Источник тока для гальваники. Часть II - еще одна теория. Источник питания для гальваники
Источник тока для гальваники. Часть I
Часть 1Часть 2Часть 3Часть 4Прошло много времени после моей последней публикации на эту тему. Исходные подходы к решению этой задачи претерпели заметные изменения, я перерыл огромное количество информации и сжег десятки (буквально) прототипов в процессе отладки и доводки. Все оказалось отнюдь не так просто, как казалось в самом начале (и не только в самом начале), да и обстоятельства не способствовали быстрому завершению процесса. Тем не менее силовая часть, наконец-то, получилась такой, как я хотел — со встроенной стабилизацией и уходом вниз по частоте под нагрузкой, так что, я надеюсь, есть смысл описывать то, что получилось. В процессе работы над проектом накопилось изрядное количество полезной информации, которую я тоже постараюсь изложить. В связи с этим осторожно, многабукаф.
Формулируем задачу
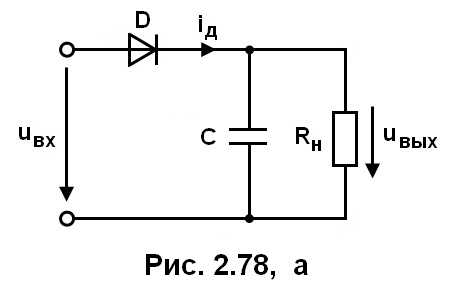
Один из самых важных этапов в изготовлении плат с металлизацией — осаждение меди в отверстиях. Вариантов активации перед осаждением существует много, от графита и классического палладиевого активатора, до гипофосфитного способа и экзотики в виде проводящих полимеров. Но после активации следует общий для всех методов процесс, а именно электрохимическое (гальваническое) осаждение меди. Этот процесс в самом общем виде описывается законами Фарадея. Если к этим законам добавить определение силы электрического тока (а именно, что ток это заряд протекающий в цепи за единицу времени) не трудно догадаться, что для осаждения понадобится пропускать фиксированный ток в течении определенного времени. Поскольку законы Фарадея определяют массу вещества, а нам нужно получить медь определенной толщины, то с этой точки зрения удобнее оперировать не током, а плотностью тока (то есть током на единицу площади поверхности платы). Но если покопаться в деталях, то окажется, что плотностью тока фактически задается режим работы гальванической ванны в целом, так что практически везде в описании гальванических процессов в качестве одного из основных параметров используется именно плотность тока. Но, естественно, при осаждении меди на заготовку мы имеем дело с конкретными размерами заготовки и для фиксации режима необходимо фиксировать ток.Из написанного выше непосредственно следует, что напряжение между катодом и анодом в гальванической ванне нас интересует мало, оно получается «автоматически» в конкретной гальванической ванне с конкретной заготовкой и электролитом в процессе задания необходимой плотности тока. Тем не менее, это напряжение существенно влияет на выбор подходов к реализации источника питания для гальваники. На практике (по крайней мере в любительских условиях) напряжение на ванне редко превышает несколько вольт (по собранной мной информации в типичных режимах менее 2В). На это напряжение существенно влияет как форма и размер ванны и электродов так и состав электролита. Последний пункт имеет смысл рассмотреть подробнее. Основное требование для осаждаемого слоя меди — равномерность по всей поверхности, в первую очередь в отверстиях. Этого не так просто достичь как может показаться. Основных проблем две — отверстия искажают форму электического поля в электролите (а именно это поле и есть то, что двигает ионы меди в электролите и восстанавливает ионы меди до металла, формируя таким образом осаждаемый слой). На участках где поле сильнее (как правило это края заготовки и отверстий) напряженность поля выше и процесс идет быстрее, что, в свою очередь, приводит к еще большему искажению поля и еще большему ускорению осаждения меди. Иначе говоря, процесс разбалансируется. Как не сложно заметить, внутренние части отверстий из-за этого эффекта оказываются в невыгодном положении и меди туда садится меньше, чем на поверхность. На проявление этого эффекта сильно влияет так называемая рассеивающая способность электролита (в англоязычной литературе используется термин «throwing power»). Чем выше рассеивающая способность, тем менее выражено влияние неравномерности электрического поля и равномернее покрытие. Вторая проблема — в слое электролита непосредственно прилегающему к поверхности заготовки ионы меди восстанавливаются до металла и оседают на заготовке (катоде), а это приводит к локальному обеднению слоя электролита ионами меди. Это решается перемешиванием электролита (целая отдельная большая тема), но и в этом случае отверстия оказываются в невыгодном положении. По большому счету все оптимизации процесса осаждения меди направлены на борьбу с этими двумя явлениями. Одно из направлений — использование тока различной силы и направления (чуть-чуть подробнее об этом чуть ниже).
Для металлизации плат используются почти исключительно сернокислые электролиты меднения. В их состав входит три основных компонента — вода, серная кислота и сернокислая медь (купорос) (другие компоненты могут быть, могут отсутствовать, но три названых присутствуют всегда). Существуют два основных подхода к выбору соотношения основных компонентов — (условно) «много меди и мало кислоты» и «много кислоты и мало меди». Первый тип электролитов из-за высокого содержания ионов меди в растворе менее подвержен локальному истощению в процессе осаждения. Второй тип, соответственно, наоборот. Но тут есть одна засада — рассеивающая способность электролитов с высоким содержанием меди значительно ниже, чем у электролитов с высоким содержанием кислоты. Более того, рассеивающая способность быстро растет по мере повышения концентрации кислоты и понижению концентрации ионов меди. В промышленности последнее время наметился переход от электролитов с высоким содержанием меди к электролитам с высоким содержанием кислоты. Причина проста — по мере уменьшения диаметра переходных отверстий становится все сложнее получать стабильную металлизацию с использованием электролитов имеющих низкую рассеивающей способностью. Ну а для борьбы с локальным истощением электролита применяются разнообразные способы перемешивания и (опять-таки) ток различной силы и направления.
Исследования, как их иногда называют, нестационарных режимов осаждения ведутся давно, но, насколько я понял, во всех деталях, что в это время происходит в электролите, никто не знает. Тем не менее, уже имеющиеся результаты активно используются в промышленности. Причина проста — в определенных сочетаниях условий (состав электролита + форма тока) качество покрытия значительно улучшается — увеличивается пластичность, падает удельное сопротивление, улучшается структура (что влияет, например, на стойкойсть к термоциклированию). Но главное, в некоторых ситуациях удается контролировать рост слоя меди на поверхности и внутри отверстий добиваясь не просто выравнивания скорости роста, но даже превышение скорости роста слоя меди внутри отверстий над скоростью роста на поверхности (где уже есть фольга и лишняя медь не нужна). Мне попадались публикации, в которых авторы утверждают, что им удалось добиться практически нулевого роста на поверхности и полного заполнения медью в отверстиях. Никакие другие способы (скажем, добавки в электролит) не позволяют получать ничего подобного даже близко. Еще одно интересное направление — использование реверсивных импульсных токов для получения высококачественных покрытий без применения блескообразователей, на чистом базовом электролите (купорос + серная кислота + незначительное количество ионов хлора). Значительных успехов в этом добилась фирма Faraday Technology (тем, кого не пугает английский, настоятельно рекомендую почитать патенты полученные этой компанией на технологии осаждения, ссылки есть на странице The Technology). С любительской колокольни это интересно по двум причинам: блескообразователи есть далеко не всегда и не везде. Но даже если достать их не проблема, блескообразователи сильно усложняют процесс обслуживания гальваники, требуя периодической чистки от органики, регулярного контроля и коррекции электролита. Их отсутствие, соответственно, позволяет этого всего избежать, что особенно существенно если гальваника используется не регулярно (а это обычная ситуация у любителей).
Итого еще два требования — стабильность работы с низкими напряжениями и возможность оперативно изменять силу и направление тока.
В целом, понятно, что нужно изменять силу и направление тока, осталось выяснить как часто и насколько сильно. На эту тему информации много, но она, в основном, общего характера, конкретные исследованные режимы описаны либо в публикациях к которым нет свободного доступа, либо стали основой для патентов (но в патентах готовых режимов тоже нет, вместо этого накрываются целые диапазоны режимов, чтобы максимально усложнить жизнь тем, кто попытается сделать что-то подобное самостоятельно). К счастью одна публикация таки нашлась. Из них следует, что минимальная длительность импульса тока — 1мс. Мне попадались публикации в которых упоминались более высокочастотные режимы (до 10кГц), но в отсутствие других подробностей воспользоваться подобными режимами будет сложно. Из законов Фарадея следует, что при использовании тока с изменяющимся направлением скорость осаждения будет пропорциональна разнице зарядов переносимых во время прямого и обратного импульсов. Это значит, что для сохранения скорости осаждения величина тока в течении прямого импульса должна быть больше, чем на постоянном токе, чтобы компенсировать заряд перенесенный во время обратного импульса (в итоге средний ток остается таким же как и для постоянного тока). Из упомянутой выше публикации так же следует, что в некоторых режимах обратный ток может в разы (до 4-х раз) превышать прямой. Итого имеем следующие требования: минимальная длительность импульса тока должна быть 1мс, источник должен иметь запас по выходному току в несколько раз выше необходимого для режимов постоянного тока. Поскольку ВАХ гальванической ванны мало отличается от линейной (по крайней мере из тех данных, что у меня есть), в импульсных режимах понадобятся пропорционально большие выходные напряжения.
