
Тиристорные электроприводы постоянного тока | Эксплуатация крановых тиристорных электроприводов
Страница 6 из 15
ПРИНЦИП РАБОТЫ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Тиристорные преобразователи постоянного тока являются устройством, преобразующим переменное напряжение питающей сети в выпрямленное регулируемое напряжение посредством фазоимпульсного управления тиристорами. Для пояснения принципа работы преобразователя на рис. 9 приведены схема трехфазного нулевого преобразователя, подключенного на якорную систему двигателя постоянного тока М, а на рис. 10 — диаграммы изменения токов и напряжений. Питание преобразователя осуществляется от сети через трансформатор Т с напряжением на вторичных обмотках Щ-Щ или через токоограничивающий дроссель. Регулирование средних значений выпрямленного напряжения осуществляется тиристорными блоками VS1-VS3 путем изменения системой фазоимпульсного управления (СИФУ) угла включения тиристоров а или р в зависимости от режима работы. Тиристор переводится в проводящее состояние при положительном потенциале между анодом и катодом импульса управления на его базу.
Рис. 9. Схема трехфазного нулевого преобразователя постоянного тока
Поскольку, как видно из схемы рис. 9, аноды тиристоров соединены между собой, включаться может только тот тиристор, потенциал катода которого наибольший. Точка перехода потенциала анод-катод тиристоров через нуль определяет момент естественного включения тиристоров, от которого и отсчитывается угол включения. Преобразователь может работать в выпрямительном или в инверторном режиме. В выпрямительном режиме ток /п и напряжение Un на выходе преобразователя совпадают по направлению и двигатель потребляет из сети энергию. В инверторном режиме направления тока и напряжения противоположны и энергия от двигателя, работающего как генератор, передается в сеть. Перевод преобразователя из выпрямительного в инверторный режим осуществляется посредством увеличения угла а сверх л/2. При этом
разность
Рис. 10. Диаграммы выходных напряжений и токов соответственно в выпрямительном и инверторном режимах:

а — диаграмма напряжения выпрямительного режима; б —_ диаграмма выходного тока выпрямительного режима; в — диаграмма выходного напряжения инверторного режима; г — диаграмма тока инверторного режима
Для обеспечения режима инвертирования необходимо, чтобы закрывающийся тиристор успел восстановить свои запирающие свойства в течение времени приложения к нему отрицательного напряжения, т.е. в пределах угла ф (рис. 10, в). В противном случае возможно опрокидывание преобразователя, приводящее к протеканию аварийного тока, так как ЭДС электродвигателя и напряжение питания совпадают по направлению. Угол у на рис. 10, в, г соответствует промежутку времени, в течение которого ток протекает по двум тиристорам: вступающему в работу и выходящему из нее. Этот угол называется углом коммутации.
В крановых электроприводах постоянного тока тиристорные преобразователи осуществляют питание якорных цепей двигателей и их обмоток возбуждения. Для крановых электроприводов до 1985 г. выпускались преобразователи типа АТРК, которые в настоящее время заменены на преобразователи типа ТПЕ. Принципы построения преобразователей обоих типов одинаковы, однако в ТПЕ использованы более совершенные конструктивные решения и они имеют по сравнению с АТРК меньшие массу и габариты. Технические характеристики преобразователей ТПЕ и АТРК приведены в табл. 1. Далее подробно рассматриваются преобразователи ТПЕ.
Таблица 1. Технические данные тиристорных преобразователей типа ТПЕ и АТРК
| Тип преобразователя | Номинальное выпрямленное напряжение, В | Номинальный выпрямленный ток, А | Максимальный выпрямленный ток, А | Габариты преобразователя, мм | Масса пре- | |||
ТПЕ-100/100-460 |
| 100 | 200 | 800x750x1000 | 280 | |||
ТПЕ-200/200-460 |
| 200 | 400 | |||||
ТПЕ-400/400-460 | 460 | 400 | 800 | 800x775x1637 | 580 | |||
ТПЕ-630/630-460 |
| 630 | 1260 | 1000x775x1650 | 660 | |||
Тип преобразователя | Номинальное выпрямленное напряжение, В | Номинальный выпрямленный ток, А | Максимальный выпрямленный ток, А | Габариты преобразователя, | Масса пре- | |||
АТРК-100/230 | 230 | 100 | 200 | 800x750x1700 | 480 | |||
АТРК-100/460 | 460 | 510 | ||||||
АТРК-160/230 | 230 | 160 | 220 | 480 | ||||
АТРК-160/460 | 460 | 510 | ||||||
АТРК-250/230 | 230 | 250 | 500 | 520 | ||||
АТРК-250/460 | 460 | 600 | ||||||
АТРК-500/230 | 230 | 500 | 1000 | 2000x750x1700 | 1000 | |||
АТРК-500/500 | 460 | |||||||
СИЛОВЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЯ
Преобразователь включает в себя два управляемых выпрямителя: для питания якорной цепи двигателя и его обмотки возбуждения.
Выпрямитель якорных цепей выполнен по трехфазной мостовой реверсивной схеме со встречно-параллельным соединением двух выпрямительных мостов UZ1 и UZ2 (рис. 11, а), выпрямитель цепей возбуждения UZ3 построен по однофазной мостовой схеме (рис. 11,6). Охлаждение силовых тиристоров — естественное воздушное.
Мосты UZ1 и UZ2 подключены к сети быстродействующим автоматическим выключателем QF1 через токоограничивающий реактор L.
Номинальное и максимальное выпрямленное напряжение преобразователей составляет соответственно 230 и 440 В, номинальный выпрямленный ток возбуждения 15 А.
Рис. 11. Силовые схемы выпрямителя якорной цепи (а) и цепи возбуждения (б)
Выключатель QF1 защищает силовой выпрямитель от токов короткого замыкания на стороне переменного тока. На выходе выпрямителя защита осуществляется автоматическим выключателем QF2. В зависимости от номинального тока мосты имеют одну, две или три параллельные ветви соответственно на токи 200, 400 и 630 А. Управление тиристорными мостами раздельное от одной системы фазоимпуль- сного управления, при котором сигналы управления подаются только на работающую группу тиристоров. Это позволяет исключить протекание силовых токов в замкнутом контуре, образуемом тиристорными мостами, и в цепях, связывающих мосты, отсутствуют силовые дроссели.
Выпрямитель возбуждения UZ3 подключен к сети через токоограничивающие резисторы R и автоматический выключатель QF3, защищающий от токов короткого замыкания. В силовой цепи установлен также предохранитель F1, осуществляющий защиту от токов перегрузки.
ФУНКЦИОНАЛЬНАЯ СХЕМА ПРЕОБРАЗОВАТЕЛЯ
Функциональная схема представлена на рис. 12 и состоит из системы управления силового выпрямителя А1 и системы управления выпрямителя возбуждения А2. Система А1 включает следующие основные функциональные узлы: VI — задатчик интенсивности; U2 — регулятор скорости, контур регулирования тока, включающий регулятор тока U3 и датчик тока UA1; U4 — датчик напряжения; U5 — логическое переключающее устройство; UA2 — датчик нуля тока; AV-M -система фазоимпульсного управления.

Рис. 12. Функциональная схема преобразователя постоянного тока
Система А2 включает узел управления U6, задатчик интенсивности U7, регулятор тока возбуждения U8 с датчиком тока UA3 и систему фазоимпульсного управления AV. Задатчик интенсивности обеспечивает разгон привода (изменение напряжения на выходе силового выпрямителя) в функции времени при скачкообразном сигнале от командоаппарата SM. Система фазоимпульсного управления AV-M предназначена для генерирования управляющих импульсов и осуществления их фазового сдвига в зависимости от значения входного управляющего сигнала. Управление тиристорными мостами, как уже было сказано, раздельное, а их переключение производится логическим переключающим устройством 1/5. Управляющий сигнал на вход AV-M формируется системой автоматического регулирования, обеспечивающей стабильность и необходимое качество регулирования во всех возможных режимах. Система автоматического регулирования включает в себя контур скорости с регулятором скорости U2 и обратной связью по напряжению от датчика напряжения U4 и контур тока с регулятором тока U3 и обратной связью по току от датчика тока UA1 с ходом от трансформатора тока ТА1. Система управления возбуждением обеспечивает увеличение частоты вращения двигателя при малых нагрузках путем ослабления поля двигателя по сигналу от датчика силового тока UA1 и стабилизацию заданного узлом управления U6 тока возбуждения при колебаниях напряжения сети и изменении сопротивления обмотки возбуждения. Система автоматического регулирования преобразователя возбуждения одноконтурная по току возбуждения с поступлением сигнала обратной связи по току от трансформатора ТА2. Для осуществления питания и синхронизации системы управления выпрямителей якорной цепи и возбуждения служит блок U9, включающий пять источников выпрямленного напряжения: 12 В — для питания интегральных микросхем; 157 В — стабилизированный источник цепей управления; 150 В — для заряда емкостей в схеме фазового сдвига и источник 7,5 В для цепей смещения логического переключающего устройства. Поскольку работа основных узлов систем управления выпрямителями якорной цепи и цепи возбуждения во многом идентична, ниже рассматривается работа отдельных узлов системы управления силовым выпрямителем. При этом схемы приводятся в упрощенном виде, без учета корректирующих и помехозащитных устройств, подробно рассматриваемых в специальной литературе, а порядковые номера и обозначения элементов не соответствуют их обозначениям в схеме преобразователей.
ЗАДАТЧИК ИНТЕНСИВНОСТИ (ЗИ)
Схема задатчика интенсивности приведена на рис. 13. Она содержит два дифференциальных усилителя А1 и А2, первый из которых является усилителем входного сигнала

Рис. 13. Схема задатчика интенсивности
(резистор R3 в цепи отрицательной обратной связи), а второй — интегратором (конденсатор С1). Сигнал задания подается на инвертирующий вход усилителя А1 через резистор R2, а на неинвертирующий поступает сигнал отрицательной обратной связи через резистор R4. Время изменения выходного напряжения определяется значением входного сигнала и регулируется потенциометрами R7 и R8. Резистор R1 обеспечивает связь между входом ЗИ и узлом управления, резисторы R5 и R6 связывают усилители А1 и А2, а резистор R9 устанавливает необходимый уровень напряжения на инвертируемом входе интегратора А2. Полное время развертки входного сигнала (время интегрирования) может быть установлено от 1 до 14 с.
ОСНОВНЫЕ ПРИНЦИПЫ РАБОТЫ ТИРИСТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Производим и продаем электроприводы ЭТУ, ЭПУ для двигателей постоянного тока, тел./email +38 050 4571330 / [email protected] 

Привод ЭПУ 25А с дросселем — 5500грн
Цены на преобразователи частоты 220/380В 1 фаза в 3 фазы (12.11.14г.):
Модель Мощность Цена
CFM110 0.25кВт 1500грн
CFM110 0.37кВт 1600грн
CFM210 1,0 кВт 2200грн
CFM210 1,5 кВт 2400грн
CFM210 2,2 кВт 2900грн
CFM210 3,3 кВт 3400грн
Гарантия — 2 года.
Контакты для заказов:
+38 050 4571330
[email protected]
Управление двигателями постоянного тока в электроприводах подач станков, с ЧПУ осуществляется в настоящее время с помощью тиристорных преобразователей (в широтно-импульсных преобразователях небольшой мощности в качестве силовых элементов могут применяться мощные транзисторы). Тиристор — ный преобразователь ТП, работающий на нагрузку в виде ДПТ, состоит из двух основных частей (рис. 2.1): силовой схемы и системы импульсно-фазового управления. Основное назначение силовой схемы — преобразование 3-фазного переменного напряжения сетн в постоянное напряжение £/тп для питания якорной цепи ДПТ, величина которого зависит от величины управляющего напряжения UУрр, подаваемого на вход ТП. В отличие от обычного управляемого выпрямителя силовая схема ТП в определенных режимах работы ДПТ осуществляет обратное преобразование напряжения постоянного тока в напряжение переменного тока (так называемый инверторный режим). Для регулирования величины выпрямленного напряжения изменяют длительность проводящего состояния тнрн- стора путем изменения фазового угла открывания тиристора а относительно начала положительной полуволны анодного напряжения. Эту задачу решает система импульсно-фазового управления СИФУд осуществляя преобразование непрерывного входного сигнала управления £/уПр в фазовый сдвиг отпирающего импульса а^что иллюстрируется рис. 2.2. Здесь для фазы А показано пилообразное опорное напряжение с линейно-нарастающим рабочим участком а—d. Значение начального угла управления аНач. отсчитываемогб от момента естественного отпирания тиристора, устанавливается напряжением смещения UCK. При увеличении действующего встречно смещению входного управляющего напряжения £/упр угол управления а уменьшается. Зависимость угла а от t/ynp может быть определена из следующих соображений. Пусть измене-
1С
Нию сOt= — (о — круговая частота напряжения питания) соответствует изменение напряжения на выходе генератора пилообразного напряжения, равное Uru тогда на основании соотношения, которое непосредственно следует из рассмотрения рис. 2.2,
ABC
ГТп
Силобая
Рис. 2.1. Блок-схема тиристорного преобразователя |

