
Руководство по выбору преобразователей частоты для различных применений
Руководство по выбору преобразователей частоты для различных применений
Электропривод и его – модернизация, оптимизация, повышение КПД, снижение энергопотребления (энергосбережение), все это требования современного производства, ведущие к снижению эксплуатационных затрат и улучшению экологического фона нашей планеты.
Основными устройствами, используемыми при модернизации электропривода переменного тока, являются преобразователи частоты, которые дают возможность плавного изменения частоты вращения электродвигателя с поддержанием необходимого момента на валу.
Итак, для правильного выбора преобразователя частоты под Вашу систему электропривода (применение) следует учитывать следующие факторы:
1. Тип применения
2. Требуемая перегрузочная способность преобразователя частоты
3. Требуемый диапазон регулирования и точность поддержания скорости приводного механизма
4. Функциональность преобразователя частоты
Функциональность преобразователя частоты
5. Номинальные данные подключаемого к преобразователю частоты двигателя
Рассмотрим каждый из этих пунктов подробнее.
1. Обобщенно, возможны три основных применения преобразователя частоты:
a.) Управление скоростью приводного механизма
Например – управление скоростью вращения двигателя насоса, конвейера, шпинделя станка и т.д.
Понятно, что это основное применение преобразователей частоты, изначально для этого они и создавались. За счет применения преобразователей частоты появилась возможность не только упростить кинематические схемы приводов с двигателями переменного тока, где требуется регулировать скорость вращения, но и существенно экономить электроэнергию. С примером эффективности внедрения преобразователей частоты для насосных агрегатов можно ознакомиться здесь. Любой преобразователь частоты может управлять скоростью вращения двигателя переменного тока (он должен соответствовать характеристикам двигателя).
b.) Управление моментом приводных механизмов.
Например — управление моментом двигателя намотчика/размотчика для поддержания заданного натяжения материала, применения с распределением нагрузки между несколькими приводными точками (с этим примером можно ознакомиться здесь).
Не все преобразователи частоты имеют данную функцию. Чтобы управлять моментом, преобразователь частоты должен иметь принцип векторного управления электродвигателем.
c.) Управление положением приводного механизма
Например — управление положением робота, осью станка и т.п.
В таких технологических установках применяются электродвигатели, оснащенные датчиками обратной связи по положению\скорости. Зачастую, здесь применяются специальные сервомоторы с постоянными магнитами, например, такие как Unimotor FM (производства Control Techniques).
Преобразователь частоты должен обладать функцией управления положением, причем, порт для подключения датчика обратной связи может быть как встроенным в основную плату управления, так подключаемым опционально. Задание положения для преобразователя может формироваться как его собственным контроллером по заданному алгоритму, так и внешними контроллерами (импульсными или аналоговыми сигналами, либо посредством передачи данных по промышленным сетям – Profibus DP, Ethernet, Modbus, Profinet и т.д.). Управление сервомотором с постоянными магнитами потребует от преобразователя частоты наличия соответствующего режима управления.
Задание положения для преобразователя может формироваться как его собственным контроллером по заданному алгоритму, так и внешними контроллерами (импульсными или аналоговыми сигналами, либо посредством передачи данных по промышленным сетям – Profibus DP, Ethernet, Modbus, Profinet и т.д.). Управление сервомотором с постоянными магнитами потребует от преобразователя частоты наличия соответствующего режима управления.
2. Требуемая перегрузочная способность зависит от типа приводного механизма, режимов его работы. Стандартно, преобразователи частоты имеют возможность 110% и 150% перегрузки в течение короткого времени (нескольких секунд или минут).
Для примера, к применениям, не требующим высокую перегрузочную способность можно отнести такие механизмы как:
— Вентиляторы
— Центробежный насос
— Поршневой насос
— Холодильный компрессор
— Винтовой компрессор
— Поршневой компрессор
— Конвейер, транспортер
— Смеситель
Механизмы, требующие высокую перегрузочную способность:
— Мельницы
— Дробилки
— Прессы
— Шредеры
— ПТО
-различные применения с задачами управления положением.
Преобразователи частоты для сервомоторов – сервоприводы, имеют высокую перегрузочную способность, в основном не менее 300% в течение минуты.
3. Ширина диапазона регулирования и точность поддержания скорости могут предъявить к преобразователю частоты дополнительные требования.
Как правило, эти параметры не учитываются для электродвигателей насосов, вентиляторов, где регулирование производится в достаточно узком диапазоне (35-50 Гц). Однако если говорить, например, про привод тележки для гидродинамических испытаний макетов судов, где требуется высокая точность поддержания скорости в диапазоне от 1-го об/мин до 1500 об/мин с, то нужно обратить внимание на соответствующие характеристику преобразователя частоты называемой – глубиной регулирования скорости.
Диапазон регулирования скорости определяется отношением максимальной скорости к минимальной при условии поддержания электродвигателем номинального момента.
Для преобразователей частоты с различным принципом управления двигателем диапазоны регулирования имеют примерно следующие значения:
-вольт-частотный (скалярный) режим — 1:20,
-векторное управление без датчика обратной связи – 1:100,
-векторное управление с датчиком обратной связи – 1:1000.
Что касается точности поддержания скорости, то значения имеют следующий вид:
-вольт-частотный (скалярный) режим +/- 25 об/мин,
-векторное управление без датчика обратной связи +/- 10 об/мин,
-векторное управление с датчиком обратной связи +/- 0,15 об/мин.
4. При выборе преобразователя частоты следует учитывать степень его защиты от окружающей среды, она может варьироваться от IP00 до IP66. Первая цифра означает уровень защиты от твердых веществ, вторая от жидкостей. Так же к дополнительному функционалу преобразователей частоты можно отнести следующее:
a.) Возможность подключения тормозного резистора.
Данная функция необходима для быстрого останова приводных механизмов с высокой инерционностью, например, центрифуг, манипуляторов и т.п. При торможении двигателя, последний переходит в генераторный режим и выделяемую им энергию нужно рассеивать в тепло, так как в противном случае может возникнуть аварийное отключения преобразователя частоты по перенапряжению на шине постоянного тока и выходу из строя мощных электролитических конденсаторов.
b.) Возможность рекуперации выделяемой двигателем энергии при его торможении в питающую сеть.
При останове высоко-инерционных механизмов, например, больших вентиляторов, маховиков и т.п., генерируемую двигателями энергию можно вернуть в сеть, что может привести к существенной экономии энергопотребления (необходимо делать расчет). Так же данную функцию целесообразно использовать в механизмах, где привод создает отрицательный вращающий момент (размотчики, стенды испытания двигателей под нагрузкой). Более подробно про рекуперацию энергии в сеть можно почитать здесь.
с.) Помимо электродвигателей, преобразователи частоты так же могут управлять вспомогательными механизмами, например, клапанами, сигнальной аппаратурой и т.д. Этого можно реализовать посредством встроенных в преобразователь частоты входов/выходов, так и посредством подключения к нему опциональных плат.
Преобразователи частоты можно оснащать различными опциями, например:
— Программируемый логический контроллер (PLC)
— Платы расширения аналоговых и дискретных входов/выходов
— Платы с сетевыми интерфейсами (Profibus, DeviceNet и т. д.)
д.)
5. Итак, после выбора модели преобразователя частоты, необходимо выбрать его
типоразмер под конкретный двигатель. Для этого необходимо ознакомиться с информацией на шильдике двигателя и определить его номинальное напряжение, номинальный ток, номинальную скорость вращения и КПД. Вся эта информация, как правило, потом заносится в программу настройки преобразователя.
Низковольтные преобразователи частоты могут иметь следующее напряжение питания:
~ 1ф. х 200-240 В
~ 3ф. х 200-240 В
~ 3ф. х 380-480 В
~ 3ф. х 500-690 В
С соответствующим значением номинального напряжения питания должен быть и сам подключаемый электродвигатель. Номинальный выходной ток преобразователя частоты должен быть не менее номинального тока электродвигателя с учетом перегрузочных способностей для данного применения, определяемых в соответствии с пунктом 2 данной статьи.
На современном рынке существует большое количество производителей выпускающих преобразователи частоты, однако, практика показывает, что самым беспроблемным вариантом является использование европейских или японских брендов, у которых хорошо развита техническая и сервисная поддержка на территории России. Таким примером могут быть фирмы Control Techniques (Англия), Vacon (Финляндия), Danfoss (Дания), Siemens (Германия), АВВ (Швеция), Mitsubishi (Япония), Omron-Yaskawa (Япония) и т.д.
Таким примером могут быть фирмы Control Techniques (Англия), Vacon (Финляндия), Danfoss (Дания), Siemens (Германия), АВВ (Швеция), Mitsubishi (Япония), Omron-Yaskawa (Япония) и т.д.
Для выбора преобразователя частоты под Ваше применение воспользуйтесь специальным КОНФИГУРАТОРОМ ЭЛЕКТРОПРИВОДА на нашем сайте или свяжитесь с нами по телефону (812) 635-9030, email: [email protected] .
СОВРЕМЕННЫЙ ЭЛЕКТРОПРИВОД – УНИВЕРСАЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ
В статье рассмотрены основные характеристики электропривода как средства управления различными типами электродвигателей, применяемых в промышленности. Автором приводятся краткий обзор основных производителей электроприводов.
Современная промышленность сегодня не может обойтись без широкого применения электроприводов в различных отраслях. Совершенствование и развитие электроприводов было обусловлено бурным развитием микроэлектроники и полупроводниковой техники в XX веке.
Со временем системы управления электроприводами стали более функциональными, надежными и быстродействующими, что в конце концов привело к созданию особого универсального комплектного электропривода, который может управлять различными типами электродвигателей.
Рассмотрим эти типы.
1. Двигатель постоянного тока, обладающий высокими регулировочными характеристиками и большими реализуемыми моментами на валу. В качестве минусов данного двигателя можно указать сложность конструкции электрической машины и ее низкую надежность в связи с наличием коллекторного узла. Также конструктивной особенностью данной машины является невозможность поддержания момента на нулевой скорости.
2. Асинхронный двигатель. Он обладает более низкими регулировочными характеристиками (без учета более продвинутой электроники), но зато имеет чрезвычайно простую конструкцию и очень высокую надежность вкупе с широчайшим диапазоном реализуемых мощностей. Также следует отметить, что диапазон регулирования и регулировочные характеристики можно существенно улучшить за счет применения цифровой микроэлектроники и продвинутой математики.
3. Синхронный двигатель. В частности в промышленности широко используются мощные синхронные машины для привода больших вентиляторов или насосов, а для низкого диапазона мощности используются синхронные машины с постоянными магнитами на роторе. Эти машины обладают широким регулировочным диапазоном, стабильной характеристикой и большим моментом на валу, но требуют для управления применения цифровой электроники и мощной математики. В качестве минусов данной машины требуется отметить сложность и невысокую надежность ее конструкции и высокую стоимость.
4. Линейный (прямой) привод предназначен для реализации поступательного движения непосредственно рабочим органом электрической машины. Такая машина применяется в специфичных областях промышленности (печать, управление клапанами, производство микроэлектронных компонентов). Данный тип двигателей сочетает высокую динамику и точность, но имеет небольшой диапазон реализуемых мощностей и сложную конструкцию. Однако стоит отметить, что количество применений прямого привода увеличивается с каждым годом.
Понятно, что такое разнообразие двигателей повлекло за собой и разнообразие систем управления ими (собственно электроприводов), обусловленное прежде всего различными математическими моделями электродвигателей. Развитие микроэлектроники и расширение функциональных возможностей электроприводов привело к созданию универсального электропривода, способного управлять различными типами электродвигателей. Соответственно, для этих задач наиболее подходили машины одного типа – машины переменного тока (асинхронные, синхронные и линейные).
Управление такими машинами реализуется с помощью одной и той же схемы. Переменное напряжение, поступающее из сети выпрямляется диодным мостом (звено выпрямителя) и поступает на несколько конденсаторов (звено постоянного тока), откуда в свою очередь через специальные биполярные транзисторы с изолированным затвором (IGBT-транзисторы) поступает на обмотки двигателя (звено инвертора). Чтобы в обмотках тек синусоидальный ток, необходимо с помощью периодического открытия-закрытия соответствующих транзисторов создать в обмотках переменное напряжение, среднее значение которого будет равно синусоидальному напряжению необходимой амплитуды. Это делается с помощью так называемого широто-импульсного модулирования (ШИМ), то есть модулирования импульсов напряжения переменной скважности.
Это делается с помощью так называемого широто-импульсного модулирования (ШИМ), то есть модулирования импульсов напряжения переменной скважности.
Использование специальной математической модели для реализации ШИМ позволяет реализовывать в каждой из обмоток двигателя необходимое напряжение и ток, что в свою очередь позволят значительно расширить регулировочный диапазон.
Рассмотрим некоторые важные характеристики электроприводов.
Регулировочный диапазон (диапазон регулирования, глубина регулирования) – это специальная величина, характеризующая минимальную частоту вращения вала электродвигателя, на которой не будет наблюдаться пульсаций частоты вращения ротора. Например, если диапазон регулирования 1:1000, то это означает, что для двигателя с номинальной частотой вращения 3000 об/мин при настройке контуров управления будет реализована минимальная частота вращения в 3 об/мин без пульсаций частоты вращения (без «дрожания» вала по частоте вращения). Также это значит, что при реализованной минимальной частоте вращения будет реализован номинальный момент на валу электродвигателя. Следует также отметить, что достижение еще более низких скоростей также возможно, однако в таком случае на валу двигателя будут наблюдаться пульсации скорости и момента. Еще одним важным положительным фактором цифрового управления является тот факт, что при его использовании возможна реализация нулевой частоты вращения с сохранением номинального момента на валу, что немаловажно для большинства современного оборудования.
