
Отличия асинхронных двигателей от синхронных
Применение электродвигателей в различных отраслях промышленности и быта широко распространено, в связи с экономичностью и простотой подключения и обслуживания. Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.
Асинхронные двигатели
Как и любые электрические двигатели, асинхронные моторы представляют собой устройства, которые создают крутящий момент при помощи преобразования электрического тока. Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Строение асинхронного двигателя в целом аналогично с синхронным. Он состоит из:
- Цилиндрического статора из металлических пластин с пазами для обмотки;
- Фазного либо короткозамкнутого ротора;
- Подвижных и неподвижных деталей корпуса, таких как вал, подшипники, вентилятор охлаждения, электрического оборудования.


Используется тип двигателя асинхронный в различных приводах как в промышленности, так и быту. Например, для обеспечения работы конвейеров, подъемных механизмов кранов и экскаваторов, деревообрабатывающих станков и других механизмов, как крупногабаритных, так и небольших бытовых.
Обслуживание и ремонт такого типа электромоторов не требует больших затрат, однако, для трансформации крутящего момента и понижения частоты вращения необходимо использовать редуктора различной сложности, часто с большим передаточным числом.
Синхронные двигатели
Основное отличие синхронного двигателя от асинхронного в том, что частота вращения магнитных полей при его работе совпадает, то есть является синхронной. Для синхронизации частот вращения используется дополнительный источник постоянного питания, что делает конструкцию синхронного электродвигателя сложнее и частично ограничивает сферу применения такого вида машин. Кроме того, работа такого типа двигателя возможна только с использованием частотного преобразователя.
В сфере применения, электродвигатели синхронные – это промышленные моторы большой мощности, которые используются в различных промышленных устройствах и оборудовании, где необходима повышенная мощность и возникают перегрузки.
Важной особенностью такого типа электромоторов является то, что при работе с перегрузкой устройство отдает часть реактивной мощности в сеть, что способствует повышению мощности, компенсирует падение мощности.
Синхронные двигатели бывают также таких типов:
- Гистерезисные двигатели используются в точных механизмах для создания вращения. Например, в звукозаписи, медицинском оборудовании, машиностроении
- Шаговые электродвигатели применяются в точных приборах и механизмах, таких как, например, станки с числовым программным обеспечением.
Преимущества и недостатки синхронных и асинхронных электродвигателей
Что бы определить, какой двигатель лучше синхронный или асинхронный, необходимо рассмотреть сферу применения этих устройств.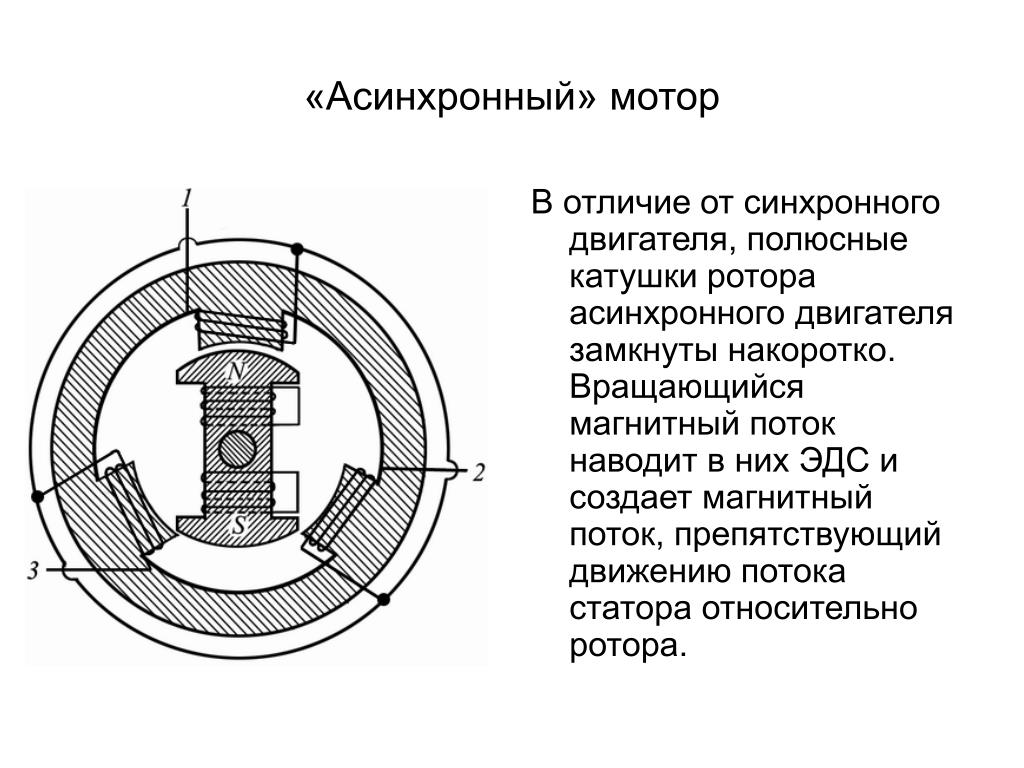
Асинхронные двигатели дешевле в производстве и не требуют дополнительного питания и устройства для запуска, в отличии от синхронных, поэтому, их использование более распространено. Кроме того, подключение и обслуживание таких двигателей также стоит дешевле, как и их производство.
Синхронные двигатели, кроме повышенной мощности, обладают еще одним важным преимуществом – возможностью генерации низкой частоты вращения без использования дополнительных передач в редукторах. При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.
Однако, синхронные двигатели имеют и недостатки. Кроме того, что требуется дополнительное питание и оборудование запуска, в таком типе электродвигателей происходит быстрый износ подвижных токосъемных деталей, таких как щётки и контактные кольца. Для замены изношенного оборудования требуются средства, что еще более увеличивает стоимость использования синхронных моторов.
Кроме того, настройка и обслуживание синхронных двигателей имеет ряд особенностей и требует более глубоких знаний технических особенностей.
Какой тип двигателя выбрать
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При использовании любого вида электрических двигателей стоит помнить, что срок их службы зависит от соблюдение технического регламента при подключении, настройке и последующему обслуживанию такого оборудования. При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
Синхронный двигатель: принцип работы, устройство, назначение
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
 В нём расположены обмотки. Его еще называют якорем.
В нём расположены обмотки. Его еще называют якорем.Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
 Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
 Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
Структура обозначения электродвигателей
Расшифровка обозначения:
X1 – тип электродвигателя (асинхронный или синхронный):
А – асинхронный;
С – синхронный.