I Система Uynp импдльсно- |
Фазового управления |
Анач — а я/2
Иупр ип
Можно — записать выражение, связывающее угол управления с сигналом на входе
СИФУ:
Я ^упр
-*нач — 2 • ц
Практически в СИФУ в качестве опорного напряжения может использоваться не только пилообразное напряжение, но и синусоидальное, косинусоидальное, сформированное из отрезков синусоид напряжений нескольких фаз питающей сети и т. д. Опорное напряжение должно быть синхронизировано с соответствующей фазой питающей сети. 1
Структурная схема СИФУ для управления тиристором фазы А1 показана на рис. 2.3. Она состоит из фазосдвигающего устройства ФСУ и усилителя-формирователя импульсов УФИ. ФСУ состоит из блока опорного напряжения БОН, узла суммирования опорного напряжения Uon с входным управляющим напряжением f/yirp и нуль-органа НО. Формирование опорного напряжения в БОН осуществляется из напряжения а, жестко привязанного по фазе к напряжению питающей сети А1. Напряжение с выхода узла суммирования подается на вход НО, Который формирует импульс в момент сравнения напряжений U0N И UУпр или в момент прохождения через нуль суммарного напряжения. Далее этот импульс после усиления и формирования подается на управляющий электрод тиристора дЛя его открывания. Управляющие импульсы должны иметь достаточную мощность и высокую крутизну, необходимую для четкого открывания тиристоров. Ток в импульсе должен превышать ток управления спрямления тиристора, а длительность импульса должна превышать время нарастания силового тока тиристора до величины тока «удержания.
|

Наибольшее применение нашел так называемый вертикальный принцип построения СИФУ, при котором в результате суммирования Uon и £/уПр получается напряжение UВх. но, повторяющее по форме напряжение UaП, но Смещенное по вертикали в ту или иную сторону в зависимости от величины, и знака напряжения £/уцр (рис. 2.4).
Ниже рассматриваются особенности и принципы работы силовых схем ти — ристорных преобразователей (для краткости далее просто тиристорных преобразователей). Тиристорные преобразователи выполняются однофазными и многофазными. Прн небольшой мощности нагрузки и невысоких требованиях к каче-
Рис. 2.3. Структурная схема СИФУ |

Рис. 2.4. Принцип вертикального управления
Ству управления применяются более простые однофазные 777. В приводах подач станков в основном применяются многофазные ТП, что связано с существенным уменьшением пульсаций выпрямленного напряжения, более высоким быстродействием и «т. д. Все многофазные силовые схемы ТП делятся на нулевые и мостовые.
В нулевых схемах (рис. 2.5, а) нагрузка, например якорная цепь электродвигателя, подключаетс
Привод электродвигателя постоянного тока
Общее понятие
Приводы постоянного тока служат для управления двигателями постоянного тока. Правда не везде, а лишь там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в достаточно широких пределах.
Где же конкретно могут использоваться приводы постоянного тока? Для того, чтобы ответить на данный вопрос, нам надо вначале сказать несколько слов о принципе работы двигателя постоянного тока.
Вообще надо заметить, что электродвигатели — очень распространенный объект управления в различных устройствах и технических системах. Причем настолько, что без них вся наша современная жизнь очевидно вовсе не была бы такой уж и современной. Точнее мы бы так и не ушли далее технологий начала 19 века. И не имели бы не только компьютеров, с их гаджетами, но и вообще не знали бы, например, даже столь привычного нам электрического освещения, поскольку сами электрогенераторы – это, по сути, те же самые электродвигатели, но только преобразующие различные виды неэлектрической энергии (механическая, химическая или тепловая) в электрическую энергию.
Сами электродвигатели при этом, как известно, делятся на электродвигатели постоянного тока и электродвигатели переменного тока. Причем сегодня в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, именно последние приобретают все большую популярность в промышленности.
Однако, нельзя не сказать, что и двигатели постоянного тока рано еще списывать со счетов. Они имеют свои весьма важные и существенные преимущества. Дело в том, что один из «глобальных» минусов двигателя постоянного тока – это коллектор, его низкая механическая прочность, а также слабая механическая прочность щеток.
Но зато у двигателя постоянного тока можно менять скорости в достаточно широком диапазоне при относительном постоянстве момента на валу. При этом количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку. А это значит, что в диапазоне скоростей от нуля до номинального значения электродвигатель может развивать полный крутящий момент. Именно поэтому двигатель постоянного тока широко используют в тех случаях, когда необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом. К таковым областям относятся электроприводы лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и топу подобных механизмов.
Принцип действия двигателя постоянного тока
Вообще надо заметить, что самой первой из всех изобретенных в XIX веке вращающихся электромашин был именно электродвигатель постоянного тока. Сам принцип действия его известен с середины прошлого столетия и основан на том, что крутящий момент здесь создаётся путём взаимодействия между двумя магнитными полями — полем обмотки возбуждения и полем, создающимся обмотками во вращающемся якоре.
Впрочем, в некоторых моделях двигателей постоянного тока нет обмотки возбуждения, вместо нее установлены постоянные магниты, сохраняющее стационарное магнитное поле при любых рабочих условиях.
Принцип работы двигателя постоянного тока заключается в том, что ток, проходя через якорь, создаёт магнитное поле, которое пытается выровняться со стационарным полем. Происходит вращение двигателя/
Рис. 1. Схема двигателя постоянного тока
При этом коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания в этом случае происходит через угольные щетки. Поскольку здесь постоянно имеет место механическое трение, то эти щетки изнашиваются через определенное время (как и сам коллектор) и соответственно требуют своей периодической замены.
Впрочем, следует заметить, что большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху.
В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Крутящий момент. Он прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря. Так же момент прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость. Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов). Это значит, что скорость прямо пропорциональна напряжению якоря, а также обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Управление двигателем постоянного тока
Последнее же означает, что, меняя тока обмотки, можно изменять соотношение между скоростью и моментом. Однако этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока также необходимо управлять напряжением и током якоря. Для этой цели можно было бы использовать переменные резисторы, но этот метод не используется в настоящее время, так как приводит к потере мощности. Лучшим решением здесь будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.
Рис.2. Схема управления скоростью и моментом ДПТ
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры (управляемая схема Ларионова). Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел.
Рис.3. Схема управляемого выпрямителя
Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Отсюда следует, что привод постоянного тока просто регулирующий подводимую мощность к двигателю был бы трудно регулируемым и не применим в большинстве задач. Для управления двигателем необходимо управлять скоростью. Поэтому на двигателях постоянного тока устанавливают тахогенераторы, механически соединённые с валом двигателя.
Тахогенератор представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно с выходом 0-10В постоянного тока, реже 0-220В переменного тока. По его показаниям регулируемый привод постоянного тока регулирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея датчик обратной связи для регулирования скорости, привод постоянного тока точно регулирует скорость вращения двигателем.
Рис. 4. Схема управления двигателем постоянного тока
Менять ли привод постоянного тока?
Следует заметить, что в силу длительного периода широкого применения двигателей постоянного тока, на протяжении довольно долгого времени для регулировки скорости вала двигателя использовались приводы постоянного тока. Тем самым, данные приводы имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Но вот в чем проблема – дело в том, что раньше приводы постоянного тока выпускались с управлением на аналоговых микросхемах. А это вело к длительной настройке оборудования, необходимости постоянного обслуживания привода и частой его перенастройки. В результате против двигателей постоянного тока и соответственно приводов постоянного тока сложилось предубеждение о ненужности и даже вредности установки таких систем. Повсеместно обозначилась тенденция к замене «постоянников» на «переменники». И где-то это и правда оказалось оправдано, но…
Увы, но часто «дьявол кроется в деталях»!
Следует заметить, что сейчас приводы постоянного тока выпускаются с фазными схемами управления, основанными на современных микропроцессорах. А это значит, что они стали значительно более надежны и, ГЛАВНОЕ, не нуждаются в необходимости постоянного обслуживания привода и частой перенастройки приводов. А поскольку вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными по своему функционалу (а в конечном счете и по деньгам), то возможно при модернизации оборудования следует обратить внимание на приводы постоянного тока.
Более того, сегодня необходимо учитывать, что очень часто, при модернизации систем управления, простая замена устаревших приводов постоянного тока новыми современными приводами постоянного тока, является экономически более выгодной!
Подумайте! Возможно это Ваш случай? Причем в данном случае имеет смысл обратить именно на лидеров по производству приводов постоянного тока, одним из которых является фирма Siemens, выпускающая приводы постоянного тока серии SINAMICS DCM — современный мощный привод постоянного тока со многими дополнительными модулями расширения, интеграции в промышленные сети и встроенными функциями для решения типовых технологических задач (намотка-размотка и т. д.).
Обращайтесь к нам, и мы поможем Вам приобрести немецкое качество по разумным ценам!
Настройка, монтаж и обслуживание от высококлассных специалистов.
Лекция 8. Электропривод постоянного тока по схеме «тиристорный преобразователь – двигатель» (ТП-Д)
Электропривод постоянного тока по схеме «тиристорный преобразователь – двигатель» (ТП-Д)
Цель: изучение характеристик и схемных решений приводов с ДПТ и полупроводниковыми преобразователями.
Приводы по схеме ТП-Д (рисунок 8.1) являются наиболее распространенными регулируемыми приводами постоянного тока.
Уравнения электромеханической (2.4) и механической (2.5) характеристик при питании якоря ДПТ от тиристорного преобразователя (ТП) приобретают вид
; (8.1)
, (8.2)
где RП– эквивалентное сопротивление тиристорного преобразователя.
В результате влияния сопротивления преобразователя, характеристики ЭД в разомкнутой схеме управления становятся менее жесткими, чем естественная характеристика (рисунок 8.2). Однако в современных ТП применяются различного рода обратные связи, стабилизирующие скорость при изменении нагрузки.
Принцип действия ТП основан на том, что в положительный полупериод питающего напряжения тиристор, подобно ключу, открывается и подает напряжение к двигателю только часть этого полупериода (рисунок 8.3). При этом среднее выпрямленное напряжение на нагрузке UСР определяется углом задержки отпирания вентиля α, называемым углом управления.
Пример схемы ТП (трехфазная нулевая реверсивная) приведен на рисунке 8.4. Для m – фазного управляемого выпрямителя при непрерывном токе
(8.3)
Таким образом, в (8.1), (8.2) , где Ud0 максимальное выпрямленное напряжение ТП определяется схемой выпрямления и величиной подводимого к схеме напряжения (вторичного фазного напряжения питающего трансформатора):
Ud0 = kСХU2Ф. (8.4)
Коэффициент схемы равен 2.34 для мостовой схемы и 1.17 – для нулевой схемы выпрямления.
Эквивалентное внутреннее сопротивление преобразователя
RП=RТ+п×RдТ+Rк. (8.5)
Для мостовых схем RТ вдвое больше (сопротивление двух фазных обмоток трансформатора). Значение коммутационного сопротивления
, (8.6)
где m — число фаз (для мостовых схем m=6).
Величина п указывает число последовательно соединенных тиристоров (для мостовых схем удвоенное).
При анализе статических свойств ТП его структурную схему удобно представить в виде двух последовательно включенных звеньев (рисунок 9): системы импульсно-фазового управления (СИФУ) и собственно тиристорного преобразователя (силового блока). Входным сигналом СИФУ является напряжение управления Uу, которое преобразуется в угол регулирования тиристоров α и определяет среднее значение выпрямленного напряжения Udна выходе силового блока.
Коэффициент передачи СИФУ представляет собой отношение приращения угла регулирования к приращению напряжения управления.
. (8.7)
Коэффициент передачи собственно тиристорного преобразователя есть отношение приращения среднего значения выпрямленного напряжения к приращению угла регулирования тиристоров
. (8.8)
Общий коэффициент усиления зависимого инвертора представляет собой отношение приращения среднего значения выпрямленного напряжения к приращению напряжения управления
(8.9)
и в соответствии со структурной схемой
. (8.10)
В преобразователях используются СИФУ с линейными или так называемыми арккосинусоидальными характеристиками (рисунок 8.6). Во втором случае получаем линейную в пределах рабочего диапазона зависимость Ed = f(Uy).
Тиристорный электропривод — это… Что такое Тиристорный электропривод?
- Тиристорный электропривод
В Т. э. переменного тока в качестве ИД чаще всего применяют асинхронные и синхронные трёхфазные электродвигатели, режим работы которых можно регулировать изменением частоты и амплитуды напряжения, подводимого к статору, а в случае синхронного двигателя — также изменением тока в обмотке возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, регулирующим ПУ обычно служит тиристорный Преобразователь частоты, выполненный либо с промежуточным звеном постоянного или переменного тока, либо по схеме с непосредственной связью. При питании таких Т. э. от источника постоянного тока в качестве ПУ используют автономный Инвертор. Реверсирование ИД (см. Реверсивный электропривод) в Т. э. переменного тока осуществляют, изменяя последовательность чередования фаз напряжения, подводимого к статору.
В Т. э. постоянного тока применяют двигатели постоянного тока с последовательным, параллельным, смешанным или независимым возбуждением, регулирование режимов работы которых можно производить по цепи обмотки якоря или обмотки возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, ПУ служит тиристорный Выпрямитель тока.Если питание таких Т. э. осуществляется от источника постоянного тока, то ПУ выполняют в виде импульсного регулятора постоянного тока или системы «инвертор — выпрямитель» с промежуточным звеном переменного тока повышенной частоты. В Т. э. постоянного тока реверсирование ИД производят изменением направления тока в обмотке якоря или обмотке возбуждения двигателя (при этом применяют второе такое же ПУ, включаемое встречно-параллельно с первым по отношению к цепи ИД).
Для гальванической развязки цепей питания и нагрузки, а также при необходимости согласовать величины напряжения источника питания и ИД в Т. э. используют трансформатор, включая его на входе ПУ (если Т. э. питается от источника переменного тока) или в его промежуточном звене (при питании Т. э. постоянным током). Управление передаваемым через ПУ потоком энергии осуществляют посредством ручной или автоматической системы управления и регулирования (СУР), включающей блоки питания, регулирования частоты и напряжения, формирования управляющих импульсов для тиристоров силовых цепей ПУ, а также блоки защиты от токов короткого замыкания, перегрузок и перенапряжении. Современные СУР выполняют на типовых логических блоках (см. Логический элемент) и интегральных схемах (См. Интегральная схема), имеющих малые габариты, высокие быстродействие и надёжность. Для отвода тепла от тиристоров и ИД используют естественное или принудительное воздушное либо жидкостное охлаждение.Т. э. находят применение в различных отраслях промышленности и на транспорте. Мощность Т. э. составляет (в зависимости от их назначения) от нескольких квт до 10 Мвт и выше.
Лит.: Ривкин Г. А., Преобразовательные устройства, М., 1970; Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971.
Ю. М. Иньков.
Большая советская энциклопедия. — М.: Советская энциклопедия.
1969—1978.
- Тиристор
- Тиритака
Смотреть что такое «Тиристорный электропривод» в других словарях:
тиристорный электропривод — Электропривод, содержащий тиристорный преобразователь электроэнергии. [ГОСТ Р 50369 92] Тематики электропривод EN thyristor drive DE Thyristorantrieb … Справочник технического переводчика
тиристорный электропривод — 60 тиристорный электропривод: Электропривод, содержащий тиристорный преобразователь электроэнергии Источник: ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал документа … Словарь-справочник терминов нормативно-технической документации
ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ — ДВИГАТЕЛЬ — система ТП Д, электропривод, в к ром двигатель пост. тока получает питание от тиристорного преобразователя перем. тока в постоянный. Позволяет регулировать угловую скорость двигателя, вращающий момент и др. параметры. Применяется в осн. совместно … Большой энциклопедический политехнический словарь
тиристорный — см. тиристор; ая, ое. Тири/сторный электропривод. Т ое устройство. Т ые преобразователи … Словарь многих выражений
ГОСТ Р 50369-92: Электроприводы. Термины и определения — Терминология ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал документа: 3 (электро) двигатель (электропривода): Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.… … Словарь-справочник терминов нормативно-технической документации
Тиристор — (от греч. thýra дверь, вход и англ. resistor Резистор полупроводниковый прибор, выполненный на основе монокристалла полупроводника (См. Полупроводники) с четырёхслойной структурой р n p n типа, обладающий свойствами вентиля электрического … Большая советская энциклопедия
Протон-Электротекс — Тип ЗАО Год основания 1996 Расположение Орел, Россия Отрасль Силовая Электроника … Википедия
КТЭ — Конфедерация трудящихся Эквадора объединение профсоюзов организация, Эквадор КТЭ компьютерно техническая экспертиза комп., техн. Источник: http://www.crime research.ru/library/Rossinskay.html КТЭ компьютер технической эксплуатации … Словарь сокращений и аббревиатур
Электрический привод — (сокращённо электропривод) это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод … … Википедия
Электротранспорт — У этого термина существуют и другие значения, см. Электротранспорт (значения). Электротранспорт вид транспорта, использующий в качестве источника энергии электричество, а в качестве привода тяговый электродвигатель. Его основными… … Википедия
Книги
- Автоматизированный электропривод, Геннадий Симаков. В учебном пособии изложены вопросы расчета систем автоматизированного электропривода. Рассмотрены тиристорный и транзисторный электропривод постоянного тока, атакже транзисторный асинхронный… Подробнее Купить за 165 руб электронная книга
Однофазный привод постоянного тока » Журнал практической электроники Датагор (Datagor Practical Electronics Magazine)
В основе разработки электропривода лежит принцип работы следящего привода с одноконтурной системой регулирования. Привод предназначен для поддержания постоянных оборотов электродвигателя, в независимости от нагрузки на валу двигателя. Данная схема работает с регулированием по току.
Заменив трансформатор тока, на датчик напряжения, привод поддерживает постоянное напряжение на якоре. При наличии тахогенератора на валу двигателя, не изменяя схему, привод легко может быть доработан до двухконтурной системы с регулированием по скорости и по току.
Также для регулирования привода по току вместо трансформатора тока можно применить шунт, на соответствующий ток, включенный непосредственно в цепь якоря двигателя.
Содержание / Contents
Привод собран на печатной плате размерами 100?95 мм. и состоит из следующих узлов:
· СИФУ (Система Импульсно — Фазового Управления)
· Регулятор
· ЗащитаТак как работа СИФУ подробно описана в ранее опубликованной публикации «Регулятор скорости» (там же даны и осциллограммы) — этот пункт я пропускаю и перехожу к описанию работы «Регуляторы».Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регулирования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.2. При увеличении напряжения задания на выходе ОУ DA1.2 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA2.4 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.2 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода через двигатель протекает ток и, переменное напряжение, снимаемое с трансформатора тока, поступает на вход прецизионного детектора DA2.1, DA2.2 собранного по двухполупериодной схеме (эпюры напряжений см. осциллограммы). Пульсирующее напряжение, снимаемое с выхода точного детектора DA2.1, DA2.2, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.3. Усилитель служит для подгонки напряжения обратной связи поступающего с трансформатора тока. Напряжение с выхода ОУ DA2.3. поступает как на вход регулятора DA1.2 так и на схему защиты DA1.4.
Резистором RP1 задаем обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 5 ОУ DA1.2. ? +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя растет ток двигателя и как следствие увеличение напряжения на выходе трансформатора тока и увеличение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение превысит напряжение на выводе 5 ОУ DA1.2. привод входит в зону стабилизации тока. Увеличение напряжения на инверсном входе ОУ DA1.2 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA2.4, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя. Принцип работы объясняется осциллограммой.
Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на » регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. При отжатой кнопке «Пуск» напряжение +12v через н. з. контакты кнопки SB1.1, резистор R12 и диод VD4, поступает на инверсный вход DA2.4. Так как это напряжение ? +11v и превышает напряжение «пилы» равное +9v, выдача управляющих импульсов на тиристоры не происходит.
при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке «земля», R13, — С5 начинает плавно заряжаться. Напряжение на отрицательной обкладке конденсатора С5 плавно стремиться к «, в тоже время напряжение на инверсном входе DA2.4, плавно возрастает до уровня определенного напряжением задания. Время разгона определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.Защита по току предназначена для защиты двигателя от аварии, в случае перегрузки двигателя. Схема собрана на ОУ DА1.4 включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP4. Резистором RP4 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.3 поступает на прямой вход компаратора защиты DA1.4.
При превышении тока двигателя выше номинального, напряжение на прямом входе компаратора превышает порог уставки защиты определяемой RP4 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «защелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (? +11v) через диод VD14 поступает на инверсный вход 13 DA2.4 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA1.4 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его.
В случае обрыва, или исчезновения питания в цепи обмотки возбуждения двигатель пойдет «в разнос». Для предотвращения этого предусмотрена защита обрыва по полю собранную на токовом реле К1. Когда подается напряжение на привод срабатывает реле К1 и нормально закрытыми контактами разблокирует кнопку «Пуск». Если в процессе работы происходит обрыв питания в цепи обмотки возбуждения реле К1 отпускается и шунтирует кнопку «Пуск». Напряжение +12v поступает на инверсный вход ОУ DA2.4 СИФУ, а так как это напряжение превышает напряжение «пилы» равное 9v, DA2.4 прекращает выдачу управляющих импульсов на тиристоры.Увы, к сожалению, я не могу дать точные номиналы конденсаторов и резисторов «Регулятора», для оптимизации работы привода, а также данные токового трансформатора и реле К1 на схеме «Регулятора», так как это зависит от конкретного типа двигателя. Даже профессиональные привода, например «Kemtor», работает только с конкретным типом двигателя или 5.5 квт, или 11 квт. И даже здесь для оптимизации работы привода приходиться подбирать номиналы резисторов и конденсаторов при переходе с одной мощности на другую.
Вместо двигателя подключаем лампочку на 220v. Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Проверяем и настраиваем СИФУ по методике описанной ранее в статье «Регулятор оборотов». Подбираем резисторы R19, R20, R21, R24 так чтобы к контрольной точке КТ7 получить (необязательно точно такие же) напряжения показанные на осциллограмме КТ7. Вращая регулятор RP1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RP1. Схема калибровки трансформатора тока дана в приложении. Подбором резистора получить на выходе трансформатора переменное напряжение ? 2 ? 2.5v.

Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи Х3. На время настройки «Регулятора» желательно выпаять диод VD4, чтобы исключить ложное срабатывание защиты. Для улучшения динамических характеристик привода желательно параллельно резистору R32 установить конденсатор С11 (на печатной плате его нет). После предварительной настройки отключаем лампочку, подключаем электродвигатель и производим оптимизацию привода согласно эпюрам напряжений на осциллограммах. Напряжения даны при идеальной настройке привода. Вероятно, желающим повторить данную конструкцию и не знакомым с теорией электропривода трудно будет добиться такой оптимизации привода — не огорчайтесь. При исправных деталях и правильном монтаже привод должен работать любом случае.
ОУ — LM324N — счетверенный операционный усилитель с однополярным питанием.
VD1 — мост КЦ407
Реле — РЭС-47 или РЭК-23 на 12 ? 18 Вольт.
Подстроечные резисторы — СП5—3ВБ или аналогичные импортные.
Импульсный трансформатор — МИТ-4В
Разъем — МНР22—2
Внимание! В схеме не применять керамические конденсаторы
Типы тиристоров и силовых диодов выбираются в зависимости от мощности применяемого электродвигателя. Трансформатор тока и реле К1 самодельные.
Многофункциональность данного устройства обеспечивает ему широкий спектр применения. Оно может использоваться не только как электропривод, но и как стабилизатор в устройствах, где требуется поддержание стабильности технологических процессов. Чертежи печатной платы, схема и осциллограммы даны в приложении.
Если же у Вас возникнут вопросы по наладке привода — пишите. Всегда рад буду помочь.Схемы и чертеж печатной платы выполнены в программе P-CAD 2002, осциллограммы — в AutoCAD 2006.
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Схемы в Splan: Схемы приводов от Сергея (ddssu) в формате Splan (дополнение к статьям)
Камрад, рассмотри датагорские рекомендации
![]()
Имя героя неизвестно (ddssu)
Местоположение в тайне.
О себе автор ничего не сообщил.
СОВРЕМЕННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ
Тиристорные электроприводы постоянного тока
Производим и продаем электроприводы ЭТУ, ЭПУ для двигателей постоянного тока, тел./email +38 050 4571330 / [email protected]
Привод ЭПУ 25А с дросселем — 5500грн
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, широко используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Тиристорный преобразователь, показанный на рис. 1.6, обеспечивает питание якорной цепи двигателя регулируемым напряжением. На рис. 1.7 представлены три основных способа преобразования неизменного по амплитуде постоянного или переменного напряжения в регулируемое напряжение постоянного тока ■— фазовое, интегро-импульсное и широтно-импульсное управление. Во всех случаях тиристоры обеспечивают подключение двигателя к источнику энергии и отключение от него. Благодаря высокой частоте коммутации двигатель воспринимает среднее, а не мгновенное значение выходного напряжения преобразователя.
Как при фазовом, так и при интегро-им-пульсном способе уп-
Вход Выход
Рис. 1.7. Принципы преобразования энергии источника с неизменным напряжением в энергию постоянного тока с регулируемым напряжением |

