
Драйверы и контроллеры шагового двигателя
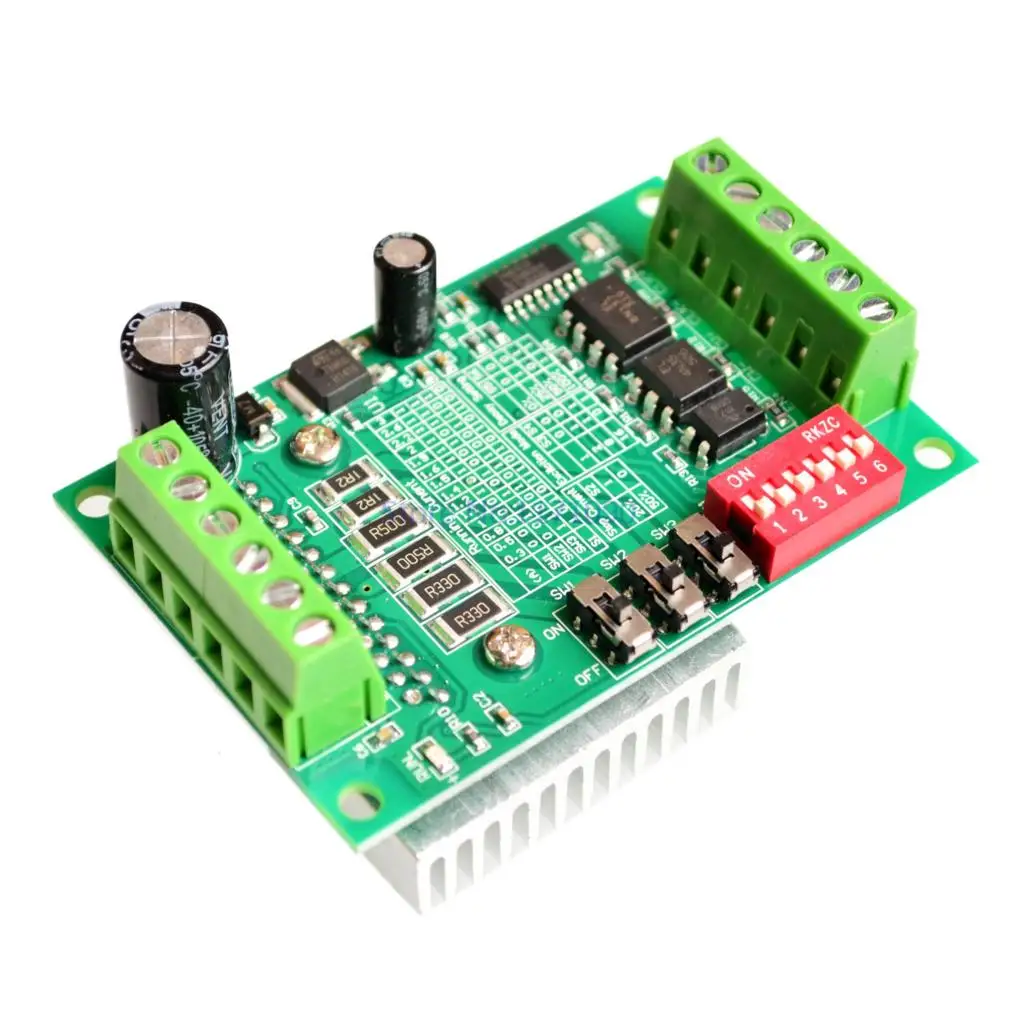
Для управления приводами требуется специальный драйвер шагового двигателя
Драйвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.

Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются. Смысл совершенствования в том, чтобы обеспечить получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностях, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов. При этом средний ток обмотки может достигать 2,5 А.
При этом средний ток обмотки может достигать 2,5 А.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями. Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
 Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя. Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот. Каждый импульс перемещает ротор на 3,75 градуса.
 Каждый импульс перемещает ротор на 3,75 градуса.
Каждый импульс перемещает ротор на 3,75 градуса.Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.
Драйвер шагового двигателя. Тестируем микросхему L9110 / Хабр
Откуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением. Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется. Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.
Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы. При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
Драйвер для шагового двигателя из принтера
Простой драйвер для шагового двигателя
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством.
Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
В принципе, подойдут и собратья этих микросхем, такие как ULN2023A, ULN2803 и им подобные. Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
Схема подключения
Схема подключения проста.
Потребуется приобрести разъем DB-25, который будет подключаться к порту компьютера, для управления двигателем, в случае, если конструируется ЧПУ станок. Диапазоны входного напряжения указаны для конкретно этой микросхемы. Остальные микросхемы, возможно, потребуют отличного от этого напряжения питания.
В качестве источника питания отлично подойдет компьютерный блок питания. В принципе, подойдет любое зарядное или БП, напряжением от 12В до 24В, с током от 350мА.
Стоит отметить, что желательно обладать технической документацией к модели используемого двигателя, что упростит его подключение к драйверу.
Сам драйвер выглядит так:
В случае если документация не найдена на двигатель, то попробовать найти шины питания требуется в первую очередь. Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Если конструкция делается для станка с ЧПУ, то на компьютер потребуется скачать программу Turbo CNC и настроить её под свои нужды.
Драйвер шагового двигателя с энкодером 2HSS57, 2-х фазный, для двигателей Nema 23
Качественные драйверы шаговых двигателей с сертификатом качества.
Главными особенностями двигателей с энкодером являются: быстрая реакция на команды, отсутствие рывков и работа без потери шагов. Максимальная эффективная работа шагового двигателя с энкодером обеспечивается совместным его использованием с гибридными шаговым серводрайвером с поддержкой обратной связи.
СКАЧАТЬ ПОЛНЫЙ КАТАЛОГ КОМПЛЕКТУЮЩИХ SZGH
Технические характеристики драйвера 2HSS57:
1) Внешняя регулируемая функция микрошага (новинка)
2) Регулируемый и простой в эксплуатации двигатель CCW и CW вперед и назад (новый)
3) Полное управление с обратной связью
4) Энкодер 1000PPR
5) Выходной крутящий момент почти 100%
6) Быстрый отклик, высокая скорость
7) Ввод в режиме управления положением:
A.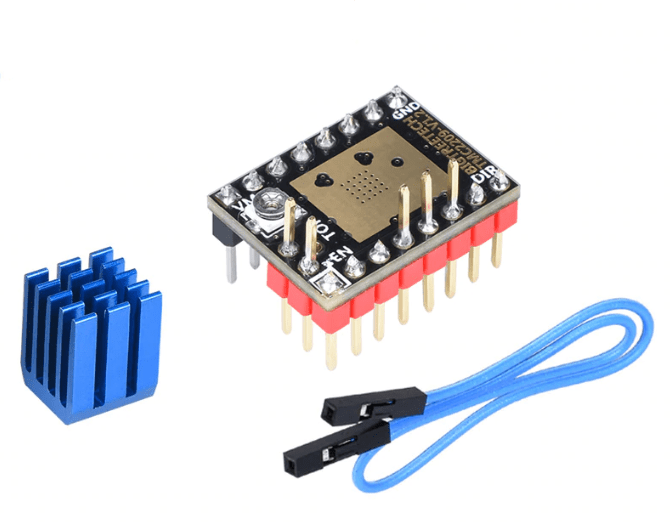 Импульс + направление
Импульс + направление
Б. Импульс + отрицательное направление
C. Двойной импульс
D. Связь
8) Входной интерфейс сброса сервопривода с оптической изоляцией ERC
9) Интерфейс выхода сигнала тревоги оптической изоляции ALM
10) Ширина токовой петли: (-3 дБ) 2 кГц (типичное значение)
11) Ширина петли скорости: 500 Гц (типичное значение)
12) Ширина позиционной петли: 200 Гц (типичное значение)
13) Интерфейс входа энкодера: дифференциальный вход (26LS32)
14) Можно загрузить параметр с помощью кабеля RS232 или текстового дисплея.
15) Защита от перегрузки по току, перенапряжения, пониженного напряжения, перегрева, превышения скорости, избыточного напряжения.
16) Зеленый светодиод означает, что включен, красный светодиод означает защиту или неисправность.
Нужна техническая консультация? Поможем с подбором комплектующих: +380957007282 (Viber, WhatsApp, Telegram), +380677007282, +380737007282⠀⠀
Драйвер шагового мотора Leadshine M542
Аналоговые драйверы для 2-х фазных шаговых двигателей, серия М
|
Модель |
Фаза |
Серия |
Тип управления |
Мощность |
|
Конфигурация |
Тип разъема | ||
|
Напряжение (В) |
Ток (A) | ||||||||
|
Переменный ток |
Постоянный ток |
Пиковая мощность | |||||||
|
M542 |
2 |
М |
Step & Dir |
— |
24 — 50 |
1.  0 — 4.2 0 — 4.2 |
17, 23 |
DIP-переключатель |
× |
|
M550 |
2 |
М |
Step & Dir |
— |
20 — 50 |
1.2 — 5.0 |
14, 17, 23 |
DIP-переключатель |
× |
|
M752 |
2 |
М |
Step & Dir |
— |
20 — 70 |
1.26 — 5.2 |
23, 34 |
DIP-переключатель |
× |
|
M860 |
2 |
М |
Step & Dir |
— |
24 — 80 |
2.  4 — 7.2 4 — 7.2 |
17,23,34 |
DIP-переключатель |
× |
|
M860A |
2 |
М |
Step & Dir |
— |
24 — 80 |
2.8 — 7.8 |
23, 34 |
DIP-переключатель |
× |
|
M860H |
2 |
М |
Step & Dir |
36 — 80 |
50 — 110 |
2.4 — 7.2 |
34, 42 |
DIP-переключатель |
× |
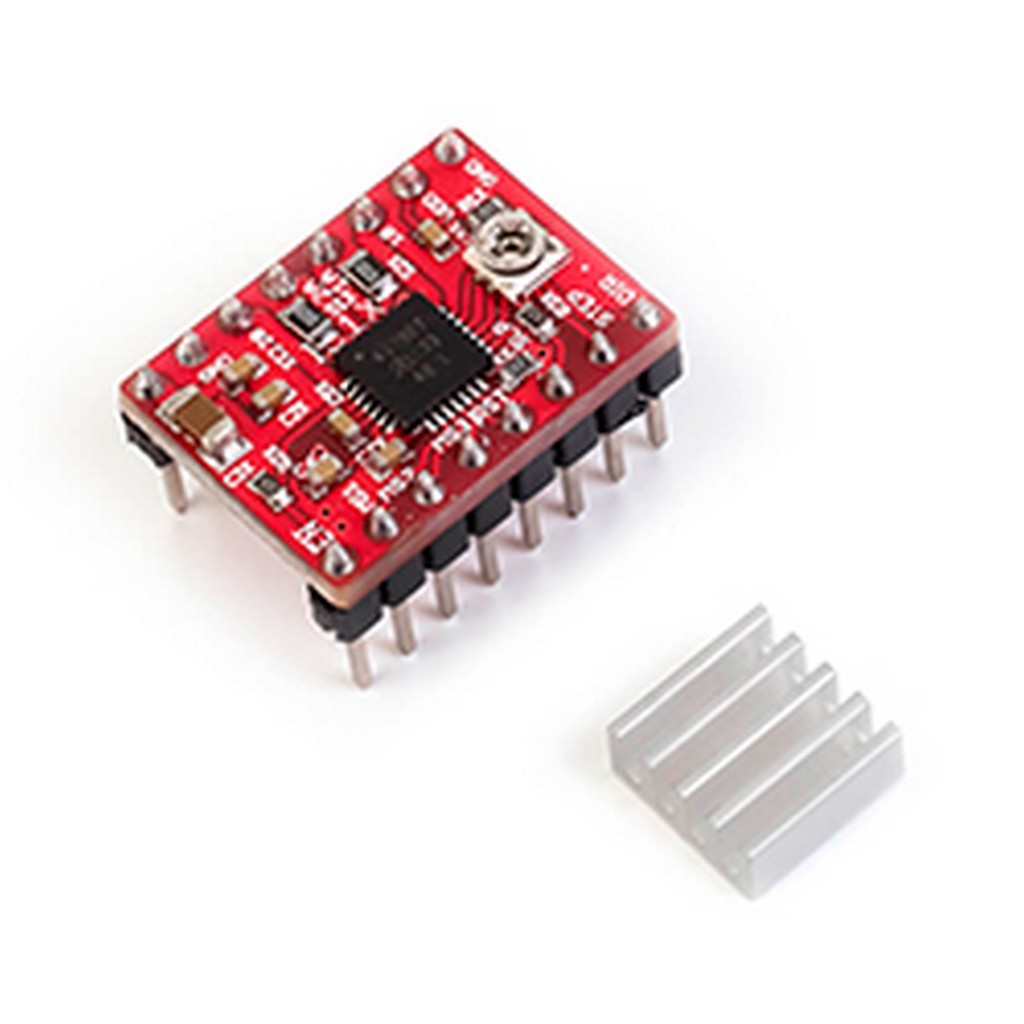
Драйвер шагового двигателя A4988 | AmperMarket.kz
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 1 revolution slowly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
// Spin the stepper motor 1 revolution quickly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
//Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
}
Шаговый двигатель и драйвер шагового двигателя
Зачем использовать планетарный редуктор на шаговом двигателе?
