
Индуктивные датчики приближения | SICK
Индуктивные датчики приближения | SICK
IMI: Прочные цельнометаллические датчики
Твердые, тверже, самые твердые.
Цельнометаллические датчики IMI от SICK в закрытых корпусах из нержавеющей стали были разработаны для сложных случаев применения с высокими механическими и химическими нагрузками. Большие расстояния срабатывания и связь через интерфейс IO-Link обеспечивают высокую стабильность процессов и эксплуатационную готовность оборудования.
Выбор изделия
IMS: прочность для мобильных технологических машин
Максимальное время работы Вашей машины
Индуктивные датчики приближения IMS с сертификатом соответствия типа Е1 оптимально подходят для использования в мобильных технологических машинах и в любых погодных условиях: защита от сброса нагрузки, высокая электромагнитная совместимость, большой диапазон напряжения и температуры, исключительная прочность и герметичность.
Выбор изделия
Датчики с тройным расстоянием срабатывания
Стабильные процессы и высокая степень готовности оборудования благодаря 3хSn
Благодаря трёхкратному расстоянию срабатывания даже небольшие размеры достигают экстремальных диапазонов сканирования в несколько сантиметров. Это позволяет сэкономить место в вашей машине и снизить риск механического повреждения из-за большего расстояния до обнаруживаемого объекта. Результатом является высокая эксплуатационная готовность оборудования.
Выбор изделия
Индуктивный аварийный выключатель
Контроль безопасного положения до PL е
Для надежного контроля позиции, например в робототехнике и в случаях применения устройств FTF (автоматически управляемое транспортное средство), компактная конструктивная форма и гибкая техника соединений индуктивных предохранительных выключателей фирмы SICK играют решающую роль. Они не только миниатюрные и универсальные, но и работают бесконтактно и поэтому имеют особенно малый износ.
Они не только миниатюрные и универсальные, но и работают бесконтактно и поэтому имеют особенно малый износ.
Выбор изделия
Индуктивные датчики приближения
Готов для решения любых задач. в любой окружающей среде.
Индуктивные датчики приближения от SICK регистрируют, считают или позиционируют металлические предметы с максимальной точностью и надёжностью — практически без износа и независимо от воздействий окружающей среды.
Они впечатляют своей точностью и максимальной эксплуатационной готовностью на протяжении длительного срока службы.
подробнее
IMA: аналоговые датчики
Пополнение в семействе изделий
Аналоговые индуктивные датчики приближения IMA прекрасно подходят для экономичного и надёжного контроля маршрутов передвижения и положения объектов.
Наряду с вариантами с трёхкратным расстоянием срабатывания до 40 мм теперь доступны и варианты с однократным расстоянием срабатывания до 15 мм.
Выбор изделия
Smart Sensors
Поставщики информации для Индустрии 4.0
Smart Sensors генерируют и принимают данные и информацию, которые выходят за рамки классических сигналов переключения или измеренных параметров процесса. Благодаря этому, они обеспечивают значительное повышение эффективности, дают большую гибкость и улучшенную надёжность планирования для профилактического обслуживания оборудования.
подробнее
Quick Filter
Filter
Цилиндрический с резьбой
Цилиндрический, гладкий
Материал корпуса
Специальные случаи применения
Прямоугольный корпус (Ш x В x Г)
Особые свойства
Фильтровать по:
Коммуникационный интерфейс, детальное описание
—
IO-Link V1. 0
0
(196)
IO-Link V1.1
(33)
COM2 (38,4 kBaud)
(1)
Применить фильтр
Вид подключения
—
Кабель
(636)
Кабельный ввод
(14)
Кабель с разъемом
(54)
Кабель с разъемом и гайкой с накаткой
(11)
Разъем
(734)
Разъем M8
(1)
Кабель со штекером M12
(3)
Разъем M12
(10)
Применить фильтр
Расстояние срабатывания, макс.
—
0 … 1 mm
(30)
1 … 2 mm
(244)
2 … 4 mm
(366)
4 … 8 mm
(328)
8 … 10 mm
(46)
10 … 20 mm
(376)
20 … 60 mm
(36)
Применить фильтр
1 453 результатов:
Результаты 1 — 8 из 1453
Индуктивные датчики приближения
IQY
- Расстояние срабатывания Sn:
2 mm - Монтаж:
Вровень - Прямоугольный корпус (Ш x В x Г):
8 mm x 40 mm x 8 mm - Электрическое исполнение:
Пост. ток, 3-проводный
ток, 3-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Нормально закрытый - Вид подключения:
Кабель, 3-жильный, 4 m
 ток, 3-проводный
ток, 3-проводныйИндуктивные датчики приближения
IQY
- Расстояние срабатывания Sn:
2 mm - Монтаж:
Вровень - Прямоугольный корпус (Ш x В x Г):
8 mm x 40 mm x 8 mm - Электрическое исполнение:
Пост. ток, 3-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Нормально закрытый - Вид подключения:
Кабель с разъемом M8, 3-конт., 100 mm
Индуктивные датчики приближения
IMB
- Расстояние срабатывания Sn:
4 mm - Монтаж:
Вровень - Конструкция корпуса:
Короткий корпус - Электрическое исполнение:
Пост. ток, 4-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Комплементарный - Вид подключения:
Разъем M12, 4-конт. - Smart Sensor:
Enhanced Sensing, Эффективный обмен данными, Диагностика
 ток, 4-проводный
ток, 4-проводныйИндуктивные датчики приближения
IMB
- Расстояние срабатывания Sn:
4 mm - Монтаж:
Вровень - Конструкция корпуса:
Стандарт - Электрическое исполнение:
Пост. ток, 4-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Комплементарный - Вид подключения:
Разъем M12, 4-конт. - Smart Sensor:
Enhanced Sensing, Эффективный обмен данными, Диагностика

Индуктивные датчики приближения
IMB
- Расстояние срабатывания Sn:
15 mm - Монтаж:
Вровень - Конструкция корпуса:
Стандарт - Электрическое исполнение:
Пост. ток, 2-проводный - Функция выходного сигнала:
Нормально открытый - Вид подключения:
Разъем M12, 4-конт.
Индуктивные датчики приближения
IMB
- Расстояние срабатывания Sn:
15 mm - Монтаж:
Вровень - Конструкция корпуса:
Стандарт - Электрическое исполнение:
Пост. ток, 4-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Комплементарный - Вид подключения:
Разъем M12, 4-конт. - Smart Sensor:
Enhanced Sensing, Эффективный обмен данными, Диагностика
 ток, 4-проводный
ток, 4-проводныйИндуктивные датчики приближения
IME
- Конструкция корпуса:
Короткий корпус - Расстояние срабатывания Sn:
20 mm - Монтаж:
Псевдозаподлицо - Электрическое исполнение:
Пост. ток, 3-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Нормально закрытый - Вид подключения:
Разъем M12, 4-конт.

Индуктивные датчики приближения
IME
- Конструкция корпуса:
Короткий корпус - Расстояние срабатывания Sn:
38 mm - Монтаж:
С выступающей частью - Электрическое исполнение:
Пост. ток, 3-проводный - Переключающий выход:
PNP - Функция выходного сигнала:
Нормально открытый - Вид подключения:
Разъем M12, 4-конт.
Результаты 1 — 8 из 1453
Преимущества
Надежные, высокопроизводительные, прочные. индуктивные датчики приближения фирмы «SICK»
Миллионы индуктивных датчиков приближения используются практически в любой отрасли промышленности. Они распознают металлические объекты бесконтактным способом. Индуктивные датчики — чрезвычайно надежные устройства с долгим сроком службы. Благодаря применению современной технологии ASIC, датчики фирмы «SICK» обеспечивают максимальную точность и надежность. Идет ли речь о датчиках цилиндрической или прямоугольной формы, с одинарным, двойным или тройным расстоянием срабатывания или о специальных датчиках для работы во взрывоопасных зонах — фирма «SICK» всегда предлагает подходящие решения, отвечающие поставленным требованиям. Тем самым, отраслевые и индивидуальные задачи автоматизации становятся интеллигентными и надежными.
Они распознают металлические объекты бесконтактным способом. Индуктивные датчики — чрезвычайно надежные устройства с долгим сроком службы. Благодаря применению современной технологии ASIC, датчики фирмы «SICK» обеспечивают максимальную точность и надежность. Идет ли речь о датчиках цилиндрической или прямоугольной формы, с одинарным, двойным или тройным расстоянием срабатывания или о специальных датчиках для работы во взрывоопасных зонах — фирма «SICK» всегда предлагает подходящие решения, отвечающие поставленным требованиям. Тем самым, отраслевые и индивидуальные задачи автоматизации становятся интеллигентными и надежными.
Широкий выбор
Маленький или большой, цилиндрический или квадратный: широкая гамма индуктивных датчиков приближения предлагает подходящий датчик для любого случая применения. Выбирайте из большого числа различных конструктивных форм и материалов, таких как нержавеющая сталь, VISTAL®, металл, пластмасса или с тефлоновым покрытием (PTFE). В области электроустановок и технике электрических соединений в Вашем распоряжении находятся различные варианты для использования в промышленном секторе. И если среди них все-таки не окажется подходящего Вам датчика, фирма «SICK» — даже при специфических пожеланиях заказчика — быстро и несложно предложит Вам датчики, изготовленные по Вашему специальному заказу.
В области электроустановок и технике электрических соединений в Вашем распоряжении находятся различные варианты для использования в промышленном секторе. И если среди них все-таки не окажется подходящего Вам датчика, фирма «SICK» — даже при специфических пожеланиях заказчика — быстро и несложно предложит Вам датчики, изготовленные по Вашему специальному заказу.
Надёжное обнаружение в любых условиях эксплуатации
Индуктивные датчики приближения от SICK всегда работают надёжно независимо от сложности условий эксплуатации. Они обеспечивают надёжные результаты обнаружения даже в самых жёстких условиях. Благодаря чрезвычайно прочной конструкции они стойко переносят высокие механические нагрузки от ударов или вибраций, а также устойчивы к электромагнитным помехам. Будь то пыль, грязь, экстремальные температуры или изменение температуры, влажная и мокрая среда или контакт с химикатами, такими как чистящие средства: датчикам от SICK можно доверять.
