
Номинальные значения рабочей мощности и тока электродвигателей
Классы компонентов:
1.6.1.1.1. Модульные автоматические выключатели (ВАМ, МСВ), 1.6.5.1. Модульные контакторы, 1.6.1.2.1. Мотор-автоматы (автоматические выключатели защиты двигателей, MPCB), 1.6.1.3.1. Автоматические выключатели в литом корпусе (MCCB), 1.6.5.2. Контакторы, 1.6.5.3. Пускатели, 1.6.5.4. Реле перегрузки и аксессуары к ним, 1.12. Электродвигатели и приводная техника
Значения тока, приведенные ниже, относятся к стандартным трехфазным четырехполюсным асинхронным электродвигателям с КЗ ротором (1500 об/мин при 50 Гц, 1800 об/мин при 60 Гц). Данные значения представлены в качестве ориентира и могут варьироваться в зависимости от производителя электродвигателя и количества полюсов.
| Мощность электродвигателя | Номинальный ток электродвигателя: стандартные значения обозначены синим цветом (в соответствии с МЭК 60947-4-1, приложение G) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 220В | 230В | 240В | 380В | 400В | 415В | 440В | 500В | 660В | 690В | |
| 0,06 кВт | 0,37 | 0,35 | 0,34 | 0,21 | 0,2 | 0,19 | 0,18 | 0,16 | 0,13 | 0,12 |
| 0,09 кВт | 0,54 | 0,52 | 0,5 | 0,32 | 0,3 | 0,29 | 0,26 | 0,24 | 0,18 | 0,17 |
| 0,12 кВт | 0,73 | 0,7 | 0,67 | 0,46 | 0,44 | 0,42 | 0,39 | 0,32 | 0,24 | 0,23 |
| 0,18 кВт | 1 | 1 | 1 | 0,63 | 0,6 | 0,58 | 0,53 | 0,48 | 0,37 | 0,35 |
| 0,25 кВт | 1,6 | 1,5 | 1,4 | 0,9 | 0,85 | 0,82 | 0,74 | 0,68 | 0,51 | 0,49 |
| 0,37 кВт | 2 | 1,9 | 1,8 | 1,2 | 1,1 | 1,1 | 1 | 0,88 | 0,67 | 0,64 |
| 0,55 кВт | 2,7 | 2,6 | 2,5 | 1,6 | 1,5 | 1,4 | 1,3 | 1,2 | 0,91 | 0,87 |
| 0,75 кВт | 3,5 | 3,3 | 3,2 | 2 | 1,9 | 1,8 | 1,7 | 1,5 | 1,15 | 1,1 |
| 1,1 кВт | 4,9 | 4,7 | 4,5 | 2,8 | 2,7 | 2,6 | 2,4 | 2,2 | 1,7 | 1,6 |
| 1,5 кВт | 6,6 | 6,3 | 6 | 3,8 | 3,6 | 3,5 | 3,2 | 2,9 | 2,2 | 2,1 |
| 2,2 кВт | 8,9 | 8,5 | 8,1 | 5,2 | 4,9 | 4,7 | 4,3 | 3,9 | 2,9 | 2,8 |
| 3 кВт | 11,8 | 11,3 | 10,8 | 6,8 | 6,5 | 6,3 | 5,7 | 5,2 | 4 | 3,8 |
| 4 кВт | 15,7 | 15 | 14,4 | 8,9 | 8,5 | 8,2 | 7,4 | 6,8 | 5,1 | 4,9 |
| 5,5 кВт | 20,9 | 20 | 19,2 | 12,1 | 11,5 | 11,1 | 10,1 | 9,2 | 7 | 6,7 |
| 7,5 кВт | 28,2 | 27 | 25,9 | 16,3 | 15,5 | 14,9 | 13,6 | 12,4 | 9,3 | 8,9 |
| 11 кВт | 39,7 | 38 | 36,4 | 23,2 | 22 | 21,2 | 19,3 | 17,6 | 13,4 | 12,8 |
| 15 кВт | 53,3 | 51 | 48,9 | 30,5 | 29 | 28 | 25,4 | 23 | 17,8 | 17 |
| 18,5 кВт | 63,8 | 61 | 58,5 | 36,8 | 35 | 33,7 | 30,7 | 28 | 22 | 21 |
| 22 кВт | 75,3 | 72 | 69 | 43,2 | 41 | 39,5 | 35,9 | 33 | 25,1 | 24 |
| 30 кВт | 100 | 96 | 92 | 57,9 | 55 | 53 | 48,2 | 44 | 33,5 | 32 |
| 37 кВт | 120 | 115 | 110 | 69 | 66 | 64 | 58 | 53 | 40,8 | 39 |
| 45 кВт | 146 | 140 | 134 | 84 | 80 | 77 | 70 | 64 | 49,1 | 47 |
| 55 кВт | 177 | 169 | 162 | 102 | 97 | 93 | 85 | 78 | 59,6 | 57 |
| 75 кВт | 240 | 230 | 220 | 139 | 132 | 127 | 116 | 106 | 81 | 77 |
| 90 кВт | 291 | 278 | 266 | 168 | 160 | 154 | 140 | 128 | 97 | 93 |
| 110 кВт | 355 | 340 | 326 | 205 | 195 | 188 | 171 | 156 | 118 | 113 |
| 132 кВт | 418 | 400 | 383 | 242 | 230 | 222 | 202 | 184 | 140 | 134 |
| 160 кВт | 509 | 487 | 467 | 295 | 280 | 270 | 245 | 224 | 169 | 162 |
| 200 кВт | 637 | 609 | 584 | 368 | 350 | 337 | 307 | 280 | 212 | 203 |
| 250 кВт | 782 | 748 | 717 | 453 | 430 | 414 | 377 | 344 | 261 | 250 |
| 315 кВт | 983 | 940 | 901 | 568 | 540 | 520 | 473 | 432 | 327 | 313 |
| 355 кВт | 1109 | 1061 | 1017 | 642 | 610 | 588 | 535 | 488 | 370 | 354 |
| 400 кВт | 1255 | 1200 | 1150 | 726 | 690 | 665 | 605 | 552 | 418 | 400 |
| 500 кВт | 1545 | 1478 | 1416 | 895 | 850 | 819 | 745 | 680 | 515 | 493 |
| 560 кВт | 1727 | 1652 | 1583 | 1000 | 950 | 916 | 832 | 760 | 576 | 551 |
| 630 кВт | 1928 | 1844 | 1767 | 1116 | 1060 | 1022 | 929 | 848 | 643 | 615 |
| 710 кВт | 2164 | 2070 | 1984 | 1253 | 1190 | 1147 | 1043 | 952 | 721 | 690 |
| 800 кВт | 2446 | 2340 | 2243 | 1417 | 1346 | 1297 | 1179 | 1076 | 815 | 780 |
| 900 кВт | 2760 | 2640 | 2530 | 1598 | 1518 | 1463 | 1330 | 1214 | 920 | 880 |
| 1000 кВт | 3042 | 2910 | 2789 | 1761 | 1673 | 1613 | 1466 | 1339 | 1014 | 970 |
2.
 Допустимые значения тока холостого хода двигателей
Допустимые значения тока холостого хода двигателей
Предельно допустимые значения тока холостого хода для трехфазных асинхронных двигателей
Мощность электродвигателя, | Ток холостого хода, % (от Iном.), | |||||
при частоте вращения, об./мин. | ||||||
3000 | 1500 | 1000 | 750 | 600 | 500 | |
0,12 — 0,55 0,75 — 1,5 1,5 — 5,5 5,5 — 11 15 — 22,5 22,5 — 55 55 — 110 | 60 50 45 40 30 20 20 | 75 70 65 60 55 50 40 | 85 75 70 65 60 55 45 | 90 80 75 70 65 60 50 | 95 85 80 75 70 65 55 | — 90 85 80 75 70 60 |
Примечание: Перед измерением тока электродвигатели должны быть обкатаны, т. е. проработать без нагрузки в течение 0,5-1 часа при мощности до 100 кВт и не менее 2 часов при мощности выше 100 кВт.
е. проработать без нагрузки в течение 0,5-1 часа при мощности до 100 кВт и не менее 2 часов при мощности выше 100 кВт.
*Данные в таблице являются справочными и могут отличаться при реальных измерениях на + 10-20%.
Номинальный ток, А
Номинальный ток на который расчитаны главные контакты пускатели при категории нагрузки АС3
Таблица выбора контакторов в зависимости мощности двигателя, напряжения в сети при категории нагрузки АС3.
| Номинальный ток главных контактов | Мощность двигателям при АС3 режиме работы, при напряжении сети | ||
| 230В | 400В | 660В | |
| 6 | 1,1 кВт | 2,2 кВт | 3 кВт |
| 9 | 2,2кВт | 4 кВт | 5,5 кВт |
| 12 | 3 кВт | 5,5 кВт | 7,5 кВт |
| 18 | 4 кВт | 7,5 кВт | 10 кВт |
| 25 | 5,5 кВт | 11 кВт | 15 кВт |
| 32 | 7,5 кВт | 15 кВт | 18,5 кВт |
| 38 | 9 кВт | 18,5 кВт | 18,5 кВт |
| 40 | 11 кВт | 18,5 кВт | 22-30 кВт |
| 50 | 15 кВт | 22 кВт | 30 кВт |
| 65 | 15 кВт | 22 кВт | 22-30 кВт |
| 80 | 22 кВт | 37 кВт | 45 кВт |
| 95 | 25 кВт | 45кВт | 45 кВт |
| 120 | 37 кВт | 55кВт | 75 кВт |
| 160 | 45 кВт | 90 кВт | 90 кВт |
| 200 | 55 кВт | 110 кВт | 110 кВт |
| 250 | 75 кВт | 132 кВт | 132 кВт |
| 300 | 90 кВт | 160 кВт | 160 кВт |
Категория нагрузки
- Категория АС1 Эта категория применяется ко всем типам нагрузки по переменному току с коэффициентом мощности, равным или более 0,95 (cos? > 0,95), т.