X2 – тип электродвигателя по степени взрывозащиты:
D – взрывонепроницаемая оболочка Exd;
P – оболочка под избыточным давлением Exp.
Примечание: двигатели общепромышленного исполнения не маркируются.
X3 – тип электродвигателя (вертикальный или горизонтальный):
V – вертикальный.
Примечание: горизонтальные двигатели не маркируются.
Х4 – высота оси вращения:
Указывается точное числовое значение высоты оси вращения ЭД в мм.
Примечание: для вертикальных ЭД высота оси вращения не указывается.
Х5 – тип охлаждения:
А – воздушное охлаждение замкнутого типа;
W – водяной тип охлаждения;
AW – воздушно-водяной тип охлаждения.
Примечание: воздушное охлаждение разомкнутого типа не маркируется.
X6 – номинальная мощность ЭД в кВт:
Указывается точное значение номинальной мощности ЭД в кВт.
Х7 – номинальное напряжение питания ЭД в кВ:
Указывается точное значение номинального напряжения питания ЭД в кВ.
Х8 – количество полюсов:
Указывается точное значение количества полюсов ЭД.
X9 – климатическое исполнение и категория размещения:
Указывается тип климатического исполнения и категория размещения по ГОСТ 15150.
Пример обозначения электродвигателя при заказе:
A630-1250/6-2-УХЛ4 – Асинхронный общепромышленный горизонтальный электродвигатель, с высотой оси вращение 630 мм, с воздушным охлаждением разомкнутого типа, мощностью 1250 кВт, напряжением 6 кВ, двухполюсный, климатического исполнения и категории размещения УХЛ4 по ГОСТ 15150.
AD560A-1250/10-2-УХЛ4 – Асинхронный взрывозащищенный (типа Exd) горизонтальный электродвигатель, с высотой оси вращения 560 мм ,с воздушным типом охлаждением, мощностью 1250 кВт, напряжением 10кВ, двухполюсный, климатического исполнения УХЛ4 по ГОСТ 15150.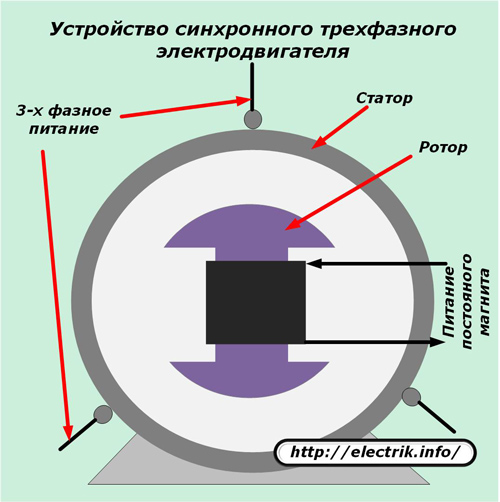
AP680A-5000/10-2-УХЛ4 – Асинхронный взрывозащищенный (типа Exp) горизонтальный электродвигатель, с высотой оси вращения 680 мм, с воздушным охлаждением замкнутого типа, мощностью 5000 кВт, напряжением 10кВ, двухполюсный, климатического исполнения категории размещения УХЛ4 по ГОСТ 15150.
ADVA-800/6-6-УХЛ1 – Асинхронный взрывозащищенный (типа Exd) вертикальный электродвигатель, с воздушным охлаждением замкнутого типа, мощностью 800 кВт, напряжением 6кВ, шестиполюсный, климатического исполнения и категории размещения УХЛ1 по ГОСТ 15150.