Прецизионные, высокопроизводительные и удобные для коммуникации
Благодаря новейшей технологии SICK-ASIC процессы с неисправностями и ошибками относятся к далекому прошлому. Датчики с этой технологией обладают гораздо лучшими характеристиками, чем когда-либо прежде. Все равно, о каком расстоянии срабатывания идет речь: от однократного до четырехкратного, индуктивные датчики приближения фирмы «SICK» с наивысшей точностью и надежно обнаруживают объекты. Как бы то ни было, фирма «SICK» ежедневно движется дальше в направлении будущего. Расширенные возможности диагностики, а также коммуникация через IO-Link 1.1 превращают датчики в надежные поставщики данных для «Индустрии 4.0». Благодаря интеллигентной сенсорной технике комплексные постановки задач, которые до сих пор решались в системе управления, теперь могут просто решаться непосредственно в датчике. Это упрощает профилактическое техническое обслуживание и сокращает время простоев.
Датчики с этой технологией обладают гораздо лучшими характеристиками, чем когда-либо прежде. Все равно, о каком расстоянии срабатывания идет речь: от однократного до четырехкратного, индуктивные датчики приближения фирмы «SICK» с наивысшей точностью и надежно обнаруживают объекты. Как бы то ни было, фирма «SICK» ежедневно движется дальше в направлении будущего. Расширенные возможности диагностики, а также коммуникация через IO-Link 1.1 превращают датчики в надежные поставщики данных для «Индустрии 4.0». Благодаря интеллигентной сенсорной технике комплексные постановки задач, которые до сих пор решались в системе управления, теперь могут просто решаться непосредственно в датчике. Это упрощает профилактическое техническое обслуживание и сокращает время простоев.
Загрузки
Наверх
Пожалуйста, подождите…
Ваш запрос обрабатывается, это может занять несколько секунд.
Датчики положения (индуктивный датчик, датчик Холла)
Датчики положения (индуктивный датчик, датчик Холла) |
Для измерения скорости вращения и определения положения различных узлов двигателя используются датчики положения. К ним относятся: датчик положения коленчатого вала (ДПКВ), датчик положения распределительного вала (ДПРВ) или датчик фазы (ДФ), датчик скорости (ДС), датчики ABS.
Сигнал ДПКВ используется для определения частоты вращения КВ, а также его мгновенного положения. Т.к. частоты вращения распределительного и коленчатого валов соотносятся как 1:2, то только по сигналу ДПКВ невозможно однозначно определить находится ли поршень двигателя, движущийся к ВМТ, на такте сжатия или выпуска. Фазный датчик на распределительном валу передает эту информацию в блок управления.
В качестве примера приведен сигнал с авто ВАЗ.
Сигналы ДПКВ (синий) и ДПРВ (зеленый)
К наиболее распространенным типам этих датчиков относятся: индуктивный (электромагнитный) датчик и датчик Холла.
Индуктивный датчик
Этот тип датчика наиболее распространен в качестве ДПКВ. Датчик монтируется поблизости от подвижного элемента, называемого маркерным диском. Этот элемент представляет собой стальной диск с зубьями, который жестко зафиксирован на коленчатом валу (может находиться как со стороны ременной передачи, так и непосредственно на маховике КВ).
Расположение ДПКВ
1. ДПКВ
2. Маркерный диск
3. Разъем датчика
Датчик состоит из обмотки с сердечником из постоянного магнита. Когда зуб проходит перед датчиком, это приводит к усилению магнитного потока, проходящего через обмотку. Напротив, увеличение зазора ослабляет этот поток. Происходит изменение магнитного поля, которое вызывает появление индукционного тока в обмотке. Амплитуда напряжения переменного тока сильно возрастает по мере повышения частоты вращения маркерного диска (от нескольких мВ до значений более 100 В).
Амплитуда напряжения переменного тока сильно возрастает по мере повышения частоты вращения маркерного диска (от нескольких мВ до значений более 100 В).
Конструкция индуктивного датчика
1. Обмотка
2. Метка на маркерном диске в виде пропущенных зубьев
3. Постоянный магнит
Маркерный диск может иметь как пропуски зубьев, так и более широкие зубья.
Кол-во зубьев маркерного диска зависит от его назначения и модели авто. В качестве маркерного диска для КВ наиболее распространенным является диск с 60-ю зубьями, при этом два зуба пропущены. Зазор с пропущенными зубьями предназначен для отметки определенного положения коленчатого вала и служит как установочная метка для синхронизации блока управления.
На маркерных дисках системы ABS пропуск зубьев отсутствует, т.к. в данной системе положение колеса не принципиально, имеет значение только скорость вращения.
Пример сигнала индуктивного датчика ABS
В варианте исполнения для ДПРВ, маркерный диск может иметь всего один зуб, т. к. в данном случае нет необходимости измерять скорость вращения, нужно определить только положение РВ для определения фазы работы двигателя.
к. в данном случае нет необходимости измерять скорость вращения, нужно определить только положение РВ для определения фазы работы двигателя.
Для дальнейшего анализа электронный блок производит преобразование аналогового сигнала в цифровой. Амплитуда напряжения сигнала пропорциональна скорости прохождения подвижной детали перед датчиком. Напряжение также в значительной степени зависит от расстояния между вершинами зубьев и поверхностью датчика, как правило, зазор составляет 1±0,5 мм. Подсчитывая число импульсов в течение заданного промежутка времени, электронный блок может определить скорость вращения КВ.
Индуктивный датчик подключается к контроллеру экранированной парой проводов с заземлением экранирующей оплетки на кузов автомобиля.
Пример схемы подключения ДПКВ
Для записи осциллограммы индуктивного датчика, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему со стороны ЭБУ.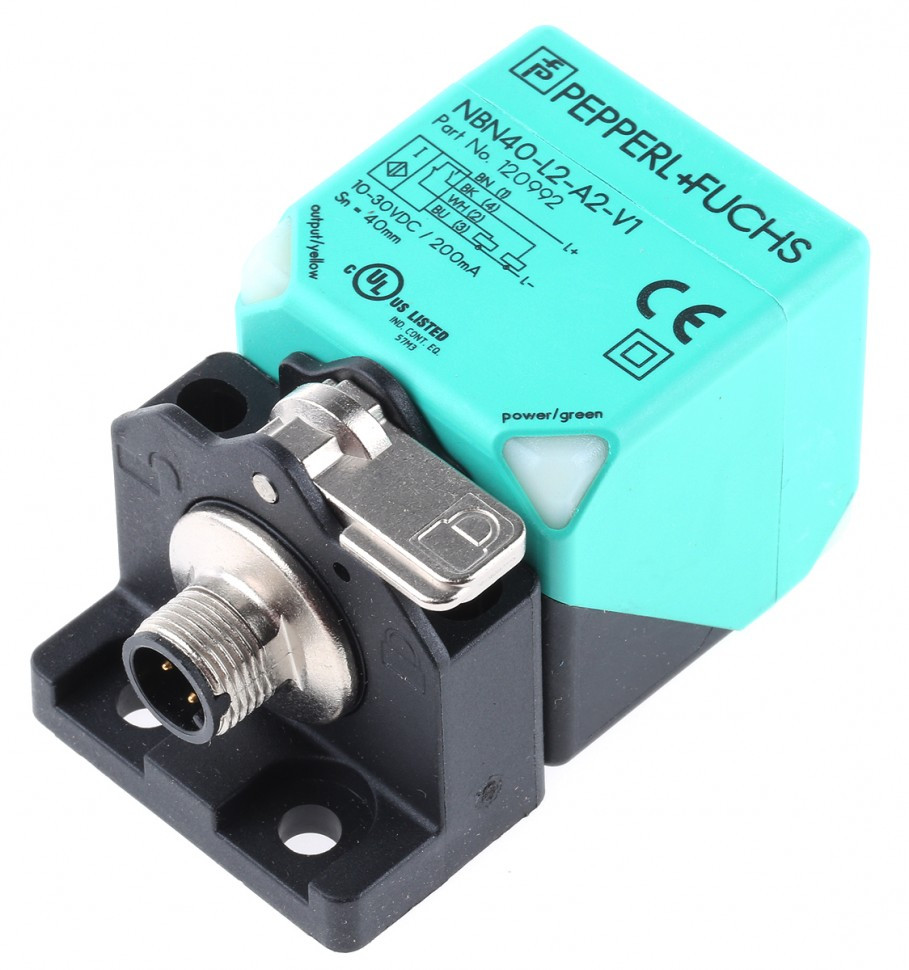
Подключение мотор-тестера к ДПКВ (цветовая маркировка проводов указана в качестве примера)
Датчик Холла
В таких датчиках использован эффект Холла. Интегральная схема датчика Холла располагается между маркерным диском и постоянным магнитом.
Когда зуб маркерного диска проходит у элемента датчика, то он изменяет величину магнитного поля, пронизывающего элемент Холла. За счет этого возникает сигнал напряжения, который находится в милливольтновом диапазоне и не зависит от относительной скорости между датчиком и маркерным диском. Оценивающая электронная схема, встроенная в интегральную схему, вырабатывает сигнал в форме прямоугольных импульсов.
Датчик Холла
1.
Постоянный магнит
2.
Интегральная схема Холла.
3.
Маркерный диск
4.
Разъем датчика
Как правило, датчик Холла имеет три вывода: питание +5В (+12В), «земля», сигнальный выход.
Пример схемы подключения ДПРВ
Для записи осциллограммы датчика Холла, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему ЭБУ.
Подключение мотор-тестера к ДПРВ (цветовая маркировка проводов указана в качестве примера)
Для записи сигнала ДПКВ рекомендуется использовать 2ой аналоговый канал мотор-тестера, для сигнала ДПРВ — 3ий канал. При наличии нескольких ДПРВ, можно использовать любой свободный аналоговый канал.
Настройка аналогового канала для индуктивного датчика
Настройка аналогового канала для датчика Холла
Дополнительные возможности ПО:
Автоподстройка линейки по любому «стандартному ДПКВ» (тема на форуме)
Одновременный анализ сигналов ДПКВ и ДПРВ позволяет проверить работу этих датчиков, а также правильность установки КВ и РВ (соответствие меток ГРМ).