Следует также отметить, что достижение еще более низких скоростей также возможно, однако в таком случае на валу двигателя будут наблюдаться пульсации скорости и момента. Еще одним важным положительным фактором цифрового управления является тот факт, что при его использовании возможна реализация нулевой частоты вращения с сохранением номинального момента на валу, что немаловажно для большинства современного оборудования.
Номинальная частота вращения, номинальный момент – величины, характеризующие какова будет частота вращения двигателя (без учета скольжения) и момент на валу при приложении к обмоткам номинального напряжения на номинальной частоте (обычно рассчитывается для напряжения 220/380 В в зависимости от двигателя и частоты 50 Гц).
Пиковый момент, время выдержки момента – величины, характеризующие перегрузочную способность электропривода. Обычно транзисторы звена инвертора выбираются с некоторым «запасом» по возможности пропускать через себя номинальный ток двигателя.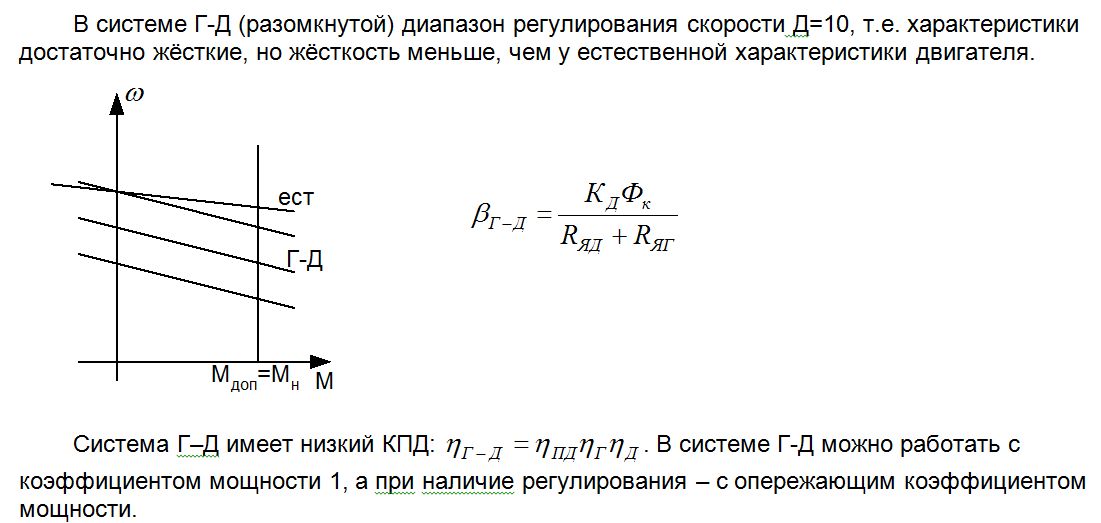 Таким образом, при протекании тока выше номинального (например, 120% от номинального) транзисторы будут сильнее перегреваться без ущерба для себя. Время этого «нештатного» режима работы регламентируется и контролируется системой управления, что позволяет в короткие моменты получать повышенный момент на валу двигателя без ущерба для всей системы в целом.
Таким образом, при протекании тока выше номинального (например, 120% от номинального) транзисторы будут сильнее перегреваться без ущерба для себя. Время этого «нештатного» режима работы регламентируется и контролируется системой управления, что позволяет в короткие моменты получать повышенный момент на валу двигателя без ущерба для всей системы в целом.
Управление – сводная характеристика, позволяющая показать, какими методами можно управлять представленным электроприводом. Чем больше возможностей управления есть у привода, тем более гибкую систему на его основе можно создать.
Поддерживаемые интерфейсы – графа, показывающая какими сетевыми возможностями обладает представленный электропривод.
Датчик положения – специальное устройство, позволяющее с высокой точностью определять положение вала двигателя с помощью аналогового сигнала или оптических меток. Следует отметить, что работа некоторых типов электроприводов принципиально не возможна без наличия датчика положения.
Разрешение энкодера – величина, характеризующая максимальное количество импульсов, которое возможно записать в регистры привода, без сброса счетчика (максимально возможное количество импульсов на оборот вала). Обычно сами датчики положения имеют значительно более низкое число импульсов на оборот, чем разрешающая способность счетчика.
Подключаемые модули – специальные модули привода, возможные для подключения. Зачастую, для специальных применений электропривода требуется дополнительная обработка входной и выходной информации, управление дополнительными устройствами или синхронизация с другими устройствами. В зависимости от необходимого применения выбирается специальный модуль, который выполнит требуемые действия (например, интерполяцию нескольких осей).
Класс защиты – степень защищенности электропривода от внешних воздействий (пылевых и водных). Рост цифр характеризует рост защищенности.
Рабочий диапазон температур – диапазон допустимых при работе электропривода и электродвигателя температур внешней среды.
В качестве вывода необходимо отметить, что современные электроприводы обладают дружественным интерфейсом пользователя, легко понятным и простым алгоритмом настройки параметров, легкостью в использовании, что при возможности подключения к одному приводу различных типов двигателя позволяет использовать эти устройства для построения различного рода систем с максимальной гибкостью и результативностью и минимальными затратами.
Все это относится к любому из представленных сегодня на рынке электроприводов – таких как Danfoss, Control Techniques, Schneider Electric (Altivar), Siemens и Omron-Yaskawa. Следует отметить, что представленные электропривода можно условно разделить на 2 группы – более дорогие с большей функциональностью и более дешевые с меньшим количеством функций. Как правило, основные производители стараются производить электропривода и в той, и в другой условной группе.
К первым можно смело отнести векторные привода Siemens, Omron-Yaskawa и некоторые модели Control Techniques и Danfoss. Данные привода обладают широким спектром применения (включая специальные), различными возможностями управления (как вольт-частотного, так и векторного управления), приемлемой достаточно высокой надежностью и рядом специальных опций. Минусом в данном случае является достаточно высокая цена.
Данные привода обладают широким спектром применения (включая специальные), различными возможностями управления (как вольт-частотного, так и векторного управления), приемлемой достаточно высокой надежностью и рядом специальных опций. Минусом в данном случае является достаточно высокая цена.
Во второй группе традиционно находятся электропривода, предназначенные только для вольт-частотного управления (управление насосами, вентиляторами, аэраторами и пр.), которые обладают пониженной функциональностью (меньшим количеством прикладных функций) и меньшей надежностью. Такие электропривода выпускаются практически всеми производителями, включая приведенных в данной статье, и обладают значительно более низкой ценой по отношению к векторным.
Особняком стоят специальные электропривода, предназначенные для управления прецизионными синхронными электродвигателями с постоянными магнитами на роторе, так называемые сервопривода. Цена на них резко отличается в большую сторону по сравнению с обозначенными ранее электроприводами, но в то же время сервопривода обладают повышенной точностью регулирования, как положения вала, так и частоты его вращения. Представлены эти устройства известными производителями, такими как Control Techniques, Siemens, Omron-Yaskawa.
Представлены эти устройства известными производителями, такими как Control Techniques, Siemens, Omron-Yaskawa.
Такое широкое разнообразие устройств порождает большое количество сервисных партнеров компаний-производителей, которые занимаются обслуживанием установленных и вышедших из строя электроприводов. Следует отметить, что большинство компаний занимается сервисной поддержкой только одного из производителей, что обусловлено недостатком на рынке труда квалифицированных специалистов.
Одним из крупнейших центров обслуживания приводной техники всех указанных в данной статье производителей электроприводов на Северо-Западе является Сервисный центр НПФ «Ракурс». Сервисный центр осуществляет проведение диагностики, экспертизы, гарантийный и постгарантийный ремонт, поставку запчастей и оборудования на замену, а также предоставляет консультационные услуги и осуществляет поддержку своих клиентов 24 часа в сутки 7 дней в неделю. В сервисном центре работает квалифицированная команда инженеров, имеющих многолетний опыт выполнения задач по данному профилю. В центре есть всё необходимое специализированное оборудование для диагностики и ремонта приводной техники, а также достаточно большой локальный склад запчастей.
В центре есть всё необходимое специализированное оборудование для диагностики и ремонта приводной техники, а также достаточно большой локальный склад запчастей.
Горбунов А.В., инженер отдела развития продукции
Редуктор давления Watts DRV 15 N диапазон регулирования 1,5-6 бар 1/2″
Описание «Редуктор давления Watts DRV 15 N диапазон регулирования 1,5-6 бар 1/2″» отсутствует
Технические характеристики
|
Общие |
|
|
Бренд |
Watts |
|
Тип арматуры |
Редуктор давления |
|
Гарантия |
2 года |
|
Страна производитель |
Германия |
|
Материал корпуса |
Латунь |
|
Технические характиристики |
|
|
Рабочая температура |
70 °C |
|
Рабочее давление |
25 бар |
|
Вид резьбы |
Наружная |
|
Диаметр резьбы |
1/2″ |
Доставка
|
По Москве в прeделах от МКАД до ТТК |
1000 руб |
|
За пределы МКАД |
1000 руб + 40 руб за 1 км от МКАД |
|
Заказ на сумму от 150 000 руб |
бесплатно |
|
САМОВЫВОЗ |
Самовывоз товара осуществляется по 50% предоплате из Лесного Городка. 
|
Оплата
|
Наличными водителю-экспедитору (предоставляются кассовый и товарный чеки) |
|
Оплата в офисе по картам Visa или Mastercard |
|
Безналичный расчет (предоставляются счет-договор на поставку товара, универсальный передаточный документ ) |
|
Для получения счета на оплату необходимы следующие реквизиты: Наименование юридического лица с указанием организационно-правовой формы, ИНН, КПП, адрес, расчетный счет, БИК, корреспондирующий счет. |
Ответим на все ваши вопросы и поможем с выбором
+7(495)-150-38-00
Заказ обратного звонка
Отзывы
Отзывов нет.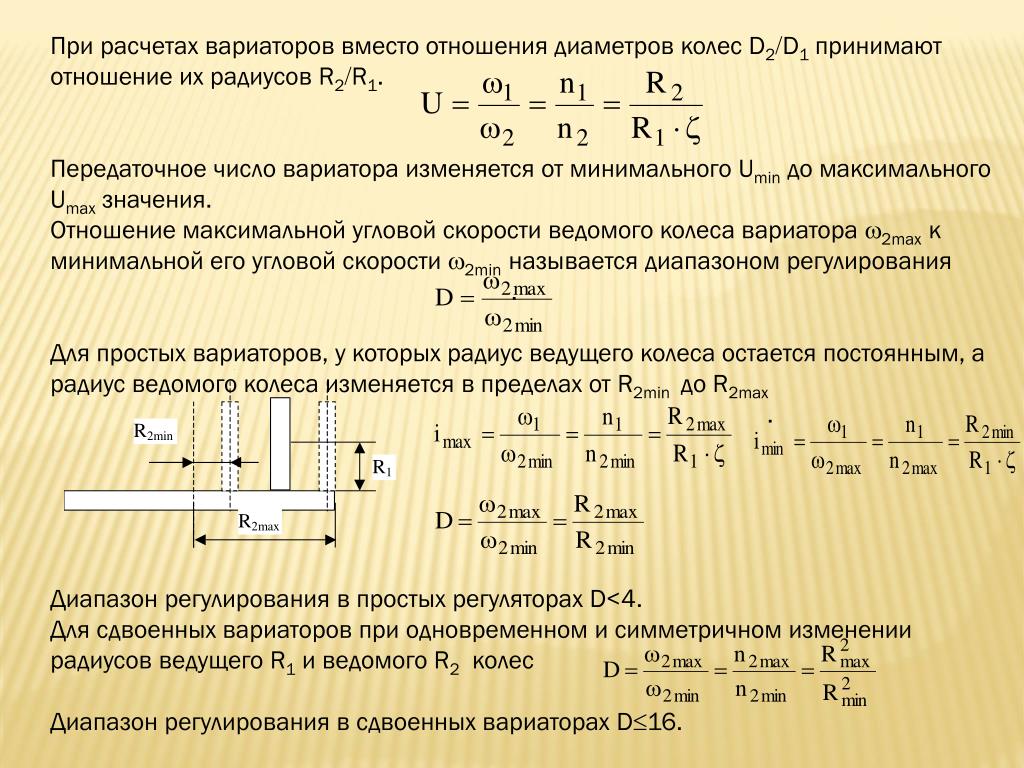 Вы можете оставить отзыв об этом товаре первым!
Вы можете оставить отзыв об этом товаре первым!
Добавить отзыв
Поделиться с друзьями:
Рекомендуем приобрести
Рекомендуем приобрести
Просмотренные товары
Регулирование уровня Байкала снова – предмет споров ученых с двух берегов озера. От «метрового диапазона» пора отказаться, и управлять озером в зависимости от гидрологической обстановки в конкретном сезоне.
В четвертый раз за все время непрерывных наблюдений, то есть с 1899 года (!), приток в озеро Байкал в сентябре 2020 года превысил 5200 кубометров в секунду. С 13 сентября уровень Байкала стабильно держится на отметках выше 457 метров в Тихоокеанской системе высот (ТО) – случилось это впервые за последние 22 года, и, понятно дело, сразу стало событием. И хотя действующее постановление правительства РФ №1667 от 27 декабря 2017 года разрешает Росводресурсам в годы высокой водности форсировать уровень до 457,85 метров ТО (в этом году не пригодится, уровень снижается), даже относительно скромное превышение 457-метровой планки обернулось волной возмущения со стороны ученых, чиновников и общественности Бурятии и примкнувших к ней эко-активистов. Но гораздо больше возмутившихся с восточного берега пугает возможный отказ от метрового диапазона регулирования, над чем думают в правительстве РФ, намучившись с управлением непокорным озером.
