1 Понятие «Автоматизированный электропривод». Структурная схема аэп. Структурная схема электропривода
1 Понятие «Автоматизированный электропривод». Структурная схема аэп.
Понятие «Автоматизированный электропривод». Структурная схема АЭП.
Классификация ЭП.
Классификация по уровню автоматизации ЭП.
Задачи проектирования систем управления АЭП.
Управление пуском ЭД в функции скорости.
Управление пуском ЭД в функции тока.
Управление пуском ЭД в функции времени.
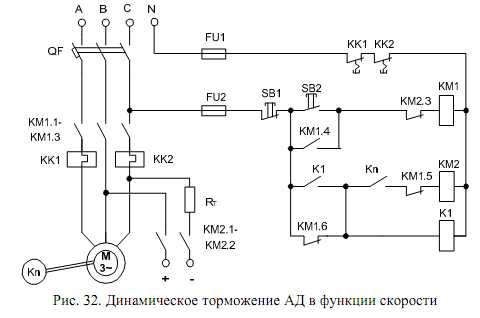
Автоматическое управление торможением ЭД в функции скорости.
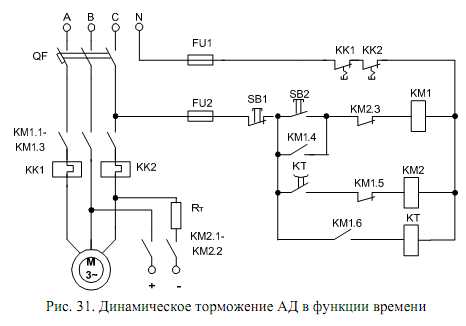
Автоматическое управление торможением АД в функции времени.
Торможение противовключением.
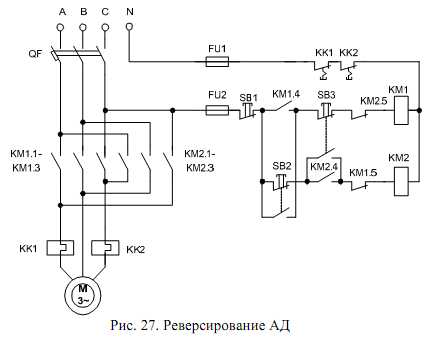
Схема реверсирования АД.
Система генератор-двигатель (Г-Д).
Основные понятия частотного управления.
Экономическая оценка энерго- и ресурсосбережения.
Основные понятия управления вентиляторным, насосным и компрессорным оборудованием.
Система управления насосом с преобразователем частоты.
Управление насосом с использованием нечетной логики.
Замкнутые и разомкнутые системы линейного электропривода.
Кинематические схемы колебательных линейных электроприводов.
Система автоматического регулирования угловой скорости с жесткой обратной связью по напряжению.
Система автоматического регулирования угловой скорости с жесткой положительной ОС.
Система автоматического регулирования угловой скорости с жесткой отрицательной обратной связью по угловой скорости.
Классификация обратных связей.
Автоматическое регулирование угловой скорости асинхронных ЭП при помощи тиристорных регуляторов напряжения.
Сравнительная характеристика типов регулируемых асинхронных электроприводов.
Выбор ЭП и принципа управления лифтом.
Основные типы тиристорных преобразователей частоты.
Основные пути повышения энергетической эффективности регулируемых ЭП.
Цели и принципы автоматического управления ЭП.
Бесконтактное управление ЭП. Сущность, сравнение тиристорного и релейно-контакторного управления ЭД, схема тиристорного управления трехфазным асинхронным ЭД.
Способы управления тиристорами.
Тиристорный электропривод постоянного тока. Его характеристики.
Импульсное регулирование частоты вращения двигателя постоянного тока.
Асинхронный электропривод с тиристорным регулятором напряжения.
Частотный вентильный асинхронный электропривод.
Асинхронный электропривод с импульсным регулированием добавочного сопротивления.
Асинхронный вентильный каскад.
Особенности электропривода сепараторов.
Двухскоростной электропривод сепараторов.
Эффекты, используемые в кремниевых датчиках.
Датчики линейных перемещений.
Частотно-регулируемый асинхронный электропривод стал основным средством энергосбережения при переходе от нерегулируемого электропривода к регулируемому электроприводу. Почему?
Резервы экономии энергии и ресурсов и принципы энергосбережения.
Почему насосы и вентиляторы признаны основными объектами энергосбережения средствами электропривода.
Автоматизированный эл.привод – это эл.механическая система состоящая из эл. двигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочих машин и целенаправленного управления этими процессами.
Структурная схема приведена на рисунке 1.
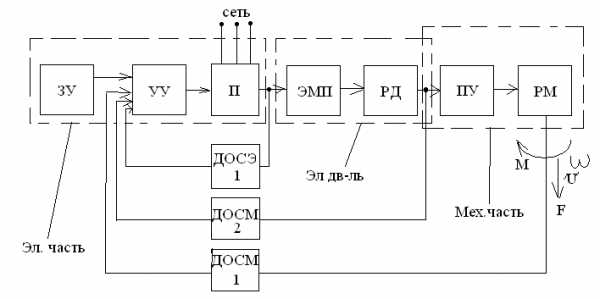
ЭМП - электродвигательное устройство.
ЗУ – задающее уст-во.
УУ – управляющее уст-во.
П – преобразователь.
ПУ – передаточное уст-во.
РМ – рабочий мех-м.
2 Классификация эп.
По роду тока
Электропривод постоянного и переменного тока.
По способу распределения механической энергии
1) Групповой ЭП
2) Индивидуальный ЭП.
3) Взаимосвязанный ЭП.
По виду движения различают реверсивный и нереверсивный ЭП поступательного либо вращательного движения.
По степени управляемости
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной скоростью, параметры привода меняются только в результате возмущающих воздействий;
2) регулируемый - скорость рабочего органа может изменяться в указанных пределах, параметры привода могут меняться под воздействием управляющего устройства;
3) программно-управляемый – скорость вращения изменяется согласно некоторой программе;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По роду передаточного устройства
1) Редукторный;
2) Безредукторный;
3 Классификация по уровню автоматизации эп.
1) Неавтоматизированный. Управление осуществляется в ручную. Применяется в установках малой мощности, бытовой и медицинской технике.
2) Автоматизированный. Регулирование параметров происходит автоматически, управляющие команды задаются вручную.
3) Автоматический. Управляющие воздействия вырабатываются автоматически, без участия оператора.
4 Задачи проектирования систем управления АЭП.
Электропривод позволяет эффективно решать сложные и ответственные задачи, связанные с повышением производительности, точности и автоматизации оборудования.
Задачи:
- расчет механической части электропривода;
- расчет силовой части системы управления;
- расчет информационной части системы управления;
- расчет энергетических показателей эл.привода;
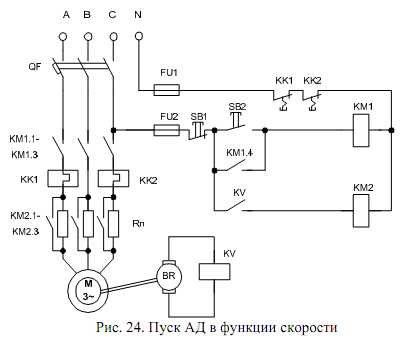
5 Управление пуском ЭД в функции скорости.