С860-8000/10-2-УХЛ4 – Синхронный общепромышленный горизонтальный электродвигатель, с высотой оси вращения 860 мм, с воздушным охлаждением разомкнутого типа, мощностью 8000 кВт, напряжением 10кВ, двухполюсный, климатического исполнения и категории размещения УХЛ4 по ГОСТ 15150.
СP860AW-8000/10-2-УХЛ4 – Синхронный взрывозащищенный электродвигатель (тип Exp) горизонтальный, с высотой оси вращения 860 мм, с жидкостно-воздушным типом охлаждением, мощностью 8000 кВт, напряжением 10кВ, двухполюсный, климатического исполнения и категории размещения УХЛ4 по ГОСТ 15150.
Синхронный и асинхронный двигатель. Что такое синхронный двигатель
Синхронный двигатель, в отличии от своего асинхронного собрата, имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью (например, компрессоры, вентиляторы, насосы и прочее).
Как устроен синхронный двигатель?
В статоре такого электроприбора имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронный двигатель и его разновидности
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Синхронный двигатель и принцип его работы
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Синхронный двигатель и его особенности
Нельзя не упомянуть о некоторых специфических моментах. Например, о том, что у таких машин нет пускового момента. Это происходит по той причине, что из-за своей инертности ротор просто не успевает развить нужное количество оборотов. Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.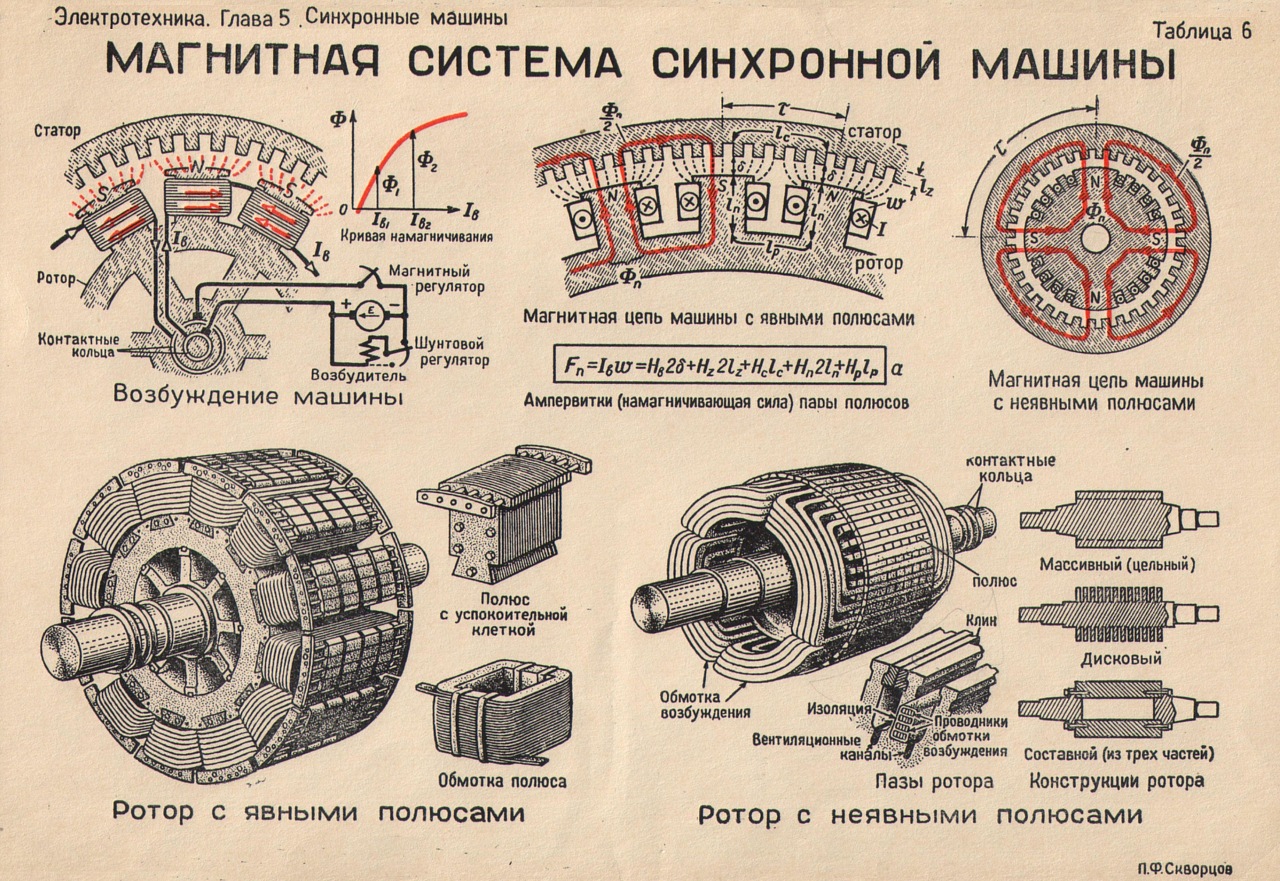
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.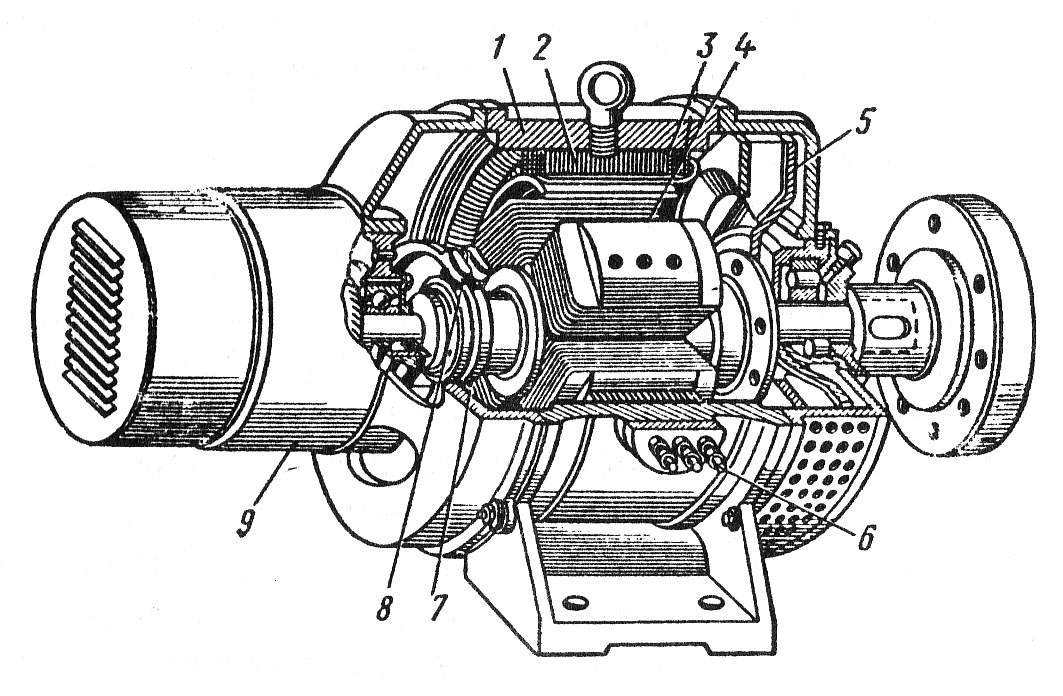
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
 Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
 Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
 Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
 Это является фактором надежности подобных конструкций моторов.
Это является фактором надежности подобных конструкций моторов.Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Чем синхронный двигатель от асинхронного отличается такой вопрос часто задают на различных форумах.
Чем синхронный от асинхронного двигателя отличается
Основное отличие в том, что у асинхронного двигателя скорость вращения ротора всегда меньше, скорости вращения магнитного поля в то время как у синхронного же двигателя скорость ротора или равна или в особенных случаях конструкции кратна скорости ротора.
А так много отличий на самомм деле, но это самые основные из-за них они собственно говоря так и называются.
