
Формула расчета частоты вращений
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.

Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
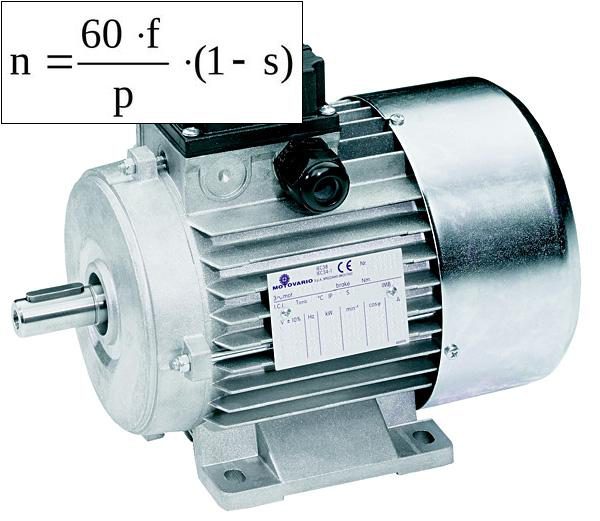
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
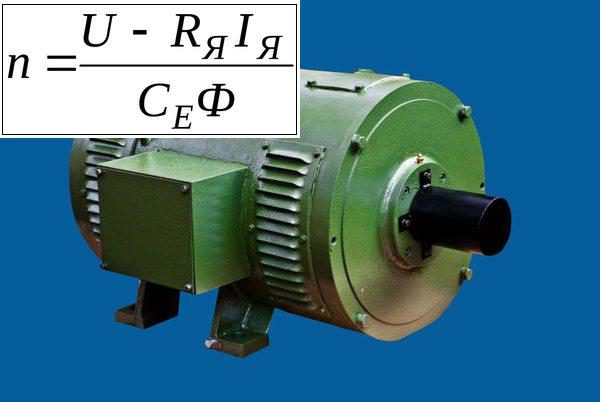
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:
Расчётные формулы электродвигателей
Расчётные формулы электродвигателей
Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а
где Рн — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в.
Синхронное число оборотов электродвигателя
где р —число пар полюсов обмотки статора электродвигателя, f — частота.
Номинальное число оборотов асинхронного электродвигателя
где s — скольжение асинхронного электродвигателя, %.
Скольжение асинхронного электродвигателя, %
Номинальный момент вращения электродвигателя, кГ·м
где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ.
Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек
где квт — сумма потерь в электродвигателе.
Окружная скорость (шкива, вала, коллектора, ротора), м/сек.
где D — диаметр соответствующего элемента машины, м.
Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора
где прег — пониженное число оборотов двигателя в минуту;
ηрег — к. п. д. при пониженном числе оборотов.
Соотношения между единицами измерения работы
Соотношения между единицами измерения мощности
| Скорость вращения и скольжение. Асинхронный трехфазный двигатель, как и все электрические двигатели, состоит из двух основных частей: неподвижного статора и вращающегося внутри него ротора. Как статор, так и ротор имеют обмотки из витков медного или алюминиевого проводника, уложенные в пазах. Обмотка ротора может быть либо фазной, у которой концы каждой фазы выводятся на контактные кольца, насаженные на валу ротора, либо замкнутой накоротко и не имеющей выводов. Механические характеристики асинхронных двигателей с короткозамкнутым ротором в большей степени зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам различаются двигатели с нормальным, глубоким пазом, а также с двойной роторной обмоткой (так называемая «двойная беличья клетка»). Принцип действия асинхронного трехфазного двигателя основан на том, что переменный ток, проходя по трехфазной обмотке статора, создает вокруг него магнитное поле, вращающееся с частотой питающей сети переменного тока. Силовые линии поля пересекают витки обмотки ротора (замкнутой либо накоротко, либо через сопротивление) и индуктируют в ней электродвижущую силу (ЭДС), вызывающую в обмотке ротора ток. Ток ротора в свою очередь создает магнитное поле, взаимодействующее с вращающимся поем статора и заставляющее ротор двигателя вращаться в направлении, соответствующем направлению вращения поля статора. Скорость вращения магнитного потока статора зависит от частоты сети и от числа полюсов статорной обмотки и определятся формулой: nc=60fc/p [об/мин], (1-1) где fc – частота сети; р – число пар полюсов статорной обмотки. Скорость вращения ротора меньше скорости вращения поля статора, найденной по формуле (1-1), на величину скольжения. Это условие необходимо для работы асинхронного двигателя, так как, если бы ротор вращался с той же угловой скоростью, что и вращающееся поле статора, т. е. синхронно, то витки роторной обмотки не пересекались бы силовыми линиями поля статора и в роторе не индуктировался бы ток, а, следовательно, исчезла бы причина, вызывающая его вращение. Скольжение выражается в относительных единицах или в процентах и определяется по формулам S=(nc-nн)/nc (1-2) или S=100%(nc-nн)/nc; (1-2) здесь nc – синхронная скорость вращения поля статора, об/мин; nн – номинальная скорость вращения ротора, об/мин. Материал взят из «Справочника по асинхронным двигателям и пускорегулирующей аппаратуре» Карвовского Г. А. и Оскоркова С.П. Госэнергоиздат, 1962 г. |
От чего зависит частота вращения электродвигателя. Регулирование скорости вращения асинхронных электродвигателей
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.
Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Эффективность электродвигателя при частичной загрузке
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым «напор-подача», необходимо оценить воздействие относительной нагрузки на электродвигатель.
![]()
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов — Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигател
я
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n
= скорость вращения в об/мин
f
= частота питающей сети (Гц)
p
= количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.

Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с м
обзор эффективных методов определения скорости шпинделя
При покупке электродвигателя с рук рассчитывать на наличие технической документации к нему не приходится. Тогда встает вопрос о том, как узнать количество оборотов приобретаемого устройства. Можно довериться словам продавца, однако добросовестность не всегда является их отличительной чертой.

Тогда возникает проблема с определением числа оборотов. Решить ее можно, зная некоторые тонкости устройства мотора. Об этом и пойдет речь дальше.

Краткое содержимое статьи:
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».

Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.

Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.

Когда кольцо наполовину закрыто катушкой, число оборотов за минуту достигает 3000. Если закрывается третья часть кольца – число оборотов составляет примерно 1500. При четверти – число оборотов равно 1000.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.

Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.

На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.

Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.

Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.

Частотные преобразователи выступают в качестве надежных устройств, способных кардинальным образом менять частоту тока и форму сигнала. Их основу составляют полупроводниковые триоды (транзисторы) высокой мощности и модулятор импульсов.

Микроконтроллер управляет всем процессом работы преобразователя. Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования.
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.

При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.

Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.

Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:

Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.

Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.

Датчик давления устанавливается в емкости, посылает сигнал при достижении должного уровня, благодаря чему мотор останавливается.
Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.

Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.

Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.

Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.

Фото оборотов электродвигателя





























Адрес этой страницы (вложенность) в справочнике dpva.ru: Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица.
главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица.формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.

Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.

Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.

Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.

Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.

Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.