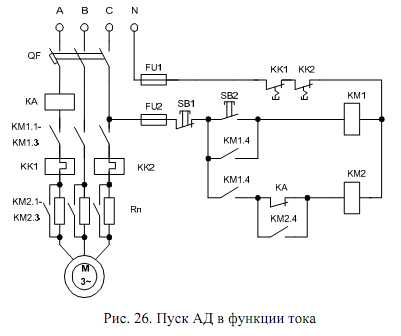
6 Управление пуском ЭД в функции тока.
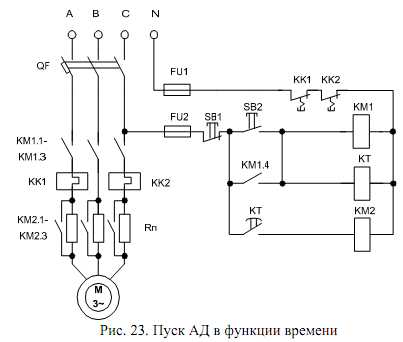
7 Управление пуском ЭД в функции времени.
8 Автоматическое управление торможением ЭД в функции скорости.
9 Автоматическое управление торможением АД в функции времени.
Торможение противовключением.
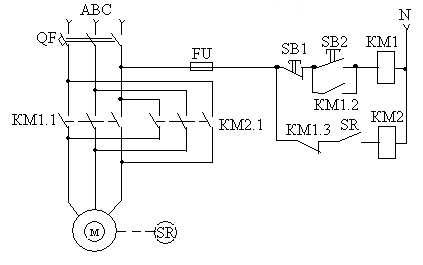
Схема реверсирования АД.
12 Система генератор-двигатель (Г-Д).
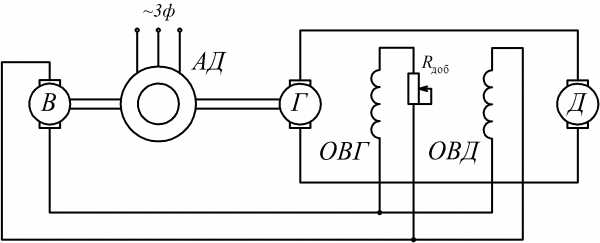
Она состоит из приводного двигателя Д, который механически связан с генератором постоянного тока Г. Величина ЭДС генератора регулируется путем изменения напряжения на обмотке возбуждения генератора. Якоря генератора и двигателя электрически связаны друг с другом. Регулируемым параметром в данном случае выступает величина ЭДС двигателя. Для обеспечения магнитного потока в двигателе и генераторе используется возбудитель, который представляет собой ДПТ меньшей мощности . В настоящее время в качестве возбудителей используются полупроводниковые преобразователи.
Из уравнения равновесия напряжений по второму закону Ома можно составить уравнение ЭДС
,
где  – ЭДС генератора,
– ЭДС генератора, – сопротивления якоря генератора.
– сопротивления якоря генератора.
Подставив в это уравнение и тока двигателя, получаем уравнение мех. хар-к:
.
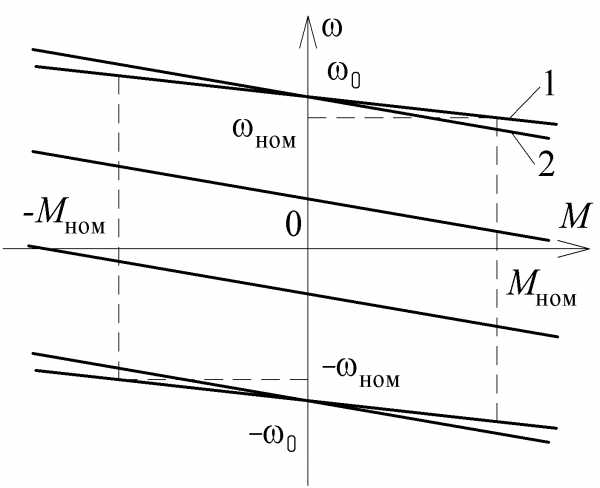
Вид механических характеристик представлен на рис. Относительное падение напряжения в этой системе в вдвое выше (прямая 2), чем у естественной характеристики двигателя (прямая 1). Обуславливается это наличием сопротивления генератора, которое примерно равно сопротивлению якоря двигателя, так как машины примерно одинаковой мощности.
Достоинство - высокая плавность регулирования скорости двигателя.
Недостаток: низкий КПД.
studfiles.net
Структурная схема - электропривод - Большая Энциклопедия Нефти и Газа, статья, страница 1
Структурная схема - электропривод
Cтраница 1
Структурная схема электропривода на рис. 306 отличается от рассмотренной тем, что от преобразователя питается один или несколько синхронных или гистерезисных двигателей. [1]
Структурная схема электропривода ( рис. 4.3) содержит перекрестную связь, обусловленную влиянием ЭДС двигателя, и в таком виде для расчета неудобна. [2]
Структурная схема электропривода по системе Г - Д с суммирующим магнитным усилителем представлена на рис. 2 - 25 а. В схеме обозначены: МУ-магнитный усилитель; fcr, Tr - коэффициент усиления и постоянная времени генератора; КЯ Е и Гя - сопротивление и электромагнитная постоянная якорной цепи; Тм - электромеханическая постоянная электропривода; с - коэффициент ЭДС двигателя; и0 с и иот-напряжения обратных связей по скорости и току якоря. [3]
Структурная схема электропривода, кроме силовых звеньев, содержит системы формирования отпирающих импульсов и фазового управления ими, а также системы регулирования частоты ( скорости) и напряжения. [5]
Структурная схема электропривода на рис. 29 6 отличается от рассмотренной тем, что от преобразователя питается один или несколько синхронных или гистерезисных двигателей. В этом случае для регулирования скорости двигателей с высокой точностью ( до 0 1 %) при любой уставке обратная связь по частоте или скорости не нужна. [7]
Структурная схема электропривода с порошковой муфтой аналогична схеме, показанной на рис. 87, а. [9]
Структурные схемы электропривода определяют основные функциональные части электропривода, их назначение и взаимосвязи. Они разрабатываются при проектировании электропривода на стадиях, предшествующих разработке схем других типов, и используются при анализе и синтезе электромеханической системы электропривода на стадии разработки и для общего ознакомления с электроприводом в условиях эксплуатации. [10]
Структурная схема электропривода ЭТС1 показана на рис. 29.14. В состав электропривода входят преобразователь П, синхронный двигатель М со встроенным комплексным датчиком ПДФ-9 и встроенным тормозом ( или без тормоза), автоматический выключатель AS, токоограничивающий реактор ( Я / и Р2) или силовой трансформатор. [12]
Структурная схема электропривода кроме энергетических звеньев включает в себя системы формирования отпчрающих импульсов и фазового управления ими, а также системы регулирования частоты ( скорости) и напряжения. [13]
При использовании структурных схем электроприводов для синтеза и анализа электромеханической системы внутри прямоугольников, изображающих элементы как линейные динамические звенья, записываются передаточные функции элементов. В нелинейных системах автоматизированных электроприводов часто на структурной схеме изображаются нелинейные характеристики функциональных элементов или их временные характеристики. Они изображаются внутри прямоугольников или на линиях связи. [15]
Страницы: 1 2 3
www.ngpedia.ru
Structural electric scheme - grease monkey
Block diagrams of electric innings and converting different types of control devices (rice. 17).