Правления переменное напряжение преобразуется в постоянное. В первом случае двигатель через один из тиристоров подключен к сети в течение определенной доли полупериода питающего напряжения и отключен остальную часть полупериода. При интегро — имщульсном управлении тиристор связывает источник питания с двигателем на протяжении нескольких полупериодов напряжения, а затем осуществляет паузу в питании. В схемах импульсного управления коммутация тиристора обеспечивает питание двигателя импульсным напряжением. Среднее значение этого напряжения регулируется соотношением периодов открытого (4ткр) и закрытого (4ак) со-стояния тиристора. Если питание осуществляется от сети переменного тока, перед импульсным преобразователем включается выпрямитель.
В схемах с фазовым и интегро-импульсным способами управления выключение тиристора происходит обратной полуволной питающего напряжения, поэтому отпадает необходимость в цепях коммутации. Схемы оказываются простыми и недорогими. Наиболее широко применяется фазовое управление. Этот способ обеспечивает плавное регулирование в широком диапазоне, однако при глубоком регулировании скорости двигателя существенно снижается коэффициент мощности преобразователя. Интегро — импульсный принцип управления целесообразен лишь при питающем напряжении высокой частоты, в противном случае велики пульсации скорости двигателя относительно ее среднего значения. Подобные системы не нашли широкого применения в электроприводах с регулированием скорости. При наличии питающей сети постоянного тока используются импульсные схемы. В этом случае для выключения тиристоров необходимы коммутирующие цепи. Уменьшение пульсаций потребляемого двигателем тока обеспечивается достаточно высокой частотой коммутации, что требует применения высокочастотных тиристоров. Поэтому импульсный способ управления считается относительно сложным, но, несмотря на это, он нашел широкое применение. Комбинация выпрямителя и импульсного регулятора еще дороже, хотя такое решение выгодно отличается от других систем с питанием от сети переменного тока более высоким коэффициентом мощности, достигаемым благодаря наличию неуправляемого вентильного моста на входе.
/В большинстве регулируемых электроприводов весьма существенную роль играют тормозные режимы, широкое распространение получили фрикционные тормоза. Однако в механизмах с частыми торможениями (повторно-кратковременный режим работы) необходимость частого обслуживания и замены тормозных колодок делает такой способ торможения неэкономичным. В настоящее время в большинстве тиристорных приводов применяется электрическое динамическое или рекуперативное торможение. При электрическом торможении кинетическая энергия связанных с двигателем частей привода преобразуется в электрическую,. Последняя в схемах динамического торможения рассеивается в виде теплоты в тормозных сопротивлениях либо возвращается в сеть при рекуперативном торможении. В электрическом транспорте и электромобилях тиристорные преобразователи обеспечивают преобразование кинетической энергии поступательного. движения в электрическую.
Тиристорные приводы постоянного тока, как правило, комплектуются сложными аналоговыми или цифровыми системами управления. Современные микропроцессорные системы управления позволяют в полной мере использовать высокие регулировочные возможности тиристорного управления. В последнее время быстрое развитие тиристорных электроприводов постоянного тока происходит весьма интенсивно [4—>191.
Моторный привод — Википедия переиздана // WIKI 2

Моторный привод , или просто известный как привод , описывает оборудование, используемое для управления скоростью машин. Многие производственные процессы, такие как сборочные линии, должны работать с разной скоростью для разных продуктов. Когда условия процесса требуют регулировки потока от насоса или вентилятора, изменение скорости привода может сэкономить энергию по сравнению с другими методами управления потоком.
Если скорость может быть выбрана из нескольких различных предварительно установленных диапазонов, обычно говорят, что скорость привода регулируется.Если выходную скорость можно изменять бесступенчато в диапазоне, привод обычно обозначается как с регулируемой скоростью .
Приводы с регулируемой и регулируемой скоростью могут быть чисто механическими (называемые вариаторами , ), электромеханическими, гидравлическими или электронными.
Электродвигатели
Электродвигатели
переменного тока могут работать в режиме фиксированной скорости, определяемой количеством пар полюсов статора в двигателе и частотой источника переменного тока. Двигатели переменного тока могут быть созданы для работы с «переключением полюсов», повторным подключением обмотки статора для изменения числа полюсов так, чтобы получить две, а иногда и три скорости.Например, машина с 8 физическими парами полюсов может быть подключена для работы с 4 или 8 парами полюсов, что дает две скорости — при 60 Гц это будет 1800 об / мин и 900 об / мин. Если изменения скорости случаются редко, двигатель можно сначала подключить для одной скорости, а затем перенастроить для другой скорости по мере изменения условий процесса, или можно использовать магнитные контакторы для переключения между двумя скоростями, когда технологические потребности колеблются. Подключение более трех скоростей неэкономично.
Количество таких рабочих скоростей с фиксированной скоростью ограничено стоимостью по мере увеличения количества пар полюсов.Если требуется много разных скоростей или бесступенчатая регулировка скоростей, требуются другие методы.
Двигатели постоянного тока позволяют изменять скорость, регулируя ток возбуждения шунта. Другой способ изменения скорости двигателя постоянного тока — это изменение напряжения, подаваемого на якорь.
Привод с регулируемой скоростью может состоять из электродвигателя и контроллера, который используется для регулировки рабочей скорости двигателя. Комбинацию двигателя с постоянной скоростью и непрерывно регулируемого механического устройства изменения скорости также можно назвать приводом с регулируемой скоростью.Преобразователи частоты на базе силовой электроники быстро заменяют старые технологии.
Причины использования моторных приводов
Управление процессом и энергосбережение — две основные причины использования привода с регулируемой скоростью. Исторически приводы с регулируемой скоростью разрабатывались для управления технологическими процессами, но сохранение энергии стало не менее важной задачей.
Контроль разгона

Привод с регулируемой скоростью часто может обеспечить более плавную работу по сравнению с альтернативным режимом работы с фиксированной скоростью.Например, на канализационной станции сточные воды обычно проходят по канализационным трубам под действием силы тяжести в место с мокрым колодцем. Оттуда он перекачивается в процесс лечения. Когда используются насосы с фиксированной скоростью, насосы настраиваются на запуск, когда уровень жидкости в мокром колодце достигает некоторой верхней точки, и останавливаются, когда уровень снижается до нижней точки. Включение и выключение насосов приводит к частым сильным скачкам электрического тока для запуска двигателей, что приводит к электромагнитным и тепловым напряжениям в двигателях и оборудовании управления мощностью, насосы и трубопроводы подвергаются механическим и гидравлическим нагрузкам, а также к процессу очистки сточных вод. вынужден компенсировать скачки потока сточных вод в процессе.Когда используются приводы с регулируемой скоростью, насосы работают непрерывно со скоростью, которая увеличивается по мере увеличения уровня влажного колодца. Это соответствует расходу со средним притоком и обеспечивает более плавную работу процесса.
Экономия энергии за счет использования эффективных приводов с регулируемой скоростью
Вентиляторы и насосы потребляют большую часть энергии, используемой промышленными электродвигателями. Если вентиляторы и насосы обслуживают изменяющуюся технологическую нагрузку, простой способ изменить подаваемое количество жидкости — использовать заслонку или клапан на выходе вентилятора или насоса, который за счет увеличения перепада давления снижает поток в процессе.Однако это дополнительное падение давления представляет собой потерю энергии. Иногда экономически целесообразно установить какое-либо устройство, которое восстанавливает эту потерянную в противном случае энергию. С помощью привода с регулируемой скоростью на насосе или вентиляторе подачу можно регулировать в соответствии с потребностью без дополнительных потерь.
Например, когда вентилятор приводится в движение непосредственно двигателем с фиксированной скоростью, воздушный поток рассчитан на максимальную потребность системы, и поэтому обычно будет выше, чем необходимо. Воздушный поток можно регулировать с помощью заслонки, но более эффективно напрямую регулировать скорость двигателя вентилятора.Согласно законам сродства, для 50% воздушного потока двигатель с регулируемой скоростью потребляет около 20% входной мощности (в амперах). Двигатель с фиксированной скоростью по-прежнему потребляет около 85% входной мощности при половине расхода.
Типы приводов
Некоторые первичные двигатели (двигатели внутреннего сгорания, поршневые или турбинные паровые двигатели, водяные колеса и другие) имеют диапазон рабочих скоростей, который можно непрерывно изменять (регулируя расход топлива или аналогичные средства). Однако эффективность может быть низкой в крайних пределах диапазона скоростей, и могут быть системные причины, по которым скорость первичного двигателя не может поддерживаться на очень низких или очень высоких скоростях.
До изобретения электродвигателей механические переключатели скорости использовались для управления механической мощностью, обеспечиваемой водяными колесами и паровыми двигателями. Когда электродвигатели вошли в употребление, почти сразу же были разработаны средства управления их скоростью. Сегодня на рынке промышленных приводов конкурируют между собой различные типы механических приводов, гидроприводов и электроприводов.
Механические приводы
Существует два типа механических приводов: приводы с переменным шагом и тяговые приводы.
Приводы с переменным шагом — это шкивные и ременные передачи, в которых можно регулировать средний диаметр одного или обоих шкивов.
Тяговые приводы передают мощность через металлические ролики, движущиеся против сопрягаемых металлических роликов. Соотношение входной / выходной скорости регулируется перемещением роликов для изменения
диаметры контактного тракта. Было использовано много различных форм валков и механических конструкций.
Гидравлические регулируемые приводы
Гидравлические приводы бывают трех типов: гидростатические, гидродинамические и гидровязкие.
Гидростатический привод состоит из гидронасоса и гидромотора. Поскольку используются поршневые насосы и двигатели, один оборот насоса или двигателя соответствует заданному объему потока жидкости, который определяется рабочим объемом независимо от скорости или крутящего момента. Скорость регулируется путем регулирования потока жидкости с помощью клапана или путем изменения рабочего объема насоса или двигателя. Было использовано множество различных вариантов дизайна. В приводе наклонной шайбы используется аксиально-поршневой насос и / или двигатель, в котором угол наклонной шайбы может быть изменен для регулировки рабочего объема и, таким образом, регулировки скорости.
Гидродинамические приводы или гидравлические муфты используют масло для передачи крутящего момента между крыльчаткой на входном валу постоянной скорости и ротором на выходном валу регулируемой скорости. Гидротрансформатор в АКПП автомобиля — это гидродинамический привод.
Гидровязкий привод состоит из одного или нескольких дисков, соединенных с входным валом, прижатых к аналогичному диску или дисков, соединенных с выходным валом. Крутящий момент передается от входного вала к выходному валу через масляную пленку между дисками.Передаваемый крутящий момент пропорционален давлению гидравлического цилиндра, который сжимает диски вместе. Этот эффект можно использовать в качестве сцепления, такого как сцепление Хеле-Шоу, или в качестве привода с регулируемой скоростью, например, в редукторе с переменным передаточным числом Байера.
Бесступенчатая коробка передач (CVT)
Механические и гидравлические приводы с регулируемой скоростью обычно называются трансмиссиями или бесступенчатыми трансмиссиями, когда они используются в транспортных средствах, сельскохозяйственном оборудовании и некоторых других типах оборудования.
Электроприводы регулируемые
Виды контроля
Управление
может означать либо ручную регулировку — с помощью потенциометра или устройства с линейным эффектом Холла (которое более устойчиво к пыли и жирам), либо оно также может управляться автоматически, например, с помощью детектора вращения, такого как оптический энкодер кода Грея. .
Типы приводов
Существует три основных категории электроприводов: приводы с двигателями постоянного тока, приводы вихретокового действия и приводы с двигателями переменного тока.Каждый из этих общих типов можно разделить на множество разновидностей. Электроприводы обычно включают в себя как электродвигатель, так и блок или систему регулирования скорости. Термин привод часто применяется к контроллеру без двигателя. На заре развития технологии электроприводов использовались электромеханические системы управления. Позднее были разработаны электронные контроллеры с использованием различных типов электронных ламп. По мере появления подходящих твердотельных электронных компонентов в новые конструкции контроллеров включались новейшие электронные технологии.
Приводы постоянного тока
Приводы постоянного тока
— это системы управления скоростью двигателя постоянного тока. Поскольку скорость двигателя постоянного тока прямо пропорциональна напряжению якоря и обратно пропорциональна магнитному потоку двигателя (который является функцией тока возбуждения), для управления скоростью можно использовать либо напряжение якоря, либо ток возбуждения. В статье об электродвигателях описано несколько типов двигателей постоянного тока. В статье об электродвигателях также описываются электронные регуляторы скорости, используемые с различными типами двигателей постоянного тока.
Вихретоковые приводы
Вихретоковый привод (иногда называемый динамическим приводом по названию одной из наиболее распространенных торговых марок) состоит из двигателя с фиксированной скоростью (обычно асинхронный двигатель) и вихретоковой муфты.Муфта содержит ротор с фиксированной скоростью и ротор с регулируемой скоростью, разделенные небольшим воздушным зазором. Постоянный ток в обмотке возбуждения создает магнитное поле, которое определяет крутящий момент, передаваемый от входного ротора к выходному ротору. Контроллер обеспечивает регулирование скорости с обратной связью путем изменения тока муфты, позволяя муфте передавать только крутящий момент, достаточный для работы на желаемой скорости. Обратная связь по скорости обычно обеспечивается через встроенный тахометр переменного тока.
Вихретоковые приводы — это системы с регулируемым скольжением, энергия скольжения которых обязательно рассеивается в виде тепла.Поэтому такие приводы обычно менее эффективны, чем приводы с преобразованием переменного тока в постоянный ток. Двигатель развивает крутящий момент, необходимый для нагрузки, и работает на полной скорости. Выходной вал передает такой же крутящий момент на нагрузку, но вращается с меньшей скоростью. Поскольку мощность пропорциональна крутящему моменту, умноженному на скорость, входная мощность пропорциональна скорости двигателя, умноженной на рабочий крутящий момент, в то время как выходная мощность равна выходной скорости, умноженной на рабочий крутящий момент. Разница между скоростью двигателя и выходной скоростью называется скоростью скольжения .Мощность, пропорциональная скорости скольжения, умноженной на рабочий крутящий момент, рассеивается в муфте в виде тепла. Хотя частотно-регулируемый привод превосходит его в большинстве применений с регулируемой скоростью, вихретоковая муфта все еще часто используется для соединения двигателей с высокоинерционными нагрузками, которые часто останавливаются и запускаются, например штамповочные прессы, конвейеры, подъемное оборудование. , и некоторые более крупные станки, позволяющие плавный запуск с меньшими затратами на техническое обслуживание, чем механическое сцепление или гидравлическая трансмиссия.
Приводы переменного тока
Приводы переменного тока
— это системы управления скоростью двигателя переменного тока.
A Привод асинхронного двигателя с фазным ротором (WRIM) с регулируемым скольжением цепь. Наряду с вихретоковыми приводами, приводы WRIM на основе сопротивления потеряли популярность, поскольку они менее эффективны, чем приводы WRIM на основе переменного / постоянного-переменного тока и используются только в особых ситуациях.
Системы рекуперации энергии скольжения возвращают энергию в шину статора WRIM, преобразуя энергию скольжения и возвращая ее в источник питания статора. В противном случае такая рекуперированная энергия была бы потрачена в виде тепла в резистивных приводах WRIM. Приводы переменной скорости с рекуперацией энергии скольжения используются в таких приложениях, как большие насосы и вентиляторы, ветряные турбины, судовые силовые установки, большие гидронасосы / генераторы и маховики для аккумулирования энергии. Системы рекуперации энергии раннего скольжения с использованием электромеханических компонентов для преобразования переменного / постоянного тока в переменный (т.е., состоящий из выпрямителя, двигателя постоянного тока и генератора переменного тока) называются приводами Kramer , более современные системы, использующие частотно-регулируемые приводы (VFD), называются статическими приводами Kramer .
Как правило, частотно-регулируемый привод в его самой базовой конфигурации управляет скоростью асинхронного или синхронного двигателя, регулируя частоту мощности, подаваемой на двигатель.