Сообщение: Марк Лю, 17/12/2021
38 0
Хотя шаговые двигатели характеризуются способностью к точному позиционированию и высоким крутящим моментом на низких скоростях, они должны быть тщательно подобраны, чтобы гарантировать, что шаговый двигатель совместим с параметрами нагрузки и приложения, так что возможность потери шагов или шагового двигателя stal
Подробнее
Что такое планетарный редуктор и как он работает?
Сообщение: Марк Лю, 15/12/2021
42 0
Планетарные редукторы — это редукторы, широко применяемые в промышленной приводной технике благодаря своей компактной конструкции и универсальности. Поскольку планетарные передачи не установлены в стационарном положении, они совершают орбитальные движения. Вот почему планетарный редуктор также представлен планетарной коробкой передач.
Поскольку планетарные передачи не установлены в стационарном положении, они совершают орбитальные движения. Вот почему планетарный редуктор также представлен планетарной коробкой передач.
Подробнее
Бесщеточный двигатель постоянного тока против щеточного двигателя постоянного тока
Сообщение: Марк Лю, 12.10.2021
52 0
Есть два типа часто используемых двигателей постоянного тока: щеточный двигатель постоянного тока и бесщеточный двигатель постоянного тока (или двигатель постоянного тока с BLDC). Название бесщеточный двигатель постоянного тока относится к щеточному двигателю постоянного тока.Щеточный двигатель постоянного тока состоит из статора, ротора, щеток и коллектора, функция щеток и коммутатора — переключать направление.
Подробнее
Сравнение бесщеточного двигателя постоянного тока и шагового двигателя
Сообщение: Марк Лю, 06/12/2021
137 0
Бесщеточный двигатель постоянного тока — это высокопроизводительный двигатель, его самой большой особенностью является то, что он имеет внешние характеристики двигателя постоянного тока, но без традиционных контактных коммутаторов и щеток. В нем используется ротор с постоянными магнитами без потерь на возбуждение.Обмотки тепловыделяющего якоря смонтированы на
В нем используется ротор с постоянными магнитами без потерь на возбуждение.Обмотки тепловыделяющего якоря смонтированы на
Подробнее
Что такое бесщеточный двигатель постоянного тока и как он работает?
Сообщение: Марк Лю, 01/12/2021
95 0
Бесщеточный двигатель постоянного тока, сокращенно бесщеточный двигатель постоянного тока или двигатель BLDC, также известный как двигатель с электронной коммутацией (двигатель ECM или EC) или синхронный двигатель постоянного тока — это синхронный двигатель, использующий источник питания постоянного тока. Бесщеточный двигатель постоянного тока преодолевает ряд предыдущих проблем.
Подробнее
Цифровой драйвер | Шаговый драйвер
| Серия | Серия T | Серия Y | Серия S | Серия N |
| Уровни продукта | Высокая производительность | Высокая производительность | Ведущие китайские бренды | Китайские ведущие бренды |
| Компоненты, используемые в Driver | Ведущие мировые бренды | Ведущие мировые бренды | Стандарт | Любитель DIY |
| OEM-производитель | TOP1 производитель в Китае | TOP3 производитель в Китае | TOP5 производитель в Китае | TOP10 производитель в Китае |
| Стабильность | Сверхвысокая стабильность | Сверхвысокая стабильность | Высокая стабильность | Высокая стабильность |
| Производительность | Высокая оптимизация для средних и высоких скоростей | Сбалансированная производительность mance | Сбалансированная производительность | Высоко оптимизированная для работы на низких скоростях |
| Характеристики продукта | Рекомендуемые продукты | Рекомендуемые продукты | Снят с производства | Снят с производства |
Сортировать по: DefaultName (A — Z) Name (Z — A) Цена (Низкая> Высокая) Цена (Высокая> Низкая) Рейтинг (Наивысшая) Рейтинг (Наименьшая) Модель (A — Z) Модель (Z — A)
Показать: 20255075100
-20%
Артикул: DM320T
17 долларов. 13,59 $ Начиная с: 13,01 $ 00
00
-23%
Артикул: DM332T
Это цифровой шаговый привод, реализованный с использованием передовой технологии управления шаговым двигателем. Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23 размера) с меньшим нагревом и шумом. Это работает ..
$ 20,62 $ 15,86 Начиная с: 15,17 $
Артикул: DM420Y
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании автоматизации.Он особенно эффективен в применении.
19,56 $ Начиная с: 17,60 $
-23%
Артикул: DM542T
26,51 $ 20,39 $ Начиная с: 19,51 $
Артикул: DM542Y
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках машины, лазерное оборудование, этикетировочные машины, электронное оборудование, рекламное оборудование и другое оборудование для автоматизации. Особенно эффективен в применении ..
Особенно эффективен в применении ..
29 $.34 Начиная с: 26,40 $
-23%
Артикул: DM556T
29,46 $ 22,66 $ Начиная с: 21,68 $
-23%
Артикул: DM860I
43,00 $ 33,08 долл. используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен в применении..
32,60 $ Начиная с: 29,34 $
-30%
Артикул: DM860N
46,61 $ 32,63 $ Начиная с: 27,97 $
-23%
SKU: DM860T
$ 49,78 $ 38960
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации.Он особенно эффективен в применении.
48,90 $ Всего: 44,01 $
SKU: DM2282T
DM2282T — это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP на основе новейшей технологии управления движением.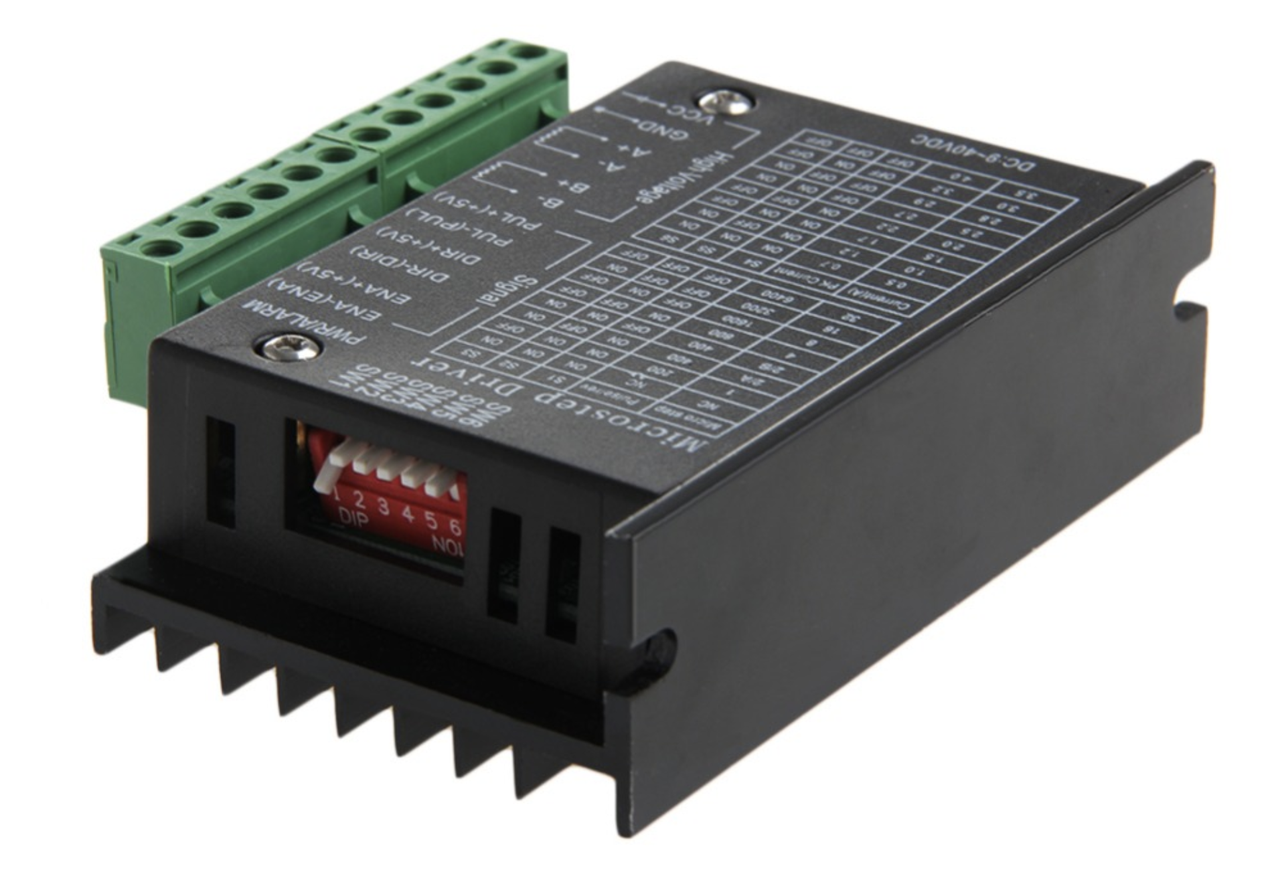 Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
154,53 $ Всего: 122,00 $
Артикул: 3DM2283T
3DM2283T — это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP на основе новейших технологий. технология управления движением.Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
154,53 $ Всего: 122,00 $
SKU: ISD02
ISD02 — это серия миниатюрных высокопроизводительных драйверов шаговых двигателей с параллельным портом управления. это его небольшой размер и сильная управляемость. Его толщина менее 14 мм. Их можно установить непосредственно на ..