Step control the speed of the table with exercise gear motor (rice. 17, а), which contains a non-regulated asynchronous motor M AC, associated with the spindle through the gearbox with electromagnetic clutches EM1 and EM2. The drive has a program control of the numerical control system (CNC), receiving signals from the transmitter path (feedback sensor DOS) through the feedback channel OS. At the beginning of the movement of the control system is switched electromagnetic clutch EM1. The motor M rotates the lead screw, With the machine table and starts to progressively move; feedback sensor by turning spindle enables the appropriate number of pulses. When approaching the breakpoint control system sends a signal to shut off the electromagnetic clutch EM1 and EM2 including the electromagnetic clutch, at the same time through the gearbox is slow movement of the table C and full braking the electric drive. This actuator is used only in the positional and rectangular systems of numerical control.
Infinitely variable table with the speed regulation is carried out in a controlled electric drive (rice. 17, б). Electric motor M comprises a constant current with a wide range stepless, which is powered by a powerful static converter P (eg, tiristornogo) and has a management software of the control system, receiving signals from the transmitter through the path of the DOS operating system feedback channel. Power is also used only in the positional and rectangular CNC systems. The above electric circuits used in contour and CNC systems, but used a tracking electric control. electric schemes, DOS converters with movements, called closed.
Stepper electric (rice. 17, at) performs step (discrete) With the movement of the table. It contains a stepper motor stepper motor of low power, Power points in the GUM, kinematic pair screw-nut, associated with the machine table C. Stepper motor control system when applying from each command voltage pulse turns his shaft at a slight angle. Due to the low power stepper motor stepper motor its torque is insufficient to move the table with. Therefore, it works in conjunction with hydraulic torque GUM, which is based on the axial piston motor. This spool valve motor is connected to the motor shaft. In this way, With the amount of movement of the table is determined by the number of pulses, received from the control system. If the electric motor fulfills all the received pulses, the displacement transducer is not needed. Such a system is called open-loop.
Поделиться ссылкой:
Liked this:
Like Loading...
Похожее
tehnar.net.ua
Электропривод как система. Структурная схема электропривода (ЭП).
Стр 1 из 16Следующая ⇒Дисциплина «Электрооборудование промышленности»
СОДЕРЖАНИЕ
1. Электропривод как система. Структурная схема электропривода (ЭП)................................................................................................................................................................................................. 2
2. Механические характеристики производственных механизмов электродвигателей......................................................................................................................................................................... 2
3. Основные уравнения движения механической части электропривода........................................................................................................................................................................................................ 3
4. Элементы проектирования электропривода................................................................................................................................................................................................................................................................ 4
5. Управление координатами в электроприводе постоянного тока при реостатном регулировании...................................................................................................................................... 5
6. Статические характеристики и режимы работы электропривода постоянного тока с независимым возбуждением.......................................................................................... 6
7. Управление координатами в электроприводе переменного тока с фазным ротором...................................................................................................................................................................... 8
8. Основные характеристики и режимы работы электропривода переменного тока............................................................................................................................................................................ 9
9. Электрическая часть силового канала электропривода. Преобразователи частоты в электроприводе............................................................................................................................. 10
10. Импульсные преобразователи в электроприводе................................................................................................................................................................................................................................................... 13
11. Общие принципы управление и классификация систем управления электроприводом......................................................................................................................................................... 14
12. Элементная база информационного канала. Аналоговые регуляторы электропривода.......................................................................................................................................................... 15
13. Синтез структур и параметров информационного канала электропривода с подчиненным регулированием координат......................................................................... 15
14. Цифровые микропроцессорные регуляторы электропривода........................................................................................................................................................................................................................ 17
15. Классификация и особенности полупроводниковых силовых преобразователей электроэнергии........................................................................................................................................ 17
Силовые преобразователи предназначены для преобразования Энергии по роду тока, амплитуде и частоте Классифицируются..................................................................... 17
16. Топология выпрямителей разных типов и особенности их расчета.................................................................................................................................................................................................... 17
17. Инверторы, ведомые сетью, и автономные инверторы. Их расчет и характеристики............................................................................................................................................................... 20
18. Влияние силовых преобразователей на системы электроснабжения, определение их энергетических показателей................................................................................................. 21
19. Электрические печи сопротивления............................................................................................................................................................................................................................................................................ 21
20. Дуговые электрические печи и установки............................................................................................................................................................................................................................................................... 21
21. Индукционные плавильные печи и установки...................................................................................................................................................................................................................................................... 21
22. Общие сведения об электросварке. Источники питания сварочной дуги. Машины для точечной и роликовой сварки...................................................................................... 21
23. Электролиз и его промышленное применение. Гальванические установки....................................................................................................................................................................................... 21
24. Основные характеристики электропривода с синхронным двигателем.............................................................................................................................................................................................. 21
25. Расчет входных и выходных фильтров силовых преобразователей электроэнергии........................................................................................................................................................................ 23
26 Статические характеристики и режимы работы электропривода постоянного тока с зависимым возбуждением.......................................................................................... 23
27. Управление координатами в асинхронном электроприводе с короткозамкнутым ротором........................................................................................................................................... 25
28. Элементная база информационного канала. Цифровые интегральные микросхемы................................................................................................................................................................. 26
29. Синтез дискретных управляющих автоматов................................................................................................................................................................................................................................................... 27
30. Управление координатами в системе преобразователь (источник ЭДС) – двигатель постоянного тока..................................................................................................................... 28
31. Управление координатами электропривода постоянного тока по цепи возбуждения............................................................................................................................................................. 30
32. Вольт-амперная характеристика электрической дуги и ее зависимость от длины дуги.................................................................................................................................................... 30
33. Назначение и устройство магнитных пускателей. Их обозначение на электрических схемах.......................................................................................................................................... 30
34. Автоматический выключатель сети. Его назначение и основные параметры............................................................................................................................................................................... 31
35. Реле времени с электромагнитным замедлением.............................................................................................................................................................................................................................................. 32
Электропривод как система. Структурная схема электропривода (ЭП).
ЭП – это управляемая Эл. Механическая система для преобразования электрической энергии в механическую и автоматизации технологических процессов.
ЭП как система состоит из 2х каналов: силовой канал ЭП предназначен для передачи и преобразования энергии и состоит из электрической и механической части.
Информационный канал ЭП управляет потоком энергии, производит сбор и обработку данных о состоянии системы и диагностику её неисправностей.
Электрическая часть силового канала состоит из: системы электроснабжения(СЭС), электрических преобразователей (ЭП), и электрической части электромеханического преобразователя (ЭМП).