С 13 сентября уровень Байкала стабильно держится на отметках выше 457 метров в Тихоокеанской системе высот (ТО) – случилось это впервые за последние 22 года, и, понятно дело, сразу стало событием. И хотя действующее постановление правительства РФ №1667 от 27 декабря 2017 года разрешает Росводресурсам в годы высокой водности форсировать уровень до 457,85 метров ТО (в этом году не пригодится, уровень снижается), даже относительно скромное превышение 457-метровой планки обернулось волной возмущения со стороны ученых, чиновников и общественности Бурятии и примкнувших к ней эко-активистов. Но гораздо больше возмутившихся с восточного берега пугает возможный отказ от метрового диапазона регулирования, над чем думают в правительстве РФ, намучившись с управлением непокорным озером.
Уровень Байкала, как, наверное, многим известно, регулируется сбросами Иркутской ГЭС – для нее «священное море» является, по сути, естественным водохранилищем. Однако если подавляющая часть таких водоемов в России работают по Правилам использования водных ресурсов (т. н. ПИВРам), то регулирование Байкала с 2001 года ведется в рамках… правительственных постановлений! Самое первое, постановление №234 от 26 марта 2001 года, сразу же загнало озеро в искусственные рамки с абсурдно узким «метровым» диапазоном регулирования – между 456 и 457 метров ТО. Еще на стадии подготовки и согласования того документа эксперты подчеркивали: обеспечить прямое попадание в это прокрустово ложе можно будет только в нормальных условиях (при т.н. средней водности), но не в маловодные и уж тем более не в многоводные годы. За последнюю декаду все эти опасения подтвердились на практике.
н. ПИВРам), то регулирование Байкала с 2001 года ведется в рамках… правительственных постановлений! Самое первое, постановление №234 от 26 марта 2001 года, сразу же загнало озеро в искусственные рамки с абсурдно узким «метровым» диапазоном регулирования – между 456 и 457 метров ТО. Еще на стадии подготовки и согласования того документа эксперты подчеркивали: обеспечить прямое попадание в это прокрустово ложе можно будет только в нормальных условиях (при т.н. средней водности), но не в маловодные и уж тем более не в многоводные годы. За последнюю декаду все эти опасения подтвердились на практике.
Тем не менее, в течение по крайней мере 20 лет любой выход за пределы 456 или 457 метров ТО в кругах общественных «защитников Байкала», эко-активистов и чиновников в Бурятии, страдающих генетической обидой за строительство ГЭС именно в Иркутской области (хотя водосборный бассейн озера географически большей частью расположен на территории республики и соседней Монголии), считается преступлением против Природы и Человечества. Направленным, естественно, на убийство Байкала. Научные факты при этом начисто отвергаются, поскольку явно ломают эту простую картину мира. Между тем и до строительства Иркутской ГЭС уровень Байкала не умещался в рамках метрового диапазона, опускаясь в 1904 году до исторического минимума – 454,93 метров и повышаясь до отметки 457,10 метров в 1869 году. То есть и в естественных условиях амплитуда колебания уровня воды в Байкале составляла 2,18 метров. После ввода в эксплуатацию иркутского гидроузла на Ангаре, единственной вытекающей из Байкала реки, уровень озера был поднят в среднем на 80 сантиметров. И с тех пор, вплоть до 2001 года, 17 раз превышал отметку 457 метров и 18 раз опускался ниже отметки 456 метров, а максимальная амплитуда колебаний составила 2,15 метра. В зарегулированных условиях (с 1960 года) минимальная отметка была зарегистрирована в 1982 года – 455,27 метров ТО, максимальная – в 1988-м, 457,42 метров ТО.
Направленным, естественно, на убийство Байкала. Научные факты при этом начисто отвергаются, поскольку явно ломают эту простую картину мира. Между тем и до строительства Иркутской ГЭС уровень Байкала не умещался в рамках метрового диапазона, опускаясь в 1904 году до исторического минимума – 454,93 метров и повышаясь до отметки 457,10 метров в 1869 году. То есть и в естественных условиях амплитуда колебания уровня воды в Байкале составляла 2,18 метров. После ввода в эксплуатацию иркутского гидроузла на Ангаре, единственной вытекающей из Байкала реки, уровень озера был поднят в среднем на 80 сантиметров. И с тех пор, вплоть до 2001 года, 17 раз превышал отметку 457 метров и 18 раз опускался ниже отметки 456 метров, а максимальная амплитуда колебаний составила 2,15 метра. В зарегулированных условиях (с 1960 года) минимальная отметка была зарегистрирована в 1982 года – 455,27 метров ТО, максимальная – в 1988-м, 457,42 метров ТО.
Эти известные специалистам факты, казалось бы, должны доказать, что в природе бывает всякое, и даже без вмешательства человека водоемы могут буйствовать и выходить из берегов, оказывая не самое позитивное воздействие на дельты рек, затапливать острова, размывая песчаные косы и прибрежные зоны.
В ходе экстремального маловодья 2014-2017 годов – рекордного с начала эксплуатации Иркутского гидроузла и второго по глубине за весь период наблюдений, после маловодья 1903 года – уровень озера тоже опускался ниже 456 метров ТО четыре года подряд (с минимумом 455,70 метров ТО на 28 апреля 2016 года). И это несмотря на то, что с октября 2014 года по октябрь 2018 года расходы воды через Иркутскую ГЭС держались на минимально допустимом уровне 1300 (1250) кубометров в секунду – так долго в подобных режимах гидроузел не работал никогда до этого! Чтобы «управлять» уровнем Байкала в сложившихся в те годы гидрологических условиях, правительство России вынуждено было ежегодно штамповать временные постановления, которыми действие постановления №234 приостанавливалось. В последний раз это было сделано 27 декабря 2017 года, причем сразу сроком до 1 января 2021 года.
На протяжении четырех лет, того самого маловодья 2014-2017 годов, не проходило и недели без публикаций в СМИ с устрашающими заголовками вроде «Байкал катастрофически обмелел» или «Энергетики слили Байкал». Когда водность в озере нормализовалась, истерики сразу прекратились. В этом сезоне «защитникам Байкала» пришлось переобуваться в воздухе, поскольку уровень стремительно рос. И стало очевидно, что планка в 457 метров ТО обязательно будут превышена. По оценкам лаборатории гидроэнергетических и водохозяйственных систем (ЛГВС) Института систем энергетики им. Л.А. Мелентьева СО РАН, причины такого развития событий были следующие. Во-первых, Росгидромет явно ошибся в прогнозах приточности (на которые ориентируются в Росводресурсах), особенно на август-сентябрь. Во-вторых, заниженные расходы через Иркутскую ГЭС в зимне-весенний период 2019-2020 годов не обеспечили предусмотренную ПИВР предполоводную сработку водохранилища – на 1 мая его уровень нужно было «опустить» до 456,15 метров ТО, а получилось дойти только до 456,18 метров ТО или на 3 см выше.
Когда водность в озере нормализовалась, истерики сразу прекратились. В этом сезоне «защитникам Байкала» пришлось переобуваться в воздухе, поскольку уровень стремительно рос. И стало очевидно, что планка в 457 метров ТО обязательно будут превышена. По оценкам лаборатории гидроэнергетических и водохозяйственных систем (ЛГВС) Института систем энергетики им. Л.А. Мелентьева СО РАН, причины такого развития событий были следующие. Во-первых, Росгидромет явно ошибся в прогнозах приточности (на которые ориентируются в Росводресурсах), особенно на август-сентябрь. Во-вторых, заниженные расходы через Иркутскую ГЭС в зимне-весенний период 2019-2020 годов не обеспечили предусмотренную ПИВР предполоводную сработку водохранилища – на 1 мая его уровень нужно было «опустить» до 456,15 метров ТО, а получилось дойти только до 456,18 метров ТО или на 3 см выше.
Но главное, в-третьих, хотя приток второго квартала в среднем был близким к норме, «в зимне-весенний период 2020 года наблюдались повышенные притоки относительно нормы и прогноза УГМС… А в третьем квартале 2020 года (особенно в августе, сентябре) отмечался экстремально высокий приток в озеро Байкал с обеспеченностью 15 и 4% для августа и сентября соответственно, значительно превышающий прогнозы УГМС». Упомянутый в этом отрывке «экстремально высокий приток в Байкал» — это 4100 кубометров в секунду в июне, 3530 – в июле, 5180 – в августе и 5200 – в сентябре. В итоге, считают ученые, и «сложилась ситуация неизбежного превышения уровня озера Байкал выше отметки 457 метров ТО».
Упомянутый в этом отрывке «экстремально высокий приток в Байкал» — это 4100 кубометров в секунду в июне, 3530 – в июле, 5180 – в августе и 5200 – в сентябре. В итоге, считают ученые, и «сложилась ситуация неизбежного превышения уровня озера Байкал выше отметки 457 метров ТО».
«Сложившаяся экстремально высокая водность в сентябре определилась не только показателями поверхностного притока, но, в значительной степени, интенсивными осадками на поверхность озера, которые сложно учесть, так как они не измеряются. Между тем при пониженной водности в июле месяце прогнозисты УГМС, возможно, ожидали ее продолжения в последующем периоде с большей вероятностью, чем резкое увеличение. Это, по-видимому, привело к ошибочному прогнозу на август месяц. Прогноз на сентябрь уже соответствовал ожиданию высокой водности, но исправить ситуацию было уже невозможно», — отметил в комментарии для «Кислород.ЛАЙФ» заведующий ЛГВС, д.т.н. Вячеслав Никитин.
Росводресурсы, конечно, попытались обуздать природную стихию доступными регулятору средствами. С 9 сентября, при отметке тогда в 456,96 метров ТО, расходы Иркутской ГЭС были резко увеличены – до 2700 кубометров в секунду. А с 30 сентября сбросы выросли и до 2800 кубометров в секунду. Но, как отметил Никитин, даже если бы расходы ГЭС с первых дней сентября составили максимально теоретически возможные 4400-4500 кубометров в секунду (по условию максимальной пропускной способности истока Ангары), уровень озера все равно бы превысил бы отметку 457 метров, причем как минимум на 4-6 см. Но при этом регулятору пришлось бы пойти на нарушение правил эксплуатации Иркутской ГЭС, а городским территориям в нижнем бьефе станции был нанесен существенный ущерб.
С 9 сентября, при отметке тогда в 456,96 метров ТО, расходы Иркутской ГЭС были резко увеличены – до 2700 кубометров в секунду. А с 30 сентября сбросы выросли и до 2800 кубометров в секунду. Но, как отметил Никитин, даже если бы расходы ГЭС с первых дней сентября составили максимально теоретически возможные 4400-4500 кубометров в секунду (по условию максимальной пропускной способности истока Ангары), уровень озера все равно бы превысил бы отметку 457 метров, причем как минимум на 4-6 см. Но при этом регулятору пришлось бы пойти на нарушение правил эксплуатации Иркутской ГЭС, а городским территориям в нижнем бьефе станции был нанесен существенный ущерб.
Интересно, что сохранение расходов на уровне 2350 кубометров в секунду в течение всего сентября увеличило бы прирост уровня озера к 1 октября не более, чем на 2-3 см относительно фактического (457,12 метров ТО на ту же дату). «В этой связи стало очевидно, что увеличение расходов Иркутской ГЭС в октябре не имеет смысла, — отмечает Никитин. – В целом годовой гидрограф притока воды в озеро в 2020 года является уникальным и не имеет близких годов-аналогов».
– В целом годовой гидрограф притока воды в озеро в 2020 года является уникальным и не имеет близких годов-аналогов».
Годовой гидрограф притока воды в Озеро Байкал в 2020 года является уникальным и не имеет близких годов-аналогов.
В Бурятии считают, что выход Байкала за пределы 457 метров ТО связан не только с повышенной водностью притоков озера Байкал, но и с недостаточным по объемам водосбросом Иркутской ГЭС. В открытом письме группы ученых, среди которых первыми свои подписи поставили научный руководитель Байкальского института природопользования СО РАН, академик РАН Арнольд Тулохонов и врио директора БИП, член-корреспондент РАН Ендон Гармаев, сказано прямо: в сложившейся ситуации Иркутское водохранилище необходимо срабатывать с расходами до 6000 кубометров в секунду. Что, хоть и прописано в действующих ПИВР от 1988 года, как уже было сказано выше – технически невозможно. Несмотря на то что бурятским ученым это хорошо известно, они, ничтоже сумняшеся, на голубом глазу пишут: то, что такие расходы не назначаются, объясняется «риском затопления пойменной части реки Ангары, прежде всего, в черте Иркутска». Их не устраивает, что ради того, чтобы избежать затопления в нижнем бьефе Иркутского гидроузла в многоводные годы, приходится затапливать низкорасположенные территории на восточном побережье озера.
Их не устраивает, что ради того, чтобы избежать затопления в нижнем бьефе Иркутского гидроузла в многоводные годы, приходится затапливать низкорасположенные территории на восточном побережье озера.
Председатель комиссии по развитию территорий, экологии и природных ресурсов Общественной палаты Республики Бурятия Евгений Кислов в своем интервью недавно живописал апокалипсис в республике, причем при любом развитии событий. При понижении уровня – «…уход воды, засыхание сельхозугодий, исчезновение воды в колодцах и скважинах, еще более серьезные торфяные пожары, перерастающие в лесные, обнажение соров в Байкальске, где нагуливается молодь практически всех видов рыб». При повышении – «…затопление сельхозугодий, населенных пунктов, автомобильных и железных дорог. Не стоит забывать и о том, что в случае затопления под размыв попадают и кладбища в селах, например, в селе Клюевка кладбище в 50 метров от берега Байкала по горизонтали». При этом на очевидные вопросы Кислов ответов не дает, и даже сами вопросы не озвучивает. А кто, например, допустил строительство населенных пунктов, дорог и кладбищ в зоне возможного затопления? Почему в XXI веке население Бурятии пользуется водой из колодцев? Почему автомобильные и железные дороги не имеют защитных сооружений? Почему в Иркутске ущерб посчитан до последнего сарая и страдают от подтоплений только единичные сооружения на островах, а в Бурятии упоминаются абстрактные «десятки тысяч жителей прибрежных районов»?