Асинхронные
двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного
двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по количеству оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
какие они бывают / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т. п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана
отдельная статья
. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также
была отдельная статья
. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.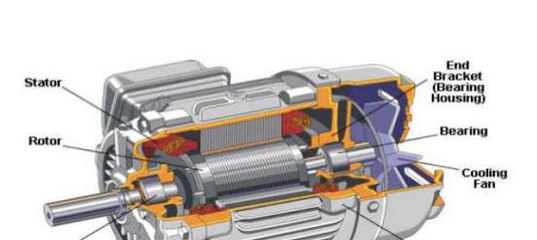
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).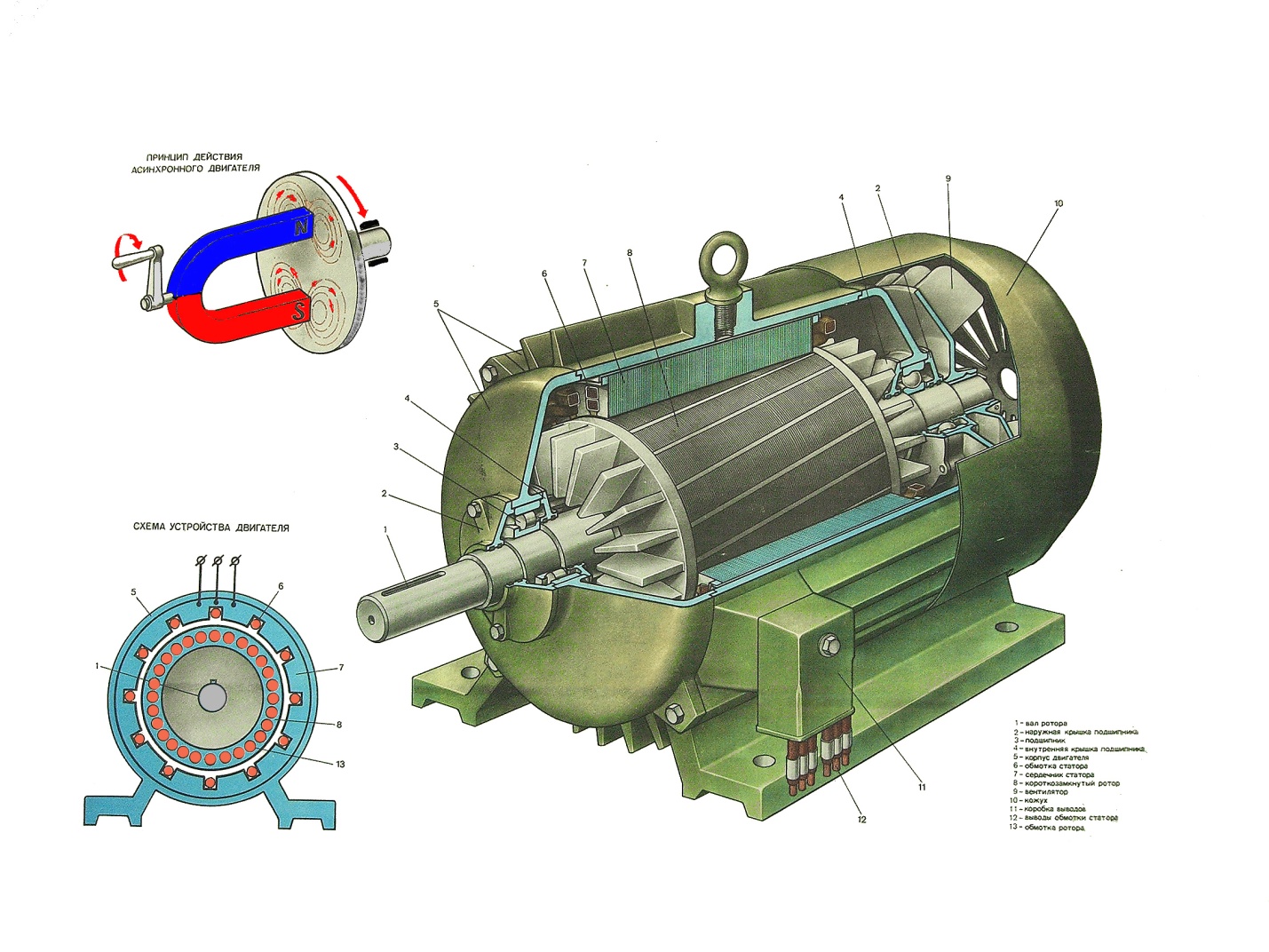
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже.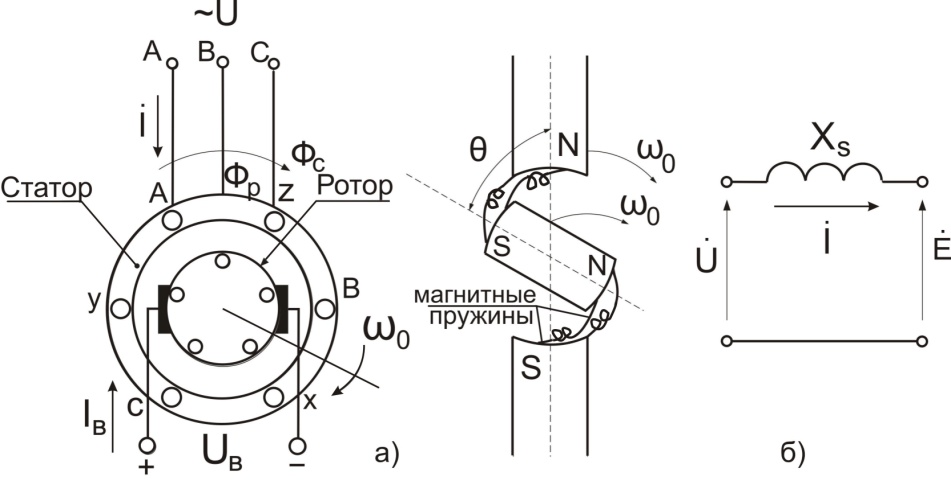 Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т. п.
п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.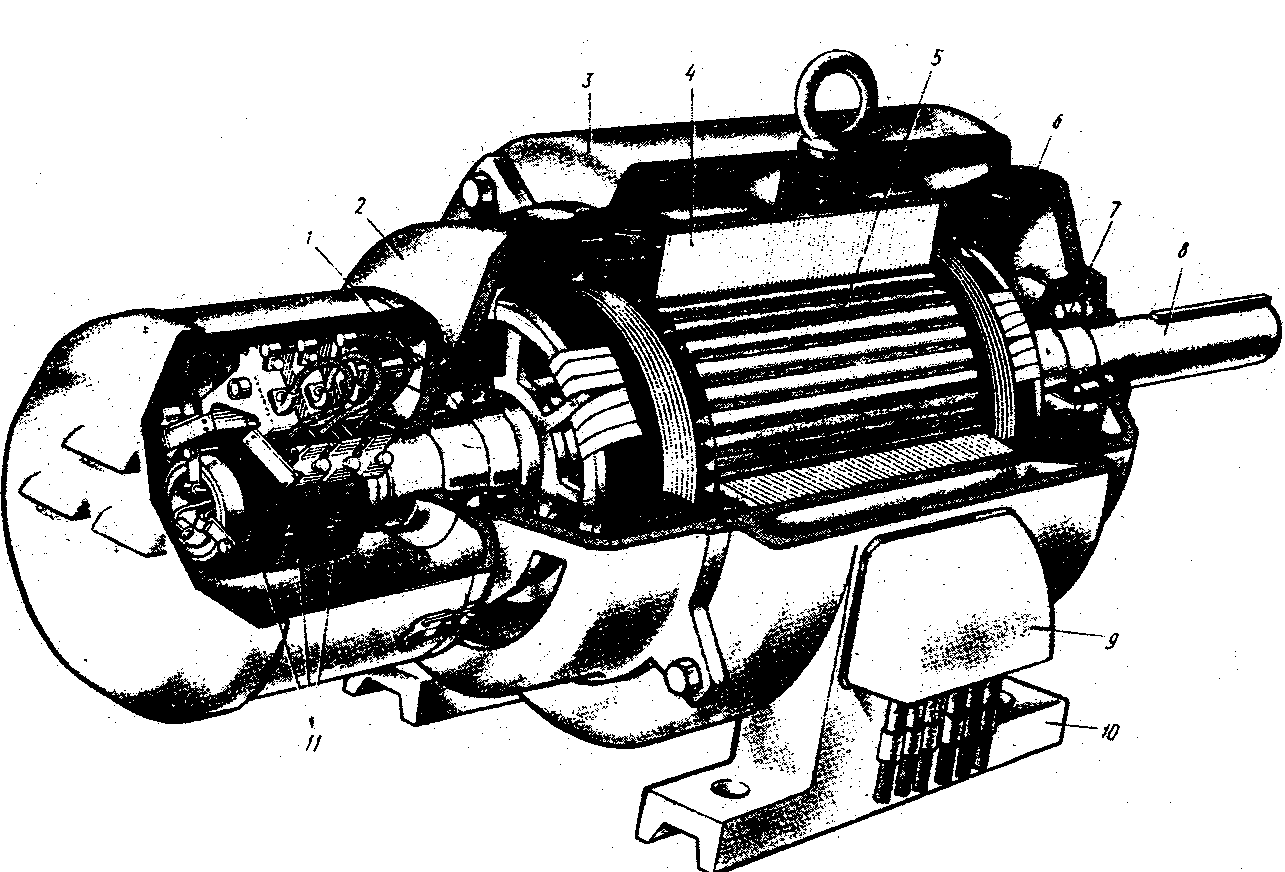 п.). Какая же электрическая машина переменного тока может с ним поспорить?