К СЭС относится линии электропередач, аппаратуру защиты и коммутации.
ЭП могут состоять из трансформаторов, электронных и электромеханических преобразователей, преобразователей Эл. Энергии по роду тока, по амплитуде и частоте.
К ЭМП относится электродвигатели постоянного и переменного тока, электромагнитные муфты и тормоза.
Электромеханическая часть силового канала состоит из: ЭМП (ротора), механического преобразователя (МП) редуктора, рабочего органа (РО), технологических установки.
В состав информационного канала входит: автоматизированная система управления (АСУ), предназначена для формирования управляющих сигналов в соответствие с заданной программой и сигналами информационных преобразователей (ИП).
АСУ включают в себя аналоговые и цифровые сигналы, промышленные компьютеры и контроллеры. ИП включают в себя датчики сигналов, их усилители и преобразователи.
ЭП обеспечивает сопряжение АСУ с силовым каналом.
Истории и тенденции развития электропривода
Основные направления развития электропривода.
1) использование более совершенных электродвигателей. Используются бесконтактные, высокомоментные двигатели с более высоким КПД при меньшей массе.
2) совершенствование полупроводниковой моментной базы, внедрение новых типов тиристоров и транзисторов.
3) расширение функциональных возможностей электропривода: повышение точности и быстродействия, улучшение систем диагностики и защиты.
4) увеличение объёма информации поступающей в электропривод для улучшения управления.
5) развитие систем цифрового и микропроцессорного управления электроприводом.
6) приближение двигателей к исполнительному органу за счёт упрощения МП (мех. преобразователя)
©2015 arhivinfo.ru Все права принадлежат авторам размещенных материалов.
arhivinfo.ru
Структурная схема электропривода
ОСНОВЫ ТЕОРИИ ЭЛЕКТРОПРИВОДА
ВВЕДЕНИЕ
Производственные агрегаты состоят из большого, отдельных машин аппаратов и деталей, выполняющих различные функции. Все части агрегатов в совокупности совершают работу, которая обеспечивает какой либо производственный процесс. Любой производственный агрегат или машинное устройство состоит из трёх основных частей: двигателя (служит для получения механической энергии), передаточного механизма (служит для пердачи механической энергии от двигателя) и исполнительного механизма, выполняющего производственный процесс (крыльчатка вентилятора, барабан лебёдки, брашпиль и т.д.) [1]. Исполнительный механизм так же называют рабочим органом.
Первые два элементасложного производственного агрегата служат для приведения в движение исполнительного механизма, поэтому их обьединяют под общим названием привод .
Примером первого, простейшего привода является ручной привод ( человек рукой приводил в движение устройство для совершения полезной работы), затем появился конный привод (усилие человека заменено тяговой силой животного). На смену им пришёл механический привод , в котором механическая энергия пердавалась от ветряного, водяного колеса, паровой турбины, двигателя внутреннего сгорания.
В настоящее время для приведения в движение большинства рабочих машин применяется электрический двигатель и основным типом привода является электрический привод или электропривод .
ТЕМА ЛЕКЦИИ 1
Основные понятия электропривода
ПЛАН ЛЕКЦИИ
Структурная схема электропривода
Общая классификация электроприводов
Классификация судовых электроприводов
Структурная схема электропривода
Электрический привод представляет собой электромеханическую систему , предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением.
В общем случае электропривод состоит из 4-х устройств ( рис.1.1 ):
1. преобразовательное;
2. электродвигательное;
3. передаточное;
управляющее.
Преобразовательноеустройство предназначено для преобразования рода тока, напряжения и частоты тока питающей сети и передачи преобразованных параметров сети в электрическую часть электропривода. Поэтому оно включается между питающей сетью и электрической частью электропривода.
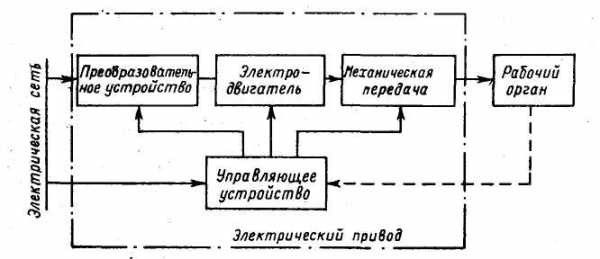
Рис. 1.1. Структурная схема электропривода
В качестве преобразовательных устройств используются:
1. для преобразования рода тока – выпрямители , преобразующие переменный ток в постоянный;
2. для преобразования напряжения – трансформаторы , преобразующие переменное напряжение одного значения в переменное напряжение другого значения той же частоты;
3. для преобразования частоты тока – преобразователи частоты, преобразующие переменный ток одной частоты в переменный ток другой, регулируемой частоты.
4. для преобразования напряжения – инверторы , преобразующие постоянное напряжение в пременное регулируемой амплитуды и частоты
Рассмотрим поочередно преобразовательные устройства.
studlib.info
Структурная схема и управление электроприводом
Ульяновский Государственный Технический Университет
Кафедра «Электропривод и автоматика ПУ и ТК»
Курсовая работа
по дисциплине
Теория автоматического управления
Структурная схема и управление электроприводом
Выполнил: ст. гр.Ад-41
Сапунов Н.Е.
Ульяновск 2010
Содержание
Описание задания на курсовую работу
1. Описание САУ переменного тока
2. Статические характеристики САУ переменного тока
2.1 Математическое описание преобразователя частоты (ПЧ) с промежуточным звеном постоянного тока на основе АИН
2.2 Математическое описание асинхронного двигателя при управлении частотой и напряжением статора
2.3 Статические характеристики САУ на основе АД
2.3.1 Статические характеристики САУ при
2.3.2 Статические характеристики САУ при
2.3.3 Статические характеристики САУ при вентиляторной нагрузке
3. Динамические характеристики САУ переменного тока
4. Анализ устойчивости САУ
4.1 Критерий устойчивости Гурвица
4.2 Критерий устойчивости Найквиста
4.3 Критерий устойчивости Михайлова
4.4 Построение ЛАЧХ и ФЧХ
5. Расчет переходного процесса
6. Вывод
7. Список литературы
Описание задания на курсовую работу
Целью данной курсовой работы является получение практических навыков по построению структурной схемы для системы «Управляемый выпрямитель - автономный инвертор напряжения – асинхронный двигатель», и ее дальнейшее упрощение с целью получения передаточной функции по управляющему воздействию (Δxf и Δxu ). Проверка системы автоматического управления с помощью критериев устойчивости. И построение графиков переходного процесса.
Исходные данные:
САУ переменного тока. Настройка на симметричный оптимум.