При изменении частоты частотно-регулируемого привода в стандартных низкоэффективных приложениях с регулируемым крутящим моментом с использованием управления вольт-на-герц (В / Гц) отношение напряжения к частоте двигателя переменного тока может поддерживаться постоянным, а его мощность может варьироваться в диапазоне минимальные и максимальные рабочие частоты до базовой частоты.Работа с постоянным напряжением выше базовой частоты и, следовательно, с уменьшенным соотношением В / Гц, обеспечивает пониженный крутящий момент и постоянную мощность.
Рекуперативные приводы переменного тока — это тип привода переменного тока, который способен восстанавливать энергию торможения нагрузки, движущейся со скоростью, превышающей скорость двигателя (ремонтная нагрузка), и возвращать ее в энергосистему.
В статье о ЧРП представлена дополнительная информация об электронных регуляторах скорости, используемых с различными типами двигателей переменного тока.
См. Также
Список литературы

Эта страница последний раз была отредактирована 31 августа 2020 в 08:22
.
Что такое привод постоянного тока? Работа и типы приводов постоянного тока
Что такое приводы постоянного тока? Аналоговые и цифровые приводы постоянного тока
Технология привода постоянного тока эффективна, надежна, экономична, удобна для оператора и относительно проста в использовании. Привод постоянного тока имеет множество преимуществ по сравнению с приводами переменного тока, особенно для рекуперативных и мощных приложений. Приводы постоянного тока широко используются в промышленных приводах, чтобы обеспечить очень точное управление.
Что такое привод переменного тока? Работа и типы электрических приводов и VFD
Конечно, частотно-регулируемые приводы (VFD) и двигатели переменного тока теперь предлагают альтернативу приводам и двигателям постоянного тока, но есть много других приложений, где приводы постоянного тока широко используются, включая подъемные краны и подъемники, элеваторы, шпиндельные приводы, мотальные машины, бумагоделательные машины, дробилки и т. д.за счет преимуществ приводов постоянного тока. 
Что такое приводы постоянного тока?
Привод постоянного тока — это, по сути, система управления скоростью двигателя постоянного тока, которая подает напряжение на двигатель для работы с желаемой скоростью. Ранее переменное напряжение постоянного тока для управления скоростью промышленного двигателя постоянного тока создавалось генератором постоянного тока.
При использовании асинхронного двигателя генератор постоянного тока приводился в действие с фиксированной скоростью, а путем изменения поля генератора создавалось переменное напряжение.Вскоре после этого набор Ward Leonard был заменен ртутным дуговым выпрямителем, а затем и тиристорными преобразователями. В настоящее время семейство тиристорных устройств широко используется для управления скоростью двигателя постоянного тока.
Компоненты привода постоянного тока?
Основные компоненты системы привода постоянного тока показаны на рисунке ниже. 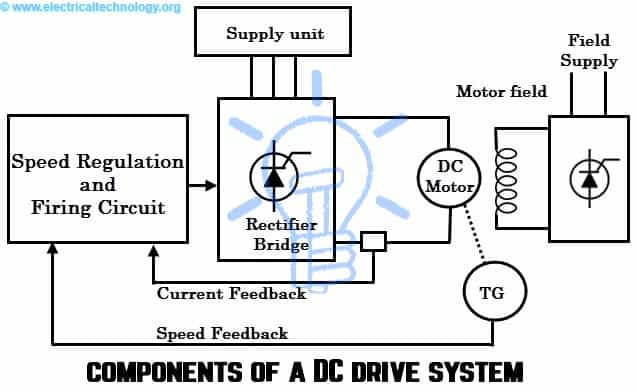 Вход привода постоянного тока: Некоторые приводы постоянного тока на основе тиристоров работают от однофазного источника питания и используют четыре тиристора для двухполупериодного выпрямления. Для более мощных двигателей требуется трехфазный источник питания, потому что формы волны намного более плавные.В таких случаях для двухполупериодного выпрямления требуется шесть тиристоров.
Вход привода постоянного тока: Некоторые приводы постоянного тока на основе тиристоров работают от однофазного источника питания и используют четыре тиристора для двухполупериодного выпрямления. Для более мощных двигателей требуется трехфазный источник питания, потому что формы волны намного более плавные.В таких случаях для двухполупериодного выпрямления требуется шесть тиристоров.
Мост выпрямителя: Силовой компонент управляемого привода постоянного тока представляет собой двухполупериодный мостовой выпрямитель, который может работать от трехфазного или однофазного источника питания. Как упоминалось выше, количество тиристоров может варьироваться в зависимости от напряжения питания.
Шестиристорный мост (в случае трехфазного преобразователя) выпрямляет поступающий переменный ток на постоянный ток, подаваемый на якорь двигателя. Регулировка угла зажигания этих тиристоров изменяет напряжение, подаваемое на двигатель.
Устройство полевого питания: Мощность, подаваемая на обмотку возбуждения, намного ниже, чем мощность якоря, поэтому чаще всего используется однофазное питание. Для подачи питания на обмотку возбуждения двигателя используется отдельный тиристорный мост или диодный выпрямитель.
Во многих случаях двухфазное питание поступает от трехфазного входа (который подает питание на якорь), и, следовательно, возбудитель возбуждения включен в блок питания якоря.
Функция блока питания возбуждения заключается в обеспечении постоянного напряжения на обмотке возбуждения для создания постоянного поля или магнитного потока в двигателе.В некоторых случаях этот блок снабжен тиристорами для уменьшения напряжения, приложенного к полю, чтобы управлять скоростью двигателя выше базовой.
В случае двигателей постоянного тока с постоянными магнитами полевой блок питания не входит в состав привода.
Блок регулирования скорости : Он сравнивает инструкцию оператора (желаемую скорость) с сигналами обратной связи и отправляет соответствующие сигналы в цепь запуска. В аналоговых приводах этот блок регулятора состоит из регуляторов напряжения и тока.Регулятор напряжения принимает ошибку скорости как вход и выдает выходное напряжение, которое затем подается на регулятор тока.
Затем регулятор тока выдает требуемый ток зажигания в цепь зажигания. Если требуется большая скорость, от регулятора напряжения вызывается дополнительный ток, и, следовательно, тиристоры проводят больше времени. Как правило, это регулирование (как напряжения, так и тока) осуществляется с помощью контроллеров пропорционально-интегрально-производной.
Регулятор тока возбуждения также предусмотрен там, где требуется скорость выше базовой.
В современных цифровых микропроцессорных приводах регулирование скорости достигается с помощью справочной таблицы для определения тока в цепи зажигания с помощью дополнительных цифровых схем.
Цепь запуска : она подает импульсы затвора на тиристоры, чтобы они включались на определенные периоды для создания переменного напряжения якоря. В этой схеме управления затвором также предусмотрена изоляция.
Принцип работы приводов постоянного тока
В двигателях постоянного тока скорость пропорциональна напряжению якоря и обратно пропорциональна току возбуждения.Кроме того, ток якоря пропорционален крутящему моменту двигателя. Следовательно, увеличивая или уменьшая приложенное напряжение, скорость двигателя изменяется. Однако это возможно до номинального напряжения. Если требуется скорость больше, чем базовая скорость, необходимо уменьшить ток возбуждения двигателя.  За счет уменьшения тока возбуждения уменьшается магнитный поток в двигателе. Уменьшение тока возбуждения снижает противоэдс якоря. Чем меньше ЭДС противоякоря, тем больше протекает ток якоря.Кроме того, этот ток якоря увеличивает крутящий момент двигателя и, следовательно, скорость. Это два основных принципа, используемых в приводах постоянного тока для управления скоростью двигателя.
За счет уменьшения тока возбуждения уменьшается магнитный поток в двигателе. Уменьшение тока возбуждения снижает противоэдс якоря. Чем меньше ЭДС противоякоря, тем больше протекает ток якоря.Кроме того, этот ток якоря увеличивает крутящий момент двигателя и, следовательно, скорость. Это два основных принципа, используемых в приводах постоянного тока для управления скоростью двигателя.
В приводах постоянного тока с управлением якорем приводной блок обеспечивает номинальный ток и крутящий момент на любой скорости от нуля до основания двигателя. Изменяя напряжение якоря, можно получить переменную скорость, как показано на рисунке.
Обычно в этих приводах постоянного тока предусмотрено постоянное питание возбуждения. Поскольку крутящий момент является постоянным (который описывает тип нагрузки) в диапазоне скоростей, выходная мощность двигателя пропорциональна скорости (HP = T × N / 525).Характеристики двигателя этого привода показаны ниже.  В случае приводов, управляемых якорем и полем, напряжение якоря на двигателе регулируется для работы с постоянным крутящим моментом и переменным крутящим моментом вплоть до базовой скорости двигателя. А для работы на указанной выше базовой скорости привод переключается на управление полем для работы с постоянным пониженным крутящим моментом в л.с. до максимальной скорости, как показано на рисунке ниже. В этом случае уменьшение тока возбуждения увеличивает скорость двигателя до максимальной скорости, как показано на рисунке.
В случае приводов, управляемых якорем и полем, напряжение якоря на двигателе регулируется для работы с постоянным крутящим моментом и переменным крутящим моментом вплоть до базовой скорости двигателя. А для работы на указанной выше базовой скорости привод переключается на управление полем для работы с постоянным пониженным крутящим моментом в л.с. до максимальной скорости, как показано на рисунке ниже. В этом случае уменьшение тока возбуждения увеличивает скорость двигателя до максимальной скорости, как показано на рисунке.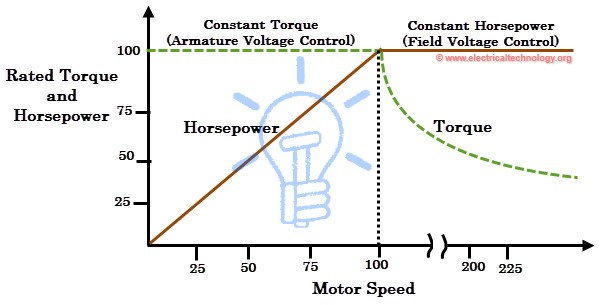
Цифровые и аналоговые приводы постоянного тока