п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Скорость асинхронных двигателей синхронная вращения асинхронных
Синхронные генераторы, применяемые на автомобильных кранах, по своему принципиальному устройству не от—личаются от асинхронных двигателей. Синхронный генератор представляет собой электрическую машину, скорость вращения которой находится в строгом постоянном отношении к частоте сети переменного тока, с которой эта машина работает. Все гене-.раторы переменного тока промышленной частоты (50 гц) являются синхронными машинами.
[c.123]
Главный электродвигатель прокатного стана приводит во вращение валки и является двигателем специального (металлургического) типа с воздушным продуваемым охлаждением. На станах с постоянней скоростью прокатки применяют синхронные или асинхронные двигатели на станах с регулируемой скоростью прокатки применяют двигатели постоянного тока, питаемые от специальных машинных преобразователей или ртутных выпрямителей. Мощность главных электродвигателей и число оборотов колеблются в очень больших пределах в зависимости от типа стана. Мощности двигателей для некоторых станов приведены в краткой характеристике станов.
[c.395]
Мощность главных электродвигателей и число оборотов колеблются в очень больших пределах в зависимости от типа стана. Мощности двигателей для некоторых станов приведены в краткой характеристике станов.
[c.395]
Синхронный генератор представляет собой электрическую машину, скорость вращения которой находится в строгом постоянном отношении к частоте сети переменного тока, от которой эта машина работает. Принципиальное устройство синхронного генератора такое же, как асинхронных двигателей. Синхронный генератор состоит из неподвижной части — статора и вращающейся части — ротора. В пазах статора расположена основная трехфазная обмотка. В пазы ротора, кроме основной обмотки, вложена дополнительная трехфазная обмотка для питания схемы возбуждения генератора. Начала фаз дополнительной обмотки подведены к стабилизатору, а концы—к щеткам механического выпрямителя. [c.25]
Скорость синхронная вращения асинхронных двигателей трехфазных
[c. 471]
471]
Изменение приложенного напряжения. Этот способ применим при питании электродвигателя от своего генератора — система Леонарда. В этом случае цепь якоря шунтового двигателя питается от шунтового генератора, приводимого во вращение любым двигателем. В современных условиях для этой цели используются либо асинхронные, либо синхронные двигатели. С помощью изменения тока возбуждения генератора изменяется и напряжение, приложенное к цепи якоря двигателя. Изменение тока возбуждения генератора от максимального значения в одном направлении до нуля и затем от нуля до максимального значения обратного направления позволит снизить скорость электродвигателя от максимальной до нуля и затем получить вращение в обратном направлении. [c.532]
Для осуществления синхронного вращения и чтобы можно было регулировать скорость, двигатели (с контактными кольцами) приводных станций получают двойное питание. Статоры их включены в сеть, а роторы соединены между собой и присоединены (навстречу) к ротору асинхронной машины, вращаемой главным электродвигателем. Асинхронная машина и асинхронные электродвигатели приводов работают как вспомогательные машины электрического вала. Вариатор скорости включается между главным электродвигателем и асинхронной машиной и при одном вариаторе синхронизируются числа оборотов нескольких приводов.
[c.1073]
Асинхронная машина и асинхронные электродвигатели приводов работают как вспомогательные машины электрического вала. Вариатор скорости включается между главным электродвигателем и асинхронной машиной и при одном вариаторе синхронизируются числа оборотов нескольких приводов.
[c.1073]
Синхронная скорость вращения Пс — число оборотов вращающегося магнитного поля асинхронного двигателя в минуту
[c.482]
Прямой пуск короткозамкнутых двигателей. Коротко-замкнутые асинхронные двигатели обычно пускаются непосредственно от сети на полное напряжение. Начальный пусковой момент М и начальный пусковой ток 1 короткозамкнутых двигателей при пуске под полным напряжением колеблются в зависимости от синхронной скорости вращения, мощности и формы исполнения ротора. [c.508]
Схемы устройства асинхронно-синхронных муфт индукторного и панцирного типа показаны на рис. V.28. Конструкция индуктора такая же, как у муфт индукторного и панцирного типа. Размеры зубьев якоря равны размерам зубьев индуктора. В этой муфте с увеличением скорости вращения и уменьщением сколь-жения момент не снижается, как в муфтах с массивным якорем, а возрастает, как в асинхронных двигателях с короткозамкнутым ротором, причем прибли-
[c.204]
Размеры зубьев якоря равны размерам зубьев индуктора. В этой муфте с увеличением скорости вращения и уменьщением сколь-жения момент не снижается, как в муфтах с массивным якорем, а возрастает, как в асинхронных двигателях с короткозамкнутым ротором, причем прибли-
[c.204]
У всех электродвигателей, кроме синхронных, момент зависит от скорости вращения ротора. Зависимость Мд (Лд) называется статической механической характеристикой двигателя. На рис. 8.13 изображен примерный вид зависимости Мд (о>д) для наиболее распространенного трехфазного асинхронного двигателя с коротко-замкнутым ротором А и для двигателя постоянного тока с параллельным возбуждением Ш. [c.273]
Рассмотрим схему (рис. 73) самолетного магнитного тахометра с электрическим дистанционным приводом [22]. Первичный преобразователь тахометра представляет собой трехфазный синхронный генератор с ротором в виде постоянного магнита. В обмотке статора синхронного двигателя указателя создается вращающееся магнитное поле, вызывающее вращение ротора, состоящего из постоянного магнита и гистерезисного диска. Постоянный магнит ротора свободно насажен на вал и соединен с ним пружиной, через которую он передает крутящий момент валу. Гистерезисный диск служит для асинхронного запуска синхронного двигателя. Он приводит вал ротора во вращение со скоростью, близкой к синхронной, а затем уже постоянный магнит входит в синхронизм и принимает нагрузку на себя.