1. Описание САУ переменного тока
Развитие полупроводниковой преобразовательной техники привело к широкому использованию электроприводов с электродвигателями переменного тока, к созданию новых систем управления этими электродвигателями. По сравнению с системами управления электроприводами постоянного тока системы управления электроприводами переменного тока значительно более разнообразны. В регулируемых электроприводах используются асинхронные электродвигатели с короткозамкнутым или фазным ротором, синхронные и вентильные электродвигатели. Применяются различные способы регулирования скорости электродвигателя путем изменения: напряжения статора, частоты и напряжения статора, частоты и напряжения ротора, добавочного сопротивления в цепи ротора и др. Используется значительно большее число регулируемых координат, чем в электроприводах постоянного тока. Вместе с тем имеются определенные ограничения в использовании того или иного способа управления и созданной на основе этого способа системы управления электродвигателем. Все эти обстоятельства затрудняют формирование общих подходов к синтезу АСУ ЭП переменного тока в такой степени, как это было сделано в АСУ ЭП постоянного тока.
Управление электродвигателями переменного тока осложнено рядом обстоятельств, наиболее существенными из которых являются следующие: 1) момент электродвигателя определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных; 2) имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора; 3) с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Электродвигатели переменного тока совместно с управляемыми преобразователями представляют собой сложные многосвязные нелинейные объекты управления. Полное математическое описание таких объектов оказывается довольно громоздким и неприменимым для инженерных методов синтеза систем управления. Вместе с тем в практике построения систем электроприводов, включая и АСУ ЭП переменного тока, получили распространение простые приемы синтеза систем управления, основанные на принципах подчиненного управления и на использовании унифицированных настроек контуров регулирования, входящих в систему управления. Использование этих приемов позволяет не только просто выполнить синтез систем управления, но и создает обоснованную возможность упрощения математического описания электроприводов переменного тока, в частности возможность пренебрежения взаимосвязью ряда координат и параметров электроприводов.
Основная сложность при создании АСУ ЭП переменного тока заключается в создании независимого управления электромагнитным моментом и потоком двигателя. Если это удается выполнить, то АСУ ЭП переменного тока с обратными связями по скорости или по положению выполняются точно так же, как и АСУ ЭП постоянного тока, включая и способы управления пусковыми и тормозными режимами.
При синтезе взаимосвязанных систем управления используются два основных приема, обеспечивающих автономность (независимость) контуров регулирования: а) использование различного рода дополнительных компенсационных связей между локальными контурами регулирования; б) разделение локальных контуров регулирования по быстродействию. Оба этих приема используются при выполнении АСУ ЭП переменного тока, и это дает основание уже на стадии формирования математической модели электропривода делать ряд упрощений.
2. Статические характеристики САУ переменного тока
2.1 Математическое описание преобразователя частоты (ПЧ) с промежуточным звеном постоянного тока на основе АИН
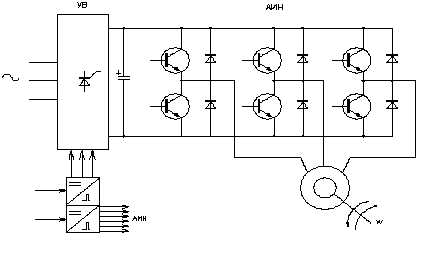
УВ – управляемый выпрямитель, отвечает за напряжение подаваемое на асинхронный двигатель;
АИН – автономный инвертор напряжения, отвечает за частоту подаваемого напряжения на асинхронный двигатель.
Функциональная схема преобразователя частоты
Исходное дифференциальное уравнение
Запишем эти уравнения в операторной форме
Структурная схема ПЧ на основе АИН.
2.2 Математическое описание асинхронного двигателя при управлении частотой и напряжением статора
При исследовании переходных процессов в трехфазных асинхронных электродвигателях целесообразно принять следующие допущения, позволяющие в доступной математической форме выразить соотношения основных параметров и координат электродвигателя:
1) намагничивающие силы обмоток двигателя распределены синусоидально вдоль окружности воздушного зазора;
2) потери встали статора и ротора отсутствуют;
3) обмотки статора и ротора строго симметричны со сдвигом осей обмоток на 120°;
4) насыщение магнитной цепи отсутствует.
Уравнения равновесия напряжений для обмоток трех фаз статора имеют вид
(1)Соответственно для обмоток трех фаз ротора
(2)Где
— мгновенные значения фазных напряжений статора и ротора; — мгновенные значения фазных токов статора и ротора; - полные потокосцепления фазных обмоток;R1 , R2 — активные сопротивления обмоток статора и ротора.
Асинхронный электродвигатель представляет собой систему магнитно-связанных обмоток, расположенных на статоре и роторе. При вращении ротора взаимное положение обмоток статора и ротора непрерывно изменяется, соответственно изменяется и взаимная индуктивность между ними. С учетом принятых допущений можно считать, что взаимная индуктивность пропорциональна косинусу текущего угла между осями обмоток ротора и статора.
При математическом описании трехфазных асинхронных двигателей удобно оперировать не мгновенным значениями координат, а их результирующими векторами. Если, например, мгновенные значения токов равны ia , ib , ic , то результирующий вектор тока определяется уравнением:
,Где a0 =ej0 =1; a=ej2π/3 ; a2 = ej4π/3 .
Аналогично определяются результирующие векторы напряжения
и потокосцепления
Используя выражения результирующих векторов, уравнения (1) можно записать в виде одного дифференциального уравнения в векторной форме. Для этого первое уравнение из (1) умножается на 2/3a0 , второе на 2/3a, третье на 2/3a2 . Суммируя полученные произведения, получим
mirznanii.com
Цифровые системы управления электроприводами структурная схема цифровой системы управления
ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИСтруктурная схема цифровой системы управления
Рост степени интеграции в микропроцессорной технике и создание микроконтроллеров с встроенным набором специализированных периферийных устройств сделали необратимой тенденцию перехода систем управления электроприводами к прямому цифровому управлению. При этом имеет место непосредственное управление от микроконтроллера каждым ключом силового преобразователя и прямой ввод в микроконтроллер сигналов обратных связей (дискретных, аналоговых, импульсных) с их последующей программно-аппаратной обработкой контроллером.
Особенностью цифровых систем управления является наличие квантователя сигналов по уровню в цепях обратных связей, в цепях параллельной коррекции и в ряде случаев в устройстве задающего сигнала. Погрешность цифровых устройств не превышает величины единичного значения младшего разряда кода, с которым эти устройства оперируют. Кроме квантования по уровню цифровым системам присуще квантование по времени. Период (такт) временного квантования То для большинства систем лежит в пределах 0,001-0,01 с. Очевидно, что если поставлена задача обеспечения высокого качества управления, такт квантования следует выбирать как можно меньшим. При выборе такта квантования следует учитывать следующие факторы:
- требуемое качество управления;
- динамику объекта управления;
- спектры возмущений;
- тип электропривода;
- измерительные устройства.
Преимущество цифровых регуляторов заключается в реализации любой требуемой передаточной функции, возможности введения адаптации, нелинейной коррекции.
Обобщенная функциональная схема цифровой системы регулирования представлена на рис. 28.1.
На рисунке: 1 - задающий квантователь; 2 - квантователь обратной связи; 3 - дискретная передаточная функция цифрового регулятора; 4 - звено с чистым запаздыванием, отражающее конечное время вычислений в регуляторе; 5 - непрерывная передаточная функция объекта управления; 6 - квантователь цепи параллельной коррекции.
