2.2. Статические характеристики систем управления [7]. Статические и статические системы
Система статическая - Справочник химика 21
При соединении элементов в систему статическая характеристика последней будет в значительной мере зависеть от свойств этих элементов. Так, наличие в системе статического или изодром-ного (астатического) регулятора проявляется в различии статических характеристик всей системы автоматического регулирования (см. рис. 1.5, б). [c.28]В дальнейшем будем рассматривать так называемые замкнутые системы, т, е. фиксированный (известный к началу организации процесса) набор выпускаемых продуктов (система статического типа). Все задачи теории расписаний классифицируются следующим образом А В С 0, где Л — число производимых на установке продуктов 5 — число аппаратов в [c.296]
Сосуды с и-образными рубашками. Наиболее характерно для такой конструкции то, что действующее на днище рубашки давление Ра вызывает в ней осевую силу Q , которая должна быть воспринята коническими или кольцевыми сопряжениями. При этом система статически неопределима, так как рубашка соединена с сосудом не только в месте конического перехода, но и у днища. Однако с допуском в сторону запаса действием давления на днище сосуда можно пренебречь (рис. 4.16) тогда [c.257]Различают два типа систем оптимального управления с применением вычислительных машин — системы динамического и статического действия. Системы динамического действия возлагают на управляющую машину все функции управления. В этом случае требуется полное математическое описание процесса с учетом динамических свойств объекта. Система статического действия предусматривает сохранение стабилизирующих регуляторов и возлагает на управляющую вычислительную машину лишь коррекцию заданных значений параметров с целью оптимизации режима. Этот тип проще и надежнее, так как при неисправности машины она отключается, а управление процессом сохраняется при помощи стабилизирующих регуляторов на тех же зафиксированных значениях параметров, которые были до повреждения вычислительной машины. [c.365]
Срок окупаемости реальной СДО по сравнению с системой статической оптимизации оценивается по формуле [c.203]
Определение срока окупаемости системы статической оптимизации [c.211]
Таким образом, сумма вторых производных энергии по координатам и в этом случае равна нулю. Следовательно, все эти производные одновременно не могут быть больше нуля — одна или две будут меньше нуля, а это означает, что система статических зарядов ие может быть устойчивой. [c.12]
Представляют интерес системы статической и динамической оптимизации с применением адаптивных моделей (рис. 1-29). В этих случаях математическое описание получают методами математической статистики, отработав экспериментальные данные, характеризующие зависимость между входными и выходными величинами. Особенность адаптивных моделей заключается [c.73]
Для запуска агрегатов ГАЭС в насосный режим предусмотрена система статического преобразователя частоты мощностью 25 МВт. При этом после пуска и синхронизации агрегата статический преобразователь можно сразу же отключить и использовать для запуска следующего агрегата. Характерной особенностью является также и то, что статический преобразователь можно использовать и для динамического торможения агрегата вплоть до полной остановки, что повышает надежность работы станции. [c.36]
Полезно заметить, что при астатическом объекте (vj ф 0), но статическом регуляторе (vj = 0), как показывает формула (5.85), постоянное возмущающее воздействие создает в системе статическую ошибку, которая не возникает, если объект статический (vx = 0), а регулятор астатический (vj Ф 0). [c.158]
Указанное свойство системы можно обобщить следующим правилом для устранения в системе статической ошибки по какому-либо воздействию интегрирующее звено необходимо включать до места приложения этого воздействия. [c.158]
В результате проектирования автоматизированной установки диазотирования были найдены оптимальные конструктивные параметры N = 5, Vi= 14 л, 1=1,5. Наиболее эффективной системой управления оказалась система статической оптимизации степень конверсии в случае применения ССО на 2,S выше, чем при использовании лучшей АСР. Срок окупаемости ССО составляет 0,02 года. [c.53]
В случае системы статического типа скорость откачки в начале трубопровода, ведущего к откачиваемому объему, может быть небольшой, так как проводимость трубопровода мала и нет расчета ставить насос с большой скоростью откачки. [c.16]
Такой многоканальный привод описывается системой статических уравнений [c.205]
В процессах рециркуляции изменение состава потоков должно происходить по замкнутому пути. Исследование статики составов при подводе и отводе потоков проводят путем составления системы статических характеристик. Составы смесей в точках схемы процесса до и после сложения или вычитания потоков можно опреде- [c.313]
Пусть В — ограниченное тело, границы дВ которого нагружены заданной системой статических поверхностных нагрузок Г , а 5 , й — компоненты тензора напряжений [c.124]
Изучение различных препаратов NiO в нашей системе статическим методом с использованием масс-спектрометра для наблюдения за изменением состава газа показало [32], что при низких давлениях N2O (1—5 см) разложение над хорошо обез-гаженными окислами следует простому закону первого порядка по крайней мере до 50% превращения некоторое отравление кислородом имеет место перед окончанием реакции и более заметно в реакциях с более высокими начальными давлениями N2O. Для изучения десорбции газов с катализатора реакцию прерывали до ее завершения, быстро откачивали до давления 10 мм, отключали насосы и затем продолжали откачивание, соединив непосредственно реактор через кран В5 с источником ионов масс-спектрометра, минуя капиллярный отвод (см. рис. 1). На рис. 13 показаны типичные данные, из которых следует, что как О2, так и N2O хемосорбируются на окисле и могут быть десорбированы в неизменном виде при нагревании аналогичные результаты получены на многих катализаторах . Поэтому наиболее вероятно, что первой стадией разложения является [c.283]
В первом случае имеем так называемые системы статического регулирования, в которых в установившемся состоянии существует однозначная зависимость между регулируемой величиной и положением регулирующего органа (нагрузкой). [c.387]
Натяжения, возникающие в нитях, которые составляют крученую пряжу, аналитически могут быть определены лишь для случая крутки из двух нитей. Если же крученая пряжа составлена из трех и более нитей, то система статически неопределенна. В резино-текстильных изделиях нити работают не одиночно, а группами. При параллельном расположении нитей возможны два случая [7] нити в группе свободны и нити в группе конструктивно связаны между собой. Первый случай соответствует работе нитей в каркасах рукавов, изготовленных обмоткой или же навивкой, или работе корда в каркасах автопокрышки. Второй случай соответствует работе нитей, соединенных в ткань или оплетку. [c.57]
Vq—объем смеси на 1 кг сухого воздуха в м /кг, hem == S— сопротивление системы (статическое) в мм вод. ст. уу [c.361]
Теорема 2. Если консервативная система статически неустойчива, то добавлением собственно-неконсервативных сил (без дис- [c.41]
Теорема 2, Если консервативная система статически устойчива, то добавление собственно-неконсервативных сил (без диссипативных и гироскопических) может сделать систему неустойчивой. [c.42]
Соотношение (5.88) показывает, что при отсутствии в системе интегрирующих звеньев (разомкнутая система — статическая) постоянные воздействия и /о вызывают постоянную установив-щуюся ошибку (,, которую называют статической. Эта ошибка будет тем меньше, чем больше коэффициент-усиления К. системы, причем для уменьшения статической ошибки, вызываемой возмущающим воздействием, следует для увеличения К увеличивать коэффициент /Са регулятора, а не К объекта. [c.158]
Система статической оптимизации обдеркит блоки проверки адекватности модели, идентификации с помощью модели неконтролируемых возмущений и оптимизации режимов. Постановка задачи оптимизации такова мя заданного вектора f = СУ (го> [сЛя") находится и = (6 , Т , такой, что функция (степень конверсии или производительность установки") достигает максимума [c.52]
Наличие крупных пор (радиус сотни и тысячи ангстрем) весьма полезно в адсорбентах, используемых для очистки и осушки масел. В системах статической адсорбции оптимальный радиус пор выбирается в соотвествии с заданной равновесной относительной концентрацией адсорбтива в окружающей среде. [c.101]
Определение изотерм адсорбции для двухкомпонентной системы статическим методом, без применения фронтального анализа, представляет значительные трудности. [c.16]
В результате изучения этой системы статическим методом Флинт и Уэл получили диаграмму рав- [c.542]
Представляют интерес системы статической и динамической оптимизации с применением адаптивны хмоделей (рис. 1-30). В этих случаях математическое описание получают методами математической статистики, отработав экспериментальные данные, характеризующие зависимость между входными и выходными величинами. Особенность адаптивных моделей заключается в том, что-их коэффициенты вычисляются снова после каждого очередного изменения выходной величины с помощью методов регрессионного анализа. Полученные данные рассматриваются как источник до- [c.90]
Натяжения, возникающие в нитях, составляющих крученук> пряжу, аналитически могут быть определены лишь для случая крутки из двух нитей (рис. 165). Если же крученая пряжа составлена из трех и более нитей, то система статически неопределенна. В резино-текстильных изделиях нити работают не одиночно, [c.318]
Уравнение (3.109) аналогично уравнению колебаний подпружиненной массы 1а с коэффициентом скоростного трения Ь и жесткостью пружины d. Равновесный режим, по уравнению (3.109) статически устойчив, если жесткость d положительна, т.е. если к>Р. Этот вывод Пвлу-чен ранее из геометрических соображений для точки О (рис. 3.60). Ёслй жесткость d отрицательна, т.е. к[c.111]
Пусть d>0, т.е. система статически устойчива. Система, описы1рае-мая уравнением (3.109), будет устойчива также и динамически, если [c.111]
Система статических показателей энергетики мира. — М. МТЭА, ИЭИ, 1993. [c.321]
chem21.info
Статические и астатические системы управления СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ
 Статические и астатические системы управления СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ СИСТЕМЫ
Статические и астатические системы управления СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ СИСТЕМЫ
 В ЗАВИСИМОСТИ ОТ ПРИНЦИПА И ЗАКОНА ФУНКЦИОНИРОВАНИЯ ЗУ, ЗАДАЮЩЕГО ПРОГРАММУ ИЗМЕНЕНИЯ ВЫХОДНОЙ ВЕЛИЧИНЫ, РАЗЛИЧАЮТ ОСНОВНЫЕ ВИДЫ САУ: СИСТЕМЫ СТАБИЛИЗАЦИИ, ПРОГРАММНЫЕ, СЛЕДЯЩИЕ И САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ, СРЕДИ КОТОРЫХ МОЖНО ВЫДЕЛИТЬ ЭКСТРЕМАЛЬНЫЕ, ОПТИМАЛЬНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ. В СИСТЕМАХ СТАБИЛИЗАЦИИ (РИС. 9, 10) ОБЕСПЕЧИВАЕТСЯ НЕИЗМЕННОЕ ЗНАЧЕНИЕ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ ПРИ ВСЕХ ВИДАХ ВОЗМУЩЕНИЙ, Т. Е. Y(T) = CONST. ЗУ ФОРМИРУЕТ ЭТАЛОННЫЙ СИГНАЛ, С КОТОРЫМ СРАВНИВАЕТСЯ ВЫХОДНАЯ ВЕЛИЧИНА. ЗУ, КАК ПРАВИЛО, ДОПУСКАЕТ НАСТРОЙКУ ЭТАЛОННОГО СИГНАЛА, ЧТО ПОЗВОЛЯЕТ МЕНЯТЬ ПО ЖЕЛАНИЮ ЗНАЧЕНИЕ ВЫХОДНОЙ ВЕЛИЧИНЫ.