 е. неиндуктивным и слабоиндуктивным нагрузкам.
е. неиндуктивным и слабоиндуктивным нагрузкам.
Примеры применения: лампы накаливания, ТЭНы - Категория АС3 Эта категория применяется к асинхронным двигателям с короткозамкнутым ротором с размыканием цепи во время нормальной работы двигателя. При замыкании контактор коммутирует пусковой ток, который примерно в 5 -7 раз выше номинального тока двигателя. При размыкании он отключает номинальный ток двигателя.
Примеры применения: все стандартные асинхронные двигатели с короткозамкнутым ротором (лифты, эскалаторы, ленточные конвейеры, ковшовые элеваторы, компрессоры, насосы, смесители, кондиционеры и т.д.) - Категория АС4 Эта категория распространяется на торможение противотоком и на толчковый режим асинхронных двигателей с короткозамкнутым ротором и асинхронных двигателей с фазным ротором, крановые электродвигатели. Контактор замыкает цепь на пике тока, который может быть в 5 или 7 раз выше номинального тока двигателя. При размыкании он отключает тот же самый ток при напряжении, которое тем выше, чем ниже скорость двигателя. Это напряжение может быть таким же, как и напряжение сети. Отключение цепи происходит в тяжелом режиме. Для управления работой электродвигателей на большую мощность, работающих в тяжелом режиме, используют в контакторы КТ или вакуумные контакторы, при подборе обычных магнитных пускателей, обычно используют контакторы больших номиналов, чем рекомендовано при работе АС3
 е. неиндуктивным и слабоиндуктивным нагрузкам.
е. неиндуктивным и слабоиндуктивным нагрузкам.
Расчет тока электродвигателя
Новости / Расчет тока электродвигателя
Расчет тока электродвигателя
Расчет тока электродвигателя
Расчет номинального тока трехфазного асинхронного электродвигателя
Для корректного выбора системы электрификации подъемно – транспортного механизма будь то троллейный шинопровод или кабельный подвод, необходимо знать номинальный ток электрической установки.
Ниже приведена форма расчета трехфазного асинхронного электродвигателя переменного тока:
Iн=Pн/√3*Uн*cosφн*ηн или Pн/1,73*Uн*cosφн*ηн,
где Рн — номинальная мощность электродвигателя (Вт),
Uн — номинальное напряжение электродвигателя (В),
ηн — номинальный коэффициент полезного действия двигателя,
cos φн — номинальный коэффициент мощности двигателя.
Номинальные данные электродвигателя указываются на заводской шильде или в иной технической документации, прилагаемой к электродвигателю.
Для удобства приведем пример расчета:
Необходимо определить номинальный ток трехфазного асинхронного электродвигателя переменного тока,
если Рн = 25 кВт, номинальное напряжение Uн = 380 В, номинальный коэффициент
полезного действия ηн = 0,9, номинальный коэффициент мощности cos
φн = 0,8.
Номинальное напряжение трехфазной сети 380 В — соединение обмоток двигателя по схеме «звезда».
Номинальное напряжение трехфазной сети 220 В — соединение обмоток двигателя по схеме «треугольник».
Переводим номинальную мощность из кВт в Ватты:
Pн = 25 кВт = 1000*25 = 25000 Вт
Далее:
Iн = 25000/√3*380 * 0,8 * 0,9 = 25000/1,73*380*0,8*0,9 = 52,8 А.
Поделиться ссылкой:
- Рекомендуем
- Комментарии
IP65 степень герметичности оборудования
IP-рейтинг (Ingress Protection Rating, входная защита) — система классификации степеней защиты оболочки электрооборудования от проникновения твёрдых предметов и воды в соответствии с международным стандартом IEC 60529 (DIN 40050, ГОСТ 14254-96).
К примеру, радиоуправление для крана F21-E1B имеет класс герметизации IP-65. Первая цифра означ…
МЕДЬ и МЕДНЫЙ ПРОКАТ
Марки меди и их химический состав определен в ГОСТ 859-2001. Сокращенная информация о марках меди приведена ниже (указано минимальное содержание меди и предельное содержание только двух примесей – кислорода и фосфора):
Сокращенная информация о марках меди приведена ниже (указано минимальное содержание меди и предельное содержание только двух примесей – кислорода и фосфора):
Марка
Медь
О2
P
Способ получения, основные примеси
М00к
99.98
0.01
-
Медные катоды:продукт электролитического рафинир…
Перевод крана на управление с пола
Перевод крана на управление с пола.
При осуществлении перевода мостовых или козловых кранов, на дистанционное управление с пола могут быть применены кабельные пульты управления либо беспородные пульты управления грузоподъемными кранами. Полный перечень операций и систем контроля крановой кабины, должны соответствовать функционалу пульта, согласно РД 24.09…
Троллейный шинопровод HFP
Троллейный шинопровод HFP
Описание
— Контактно – защищенный троллейный шинопровод HFP H предназначен для внутренней и внешней установки.
— Шинопроводы состоят из жесткого ПВХ корпуса и медных токопроводящих жил. Конструкция корпуса шинопровода и токосъемника исключают возможность перепутывания фаз.
— Токосъемники выполнены в виде скользящей, холо…
Презентация завода Uting Telecontrol
Презентация завода Uting Telecontrol
Видео презентация завода радиотехнических изделий Uting Telecontrol.
Один из крупнейших производителей промышленного радиоуправления, пультов для кранов и прочих грузоподъемных механизмов.
https://www.youtube.com/watch?v=hQiPE9z7E6Y…
Что такое ток остановки и свободный ток двигателей?
Краткий ответ
Ток останова — это максимальный ток, потребляемый 1 , когда двигатель прикладывает свой максимальный крутящий момент, либо потому, что он не может двигаться полностью, либо потому, что он больше не может ускоряться, учитывая нагрузку, под которой он находится.
Свободный ток — это ток, потребляемый, когда двигатель свободно вращается на максимальной скорости, без нагрузки 2, кроме сил трения и противо-ЭДС в самом двигателе.
1: При нормальных условиях, то есть двигатель не запрашивается, переходите от максимальной скорости в одном направлении к максимальной скорости в другом .
2: Предполагается, что двигатель не приводится в движение внешними силами .
Длинный ответ
Течение сваливания
Со страницы Википедии по крутящему моменту в стойле :
Крутящий момент — это крутящий момент, который создается устройством, когда выходная скорость вращения равна нулю. Это также может означать моментную нагрузку, которая приводит к тому, что выходная частота вращения устройства становится равной нулю, то есть вызывает останов .
 Задержка — это состояние, когда двигатель перестает вращаться. Это условие возникает, когда крутящий момент нагрузки больше, чем крутящий момент на валу двигателя, т.е. В этом состоянии двигатель потребляет максимальный ток, но двигатель не вращается. Ток называется током останова.
Задержка — это состояние, когда двигатель перестает вращаться. Это условие возникает, когда крутящий момент нагрузки больше, чем крутящий момент на валу двигателя, т.е. В этом состоянии двигатель потребляет максимальный ток, но двигатель не вращается. Ток называется током останова.…
Электродвигатели
Электродвигатели продолжают обеспечивать крутящий момент в остановленном состоянии. Однако электродвигатели, оставленные в остановленном состоянии, подвержены перегреву и возможному повреждению, поскольку протекающий ток максимален в этих условиях.
Максимальный крутящий момент, который электродвигатель может создать в долгосрочной перспективе при остановке, не причиняя ущерба, называется максимальным непрерывным моментом останова .
Таким образом, из спецификации этого двигателя
Stall Torque: 8.6 in-lbs
Stall Current: 2.6 A
мы можем видеть, что если требуется, чтобы двигатель прикладывал крутящий момент более 8,6 фунт-силы, двигатель прекращает движение (или ускоряется при работе против трения) и потребляет максимум 2,6А тока.
Хотя он не говорит, что это за двигатель, я ожидал, что это будет электродвигатель с щеткой постоянного тока, учитывая его двухпроводный интерфейс.
Когда электродвигатель постоянного тока без нагрузки вращается, он генерирует электродвижущую силу в обратном направлении, которая противостоит току, приложенному к двигателю. Ток, проходящий через двигатель, падает с увеличением скорости вращения, и у двигателя с вращающимся свободным током ток очень мал. Только когда нагрузка на двигатель замедляет ротор, ток, протекающий через двигатель, увеличивается.
Со страницы Википедии «Противоэлектродвижущая сила» :
В управлении двигателем и робототехнике термин «обратная ЭДС» часто относится к использованию напряжения, генерируемого вращающимся двигателем, для определения скорости вращения двигателя.

Обратите внимание, что, как объясняет DrFriedParts , это только часть истории. Максимальный непрерывный пусковой момент может быть значительно ниже , чем максимальный крутящий момент и , следовательно , тока. Например, если вы переключаетесь с полного крутящего момента в одном направлении на полный крутящий момент в другом. В этом случае потребляемый ток может быть удвоенным непрерывным током срыва. Делайте это достаточно часто, превышая рабочий цикл двигателя, и вы можете перегореть.
Свободный ток
Опять же, глядя на спецификации:
Free Speed: 100 rpm
Free Current: 0.18 A
Поэтому, когда он работает свободно, без нагрузки, он быстро разгоняется до 100 оборотов в минуту, где он набирает всего 180 мА, чтобы поддерживать эту скорость с учетом трения и противо-ЭДС.