Несколько слов о самих режимах осаждения. Режимы осаждения при использовании промышленных блескообразователей определяются производителем блескообразователя. Для разных блескообразователей эти режимы несколько отличаются, но как правило лежат в диапазоне 2-4А/дм2. Замечу, что практически всегда указывается и нижняя граница плотности тока. Причина проста — блескообразователь для нормальной работы требует, что бы напряженность поля была не меньше некоторой величины. Без блескообразователя плотности тока обычно не превышают 1-1.5А/дм2. Итого получается 1-4А/дм2. Типичная «любительская» заготовка размером 100х160мм имеет площадь 3.2дм2 (не забываем, что учитывается вся площадь заготовки, а это две стороны). Из этого не сложно посчитать, что для постоянного тока понадобится до 12-13А, а для некоторых реверсных режимов может понадобиться до 60А в импульсе даже на такой небольшой заготовке.
Еще один существенный момент: сразу после активации (и в некоторых случаях химмеднения) проводящий слой на поверхности отверстий достаточно тонкий и в процессе погружения заготовки в электролит (в котором изрядно серной кислоты) его можно легко повредить. Чтобы этого избежать применяется так называемая загрузка под током, то есть напряжение на заготовку подается до того, как она опускается в гальваническую ванну. Для этого режима нельзя применять стабилизацию тока, поскольку пока заготовка не погружена в электролит полностью плотность тока может многократно превысить рабочие величины и покрытие получится с дефектами и/или плохой адгезией. В этом случае нужен режим стабилизации напряжения, который позволит наращивать ток пропорционально площади заготовки находящейся в электролите. Замечу, что нет необходимости поддерживать именно рабочий ток. Достаточно небольшого смещения потенциалов, чтобы остановить реакцию проводящего слоя и электролита. Итого имеем еще одно требование — возможность работы в режиме стабилизации напряжения, причем напряжения очень низкого (десятки-сотни милливольт).
Итого:
Собирая в кучу все вместе получаем следующий набор требований к источнику тока для любительских целей:- — стабилизация тока
- — стабилизация напряжения
- — реверс
- — выходные напряжения от 2В и выше
- — выходные токи от 15А и выше
- — минимальная длительность импульса не больше 1мс
we.easyelectronics.ru
Выпрямители для гальваники
 Если Вы решили заняться электрохимической металлизацией, то первое, о чем нужно подумать - это выбор оборудования. На российском рынке гальваническое источники марки СТРАТ являются единственными выпрямителями, которые поставлены в серийное производство. Источники тока СТРАТ производятся в Санкт-Петербурге уже более 10 лет и зарекомендовали себя в разных уголках России как надежное и качественное оборудование для гальваники.
Если Вы решили заняться электрохимической металлизацией, то первое, о чем нужно подумать - это выбор оборудования. На российском рынке гальваническое источники марки СТРАТ являются единственными выпрямителями, которые поставлены в серийное производство. Источники тока СТРАТ производятся в Санкт-Петербурге уже более 10 лет и зарекомендовали себя в разных уголках России как надежное и качественное оборудование для гальваники.
Перейти в каталог>>
Заказать обратный звонок>>
Технология
Силовая часть источников для гальваноосаждения состоит из высококачественных высоковольтных IGBT транзисторов, что уменьшает вес и повышает КПД инверторов до 90%. Такой высокий показатель коэффициента полезного действия существенно уменьшает энергопотребление и токовую нагрузку на сеть питания.
 Все источники для гальваники СТРАТ могут быть использованы в различных технологических процессах металлоосаждения и гарантируют высокую точность и стабильность выходных характеристик. В аппаратах предусмотрена защита от короткого замыкания, перегрева и перегрузки. Все внутренние элементы хорошо закреплены и защищены прочным металлическим корпусом. На фронтальной панели расположены: экран цифровой индикации выходного параметра, ручка для регулировки и кабельные розетки.
Все источники для гальваники СТРАТ могут быть использованы в различных технологических процессах металлоосаждения и гарантируют высокую точность и стабильность выходных характеристик. В аппаратах предусмотрена защита от короткого замыкания, перегрева и перегрузки. Все внутренние элементы хорошо закреплены и защищены прочным металлическим корпусом. На фронтальной панели расположены: экран цифровой индикации выходного параметра, ручка для регулировки и кабельные розетки.
Особенности выпрямителей для гальваники
При выборе гальванического источника обратите особое внимание на погрешности входных и выходных характеристик. Правильный выпрямитель для гальваники не должен быть чувствителен к колебаниям напряжения в сети питания и иметь стабильные характеристики на выходе. При этом данные свойства должны сохраняться и под нагрузкой. Таким образом, НЕчувствительность к колебаниям в сети питания должна быть больше 5 %, а погрешность выходных токов и напряжений при этом менее 1 %.
Все выпрямители для гальваники СТРАТ перекрывают описанные свойства и гарантируют стабильный ток или напряжение с погрешностью менее 1% при колебаниях в сети питания +/- 10%. Каждый аппарат перед отгрузкой обязательно проходит тестирование всех заявленных характеристик на соответствие. Таким образом, приобретая оборудование СТРАТ Вы можете быть уверены, что осаждаемое металлопокрытие будет произведено с полным соблюдением всех технологических особенностей процесса.
Не столь существенная, но тоже важная характеристика выпрямителей для гальваники - это габариты и вес. Самый легкий источник тока СТРАТ весит 12 кг, самый тяжелый 55 кг, при этом все модели оснащены ремнем или ручкой для удобной переноски и имеют малые габариты.
Модельный ряд выпрямителей для гальваники

Источники для гальваники марки СТРАТ представлены в широком ассортименте и позволяют собрать нужный аппарат "как конструктор" и не переплачивать за ненужные Вам функции. Так, например, если Вам нужен источник стабилизации только тока до 200 Ампер и возможность подключения блока реверса, то можно не переплачивать за возможность стабилизации напряжения и возможность подключения пульта дистанционного управления.
И наоборот, если Вам нужен источник на 2000А, полный функционал и модуль для программирования режимов автономной работы, то нам есть, что Вам предложить. В общей сложности производственная линейка гальванических источников состоит из более чем 50-ти конфигураций.
Для подбора необходимой модели выпрямителя для гальваники и дополнительных модулей Вы можете воспользоваться следующей схемой и выбрать необходимые параметры:

Режим стабилизации:
Диапазон регулировки тока - 15 вариантов в общем интервале 1-2000 Ампер
Питание 220 Вольт:
- СТРАТ-30ВГ (1-30А)
- СТРАТ-50ВГ (1-50А)
- СТРАТ-100ВГ (1-100А)
- СТРАТ-150ВГ (1-150А)
- СТРАТ-200ВГ (1-200А)
- СТРАТ-300ВГ (1-300А)
Питание 380 Вольт:
- СТРАТ-3003ВГ (1-300А, 12 Вольт)
- СТРАТ-5003ВГ (1-500А, 12 Вольт)
- СТРАТ-10003ВГ6 (1-1000А, 6 Вольт)
- СТРАТ-10003ВГ12 (1-1000А, 12 Вольт)
- СТРАТ-10003ВГ18 (1-1000А, 18 Вольт)
- СТРАТ-15003ВГ6 (1-1500А, 6 Вольт)
- СТРАТ-15003ВГ12 (1-1500А, 12 Вольт)
- СТРАТ-15003ВГ18 (1-1500А, 18 Вольт)
- СТРАТ-20003ВГ6 (1-2000А, 6 Вольт)
- 2500 Ампер и более >>
- Возможна любая мощность путем соединения нескольких источников
Дополнительные возможности:
- Возможность подключения блока реверса
- Возможность подключения пульта ДУ
Дополнительное оборудование:
- Блоки реверса - 7 вариантов в общем интервале токов 1 - 1000 Ампер
- Пульт ДУ
xn--80a5acec.xn--p1ai
Источник тока для гальваники. Часть IV
Часть 1Часть 2Часть 3Часть 4Настало время сложить все в кучу и нарисовать схему и плату. Файлы в формате Eagle 6.4 в аттаче.
Файлы в формате Eagle 6.4 в аттаче.
Схема: Плата:
Плата: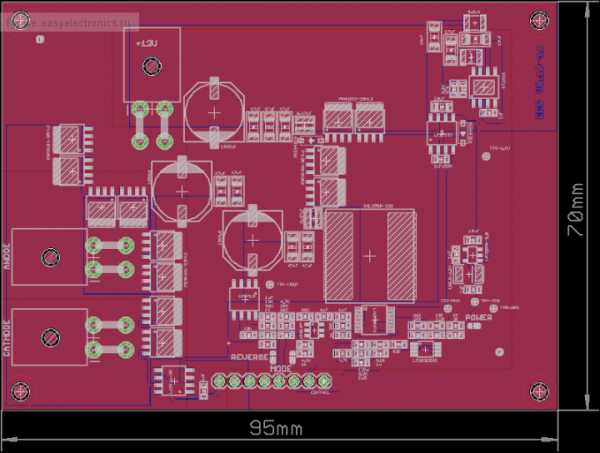
Схема и плата в значительно большем разрешении есть в аттаче.
