
Импульсная модуляция — Физическая энциклопедия
ИМПУЛЬСНАЯ МОДУЛЯЦИЯ — изменение параметров импульсных сигналов во времени или в пространстве. Обычно И. м. представляет собой разновидность модулированных колебаний, где в качестве «переносчика» информации используется последовательность импульсов. Вид И. м. определяется законом изменения параметров (амплитуды, длительности, фазы, частоты следования) импульсных сигналов. В соответствии с этим (рис. 1) различают 4 осн. вида И. м.: амплитудно-импульсную, широтно-импульсную, фазово-импульсную и частотно-импульсную модуляции.
И. м. используют в технике связи, где в ряде случаев она позволяет реализовать большую помехоустойчивость
по сравнению с той, к-рая может быть получена, когда переносчиком информации служат гармонич. сигналы. И. м. нашла применение в системах и устройствах вычислит. и информационно-измерит. техники с цифровым (дискретным) представлением аналоговых сигналов, в частности в аналогово-цифровых преобразователях, цифровых фильтрах и др. устройствах.
устройствах.
Рис. 1. Различные виды импульсной модуляции: а — немодулированная последовательность импульсов; б — модулирующий (информационный) сигнал; в — амплитудно-импульсная модуляция; г — широтно-импульсная модуляция; д — частотно-импульсная модуляция; г — фазово-импульсная модуляция.
В системах оптич. и ВЧ-радиолокации и связи И. м. применяют для модуляции гармонич. сигналов (см. Амплитудная модуляция ).В этом случае возможна реализация сложных видов И. м., когда наряду с изменением параметров огибающей (последовательности импульсов) используется модуляция ВЧ-заполнения импульсов. Примером такой И. м. может служить линейно-частотная модуляция (рис. 2), реализующая изменение частоты заполнения по линейному закону.
Рис. 2. Линейно-частотная модуляция: а-форма сигнала; б -закон изменения частоты заполнения (w0 — несущая частота; wд— девиация частоты).
В радиолокации И. м. позволяет не только сформировать мощные кратковрем.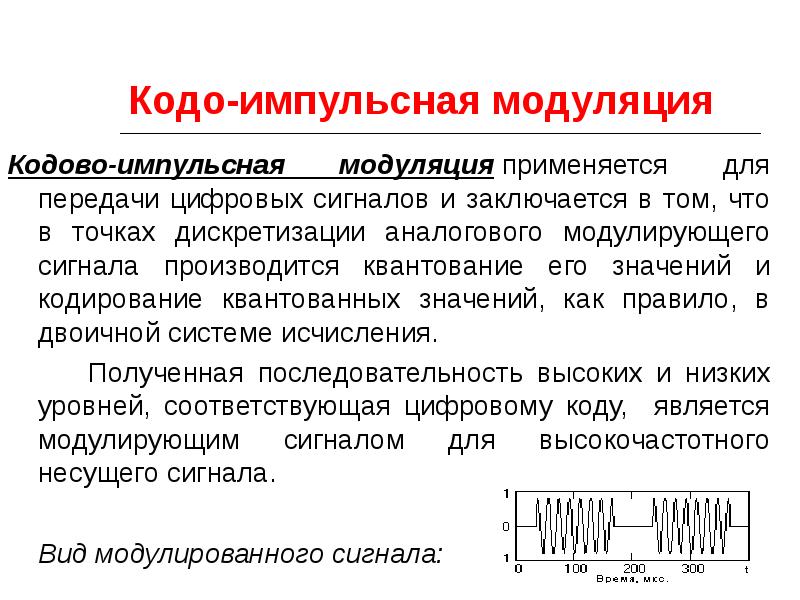 излучения для обнаружения и определения параметров движения целей, но и получить конкретные оценки их размеров, конфигурации, скорости вращения вокруг центра тяжести. И. м. используют также для идентификации физических параметров (темп-ры, плотности, степени ионизации и т. д.) разл. объектов и сред.
излучения для обнаружения и определения параметров движения целей, но и получить конкретные оценки их размеров, конфигурации, скорости вращения вокруг центра тяжести. И. м. используют также для идентификации физических параметров (темп-ры, плотности, степени ионизации и т. д.) разл. объектов и сред.
Лит.: Харкевич А. А., Основы радиотехники, М., 1963; Ицхоки Я. С., Овчинников Н. И., Импульсные и цифровые устройства, М., 1973; Баскаков С. И., Радиотехнические цепи и сигналы, М., 1983. Ю. К. Богатырёв.
Предметный указатель
>>
Модуляция импульсная — Энциклопедия по машиностроению XXL
Флуктуации интенсивности пучка, вызванные рассеянием на турбулентных неоднородностях, с пространственными масштабами, равными и меньшими размера пучка, наводят флуктуации диэлектрической проницаемости. Это может приводить к пространственной модуляции импульсного излучения (см. гл. 2), а также к изменению пространственной статистики и энергетических параметров и в непрерывных пучках. Однако этот эффект мало изменяет эффективные характеристики пучков [23].
[c.79]
Однако этот эффект мало изменяет эффективные характеристики пучков [23].
[c.79]
Модуляция импульсного носителя возможна по амплитуде (АИМ), частоте (ЧИМ), фазе (ФИМ), длительности или ширине импульсов (ДИМ, ШИМ). Особым видом модуляции является кодово-импульсная (КИМ).
[c.94]
Модуляция импульсная 24 Мощность касательная 8 [c.253]
Частотная и фазовая модуляции и другие близкие проблемы рассмотрены в задачах 6.27—6.32. (Существует еще один важный вид модуляции—импульсно-кодовая модуляция ).) [c.254]
Если предположить, что цель находится где-нибудь на окружности с точками 1—8, то модуляция импульсных сигналов будет наибольшей, а фаза сигналов (например, по- [c.39]
Лазерную резку материалов осуществляют как в импульсном, так и в непрерывном режиме. При резке в импульсном режиме непрерывный рез получается в результате наложения следующих друг за другом отверстий. Наиболее широкое применение получила резка тонкопленочных пассивных элементов интегральных схем, например, с целью точной подгонки значений их сопротивления или емкости. Для этого применяют импульсные лазеры на алюмо-иттриевом гранате с модуляцией дробности, лазеры на углекислом газе. Импульсный характер обработки обеспечивает минимальную глубину прогрева материала и исключает повреждение подложки, на которую нанесена пленка. Лазерные установки различных типов позволяют вести обработку при следующих режимах энергия излучения 0,1. .. 1 МДж, длительность импульса 0,01. .. 100 мкс, плотность потока излучения до 100 мВт/см, частота повторения импульсов 100. .. 5000 импульсов в 1 G. В сочетании с автоматическими управляющими системами лазерные установки для подгонки резисторов обеспечивают производительность более 5 тысяч операций за 1 ч. Импульсные лазеры на алюмо-иттриевом гранате применяют также
[c.299]
Наиболее широкое применение получила резка тонкопленочных пассивных элементов интегральных схем, например, с целью точной подгонки значений их сопротивления или емкости. Для этого применяют импульсные лазеры на алюмо-иттриевом гранате с модуляцией дробности, лазеры на углекислом газе. Импульсный характер обработки обеспечивает минимальную глубину прогрева материала и исключает повреждение подложки, на которую нанесена пленка. Лазерные установки различных типов позволяют вести обработку при следующих режимах энергия излучения 0,1. .. 1 МДж, длительность импульса 0,01. .. 100 мкс, плотность потока излучения до 100 мВт/см, частота повторения импульсов 100. .. 5000 импульсов в 1 G. В сочетании с автоматическими управляющими системами лазерные установки для подгонки резисторов обеспечивают производительность более 5 тысяч операций за 1 ч. Импульсные лазеры на алюмо-иттриевом гранате применяют также
[c.299]
ИМПУЛЬСНО-КОДОВАЯ МОДУЛЯЦИЯ (ИКМ), Применяется равномерная периодическая дискретизация сигнала х(/)во времени, в результате которой образуется последовательность
[c. 19]
19]
Лазер на кристалле рубина работает обычно в импульсном режиме. Различают два режима работы рубинового лазера режим свободной генерации и режим с модуляцией добротности. Работа рубинового лазера в режиме свободной генерации продолжается до тех пор, пока интенсивность излучения импульсной лампы не станет слишком малой и уровень инверсной населенности не упадет ниже порогового. Обычно стандартные рубиновые кристаллы длиной в несколько сантиметров при диаметре 1 с.м позволяют получить в этом режиме полную энергию в импульсе излучения порядка нескольких джоулей. Длительность самого импульса генерации при этом измеряется миллисекундами и, следовательно, средняя мощность излучения генератора порядка нескольких киловатт. [c.283]
В 50-х годах большие работы велись по созданию новых и более совершенных типов электронных усилителей, транзисторных преобразователей и усилителей мощности с широтно-импульсной модуляцией и с фазовым способом управления, а также по созданию порошковых, фрикционных и гистерезисных электромагнитных муфт. [c.266]
[c.266]
Для систем, съем данных в которых происходит в течение конечного интервала времени, удалось, используя аппарат разностных уравнений и дискретного преобразования Лапласа, разработать методы исследования их устойчивости и построения процессов в этих системах. В дальнейшем, благодаря применению некоторых теорем дискретного преобразования Лапласа, оказалось возможным свести изучение этого класса систем к изучению обычных импульсных систем с мгновенным съемом данных. Если на первых порах теория импульсных систем заимствовала методы и приемы у теории непрерывных систем, то в настоящее время она успешно решила ряд задач по синтезу оптимальных линейных импульсных систем при учете неизменной части системы, которые в теории непрерывных линейных систем до сих пор остаются нерешенными. Наличие неизбежно присутствующих или преднамеренно вводимых нелинейностей ограничивает возможности применения линейной теории импульсных систем. Особенно это относится к системам с широтно- и частотно-импульсной модуляциями, а также к системам, содержащим в качестве элемента цифровые вычислительные устройства при учете ограничений памяти и небольшом числе разрядов. [c.270]
[c.270]
ПИА-10, построенный по методу широтно-импульсной модуляции с последующим интегрированием. [c.440]
По принципу регулирования импульсные стабилизаторы с широтно-импульсной модуляцией делятся на два основных класса [1] [c.331]
Рассмотренную зависимость L и С от типа ШИМ необходимо учитывать при разработке импульсных стабилизаторов. Когда к весу и габаритам стабилизатора предъявляются жесткие требования, необходимо применять ШИМ с постоянной частотой модуляции. [c.336]
Если магнитный усилитель, используемый в качестве ШИМ импульсного стабилизатора, включить таким образом, чтобы напряжение питания его рабочей цепи было прямо пропорционально входному напряжению импульсного стабилизатора, т. е. если 17=я , то напряжение на выходе стабилизатора (с полной модуляцией) определяется выражением [c.338]
Стекло с Nd 1,06 Импульсный с модуляцией добротности 1—15 (средняя) 10 (пиковая) 10 1 30 мин 5 мин» 0,5—10 МС 0,5—1 МС 10—60 КС Сварка, сверление Сверление, резка Испарение
[c.![]() 106]
106]
ИАГ 1,06 Непрерывный Импульсный С модуляцией добротности 1—1100 1—100 (средняя) 500—5-10 (пиковая) 1—100 (1-10) 103 0,01—5 МС 150—300 МС Испарение, сварка, резка Сварка, сверление Испарение [c.106]
СО2 —Na-He 10,6 Непрерывный Импульсный С модуляцией добротности 50—10-103 1—250 (средняя) Ю» (пиковая) 1-1-103 200—500 5—150 МКС 30—300 МС Резка, сварка, термообработка Сверление Испарение, сварка [c.106]
В настоящее время для сверления отверстий используются в основном лазеры на ИАГ. Они обеспечивают частоту следования импульсов до 1000 Гц и мощность в непрерывном режиме от 1 до 10 Вт, в импульсном — до сотен киловатт, а в режиме с модуляцией добротности — до нескольких мегаватт. [c.132]
Система оснащена пакетом модульных программ, обеспечивающих виброакустический контроль и диагностирование дефектов контактирующих поверхностей (питтинг, заедание, абразивный износ) зубчатых механизмов, подщипников качения и скольжения, повреждений лопаток турбины, лопастей насоса и других роторных механизмов. Пакет прикладных программ обеспечивает распознавание технических состояний на основе сравнения мер близости — мерных векторов диагностических признаков с эталонными векторами. Диагностические признаки формируются из спектральных компонент гармонического ряда характерных частот спектров амплитудной, частотной и амплитудно-импульсной модуляции и из вероятностных характеристик виброакустического сигнала.
[c.229]
Пакет прикладных программ обеспечивает распознавание технических состояний на основе сравнения мер близости — мерных векторов диагностических признаков с эталонными векторами. Диагностические признаки формируются из спектральных компонент гармонического ряда характерных частот спектров амплитудной, частотной и амплитудно-импульсной модуляции и из вероятностных характеристик виброакустического сигнала.
[c.229]
Принцип действия устройства передачи информации основан на амплитудно-импульсной модуляции информационных электрических сигналов и временном разделении каналов.
[c.229]
Магнитометр феррозондовый типа второй гармоники с широтно-импульсной модуляцией построен но функциональной схеме на рис. 54. На рисунке показано / — датчик (ФЭ) 2 —переключатель компонент 5 — полосовой фильтр — усилитель [c.147]
В статье выделяются основные типы структурных состояний импульсных систем многоцелевого назначения. Дается математическое описание основных структурных состояний систем с управлением временной модуляцией импульсной последовательности. Библ. 5 назв.
[c.522]
Библ. 5 назв.
[c.522]
Подробный анализ каналов связи с ЧИМ затруднителен, поскольку она связана с нелинейным процессами. Кроме того, существует несколько различных видов используемой модуляции (модуляция импульсной последовательности по частоте или фазе сохранение постоянными либо длительности импульса, либо рабочего цикла гфи изменении частоты или фазы частотная или фазовая модуляция синусоидальной поднесущей), а также различные способы осуществления модуляции и демодуляции. Поэтому здесь не делается попытка количественно оценить ожидаемые шумовые характеристики оптической линии с ЧИМ. Достаточно сказать, что они аналогичны характеристикам обычных радиоканалов с частотной модуляцией, которые описаны в большинстве учебников по связи (см. например, 1.3]). Заметим, что величина К, определяемая выражениями (14.4.10), (14.5.14) и (17.4.5) характеризует отношение мощности несущего колебания к мощности шума в полосе пропускания канала. Использование широкополосной частотной модуляции, при которой девиация частоты в большой степени сопоставима с пгириной спектра сигнала, приводит к значительному уменьшению требуемого отношения сигнал-шум, при условии, что отношение мощности несущей к мощности шума превышает некоторое пороговое значение, достаточное для того, чтобы обеспечить надежную регенерацию импульса. [c.457]
[c.457]
Для формирования библиотеки моделей регуляторов напряжения (PH) следует учесть, что в транспортных ЭЭС используются регуляторы трех конструктивных исполнений на магнитных усилителях, транзисторно-тиристорные и транзисторные с широтно-импульсной модуляцией. В библиотеке моделей преобразователей Пр должны быть включены модели трансформаторов Три трансформаторно-выпрямительных устройств ТВУ. В библиотеке П должны быть учтены типовые нагрузки транспортных ЭЭС симметричные и несимметричные активноиндуктивные нагрузки, двигатели асинхронные и постоянного тока, импульсные нагрузки. [c.227]
Для демонстрации широких возможиостей ППП Динамика ЭЭС представляются примеры моделирования ЭЭС, структурно-функциональная схема которой дана на рис. 7.11. На рис. 7.13, а приведены кривые переходных процессов по напряжению СГ для случая PH с широтно-импульсной модуляцией и импульсной активно-индуктивной нагрузкой. Параметры нагрузки характеризуются коэффициентом мощности 0,9 диапазоном относительного изменения 0,4—1,0 длительностью импульса 20 м-с длительностью паузы 5 м/с.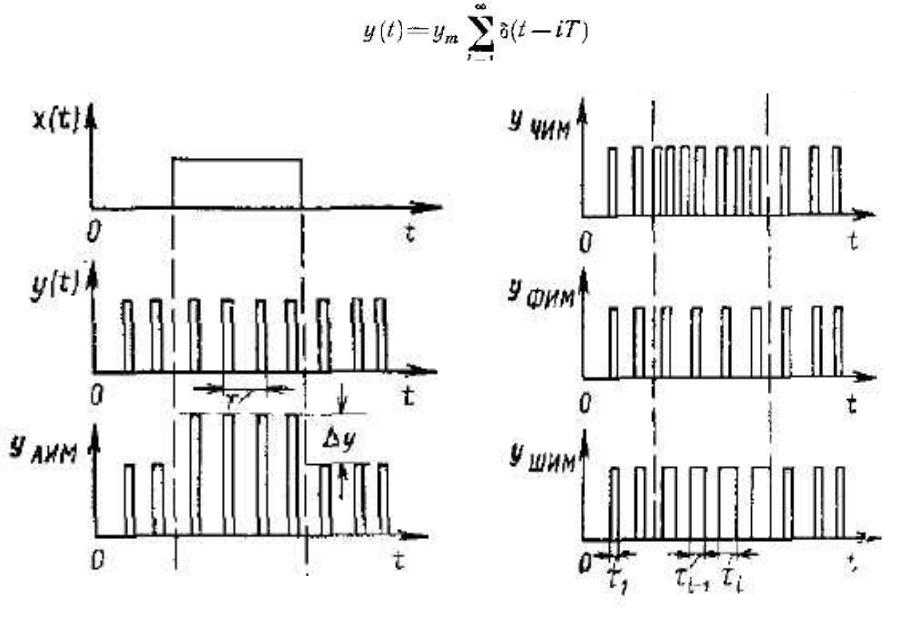 Последовательность моделируемых режимов такова включение возбуждения СГ, наброс статической нагрузки мощностью 0,4 от номинальной мощности, включение импульсной нагрузки.
[c.230]
Последовательность моделируемых режимов такова включение возбуждения СГ, наброс статической нагрузки мощностью 0,4 от номинальной мощности, включение импульсной нагрузки.
[c.230]
Аппаратура ДАТА временного уплотнения с кодо-импульсной модуляцией позволяет образовать пучок телеграфных каналов на одной 2-проводной городской соединительной линии сети ГТС. [c.151]
Для варикондов в слабых полях удельная объемная проводимость у = 10 12 /ом-см.-, при частоте 1000 гц tg 6 = 0,04 при повышении частоты свыше 10 гц наблюдается снижение диэлектрической проницаемости у ВК-2 при частоте 3-10 гц величина е ниже на 45% по сравнению со значением при /= 10 гц. Материалы типа ВК-2 и ВК-5 предназначаются для нелинейных элементов в преобразователях частоты, усилителях, стабилизаторах, в системах частотной модуляции, в импульсных схемах и т. п. Материалы типа БК-6 обладают [c.156]
Цифровые автоматические системы могут рассматриваться как особый случай нелинейных импульсных систем, в которых нелинейность, определяющая квантование по уровню, носит ступенчатый характер.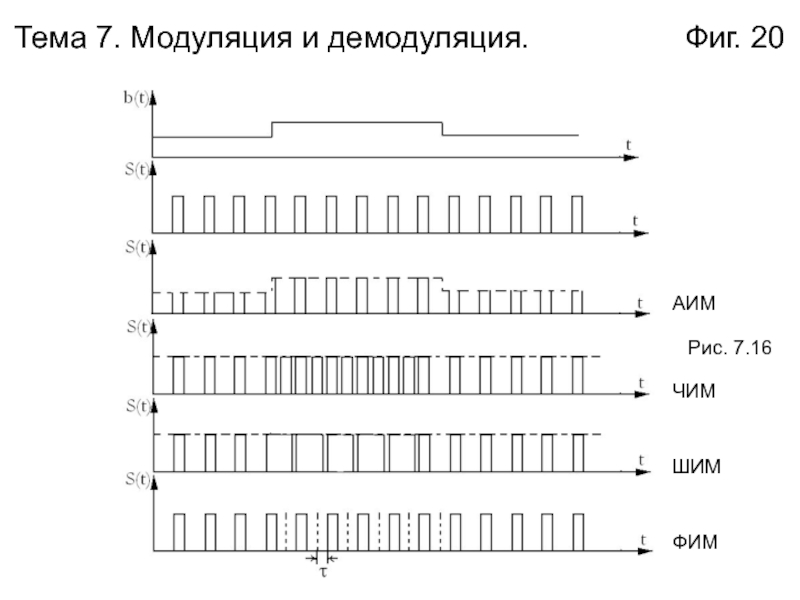 Возможны детерминистическая и вероятностная оценки этого эффекта. К цифровым автоматическим системам непосредственно применимы методы исследования устойчивости и периодических режимов нелинейных импульсных систем. Для выбора оптимальных управляющих воздействий в цифровых автоматических системах наиболее удобным оказался метод динамического программирования. Одной из важных задач, возникающих при проектировании цифровых автоматических систем, является задача передачи информации на основе метода приращений и полной передачи уровней. Поэтому необходимо было выяснить возможные пути повышения эффективности и сравнить помехоустойчивость различных методов дискретной передачи информации (дельтамодуляции, разностно-дискретной и импульсно-кодовой модуляций). Проведенный сравнительный анализ этих типов модуляции позволяет произвести обоснованный выбор при различных условиях их использования.
