) | Непосредственный предохранитель (A) | Звезда — треугольник (A) Контактор звезда — треугольник — I n — (A) | Автоматический выключатель — I n — (A) | ||
|---|---|---|---|---|---|---|
| кВт л.с. | ||||||
| 0.2 | 0,3 | 0,7 | 2 | 2 | 16 | |
| 0,33 | 0,5 | 1,1 | 2 | 2 | 16 | |
| 0,5 | 0,7 | 1,4 | 2 | 2 | 16 | |
| 0,8 | 1,1 | 2,1 | 4 | 4 | 16 | |
| 1.1 | 1,5 | 2,6 | 4 | 4 | 16 | |
| 1,5 | 2 | 3,6 | 6 | 4 | (16) 22 | 16 |
| 2,2 | 3 | 5,0 | 10 | 6 | (16) 22 | 16 |
| 3 | 4 | 6,6 | 16 | 10 | (16) 22 | 16 |
| 4 | 5.5 | 8,5 | 20 | 16 | (16) 22 | 16 |
| 5,5 | 7,5 | 11,5 | 25 | 20 | (16) 22 | 16 |
| 7,5 | 10 | 15,5 | 35 | 25 | (25) 22 | 25 |
| 11 | 15 | 22,2 | 35 | 35 | (40) 30 | 40 |
| 15 | 20 | 30 | 50 | 35 | (40) 30 | 40 |
| 22 | 30 | 44 | 63 | 50 | (63) 60 | 60 |
| 30 | 40 | 57 | 80 | 63 | (63) 60 | 60 |
| 45 | 66 | 85 | 125 | 100 | 90 | 100 |
| 55 | 75 | 104 | 160 | 125 | 110 | 100 |
| 75 | 100 | 140 | 200 | 160 | 150 | 200 |
| 90 | 125 | 168 | 225 | 200 | 220 | 200 |
| 110 | 150 | 205 | 300 | 250 | 220 | 200 |
| 132 | 180 | 245 | 400 | 300 | 300 | 400 |
| 160 | 220 | 290 | 430 | 300 | 300 | 400 |
| 200 | 270 | 360 | 500 | 480 | 400 | |
| 240 | 325 | 430 | 630 | 500 | 480 | 480 |
Пускатели односкоростного двигателя с полным напряжением
Полное напряжение пускатели (ручные и магнитные) подают полное напряжение непосредственно на клеммы двигателя.