В ЗАВИСИМОСТИ ОТ ПРИНЦИПА И ЗАКОНА ФУНКЦИОНИРОВАНИЯ ЗУ, ЗАДАЮЩЕГО ПРОГРАММУ ИЗМЕНЕНИЯ ВЫХОДНОЙ ВЕЛИЧИНЫ, РАЗЛИЧАЮТ ОСНОВНЫЕ ВИДЫ САУ: СИСТЕМЫ СТАБИЛИЗАЦИИ, ПРОГРАММНЫЕ, СЛЕДЯЩИЕ И САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ, СРЕДИ КОТОРЫХ МОЖНО ВЫДЕЛИТЬ ЭКСТРЕМАЛЬНЫЕ, ОПТИМАЛЬНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ. В СИСТЕМАХ СТАБИЛИЗАЦИИ (РИС. 9, 10) ОБЕСПЕЧИВАЕТСЯ НЕИЗМЕННОЕ ЗНАЧЕНИЕ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ ПРИ ВСЕХ ВИДАХ ВОЗМУЩЕНИЙ, Т. Е. Y(T) = CONST. ЗУ ФОРМИРУЕТ ЭТАЛОННЫЙ СИГНАЛ, С КОТОРЫМ СРАВНИВАЕТСЯ ВЫХОДНАЯ ВЕЛИЧИНА. ЗУ, КАК ПРАВИЛО, ДОПУСКАЕТ НАСТРОЙКУ ЭТАЛОННОГО СИГНАЛА, ЧТО ПОЗВОЛЯЕТ МЕНЯТЬ ПО ЖЕЛАНИЮ ЗНАЧЕНИЕ ВЫХОДНОЙ ВЕЛИЧИНЫ.
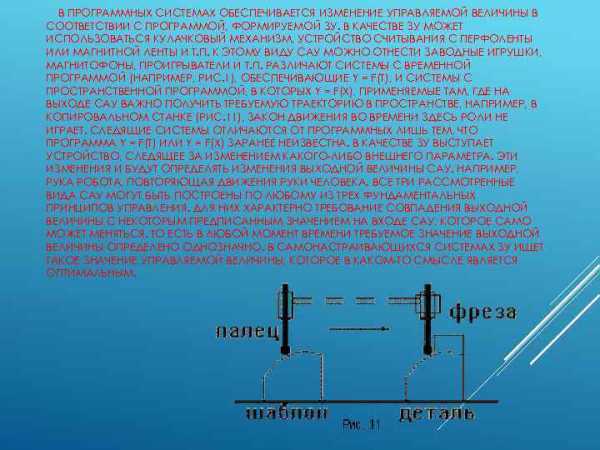 В ПРОГРАММНЫХ СИСТЕМАХ ОБЕСПЕЧИВАЕТСЯ ИЗМЕНЕНИЕ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ В СООТВЕТСТВИИ С ПРОГРАММОЙ, ФОРМИРУЕМОЙ ЗУ. В КАЧЕСТВЕ ЗУ МОЖЕТ ИСПОЛЬЗОВАТЬСЯ КУЛАЧКОВЫЙ МЕХАНИЗМ, УСТРОЙСТВО СЧИТЫВАНИЯ С ПЕРФОЛЕНТЫ ИЛИ МАГНИТНОЙ ЛЕНТЫ И Т. П. К ЭТОМУ ВИДУ САУ МОЖНО ОТНЕСТИ ЗАВОДНЫЕ ИГРУШКИ, МАГНИТОФОНЫ, ПРОИГРЫВАТЕЛИ И Т. П. РАЗЛИЧАЮТ СИСТЕМЫ С ВРЕМЕННОЙ ПРОГРАММОЙ (НАПРИМЕР, РИС. 1), ОБЕСПЕЧИВАЮЩИЕ Y = F(T), И СИСТЕМЫ С ПРОСТРАНСТВЕННОЙ ПРОГРАММОЙ, В КОТОРЫХ Y = F(X), ПРИМЕНЯЕМЫЕ ТАМ, ГДЕ НА ВЫХОДЕ САУ ВАЖНО ПОЛУЧИТЬ ТРЕБУЕМУЮ ТРАЕКТОРИЮ В ПРОСТРАНСТВЕ, НАПРИМЕР, В КОПИРОВАЛЬНОМ СТАНКЕ (РИС. 11), ЗАКОН ДВИЖЕНИЯ ВО ВРЕМЕНИ ЗДЕСЬ РОЛИ НЕ ИГРАЕТ. СЛЕДЯЩИЕ СИСТЕМЫ ОТЛИЧАЮТСЯ ОТ ПРОГРАММНЫХ ЛИШЬ ТЕМ, ЧТО ПРОГРАММА Y = F(T) ИЛИ Y = F(X) ЗАРАНЕЕ НЕИЗВЕСТНА. В КАЧЕСТВЕ ЗУ ВЫСТУПАЕТ УСТРОЙСТВО, СЛЕДЯЩЕЕ ЗА ИЗМЕНЕНИЕМ КАКОГО-ЛИБО ВНЕШНЕГО ПАРАМЕТРА. ЭТИ ИЗМЕНЕНИЯ И БУДУТ ОПРЕДЕЛЯТЬ ИЗМЕНЕНИЯ ВЫХОДНОЙ ВЕЛИЧИНЫ САУ. НАПРИМЕР, РУКА РОБОТА, ПОВТОРЯЮЩАЯ ДВИЖЕНИЯ РУКИ ЧЕЛОВЕКА. ВСЕ ТРИ РАССМОТРЕННЫЕ ВИДА САУ МОГУТ БЫТЬ ПОСТРОЕНЫ ПО ЛЮБОМУ ИЗ ТРЕХ ФУНДАМЕНТАЛЬНЫХ ПРИНЦИПОВ УПРАВЛЕНИЯ. ДЛЯ НИХ ХАРАКТЕРНО ТРЕБОВАНИЕ СОВПАДЕНИЯ ВЫХОДНОЙ ВЕЛИЧИНЫ С НЕКОТОРЫМ ПРЕДПИСАННЫМ ЗНАЧЕНИЕМ НА ВХОДЕ САУ, КОТОРОЕ САМО МОЖЕТ МЕНЯТЬСЯ. ТО ЕСТЬ В ЛЮБОЙ МОМЕНТ ВРЕМЕНИ ТРЕБУЕМОЕ ЗНАЧЕНИЕ ВЫХОДНОЙ ВЕЛИЧИНЫ ОПРЕДЕЛЕНО ОДНОЗНАЧНО. В САМОНАСТРАИВАЮЩИХСЯ СИСТЕМАХ ЗУ ИЩЕТ ТАКОЕ ЗНАЧЕНИЕ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ, КОТОРОЕ В КАКОМ-ТО СМЫСЛЕ ЯВЛЯЕТСЯ ОПТИМАЛЬНЫМ.