Однако, как объясняет DrFriedParts , это тоже только часть истории. Если двигатель приводится в действие внешней силой (фактически нагрузкой), и, таким образом, двигатель превращается в генератор, потребляемый ток может быть нейтрализован током, создаваемым внешней силой.
Асинхронный двигатель и двигатель постоянного тока, чем они отличаются
Асинхронный двигатель и двигатель постоянного тока, чем они отличаются
Двигатель — устройство, преобразующее какой-либо вид энергии в механическую работу
Асинхронные двигатели — это двигатели, в процессе работы которых под нагрузкой наблюдается явление скольжения, то есть «отставание» вращения ротора от вращения магнитного поля статора. Другими словами, вращение ротора происходит не синхронно с вращением намагниченности статора, а асинхронно по отношению к этому движению. Вот почему такого рода двигатели называются асинхронными (не синхронными) двигателями.
В большинстве случаев, произнося словосочетание «асинхронный двигатель», имеют ввиду именно бесколлекторный двигатель переменного тока. Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Если мы имеем дело с обычным двигателем переменного тока, наподобие АИР712А, то при синхронной частоте вращения магнитного поля в 3000 оборотов в минуту, в условиях номинальной механической нагрузки на валу в 750 ватт, мы будем иметь реальную частоту вращения 2840 оборотов в минуту, а значит величина скольжения составит 0,053.
Это нормальное явление для асинхронного двигателя. И на справочной табличке мы не увидим круглых цифр оборотов, вроде 3000 или 1500, вместо них там будет указано 2730 или 1325. Вместо 1000 может быть написано например 860, несмотря на то, что магнитное поле во время работы двигателя вращается с частотой 1000 оборотов в минуту, как и должно быть в электрической машине с 3 парами магнитных полюсов, предназначенной для питания переменным током частотой 50 Гц.
Что касается двигателей постоянного тока, то в большинстве случаев так называют коллекторные двигатели, на скорость вращения ротора у которых влияет не частота тока, а его средняя величина. Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
На роторе двигателя постоянного тока может располагаться многосекционная обмотка возбуждения или постоянные магниты. Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Так или иначе, асинхронный бесколлекторный двигатель имеет мощную рабочую обмотку на статоре, которая в процессе работы разогревается от прохождения по ней рабочего тока, и передает тепло на корпус двигателя. Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
В связи с этой особенностью, большинство асинхронных двигателей по умолчанию имеют на своих валах крыльчатки вентиляторов, а на корпусах — выступы, вдоль которых вентилятор, как через радиатор, гонит свежий воздух, охлаждая таким образом статор. Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
В двигателях постоянного тока, с коллекторно-щеточными узлами и с многосекционными многовитковыми обмотками на якарях, выведенными на ламели коллектора, в качестве рабочих обмоток выступают — и обмотка статора, и обмотка ротора (якоря).
Здесь фактически получается, что рабочая обмотка как-бы разделена на две части: рабочий ток идет и через якорную обмотку, и через статорную обмотку, поэтому проблема нагрева только статора отсутствует, и вентилятор здесь не нужен.
Для охлаждения достаточно вентиляционных отверстий, через которые можно разглядеть ротор с якорной обмоткой на нем. Поэтому, если перед вами двигатель с коллекторно-щеточным узлом, где коллектор имеет множество ламелей (блестящих пластинок) с выводами от обмоток, и вентилятора словно бы и не предусмотрено — перед вами двигатель постоянного тока.
Статор двигателя постоянного тока может представлять собой набор постоянных магнитов. Большинство двигателей постоянного тока, рассчитанных на сетевое напряжение, будут легко работать и от переменного тока (пример такого универсального мотора — мотор болгарки).
Ранее ЭлектроВести писали, что с 7 по 17 марта 2019 года в выставочном центре Palexpo состоится Женевский автосалон. Всего ожидается свыше 100 мировых и европейских премьер!
По материалам: electrik.info.
Пример расчета тока кз с учетом подпитки двигателей 6 кВ
В данном примере требуется определить ток в месте к.з с учетом подпитки от синхронных электродвигателей для схемы электроснабжения 6 кВ представленной ниже.
Обращаю ваше внимание, что ток к.з. в данном примере рассчитывается, когда РПН силового трансформатора ТДН, находиться в среднем положении, крайние положения РПН: «минусовой» и «плюсовой» — не рассматриваются.
Исходные данные:
1. Iкз. = 10 кА –ток к.з. на шинах 110 кВ;
2. Характеристики трансформатора ТДН-16000/110-У1:
- Sном.тр. = 16 МВА – номинальная мощность трансформатора;
- Uном.вн =115 кВ — номинальное напряжение стороны ВН;
- Uном.нн = 6,3 кВ — номинальное напряжение стороны НН;
- Uк.вн-нн=10,5 % — напряжение короткого замыкания трансформатора, соответствующее среднему положению РПН, принимается по таблице 6 ГОСТ 12965-85;
3. Характеристики синхронных двигателей серии СТД представлены в таблице 3.10.14 [Л3, с.565]:
В таблице 3.10.14 кратность пускового тока обозначено как Iп/Iном., в технической литературе обозначено как kп. В дальнейшем, чтобы не запутаться, кратность пускового тока будет приводиться как в формулах технической литературы, а именно – kп.
- kп = 5,58 – кратность пускового тока для двигателя СТД-800-23УХЛ4;
- kп = 6,7 – кратность пускового тока для двигателя СТД-1000-23УХЛ4;
- Sном = 935 кВА = 0,935 МВА– для двигателя СТД-800-23УХЛ4;
- Sном = 1160 кВА = 1,160 МВА– для двигателя СТД-1000-23УХЛ4;
Если же в паспорте не указано Sном, можно рассчитать по формуле: Sном = Pном/cosφ.
Решение
Составляем расчетную схему и схему замещения (см.рис.1 а, б), учитывая из всех присоединений 6,3 кВ, только синхронные двигатели, непосредственно связанные с местом к.з. (точка К1). Связано это с тем, что электродвигатели напряжением выше 1000 В являются дополнительным генерирующим источником при условии, если они связаны с местом к. з. непосредственно, кабельными линиями, токопроводами или через линейные реакторы [Л1, с.19].
з. непосредственно, кабельными линиями, токопроводами или через линейные реакторы [Л1, с.19].
Определяем сопротивления элементов схемы замещения.
1. Определяем сопротивление для энергосистемы на напряжение 115 кВ, по выражению 54 [Л1, с.43]:
2. Определяем сопротивление двухобмоточного трансформатора в среднем положении РПН по выражению 25 [Л2, с.27]:
где:
- Uк = 10,5% — напряжение короткого замыкания трансформатора, %;
- Uном = 115 кВ – номинальное напряжение трансформатора в среднем положении РПН, кВ;
- Sном = 16000 кВА – номинальная мощность трансформатора, кВА;
3. Определяем сверхпереходное сопротивление для электродвигателя серии СТД-800 в относительных единицах (о.е) по выражению 13 [Л4, с.15]:
4. Определяем сверхпереходное сопротивление для электродвигателя серии СТД-1000 в относительных единицах (о.е) по выражению 13 [Л4, с.15]:
5. Переведем значение сверхпереходного сопротивления электродвигателей из относительных единиц в Ом, по выражению 8 [Л4, с.11]:
Подробно расчет сопротивлений синхронных электродвигателей выше 1000 В рассмотрен в статье: «Расчет сопротивлений электродвигателей выше 1000 В» .
6. Определяем суммарное сопротивление электродвигателей для II секции. Как видно из схемы замещения (см. рис.1б) сопротивления xдв1 и xдв2 соединены параллельно. Для 2-х параллельных ветвей сложение ветвей выполняется по выражению 23 [Л4, с. 23]:
Основные формулы преобразования схем представлены в таблице 3.1 РД 153-34.0-20.527-98.
7. Если кратность пускового тока электродвигателя вам неизвестна, тогда сверхпереходное сопротивление Х”d* определяется по таблице 5.2 [Л4, с.14 — 15].
Для сравнения результатов расчетов, определим сопротивление электродвигателей на II секции, приняв что Х”d* = 0,2 о.е:
где: Sном.Σ = 2*0,935 + 2*1,160 = 4,19 МВА– суммарная мощность электродвигателей на секции, МВА;
Как мы видим результаты расчетов отличаются, но я бы не сказал, что уж так сильно.
8. Определяем суммарное сопротивление системы до точки к.з:
9. Определяем ток трехфазного короткого замыкания по выражению 52 [Л1, с.42]:
10. Значение тока кз приведем к действующему напряжению 6,3 кВ, согласно [Л2, с.14]:
11. Определяем сверхпереходное ЭДС выраженное в кВ по выражению 11 [Л4, с. 14]:
где: E”d* = 1,1 (о.е) — сверхпереходное ЭДС в отн. ед.ном, принимается по таблице 5.2 [Л4, с.14].
12. Определяем ток к.з. от электродвигателей по выражению 50 [Л1, с.42]. В формуле 50 сверхпереходное ЭДС обозначается как E”, в практических расчетах индекс d опускается. Поэтому во избежание путаницы из-за разного обозначения эл. величин в различной технической литературе, принимаем что E”d обозначается E”.
13. Определяем суммарный ток к.з. на секции:
Литература:
- Беляев А.В. Как рассчитать ток короткого замыкания. Учебное пособие. 1983 г.
- Расчет токов короткого замыкания в электросетях 0,4-35 кВ, Голубев М.Л. 1980 г.
- Справочная книга электрика. В.И. Григорьева. 2004 г.