[c.271]
Возможны детерминистическая и вероятностная оценки этого эффекта. К цифровым автоматическим системам непосредственно применимы методы исследования устойчивости и периодических режимов нелинейных импульсных систем. Для выбора оптимальных управляющих воздействий в цифровых автоматических системах наиболее удобным оказался метод динамического программирования. Одной из важных задач, возникающих при проектировании цифровых автоматических систем, является задача передачи информации на основе метода приращений и полной передачи уровней. Поэтому необходимо было выяснить возможные пути повышения эффективности и сравнить помехоустойчивость различных методов дискретной передачи информации (дельтамодуляции, разностно-дискретной и импульсно-кодовой модуляций). Проведенный сравнительный анализ этих типов модуляции позволяет произвести обоснованный выбор при различных условиях их использования.
[c.271]
В первых наших типовых системах радиорелейной связи (1945—1946 гг.), предназначенных для 12 телефонных каналов, использовалась длина волны 20 см и импульсно-фазовая модуляция. Затем был разработан ряд других систем Стрела П на 12 каналов с частотной модуляцией (1954 г.), Стрела М на 24 канала с тем же видом модуляции (1956 г.) и Стрела Т для трансляции телевидения (1956 г.). Работы, проведенные под руководством С. В. Бороздича, закончились созданием в 1957 г. аппаратуры Р-60/120 (диапазон волн 15—18,8 см) с двумя телефонными дуплексными стволами и одним симплексным телевизионным стволом (дальность действия телефонии — 2500 км, телевидения — 1000 км). Разработанная под руководством Н. Н. Каминского (1958 г.) радиорелейная аппаратура большой емкости Р-600 ( Весна ) стала основным оборудованием радиорелейных магистральных линий союзного значения (диапазон волн 7,7—8,8 см, 4 рабочих дуплексных ствола, 2 ствола — резерва, 1 ствол для служебной связи емкость телефонного ствола — 600 телефонных каналов дальность действия — 2500 км). Разработки еш е более емких радиорелейных линий продолжаются.
[c.385]
Затем был разработан ряд других систем Стрела П на 12 каналов с частотной модуляцией (1954 г.), Стрела М на 24 канала с тем же видом модуляции (1956 г.) и Стрела Т для трансляции телевидения (1956 г.). Работы, проведенные под руководством С. В. Бороздича, закончились созданием в 1957 г. аппаратуры Р-60/120 (диапазон волн 15—18,8 см) с двумя телефонными дуплексными стволами и одним симплексным телевизионным стволом (дальность действия телефонии — 2500 км, телевидения — 1000 км). Разработанная под руководством Н. Н. Каминского (1958 г.) радиорелейная аппаратура большой емкости Р-600 ( Весна ) стала основным оборудованием радиорелейных магистральных линий союзного значения (диапазон волн 7,7—8,8 см, 4 рабочих дуплексных ствола, 2 ствола — резерва, 1 ствол для служебной связи емкость телефонного ствола — 600 телефонных каналов дальность действия — 2500 км). Разработки еш е более емких радиорелейных линий продолжаются.
[c.385]
По выражениям (3), (4), (7) и (8) построены диаграммы (рис. 2), из которых наглядно видно влияние способа модуляции на величины L и L фильтра для различных к и S. Значения индуктивности L и величины L для импульсных стабилизаторов с ШИМ-П и ШИМ-1П больше значений L и L для импульсных стабилизаторов с ШИМ-1 при 7 min= onst и прочих равных условиях. Чем больше /с и б, тем заметнее становится эта разница, которая достигает значительной величины (в 2—5 раз и более).
[c.335]
2), из которых наглядно видно влияние способа модуляции на величины L и L фильтра для различных к и S. Значения индуктивности L и величины L для импульсных стабилизаторов с ШИМ-П и ШИМ-1П больше значений L и L для импульсных стабилизаторов с ШИМ-1 при 7 min= onst и прочих равных условиях. Чем больше /с и б, тем заметнее становится эта разница, которая достигает значительной величины (в 2—5 раз и более).
[c.335]
В качестве широтно-импульсного модулятора, позволяющего образовать два канала регулирования и одновременно обеспечить постоянство частоты модуляции, может быть использован магнитный усилитель с самонасыщением [6]. При зтом магнитный усилитель включается таким образом, что за счет зависимости времени пере-магничивания сердечников от входного напряжения стабилизатора образуется параметрический канал регулирования. [c.336]
Такое погружение само по себе не является новым как уже отмечалось, в теневых дефектоскопах колебания вводятся в металл в основном именно таким образом, однако для импульсного эхо-метода погружение представляет особые выгоды прежде всего потому, что отпадают проблемы акустического контакта и износоустойчивости искательных головок контакт получается постоянным и весьма надежным, в результате чего теряет свое значение донный сигнал как основной индикатор надежности акустического контакта и появляется возможность ввода УЗК в изделие под любым углом к поверхности.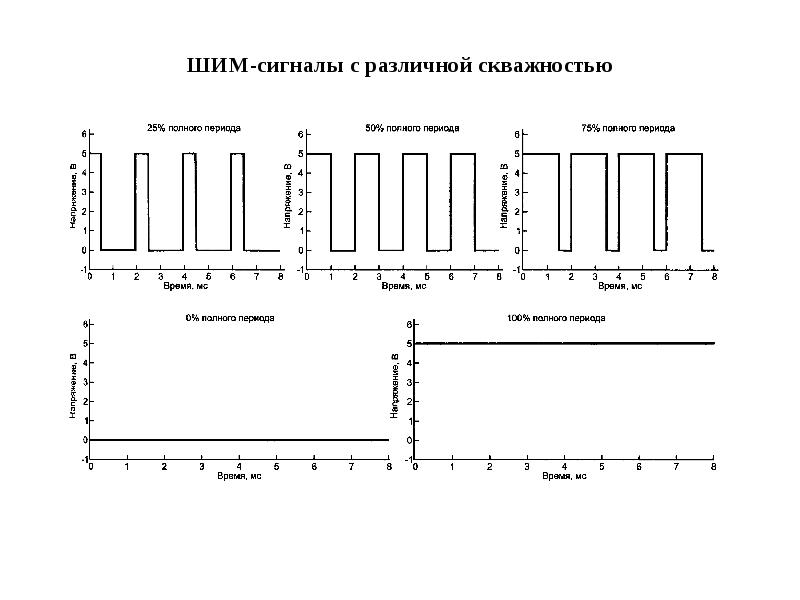 Вследствие этого можно снизить требования к чистоте обработки поверхности изделия, так как колебания вводятся достаточно эффективно в изделие с грубой поверхностью (например, в необработанную поковку). При достаточной мощности зондирующего импульса можно поэтому использовать УЗК значительно более высоких частот, порядка 20—25 мгц, что, в свою очередь, приводит к повышению чувствительности и разрешающей способности метода. При иммерсионном варианте значительно облегчается запись показаний дефектоскопа, а применение в осциллоскопическом индикаторе электроннолучевой трубки с большой длительностью послесвечения и развертки типа В (модуляция электронного луча по яркости) позволяет видеть на экране изображение контуров контролируемого изделия ij дефектов в прозвучиваемом сечении.
[c.348]
Вследствие этого можно снизить требования к чистоте обработки поверхности изделия, так как колебания вводятся достаточно эффективно в изделие с грубой поверхностью (например, в необработанную поковку). При достаточной мощности зондирующего импульса можно поэтому использовать УЗК значительно более высоких частот, порядка 20—25 мгц, что, в свою очередь, приводит к повышению чувствительности и разрешающей способности метода. При иммерсионном варианте значительно облегчается запись показаний дефектоскопа, а применение в осциллоскопическом индикаторе электроннолучевой трубки с большой длительностью послесвечения и развертки типа В (модуляция электронного луча по яркости) позволяет видеть на экране изображение контуров контролируемого изделия ij дефектов в прозвучиваемом сечении.
[c.348]
Рубин 0,6943 Импульсный С модуляцией добротности 1—20 (средняя) 10 (пиковая) 108 1 1 1 0,3—6 МС 0,3—2 МС 5—50 НС Сварка, сверление Р1спарение [c.106]
Технические характеристики ПЛПУ следующие число каналов связи 1 дальность действия не менее 100 число лучей в передатчике 2 частота следования импульсов 10 кГц, используется частотно-импульсная модуляция масса одного устройства не более 2 кг электропитание 60 и 9 В.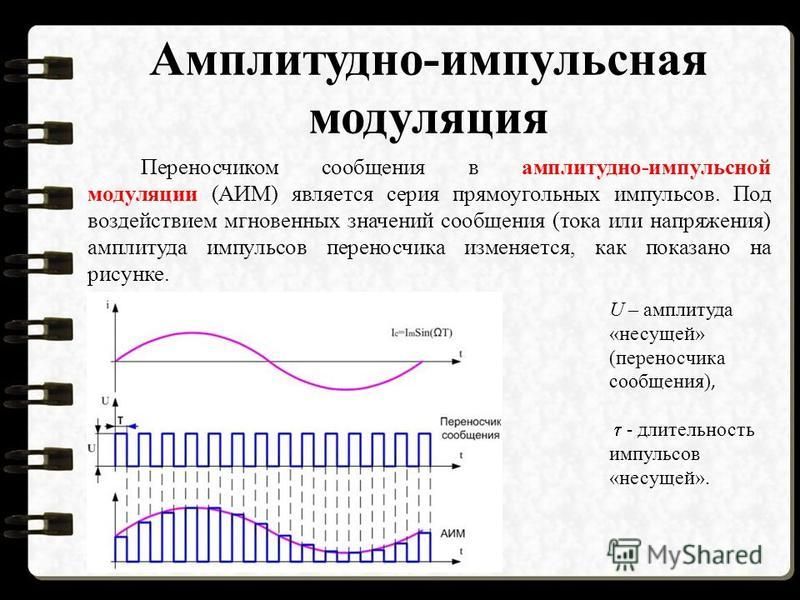 [c.320]
[c.320]
В ИМАШ АН СССР проведены теоретические и экспериментальные исследования, позволившие выявить закономерности изменения информационных свойств виброакустических процессов при наличии дефектов монтажа и развития деградационных явлений при эксплуатации машин. Разработанные методы обнаружения и диагностирования зapoждaюш x я эксплуатационных дефектов основаны на анализе свойств вынужденных и собственных колебаний дефектных узлов. Проведенная при этом >-нифи-кация методов диагностирования дефектов на ранней стадии их развития базируется, в частности, на том, что для узлов трения (подшипники скольжения и качения, зубчатые зацепления и т.п.) основным деградационным эффектом, приводящим к отказу, является развитие локальных повреждений контактируемых поверхностей (выкрашивания, задиры, трещины). Установлено, в частности, что при всех видах дефектов развитие повреждений сопровождается увеличением глубины амплитудно-импульсной модуляции в зоне собственной частоты дефектного узла. [c.27]
[c.27]
В качестве примера на рис. 8 приведены спектры амплитудно-импульсной модуляции вибраций подшипника скольжения на собственной частоте узла при его нормальной работе (/ — исходное состояние), при зарож- [c.27]
Принцип действия тензотелеметрического токосъемника основан на преобразовании информационных электрических сигналов, поступающих от тензодатчиков в телеметрические сигналы с частотно-импульсной модуляцией (ЧИМ), бесконтактной передаче их к приемной стационарной аппаратуре и преобразовании ЧИМч игналов в исходную форму информационных сигналов. [c.242]
Для управления автономным манипуля](ионно-транспортным роботом от ЭВМ используется широтно-импульсная модуляция. При этом управляюии1е сигналы кодируются в форме длительности импульсов, которая может изменяться в пределах от 1,2 до 4 мс. Передача управ,ляющих сигналов на электродвигатели исполнительных приводов в таком модулированном виде очень удобна. [c.209]
[c.209]
Широтно-импульсная модуляция (ШИМ) | Класс робототехники
Как нам уже известно из первых уроков, любой микроконтроллер умеет хорошо работать с цифровыми сигналами. Он легко справляется с арифметическими операциями над цифровыми данными, принимает и передаёт цифровые сигналы по линиям связи. А что значит «цифровые» в данном случае?
В самом первом уроке мы зажигали и гасили светодиод с помощью Ардуино. Для того, чтобы зажечь светодиод, мы подавали на его анод высокий уровень сигнала. А чтобы погасить — низкий уровень. Получается, для управления мы использовали только два уровня напряжения: высокий и низкий. Светодиод либо будет гореть, либо не будет. Третьего — не дано. Оперируя только двумя состояниями означает, что мы работаем с цифровым сигналом.
Но что делать, если нам нужно зажечь этот самый светодиод только на половину яркости? Или запустить двигатель, на 30% его мощности? Для решения этой задачи используют подход, называемый широтно-импульсной модуляцией сигнала. О том, что такое ШИМ и как это работает, мы узнаем на сегодняшнем уроке.
О том, что такое ШИМ и как это работает, мы узнаем на сегодняшнем уроке.
Широтно-импульсная модуляция — ШИМ
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент (а кто-то может и натуральный — ничего сложного). Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим.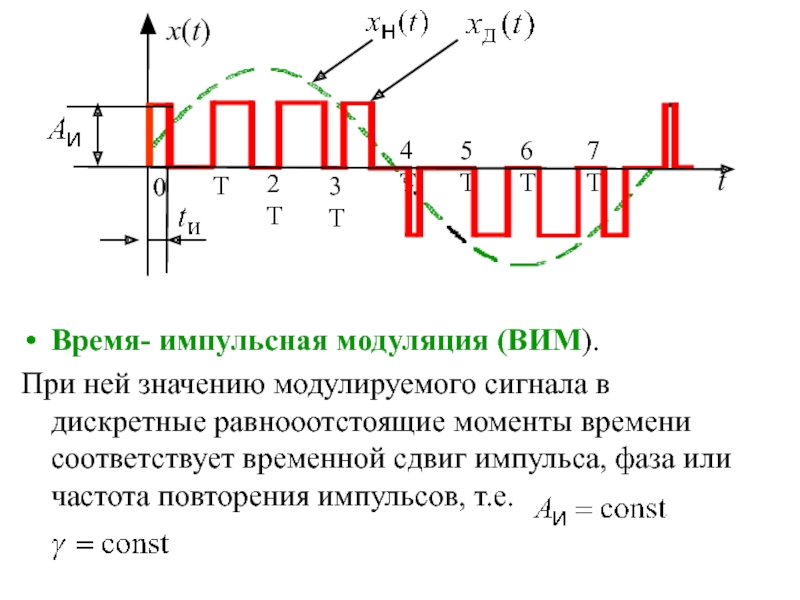 Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Разумеется, в силу человеческой медлительности, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет «плавать» вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.
Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.
Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
Коэффициент заполнения (duty cycle)
Начнем с самого главного параметра — коэффициента заполнения D (он же duty cycle). Этот коэффициент равен отношению периода ШИМ сигнала к ширине импульса:
D = T / tвкл
Пример ШИМ сигнала для разных значений D:
Чем больше D, тем больше мощности мы передаем управляемому устройству, например, двигателю. Так, при D = 1 двигатель работает на 100% мощности, при D = 0,5 — наполовину мощности, при D = 0 — двигатель полностью отключен.
Кстати, кроме коэффициента заполнения для характеризации ШИМ применяют и другой параметр — скважность S. Эти два параметра связаны выражением:
Эти два параметра связаны выражением:
S = 1/T
Скважность, как и коэффициент заполнения — величина безразмерная. В отличие от D, она может принимать значения от 1 до бесконечности. Но чаще всего, особенно в англоязычных источниках, используют именно D.
Частота ШИМ
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.
В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Разрешение ШИМ
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
ШИМ и микроконтроллеры
Простейший генератор ШИМ можно собрать и без всяких микроконтроллеров, только лишь с микросхемой таймера 555.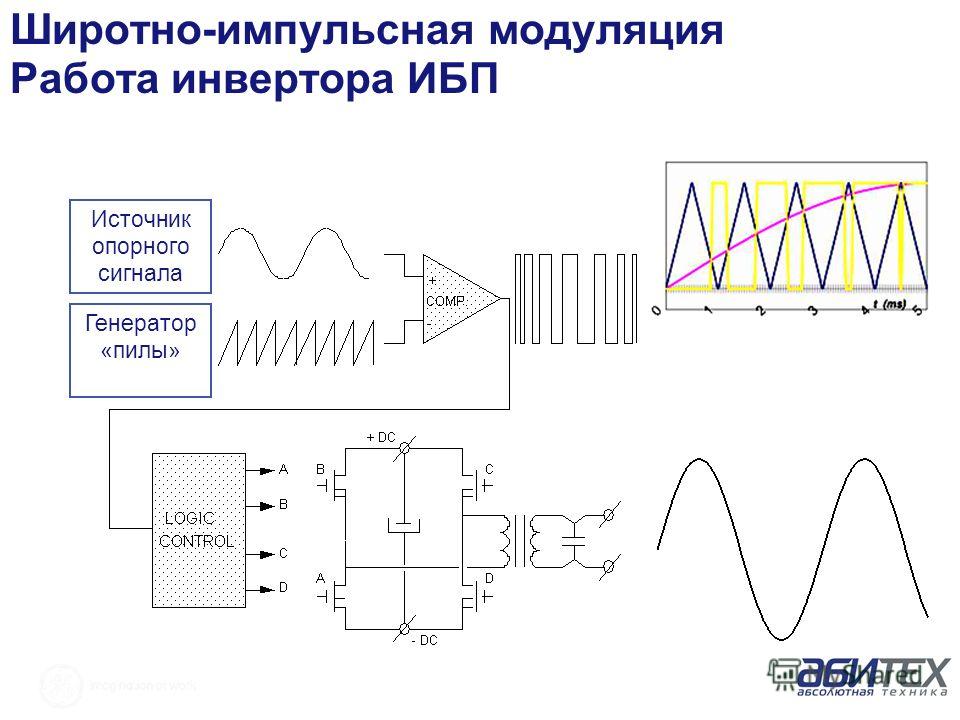 Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Например, у платы Ардуино имеется 6 контактов: 3, 5, 6, 9, 10 и 11, которые можно настроить для генерации аппаратного ШИМ. По-умолчанию, на контактах 5 и 6 частота сигнала будет 1кГц, на остальных — скромные 500Гц. Как ими пользоваться ШИМ на Ардуино подробно рассказывается на уроке «Ардуино: ШИМ» (скоро будет).
STM32F103 — гораздо более серьёзный микроконтроллер. У него целых 20 контактов имеют возможность генерации ШИМ. Частота этого микроконтроллера — 72МГц, что делает возможным плавное и точное управление моторами постоянного тока, не говоря уже о светодиодах. Узнаём подробности в уроке про STM32 и ШИМ.
Кстати, микроконтроллеры умеют не только генерировать ШИМ, но и детектировать подобные сигналы. Про это можно почитать в соответствующей статье на нашем портале (скоро будет).
Вконтакте
Широтно-импульсная модуляция (шим). аналоговая и цифровая
Импульсные источники питания
Импульсные источники питания (ИИП) также могут использовать ШИМ, хотя существуют и другие методы. Добавление схем, которые используют накопленную энергию в катушках индуктивности и конденсаторах, после основных переключающих компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышая 90%. Ниже приведен пример такой схемы.
Добавление схем, которые используют накопленную энергию в катушках индуктивности и конденсаторах, после основных переключающих компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышая 90%. Ниже приведен пример такой схемы.
Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Эффективность в этом случае измеряется как мощность. Если у вас есть импульсный источник питания с КПД 90%, и он преобразует 12 В постоянного напряжения в 5 В постоянного напряжения с током 10 ампер, то на стороне 12 В он будет потреблять ток примерно 4,6 А. 10% (5 Вт) будут выделяться в виде тепла. Будучи немного шумнее, этот тип стабилизаторов будет работать намного холоднее, чем его линейный аналог.
ШИМ – широтно-импульсная модуляция
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения (Ud)
Управление средним значением напряжения происходит путем изменения скважности импульсов
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем. В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности
В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности
Формула скважности:
где T – длительность периода, с;
t – время действия импульса (длительность), с;
D – коэффициент заполнения.
То есть, не смотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается. Эти величины безразмерны
Коэффициент заполнения обычно отображают в процентах (%).
Рисунок 1 – Скважность импульсов
На приведенном выше рисунке изображены импульсы, которые возникают с определенной периодичностью
Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр
Существуют цифровые и аналоговые ШИМ. Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – входное постоянное напряжение.
Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.
Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
Рисунок 2 – Скважность сигнала при однополярной ШИМ
Однополярная модуляция означает, что происходит формирование импульсов только положительной величины и имеет место нулевое значение напряжения. Осуществить такую модуляцию в некоторых схемах невозможно, преимущество однополярной модуляции: малое амплитудное значение высокочастотных гармоник.
В двухполярной модуляции вместо нулевого длительного напряжения формируется отрицательное напряжение, она проиллюстрирована на рисунке 4.
Преимущество использования ШИМ — это легкость изменения величины напряжения при минимальных потерях. Конечно же, можно, применять делитель напряжения, но его работа основана на применении резисторов, а на них происходит рассеивание энергии, что в свою очередь вызывает нагрев и неэкономичность (преобразование электрической энергии в тепловую).
Работа широтно-импульсного преобразователя реализуется с помощью полупроводниковых приборов – транзисторов. Максимальные потери на транзисторах бывают при их полуоткрытом состоянии. Поэтому используют два крайних положения: полностью открыты или закрыты, тогда потери минимальны. Частота срабатывания транзисторов очень большая, то есть переходные состояния имеют мало времени и потери, фактически, сводятся к нулю.
ШИМ нашел широкое применение как регулятор оборотов двигателей постоянного тока (ДПТ).
Рисунок 3 – Схема ШИМ регулятора для ДПТ
Схема ШИМ управления двигателя постоянного тока состоит из тиристорного преобразователя VS1÷VS6, сглаживающего конденсатора С. Транзисторы VT1÷VT4 реализуют подачу импульсного напряжения на двигатель постоянного тока М. С помощью обратных диодов VD1÷VD4, энергия будет отдаваться в сеть при торможении двигателя. Наличие в данной схеме четырех транзисторов дает возможность работы ДПТ во всех 4-х квадрантах механической характеристики.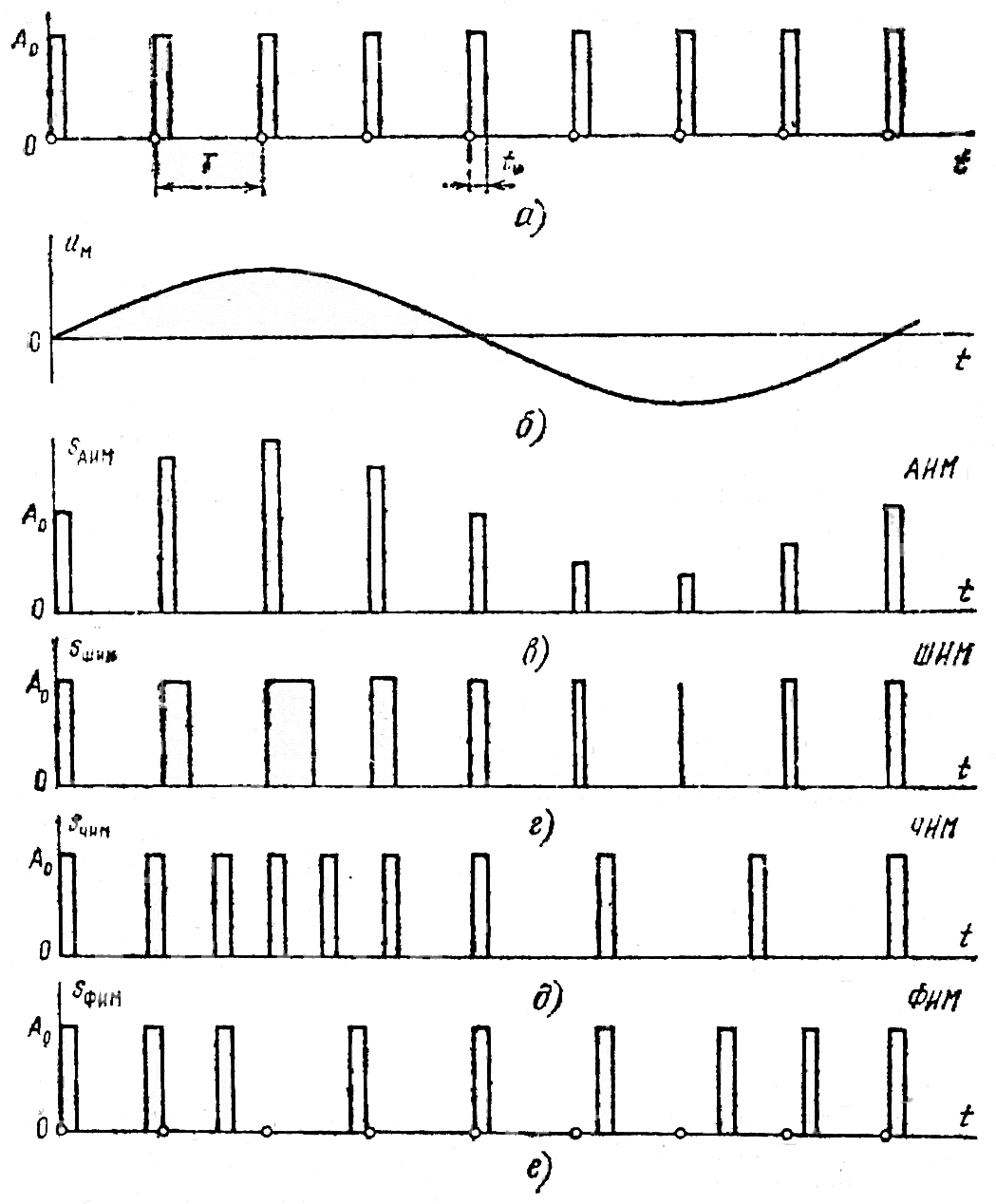
Принцип работы схемы основан на двухполярной модуляции:
Рисунок 4 – Двухполярная широтно-импульсная модуляция
Недостаточно прав для комментирования
ШИМ – широтно-импульсная модуляция
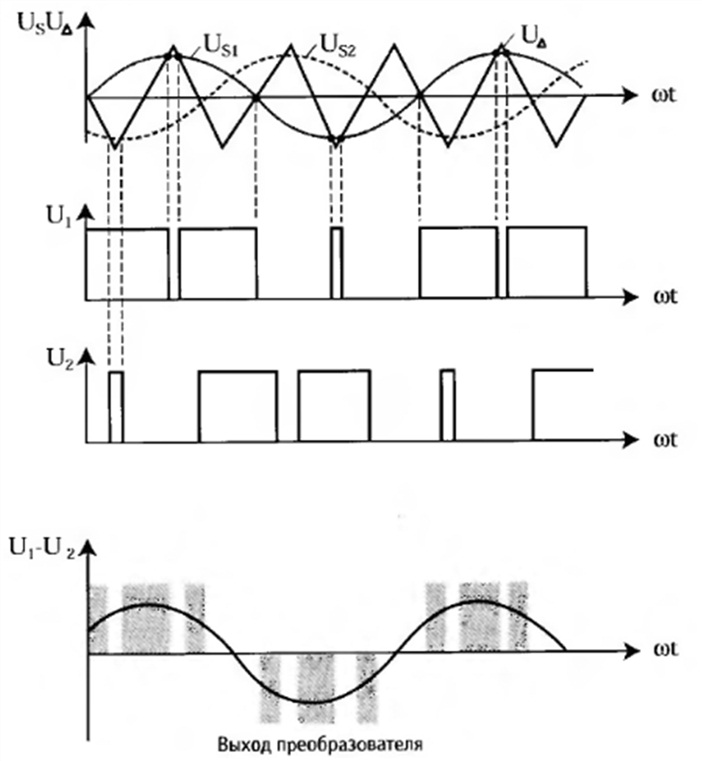
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения.
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным. Поэтому применяют ШИМ для получения синусоидально формы тока.
Поэтому применяют ШИМ для получения синусоидально формы тока.
Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов
Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
(PDF) ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ В ТРЕХФАЗНЫХ ИНВЕРТОРАХ НАПРЯЖЕНИЯ
выходного напряжения одинаковы как при постоянной, так и при
переменной частоте коммутации [6].
Способы повышения амплитуды основной гармоники выходного
напряжения. Наибольшее значение отношение действующего значения
основной гармоники фазного выходного напряжения АИН к напряжению
источника питания в рассмотренных выше разновидностях ШИМ равно
0,354. При этом в бестрансформаторном преобразователе частоты,
состоящем из неуправляемого мостового выпрямителя и инвертора по схеме
рис. 1,а, выходное напряжение не превышает 0,827 напряжения сети. В
реальных преобразователях это соотношение еще ниже, поскольку
коэффициент модуляции из-за необходимости выполнения условий
коммутации не достигает 1, имеются потери напряжения в преобразователе.
Поэтому задача повышения отношения основной гармоники выходного
напряжения инвертора к напряжению источника питания является весьма
актуальной.
Существует только один способ выполнения поставленной задачи – это
использование несинусоидального закона модуляции длительности
импульсов потенциалов фаз φA, φB и φC , причем выбор закона модуляции
должен обеспечивать увеличение амплитуды основной гармоники. Среди
законов модуляции, обеспечивающих повышение основной гармоники
можно назвать модуляцию по прямоугольному и трапециидальным законам.
Однако при их использовании гармонический состав фазного и линейного
выходных напряжений инвертора ухудшается: в низкочастотной области
спектра появляются гармоники искажения, прежде всего 5-я, 7-я, 11-я и 13-я
гармоники выходной частоты, которые содержатся в ШИМ-
последовательностях φA, φB и φC.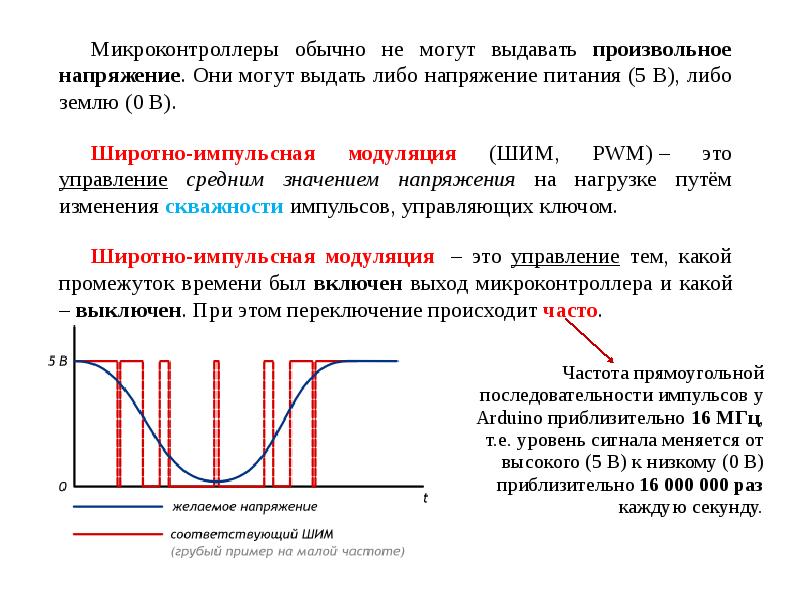 Содержащиеся в тех же
Содержащиеся в тех же
последовательностях гармоники, кратные трем, являются гармониками
нулевой последовательности и при симметричной нагрузке, согласно
выражению (2), не содержатся в фазных и линейных напряжениях нагрузки.
Отсюда вытекает идея предмодуляции: применение несинусоидального
закона для модуляции длительности импульсов потенциалов фаз φA, φB и φC ,
который обеспечивает увеличение амплитуды основной гармоники, при этом
в спектре ШИМ-последовательностей φA, φB и φC помимо основной
гармоники содержатся только гармоники нулевой последовательности, т.е.
гармоники, кратные трем. Таким образом обеспечивается отсутствие в
низкочастотной части спектра фазных и линейных напряжений инвертора
гармоник искажения.
Принцип предмодуляции лежит в основе широко известных способов
широтно-импульсного управления трехфазными инверторами с
симметричной нагрузкой:
ШИМ с предмодуляцией третьей гармоникой [2];
Опыт одного инженерного расследования / Хабр
Тема данного поста образовалась почти случайно, в процессе легкой дискуссии по поводу подходов к разработке програмного обеспечения в частности и устройств на МК в общем.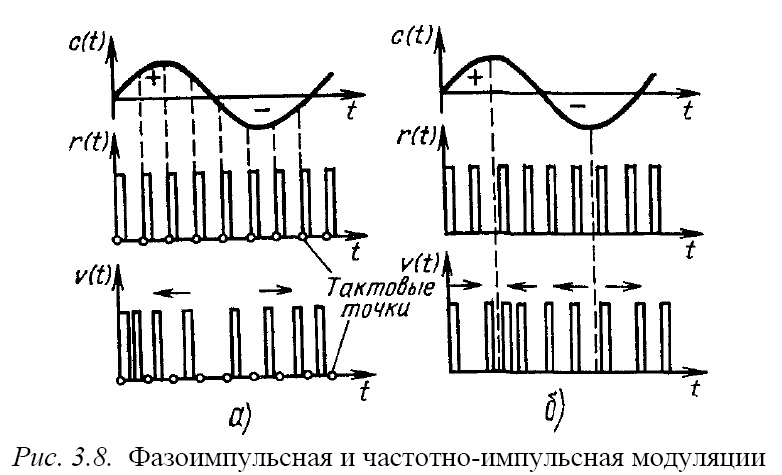 Желающие могут ознакомится с самой дискуссией
Желающие могут ознакомится с самой дискуссией
habrahabr.ru/company/coolrf/blog/222801
. Хотя обе стороны явно остались при своем мнении, тем не менее определенный вызов был брошен. Я вызовов не боюсь, любой челлендж уже сам по себе хорош, поскольку отвечая на него, ты в чем-то меняешься и, как правило, в лучшую сторону (вариант типа «а слабо выпить 10 литров пива за раз», который очевидно меняет человека НЕ в лучшую сторону, в моем возрасте уже не прокатывает). Итак, мы начинаем.
Имеется некоторая разработка диммера (устройства регулирования освещения), который должен получать управляющие сигналы от некоторого устройства по беспроводному каналу, конкретно ZigBee (далее ЗИГ). И вот в процессе проектирования данного устройства выяснилось, что основная программа собственно обеспечения диммирования не может сосуществовать на одном МК с библиотекой организации стека протоколов беспроводного интерфейса. Надо честно признаться (и я это сделал в комментариях), что на момент начала дискуссии я имел всего лишь общее представление о ЗИГ (к данному моменту это уже не вполне верно), но мой предыдущий инженерный опыт категорически возражал против принципиальной возможности существования подобного неразрешимого конфликта.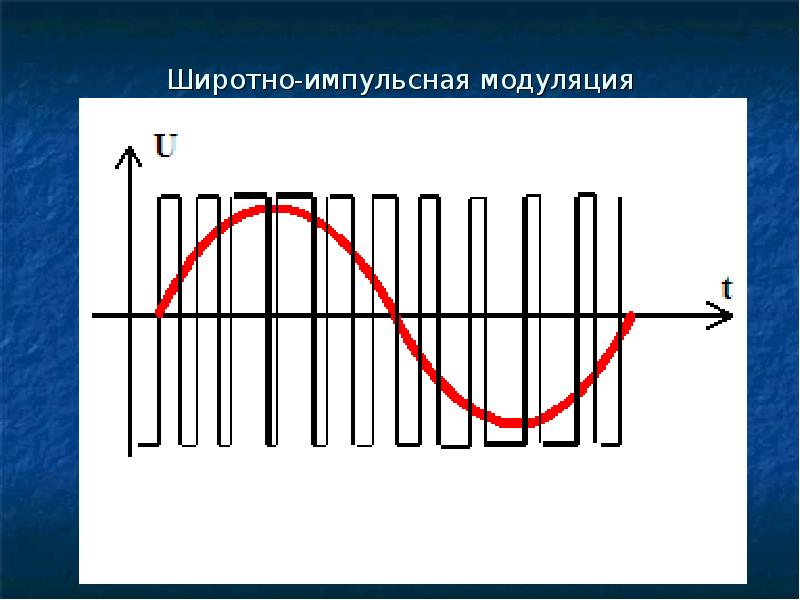
Давайте сделаем некоторые предположения о возможной сути конфликта. Сначала общие соображения: каким образом можно изменить степень свечения (вплоть до полного выключения) лампы накаливания либо иного осветительного прибора? Для этого следует на лампу подать напряжение более низкое, нежели то, на которое она рассчитана. Вариант с статическим падением напряжения на гасящем элементе (линейное регулирование) рассматривать не будем ввиду значительной мощности, на данном элементе выделяющейся. Остается только динамическое регулирование (импульсная модуляция), то есть применение ключевого элемента, и уменьшение среднего значения напряжения на лампе за счет того, что ключевой элемент часть времени закрыт. Если бы мы имели дело с постоянным напряжением, то метод регулирования этим бы и исчерпывался, возможны варианты: широтно-импульсная либо частотно-импульсная модуляция. Однако, поскольку мы имеем дело с знакопеременным напряжением, мы можем применить поцикловое пропускание/блокирование напряжения либо блокирование в пределах одного цикла (периода) входного напряжения (что является вариантом частотно-импульсной модуляции). Данный вариант имеет несомненное преимущество перед импульсной модуляцией в том, что переключение состояния регулирующего элемента можно проводить в момент перехода напряжения через ноль, то есть в случае резистивной нагрузки при нулевом токе, что значительно снижает потери на переключение. Поскольку поцикловое ограничение имеет существенный недостаток в виде мерцания, чаще применяется вариант с частичной отсечкой напряжения в пределах цикла (обычно половина периода). Отсечка может быть реализована как в начале цикла (запаздывание включения), так и в конце (опережающее выключение), Поскольку первый вариант легко реализуется на симисторе ( при этом выключение происходит автоматически при переходе через 0), примем его в качестве рабочего.
Данный вариант имеет несомненное преимущество перед импульсной модуляцией в том, что переключение состояния регулирующего элемента можно проводить в момент перехода напряжения через ноль, то есть в случае резистивной нагрузки при нулевом токе, что значительно снижает потери на переключение. Поскольку поцикловое ограничение имеет существенный недостаток в виде мерцания, чаще применяется вариант с частичной отсечкой напряжения в пределах цикла (обычно половина периода). Отсечка может быть реализована как в начале цикла (запаздывание включения), так и в конце (опережающее выключение), Поскольку первый вариант легко реализуется на симисторе ( при этом выключение происходит автоматически при переходе через 0), примем его в качестве рабочего.
Набросаем псевдокод простенькой реализации алгоритма поциклового димирования с задержкой включения:
while (1) {
Запрет_прерываний;
timer=Коррекция_дребезга; while (timer) { if ~signal() { timer++}; timer--;}; // определяем момент перехода через 0
timer=Задержка_включения; while (timer) { timer--}; // делаем задержку включения
Включение; Задержка_на включение; Выключение;
Разрешение прерываний;
timer=Задержка_ожидания; while (timer && ) { timer--}; // пауза перед началом очередного цикла
};При такой реализации критическими секциями являются вторая и третья строка ( ну и четвертая) основного цикла, поскольку соблюдение времени их исполнения определяет точность позиционирования включающего импульса относительно начала цикла, поэтому контролируем эти времена путем запрета прерываний. То есть у нас есть довольно-таки продолжительный интервалы времени, в течении которых прерывания запрещены, и мы не сможем общаться с периферийными устройствами, в том числе и с ЗИГ. Какие тут возможны проблемы? Совершенно не исключено (еще раз подчеркну что с конкретикой ЗИГ я на момент написания поста не знаком), что некоторые операции обмена по радио-интерфейсу требуют жестких ограничений на временные параметры. Кандидатом на такие операции могут быть разного рода «рукопожатия» (подтверждения операции). И действительно, беглое знакомство с описанием библиотеки показывает, что там есть требование по вызову 65 мксек. Поскольку прерывания у нас запрещены на более длительное время, обеспечить выполнение данного требования мы не можем, что и приводит к коллизии. Прежде, чем мы приступим к поиску путей решения проблемы, необходимо выяснить, действительно ли она имеется.