В ПРОГРАММНЫХ СИСТЕМАХ ОБЕСПЕЧИВАЕТСЯ ИЗМЕНЕНИЕ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ В СООТВЕТСТВИИ С ПРОГРАММОЙ, ФОРМИРУЕМОЙ ЗУ. В КАЧЕСТВЕ ЗУ МОЖЕТ ИСПОЛЬЗОВАТЬСЯ КУЛАЧКОВЫЙ МЕХАНИЗМ, УСТРОЙСТВО СЧИТЫВАНИЯ С ПЕРФОЛЕНТЫ ИЛИ МАГНИТНОЙ ЛЕНТЫ И Т. П. К ЭТОМУ ВИДУ САУ МОЖНО ОТНЕСТИ ЗАВОДНЫЕ ИГРУШКИ, МАГНИТОФОНЫ, ПРОИГРЫВАТЕЛИ И Т. П. РАЗЛИЧАЮТ СИСТЕМЫ С ВРЕМЕННОЙ ПРОГРАММОЙ (НАПРИМЕР, РИС. 1), ОБЕСПЕЧИВАЮЩИЕ Y = F(T), И СИСТЕМЫ С ПРОСТРАНСТВЕННОЙ ПРОГРАММОЙ, В КОТОРЫХ Y = F(X), ПРИМЕНЯЕМЫЕ ТАМ, ГДЕ НА ВЫХОДЕ САУ ВАЖНО ПОЛУЧИТЬ ТРЕБУЕМУЮ ТРАЕКТОРИЮ В ПРОСТРАНСТВЕ, НАПРИМЕР, В КОПИРОВАЛЬНОМ СТАНКЕ (РИС. 11), ЗАКОН ДВИЖЕНИЯ ВО ВРЕМЕНИ ЗДЕСЬ РОЛИ НЕ ИГРАЕТ. СЛЕДЯЩИЕ СИСТЕМЫ ОТЛИЧАЮТСЯ ОТ ПРОГРАММНЫХ ЛИШЬ ТЕМ, ЧТО ПРОГРАММА Y = F(T) ИЛИ Y = F(X) ЗАРАНЕЕ НЕИЗВЕСТНА. В КАЧЕСТВЕ ЗУ ВЫСТУПАЕТ УСТРОЙСТВО, СЛЕДЯЩЕЕ ЗА ИЗМЕНЕНИЕМ КАКОГО-ЛИБО ВНЕШНЕГО ПАРАМЕТРА. ЭТИ ИЗМЕНЕНИЯ И БУДУТ ОПРЕДЕЛЯТЬ ИЗМЕНЕНИЯ ВЫХОДНОЙ ВЕЛИЧИНЫ САУ. НАПРИМЕР, РУКА РОБОТА, ПОВТОРЯЮЩАЯ ДВИЖЕНИЯ РУКИ ЧЕЛОВЕКА. ВСЕ ТРИ РАССМОТРЕННЫЕ ВИДА САУ МОГУТ БЫТЬ ПОСТРОЕНЫ ПО ЛЮБОМУ ИЗ ТРЕХ ФУНДАМЕНТАЛЬНЫХ ПРИНЦИПОВ УПРАВЛЕНИЯ. ДЛЯ НИХ ХАРАКТЕРНО ТРЕБОВАНИЕ СОВПАДЕНИЯ ВЫХОДНОЙ ВЕЛИЧИНЫ С НЕКОТОРЫМ ПРЕДПИСАННЫМ ЗНАЧЕНИЕМ НА ВХОДЕ САУ, КОТОРОЕ САМО МОЖЕТ МЕНЯТЬСЯ. ТО ЕСТЬ В ЛЮБОЙ МОМЕНТ ВРЕМЕНИ ТРЕБУЕМОЕ ЗНАЧЕНИЕ ВЫХОДНОЙ ВЕЛИЧИНЫ ОПРЕДЕЛЕНО ОДНОЗНАЧНО. В САМОНАСТРАИВАЮЩИХСЯ СИСТЕМАХ ЗУ ИЩЕТ ТАКОЕ ЗНАЧЕНИЕ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ, КОТОРОЕ В КАКОМ-ТО СМЫСЛЕ ЯВЛЯЕТСЯ ОПТИМАЛЬНЫМ.
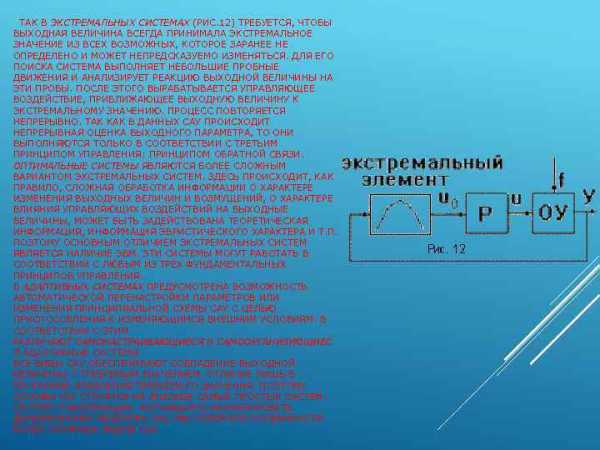 ТАК В ЭКСТРЕМАЛЬНЫХ СИСТЕМАХ (РИС. 12) ТРЕБУЕТСЯ, ЧТОБЫ ВЫХОДНАЯ ВЕЛИЧИНА ВСЕГДА ПРИНИМАЛА ЭКСТРЕМАЛЬНОЕ ЗНАЧЕНИЕ ИЗ ВСЕХ ВОЗМОЖНЫХ, КОТОРОЕ ЗАРАНЕЕ НЕ ОПРЕДЕЛЕНО И МОЖЕТ НЕПРЕДСКАЗУЕМО ИЗМЕНЯТЬСЯ. ДЛЯ ЕГО ПОИСКА СИСТЕМА ВЫПОЛНЯЕТ НЕБОЛЬШИЕ ПРОБНЫЕ ДВИЖЕНИЯ И АНАЛИЗИРУЕТ РЕАКЦИЮ ВЫХОДНОЙ ВЕЛИЧИНЫ НА ЭТИ ПРОБЫ. ПОСЛЕ ЭТОГО ВЫРАБАТЫВАЕТСЯ УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ, ПРИБЛИЖАЮЩЕЕ ВЫХОДНУЮ ВЕЛИЧИНУ К ЭКСТРЕМАЛЬНОМУ ЗНАЧЕНИЮ. ПРОЦЕСС ПОВТОРЯЕТСЯ НЕПРЕРЫВНО. ТАК КАК В ДАННЫХ САУ ПРОИСХОДИТ НЕПРЕРЫВНАЯ ОЦЕНКА ВЫХОДНОГО ПАРАМЕТРА, ТО ОНИ ВЫПОЛНЯЮТСЯ ТОЛЬКО В СООТВЕТСТВИИ С ТРЕТЬИМ ПРИНЦИПОМ УПРАВЛЕНИЯ: ПРИНЦИПОМ ОБРАТНОЙ СВЯЗИ. ОПТИМАЛЬНЫЕ СИСТЕМЫ ЯВЛЯЮТСЯ БОЛЕЕ СЛОЖНЫМ ВАРИАНТОМ ЭКСТРЕМАЛЬНЫХ СИСТЕМ. ЗДЕСЬ ПРОИСХОДИТ, КАК ПРАВИЛО, СЛОЖНАЯ ОБРАБОТКА ИНФОРМАЦИИ О ХАРАКТЕРЕ ИЗМЕНЕНИЯ ВЫХОДНЫХ ВЕЛИЧИН И ВОЗМУЩЕНИЙ, О ХАРАКТЕРЕ ВЛИЯНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА ВЫХОДНЫЕ ВЕЛИЧИНЫ, МОЖЕТ БЫТЬ ЗАДЕЙСТВОВАНА ТЕОРЕТИЧЕСКАЯ ИНФОРМАЦИЯ, ИНФОРМАЦИЯ ЭВРИСТИЧЕСКОГО ХАРАКТЕРА И Т. П. ПОЭТОМУ ОСНОВНЫМ ОТЛИЧИЕМ ЭКСТРЕМАЛЬНЫХ СИСТЕМ ЯВЛЯЕТСЯ НАЛИЧИЕ ЭВМ. ЭТИ СИСТЕМЫ МОГУТ РАБОТАТЬ В СООТВЕТСТВИИ С ЛЮБЫМ ИЗ ТРЕХ ФУНДАМЕНТАЛЬНЫХ ПРИНЦИПОВ УПРАВЛЕНИЯ. В АДАПТИВНЫХ СИСТЕМАХ ПРЕДУСМОТРЕНА ВОЗМОЖНОСТЬ АВТОМАТИЧЕСКОЙ ПЕРЕНАСТРОЙКИ ПАРАМЕТРОВ ИЛИ ИЗМЕНЕНИЯ ПРИНЦИПИАЛЬНОЙ СХЕМЫ САУ С ЦЕЛЬЮ ПРИСПОСОБЛЕНИЯ К ИЗМЕНЯЮЩИМСЯ ВНЕШНИМ УСЛОВИЯМ. В СООТВЕТСТВИИ С ЭТИМ РАЗЛИЧАЮТ САМОНАСТРАИВАЮЩИЕСЯ И САМООРГАНИЗУЮЩИЕС Я АДАПТИВНЫЕ СИСТЕМЫ. ВСЕ ВИДЫ САУ ОБЕСПЕЧИВАЮТ СОВПАДЕНИЕ ВЫХОДНОЙ ВЕЛИЧИНЫ С ТРЕБУЕМЫМ ЗНАЧЕНИЕМ. ОТЛИЧИЕ ЛИШЬ В ПРОГРАММЕ ИЗМЕНЕНИЯ ТРЕБУЕМОГО ЗНАЧЕНИЯ. ПОЭТОМУ ОСНОВЫ ТАУ СТРОЯТСЯ НА АНАЛИЗЕ САМЫХ ПРОСТЫХ СИСТЕМ: СИСТЕМ СТАБИЛИЗАЦИИ. НАУЧИВШИСЬ АНАЛИЗИРОВАТЬ ДИНАМИЧЕСКИЕ СВОЙСТВА САУ, МЫ УЧТЕМ ВСЕ ОСОБЕННОСТИ БОЛЕЕ СЛОЖНЫХ ВИДОВ САУ.