В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м2 и имеет рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг·м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с-2.
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.
Моделирование управления двигателем с переменной скоростью
— MATLAB и Simulink
Simulate Variable Speed Motor Control
Variable Speed Motor Control of AC электрические машины использует принудительно-коммутируемые электронные
переключатели, такие как IGBT, MOSFET и GTO. Асинхронные машины, питаемые длительностью импульсов
модуляция (PWM) преобразователи напряжения (VSC) в настоящее время постепенно
замена двигателей постоянного тока и тиристорных мостов. С ШИМ в сочетании с современным управлением
такие методы, как полевое управление или прямое управление крутящим моментом, вы можете получить то же самое
гибкость в управлении скоростью и крутящим моментом, как в машинах постоянного тока.В этом руководстве показано, как построить
простой привод переменного тока без обратной связи, управляющий асинхронной машиной. Simscape ™
Electric ™ Specialized Power Systems содержит библиотеку готовых моделей, которые позволяют вам
для моделирования систем электроприводов без необходимости самостоятельно строить эти сложные системы.
Дополнительные сведения об этой библиотеке см. В разделе «Библиотека электрических приводов».
Библиотека>>>> содержит четыре наиболее часто используемых трехфазных машины: упрощенная
и комплектные синхронные машины, асинхронные машины и синхронные машины с постоянными магнитами
машина.Каждая машина может использоваться в генераторном или моторном режиме. В сочетании с линейными и
нелинейные элементы, такие как трансформаторы, линии, нагрузки, выключатели и т. д., они могут быть использованы для
моделировать электромеханические переходные процессы в электрической сети. Их также можно комбинировать с
силовые электронные устройства для моделирования приводов.
Библиотека>>>> содержит блоки, позволяющие моделировать диоды, тиристоры, ГТО.
тиристоры, полевые МОП-транзисторы и устройства IGBT. Вы можете соединить несколько блоков вместе, чтобы построить
трехфазный мост.Например, для инверторного моста IGBT потребуется шесть IGBT и шесть
антипараллельные диоды.
Чтобы упростить реализацию мостов, блок Universal Bridge автоматически выполняет эти соединения для
ты.
Построение и моделирование двигателя с ШИМ-управлением
Выполните следующие действия, чтобы построить модель двигателя с ШИМ-управлением.
Сборка и настройка модели
Введите
power_newв командной строке, чтобы открыть
новая модель.Сохраните модель какpower_PWMmotorДобавьте блок Universal Bridge из>>>> библиотеки
В параметрах Параметры для
Универсальный мостиковый блок, набор Power Electronic
параметр устройства кIGBT / диоды.Добавить блок единиц СИ для асинхронной машины
из>>>> библиотекиЗадайте параметры блока Asynchronous Machine SI Units как
следует.Настройки Параметр Значение Конфигурация Тип ротора Беличья клеткаПараметры Номинальная мощность, напряжение (линейно-линейное) и частота [Pn (ВА),
Vn (Vrms), fn (Hz)][3 * 746 220 60]Сопротивление и индуктивность статора [Rs (Ом) Lls (H)
][1.2) F (Н.м.с) p ()
][0,02 0,005752 2][скольжение, th (градус), ia, ib, ic (A), pha, phb,
phc (град.)][1 0 0 0 0 0 0 0]Установка номинальной мощности на
3 * 746ВА и номинальной
линейное напряжение Vn до220Vrms реализует 3 л.с., 60 Гц
машина с двумя парами полюсов.Поэтому номинальная скорость немного ниже, чем
синхронная частота вращения 1800 об / мин, или Вт с =
188,5 рад / с.Установка параметра Тип ротора на
Беличья клетка, скрывает выходные порты,
a , b и c , потому что
эти три клеммы ротора обычно замкнуты накоротко для нормального двигателя.
операция.Доступ к внутренним сигналам блока Asynchronous Machine:
Добавьте блок Bus Selector из библиотеки>.
Подключите выходной порт измерения, м , машины