Что получилось на выходе: — максимальный ток: 25А — максимальное напряжение на нагрузке — 7В — частоты преобразования: расчетные — 740/500/220 кГц, реальные ~660/500/240кГц. — пороговые токи 7А и 15А
Описание схемы
Функционально схема состоит из следующих частей: — Контроллер преобразователя — Силовой каскад — Схема выбора режима стабилизации и датчики — Схема управления частотой преобразования — Схема питания — РеверсВ качестве контроллера преобразователя используется LM2745. Это один из представителей довольно большого семейства чипов фирмы TI для синхронных преобразователей и под нашу задачу подошел по нескольким причинам — схема управления по напряжению, наличие трекинга, простое управление частотой преобразования, широкий диапазон рабочих частот, доступность и удобный но компактный корпус. Из особенностей включения можно отметить, разве что, «заглушенный» ограничитель тока (резистор с 7-й ножки на землю). Так же замечу, что схема управления по напряжению при таком варианте включения значительно удобнее схемы управления по току (и ее вариациям), поскольку контроллер генерирует нарастающий сигнал для ШИМ самостоятельно. Другой плюс для нашего случая — одна петля обратной связи, что упрощает компенсацию. С точки зрения традиционного применения усилитель ошибки несколько «перекомпенсирован» и полоса частот заужена. Это снижает быстродействие преобразователя, но повышает его устойчивость в широком диапазоне напряжений и токов.
Силовой каскад
Тут все традиционно — драйвер и полевики. Полевики установлены парами в оба плеча, но сами полевики разные. Сочетание типов полевиков и их количества оптимизировано под конкретную задачу, расчетные потери в транзисторах в любых режимах не превышают ~1.7Вт (причем максимум не на максимальном токе, а возле первой точки «перегиба» частоты).Схема выбора режима стабилизации и датчики
Датчик тока сделан на униполярном ACS713, а датчик напряжения — просто делитель напряжения на резисторах. Никаких особенностей нет. Выходные напряжения с обоих датчиков «загнаны» в диапазон «менее 3.3В», для нормальной работы внешнего контроллера. В качестве переключателя используется широко распространенный аналоговый мультиплексер/демультиплексер 74LVC1G3157. Особенностей, естественно, никаких нет. По умолчанию (то есть со снятыми управляющими напряжениями) схема работает в режиме стабилизации напряжения, при этом выходное напряжение составляет около 50мв. Это вызвано протеканием тока, который должен заряжать конденсатор мягкого старта, через резистор входного делителя управляющего напряжения. По идее этого напряжения должно хватать для работы в режиме «загрузка под током», но это надо проверять.Схема управления частотой преобразования
Изначально планировалось использовать одну «точку перегиба» и две частоты преобразования. Но потом на глаза попался компаратор LM393 (их там целое семейство LM393/339/2903/2901), который мне подходил из-за выхода с открытым коллектором. Поскольку в корпусе минимум два компаратора, то я решил этим воспользоваться и сделать две точки смены частоты. Одно из полезных последствий этого решения — путем выбора токов при которых меняется частота и самих частот удалось удержать необходимую для преобразователя индуктивность в пределах менее 1мкГн для всех сочетаний токов и выходных напряжений. Сама схема достаточно примитивная — выходное напряжение с датчика тока сравнивается с эталонным напряжением заданным делителем. Изначально (при нулевом токе на выходе) напряжения на делителе выше напряжения с датчика тока, поэтому оба компараторы имеют на выходе логический 0 (что выражается в открытых выходных транзисторах) и два из трех частотозадающих сопротивлений закорочены. Оставшееся сопротивление задает максимальную частоту работы преобразователя. Когда выходной ток растет и сигнал с датчика достигает первой «точки перегиба» нижний по схеме компаратор срабатывает (выходной транзистор закрывается) и подключает второй резистор в частотозадающую цепь. Это приводит к понижению частоты преобразования. Аналогичный процесс происходит и при достижении второй точки перегиба. Замечу, что схема управления частотой работает независимо от режима стабилизации и независимо от выходного напряжения.Схема питания
По идее достаточно было одного напряжения питания для всей схемы (+5В), но, как я уже писал раньше, питание драйвера имеет смысл несколько повысить. С другой стороны, питание управляющих цепей имеет смысл максимально качественно отфильтровать (а поскольку рядом гуляют большие импульсные токи, это вдвойне актуально). Так что в итоге сложилась двухступенчатая схема питания — сначала входное напряжение понижаем до 6.5В (точнее, до 6.4) и питаем драйвер, затем с помощью маломощного стабилизатора понижаем до 5В и питаем все остальное.Реверс
Для реверса использован мост, в качестве драйвера моста использована LM5111-3M. Этот вариант драйвера имеет один прямой и один инверсный вход, так что в итоге вся схема реверса получилась предельно простой. Поскольку для питания драйвера используется питание всей схемы, а встроенного генератора подкачки в драйвере нет, то способность драйвера открывать верхние транзисторы в мосте ограничена разницей между питающим напряжением всей схемы и выходным напряжением преобразователя. Для нормальной работы транзисторов нужно, как минимум 4-4.5В (пороговое напряжение ниже, но именно с таким напряжением на затворе транзистор выходит на нужное сопротивление канала), поэтому выходное напряжение ограничено этой отметкой. Это ограничение не играет сколько-нибудь заметной роли, просто все остальные части схемы это берут во внимание, скажем, выходной делитель посчитан так, что не позволяет в режиме стабилизации напряжения выдать напряжение выше ~7.5В.Замечания по разводке
Разводка оказалась едва ли не самой сложной частью проекта. Главных требований два — а) минимизировать (геометрически) пути прохождения больших пульсирующих токов и б) аккуратно разделить земли. На схеме нарисованы две земли — силовая и сигнальная, в реальности их четыре — силовая конфигурацией полигонов разделена на три — сильноточную и две слаботочные. В целом вся разводка как бы «обернута» вокруг центрального полигона силовой земли. Это позволило сократить пути больших токов до минимума вообще. Силовая «сильноточная» это весь центральный полигон. Первая слаботочная силовая земля, выведенная слева вверху, подводит питание ко всей слаботочной части и служит для связи драйвера с нижним транзистором. Вторая слаботочная силовая земля разведена справа и вниз, подводит питание к драйверу моста и служит для связи этого драйвера с нижними плечами моста. Блокировочные конденсаторы и конденсаторы выходного фильтра расположены максимально близко к источникам импульсных токов (транзисторам и индуктивности). Этому способствует и их форма/размер. Нижняя сторона платы содержит несколько полигонов, функциональной нагрузки, кроме отвода тепла, у большинства из них нет. Один из полигонов используется еще и для подвода питания к драйверу моста, так что или плата должна быть с металлизацией или разъем управления должен быть запаян с обеих сторон.Общие замечания и комплектующие
В качестве первых (ближайших к источникам пульсаций) конденсаторов использованы конденсаторы с реверсной геометрией 0612. Выбор не случаен — такое решение позволяет минимизировать паразитные индуктивности и максимально сократить пути прохождения токов с наиболее широкой полосой.Входной электролит обязателен (иначе неслабые пульсации потребляемого тока будут «лезть» обратно в блок питания и не факт, что он с ними справится, не говоря уже о том, что вся схема превратится в передатчик в широком диапазоне. Электролит следует подбирать с малым ESR и большими допустимыми токами пульсаций, иначе он будет сильно греться и быстро выйдет из строя. В идеале сюда лучше поставить полимерные конденсаторы, но подходящих конденсаторов в SMD исполнении я не нашел, а ставить выводные не захотел. Если будет возможность поставить полимерные, то подойдут даже с емкостью в несколько раз меньшей (220мкф должно хватить).
В качестве разъемов питания и выхода выбраны 4-х контактные разъемы типа MiniFit. Этот тип разъемов всем известен по компьютерным блокам питания. Разводка входа использована аналогичной одному из выходов ATX (если память не изменяет, то дополнительного питания процессора, но тут надо быть внимательным, 4-х контактных выходов обычно два и земля-питание у них разведены противоположным образом).
Разъем управления — обычный рядный разъем с шагом 2.54мм.
Светодиоды на плате нужны больше для отладки, так что при желании их можно не ставить (как и соответствующие резисторы). Входные сигналы управления могут управляться как контроллером с 5В питанием, так и 3.3В. Как я уже писал выше, выходные сигналы подогнаны для работы с 3.3В микроконтроллером (в реальности они не превышают 3В), поэтому на контроллере с 5В питанием вся шкала АЦП использоваться не будет.
Выходной фильтр разделен на две части — до датчика тока и после. Это сделано из соображений удобства разводки, а не по каким-то более замысловатым соображениям.
Резисторы и конденсаторы в маломощных цепях — любые 0603 нужного номинала. Конденсатор в цепи подкачки драйвера (С1 на схеме, на плате обозначен как 1uFx50V) рекомендуется подобрать на максимальное напряжение какое удастся найти, но никак не менее 25В. Блокировочные конденсаторы по силовому питанию (47мкф) и в выходных фильтрах можно поставить чуть меньше (22мкф должны подойти), но, опять-таки, с рабочим напряжением побольше.
Индуктивность XAL1580-102 на 1мкГн. Вместо нее можно поставить IHLP5050 нужного номинала («в лоб» на футпринт для XAL1580 они не станут, но IHLP5050 есть в списке корпусов, так что перед печатью фотошаблона или отправкой на производство просто выберите нужный корпус из списка в редакторе плат Eagle).