ТАК В ЭКСТРЕМАЛЬНЫХ СИСТЕМАХ (РИС. 12) ТРЕБУЕТСЯ, ЧТОБЫ ВЫХОДНАЯ ВЕЛИЧИНА ВСЕГДА ПРИНИМАЛА ЭКСТРЕМАЛЬНОЕ ЗНАЧЕНИЕ ИЗ ВСЕХ ВОЗМОЖНЫХ, КОТОРОЕ ЗАРАНЕЕ НЕ ОПРЕДЕЛЕНО И МОЖЕТ НЕПРЕДСКАЗУЕМО ИЗМЕНЯТЬСЯ. ДЛЯ ЕГО ПОИСКА СИСТЕМА ВЫПОЛНЯЕТ НЕБОЛЬШИЕ ПРОБНЫЕ ДВИЖЕНИЯ И АНАЛИЗИРУЕТ РЕАКЦИЮ ВЫХОДНОЙ ВЕЛИЧИНЫ НА ЭТИ ПРОБЫ. ПОСЛЕ ЭТОГО ВЫРАБАТЫВАЕТСЯ УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ, ПРИБЛИЖАЮЩЕЕ ВЫХОДНУЮ ВЕЛИЧИНУ К ЭКСТРЕМАЛЬНОМУ ЗНАЧЕНИЮ. ПРОЦЕСС ПОВТОРЯЕТСЯ НЕПРЕРЫВНО. ТАК КАК В ДАННЫХ САУ ПРОИСХОДИТ НЕПРЕРЫВНАЯ ОЦЕНКА ВЫХОДНОГО ПАРАМЕТРА, ТО ОНИ ВЫПОЛНЯЮТСЯ ТОЛЬКО В СООТВЕТСТВИИ С ТРЕТЬИМ ПРИНЦИПОМ УПРАВЛЕНИЯ: ПРИНЦИПОМ ОБРАТНОЙ СВЯЗИ. ОПТИМАЛЬНЫЕ СИСТЕМЫ ЯВЛЯЮТСЯ БОЛЕЕ СЛОЖНЫМ ВАРИАНТОМ ЭКСТРЕМАЛЬНЫХ СИСТЕМ. ЗДЕСЬ ПРОИСХОДИТ, КАК ПРАВИЛО, СЛОЖНАЯ ОБРАБОТКА ИНФОРМАЦИИ О ХАРАКТЕРЕ ИЗМЕНЕНИЯ ВЫХОДНЫХ ВЕЛИЧИН И ВОЗМУЩЕНИЙ, О ХАРАКТЕРЕ ВЛИЯНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА ВЫХОДНЫЕ ВЕЛИЧИНЫ, МОЖЕТ БЫТЬ ЗАДЕЙСТВОВАНА ТЕОРЕТИЧЕСКАЯ ИНФОРМАЦИЯ, ИНФОРМАЦИЯ ЭВРИСТИЧЕСКОГО ХАРАКТЕРА И Т. П. ПОЭТОМУ ОСНОВНЫМ ОТЛИЧИЕМ ЭКСТРЕМАЛЬНЫХ СИСТЕМ ЯВЛЯЕТСЯ НАЛИЧИЕ ЭВМ. ЭТИ СИСТЕМЫ МОГУТ РАБОТАТЬ В СООТВЕТСТВИИ С ЛЮБЫМ ИЗ ТРЕХ ФУНДАМЕНТАЛЬНЫХ ПРИНЦИПОВ УПРАВЛЕНИЯ. В АДАПТИВНЫХ СИСТЕМАХ ПРЕДУСМОТРЕНА ВОЗМОЖНОСТЬ АВТОМАТИЧЕСКОЙ ПЕРЕНАСТРОЙКИ ПАРАМЕТРОВ ИЛИ ИЗМЕНЕНИЯ ПРИНЦИПИАЛЬНОЙ СХЕМЫ САУ С ЦЕЛЬЮ ПРИСПОСОБЛЕНИЯ К ИЗМЕНЯЮЩИМСЯ ВНЕШНИМ УСЛОВИЯМ. В СООТВЕТСТВИИ С ЭТИМ РАЗЛИЧАЮТ САМОНАСТРАИВАЮЩИЕСЯ И САМООРГАНИЗУЮЩИЕС Я АДАПТИВНЫЕ СИСТЕМЫ. ВСЕ ВИДЫ САУ ОБЕСПЕЧИВАЮТ СОВПАДЕНИЕ ВЫХОДНОЙ ВЕЛИЧИНЫ С ТРЕБУЕМЫМ ЗНАЧЕНИЕМ. ОТЛИЧИЕ ЛИШЬ В ПРОГРАММЕ ИЗМЕНЕНИЯ ТРЕБУЕМОГО ЗНАЧЕНИЯ. ПОЭТОМУ ОСНОВЫ ТАУ СТРОЯТСЯ НА АНАЛИЗЕ САМЫХ ПРОСТЫХ СИСТЕМ: СИСТЕМ СТАБИЛИЗАЦИИ. НАУЧИВШИСЬ АНАЛИЗИРОВАТЬ ДИНАМИЧЕСКИЕ СВОЙСТВА САУ, МЫ УЧТЕМ ВСЕ ОСОБЕННОСТИ БОЛЕЕ СЛОЖНЫХ ВИДОВ САУ.
 СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида y = F(u, f), в которых отсутствует время t. Соответствующие им графики называются статическими характеристиками. Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u) (рис. 13). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u.
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида y = F(u, f), в которых отсутствует время t. Соответствующие им графики называются статическими характеристиками. Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u) (рис. 13). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u.
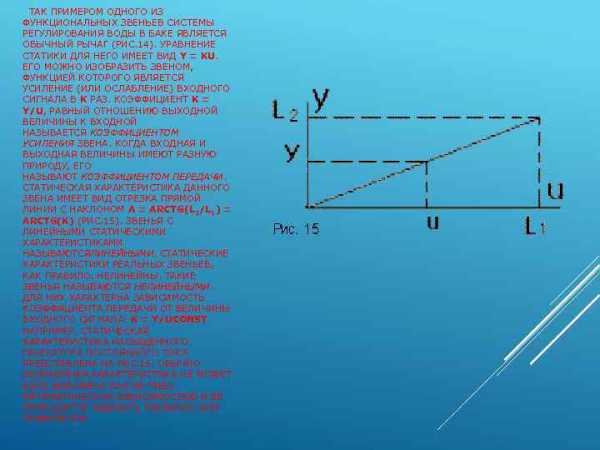 ТАК ПРИМЕРОМ ОДНОГО ИЗ ФУНКЦИОНАЛЬНЫХ ЗВЕНЬЕВ СИСТЕМЫ РЕГУЛИРОВАНИЯ ВОДЫ В БАКЕ ЯВЛЯЕТСЯ ОБЫЧНЫЙ РЫЧАГ (РИС. 14). УРАВНЕНИЕ СТАТИКИ ДЛЯ НЕГО ИМЕЕТ ВИД Y = KU. ЕГО МОЖНО ИЗОБРАЗИТЬ ЗВЕНОМ, ФУНКЦИЕЙ КОТОРОГО ЯВЛЯЕТСЯ УСИЛЕНИЕ (ИЛИ ОСЛАБЛЕНИЕ) ВХОДНОГО СИГНАЛА В K РАЗ. КОЭФФИЦИЕНТ K = Y/U, РАВНЫЙ ОТНОШЕНИЮ ВЫХОДНОЙ ВЕЛИЧИНЫ К ВХОДНОЙ НАЗЫВАЕТСЯ КОЭФФИЦИЕНТОМ УСИЛЕНИЯ ЗВЕНА. КОГДА ВХОДНАЯ И ВЫХОДНАЯ ВЕЛИЧИНЫ ИМЕЮТ РАЗНУЮ ПРИРОДУ, ЕГО НАЗЫВАЮТ КОЭФФИЦИЕНТОМ ПЕРЕДАЧИ. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА ДАННОГО ЗВЕНА ИМЕЕТ ВИД ОТРЕЗКА ПРЯМОЙ ЛИНИИ С НАКЛОНОМ A = ARCTG(L 2/L 1) = ARCTG(K) (РИС. 15). ЗВЕНЬЯ С ЛИНЕЙНЫМИ СТАТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ НАЗЫВАЮТСЯЛИНЕЙНЫМИ. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ РЕАЛЬНЫХ ЗВЕНЬЕВ, КАК ПРАВИЛО, НЕЛИНЕЙНЫ. ТАКИЕ ЗВЕНЬЯ НАЗЫВАЮТСЯ НЕЛИНЕЙНЫМИ. ДЛЯ НИХ ХАРАКТЕРНА ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ОТ ВЕЛИЧИНЫ ВХОДНОГО СИГНАЛА: K = Y/UCONST. НАПРИМЕР, СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА НАСЫЩЕННОГО ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА ПРЕДСТАВЛЕНА НА РИС. 16. ОБЫЧНО НЕЛИНЕЙНАЯ ХАРАКТЕРИСТИКА НЕ МОЖЕТ БЫТЬ ВЫРАЖЕНА КАКОЙ-ЛИБО МАТЕМАТИЧЕСКОЙ ЗАВИСИМОСТЬЮ И ЕЕ ПРИХОДИТСЯ ЗАДАВАТЬ ТАБЛИЧНО ИЛИ ГРАФИЧЕСКИ.