автор: Евгений Куришко
Пром-А Урал
Если бы не инновационное производство, то важного преимущества только что выпущенной линейки датчиков Е2В, а именно – соотношения цены и качества могло и не быть. Индуктивный датчик положения E2B может подойти ко всем промышленным условиям производства, потому что у него есть четыре размера в обычном и экранированном комплекте. Также у него есть два варианта подключения и четыре вида вывода. Отлично видимый, закруглённый индикатор облегчает установку датчика в любом месте.
Индуктивный датчик положения E2B может подойти ко всем промышленным условиям производства, потому что у него есть четыре размера в обычном и экранированном комплекте. Также у него есть два варианта подключения и четыре вида вывода. Отлично видимый, закруглённый индикатор облегчает установку датчика в любом месте.
Маркировка, сделанная с помощью лазера, облегчает идентификацию. У индуктивных датчиков серии E2B есть кольцевой светодиодный, яркий индикатор, позволяющий контролировать рабочее состояние аппарата. Благодаря этому, вы сможете выбрать тот датчик, который нужен вам, и с лёгкостью поменять его.
Индуктивные датчики положения E2B славятся своими хорошими показателями и широким модельным рядом, и возможностью выбора именно того датчика, который нужен для выполнения задачи покупателя. У датчиков есть огромный диапазон размеров, а именно: М8, М12, М18, М30. Их изготовляют со стандартной или двойной дистанцией реагирования. Кроме экранированных датчиков бывают ещё и неэкранированные. У неэкранированных датчиков корпус бывает короткий и длинный, так что покупатель может выбрать прибор на своё усмотрение.
У неэкранированных датчиков корпус бывает короткий и длинный, так что покупатель может выбрать прибор на своё усмотрение.
Описание и область применения датчиков:
- Датчики делают с кабелем или с разъёмом.
- Производители упаковочных машин — там такие датчики встречаются часто.
- Станкостроение.
- Создатели системы контроля доступа.
- Создатели конвейерной системы.
- Автомобильная промышленность.
- Перемещение товаров.
И многие другие отрасли. Индуктивные датчики положения округлой формы из современной линейки Omron E2B были специально созданы как экономически выгодное решение — с ними вам больше не нужно переплачивать за функции, которые вы никогда не будете применять. Фирма Omron создаёт приборы E2B по собственной уникальной методике под названием «hot-melt» (термоплавкого производства). Она позволяет существенно снизить расходы без ухудшения качества, эффективности и надёжности готового товара.
Отличительные черты Е2В:
- Отличный видимый индикатор.
- Лазерная маркировка на кабеле прибора.
- Прибор устойчив к различным вибрациям: IEC 60947-5-2 (10 — 55 Гц).
- Температура, при которой датчик может работать: от -25°C до 70°C.
- Водонепроницаемый: IP67.
Индуктивные бесконтактные датчики — неконтактные переключатели
Индуктивный бесконтактный датчик используется для определения наличия или контроля положения
металлических объектов или
объектов, имеющих металлические части. Индуктивные датчики не реагируют на другие материалы. При
появлении в зоне
срабатывания металлического объекта индуктивный датчик замыкает или размыкает цепь. Поставляемые
индуктивные датчики
могут быть нормально замкнутыми или нормально разомкнутыми.
Принцип действия бесконтактного индуктивного датчика базируется на изменении магнитного поля,
создаваемого встроенной в
датчик катушкой индуктивности при попадании в его активную зону металлического объекта.
Бесконтактные индуктивные датчики имеют в своей конструкции LC-генератор, который создает переменное
магнитное поле. При
внесении в это поле металлического объекта в нем возникают вихревые токи, которые вызывают изменение
амплитуды колебаний
генератора. Вырабатываемый аналоговый сигнал зависит от расстояния между чувствительной поверхностью
индуктивного
датчика и металлическим объектом. Для подачи выходного сигнала в датчике используется триггер, который
преобразует
аналоговый сигнал в логический.
Под заказ возможно утопленное исполнение датчиков.
Тип NPN, нормально разомкнутые
Расстояние срабатывания индуктивного датчика зависит от формы и размеров объекта, а также от
материала
объекта.
Максимальное расстояние срабатывания обеспечивается при железном объекте. Использование других
металлов уменьшает
расстояние срабатывания (см. схему).
При уменьшении размеров объекта менее стандартного, расстояние срабатывания уменьшается.
Сравнение индуктивных и ёмкостных датчиков положения
Автор: Mark Howard, Zettlex UK Ltd
Ссылка на оригинал: technical articles/inductive vs. capacitive_rev4.0
Перевод на русский язык подготовлен компанией АВИ Солюшнс.
Введение
Некоторые индуктивные и ёмкостные датчики выглядят очень похоже и неудивительно что инженеры-разработчики бывают сбиты с толку их сходством. И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Принцип работы – Ёмкостные датчики
Когда исследователя Эвальда Юргена фон Клейста ударило электрическим током от лабораторного прибора в 1745 году, он внезапно понял, что есть возможность сохранять электрический заряд в больших количествах. Возможно, ненамеренно он построил первый в мире конденсатор. Конденсатор действует как накопитель электрической энергии и, как правило, состоит из двух проводящих пластин, разделённых непроводящим материалом (диэлектриком). В качестве диэлектрика обычно выступает воздух, пластик или керамика. Простая математическая модель конденсатора приведена на рис. 1.
Рис. 1 Простая модель конденсатора (С)
1 Простая модель конденсатора (С)
Диэлектрическая проницаемость ε включает в себя две составляющие — εr и ε0, где εr – это относительная магнитная проницаемость (иногда называемая диэлектрической постоянной) материала между пластинами и ε0 – электрическая постоянная (ε0 ≈ 8.854×10−12 Ф/м).
Многие датчики работают по ёмкостному принципу, в особенности тактильные датчики таких устройств, как планшеты и мобильные телефоны. Эти ёмкостные датчики определяют отсутствие или присутствие пальца человека и работают как альтернатива кнопочному переключателю. Присутствие пальца человека – или скорее воды в нём – приводит к изменению относительной диэлектрической проницаемости вызывающей в свою очередь изменение ёмкости.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения, который работает путём измерения изменений ёмкости происходящих из-за изменения размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость как при изменении расстояния между пластинами (d) так и при изменении площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
1, ёмкость как при изменении расстояния между пластинами (d) так и при изменении площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения. Принцип его работы основан на измерении величины емкости, которая изменяется при изменении размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость прямо пропорциональна как расстоянию между пластинами (d), так и площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Для того чтобы хранить сколько-нибудь значительный заряд, расстояние между пластинами d должно быть существенно меньше площади пластин. Величина d обычно гораздо меньше 1 мм. По этой причине такая технология хорошо подходит для измерения нагрузки и тензометрических датчиков, поскольку может давать сравнительно большие изменения сигнала при маленьком измеряемом расстоянии. Похожим образом, ёмкостные линейные или вращающиеся датчики могут быть сконструированы таким образом, что перемещение вызывает изменение площади перекрытия пластин A. Например, один комплект пластин расположен на подвижной части датчика, а другой комплект расположен на статичной части. Как только два этих комплекта смещаются относительно друг друга, площадь А изменяется.
По этой причине такая технология хорошо подходит для измерения нагрузки и тензометрических датчиков, поскольку может давать сравнительно большие изменения сигнала при маленьком измеряемом расстоянии. Похожим образом, ёмкостные линейные или вращающиеся датчики могут быть сконструированы таким образом, что перемещение вызывает изменение площади перекрытия пластин A. Например, один комплект пластин расположен на подвижной части датчика, а другой комплект расположен на статичной части. Как только два этих комплекта смещаются относительно друг друга, площадь А изменяется.
К сожалению, кроме изменения размеров конденсатора, ёмкость также чувствительна и к другим факторам. Если пластины конденсатора окружены воздухом то диэлектрическая проницаемость будет изменяться из-за влияния температуры и влажности, поскольку диэлектрическая постоянная воды отличается от воздуха. Близко расположенный объект, который изменяет проницаемость окружающего пространства, тоже будет вызывать изменения ёмкости. В случае тактильного датчика, вода в пальцах вызывает местное изменение проницаемости и, соответственно, срабатывание датчика. Вот почему работа нереагирующего тактильного датчика может быть улучшена, если намочить конец пальца.
В случае тактильного датчика, вода в пальцах вызывает местное изменение проницаемости и, соответственно, срабатывание датчика. Вот почему работа нереагирующего тактильного датчика может быть улучшена, если намочить конец пальца.
За исключением случаев, когда окружающая среда датчика может быть герметично замкнута или жёстко контролируема, ёмкостные датчики не подходят для применения в жёстких условиях окружающей среды, где есть возможность проникновения посторонних веществ или больших изменений температуры. Неудивительно, что ёмкостные датчики мало подходят для применения в условиях, где высока вероятность образования конденсата при снижении температуры.
При неизменном физическом устройстве датчика, расстояние между пластинами датчика должно поддерживаться малым относительно размеров пластин конденсатора и выдерживаться в достаточно узком допуске. Это может накладывать очень высокие требования по механической точности установки датчика в конечное изделие и может быть непрактично и неэкономично, поскольку различие тепловых расширений, вибраций или механических допусков конечного изделия могут привести к изменению расстояния между пластинами и, таким образом, к искажению измерений.
Более того ёмкостный эффект основан на хранении электрического заряда на пластинах конденсатора. Если конечное изделие, куда устанавливается датчик, может создавать электростатическое поле в процессе своего перемещения – от трения, скольжения или вращения деталей – это может искажать показания датчика. В экстремальных случаях датчик не будет работать совсем или, что хуже, электростатические возмущения будут приводить к правдоподобным, но неверным показаниям датчика. В некоторых случаях обязательно заземление компонентов конечного изделия для рассеивания заряда с пластин датчика. Часто это является необходимым в ёмкостных датчиках угла, поскольку вращение вала создаёт статический заряд из-за относительного перемещения подшипников, шестерён, шкивов и прочее.