Передаточная функция корректирующего дискретного регулятора в общем виде записывается следующим образом
Значения коэффициентов находят из выражения
где Wo (z) - дискретная передаточная функция объекта управления, полученная с помощью таблиц z - преобразования, Ф(z) - желаемая дискретная передаточная функция системы в замкнутом состоянии.
Функция Ф(z) должна быть реализуема. Для этого она должна представлять собой отношение двух полиномов относительно z-1 с действительными коэффициентами, причем свободный член в знаменателе должен быть отличным от нуля, а модуль степени полинома числителя должен быть больше, чем у знаменателя. При применении микропроцессоров стоимости цифровых и аналоговых систем управления практически не отличаются. Подробный анализ элементов цифровой системы управления представлен ниже.
28.2. Последовательные цифровые корректирующие звенья
Цифровые регуляторы тока. При разработке цифровой системы регулирования тока якоря электродвигателя необходимо выбирать такт работы регулятора тока и тип преобразователя напряжение - код в цепи обратной связи по току, учитывая дискретность работы тиристорного или транзисторного преобразователей . Для обеспечения такого же быстродействия, как и для аналогового регулятора рекомендуют значение принимать меньше в целое число раз.
Для преобразователя напряжение-код, фиксирующего мгновенные значения тока, среднее значение тока якоря в установившемся режиме будет отличаться от заданного, причем ошибка равна погрешности численного интегрирования. Например, при интегрировании методом трапеций ошибка зависит от числа узлов . Если условие = ц.ч. не соблюдается, то в соседних интервалах дискретности регулятор будет срабатывать неодинаковое число раз, что приведет к появлению колебаний значений тока обратной связи.
Сигнал, снимаемый с датчика тока, как правило, содержит высокочастотные помехи. Поэтому преобразователь напряжение- код должен обладать сглаживающими свойствами. Рекомендуется применять АЦП интегрирующего или следящего типа. Наличие пульсаций тока якоря требует специальной организации измерений. В настоящее время применяют:
- измерение максимума тока на периоде То,
- измерение среднего тока за период То,
Структурная схема контура тока представлена на рис. 28.2.
Обозначения, принятые на структурной схеме:
D(z) - передаточная функция регулятора тока;
Wo.c(p) - передаточная функция датчика тока и корректирующего устройства цепи обратной связи;
F - коэффициент, учитывающий влияние пульсаций выходного напряжения преобразователя;
- время запаздывания, равное времени вычислений в регуляторе. Значение ;
- угол запаздывания, появляющийся за счет сдвига между границами и . Значение равно случайной величине на отрезке [0, ].
Цифровые регуляторы скорости. Система регулирования частоты вращения может выполняться с подчиненным регулятором тока, аналоговым или цифровым, так и без него. Указанные варианты исполнения представлены в [19]. Значительное влияние на характеристики системы регулирования оказывает способ измерения частоты вращения. Цифровые регуляторы скорости рекомендуются для систем жесткого поддержания частоты вращения, так как от дрейфа нуля аналоговых PC полностью избавиться не представляется возможным. Структурная схема контуров тока и частоты вращения представлена на рис. 28.3
Обозначения, принятые на структурной схеме:
Dc(z) - передаточная функция регулятора скорости;
- передаточная функция датчика частоты вращения и корректирующего устройства цепи обратной связи;
В целях упрощения организации вычислений рекомендуется принимать, где - целое число. Часто принимают .
Цифро-аналоговый регулятор скорости состоит из параллельно работающих аналогового и цифрового регуляторов.
Цифровые регуляторы положения.
Регуляторы положения цифрового типа выполняются на базе микропроцессоров или мини-ЭВМ. Разрядность цифровых устройств (датчика, преобразователя кодов, регистров, арифметического устройства и др.) зависит от максимального значения рабочего пути и точности позиционирования. Число разрядов
В системах с цифровыми регуляторами положения контур положения замыкается дискретно по времени с периодом , то есть через равные интервалы времени происходит сравнение задающего воздействия и сигнала обратной связи и выработка управляющего воздействия на контур скорости. Так как в течение интервала управляющее воздействие остается неизменным, то эффект квантования по времени может быть учтен введением в контур положения фиксатора нулевого порядка. Передаточная функция фиксатора нулевого порядка вместе с импульсным элементом имеет вид
Влияние квантования по времени сказывается в снижении предельно допустимой добротности контура положения .
Позиционные системы с нелинейным регулятором положения. Для увеличения коэффициента усиления РП в зоне малых отклонений для электроприводов, работающих в широком диапазоне заданий на перемещение, рекомендуется применение регулятора параболического типа. Характеристика параболического регулятора является геометрическим местом точек переключения, в которых постоянно выполняется равенство
где - частота вращения привода при торможении; - ошибка по перемещению; -замедление привода, определяемое коэффициентом усиления параболического регулятора; - коэффициент связи между перемещением и частотой вращения.
Так как коэффициент усиления РП в зоне малых рассогласований стремится к бесконечности, то система регулирования является неустойчивой. Для исключения режима автоколебаний начальный участок параболического регулятора делается линейным, рис. 28.4 (отрезок ОА кривая 1).
Отработка заданного перемещения может происходить с перерегулированием по положению, что в большинстве случаев недопустимо. Для исключения перерегулирования коэффициент усиления РП должен быть уменьшен так, чтобы после вхождения в зону линейного участка траектория движения системы попадала в точку нулевого рассогласования или пересекалась с характеристикой линейного участка, что означает работу электропривода в скользящем режиме.
Если перерегулирование по положению лежит в пределах допустимого, то выбор зазоров в механической передаче можно исключить, выполнив регулятор положения с зоной нечувствительности (отрезок ОВ кривая 2) при некотором смещении характеристики вдоль оси абсцисс. Зона нечувствительности определяется разрешающей способностью датчика положения.
Необходимость использования регулятора положения с нелинейной характеристикой может быть исключена путем задания такого закона управления , при отработке которого система остается во всех режимах линейной.
28.3. Параллельные корректирующие звенья
Коррекция коэффициента передачи привода. Структурная схема цифрового электропривода с цифровым нелинейным корректирующим устройством (НКУ) в главной цепи, изменяющим коэффициент усиления разомкнутой системы, представлена на рис.28.5 .
НКУ включает в себя анализирующее устройство АУ, которое является логическим устройством, подвергающим анализу входные и выходные сигналы привода, а также сигнал ошибки и вырабатывающим сигнал управления , изменяющий коэффициент усиления (передачи) системы . Очевидно, что, меняя алгоритм вычисления сигнала , системе можно придать различные свойства.
Компенсация ошибки по управляющему воздействию. При изменяющемся входном сигнале важным средством повышения точности следящего электропривода является использование принципа комбинированного управления, при котором в систему управления вводятся дополнительные сигналы по управляющему воздействию. Средства коррекции могут быть дискретными или непрерывными (аналоговыми), линейными или нелинейными, комбинированными. Ряд структур цифровых систем с параллельной коррекцией представлен на рис. 28.6.