А кто, например, допустил строительство населенных пунктов, дорог и кладбищ в зоне возможного затопления? Почему в XXI веке население Бурятии пользуется водой из колодцев? Почему автомобильные и железные дороги не имеют защитных сооружений? Почему в Иркутске ущерб посчитан до последнего сарая и страдают от подтоплений только единичные сооружения на островах, а в Бурятии упоминаются абстрактные «десятки тысяч жителей прибрежных районов»?
В письме Тулохонова и Ко тоже хватает красочных описаний грядущей экологической катастрофы. Впервые в новейшей истории, пишут Тулохонов и Ко, из-за превышения 457-ой отметки, соединились воды Баргузинского и Чивыркуйского заливов и на Байкале появился новый географический объект – остров Святой Нос (бывший всегда полуостровом). Из-за этого неизбежны «коренные изменения в экосистемах уникальных объектов Среднего Байкала и озера Арангатуй, расположенного на перешейке, где обитают наиболее ценные и, в том числе, краснокнижные водные и околоводные байкальские животные и растения». Еще более катастрофическая ситуация складывается в Северном Прибайкалье, «где происходит интенсивный размыв островов Ярки, разделяющих экосистемы северной части озера и дельтовые части рек Кичера и Верхняя Ангара». «Конечным результатом этого процесса станет в ближайшее время полное разрушение этой песчаной гряды и вторжение холодных байкальских вод в водно-болотные угодья Верхне-Ангарского заказника», «с полным уничтожением уникальной экосистемы низовьев Верхней Ангары и Кичеры, в том числе, мест обитания северо-байкальского омуля и других ценных пород рыбы».
Еще более катастрофическая ситуация складывается в Северном Прибайкалье, «где происходит интенсивный размыв островов Ярки, разделяющих экосистемы северной части озера и дельтовые части рек Кичера и Верхняя Ангара». «Конечным результатом этого процесса станет в ближайшее время полное разрушение этой песчаной гряды и вторжение холодных байкальских вод в водно-болотные угодья Верхне-Ангарского заказника», «с полным уничтожением уникальной экосистемы низовьев Верхней Ангары и Кичеры, в том числе, мест обитания северо-байкальского омуля и других ценных пород рыбы».
Подтопило в этом году и около четверти площади территории дельты реки Селенги (объекта Рамсарской конвенции по водно-болотным угодьям), включая места остановок перелетных птиц в Кабанском заказнике. «Практически полностью оказались затопленными основные места обитания и нерестилищ околоводных птиц и ондатры, изменились контуры проток и время прохода в Селенгу нерестового омуля. Данная ситуация после зимнего промерзания грозит катастрофическими последствиями для всей придельтовой фауны», — пишут бурятские ученые.
Они уверены, что все идет по более негативному сценарию, чем было в середине 1990-х – тогда, напоминают Тулохонов и Ко, из-за форсировок Байкала тоже были разрушены береговые линии низменного восточного побережья (прибрежных лесов, зон отдыха, пляжей и береговых сооружений) и «нанесен повсеместный экологический ущерб всему природно-биологическому комплексу озерной системы»: «Возникает реальная угроза разрушения автомобильных дорог на участке Горевой утес – Усть-Баргузин и железной дороги на перегоне Мысовая – Байкальск. Возможно повторение ситуации многоводья 1971 и 1973 годов, когда после повреждения железной дороги перевозка пассажиров на этих участках осуществлялась на паромных средствах».
Ученых также беспокоит, что «при существующем режиме эксплуатации Иркутской ГЭС за зимний период будет сработано не более 70 см уровня водного зеркала и к началу наполнения в весенне-летний сезон озеро войдет с небывало высоким уровнем, близким к отметке 456,40 метров. В этом случае, даже при средней водности уровень озера к осени 2021 года значительно превысит верхнюю предельную отметку и при сценарии приточности водной массы в приемный водоем этого года составит 457,35 метров ТО со всеми вытекающими последствиями».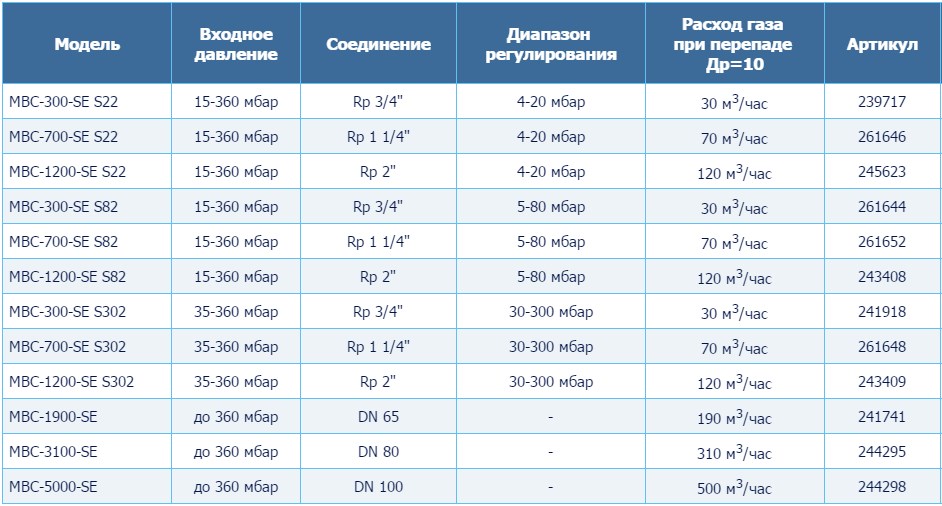
Неподготовленный читатель этой филиппикой явно будет фрустрирован, и поверит, что такими темпами земля скоро неизбежно налетит на небесную ось. А там, того и глядишь, наступит и конец света. Но как же бурятская наука предлагает защитить Байкал от подобного развития события? А никак. В письме нет ни одного слова «предлагаем», при этом главной защитной мерой названо сохранение «метрового диапазона». Росводресурсы уже внесло в правительство РФ проект нового постановления, которое смогло бы заменить постановление №234 на постоянной основе. Документ по содержанию повторяет постановление №1667 и предусматривает 2,31-метровый диапазон регулирования уровня Байкала, в зависимости от сложившихся условий водности (средней, низкой или высокой). Бурятские ученые считают недопустимым максимумом планку в 457,85 метров ТО, возможную для форсировок в годы большой воды, потому что… «уровень воды в Байкале никогда (ни в естественном цикле, ни в зарегулированном) не поднимался до этой отметки».
По мнению авторов и подписантов, если правительство РФ не вернется к магической математике из постановления №234, Байкал «в ближайшее время» утратит уникальное биоразнообразие, и подвергнется существенным морфометрическим изменениям, что неизбежно приведет к потере озером статуса Участка Всемирного природного наследия ЮНЕСКО и перевода его в статус «Объект Всемирного наследия в опасности». А Минприроды РФ своими действиями, пишут академик Тулохонов сотоварищи, «создает прецедент для нового обсуждения темы строительства ГЭС и зарегулированию стока на монгольской части бассейна реки Селенги». Напомним, Монголия свои проекты ГЭС в верховьях Селенги ранее пыталась позиционировать как средство защиты от затоплений восточного побережья Байкала. В последние годы эта тема в соседней стране затихла, но вот, уверены в Бурятии, теперь может и возникнуть вновь.
Точку в этом споре поставит, разумеется, правительство РФ, у которого на выбор есть два варианта действий: либо продлить действие постановления №1667 и сохранить в принципе достаточно широкий диапазон регулирования уровня Байкала, либо же ничего не делать и тем самым вернуться в начало 2021 года (это произойдет автоматически) к постановлению №234. Научный совет СО РАН по проблемам озера Байкал обсуждал, в том числе, и эту тему на заседании 16 октября, но к единой позиции приблизиться не смог – слишком уж непримиримыми оказались позиции иркутских и бурятских ученых. На выработку взвешенного решения в новосибирском Академгородке взяли тайм-аут в две недели.
Научный совет СО РАН по проблемам озера Байкал обсуждал, в том числе, и эту тему на заседании 16 октября, но к единой позиции приблизиться не смог – слишком уж непримиримыми оказались позиции иркутских и бурятских ученых. На выработку взвешенного решения в новосибирском Академгородке взяли тайм-аут в две недели.
Правительство Иркутской области, по опубликованным в СМИ словам губернатора региона Игоря Кобзева и председателя правительства Константина Зайцева, готово к любому развитию событий: заранее понятно, что при расходах 2800 ничего страшного в нижнем бьефе и так не случилось, к настоящему моменту оказались подтопленными восемь жилых деревянных строений с приусадебными участками в СНТ «Елизовское» (о. Елизовский), производственные помещения форелевого и осетрового хозяйства на острове Бабр, а также участки на нижней набережной Иркутска и на острове Юность (в парке отдыха). Известно, что при расходах 3200 (что было в 2008 году, но пока не планируется) будет затоплен дачный поселок на полуострове Кирова – неприятно, но не критично.
«Опыт регулирования уровенного режима озера Байкал как в условиях маловодного периода 2014-2017 годов, так и в условиях повышенной водности 2020 года наглядно, на практике, показал необоснованность и несостоятельность установления жесткого метрового диапазона регулирования уровня озера, предусмотренного постановлением №234. Метровый диапазон может быть выполнен только в условиях средней и близкой к ней водности, наблюдаемой, например, в период 1996-2013 годов. В 30-35% лет его невозможно выполнить в принципе (в многоводные годы) или без значительных ущербов (в маловодные годы)», — подчеркивает Вячеслав Никитин.
Реальный диапазон колебаний уровня Байкала в условиях экстремальной водности составит минимум 1,72 метров. При этом отметка 457 метров ТО будет превышена в 28 годах из 120; требования водного транспорта в нижнем бьефе Иркутской ГЭС можно будет обеспечить только в семи годах из 10 (по действующему законодательству, минимум обеспеченности – 85%), а требования водозаборов – на 93% (минимально допустимо 95%). В шести из каждых 10 лет над Иркутском и другими районами, расположенными в нижнем бьефе, также будет висеть угроза подтоплений.
В шести из каждых 10 лет над Иркутском и другими районами, расположенными в нижнем бьефе, также будет висеть угроза подтоплений.
Поэтому правительство Иркутской области поддерживает либо продление действия постановления №1667, либо выпуск нового аналогичного постановления – но предлагает сделать это на основе «научно-обоснованного допустимого диапазона регулирования уровня». Исследования по поиску этого «золотого ключика» могли бы быть выполнены с участием специалистов двух прибайкальских регионов, с их последующим обсуждением с заинтересованными федеральными и региональными ведомствами и общественными организациями, а также независимыми экспертами.
Иркутские ученые, которые озвучивали свою позицию много раз, предлагают продлить срок действия постановления №1667, но доработать его с учетом опыта, полученного как в маловодные годы, так и в 2020 году. «Это касается, прежде всего, уточнения понятий «средней, малой и большой водности», создающих правовую и практическую неопределенность при выполнении постановления №1667. Эти понятия относятся к среднегодовым показателям водности, которые становятся известны только после окончания календарного года, в то время как ключевые решения по назначению режимов регулирования уровня регулятору необходимо принимать уже в июле и августе, то есть почти за полгода до определения показателя среднегодовой водности. Возможно, следует учитывать показатели водности третьего квартала, в том числе по месяцам», — говорит Вячеслав Никитин.
Эти понятия относятся к среднегодовым показателям водности, которые становятся известны только после окончания календарного года, в то время как ключевые решения по назначению режимов регулирования уровня регулятору необходимо принимать уже в июле и августе, то есть почти за полгода до определения показателя среднегодовой водности. Возможно, следует учитывать показатели водности третьего квартала, в том числе по месяцам», — говорит Вячеслав Никитин.
В правительства Бурятии ранее заявляли, что намерены «поддержать предложение Федерального агентства водных ресурсов по сохранению предельного уровня воды в Байкале на отметке 457 метров ТО». Однако пресс-релиз, распространенный ФАВР еще 21 сентября, не содержит однозначной поддержки метрового диапазона. Напротив, в нем сказано: «Действующее постановление правительства России №1667… позволяет сдерживать высокий приток в многоводный период до отметки 457,85 метров (форсированный подпорный уровень). Эта отметка учитывает вероятность наступления опасных природных явлений редкой вероятности – 0,01%, такие риски и запас прочности закладываются при строительстве водохранилища».
Очевидно одно: действующие ПИВР, которым исполнилось уже 32 года, едва ли соответствуют современной ситуации, поскольку не учитывают опыт и научные знания, накопленные за период эксплуатации Иркутской ГЭС. Держаться за «метровый диапазон» в этой ситуации – поведение вряд ли разумное. Совместный труд ученых с двух берегов Байкала мог бы оказаться весьма эффективным и комплексным. Но свести их воедино способно только правительство РФ. Раз уж оно управляет Байкалом, то все в его руках.
Исследование преобразователей частоты. Основные сведения
Страница 2 из 3
Частотный преобразователь — это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный и инвертора (преобразователя), преобразующего постоянный ток в переменный требуемых частоты и амплитуды.
Выходные тиристоры GTO — запираемые тиристоры, полностью управляемые полупроводниковые приборы, в основе которых классическая четырёхслойная структура, они включают и выключают его подачей положительного и отрицательного импульсов тока на электрод управления.