Принцип работы – Индуктивные датчики
В 1831 Майкл Фарадей открыл, что протекание переменного тока по одному проводнику индуцирует протекание тока в противоположном направлении во втором проводнике. С тех пор магнитная индукция стала широко использоваться как физический принцип построения датчиков для измерения положения и скорости – резольверы (СКВТ), сельсины и дифференциальный трансформатор для измерения линейных перемещений. Основы теории можно объяснить, рассматривая две катушки: передающую катушку (Tx), по которой протекает переменный ток, и приёмную катушку (Rx), в которой индуцируется ток.
С тех пор магнитная индукция стала широко использоваться как физический принцип построения датчиков для измерения положения и скорости – резольверы (СКВТ), сельсины и дифференциальный трансформатор для измерения линейных перемещений. Основы теории можно объяснить, рассматривая две катушки: передающую катушку (Tx), по которой протекает переменный ток, и приёмную катушку (Rx), в которой индуцируется ток.
Рисунок 2. Закон индукции Фарадея
Величина напряжения на приёмной обмотке пропорциональна относительным площадям, геометрии и смещению двух катушек. Однако, как и с ёмкостной технологией, на поведение катушек могут влиять и другие факторы. Одним из таких факторов является температура, но её влияние может быть нивелировано путём использования нескольких приёмных катушек и вычислении положения по отношению полученных сигналов (как в дифференциальном трансформаторе). Соответственно, даже в случае изменений температуры, её влияние на результат компенсируется, поскольку отношение сигналов является неизменным для любого положения.
В отличие от ёмкостных способов измерения, индуктивная технология гораздо менее подвержена влиянию посторонних частиц, таких как вода или грязь. Поскольку катушки могут находиться на относительно большом расстоянии друг от друга, точность установки составляет гораздо меньше проблем, и основные компоненты индуктивного датчика могут быть установлены с относительно свободными допусками. Это не только помогает снизить стоимость датчика и конечного изделия, но также позволяет использовать компоненты с защитным покрытием или заливкой, что позволяет датчикам противостоять таким внешним воздействующим факторам, как длительное погружение, сильные удары, вибрация или наличие взрывоопасной газовой или пылевой среды.
Индуктивные датчики обеспечивают надёжный, стабильный и устойчивый к внешним воздействиям подход к измерению положения и, таким образом, является предпочтительным выбором в приложениях, где жёсткие условия окружающей среды являются нормой, например, в военной технике, авиакосмической промышленности, промышленных установках и системах для нефтегазового сектора.
Несмотря на надёжность и устойчивость к внешним воздействиям, традиционные индуктивные датчики имеют ряд отрицательных сторон, которые препятствуют их более широкому распространению. В их конструкции есть проводники, намотанные на катушки, которые должны быть намотаны достаточно точно, чтобы обеспечить необходимую точность измерений положения. Для того, чтобы обеспечить наличие достаточно сильного электрического сигнала, необходимы обмотки с большим количеством витков. Такая конструкция с намотанной катушкой делает традиционный индуктивный датчик громоздким, тяжёлым и дорогим.
Инженеры, рассматривающие возможность применения индуктивных датчиков положения, часто задают вопрос о сложностях, связанных с электромагнитными шумами. В данном случае такая озабоченность является неуместной, если принять во внимание, что эти датчики, как резольверы, успешно используются много лет в жёсткой электромагнитной установке в корпусах электродвигателей для коммутации и управления скоростью. Что касается температурной стабильности, то устойчивость к жёстким условиям может быть достигнута при использовании дифференциального подхода, так, что электромагнитная энергия, поступающая в различные части системы, эффективно компенсирует друг друга. Вот почему индуктивные датчики, такие как резольверы и дифференциальные линейные трансформаторы, являются предпочтительным выбором в ответственных применениях, например, в гражданской авиации в течение многих лет.
Что касается температурной стабильности, то устойчивость к жёстким условиям может быть достигнута при использовании дифференциального подхода, так, что электромагнитная энергия, поступающая в различные части системы, эффективно компенсирует друг друга. Вот почему индуктивные датчики, такие как резольверы и дифференциальные линейные трансформаторы, являются предпочтительным выбором в ответственных применениях, например, в гражданской авиации в течение многих лет.
Другой подход к индуктивным датчикам
Другой подход к индуктивным датчикам использует тот же физический принцип, но в нём применяются плоские конструкции на основе печатных плат вместо намотанных катушек. Именно этот подход и применяется Zettlex. Это означает, что обмотки могут быть изготовлены путём травления меди или при помощи нанесения на самые различные материалы подложки: полиэстерную плёнку, бумагу, эпоксидный слоистый пластик и даже на керамику. Такие печатные конструкции можно изготовить более точно, чем намотанные катушки. Вследствие чего достигается более высокая точность измерения при меньших затратах, размерах и массе, сохраняя в то же время все положительные свойства индуктивной технологии.
Вследствие чего достигается более высокая точность измерения при меньших затратах, размерах и массе, сохраняя в то же время все положительные свойства индуктивной технологии.
Рисунок 3. Пример грязного, но полностью работоспособного индуктивного датчика с плоской печатной обмоткой.
Датчики серии IncOders компании Zettlex – это бесконтактные устройства для прецизионного измерения угла. Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие. Угловые энкодеры Zettlex не восприимчивы к посторонним веществам, что делает их идеально подходящими к жёстким условиям окружающей среды, где ёмкостные устройства работают ненадёжно.
Заключение
Преимущества каждого из трёх подходов сведены вместе в таблице ниже. Можно сделать вывод, что из трёх приведённых подходов, нетрадиционный индуктивный подход, использующий печатные обмотки, обеспечивает наибольшее количество преимуществ.
|
|
|
|
|
|
Высокое разрешение |
|
|
|
|
Высокая повторяемость |
|
|
|
|
Высокая точность |
|
✓ |
|
|
Устойчивость к грязи, воде или конденсату |
|
|
|
|
Устойчивость к электростатике |
|
|
✓ |
|
Устойчивость к электромагнитным помехам |
|
|
|
|
Низкий температурный дрейф |
|
|
|
|
Простота установки |
|
|
|
|
Компактный |
|
|
|
|
Лёгкий |
|
|
|
|
Экономичный |
|
|
|
Рисунок 4. Таблица сравнительных преимуществ каждой технологии
Таблица сравнительных преимуществ каждой технологии
EMG Automation GmbH / Induktive Sensoren
Принцип работы датчиков серии SMI (Индуктивное измерение положения полосы) основан на электромагнитной индукции. Два центральных датчика располагаются по краям полосы под определенным углом к линии прокатки и симметрично относительно центра системы, положение полосы, проходящей между датчиками, должно быть максимально симметричным по отношению к датчикам. Центральный датчик расположенный над полосой, выполняет функции передатчика, а датчик напротив – функции приемника.
Электронный блок SMI2.11.x снабжает передатчики синусоидальным напряжением переменного тока, который регулируется по частоте и амплитуде. На каждой катушке передатчика формируется четко различимое переменное магнитное поле – оно направлено на приемник. Приемник определяет разную интенсивность переменного поля в зависимости от положения полосы. Возникшее переменное напряжение создает аналоговые выходные сигналы для положения края полосы, оценивая уровень зависимого от частоты диапазона.
Индуктивная система измерения содержит комплексные механизмы самоанализа. Отдельные сигналы складываются в сообщения «измерительное оборудование в порядке» и «обнаружена полоса».
Система не нуждается в обслуживании, она надежна в эксплуатации, а модульная конструкция и улучшенная симметричность индуктивных катушек делают серию SMI-датчиков одним из самых точных устройств измерения положения центра полосы, а также системой, которая подстраивается под требования заказчика.
Так как система нечувствительна к внешним воздействиям, даже не ферримагнитные материалы, такие как алюминий, медь, бронза и аустенитные хромоникелевые сплавы (напр. DIN 1.4301), так же надежно обнаруживаются системой SMI.
Преимущества для заказчика:
- Широкий диапазон возможной толщины полосы от 0,05 мм до 16 мм (система для полосы с иными параметрами доступна под заказ)
- Датчики нечувствительны к:
- Изменяющемуся сопротивлению изоляции из-за накопления пыли на измерительных приборах
- Возмущению электростатического поля, например, в случае инспекции технического персонала
- Воде, пару и парам металла, которые образуются в процессе химической обработки полосы
- Пыли с частицами дерева и металла, которая образуется в процессе механической обработки полосы
- Ионизирующей атмосфере печи
Серия индуктивных датчиков «ЕМГ» представлена следующими моделями и решениями:
Подробную информацию и техническую спецификацию вы найдете в наших брошюрах. Мы будем рады подобрать для вас оптимальное решение. Свяжитесь с нами!
Мы будем рады подобрать для вас оптимальное решение. Свяжитесь с нами!
Датчики положения
Бесконтактный выключатель (датчик) — это полупроводниковый преобразователь, который управляет состоянием внешней цепи в зависимости от положения контролируемого объекта. При этом определение положения объекта происходит без механического контакта преобразователя и объекта.
В системах автоматизации бесконтактные выключатели, как правило, работают как первичные датчики контроля положения рабочих элементов оборудования, сигналы с которых далее передаются, в зависимости от задачи, на счетчики продукции, контроллеры перемещения, в системы аварийно-предупредительной сигнализации и т. п.
В зависимости от принципа действия бесконтактные выключатели бывают индуктивными, емкостными и оптическими.
Индуктивные бесконтактные выключатели могут применяться для подсчета или контроля положения металлических объектов. Чувствительный элемент такого датчика — катушка индуктивности с магнитопроводом, разомкнутым в сторону рабочей поверхности.
Чувствительный элемент такого датчика — катушка индуктивности с магнитопроводом, разомкнутым в сторону рабочей поверхности.
При подаче питания перед активной поверхностью бесконтактного выключателя образуется электромагнитное поле. При появлении в нем объекта из металла колебания генератора затухают, происходит падение демодулированного напряжения, срабатывает триггер, и переключается коммутационный элемент.
Контролируемым объектом для бесконтактных индуктивных выключателей может служить любой металлический предмет достаточных размеров, например: стальная пластина, выступ на валу, головка болта на соединительной муфте и др.