То есть у нас есть довольно-таки продолжительный интервалы времени, в течении которых прерывания запрещены, и мы не сможем общаться с периферийными устройствами, в том числе и с ЗИГ. Какие тут возможны проблемы? Совершенно не исключено (еще раз подчеркну что с конкретикой ЗИГ я на момент написания поста не знаком), что некоторые операции обмена по радио-интерфейсу требуют жестких ограничений на временные параметры. Кандидатом на такие операции могут быть разного рода «рукопожатия» (подтверждения операции). И действительно, беглое знакомство с описанием библиотеки показывает, что там есть требование по вызову 65 мксек. Поскольку прерывания у нас запрещены на более длительное время, обеспечить выполнение данного требования мы не можем, что и приводит к коллизии. Прежде, чем мы приступим к поиску путей решения проблемы, необходимо выяснить, действительно ли она имеется.
Предположим, что мы действительно не сможем обеспечить требуемую обработку ЗИГ. Ну и что? Стандарт разрабатывался неглупыми людьми (всегда считай собеседника не глупее себя, пока он не докажет тебе обратное, и даже в этом случае ты можешь ошибаться), которые прекрасно знают, что такое эфир в диапазоне 2,4 Ггц, и я никогда не поверю, что в этом стандарте не предусмотрены меры по повторной передаче и коррекции сбоев, в том числе по временным параметрам. Поэтому чем нам грозит пропуск сообщения об изменении параметров свечения лампы? Тем что мы его примем в следующем цикле, когда прерывания будут разрешены, либо в следующем и так далее. То есть задержка изменения свечения лампы может составить (я щедрый) до 10 циклов работы, то есть 10*1/50/2=1/10 секунды. Я не очень понимаю, каким образом такая задержка может быть отмечена пользователем.
Поэтому чем нам грозит пропуск сообщения об изменении параметров свечения лампы? Тем что мы его примем в следующем цикле, когда прерывания будут разрешены, либо в следующем и так далее. То есть задержка изменения свечения лампы может составить (я щедрый) до 10 циклов работы, то есть 10*1/50/2=1/10 секунды. Я не очень понимаю, каким образом такая задержка может быть отмечена пользователем.
Теперь предположим, что используемая нами библиотека (от фирмы ATMEL, между прочим) сделана криворукими программистами (хотя это и противоречит моим принципам, но что не сделаешь в порядке мысленного эксперимента), и она действительно падает, если ее не вызвать в течении 65 мксек после прихода сообщения. То есть мы не сможем гарантировать длительность исполнения строк 1 и 2 при приеме управляющей информации от ЗИГ. Ну и что? То есть при получении информации об необходимости изменения светимости лампы мы можем неправильно выдать очередной цикл управления (мы можем укоротить период свечения вплоть до полного выключения).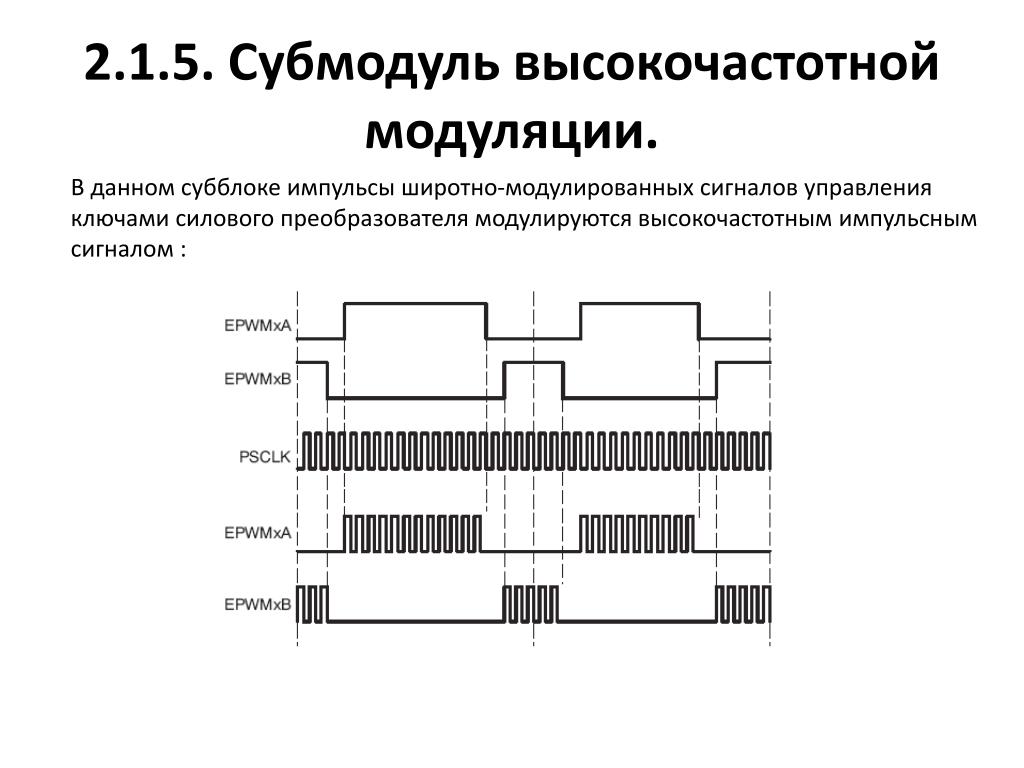 Если информация передается только, когда ее надо изменить, то опять-таки я не представляю себе пользователя, который заметит изменение светимости лампы, вызванное подобным редким сбоем.
Если информация передается только, когда ее надо изменить, то опять-таки я не представляю себе пользователя, который заметит изменение светимости лампы, вызванное подобным редким сбоем.
Теперь предположим, что все по настоящему плохо, то есть информация падает к нам достаточно часто и мы обязаны обработать ее в кратчайшие сроки после приема, то есть время выполнения нашего псевдокода становится совершенно непредсказуемым (в сторону увеличения длительности). Ситуация действительно неприятная, и нам не остается ничего другого, кроме как отказываться от применяемой простой и понятной реализации. Что же мы можем сделать, не ставя рядом дополнительный МК (<сарказм>). Ну для начала вспомнить о существовании таких вещей как прерывания, таймеры и связанные с таймером ШИМ модуляторы (всего этого в данном МК есть в избытке). Я предлагаю следующее решение: определяем длительность цикла и настраиваем один из таймеров на соответствующую длительность в режиме автозагрузки или в режиме однократном (на время несколько короче времени цикла). Настраиваем режим ШИМ и выходной сигнал используем для управления симистором. Осуществляем синхронизацию работы таймера с циклом сетевого напряжения. Заводим сигнал о переходе через 0 на прерывание и сажаем на него подпрограмму коррекции длительности таймера (для автозагрузки) либо перезапуска таймера (для однократного). Поскольку этот обработчик очевидно несложен и недолог (длительные операции по вычислению истинного времени прихода прерывания (не забываем про режим захвата), вычисления среднего и так далее могут быть отнесены в нижнюю половину обработчика), требования по запуску библиотеки мы выдерживаем. В общем, все довольны, все смеются.
Настраиваем режим ШИМ и выходной сигнал используем для управления симистором. Осуществляем синхронизацию работы таймера с циклом сетевого напряжения. Заводим сигнал о переходе через 0 на прерывание и сажаем на него подпрограмму коррекции длительности таймера (для автозагрузки) либо перезапуска таймера (для однократного). Поскольку этот обработчик очевидно несложен и недолог (длительные операции по вычислению истинного времени прихода прерывания (не забываем про режим захвата), вычисления среднего и так далее могут быть отнесены в нижнюю половину обработчика), требования по запуску библиотеки мы выдерживаем. В общем, все довольны, все смеются.
Тем не менее я бы серьезно подумал о применении в будущем библиотеки, выдвигающей столь жесткие требования к разработке совместно используемого программного обеспечения. Единственно, что приходит в голову: все-таки такие ограничения не заложены в библиотеку разработчиками, а явились следствием не вполне корректной интерпретации ее описания теми программистами, которые ее использовали. Я бы оценил соотношение вероятностей первого и второго вариантов как 2 к 8, особенно если учесть упоминание в описании МК расширенного режима функционирования аппаратуры, который «снижают требования к допустимым задержкам». Но тут мы вступаем на зыбкую почву догадок и предположений, хотя меня тема ЗИГ заинтересовала, и я подумываю о более глубоком ее изучении с написанием соответствующей библиотеки. Правда, несмотря на заявления некоторых участников дискуссии, такая библиотека (для случая простого устройства — это термин ЗИГ) в исходных кодах от фирмы ATMEL имеется в свободном доступе.
Я бы оценил соотношение вероятностей первого и второго вариантов как 2 к 8, особенно если учесть упоминание в описании МК расширенного режима функционирования аппаратуры, который «снижают требования к допустимым задержкам». Но тут мы вступаем на зыбкую почву догадок и предположений, хотя меня тема ЗИГ заинтересовала, и я подумываю о более глубоком ее изучении с написанием соответствующей библиотеки. Правда, несмотря на заявления некоторых участников дискуссии, такая библиотека (для случая простого устройства — это термин ЗИГ) в исходных кодах от фирмы ATMEL имеется в свободном доступе.
Наверное, такое решение имеет неочевидные для меня минусы, поскольку не было реализовано разработчиками фирмы, пост которой и породил дискуссию. Буду рад с ними ознакомиться, поскольку это несомненно расширит мой кругозор как разработчика встроенных устройств.
Импульсные методы модуляции
Используя серию импульсов в качестве переносчика, мы можем меняя амплитуду, длительность, положение во времени, число импульсов и т.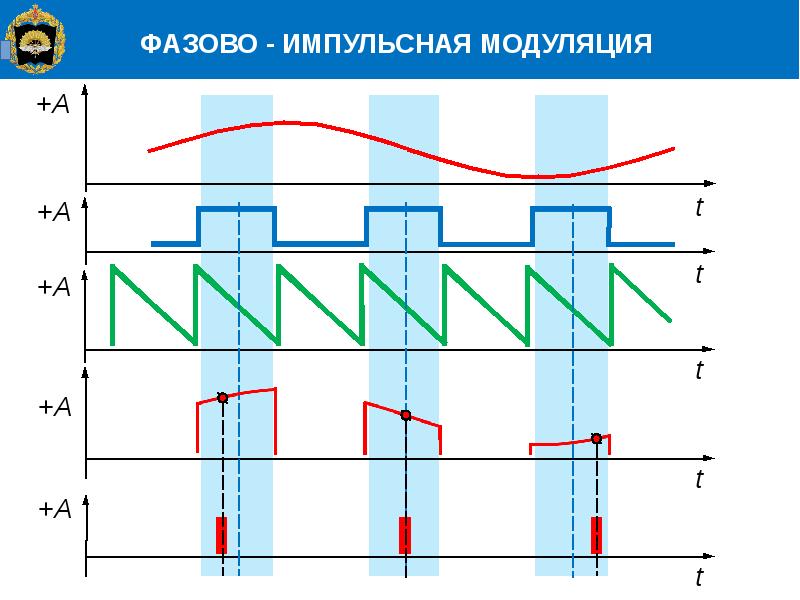 д. под воздействием сообщения, тем самым осуществлять импульсную модуляцию.
д. под воздействием сообщения, тем самым осуществлять импульсную модуляцию.
Амплитудно- импульсная модуляция (АИМ).Под воздействием мгновенных значений сообщения амплитуда импульсов переносчика изменяется.
амплитуда модулированных импульсов, U— амплитуда немодулированных импульсов, ma– коэффициент глубины модуляции при АИМ, -угловая частота сообщения.
Импульсы, модулированные по амплитуде, обладают спектром . отличным от немодулированной последовательности тем , что вокруг каждой составляющей спектра немодулированной последовательности появляется боковые частоты fk± fсообщ Однако ширина полосы и в этом случае определяется практически длительностью импульсов и слабо зависит от модулирующей частоты, т. е. . Из-за низкой помехоустойчивости и погрешностей, возникающих при изменении коэффициента передачи линии связи, АИМ применяется в ТИ только как промежуточный вид модуляции (АИМ- ЧМ ).
Широтно- импульсная модуляция (ШИМ).Изменяется ширина или длительность импульсов переносчика за счет положения заднего импульса. Частота и амплитуда при ШИМ не изменяется. Помехоустойчивость ШИМ значительно выше АИМ, и ШИМ широко распределена в ТИ. При ШИМ необходимо выбирать полосу частот по наиболее короткому импульсу ()
Спектр частот ШИМ аналогичен спектру АИМ с той лишь разницей, что при ШИМ вокруг каждой гармоники имеется на две ( как при АИ), а несколько пар боковых частот.
Используются и другие разновидности ШИМ , когда изменяется положение переднего фронта импульсов при неизменном положении заднего фронта или изменяется положение обоих фронтов.
Время – импульсная модуляция (ВИМ).Эта модуляция иногда называется фазоимпульсной модуляцией (ФИМ). Импульс сдвигается на + при увеличении мгновенного значения и влево на – при его уменьшении. При синусоидальной форме сообщения сдвиг, или девиация, импульса определяется как
, (4-24)
Полоса частот при ВИМ определяется практически длительностью импульса.
Частотно-импульсная модуляция (ЧИМ).При увеличении мгновенного значения сообщения частота импульсов увеличивается, а при уменьшении мгновенного значения – уменьшается. Ширина полосы частот определяются длительностью импульса: .
Кодоимпульсная модуляция (КИМ).При этом сообщение квантуется по уровню и времени , а затем каждый дискретный уровень передается с помощью кода в дискретные моменты времени. Если, например, квантованная ступенчатая функция , представленная на рис. передается обычным двоичным кодом, то ступенька , соответствующая уровню 3, передается комбинацией 0011 в момент времени t0 , вторая , соответствующая уровню 2, -0010 в момент времени t1 . В моменты t2, t3 и , t4 будет переданы соответствующим комбинации. Полоса частот в КИМ определяется длительностью импульса. Кодоимпульсная модуляция применяется в ТИ.
Дельта- модуляция (- модуляция). Об этой модуляции указывается при осуществлении дифференциального квантования, где было показано , что в каждый момент времени передается или отрицательный или положительный импульс, соответствующий тому или иному знаку приращения. Таким образом, при любом числе уровней квантования осуществляется лишь двух дискретных сигналов, которыми передается только знак приращения функции. Это достоинство дельта — модуляции. Ёе недостаток заключается в накоплении ошибок с течением времени. Так, если на приеме вместо положительного импульса в момент принят отрицательный , то это сместит значение функции на два уровня вниз. В дальнейшем несмотря на правильность последующий передачи, эта ошибка будет существовать до тех пор , пока она не будет скомпенсирована ошибкой противоположного знака. Кроме того, ∆- модуляция несет в себе недостатки, связанные с квантованием по времени и по уровню, о чем говорилось выше.
Об этой модуляции указывается при осуществлении дифференциального квантования, где было показано , что в каждый момент времени передается или отрицательный или положительный импульс, соответствующий тому или иному знаку приращения. Таким образом, при любом числе уровней квантования осуществляется лишь двух дискретных сигналов, которыми передается только знак приращения функции. Это достоинство дельта — модуляции. Ёе недостаток заключается в накоплении ошибок с течением времени. Так, если на приеме вместо положительного импульса в момент принят отрицательный , то это сместит значение функции на два уровня вниз. В дальнейшем несмотря на правильность последующий передачи, эта ошибка будет существовать до тех пор , пока она не будет скомпенсирована ошибкой противоположного знака. Кроме того, ∆- модуляция несет в себе недостатки, связанные с квантованием по времени и по уровню, о чем говорилось выше.
Многократные методы модуляции.Сообщение может быть передано сложным сигналом, образованным несколькими поочередными модуляциями. Обычно такой сигнал является результатом двойной модуляции : первая модуляция –импульсная , в которой модулируется серия импульсов, или импульсная поднесущая, вторая – непрерывная, в которой модулируется несущая. При тройных модуляциях первая модуляция импульсная, вторая и третья непрерывная. Иногда применяются двойная модуляция импульсной поднесущей : сначала осуществляется АИМ, которая затем преобразуется в ВИМ или ШИМ, а затем производиться непрерывная модуляция несущей. В итоге возникает: АИМ-ВИМ АМ, АИМ-ШИМ-ЧМ и т. д. промодулированная по амплитуде серия импульсов в свою очередь модулирует ВЧ – несущую. В результате возникает сигнал в виде радиоимпульсов.
Обычно такой сигнал является результатом двойной модуляции : первая модуляция –импульсная , в которой модулируется серия импульсов, или импульсная поднесущая, вторая – непрерывная, в которой модулируется несущая. При тройных модуляциях первая модуляция импульсная, вторая и третья непрерывная. Иногда применяются двойная модуляция импульсной поднесущей : сначала осуществляется АИМ, которая затем преобразуется в ВИМ или ШИМ, а затем производиться непрерывная модуляция несущей. В итоге возникает: АИМ-ВИМ АМ, АИМ-ШИМ-ЧМ и т. д. промодулированная по амплитуде серия импульсов в свою очередь модулирует ВЧ – несущую. В результате возникает сигнал в виде радиоимпульсов.
При модуляции ШИМ-АМ импульсы наполняются высокой частотой, в результате чего возникает радиоимпульсы одинаковой амплитуды и частоты, но разной длительности. Если вторичная модуляция частотная , что амплитуда сигналов одинакова, но частоты заполнения разная.
Так, при АИМ-ЧМ импульсу соответствует радиоимпульс частоты f, а импульсу с большей амплитудой соответствует радиоимпульс уже с большей частотой f . Импульс наименьшей амплитуды наполняется самой низкой частотой f . интервалы времени между импульсами заполняются одной и той же частотой 3. интервалы времени между импульсами заполняются одной и той же частотой. 0 ,которая является немодулированной несущей. Двойная модуляция ШИМ-ЧМ отличается от ШИМ-АМ лишь тем, что интервалы между импульсами заполняется частотой несущей.
Импульс наименьшей амплитуды наполняется самой низкой частотой f . интервалы времени между импульсами заполняются одной и той же частотой 3. интервалы времени между импульсами заполняются одной и той же частотой. 0 ,которая является немодулированной несущей. Двойная модуляция ШИМ-ЧМ отличается от ШИМ-АМ лишь тем, что интервалы между импульсами заполняется частотой несущей.
По указанному принципу может быть получен любой другой вариант двойных модуляций. Правило их построения очевидно: сначала сообщение модулирует импульсную поднесущую (серия видеоимпульсов), которая превращаясь в сигнал, в свою очередь модулируют ВЧ- несущую.
Для осуществления тройной модуляции сообщение сначала модулируется одним из видов импульсных модуляций. Далее полученный сигнал модулирует первую непрерывную поднесущую. Новый сигнал, в свою очередь, модулирует несущую.
Обзор методов цифровой импульсной модуляции
Ключевые выводы
Все беспроводные, оптоволоконные и сетевые цифровые системы используют модуляцию для кодирования информации в сигнал несущей.

Когда несущий сигнал проходит через некоторую физическую среду, он переносит информацию между конечными точками.
Методы цифровой импульсной модуляции представляют собой подмножество методов модуляции для отправки цифровой информации по аналоговому каналу.
Методы цифровой импульсной модуляции помогают передавать данные из облака на ваш смартфон.
Возможно, вы никогда не будете напрямую взаимодействовать с методами цифровой импульсной модуляции, но они широко распространены в современной жизни. Методы модуляции отвечают за передачу информации на большие расстояния во всех областях, от базовых радиоприложений до высокоскоростных сетей по медным, оптоволоконным и воздушным сетям. Кроме того, без методов цифровой модуляции мы все застряли бы, используя AM и FM-радио для беспроводной связи.