28,69 $ Всего: 24,20 $
SKU: ISD04
ISD04 — это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления.Его самая большая особенность — небольшой размер и высокая управляемость.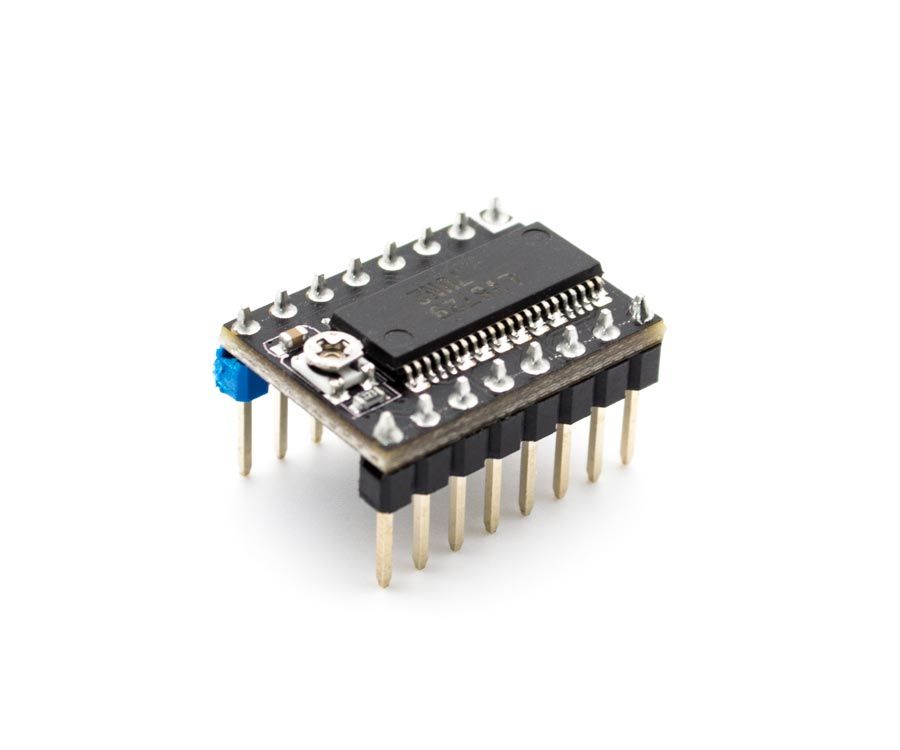 Толщина менее 14 мм. Их можно установить непосредственно на NE ..
Толщина менее 14 мм. Их можно установить непосредственно на NE ..
44,33 долл. США. От: 37,41 долл. США
SKU: ISD08
ISD08 представляет собой серию контроллеров с параллельным портом. миниатюрных высокопроизводительных драйверов шагового двигателя. Самая большая его особенность — небольшие размеры и отличные ходовые качества. Его толщина менее 14 мм. Их можно установить непосредственно на ..
59,98 $ Всего: 50,61 $
SKU: ISC02
ISC02 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя.Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью анального ..
33,25 $ Всего: 28,36 $
SKU: ISC04
ISC04 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC04 скорость двигателя можно контролировать с помощью аналогового . .
.
47,10 $ Всего: 40 $.18
SKU: ISC08
ISC08 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC08 скорость двигателя можно контролировать с помощью аналогового ..
66,50 $ Всего: 56,72 $
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с контролем скорости
Шаговые двигатели
с легкостью обеспечивают точное позиционирование.Они используются в различных типах оборудования для точного контроля угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели создают высокий крутящий момент с компактным корпусом и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также сохраняют свое положение при остановке благодаря своей механической конструкции. Решения с шаговыми двигателями состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Oriental Motor предлагает множество решений для широкого спектра применений:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей переменного или постоянного тока
- Размеры рамы от 0.От 79 дюймов (20 мм) до 3,54 дюйма (90 мм)
Подробнее …
Шаговые двигатели (только двигатели)
Oriental Motor предлагает широкий спектр шаговых двигателей, включая; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны в размерах от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять вариантов шаговых двигателей редукторного типа, опции энкодера и тормоза, а также различные обмотки двигателя.
- 0.79 ~ 3,54 дюйма (20 ~ 90 мм) Шаговые двигатели NEMA 8 ~ NEMA 34 типоразмера
- Доступны шестерни без люфта, с низким люфтом и прямозубые шестерни
- Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
Драйверы шагового двигателя
Драйверы шагового двигателя преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Драйверы шаговых двигателей AlphaStep с замкнутым контуром, 2-фазных шаговых двигателей или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet / IP ™, EtherCAT, PROFINET Совместимые версии
- Доска или коробка Тип
EtherNet / IP ™ является товарным знаком ODVA
Шаговые двигатели и драйверы с регулировкой скорости
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера.Рабочую скорость, время ускорения и замедления, рабочий ток можно установить с помощью переключателей драйвера, и простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры / Сетевые шлюзы
Контроллеры
и сетевые шлюзы для использования с системами управления движением.
- Контроллеры
- для использования с драйверами импульсного входа
- Сетевые преобразователи / шлюзы (связь RS-485)
- EtherCat
- CC-Ссылка
- MECHATROLINK
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления.Двигатель работает за счет точной синхронизации с выходным импульсным сигналом от контроллера к драйверу. Шаговые двигатели, с их способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации, идеально подходят для приложений, требующих быстрого позиционирования на короткое расстояние.
Точное позиционирование с точностью до шага
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «углом основного шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели — 0,9 ° и 1,8 °.
Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели — 0,9 ° и 1,8 °.
Используя технологию гибридного шагового двигателя
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничен в осевом направлении, как шаговый двигатель с постоянным магнитом, а на статор подается электромагнитное питание, как у шагового двигателя с переменным магнитным сопротивлением.И статор, и ротор имеют несколько зубьев.
Гибридный шаговый двигатель имеет намагниченный в осевом направлении ротор, что означает, что один конец намагничен как северный полюс, а другой конец — как южный полюс. Чашки зубчатого ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Конфигурация системы для высокоточного позиционирования показана ниже. Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого многократно меняется между ВКЛ и ВЫКЛ. Каждый цикл включения / выключения считается одним импульсом. Команда с одним импульсом заставляет выходной вал двигателя поворачиваться на один шаг. Уровни сигнала, соответствующие состояниям включения и выключения напряжения, обозначаются как «H» и «L» соответственно.
Величина вращения пропорциональна количеству импульсов
Величина вращения шагового двигателя пропорциональна количеству импульсных сигналов (количеству импульсов), подаваемых драйверу.Взаимосвязь вращения шагового двигателя (угла поворота выходного вала двигателя) и количества импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоты импульсов), подаваемых водителю. Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Создание высокого крутящего момента с помощью компактного корпуса
Шаговые двигатели создают высокий крутящий момент благодаря компактному корпусу.Эти характеристики обеспечивают им отличное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в увеличении крутящего момента на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживается в остановленном положении
Шаговые двигатели продолжают создавать удерживающий момент даже в состоянии покоя.Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
При отключении питания самоудерживающийся момент двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В подъемниках и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели с замкнутым контуром и драйверы — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для раскрытия максимальных характеристик шагового двигателя.Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Типы операционных систем
Каждый шаговый двигатель и драйвер объединяют в себе шаговый двигатель, выбранный из различных типов, со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, а затем вводит операционную команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем через подключенный напрямую персональный компьютер или программируемый контроллер.Поскольку отдельный генератор импульсов не требуется, драйверы этого типа экономят место и упрощают электромонтаж.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100–115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100–115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение.
Рекомендуется, чтобы для вашего приложения были рассмотрены системы двигателя и привода переменного тока, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока.
tb6600_stepper_motor_driver_sku__dri0043-DFRobot
- ДОМ
- СООБЩЕСТВО
- ФОРУМ
- БЛОГ
- ОБРАЗОВАНИЕ
ДОМОЙ
ФОРУМ
БЛОГ
Контроллер
DFR0010 Arduino Nano 328
DFR0136 Сервоконтроллер Flyduino-A 12
DFR0225 Romeo V2-Все в одном контроллере R3
Arduino_Common_Controller_Selection_Guide
DFR0182 Беспроводной геймпад V2.0
DFR0100 Комплект для начинающих DFRduino для Arduino V3
DFR0267 Блуно
DFR0282 Жук
DFR0283 Мечтатель клен V1.
0DFR0296 Блуно Нано
DFR0302 MiniQ 2WD Plus
DFR0304 Беспроводной геймпад BLE V2
DFR0305 RoMeo BLE
DFR0351 Romeo BLE mini V2.0
DFR0306 Блуно Мега 1280
DFR0321 Узел Wido-WIFI IoT
DFR0323 Блуно Мега 2560
DFR0329 Блуно М3
DFR0339 Жук Блуно
DFR0343 Контроллер с низким энергопотреблением UHex
DFR0355 SIM808 с материнской платой Leonardo
DFR0392 DFRduino M0 материнская плата, совместимая с Arduino
DFR0398 Romeo BLE Quad Robot Controller
DFR0416 Bluno M0 Материнская плата
DFR0575 Жук ESP32
DFR0133 X-Board
DFR0162 X-Board V2
DFR0428 3.
5-дюймовый сенсорный TFT-экран для Raspberry PiDFR0494 Raspberry Pi ШАПКА ИБП
DFR0514 DFR0603 IIC 16X2 RGB LCD KeyPad HAT V1.0
DFR0524 5.5 HDMI OLED-дисплей с емкостным сенсорным экраном V2.0
DFR0550 5-дюймовый TFT-дисплей с сенсорным экраном V1.0
DFR0591 модуль дисплея raspberry pi e-ink V1.0
DFR0592 Драйвер двигателя постоянного тока HAT
DFR0604 HAT расширения ввода-вывода для нулевого числа Pi V1.0
DFR0566 Шляпа расширения ввода-вывода для Raspberry Pi
DFR0528 Шляпа ИБП для Raspberry Pi Zero
DFR0331 Romeo для контроллера Edison
DFR0453 DFRobot CurieNano — мини-плата Genuino Arduino 101
TEL0110 CurieCore Intel® Curie Neuron Module
DFR0478 Микроконтроллер FireBeetle ESP32 IOT (V3.
0) с поддержкой Wi-Fi и BluetoothDFR0483 FireBeetle Covers-Gravity I O Expansion Shield
FireBeetle Covers-24 × 8 светодиодная матрица
TEL0121 FireBeetle Covers-LoRa Radio 433 МГц
TEL0122 FireBeetle Covers-LoRa Radio 915 МГц
TEL0125 FireBeetle охватывает LoRa Radio 868MHz
DFR0489 FireBeetle ESP8266 Микроконтроллер IOT
DFR0492 FireBeetle Board-328P с BLE4.1
DFR0498 FireBeetle Covers-Camera & Audio Media Board
DFR0507 FireBeetle Covers-OLED12864 Дисплей
DFR0508 FireBeetle Covers-Двигатель постоянного тока и шаговый драйвер
DFR0511 FireBeetle Covers-ePaper Черно-белый дисплейный модуль
DFR0531 FireBeetle Covers-ePaper Черно-белый и красный дисплейный модуль
DFR0536 Micro bit плата расширения геймпада
DFR0548 Плата расширения микробитового драйвера
ROB0148 micro: Maqueen для micro: bit
ROB0150 Microbit Круглая плата расширения для светодиодов RGB
MBT0005 Micro IO-BOX
SEN0159 Датчик CO2
DFR0049 DFRobot Датчик газа
TOY0058 Датчик атмосферного давления
SEN0220 Инфракрасный датчик CO2 0-50000ppm
SEN0219 Гравитационный аналоговый инфракрасный датчик CO2 для Arduino
SEN0226 Датчик барометра Gravity I2C BMP280
SEN0231 Датчик гравитации HCHO
SEN0251 Gravity BMP280 Датчики атмосферного давления
SEN0132 Датчик угарного газа MQ7
SEN0032 Трехосный акселерометр — ADXL345
DFR0143 Трехосевой акселерометр MMA7361
Трехосный акселерометр серии FXLN83XX
SEN0072 CMPS09 — Магнитный компас с компенсацией наклона
SEN0073 9 степеней свободы — бритва IMU
DFR0188 Flymaple V1.