ТАК ПРИМЕРОМ ОДНОГО ИЗ ФУНКЦИОНАЛЬНЫХ ЗВЕНЬЕВ СИСТЕМЫ РЕГУЛИРОВАНИЯ ВОДЫ В БАКЕ ЯВЛЯЕТСЯ ОБЫЧНЫЙ РЫЧАГ (РИС. 14). УРАВНЕНИЕ СТАТИКИ ДЛЯ НЕГО ИМЕЕТ ВИД Y = KU. ЕГО МОЖНО ИЗОБРАЗИТЬ ЗВЕНОМ, ФУНКЦИЕЙ КОТОРОГО ЯВЛЯЕТСЯ УСИЛЕНИЕ (ИЛИ ОСЛАБЛЕНИЕ) ВХОДНОГО СИГНАЛА В K РАЗ. КОЭФФИЦИЕНТ K = Y/U, РАВНЫЙ ОТНОШЕНИЮ ВЫХОДНОЙ ВЕЛИЧИНЫ К ВХОДНОЙ НАЗЫВАЕТСЯ КОЭФФИЦИЕНТОМ УСИЛЕНИЯ ЗВЕНА. КОГДА ВХОДНАЯ И ВЫХОДНАЯ ВЕЛИЧИНЫ ИМЕЮТ РАЗНУЮ ПРИРОДУ, ЕГО НАЗЫВАЮТ КОЭФФИЦИЕНТОМ ПЕРЕДАЧИ. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА ДАННОГО ЗВЕНА ИМЕЕТ ВИД ОТРЕЗКА ПРЯМОЙ ЛИНИИ С НАКЛОНОМ A = ARCTG(L 2/L 1) = ARCTG(K) (РИС. 15). ЗВЕНЬЯ С ЛИНЕЙНЫМИ СТАТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ НАЗЫВАЮТСЯЛИНЕЙНЫМИ. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ РЕАЛЬНЫХ ЗВЕНЬЕВ, КАК ПРАВИЛО, НЕЛИНЕЙНЫ. ТАКИЕ ЗВЕНЬЯ НАЗЫВАЮТСЯ НЕЛИНЕЙНЫМИ. ДЛЯ НИХ ХАРАКТЕРНА ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ОТ ВЕЛИЧИНЫ ВХОДНОГО СИГНАЛА: K = Y/UCONST. НАПРИМЕР, СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА НАСЫЩЕННОГО ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА ПРЕДСТАВЛЕНА НА РИС. 16. ОБЫЧНО НЕЛИНЕЙНАЯ ХАРАКТЕРИСТИКА НЕ МОЖЕТ БЫТЬ ВЫРАЖЕНА КАКОЙ-ЛИБО МАТЕМАТИЧЕСКОЙ ЗАВИСИМОСТЬЮ И ЕЕ ПРИХОДИТСЯ ЗАДАВАТЬ ТАБЛИЧНО ИЛИ ГРАФИЧЕСКИ.
 ЗНАЯ СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОТДЕЛЬНЫХ ЗВЕНЬЕВ, МОЖНО ПОСТРОИТЬ СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ САУ (РИС. 17, 18). ЕСЛИ ВСЕ ЗВЕНЬЯ САУ ЛИНЕЙНЫЕ, ТО САУ ИМЕЕТ ЛИНЕЙНУЮ СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ И НАЗЫВАЕТСЯ ЛИНЕЙНОЙ. ЕСЛИ ХОТЯ БЫ ОДНО ЗВЕНО НЕЛИНЕЙНОЕ, ТО САУ НЕЛИНЕЙНАЯ. ЗВЕНЬЯ, ДЛЯ КОТОРЫХ МОЖНО ЗАДАТЬ СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ В ВИДЕ ЖЕСТКОЙ ФУНКЦИОНАЛЬНОЙ ЗАВИСИМОСТИ ВЫХОДНОЙ ВЕЛИЧИНЫ ОТ ВХОДНОЙ, НАЗЫВАЮТСЯ СТАТИЧЕСКИМИ. ЕСЛИ ТАКАЯ СВЯЗЬ ОТСУТСТВУЕТ И КАЖДОМУ ЗНАЧЕНИЮ ВХОДНОЙ ВЕЛИЧИНЫ СООТВЕТСТВУЕТ МНОЖЕСТВО ЗНАЧЕНИЙ ВЫХОДНОЙ ВЕЛИЧИНЫ, ТО ТАКОЕ ЗВЕНО НАЗЫВАЕТСЯАСТАТИЧЕСКИМ. ИЗОБРАЖАТЬ ЕГО СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ БЕССМЫСЛЕННО. ПРИМЕРОМ АСТАТИЧЕСКОГО ЗВЕНА МОЖЕТ СЛУЖИТЬ ДВИГАТЕЛЬ, ВХОДНОЙ ВЕЛИЧИНОЙ КОТОРОГО ЯВЛЯЕТСЯ НАПРЯЖЕНИЕ U, А ВЫХОДНОЙ - УГОЛ ПОВОРОТА ВАЛА , ВЕЛИЧИНА КОТОРОГО ПРИ U = CONST МОЖЕТ ПРИНИМАТЬ ЛЮБЫЕ ЗНАЧЕНИЯ. ВЫХОДНАЯ ВЕЛИЧИНА АСТАТИЧЕСКОГО ЗВЕНА ДАЖЕ В УСТАНОВИВШЕМСЯ РЕЖИМЕ ЯВЛЯЕТСЯ ФУНКЦИЕЙ ВРЕМЕНИ.
ЗНАЯ СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОТДЕЛЬНЫХ ЗВЕНЬЕВ, МОЖНО ПОСТРОИТЬ СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ САУ (РИС. 17, 18). ЕСЛИ ВСЕ ЗВЕНЬЯ САУ ЛИНЕЙНЫЕ, ТО САУ ИМЕЕТ ЛИНЕЙНУЮ СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ И НАЗЫВАЕТСЯ ЛИНЕЙНОЙ. ЕСЛИ ХОТЯ БЫ ОДНО ЗВЕНО НЕЛИНЕЙНОЕ, ТО САУ НЕЛИНЕЙНАЯ. ЗВЕНЬЯ, ДЛЯ КОТОРЫХ МОЖНО ЗАДАТЬ СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ В ВИДЕ ЖЕСТКОЙ ФУНКЦИОНАЛЬНОЙ ЗАВИСИМОСТИ ВЫХОДНОЙ ВЕЛИЧИНЫ ОТ ВХОДНОЙ, НАЗЫВАЮТСЯ СТАТИЧЕСКИМИ. ЕСЛИ ТАКАЯ СВЯЗЬ ОТСУТСТВУЕТ И КАЖДОМУ ЗНАЧЕНИЮ ВХОДНОЙ ВЕЛИЧИНЫ СООТВЕТСТВУЕТ МНОЖЕСТВО ЗНАЧЕНИЙ ВЫХОДНОЙ ВЕЛИЧИНЫ, ТО ТАКОЕ ЗВЕНО НАЗЫВАЕТСЯАСТАТИЧЕСКИМ. ИЗОБРАЖАТЬ ЕГО СТАТИЧЕСКУЮ ХАРАКТЕРИСТИКУ БЕССМЫСЛЕННО. ПРИМЕРОМ АСТАТИЧЕСКОГО ЗВЕНА МОЖЕТ СЛУЖИТЬ ДВИГАТЕЛЬ, ВХОДНОЙ ВЕЛИЧИНОЙ КОТОРОГО ЯВЛЯЕТСЯ НАПРЯЖЕНИЕ U, А ВЫХОДНОЙ - УГОЛ ПОВОРОТА ВАЛА , ВЕЛИЧИНА КОТОРОГО ПРИ U = CONST МОЖЕТ ПРИНИМАТЬ ЛЮБЫЕ ЗНАЧЕНИЯ. ВЫХОДНАЯ ВЕЛИЧИНА АСТАТИЧЕСКОГО ЗВЕНА ДАЖЕ В УСТАНОВИВШЕМСЯ РЕЖИМЕ ЯВЛЯЕТСЯ ФУНКЦИЕЙ ВРЕМЕНИ.
 СТАТИЧЕСКОЕ И АСТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ Если на управляемый процесс действует возмущение f, то важное значение имеет статическая характеристика САУ в формеy = F(f) при yo = const. Возможны два характерных вида этих характеристик (рис. 19). В соответствии с тем, какая из двух характеристик свойственна для данной САУ, различаютстатическое и астатическое регулирование. Рассмотрим систему регулирования уровня воды в баке (рис. 20). Возмущающим фактора является поток Q воды из бака. Пусть при Q = 0 имеем y = yo , e = 0. ЗУ системы настраивается так, чтобы вода при этом не поступала. При. Q 0, уровень воды понижается (e 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Но в любом случае при Q 0 заслонка должна быть обязательно открыта, что возможно только при e 0. Причем, чем больше Q, тем при больших значениях e, устанавливается новое равновесное состояние. Статическая характеристика САУ имеет характерный наклон (рис. 19 б). Это есть пример статического регулирования. Для получения статического регулирование, все звенья САР должны быть статическими.
СТАТИЧЕСКОЕ И АСТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ Если на управляемый процесс действует возмущение f, то важное значение имеет статическая характеристика САУ в формеy = F(f) при yo = const. Возможны два характерных вида этих характеристик (рис. 19). В соответствии с тем, какая из двух характеристик свойственна для данной САУ, различаютстатическое и астатическое регулирование. Рассмотрим систему регулирования уровня воды в баке (рис. 20). Возмущающим фактора является поток Q воды из бака. Пусть при Q = 0 имеем y = yo , e = 0. ЗУ системы настраивается так, чтобы вода при этом не поступала. При. Q 0, уровень воды понижается (e 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Но в любом случае при Q 0 заслонка должна быть обязательно открыта, что возможно только при e 0. Причем, чем больше Q, тем при больших значениях e, устанавливается новое равновесное состояние. Статическая характеристика САУ имеет характерный наклон (рис. 19 б). Это есть пример статического регулирования. Для получения статического регулирование, все звенья САР должны быть статическими.