Рассмотрим передаточную функцию схемы, представленной на рис. 28.6, б
Очевидно, что при ошибка управления равна нулю и передаточная функция комбинированной системы равна 1, так что эта система превращается в идеальную следящую систему. Значения передаточных функций корректирующих устройств, представленных на рис. 28.6, при которых выполняется условие инвариантности, имеют вид
где , , - передаточные функции звеньев в прямой цепи системы, - передаточная функция устройства, формирующего компенсирующие сигналы, обеспечивающие инвариантность ошибки системы регулирования.
Передаточная функция может быть обратна передаточной функции или W2, которые содержат интегрирующий элемент (например, передаточную функцию электродвигателя). В связи с этим передаточная функция связи по задающему воздействию, соответствующая абсолютной инвариантности, оказывается физически нереализуемой, а абсолютная инвариантность недостижима. Производят замену физически нереализуемой функции близкой к ней физически реализуемой передаточной функцией, что дает возможность создать квазиинвариантную систему, мало отличающуюся от инвариантной по точности управления.
Условия полной инвариантности выполняются, если выражения (28.6)-(28.8) представляют собой безынерционные звенья. В реальных условиях передаточные функции системы всегда имеют инерционные звенья. В этом случае для полной инвариантности в систему необходимо ввести не только первую, но вторую, третью и более высшие производные от задающего сигнала. Такая ковариантная система представлена на рис. 28.7.
Коэффициенты компенсационных связей могут быть рассчитаны по следующим выражениям
где - расчетная частота, равная полосе пропускания системы, С - коэффициент оптимизации электропривода.
Однако на практике получение высших производных встречает некоторые трудности. Часто ограничиваются ведением в систему первой производной управляющего сигнала, обеспечивающего системе астатизм второго порядка относительно задания по перемещению. При отработке задания, изменяющегося с постоянной скоростью, в установившемся режиме скоростная ошибка отсутствует. Для большинства систем этого вполне достаточно. При ограничении числа слагаемых по производным их выбирают исходя из того, чтобы ошибка системы не превышала допустимую.
Рассмотрим цифровой регулятор положения с интерполяцией задаваемой траектории движения, рис. 28.8.
На рисунке:
Dl(z) - блок вычисления интерполяционного полинома (28.10),
D2(z) - блок вычисления управляющего воздействия, пропорционального первой производной от входного сигнала,
D3(z) - блок вычисления управляющего воздействия, пропорционального второй производной от входного сигнала.
При изменении заданного угла поворота с ускорением рекомендуется интерполировать текущее значение угла полиномом второй степени
где - период дискретности поступления задающих сигналов от управляющей ЭВМ, - период дискретности поступления управляющих сигналов от цифрового регулятора положения на аналоговую часть системы, - расчетное значение приращения сигнала управления на -интервале.
Исследования показали, что соответствующим выбором значений коэффициентов и , можно уменьшить ошибку от управляющего воздействия для нуля. При и цифровой следящий электропривод обладает инвариантностью относительно управляющего воздействия.
Представляют интерес схемы параметрически инвариантных компенсационных систем управления, сочетающие последовательные и параллельные корректирующие цепи, рис. 28.9.
Компенсация ошибки по возмущающему воздействию. Снижение влияния возмущающих воздействий (момента нагрузки на валу электродвигателя) возможно осуществить за счет введения дополнительного контура по возмущающему воздействию, рис. 28.10.
При этом условием абсолютной инвариантности для рассматриваемой структуры будет равенство
Очевидно, что возмущение воздействует на систему по двум каналам: во- первых, непосредственно и, во-вторых, через последовательно соединенное звено и исполнительное устройство . При выполнении условия (28.11) сумма этих воздействий равна нулю и достигается компенсация внешнего воздействия.
Анализ показывает, что для достижения полной инвариантности по моменту компенсирующая связь должна вводить в систему сигнал, пропорциональный моменту сил сопротивления и его производной, то есть выполнять функции ПД-регулятора. Проблема реализации такой обратной связи осложняется необходимостью применения датчиков момента, встройка которых в механическую систему электропривода сопряжена с трудностями. В связи с этим используют методы косвенного измерения (расчета) момента статического сопротивления. Для получения высокой точности управления с косвенным измерением возмущающего воздействия рекомендуется применение дифференциальных связей ("вилок"). Принцип косвенной оценки возмущений рассмотрен на рис. 28.11.
Разность величин есть сигнал, являющийся функцией возмущения , а именно . При сигнал численно равен возмущению .
Структурные схемы с прямой и обратной компенсирующими связями при косвенной оценке возмущающего воздействия представлены на рис. 28.12 и рис. 28.13. В системе (рис. 28.12) два канала воздействия возмущающего сигнала на выходную регулируемую координату . Условие инвариантности системы
На рисунке: - передаточная функция предварительного усилителя.
При обратной компенсирующей связи условие инвариантности достигается при
Следует иметь в виду, что при использовании принципа компенсации необходимо всегда проводить анализ устойчивости свободного движения системы.
Компенсация помех от квантования по уровню и времени. В цифровых системах управления эффект квантования может проявиться следующим образом:
- возникает статическая ошибка по положению, когда контуруправления не возвращается в устойчивое нулевое состояние;
- в контуре управления вырабатывается дополнительный случайный сигнал - шум квантования;
- возникает предельный цикл с малой амплитудой и некоторым периодом повторения, накладывающийся на управляющую переменную.
Предотвратить появление межтактовых колебаний можно в случае, когда передаточная функция системы принимает вид
где - передаточная функция объекта управления, - коэффициент передачи объекта управления.
Структурная схема устройства приведена на рис. 28.14 - следящего цифрового электропривода с псевдолинейным цифровым фильтром, включающим в себя экстраполирующее устройство и индикатор нулевого сигнала, предназначенные для сглаживания эффектов квантования. Там же приведены эпюры выходных сигналов следящего электропривода при учете квантования по времени и уровню и без такого учета.
На схеме: МОД - блок выделения модуля сигнала рассогласования; ССК - схема сокращения кода, предназначена для уменьшения разрядности выходного сигнала фильтра , позволяет упростить схему всего корректирующего устройства; ИН - индикатор нулевого сигнала.
Экстраполятор включает в себя регистр памяти РП, в котором хранится предыдущее значение входного сигнала , цифровой сумматор, на выходе которого получают модуль и знак первой разности входного сигнала , управляемый делитель частоты УДЧ (частота выходных импульсов которого пропорциональна модулю ) и реверсивный счетчик PC, в который в начале цикла работы записывается число , и режим работы которого (сложение или вычитание) определяется знаком числа . Экстраполирующее устройство существенно ослабляет эффект квантования по времени, что в первую очередь сказывается на многократном снижении максимального перерегулирования. Ослабление эффекта квантования по уровню достигается введением индикатора нулевого сигнала, на вход которого подается первая разность сигнала ошибки Vs и выходной сигнал которого запрещает изменение информации при (то есть замораживает знак сигнала при отсутствии изменения сигнала у).
Очевидно, что наилучшим путем устранения нежелательных явлений связанных с квантованием по уровню является выбор ЦАП и АЦП с достаточно большой разрядностью слов.