- Расчеты токов короткого замыкания для релейной защиты. Учебное пособие. Часть первая. И.Л.Небрат 1996 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
Электродвигатели
— ток полной нагрузки
В качестве «практических правил» номинальную мощность в амперах можно оценить как
- 115 вольт двигатель — однофазный: 14 ампер / л.с.
- 230 вольт двигатель — однофазный: 7 ампер / л. проверьте информацию на паспортной табличке перед проектированием защитных устройств, проводки и коммутационного устройства.
Однофазные двигатели — л.с. и токи полной нагрузки
Ожидается, что двигатель данной номинальной мощности будет передавать это количество механической мощности на вал двигателя. Имейте в виду, что КПД двигателя не рассчитывается по приведенным ниже значениям для кВт и ампер.
Необходимо учитывать КПД двигателя, чтобы избежать недостаточной мощности источника питания.Мощность Ток полной нагрузки (А) (л.с.) (кВт) 115 В 208 В 230 В 1/6 0.13 4,4 2,4 2,2 1/4 0,19 5,8 3,2 2,9 1/3 0,25 7,2 4,0 3,6 1/2 0,38 9,8 5,4 4,9 3/4 0,56 13,8 7,6 6,9 1 0.75 16 8,8 8 1 1/2 1,1 20 11 10 2 1,5 24 13,2 12 3 2,3 34 18,7 17 5 3,8 56 30,8 28 Обратите внимание, что большинство электродвигателей рассчитано на работу с 50% до 100 % от номинальной нагрузки, а максимальная эффективность обычно составляет около 75% от номинальной нагрузки.Для двигателя мощностью 1 л.с. нагрузка обычно должна находиться в диапазоне от 1/2 до 1 л.с. с максимальной эффективностью при 3/4 л.с.
Типичные диапазоны нагрузок:
- Допустимые для короткого периода: 20 — 120%
- Допустимые для работы: 50 — 100%
- Оптимальный КПД: 60 — 80%
Двигатель с сервисным фактором может быть случайным быть перегруженным. Перегрузка со временем снизит КПД двигателя.
Трехфазные двигатели — л. Коэффициент
(л.с.) (кВт) 115 В 230 В 460 В 575 В 2300 В 230 В 460 В 575 В 2300 В 1/2 0. 384 2 1 0,8 3/4 0,56 5,6 2,8 1,4 1,1 1 0,75 7,2 3,6 1,8 1,4 1 1/2 1,1 10.4 5,2 2,6 2,1 2 1,5 13,6 6,8 3,4 2,7 3 9 2,3
9,6 4,8 3,9 5 3,8 15,2 7,6 6.1 7 1/2 5,6 22 11 9 10 7,5 28 14 11 15 11 42 21 17 20 15 54 27 54 27 25 19 68 34 27 53 26 21 30 23 80 40 32 63 32 26 900 40
40 30 104 52 41 83 41 33 50 38 130 65 52 104 52 42 60 45 154 77 62 16 123 61 49 12 75 56 192 96 77 20 155 78 62 15 100 75 248 124 99 26 202 101 81 20 - 1 л. с. (в лошадиных силах по английски) = 745.7 Вт = 0,746 кВт = 550 фут-фунт / с = 2545 БТЕ / ч = 33,000 фут-фунт / м = 1,0139 метрическая мощность в лошадиных силах ~ = 1,0 кВА
Двигатели постоянного тока — мощность и токи полной нагрузки
Мощность Постоянный ток (А) (л.с.) (кВт) 230 В 440 В 1/4 0,19 0,81 0.42 1/3 0,25 1,1 0,56 1/2 0,37 1,6 0,85 3/4 0,56 2,4 1,3 1 0,75 3,2 1,7 1 1/2 1,1 4,9 2,5 2 1,5 6.5 3,4 3 2,2 9,7 5,1 5 3,7 16 8,5 7 1/2 5,6 24 13 10 7,5 32 17 15 11 49 25 20 15 65 34 30 22 97 51 50 37 162 85 75 56 243 127 100 75 324 170 - для 115 В — ток в два раза больше, чем для 230 В
Входной ток в зависимости от тока двигателя, Преобразование мощности — поддержка maxon
Тема:
Иногда обсуждают, почему ток двигателя, сообщаемый контроллером двигателя, сильно отличается от тока, сообщаемого источником питания.
Это кажется удивительным для многих пользователей, особенно потому, что ток двигателя часто намного превышает входной ток контроллера двигателя.
В чем секрет этого и какое текущее значение правильное?Решение:
Силовой каскад контроллера мотора похож на силовой преобразователь или своего рода электронный трансформатор. Это означает, что вы должны сравнить входную мощность (= «Напряжение питания» x «Входной ток»), обеспечиваемую источником питания , с выходной мощностью (= «Напряжение двигателя» x «Ток двигателя»), подаваемой на двигатель от силового каскада контроллера мотора.Если вы просто сравниваете «Входной ток» и «Ток двигателя», это вводит в заблуждение и не имеет никакого значения.
Силовой каскад современных контроллеров двигателей (таких как maxon ESCON, EPOS или MAXPOS) основан на так называемом ШИМ (широтно-импульсной модуляции) регулируемом напряжении двигателя. Напряжение двигателя включается и выключается с высокой частотой (обычно 50–100 кГц) логикой контроллера двигателя. Время включения (= так называемый «рабочий цикл ШИМ») в каждом цикле ШИМ (0,01 мс в случае 100 кГц) определяет фактический текущий уровень напряжения двигателя.Результирующее напряжение двигателя может варьироваться от 0 В до почти напряжения питания в обоих направлениях. Напряжение двигателя (или рабочий цикл ШИМ) регулируется в каждом текущем цикле управления (обычно 0,1 — 0,01 мс) контроллера мотора в зависимости от требуемой в данный момент рабочей точки (т. Е. Скорости и крутящего момента) мотора. На основе уравнения мощности это означает, что ток двигателя может (и обычно будет) намного выше, чем входной ток контроллера двигателя. Причина этого в том, что постоянно адаптированное к ШИМ напряжение двигателя (в зависимости от скорости и крутящего момента) ниже фиксированного напряжения питания (батареи или источника питания).
Формула преобразования мощности:
Схема системы:
Заключение / Вывод:
- «Входной ток» контроллера мотора (= выходной ток источника питания или батареи) НЕ (!!) равен «Току мотора»!
- Входной ток контроллера мотора, сообщаемый источником питания, правильный.
- Ток двигателя, измеренный и переданный контроллером двигателя, правильный.
- Невозможно напрямую сравнить эти два значения тока
, потому что напряжение питания и напряжение двигателя различаются!
- Входной ток контроллера мотора, сообщаемый источником питания, правильный.
- Уравнение мощности рассчитывает: P Электродвигатель = P Вход — P Электроника
- Напряжение двигателя всегда ниже, чем напряжение питания.
- Напряжение двигателя постоянно изменяется с высокой частотой
и зависит от скорости и противо-ЭДС двигателя. - Ток двигателя обычно намного выше, чем ток, обеспечиваемый источником питания или аккумулятором.
Дополнительная информация:
- Обратите внимание на прилагаемый PDF-файл, содержащий эту информацию, отформатированный для распечатки.
- Ссылки на статьи:
Типовая диаграмма тока двигателя полной нагрузки
Типичная диаграмма тока двигателя полной нагрузки
Следующие
значения токов полной нагрузки типичны для двигателей, работающих на
скорости, обычные для ременных двигателей и двигателей с нормальным крутящим моментом
характеристики.Двигатели, рассчитанные на низкие скорости (1200 об / мин или меньше)
или высокие крутящие моменты могут потребовать большего рабочего тока и многоскоростного
двигатели будут иметь ток полной нагрузки, изменяющийся в зависимости от скорости. В
в этих случаях следует использовать номинальные значения тока на паспортной табличкел. с.208 Вольт 230 Вольт 460 Вольт 1/2 2.4 2,2 1,1 3/4 3,5 3,2 1,6 1 4,6 4,2 2,1 1
1/26,6 6,0 3.0 2 7,5 6,8 3,4 3 10,6 9,6 4,8 5 16,7 15,2 7,6 7
1/224.2 22 11 10 30,8 28 14 15 46,2 42 21 20 59,4 54 27 25 74.8 68 34 30 88 80 40 40 114 104 52 50 143 130 65 60 169 154 77 75 211 192 96 100 273 248 124 125 343 312 156 150 396 360 180 200 909 26 528
480 240 250 – – 302 300 – – 361 350 – – 414 400 – – 477 450 – – 515 500 – – 590 Для мощности 90 и 80 процентов
коэффициент, указанные выше цифры необходимо умножить на 1.1 и 1,25
соответственно.Позвольте нашим опытным сотрудникам по продажам помочь вам в выборе продуктов, соответствующих вашим потребностям. ЗВОНИТЕ 866-595-9616.
© 2013 KMParts.com, Inc. Все права защищены.
Понимание того, почему фазный ток двигателя отличается от тока источника питания
Обзор
В этом документе объясняется, почему ток в обмотках сервопривода отличается от тока питания шины постоянного тока.Н-мост силового каскада, подключенный к индуктивности обмотки двигателя, моделируется и анализируется во время цикла переключения ШИМ. Также обсуждается баланс механической мощности двигателя и потребляемой электроэнергии.
Понимание физики
Ток, протекающий через фазы двигателя, ниже, чем ток, протекающий через вход шины постоянного тока, поскольку сервопривод ведет себя как понижающий преобразователь постоянного тока в постоянный. Игнорируя неэффективность
и детали коммутации (см. Рисунок 1 ниже), произведение «входное напряжение * входной ток» должно быть равно произведению «выходной ток * эффективное напряжение двигателя».