Методы цифровой импульсной модуляции необходимо разделить на различные типы, чтобы лучше понять, где каждый из них применяется в телекоммуникационной и сетевой среде. Как оказалось, цифровая модуляция не такая уж и цифровая, когда мы начинаем рассматривать схемы многоуровневой модуляции для каналов с высокой скоростью передачи данных. Если вам всегда было интересно, как работают схемы модуляции, продолжайте читать, чтобы узнать больше.
Что такое методы цифровой импульсной модуляции?
В предстоящем обсуждении мы должны быть осторожны, чтобы различать методы цифровой импульсной модуляции и методы чисто цифровой модуляции.Это не всегда одно и то же. В целом эти две области следует тщательно разграничить следующим образом:
Цифровая модуляция : Эти схемы используют цифровые данные для изменения некоторого качества (амплитуды, фазы или частоты) аналогового несущего сигнала.
Цифровая импульсная модуляция : Эти методы не используют для модуляции цифровые сигналы с постоянным уровнем. Вместо этого импульсная модуляция включает использование квантованных импульсов для модуляции несущего сигнала или использование последовательности импульсов в качестве несущего сигнала для цифровых данных (т.g., сигнализация PAM4 для высокоскоростной сети).

Основное различие между этими двумя наборами методов цифровой модуляции заключается в использовании действительно цифрового сигнала по сравнению с использованием импульсов при модуляции и передаче. Цифровые импульсы не имеют постоянного уровня сигнала, в отличие от настоящих цифровых сигналов. В результате методы цифровой модуляции вынуждают величины несущего сигнала принимать определенные уровни сигнала. В таблице ниже показано краткое сравнение различных методов, используемых в каждом классе методов модуляции.
Цифровая модуляция | Импульсная модуляция | |
Модулирующий сигнал | Цифровые данные (любое количество битов) | Импульсы обеспечивают модуляцию |
Модулированный сигнал | Непрерывно изменяющийся аналоговый сигнал | Непрерывный аналоговый сигнал |
Методы | PSK, FSK, ASK, OOK, QAM, CPM, OFDM, решетчатая модуляция | ПКМ, дельта, дельта-сигма, ДПМ |
Приложения | Беспроводная связь, оптоволокно, высокоскоростная сеть, датчики | Телефон, аудиосистема, силовая электроника |
Цифровой vs.
 Аналоговая модуляция
Аналоговая модуляция
Существует важное различие между цифровыми методами и аналоговой модуляцией. При полностью аналоговой модуляции как несущий сигнал, так и сигнал, несущий информацию, являются непрерывными аналоговыми сигналами. Другими словами, аналоговый модулятор/демодулятор представляет собой полностью аналоговую схему. Напротив, цифровая импульсная модуляция и цифровые сигналы с постоянным уровнем дают два разных способа квантования аналоговых сигналов во временной области.
Амплитудно-импульсная модуляция
Амплитудно-импульсная модуляция (ПАМ) обычно описывается как чисто аналоговая схема модуляции, но это не совсем так.В некотором смысле PAM представляет собой сплав цифровых, аналоговых и импульсных схем модуляции. В PAM к аналоговому сигналу применяется цифровая модуляция с использованием амплитудной манипуляции (ASK). Этот амплитудно-модулированный аналоговый сигнал затем используется для модуляции последовательности импульсов, и последовательность импульсов отправляется по каналу.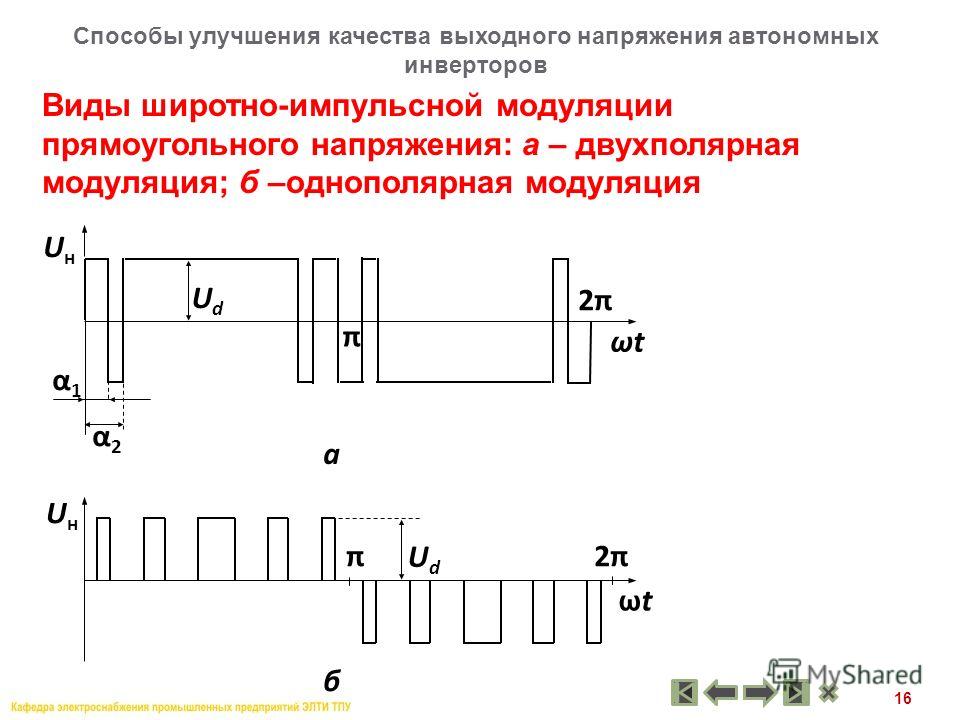 На стороне приемника сигнал и данные восстанавливаются путем дискретизации сигнала с частотой импульсов. Восстановленный амплитудно-модулированный аналоговый сигнал затем демодулируется для восстановления цифровых данных.
На стороне приемника сигнал и данные восстанавливаются путем дискретизации сигнала с частотой импульсов. Восстановленный амплитудно-модулированный аналоговый сигнал затем демодулируется для восстановления цифровых данных.
Как работает цифровая модуляция и цифровая импульсная модуляция?
Примеры цифровой модуляции
Некоторые примеры цифровой модуляции показаны на рисунке ниже.На этом изображении показаны примеры методов сдвиговой манипуляции, в частности фазовой манипуляции (PSK), амплитудной манипуляции (ASK), частотной манипуляции (FSK) и комбинации фазовой и амплитудной манипуляции. Подобными примерами являются двухпозиционная манипуляция (OOK, когда аналоговая несущая включается и выключается) и невозврат к нулю (NRZ, просто OOK со смещением постоянного тока).
Некоторые распространенные методы цифровой модуляции.
Методы Shift просты в использовании и повсеместно используются в низкочастотных приложениях, связанных с передачей сигналов. В более продвинутых методах для беспроводных приложений с высокой скоростью передачи данных и низкоскоростного оптоволокна используется квадратурная амплитудная модуляция (QAM) с многоуровневой сигнализацией, где два сигнала в квадратуре (т. е. с фазовым углом 90 градусов) используются для кодирования нескольких битов. данных. При использовании в радио скорость передачи данных ограничена до 150 Мбит/с. Однако более новые технологии оптической 64-уровневой QAM с двойной поляризацией (DP-QAM-64) обещают скорость передачи данных до 600 Гбит/с по одному волокну.
В более продвинутых методах для беспроводных приложений с высокой скоростью передачи данных и низкоскоростного оптоволокна используется квадратурная амплитудная модуляция (QAM) с многоуровневой сигнализацией, где два сигнала в квадратуре (т. е. с фазовым углом 90 градусов) используются для кодирования нескольких битов. данных. При использовании в радио скорость передачи данных ограничена до 150 Мбит/с. Однако более новые технологии оптической 64-уровневой QAM с двойной поляризацией (DP-QAM-64) обещают скорость передачи данных до 600 Гбит/с по одному волокну.
Примеры цифровой импульсной модуляции
Схемы цифровой импульсной модуляции фактически аналогичны аналого-цифровому преобразованию (АЦП).Фактически, те же самые цифровые методы, которые используются для модуляции аналогового сигнала, используются при дискретизации АЦП. Наиболее заметной среди них является импульсно-кодовая модуляция (ИКМ), где аналоговый сигнал представлен набором квантованных цифровых импульсов во временной области. Аналоговый сигнал дискретизируется в модуляторе, и уровень сигнала на каждом интервале дискретизации определяет интервал импульса, как показано ниже.
Аналоговый сигнал дискретизируется в модуляторе, и уровень сигнала на каждом интервале дискретизации определяет интервал импульса, как показано ниже.
PCM кодирует уровни аналоговых сигналов в виде импульсов, аналогично PAM.
Затем эти импульсы распространяются по каналу и могут быть восстановлены в приемнике с помощью схемы удержания 0-го порядка.Разница между PCM и PAM заключается в том, что уровни импульсов в PCM квантуются, тогда как в PAM импульсы могут иметь любое значение (т. е. в PAM нет выборки). Это квантование в PCM и подобных методах дискретизации делает эти методы цифровыми методами импульсной модуляции.
Более продвинутые схемы модуляции используют несколько несущих (аналогично OFDM и QAM) и схемы смешанных сигналов (например, PAM) для передачи более высоких скоростей передачи данных в более узких полосах частот и временных окнах. Ярким примером является 5G, где OFDM, QPSK и другие методы с несколькими несущими используются как часть агрегации несущих для обеспечения сверхвысоких скоростей передачи данных для мобильных телефонов. Еще предстоит увидеть, как будут развиваться стандарты Ethernet, оптоволокна и IEEE 802.3 по мере того, как все больше абонентов будут предъявлять более высокие требования к центрам обработки данных.
Еще предстоит увидеть, как будут развиваться стандарты Ethernet, оптоволокна и IEEE 802.3 по мере того, как все больше абонентов будут предъявлять более высокие требования к центрам обработки данных.
Это, вероятно, будет включать методы PAM с более высоким разрешением или какой-либо новый метод для дальней связи с высокой скоростью передачи данных. Вопрос о том, будут ли схемы модуляции в будущих протоколах с более высокой скоростью передачи данных включать цифровую импульсную модуляцию, остается открытым, но он остается активной областью исследований.
Если вы хотите быть в курсе наших материалов по системному анализу, подпишитесь на нашу рассылку, в которой собраны ресурсы о текущих тенденциях и инновациях.Если вы хотите узнать больше о том, как у Cadence есть решение для вас, поговорите с нами и нашей командой экспертов.
Схемы импульсной модуляции
Схемы импульсной модуляции
Далее: Схемы манипуляции
Up: Схемы цифровой модуляции
Предыдущий: Схемы цифровой модуляции
Здесь основная идея состоит в том, чтобы использовать в качестве несущего сигнала последовательность импульсов.
Выбор этой последовательности импульсов может быть весьма интересным с точки зрения
с точки зрения потребления энергии и спектрального состава.Можно
используйте прямоугольные импульсы, косинусоидальные импульсы или функцию синхронизации (Найквист)
импульсы.
Для простоты поговорим о последовательности прямоугольных импульсов.
Характеристики последовательности импульсов, которые можно изменять, следующие:
его амплитуда или ширина или положение передней кромки .
Мы поговорим о первом
две идеи;
схемы модуляции, которые делают это
называются Амплитудно-импульсная модуляция (PAM) и Широтно-импульсная модуляция (PWM)
соответственно. На рисунке 7 показано то, что известно как
полоса пропускания PAM, в которой PAM
последовательность импульсов на самом деле также умножается на несущую частоту
синусоида, чтобы обеспечить передачу на более высокой частоте.
Рис. 7. Модуляция PAM в полосе пропускания
Обратите внимание, что эту базовую схему можно сделать более сложной, используя
несколько уровней амплитуды: например, можно сгруппировать биты в
группы по 2, т. е. 00, 01, 10 и 11 и имеют четыре разные амплитуды
е. 00, 01, 10 и 11 и имеют четыре разные амплитуды
уровня для каждой из этих групп. Это называется квадратурой .
Амплитудно-импульсная модуляция (сокращенно QPAM или QAM). КАМ на самом деле
используется для алфавитов размера, отличного от 4. Таким образом, например.Полнодуплексные модемы со скоростью 2400 бод используют 16-QAM (соответствует группировке
4 бита вместе). Использование модемов 9600 бод, 14 400 бод, 28 800 бод
32-QAM, 128-QAM и 1024-QAM соответственно (вместе с чем-то известным
как решетчатое кодирование). ШИМ показан на рисунке 8.
Схема, необходимая для его создания, сложна, но она
чрезвычайно важно с концептуальной точки зрения, поскольку есть веские основания полагать, что
что 90 171 нейрон 90 172 передают информацию, используя последовательности спайков PWM.
Рис. 8: ШИМ-модуляция
Далее: Схемы ключей
Up: Схемы цифровой модуляции
Предыдущий: Схемы цифровой модуляции
S Sastry
вс 20 апр 16:50:27 PDT 1997
методов модуляции | Основы электроники
Модуляция — это процесс преобразования данных в электрические сигналы, оптимизированные для передачи. Методы модуляции можно условно разделить на четыре типа: аналоговая модуляция, цифровая модуляция, импульсная модуляция и метод расширенного спектра.
Методы модуляции можно условно разделить на четыре типа: аналоговая модуляция, цифровая модуляция, импульсная модуляция и метод расширенного спектра.
Аналоговая модуляция обычно используется для AM, FM-радио и коротковолнового вещания.
Цифровая модуляция включает передачу двоичных сигналов (0 и 1).
Цифровая модуляция включает передачу двоичных сигналов (0 и 1).
Этот метод подразделяется на модуляцию одной несущей, при которой несущая занимает всю полосу пропускания (т.е. амплитуда, частота и фаза) и схема с несколькими несущими, которая модулирует и передает разные данные на нескольких несущих.
Кроме того, существует метод импульсной модуляции, используемый для изменения ширины импульса, и метод расширения спектра, который распределяет энергию сигнала по широкой полосе частот.
Определения методов модуляции
В беспроводной связи информация передается путем кодирования голоса и данных в радиоволнах определенных частот.
В этом разделе описываются методы модуляции, принятые в линейке беспроводных устройств малого радиуса действия ROHM.
ASK (амплитудная манипуляция)
Метод цифровой модуляции, при котором передача данных осуществляется путем изменения наличия/отсутствия аналоговых сигналов.
FSK (частотная манипуляция)
Этот метод использует разницу в амплитуде аналоговых сигналов для модуляции цифровых сигналов путем переключения между низкой и высокой частотой для представления 0 и 1.
[ASK и FSK]
O-QPSK (четвертичная фазовая манипуляция со смещением)
Схема цифровой модуляции, которая выполняет передачу данных путем фазовой модуляции опорного сигнала.Синхронизация синфазной составляющей (I) и квадратурной составляющей (Q) сдвинута на 1/2 по сравнению с QPSK, которая выполняет фазовую модуляцию в 4 шага.
*Пространственная диаграмма сигнала представляет собой представление сигнала данных на двумерной плоскости.
[Пространственная диаграмма сигнала O-QPSK*]
OFDM (мультиплексирование с ортогональным частотным разделением)
Метод цифровой модуляции с несколькими несущими, при котором большие объемы данных передаются по нескольким близко расположенным потокам данных.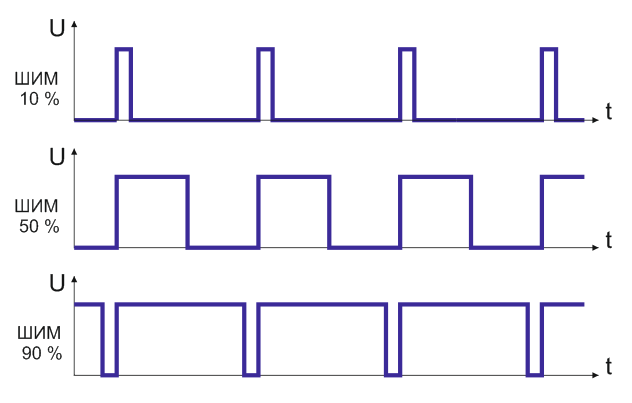
DSSS (расширение спектра прямой последовательностью)
Тип метода расширения спектра, использующий метод прямого расширения.Сигналы данных распространяются по широкой полосе частот при малой мощности.
%PDF-1.7
%
1 0 объект
>/PageLabels>/Lang(en-IN)/Metadata 743 0 R >>
эндообъект
5 0 объект
>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 46 0 R /Tabs/S/Group>> >
эндообъект
6 0 объект
>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 53 0 R /Tabs/S/Group>> >
эндообъект
7 0 объект
>/ExtGState>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 63 0 R /Tabs/S/ Группа>>>
эндообъект
8 0 объект
>/ExtGState>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 66 0 R /Tabs/S/ Группа>>>
эндообъект
9 0 объект
>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 75 0 R /Tabs/S/Group>> >
эндообъект
10 0 объект
>/ExtGState>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 77 0 R /Tabs/S/ Группа>>>
эндообъект
11 0 объект
>/ExtGState>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 84 0 R /Tabs/S/ Группа>>>
эндообъект
12 0 объект
>/ExtGState>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]/Font>>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 86 0 R /Tabs/S/ Группа>>>
эндообъект
13 0 объект
>/ExtGState>/ProcSet[/PDF/Text/ImageB/ImageC/ImageI]>>/MediaBox[ 0 0 960 540]/Type/Page/Parent 14 0 R /Contents 88 0 R /Tabs/S/Group>> >
эндообъект
26 0 объект
>поток
x|\7
L -tH$imcQ$1 ǁJp
@Ŗ3wI|?sspokegΜ93a>${E OM!5@
H$~!lxҚ2t@ι$ >ĻWٴZDhkzˋKZ!떯_к?EC63/Ot =wu G@GG
>Eѵ=-_u›^05 R6[qӘAՍ ܛlƱ~~SP yodz\/OR D
дх#;;л
я+
🤗+⡞ѥ
F$FR$ͅ&(_@{8@^q$ EcOChjzQ$۹ Ku}Y$[Bt6}t8-}O7I jNOK}M[9m^?kJ؏. n=_OiZ{ue25ϓ͇SD;IrhFuӉ\s㬯wΘw7+{l52thu
n=_OiZ{ue25ϓ͇SD;IrhFuӉ\s㬯wΘw7+{l52thu
Широтно-импульсная модуляция — Learn.sparkfun.com
Что такое широтно-импульсная модуляция?
Широтно-импульсная модуляция (ШИМ) — это причудливый термин для описания типа цифрового сигнала. Широтно-импульсная модуляция используется в различных приложениях, включая сложные схемы управления. Обычный способ, которым мы используем их здесь, в SparkFun, — это управление затемнением светодиодов RGB или управление направлением сервопривода. Мы можем добиться ряда результатов в обоих приложениях, потому что широтно-импульсная модуляция позволяет нам изменять время, в течение которого сигнал находится на высоком уровне, аналоговым способом.Хотя сигнал может быть только высоким (обычно 5 В) или низким (земля) в любое время, мы можем изменить пропорцию времени, в течение которого сигнал находится на высоком уровне, по сравнению с тем, когда он низкий в течение постоянного интервала времени.
Роботизированный захват, управляемый серводвигателем с широтно-импульсной модуляцией
Предлагаемая литература
Некоторые справочные руководства, которые вы могли бы рассмотреть в первую очередь:
Рабочий цикл
Когда сигнал высокий, мы называем это «вовремя». Чтобы описать количество «вовремя», мы используем понятие рабочего цикла. Рабочий цикл измеряется в процентах. Процент рабочего цикла конкретно описывает процент времени, в течение которого цифровой сигнал включен в течение интервала или периода времени. Этот период является обратным частоте сигнала.
Чтобы описать количество «вовремя», мы используем понятие рабочего цикла. Рабочий цикл измеряется в процентах. Процент рабочего цикла конкретно описывает процент времени, в течение которого цифровой сигнал включен в течение интервала или периода времени. Этот период является обратным частоте сигнала.