В настоящее время цифровые реализации заменили аналоговые схемы системы электропривода во всех формах промышленного управления. Цифровые контроллеры предлагают большую гибкость для обеспечения точного управления, самонастройки и простоты взаимодействия с хост-компьютерами и другими приводами. Однако базовое понимание аналоговой версии привода постоянного тока делает менее трудным понимание его цифрового эквивалента. Давайте посмотрим на оба этих привода постоянного тока.
Аналоговые приводы постоянного тока
Стандартный аналоговый привод постоянного тока с регулировкой скорости и тока показан на рисунке ниже. Задача этой системы — обеспечить управление скоростью, и, следовательно, задание скорости становится входом в систему, а скорость двигателя — выходом системы, который измеряется тахометром.
Этот привод работает следующим образом; Учтите, что двигатель работает с заданной скоростью. Теперь сигнал задания скорости увеличился до несколько больше, чем фактическая скорость.Таким образом, на левом суммирующем соединении будет сигнал скорости ошибки, как показано на рисунке. Эта ошибка скорости указывает на необходимое ускорение двигателя, что означает крутящий момент и, следовательно, больший ток.
Ошибка усиливается контроллером скорости (который, по сути, является усилителем ошибки скорости), и его выходной сигнал выдается как входной сигнал тока для внутренней системы управления. По мере увеличения задания по току внутренний контроллер тока подает больший ток на двигатель, тем самым обеспечивая дополнительный крутящий момент.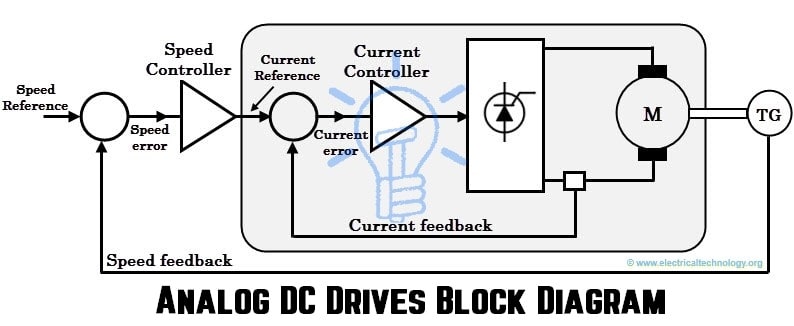 Внутренний контур тока отвечает за поддержание текущей ошибки между фактическим током электродвигателя и током опорного сигналом, который означает сделать фактический ток двигателя следовать эталонному току нулевой. Усиленный сигнал ошибки тока от контроллера тока управляет углом срабатывания моста и, следовательно, выходным напряжением преобразователя. Обратная связь по току обеспечивается трансформатором постоянного тока или трансформатором переменного тока (с выпрямителем) в основных линиях питания.
Внутренний контур тока отвечает за поддержание текущей ошибки между фактическим током электродвигателя и током опорного сигналом, который означает сделать фактический ток двигателя следовать эталонному току нулевой. Усиленный сигнал ошибки тока от контроллера тока управляет углом срабатывания моста и, следовательно, выходным напряжением преобразователя. Обратная связь по току обеспечивается трансформатором постоянного тока или трансформатором переменного тока (с выпрямителем) в основных линиях питания.
Вся эта операция выполняется усилителем ошибки тока с высоким коэффициентом усиления.В большинстве случаев этот усилитель представляет собой схему пропорционально-интегрального управления (PI), которая поддерживает точный и требуемый токи одинаковыми в установившихся условиях. Этот регулятор тока также ограничивает ток через двигатель, учитывая минимальные и максимальные токи двигателя.
Внешний контур обеспечивает управление скоростью путем сравнения фактической скорости, полученной тахогенератором постоянного тока, с желаемой или требуемой скоростью из задания скорости. Эти два входа подаются на усилитель ошибки скорости, а затем полученная ошибка усиливается и применяется в качестве входа для регулятора тока.
Усилитель скорости вырабатывает выходной ток, пропорциональный погрешности скорости. Для этого усилителя также используется ПИ-регулирование (с использованием аналоговой электроники) для достижения нулевой ошибки установившегося состояния. Благодаря этому фактическая скорость двигателя поддерживается точно на уровне эталонной скорости для всех нагрузок.
Цифровые приводы постоянного тока