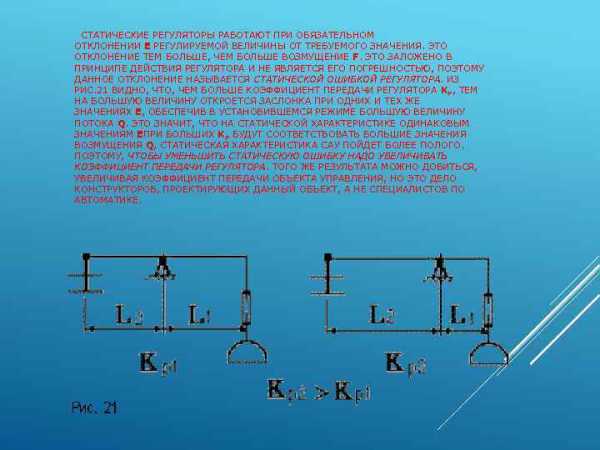 СТАТИЧЕСКИЕ РЕГУЛЯТОРЫ РАБОТАЮТ ПРИ ОБЯЗАТЕЛЬНОМ ОТКЛОНЕНИИ E РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ОТ ТРЕБУЕМОГО ЗНАЧЕНИЯ. ЭТО ОТКЛОНЕНИЕ ТЕМ БОЛЬШЕ, ЧЕМ БОЛЬШЕ ВОЗМУЩЕНИЕ F. ЭТО ЗАЛОЖЕНО В ПРИНЦИПЕ ДЕЙСТВИЯ РЕГУЛЯТОРА И НЕ ЯВЛЯЕТСЯ ЕГО ПОГРЕШНОСТЬЮ, ПОЭТОМУ ДАННОЕ ОТКЛОНЕНИЕ НАЗЫВАЕТСЯ СТАТИЧЕСКОЙ ОШИБКОЙ РЕГУЛЯТОРА. ИЗ РИС. 21 ВИДНО, ЧТО, ЧЕМ БОЛЬШЕ КОЭФФИЦИЕНТ ПЕРЕДАЧИ РЕГУЛЯТОРА KР, ТЕМ НА БОЛЬШУЮ ВЕЛИЧИНУ ОТКРОЕТСЯ ЗАСЛОНКА ПРИ ОДНИХ И ТЕХ ЖЕ ЗНАЧЕНИЯХ E, ОБЕСПЕЧИВ В УСТАНОВИВШЕМСЯ РЕЖИМЕ БОЛЬШУЮ ВЕЛИЧИНУ ПОТОКА Q. ЭТО ЗНАЧИТ, ЧТО НА СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКЕ ОДИНАКОВЫМ ЗНАЧЕНИЯМ EПРИ БОЛЬШИХ KР БУДУТ СООТВЕТСТВОВАТЬ БОЛЬШИЕ ЗНАЧЕНИЯ ВОЗМУЩЕНИЯ Q, СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА САУ ПОЙДЕТ БОЛЕЕ ПОЛОГО. ПОЭТОМУ, ЧТОБЫ УМЕНЬШИТЬ СТАТИЧЕСКУЮ ОШИБКУ НАДО УВЕЛИЧИВАТЬ КОЭФФИЦИЕНТ ПЕРЕДАЧИ РЕГУЛЯТОРА. ТОГО ЖЕ РЕЗУЛЬТАТА МОЖНО ДОБИТЬСЯ, УВЕЛИЧИВАЯ КОЭФФИЦИЕНТ ПЕРЕДАЧИ ОБЪЕКТА УПРАВЛЕНИЯ, НО ЭТО ДЕЛО КОНСТРУКТОРОВ, ПРОЕКТИРУЮЩИХ ДАННЫЙ ОБЪЕКТ, А НЕ СПЕЦИАЛИСТОВ ПО АВТОМАТИКЕ.
СТАТИЧЕСКИЕ РЕГУЛЯТОРЫ РАБОТАЮТ ПРИ ОБЯЗАТЕЛЬНОМ ОТКЛОНЕНИИ E РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ОТ ТРЕБУЕМОГО ЗНАЧЕНИЯ. ЭТО ОТКЛОНЕНИЕ ТЕМ БОЛЬШЕ, ЧЕМ БОЛЬШЕ ВОЗМУЩЕНИЕ F. ЭТО ЗАЛОЖЕНО В ПРИНЦИПЕ ДЕЙСТВИЯ РЕГУЛЯТОРА И НЕ ЯВЛЯЕТСЯ ЕГО ПОГРЕШНОСТЬЮ, ПОЭТОМУ ДАННОЕ ОТКЛОНЕНИЕ НАЗЫВАЕТСЯ СТАТИЧЕСКОЙ ОШИБКОЙ РЕГУЛЯТОРА. ИЗ РИС. 21 ВИДНО, ЧТО, ЧЕМ БОЛЬШЕ КОЭФФИЦИЕНТ ПЕРЕДАЧИ РЕГУЛЯТОРА KР, ТЕМ НА БОЛЬШУЮ ВЕЛИЧИНУ ОТКРОЕТСЯ ЗАСЛОНКА ПРИ ОДНИХ И ТЕХ ЖЕ ЗНАЧЕНИЯХ E, ОБЕСПЕЧИВ В УСТАНОВИВШЕМСЯ РЕЖИМЕ БОЛЬШУЮ ВЕЛИЧИНУ ПОТОКА Q. ЭТО ЗНАЧИТ, ЧТО НА СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКЕ ОДИНАКОВЫМ ЗНАЧЕНИЯМ EПРИ БОЛЬШИХ KР БУДУТ СООТВЕТСТВОВАТЬ БОЛЬШИЕ ЗНАЧЕНИЯ ВОЗМУЩЕНИЯ Q, СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА САУ ПОЙДЕТ БОЛЕЕ ПОЛОГО. ПОЭТОМУ, ЧТОБЫ УМЕНЬШИТЬ СТАТИЧЕСКУЮ ОШИБКУ НАДО УВЕЛИЧИВАТЬ КОЭФФИЦИЕНТ ПЕРЕДАЧИ РЕГУЛЯТОРА. ТОГО ЖЕ РЕЗУЛЬТАТА МОЖНО ДОБИТЬСЯ, УВЕЛИЧИВАЯ КОЭФФИЦИЕНТ ПЕРЕДАЧИ ОБЪЕКТА УПРАВЛЕНИЯ, НО ЭТО ДЕЛО КОНСТРУКТОРОВ, ПРОЕКТИРУЮЩИХ ДАННЫЙ ОБЪЕКТ, А НЕ СПЕЦИАЛИСТОВ ПО АВТОМАТИКЕ.
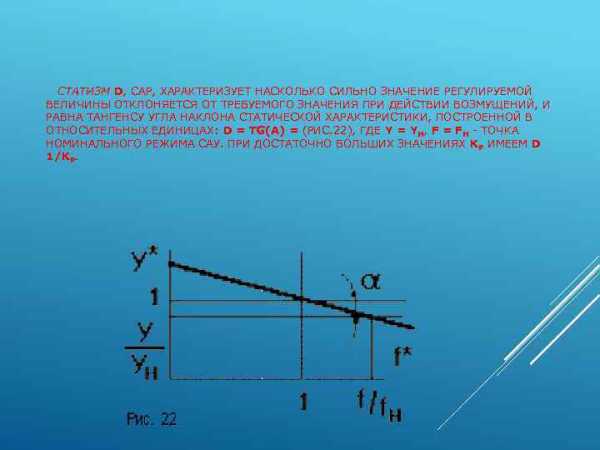 СТАТИЗМ D, САР, ХАРАКТЕРИЗУЕТ НАСКОЛЬКО СИЛЬНО ЗНАЧЕНИЕ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ОТКЛОНЯЕТСЯ ОТ ТРЕБУЕМОГО ЗНАЧЕНИЯ ПРИ ДЕЙСТВИИ ВОЗМУЩЕНИЙ, И РАВНА ТАНГЕНСУ УГЛА НАКЛОНА СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ, ПОСТРОЕННОЙ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ: D = TG(A) = (РИС. 22), ГДЕ Y = YН, F = FН - ТОЧКА НОМИНАЛЬНОГО РЕЖИМА САУ. ПРИ ДОСТАТОЧНО БОЛЬШИХ ЗНАЧЕНИЯХ KP ИМЕЕМ D 1/KP.
СТАТИЗМ D, САР, ХАРАКТЕРИЗУЕТ НАСКОЛЬКО СИЛЬНО ЗНАЧЕНИЕ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ОТКЛОНЯЕТСЯ ОТ ТРЕБУЕМОГО ЗНАЧЕНИЯ ПРИ ДЕЙСТВИИ ВОЗМУЩЕНИЙ, И РАВНА ТАНГЕНСУ УГЛА НАКЛОНА СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ, ПОСТРОЕННОЙ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ: D = TG(A) = (РИС. 22), ГДЕ Y = YН, F = FН - ТОЧКА НОМИНАЛЬНОГО РЕЖИМА САУ. ПРИ ДОСТАТОЧНО БОЛЬШИХ ЗНАЧЕНИЯХ KP ИМЕЕМ D 1/KP.