блок к входному порту блока Bus Selector.Откройте диалоговое окно Block Parameters для шины
Блок селектора. Дважды щелкните блок.Удалить предварительно выбранные сигналы. В избранном
элементы панель, Shift выбрать???и
signal1??? signal2, затем щелкните
Удалить .Выберите интересующие сигналы:
На левой панели диалогового окна выберите>. Щелкните Выберите >> .
Выбрать>. Щелкните Выберите >> .
Выбрать.
Щелкните Выберите >> .
Нагрузка и привод двигателя
Реализуйте характеристику крутящего момента-скорости нагрузки двигателя.Предполагая квадратичный крутящий момент-скорость
характеристика (нагрузка вентилятора или насоса)., крутящий момент T пропорционален
в квадрат скорости ω.
Номинальный крутящий момент двигателя составляет
Следовательно, постоянная k должна быть
Добавить интерпретируемый функциональный блок MATLAB из
библиотека>. Дважды щелкните функциональный блок и введите выражение для
крутящий момент как функция скорости:3.2.Подключите выход функционального блока к входу крутящего момента.
порт, Тм , станочного блока.Добавьте блок источника напряжения постоянного тока из библиотеки>>>>. В настройках Parameters для блока,
для параметра Амплитуда (В) укажите
400.Измените имя блока измерения напряжения на
ВАБ.Добавьте блок Ground из библиотеки>>>>. Подключите силовые элементы и блоки датчиков напряжения, как показано на рисунке.
на схеме двигателяpower_PWM
модель.
Управление мостом инвертора с помощью генератора импульсов
Для управления мостом инвертора используйте генератор импульсов.
Добавьте блок генератора ШИМ (2 уровня) из библиотеки>>>>. Вы можете настроить преобразователь для работы в разомкнутом контуре, и
три модулирующих сигнала ШИМ генерируются внутренне.Подключите выход P к
вход импульсов блока Universal BridgeОткройте блок PWM Generator (2-Level)
диалоговое окно и установите следующие параметры.Тип генератора
Трехфазный мост (6 импульсов)Режим работы
НесинхронизированныйЧастота
18 * 60 Гц (1080 Гц)Начальная фаза
0 градусовМинимальные и максимальные значения
[-1,1]методика отбора проб
Природные
внутренней генерации опорного сигнала
выбран
Индекс модуляции 90 036
0.9Опорный сигнал частота
60 ГцОпорный сигнал фаза
0 градусов4
Время выборки 10e-6 сБлок был дискретизирован, поэтому
импульсы изменяются кратно указанному временному шагу.Время
шаг 10 мкс соответствует +/- 0,54% периода переключения
при 1080 Гц.Один из распространенных методов генерации импульсов ШИМ использует сравнение
синтезируемого выходного напряжения (в данном случае 60 Гц) с треугольным
волна на частоте переключения (в данном случае 1080 Гц). Линия к строке
Выходное среднеквадратичное напряжение является функцией входного напряжения постоянного тока и
индекс модуляции м , как определяется следующим
уравнение:Следовательно, постоянное напряжение 400 В и коэффициент модуляции
0.90 дает выходное линейное напряжение 220 В (среднеквадр.), Которое является
номинальное напряжение асинхронного двигателя.
Отображение сигналов и измерение основного напряжения и тока
Теперь вы добавляете блоки для измерения основной составляющей (60 Гц)
встроены в прерванное напряжение Vab и в ток фазы А. Добавьте в модель блок Фурье из>>>> библиотеки.Откройте диалоговое окно блока Фурье и убедитесь, что параметры установлены как
следует:Основной
частота60 ГцГармоника n
1Начальный ввод
0 [0 0] 9000
Время выборки
10e-6 сПодключите этот блок к выходу датчика напряжения Vab.
Дублируйте блок Фурье. Измерять
ток фазы А, вы подключаете этот блок к статору
текущий is_a выход блока выбора шины.Передать эти сигналы в симуляцию
Инспектор данных: сигналы Te, ias и w измерительного выхода
блока Asynchronous Machine, и напряжение VAB.
Моделирование привода с ШИМ-двигателем с помощью алгоритма непрерывной интеграции
Установите время остановки на 1 с и запустите моделирование.Откройте Simulation Data Inspector и посмотрите на
сигналы.