1SEN0224 Трехосевой акселерометр Gravity I2C — LIS2DH
SEN0140 Датчик IMU с 10 степенями свободы, версия 2.0
SEN0250 Gravity BMI160 6-осевой инерционный датчик движения
SEN0253 Gravity BNO055 + BMP280 интеллектуальный 10DOF AHRS
SEN0001 URM37 V5.0 Ультразвуковой датчик
SEN0002 URM04 V2.0
SEN0004 SRF01 Ультразвуковой датчик
SEN0005 SRF02 Ультразвуковой датчик
SEN0006 SRF05 Ультразвуковой датчик
SEN0007 SRF08 Ультразвуковой датчик
SEN0008 SRF10 Ультразвуковой датчик
SEN0149 URM06-RS485 Ультразвуковой
SEN0150 URM06-UART Ультразвуковой
SEN0151 URM06-PULSE Ультразвуковой
SEN0152 URM06-ANALOG Ультразвуковой
SEN0153 Ультразвуковой датчик URM07-UART
SEN0246 URM08-RS485 Водонепроницаемый гидролокатор-дальномер
SEN0304 Ультразвуковой датчик URM09 (Gravity-I2C) (V1.
0)SEN0304 Ультразвуковой датчик URM09 (Gravity-I2C) (V1.0)
SEN0300 Водонепроницаемый ультразвуковой датчик ULS
SEN0301 Водонепроницаемый ультразвуковой датчик ULA
SEN0307 URM09 Аналог ультразвукового датчика силы тяжести
SEN0311 A02YYUW Водонепроницаемый ультразвуковой датчик
SEN0312 ME007YS Водонепроницаемый ультразвуковой датчик
SEN0313 A01NYUB Водонепроницаемый ультразвуковой датчик
DFR0066 SHT1x Датчик влажности и температуры
DFR0067 DHT11 Датчик температуры и влажности
SEN0137 DHT22 Модуль температуры и влажности
DFR0023 Линейный датчик температуры DFRobot LM35
DFR0024 Gravity DS18B20 Датчик температуры, совместимый с Arduino V2
DFR0024 Gravity DS18B20 Датчик температуры, совместимый с Arduino V2
SEN0114 Датчик влажности
Датчик температуры TOY0045 TMP100
TOY0054 SI7021 Датчик температуры и влажности
SEN0206 Датчик инфракрасного термометра MLX
SEN0227 SHT20 Водонепроницаемый зонд датчика температуры и влажности I2C
SEN0236 Gravity I2C BME280 Датчик окружающей среды Температура, влажность, барометр
SEN0248 Gravity I2C BME680 Датчик окружающей среды VOC, температура, влажность, барометр
DFR0558 Цифровой высокотемпературный датчик силы тяжести типа К
SEN0308 Водонепроницаемый емкостный датчик влажности почвы
SEN0019 Регулируемый переключатель инфракрасного датчика
SEN0042 DFRobot Инфракрасный датчик прорыва
SEN0143 SHARP GP2Y0A41SK0F ИК-датчик рейнджера 4-30см
SEN0013 Sharp GP2Y0A02YK ИК-датчик рейнджера 150 см
SEN0014 Sharp GP2Y0A21 Датчик расстояния 10-80 см
SEN0085 Sharp GP2Y0A710K Датчик расстояния 100-550 см
Модуль цифрового ИК-приемника DFR0094
DFR0095 Модуль цифрового ИК-передатчика
SEN0018 Цифровой инфракрасный датчик движения
DFR0107 ИК-комплект
SEN0264 TS01 ИК-датчик температуры (4-20 мА)
SEN0169 Аналоговый pH-метр Pro
DFR0300-H Gravity: аналоговый датчик электропроводности (K = 10)
DFR0300 Гравитационный аналоговый датчик электропроводности V2 K = 1
SEN0165 Аналоговый измеритель ОВП
SEN0161-V2 Комплект аналогового гравитационного измерителя pH V2
SEN0161 PH метр
SEN0237 Гравитационный аналоговый датчик растворенного кислорода
SEN0204 Бесконтактный датчик уровня жидкости XKC-Y25-T12V
SEN0205 Датчик уровня жидкости-FS-IR02
SEN0244 Gravity Analog TDS Sensor Meter для Arduino
SEN0249 Комплект измерителя pH с аналоговым наконечником копья силы тяжести для применения в почве и пищевых продуктах
SEN0121 Датчик пара
SEN0097 Датчик освещенности
DFR0026 Датчик внешней освещенности DFRobot
TOY0044 УФ-датчик
SEN0172 LX1972 датчик внешней освещенности
SEN0043 TEMT6000 датчик внешней освещенности
SEN0175 УФ-датчик v1.
0-ML8511SEN0228 Gravity I2C VEML7700 Датчик внешней освещенности
SEN0101 Датчик цвета TCS3200
DFR0022 Датчик оттенков серого DFRobot
Датчик отслеживания линии SEN0017 для Arduino V4
SEN0147 Интеллектуальный датчик оттенков серого
SEN0212 TCS34725 Датчик цвета I2C для Arduino
SEN0245 Gravity VL53L0X Лазерный дальномер ToF
SEN0259 TF Mini LiDAR ToF Laser Range Sensor
SEN0214 Датчик тока 20А
SEN0262 Гравитационный аналоговый преобразователь тока в напряжение для приложений 4 ~ 20 мА
SEN0291 Gravity: Цифровой ваттметр I2C
DFR0027 Цифровой датчик вибрации DFRobot V2
DFR0028 DFRobot Датчик наклона
DFR0029 Цифровая кнопка DFRobot
DFR0030 DFRobot емкостный датчик касания
Модуль цифрового зуммера DFR0032
DFR0033 Цифровой магнитный датчик
DFR0034 Аналоговый звуковой датчик
SEN0038 Колесные энкодеры для DFRobot 3PA и 4WD Rovers
DFR0051 Аналоговый делитель напряжения
DFR0052 Аналоговый пьезодисковый датчик вибрации
DFR0076 Датчик пламени
DFR0053 Аналоговый датчик положения ползуна
DFR0054 Аналоговый датчик вращения V1
DFR0058 Аналоговый датчик вращения V2
Модуль джойстика DFR0061 для Arduino
DFR0075 AD Клавиатурный модуль
Модуль вентилятора DFR0332
SEN0177 PM2.
5 лазерный датчик пылиМодуль датчика веса SEN0160
SEN0170 Тип напряжения датчика скорости ветра 0-5 В
TOY0048 Высокоточный двухосевой датчик инклинометра, совместимый с Arduino Gadgeteer
SEN0187 RGB и датчик жестов
SEN0186 Метеостанция с анемометром Флюгер Дождь ведро
SEN0192 Датчик микроволн
SEN0185 датчик Холла
FIT0449 DFRobot Speaker v1.0
Датчик частоты сердечных сокращений SEN0203
DFR0423 Самоблокирующийся переключатель
SEN0213 Датчик монитора сердечного ритма
SEN0221 Датчик угла Холла силы тяжести
SEN0223 Датчик переключателя проводимости
SEN0230 Инкрементальный фотоэлектрический датчик угла поворота — 400P R
SEN0235 Модуль поворотного энкодера EC11
SEN0240 Аналоговый датчик ЭМГ от OYMotion
SEN0232 Гравитационный аналоговый измеритель уровня звука
SEN0233 Монитор качества воздуха PM 2.
5, формальдегид, датчик температуры и влажностиDFR0515 FireBeetle Covers-OSD Модуль наложения символов
SEN0257 Датчик гравитационного давления воды
SEN0289 Gravity: Цифровой датчик встряхивания
SEN0290 Gravity: Датчик молнии
DFR0271 GMR Плата
ROB0003 Pirate 4WD Мобильная платформа
Мобильная платформа ROB0005 Turtle 2WD
ROB0025 NEW A4WD Мобильный робот с кодировщиком
ROB0050 4WD MiniQ Полный комплект
ROB0111 4WD MiniQ Cherokey
ROB0036 Комплект роботизированной руки с 6 степенями свободы
Комплект наклонно-поворотного устройства FIT0045 DF05BB
ROB0102 Мобильная платформа Cherokey 4WD
ROB0117 Базовый комплект для Cherokey 4WD
ROB0022 4WD Мобильная платформа
ROB0118 Базовый комплект для Turtle 2WD
Робот-комплект ROB0080 Hexapod
ROB0112 Мобильная платформа Devastator Tank
ROB0114 Мобильная платформа Devastator Tank
ROB0124 Мобильная платформа HCR с всенаправленными колесами
ROB0128 Devastator Tank Мобильная платформа Металлический мотор-редуктор постоянного тока
ROB0137 Explorer MAX Робот
ROB0139 Робот FlameWheel
DFR0270 Accessory Shield для Arduino
DFR0019 Щит для прототипирования для Arduino
DFR0265 IO Expansion Shield для Arduino V7
DFR0210 Пчелиный щит
DFR0165 Mega IO Expansion Shield V2.
3DFR0312 Плата расширения Raspberry Pi GPIO
DFR0311 Raspberry Pi встречает Arduino Shield
DFR0327 Arduino Shield для Raspberry Pi 2B и 3B
DFR0371 Экран расширения ввода-вывода для Bluno M3
DFR0356 Bluno Beetle Shield (Щит из жука Блуно)
DFR0412 Gravity IO Expansion Shield для DFRduino M0
DFR0375 Cookie I O Expansion Shield V2
DFR0334 GPIO Shield для Arduino V1.0
DFR0502 Gravity IO Expansion & Motor Driver Shield V1.1
DFR0518 Micro Mate — мини-плата расширения для микробита
DFR0578 Gravity I O Expansion Shield для OpenMV Cam M7
DFR0577 Gravity I O Expansion Shield для Pyboard
DFR0626 MCP23017 Модуль расширения с IIC на 16 цифровых IO
DFR0287 LCD12864 Экран
DFR0009 Экран ЖК-клавиатуры для Arduino
DFR0063 I2C TWI LCD1602 Модуль Gadgeteer-совместимый
Модуль DFR0154 I2C TWI LCD2004, совместимый с Arduino Gadgeteer
Светодиодная матрица DFR0202 RGB
DFR0090 3-проводной светодиодный модуль
TOY0005 OLED 2828 модуль цветного дисплея.