Диоды — любые Шотки с напряжением хотя бы 30В и током хотя бы 1А (ну и подходящим футпринтом, конечно).
Транзисторам в преобразователе замены, увы, я не знаю.
К транзисторам в мосте требование только одно — минимальное сопротивление в открытом состоянии (ну и напряжения сток-исток и затвор-исток не менее 15В), поэтому можно попытаться выбрать другие. Футпринт под LFPAK достаточно универсален, большинство вариаций на тему Power-SO8 должны становиться без проблем. Впрочем, как и в случае с индуктивностью, в списке корпусов можно найти много всего разного, например, PQFN5x6.
Драйвер полумоста можно заменить на NCP5351 без переделки платы и без заметного ухудшения характеристик.
Вместо LM2745 можно применить LM2748 (у них даже даташит один на двоих). Должен подойти еще LM2746 и, возможно, LM2742 (это надо проверять). С небольшой переделкой схемы (добавлением внешней опоры) подойдет еще LM2744.
Плата сделана с использованием двухстороннего FR4 толщиной 1mm и толщиной меди 70 мкм (покупался на ebay). Размер платы подогнан так, что бы две такие платы влезали на заготовку размером 100х160мм. Не исключено, что подойдет и обычная 35 мкм фольга, но я этого не проверял. Наличие маски на плате обязательно.
Толстая фольга, отсутствие термопереходов на многих полигонах, наличие массивных деталей, достаточно плотный монтаж и выбор футпринтов — все это делает сборку обычным паяльником если не невозможной, то, как минимум, крайне неудобной и чреватой перегревом деталей. Поэтому настоятельно рекомендуется пайка в печке или, как минимум, на с использованием подогрева (стол для прогрева или, хотя бы фен). Впрочем, разъемы все равно приходится паять именно таким способом даже при использовании печки.
Типа итоги
Схема работает и, в принципе, делает то и так, как задумывалось изначально. Тем не менее, есть несколько моментов, из-за которых решение мне не очень нравится. Во-первых, 20-25, максимум 30А — предел для такого типа схем. Дальше нужно переходить к многофазным контроллерам, а это, хотя и вполне подходящий вариант, резко усложнит схему. Не столько с точки зрения схемотехники (тут, как раз, все просто), сколько с чисто конструктивной точки зрения. Вероятно более перспективным с этой точки зрения будет использование полумостового или полномостового DC-DC преобразователя с синхронным выпрямлением и квазирезонансным или резонансным режимом работы. В такой схеме с большими токами работает только непосредственно выпрямитель, причем режим работы транзисторов в выпрямителе близок к ZCV, что дает возможность довольно просто получать значительные токи. Впрочем, это тема для отдельного копания вглубь и вширь…Ну и на закуску несколько фоток:
we.easyelectronics.ru
Блок питания для домашней гальваники – Ярмарка Мастеров
Раньше в мой набор для домашней гальваники http://www.livemaster.ru/item/2190211-materialy-dlya-tvorchestva-nabor-dlya-domashnejвходил блок питания YaXun 1501. Главным достоинством его была скромная цена. Сила тока до 0.8А - достаточно для некрупных изделий. Сейчас появляется в продаже очень редко. Иногда под брэндом Element или не важно каким - внешний вид тот же. (К 2014 году, кажется, исчез совсем.)
Новый бюджетный вариант - блок 1502DD или просто 1502 (означает 15 Вольт, 2 Ампера), фирмы YaXun, Dazheng, Baku и прочие «китайцы». Рекомендую покупать самостоятельно - у вас будет гарантия магазина. Раньше у меня был запас на продажу, но с лета 2015-го вряд ли - цена ощутимо подросла, а качество средненькое: при тех же 0.8А он может часа за два перегреться. Какой экземпляр попадется... Так что - гарантия и еще раз гарантия.
Другие варианты и подробная информация по выбору БП - в моей статье - запрос в Яндексе или Гугле: dekorata блок питания для гальваники(Прямую ссылку не даю, т.к. здесь их удаляют. Цены там безнадежно устарели, но для понимания сути статья актуальна.)
Некоторые (но не все) БП для зарядки автомобильных аккумуляторов подходят для крупной гальваники. Начальная сила тока у них обычно 0,4 Ампер и больше. Для мелких изделий (и вообще в начале меднения по графиту) нужна сила тока 0,1-0,2 А.
----------------------------------------------------------------
Информация по БП для тех, кто разбирается в электричестве и может самостоятельно собрать схему из 2-3 деталек.
К любой 5-вольтовой зарядке, которая стабильно держит ток 0,7-1А можно последовательно с ванной добавить резистор - и вы получите нужную силу тока. Комбинацией резисторов ток можно регулировать. (Напряжение на ванне 0,3-0,5 В, сопротивление близко к нулю (меньше 1 Ома), так что при расчете величины резистора ее можно не учитывать.)
У лабораторных БП серии 1502 (выполненных по линейной схеме - регулирующий элемент (транзистор) последовательно с нагрузкой) сзади мощный транзистор, он сильно греется. Что чревато выходом блока из строя. Если включить последовательно с ванной резистор, часть тепла будет выделяться на нём. Пример расчета: 15 Вольт, 1 Ампер, напряжение на ванне очень мало - на транзисторе выделяется 15 Ватт тепла. Если включить резистор 12 Ом, при токе 1А на резисторе будет 12 Ватт, на транзисторе 3 Ватта. (все расчеты приблизительные).
Из автомобильных БП годятся "Орион" PW 265 и 325. Максимальные токи 7 и 18 Ампер. (Тонкие проволочки раскаляются докрасна, вплавляются в бортики пластмассовой ванны, сгорают! Реально для изделия размером с яблоко достаточно 3-5 Ампер.) У второго шумный вентилятор. У них одна ручка регулировки тока. Для снижения начального тока надо включить шунт (резистор параллельно ванне) 0,5-1 Ом.
www.livemaster.ru
Выпиливаем источник тока для гальваники... / Блог им. evsi / Сообщество EasyElectronics.ru
Занимаюсь подготовкой оснастки для металлизации плат и неожиданно для себя столкнулся с тем, что нормального источника для гальваники никто внятно не описал. Либо ужасы в стиле «трансформатор с табуретку и таких же размеров ЛАТР», либо не менее жесткие ужасы в стиле «стотыщпитсот советских транзисторов впараллель». Иногда попадаются любопытные схемы, но максимум, до чего дошла любительская мысль — использовать PWM для регуляции тока через ванну. Вобщем пришлось закатать рукава и разбираться самому. Решение еще далеко не окончательное, но предварительные результаты обнадеживают. Впрочем, есть и проблемы/вопросы, может кто чего путного подскажет… Сначала я хотел просто сделать мост с PWM, но по ходу дела подумалось, что, по сути, такой источник тока здорово похож на обычные стабилизаторы тока для светодиодов, разве что преобразование нужно делать не «вверх», а «вниз». То есть вместо step up делать step down. Поскольку токи могут быть большими, да и в планах есть реверс, то интегральные преобразователи сразу отсеялись, пришлось делать практически на рассыпухе (интегральные контроллеры таких источников, почему-то, попадаются очень не часто, да и стоят каких-то запредельных денег). Опять-таки, поскольку токи большие, сразу встал вопрос выбора диода. И тут же вопрос отпал, поскольку стало понятно, что единственным разумным решением, в данном случае, будет «синхронный выпрямитель», то есть вместо диода нужно использовать второй ключ, который управляется в противофазе с основным. В итоге родилась вот такая вот схемка: (Драйвер на схеме — IR2104, ключи — IRFZ44, индуктивность около 80мкГн). На вход 1 разъема JP1 подаем PWM сигнал (скажем, от микроконтроллера) около 150КГц. Меняя скважность PWM можно регулировать выходной ток. Причем, ток на выходе может быть значительно больше тока потребляемого схемой от источника питания (соотношение тока в нагрузке к току от источника питания примерно равно отношению напряжения питания к напряжению на нагрузке). В процессе тестовых запусков сжег лампочку и 5-ваттный резистор 2.2Ома, которые использовались в качестве нагрузки. Увы, они плохо переносят «вдувание» в них по 15ампер. Однако в процессе тестовых же запусков выяснилось и то, что полевики, все-таки, изрядно греются (они установлены на общий радиатор через изоляционные прокладки), причем греются не только при 15 амперах, но и при 3-4 тоже, а такие токи в процессе работы придется держать часами. И вот тут куда копать я не очень понимаю, опыта работы с такими схемами маловато. Пробовал поиграться частотой PWM, но заметной зависимости я не получил (хотя по теории, чем выше частота, тем больше потери и нагрев). На проблемы с разводкой не похоже, провода и плата не греются. Да, в качестве тестовой нагрузки используется резистор 0.22Ома, а резисторы датчика тока закорочены накоротко. Возможно дело в малом сопротивлении нагрузки или неправильном выборе компонентов. Вобщем, комментарии и советы по делу категорически приветствуются.P.S. печатки и игловских файлов не даю по одной простой причине — это только прототип, как доведу все до ума, в том числе реверс и управление — опубликую все полностью.
we.easyelectronics.ru
Источник тока для гальваники. Часть II
Часть 1Часть 2Часть 3Часть 4Понятно, что многим (включая меня самого) не терпится добраться до готовой схемы, но прежде чем смотреть готовое решение я, все-таки, хочу описать почему было выбрано именно такое решение и какие вообще есть варианты. Так что снова, осторожно, многабукаф. Начну более детальной формулировки задачи: — Необходимо получить нужное напряжение, то есть взять его из внешнего источника и преобразовать к нужной величине. — Необходимо стабилизировать ток, а значит его нужно, как минимум, померять с достаточной точностью. — Необходимо переключать направление тока через нагрузку, то есть нужна схема реверса.