Емкостные бесконтактные выключатели могут применяться для подсчета или контроля положения объектов как из металла, так и из диэлектрических материалов. Также их можно использовать для контроля уровня жидких сред и сыпучих материалов.
Чувствительным элементом емкостного датчика являются вынесенные к рабочей поверхности пластины конденсатора. Приближение к этой поверхности контролируемого объекта из любого материала приводит к изменению емкости конденсатора, параметров генератора и, в итоге, к переключению коммутационного элемента.
Приближение к этой поверхности контролируемого объекта из любого материала приводит к изменению емкости конденсатора, параметров генератора и, в итоге, к переключению коммутационного элемента.
Емкостные датчики могут применяться в системах автоматизации, например, для позиционирования заготовок из древесины или пластмассы; для подсчета стеклянной тары; в качестве датчиков уровня электропроводных и неэлектропроводных жидкостей в емкостях, а также сыпучих материалов — опилок, зерна и др. — в бункерах; в качестве бесконтактных водонепроницаемых «кнопок» для включения различных устройств посетителями в бассейнах и аквапарках и т. д.
Оптические бесконтактные выключатели применяют для позиционирования или подсчета любых объектов. Использование в них инфракрасного излучения минимизирует влияние на срабатывание выключателей засветки от посторонних и фоновых источников света.
Оптические бесконтактные выключатели серии AR подразделяются на две группы:
- диффузные — с приемом луча, рассеянно отраженного от объекта;
- барьерные — с приемом прямого луча от излучателя.
Диффузный оптический выключатель имеет размещенные в одном корпусе излучатель и приемник. Срабатывание датчика происходит, когда в рабочей зоне в пределах дальности действия датчика появляется объект достаточных размеров, и в приемник поступает луч, рассеянно отраженный от контролируемого объекта.
Барьерный оптический выключатель состоит из излучателя и приемника, которые размещены в отдельных корпусах. От излучателя к приемнику идет прямой луч. При перекрытии этого луча контролируемым объектом происходит срабатывание датчика.
Конечные выключатели Энкодеры
Ёмкостные бесконтактные выключатели Индуктивные бесконтактные выключатели
Оптические датчики положения Оптические датчики фотометок
Датчики Холла Магнитогерконовые датчики
Датчики технического зрения
Принцип работы
Ультразвуковые датчики приближения
Принцип работы ультразвуковых датчиков основан на измерении времени между посылкой ультразвукового импульса и регистрацией отражённого импульса.
Диапазон измерений — от нескольких миллиметров до нескольких метров.
Точность измерения – 1 мм.
Измеряет расстояние до любых предметов: твёрдых, жидких, порошкообразных, гранулированных, прозрачных, цветных, грязных и чистых, гладких и шероховатых, сухих и мокрых.
Нечувствительны к звуку, шуму, пыли, вибрации, температуре, воде.
Применения: измерение размера, высоты, уровня, качества, контура, прогиба, диаметра, дистанции.
Ограничения: спроектированы для работы только в атмосферном воздухе, не могут измерять расстояние до объектов с высокой температурой.
Функции
Датчики рассеянного луча (Diffuse)
Датчик регистрирует ультразвуковой сигнал, отражённый от самого предмета.
Датчики отражённого луча (Reflex)
Датчик регистрирует ультразвуковой сигнал, отражённый от специального металлического отражателя. Если между датчиком и отражателем появляется предмет, то сигнал не проходит и датчик это регистрирует.
Датчики прерывания луча (Thru-beam)
Датчик состоит из двух частей и регистрирует предметы, находящиеся на пути распространения узкосфокусированного ультразвукового луча от передатчика к приёмнику.
Синхронизация
Несколько близко расположенных друг к другу ультразвуковых датчиков могут быть синхронизированы между собой так, чтобы отражённые сигналы регистрировались только теми датчиками, которые их сгенерировали, а не соседними.
Фотоэлектрические (оптические) датчики приближения
Различают фотоэлектрические датчики со световым и лазерным лучом. Световые датчики могут только детектировать наличие объекта, цвет и контрастность, а лазерные датчики могут с высокой точностью измерить расстояние до объекта. Принцип измерения расстояния лазерными датчиками основан на измерении времени между посылкой лазерного импульса и регистрацией отражённого импульса.
Ультразвук распространяется внутри конуса с вершиной в точке излучения, а свет распространяется в виде луча, поэтому оптические датчики могут обнаруживать более мелкие объекты. Оптические датчики обладают более высоким быстродействием, чем ультразвуковые. Фотоэлектрические Thru-beam датчики действуют на большем расстоянии, чем ультразвуковые, а датчики рассеянного света – наоборот.
Оптические датчики обладают более высоким быстродействием, чем ультразвуковые. Фотоэлектрические Thru-beam датчики действуют на большем расстоянии, чем ультразвуковые, а датчики рассеянного света – наоборот.
Функции
Датчики рассеянного света
Датчик регистрирует световой сигнал, отражённый (рассеянный) от самого предмета. Датчик с функцией подавления фона может обнаруживать объекты, находящиеся в определённой зоне чувствительности.
Датчики отражённого света
Свет, излучаемый диодом, фокусируется линзой и через поляризационный фильтр посылается на отражатель. Часть отражённого света проходит через другой поляризационный фильтр и попадает в приёмник. Фильтры настроены так, что приёмник реагирует только на тот свет, который отразился от отражателя, а не от какого-нибудь другого предмета. Если между излучателем и отражателем появляется предмет, то сигнал не проходит и датчик это регистрирует.
Датчики прерывания луча
Датчик состоит из двух частей и регистрирует предметы, находящиеся на пути распространения светового луча от излучателя к приёмнику.
Оптоволоконные проводники
Оптоволоконные проводники присоединяются к излучателю и приёмнику, так что световой сигнал распространяется теперь между кончиками этих световодов, которые можно вынести в труднодоступные и взрывоопасные места (так как нет электрической связи – только оптическая)
Лазерный датчик рассеянного луча
Лазерный датчик может с высокой точностью измерять расстояние до объекта, находящегося в зоне чувствительности.
Датчик цвета
Датчик может различать три цвета и несколько градаций каждого цвета.
Датчик контраста
Различает контрастные объекты
Индуктивные датчики приближения
Индуктивные датчики приближения используются для бесконтактного обнаружения металлических объектов. Датчик генерирует переменное поле, линии которого выходят из чувствительного элемента и пронизывают чувствительную зону датчика (до нескольких сантиметров). При появлении в этой зоне электро- или магнитопроводящего предмета поле ослабляется, и датчик обнаруживает этот объект.
Ограничения: высокочастотные поля могут оказывать влияние на работу индуктивных датчиков.
Коэффициент редукции
Расстояние срабатывания датчика (рабочая дистанция) указывается для объекта со стандартными параметрами (материал, размер, форма) — квадратная стальная пластинка, у которой толщина равна 1 мм, а длина стороны равна:
— диаметру круга, вписанного в зону чувствительного элемента датчика
— или трём номинальным рабочим дистанциям, если эта величина больше диаметра того круга.
Поэтому, если реальные объекты сделаны из другого материала (алюминий, бронза, латунь и т.п.) или/и имеют более миниатюрные размеры, то рабочую дистанцию следует уменьшить на соответствующий коэффициент редукции (взятый из каталожных таблиц).
Емкостные датчики приближения
Емкостной датчик приближения представляет собой конденсатор с металлическими концентрическими обкладками-электродами, развёрнутыми вдоль одной плоскости. Если в электрическое поле у поверхности электродов попадает объект, то ёмкость конденсатора меняется и датчик обнаруживает предмет. Емкостные датчики могут детектировать любые объекты: твёрдые, порошкообразные, а жидкие — даже сквозь неметаллические стенки (уровень сока в бутылке).
Если в электрическое поле у поверхности электродов попадает объект, то ёмкость конденсатора меняется и датчик обнаруживает предмет. Емкостные датчики могут детектировать любые объекты: твёрдые, порошкообразные, а жидкие — даже сквозь неметаллические стенки (уровень сока в бутылке).
Рабочая дистанция, на которой детектируются объекты, указывается для заземленных металлических предметов. Для объектов из других материалов необходимо пересчитывать рабочую дистанцию по каталожной кривой зависимости дистанции от диэлектрической проницаемости материала.
Магнитные датчики положения
Магнитные датчики положения (Magnetic Proximity Sensors) — регистрируют объект с меткой — постоянным магнитом.
Датчик обнаруживает магнитную метку даже за стенкой из немагнитного материала, пропускающего магнитное поле.
Используя стальной магнитопровод, можно вынести магнитный датчик из зоны с высокой температурой.
Магнитные датчики для пневматических цилиндров
Магнитные датчики для пневматических цилиндров (Magnetic Cylinder Sensor) используются для определения по магнитной метке положения поршня внутри пневмоцилиндра.
С помощью дискретных магнитных датчиков можно настроить две концевые точки переключения хода поршня, а с помощью магнитного датчика с аналоговым выходом — контролировать положение поршня.
Как выбрать
Общее для всех датчиков приближения
- Степень защиты корпуса
- Класс взрывозащиты
- Температура окружающей среды
- Напряжение питания
- Номинальный рабочий ток
- Выходной сигнал
- PNP/NPN
- Релейный (NO / NC)
- Аналоговый
- 0..20 мА
- 4..20 мА
- 0..10 В
- Частотный выход
- IO-Link
- AS-i
- Подключение:
- Коннектор М8
- Коннектор М12
- Кабель.
Ультразвуковые датчики
- Принцип работы:
- Рассеянного луча (Diffuse)
- Отражённого луча (Reflex)
- Прерывания луча (Thru-beam)
- Зона чувствительности
- Погрешность измерения
- Точность повторения измерений
- Настраиваемая зона нечувствительности (гистерезис)
- Стандартный размер предмета
- Частота переключения
- Задержка срабатывания
- Задержка готовности после подачи питания
- Температурная компенсация
- Функция синхронизации нескольких датчиков
- Конструкция
- Со встроенным сенсором
- С фиксированным положением головки сенсора
- С крутящейся головкой сенсора
- С выносным сенсором (на какое расстояние)
- Со встроенным сенсором
- Настройка:
- С помощью потенциометров
- С помощью программатора
- Специальные функции:
- Контроль листов в стопке (бумаги, картона или пластика).