Двигатель запускается и достигает установившейся скорости 181 рад / с.
(1728 об / мин) через 0,5 с. При запуске величина тока 60 Гц
достигает пика 90 А (64 А RMS), тогда как его установившееся значение составляет 10,5
A (7,4 А RMS). Как и ожидалось, величина напряжения 60 Гц содержала
в рубленой волне остается на
Также обратите внимание на сильные колебания электромагнитного момента
при запуске. Если вы увеличите крутящий момент в устойчивом состоянии, вы должны
наблюдают зашумленный сигнал со средним значением 11.9 Н-м, соответствующий
к моменту нагрузки при номинальной скорости.
Если вы увеличите масштаб трех токов двигателя, вы увидите, что
все гармоники (кратные частоте переключения 1080 Гц)
фильтруется индуктивностью статора, так что составляющая 60 Гц
доминирующий.
ШИМ-привод двигателя; Результаты моделирования для двигателя
Запуск при полном напряжении
Использование блока мультиметра
Блок Universal Bridge не является обычной подсистемой, в которой
доступны все шесть отдельных переключателей.Если вы хотите измерить
переключателя напряжений и токов необходимо использовать блок мультиметра, который дает доступ к
внутренние сигналы моста:
Откройте Universal
Диалоговое окно Bridge и установите параметр Measurement
доТоки устройства.Добавьте блок мультиметра из библиотеки>>>> Дважды щелкните блок мультиметра. Окно с шестью переключателями
токи появляются.Выберите два тока моста
рука подключена к фазе А.Они обозначены как.
iSw1
Универсальный мостiSw2
Универсальный мостЗакрыть
Количество сигналов (2) отображается на значке мультиметра.Отправить сигнал от блока мультиметра
в Инспектор данных моделирования.Перезапустите моделирование. Формы волны
полученные для первых 20 мс показаны на этом графике.Токи в переключателях 1 и 2 IGBT / диодах
Как и ожидалось, токи в переключателях 1 и 2 дополняют друг друга.
Положительный ток указывает на ток, протекающий в IGBT, тогда как
отрицательный ток указывает на ток в антипараллельном диоде.Примечание
Использование блока мультиметра не ограничивается универсальным мостом
блок.Многие блоки библиотек электрических источников и элементов
есть параметр измерения, в котором вы можете выбрать напряжения, токи,
или насыщаемые потоки трансформатора. Разумное использование мультиметра
блок уменьшает количество датчиков тока и напряжения в вашей цепи,
упрощая отслеживание.Дискретизация привода двигателя ШИМ
Вы могли заметить, что моделирование с использованием переменного шага
алгоритм интеграции относительно длинный. В зависимости от вашего компьютера,
имитация одной секунды может занять десятки секунд.Чтобы сократить
время моделирования, вы можете дискретизировать свою схему и моделировать при фиксированной
временные шаги моделирования.На вкладке Simulation щелкните Model Settings . Выбрать
Решатель . Под Выбор решателя выберите
Фиксированный шагиДискретный (без непрерывноговарианта. Откройте блок powergui и установите Simulation type на
говорится)Discrete. Установить
Время выборки с по10e-6с.Сила
система, включая асинхронную машину, теперь дискретизируется на выборке 10 мкс
время.Запустить симуляцию. Обратите внимание, что моделирование теперь выполняется быстрее
чем с непрерывной системой. Результаты хорошо сравниваются с непрерывным
система.Выполнение гармонического анализа с помощью инструмента БПФ
Два блока Фурье позволяют вычислять фундаментальную
составляющая напряжения и тока во время моделирования. если ты
хотели бы наблюдать гармонические составляющие, также вам понадобится Фурье
блок для каждой гармоники.Такой подход неудобен.Добавьте к своей модели блок Scope и подключите его к выходу VAB
Блок измерения напряжения. В блоке Scope записать данные в
рабочее пространство как структура со временем. Запустите симуляцию. Теперь используйте инструмент FFT от powergui
для отображения частотного спектра сигналов напряжения и тока.Когда симуляция завершена, откройте powergui и выберите FFT