Чтобы понять, почему ток источника питания отличается от тока фазы двигателя, во-первых, необходимо понять, как работает H-мост, управляющий двигателем (индуктивная нагрузка). В качестве примера мы собираемся использовать щеточный двигатель постоянного тока с двухквадрантной схемой переключения, как показано на рисунке 1:
Рисунок 1
Теперь мы проанализируем, что происходит при переключении. Транзистор BL всегда находится в состоянии 1, поэтому его можно смоделировать как короткое замыкание.Транзистор BH всегда находится в состоянии 0, поэтому его можно смоделировать как разомкнутую цепь. Транзистор AL всегда находится в состоянии 0, но его диод используется для рециркуляции тока, поэтому транзистор можно исключить, и его можно смоделировать как одиночный диод. AH является переключающим транзистором, поэтому его внутренний диод можно исключить, и его можно смоделировать как одиночный транзистор. Наконец, принимая во внимание нормальную модель двигателя, результирующая схема показана на рисунке 2.
Рисунок 2
Как видно, модель двигателя и его коммутационной сети можно упростить до DC / DC понижающего преобразователя. конвертер.Это может быть выполнено с небольшими вариациями в трехфазной сети и с любой схемой переключения.
Анализ модели
Чтобы понять, почему ток фаз двигателя может быть больше, чем входное потребление от шины постоянного тока, необходимо применить основные принципы преобразователя постоянного тока в постоянный. Ток, протекающий через понижающий преобразователь, можно разделить на две части в течение периода переключения: ток, когда транзистор активен (режим нагрузки), и ток, когда транзистор неактивен (режим 1).На рисунке 3 показан ток, протекающий в обоих случаях.
Рисунок 3
Ток всегда течет через двигатель, но только часть времени через шину постоянного тока. Поскольку двигатель является индуктивным, и поскольку ток через катушку индуктивности никогда не может мгновенно изменить свое значение, при выключении транзистора AL ток рециркулирует через диод. Ток через индуктивность определяется по формуле:
Форма волны напряжения и тока во время цикла переключения, предполагая установившийся режим и режим непрерывной проводимости (который является нормальной работой), показана на рисунке 4.
Рисунок 4
В T ON индуктивность накапливает энергию из-за положительного напряжения, поэтому ее ток увеличивается. В T OFF ток падает из-за отрицательного напряжения (равного -BEMF, если мы игнорируем сопротивление двигателя), и в результате индуктивность теряет энергию (передается двигателю и преобразуется в движение, нагрев, так далее). При измерении тока измеренное значение будет средним значением этой пульсации тока.
Теперь давайте посмотрим, почему входной ток (шина постоянного тока) может отличаться от выходного тока (фазы двигателя).
Как уже упоминалось, ток всегда течет через катушку индуктивности, но только в T ON через транзистор AH. Это означает, что средний ток не равен, а среднее значение этих токов соответствует среднеквадратичному значению или значению постоянного тока. На рисунке 5 это показано графически.
Рисунок 5
Другой способ понять это преобразование — рассматривать коммутационную сетку и катушку индуктивности как «черный ящик», который просто накапливает энергию во время T ON и сбрасывает ее во время T OFF .Принимая это во внимание, делая баланс сил, это можно понять.
Рисунок 6
На рисунке 6 входное напряжение, BEMF и выходной ток имеют фиксированные значения. Поскольку Pin = Pout должен быть равен (индуктор не может хранить энергию вечно, и должно быть достигнуто устойчивое состояние), значение входного тока будет соответствовать следующей формуле:
Если напряжение BEMF ниже, чем напряжение постоянного тока, то значение постоянного тока будет ниже, чем ток двигателя, потому что необходимо поддерживать баланс мощности.Если скорость двигателя высока, напряжение обратной электромагнитной силы (BEMF) увеличится. Для данного тока рабочий цикл ШИМ будет выше. Это означает, что ток двигателя может быть очень близок к току источника питания при максимальной скорости двигателя (максимальный рабочий цикл ШИМ).
Заключение
- Силовой каскад ведет себя как понижающий импульсный преобразователь. Эффективное напряжение, генерируемое драйвером, которое проходит через фазы двигателя, всегда равно или ниже напряжения шины постоянного тока.
- Следовательно, чтобы поддерживать баланс входной и выходной мощности, выходной ток, протекающий через фазы двигателя, должен быть выше, чем входной.
- Это усложняется с PMAC или бесщеточным постоянным током, но принципы аналогичны щеточному постоянному току.
- На низких скоростях разница между током двигателя и шины постоянного тока большая.
- При высокой СКОРОСТИ двигателя (∝ BEMF) ток двигателя и напряжение питания будут одинаковыми.
Это можно понять также с точки зрения баланса мощности.Механическая мощность двигателя — это скорость * крутящий момент, а входная мощность — это напряжение * ток.
На низких скоростях полезная механическая мощность составляет ~ 0, поэтому большая часть энергии по существу преобразуется в потери. Только при увеличении скорости увеличивается полезная мощность.
Рисунок 7
Учебное пособие по электродвигателям постоянного тока
— Расчеты электродвигателей постоянного тока без сердечника с щетками
Расчет двигателей для двигателей постоянного тока без сердечника с щеткой
При выборе бесщеточного двигателя постоянного тока без сердечника для приложения или при разработке прототипа с приводом необходимо учитывать несколько основных принципов физики двигателя, которые необходимо учитывать для создания безопасной, хорошо функционирующей и достаточно мощной прецизионной приводной системы.В этом документе мы представили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
Двигатели постоянного тока
являются преобразователями, поскольку они преобразуют электрическую энергию ( P в ) в механическую энергию ( P из ). Частное обоих членов соответствует КПД двигателя.Потери на трение и потери в меди приводят к общей потере мощности ( P потери ) в Джоулях / сек (потери в железе в двигателях постоянного тока без сердечника пренебрежимо малы). Есть дополнительные потери из-за нагрева, но мы обсудим их ниже:
В физике мощность определяется как скорость выполнения работы. Стандартная метрическая единица измерения мощности — «ватт» Вт. Как рассчитывается мощность? Для линейного движения мощность — это произведение силы и расстояния в единицу времени P = F · (d / t) .Поскольку скорость — это расстояние во времени, уравнение принимает вид P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Где:
P = Мощность, Вт
M = Крутящий момент в Нм
F = Сила, Н
d = Расстояние в м
t = Время в с
ω рад = Угловая скорость в рад / сСимвол, используемый для крутящего момента, обычно представляет собой строчную греческую букву «τ» (тау) или иногда просто букву «T» .Однако, когда он называется «Момент силы», его обычно обозначают буквой «М» .
В европейской номенклатуре
часто используется строчная буква « n » для обозначения скорости вокруг оси. Обычно « n » выражается в единицах оборотов в минуту или об / мин.
При расчете механической мощности важно учитывать единицы измерения. При вычислении мощности, если « n » (скорость) находится в мин. -1 , тогда вы должны преобразовать его в угловую скорость в единицах рад / с .Это достигается путем умножения скорости на коэффициент преобразования единиц 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить его на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Где:
n = скорость в мин -1
M = крутящий момент в мНмПредположим, что необходимо определить мощность, которую конкретный двигатель 2668W024CR должен выдавать при холодной работе с крутящим моментом 68 мНм при скорости 7 370 мин. -1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
Расчет начальной требуемой мощности часто используется в качестве предварительного шага при выборе двигателя или мотор-редуктора. Если механическая выходная мощность, необходимая для данного приложения, известна, то можно проверить максимальную или продолжительную номинальную мощность для различных двигателей, чтобы определить, какие двигатели являются возможными кандидатами для использования в данном приложении.
Ниже приведен метод определения параметров двигателя на примере двигателя постоянного тока без сердечника 2668W024CR.Сначала мы объясним более эмпирический подход, а затем проведем теоретический расчет.
Одним из часто используемых методов графического построения характеристик двигателя является использование кривых крутящего момента-скорости. Хотя использование кривых крутящий момент-скорость гораздо более распространено в технической литературе для более крупных машин постоянного тока, чем для небольших устройств без сердечника, этот метод применим в любом случае.
Обычно кривые крутящий момент-скорость генерируются путем построения графиков скорости двигателя, тока двигателя, механической выходной мощности и эффективности в зависимости от крутящего момента двигателя.Следующее обсуждение будет описывать построение набора кривых крутящего момента-скорости для типичного двигателя постоянного тока на основе серии измерений необработанных данных.
2668W024CR имеет номинальное напряжение 24 В. Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечникового двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Шаг 1. Измерьте основные параметры
Многие параметры можно получить напрямую с помощью контроллера движения, такого как один из контроллеров движения FAULHABER MC3.Большинство производителей контроллеров предлагают программное обеспечение, такое как FAULHABER Motion Manager, которое включает функцию записи трассировки, которая отображает напряжение, ток, положение, скорость и т. Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента-скорости, но это не единственный метод.
Если контроллер с функцией записи трассировки недоступен, мы также можем использовать некоторое базовое лабораторное оборудование для определения характеристик двигателя в условиях остановки, номинальной нагрузки и холостого хода. Используя источник питания, установленный на 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Теперь увеличьте крутящий момент двигателя точно до точки.
где происходит срыв. При остановке измерьте крутящий момент от
тормоз и ток двигателя. Ради этого
обсуждение, предположим, что муфта не добавляет нагрузки к
двигатель и что нагрузка от тормоза не
включают неизвестные фрикционные компоненты. Это также полезно
в этот момент, чтобы измерить оконечное сопротивление
мотор.Измерьте сопротивление, соприкоснувшись с двигателем.