Совместимость с NET GadgeteerМодуль дисплея TOY0006 OLED 9664 RGB
Модуль дисплея TOY0007 OLED 2864
FIT0328 2.7 OLED 12864 дисплейный модуль
DFR0091 3-проводной последовательный ЖК-модуль, совместимый с Arduino
DFR0347 2.8 TFT Touch Shield с 4 МБ флэш-памяти для Arduino и mbed
DFR0348 3.5 TFT Touch Shield с 4 МБ флэш-памяти для Arduino и mbed
DFR0374 Экран LCD клавиатуры V2.0
DFR0382 Экран со светодиодной клавиатурой V1.0
DFR0387 TELEMATICS 3.5 TFT сенсорный ЖК-экран
DFR0459 Светодиодная матрица RGB 8×8
DFR0460 Светодиодная матрица RGB 64×32 — шаг 4 мм / Гибкая светодиодная матрица 64×32 — Шаг 4 мм / Гибкая светодиодная матрица 64×32 — Шаг 5 мм
DFR0461 Гибкая светодиодная матрица 8×8 RGB Gravity
DFR0462 Gravity Гибкая светодиодная матрица 8×32 RGB
DFR0463 Gravity Гибкая светодиодная матрица 16×16 RGB
DFR0471 Светодиодная матрица RGB 32×16 — шаг 6 мм
DFR0472 Светодиодная матрица RGB 32×32 — шаг 4 мм
DFR0464 Gravity I2C 16×2 ЖК-дисплей Arduino с подсветкой RGB
DFR0499 Светодиодная матрица RGB 64×64 — шаг 3 мм
DFR0506 7-дюймовый дисплей HDMI с емкостным сенсорным экраном
DFR0555 \ DF0556 \ DFR0557 Gravity I2C LCD1602 Модуль ЖК-дисплея Arduino
DFR0529 2.
2-дюймовый ЖК-дисплей TFT V1.0 (интерфейс SPI)DFR0605 Gravity: Цифровой светодиодный модуль RGB
FIT0352 Цифровая светодиодная водонепроницаемая лента с RGB-подсветкой 60LED м * 3 м
DFR0645-G DFR0645-R 4-цифровой светодиодный сегментный модуль дисплея
Артикул DFR0646-G DFR0646-R 8-цифровой светодиодный сегментный модуль дисплея
DFR0597 Гибкая светодиодная матрица RGB 7×71
DFR0231 Модуль NFC для Arduino
Модуль радиоданных TEL0005 APC220
TEL0023 BLUETOOH BEE
TEL0026 DF-BluetoothV3 Bluetooth-модуль
Модуль беспроводного программирования TEL0037 для Arduino
TEL0044 DFRduino GPS щит-LEA-5H
TEL0047 WiFi Shield V2.1 для Arduino
TEL0051 GPS GPRS GSM модуль V2.
0TEL0067 Wi-Fi Bee V1.0
TEL0073 BLE-Link
TEL0075 RF Shield 315 МГц
TEL0078 WIFI Shield V3 PCB Антенна
TEL0079 WIFI Shield V3 RPSMA
TEL0084 BLEmicro
TEL0086 DF-маяк EVB
TEL0087 USBBLE-LINK Bluno Адаптер для беспроводного программирования
TEL0080 UHF RFID МОДУЛЬ-USB
TEL0081 УВЧ RFID МОДУЛЬ-RS485
TEL0082 UHF RFID МОДУЛЬ-UART
TEL0083-A GPS-приемник для Arduino модели A
TEL0092 WiFi Bee-ESP8266 Wirelss модуль
Модуль GPS TEL0094 с корпусом
TEL0097 SIM808 GPS GPRS GSM Shield
DFR0342 W5500 Ethernet с материнской платой POE
DFR0015 Xbee Shield для Arduino без Xbee
TEL0107 WiFiBee-MT7681 Беспроводное программирование Arduino WiFi
TEL0089 SIM800C GSM GPRS Shield V2.
0Модуль приемника RF TEL0112 Gravity 315MHZ
Модуль GSM и GPRS TEL0113 Gravity UART A6
TEL0118 Gravity UART OBLOQ IoT Модуль
Модуль TEL0120 DFRobot BLE4.1
TEL0002 Bluetooth-адаптер
Модуль аудиоприемника Bluetooth TEL0108
TEL0124 SIM7600CE-T 4G (LTE) Shield V1.0
DFR0505 SIM7000C Arduino NB-IoT LTE GPRS Expansion Shield
DFR0013 IIC в GPIO Shield V2.0
Плата привода двигателя датчика DFR0057 — Версия 2.2
DFR0062 Адаптер WiiChuck
DFR0233 Узел датчика RS485 V1.0
DFR0259 Arduino RS485 щит
DFR0370 Экран CAN-BUS V2
DFR0627 IIC для двойного модуля UART
TEL0070 Multi USB RS232 RS485 TTL преобразователь
DFR0064 386AMP модуль аудиоусилителя
DFR0273 Экран синтеза речи
DFR0299 DFPlayer Mini
TOY0008 DFRduino Плеер MP3
SEN0197 Диктофон-ISD1820
DFR0420 Аудиозащитный экран для DFRduino M0
DFR0534 Голосовой модуль
SD2403 Модуль часов реального времени SKU TOY0020
TOY0021 SD2405 Модуль часов реального времени
DFR0151 Модуль Gravity I2C DS1307 RTC
DFR0469 Модуль Gravity I2C SD2405 RTC
DFR0316 MCP3424 18-битный канал АЦП-4 с усилителем с программируемым усилением
DFR0552 Gravity 12-битный модуль I2C DAC
DFR0553 Gravity I2C ADS1115 16-битный модуль АЦП, совместимый с Arduino и Raspberry Pi
DFR0117 Модуль хранения данных Gravity I2C EEPROM
Модуль SD DFR0071
Плата привода двигателя датчика DFR0057 — Версия 2.
2DFR0360 XSP — Программист Arduino
DFR0411 Двигатель постоянного тока Gravity 130
DFR0438 Яркий светодиодный модуль
DFR0439 Светодиодные гирлянды красочные
DFR0440 Модуль микровибрации
DFR0448 Светодиодные гирлянды, теплый белый цвет
Встроенный термопринтер DFR0503 — последовательный TTL
DFR0504 Гравитационный изолятор аналогового сигнала
DFR0520 Двойной цифровой потенциометр 100K
DFR0565 Гравитационный цифровой изолятор сигналов
DFR0563 Гравитация 3.Датчик уровня топлива литиевой батареи 7V
DFR0576 Гравитационный цифровой мультиплексор I2C с 1 по 8
DFR0117 Модуль хранения данных Gravity I2C EEPROM
DRI0001 Моторный щит Arduino L293
DRI0002 MD1.
3 2A Двухмоторный контроллерDRI0009 Моторный щит Arduino L298N
DRI0021 Драйвер двигателя постоянного тока Veyron 2x25A Brush
DRI0017 2A Моторный щит для Arduino Twin
Драйвер двигателя постоянного тока DRI0018 2x15A Lite
Микродвигатель постоянного тока FIT0450 с энкодером-SJ01
FIT0458 Микродвигатель постоянного тока с энкодером-SJ02
DFR0399 Микро-металлический мотор-редуктор постоянного тока 75 1 Вт Драйвер
DRI0039 Quad Motor Driver Shield для Arduino
DRI0040 Двойной 1.Драйвер двигателя 5A — HR8833
DRI0044 2×1.2A Драйвер двигателя постоянного тока TB6612FNG
Драйвер двигателя постоянного тока DFR0513 PPM 2x3A
DFR0523 Гравитационный цифровой перистальтический насос
DRI0027 Digital Servo Shield для Arduino
DRI0029 24-канальный сервопривод Veyron
SER0044 DSS-M15S 270 ° 15KG Металлический сервопривод DF с аналоговой обратной связью
DRI0023 Экран шагового двигателя для Arduino DRV8825
DRI0035 TMC260 Щиток драйвера шагового двигателя
DFR0105 Силовой щит
DFR0205 Силовой модуль
DFR0457 Контроллер мощности Gravity MOSFET
DFR0564 Зарядное устройство USB для 7.
Литий-полимерная батарея 4 ВDFR0535 Менеджер солнечной энергии
DFR0559 Солнечная система управления мощностью 5 В для подсолнечника
DFR0559 Менеджер солнечной энергии 5 В
DFR0580 Solar Power Manager для свинцово-кислотных аккумуляторов 12 В
DFR0222 Реле X-Board
Релейный модуль DFR0017, совместимый с Arduino
DFR0289 Релейный контроллер RLY-8-POE
DFR0290 RLY-8-RS485 8-релейный контроллер
DFR0144 Релейный экран для Arduino V2.1
DFR0473 Gravity Digital Relay Module Совместимость с Arduino и Raspberry Pi
KIT0003 EcoDuino — Комплект для автомобильных заводов
KIT0071 MiniQ Discovery Kit
KIT0098 Пакет компонентов подключаемого модуля Breadboard
Артикул DFR0748 Цветок Китти
SEN0305 Гравитация: HUSKYLENS — простой в использовании датчик машинного зрения с искусственным интеллектом
Подключение датчика к Raspberry Pi
DFR0677 ШЛЯПА ONPOWER UPS для Raspberry Pi
 0
0 5-дюймовый сенсорный TFT-экран для Raspberry Pi
5-дюймовый сенсорный TFT-экран для Raspberry Pi 0) с поддержкой Wi-Fi и Bluetooth
0) с поддержкой Wi-Fi и Bluetooth 1
1 0)
0) 0-ML8511
0-ML8511 5 лазерный датчик пыли
5 лазерный датчик пыли 5, формальдегид, датчик температуры и влажности
5, формальдегид, датчик температуры и влажности 3
3 Совместимость с NET Gadgeteer
Совместимость с NET Gadgeteer 2-дюймовый ЖК-дисплей TFT V1.0 (интерфейс SPI)
2-дюймовый ЖК-дисплей TFT V1.0 (интерфейс SPI) 0
0 0
0 2
2 3 2A Двухмоторный контроллер
3 2A Двухмоторный контроллер Литий-полимерная батарея 4 В
Литий-полимерная батарея 4 ВКонтроллер шагового двигателя | LabJack
Обзор
Шаговые двигатели
Шаговые двигатели — это бесщеточные электродвигатели постоянного тока, которые делят полный оборот на несколько дискретных «шагов» или положений, в которые может перемещаться двигатель. Это позволяет осуществлять позиционное управление двигателем, подавая ему команду на перемещение на определенное количество шагов. Чем больше шагов во вращении двигателя, тем больше определяется его разрешающая способность и то, насколько точно его движение можно контролировать. Природа шаговых двигателей позволяет использовать их в системах, где обратная связь от энкодера невозможна. Если количество шагов в одном обороте известно, двигатель можно переместить на любое желаемое расстояние, вычислив, сколько оборотов, а затем сколько шагов соответствует этому расстоянию.После выполнения такого количества шагов двигатель должен переместиться в точное правильное положение.
Это позволяет осуществлять позиционное управление двигателем, подавая ему команду на перемещение на определенное количество шагов. Чем больше шагов во вращении двигателя, тем больше определяется его разрешающая способность и то, насколько точно его движение можно контролировать. Природа шаговых двигателей позволяет использовать их в системах, где обратная связь от энкодера невозможна. Если количество шагов в одном обороте известно, двигатель можно переместить на любое желаемое расстояние, вычислив, сколько оборотов, а затем сколько шагов соответствует этому расстоянию.После выполнения такого количества шагов двигатель должен переместиться в точное правильное положение.