Анализ . Откроется новое окно. Задайте параметры, определяющие анализируемые
сигнал, временное окно и частотный диапазон следующим образом:Имя
ScopeDataВвод
ввод 1Номер сигнала
1Время начала
0.7 сКоличество циклов
2Дисплей
Окно БПФОсновная частота
60 ГцМакс.частота
5000 ГцЧастотная ось
Гармонический порядокСтиль отображения
Бар (относительно Фонда или DC)Анализируемый сигнал отображается в верхнем окне.Щелкните Показать . Отображается частотный спектр
в нижнем окне, как показано на следующем рисунке.FFT-анализ линейного напряжения двигателя
Отображаются основная составляющая и полное гармоническое искажение (THD) напряжения Vab.
над окном спектра. Величина основной гармоники напряжения инвертора (312 В)
хорошо сравнивается с теоретическим значением (311 В для m = 0,9).Гармоники отображаются в процентах от основной составляющей.Как и ожидалось, гармоники возникают на частотах, кратных несущей.
(п * 18 + — к). Самые высокие гармоники (30%) появляются на 16-й гармонике (18 —
2) и 20-я гармоника (18 + 2)..
Расчет размеров двигателя
Правильный размер и выбор двигателя для вашего оборудования являются ключом к обеспечению производительности, надежности и стоимости оборудования. В дополнение к приведенной ниже информации о правильном выборе двигателя Oriental Motor предлагает онлайн-инструменты для определения размера двигателя, а также помощь сотрудников нашей службы технической поддержки.
Наша служба технической поддержки готова помочь вам правильно определить размер и выбрать двигатель в соответствии с вашим индивидуальным применением.Просто позвоните по телефону 1-800-GO-VEXTA (468-3982) (с понедельника по пятницу с 7:30 до 17:00 по тихоокеанскому стандартному времени).
Процедура выбора
Первый шаг — определить приводной механизм для вашего оборудования. Некоторые примеры: прямое вращение, шариковый винт, ремень и шкив или рейка и шестерня. Наряду с типом приводного механизма необходимо также определить размеры, массу, коэффициент трения и т. Д., Необходимые для расчета нагрузки:
- Размеры и масса (или плотность) груза
- Размеры и масса (или плотность) каждой детали
- Коэффициент трения скользящей поверхности каждой подвижной части
Далее вам нужно будет определить требуемые характеристики оборудования:
- Скорость движения и время работы
- Расстояние позиционирования и время позиционирования
- Разрешение
- Точность остановки
- Удержание позиции
- Электропитание и напряжение
- Операционная среда
- Особые особенности и требования, такие как; Открытый цикл, замкнутый цикл, программируемый, обратная связь, рейтинг IP, утверждения агентов и т. Д.
Чтобы определить требуемую мощность двигателя, необходимо вычислить три фактора; Момент инерции, крутящий момент и скорость. (Обратитесь к нижеследующим разделам по расчетам для каждого.)
После того, как вы рассчитали инерцию, крутящий момент и скорость двигателя, вы выберете тип двигателя на основе требуемых характеристик. Oriental Motor предлагает широкий ассортимент шаговых двигателей, серводвигателей, двигателей переменного тока и бесщеточных двигателей для удовлетворения конкретных потребностей вашего оборудования.
Наконец, после выбора типа двигателя вы сделаете окончательное определение двигателя, подтвердив, что характеристики выбранного двигателя (и редуктора, если применимо) удовлетворяют всем требованиям, таким как механическая прочность, время ускорения и момент ускорения.
Расчет размеров двигателя
При выборе двигателя необходимо учитывать три фактора; Момент инерции, крутящий момент и скорость.
Момент инерции
Момент инерции — это мера сопротивления объекта изменениям скорости его вращения.
Когда объект просто сидит без движения, момент инерции равен 0.
Когда вы пытаетесь заставить его двигаться, что означает, что вы хотите изменить скорость объекта с 0 на любую, возникнет эффект момента инерции.
Основная инерция (Дж) Уравнение :