Некоторые возможные подходы к решению задачи
Учитывая необходимые токи, пожалуй сразу можно исключить варианты линейных стабилизаторов тока. Помимо того, что они потребуют источник питания способный отдать максимальный ток при максимальном выходном напряжении. Поскольку в основном используется только малая часть из этого, то остальное придется рассеять в виде тепла. Что, помимо совершенно не рационального использования электроэнергии, еще и весьма геморройно конструктивно. Так что дальше будут рассматриваться только импульсные преобразователи.Вариант 1: Сетевой преобразователь наподобие компьютерного блока питанияВозможно это был бы оптимальный вариант, но в готовом придется переделывать слишком много, а от варианта делать с нуля меня пока останавливает необходимость мотать трансформаторы, ковыряться с высоким напряжением и разбираться с еще одной темой. По поводу переделки готовых блоков: в большинстве типовых схем блоков питания в выпрямителе стоят диоды, что на больших токах приводит к необходимости рассеивать изрядную мощность (десятки ватт). Переделка выпрямителя под синхронный (на полевиках) позволяет решить эту проблему, но сама переделка становится гораздо сложнее.Вариант 2: ШИМ-регулятор тока через нагрузку. Вариант вполне возможный, разве что блок питания для него нужен способный выдать максимальный ток с максимальным напряжением. Не смертельно, но неприятно.Вариант 3: Понижающий преобразовательПонижающий преобразователь или, как их еще называют, buck converter. Если более конкретно — синхронный вариант этого преобразователя. Если кто не в курсе, именно такие преобразователи используются (помимо других применений) на материнках для питания процессора. Кстати, задача очень похожая — низкие выходные напряжения и большие токи. Именно на этом варианте я и остановился, поэтому имеет смысл рассмотреть его подробнее. В некотором смысле его можно рассматривать как конвертер из одного сочетания ток/напряжение в другое сочетание ток/напряжение, причем напряжение на выходе ниже, чем на входе, а ток, соответственно, выше. Иначе говоря, мощность потребляемая из внешнего источника питания сохраняется (с поправкой на КПД, естественно). Из этих незамысловатых соображений непосредственно выплывает, что ток в нагрузке больше пропорционально отношению входного и выходного напряжений. То есть, например, из входных 12В х 15А можно получить, например, 4В х 45А (в идеальном случае) или 6В х 30А (в таком же идеальном случае). Учитывая типичные рабочие режимы описанные в предыдущей части, это позволяет использовать распространенные 12В блоки питания (хоть промышленные, хоть комповые) без переделок. Другие соображения, которые привели к выбору этого варианта: — Теория импульсных понижающих преобразователей весьма тщательно расписана, а информации море разливанное, от чистой математики до готовых программ позволяющих посчитать необходимые параметры схемы. — Огромное, просто невероятное количество всевозможных компонентов для таких преобразователей, от качественных транзисторов и драйверов к ним до готовых микросхем (и даже готовых преобразователей с индуктивностью на борту). Чтобы оценить масштабы достаточно сказать, что в каталоге Digikey более 28 тысяч позиций одних только контроллеров и интегрированных преобразователей, большинство из которых — понижающие преобразователи того или иного вида. В силу специфики задачи подходящих под задачу компонентов значительно меньше, но, тем не менее, выбрать есть из чего. Подробнее выбранные подходы к реализации я опишу ниже.Реверс
Для варианта сетевого преобразователя и использованием синхронного выпрямления, видимо, самым разумным будет менять местами фазы открытия ключей в выпрямителе. Выпрямитель (вместе с соответствующими ему потерями) в этом решении все равно неизбежен, а замена фаз позволит реализовать реверс практически «на шару».В случае понижающего преобразователя или ШИМ регулятора реверс можно реализовать двумя способами. Один вариант такой как у меня в предыдущих вариантах схемы. Второй — обычный полный мост. Плюсы и минусы обоих вариантов: — Вариант с полумостом для реверса: Плюсы: — простота схемы — минимум транзисторов (а это не только цена, но и потери на канале открытого транзистора) Минусы: — необходимость инвертировать ШИМ при переключении в реверсный режим. — транзисторы в преобразователе работают поочередно в разных режимах с противоречивыми требованиями, подобрать транзисторы способные работать в обоих режимах не так просто (о режимах транзисторов ниже) — драйвер управляющий реверсом должен поддерживать статический режим переключения при полном размахе напряжения на выходе (либо нужно предусматривать внешнюю схему генерации повышенного напряжения для драйвера). — необходимость в двуполярном датчике тока и, как следствие, сложность реализации автоматической (встроенной в силовую часть) стабилизации тока (хотя тут есть варианты).
— Вариант с полным мостом: Плюсы: — транзисторы преобразователя всегда работают в одном режиме, следовательно можно подбирать оптимальные под задачу транзисторы. — датчик тока может быть униполярным, при необходимости можно мерять ток на датчике между мостом и землей, без больших синфазных сигналов. — если не нужен полный размах напряжения на выходе, то драйвер моста можно питать просто входным напряжением. — простота реализации схемы стабилизации тока. Минусы: — вдвое больше транзисторов и больше потери на открытом канале.
Пару слов о потерях на открытых транзисторах в схеме реверса: на первый взгляд кажется, что они не велики, но элементарный подсчет показывает, что при токе в 30А открытый транзистор с сопротивлением канала в 1мОм (а это очень хороший транзистор) будет рассеивать около одного ватта. В случае полного моста таких транзисторов два, то есть в сумме получается почти 2 ватта (1.8, если быть точным). Для сравнения, у самого преобразователя в этом же режиме расчетные потери тоже около 2-х Вт.
Измерение тока
Как всегда, вариантов много. Можно мерять ток через нагрузку (прямой метод), можно мерять ток потребления всей схемы и вычислять ток через нагрузку (косвенный). Поскольку у большинства вариантов собственный ток потребления тоже изменяется при изменении тока через нагрузку, косвенный метод представляется, как минимум, не очень удобным. Дальше, в зависимости от того, в каком виде в схеме можно найти искомый ток (однонаправленный или двунаправленный), понадобится униполярная или биполярная схема измерения тока. У сетевого преобразователя с реверсом на переключении фаз и в схемах с реверсом на полумосте ток через нагрузку в схеме есть только в двунаправленном виде. В схеме реверса на мосте полярность тока меняется самим мостом, а до моста ток присутствует в однонаправленном виде. Следующий этап — тип датчика и схема выделения сигнала тока. Для обсуждаемой задачи годятся два типа датчиков — резистивный или магнитный на эффекте Холла. Резистивный датчик может быть как в виде, собственно, резистора, так в его качестве могут использоваться паразитные сопротивления, скажем, сопротивление открытого канала одного из ключей или внутреннее сопротивление индуктивности понижающего преобразователя. Паразитные сопротивления хороши тем, что они все равно есть и, раз уж они неизбежны, то пусть от них будет хоть какая-то польза. Плохи они тем, что «плывут» в зависимости от температуры, причем плывут сильно. Соответственно, для точного измерения тока понадобится еще и схема компенсации температурного дрейфа. Замечу, что там, где точное измерение тока не требуется (а, скажем, сигнал с датчика тока используется в схеме регулирования), паразитные сопротивления в качестве датчиков тока используется очень широко. Схема выделения (и усиления) сигнала с резистивного датчика это просто дифференциальный усилитель, либо специализированный, либо собранный на ОУ общего назначеения. В связи с этим есть немало заморочек — такие схемы работают с большими синфазными сигналами на входе, часто весьма шумными, сигнал с датчика весьма не велик по размаху (1мОм датчик на 30А даст всего 30мВ размаха сигнала, а амплитуда синфазной составляющей может достигать полного напряжения питания, то есть 12В). В нашем случае ситуация усугубляется тем, что мерять нужно достаточно точно, особенно малые токи. Датчик на основе эффекта Холла в подавляющем большинстве случаев интегрируется со схемой выделения и усиления сигнала, которая минимизирует количество необходимых внешних компонентов и вообще здорово упрощает жизнь. Второй любопытный (хотя и не критичный в нашем случае) момент — такие датчики изолированы от цепи, в которой меряется ток. Поскольку меряется, по сути, магнитное поле вокруг проводника с током, то для нормальной работы таких датчиков нужно конструктивно обеспечить фиксированное (и весьма небольшое) расстояние между проводником и датчиком. К счастью есть датчики с интегрированным проводником, так что внешне они выглядят как самые обычные микросхемы (или как страшные крокозяблы).Выбор
Как я уже писал выше, выбор пал на понижающий преобразователь. В основном из соображений (как мне тогда казалось) простоты. Потом оказалось, что все отнюдь не так просто, но это только подогрело интерес :) Изначально для реверса использовался полумост, а датчик тока был биполярным. Поскольку для управления использовался внешний контроллер (а в качестве драйвера — HIP4081, у которого как раз два драйвера полумоста в одном корпусе), такое решение было вполне оправданным, а схема очень простой. Одна беда — ШИМ генерировался контроллером, а это ограничивало частоту. Ограничение по частоте было бы проблемой, если бы не большая величина необходимой индуктивности. Намотать такую индуктивность и при этом получить низкое внутреннее сопротивление не так просто, а внутреннее сопротивление приводило к большому нагреву самой индуктивности. Решить эту проблему можно уходя в верх по частоте (а для этого понадобился встроенный в силовую часть генератор PWM), но тут уже начинали перегреваться транзисторы. Стало понятно, что «на глазок» выбрать транзисторы не получится, нужно просчитывать потери и подбирать транзисторы и драйверы. Просчитывание схемы и внимательное чтение источников дало ответы на многие вопросы и показало, что первоначальный вариант реверса (с полумостом) оптимизировать не удастся — слишком разные требования к транзисторам в преобразователе (об этом подробнее чуть ниже). Некоторое усложнение схемы, вызванное появлением генератора PWM на борту, подталкивало сделать следующий шаг — сделать стабилизацию тока и напряжения прямо на борту силовой части, слишком уж небольшими казались необходимые изменения (вот это предположение, кстати, оправдалось). В качестве бонуса это давало возможность сильно упростить задачи, которые должен решать контроллер. Ну и, конечно же, всю схему хотелось сделать максимально простой с точки зрения схемотехники. С этой новой отправной точки и начался поиск вариантов решения. И так, нужны следующие вещи: — схема управления (собственно, стабилизатор) — датчик тока — переключение режимов стабилизации ток/напряжение — реверс совместимый с первыми тремя. — (крайне желательно) возможность изменять частоту преобразованияСхема управления
Вариантов, на самом деле, достаточно много: — (1) Использовать интегральный контроллер понижающего преобразователя. Этот вариант имеет несколько подвариантов: а) полный преобразователь, с ключами на борту (например, такой) б) преобразователь с внешними ключами (примеров приводить не буду, их просто немерянное количество) в) преобразователь с внешними ключами, но вместо ключей подать сгенерированный преобразователем ШИМ на отдельный драйвер с дискретными ключами г) преобразователь с внешнммм ключами, но вместо ключей подать сгенерированный преобразователем ШИМ на отдельный драйвер с интегрированными ключами.— (2) Воспользоваться интегральным усилителем класса D. Тут есть два подварианта в зависимости от того, какой драйвер и ключи используются.