- Контроль листов в стопке (бумаги, картона или пластика).

Фотоэлектрические (оптические) датчики
- Принцип работы:
- Рассеянного луча
- Отражённого луча
- Прерывания луча
- Датчик контраста
- Датчик цвета
- Лазерный датчик
- Зона чувствительности
- Точность измерения (для лазерных датчиков)
- Световой выход
- Вход деблокировки (для тестирования работоспособности).
Индуктивные датчики приближения
- Рабочая дистанция
- Схема подключения:
- 2-х проводная
- 3-х проводная
- 4-х проводная
- Время отклика
- Частота переключения
- Задержка готовности после подачи питания
- Точность повторения измерений
- Температурный дрейф
- Размеры свободной зоны (в границах которой не должны находиться посторонние металлические предметы)
- Зона гистерезиса (например, объект обнаруживается при приближении на расстояние менее 3 мм, а теряется из вида при удалении на расстояние более 5 мм)
- Коэффициент редукции (если есть).

Емкостные датчики приближения
- Рабочая дистанция
- Схема подключения:
- 2-х проводная
- 3-х проводная
- 4-х проводная
- Точность повторения измерений.
11 мифов об индуктивных датчиках положения
Загрузите эту статью в формате PDF.
Мы долго ждали, и теперь он широко внедряется, а именно — искусственный интеллект (ИИ). Теперь мы видим, как ИИ сделает автоматические машины более эффективными, прибыльными и улучшит нашу жизнь — от заводов-автоматов, беспилотных автомобилей и грузовиков до роботов-водителей. В основе этих автоматов и автомобилей лежит их способность точно измерять положение и движение.
Существует множество способов измерения положения, но одна из быстро развивающихся технологий — индуктивный датчик положения. Точность, помехозащищенность и экономичность — вот некоторые из преимуществ этой технологии. Ниже развеиваются некоторые заблуждения об индуктивных датчиках положения, а также проводится сравнение с другими сенсорными технологиями, такими как датчики с эффектом Холла и магниторезистивные датчики.
Ниже развеиваются некоторые заблуждения об индуктивных датчиках положения, а также проводится сравнение с другими сенсорными технологиями, такими как датчики с эффектом Холла и магниторезистивные датчики.
1. Индуктивные датчики используют индуктивность для измерения положения.
Этикетка может сбивать с толку, но на самом деле индуктивные датчики не измеряют индуктивность. Вместо этого они используют электромагнитную индукцию магнитного поля в металлической мишени наряду с хорошо известными свойствами трансформатора с воздушным сердечником и законом Фарадея для точного определения места нарушения этого магнитного поля мишенью. Это может показаться сложным для многих из нас, кто забыл все, что мы узнали о теории электромагнитного поля в школе. Проще говоря, индуктивные датчики измеряют возмущение магнитного поля проводящей целью.
Кроме того, это магнитное поле не создается постоянным магнитом, который необходим для датчиков Холла и магниторезистивных датчиков. Вместо этого он генерируется первичной обмоткой трансформатора (рис. 1) .
Вместо этого он генерируется первичной обмоткой трансформатора (рис. 1) .
1. Индуктивный датчик положения генерирует магнитное поле с помощью обмоток трансформатора.
Две вторичные катушки используются для обнаружения этого магнитного поля, и, как и в случае с трансформатором, мы используем закон Фарадея для преобразования этого поля в напряжение. Металлическая цель, помещенная в это магнитное поле, будет индуцировать вихревые токи, противодействующие магнитному полю, и понижать напряженность поля на цели до нуля.Будучи размещенными в разных физических местах, две приемные катушки будут определять разное напряжение. Положение цели можно вычислить, просто вычислив отношение этих двух напряжений приемной катушки.
2. Индуктивные датчики положения неточны.
Легко развеять этот миф, потому что индуктивные датчики положения очень точны, превосходят их при более высоких температурах, когда другие магнитные системы имеют проблемы. Основная причина точности индуктивных датчиков положения заключается в том, что они не зависят от нелинейной природы постоянного магнита.Вместо этого они просто ищут нарушение самогенерируемого магнитного поля.
Основная причина точности индуктивных датчиков положения заключается в том, что они не зависят от нелинейной природы постоянного магнита.Вместо этого они просто ищут нарушение самогенерируемого магнитного поля.
Таким образом, погрешность ниже ± 0,1% во всем диапазоне измерения может быть достигнута при комнатной температуре. Погрешности ниже ± 0,3% достигаются при изменении температуры и при изменении зазора между целью и датчиком. Кроме того, полный алгоритм разработан так, чтобы либо исключить колебания температуры, либо минимизировать их влияние.
Например, индуктивный датчик положения будет возбуждать магнитное поле с частотой от 1 до 6 МГц, но в нем используется LC-генератор.Хотя обе эти величины могут изменяться с температурой, это не влияет на положение.
Причина в том, что вторичные каналы приема используют синхронную демодуляцию (рис. 2) , которая является функцией первичного генератора. Этот дрейф никак не повлияет на амплитуду принимаемых сигналов. Помимо температуры, металлические предметы рядом с датчиком могут влиять на магнитное поле.
Помимо температуры, металлические предметы рядом с датчиком могут влиять на магнитное поле.
2. Синхронный демодулятор может использоваться для устранения различий из-за колебаний температуры.
В результате требуется некоторый уровень калибровки, но калибровка не изменяется с температурой. Например, LX3302A компании Microchip Technology использует восемь калибровочных сегментов. Кроме того, 13-битные аналого-цифровые преобразователи (АЦП) и 32-битные процессоры помогают устранить любые ошибки вычислений и квантования, которые могут возникнуть, обеспечивая разрешение 12 бит на выходе во всем диапазоне измерений.
3. Индуктивные датчики положения дороги.
Нет ничего необычного в том, чтобы получить лучшее из обоих миров — высокую производительность по разумной цене, — но индуктивные датчики тоже здесь.В то время как датчики на эффекте Холла и магниторезистивные датчики требуют, чтобы постоянный магнит был изготовлен с надлежащими допусками и прочностью для получения приличной точности, индукционным датчикам требуется только кусок металла в качестве мишени, что позволяет пользователю сэкономить на цене магнита.
Хотя печатная плата должна быть больше для прокладки дорожек датчика, это обычно стоит значительно меньше, чем стоимость магнита. А если у вас есть дополнительное место на печатной плате, эта часть может быть бесплатной. Таким образом, индуктивный датчик положения является более экономичным решением по сравнению с решениями на основе эффекта Холла и магниторезистивными датчиками, поскольку он обеспечивает измерение магнитного поля без магнита.
4. Индуктивные датчики положения чувствительны к внешнему магнитному полю.
Современные автоматы создают больше паразитных магнитных полей, чем когда-либо прежде, что вызывает проблемы с датчиками Холла и магнито-рецепторами. Индуктивные датчики положения используют активную демодуляцию для подавления этих полей рассеяния (рис. 3) .
3. Двигатель и большой ток могут создавать сильные паразитные магнитные поля.
Электромобили следующего поколения могут иметь несколько сотен ампер, передаваемых от батарей до тягового двигателя. Кроме того, в большинстве автомобилей имеется более трех бесщеточных двигателей постоянного тока (BLDC) для перемещения автомобиля, электронный усилитель рулевого управления и двигатель вспомогательного торможения. Все эти системы генерируют паразитные магнитные поля.
Кроме того, в большинстве автомобилей имеется более трех бесщеточных двигателей постоянного тока (BLDC) для перемещения автомобиля, электронный усилитель рулевого управления и двигатель вспомогательного торможения. Все эти системы генерируют паразитные магнитные поля.
В связи с быстрым ростом этих паразитных магнитных полей, новые спецификации требуют дополнительных испытаний на устойчивость к более высоким магнитным полям. В автомобильной промышленности автомобильная электроника теперь подвергается воздействию поля постоянного тока напряжением 4 мТл (миллитесла) во время аттестации на электромагнитную совместимость (ЭМС) и ложных показаний любого из критически важных для безопасности датчиков — усилителя руля, педали акселератора, положения тягового ротора. — не может произойти.
Прелесть индуктивного определения положения в том, что оно невосприимчиво к этим шумам, поскольку оно активно фильтрует только ту частоту, которая необходима для определения. Поскольку в индуктивных датчиках положения не используется магнитный материал, они не воспринимают постоянное магнитное поле. Другими словами, закон Фарадея равен нулю для статического магнитного поля.
Другими словами, закон Фарадея равен нулю для статического магнитного поля.
Кроме того, описанный выше синхронный демодулятор будет отфильтровывать другие частоты выше и ниже основной частоты возбуждения, почти так же, как вы можете выбрать одну радиостанцию AM, когда антенна принимает полный диапазон AM.Такой же тип подавления невозможен с датчиками Холла и магниторезистивными датчиками.
5. Индуктивное определение положения — новая технология.
Индуктивные датчики положения используют печатную плату в качестве датчика и кусок металла в качестве мишени. Хотя это может быть новый способ реализации зондирования, технология хорошо зарекомендовала себя. Линейный дифференциальный трансформатор напряжения (LVDT) очень близок к индуктивному определению положения. LVDT будет использовать первичную обмотку и две вторичные обмотки для определения положения металлического вала в роботизированных приложениях (рис.4) .
4. Линейный дифференциальный трансформатор напряжения (LVDT) очень близок к индуктивному определению положения. Он может использовать обмотки двигателя для обнаружения изменений. Мишень ротора может использоваться вместе с датчиком на печатной плате.
Линейный дифференциальный трансформатор напряжения (LVDT) очень близок к индуктивному определению положения. Он может использовать обмотки двигателя для обнаружения изменений. Мишень ротора может использоваться вместе с датчиком на печатной плате.