С развитием цифрового управления приводы постоянного тока становятся более гибкими и быстрыми (из-за меньшего времени отклика) по сравнению с аналоговыми приводами.Схема цифрового привода постоянного тока показана на рисунке ниже; Конечно, это похоже на аналоговую схему, но здесь аналоговая схема (аналоговые усилители) заменена цифровой схемой. 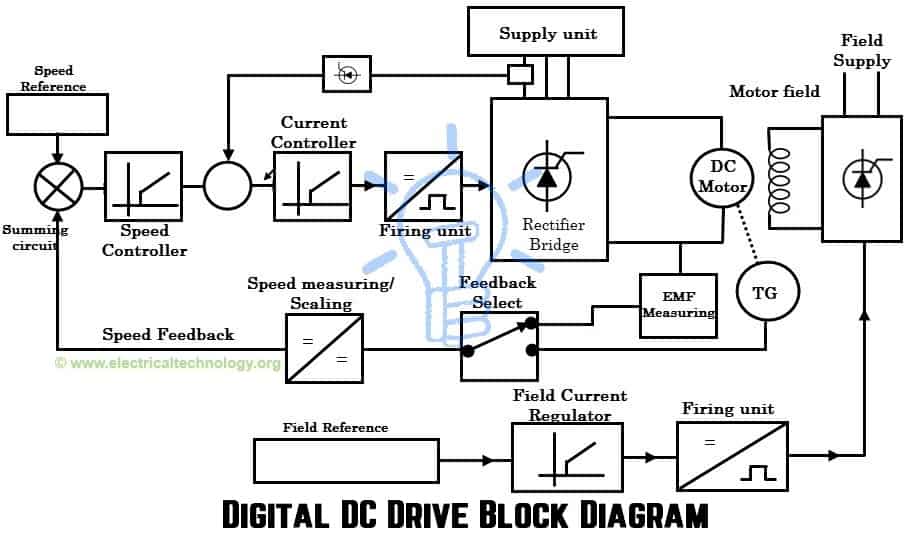 Сигнал задания скорости, заданный как вход привода, по сравнению со скоростью обратной связи в суммирующей цепи. Если на выходе схемы суммирования имеется положительная ошибка, указывающая на то, что требуется увеличение скорости, и если она генерирует отрицательную ошибку, указывающую на необходимость уменьшения скорости (поскольку двигатель работает на более высокой скорости, чем желаемая).
Сигнал задания скорости, заданный как вход привода, по сравнению со скоростью обратной связи в суммирующей цепи. Если на выходе схемы суммирования имеется положительная ошибка, указывающая на то, что требуется увеличение скорости, и если она генерирует отрицательную ошибку, указывающую на необходимость уменьшения скорости (поскольку двигатель работает на более высокой скорости, чем желаемая).
Ошибка скорости передается контроллеру скорости в микропроцессоре, который определяет выходное напряжение для работы двигателя с желаемой скоростью. В то же время регулятор тока в микропроцессоре определяет запускающие сигналы для тиристоров в мостовом преобразователе. Затем тиристоры преобразуют трехфазное питание в питание постоянного тока в зависимости от желаемой скорости.
Этот привод может работать в разомкнутом контуре без какой-либо обратной связи и может достигать регулирования скорости 5-8%. Однако во многих случаях требуется регулирование скорости менее 5%.В таких случаях блок измерения / масштабирования скорости переключается на цепь измерения обратной связи по ЭДС.
Эта цепь обратной связи измеряет напряжение якоря, масштабирует его пропорционально выходному напряжению (функция масштабирования в микропроцессоре) и передает его в схему суммирования. Далее он преобразуется в сигнал ошибки скорости в контроллере скорости.
Если требуется регулирование скорости менее 1%, используется обратная связь от генератора тахометра. Таким образом, цепь измерения / масштабирования скорости затем переключается на обратную связь с тахометра.Эта обратная связь обеспечивает очень точное управление по сравнению с обратной связью по ЭДС.
Также для управления полем (скорость выше номинальной) этот привод включает в себя отдельный возбудитель поля. Регулятор тока возбуждения в микропроцессоре определяет напряжение на обмотках возбуждения, принимая опорный сигнал магнитного потока / поля от оператора. Этот регулятор обеспечивает запускающие сигналы, необходимые блоку преобразователя поля для создания необходимого постоянного напряжения, пропорционального скорости.
Что внутри Power Conversion делает приводы постоянного тока SCR?
Кремниевые управляемые выпрямители (SCR) — широко используемые тиристоры для больших приводов двигателей постоянного тока в блоках преобразования мощности.SCR проводит при подаче небольшого напряжения на его вывод затвора. Его проводимость продолжается до начала отрицательного цикла, и он автоматически выключается, когда напряжение на тиристоре достигает естественного нуля, до следующего стробируемого сигнала.
Целью использования этих тиристоров в приводах постоянного тока является преобразование постоянного источника переменного тока в переменный источник постоянного тока, который контролирует скорость двигателя. 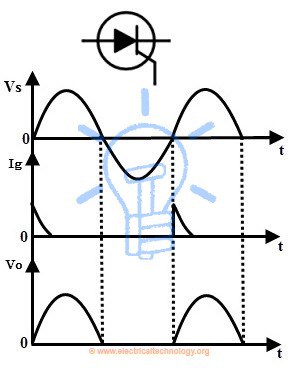 Как обсуждалось ранее, некоторые приводы SCR постоянного тока питаются от однофазного источника переменного тока и используют четыре SCR в виде моста для выпрямления постоянного тока.В случае приводов постоянного тока большой мощности для выпрямления постоянного тока используется трехфазный источник питания с шестью тиристорами.
Как обсуждалось ранее, некоторые приводы SCR постоянного тока питаются от однофазного источника переменного тока и используют четыре SCR в виде моста для выпрямления постоянного тока.В случае приводов постоянного тока большой мощности для выпрямления постоянного тока используется трехфазный источник питания с шестью тиристорами.
В случае четырехквадрантной работы (движение вперед, торможение вперед, движение назад и торможение назад) привода постоянного тока используется мостовой выпрямитель, состоящий из 12 тиристоров с трехфазным входящим питанием. Во время каждой операции в квадранте тиристоры срабатывают при сдвиге фаз, чтобы обеспечить двигатель необходимым постоянным напряжением.
Подключение тиристоров (для четырехквадрантного режима привода) от входящего трехфазного источника переменного тока к выходу постоянного тока показано на рисунке ниже.В этом случае мост SCR с двигателем и мост SCR с регенерацией обеспечивают работу в четырех квадрантах управления путем приема соответствующих сигналов затвора от (аналогового или цифрового) контроллера.
Если тиристоры были стробированы с фазовым углом в ноль градусов, то привод функционировал как выпрямитель, который подает на двигатель полностью выпрямленный номинальный постоянный ток, и, изменяя угол включения тиристоров, применяется переменный источник постоянного тока. мотор. 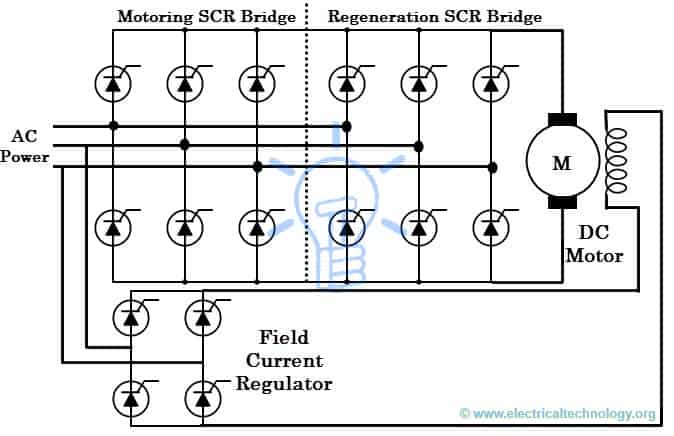 Форма кривой выходного напряжения постоянного тока по отношению к форме волны переменного тока для вышеуказанной схемы показана ниже.Это среднее выходное напряжение постоянного тока получается для фазовых углов зажигания 40 0 , 32 0 и 24 0 . Таким образом, средний выходной сигнал регулируется путем изменения фазовых углов включения SCR.
Форма кривой выходного напряжения постоянного тока по отношению к форме волны переменного тока для вышеуказанной схемы показана ниже.Это среднее выходное напряжение постоянного тока получается для фазовых углов зажигания 40 0 , 32 0 и 24 0 . Таким образом, средний выходной сигнал регулируется путем изменения фазовых углов включения SCR. 
Поскольку для обмотки возбуждения также требуется стабилизированный источник постоянного тока, в мостовом преобразователе возбуждения используются только четыре тиристора. Это связано с тем, что поле никогда не требует отрицательного тока и, следовательно, не требуется другой набор тиристоров, которые использовались в якоре для реверсирования двигателя.
В современных приводах постоянного тока тиристоры полностью заменены на полевые МОП-транзисторы и биполярные транзисторы с изолированным затвором (IGBT), чтобы обеспечить высокую скорость переключения, чтобы исключить искажение входящей мощности переменного тока и токов во время переключения. Следовательно, привод становится более эффективным и точным.
Как описано в статье приводов переменного тока , приводы постоянного тока также доступны в виде модульных блоков, которые включают аналоговые и цифровые входы / выходы, многофункциональные клавиатуры, удаленные панели оператора в дополнение к возможностям программирования и настройки программного обеспечения от различных производителей, таких как как ABB, Siemens, Rockwell automation, Emerson и др.Они могут быть подключены к другим приводам или хосту компьютера через коммуникационные кабели.  Программирование макросов этих приводов позволяет реализовать любую структуру управления в приложении. Они также могут принимать сигналы дистанционного управления от удаленных программируемых логических контроллеров через системы связи по полевой шине.
Программирование макросов этих приводов позволяет реализовать любую структуру управления в приложении. Они также могут принимать сигналы дистанционного управления от удаленных программируемых логических контроллеров через системы связи по полевой шине.
.
Имитация привода двигателя постоянного тока
— MATLAB и Simulink
Семь моделей приводов постоянного тока библиотеки, обозначенных от DC1 до DC7, основаны на DC
щеточный двигатель в библиотеке Electric Drives. Как и в любом электродвигателе, щеточный электродвигатель постоянного тока
состоит из статорной (неподвижной) части и роторной (подвижной) части. Щеточный двигатель постоянного тока
также имеет два типа обмоток — обмотка возбуждения или возбуждения и якорь.
обмотка. Как следует из названия, обмотка возбуждения используется для создания магнитного возбуждения.
поле в двигателе, в то время как катушки якоря проводят индуцированный ток двигателя.поскольку
постоянная времени ( L / R ) цепи якоря намного меньше
чем у обмотки возбуждения, регулирование скорости путем изменения напряжения якоря
быстрее, чем изменение напряжения возбуждения. Поэтому поле возбуждения питается от
источник постоянного напряжения постоянного тока, а обмотки якоря питаются от источника переменного постоянного тока.
Последний источник представляет собой тиристорный преобразователь с фазовым регулированием для DC1 to
Модели DC4 и транзисторный прерыватель для моделей DC5, DC6 и DC7.Тиристор
преобразователь питается от однофазного источника переменного тока для DC1 и DC2 и от трехфазного переменного тока.
источник для DC3 и DC4. Наконец, модели постоянного тока могут работать в наборах квадрантов.
Пример: привод двигателя постоянного тока на базе тиристорного преобразователя
В этом примере вы создаете и моделируете простой привод двигателя постоянного тока на основе тиристорного преобразователя:
В примере используется модель DC3 с параметром двигателя постоянного тока мощностью 200 л.с., установленным во время регулирования скорости.
Блок DC3 моделирует привод двухквадрантного трехфазного тиристорного преобразователя.Мотор
подключается к нагрузке и приводится в движение до номинальной скорости 1750 об / мин.
Получить модель DC3 из библиотеки электроприводов
Откройте новое окно и сохраните его как
DC_example.Добавьте двухквадрантный трехфазный выпрямитель постоянного тока
Блок Drive из>>>> библиотеки вDC_example
окно.
Подключите модель DC3 к источнику напряжения
Все модели библиотеки имеют три типа входов: электрическое питание
входы, вход уставки скорости или крутящего момента (SP) и механический крутящий момент
вход (Tm).Поскольку модель DC3 представляет собой трехфазный привод, в ней представлены три
электрические входы: A, B и C. Чтобы модель DC3 работала, вы должны
подключите эти входы к соответствующему источнику напряжения:
Добавьте блок трехфазного источника из
>>>> библиотеку в вашу схему. Подключите источник напряжения
выходы A, B и C на входы DC3 A, B и C соответственно.из трехфазного тиристорного выпрямительного моста выдается
на, где Vl, rms — среднеквадратичное значение межфазного напряжения
трехфазный источник напряжения и α угол зажигания
стоимость тиристоров. Для лучшего контроля напряжения, более низкий обжиг
ограничение угла обычно накладывается, и максимальное среднее выходное напряжение
доступный от выпрямительного моста, таким образом, равен, где α мин — нижний
ограничение угла стрельбы.В нашем случае нижний предел угла открытия, используемый в
модель DC3 — 20 градусов. При таком значении угла и для того, чтобы
иметь максимальное значение среднего выходного напряжения 500 В для управления
Двигатель мощностью 200 л.с. до его номинальной скорости, необходимое среднеквадратичное значение между фазами
значение напряжения, указанное в предыдущем уравнении, составляет 370 В.
привод подключен к американской электрической сети, ближайшая
стандартное значение напряжения 460 В.Установите среднеквадратичное значение межфазного напряжения источника переменного тока на
460 В и частотой до 60 Гц. Назовите источник переменного тока460 В 60.
ГцОбратите внимание, что значения амплитуды и частоты источника напряжения, необходимые для
каждую модель привода из библиотеки Electric Drives можно найти в
справочные заметки. Также указаны номинальные значения соответствующих двигателей.
включены.В таблице приведены значения, соответствующие DC3 200 л.с.
модель.Вход привода
НапряжениеАмплитуда
460 В
Частота
60 Гц
Номинал двигателя
ЗначенияМощность
200 л.с.
Скорость
1750 об / мин
Напряжение
500 В
Чтобы представить реальный трехфазный источник, необходимо указать
правильное сопротивление источника R и индуктивность
L значений.Для их определения обычно используют
значение мощности короткого замыкания
P sc и заданный X
/ R отношение, где X = L⋅ω, ω — угловая частота
источник напряжения. Как показывает опыт, потребляемая мощность короткого замыкания
импеданс источника должен быть как минимум в 20 раз больше, чем
номинальная мощность привода, а
X / Соотношение R обычно близко к
10 для промышленных предприятий.Значение полного сопротивления источника Z получается как
, где В — среднеквадратичное значение межфазного напряжения
источник напряжения. Для высоких X / R
Коэффициент r , сопротивление источника
R примерно равно, а индуктивность источника L от до
В этом примере среднеквадратичное межфазное напряжение равно 460 В, а
частота источника 60 Гц.Если принять мощность короткого замыкания 25
умноженное на номинальную мощность привода, получаем полное сопротивление источника 0,056 Ом.
Для соотношения X / R равного 10, используя
Уравнение 1 и уравнение 2, мы находим значение сопротивления 0,0056 Ом и значение индуктивности
0,15 мГн.Сбросьте Задайте импеданс, используя
установите флажок уровня короткого замыкания и установите источник переменного тока
значение сопротивления до 0.0056 Ом и индуктивность до 0,15 мГн.
Подключение модели DC3 к механической нагрузке
Вход Tm представляет крутящий момент нагрузки, приложенный к валу двигателя постоянного тока.
Если значения момента нагрузки и скорости имеют противоположные знаки, то
момент ускорения будет суммой электромагнитного момента и момента нагрузки.
Многие моменты нагрузки пропорциональны скорости ведомой нагрузки, например
представлен уравнением
| Tmec = K⋅ωm = K′⋅Nm | (3) |
, где ω м — скорость в рад / с, а
N скорость в об / мин.Теперь вы построите такой
нагрузка.
Для расчета момента механической нагрузки этого типа скорость двигателя постоянного тока равна
необходимо. Его можно получить, используя выходы модели DC3. Все
модели приводов библиотеки Electric Drives имеют четыре выходных вектора: Motor,
Конв., Ctrl и Wm. Вектор двигателя содержит все связанные с двигателем переменные,
Конв. вектор содержит все значения напряжения и тока преобразователя, вектор Ctrl
содержит все важные для регулирования значения, такие как скорость или крутящий момент
опорные сигналы, ошибка регулирования скорости или крутящего момента, значение угла зажигания,
и так далее, а Wm — скорость двигателя в рад / с.Все описания ввода-вывода
доступны на справочной странице каждой модели.
Скорость двигателя (Втм) можно умножить на постоянную K
Уравнение 3 для получения сигнала крутящего момента нагрузки, который должен быть подключен к входу Tm DC3
модель:
Создайте следующую подсистему и назовите ее
Линейный момент нагрузки.Константу K можно вычислить, зная, что при
номинальная скорость, двигатель должен развивать номинальный крутящий момент.Как показано в
таблица, содержащая значения, соответствующие модели DC3 200 л.с.,
двигатель постоянного тока, используемый в этом моделировании, имеет номинальную скорость
Н м, Н 1750 об / мин.
Поскольку номинальная механическая выходная мощность
П м, н мотора
200 л.с., номинальная механическая нагрузка крутящий момент
T mec, n можно вычислить
по уравнению 4 (где вязкое трение не учитывается)Pm, n = Tmec, n⋅ωm, n = Tn⋅π⋅Nm, n30 (4) где ω м, n — номинальный
скорость в рад / с.Используя это уравнение, находим номинальный механический крутящий момент
814 Нм Наконец, уравнение 3 дает нам значение K , равное 4,44.Установите постоянное значение линейного момента нагрузки.