[c.242]
Постоянный магнит ротора свободно насажен на вал и соединен с ним пружиной, через которую он передает крутящий момент валу. Гистерезисный диск служит для асинхронного запуска синхронного двигателя. Он приводит вал ротора во вращение со скоростью, близкой к синхронной, а затем уже постоянный магнит входит в синхронизм и принимает нагрузку на себя.
[c.242]
Биения можно наблюдать при работе агрегата, приводимого асинхронным двигателем, если на этот агрегат помимо возмущающей силы от небаланса ротора действует (через фундамент) также возмущающая сила от вибрирующей синхронной машины, у которой скорость вращения ротора равна скорости вращения поля асинхронного двигателя. [c.18]
Система состоит из нерегулируемого асинхронного или синхронного двигателя АД, генератора постоянного тока Г, возбудителя В и двигателя постоянного тока Д, приводящего станок. Двигатель АД присоединяют к сети трехфазного тока, и он вращается непрерывно с приблизительно постоянной скоростью.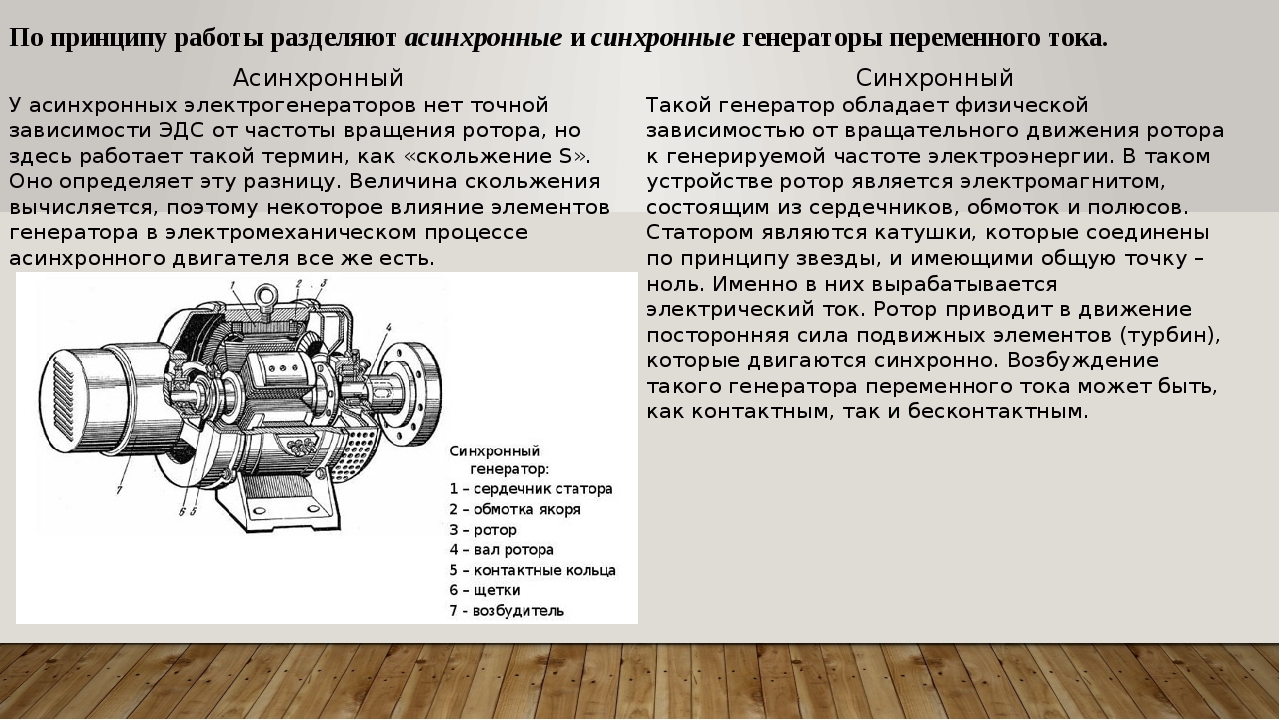 Двигатель АД приводит во вращение генератор постоянного тока Г с независимым возбуждением и возбудитель В, представляющий собой небольшой генератор постоянного тока параллельного или смешанного возбуждения. Двигатель Д имеет независимое возбуждение. Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от возбудителя В. Изменяя реостатом 1 сопротивление цепи возбуждения генератора Г, меняют напряжение,
[c.380]
Двигатель АД приводит во вращение генератор постоянного тока Г с независимым возбуждением и возбудитель В, представляющий собой небольшой генератор постоянного тока параллельного или смешанного возбуждения. Двигатель Д имеет независимое возбуждение. Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от возбудителя В. Изменяя реостатом 1 сопротивление цепи возбуждения генератора Г, меняют напряжение,
[c.380]
По роду тока различают двигатели постоянного тока и двигатели переменного однофазного или трехфазного тока. Электродвигатели переменного тока делятся на синхронные и асинхронные. Синхронные электродвигатели на радиотрансляционных узлах не применяются. Скорость вращения асинхронных электродвигателей на 3— 5% ниже скорости синхронных. Эта разница в скоростях называется скольжением ротора. Величина скольжения зависит от на- [c.54]
Работа электрического тормоза переменного тока основывается на теории электрических машин, из которой известно, что асинхронный двигатель трехфазного переменного тока, приводимый во вращение посторонним (испытуемым) двигателем со скоростью выше синхронной, работает на режиме генератора, создавая тормозной момент на валу ведущего двигателя. Работа асинхронного двигателя
[c.434]
Работа асинхронного двигателя
[c.434]
По мере повьпиения скорости вращения асинхронной машины напряжение на зажимах синхронного двигателя возрастает и достигает полного значения в конце синхронизации. Процесс синхронизации протекает автоматически и длится примерно 80 сек.