Компенсация люфта. Если датчик положения находится на валу электродвигателя и нелинейность типа люфта не охвачена обратной связью по положению, то люфт не оказывает значительного влияния на динамические характеристики электропривода, но приводит к появлению статической ошибки позиционирования исполнительного механизма. Если датчик положения находится непосредственно на валу объекта управления, то люфт не влияет на статическую ошибку, однако, наличие люфта в редукторе оказывает существенное влияние на динамику системы, особенно при малых амплитудах сигнала. Известно, что люфт может привести к потере устойчивости и резкому ухудшению динамических показателей ЭМС. Математическая модель люфта имеет вид
где - выходная величина нелинейного кинематического звена, х -входная величина нелинейного звена, - люфт.
Очевидно, что для компенсации люфта к выходному сигналу у следует прибавить величину, равную . Схема нелинейного компенсирующего устройства (НКУ) имеет вид, показанный на рис. 28.15.
На рисунке: НЭ -нелинейный элемент, вводимый в структурную схему ЭМС для учета люфта в кинематической системе.
Физическая реализация нелинейного компенсирующего устройства может осуществиться с помощью тахогенератора (вырабатывающего сигнал ), нуль-органа (вырабатывающего сигнал знака ) и цифрового сумматора, корректирующего сигнал обратной связи у, снимаемый с датчика положения, на величину .
Компенсация сухого трения Одним из существенных факторов, отрицательно влияющих на эффективность работы электромеханической системы, является сухое трение. Особенно нелинейность сухого трения сказывается при реверсе с малой скоростью. Если статическую ошибку, обусловленную силами сухого трения, не удается довести до величины, меньшей допустимой зоны нечувствительности, то приходится прибегать к специальным мерам по устранению влияния этих сил. Применение микропроцессорных устройств в адаптивных и оптимальных системах управления электроприводами позволяет существенно повысить качество переходных процессов в электромеханических системах. Рассмотрим схему компенсации сухого трения, представленную на рис. 28.16.
На рисунке: - передаточная функция следящей системы, преобразующая входное управляющее напряжение в момент вращения ; - передаточная функция элементов привода, охваченных нелинейной обратной связью, обусловленной моментом сухого трения ; - оценочное значение момента сухого трения.Момент сопротивления типа сухого трения можно описать следующим образом
где , , , - случайные параметры.
Момент сопротивления компенсируется его оценкой , полученной в результате наблюдения процесса и обработки этого сигнала в блоке "Система оценки".
где - сигнал, определяемый сухим трением, - внутренний шум системы, который можно представить в виде белого шума.
где - текущая погрешность оценки сухого трения, равная
Квазиоптимальные уравнения оценки момента сопротивления сухого трения
где - время наблюдения, - среднее значение начального момента сопротивления при отрицательной скорости, - среднее значение начального момента сопротивления при положительной скорости.
Рассмотренная схема компенсации сухого трения применена при разработке ряда квазиоптимальных систем.
Коррекция коэффициента передачи в цепи обратной связи. В качестве примера рассмотрим структурную схему следящего электропривода с переменным коэффициентом передачи в цепи обратной связи по скорости, рис. 28.17. Обозначения и назначение элементов схемы аналогичны с приведенными ранее.
Анализирующее устройство вырабатывает сигнал , изменяющий по определенному закону коэффициент передачи в цепи обратной связи по скорости в зависимости от входной информации и ошибки управления. Рекомендуется для коррекции использовать сигнал, пропорциональный модулю ошибки управления.
Цифровой регулятор прямого цифрового управления электроприводом постоянного тока. Структурная схема регулятора представлена на рис. 28.18.
На рисунке: ЦФП - цифровой функциональный преобразователь, выполняющий экстраполяцию задающего воздействия в промежутках между моментами его поступления на вход системы управления при , а также вычисляющий первую и вторую производную входного сигнала; -задающий сигнал от управляющей ЭВМ; - сигнал обратной связи от датчика положения.
Регулятор имеет контуры пропорционального, интегрального и дифференциального регулирования по ошибке управления с нелинейным элементом в основной цепи управления, выполняющим функцию ограничения выходного сигнала.
Регулятор имеет компенсирующие цепи по первой и второй производной входного сигнала. Повышение запаса устойчивости обеспечено с помощью демпфирующих обратных связей по первой и второй производным регулируемой координаты (сигнала датчика положения). Такие регуляторы рекомендуются для систем контурного управления.
Цифровые регуляторы позволяют упростить возможность изменения законов управления электроприводом в зависимости от режима работы, предусмотреть в алгоритмах управления выполнение операций контроля его нормального функционирования и защиты от аварийных ситуаций. Подобные цифровые регуляторы имеют, например, промышленные роботы "Электроника НЦТ-30".
28.4. Динамические регуляторы
Наилучшими техническими характеристиками среди линейных регуляторов обладают ПИД-регуляторы. Однако и им присущи недостатки. При резком изменении параметров системы они зачастую теряют работоспособность. Они не обладают требуемым стабилизирующим эффектом, вследствие чего динамическая ошибка имеет незатухающий колебательный характер и заданная точность контурного управления не достигается. Это поставило задачу разработки более совершенных систем программного управления, свободных от недостатков локальных серво-регуляторов, Эти системы должны учитывать в явном виде (в структуре регулятора) динамику исполнительной системы. Отличительной чертой таких регуляторов является то, что при выборе структуры регулятора используются полные уравнения динамики. В результате структура регулятора оказывается вполне адекватной структуре динамической модели объекта управления. Схема электромеханической системы с динамическим регулятором представлена на рис. 28.19.
На рисунке: РКУ - блок расчета коэффициентов усиления, ШИП - широтно-импульсный преобразователь, УМ - усилитель мощности, ДПТ - двигатель постоянного тока, МР - механический редуктор, ОУ - объект управления, ДП - датчик положения.
Уравнение динамического регулятора имеет вид
где: , - заданные матрица функция размерности и вектор функция размерности , определяемые особенностями ЭМС, - вектор параметров ЭМС размерности ; , - коэффициенты усиления, причем, из условия устойчивости необходимо соблюдать следующие неравенства
Выбирая параметры усилителей из условия (28.19) можно обеспечить не только асимптотическую устойчивость системы в целом и желаемое качество управления, но и любой желаемый запас устойчивости. Последнее важно с точки зрения придания динамическому регулятору свойства нечувствительности (инвариантности) по отношению к действию параметрических возмущений.
Микропроцессор выполняет функции программатора, вычисляя задающие сигналы; дифференциатора, вычисляя по сигналу обратной связи его первую и вторую производные; расчета коэффициентов усиления , ; цифрового регулятора, вырабатывая управляющий сигнал .
Динамические регуляторы особенно удобны для создания адаптивных регуляторов. В этом случае к системе управления (рис. 28.19) добавляются адаптатор и эстиматор, выполняемые программно. Это управление уменьшает влияние на процесс слежения переменности момента инерции.
fs.nashaucheba.ru





Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