Транзисторы IGBT — биполярные транзисторы с изолированным затвором (их входные характеристики подобны входным характеристикам полевого транзистора, а выходные – выходным характеристикам биполярного) обеспечивают необходимый ток для питания электродвигателя.
Для улучшения формы выходного напряжения между преобразователем и двигателем иногда ставят дроссель, а для уменьшения электромагнитных помех — EMC-фильтр [1].
Особый экономический эффект от использования ЧП дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. Самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, альтернативой может стать частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора, в нашем случае дверей Метрополитена.
Назначение ЧП — регулирование скорости вращения асинхронного электродвигателя частотным преобразователем производится путем изменения частоты и величины напряжения питания двигателя. КПД такого преобразования составляет около 98 %, из сети потребляется практически только активная составляющая тока нагрузки, микропроцессорная система управления обеспечивает высокое качество управления электродвигателем и контролирует множество его параметров, предотвращая возможность развития аварийных ситуаций.
КПД такого преобразования составляет около 98 %, из сети потребляется практически только активная составляющая тока нагрузки, микропроцессорная система управления обеспечивает высокое качество управления электродвигателем и контролирует множество его параметров, предотвращая возможность развития аварийных ситуаций.
Управление частотным преобразователем
Для управления частотными преобразователями используются следующие алгоритмы управления:
— Частотный алгоритм управлениярекомендуется применять в случаях, когда зависимость момента нагрузки двигателя известна, и нагрузка практически не меняется при одном и том же значении частоты, а также нижняя граница регулирования частоты не ниже 5…10 Гц при независимом от частоты моменте. При работе на центробежный насос или вентилятор (это типичные нагрузки с моментом, зависящим от скорости вращения) диапазон регулирования частоты – от 5 до 50 Гц и выше. При работе с двумя и более двигателями.
— Частотный алгоритм управления с обратной связью по скорости рекомендуется применять для прецизионного регулирования (необходимо использовать инкрементальный энкодер) с известной зависимостью момента от скорости вращения.
— Векторный алгоритм управления — этот алгоритм рекомендуется применять для случаев, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте. То есть, нет четкой зависимости между моментом нагрузки и скоростью вращения. Кроме того, этот алгоритм эффективен, когда необходимо получить расширенный диапазон регулирования частоты при номинальных моментах, например, 0…50 Гц для момента 100 % или даже кратковременно 150–200 % от номинального момента. Векторный метод управления частотным преобразователем реализуется путем сложных расчетов в реальном времени, производимых процессором преобразователя на основе информации о выходном токе, частоте и напряжении. Процессором используется также информация о паспортных характеристиках двигателя, которые вводит пользователь. Время реакции преобразователя на изменение выходного тока (момента нагрузки) составляет 50…200 мсек. Векторный метод позволяет минимизировать реактивный ток двигателя при уменьшении нагрузки путем адекватного снижения напряжения на двигателе. Если нагрузка на валу двигателя увеличивается, то преобразователь адекватно увеличивает напряжение на двигателе.
Время реакции преобразователя на изменение выходного тока (момента нагрузки) составляет 50…200 мсек. Векторный метод позволяет минимизировать реактивный ток двигателя при уменьшении нагрузки путем адекватного снижения напряжения на двигателе. Если нагрузка на валу двигателя увеличивается, то преобразователь адекватно увеличивает напряжение на двигателе.
— Векторный алгоритм управления с обратной связью по скоростирекомендуется применять для прецизионного регулирования (необходимо использовать инкрементальный энкодер) скорости, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т. е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходим максимальный диапазон регулирования частоты [2].
Диапазон регулирования скорости — Энциклопедия по машиностроению XXL
Потоки направлены в разные стороны, и обычно Фд несколько больше, так как в установившемся режиме электрод подается в зону сварки по мере его плавления. При отклонении напряжения f/д Б ту или иную сторону соответственно изменяется поток Фд, вызывая торможение или ускорение вращения электродвигателя для восстановления режима. Резистор Rq слу/кит для расширении диапазона регулирования. Скорость сварки в автоматах АДС в процессе сварки не регулируется и остается постоянной.
[c.147]
При отклонении напряжения f/д Б ту или иную сторону соответственно изменяется поток Фд, вызывая торможение или ускорение вращения электродвигателя для восстановления режима. Резистор Rq слу/кит для расширении диапазона регулирования. Скорость сварки в автоматах АДС в процессе сварки не регулируется и остается постоянной.
[c.147]
Большинство современных машин создается по схеме двигатель — передача — рабочий орган машины (рис. 3.54). Все двигатели для уменьшения массы, габаритов и стоимости выполняют быстроходными с узким диапазоном регулирования скоростей. Непосредственное соединение двигателя с рабочим органом машины
[c.300]
Очевидно, что первый способ регулирования менее экономичный, чем второй, так как при этом способе ухудшается общий к. п. д. гидропривода за счет уменьшения объемного к. п. д. Однако второй способ требует более сложного, а следовательно, и более дорогостоящего оборудования — регулируемого насоса или гидродвигателя. Кроме того, при очень малом д или скорость выходного звена получается неравномерной. Поэтому существует предельный диапазон регулирования. При изменении д диапазон регулирования скорости вращения составляет 1 500, при изменении д — 1 3. При одновременном регулировании насоса и гидромотора — 1 1500. В практике обычно диапазон регулирования не превышает 1 1000.
[c.216]
Кроме того, при очень малом д или скорость выходного звена получается неравномерной. Поэтому существует предельный диапазон регулирования. При изменении д диапазон регулирования скорости вращения составляет 1 500, при изменении д — 1 3. При одновременном регулировании насоса и гидромотора — 1 1500. В практике обычно диапазон регулирования не превышает 1 1000.
[c.216]
Плавное нагружение с нужной скоростью обеспечивается в приборе электроприводом. Шток, который управляет движением внутренней следящей рамки, соединен с рычажной системой 27. Последняя связана с поступательно перемещающейся от электродвигателя через редуктор с винтовой парой вилкой 28. Изменением числа оборотов двигателя и плеч рычажной системы с помощью винтового устройства 29 достигается широкий диапазон регулирования скорости нагружения 0,0002—0,02 м/с, что необходимо при исследовании широкого класса материалов с различными свойствами. Нужная величина перемещения штока устанавливается путем регулирования микрометрического устройства 25, установленного на кронштейне прибора и воздействующего на микровыключатели, укрепленные на рычажной системе и связанные электрически с системой питания двигателя. [c.68]
[c.68]
Передача электроэнергии постоянным током — не новая идея более того, первые передачи электроэнергии происходили на постоянном токе. До изобретения трансформаторов, синхронных генераторов и электродвигателей переменного тока потребление электроэнергии для нужд промышленности и транспорта шло на постоянном токе. С увеличением масштабов производства и потребления электроэнергии, расширением сферы ее использования в различных отраслях народного хозяйства постоянный ток в силу присущих ему особенностей не мог обеспечить выдвигаемые требования. Удельный вес постоянного тока в потреблении (электролиз, электрохимия, двигатели с широким диапазоном регулирования скорости и т. п.) составляет примерно одну пятую в общем энергобалансе. [c.239]
Для получения переменной частоты тока, питающего двигатель толкателя, можно использовать в качестве датчика частоты специальный маломощный электродвигатель с контактными кольцами, соответственно подобранный к двигателю толкателя. С помощью этого датчика, приводимого во вращение главным двигателем посредством замедляющей зубчатой или клиноременной передачи, можно значительно расширить или сузить диапазон регулирования скоростей [124]. На фиг. 220, б приведена зависимость числа оборотов двигателя толкателя п ., результирующей замыкающей силы —Рз, усилия толкателя Р ., а также напряжения тока ротора датчика частоты V в зависимости от числа оборотов датчика частоты п . По графику видно, что с увеличением напряжение тока датчика частоты уменьшается и соответственно уменьшается подъемная сила толкателя Р .. До тех пор, пока Ру. больше усилия замыкания Р , соответствующего тормозному моменту, способному удержать груз на весу (до точки а по фиг. 219, б), тормоз будет разомкнут. С увеличением и соответственным уменьшением Ру возрастает результирующее
[c.337]
С помощью этого датчика, приводимого во вращение главным двигателем посредством замедляющей зубчатой или клиноременной передачи, можно значительно расширить или сузить диапазон регулирования скоростей [124]. На фиг. 220, б приведена зависимость числа оборотов двигателя толкателя п ., результирующей замыкающей силы —Рз, усилия толкателя Р ., а также напряжения тока ротора датчика частоты V в зависимости от числа оборотов датчика частоты п . По графику видно, что с увеличением напряжение тока датчика частоты уменьшается и соответственно уменьшается подъемная сила толкателя Р .. До тех пор, пока Ру. больше усилия замыкания Р , соответствующего тормозному моменту, способному удержать груз на весу (до точки а по фиг. 219, б), тормоз будет разомкнут. С увеличением и соответственным уменьшением Ру возрастает результирующее
[c.337]
При спуске тяжелых грузов главный двигатель может быть выключен, а толкатель подсоединен к датчику частоты, что обеспечивает плавное притормаживание шкива и обеспечивает нормальную скорость. По этой электросхеме можно комбинировать торможение противотоком с механическим торможением, что несколько разгружает тормоз и увеличивает диапазон регулирования скорости на ступенях ниже асинхронной скорости.
[c.339]
По этой электросхеме можно комбинировать торможение противотоком с механическим торможением, что несколько разгружает тормоз и увеличивает диапазон регулирования скорости на ступенях ниже асинхронной скорости.
[c.339]
Червячно-винтовая передача необратима. Выходная жесткость передачи возрастает с увеличением передаточного отношения. Однако его увеличение влечет за собой повышение кинематических погрешностей (неравномерность скорости) и препятствует расширению диапазона регулирования скоростей движения активного захвата. Поэтому обычно диапазон регулирования скоростей в машинах с механическим возбуждением находится в пределах 3—4 порядков и в исключительных случаях достигает 5—6 порядков. Для расширения диапазонов регулирования непосредственно приводом используют следящие гидропередачи. Наилучшими регулировочными параметрами (идеально жесткая скоростная характеристика в пределах мощности) обладают синхронные следящие гидропередачи. [c.175]
Диапазон регулирования скоростей и подач определяется а) диаметрами обрабатываемых отверстий, которые выбираются от наибольшего условного диаметра сверления, соответствующего проектируемому станку, до наименьшего, принимаемого с перекрытием диапазона станка соседнего типоразмера по ГОСТ 1227-41
[c. 358]
358]
Система электропривода определяется диапазоном регулирования скорости, видом требуемой механической характеристики (жесткая, мягкая), точностью поддержания заданного режима, режимом работы по времени (длительный, повторно-кратковременный, кратковременный), частотой включений при- [c.237]
В табл. 13 приведены технические данные некоторых тахогенераторов постоянного тока, предназначенных для работы в качестве датчиков скорости в электрических схемах с широким диапазоном регулирования скорости электроприводов (металлорежущие станки и другие машины) и для измерения скорости враи е-ния электроприводов. [c.499]
Система Г — Д с ЭМУ позволяет получить жесткие характеристики (скорость мало зависит от нагрузки) и ем самым расширить диапазон регулирования скорости до 1 100, а в специальных случаях и значительно больше, форсировать процессы пуска и торможен] я и осуществлять автоматическое регулирование ско-)ости в функции различных параметров. В частности, может быть осуществлено регулирование скорости двигателя в функции его нагрузки и получены характеристики вида, показанного на фиг. 38.
[c.519]
В частности, может быть осуществлено регулирование скорости двигателя в функции его нагрузки и получены характеристики вида, показанного на фиг. 38.
[c.519]
Схема ЭЛИР применяется для двигателей небольшой мощности (до 5 кет) и обеспечивает диапазон регулирования скорости до 25 1. [c.553]
Шестеренные коробки передач. Характерные особенности широкий диапазон.регулирования скорости и мощности, возможность совмещения регулирования со значительным редуцированием, долговечность и надежность работы, жесткость характеристики. Затрудняют управление на быстром ходу н автоматизацию управления. [c.331]
Однако не следует стремиться к полной универсальности станка, так как при этом бывает трудно обеспечить широкий диапазон регулирования скоростей и подач и значительную мощность привода. Практически одни станки мoJ yт быть рационально приспособлены для работы при высоких скоростях и меньшей мощности, другие, напротив, — при меньших скоростях и большей мощности. [c.584]
[c.584]
При отказе от использования переборного устройства вращение от коробки скоростей передается ременной передачей непосредственно шпинделю станка. Вместо коробки скоростей может быть установлен вариатор для бесступенчатого регулирования скорости механического, гидравлического или электрического типов. Диапазон регулирования скоростей при этом методе находится в пределах 3—10, а объем работ по модернизации значительный, зато повышение мощности и быстроходности так же может быть значительным. [c.585]
Существенное по вышение быстроходности шпинделя, некоторое снижение эффективной мощности, сохранение прежнего диапазона регулирования скорости, малый объем работ [c.586]
Повышение быстроходности и мощности в нужных пределах, небольшой диапазон регулирования скорости, значительный объем работ [c.586]
Однако не следует стремиться к полной универсальности станка, так как при этом бывает трудно обеспечить широкий диапазон регулирования скоростей
[c. 501]
501]
Диапазон регулирования скорости вращения колеса определяется возможностями системы питания приводного двигателя. [c.58]
Плавность трогания с места и перехода с одного режима на другой, большой диапазон регулирования скорости ведомого вала при сохранении постоянного числа оборотов ведущего вала, ограничение крутильных колебаний и защита от толчков, возникающих во всем приводе, отсутствие износа деталей — все эти свойства обусловили широкое распространение привода с гидродинамической передачей. [c.6]
Принятая конструкция гидромуфты обеспечивает диапазон регулирования скорости вращения, равный трем в приводе машин, у которых крутящий момент пропорционален квадрату скорости и равный двум — в приводах машин с постоянным крутящим моментом. [c.182]
На основании графиков для гидромуфт Л и В мы можем заключить, что характеристика гидромуфты В создает больший диапазон регулирования скорости приводимой машины по сравнению с муфтой А при том же интервале изменения чисел оборотов двигателя. Чем мягче гидромуфта, тем менее эластичный требуется двигатель.