— (3) Собрать все на рассыпухе. Пожалуй, этот вариант интересен только с академической точки зрения.
— (4) Использовать «полуготовые» чипы типа MCP1630V. Варианты с драйверами и ключами имеются и здесь.
Не сложно заметить, что вместе с подвариантами набегает изрядное количество возможных подходов и выбрать не так просто. Попробую описать плюсы/минусы/особенности некоторых подходов: Вариант (1) предъявляет некоторые требования к контроллеру преобразователя, в частности, он должен поддерживать так называемый трекинг внешнего напряжения (используется в системах где важен порядок подачи питающих напряжений). В принципе, можна и без него, но схема усложнится, а, напомню, я стремился сделать схему простой. Второе требование — униполярный датчик тока. Это обусловлено тем, что все подобные контроллеры работают в «однополярном» режиме штатно (в режиме стабилизации напряжения). Третье требование (скорее пожелание) — возможность оперативно регулировать частоту преобразования.
Вариант (2) весьма любопытен поскольку «естественным образом» реализует реверс и оба режима стабилизации. Неприятных моментов два: — Схема симметричная и в силу этого «прямой» и «реверсный» полумосты работают в одинаковом режиме, то есть переключаются на полной рабочей частоте, и, следовательно, рассеивают «по полной программе». — Управляющее напряжение оказывается привязанным к половине питания. Это не то, чтобы проблема, скорее мелкое неудобство. Которое, к тому же, легко (хотя и не очень дешево) решается использованием интегральных переменных резисторов. Да, у некоторых подобных усилителей (например, у этих) есть возможность синхронизироваться от внешнего генератора, что позволяет реализовать изменение частоты преобразования.
Вариант (3) слишком громоздко, да и не нужно, по большому счету.
Вариант (4) достаточно хорош во всем кроме одного — необходим внешний генератор коротких импульсов. В остальном это, пожалуй, самый удобный и гибкий вариант.
По итогам прорисовки множества вариантов схем и перерывания гор даташитов был выбран вариант 1в. Причин три: очень простая схема, возможность тюнинга (в смысле выбора компонентов, в частности, компонентов моста) именно под конкретную задачу и, наконец, минимальные потери.
Пожалуй, пока этого достаточно, чтобы представлять, какие есть направления для поиска. Дальше я опишу как и что я считал и как выбирал конкретные схемные решения.
P.S. для тех, кто (как и я) любит заглядывать в конец книжки, чтобы узнать, чем все закончилось, сразу скажу, что планируется еще одна статья посвященная расчетам, выбору компонентов и конкретных схемных решений. затем будет статья со схемой и описанием.
we.easyelectronics.ru
Еще раз об источнике тока для гальваники / Блог им. evsi / Сообщество EasyElectronics.ru
После некоторого количества набитых шишек и убитых прототипов удалось, все-таки, сделать схему источника тока достаточно простую и одновременно достаточно эффективную. Аппетиты пока пришлось несколько поумерить и схема дает всего лишь +-10А (реально под нагрузкой длительное время несколько меньше, возможно это удастся исправить, см.ниже), но зато она содержит минимум компонентов и в процессе экспериментов продемонстрировала завидную живучесть (что, впрочем, не отменяет необходимости защит в блоке питания, который ее питает). Сразу оговорюсь, что я рассматривал только источники тока построенные по схеме buck конвертера. Другие варианты, в той или иной форме имитирующие реостат отпали в силу своей неэффективности и завышеных требований к источнику питания.Design considerations.
Основные грабли в источнике тока для гальваники — необходимость реверса. Это сразу сильно усложняет конструкцию как минимум по двум пунктам: измерение тока через нагрузку и необходимость коммутации нагрузки. Измерение тока через нагрузку решается путем применения специализированных микросхем, измерающих ток через нагрузку используя эффект Холла. Они имеют как минимум два важных для данной задачи преимущества перед традиционным токоизмерительным резистором: крайне малое падение напряжения на измерительном элементе и наличие возможности измерять ток в обоих направлениях (не во всех сенсорах это реализовано, так что выбирать надо внимательно). Это помимо полной гальванической развязки от нагрузки и встроенного преобразователя ток в нагрузке -> напряжение с достаточно большим разрешением (так что не нужно обрабатывать малые сигналы на фоне изрядных токов и помех гуляющих вокруг сенсора). С необходимостью коммутации нагрузки все несколько сложнее. Самое простое решение — использовать реле. Вариант не слишком удачный, поскольку короткие интервалы времени между переключениями направления с их помощью реализовать затруднительно. Кроме того, индуктивная нагрузка (а в цепи конвертера обязательно есть индуктивность), не самая приятная нагрузка для контактов. Другой вариант — переключение «в лоб» с помощью моста на полевых транзисторах. Этот вариант имеет немало преимуществ, в частности, мерять ток в нагрузке можно в однополярном режиме и изменение полярности можно делать независимо от режима работы конвертера. Очевидный недостаток — драйвер моста (или два драйвера полумоста) + 4 ключа — изрядный довесок к конвертеру который сам по себе содержит только половину этих компонентов. Ну и, наконец, третий вариант, который, собственно, я и применил. Если внимательно посмотреть на схему синхронного конвертера, то можно заметить, что схема симметрична относительно земли и питаня: Правый (по схеме) конец нагрузки можно подключить как к земле, так и к питанию. Дальнейший ход представляется очевидным — дополнить схему второй парой ключей (в итоге вся схема выглядит просто как полный мост). Ключи коммутирующие нагрузку к земле или питанию работают только в момент смены полярности, а поскольку это происходит относительно редко (по сравнению с частотой переключения конвертера), нагрузка на них минимальна и рассеиваемая мощность тоже. Важное замечание: при переключении полярности для сохранения тока через нагрузку нужно менять полярность PWM сигналов, поскольку плечи полумоста преобразователя меняются ролями — то плечо, которое работало синхронным выпрямителем начинает работать как «накачка» для индуктивности и наоборот.
Правый (по схеме) конец нагрузки можно подключить как к земле, так и к питанию. Дальнейший ход представляется очевидным — дополнить схему второй парой ключей (в итоге вся схема выглядит просто как полный мост). Ключи коммутирующие нагрузку к земле или питанию работают только в момент смены полярности, а поскольку это происходит относительно редко (по сравнению с частотой переключения конвертера), нагрузка на них минимальна и рассеиваемая мощность тоже. Важное замечание: при переключении полярности для сохранения тока через нагрузку нужно менять полярность PWM сигналов, поскольку плечи полумоста преобразователя меняются ролями — то плечо, которое работало синхронным выпрямителем начинает работать как «накачка» для индуктивности и наоборот.