Расчет момента инерции вращающегося объекта
Расчет момента инерции цилиндра
Расчет момента инерции полого цилиндра
Расчет момента инерции для смещенной оси
Расчет момента инерции для прямоугольной опоры
Расчет момента инерции для объекта при линейном движении
Единицы измерения момента инерции
Единицы инерции обычно используются двумя способами: унций в секунду и унций в секунду .Первое включает в себя гравитацию, второе — только массу.
Теоретически инерция — это фактор массы, поэтому он не должен включать гравитацию, однако практически мы не можем легко измерить массу на Земле.
Oriental Motor обычно обеспечивает инерцию в унциях на дюйм. Затем, когда мы вычисляем момент ускорения при расчете крутящего момента, мы делим общую инерцию на силу тяжести.
Плотность = 386 дюймов / сек²
- унций-дюйм² = инерция в зависимости от веса
- унций в секунду² = инерция в зависимости от массы
Расчет для унций-дюймов² в унций-дюймов²
Момент
Крутящий момент — это стремление силы вращать объект вокруг оси.Крутящий момент состоит из двух компонентов; компонент нагрузки (постоянный) и компонент ускорения.
Составляющая момента нагрузки обычно возникает из-за трения и / или силы тяжести и всегда действует на двигатель. Этот компонент обычно можно определить путем расчета или путем наложения динамометрического ключа на систему и считывания значения крутящего момента. Когда его невозможно измерить, мы используем некоторые уравнения для расчета приблизительного значения.
Однако ускоряющий момент действует на двигатель только тогда, когда он ускоряется или замедляется.Когда двигатель работает с постоянной скоростью, этот компонент исчезает. Измерять составляющую ускорения сложно, не говоря уже об опасности. Если вы хотите, чтобы нагрузка разгонялась до скорости в течение 50 миллисекунд, вполне вероятно, что динамометрический ключ слетит. Поэтому рассчитываем составляющую ускорения. Этот компонент является функцией инерции системы и скорости ускорения. Итак, как только мы определим эти значения, мы сможем вычислить момент ускорения.
Момент нагрузки ( T )
Нагрузка крутящего момента очень проста.
Как вы видите, крутящий момент в этом уравнении является произведением силы и расстояния между силой и центром вращения. Например, если вы хотите удержать силу, действующую на конец шкива, T = F x r . Таким образом, вычисление момента нагрузки определяет силу в системе и логическое расстояние между валом двигателя и местом действия силы.
Когда механика усложняется, нам нужно преобразовать F и r, чтобы они соответствовали механике.
Момент нагрузки — фактическое измерение
Если вы можете измерить силу, это самый точный способ найти силу, поскольку он учитывает всю эффективность и коэффициент трения на каждой части.
FB = Усилие, когда главный вал начинает вращаться
Силы
Есть три типа сил; вертикальный, горизонтальный и наклонный.Сила варьируется в зависимости от того, как она действует.
Расчет вертикальной силы
Расчет горизонтальной силы
Расчет силы наклона
Расчет момента нагрузки — шарико-винтовая передача
Расчет крутящего момента нагрузки — шкив
Расчет крутящего момента нагрузки — тросовый или ременной привод, реечный привод
Момент ускорения
Как упоминалось ранее, момент ускорения состоит из инерции и скорости ускорения.Если нам известны эти два значения, мы можем рассчитать момент ускорения.
Рассчитайте момент ускорения ( Ta )
Если скорость двигателя изменяется, всегда необходимо устанавливать момент ускорения или момент замедления.
Основная формула одинакова для всех двигателей. Однако используйте приведенные ниже формулы при вычислении момента ускорения для шаговых или серводвигателей на основе скорости импульса.
Общая формула для всех двигателей
При расчете момента ускорения для шаговых или серводвигателей на основе скорости импульса
Есть два основных профиля движения.Операция разгона / замедления является наиболее распространенной. Когда рабочая скорость низкая, а инерция нагрузки мала, можно использовать режим пуска / останова.