клеммы с омметром. Затем раскрутите вал двигателя.
и сделайте еще одно измерение. Измерения
должны быть очень близки по стоимости. Продолжайте крутить вал
и сделайте не менее трех измерений. Это обеспечит
что измерения не проводились в точке
минимальный контакт на коммутаторе.Теперь мы измерили:
n 0 = Скорость холостого хода
I 0 = Ток холостого хода
M H = Момент остановки
R = Терминальное сопротивлениеШаг 2: Постройте график зависимости тока отКрутящий момент и скорость в зависимости от крутящего момента
Вы можете подготовить график с крутящим моментом двигателя по абсциссе (горизонтальная ось), скоростью по левой ординате (вертикальная ось) и током по правой ординате. Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величиной этому наклону является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Где:
k I = Постоянная тока
k M = Постоянная моментаДля целей данного обсуждения предполагается, что двигатель не имеет внутреннего трения.На практике момент трения двигателя M R определяется умножением постоянной крутящего момента k M двигателя на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинается не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
Где:
M R = Момент тренияШаг 3: Построение графика Power vs.Крутящий момент и эффективность в зависимости от крутящего момента
В большинстве случаев можно добавить две дополнительные вертикальные оси для построения графика зависимости мощности и эффективности от крутящего момента. Вторая вертикальная ось обычно используется для оценки эффективности, а третья вертикальная ось может использоваться для мощности. Для упрощения этого обсуждения КПД в зависимости от крутящего момента и мощность в зависимости от крутящего момента будут нанесены на тот же график, что и графики зависимости скорости от крутящего момента и тока от крутящего момента (пример показан ниже).
Составьте таблицу механической мощности двигателя в различных точках от момента холостого хода до момента остановки.Поскольку выходная механическая мощность — это просто произведение крутящего момента и скорости с поправочным коэффициентом для единиц (см. Раздел о вычислении начальной требуемой мощности), мощность может быть рассчитана с использованием ранее построенной линии для зависимости скорости от крутящего момента.
Примерная таблица расчетов для двигателя 2668W024CR показана в таблице 1. Затем на график наносится каждая расчетная точка мощности. Результирующая функция представляет собой параболическую кривую, показанную ниже на Графике 1. Максимальная механическая мощность достигается примерно при половине крутящего момента сваливания.Скорость в этот момент составляет примерно половину скорости холостого хода.
Создайте таблицу в электронной таблице КПД двигателя в различных точках от скорости холостого хода до крутящего момента при остановке. Приведено напряжение, приложенное к двигателю, и нанесен график силы тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.Опять же, примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая — на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Определения сюжета
- Синий = скорость по сравнению с крутящим моментом ( n по сравнению с M )
- Красный = ток по сравнению с крутящим моментом ( I против M )
- Зеленый = эффективность по сравнению с крутящим моментом ( η или M )
- Коричневый = мощность в зависимости от крутящего момента ( P vs. М )
Характеристики двигателя
Примечание. Пунктирные линии представляют значения, которые могут быть получены для холодного двигателя (без повышения температуры), однако сплошные линии учитывают влияние магнита и
змеевик подогрева на теплом моторе (об этом позже). Обратите внимание, как все четыре сплошных графика изменяются в результате увеличения сопротивления в медных обмотках и ослабления.
выходной крутящий момент из-за нагрева. Таким образом, ваши результаты могут немного отличаться в зависимости от того, холодный или теплый ваш двигатель, когда вы строите графики.Теоретический расчет параметров двигателя
Еще одним полезным параметром при выборе двигателя является постоянная двигателя. Правильное использование этой добротности существенно сократит итерационный процесс выбора двигателя постоянного тока. Он просто измеряет внутреннюю способность преобразователя преобразовывать электрическую мощность в механическую.
Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке. Знаменатель называется потерей резистивной мощности. С помощью некоторых алгебраических манипуляций уравнение можно упростить до:
Имейте в виду, что k m (постоянная двигателя) не следует путать с k M (постоянная момента).Обратите внимание, что индекс константы двигателя — это строчная буква « m », в то время как индекс постоянной крутящего момента использует заглавную букву « M ».
Для щеточного или бесщеточного двигателя постоянного тока относительно небольшого размера отношения, которые управляют поведением двигателя в различных обстоятельствах, могут быть выведены из законов физики и характеристик самих двигателей. Правило Кирхгофа по напряжению гласит: «Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала.Применительно к двигателю постоянного тока, последовательно соединенному с источником питания постоянного тока, правило Кирхгофа может быть выражено следующим образом: «Номинальное напряжение питания от источника питания должно быть равно по величине сумме падений напряжения на сопротивлении обмоток. и обратная ЭДС, генерируемая двигателем ».
Где:
U = Электропитание в В
I = Ток в А
R = Терминальное сопротивление в Ом
U E = Обратная ЭДС в ВОбратная ЭДС, создаваемая двигателем, прямо пропорциональна угловой скорости двигателя.Константа пропорциональности — это постоянная обратной ЭДС двигателя.
Где:
ω = Угловая скорость двигателя
k E = Постоянная обратной ЭДС двигателяСледовательно, путем подстановки:
Постоянная противо-ЭДС двигателя обычно указывается производителем двигателя в В / об / мин или мВ / об / мин. Чтобы получить значимое значение для обратной ЭДС, необходимо указать скорость двигателя в единицах, совместимых с указанной постоянной обратной ЭДС.
«Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала».
(Правило напряжения Кирхгофа)Постоянная двигателя зависит от конструкции катушки, силы и направления магнитных линий в воздушном зазоре. Хотя можно показать, что три обычно указанные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются соответствующие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Крутящий момент, создаваемый ротором, прямо пропорционален току в обмотках якоря. Константа пропорциональности — это постоянная крутящего момента двигателя.
Где:
M м = крутящий момент, развиваемый на двигателе
k M = постоянная крутящего момента двигателяПодставляя это соотношение для получения текущего ресурса:
Крутящий момент, развиваемый на роторе, равен моменту трения двигателя плюс момент нагрузки (из-за внешней механической нагрузки):
Где:
M R = Момент трения двигателя
M L = Момент нагрузкиПредполагая, что на клеммы двигателя подается постоянное напряжение, скорость двигателя будет прямо пропорциональна сумме момента трения и момента нагрузки.Константа пропорциональности — это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по формуле:
Где:
Δn = Изменение скорости
ΔM = Изменение крутящего момента
M H = Тормозной момент
n 0 = Скорость холостого ходаАльтернативный подход к получению этого значение — найти скорость, n :
Используя исчисление, мы дифференцируем обе стороны относительно M , что дает:
Хотя здесь мы не показываем отрицательный знак,
это подразумевается
что результат приведет к уменьшению (отрицательному)
склон.Пример расчета теоретического двигателя
Давайте немного углубимся в теоретические расчеты. Двигатель постоянного тока без сердечника 2668W024CR должен работать с напряжением 24 В на клеммах двигателя и крутящим моментом 68 мНм. Найдите результирующую константу двигателя, скорость двигателя, ток двигателя, КПД двигателя и выходную мощность. Из таблицы данных двигателя видно, что скорость холостого хода двигателя при 24 В составляет 7 800 мин -1 .Если крутящий момент не связан с валом двигателя, двигатель будет работать с этой скоростью.
Во-первых, давайте получим общее представление о характеристиках двигателя, вычислив постоянную двигателя k m . В этом случае мы получаем константу 28,48 мНм / кв.рт. (Вт).
Скорость двигателя под нагрузкой — это просто скорость холостого хода за вычетом снижения скорости из-за нагрузки. Константа пропорциональности для отношения между скоростью двигателя и крутящим моментом двигателя — это крутизна зависимости крутящего момента отКривая скорости, заданная делением скорости холостого хода двигателя на крутящий момент при останове. В этом примере мы вычислим снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы измерения мНм:
Теперь через замену:
В этом случае скорость двигателя под нагрузкой должна быть приблизительно:
Ток двигателя под нагрузкой складывается из тока холостого хода и тока, возникающего в результате нагрузки.
Константа пропорциональности тока и крутящего момента нагрузки — это постоянная крутящего момента ( k M ) . Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока k I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий в результате этой нагрузки (без учета нагрева), приблизительно равен:
.
Полный ток двигателя можно приблизительно определить, суммируя это значение с током холостого хода двигателя.В таблице данных указан ток холостого хода двигателя как 78 мА. После округления общий ток будет примерно:
.
Выходная механическая мощность двигателя — это просто произведение скорости двигателя и крутящего момента с поправочным коэффициентом для единиц (при необходимости). Следовательно, выходная мощность двигателя будет примерно:
.
Подводимая к двигателю механическая мощность является произведением приложенного напряжения и общего тока двигателя в амперах. В этом приложении:
Поскольку КПД η — это просто выходная мощность, деленная на входную мощность, давайте посчитаем ее в нашей рабочей точке:
Оценка температуры обмотки двигателя во время работы:
Ток I , протекающий через сопротивление R , приводит к потере мощности в виде тепла I 2 · R .В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря представляет собой потерю мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
Тепло, возникающее в результате потерь в катушке I 2 · R , рассеивается за счет теплопроводности через компоненты двигателя и воздушного потока в воздушном зазоре. Легкость, с которой это тепло может рассеиваться в двигателе (или любой системе), определяется тепловым сопротивлением.