Практическая реализация
После некоторого количества проб и ошибок появилась вот такая схема: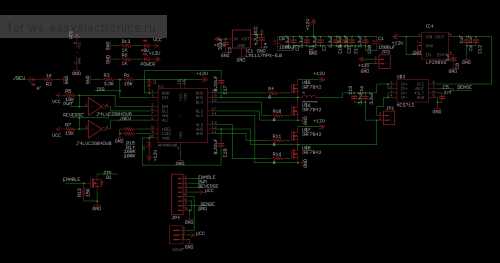 Я учел рекомендации, которые мне давали к предыдущей заметке на эту тему, так что транзисторы использовались с относительно небольшим зарядом затвора и малым сопротивлением в открытом состоянии. Это позволило обойтись без радиатора. Транзисторы на схеме отнюдь не рекордсмены по параметрам, скорее, «лучшее из того, что удалось быстро добыть». Резисторы в цепи затвора остались от предыдущей версии схемы, с небольшой переделкой платы их можно выбросить и соединить затворы с драйвером напрямую. В качестве драйвера используется HIP4081. У нее много достоинств — относительно небольшая цена, достаточно большие токи, маленькие задержки, программируемое время задержки между переключениями и возможность работы в статическом режиме (у нее встроенный генератор подкачки). Последний пункт важен для ключей изменяющих направление тока, поскольку там переключения происходят относительно редко, а могут и вообще не происходить (если, например, нужен режим работы без реверса). Резисторы подтяжки на входах инверторов и цепочка R1-R3 реализует рекомендуемый в аппноуте порядок подачи сигналов на входы DIS и входы управления ключами. В качестве датчика тока используется ACS712 фирмы Allegro. Эта микросхема имеется в трех исполнениях — на 5, 20 и 30А, так что нужно быть внимательным при покупке. Я использовал вариант на 20А. Важный нюанс: микросхемы имеют разный коэффициент преобразования тока в напряжение, варианты на бОльшие токи имеют меньшую чувствительность. Когда ток через нагрузку не течет, на выходе микросхемы напряжение около 2.5В, при изменении тока, в зависимости от направления, это напряжение увеличивается или уменьшается. Замечу, что при токах больше ~10A для АЦП (и контроллеров) питающихся от 3.3В выходное напряжение сенсора нужно подавать на вход АЦП через делитель, поскольку оно выйдет за верхнюю границу диапазона. Ну и, с учетом подтяжки на некоторых входах, управляющие выходы таких контроллеров должны быть устойчивы в 5В. Возможно имеет смысл использовать стабилизатор на 3.3В и питать цифровую часть сразу от 3.3В. Стабилизаторов напряжения на 5В два — один для аналоговой части и один для цифровой. Выход стабилизатора цифровой части выведен на разъем и от него питается схема управления. Для питания аналоговой части используется LP2985A. Выбор обусловлен двумя причиами — малый шум и довольно высокая точность калибровки выходного напряжения. С учетом того, что это напряжение является опорным для сенсора, фактор немаловажный. Диоды — обычные 0540 в корпусе SOD123, хотя там подойдут любые, те же 4148, например. Электролиты «компьютерные», с малым ESR. Ну и, наконец, о грустном — индуктивность. Подобрать подходящую готовую так и не удалось, пришлось мотать самому. Мотал проводом 1.2 на оправке диаметром 16мм (кусок трубки для кабелей). Длина намотки около 40мм, намотка послойная, в общей сложности около 100 витков. После намотки индуктивность была залита полимерным клеем. Замер индуктивности показал ~90мкГн. Этого маловато для малых токов на малых частотах ШИМ, но главная проблема в другом — на токах близких к максимальным она довольно здорово греется и, что особенно неприятно, греет полигоны, которые охлаждают транзисторы и, собственно, приводит к тому, что длительное время работать с максимальным током невозможно. Видимо придется переделывать еще раз (это вторая попытка). Разумные рекомендации по конструкции принимаются с благодарностью.
Частоту ШИМ я пробовал в диапазоне от 36 до 200кГц. Низкие частоты конструкция переживает явно лучше в плане нагрева.
Я учел рекомендации, которые мне давали к предыдущей заметке на эту тему, так что транзисторы использовались с относительно небольшим зарядом затвора и малым сопротивлением в открытом состоянии. Это позволило обойтись без радиатора. Транзисторы на схеме отнюдь не рекордсмены по параметрам, скорее, «лучшее из того, что удалось быстро добыть». Резисторы в цепи затвора остались от предыдущей версии схемы, с небольшой переделкой платы их можно выбросить и соединить затворы с драйвером напрямую. В качестве драйвера используется HIP4081. У нее много достоинств — относительно небольшая цена, достаточно большие токи, маленькие задержки, программируемое время задержки между переключениями и возможность работы в статическом режиме (у нее встроенный генератор подкачки). Последний пункт важен для ключей изменяющих направление тока, поскольку там переключения происходят относительно редко, а могут и вообще не происходить (если, например, нужен режим работы без реверса). Резисторы подтяжки на входах инверторов и цепочка R1-R3 реализует рекомендуемый в аппноуте порядок подачи сигналов на входы DIS и входы управления ключами. В качестве датчика тока используется ACS712 фирмы Allegro. Эта микросхема имеется в трех исполнениях — на 5, 20 и 30А, так что нужно быть внимательным при покупке. Я использовал вариант на 20А. Важный нюанс: микросхемы имеют разный коэффициент преобразования тока в напряжение, варианты на бОльшие токи имеют меньшую чувствительность. Когда ток через нагрузку не течет, на выходе микросхемы напряжение около 2.5В, при изменении тока, в зависимости от направления, это напряжение увеличивается или уменьшается. Замечу, что при токах больше ~10A для АЦП (и контроллеров) питающихся от 3.3В выходное напряжение сенсора нужно подавать на вход АЦП через делитель, поскольку оно выйдет за верхнюю границу диапазона. Ну и, с учетом подтяжки на некоторых входах, управляющие выходы таких контроллеров должны быть устойчивы в 5В. Возможно имеет смысл использовать стабилизатор на 3.3В и питать цифровую часть сразу от 3.3В. Стабилизаторов напряжения на 5В два — один для аналоговой части и один для цифровой. Выход стабилизатора цифровой части выведен на разъем и от него питается схема управления. Для питания аналоговой части используется LP2985A. Выбор обусловлен двумя причиами — малый шум и довольно высокая точность калибровки выходного напряжения. С учетом того, что это напряжение является опорным для сенсора, фактор немаловажный. Диоды — обычные 0540 в корпусе SOD123, хотя там подойдут любые, те же 4148, например. Электролиты «компьютерные», с малым ESR. Ну и, наконец, о грустном — индуктивность. Подобрать подходящую готовую так и не удалось, пришлось мотать самому. Мотал проводом 1.2 на оправке диаметром 16мм (кусок трубки для кабелей). Длина намотки около 40мм, намотка послойная, в общей сложности около 100 витков. После намотки индуктивность была залита полимерным клеем. Замер индуктивности показал ~90мкГн. Этого маловато для малых токов на малых частотах ШИМ, но главная проблема в другом — на токах близких к максимальным она довольно здорово греется и, что особенно неприятно, греет полигоны, которые охлаждают транзисторы и, собственно, приводит к тому, что длительное время работать с максимальным током невозможно. Видимо придется переделывать еще раз (это вторая попытка). Разумные рекомендации по конструкции принимаются с благодарностью.
Частоту ШИМ я пробовал в диапазоне от 36 до 200кГц. Низкие частоты конструкция переживает явно лучше в плане нагрева.
Немного о плате
Для удобства описания приведу разводку в виде картинки: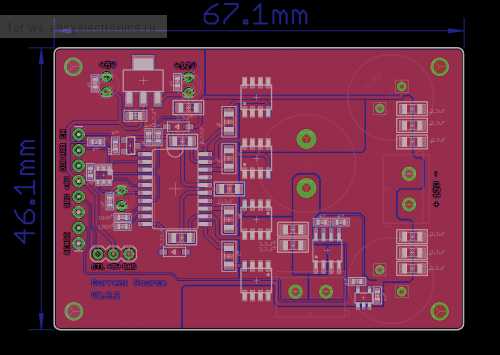 Плата в аттаче двусторонняя, но второй слой функциональной нагрузки не несет, свой прототип я делал односторонним. Применение транзисторов в корпусах типа SO8 позволило уложиться в один слой и сделать достаточно большие полигоны для отвода тепла. При переделке платы советую особое внимение обратить на то, как разведено питание и земля. С (опять-таки, небольшими) изменениями в разводке можно применить значительно более эффективные в плане отвода тепла и с бОльшими максимальными токами транзисторы в QFN 5x6 типа IRFH5250D, IRFH5300, IRFH5302.
Плата в аттаче двусторонняя, но второй слой функциональной нагрузки не несет, свой прототип я делал односторонним. Применение транзисторов в корпусах типа SO8 позволило уложиться в один слой и сделать достаточно большие полигоны для отвода тепла. При переделке платы советую особое внимение обратить на то, как разведено питание и земля. С (опять-таки, небольшими) изменениями в разводке можно применить значительно более эффективные в плане отвода тепла и с бОльшими максимальными токами транзисторы в QFN 5x6 типа IRFH5250D, IRFH5300, IRFH5302.