Если цифровой сигнал проводит половину времени во включенном состоянии, а другую половину в выключенном, мы бы сказали, что цифровой сигнал имеет коэффициент заполнения 50% и напоминает идеальную прямоугольную волну. Если процент выше 50%, цифровой сигнал проводит больше времени в высоком состоянии, чем в низком, и наоборот, если рабочий цикл меньше 50%.Вот график, иллюстрирующий эти три сценария:
Примеры рабочего цикла 50%, 75% и 25%
Рабочий цикл 100 % будет таким же, как установка напряжения на 5 Вольт (высокое). Рабочий цикл 0% будет таким же, как заземление сигнала.
Примеры
Вы можете управлять яркостью светодиода, регулируя рабочий цикл.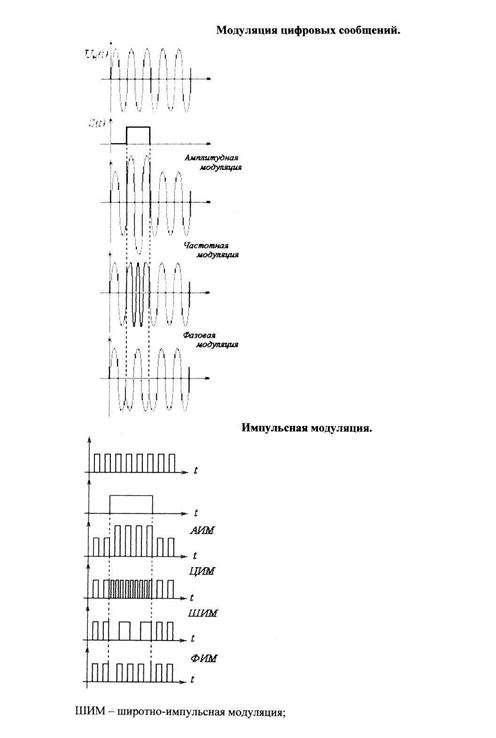
ШИМ для управления яркостью светодиодов
С помощью светодиода RGB (красный, зеленый, синий) вы можете контролировать, сколько каждого из трех цветов вы хотите добавить в цветовую смесь, уменьшая их яркость в различной степени.
Основы смешивания цветов
Если все три включены в равных количествах, результатом будет белый свет различной яркости. Синий, смешанный с зеленым, даст бирюзовый. В качестве более сложного примера попробуйте полностью включить красный цвет, рабочий цикл зеленого 50% и полностью выключить синий, чтобы получить оранжевый цвет.
ШИМ можно использовать для смешивания цветов RGB
Частота прямоугольной волны должна быть достаточно высокой при управлении светодиодами, чтобы получить надлежащий эффект затемнения.Волна с рабочим циклом 20% при частоте 1 Гц будет очевидна для ваших глаз, в то время как рабочий цикл 20% при частоте 100 Гц или выше будет выглядеть тусклее, чем при полном включении. По сути, период не может быть слишком большим, если вы стремитесь к эффекту затемнения светодиодов.
По сути, период не может быть слишком большим, если вы стремитесь к эффекту затемнения светодиодов.
Вы также можете использовать широтно-импульсную модуляцию для управления углом серводвигателя, прикрепленного к чему-то механическому, например, к руке робота. Сервоприводы имеют вал, который поворачивается в определенное положение в зависимости от линии управления. Наши серводвигатели имеют диапазон около 180 градусов.
Частота/период относятся к управлению конкретным сервоприводом. Типичный серводвигатель должен обновляться каждые 20 мс с импульсом от 1 мс до 2 мс, или, другими словами, с рабочим циклом от 5 до 10% на волне 50 Гц. С импульсом 1,5 мс серводвигатель будет находиться в естественном положении 90 градусов. При импульсе в 1 мс сервопривод будет в положении 0 градусов, а при импульсе в 2 мс сервопривод будет в положении 180 градусов. Вы можете получить полный диапазон движения, обновив сервопривод на промежуточное значение.
ШИМ, используемый для удержания серводвигателя под углом 90 градусов относительно его кронштейна
Ресурсы и продолжение
Широтно-импульсная модуляция используется в различных приложениях, особенно для управления. Вы уже знаете, что его можно использовать для затемнения светодиодов и управления углом серводвигателей, и теперь вы можете приступить к изучению других возможных применений. Если вы чувствуете себя потерянным, не стесняйтесь проверить комплект SparkFun Inventor’s Kit, в котором есть примеры с использованием широтно-импульсной модуляции.Если вы готовы немедленно приступить к кодированию и у вас есть Arduino, посмотрите пример кодирования ШИМ здесь.
Вы уже знаете, что его можно использовать для затемнения светодиодов и управления углом серводвигателей, и теперь вы можете приступить к изучению других возможных применений. Если вы чувствуете себя потерянным, не стесняйтесь проверить комплект SparkFun Inventor’s Kit, в котором есть примеры с использованием широтно-импульсной модуляции.Если вы готовы немедленно приступить к кодированию и у вас есть Arduino, посмотрите пример кодирования ШИМ здесь.
Не стесняйтесь продолжать исследовать:
Импульсная модуляция, октябрь 1960 г. Popular Electronics
Октябрь 1960 г. Popular Electronics Таблица Восковая ностальгия и изучение истории ранней электроники.См. статьи |
Импульсная модуляция приходит
во многих формах, включая позиционно-импульсную модуляцию (PPM), широтно-импульсную модуляцию
(ШИМ), частотно-импульсная модуляция (ЧИМ), амплитудно-импульсная модуляция (ПАМ) и импульсная
кодовая модуляция (ИКМ). В дополнение к хорошему введению в концепцию
В дополнение к хорошему введению в концепцию
импульсной модуляции, автор Герберт Кондо раскрывает основы каждого типа, а затем
обсуждается их применение в различных системах связи.Первый раз
Помнится, с импульсной модуляцией я столкнулся в середине 1970-х с системами радиоуправления.
для моделей самолетов. Импульсная позиционная модуляция была схемой, используемой как в АМ, так и в
ФМ наборы. Современные радиоуправляемые системы используют расширенный спектр со скачкообразной перестройкой частоты (FHSS), прямой
последовательный расширенный спектр (DSSS) или их комбинация.
Импульсная модуляция
Этот захватывающий способ общения выходит за пределы космоса.
Герберт Кондо
Со спутника 1959-дельта пришло сообщение
громко и ясно: огромный пояс электронов окружает планету Земля на тысячи миль
в космосе.У нашей дельты 1959 года были и другие потрясающие новости: внешнее излучение Ван Аллена
пояс, который когда-то считался расширяющимся после солнечного извержения, на самом деле сжимается. Даже больше
Даже больше
поразительным было известие о том, что существует огромный межпланетный «крушитель атомов» с центром
о солнце.
Спутник 1959-дельта, широко известный как «Исследователь VI», мог сказать гораздо больше.
Но то, как он это сказал, так же интересно, как и то, что он сказал. Много Исследователя
Информация VI передавалась пятиваттным передатчиком с импульсной модуляцией.
самая сложная система модуляции, известная сегодня.Так важны эти новые коммуникации
системы, что она уже используется для телеграфии, радиолокации, многоканальной микроволновой передачи,
и телеметрии, а также космической связи.
Базовая теория. Идея импульсной модуляции
много времени. В телеграфии знакомые «точки и тире» азбуки Морзе — это импульсы.
производится с помощью выключателя или ключа. Операторы радиолюбителей уже давно используют форму импульса
модуляции, когда они переключают свои высокочастотные передатчики для отправки импульсов
электромагнитная энергия в коде. Телевизионщики наткнулись на форму пульса
Телевизионщики наткнулись на форму пульса
модуляция в лучевой трубке.
Принцип системы импульсной модуляции на самом деле до смешного прост:
информация впечатывается в последовательность импульсов, а не непосредственно в непрерывную волну.
перевозчик. Но если это так просто, то почему все волнения по этому поводу? Что значит
Импульсная модуляция есть, а более привычные формы модуляции — АМ и ЧМ — нет
имеют?
Во-первых, импульсная модуляция обеспечивает практически бесшумную передачу и
прием — даже больше, чем FM.Чтобы визуализировать эту концепцию, давайте рассмотрим поезд
идеальных импульсов — импульсы с вертикальными сторонами, как показано на (А) рис. 1. Шум — это
улавливается во время передачи, что приводит к форме волны, показанной на (B). С подходящим
схемы ограничения и ограничения, мы можем воспроизвести только ту часть импульсного сигнала
между пунктирными линиями, как показано на (C). Сделав это, мы можем повторно передать
этот новый сигнал свободен от шума.
Рис. 1. Исходная амплитуда импульсов сигнала (A) зависит от шума при передаче
(Б).Электронное погружение восстанавливает исходный сигнал (C).
Рис. 2. Информация, содержащаяся в модулирующем сигнале в (A), показана в виде
появится при использовании различных методов передачи импульсов (от B до F). Бинарный
числа, соответствующие амплитудам сигнала, могут быть переданы в системе ИКМ.
Импульсная модуляция
имеет еще одно выдающееся преимущество. Он использует энергию передатчика
более эффективно, чем AM или FM, из-за простого «включенного» характера
импульсы.Это означает, что импульсный передатчик будет иметь больший радиус действия, чем AM.
передатчик той же мощности.
Все системы импульсной модуляции сводятся к двум основным принципам:
(1) Сигнал сообщения модулирует последовательность импульсов, которые применяются к поднесущей.
(2) Затем поднесущая модулирует высокочастотную несущую.
Отношение поднесущей к несущей можно прояснить по аналогии. Давайте
Давайте
предположим, что в одном поезде нью-йоркского метро едет пять курьеров.
Город.Каждый мальчик несет сообщение разным адресатам (получателям). Если мы
подумайте о метро как о перевозчике, тогда каждый мальчик-посыльный является подвозчиком. То
сообщение, которое несет каждый мальчик, представляет собой модулированный сигнал.
Отбор проб. Наиболее важной идеей импульсной модуляции является выборка,
концепция, с которой мы сталкиваемся почти каждый день. Например, если вы никогда не слышали
стереофонической записи, вы можете прослушать запись «стерео сэмпла» и получить хорошее
представление о том, что такое стерео.Еще одним широко известным применением выборки является анализ общественного мнения.
опрос, результаты которого основываются на методах выборочной выборки.
Если мы хотим передать разговор с помощью импульсной модуляции, мы берем образцы
разговор — тысячи отсчетов каждую секунду — а затем передать их в
в том же порядке, в котором они были произнесены. Каждый импульс фактически представляет собой один образец;
Каждый импульс фактически представляет собой один образец;
его высота, ширина или положение указывают мгновенное значение отправленного звука.
Для хорошего воспроизведения было показано, что количество выборок в секунду
должна быть более чем в два раза выше максимальной частоты сигнала, который мы хотим послать.Таким образом, если самая высокая частота телефонного разговора составляет 4000 гц, мы должны
брать не менее 8000 образцов каждую секунду.
Типы модуляции. Еще одна базовая концепция импульсной модуляции
сама модуляция. Когда мы модулируем несущую волну, мы обычно изменяем ее
амплитуда (AM), его частота (FM) или его фаза (PM). Хорошая вещь о пульсе
заключается в том, что есть еще одна характеристика, которую мы можем использовать для модуляции, а именно время.
Если мы изменим синхронизацию импульсов, мы фактически изменим их положение.
относительно друг друга — на самом деле это делается при импульсно-позиционной модуляции (PPM). При широтно-импульсной модуляции (ШИМ) мы изменяем ширину импульсов; по частоте импульсов
При широтно-импульсной модуляции (ШИМ) мы изменяем ширину импульсов; по частоте импульсов
модуляция (PFM), частота импульса изменяется. Мы также можем изменить амплитуду
импульсов для создания амплитудно-импульсной модуляции (ПАМ). И мы можем даже кодировать
импульсы, как это делается в импульсно-кодовой модуляции (ИКМ).
Давайте подробнее рассмотрим все эти методы импульсной модуляции и найдем
как синусоидальная волна — см. рис. 2 (A) — передается в каждой системе.Позже мы
посмотреть, как широтно-импульсная модуляция и импульсно-кодовая модуляция используются в передачах
со спутников и в многоканальной телефонной связи.
ППМ. Импульсная модуляция положения, широко используемая в радиолокации и в
микроволновых реле, зависит от модулирующего сигнала, изменяющего положение импульсов.
Отдельный генератор генерирует серию маркерных импульсов, которые служат опорными точками.
При использовании PPM важно относительное положение импульса сигнала и импульса маркера,
как показано на рис. 2(Б).
2(Б).
ШИМ. При широтно-импульсной модуляции ширина или продолжительность
импульсов изменяется прямо в соответствии с модулирующим сигналом, как показано на рис.
2(С). Также известная как широтно-импульсная модуляция (PDM), ШИМ изменяется либо в
или задние фронты, или, возможно, даже оба фронта импульсов. Например, если
передние фронты импульсов разнесены через равные промежутки времени, задние
тогда ребра можно было варьировать (смещать во времени) в соответствии с амплитудой
модулирующего сигнала.Поскольку широтно-импульсная модуляция требует относительно простого
схемы, это идеальный тип импульсной модуляции для использования в космических аппаратах.
ПФМ. Частотно-импульсная модуляция чем-то похожа на обычную
FM, за исключением того, что основная несущая состоит из равноотстоящих импульсов, а не
синусоида. Возникновение импульсов зависит от амплитуды модулирующего
сигнал, как на рис. 2(D).
ПАМ. При амплитудно-импульсной модуляции высота импульсов
При амплитудно-импульсной модуляции высота импульсов
изменяется непосредственно в соответствии с модулирующим сигналом, подобно амплитуде
модуляция непрерывной волны (c.ж.) перевозчик. На рис. 2(E) положительная динамика
часть синусоиды увеличивает высоту последовательности импульсов, в то время как отрицательная
часть сигнала уменьшает высоту.
Рис. 3. Спутники могут отправлять несколько сообщений по одному
передатчик путем выборки каждого сигнала с помощью вращающегося коммутатора, а затем преобразования
дискретизированная информация преобразуется в сигналы ШИМ для передачи на землю.
ПКМ. Импульсно-кодовая модуляция использует наличие или отсутствие
импульс для передачи информации.В примере, показанном на рис. 2 (F), в коде используется
группы из четырех позиций, которые могут быть «заполнены» либо импульсом, либо пробелом
(отсутствие пульса).
ШИМ в космосе. Если бы мы построили блок-схему
система телеметрии, используемая в ракете «Авангард», распадалась на пять
простые блоки, показанные на рис.![]() 3. (См. «Телеметрия — важная связь со звездами» в
3. (См. «Телеметрия — важная связь со звездами» в
в выпуске журнала Popular Electronics за ноябрь 1959 г., посвященном подробному обсуждению телеметрии.)
На рис. 3 вращающийся переключатель выборки, называемый коммутатором, выполняет выборку числа.
контактов, которые подключены к приборам, измеряющим космические данные (космические
ультрафиолетовые лучи, рентгеновские лучи и др.). Затем информация из контактов отправляется
к ключу, который запускает однократный мультивибратор (сам по себе особый тип ШИМ).
генератор). При таком расположении мультивибратор выдает импульсные сигналы,
ширина изменяется в соответствии с информацией (напряжением), подаваемой на него
коммутатор и ключ.Сигналы ШИМ подаются на генератор, который модулирует
передатчик, который отправляет информацию о характеристиках спутника наземному приемному устройству
станции.
В системе ИКМ амплитуда фактического сигнала (A) измеряется через равные промежутки времени.
Отсчеты округляются до целых значений амплитуд импульсов — квантованный сигнал
(B) — и затем преобразованы в двоичные числа. Диаграмма двоичного кода (C) дает десятичный
Диаграмма двоичного кода (C) дает десятичный
значение двоичных чисел.
«Исследователь I», открывший радиационный пояс Ван Аллена, также использовал ширину импульса
модуляция.Первоначальный вывод канала космических лучей, который нес Ван
Информация об излучении Аллена представляла собой сигнал ширины импульса, который затем модулировался по частоте.
генератор поднесущей. Поднесущая, в свою очередь, модулирует по фазе несущую
передатчик спутника. Эта довольно сложная последовательность методов модуляции
также имело место при передаче космической пыли от Explorer 1.
PCM в области связи. Из всех форм импульсной модуляции
наиболее захватывающей является импульсно-кодовая модуляция.Говорит бывший сотрудник Bell Telephone Laboratories.
ученый: «Это самая изощренная техника коммуникации.
Преимущество чрезвычайно высокого отношения сигнал/шум, а также дополнительный элемент
секретность. PCM носит статистический характер, и любую статистическую коммуникацию трудно заглушить.
система — чем менее предсказуема система, тем сложнее спроектировать электронную
контрмеры против него.»
Предположим, вы купили комплект VTVM за 29,17 долларов США, включая налоги.Если друг спросил вас
сколько вы заплатили за него, вы можете сказать ему, что это стоит 30 долларов. Вы бы солгали?
Вовсе нет — вы совершенно справедливо округляете цифры до ближайшего
легко запоминающаяся фигура. Люди делают такие вещи все время. То
тот же метод используется в импульсно-кодовой модуляции.
Например, если амплитуда сигнала, который мы хотим послать, составляет 4,7 В, ИКМ
пошлет его как 5 вольт; если амплитуда сигнала равна 2.37 вольт, PCM будет
передать его как 2 вольта. Это упрощение необходимо, потому что сигнал
для кодирования, и в коде используются только целые числа.
Предположим, мы хотим отправить сигнал, показанный на рис. 4 (A). Импульсы выборки
определить амплитуду передаваемого сигнала. Импульс А, который имеет значение
3,2 вольта изменяется на амплитуду 3 вольта, как показано на рис. 4(B). Пульс
4(B). Пульс
B, который имеет значение 3,8 вольта, изменяется на амплитуду 4 вольта.Этот процесс
упрощение исходного сигнала с точки зрения целых чисел называется квантованием
сигнал; результат известен как квантованный сигнал — см. рис. 4 (B).
После квантования сигнала его необходимо закодировать для передачи (отсюда и название,
импульсно-кодовая модуляция). Для этого используется двоичный код (см. «Язык
Цифровые компьютеры», Popular Electronics , январь 1958 г., стр. 68).
Каждый квантованный импульс, представляющий амплитуду сигнала в данной точке
должны быть преобразованы в группу импульсов в двоичном коде PCM.Всегда имейте в виду
это различие между квантованным импульсом и группой импульсов: квантованный
pulse – импульс выборки, значение которого будет определяться его амплитудой; в
группа импульсов представляет исходный сигнал на двоичном языке.
В группе двоичных импульсов имеет значение только наличие или отсутствие импульса.
Если код представляет собой группу из трех импульсов, как показано на рис. 4(C), то крайняя правая позиция
4(C), то крайняя правая позиция
имеет значение 1, если импульс присутствует, или 0, если импульс отсутствует.Середина
позиция будет иметь двойное значение первой позиции или 2, если присутствует импульс,
но снова имел бы значение 0, если бы не было импульса. Крайняя левая позиция
имел бы двойное значение среднего положения или 4, если бы присутствовал импульс,
но значение 0, если импульса не было.
Предположим, что наш квантованный импульс имеет значение 3. Тогда в трехимпульсном двоичном коде
импульс будет только в крайнем правом (1) и среднем (2) положениях (1 + 2
= 3).Если квантованный импульс имеет значение 7, то все три импульса в группе
потребуется (1 + 2 + 4 = 7).
С помощью бинарной группы из трех импульсов мы можем отправить сигнал, показанный на рис.
4(B) с использованием любого из семи значений. Для большей «точности» воспроизведения формы волны,
нам потребуется большое количество выборок, и большие группы бинарных импульсов будут
обязательный. Группа из пяти импульсов, например, дает 32 различных амплитуды; семиимпульсный
Группа из пяти импульсов, например, дает 32 различных амплитуды; семиимпульсный
группа дает 128 различных амплитуд.
Двоично-кодированный сигнал в конечном счете подается на ВЧ. передатчик, который поворачивается
попеременно включаются и выключаются бинарными импульсами.
Мультиплексирование и ИКМ. У Bell Telephone Laboratories много планов по импульсному коду.
модуляция. Например, они предполагают 24-канальную телефонную систему с ИКМ, которая
позволит 24 человекам одновременно разговаривать по одной линии.
Если у вас был хоть какой-то опыт с современными «партийными линиями», вы знаете, что это невозможно
для двух человек, чтобы поговорить по
той же линии в то же время.Как же тогда 24 человека могут это сделать? Ответ — мультиплексирование,
своего рода метод выборки. Тип, используемый в телефонии, представляет собой мультиплексирование с временным разделением.