Шаговые двигатели обычно состоят из шестерни, которая соединена с валом двигателя и окружена множеством электромагнитов. Эти электромагниты разделены на группы, которые называются «фазами». Эти фазы чередуются по кругу вокруг шестерни. Каждый электромагнит в фазе получает питание одновременно и притягивает к себе ближайший зуб шестерни. Как только шестерня переместилась для магнитного совмещения с электромагнитами в фазе под напряжением, она фактически переместилась на один «шаг».Чтобы перейти на следующий шаг, эта фаза отключается и включается следующая фаза в последовательности. Это снова подтянет зубья шестерни к следующей фазе и повернет двигатель еще на один шаг. Поскольку каждая из этих фаз находится под напряжением независимо от других фаз, обычно каждая фаза требует своего собственного набора выводов. Программы и схемы контроллера шагового двигателя интерпретируют команду пользователя, определяющую, на сколько шагов двигатель должен двигаться, и определяют, когда подавать питание на каждую фазу соответственно.
Как только шестерня переместилась для магнитного совмещения с электромагнитами в фазе под напряжением, она фактически переместилась на один «шаг».Чтобы перейти на следующий шаг, эта фаза отключается и включается следующая фаза в последовательности. Это снова подтянет зубья шестерни к следующей фазе и повернет двигатель еще на один шаг. Поскольку каждая из этих фаз находится под напряжением независимо от других фаз, обычно каждая фаза требует своего собственного набора выводов. Программы и схемы контроллера шагового двигателя интерпретируют команду пользователя, определяющую, на сколько шагов двигатель должен двигаться, и определяют, когда подавать питание на каждую фазу соответственно.
| Обычно ссылаются на электрическую схему шагового двигателя. | Базовая схема шагового двигателя, вращающегося из-за срабатывания одной катушки. |
Униполярный Vs.
 Биполярные шаговые двигатели
Биполярные шаговые двигатели
Обычно существует два типа шаговых двигателей: униполярные и биполярные.
Самый простой тип шагового двигателя — это двухфазный униполярный шаговый двигатель. У них есть только две фазы A и B, которые чередуются вокруг металлической шестерни. Каждая фаза состоит из одной катушки и «центрального отвода» или «общего провода». Два конца катушки и центральный отвод образуют по три вывода для каждой фазы, всего шесть выводов для двух фаз.Такое расположение позволяет переключать направление магнитного полюса каждой катушки с помощью одного переключателя или двух транзисторов на катушку, чтобы определить, на каком конце катушки будет проходить ток. Это позволяет изменять направление магнитного полюса каждой катушки без необходимости реверсирования направления тока. Функцию переключения можно упростить с помощью нашей платы переключения мощности PS12DC или нашего драйвера реле LJTick, который будет полезен только для униполярных двигателей, поскольку для биполярных шаговых двигателей требуется более сложная схема.
Биполярные шаговые двигатели также имеют по одной катушке на фазу, но у них нет центрального отвода. Отсутствие центрального отвода делает так, что биполярные шаговые катушки могут менять направление своих магнитных полюсов только путем изменения направления тока в катушке. Обычно это делается с помощью одной цепи H-моста на катушку. Включая одновременно два из четырех транзисторов в H-мосте, пользователь может программно изменить направление тока и, соответственно, магнитный полюс каждой катушки.
Основы управления шаговым двигателем
Существует множество способов управления шаговыми двигателями, и передовые методы управления продолжают развиваться. Некоторые из существующих:
Если требуется более высокая точность или крутящий момент, также существуют расширенные возможности управления, которые включают в себя процессоры цифровых сигналов (DSP). Существуют также системы шаговых двигателей с замкнутым контуром управления, которые используют угловые энкодеры в качестве механизмов обратной связи, которые обеспечивают более точное управление вращением или алгоритмы «удержания» вращающегося вала. Дополнительные объяснения того, как управляются шаговые двигатели, можно найти по ссылкам в разделе для дальнейшего чтения.
Дополнительные объяснения того, как управляются шаговые двигатели, можно найти по ссылкам в разделе для дальнейшего чтения.
В этом примечании к приложению подчеркивается, что устройства LabJack могут управлять шаговыми двигателями с использованием однофазного режима полного шага (волновой привод) и полушагового режима управления посредством выполнения сценария Lua. Эти сценарии доступны в разделе примеров сценариев Lua на нашем веб-сайте или в Kipling и имеют названия unipolar_full_step.lua и unipolar_half_step.lua.
Оборудование
Для успешного подключения и эксплуатации шагового двигателя с помощью LabJack вам потребуются следующие материалы:
- Компьютер с USB, Ethernet или Wi-Fi
- LabJack T4 или T7
- PS12DC — плата переключения питания
- Униполярный шаговый двигатель
- PS12DC может обрабатывать 750 мА на канал до 28 В, поэтому подойдет большинство униполярных шаговых двигателей NEMA17. Всегда сверяйте характеристики двигателя с таблицей данных PS12DC.
- не будут работать, так как для них требуется 2 набора H-мостов, а PS12DC является только переключающим устройством верхнего плеча, поскольку он использует полевые МОП-транзисторы с каналом P-канала.
Биполярные двигатели
- PS12DC может обрабатывать 750 мА на канал до 28 В, поэтому подойдет большинство униполярных шаговых двигателей NEMA17. Всегда сверяйте характеристики двигателя с таблицей данных PS12DC.
- Блок питания
- Здесь мы будем использовать 12 В постоянного тока, но все, что не превышает номинальных значений PS12, будет работать
- Монтажные провода
Основные соединения
Сначала подключите PS12DC к LabJack, как описано в таблице данных PS12DC. Как обсуждалось выше, средний двухфазный униполярный шаговый двигатель должен иметь в общей сложности шесть выводов, с двумя концами катушки и центральным отводом для каждой фазы. Подключите два конца катушки одной из фаз к S0 и S1 на PS12DC и подключите центральный отвод катушки к GND1.Аналогичным образом подключите два конца катушки другой фазы к S2 и S3 и подключите центральный отвод второй фазы GND2. Затем подключите VS1 к VS2 и подключите GND1 к GND2. Наконец, подключите VS1 к положительной клемме источника питания 12 В и подключите GND1 к отрицательной клемме источника питания 12 В.
Наконец, подключите VS1 к положительной клемме источника питания 12 В и подключите GND1 к отрицательной клемме источника питания 12 В.
ПРИМЕЧАНИЕ: Можно использовать любую пару каналов S, которые находятся в одном блоке PS12DC, и выполнять одну и ту же операцию. Скрипты LUA по умолчанию unipolar_full_step.lua и unipolar_half_step.lua использует S0 + S1 и S4 + S5 в качестве каналов ввода-вывода, поэтому обязательно обновите сценарий LUA с помощью S-каналов вашего приложения перед его загрузкой и использованием.
Каждый из S каналов PS12DC соответствует цифровой линии ввода / вывода LabJack. Установив на соответствующей линии ввода-вывода данного S-канала высокий уровень, 12 В от источника питания будут направлены через этот S-канал. Таким образом, пользователь может программно выбрать, когда полностью подавать питание на каждый конец катушки, путем простого переключения линий ввода / вывода.S0: S7 соответствует EIO0: EIO7, а S8: S11 соответствует CIO0: CIO3.
Другой вариант схемы коммутации переключения мощности — это наш LJTick-RelayDriver. LJTRD можно подключить к LabJack с его терминалами INA / INB, подключенными к любым линиям цифрового ввода / вывода, как показано в таблице данных драйвера LJTick-Relay. Затем питание и заземление источника питания можно подключить к клеммам VR и GNDR LJTRD. Теперь, как и в PS12DC, для линий цифрового ввода / вывода можно установить высокий уровень, чтобы замкнуть твердотельный переключатель в LJTRD и направить напряжение от источника питания на соответствующую клемму RA / RB.Если концы катушки фазы подключены к этим клеммам RA и RB, LJTRD позволит пользователю решить, когда полностью включить каждую фазу. Также можно использовать любое другое твердотельное реле или транзистор с аналогичными функциями и номиналами.
Определение потенциальных клиентов
Мультиметр можно использовать для определения выводов каждой фазы как конца катушки или центрального отвода. Один из способов сделать это — измерить сопротивление между разными парами проводов.Сопротивление между двумя концевыми выводами катушки должно быть вдвое больше, чем сопротивление между концевым выводом катушки и центральным выводом. Проверив сопротивление между несколькими парами проводов, вы сможете определить, какие отводы являются центральными, а какие — концами катушки, и суметь соединить их в конфигурации, описанной выше.
Один из способов сделать это — измерить сопротивление между разными парами проводов.Сопротивление между двумя концевыми выводами катушки должно быть вдвое больше, чем сопротивление между концевым выводом катушки и центральным выводом. Проверив сопротивление между несколькими парами проводов, вы сможете определить, какие отводы являются центральными, а какие — концами катушки, и суметь соединить их в конфигурации, описанной выше.
Для управления шаговыми двигателями состояния линий цифрового ввода / вывода необходимо переключать по определенной схеме из одного из указанных выше режимов привода на высоких скоростях. Хотя эти формы сигналов могут быть созданы путем установки линий ввода / вывода непосредственно с компьютера, более эффективно использовать возможности Lua Scripting LabJack и создать гибридное приложение, в котором некоторая логика находится на главном компьютере и имеет код управления шаговым двигателем. выполняется непосредственно на устройстве серии T.Следующая функциональная блок-схема дает обзор того, как LabJack можно использовать для управления шаговыми двигателями:
После понимания на высоком уровне того, что необходимо выполнить, можно перейти к базовому рабочему процессу: подключению к устройству, настройке устройства и управлению устройством.
Подключение к LabJack
Первым шагом в большинстве приложений LabJack является открытие соединения с устройством, использующим библиотеку LJM.Это делается с помощью функции LJM_Open, которой можно передать тип устройства, идентификатор, представляющий серийный номер или IP-адрес устройства, и тип соединения для открытия определенного устройства. Функцию open также можно вызвать с помощью LJM_Open (LJM_dtANY, LJM_ctANY, LJM_idANY, …), и она откроет любое подключенное устройство. После открытия соединения с устройством функция open вернет дескриптор, который затем можно использовать для чтения или записи на устройство LabJack для тела приложения.После завершения тела приложения рекомендуется закрыть соединение с устройством с помощью функции LJM_Close. Подробнее о подключении к устройству LabJack см. LJM — Открытие и закрытие.