Термическое сопротивление (которое является обратной величиной теплопроводности) показывает, насколько хорошо материал сопротивляется теплопередаче по определенному пути. Производители двигателей обычно указывают на способность двигателя рассеивать тепло, предоставляя значения теплового сопротивления R th . Например, алюминиевая пластина с большим поперечным сечением будет иметь очень низкое тепловое сопротивление, тогда как значения для воздуха или вакуума будут значительно выше. В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.).). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Общие потери I 2 · R в катушке (источнике тепла) умножаются на тепловое сопротивление для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
Где:
ΔT = Изменение температуры в К
I = Ток через обмотки двигателя в А
R = Сопротивление обмоток двигателя в Ом
R th2 = Тепловое сопротивление от обмоток к корпусу в к / Вт
R th3 = Тепловое сопротивление окружающей среде в к / ВтПродолжим наш пример, используя двигатель 2668W024CR, работающий с током 2458 А в обмотках двигателя, с сопротивлением якоря 1, 03 Ом, тепловое сопротивление между обмоткой и корпусом составляет 3 к / Вт, а тепловое сопротивление между корпусом и окружающей средой — 8 к / Вт.Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Поскольку шкала Кельвина использует то же приращение единиц, что и шкала Цельсия, мы можем просто подставить значение Кельвина, как если бы оно было значением Цельсия. Если предполагается, что температура окружающего воздуха составляет 22 ° C, то конечная температура обмоток двигателя может быть приблизительно равна:
Где:
T теплый = Температура обмотки
Важно убедиться, что конечная температура обмоток не превышает номинальное значение двигателя, указанное в техническом паспорте.В приведенном выше примере максимально допустимая температура обмотки составляет 125 ° C. Поскольку расчетная температура обмотки составляет всего 90,4 ° C, тепловое повреждение обмоток двигателя не должно быть проблемой в этом приложении.
Можно использовать аналогичные вычисления, чтобы ответить на вопросы другого типа. Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, требуется запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C — 22 ° C = 103 ° C
Теперь мы можем рассчитать увеличение сопротивления катушки из-за рассеивания тепловой мощности:
Где:
α Cu = Температурный коэффициент меди в единицах K -1
(Обратный Кельвин)Таким образом, из-за нагрева катушки и магнита из-за рассеивания мощности от потерь I 2 · R сопротивление катушки увеличилось с 1,03 Ом до 1,44 Ом.Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы наблюдать влияние повышения температуры на характеристики двигателя:
Где:
α M = Температурный коэффициент магнита в единицах K -1
(Обратный Кельвин)Теперь мы пересчитываем новую константу обратной ЭДС k E и наблюдаем за результатами. Из формулы, полученной нами выше:
Как мы видим, постоянная крутящего момента ослабевает в результате повышения температуры, как и константа обратной ЭДС! Таким образом, сопротивление обмотки двигателя, постоянная крутящего момента и постоянная обратная ЭДС — все это отрицательно сказывается по той простой причине, что они зависят от температуры.
Мы могли бы продолжить вычисление дополнительных параметров в результате более горячей катушки и магнита, но наилучшие результаты дает выполнение нескольких итераций, что лучше всего выполняется с помощью программного обеспечения для количественного анализа. По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
Обратите внимание, что максимально допустимый ток через обмотки двигателя может быть увеличен за счет уменьшения теплового сопротивления двигателя. Тепловое сопротивление между ротором и корпусом R th2 в первую очередь определяется конструкцией двигателя. Тепловое сопротивление корпуса R th3 можно значительно уменьшить, добавив радиаторы.Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Следовательно, обычно происходит некоторый отвод тепла, который возникает в результате простой установки двигателя в теплопроводящий каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Для получения дополнительной информации о расчетах бесщеточного двигателя постоянного тока и о том, как на характеристики электродвигателя может влиять тепловая мощность, обратитесь к квалифицированному инженеру FAULHABER.Мы всегда готовы помочь.
Максимальные и минимальные значения напряжения двигателя
Экономические убытки от преждевременного отказа двигателя огромны. В большинстве случаев цена самого мотора тривиальна по сравнению со стоимостью внеплановых остановок процессов. Как высокое, так и низкое напряжение могут вызвать преждевременный отказ двигателя, равно как и дисбаланс напряжений. Здесь мы рассмотрим влияние низкого и высокого напряжения на двигатели и соответствующие изменения производительности, которые вы можете ожидать при использовании напряжения, отличного от указанного на паспортной табличке.
Воздействие низкого напряжения. Когда вы подвергаете двигатель воздействию напряжения ниже номинального, указанного на паспортной табличке, некоторые характеристики двигателя изменятся незначительно, а другие резко изменятся. Чтобы приводить в действие фиксированную механическую нагрузку, подключенную к валу, двигатель должен потреблять фиксированное количество энергии от линии. Количество потребляемой двигателем мощности примерно соответствует току напряжения 2 (в амперах). Таким образом, когда напряжение становится низким, ток должен увеличиваться, чтобы обеспечить такое же количество энергии.Увеличение тока представляет опасность для двигателя только в том случае, если этот ток превышает номинальный ток двигателя, указанный на паспортной табличке. Когда сила тока превышает номинальное значение, указанное на паспортной табличке, в двигателе начинает накапливаться тепло. Без своевременной коррекции это тепло приведет к повреждению двигателя. Чем больше тепла и чем дольше на него воздействуют, тем больше повреждение мотора.
Существующая нагрузка является основным фактором при определении того, насколько снижение напряжения питания может выдержать двигатель (см. Врезку ниже). Например, давайте посмотрим на двигатель с небольшой нагрузкой.Если напряжение уменьшается, ток увеличивается примерно в той же пропорции, что и напряжение. Например, снижение напряжения на 10% приведет к увеличению силы тока на 10%. Это не повредит двигатель, если ток будет ниже значения, указанного на паспортной табличке.
А что, если у этого двигателя большая нагрузка? В этом случае у вас уже есть большой ток, поэтому напряжение уже ниже, чем было бы без нагрузки. Возможно, вы даже приблизитесь к нижнему пределу напряжения, указанному на паспортной табличке.Когда происходит снижение напряжения, ток возрастает до нового значения, которое может превышать номинальный ток при полной нагрузке.
Низкое напряжение может привести к перегреву, сокращению срока службы, снижению пусковой способности и уменьшению момента подъема и отрыва. Пусковой крутящий момент, крутящий момент и крутящий момент отрыва асинхронных двигателей изменяются в зависимости от приложенного напряжения в квадрате. Таким образом, 10% -ное снижение напряжения, указанного на паспортной табличке (от 100% до 90%, от 230 В до 207 В), снизит пусковой крутящий момент, крутящий момент отжима и крутящий момент отрыва в раз.92.9. Полученные значения составят 81% от значений полного напряжения. При напряжении 80% результат будет 0,82,8 или значение 64% от полного значения напряжения. Что это означает в реальной жизни? Что ж, теперь вы можете понять, почему трудно запустить «трудно запускаемые» нагрузки, если напряжение оказывается низким. Точно так же крутящий момент двигателя будет намного ниже, чем при нормальном напряжении.
На слабо нагруженных двигателях с легко запускаемыми нагрузками снижение напряжения не будет иметь какого-либо заметного эффекта, за исключением того, что оно может помочь снизить потери при небольшой нагрузке и повысить эффективность в этих условиях.Это принцип, лежащий в основе некоторого дополнительного оборудования, предназначенного для повышения эффективности.
Воздействие высокого напряжения. Люди часто делают предположение, что, поскольку низкое напряжение увеличивает силу тока на двигателях, высокое напряжение должно уменьшать потребляемую силу тока и нагрев двигателя. Это не тот случай. Высокое напряжение на двигателе приводит к насыщению магнитной части двигателя. Это приводит к тому, что двигатель потребляет чрезмерный ток, пытаясь намагнитить утюг сверх точки, в которой намагничивание является практичным.
Двигатели допускают некоторое изменение напряжения выше расчетного. Однако, если напряжение превышает расчетное, сила тока возрастет, что приведет к соответствующему увеличению нагрева и сокращению срока службы двигателя.
Например, производители ранее рассчитывали двигатели на 220/440 В с диапазоном допуска 510%. Таким образом, допустимый диапазон напряжения на высоковольтных соединениях составляет от 396 до 484 В. Несмотря на то, что это так называемый диапазон допуска, наилучшие характеристики будут достигнуты при номинальном напряжении.Крайние концы (высокие или низкие) создают ненужную нагрузку на двигатель.
Не попадайтесь в ловушку, думая, что с вами все в порядке, только потому, что ваше напряжение питания находится в этих пределах. Назначение этих диапазонов — приспособиться к обычным почасовым колебаниям напряжения на заводе. Постоянная работа на высоких или низких предельных значениях сокращает срок службы двигателя.
Такая чувствительность к напряжению характерна не только для двигателей. Фактически, колебания напряжения влияют на другие магнитные устройства аналогичным образом.Соленоиды и катушки, которые вы найдете в реле и пускателях, лучше переносят низкое напряжение, чем высокое. Это также верно для балластов в люминесцентных, ртутных и натриевых осветительных приборах высокого давления. И это касается трансформаторов всех типов. Лампы накаливания особенно чувствительны к высокому напряжению. Увеличение напряжения на 5% сокращает срок службы лампы на 50%. Повышение напряжения на 10% выше номинального сокращает срок службы лампы накаливания на 70%.
В целом, для оборудования определенно будет лучше, если вы измените ответвления на входных трансформаторах, чтобы оптимизировать напряжение в цехе до уровня, близкого к номинальным характеристикам оборудования.На старых заводах вам, возможно, придется пойти на некоторые компромиссы из-за различий в стандартах для старых двигателей (220/440 В) и более новых стандартов «Т-образная рама» (230/460 В). Напряжение посередине этих двух напряжений (что-то вроде 225 В или 450 В) обычно дает наилучшую общую производительность. Высокое напряжение всегда приводит к снижению коэффициента мощности, что увеличивает потери в системе. Это приводит к более высоким эксплуатационным расходам на оборудование и систему.