Возможные направления развития Как я упоминал выше, имеет смысл попробовать транзисторы в QFN. По цене они мало отличаются от тех, что в схеме, а параметры явно лучше. Собираюсь еще попробовать чуть-чуть увеличить сопротивления задающие dead time (R14 и R15 на схеме). Возможно это позволит поднять рабочие частоты хотя бы до 140-150кГц, и это позволит, соответственно, снизить требования к индуктивности. Другим направлением, которое явно стоит покопать глубже, является использование многофазных конвертеров. Именно такие конвертеры применяются на материнках для питания процессоров. Распараллеливание со сдвигом фазы имеет много преимуществ — эффективная частота преобразования пропорциональна количеству фаз, а при правильном выборе фаз и режимов работы можно получить непрерывный ток в нагрузке без зглаживания. К сожалению, контроллеры таких конвертеров штука довольно редкая в свободной продаже, а сами контроллеры плохо приспособлены для регулирования выходного тока. Зато получить сотню ампер таким конвертером задача, вобщем, рутинная…
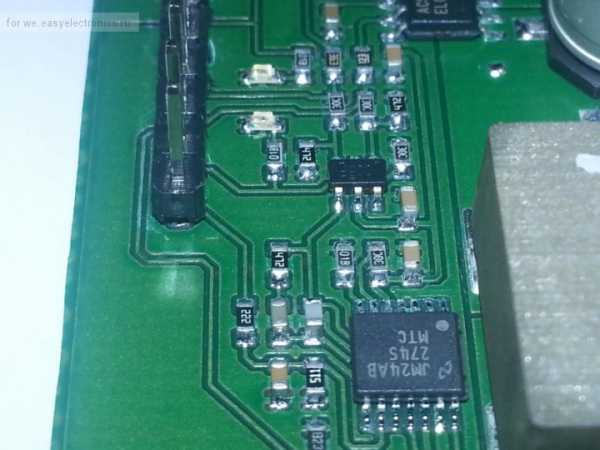
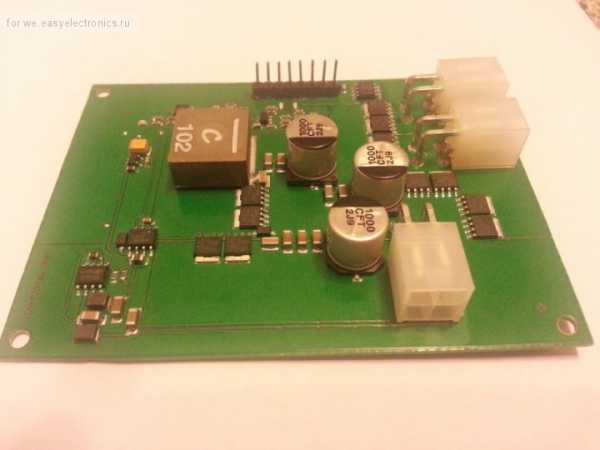
Фотки
Сразу предупреждаю, что плата не очень хорошо отмыта, все-таки это прототип, который многократно перепаивался.


Традиционное Комментарии по делу и рекомендации по улучшению категорически приветствутся.
Update После небольшого увеличения dead time и замены катушки на выдранный из компового БП дроссель частоту удалось легко поднять до 100кГц, а нагрев заметно снизить. Дроссель несколько слабоват и все-таки греется, но значительно меньше и, соответственно, значительно меньше греет транзисторы. Новый (надеюсь правильный) дроссель уже посчитал и сделал, но под него надо переделывать плату. Еще раз спасибо всем за полезную информацию.
Update2 Первые эксперименты с реверсивным током показали, что возня с источником того стоила — удалось поднять плотность тока до 3А/дм и при этом практически нет «подгара». Правда, качать плату приходится весьма интенсивно.
Update3 В аналогичном обсуждении на радиокоте мне удалось более внятно объяснить почему моя схема выглядит именно так, как выглядит. По просьбе одного из камрадов процитирую самого себя тут, что бы вся инфа была в одном месте. По ходу объяснения упоминается схема, ее можно посмотреть тут.
Как верно заметил камрад led_fan, это степ-даун с синхронным выпрямлением. Верхний транзистор левого по схеме полумоста вместе с индуктивностью образуют понижающий преобразователь (степ-даун). К традиционной схеме преобразователя не хватает только диода между левым выводом индуктивности и землей. Вместо него стоит нижний транзистор левого полумоста. Когда открывается верхний транзистор, индуктивность накапливает энергию. Потом, когда верхний транзистор закрывается, открывается нижний и индуктивность отдает накопленную энергию в нагрузку. Регулируя соотношение времен в течении которых открыты каждый из транзисторов мы можем регулировать напряжение на нагрузке. В идеале (если вообще нет потерь), мощность потребляемая от источника питания равна мощности отдаваемой в нагрузку. Следовательно, ток потребляемый от источника питания равен току через нагрузку деленному на соотношение напряжения на нагрузке к напряжению питания (например, при питании 12В и напряжении на нагрузке 1.2В мы можем прокачать через нагрузку 10А потребляя только 1А от источника питания). Вариант схемы понижающего преобразователя, в которой вместо диода стоит второй транзистор открывающийся в противофазе с основным, называется «преобразователь с синхронным выпрямлением» или просто «синхронный преобразователь». Кстати говоря, все мощные преобразователи (расчитанные на большие выходные токи), в частности те же регуляторы питания CPU на материнках, все делаются по синхронной схеме. Преимущество такого варианта в том, что падение напряжения на нижнем транзисторе значительно ниже прямого падения на диоде.Из всего написанного выше есть несколько важных выводов (применительно к обсуждаемой схеме): 1. При переключении в режим реверса транзисторы меняются ролями — нижний «накачивает» индуктивность, а верхний работает синхронным выпрямителем для нижнего. Из этого, в свою очередь, становится (надеюсь) понятно, что при переключении в режим реверса нужно менять скважность PWM сигнала на «дополнительную»: скажем, если у нас таймер настроен так, что время цикла занимает 1024 отсчета, для получения тока через нагрузку 1А мы выставляли PWM, например, в 100 (скважность ~10%), то при переключении в режим реверса скважность нужно поставить ~90% (то есть выставить PWM в 1024-100 = 924) для сохранения тока через нагрузку (по абсолютной величине). 2. Емкость, которая фильтрует выходное напряжение преобразователя лучше ставить параллельно нагрузке, а не между выходом и землей. В реверсном режиме она просто не будет работать как ожидается — в режиме реверса она будет включена последовательно с конденсаторами фильрующими питание всей схемы и это может привести к разной форме тока через нагрузку в прямом и реверсном режимах (особенно если конденсаторы по питанию со значительным ESR). 3. Емкость фильтра не должна быть большой. Во-первых, это не нужно при достаточной частоте PWM, во-вторых, в момент переключения прямой-реверсный режим эта емкость перезаряжается через один из транзисторов правого (по схеме) полумоста, что, естественно, не идет ему на пользу. 4. Как я уже не раз писал, ток потребляемый от источника питания и ток через нагрузку напрямую не связаны и могут отличаться в разы. Следовательно, мерять нужно ток в цепи, в которую включена нагрузка. Токоизмерительный резистор между землей и истоками нижних транзисторов полумоста позволит померять ток потребляемый от источника питания, но не ток через нагрузку. Мерять ток через нагрузку можно тремя способами: а) специализарованный датчик тока в цепи нагрузки (не важно какой, резистор, датчик на эффекте Холла как у меня в схеме или еще какая байда), б) мерять падение напряжения на внутреннем сопротивлении индуктивности, в) мерять падение напряжение на открытом канале транзистора работающего (в данный момент) синхронным выпрямителем. Вариант а) с резистором и варианты б) и в) принципиально одинаковы, различия лишь в том, какое сопротивление используется и в том, какой температурный коэффициент сопротивления у датчика (индуктивность и открытый канал транзистора имеют значительный положительный ТКС). Применительно к обсуждаемой схеме варианты основанные на измерении падения напряжения на сопротивлении датчика имеют один существенный недостаток: для выделения сигнала с датчика нужен дифференциальный усилитель. В схеме с реверсом этот усилитель будет работать в тяжелом режиме — большие синфазные сигналы на входах близкие к напряжениям питания (причем прыгающие от одного полюса к другому). Причем выделить нужно сигнал достаточно малой величины — скажем, с токоизмерительного резистора 10мОм при токе через нагрузку 1А сигнал составит всего 10мВ на фоне синфазной помехи порядка 12В и полосой в мегагерц (а то и несколько мегагерц). После того, как я попытался подобрать подходящий для этой цели операционник, стоимость специализированного датчика тока на основе эффекта Холла (аллегровский ACS712 в моем случае) меня здорово обрадовала. Добавьте к этому удобство использования того сигнала, который он генерирует, изрядную чувствительность, отсутствие необходимости делать температурную компенсацию и минимум необходимой обвязки и станет понятно, почему в своей схеме я использовал именно его, а не токоизмерительный резистор (или его вариации).
Да, думаю важно уточнить, что правый полумост переключается редко, только при смене полярности, основную нагрузку несет левый полумост. И от того, насколько быстро его можно переключать напрямую зависит размер индуктивности, а от этого, в свою очередь, зависят не только габариты, но и то, насколько она будет греться.
we.easyelectronics.ru







Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