Давайте рассмотрим случай, когда шесть человек пользуются одной телефонной линией. Три
Три
из них разговаривают в городе А и трое слушают в городе Б. С помощью вращающегося
коммутатора в городе А, каждый динамик быстро последовательно подключается к линии.
В то же время второй коммутатор в городе B, синхронизированный с коммутатором
в городе A, сэмплирует линию и распределяет голос каждого говорящего по намеченному
слушатель в городе Б.Можно вести до 176 одновременных разговоров.
по одной линии с использованием PCM.
Между прочим, мультиплексирование — это метод, используемый спутниками Земли для передачи
различные типы информации обратно на землю. Вместо подключения 24 говорящих
последовательно мы можем подключить 24 датчика, которые дают информацию о температуре,
плотность космических лучей, напряженность магнитного поля и т. д. Каждый преобразователь модулирует поднесущую
осциллятор, который, в свою очередь, модулирует обычную высокочастотную несущую.Оба временного мультиплексирования
и PCM использовались в Explorer-er VI.
PCM предлагает большие возможности в качестве системы телевизионной передачи, и Bell
Labs также активно работает над этой идеей. В микроволновом радио ИКМ обещает практически
В микроволновом радио ИКМ обещает практически
передача без помех. А поскольку сигнал PCM легко подается на магнитные
ленте, она также идеально подходит для ракетных и спутниковых телеметрий.
По сравнению с другими формами импульсной модуляции ИКМ имеет единственный недостаток:
более широкое требование к пропускной способности.Но по мере того, как системы телеметрии переходят от нижнего мегацикла
диапазоны до 2200 мкс. регион, этот недостаток становится все менее и менее важным.
Захватывающее будущее. Импульсная модуляция уже не просто теория.
это реальность. Несмотря на свою молодость, импульсная модуляция — это гигант, стоящий за главной страницей.
Новости освоения космоса.
По мере того, как мы исследуем границы космического пространства и ищем способы улучшить
и увеличьте способность обработки информации нашими существующими коммуникациями
систем становится все более очевидным, что импульсная модуляция является одним из наиболее
интересные разработки современной электроники.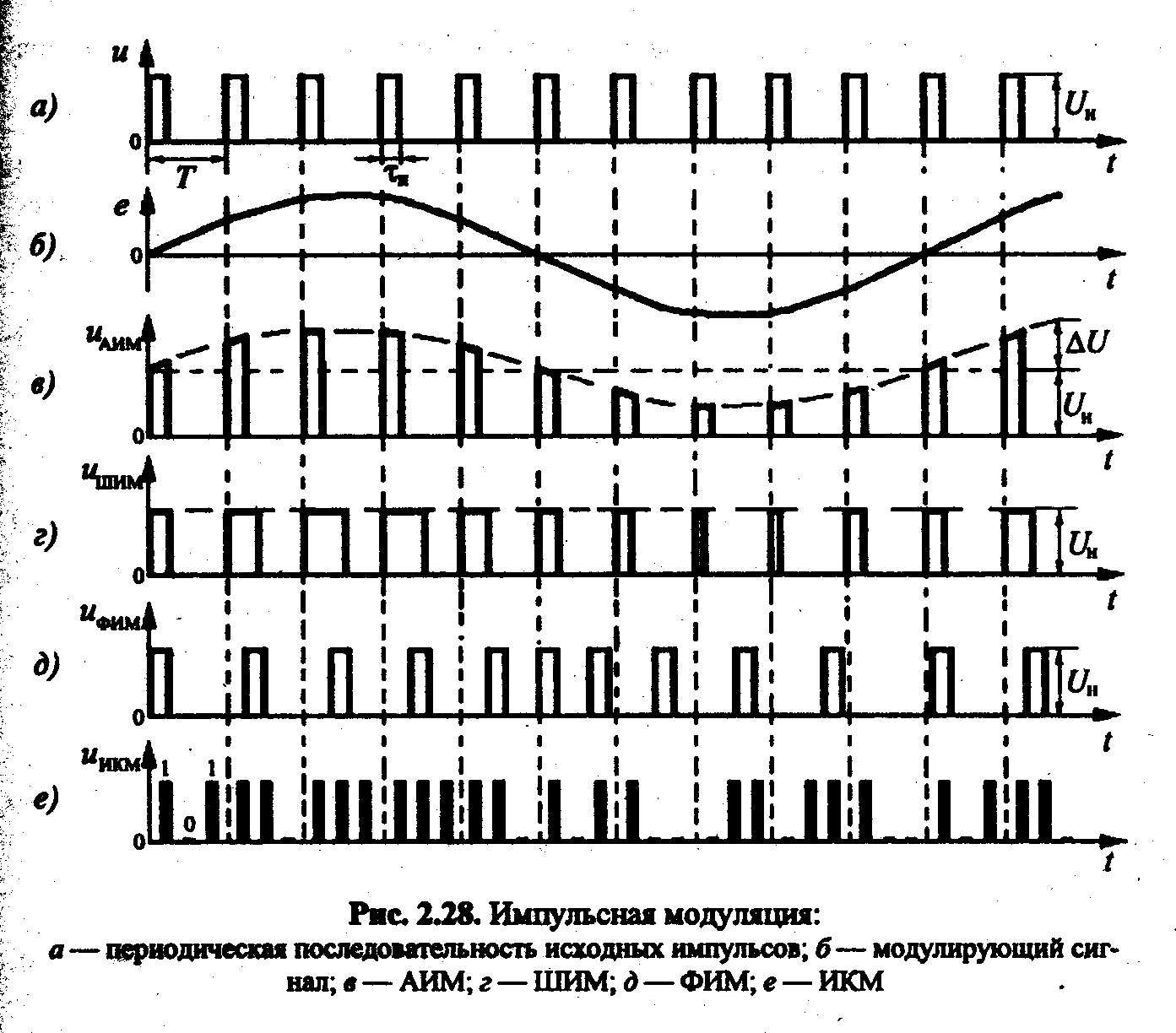
Опубликовано 1 июля 2019 г. (исходная версия 14 мая 2014 г.)
Применение широтно-импульсной модуляции в телесной связи
Мы изучаем применение широтно-импульсной модуляции (ШИМ) в телесной связи. Термин Body Coupled Communication используется для того, чтобы указать, что человеческое тело или его часть, например, рука, используется в качестве пути, по которому передается цифровая информация. Цифровая информация либо генерируется за счет связи с телом, например, в медицинском оборудовании в результате измерения, либо генерируется внешней схемой, закрепленной где-то на теле, и передается на терминал прикосновением к нему.В этой статье будет описан последний случай, где для наглядности прикосновение руки человека к дверной ручке приводит в действие механизм отпирания.
1. Введение
Поскольку все больше мобильных устройств, таких как сотовые телефоны, карманные компьютеры, MP3-плееры, планшеты и ноутбуки, в настоящее время становятся необходимыми и почти незаменимыми, возрастает потребность в более простом и удобном способе соединения друг с другом. Сети области тела (BAN) предлагают новые способы беспроводной связи, которые позволяют взаимодействовать между пользователем и устройствами, расположенными в непосредственной близости или соединенными непосредственно с телом пользователя.Существует несколько предлагаемых технологий, подходящих для BAN. Одной из технологий-кандидатов является Body Coupled Communication (BCC) или Intrabody Communication (IBC), впервые предложенная Циммерманом [1]. Телесно-связанная связь, в которой человеческое тело используется в качестве среды передачи сигнала, становится многообещающим решением для BAN, включая большое количество интересных потенциальных приложений.
Сети области тела (BAN) предлагают новые способы беспроводной связи, которые позволяют взаимодействовать между пользователем и устройствами, расположенными в непосредственной близости или соединенными непосредственно с телом пользователя.Существует несколько предлагаемых технологий, подходящих для BAN. Одной из технологий-кандидатов является Body Coupled Communication (BCC) или Intrabody Communication (IBC), впервые предложенная Циммерманом [1]. Телесно-связанная связь, в которой человеческое тело используется в качестве среды передачи сигнала, становится многообещающим решением для BAN, включая большое количество интересных потенциальных приложений.
Поскольку сигналы проходят через человеческое тело, электромагнитные шумы и помехи меньше влияют на передачу.Эта технология имеет ряд преимуществ по сравнению с обычными радиочастотными подходами. Поскольку его работа основана на связи ближнего поля (гальванической или емкостной), большая часть сигнала от передатчика ограничена областью тела без возможности сбора или создания помех другим внешним радиочастотным устройствам. Кроме того, поскольку частота связи может быть снижена без ущерба для размера антенны, энергопотребление передатчика и приемника также значительно снижается по сравнению с приложениями Bluetooth или Zigbee.В соответствии с подходом BCC используется низкочастотная несущая (менее 1 МГц); поэтому энергия не передается, что сводит к минимуму удаленное прослушивание и помехи для других BAN. Все вышеперечисленные характеристики делают эту технологию очень перспективным решением для BAN, приложений для мониторинга здоровья и систем идентификации, таких как ввод защитного PIN-кода в банкоматном терминале.
Кроме того, поскольку частота связи может быть снижена без ущерба для размера антенны, энергопотребление передатчика и приемника также значительно снижается по сравнению с приложениями Bluetooth или Zigbee.В соответствии с подходом BCC используется низкочастотная несущая (менее 1 МГц); поэтому энергия не передается, что сводит к минимуму удаленное прослушивание и помехи для других BAN. Все вышеперечисленные характеристики делают эту технологию очень перспективным решением для BAN, приложений для мониторинга здоровья и систем идентификации, таких как ввод защитного PIN-кода в банкоматном терминале.
В этой статье предлагается носимая система идентификации, использующая технологию BCC, но в основном изучается применение определенного метода цифровой модуляции в телекоммуникационных связях.Этот метод представляет собой цифровую версию известной широтно-импульсной модуляции (ШИМ), которая обеспечивает особые спектральные характеристики и простоту реализации. Вообще говоря, ШИМ — это «аналоговая» техника модуляции, в которой используется несущая прямоугольная волна. Эта модуляция несет информацию в рабочем цикле модулированной несущей прямоугольной волны. В нашем случае мы используем эту цифровую версию ШИМ, называемую B-ШИМ, используя только два различных рабочих цикла, как два разных символа, которые представляют два логических состояния, единицу и ноль.Позже будет объяснено, что два различных рабочих цикла предпочтительно дополняют друг друга; то есть они должны суммироваться до 100%. Для случая, описанного ниже, мы выбрали 25% и 75%, представляющие «логический ноль» и «логическую единицу» соответственно.
Эта модуляция несет информацию в рабочем цикле модулированной несущей прямоугольной волны. В нашем случае мы используем эту цифровую версию ШИМ, называемую B-ШИМ, используя только два различных рабочих цикла, как два разных символа, которые представляют два логических состояния, единицу и ноль.Позже будет объяснено, что два различных рабочих цикла предпочтительно дополняют друг друга; то есть они должны суммироваться до 100%. Для случая, описанного ниже, мы выбрали 25% и 75%, представляющие «логический ноль» и «логическую единицу» соответственно.
Чтобы получить очень компактный и малогабаритный передатчик, мы разработали наш модулятор на основе микроконтроллера общего назначения Microchip, почти без каких-либо других компонентов. Он включает в себя тактовый генератор и может быть запрограммирован для выполнения модуляции, а также для хранения необходимых идентификационных данных.Он может питаться от одного источника питания от 3 до 5,5 В, который может работать от одного или двух элементов литиевой батареи; или его можно заряжать с помощью индуктивной связи, когда он находится в непосредственной близости от приемника, непосредственно перед передачей.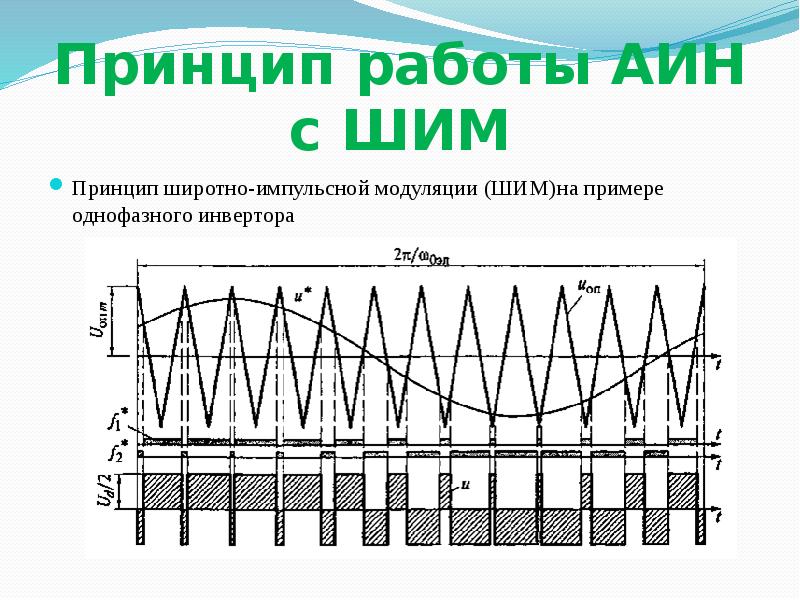
Из литературы хорошо известно [1, 2], что передача сигнала через тело человека может осуществляться одним из двух способов: гальваническим и емкостным. Конкретная цифровая модуляция, предложенная в этой статье, подходит для любого случая.Также из литературы следует, что большинство систем считают подходящей для передачи сигнала через тело человека центральную частоту в диапазоне от сотен кГц до нескольких МГц, например, 500 кГц [3]. Из-за поведения тела нет гарантии, что частотная характеристика приемника плоская. Вместо этого это зависит от электроники и поведения самого человеческого тела. В попытке объяснить такое поведение некоторые подходы [1, 4] предлагают электрическую модель человеческого тела для БКК.
2. Связь с корпусом
2.1. Методы распространения
Как упоминалось выше, в литературе были предложены два метода связи: емкостная и гальваническая. В обоих подходах пара электродов используется как на стороне передатчика, так и на стороне приемника для осуществления связи. Емкостная связь использует один «сигнальный» электрод, в то время как второй «заземляющий» электрод остается на воздухе. С другой стороны, гальваническая связь требует прямого контакта между парой электродов и телом человека.Существенное различие между этими двумя подходами заключается в том, что при емкостной связи окружающая среда может влиять на поведение и качество передаваемого сигнала, тогда как при гальваническом подходе на связь больше влияют диэлектрические параметры тканей тела [5].
Емкостная связь использует один «сигнальный» электрод, в то время как второй «заземляющий» электрод остается на воздухе. С другой стороны, гальваническая связь требует прямого контакта между парой электродов и телом человека.Существенное различие между этими двумя подходами заключается в том, что при емкостной связи окружающая среда может влиять на поведение и качество передаваемого сигнала, тогда как при гальваническом подходе на связь больше влияют диэлектрические параметры тканей тела [5].
2.2. Методы модуляции
В предыдущих исследованиях было протестировано несколько схем модуляции. OOK [6] и FSK [7, 8] являются наиболее часто используемыми методами модуляции в системах телесной связи.В других исследованиях [3, 9] предложены MSK и BPSK. В наших экспериментах были протестированы OOK, FSK и PWM. Хотя OOK имеет низкие требования к энергии и спектру, а реализация проста, он демонстрирует низкую устойчивость к шуму. С другой стороны, хотя FSK в некоторой степени преодолевает шумовые эффекты, по сравнению с OOK и B-PWM, реализация является сложной и менее энергоэффективной. Схема цифровой широтно-импульсной модуляции, предложенная в этой статье, оказывается подходящей и привлекательной техникой модуляции для технологии BCC, поскольку она отвечает основным требованиям, то есть низкое энергопотребление, простота реализации и помехоустойчивость, а также другие практические преимущества. которые будут описаны в разделе 3.
Схема цифровой широтно-импульсной модуляции, предложенная в этой статье, оказывается подходящей и привлекательной техникой модуляции для технологии BCC, поскольку она отвечает основным требованиям, то есть низкое энергопотребление, простота реализации и помехоустойчивость, а также другие практические преимущества. которые будут описаны в разделе 3.
2.3. Характеристика
Перед проектированием и внедрением WBAN (беспроводной сети на теле) необходимо учесть основные требования к ее конструкции. Настоящее исследование рассматривается по следующим критериям.
Пригодность. Сигнал, проходящий через тело человека, должен быть пригодным и не вредным для здоровья человека. В нашей реализации несущая частота находится в диапазоне от 500 кГц до 1 МГц, а ток ниже 20 мА; таким образом, он соответствует этому требованию в соответствии с международными нормами [10, 11].
Надежность. Надежность является решающим фактором для любой системы связи. По этой причине мы учитываем влияние тела человека и внешних шумов на сигнал. Спектральное поведение предлагаемого метода идентично для обоих логических этапов передаваемого сигнала.
Спектральное поведение предлагаемого метода идентично для обоих логических этапов передаваемого сигнала.
Энергоэффективность. Нет никаких сомнений в том, что энергопотребление имеет ключевое значение для носимых устройств. Таким образом, для схемы передатчика мы выбрали именно маломощный микроконтроллер.
Размер. Размер устройства также является важным фактором для любого носимого устройства. В настоящей реализации передатчик состоит из одного маломощного 8-контактного микроконтроллера (который включает в себя внутренний генератор) и одной пары электродов.
Безопасность. В этой статье, из-за дизайна системы идентификации, безопасность является важным фактором, хотя в литературе были предложены более сложные методы [12]. Представленная здесь система связи обеспечивает связь между двумя устройствами, которые имеют непосредственный контакт с телом.Сигнал передается только через тело человека; то есть не излучается; поэтому нет возможности прослушивания или вмешательства в другие WBAN без уведомления пользователя.
Скорость передачи данных. Высокая скорость передачи данных является проблемой для любой системы связи. В литературе упоминаются скорости передачи данных до 10 Мбит/с [13]. Характер разработанного здесь приложения не требует высокой скорости передачи данных; поэтому мы просто устанавливаем его на 10 kbps.
3. Двоичная широтно-импульсная модуляция (B-PWM)
3.1. Спектральные свойства
Принятие B-PWM основано на присущей ему характеристике, как показано ниже, занимая один и тот же спектр для обоих случаев передачи символов (логический ноль и логическая единица) из-за дополнительных значений выбранных рабочих циклов. . Это свойство имеет решающее значение для начальных стадий проектов Body Coupled или Intrabody Communication [14, 15], потому что поведение тела в сочетании с внешней электроникой обычно демонстрирует странное или трудно предсказуемое поведение.
Действие прерывания B-PWM может перемещать спектр модулированного сигнала в любое место за счет изменения частоты повторения потока несущих импульсов. На рисунке 1 показаны два дискретных потока импульсов (символы) с дополнительными рабочими циклами (25% и 75%). Мы покажем, что спектральный состав всех сегментов (символов) сигнала одинаков в предположении, что сигналы являются периодическими и могут быть проанализированы в ряды Фурье. Амплитуды соответствующих гармоник оказываются равными, но с разностью фаз 180°.
На рисунке 1 показаны два дискретных потока импульсов (символы) с дополнительными рабочими циклами (25% и 75%). Мы покажем, что спектральный состав всех сегментов (символов) сигнала одинаков в предположении, что сигналы являются периодическими и могут быть проанализированы в ряды Фурье. Амплитуды соответствующих гармоник оказываются равными, но с разностью фаз 180°.
Хорошо известно, что среднее значение периодического сигнала выглядит следующим образом: где – амплитуда импульсов, – время «включения», – период сигнала, а отношение – коэффициент заполнения. Если мы рассмотрим два различных символа и дополнительных рабочих циклов, станет очевидным, что их можно получить с помощью простого линейного процесса, то есть получить путем инвертирования и повышения на вольты плюс временной сдвиг. Поскольку временной сдвиг не создает никаких новых спектральных компонентов и из-за этого линейного соотношения, спектральные линии обоих сигналов идентичны, одна за другой, несмотря на фазовый сдвиг 180° (т.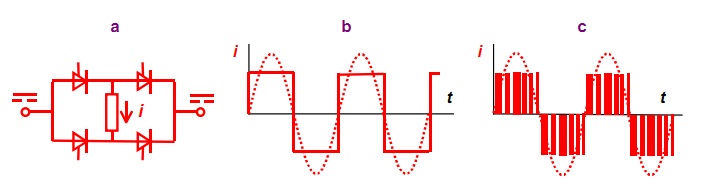 т. е., инвертированный), за единственным исключением среди спектров двух форм волны, которая представляет собой спектральную линию при нуле герца, то есть при постоянном токе. Это сходство спектрального содержания двух используемых символов гарантирует, что поведение комбинации тело/приемник будет идентичным для обоих случаев сигнализации, то есть логической «единицы» и логического «ноля».