[c.95]
Чем мягче гидромуфта, тем менее эластичный требуется двигатель.
[c.95]
При этом диапазон регулирования скорости равен [c.263]
На рис. 1.42 показана зависимость объемного к. п. д. гидромотора, № 20 при работе его в насосном режиме от давления нагнетания при разных температурах рабочей жидкости. Диапазон регулирования скорости вращения вала гидромотора при работе с насосом того же номера достигает 1 1000. В конце гарантийного срока объемный к. п. д. гидромашин в большинстве случаев, как правило, остается в пределах, заданных для новой машины. [c.45]
В техническое задание на проектирование гидропривода обычно входят назначение привода описание условий его эксплуатации основные технические требования, включающие характер движения выходного звена, максимальное значение преодолеваемой нагрузки, диапазон регулирования скорости, требования к ее стабильности индикаторная диаграмма технологического процесса, обеспечиваемая работой гидропривода, и т. п.
[c.266]
п.
[c.266]
Большинство современных машин создается по схеме двигатель — передача — исполнительный орган машины (рис. 6.1). Все двигатели для уменьшения массы, габаритов и стоимости выполняют быстроходными с узким диапазоном регулирования скоростей. Непосредственное соеди11ение двигателя с рабочим органом машины хотя и возможно, но применяется крайне редко (например, гидравлические насосы, вентиляторы). Как правило, между двигателем и исполнительным органом машины устанавливают промежуточный механизм — передачу. [c.104]
Фрикционное колесо соединено с колесом 1 дифференциала через коническую передачу с передаточным отношением, равным единице, а колесо Дз — непосредственно с колесом 3. Соединение бесступенчатой передачи с дифференциалом имеет целью увеличение диапазона регулирования скоростей, под которым понимается отношение модулей максимального иередаточиого отношения к минимальному. Диапазон регулирования обозначается буквой б с индексами соответствуюш,его передаточного отношения. Например, для бесступенчатой передачи, состоящей из колес 3 и 4.
[c.213]
Например, для бесступенчатой передачи, состоящей из колес 3 и 4.
[c.213]
Фригщионное колесо Д4 соединено с колесом 1 дифференциала через коническую передачу с передаточным отношением, равным единице, а колесо Дз—непосредственно с колесом 3. Соединение бесступенчатой передачи с дифференциалом может иметь две цели 1) увеличение диапазона регулирования скоростей и 2) уменьшение мощности бесступенчатой передачи по сравнению с мощностью всей передачи. [c.474]
Вариаторы скорости с клинчатыми ремнями и раздвижными шкивами, составленными из дисков, получили широкое применение в промышленности, так как в большинстве случаев они просты по конструкции, бесшумно работают, не требуют большого первоначального натяжения ремня, надежны в работе, легко и просто (на ходу) во время работы вариатора регулируется скорость ведомого вала. Большое разнообразие существующих конструкций шкивов, различие сочетания сдвоенных вариаторов скорости, а также сочетания клиноремеппого вариатора с различными схемами зубчатых -передач позволяют легко выбрать наиболее рациональную схему в соответствии с заданной мощностью и необходимым диапазоном регулирования скорости. [c.317]
[c.317]
К характеристикам, получаемым в системе при постоянном потоке двигателя и Ug-= = var (1—6, фиг. 19), обычно добавляются характеристики при постоянном напряжении генератора = onst и при переменном потоке возбуждения двигателя ф = уаг (7—13, фиг. 19). Эти характеристики используются для более высоких скоростей при расширении диапазона регулирования скорости. Строго говоря, они уже не будут параллельны характеристикам при Ug= var однако в масштабе графического изображения на фиг. 19 они могут считаться параллельными. Характеристики ниже оси абсцисс соответствуют обратному направлению вращения двигателя. Система Леонарда позволяет осуществить весьма плавное торможение с непрерывной рекуперацией энергии до самых малых скоростей. Переход от одной характеристики к другой при пуске производится постепенной перестановкой вручную или автоматически сначала реостата цепи возбуждения генератора (усиление его поля), а затем реостата цепи возбуждения двигателя (ослабление поля двигателя). Простота получения большого числа ступеней в цепи возбуждения генератора обеспечивает возможность исключительно плавного пуска электропривода. Торможение в ней производится в обратном порядке. Сначала повышается ток возбуждения двигателя до максимального значения, а потом уменьшается ток возбуждения генератора до минимального значения. При этом машина-двигатель почти всё время работает на генераторных тормозных характеристиках, так как э. д. с. двигателя оказывается больше э. д. с. генератора и ток идёт из двигателя в генератор.
[c.13]
Простота получения большого числа ступеней в цепи возбуждения генератора обеспечивает возможность исключительно плавного пуска электропривода. Торможение в ней производится в обратном порядке. Сначала повышается ток возбуждения двигателя до максимального значения, а потом уменьшается ток возбуждения генератора до минимального значения. При этом машина-двигатель почти всё время работает на генераторных тормозных характеристиках, так как э. д. с. двигателя оказывается больше э. д. с. генератора и ток идёт из двигателя в генератор.
[c.13]
Привод, запускаемый одновременно с ножницами, осуществляется обычно от сериесного двигателя или от шунтового, работающего по системе Леонарда. Привод по системе Леонарда обладает широким диапазоном регулирования скорости и по сравнению с сериес-ным приводом снижает расход энергии, так как при пуске двигателя потери незначительны, а торможение обычно происходит с рекуперацией энергии. [c.968]
Диапазон регулирования скорости двигателя в этой системе достигает 1 20. При применении специальных схем с электромашинными усилителями диапазон регулиронания может быть увеличен примерно до 1 1000.
[c.421]
При применении специальных схем с электромашинными усилителями диапазон регулиронания может быть увеличен примерно до 1 1000.
[c.421]
При разработке высокоточных систем программного управления возникают дополнительные требования, относящиеся как к системе управления, так и к самому станку (создание безлюфтовых силовых передач, отсутствие прерывистого движения при малых подачах, широкий диапазон регулирования скорости исполнительных двигателей и т. д.). [c.288]
Повышение быстро ходиости шпинделя в широких пределах, ограниченные возможности повышения эффективной мощности, сохранение диапазона регулирования скорости, небольшой объем работ [c.586]
LUXOR Головка термостатическая ТТ 3000. Диапазон регулирования:6-30 градусов цельсия
Термостатическая головка Luxor TT 3000 помогает создать комфортную температуру и экономить расход энергии. Головка спроектирована таким образом, чтобы быстро реагировать на любые изменения в настройках. В случае если отапливаемое помещение временно не используется, есть опция защиты от замерзания.
В случае если отапливаемое помещение временно не используется, есть опция защиты от замерзания.
Luxor TT 3000 – идеальное решение для повышения эффективности использования отопления.
Габариты
Вес Брутто, кг
0.12
Габариты с упаковкой, м
0.05×0.05×0.085
Общая информация
Вид арматуры
термоголовки
Материал изготовления
пластик, латунь
Страна производитель
Италия
Характеристики
Максимальная установочная температура, C
30
Максимальное рабочее давление, бар
10
Минимальная установочная температура, C
6
Информация на сайте носит информационный характер и не является публичной офертой.
Внешний вид товара может отличаться от фотографий на сайте при внесении изменений производителем в конструкцию изделия не ухудшающих его заявленных технических характеристик и ненадлежащего качества.
Информацию о товарах, их наличии и цене уточняйте у наших менеджеров.
Регулировка напряжения
| Трансформеры | Учебник по электронике
Как мы видели в нескольких анализах SPICE ранее в этой главе, выходное напряжение трансформатора изменяется в зависимости от сопротивления нагрузки, даже при постоянном входном напряжении.
На степень отклонения влияют индуктивности первичной и вторичной обмоток, среди других факторов, не в последнюю очередь из которых входит сопротивление обмотки и степень взаимной индуктивности (магнитной связи) между первичной и вторичной обмотками.
Для силовых трансформаторов, где трансформатор воспринимается нагрузкой (в идеале) как постоянный источник напряжения, рекомендуется, чтобы вторичное напряжение изменялось как можно меньше для больших колебаний тока нагрузки.
Формула регулирования напряжения
Мера того, насколько хорошо силовой трансформатор поддерживает постоянное вторичное напряжение в диапазоне токов нагрузки, называется регулировкой напряжения трансформатора . Его можно рассчитать по следующей формуле:
Что такое «Полная нагрузка»?
«Полная нагрузка» означает точку, в которой трансформатор работает при максимально допустимом вторичном токе.Эта рабочая точка будет определяться в первую очередь размером провода обмотки (допустимой нагрузкой) и методом охлаждения трансформатора.
Взяв в качестве примера нашу первую симуляцию трансформатора SPICE, давайте сравним выходное напряжение при нагрузке 1 кОм и нагрузке 200 Ом (предполагая, что нагрузка 200 Ом будет нашим условием «полной нагрузки»). Если хотите, вспомните, что постоянное первичное напряжение было 10,00 вольт переменного тока:
.
частота v (3,5) i (vi1) 6.000E + 01 9.962E + 00 9.962E-03 Выход при нагрузке 1 кОм частота v (3,5) i (vi1) 6.000E + 01 9.348E + 00 4.674E-02 Выход при нагрузке 200 Ом
 962E-03 Выход при нагрузке 1 кОм
частота v (3,5) i (vi1)
6.000E + 01 9.348E + 00 4.674E-02 Выход при нагрузке 200 Ом
962E-03 Выход при нагрузке 1 кОм
частота v (3,5) i (vi1)
6.000E + 01 9.348E + 00 4.674E-02 Выход при нагрузке 200 Ом
Обратите внимание, как выходное напряжение уменьшается по мере увеличения нагрузки (увеличения тока). Теперь давайте возьмем ту же схему трансформатора и поместим сопротивление нагрузки чрезвычайно высокой величины поперек вторичной обмотки, чтобы смоделировать состояние «холостого хода»: (См. Список специй «трансформатор»)
трансформатор v1 1 0 ac 10 грех rbogus1 1 2 1e-12 rbogus2 5 0 9e12 l1 2 0100 l2 3 5 100 К l1 l2 0.999 vi1 3 4 ac 0 rload 4 5 9e12 .ac lin 1 60 60 .print ac v (2,0) i (v1) .print ac v (3,5) i (vi1) .конец
частота v (2) i (v1) 6.000E + 01 1.000E + 01 2.653E-04 частота v (3,5) i (vi1) 6.000E + 01 9.990E + 00 1.110E-12 Выход на (почти) холостом ходу
Итак, мы видим, что наше выходное (вторичное) напряжение находится в диапазоне 9,990 В при (практически) холостом ходу и 9,348 В в точке, которую мы решили назвать «полной нагрузкой». Рассчитывая стабилизацию напряжения по этим цифрам, получаем:
Рассчитывая стабилизацию напряжения по этим цифрам, получаем:
Между прочим, это будет считаться довольно плохим (или «слабым») регулированием для силового трансформатора.При питании такой простой резистивной нагрузки хороший силовой трансформатор должен иметь процент регулирования менее 3%.
Индуктивные нагрузки, как правило, создают условия худшего регулирования напряжения, поэтому этот анализ с чисто резистивными нагрузками был «наилучшим случаем».
Приложения, требующие «плохих» правил
Однако есть некоторые приложения, где действительно желательно плохое регулирование. Одним из таких случаев является разрядное освещение, когда требуется повышающий трансформатор для первоначальной генерации высокого напряжения (необходимого для «зажигания» ламп), а затем ожидается, что напряжение упадет, когда лампа начнет потреблять ток.
Это связано с тем, что требования к напряжению газоразрядных ламп имеют тенденцию быть намного ниже после того, как на пути дуги появился ток. В этом случае повышающего трансформатора с плохой стабилизацией напряжения вполне достаточно для обеспечения питания лампы.
В этом случае повышающего трансформатора с плохой стабилизацией напряжения вполне достаточно для обеспечения питания лампы.
Другое применение — регулирование тока для аппаратов дуговой сварки на переменном токе, которые представляют собой не что иное, как понижающие трансформаторы, подающие низковольтную и сильноточную энергию для процесса сварки.
Требуется высокое напряжение, чтобы помочь «зажечь» дугу (запустить ее), но, как и для газоразрядной лампы, дуга не требует такого большого напряжения для поддержания себя, когда воздух нагревается до точки ионизации.Таким образом, уменьшение вторичного напряжения при высоком токе нагрузки было бы хорошо.
Некоторые конструкции аппаратов для дуговой сварки обеспечивают регулировку тока дуги с помощью подвижного стального сердечника в трансформаторе, который оператор вводит или выключает из обмотки.
Перемещение железной заготовки от обмоток снижает силу магнитной связи между обмотками, что снижает вторичное напряжение холостого хода. и ухудшают регулирование напряжения.
и ухудшают регулирование напряжения.
Феррорезонансный трансформатор
Ни одно изложение регулирования трансформатора нельзя назвать полным без упоминания необычного устройства под названием феррорезонансный трансформатор .
«Феррорезонанс» — это явление, связанное с поведением железных сердечников при работе вблизи точки магнитного насыщения (где сердечник настолько сильно намагничен, что дальнейшее увеличение тока обмотки приводит к небольшому увеличению магнитного потока или его отсутствию).