[c.640]
Синхронная скорость вращения п .— число оборотов в минуту вращающегося поля асинхронного двигателя, независимое от нагрузки на валу и скорости вращения ротора. Оно определяется только частотой сети f и числом пар полюсов р двигателя [c.222]
Синхронной называется электрическая машина, скорость вращения ротора которой связана постоянным отношением с частотой / сети переменного тока, в которую эта машина включена. Синхронные двигатели рекомендуется применять во всех тех случаях, когда необходим двигатель, работающий при постоянной скорости. У синхронных двигателей КПД несколько выше, а масса на единицу мощности ниже, чем у асинхронных двигателей, рассчитанных на ту же частоту вращения.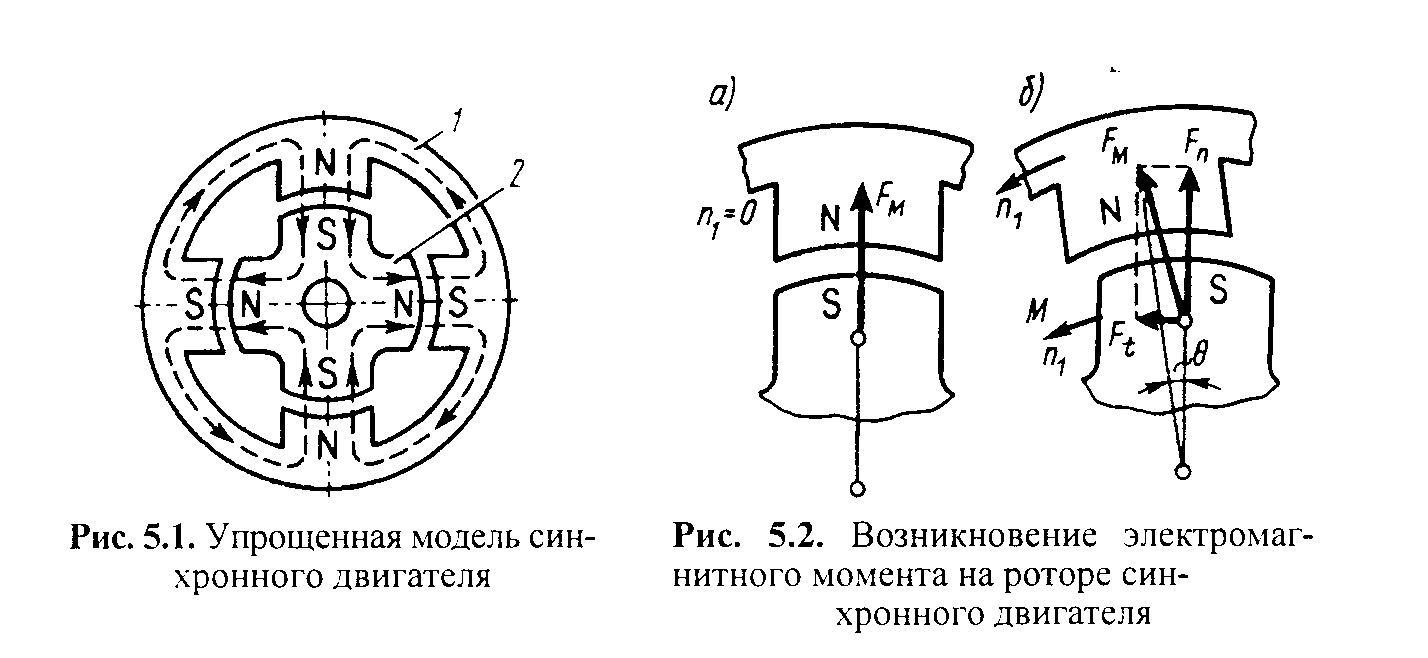 [c.289]
[c.289]
Чтобы подавать на двигатель питание разной частоты, необходим источник питания с регулируемой частотой (синхронный регулятор, частота которого меняется за счет изменения вращения его скорости, асинхронный или ионный преобразователь частоты и т. д.). Скорость вращения двигателя в данном случае можно плавно изменять в широком диапазоне. Получаемые характеристики при различных скоростях вращения имеют одинаковую жесткость. [c.20]
Вращающееся поле, пересекая проводники обмотки ротора, па- Дит (индуктирует) в них электродвижущую силу (э. д. с.), а под ее влиянием в замкнутых проводниках ротора течет переменный ток. Взаимодействие тока в проводниках ротора с вращающимся магнитным полем создает усилие на проводниках или вращающий момент на валу двигателя. Двигатель называется индукционным в соответствии с принципом действия. Асинхронным (или несинхронным) двигателем он назван потому, что при одинаковой (т. е. синхронной) скорости вращения ротора и магнитного поля не будет пересечения полем проводников ротора, не будет индуктироваться э. д. с., не будет тока в проводниках ротора и не будет вращающего усилия на валу ротора. Асинхронный двигатель только тогда развивает момент вращения, когда скорость вращения его ротора будет меньше скорости вращения поля.
[c.73]
д. с., не будет тока в проводниках ротора и не будет вращающего усилия на валу ротора. Асинхронный двигатель только тогда развивает момент вращения, когда скорость вращения его ротора будет меньше скорости вращения поля.