Настройка LabJack для управления шаговым двигателем
Чтобы настроить LabJack в качестве контроллера униполярного шагового двигателя, сначала загрузите и запустите один из сценариев LUA, unipolar_full_step. lua или unipolar_half_step.lua (исходный код можно найти в разделе примеров сценариев Lua на нашем веб-сайте) на LabJack и сохраните его. скрипт по умолчанию при включении.Для руководства по загрузке и сохранению сценария LUA в LabJack см. Учебное пособие по автономному сценарию Lua. Сценарии также могут быть загружены через внешнюю программу, как это можно увидеть в примере Python, найденном здесь, и в примерах LabVIEW, обсуждаемых ниже. Эти сценарии lua объявляют каналы FIO из приведенного выше руководства по подключению, а затем определяют массивы, которые определяют порядок, в котором концевые выводы катушки должны быть запитаны, чтобы успешно переместить двигатель на желаемое количество шагов в режиме полного или полушага.Затем сценарий LUA объявляет следующие регистры USER_RAM, которые могут быть изменены внешними программами для управления двигателем:
lua или unipolar_half_step.lua (исходный код можно найти в разделе примеров сценариев Lua на нашем веб-сайте) на LabJack и сохраните его. скрипт по умолчанию при включении.Для руководства по загрузке и сохранению сценария LUA в LabJack см. Учебное пособие по автономному сценарию Lua. Сценарии также могут быть загружены через внешнюю программу, как это можно увидеть в примере Python, найденном здесь, и в примерах LabVIEW, обсуждаемых ниже. Эти сценарии lua объявляют каналы FIO из приведенного выше руководства по подключению, а затем определяют массивы, которые определяют порядок, в котором концевые выводы катушки должны быть запитаны, чтобы успешно переместить двигатель на желаемое количество шагов в режиме полного или полушага.Затем сценарий LUA объявляет следующие регистры USER_RAM, которые могут быть изменены внешними программами для управления двигателем:
- USER_RAM1_I32 (46080): целевая позиция (шаги)
- USER_RAM2_I32 (46082): Текущая позиция (шаги)
- USER_RAM0_U16 (46180): включить (1 = включить, 0 = отключить)
- USER_RAM1_U16 (46181): eStop (1 = eStop, 0 = запустить)
- USER_RAM2_U16 (46182): положение удержания (1 = заблокировать положение двигателя, 0 = разблокировать двигатель после текущего перемещения)
- USER_RAM3_U16 (46183): Установить исходное положение (1 = устанавливает текущую позицию как позицию нулевого шага)
После понимания основных сценариев можно разработать расширенные сценарии, реализующие более сложные приложения, такие как:
- При использовании ротационного двигателя можно отслеживать положение по градусам.
- Если шаговый двигатель управляет линейным суппортом, положение можно отследить по расстоянию.
- Переместите двигатель на полную скорость в одном направлении.

Psuedocode
управления шаговым двигателем
После того, как шаговый двигатель правильно подключен и один из сценариев LUA конфигурации был загружен в LabJack, приложение внешнего управления может читать и записывать из регистров USER_RAM, чтобы отслеживать и управлять работой. Псевдокод для базового управления двигателем для перемещения на 200 шагов можно увидеть ниже:
ручка = ljm.openS («ЛЮБОЙ,» ЛЮБОЙ «,» ЛЮБОЙ «)
target_position = 200
ljm.eWriteAddress (handle, 46183,0,1) // Сигнал для установки дома
ljm.eWriteAddress (handle, 46182,0,0) // Не держите двигатель для стендовых испытаний, так как он выделяет много тепла
ljm.eWriteAddress (handle, 46080,2, target_position) // Записываем новую целевую позицию
ljm.eWriteAddress (handle, 46180,0,1) // Включить движение двигателя
// Дождаться, пока двигатель достигнет пункта назначения (включение автоматически выключится в пункте назначения)
wait = true
при ожидании:
wait = ljm. eReadAddress (дескриптор, 46180,0) == 1
eReadAddress (дескриптор, 46180,0) == 1
Чтобы упростить начало работы с шаговыми двигателями, мы разработали приложение LabVIEW, которое загружает правильный сценарий .lua на устройство серии T после редактирования требуемых строк ввода-вывода, которые необходимо контролировать, и выбора между сценарием полного шага а также скрипт полушага. Приложение доступно в формате «.exe» (ссылка на него находится внизу страницы и здесь) и будет запускаться после загрузки и установки нашей библиотеки Windows LJM и предоставления ей возможности установить LabVIEW 7.1 рабочий движок. Если требуется пример кроссплатформенности, у нас также есть пример Python, который можно загрузить и использовать, который опубликован в разделе Примеры сценариев Lua на нашем веб-сайте.
Подключение к устройству и настройка устройства:
Загрузить и запустить последовательность шагов
Примеры LabVIEW Уведомление:
Этот пример представляет собой .exe нашего «приложения-контроллера шагового двигателя», доступного для загрузки на нашей веб-странице LabVIEW для LJM и использующего шаблон проектирования производитель-потребитель. Более простой пример «StepperController.vi», а также более исчерпывающий пример «stepper-controller-with-reads.vi» можно найти в папке:
Более простой пример «StepperController.vi», а также более исчерпывающий пример «stepper-controller-with-reads.vi» можно найти в папке:
LabVIEW_LJM / Примеры / Подробнее / Примечания по приложениям / Stepper-motor-control
Большинство функций устройств серии T можно использовать с помощью «Write Read Loop with Config.vi». Предполагая, что один из сценариев конфигурации LUA уже загружен в LabJack, базовое управление двигателем может быть выполнено в этом примере с использованием регистров, указанных выше в разделе «Настройка LabJack для управления шаговым двигателем».Этот пример может находиться в папке:
LabVIEW_LJM / Примеры / Основы
Драйвер шагового двигателя — Полное объяснение
В этой статье мы попытаемся объяснить все важные вещи о драйвере шагового двигателя , которые вам необходимо знать.
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это электронное устройство, которое используется для привода шагового двигателя. Сам по себе он обычно ничего не делает и должен использоваться вместе с таким контроллером, как PoKeys57CNC.
Сам по себе он обычно ничего не делает и должен использоваться вместе с таким контроллером, как PoKeys57CNC.
Существует множество различных типов драйверов шаговых двигателей, но в целом все они делают одно и то же — перемещают шаговые двигатели.
Нужен ли драйвер для шагового двигателя?
Да. Шаговым двигателям требуются напряжения и / или токи, которые контроллер просто не может произвести. Поэтому нам нужно использовать драйвер шагового двигателя. Это электронное устройство преобразует наши инструкции по перемещению от контроллера в последовательность, в которой обмотка в шаговом двигателе будет включаться или выключаться, при этом обеспечивая ему достаточную мощность.
Все это мы, конечно, производим с помощью микроконтроллера, управляющего несколькими полевыми транзисторами, но проектирование и программирование потребуют времени. К счастью, есть уже существующие решения.
Если подвести итог, контроллеры в целом представляют собой чисто цифровые устройства с малой выходной мощностью, поэтому мы используем аналоговый силовой каскад в качестве интерфейса между цифровым (контроллер) и механическим (двигатель) миром.
Как работают драйверы шагового двигателя?
Основная задача драйвера — сформировать соответствующий сигнал из входных данных для перемещения оси двигателя.Самый распространенный подход к управлению шаговым двигателем мы называем Н-мостом. Н-мостовые схемы состоят из 4 полевых транзисторов с очень низким сопротивлением между стоком и истоком (R DSon ) в активном состоянии. В общем, нам нужно как минимум два H-образных моста, так как у двигателя минимум две катушки. С помощью правильной комбинации сигналов на затворе полевого транзистора мы контролируем направление тока через катушку двигателя. Переменное возбуждение двух обмоток вызывает смещение оси двигателя.
Прямое и обратное движение катушки
Как выбрать драйвер шагового двигателя?
При выборе правильного драйвера для нашей системы нам сначала нужна информация о двигателях, которые мы будем использовать.Это основная важная информация. Мы должны выбрать драйвер в соответствии с мощностью шагового драйвера, который может поставлять двигатель.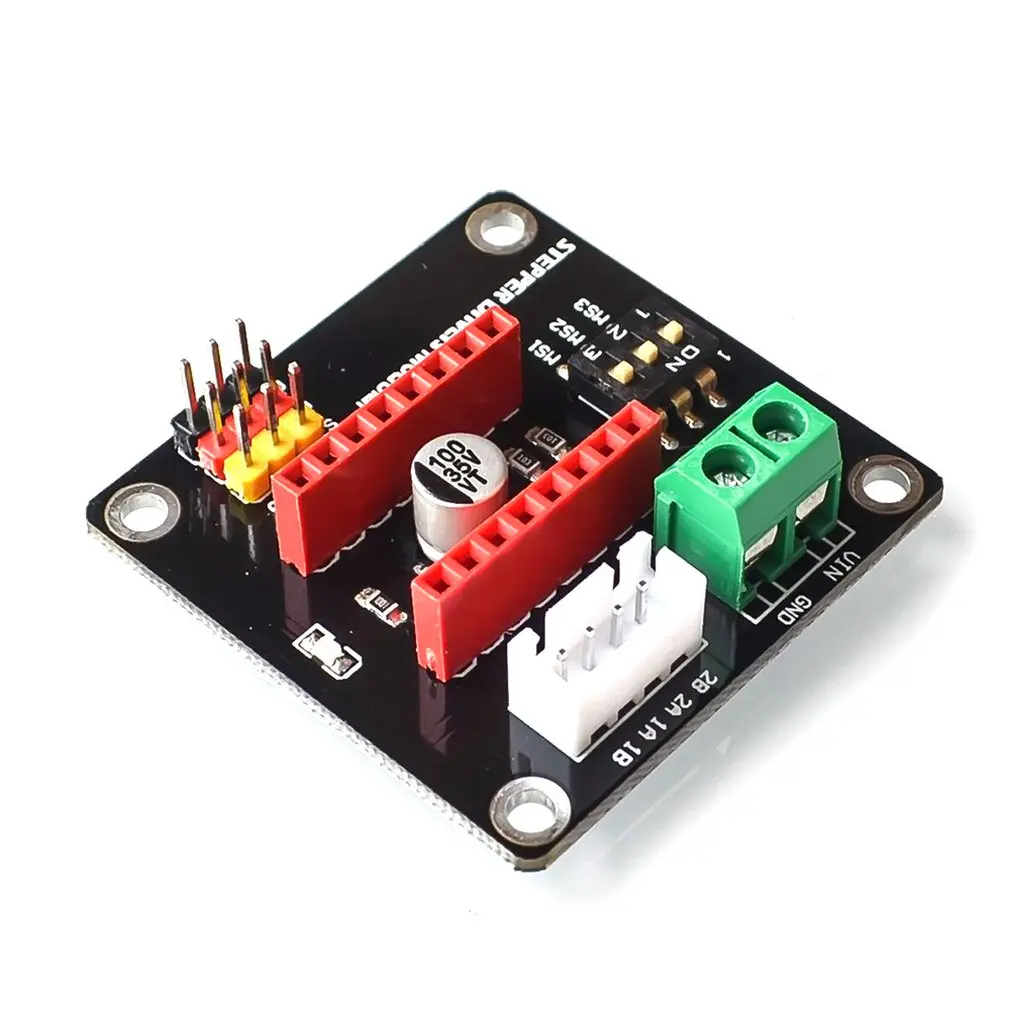 Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой амперной характеристикой.
Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой амперной характеристикой.
Следующее, что нужно рассмотреть, это то, как и что мы хотим контролировать в драйвере. Обычно есть настройки на максимальный ток и микрошаги, о которых мы напишем в отдельной главе этой статьи.У нас может быть возможность настроить драйвер с перемычками или более сложное программное обеспечение, которое в большинстве случаев позволяет пользователю настраивать также другие специальные параметры, такие как параметры затухания, ограничение температуры защиты, ток холостого хода и так далее.
Некоторые драйверы мы можем использовать только с контроллером, который генерирует сигналы шага и направления. С другой стороны, мы можем использовать разные протоколы связи.