Феррорезонансный трансформатор, который трудно описать без углубления в теорию электромагнитного поля, представляет собой силовой трансформатор, спроектированный для работы в условиях постоянного насыщения сердечника.
То есть его железный сердечник «заполнен» магнитными линиями потока на протяжении большей части цикла переменного тока, так что колебания напряжения питания (тока первичной обмотки) мало влияют на плотность магнитного потока сердечника, что означает вторичную обмотка выдает почти постоянное напряжение, несмотря на значительные колебания напряжения питания (первичной обмотки).
Резонансные цепи в феррорезонансных трансформаторах
Обычно насыщение сердечника трансформатора приводит к искажению формы синусоидальной волны, и феррорезонансный трансформатор не является исключением.Для борьбы с этим побочным эффектом феррорезонансные трансформаторы имеют вспомогательную вторичную обмотку, соединенную параллельно с одним или несколькими конденсаторами, образующими резонансный контур, настроенный на частоту источника питания.
Эта «баковая цепь» служит фильтром для подавления гармоник, создаваемых насыщением сердечника, и обеспечивает дополнительное преимущество сохранения энергии в виде колебаний переменного тока, которые доступны для поддержания выходного напряжения обмотки в течение коротких периодов потери входного напряжения ( время в миллисекундах, но определенно лучше, чем ничего).
Феррорезонансный трансформатор обеспечивает регулировку выходного напряжения.
Помимо блокировки гармоник, создаваемых насыщенным сердечником, этот резонансный контур также «отфильтровывает» гармонические частоты, генерируемые нелинейными (переключающими) нагрузками во вторичной цепи обмотки, и любые гармоники, присутствующие в напряжении источника, обеспечивая «чистую» мощность для нагрузка.
Феррорезонансные трансформаторы
обладают несколькими функциями, полезными при регулировании мощности переменного тока: постоянное выходное напряжение при значительных колебаниях входного напряжения, фильтрация гармоник между источником питания и нагрузкой и способность «преодолевать» кратковременные потери мощности за счет сохранения запаса энергии. в резонансном контуре бака.
Эти трансформаторы также очень устойчивы к чрезмерной нагрузке и переходным (кратковременным) скачкам напряжения. Фактически, они настолько терпимы, что некоторые из них могут быть кратковременно подключены параллельно к несинхронизированным источникам питания переменного тока, что позволяет переключать нагрузку с одного источника питания на другой в режиме «перед отключением» без прерывания подачи питания на источник питания. вторичная сторона!
Известные недостатки феррорезонансных трансформаторов
К сожалению, эти устройства имеют не менее примечательные недостатки: они тратят много энергии (из-за гистерезисных потерь в насыщенном сердечнике), выделяя значительный тепла в процессе, и не переносят изменения частоты, что означает, что они не работают. очень хорошо работает от небольших генераторов с приводом от двигателя, имеющих плохую регулировку скорости.
очень хорошо работает от небольших генераторов с приводом от двигателя, имеющих плохую регулировку скорости.
Напряжения, возникающие в резонансной цепи обмотки / конденсатора, имеют тенденцию быть очень высокими, что требует дорогих конденсаторов и создает для сервисного техника очень опасные рабочие напряжения. Однако в некоторых приложениях преимущества феррорезонансного трансформатора могут быть поставлены выше его недостатков.
Полупроводниковые схемы существуют для «кондиционирования» питания переменного тока в качестве альтернативы феррорезонансным устройствам, но ни один из них не может конкурировать с этим трансформатором с точки зрения его простоты.
ОБЗОР:
- Регулировка напряжения — это мера того, насколько хорошо силовой трансформатор может поддерживать постоянное вторичное напряжение при постоянном первичном напряжении и большом разбросе тока нагрузки.Чем ниже процентное значение (ближе к нулю), тем стабильнее вторичное напряжение и тем лучше регулирование, которое оно обеспечивает.
- Феррорезонансный трансформатор — это специальный трансформатор, предназначенный для стабилизации напряжения на стабильном уровне, несмотря на большие колебания входного напряжения.

СВЯЗАННЫЕ РАБОЧИЕ ЛИСТЫ:
Резонансные преобразователи с коммутируемыми конденсаторами с широким диапазоном регулирования линии и схемами управления для ШИМ плюс преобразователи постоянного тока с фазовой модуляцией
Часть I: Резонансные преобразователи с коммутируемыми конденсаторами с широким диапазоном регулирования линии
Традиционный преобразователь с коммутируемыми конденсаторами (SCC) ) обычно имеет такие недостатки, как высокий скачок переходного тока, жесткое переключение и ограниченный диапазон регулирования линии.В этой диссертации предлагается семейство резонансных двухконтактных повышающих преобразователей с переключаемыми конденсаторами (RTBSC) и семейство лестничных резонансных преобразователей с переключаемыми конденсаторами (RSC) с низким выбросом переходного тока, операцией мягкого переключения и широким диапазоном регулирования линии. За счет установки небольшой резонансной катушки индуктивности достигается дополнительное преимущество сокращения одной или двух громоздких конденсаторных батарей до гораздо меньших резонансных конденсаторов. При работе выше резонансной частоты транзисторы включаются, а диоды отключаются с переключением при нулевом токе (ZCS).Самое главное, значительно расширен диапазон усиления по напряжению. Эта резонансная конфигурация применима к TBSC, Ladder SCC и Dickson SCC.
За счет установки небольшой резонансной катушки индуктивности достигается дополнительное преимущество сокращения одной или двух громоздких конденсаторных батарей до гораздо меньших резонансных конденсаторов. При работе выше резонансной частоты транзисторы включаются, а диоды отключаются с переключением при нулевом токе (ZCS).Самое главное, значительно расширен диапазон усиления по напряжению. Эта резонансная конфигурация применима к TBSC, Ladder SCC и Dickson SCC.
Тем не менее, возможности регулирования предлагаемых RTBSC и лестничных RSC все еще остаются проблемой в условиях малой нагрузки. Чтобы облегчить эту проблему, предлагается семейство повышающих резонансных преобразователей на переключаемых конденсаторах (RSC) с плавно регулируемым коэффициентом преобразования, основанное на концепции Cuk Dual Resonance Core (DRC). Благодаря своевременной модуляции с фиксированной частотой его коэффициент преобразования может непрерывно и эффективно изменяться даже в условиях небольшой нагрузки (1/10 номинальной мощности). Конфигурация Cuk DRC применима к последовательно-параллельному (SP) SCC, Fibonacci SCC, удвоителю напряжения (VD) и Dickson SCC.
Конфигурация Cuk DRC применима к последовательно-параллельному (SP) SCC, Fibonacci SCC, удвоителю напряжения (VD) и Dickson SCC.
Часть II: Карты управления для ШИМ и преобразователей постоянного тока с фазовой модуляцией
В этой части дается всесторонний анализ принципа работы, способности передачи энергии, напряжения компонентов и рабочей области переключения при нулевом напряжении (ZVS) для представлены трехуровневый двунаправленный двухтактный преобразователь с модуляцией ШИМ плюс фазовый сдвиг (PPS) и семейство двухуровневых изолированных двунаправленных преобразователей постоянного тока (IBDC) с модуляцией PPS.На основе анализа составляется набор управляющих карт для помощи в работе и проектировании преобразователя в регионах с низким циркулирующим током, в регионах с высокой пропускной способностью и в регионах с ZVS. На картах управления идентифицируется параметр схемы, обеспечивающий расчетный предел для выбора частоты переключения, индуктивности рассеяния, коэффициента трансформации и уровня мощности преобразователей постоянного тока с модуляцией PPS.
2055.1 :: RS 30: 2055.1 — Тир спортивный; регулирование; шумовое загрязнение; неприятности :: Законы Луизианы 2011 года :: Кодексы и статуты США :: Закон США :: Justia
§2055.1. Спортивный тир; регулирование; шумовое загрязнение; неприятность
A. (1) Несмотря на любые другие положения закона об обратном, лицо, которое управляет или использует спортивное стрельбище в этом штате, не подлежит гражданской ответственности или уголовному преследованию по любому вопросу, связанному с шумом или шумовым загрязнением в результате эксплуатации или использования диапазона, если диапазон был установлен, построен или эксплуатировался до введения в действие каких-либо законов, постановлений, правил или постановлений о контроле шума, или если диапазон соответствует любым законам, постановлениям о контроле шума , правила или положения, которые применялись к диапазону и его эксплуатации во время создания, строительства или первоначальной эксплуатации диапазона.
(2) Правила или положения, принятые государственным или местным департаментом или агентством для ограничения уровней шума в децибелах, который может возникать на открытом воздухе, не применяются к спортивному тиру, освобожденному от ответственности в соответствии с настоящим Разделом.
(3) Постановление муниципального контроля за шумом не может требовать или применяться так, чтобы требовать от спортивного стрелкового тира ограничивать или исключать стрельбу, которая происходила на регулярной основе на стрельбище до даты вступления в силу постановления.
B. (1) За исключением случаев, предусмотренных в этом Разделе, лицо не может проводить действия, мешающие шуму, против стрелкового тира, расположенного поблизости от собственности этого человека, если тир был установлен, построен или эксплуатировался с момента его основания. дата, когда лицо приобрело недвижимость. Если после того, как лицо приобрело собственность, произошло существенное изменение в использовании диапазона, это лицо может подать иск о причинении неудобств, если иск подан в течение трех лет с даты существенного изменения в использовании.
(2) Лицо, которое владеет имуществом в непосредственной близости от стрелкового тира, которое было создано, построено или эксплуатировалось после того, как это лицо приобрело собственность, может подать иск о нарушении шума против этого тира только в том случае, если иск возбужден в пределах пяти лет после создания ассортимента или через три года после существенного изменения в использовании диапазона.
(3) Если стрельба на тире не велась в течение двух лет, возобновление стрельбы считается созданием нового стрельбища для целей настоящего Раздела.
C. (1) Если иное не предусмотрено в данной статье, данная статья не запрещает органам местного самоуправления регулировать расположение и строительство спортивного стрелкового тира после даты вступления в силу настоящего раздела.
(2) Ничто в этом Разделе не ограничивает способность местного органа власти регулировать шум, производимый в результате существенного изменения в использовании диапазона.
D. Положения Р.С. 30: 2053 (6), (7), (8) и (9) и 2055.1, содержащиеся в настоящем документе, не должны изменять или иным образом влиять на иски, поданные до 15 августа 1997 г.
Закон 1997 г., № 891, §1.
Заявление об отказе от ответственности: Эти коды могут быть не самой последней версией. Луизиана может располагать более актуальной или точной информацией. Мы не даем никаких гарантий относительно точности, полноты или адекватности информации, содержащейся на этом сайте, или информации, на которую есть ссылки на государственном сайте. Пожалуйста, проверьте официальные источники.
Раздел 220-2-.151 — Правила стрельбы из лука, Алабама. Админ. Код r. 220-2-.151
Ток через регистр Vol.39, No. 4, 29 января 2021 г.
Раздел 220-2-.151 — Постановление о стрельбе из лука (1) Стрельба из любого типа лука или арбалета на любом стрельбище, используемом сейчас или в будущем, является незаконным. , или в партнерстве с Отделом дикой природы и пресноводного рыболовства, за исключением случаев, предусмотренных следующими правилами. Все пользователи диапазона должны соблюдать перечисленные правила и опубликованные правила, относящиеся к используемому диапазону. Разрешения на использование в исключительных случаях выдаются координатором Hunter по обучению или назначенным им лицом.При необходимости диапазон может быть закрыт. (a) Стрельба открыта только в светлое время суток, за исключением случаев, когда есть разрешение Координатора обучения Hunter или назначенного им представителя. (b) Запрещение употребления алкогольных напитков. (c) Стрелы могут быть нацелены на тетиву только стоя на линии стрельбы, готовясь к стрельбе. (d) Стрельба разрешена только с линии стрельбы и только по обозначенным мишеням. (e) Стрелкам разрешается приносить и стрелять по бумажной мишени, установленной на существующей мишени, и должна быть удалена с тира, как только человек закончит стрельбу.Личные цели не допускаются на стрельбище, кроме как по разрешению. (f) Луки должны быть подвешены на стрелке за линией стрельбы, когда они ждут начала стрельбы или пока лучники находятся на дальности и забирают стрелы. Стрельба не разрешается, пока кто-либо находится ниже дистанции. (g) Все люди должны оставаться за линией стрельбы во время стрельбы. (h) Стрелы из луков с натяжным усилием 30 фунтов и более могут стрелять только по мишеням на стрельбище для взрослых. Стрелы из луков с натяжным весом менее 30 фунтов могут стрелять по мишеням на юношеском или взрослом тире. (i) Только стрелы с полевыми или целевыми точками могут использоваться или иметься на расстоянии. На стрельбище не разрешается владеть широкополосными головками, кроме как с разрешения Координатора по обучению охотников или назначенного им представителя. (j) Все люди, стоящие на возвышенной платформе или использующие ее, должны носить страховочные ремни, включая плечевые и ножные ремни, и прикрепляться к соответствующему карабину с тросом безопасности. (k) Все использованные бумажные мишени и другой мусор должны быть помещены в мусорное ведро или удалены пользователем с полигона. (l) Все жители Алабамы в возрасте от 16 до 64 лет должны иметь действующую лицензию штата Алабама на охоту, государственную лицензию на управление дикой природой или лицензию штата на использование заповедника. Все нерезиденты в возрасте 16 лет и старше должны иметь либо действующую лицензию штата Алабама: на охоту, либо лицензию штата на управление дикой природой для использования ареала. (m) Луки будут натянуты только таким образом, чтобы предотвратить случайную или преднамеренную потерю стрелы из свойства дальности. (n) Нарушение любых опубликованных ограничений считается незаконным. (2) Наказание за нарушение любого из положений этого постановления должно быть в соответствии с законом.