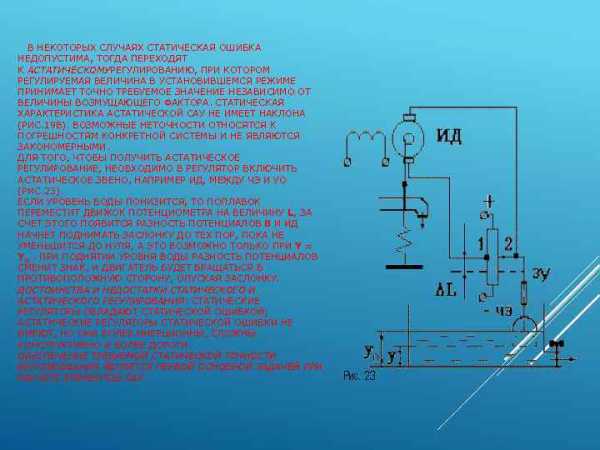 В НЕКОТОРЫХ СЛУЧАЯХ СТАТИЧЕСКАЯ ОШИБКА НЕДОПУСТИМА, ТОГДА ПЕРЕХОДЯТ К АСТАТИЧЕСКОМУРЕГУЛИРОВАНИЮ, ПРИ КОТОРОМ РЕГУЛИРУЕМАЯ ВЕЛИЧИНА В УСТАНОВИВШЕМСЯ РЕЖИМЕ ПРИНИМАЕТ ТОЧНО ТРЕБУЕМОЕ ЗНАЧЕНИЕ НЕЗАВИСИМО ОТ ВЕЛИЧИНЫ ВОЗМУЩАЮЩЕГО ФАКТОРА. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА АСТАТИЧЕСКОЙ САУ НЕ ИМЕЕТ НАКЛОНА (РИС. 19 В). ВОЗМОЖНЫЕ НЕТОЧНОСТИ ОТНОСЯТСЯ К ПОГРЕШНОСТЯМ КОНКРЕТНОЙ СИСТЕМЫ И НЕ ЯВЛЯЮТСЯ ЗАКОНОМЕРНЫМИ. ДЛЯ ТОГО, ЧТОБЫ ПОЛУЧИТЬ АСТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ, НЕОБХОДИМО В РЕГУЛЯТОР ВКЛЮЧИТЬ АСТАТИЧЕСКОЕ ЗВЕНО, НАПРИМЕР ИД, МЕЖДУ ЧЭ И УО (РИС. 23). ЕСЛИ УРОВЕНЬ ВОДЫ ПОНИЗИТСЯ, ТО ПОПЛАВОК ПЕРЕМЕСТИТ ДВИЖОК ПОТЕНЦИОМЕТРА НА ВЕЛИЧИНУ L, ЗА СЧЕТ ЭТОГО ПОЯВИТСЯ РАЗНОСТЬ ПОТЕНЦИАЛОВ 0 И ИД НАЧНЕТ ПОДНИМАТЬ ЗАСЛОНКУ ДО ТЕХ ПОР, ПОКА НЕ УМЕНЬШИТСЯ ДО НУЛЯ, А ЭТО ВОЗМОЖНО ТОЛЬКО ПРИ Y = YO. ПРИ ПОДНЯТИИ УРОВНЯ ВОДЫ РАЗНОСТЬ ПОТЕНЦИАЛОВ СМЕНИТ ЗНАК, И ДВИГАТЕЛЬ БУДЕТ ВРАЩАТЬСЯ В ПРОТИВОПОЛОЖНУЮ СТОРОНУ, ОПУСКАЯ ЗАСЛОНКУ. ДОСТОИНСТВА И НЕДОСТАТКИ СТАТИЧЕСКОГО И АСТАТИЧЕСКОГО РЕГУЛИРОВАНИЯ: СТАТИЧЕСКИЕ РЕГУЛЯТОРЫ ОБЛАДАЮТ СТАТИЧЕСКОЙ ОШИБКОЙ; АСТАТИЧЕСКИЕ РЕГУЛЯТОРЫ СТАТИЧЕСКОЙ ОШИБКИ НЕ ИМЕЮТ, НО ОНИ БОЛЕЕ ИНЕРЦИОННЫ, СЛОЖНЫ КОНСТРУКТИВНО И БОЛЕЕ ДОРОГИ. ОБЕСПЕЧЕНИЕ ТРЕБУЕМОЙ СТАТИЧЕСКОЙ ТОЧНОСТИ РЕГУЛИРОВАНИЯ ЯВЛЯЕТСЯ ПЕРВОЙ ОСНОВНОЙ ЗАДАЧЕЙ ПРИ РАСЧЕТЕ ЭЛЕМЕНТОВ САУ.
В НЕКОТОРЫХ СЛУЧАЯХ СТАТИЧЕСКАЯ ОШИБКА НЕДОПУСТИМА, ТОГДА ПЕРЕХОДЯТ К АСТАТИЧЕСКОМУРЕГУЛИРОВАНИЮ, ПРИ КОТОРОМ РЕГУЛИРУЕМАЯ ВЕЛИЧИНА В УСТАНОВИВШЕМСЯ РЕЖИМЕ ПРИНИМАЕТ ТОЧНО ТРЕБУЕМОЕ ЗНАЧЕНИЕ НЕЗАВИСИМО ОТ ВЕЛИЧИНЫ ВОЗМУЩАЮЩЕГО ФАКТОРА. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА АСТАТИЧЕСКОЙ САУ НЕ ИМЕЕТ НАКЛОНА (РИС. 19 В). ВОЗМОЖНЫЕ НЕТОЧНОСТИ ОТНОСЯТСЯ К ПОГРЕШНОСТЯМ КОНКРЕТНОЙ СИСТЕМЫ И НЕ ЯВЛЯЮТСЯ ЗАКОНОМЕРНЫМИ. ДЛЯ ТОГО, ЧТОБЫ ПОЛУЧИТЬ АСТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ, НЕОБХОДИМО В РЕГУЛЯТОР ВКЛЮЧИТЬ АСТАТИЧЕСКОЕ ЗВЕНО, НАПРИМЕР ИД, МЕЖДУ ЧЭ И УО (РИС. 23). ЕСЛИ УРОВЕНЬ ВОДЫ ПОНИЗИТСЯ, ТО ПОПЛАВОК ПЕРЕМЕСТИТ ДВИЖОК ПОТЕНЦИОМЕТРА НА ВЕЛИЧИНУ L, ЗА СЧЕТ ЭТОГО ПОЯВИТСЯ РАЗНОСТЬ ПОТЕНЦИАЛОВ 0 И ИД НАЧНЕТ ПОДНИМАТЬ ЗАСЛОНКУ ДО ТЕХ ПОР, ПОКА НЕ УМЕНЬШИТСЯ ДО НУЛЯ, А ЭТО ВОЗМОЖНО ТОЛЬКО ПРИ Y = YO. ПРИ ПОДНЯТИИ УРОВНЯ ВОДЫ РАЗНОСТЬ ПОТЕНЦИАЛОВ СМЕНИТ ЗНАК, И ДВИГАТЕЛЬ БУДЕТ ВРАЩАТЬСЯ В ПРОТИВОПОЛОЖНУЮ СТОРОНУ, ОПУСКАЯ ЗАСЛОНКУ. ДОСТОИНСТВА И НЕДОСТАТКИ СТАТИЧЕСКОГО И АСТАТИЧЕСКОГО РЕГУЛИРОВАНИЯ: СТАТИЧЕСКИЕ РЕГУЛЯТОРЫ ОБЛАДАЮТ СТАТИЧЕСКОЙ ОШИБКОЙ; АСТАТИЧЕСКИЕ РЕГУЛЯТОРЫ СТАТИЧЕСКОЙ ОШИБКИ НЕ ИМЕЮТ, НО ОНИ БОЛЕЕ ИНЕРЦИОННЫ, СЛОЖНЫ КОНСТРУКТИВНО И БОЛЕЕ ДОРОГИ. ОБЕСПЕЧЕНИЕ ТРЕБУЕМОЙ СТАТИЧЕСКОЙ ТОЧНОСТИ РЕГУЛИРОВАНИЯ ЯВЛЯЕТСЯ ПЕРВОЙ ОСНОВНОЙ ЗАДАЧЕЙ ПРИ РАСЧЕТЕ ЭЛЕМЕНТОВ САУ.
 СПАСИБО ЗА ВНИМАНИЕ!!!
СПАСИБО ЗА ВНИМАНИЕ!!!
present5.com
2.2. Статические характеристики систем управления [7].
Математические модели систем управления включают два вида описания состояния: статическое и динамическое.
Виды статических характеристик.Режим работы систем, в котором управляемая и все промежуточные величины не изменяются во времени, называется статическим (установившимся) и описывается уравнениями зависимости выходного состояния объекта управления от постоянных (независимых от времени) значений управляющих воздействий u и любых других дестабилизирующих факторов f. Уравнения этой зависимости вида y = F(u,f) называются уравнениями статики систем. Соответствующие им графики называются статическими характеристиками.
Рис. 2.2.1. Статическая характеристика САУ.
Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u (рис. 2.2.1).Примером функционального звена системы регулирования уровня воды в баке может быть обычный рычаг с поплавком. Уравнение статики для него имеет вид y = K u. Функцией звена является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной, называется коэффициентом усиления звена. Если входная и выходная величины имеют разную природу, его называют коэффициентом передачи. Звенья с линейными статическими характеристиками называются линейными. Статические характеристики реальных звеньев систем, как правило, нелинейные. Для них характерна зависимость коэффициента передачи от величины входного сигнала: K=y/u ≠ const, которая может быть выражена какой-либо математической зависимостью, задаваться таблично или графически. Если все звенья системы линейные, то система имеет линейную статическую характеристику. Если хотя бы одно звено нелинейное, то система нелинейная.