блок к4.44.Подключите вход и выход линейной нагрузки
блок крутящего момента на вход Wm и Tm блока DC3, соответственно. Твой
модель теперь должна выглядеть следующим образом.
Определение уставки
Входной уставкой модели DC3 может быть либо значение скорости (в об / мин), либо
значение крутящего момента (в Н-м) в зависимости от режима регулирования (скорость или крутящий момент
регулирование). В этом примере мы установим блок DC3 в режим регулирования скорости.
и довести двигатель постоянного тока мощностью 200 л.с. до номинальной скорости 1750 об / мин.
Добавить блок Constant в
DC_example.Подключите блок Constant к набору
точки входа модели DC3 и назовите егоSpeed.
СсылкаУстановите уставку на 1750 об / мин.
Визуализация внутренних сигналов
Теперь вы должны использовать выходы модели DC3 для визуализации интересных сигналов с помощью
сфера. Предположим, вам необходимо визуализировать следующие сигналы:
Угол включения тиристорного моста
Напряжение якоря двигателя
Ток якоря двигателя и задание
Задание скорости и скорость двигателя
Обратите внимание, что все описания ввода-вывода модели можно найти в
соответствующие справочные примечания.Загляните под маску DC3
блок, чтобы увидеть, какие сигналы подключены к выходам DC3. в
Блок Вкладка, нажмите Искать под
Маска .
Как вы можете видеть ниже, угол стрельбы содержится внутри вывода Ctrl
вектор. Угол открытия Alpha (см. Справочные примечания к блоку DC3) — второй
элемент этого вектора.
Вектор двигателя (показан на следующем рисунке) содержит три необходимых
сигналы.Сигналы напряжения и тока якоря — это первый и третий
элементы соответственно. Скорость — второй элемент двигателя.
вектор.
Наконец, сигналы задания тока и скорости — это первый и четвертый
элементы вектора Ctrl соответственно (см. следующий рисунок). Обратите внимание, что
Ref. сигнал в блоке переключателя регулирования будет опорным моментом в
режим регулирования крутящего момента.
Сигналы тока и напряжения внутреннего моста могут быть извлечены с помощью Conv.
выход, который подключен к выходу мультиметра. Чтобы просмотреть эти сигналы, добавьте
Блок мультиметра из библиотеки>>>> в вашу схему. Нажав на блок мультиметра, вы можете
выберите сигналы преобразователя, которые вы хотите вывести. См. Справочную страницу блока мультиметра.
для получения дополнительной информации о том, как использовать блок мультиметра.
Теперь, используя блок Selector, вы можете извлечь необходимые
сигналы от трех выходных векторов для их визуализации:
Создайте следующую подсистему, чтобы извлечь все
необходимые сигналы визуализации. Назовите егоSignal.
СелекторПодключите выходы Motor, Conv. И Ctrl
Блок DC3 к двигателю, конв., и Ctrl входы
ваш блок выбора сигналов.Скопируйте два блока Scope в вашу модель.
Они будут использоваться для отображения выходных сигналов Signal
Блок селектора и блок мультиметра. За
первая область, откройте диалоговое окно Параметры области
коробка. На вкладке Общие установите количество осей равным
4, диапазон времени моделирования до
autoи используйте прореживание
20.Очистите предельные точки данных , чтобы
последний флажок в истории данных
таб. Подключите четыре выхода селектора сигналов.
блок на входы области. Подключите выход блока мультиметра к
ввод второй области.
Установка среды моделирования с фиксированным шагом
Все модели накопителей в библиотеке являются дискретными.Чтобы смоделировать ваш
системе, вы должны теперь указать правильный временной шаг моделирования и установить
вариант решателя с фиксированным шагом. Рекомендуемые значения времени выборки для приводов постоянного тока, переменного тока
приводов и механических моделей можно найти в разделах «Примечания»
соответствующие страницы со ссылками на блоки. Рекомендуемое время выборки для DC3
модель 5 мкс. Выполните следующие действия:
Добавьте блок Powergui из библиотеки>>> в
DC_example.Открыть
Powergui, нажмите Настроить
Параметры , а в диалоговом окне параметров блока Powergui
установите Тип моделирования на
Дискретный. Установите время выборки на 5
мкс.На вкладке Simulation щелкните
Настройки модели . Выбрать
Решатель .Под решателем
выбор выборфиксированный шаг
идискретный (без непрерывных состояний). Установить
время остановки до12секунд.
Перед моделированием схемы необходимо сначала установить правильный внутренний DC3.
параметры.
Установка набора параметров привода высокой мощности
Многие модели библиотеки Electric Drives имеют два набора параметров:
комплект малой мощности и комплект высокой мощности.По умолчанию все модели изначально загружаются с низким энергопотреблением. Параметры модели DC3 в настоящее время
загруженные в DC_example — это накопители мощностью 5 л.с.
Теперь вы установите параметры привода большой мощности, которые соответствуют 200 л.с.
привод. Для этого вы будете использовать графический интерфейс пользователя:
Откройте интерфейс пользователя, дважды щелкнув блок DC3.
Интерфейс разделен на три основные части привода
система: параметры двигателя (вкладка DC Machine ),
параметры конвертера (вкладка Converter ), а
параметры регулирования контроллера привода
(Вкладка Контроллер ).Чтобы загрузить параметры 200 л.с., нажмите кнопку
Загрузить кнопка.При нажатии кнопки Загрузить открывается окно
содержащие файлы параметров малой и высокой мощности каждого переменного и
Появляется модель постоянного тока. Эти файлы содержат все параметры, используемые
графический пользовательский интерфейс. Имя каждого файла начинается с модели
имя, за которым следует значение мощности.Таким образом, версия DC3 мощностью 200 л.с.
с именемdc3_200hp_params.Выберите
dc3_200hp_params.mat
файл и щелкните Загрузить .
Параметры 200 л.с. теперь загружены. Обратите внимание, что вы также можете сохранить пользовательский диск
параметры с помощью кнопки Сохранить . Когда вы это сделаете, ваш
пользовательские параметры сохраняются в формате MAT-файла и могут быть перезагружены в любой момент.
время.2.
Нажмите ОК , чтобы применить изменения
и закройте диалоговое окно.
Установите параметры контроллера DC3 и результаты моделирования
Контроллеры скорости и тока блока DC3 являются обоими
состоит из пропорционально-интегрального регулятора. Вы можете найти подробности на
регуляторы каждой модели привода на страницах справочника соответствующего блока. В
пользовательский интерфейс каждой модели содержит схему контроллера привода
внутренняя структура.
Откройте пользовательский интерфейс. Щелкните значок
Контроллер , а затем
Схема кнопка.Все параметры регулирования по умолчанию (регулятор скорости и тока
параметры) были обрезаны для инерции «без нагрузки».
Поскольку инерция была изменена, необходимо внести некоторые изменения в
регулятор скорости.Текущий контроллер не должен быть изменен,
изменение инерции мало влияет на текущий контроль.Чтобы визуализировать изменения, которые необходимо внести, запустите
моделирование настоящей схемы.Запустите симуляцию. Результаты моделирования
визуализированные на телескопе показаны ниже.Ток якоря соответствует эталонному, но достигает насыщения до 450 А
во время фазы разгона.Эта насыщенность является результатом
предел задания регулятора тока 1,5 о.е., что, в свою очередь, вызывает
недостаточный момент разгона. Мотор не может следовать за 650
об / мин / с изменение скорости по умолчанию. Потому что момент ускорения не может быть
увеличена, чтобы избежать перегорания цепи якоря, рампа скорости
должен быть снижен на ту же величину, на которую увеличилась инерция.2 инерция с использованием новой инерции
Я .Член B⋅ω представляет вязкое трение в приводе.
где B — коэффициент вязкого трения.В этом случае мы уменьшаем рампу скорости немного меньше, чем
увеличение инерции, чтобы иметь достаточно высокое ускорение, и установите его
до 200 об / мин / с.Откройте пользовательский интерфейс.В разделе Контроллер ,
установить параметр ускорения скорости в меню регулятора скорости
до200 об / мин / с.Запустите моделирование и посмотрите новые результаты на
размах.Текущее регулирование очень хорошее, и регулятор тока не меняется
будет предпринято. Регулировка скорости удовлетворительная, но некоторые
Возможны улучшения: начальное отслеживание задания скорости
может быть быстрее, а превышение скорости и небольшая ошибка линейного изменения скорости
встречающиеся во время фазы ускорения, можно уменьшить.Модификация
пропорционального и интегрального усиления ПИ-регулятора скорости позволяет
для достижения этих целей:Увеличивая пропорциональное усиление регулятора скорости,
вы увеличиваете чувствительность контроллера, потому что он сильно реагирует
от более быстрого до небольших ошибок регулирования скорости. В результате первоначальный
отслеживание задания скорости улучшено, потому что текущий
ссылка, выдаваемая регулятором скорости, реагирует быстрее.Увеличение интегрального усиления позволяет скорости двигателя
догнать заданную скорость намного быстрее во время
периоды нарастания, что приводит к более быстрой реакции на малую скорость
погрешность интегральных членов, возникающих при регулировании сигнала
после съезда. Контроллер отреагирует, чтобы уменьшить
интеграл погрешности скорости намного быстрее, производя немного
более высокий момент ускорения после ускорения
рампа.
Слишком большое увеличение пропорционального и интегрального усиления может вызвать
нестабильность, контроллер становится сверхчувствительным. Слишком высокая прибыль может
также вызывают насыщение тока. Простой способ отрегулировать скорость
усиления контроллера заключается в постепенном их увеличении и моделировании
новая конфигурация после каждого изменения до желаемой системы
получены характеристики (метод проб / ошибок).Когда необходимо обрезать регулятор тока, хороший способ добиться
это необходимо для того, чтобы ротор оставался неподвижным, устанавливая очень высокий суммарный момент инерции.
ценность. Это позволяет разделить электрическое и механическое
параметры. Затем вы регулируете текущие параметры контроллера, пока
current идеально соответствует текущим ссылкам. Тот же процесс
применимо к регулятору тока, как те, что сделаны выше для скорости
регулирование.Как только регулятор тока будет подрезан, вы можете подрезать
регулятор скорости путем сброса комбинированной инерции на начальное
ценность.Попробуйте другие значения регулятора скорости и соблюдайте
в результате изменения в динамике системы. Пропорциональное усиление 80 и
как показано, интегральный коэффициент усиления 200 дает очень хорошие результаты.
Значение угла открытия уменьшается с увеличением скорости, чтобы создать
растущее выходное напряжение преобразователя.Преобразователь здесь работает в выпрямителе
режим, мощность, передаваемая от источника переменного тока к двигателю постоянного тока. Напряжение
увеличение позволяет преобразователю продолжать подавать ток на двигатель постоянного тока во время
фазе ускорения, напряжение якоря увеличивается пропорционально
скорость. Увеличение тока, наблюдаемое на этом этапе, связано с увеличением
крутящий момент противодействует нагрузке. Примерно через t = 8,5 с скорость достигает заданного значения,
и ток якоря снижается примерно до 335 А, так как больше нет ускоряющего момента.
необходим.
Прежде чем завершить этот пример, обратите внимание на два фильтра первого порядка, используемые в
схемы регуляторов скорости и тока на принципиальной схеме регулятора. Эти
фильтры удаляют нежелательные гармоники тока и скорости в токе и скорости
сигналы измерения. Эти гармоники вызваны выпрямленными выходными напряжениями.
трехфазных полных преобразователей. Основная частота пульсаций, вносимая
трехфазный полный преобразователь в шесть раз больше частоты источника напряжения
(6-я гармоника).В случае этого примера частота первой гармоники равна
таким образом равняется 360 Гц. Частота среза фильтров первого порядка должна составлять
как минимум ниже 360 Гц. Поскольку фильтры являются фильтрами первого порядка,
частота среза должна быть намного ниже, чтобы иметь достаточно хорошую гармонику
отказ. Имейте в виду, что слишком низкая частота среза может привести к тому, что система
нестабильность. В случае приводов прерывателя, таких как DC5, DC6 и DC7,
основная частота равна частоте ШИМ.
Моделирование в режиме среднего значения
Большинство моделей приводов можно моделировать в режиме среднего значения. В таком режиме
Блоки Universal Bridge используются для моделирования преобразователей энергии, приводящих в движение двигатели.
заменяются преобразователями среднего значения. Модели преобразователей среднего значения
используемые описаны на справочных страницах каждой модели привода. Это позволяет вам
увеличить временной шаг моделирования и тем самым увеличить скорость моделирования.
Используйте следующую процедуру для моделирования модели в режиме среднего значения.
Откройте пользовательский интерфейс. Выберите
Средний вариантв модели Деталь модели
выпадающий список уровня .Выберите преобразователь
раздел.Обратите внимание, что он содержит некоторые дополнительные параметры, относящиеся к
режим среднего значения.Эти параметры влияют на внешний источник напряжения.
и используются выпрямителем среднего значения.При моделировании в режиме среднего значения можно увеличить временной шаг
для более быстрого моделирования. Рекомендация — увеличить время
переходите к наименьшему времени выборки контроллера, используемому в модели. В
в этом случае время выборки одинаково для скорости и тока.
контроллеров и равно 100 мкс.Закройте пользовательский интерфейс и откройте блок powergui. Установлен
Тип моделирования до
Дискретный. Установите время выборки на 100 мкс.
Запустите симуляцию.Обратите внимание, что время моделирования сокращено. Наблюдайте за симуляцией
Результаты: выходное напряжение выпрямителя и пульсации тока отсутствуют.
представлены только средние значения этих сигналов.если ты
позже попробуйте визуализировать входной ток, вы увидите только 60 Гц
фундаментальная составляющая детализированного тока.
.
10 шт. / Лот MX612 SOP 8, постоянный ток 1200 мА, пиковый ток 2,5 А, бесколлекторный двигатель постоянного тока IC на 100% хорош | драйвер двигателя постоянного тока | драйвер постоянного тока
О США
Мы обещаем:
1: Производство только лучших потребительских товаров и обеспечение высочайшего качества.
2: Быстро и точно доставляйте товары нашим клиентам по всему миру
Политика обслуживания клиентов
Мы более чем рады ответить на любые ваши вопросы, пожалуйста, свяжитесь с
1: Заказы обрабатываются своевременно после подтверждения оплаты.
2: Мы отправляем только по подтвержденным адресам заказа. Адрес вашего заказа ДОЛЖЕН СООТВЕТСТВОВАТЬ вашему адресу доставки.
3: Если вы не получили посылку в течение 30 дней с момента оплаты, свяжитесь с нами. Мы отследим доставку и свяжемся с вами в кратчайшие сроки. Нашей целью является удовлетворение клиента!
4: Из-за наличия на складе и разницы во времени мы выберем для быстрой доставки ваш товар с нашего первого доступного склада.
Наши преимущества
1: У нас все собственные складские запасы, с достаточным запасом
2: Качество продукта достигло серии сертификатов
3: Мы поддерживаем различные перевозки, Почтовые пакеты Гонконга и Китая, EMS.DHL, федеральные .UPS и TNT, могут полностью удовлетворить различные потребности покупателя.
Я твердо верю
Мы будем вашим лучшим партнером
Отзыв
Ваше удовлетворение и положительные отзывы очень важны для нас, пожалуйста, оставьте положительный отзыв и 5 звезд, если вы удовлетворены с нашими товарами и услугами.
Если у вас возникли проблемы с нашими товарами или услугами, пожалуйста, свяжитесь с нами, прежде чем оставлять отзыв. Мы сделаем все возможное, чтобы решить любую проблему и предоставить вам лучшее обслуживание клиентов.
.