т. е., инвертированный), за единственным исключением среди спектров двух форм волны, которая представляет собой спектральную линию при нуле герца, то есть при постоянном токе. Это сходство спектрального содержания двух используемых символов гарантирует, что поведение комбинации тело/приемник будет идентичным для обоих случаев сигнализации, то есть логической «единицы» и логического «ноля».
Как упоминалось ранее, в нашем случае модулированная B-PWM несущая генерируется на выходе микроконтроллера с однополярным питанием. Это означает, что передаваемый сигнал имеет определенное постоянное содержание в течение одного бита, равное среднему значению сигнала.Это содержимое DC (которое различается для двух логических уровней) является местом хранения цифровой информации. Вся система ведет себя как ступень высоких частот не только за счет соединения с корпусом, но в некоторых случаях и за счет передней части ресивера. Так что в любом случае кто-то может подумать, что информация, содержащаяся в компоненте постоянного тока каждого символа, будет потеряна из-за такого высокочастотного поведения.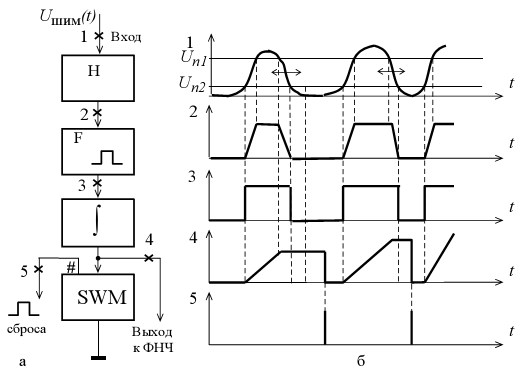 На самом деле, как будет показано ниже, действительно теряется постоянная составляющая, но не информация, так как информация заключается в переходах через ноль модулированного сигнала, а восстановление принятой формы сигнала в уровнях напряжения от рельса к рельсу занимает место у приемника.Поскольку проценты коэффициента заполнения остаются на предписанных значениях, потери информации нет, если демодулятор является простым фильтром нижних частот.
На самом деле, как будет показано ниже, действительно теряется постоянная составляющая, но не информация, так как информация заключается в переходах через ноль модулированного сигнала, а восстановление принятой формы сигнала в уровнях напряжения от рельса к рельсу занимает место у приемника.Поскольку проценты коэффициента заполнения остаются на предписанных значениях, потери информации нет, если демодулятор является простым фильтром нижних частот.
3.2. Выбор оптимального рабочего цикла
В соответствии с рисунком 1 мы можем изначально предположить, что разница между двумя взаимодополняющими значениями рабочего цикла должна быть максимальной, чтобы иметь наиболее разные уровни двух средних значений (жирная линия на рисунке 1). . Это приводит к крайнему выбору пары рабочих циклов 0 % и 100 %, что неприемлемо, поскольку отсутствует прерывание сигнала, как указано в разделе 3.1. С другой стороны, максимизация разности напряжений между двумя уровнями на этапе демодуляции, как описано выше, не является единственным критерием.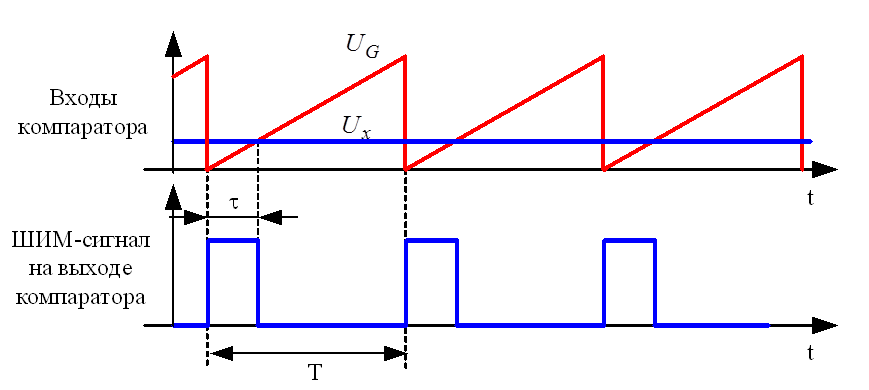 Это будет выяснено позже.
Это будет выяснено позже.
На рис. 2 показана часть модулированного сигнала, как она должна выглядеть после переднего конца приемника. Из-за связи и электроники приемника сигнал взвешивается выше и ниже горизонтальной прямой линии, чтобы получить нулевое среднее значение. Как описано ранее, из-за емкостной связи приемника/детектора и поведения высокочастотного фильтра входного каскада низкочастотное содержание передаваемого сигнала (включая среднее значение) будет потеряно.На рисунке 3 показан выход передатчика, а на рисунке 4 приведена блок-схема приемника. Фактические виды сигналов (захваты осциллографа) на приемнике показаны на рисунке 5 после 1-го и 2-го этапов. На верхней трассе рис. 5 показана осциллограмма на выходе первого (преобразователя тока в напряжение) каскада. Ясно, что низкочастотное содержание теряется, а форма сигнала взвешивается выше и ниже нулевого среднего значения (линия нуля вольт).На нижней кривой того же рисунка дан выходной сигнал второго каскада (инвертирующий компаратор напряжения), и показано, что форма сигнала, несущего данные, восстанавливается до двух исходных уровней. Также на рис. 6 (верхняя кривая) та же восстановленная форма сигнала на выходе компаратора напряжения представлена в другом масштабе времени, за которой следует (нижний график рис. 6) сигнал, полученный на выходе демодулирующего фильтра нижних частот. На нижней кривой рисунка 6 показано, что два разных рабочих цикла дают два разных уровня напряжения, несмотря на округление, которые соответствуют двум логическим состояниям данных.Та же форма сигнала (выходной сигнал ФНЧ) также показана на верхней кривой рисунка 7 для сравнения с выходным сигналом каскада формирования импульсов приемника.
Также на рис. 6 (верхняя кривая) та же восстановленная форма сигнала на выходе компаратора напряжения представлена в другом масштабе времени, за которой следует (нижний график рис. 6) сигнал, полученный на выходе демодулирующего фильтра нижних частот. На нижней кривой рисунка 6 показано, что два разных рабочих цикла дают два разных уровня напряжения, несмотря на округление, которые соответствуют двум логическим состояниям данных.Та же форма сигнала (выходной сигнал ФНЧ) также показана на верхней кривой рисунка 7 для сравнения с выходным сигналом каскада формирования импульсов приемника.
Как было сказано ранее, на первый взгляд на рис. 5 (верхняя кривая) кажется, что информация, лежащая в уровнях напряжения рис. К счастью, это не так, потому что информация на самом деле заключается в переходах через нуль модулированного сигнала, согласно скважности: сигнал, как показано на Рисунке 2 или Рисунке 5 (верхняя кривая), будет восстановлен на исходные уровни в приемнике после каскада компаратора напряжения.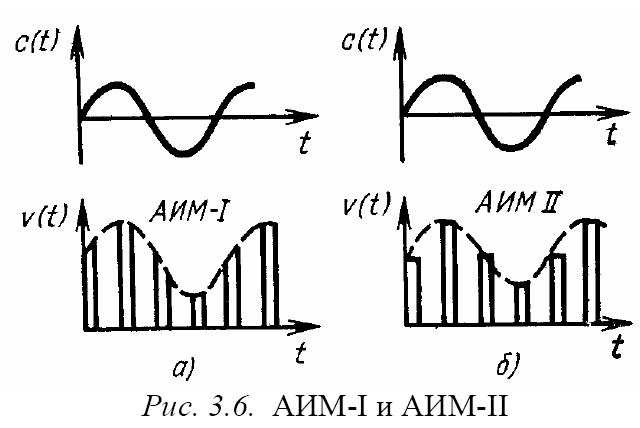 Поскольку сигнал может быть искажен и добавлен шум, теперь очевидно, что два уровня (соответствующие средние значения или огибающие) сигнала вблизи нулевой линии, рис. 2, должны быть как можно более различными. Это требование приводит к тому, что рабочие циклы приближаются к 50%. Это противоположно нашему предыдущему аспекту наиболее отчетливых рабочих циклов. На рисунке 2 показаны два случая модулированных сигналов с одинаковой начальной амплитудой, но с разными парами дополнительных рабочих циклов. Левая дорожка (а) имеет более отчетливые рабочие циклы, больше, чем 50%, а правая трасса (б) ближе к 50%.Очевидно, что правая трасса (б) имеет преимущество, так как две огибающие прямой (нулевое среднее значение) линии находятся на большем расстоянии (более отчетливы), чем соответствующие огибающие левой трассы (а). Поскольку 3-й этап, демодулирующий, представляет собой фильтр нижних частот, который принимает восстановленную, но все еще модулированную форму сигнала B-PWM и должен выдавать демодулированные данные на своем выходе, чем наиболее отчетливы рабочие циклы, тем лучше разделение уровней напряжения.
Поскольку сигнал может быть искажен и добавлен шум, теперь очевидно, что два уровня (соответствующие средние значения или огибающие) сигнала вблизи нулевой линии, рис. 2, должны быть как можно более различными. Это требование приводит к тому, что рабочие циклы приближаются к 50%. Это противоположно нашему предыдущему аспекту наиболее отчетливых рабочих циклов. На рисунке 2 показаны два случая модулированных сигналов с одинаковой начальной амплитудой, но с разными парами дополнительных рабочих циклов. Левая дорожка (а) имеет более отчетливые рабочие циклы, больше, чем 50%, а правая трасса (б) ближе к 50%.Очевидно, что правая трасса (б) имеет преимущество, так как две огибающие прямой (нулевое среднее значение) линии находятся на большем расстоянии (более отчетливы), чем соответствующие огибающие левой трассы (а). Поскольку 3-й этап, демодулирующий, представляет собой фильтр нижних частот, который принимает восстановленную, но все еще модулированную форму сигнала B-PWM и должен выдавать демодулированные данные на своем выходе, чем наиболее отчетливы рабочие циклы, тем лучше разделение уровней напряжения.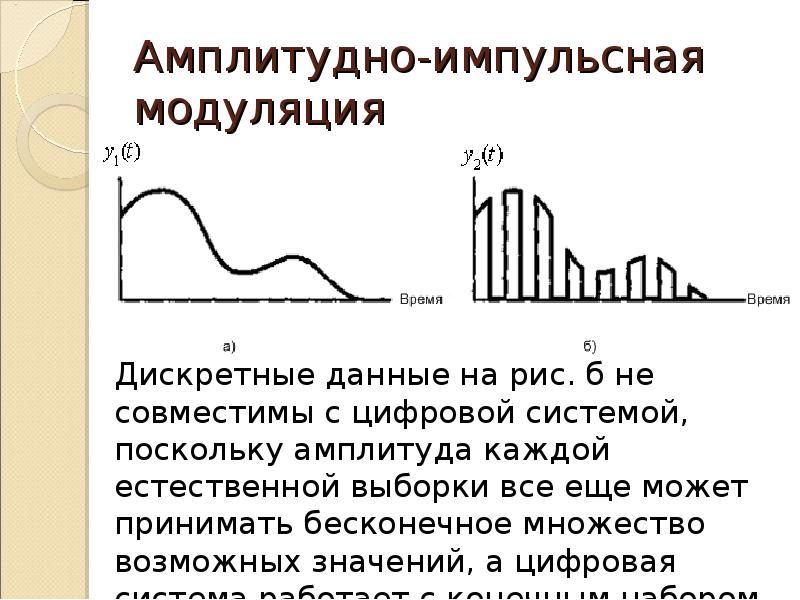 появляется. Поэтому необходим компромисс при выборе рабочего цикла.Поскольку нижнее значение рабочего цикла должно быть где-то между 0% и 50%, а верхнее значение рабочего цикла должно быть в диапазоне между 100% и 50%, выбираются средние значения двух диапазонов, т.е. составляет 25% и 75%, чтобы сохранить комплементарность пары (суммируя 100%), потому что таким образом мы получаем наиболее отчетливые уровни напряжения на выходе демодуляционного фильтра при сохранении прерывающего действия передаваемого сигнала .
появляется. Поэтому необходим компромисс при выборе рабочего цикла.Поскольку нижнее значение рабочего цикла должно быть где-то между 0% и 50%, а верхнее значение рабочего цикла должно быть в диапазоне между 100% и 50%, выбираются средние значения двух диапазонов, т.е. составляет 25% и 75%, чтобы сохранить комплементарность пары (суммируя 100%), потому что таким образом мы получаем наиболее отчетливые уровни напряжения на выходе демодуляционного фильтра при сохранении прерывающего действия передаваемого сигнала .
4. Аппаратная реализация и экспериментальные результаты
Для оценки предложенной модуляции был построен прототип пары передатчик-приемник.Как упоминалось выше, весь передатчик, включая модуляцию B-PWM, реализован на основе микроконтроллера общего назначения Microchip, который также включает в себя тактовый генератор. Микроконтроллер генерирует 64-битный ключ на выходном контакте. Сигнал ШИМ подается на тело человека через ответвитель. В настоящей реализации ответвитель состоит из двух медных электродов, разделенных диэлектриком размером 5 × 2,5 см (рис. 8). Один электрод подключен к земле, а второй подключен к выходному контакту.
8). Один электрод подключен к земле, а второй подключен к выходному контакту.
Положение соединителя на теле человека также влияет на связь [16, 17]. В наших экспериментах пара электродов передатчика располагалась вдоль руки. Оказалось, что сила сигнала выше при воздействии на предплечье и ниже при воздействии на кости запястья. Кроме того, мощность сигнала зависит от несущей частоты, как показано на рисунке 9.
На рисунке 10 показана экспериментальная установка.Передатчик с батарейным питанием (маленькая табличка) помещается на руку человека. Электрод удерживается на месте, касаясь кожи, с помощью двух резиновых лент.
На стороне приемника есть один электрод, который получает сигнал B-PWM, просто касаясь его. Для приемника были испытаны различные типы электродов. Оказалось, что достаточно одного электрода небольшого размера. Обнаруженный сигнал B-PWM после восстановления проходит через простой фильтр нижних частот с частотой среза выше скорости передачи данных, чтобы получить среднее значение и, таким образом, демодулировать его.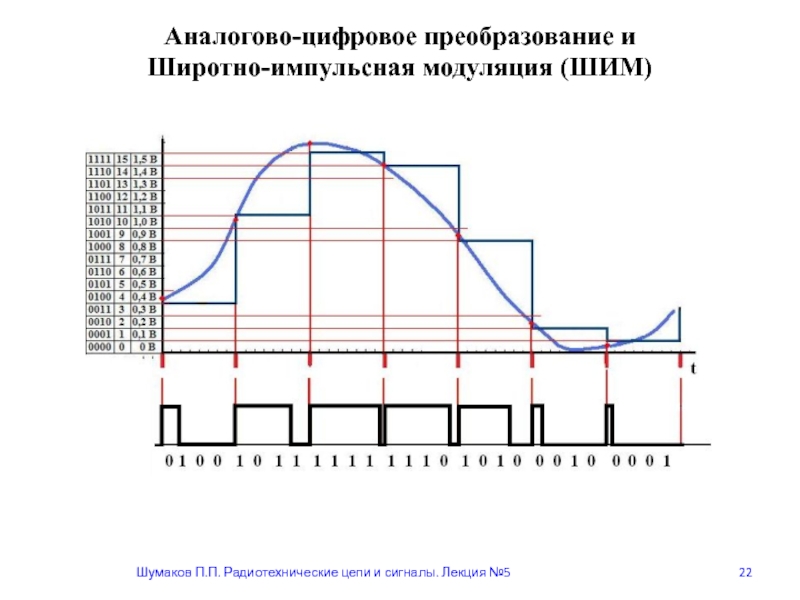 Демодулированный сигнал восстанавливается в соответствующем для периферии УСАПП виде и поступает в микроконтроллер. Микроконтроллер сравнивает входные данные с действительным пулом ключей, который уже находится в памяти. Если входные данные совпадают с действительным ключом, открывается электрический замок. Если они не совпадают или нет сигнала, замок остается закрытым, а на ЖК-экране отображается соответствующее сообщение. Аналогичный механизм может быть принят и применен к банковским системам банкоматов, обеспечивая дополнительную безопасность идентификации пользователя.
Демодулированный сигнал восстанавливается в соответствующем для периферии УСАПП виде и поступает в микроконтроллер. Микроконтроллер сравнивает входные данные с действительным пулом ключей, который уже находится в памяти. Если входные данные совпадают с действительным ключом, открывается электрический замок. Если они не совпадают или нет сигнала, замок остается закрытым, а на ЖК-экране отображается соответствующее сообщение. Аналогичный механизм может быть принят и применен к банковским системам банкоматов, обеспечивая дополнительную безопасность идентификации пользователя.
5. Заключение
В этой статье мы представили B-PWM как схему модуляции, подходящую для телесной связи. B-PWM оказался многообещающим методом модуляции для такого применения. Была разработана и испытана система идентификации, использующая BCC. Передатчик и приемник изолированы и общаются друг с другом только через тело человека.
Основным преимуществом предлагаемого метода является его простота реализации, особенно на модуляторе, по сравнению, например, с [18].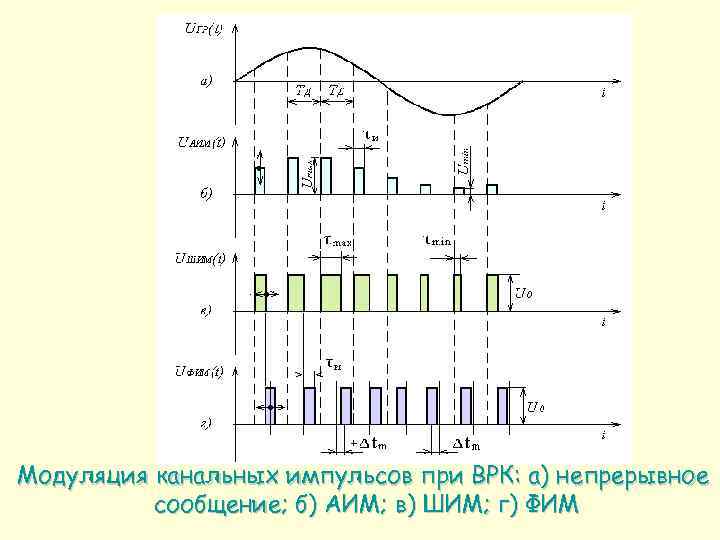 Это особенно важно, когда коммуникация, связанная с телом, должна применяться в устройствах общего назначения, включая носимые электронные устройства, такие как наручные компьютеры, такие как умные часы. Предложенная модуляция может быть легко реализована практически только в программном обеспечении любой микроконтроллерной системы без необходимости использования какого-либо другого компонента, кроме поверхности контакта с кожей. Кроме того, метод может быть расширен на более высокие уровни модуляции, то есть с использованием более двух символов (рабочих циклов), что дает возможность упаковывать больше битов на символ в тех случаях, когда требуется более высокая скорость передачи битов.Демодулятор на стороне приемника также легко реализуется как фильтр нижних частот. В большинстве случаев нет необходимости в извлечении часов.
Это особенно важно, когда коммуникация, связанная с телом, должна применяться в устройствах общего назначения, включая носимые электронные устройства, такие как наручные компьютеры, такие как умные часы. Предложенная модуляция может быть легко реализована практически только в программном обеспечении любой микроконтроллерной системы без необходимости использования какого-либо другого компонента, кроме поверхности контакта с кожей. Кроме того, метод может быть расширен на более высокие уровни модуляции, то есть с использованием более двух символов (рабочих циклов), что дает возможность упаковывать больше битов на символ в тех случаях, когда требуется более высокая скорость передачи битов.Демодулятор на стороне приемника также легко реализуется как фильтр нижних частот. В большинстве случаев нет необходимости в извлечении часов.
Конфликт интересов
Метод цифровой модуляции, описанный в этом документе, является частью предложения, представленного для возможного финансирования.