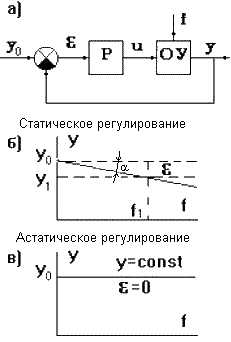
Рис. 2.2.2.
Статическое и астатическое регулирование.Если на управляемый процесс действует возмущение (дестабилизирующий фактор) f, то значение имеет статическая характеристика системы в форме y = F(f) при y0 = const. Возможны два характерных вида этих характеристик (рис. 2.2.2). В соответствии с тем, какая из двух характеристик свойственна данной системе, различают статическое и астатическое регулирование.Рассмотрим систему регулирования уровня воды в баке. Возмущающим фактором системы является поток Q воды из бака. Пусть при Q = 0 имеем y = y0, сигнал рассогласования по заданному уровню воды = 0. Звено управления Р системы (регулятор) настраивается так, чтобы вода при этом в бак не поступала. При Q ≠ 0, уровень воды понижается ( ≠ 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Следовательно, при Q ≠ 0 заслонка должна быть обязательно открыта, что возможно только при каком-то новом уровне воды y1, при котором = К (y0-y1) ≠ 0. Причем, чем больше Q, тем при больших значениях устанавливается новое равновесное состояние. Статическая характеристика системы имеет характерный наклон (рис. 2.2.2б).
Статические регуляторыработают при обязательном отклонении регулируемой величины y от требуемого значения у0. Это отклонение тем больше, чем больше возмущение f, и называется статической ошибкой регулятора. Чем больше коэффициент передачи К регулятора, тем на большую величину будет открываться заслонка при одних и тех же значениях , обеспечивая большую величину потока Q, при этом статическая характеристика системы пойдет более полого. Поэтому для уменьшения статической ошибки надо увеличивать коэффициент передачи регулятора. Этот параметр регулирования получил название статизма d и равен тангенсу угла наклона статической характеристики, построенной в относительных единицах:
d = tg() = y/yн) / (f/fн),
где yн, fн - точка номинального режима системы. При достаточно больших значениях К имеем d 1/K.
Астатический регуляторприменяется, если статическая ошибка регулирования недопустима и регулируемая величина должна поддерживать постоянное требуемое значение независимо от величины возмущающего фактора. Статическая характеристика астатической системы не имеет наклона. Для того чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено. Астатическое звено отличается тем, что каждому значению входной величины может соответствовать множество значений выходной величины. Так, для регулирования уровня воды в астатическом режиме может быть применен импульсный двигатель. Если уровень воды понизится, то появившееся значение включит импульсный двигатель и он начнет открывать заслонку до тех пор, пока значение не станет равным нулю (по определенному порогу). При поднятии уровня воды значение сменит знак, и запустит двигатель в противоположную сторону, опуская заслонку.
Астатические регуляторы не имеют статической ошибки, но они инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов системы управления.
studfiles.net
Статические и астатические системы
Рассмотрим динамическую систему с одним входным воздействием x(t) [5]:
y(t) = W(p) x(t),
где
W(p) = A(p)/B(p),
А(p) = am pm + am-1p+... +ao,
B(p) = bnpn +bn-1 p+...+ b, .
Будем полагать, что в данном случае в качестве входа x(t) может выступать как задающее, так и возмущающее воздействие, а под системой управления подразумевается как разомкнутая система, так и замкнутая. Для статической системы, т.е. системы, у которой b0, значение передаточной функции в точке p = 0 определяется как : W(0) =a/ b= k, где k – статический коэффициент системы, и при постоянном входном воздействии х(t) = const имеет место . Отметим, что для статической системы характеристическое уравнение B(p) = 0 не имеет нулевых корней. Включение статического (пропорционального) регулятора в схему управления уменьшает статизм замкнутой системы в 1/(k+1) раз, где k – коэффициент усиления разомкнутой системы, при этом увеличивается астатизм, то есть возрастает точность выполнения командного (задающего) сигнала.
Теперь рассмотрим астатическую систему, полагая
b0 = b1 = …= bk-1= 0, bk 0.
Ее характеристическое уравнение может быть приведено к виду
,
где
.
Такой полином имеет k нулевых корней. Число k назвается порядком астатизма. Для астатической системы можно записать
,
где
.
Характерным признаком астатизма служит наличие в структурной схеме k интегрирующих звеньев:
Порядок астатизма системы по управляющему воздействию равен числу интегрииующих звеньев, входящих в контур. Порядок астатизма замкнутой системы по отношению к рассматриваемому воздействию равен числу интегрирующих звеньев, включенных в цепь обратной связи между точками приложения этого воздействия (входом) и измерения ошибки (выходом) и не зависит от числа интегрирующих звеньев, включенных в цепь прямого преобразования сигнала между этими точками. Так как для астатической системы значение W(0) не определено, то можно ввести в рассмотрение показатель
,
называемый добротностью системы по соответствующей производной выходной переменной (по скорости, ускорению и т.д.). Отметим, что астатизм системы управления может быть обусловлен свойствами объекта управления или наличием в составе системы ПИ и ПИД – регуляторов. Реализация замкнутых систем с высоким порядком астатизма достаточно затруднительна, поскольку система автоматического регулирования, содержащая всего два интегрирующих звена, является структурно неустойчивой и не может быть реализована без специальных корректирующих устройств. Важно знать, что чем выше порядок астатизма системы, тем выше точность в установившемся режиме и меньше запас устойчивости. Введение пропорциональной составляющей в закон управления по отклонению влияет и на точность и на устойчивость.
В завершение раздела отметим следующие простые, но важные положения.
1. При любых последовательных и параллельных соединениях устойчивых систем всегда будет получаться устойчивая система.
2. Если среди соединяемых последовательно или параллельно систем имеется хотя бы одна неустойчивая, то и вся система, полученная в результате соединения, будет неустойчивой.
3. Исследование устойчивости любой линейной системы, полученной путем последовательного и параллельного соединения любого количества элементарных систем, может сводиться к исследованию устойчивости отдельных элементарных систем, входящих в ее состав.
4. Зная полюсы передаточных функций элементарных звеньев, легко определить какие полюсы в правой полуплоскости будет иметь передаточная функция системы, полученная путем последовательных и параллельных соединений этих звеньев, в случае, если она неустойчива.
studlib.info
Статические и динамические системы
Количество просмотров публикации Статические и динамические системы - 185
Классификация автоматических систем управления
Любая автоматическая система управления (АСУ) может рассматриваться как система преобразования сигналов (воздействий), ᴛ.ᴇ. как система, в которой входные воздействия Xi(t) преобразуются по определенному закону в выходные воздействия Yi(t).
Это объясняется тем, что основной целью систем управления является поддержание регулируемой величины на заданном значении, несмотря на то, что на объект в процессе его работы действуют возмущающие воздействия. Следовательно, в системе управления осуществляется преобразование входных сигналов-возмущений в выходные сигналы – изменение регулируемых величин.
Рис. 1 – 3
Рассматриваемая система преобразования сигналов (рис. 1 – 3) является детектирующей системой (изменение сигнала на входе системы приводит к соответствующему изменению сигнала на ее входе, но влияние выхода на вход – отсутствует). Это свойство существенно облегчает теоретические исследования систем автоматического управления, т.к. детектирующая система может рассматриваться относительно обособленной от внешнего мира системой, что позволяет рассматривать свойства этой системы независимо от свойства окружающей среды.
С точки зрения вида преобразуемых сигналов системы можно разделить на непрерывные и дискретные.
Рис. 1 – 4
Непрерывные (аналоговые) системы осуществляют непосредственное преобразование непрерывных сигналов, характерных для физических процессов, протекающих в природе и в непрерывных производственных процессах. При этом вход и выход непрерывных систем представляют из себянепрерывные сигналы, связанные между собой законом преобразования, осуществляемых этой системой.
Дискретные (импульсные) системы реализуются в дискретных (цифровых) вычислительных устройствах. Прежде чем подаваться на вход дискретной системы, непрерывный сигнал подвергается операции квантования (рис. 1 – 4) (квантование – выделение из непрерывного сигнала отдельных его значений), в результате которой он представляется последовательностью чисел, определяющих значение сигнала в дискретные (кТ) моменты времени через интервал времени (Т). Соответственно на выходе дискретной системы возникает также последовательность чисел, связанных с входной последовательностью законом преобразования этой системой.
С точки зрения закона преобразования системы делятся на 1) статические и динамические; 2) стационарные и нестационарные; 3) линейные и нелинейные; 4) детерминированные и вероятные.
Система принято называть статической (безинерционной), в случае если значение ее выхода в произвольный фиксированный момент времени определяется лишь значением входа в тот же момент и совершенно не зависит от того, какие значения принимал вход в предыдущие моменты времени. Математически эту связь (для системы с одним входом) можно записать:
В динамических (инерционных) системах значение выхода в фиксированный момент времени кТ зависит не только от значения входа в данный же момент, но также от значения в предыдущие моменты времени (ᴛ.ᴇ. система обладает ʼʼпамятьюʼʼ). Для дискретных динамических систем эта связь определяется в соответствии с функционалом вида:
,
где Т – интервал квантования;
к = 1, 2, 3…..
Стоит сказать, что для непрерывных систем данный функционал записывается в виде:
,
где x – ʼʼтекущееʼʼ время, меняющееся в общем случае от 0 до ¥.
referatwork.ru






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