Стандартный рисунок (найденный в справочниках по двигателям и в оригинальной печатной версии этой статьи) иллюстрирует общее влияние высокого и низкого напряжения на характеристики двигателей с Т-образной рамой.Этот график широко используется в различных справочных материалах. Но это всего лишь пример и не дает точной информации, которая применима ко всем двигателям. Вместо этого он представляет только один тип двигателя, с большим количеством вариаций от одного двигателя к другому. Например, самая низкая точка на линии усилителя полной нагрузки не всегда возникает при напряжении на 21/2% выше номинального. На некоторых двигателях это может произойти при напряжении ниже номинального. Кроме того, рост ампер полной нагрузки при напряжениях выше номинальных имеет тенденцию быть более крутым для одних конструкций обмоток двигателей, чем для других.Боковая панель на странице 78 предлагает некоторые рекомендации по определению влияния колебаний напряжения на отдельные конструкции и корпуса двигателей.
Не подвергайте свои электродвигатели и другое электрическое оборудование нагрузке из-за того, что энергосистема работает на краях предельных значений напряжения или около них. Наилучший срок службы и наиболее эффективная работа обычно происходят, когда вы эксплуатируете двигатели при напряжениях, очень близких к номинальным значениям, указанным на паспортной табличке. Подавая напряжение на двигатели, держитесь подальше от «внешних пределов».«
Этот текст является адаптацией «Документов Коверна», любезно предоставленных компанией Baldor Electric Co., Уоллингфорд, штат Коннектикут, отредактированной Марком Ламендолой, техническим редактором EC&M. Кауэрн — разработчик приложений Baldor.
Завод Инжиниринг | Как анализ тока двигателя помогает двигателям?
Неисправности электродвигателей способствуют нескольким факторам. К ним относятся плохие соединения, загрязнение обмоток и короткое замыкание витков с обмотками. Такие недостатки начинаются с малых и незначительных, но со временем усугубляются, если их не устранить.В этих случаях может произойти отказ двигателя, что отрицательно скажется на производительности и прибылях бизнеса.
Имея это в виду, важно выполнять определенные методы, которые помогают предотвратить отказы и отказы электродвигателя. Один из таких методов — анализ тока двигателя. Он контролирует исправность и производительность вашего электродвигателя.
Факты анализа тока двигателя
Одним из процессов оценки состояния электродвигателя является анализ тока двигателя.Аналитик выполняет этот тип тестирования, чтобы убедиться в исправности двигателя.
Также стоит отметить, что анализ тока двигателя проверяет определенные режимы отказа. Эти режимы включают:
- Свободный фундамент двигателя
- Дефекты ремня
- Ухудшение или поломка схемы
- Текущий дисбаланс и проблемы с нагрузкой
- Эксцентриситет ротора
- Повреждения ротора
- Нарушения качества электроэнергии, такие как аномалии коэффициента мощности, дисбаланс напряжения и проблемы с гармониками.
При анализе тока двигателя выполняются три фазы обмотки. Анализатор измеряет полное сопротивление, индуктивность и сопротивление обмотки. Кроме того, измеряются другие области, такие как сопротивление изоляции относительно земли и фазовый угол. В типичном исправном двигателе эти области должны оставаться в идеальном равновесии, в противном случае возможна неисправность или отказ.
Тестирование анализа тока двигателя в режиме онлайн и офлайн
Тестирование анализа тока двигателя может проводиться в режиме онлайн или офлайн.При онлайн-тестировании аналитик проводит тесты, пока двигатель используется в нормальных условиях. Анализ тока и анализ напряжения — это две категории онлайн-тестирования.
Сюда входит проверка:
- Сломанные или ослабленные стержни ротора
- Эксцентриситет ротора
- Проблемы со сцеплением или перекосом ремня
- Трещины на концевых кольцах.
Анализ напряжения включает определение проблем качества электроэнергии, таких как дисбаланс напряжения и вредные гармоники, и это лишь некоторые из них.
Автономный режим тестирования требует обесточивания двигателя перед выполнением теста, что обычно является предпочтительным для измерения сопротивления заземления. Измерение емкости, импеданса и индуктивности дает информацию о состоянии обмоток. Например, индуктивность помогает выявить межвитковые замыкания, а емкость относительно земли определяет уровни загрязнения обмотки. Изменения емкости и индуктивности могут повлиять на полное сопротивление цепи переменного тока.
Итог
Анализ тока двигателя направлен на предотвращение отказов и сбоев двигателя. Весь процесс занимает всего около 15 минут, чтобы предоставить информацию о существующих проблемах, таких как ненадежные соединения, сгоревшие обмотки и заземленные обмотки. Если ни одна из этих проблем отсутствует, не нужно беспокоиться, потому что двигатель в отличном состоянии.
 Необходимо учитывать КПД двигателя, чтобы избежать недостаточной мощности источника питания.
Необходимо учитывать КПД двигателя, чтобы избежать недостаточной мощности источника питания.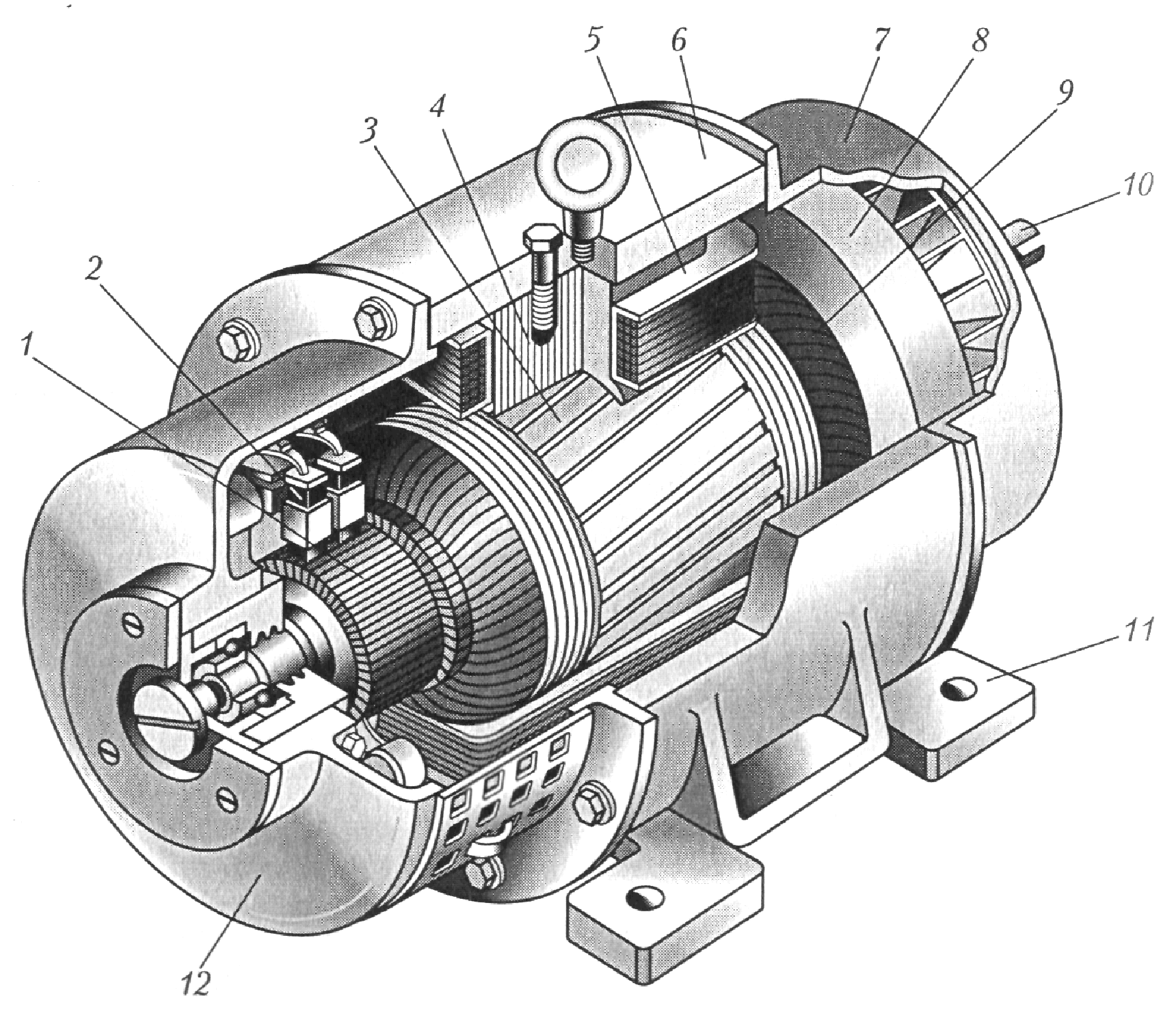 38
38 с. (в лошадиных силах по английски) = 745.7 Вт = 0,746 кВт = 550 фут-фунт / с = 2545 БТЕ / ч = 33,000 фут-фунт / м = 1,0139 метрическая мощность в лошадиных силах ~ = 1,0 кВА
с. (в лошадиных силах по английски) = 745.7 Вт = 0,746 кВт = 550 фут-фунт / с = 2545 БТЕ / ч = 33,000 фут-фунт / м = 1,0139 метрическая мощность в лошадиных силах ~ = 1,0 кВА  Это кажется удивительным для многих пользователей, особенно потому, что ток двигателя часто намного превышает входной ток контроллера двигателя.
Это кажется удивительным для многих пользователей, особенно потому, что ток двигателя часто намного превышает входной ток контроллера двигателя. 
 с.
с.