Индуктивные датчики положения используют те же методы, чтобы уменьшить количество обмоток до размера печатной платы. Магнитные резольверы, вращающаяся версия LVDT, также используют аналогичные методы. И снова, вместо металлической конструкции, похожей на трансформатор, индуктивные датчики положения выполняют ту же функцию, которая может быть достигнута с помощью следов на печатной плате.Для определения положения LVDT, резольвер и индуктивные датчики принимают соотношение двух напряжений, вызванное возмущением магнитного поля проводящим элементом.
6. Для резервных индуктивных датчиков требуется вдвое больше места.
Критически важные автомобильные и промышленные приложения часто нуждаются в резервировании для обеспечения высочайшего уровня безопасности. Благодаря оптимизации слоев печатной платы и использованию некоторых интеллектуальных методов первичной обмотки двойной датчик не требует двойного пространства на печатной плате.Вместо этого оба датчика могут находиться в одном месте печатной платы (рис. 5) . В этом случае они используют одно и то же магнитное поле, слабо связанное магнитным полем, и все же обеспечивают гальваническую развязку. Вторичные компоненты могут подключаться к двум микросхемам, которые затем выводят независимые и резервные позиции, повышая безопасность приложения.
Благодаря оптимизации слоев печатной платы и использованию некоторых интеллектуальных методов первичной обмотки двойной датчик не требует двойного пространства на печатной плате.Вместо этого оба датчика могут находиться в одном месте печатной платы (рис. 5) . В этом случае они используют одно и то же магнитное поле, слабо связанное магнитным полем, и все же обеспечивают гальваническую развязку. Вторичные компоненты могут подключаться к двум микросхемам, которые затем выводят независимые и резервные позиции, повышая безопасность приложения.
5. Датчики резервирования могут совместно использовать устройство обнаружения цели, тем самым уменьшая общий размер резервированной системы.
7.Индуктивные датчики положения могут выполнять только небольшие линейные измерения.
Индуктивные датчики положения могут измерять линейные положения различной длины. Наилучшая точность достигается, когда длина датчика близка к приблизительному желаемому диапазону измерения, так что выходное разрешение можно масштабировать на кратчайшее расстояние. Эта длина датчика может варьироваться от 5 мм до 600 мм и более для практических применений. Любые ограничения по длине связаны со способностью генератора генерировать правильный LC-резонансный сигнал.Во всех случаях принцип работы один и тот же: создается магнитное поле и обнаруживаются помехи. Линейные измерения являются несомненным преимуществом этой технологии, а чувствительность может быть достигнута с помощью единого принципа измерения во многих практических диапазонах измерения.
Эта длина датчика может варьироваться от 5 мм до 600 мм и более для практических применений. Любые ограничения по длине связаны со способностью генератора генерировать правильный LC-резонансный сигнал.Во всех случаях принцип работы один и тот же: создается магнитное поле и обнаруживаются помехи. Линейные измерения являются несомненным преимуществом этой технологии, а чувствительность может быть достигнута с помощью единого принципа измерения во многих практических диапазонах измерения.
В качестве альтернативы, датчик на эффекте Холла может потребовать мультиплексирования нескольких датчиков на эффекте Холла, когда магнит перемещается из одного места в другое. Работа с кроссовером при таком мультиплексировании сложна и может зависеть от температуры.Индуктивный датчик не страдает этой проблемой и может выдавать линейные измерения, которые соответствуют требованиям приложения.
8. Индуктивные датчики положения могут измерять только линейные измерения.
Хотя линейное измерение является несомненным преимуществом этого метода, индуктивные датчики положения также могут измерять траектории вращающихся и считывающих дугу цели с теми же преимуществами более высокой точности и лучшей помехозащищенности. Автомобильные педали, воздушные клапаны, водяные клапаны и положение ротора — все это примеры датчиков, которые могут использовать индуктивную технологию.
Автомобильные педали, воздушные клапаны, водяные клапаны и положение ротора — все это примеры датчиков, которые могут использовать индуктивную технологию.
Думайте о вращающемся на 360 градусов датчике как о линейном датчике, концы которого изогнуты, чтобы встретиться с другим. Оказывается, поворотные индукционные датчики положения являются наиболее точными датчиками, потому что генерируемое магнитное поле может быть очень однородным на любом радиусе. С помощью этой технологии возможны линейные, дуговые и угловые измерения.
9. Материал мишени должен быть магнитным.
Индуктивный датчик положения обнаруживает изменение магнитного поля, и это магнитное поле нарушается металлической мишенью, но магнитный материал не требуется.Все, что проводит ток, позволяя течь наведенному вихревому току, будет вызывать это возмущение (рис. 6) . Магнитные материалы, такие как железо, являются проводящими, поэтому их также можно использовать. Однако целевой металл будет иметь лучшее расстояние обнаружения и более низкий ток питания, если он сделан из хорошего проводника, такого как медь, алюминий или сталь.
6. В металлической конструкции могут возникать вихревые токи.
10. Индуктивные датчики положения необходимо запрограммировать на превышение входной мощности.
В автомобиле многие сенсорные приложения находятся в модулях, которые подключены к блокам управления двигателем с помощью набора проводов. Для датчика это обычно состоит из линии питания, линии заземления и выходного контакта. Возможность калибровки модуля через вывод питания гарантирует, что никаких дополнительных подключений к печатной плате датчика не требуется, что снижает затраты и снижает затраты на сборку.
Однако для некоторых приложений требуется микроконтроллер. Именно здесь встроенные приложения хотели бы запрограммировать датчик с помощью другого микроконтроллера, а не специальной тестовой системы.Microchip LX3302A имеет эту функцию и возможность, позволяя программировать его через контакты GPIO.
11. Вы сами по себе с дизайном .
Не так давно для получения хороших результатов требовалось глубокое знание магнитных полей и доступ к высокопроизводительному набору моделирования методом конечных элементов или множество проб и ошибок. Сегодня поставщики ИС предоставляют эту услугу своим клиентам, предлагая оценочные платы и комплекты, позволяющие перейти от концепции к моделированию трассировки печатной платы.Некоторые поставщики даже предоставят результаты моделирования, оценивающие ошибку, которую вы будете иметь с датчиком, до тестирования печатной платы. Microchip предлагает эту помощь, чтобы помочь с дизайном ваших печатных плат.
Эти 11 мифов показывают, как индуктивные датчики положения сравниваются с датчиками на эффекте Холла и магниторезистивными датчиками, демонстрируя точность, устойчивость к паразитным магнитным помехам и экономичность. Готовы ли вы опробовать эту технологию в своем следующем продукте для определения положения ИИ?
Марк Смит, Ph.Д., менеджер по маркетингу продуктовой линейки в подразделении смешанных и линейных сигналов в Microchip Technology.
Индуктивные датчики положения | Renesas
Бесконтактные датчики положения Renesas не содержат магнитов, что значительно снижает затраты на материалы и обеспечивает устойчивость к магнитным полям рассеяния — обязательное требование для многих приложений. Индуктивные датчики положения взаимодействуют с недорогими катушками на основе печатных плат и простыми металлическими целями, обеспечивая гибкость однокристальной конструкции для датчиков вращения на оси (конец вала) и вне оси (боковой вал или сквозной вал), а также датчики линейного и дугового положения; от малых углов до полного считывания абсолютных углов на 360 °.Конструкция многосекторных поворотных датчиков обеспечивает значительное повышение точности датчиков для небольших угловых измерений или датчиков с большим количеством пар полюсов. Эти устройства идеально подходят для использования в широком спектре приложений коммутации двигателей на промышленных, медицинских и потребительских рынках.
Преимущества решения для бесконтактного датчика положения Renesas
Датчики положения
Renesas обладают рядом преимуществ по сравнению с традиционными резольверами, датчиками Холла и датчиками xMR. Вот некоторые из наиболее важных преимуществ:
Вот некоторые из наиболее важных преимуществ:
- Магниты не требуются; снижает стоимость системы
- Возможности проходного вала
- Гибкий для двигателей
- Поддерживает более высокую скорость
- Высокая точность во всех приложениях
- Меньший вес, меньший размер
- Устойчивость к рассеянному полю
- Допуск механического перекоса
- Одна интегральная схема для осевых и внеосевых датчиков
- Полное разрешение для любого диапазона углов
О бесконтактных (бесконтактных) индуктивных датчиках положения ИС
По своей основной функции датчик положения — это любое устройство, которое предоставляет данные измерения на основе положения движущегося объекта.Традиционные решения на основе магнита измеряют угловое положение, используя изменения амплитуды магнитного поля, вызванные смещением или вращением движущегося магнита. Однако эти решения дороги и предлагают ограниченную точность для небольших угловых перемещений и / или двигателей с большим количеством пар полюсов. ИС бесконтактного безмагнитного индуктивного датчика положения Renesas взаимодействуют с тонкими катушками на печатной плате и металлической мишенью для определения положения и передачи точных данных о положении обратно в систему.Эти индуктивные бесконтактные решения предлагают значительные преимущества по стоимости, диапазону температур, надежности, гибкости конструкции и устойчивости к магнитным полям рассеяния.
ИС бесконтактного безмагнитного индуктивного датчика положения Renesas взаимодействуют с тонкими катушками на печатной плате и металлической мишенью для определения положения и передачи точных данных о положении обратно в систему.Эти индуктивные бесконтактные решения предлагают значительные преимущества по стоимости, диапазону температур, надежности, гибкости конструкции и устойчивости к магнитным полям рассеяния.
Поворотные индуктивные датчики положения
Для инженеров, которым требуется точное и надежное измерение углового положения. Индуктивные датчики положения CambridgeIC представляют собой хорошую альтернативу решениям на основе эффекта Холла или оптическому энкодеру, позволяя измерять абсолютное поворотное положение для сложных приложений со сложной конструкцией изделий.
Надежное, точное, индуктивное определение положения
Основанные на инновационной технологии резонансного индуктивного определения положения, датчики положения CambridgeIC используют конструкции, встроенные в обычные печатные платы для измерения положения вращения. Это дает точный датчик с низкими затратами на интеграцию, стабильный во времени и чрезвычайно надежный. Разработчики могут обеспечить абсолютное линейное, угловое и угловое измерение положения с высокой надежностью в самых сложных приложениях.