Типы драйверов
Как правило, существует два типа драйверов. Драйверы постоянного напряжения (драйверы L / R) и драйверы постоянного тока (драйверы прерывателя).
Драйверы постоянного напряжения (драйверы L / R) и драйверы постоянного тока (драйверы прерывателя).
- Драйверы постоянного напряжения
- (драйверы L / R):
- они дешевле драйверов постоянного тока
- использовать напряжение для создания крутящего момента
- обычно неэффективен
- производительность хуже, чем драйверы чоппера
- драйверы постоянного тока (драйверы прерывателя):
- дороже
- более сложные схемы
- использовать постоянный ток для создания крутящего момента
- намного лучшая производительность, чем драйверы L / R
Драйверы постоянного тока используются почти всегда, поскольку существует множество доступных ИС, обеспечивающих гораздо лучшую производительность.Вы можете найти интегральные схемы, которые уже имеют встроенные полевые транзисторы, они обычно предназначены для более низких токов (до пары А). Поскольку они маленькие, может возникнуть проблема с отводом тепла. Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Например, PoStep25-32 использует интегральную схему со встроенными полевыми транзисторами и может обеспечивать до 2,5 А, в отличие от PoStep60-256, который использует внешние полевые транзисторы и может обеспечивать до 6 ампер.
Микрошаговый
Шаговые двигатели двигаются с шагом, который обычно составляет 1,8 °, то есть 200 шагов на оборот. Это может быть проблемой, когда нам нужны небольшие движения. Один из вариантов — использовать какую-то передачу, но есть и другой способ — микрошаговый. Микрошаговый режим означает, что мы можем делать более 200 шагов за один оборот и, в свою очередь, иметь меньшие движения. Эта опция уже встроена в большинство микросхем и может быть настроена простым перемещением перемычки, как на PoStep25-32.
При управлении шаговыми двигателями на полных шагах выходной сигнал драйвера шагового двигателя выглядит как прямоугольный сигнал и производит грубые движения.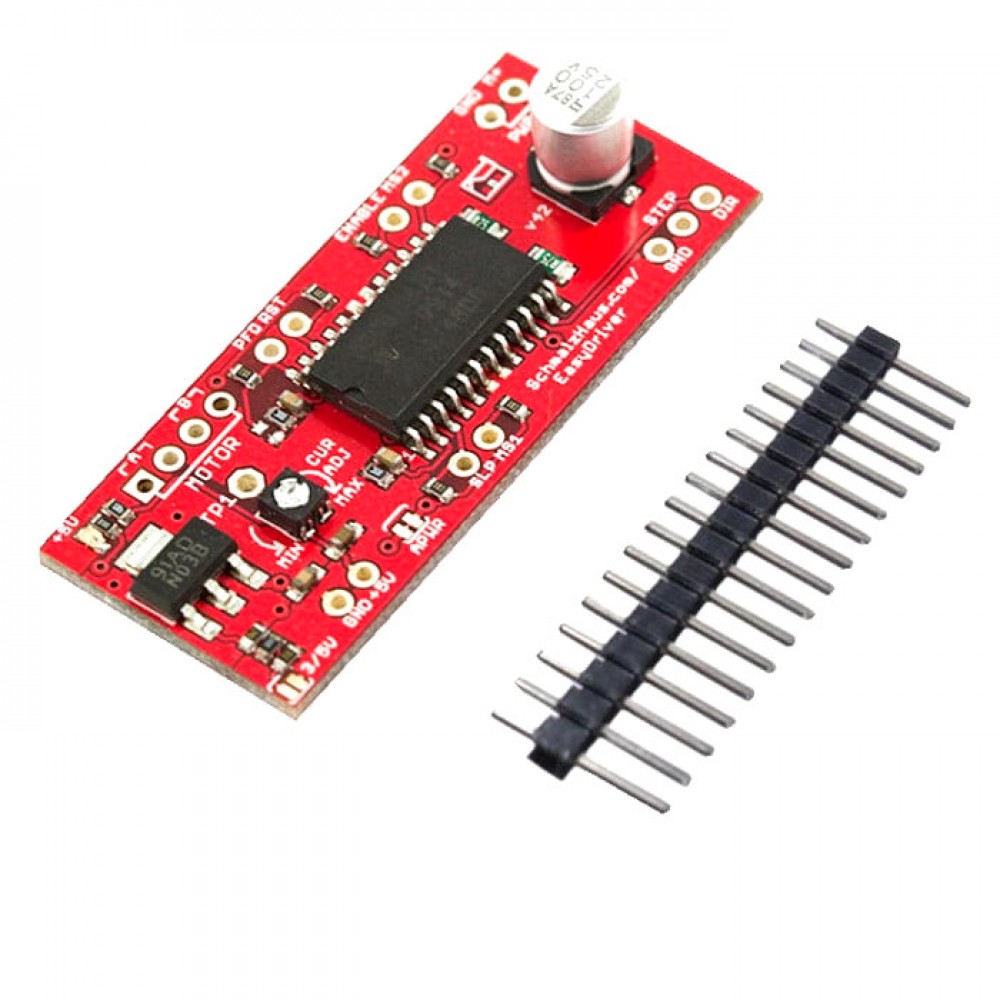 Чем больше микрошаг, тем больше выходной сигнал выглядит как синусоида, и шаговый двигатель движется более плавно. Но у этого есть обратная сторона. При увеличении значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет произвести достаточный крутящий момент, чтобы даже повернуться. Обычно 1/4, 1/8 или даже 1/16 могут обеспечивать удовлетворительное плавное движение, при этом обеспечивая достаточный крутящий момент.
Чем больше микрошаг, тем больше выходной сигнал выглядит как синусоида, и шаговый двигатель движется более плавно. Но у этого есть обратная сторона. При увеличении значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет произвести достаточный крутящий момент, чтобы даже повернуться. Обычно 1/4, 1/8 или даже 1/16 могут обеспечивать удовлетворительное плавное движение, при этом обеспечивая достаточный крутящий момент.
На следующем изображении показано, как изменяется выходной сигнал при выборе различных значений микрошага. Вы можете видеть, что выходной сигнал все больше похож на синусоидальную волну.
Так что вообще означают эти значения микрошагов?
Микрошаговый режим сообщает нам, сколько микрошагов должен сделать степпер, чтобы произвести один полный шаг. Значение 1/1 говорит нам, что шаговый двигатель должен сделать один микрошаг, чтобы произвести один полный шаг (так что микрошага нет). Значение 1/2 называется полушагом и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага.Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот. Значение 1/8 говорит нам, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошага.
Значение 1/2 называется полушагом и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага.Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот. Значение 1/8 говорит нам, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошага.
Как управлять драйвером шагового двигателя?
Большинство драйверов шаговых двигателей принимают входные сигналы шага и направления. Это означает, что нам нужно только два сигнала для каждого драйвера. Шаговый сигнал используется для создания шагов и выглядит как сигнал ШИМ.Каждый импульс означает, что шаговый двигатель будет двигаться на один шаг (или микрошаг). Сигнал направления используется для обозначения того, в каком направлении (по часовой или против часовой стрелки) будет поворачиваться шаговый двигатель. Есть приложения, в которых мы используем шаговый двигатель независимо, поэтому для управления драйвером используется стандартный протокол связи, такой как MODBUS, USB или I2C.
Конфигурация параметров драйвера
Как подключить шаговый двигатель?
, если вы исследовали шаговые двигатели, вы могли заметить, что у них другое количество соединительных проводов.Чаще всего встречаются двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами.
Заключение
Мы обнаружили, что драйвер шагового двигателя необходим, если наша конструкция требует использования шагового двигателя, поскольку контроллер не может производить достаточный ток и достаточно высокое напряжение. Существуют разные типы, но драйверы измельчителя обеспечивают лучшую производительность. Кроме того, микрошаговый режим предлагает на первый взгляд отличное решение, но создает проблему снижения крутящего момента.Он по-прежнему чрезвычайно полезен, но мы должны использовать его правильно. Существует множество различных микросхем для управления шаговым двигателем, а также множество уже разработанных решений, таких как PoStep25-32 и PoStep60-256, которые обеспечивают решение plug and play и просты в использовании.
И если вы хотите узнать больше, это отличная отправная точка.
p.s .: Статья о драйвере шагового двигателя была оптимизирована для SEO с помощью словенского SEO-фрилансера Seo-Praktik.si.
Похожие сообщения
Выпущен обновленный плагин PoKeys для Mach5
Была выпущена новая версия плагина PoKeys для Mach5…
Регистратор данных Raspberry Pi с PoKeys as …
Универсальность устройства PoKeys делает его …
Цифровой оптический изолятор | PoOptoIn 16 каналов …
Здесь вы получите некоторую основную информацию об оптических изоляторах, а также о том, как …
Драйвер двухфазного шагового двигателя 24-36VDC 0,9-3,0A Диапазон
Отличная новая цена на наш драйвер двигателя CW230, сэкономьте $ 9,00!
Драйвер шагового двигателя 24-36 В постоянного тока и 0,9-3,0 А
Наш драйвер двухфазного шагового двигателя CW320 может управлять как биполярными, так и униполярными двигателями в диапазоне 24-36 В и 0.9-3,0 ампер тока, широкий диапазон скорости и крутящего момента доступен от любого подключенного шагового двигателя. Эта схема драйвера двигателя обычно способна подавать достаточное напряжение для работы шагового двигателя с номиналом до 3 А, многие из которых вы можете найти на нашей странице с основными шаговыми двигателями или в предлагаемых элементах внизу этой страницы.
Эта схема драйвера двигателя обычно способна подавать достаточное напряжение для работы шагового двигателя с номиналом до 3 А, многие из которых вы можете найти на нашей странице с основными шаговыми двигателями или в предлагаемых элементах внизу этой страницы.
Этот драйвер имеет отличный крутящий момент на высокой скорости, он автоматически снижает выходной ток при остановке двигателя, что снижает нагрев двигателя.Содержит самотестирование, защиту от перенапряжения и перегрузки по току. Драйвер подходит для различных приложений малой автоматизации и инструментов, таких как режущие машины, упаковочные машины, этикетировочные машины, плоттеры, гравировальные станки и станки с ЧПУ, и многие другие. Он всегда хорошо работает при использовании на оборудовании, требующем низкой вибрации, низкого уровня шума, высокой точности и высокой скорости.
Технические характеристики драйвера шагового двигателя CW320
- DC Тип входного питания: 24V-36VDC
- Выходной ток: 0. 9A ~ 3.0A
- Рабочая среда: 15 ~ 40 ° C, влажность <90%
- Управление: оптоизолированный шаг / направление
- MicroStep: 1 (200), 1/2 (400), 1/4 (800), 1/8 (1600), 1/16 (3200), 1/32 (6400), 1/64 (12800)
- Размеры (мм): 115 x 72 x 32
- Вес: <300 г
 9A ~ 3.0A
9A ~ 3.0Aмин. Стоимость | Типичное рабочее значение | Макс. Стоимость | |
Напряжение (В) | 18 | 36 | 40 |
Выходной ток (A) | 0.9 | 1,5 | 3 |
Логический входной ток (мА) | 7 | 10 | 16 |
Частота отклика ступенчатого импульса (кГц) | – | – | 50 |
Длительность импульса низкого уровня (с) | 5 | – | – |
Полезные ссылки
Для получения помощи в выборе шагового двигателя см.