Ала. Админ. Код r. 220-2-.151
Новое правило: подано 16 марта 2009 г .; действует с 20 апреля 2009 г. Изменено: подана 9 сентября 2009 г .; действует с 14 октября 2009 г. Изменено: подана 12 октября 2011 г .; действует с 16 ноября 2011 г. Изменено: подана 20 августа 2012 г .; вступает в силу 24 сентября 2012 г. Изменен Ежемесячным административным томом Алабамы XXXIV, выпуск No.10, 29 июля 2016 г., эфф. 26 августа 2016 г. Изменено в Ежемесячном административном томе Алабамы XXXVIII, выпуск № 10, 31 июля 2020 г., эфф. 14 сентября 2020 г. Изменено в ежемесячном административном томе Алабамы XXXIX, выпуск № 02, 30 ноября 2020 г., эфф. 14 января 2021 г.
Автор: Н. Гюнтер Гай младший
Законодательные органы: Кодекс штата Алабама 1975 , §§ 9-2-7, 9-2-8, 9-2- 12.
КОДЕКС МЕСТНОГО ГОСУДАРСТВА ГЛАВА 236. РЕГУЛИРОВАНИЕ ОГНЯ, НОЖЕЙ, БОЕПРИПАСОВ, ПРИНАДЛЕЖНОСТЕЙ И СПОРТИВНОЙ СТРЕЛЬБЫ
КОДЕКС МЕСТНОГО ГОСУДАРСТВА ГЛАВА 236.Окружные правила в отношении огнестрельного оружия, ножей, боеприпасов, огнестрельного оружия и спортивной стрельбы
КОДЕКС МЕСТНОГО ГОСУДАРСТВА
НАЗВАНИЕ 7. РЕГУЛИРОВАНИЕ ЗЕМЕЛЬПОЛЬЗОВАНИЯ, СТРУКТУР, ПРЕДПРИНИМАТЕЛЬСТВА И СМЕЩЕННОЙ ДЕЯТЕЛЬНОСТИ
ПОДРАЗДЕЛЕНИЕ B. РЕГУЛИРУЮЩИЕ ОРГАНЫ ОКРУГА
ГЛАВА 236. РЕГУЛИРОВАНИЕ ПОЛОЖЕНИЙ, УПРАВЛЕНИЕ ПОЛОЖЕНИЕМ ОКРУГА, УПРАВЛЕНИЕ ПОЛОЖЕНИЕМ УРОВНЯ
п. 236.001. ОПРЕДЕЛЕНИЯ. В этой группе:
(1) «Пневматическое оружие», «боеприпасы» и «огнестрельное оружие или принадлежности для пневматического оружия» имеют значения, указанные в Разделе 229.001.
(1-а) «Нож» имеет значение, определенное статьей 46.01 Уголовного кодекса.
(2) «Тир для спортивной стрельбы» имеет значение, определенное статьей 250.001.
Добавлен законами 2011 г., 82-й лег., Р.С., гл. 624 (S.B.766), гл. 6, эфф. 1 сентября 2011 года.
Изменено:
Acts 2013, 83rd Leg., R.S., Ch. 1210 (S.B. 1400), гл. 5, эфф. 14 июня 2013 г.
Деяния 2015 г., 84-й лег., Р.С., гл. 700 (H.B. 905), разд. 5, эфф. 1 сентября 2015 г.
Акты 2019 г., 86-й лег., Р.С., гл. 1164 (H.B. 3231), разд. 2, эфф. 1 сентября 2019.
сек. 236.002. ОРУЖИЕ; ПИСТОЛЕТЫ; СПОРТИВНАЯ СТРЕЛКА. (a) Несмотря на любой другой закон, включая главу 251 Сельскохозяйственного кодекса, округ не может принимать или применять правила, касающиеся:
(1) передачи, владения, ношения, ношения, владения, хранения, транспортировки, лицензирования или регистрации огнестрельного оружия, пневматического оружия, ножей, боеприпасов или принадлежностей или принадлежностей для огнестрельного или пневматического оружия;
(2) торговля огнестрельным оружием, пневматическим оружием, ножами, боеприпасами, огнестрельным оружием или расходными материалами или принадлежностями для пневматического оружия; или
(3) выстрел из огнестрельного или пневматического оружия в спортивном тире.
(b) Постановление, правило, резолюция или политика, принятые или соблюдаемые округом, или официальное действие, в том числе в любых законодательных, полицейских или служебных полномочиях, предпринятые сотрудником или агентом округа в нарушение этот раздел недействителен.
(c) Подраздел (a) не влияет на полномочия округа:
(1) требовать, чтобы резидент или государственный служащий был вооружен для личной или национальной обороны, обеспечения правопорядка или для других целей в соответствии с другим законодательством;
(2) регулируют разряд огнестрельного или пневматического оружия в соответствии с разделом 235.022;
(3) регулируют ношение огнестрельного оружия лицом, имеющим лицензию на ношение пистолета в соответствии с подразделом H главы 411 Правительственного кодекса в соответствии с разделом 411.209 Правительственного кодекса;
(4), за исключением случаев, предусмотренных Подразделом (d), принимать или обеспечивать соблюдение общеприменимых правил землепользования, правил пожарной безопасности или правил ведения бизнеса; или
(5), за исключением случаев, предусмотренных Подразделом (e), регулируют или запрещают ношение или владение работником огнестрельного оружия, принадлежностей к огнестрельному оружию или боеприпасов во время выполнения служебных обязанностей.
(d) Постановление округа или постановление, разработанное или соблюдаемое с целью эффективного ограничения или запрещения производства, продажи, покупки, передачи или демонстрации огнестрельного оружия, принадлежностей для огнестрельного оружия или боеприпасов, которые являются законными в этом штате, являются недействительными.
(e) Подраздел (c) (5) не разрешает округу регулировать ношение или владение огнестрельным оружием сотрудником в нарушение подраздела G главы 52 Трудового кодекса.
(f) Генеральный прокурор может подать иск от имени штата, чтобы получить временный или постоянный судебный запрет против округа, принимающего постановление, кроме постановления в соответствии с Разделом 236.003, в нарушение этого раздела. Генеральный прокурор может взыскать разумные расходы, понесенные при получении судебного запрета в соответствии с настоящим подразделом, включая судебные издержки, разумные гонорары адвоката, расходы на расследование, гонорары свидетелей и расходы по депонированию.
Добавлен законами 2011 г., 82-й лег., Р.С., гл. 624 (S.B.766), гл. 6, эфф. 1 сентября 2011 года.
Изменено:
Acts 2013, 83rd Leg., R.S., Ch. 1210 (S.B. 1400), гл. 6, эфф. 14 июня 2013 г.
Деяния 2015 г., 84-й этап., Р.С., гл. 700 (H.B. 905), разд. 6, эфф. 1 сентября 2015 г.
Деяния 2019 г., 86-й лег., Р.С., гл. 1164 (H.B. 3231), разд. 3, эфф. 1 сентября 2019.
сек. 236.003. РЕГУЛИРОВАНИЕ ТИПА СПОРТИВНОЙ СТРЕЛЬБЫ НА ОТКРЫТОМ ВОЗДУХЕ. Несмотря на Раздел 236.002, округ может регулировать разряд огнестрельного или пневматического оружия на открытом спортивном стрелковом тире, как это предусмотрено Подглавой B, Главой 235.
Добавлен законами 2011 г., 82-й лег., Р.С., гл. 624 (S.B.766), гл. 6, эфф. 1 сентября 2011 г.
Изменено:
Законы 2013 г., 83-й лег., Р.С., гл. 1210 (S.B. 1400), гл. 7, эфф. 14 июня 2013 г.
Раздел 30-A, §3011: Регулирование спортивных тиров
1.
Определение.
В данном разделе «спортивный тир» означает зону, предназначенную и используемую для стрельбы из лука, стендовой стрельбы и других аналогичных видов спорта, а также для стрельбы из винтовок, ружей и пистолетов.
[PL 1995, c. 231, §2 (НОВОЕ).]
2.
Ограничение.
Муниципальный контроль шума или другое постановление не может требовать или применяться так, чтобы требовать от спортивного стрелкового тира ограничивать или исключать стрельбу, которая происходила на регулярной основе на стрельбище до даты вступления в силу постановления, пока дальность стрельбы соответствует общепринятым правилам техники безопасности при стрельбе на стрельбище или сконструирована таким образом, чтобы снаряд не мог пересечь границу дальности.
[PL 2015, c. 433, §3 (AMD).]
3.
Расширение деятельности.
Ничто в этом разделе не ограничивает способность муниципалитета регулировать расположение и строительство нового спортивного стрелкового тира или существенное изменение использования существующего тира 1 сентября 2016 г. или после этой даты.
[PL 2015, c. 433, §3 (AMD).]
4.
Обслуживание и доработки.
Муниципалитет не может ограничивать спортивное стрелковое стрельбище, созданное до 1 сентября 2016 года, от проведения технического обслуживания или иного улучшения спортивного стрелкового тира и его зданий, сооружений и территорий в отношении:
А.Повышение общественной безопасности и сдерживания выстрелов;
[PL 2015, c. 433, §4 (НОВОЕ).]
Б.
Обеспечение доступа для людей с ограниченными возможностями и обеспечение помещений для отдыха;
[PL 2015, c. 433, §4 (НОВОЕ).]
С.В противном случае поддержание или улучшение пригодности зданий и территорий для проживания, если такое обслуживание или улучшения иным образом соответствуют общеприменимым строительным кодексам и постановлениям муниципалитета о зонировании; и
[PL 2015, c. 433, §4 (НОВОЕ).]
Д.
Ремонт или восстановление здания или сооружения, поврежденных в результате пожара, обрушения, взрыва или стихийных бедствий, если такой ремонт или перестройка иным образом соответствуют общеприменимым строительным нормам муниципалитета и завершены в течение 2 лет с момента утраты или повреждения.
[PL 2015, c. 433, §4 (НОВОЕ).]
[PL 2015, c. 433, §4 (НОВОЕ).]
РАЗДЕЛ ИСТОРИЯ
PL 1995 г., г. 231, §2 (НОВОЕ). PL 2015, c. 433, §§3, 4 (AMD).
Регуляция генов дальнего действия и новые терапевтические применения | Кровь
Из-за их ключевой роли в заболевании человека нацеливание на эти недавно установленные, связанные с заболеванием, дальнодействующие взаимодействия стало привлекательной терапевтической стратегией.Последние достижения в технологиях редактирования генома, такие как использование нуклеаз типа «цинковые пальцы» (ZnF), эффекторных нуклеаз, подобных активаторам транскрипции (TALEN), или системы CRISPR / Cas9 (см. Gaj et al. 59 и Gupta and Musunuru 60 для исчерпывающих обзоров), сделать возможными целевые стратегии модификации энхансеров и открыть новые захватывающие возможности для терапевтических манипуляций с топологией генома.
В вышеупомянутом исследовании Gröschel et al., 7 удаление онкогенного энхансера GATA2 из генома AML с использованием TALEN- или CRISPR / Cas9-опосредованного редактирования генома вызвало in vitro остановку роста и дифференциацию отредактированного лейкозного клетки, демонстрируя многообещающий потенциал захваченных онкогенных энхансеров в качестве терапевтических мишеней.
Активность энхансера
часто сильно зависит от типа клеток, и даже широко экспрессируемые гены, по-видимому, обладают тканеспецифичными энхансерами, управляющими их экспрессией. 61 Эта типоспецифическая природа энхансеров делает их подходящими мишенями для тканеспецифической модуляции экспрессии генов. Нацеливание на энхансеры (а не на промоторы или сами генные продукты) дает то преимущество, что позволяет подавлять экспрессию генов, специфичную для определенного типа клеток (рис. 2).Такая стратегия даже позволила бы снизить уровни белков, которые в настоящее время не обрабатываются, в том числе ТФ. 62 Этот принцип был впервые исследован Bauer et al. С использованием технологии редактирования генома для удаления эритроид-специфичного энхансера гена BCL11A TF. 13 BCL11A широко известен как важная терапевтическая мишень для лечения β-талассемии и серповидноклеточной анемии (β-гемоглобинопатии), 2 распространенных генетических нарушений эритроидов, вызванных, соответственно, количественным или качественным дефектом продукции гемоглобина у взрослых. 63,64 В эритроидных клетках BCL11A играет важную роль в регуляции гена β-глобина, и его истощение во взрослых эритроидных клетках приводит к сильной реактивации фетальной (β-подобной) экспрессии гена γ-глобина, которая может эффективно компенсировать для низкого обильного или дефектного взрослого гемоглобина. 65-67 Однако, поскольку BCL11A представляет собой широко экспрессируемый TF и участвует в лимфомагенезе, 68,69 нацеливание на сам белок остается проблематичным. В эритроидных клетках экспрессия BCL11A контролируется интронными энхансерами, расположенными от 55 до 62 т.п.н. ниже сайта начала транскрипции. 13 Нацеленная делеция этих энхансеров резко снижает экспрессию BCL11A , специфически в эритроидных клетках, показывая, что нацеленные энхансеры позволяют тканеспецифическое молчание широко экспрессируемых генов. Можно представить себе другие стратегии, основанные на редактировании генома, для управления биологией энхансеров, такие как специфическое нацеливание репрессорных (доменных) слитых белков на энхансеры, ассоциированные с заболеванием. Mendenhall и др. Первыми изобрели этот подход путем слияния доменов эффекторных повторов, подобных активатору транскрипции (TAL), с гистоновой деметилазой LSD1.Нацеливание этого гибридного белка на геном эффективно снижает активность энхансера, что приводит к подавлению активности близлежащих генов. 70
.