Это дает точный датчик с низкими затратами на интеграцию, стабильный во времени и чрезвычайно надежный. Разработчики могут обеспечить абсолютное линейное, угловое и угловое измерение положения с высокой надежностью в самых сложных приложениях.
Определение положения для крутых углов
Насколько сложно? По сравнению с оптическими энкодерами или датчиками Холла это решение очень устойчиво к грязи, пыли, влаге, вибрации и ударам, перекосам и большим измерительным зазорам. Это особенно эффективно с точки зрения затрат, когда пространство ограничено или системе необходимо определять положение по многим осям.
Это делает датчики линейного положения CambridgeIC подходящими для многих приложений, включая линейные приводы и поплавковые датчики уровня.
Не только ротационное измерение
Конструкции
доступны для огромного диапазона геометрических форм — измерение положения дуги, измерение положения вращения и определение линейного положения, а также поддержка для разработки специальных датчиков.
Работа с датчиками положения CambridgeIC проста — чертежи датчиков доступны в формате Gerber для интеграции с печатными платами клиентов. Эти конструкции работают с микросхемами центрального блока слежения (CTU) CambridgeIC, обеспечивая непрерывный расчет целевой позиции.Для оценки или мелкосерийного производства также доступны сенсорные блоки в сборе.
Заинтересованы? Чтобы узнать больше, скачайте техническое описание или Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
Датчики положения (Выбор правильного датчика)
Инкрементальный датчик
Предоставляет только информацию об изменении положения, поэтому фактическое положение неизвестно при запуске. Сигнал индекса / маркера один раз на оборот определяет нулевую позицию или ноль устройства.Он обнаруживается во время процедуры самонаведения. Для коммутации бесщеточного двигателя двигатель обычно имеет три магнитных датчика Холла, которые обеспечивают грубую информацию об абсолютном положении для предварительного выравнивания магнитных полей. Дополнительные датчики обычно небольшие, точные и экономичные.
Дополнительные датчики обычно небольшие, точные и экономичные.
Датчик абсолютного давления
Обеспечивает фактическое физическое положение в пределах одного оборота или в пределах диапазона линейного перемещения. Для двигателя не требуются холлы, а для поворотных приложений требуется перемещение в исходное положение только в том случае, если диапазон движения превышает один оборот.Датчики обычно больше и дороже, чем дополнительные устройства.
Multi-Turn
Поворотные устройства, датчик обеспечивает фактическое положение за несколько оборотов. Самонаведение можно полностью исключить. Многооборотные устройства имеют внутреннее зацепление и являются наиболее громоздким и дорогим решением.
Разрешение
Определяет наименьшее приращение позиции, которое может быть перемещено или измерено, и обычно выражается в «счетах». Высокое разрешение требуется для высокопроизводительных сервосистем.Система позиционирования «дизеринг» между двумя отсчетами, поэтому чем выше разрешение, тем меньше дизеринг. Разрешение также оказывает значительное влияние на колебания скорости на низкой скорости. Поскольку скорость получается из обратной связи по положению, при низком разрешении в образце может быть недостаточно данных для точного определения скорости. На высоких скоростях устройства с высоким разрешением могут генерировать данные со скоростью, превышающей возможности отслеживания контроллера или сервопривода.
Разрешение также оказывает значительное влияние на колебания скорости на низкой скорости. Поскольку скорость получается из обратной связи по положению, при низком разрешении в образце может быть недостаточно данных для точного определения скорости. На высоких скоростях устройства с высоким разрешением могут генерировать данные со скоростью, превышающей возможности отслеживания контроллера или сервопривода.
Интерполяция
Как будет видно, многие датчики генерируют синусоидальные и косинусоидальные сигналы.Период этих сигналов определяется присущей устройству «высотой звука». Имея информацию о sin / cos, теоретически возможно получить бесконечное разрешение, вычислив отношение сигналов. Этот метод известен как интерполяция. На практике точность сигналов sin / cos и отношение сигнал / шум ограничивают достижимое разрешение.
Точность
Определяет, насколько близко каждое измеренное положение находится к фактическому физическому положению. Точность — это во многом проблема системы, и в ней могут преобладать механические ошибки, такие как эксцентриситет, прямолинейность и плоскостность.Ошибки датчика включают в себя ненакопление случайных изменений высоты тона (линейность), накопление ошибок основного тона (наклон) и вариации в точности внутренних сигналов sin / cos. Производители прецизионных машин обычно калибруют ошибки с помощью справочной таблицы смещений. Более подробную информацию можно найти в нашем техническом документе «Понимание разрешения, точности и повторяемости».
Точность — это во многом проблема системы, и в ней могут преобладать механические ошибки, такие как эксцентриситет, прямолинейность и плоскостность.Ошибки датчика включают в себя ненакопление случайных изменений высоты тона (линейность), накопление ошибок основного тона (наклон) и вариации в точности внутренних сигналов sin / cos. Производители прецизионных машин обычно калибруют ошибки с помощью справочной таблицы смещений. Более подробную информацию можно найти в нашем техническом документе «Понимание разрешения, точности и повторяемости».
Повторяемость
Определяет диапазон измеренных положений, когда система несколько раз возвращается в одно и то же физическое положение.Повторяемость может быть важнее абсолютной точности. Для эффективной калибровки неточностей системы важно, чтобы показания каждого положения были последовательными. Гистерезис датчика (разные показания в зависимости от направления приближения к позиции измерения) является важным фактором повторяемости.
Modular
Наиболее распространенная форма поворотного устройства обратной связи упаковывается в корпус с внутренними подшипниками и валом для соединения с двигателем через гибкую муфту.Корпуса доступны с различными степенями герметичности и имеют большой размер. Модульные устройства не имеют корпуса или подшипников и должны быть встроены в механическую систему. Они значительно компактнее, но в зависимости от технологии могут потребоваться более щадящие условия.
Ось включения / выключения
Для поворотных приложений датчик обычно располагается вне оси на окружности шкалы, которая наматывается вокруг оси вращения. В некоторых реализациях датчик позиционируется на оси, минимизируя размер, когда радиальное пространство ограничено.
ASIC индуктивного датчика положения
- Петр Каменицкий
- Павел Горский
Глава
1
Цитаты- 2,6 км
Загрузки
Описаны принцип и реализация ASIC для быстрого, точного и высокоразрешающего бесконтактного индуктивного датчика положения (CIPOS).
Индуктивный бесконтактный датчик подходит для измерения углового или линейного положения. Преимущество используемого принципа измерения состоит в том, что это строго относительная метрика, независимая от абсолютных значений. Механическая прочность, нечувствительность к колебаниям температуры, электрическим или магнитным полям, а также его механические допуски делают датчик идеальным для суровых автомобильных условий. Датчик соответствует всем требованиям для приложений, связанных с безопасностью. Представленная ASIC включает в себя датчик возбуждения, точную аналоговую и цифровую обработку входного сигнала, а также передатчик выходного сигнала.Описывается путь прохождения сигнала и основные блоки.
Ключевые слова
Автоматическая регулировка усиления Положение ротора Резервная система Стадия усиления Коэффициент подавления синфазного сигнала
Эти ключевые слова были добавлены машиной, а не авторами. Этот процесс является экспериментальным, и ключевые слова могут обновляться по мере улучшения алгоритма обучения.
Это предварительный просмотр содержимого подписки,
войдите в
, чтобы проверить доступ.
Предварительный просмотр
Невозможно отобразить предварительный просмотр.Скачать превью PDF.
Информация об авторских правах
© Springer Science + Business Media B.V 2008
Авторы и аффилированные лица
- Петр Каменицкий
- Павел Хорски
- 1.AMI SemiconductorCzech Republic
Индуктивные датчики | Индуктивные датчики
| Товар | ||||||
|---|---|---|---|---|---|---|
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||




4B была разработана для определения скорости вала, положения вала, положения ворот или присутствия объекта.
| |||||
доля | |||||
Whirligig® | |||||
• Полностью защищенная мишень для легкой установки датчиков | Одобрения: | ||||
• Универсальное применение — подходит для всех стилей DIN и отраслевых стандартов | |||||
Цилиндрические датчики | |||||
• Простая установка — требуется только резьбовое отверстие 1/2 дюйма UNC в | |||||
Механический вал или используйте Mag-Con ™ для магнитного соединения | |||||
• Доступен с 1, 2, 4 или 8 целями | |||||
| Подробнее о продукте | |||||
P100 Proxswitch — 18 мм | |||||
• Определяет скорость вала, положение вала / ворот или присутствие объекта | Одобрения: | ||||
• Без контроля контактов | |||||
• Полностью герметичная конструкция (погружная) | |||||
• Дальность обнаружения 5/16 дюйма (8 мм) — железная цель | |||||
• Простая установка с держателем датчика Whirligig® | |||||
| Подробнее о продукте | |||||
P300 Proxswitch — 30 мм | |||||
• Определяет скорость вала, положение вала / ворот или присутствие объекта | Одобрения: | ||||
• Без контроля контактов | |||||
• Полностью герметичная конструкция (погружная) | |||||
• Дальность обнаружения 11/32 дюйма (9 мм) — железная цель | |||||
• Светодиодная индикация состояния для обнаружения цели | |||||
• Простая установка с держателем датчика Whirligig® | |||||
| Подробнее о продукте | |||||
P800 Proxswitch — стиль DIN | |||||
| • Определяет скорость вала, положение вала / ворот или присутствие объекта | Одобрения: | ||||
| • Полностью герметичная конструкция (погружная) | |||||
• Дальность обнаружения 1/2 дюйма (12 мм) — железная цель | |||||
• Светодиодная индикация состояния для обнаружения цели | |||||
| • Встроенный ввод для кабелепровода 1/2 «NPT | |||||
| • Простая установка с держателем датчика Whirligig® | |||||
| Подробнее о продукте | |||||
 Датчики приближения могут быть подключены к ПЛК или к одной из систем мониторинга опасностей 4B для подачи сигнала тревоги и / или отключения вашего оборудования при обнаружении условий отключения.
Датчики приближения могут быть подключены к ПЛК или к одной из систем мониторинга опасностей 4B для подачи сигнала тревоги и / или отключения вашего оборудования при обнаружении условий отключения..