Расчет необходимого крутящего момента ( TM )
Требуемый крутящий момент рассчитывается путем умножения суммы крутящего момента нагрузки и крутящего момента ускорения на коэффициент безопасности.
Расчет эффективного крутящего момента нагрузки ( Trms ) для серводвигателей и бесщеточных двигателей серии BX
Если требуемый крутящий момент двигателя изменяется со временем, определите, можно ли использовать двигатель, вычислив эффективный момент нагрузки.Эффективный крутящий момент нагрузки становится особенно важным для режимов работы, таких как операции с быстрым циклом, когда ускорение / замедление является частым. Рассчитайте эффективный момент нагрузки при выборе серводвигателей или бесщеточных двигателей серии BX.
Скорость
Скорость определяется путем вычисления расстояния, разделенного на время. Для шаговых или серводвигателей необходимо также учитывать время разгона.
Расчет стандартной скорости
Скорость = Расстояние / Время
Для шаговых или серводвигателей
Скорость = Расстояние / (Время — Время разгона ( t1 )
Хотите узнать больше?
Команда технической поддержки
Oriental Motor и инженеры по применению будут работать с вами, чтобы определить лучшее решение для вашего приложения.Опытные члены команды ORIENTAL MOTOR знают технологию от и до. Мы найдем подходящее решение в соответствии с вашими потребностями и объясним альтернативы. Позвоните по телефону 1-800-GO-VEXTA (468-3982), чтобы поговорить с членом группы технической поддержки Oriental Motor.
.
Fast Shipping Y 90S 2 Трехфазный асинхронный двигатель переменного тока 2,2 кВт | асинхронный двигатель | асинхронный асинхронный двигатель переменного тока
ТРЕХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ СЕРИИ Y
Введение: Трехфазный асинхронный двигатель серии Y представляет собой полностью закрытый двигатель с кожухом с охлаждающим вентилятором, соответствующий стандарту ICE. Он обладает выдающимися характеристиками, такими как высокая эффективность, энергосбережение, высокий пусковой момент, низкий уровень шума, небольшая вибрация и простота обслуживания.
Области применения : общего назначения, включая отрезные станки, вентиляторы, станки, миксер, сельскохозяйственную технику, насосы и т. Д.
Условия эксплуатации
Температура окружающей среды: -15 ° C Номинальное напряжение: 380 В или любое напряжение в диапазоне от 220 В до 660 В.
Номинальная частота: 50 Гц, 60 Гц Класс защиты: IP44, IP54, IP55
Класс изоляции: B F
Метод охлаждения: IC0141 Режим работы: S1 (непрерывный)Подключение: соединение звездой до 3 кВт, соединение треугольником для 4 кВт и выше.
Технические данные
Трехфазный асинхронный двигатель серии Y Модель Мощность Полная нагрузка кВт л.с. Cuttent (А) скорость (об / мин) 380 В 50 Гц Асинхронная скорость 3000 об / мин (2 полюса) Y-801-2 0.75 1 1,81 2830 Y-802-2 1,1 1,5 2,52 2830 Y-90S-2 1,5 2 3,44 2840 Y-90L-2 2.2 3 4,83 2840 Y-100L-2 3 4 6,39 2870 Y-112M-2 4 5,5 8,17 2890 Y-132S1-2 5.5 7,5 11,1 2900 Y-132S2-2 7,5 10 15 2900 У-160М1-2 11 15 21,8 2930 У-160М2-2 15 20 29.4 2930 Y-160L-2 18,5 25 35,5 2930 Y-180M-2 22 30 42,2 2940 380 В 50 Гц Асинхронная скорость 1500 об / мин (4 полюса) Y-801-4 0.55 0,75 1,51 1390 Y-802-4 0,75 1 2,01 1390 Y-90S-4 1,1 1,5 2,75 1400 Y-90L-4 1.5 2 3,65 1400 Y-100L1-4 2,2 3 5,03 1430 Y-100L2-4 3 4 6,82 1430 Y-112M-4 4 5.5 8,77 1440 Y-132S-4 5,5 7,5 11,6 1440 Y-132M-4 7,5 10 15,4 1440 Y-160M-4 11 15 22.6 1460 Y-160L-4 15 20 30,3 1460 Y-180M-4 18,5 25 35,9 1470 Y-180L-4 22 30 42.5 1470 380 В 50 Гц Асинхронная скорость 1000 об / мин (6 полюсов) Y-801-6 0,37 0,5 1,2 900 Y-802-6 0,55 0,75 1,45 900 Y-90S-6 0.75 1 2,25 910 Y-90L-6 1,1 1,5 3,16 910 Y-100L-6 1,5 2 3,97 940 Y-112M-6 2.2 3 5,61 940 Y-132S-6 3 4 7,23 960 Y-132M1-6 4 5,5 9,4 960 Y-132M2-6 5,5 7.5 12,6 960 Y-160M-6 7,5 10 17 970 Y-160L-6 11 15 24,6 970 Y-180M-6 15 20 31.4 970 .






