[c.73]
Асинхронный короткозамкнутый двигатель позволяет производить подъем и опускание грузов приблизительно с одинаковыми скоростями и не допускает регулирования скорости. При подъеме полностью загруженного крюка скорость будет на 7—10% ниже синхронной скорости. При опускании порожнего крюка скорость близка к синхронной. При опускании больших грузов скорость будет на 7—10% выше синхронной скорости. В этом случае двигатель работает как генератор. Опускаемый груз будет вращать электродвигатель, а энергия механического вращения — преобразовываться в электрическую, которая поступает в сеть, пока груз двигается вниз. [c.97]
Высокочастотные двигатели. При частоте переменного тока в 50 гц наибольшая скорость асинхронного двигателя составляет 3000 об/мин. В тех случаях, когда для рабочих машин требуются двигатели трёхфазного тока большей скорости, применяются асинхронные двигатели, специально сконструированные на частоту 300—400 гц и выше. При 300 гц двухполюсный асинхронный двигатель даёт 18 000 об/мин. Ток высокой частоты подаётся от специальных синхронных генераторов индукторного типа или от специальных преобразователей частоты. Наиболее часто такой преобразователь представляет собой агрегат, состоящий из обыкновенного асинхронного двигателя и вращаемого им индукционного преобразователя частоты. Последний получается из асинхронной машины, статор которой включён на сеть промышленной частоты, ротор же, вращаемый против поля, питает приёмники высокой частоты. Частота возникающего в роторе тока при вращении его против поля равна
[c.25]
В тех случаях, когда для рабочих машин требуются двигатели трёхфазного тока большей скорости, применяются асинхронные двигатели, специально сконструированные на частоту 300—400 гц и выше. При 300 гц двухполюсный асинхронный двигатель даёт 18 000 об/мин. Ток высокой частоты подаётся от специальных синхронных генераторов индукторного типа или от специальных преобразователей частоты. Наиболее часто такой преобразователь представляет собой агрегат, состоящий из обыкновенного асинхронного двигателя и вращаемого им индукционного преобразователя частоты. Последний получается из асинхронной машины, статор которой включён на сеть промышленной частоты, ротор же, вращаемый против поля, питает приёмники высокой частоты. Частота возникающего в роторе тока при вращении его против поля равна
[c.25]
На рис. 299 показана механическая характеристика асинхронного электродвигателя трехфазного тока. Механическая характеристика Мд = -Мд( ) асинхронного электродвигателя состоит из двух частей первая — восходящая, неустойчивая — часть Оа расположена левее Мтах вторая — устойчивая — часть аЬ — правее.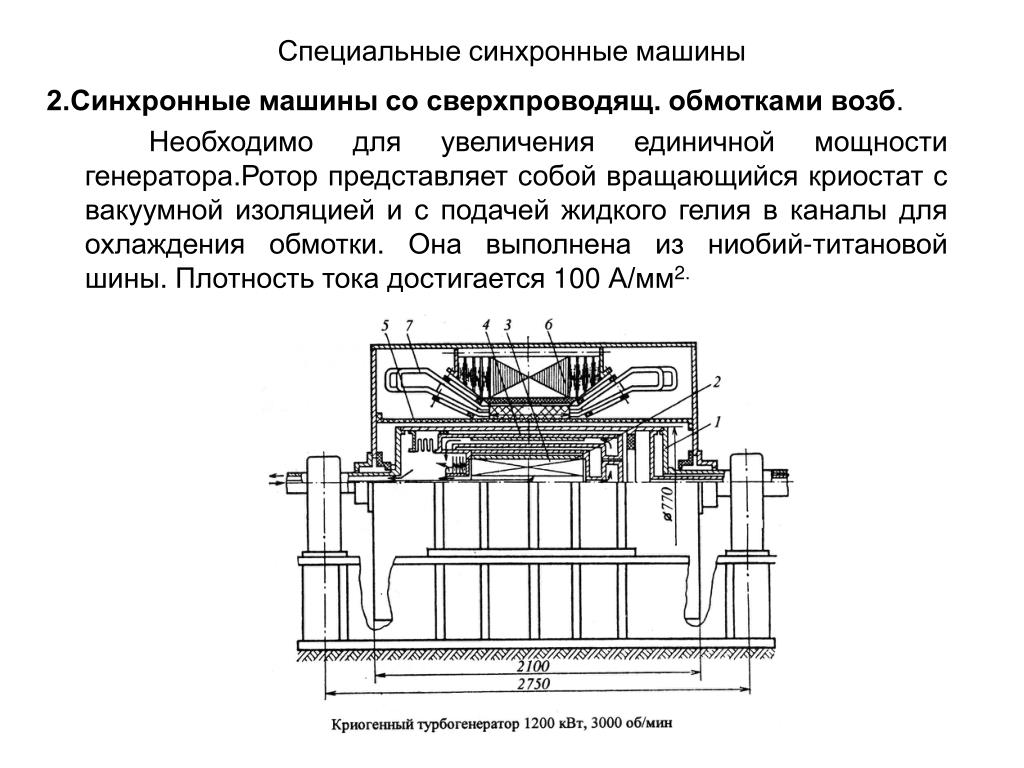 Часть аЬ — рабочая. При некотором значении угловой скорости со, соответствующей номинальному моменту М двигателя и номинальной скорости Шн двигатель развивает максимальную мощность. Угловую скорость СОс, при которой Мд = О, называют синхронной с этой скоростью ротор вращается при холостом ходе. Точка а диаграммы определяет положение максимального опрокидываюихего момента Мщах и минимально допустимой угловой скорости (Omin рабочей части характеристики, а точка О определяет начальный пусковой момент Mq при нулевой угловой скорости ротора. Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются.
[c.205]
Часть аЬ — рабочая. При некотором значении угловой скорости со, соответствующей номинальному моменту М двигателя и номинальной скорости Шн двигатель развивает максимальную мощность. Угловую скорость СОс, при которой Мд = О, называют синхронной с этой скоростью ротор вращается при холостом ходе. Точка а диаграммы определяет положение максимального опрокидываюихего момента Мщах и минимально допустимой угловой скорости (Omin рабочей части характеристики, а точка О определяет начальный пусковой момент Mq при нулевой угловой скорости ротора. Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются.
[c.205]
Обш,ие сведения. Трёхфазные асинхронные двигатели являются наиболее распространённым типом электродвигателей. Асинхронный двигатель состоит из неподвижного статора и вращающегося ротора. Статор асинхронного двигателя конструктивно аналогичен статору синхронной машины. Ротор — цилиндрическое тело из листовой динамной стали с обмоткой, уложенной в пазы, выштампованные на наружной поверхности. При питании обмотки статора трёхфазным током она создаёт в воздушном промежутке вращающееся магнитное поле. Число полюсов этого поля определяется типом обмотки. Скорость вращения поля или синхронная скорость
[c.536]
При питании обмотки статора трёхфазным током она создаёт в воздушном промежутке вращающееся магнитное поле. Число полюсов этого поля определяется типом обмотки. Скорость вращения поля или синхронная скорость
[c.536]
При стандартной частоте сети fj = = 50 гц, с — асинхронных двигателей имеет значения 3000, 1500, 1000, 750, 600, 500 oojMUH и т. д. Номинальная скорость вращения асинхронного двигателя на 2—8% ниже синхронной.
[c.122]
Многоскоростные асинхронные двигатели с регулированием частоты вращения путем изменения пар полюсов нашли применение преимущественно в приводе главного движения с отношением двух синхронных скоростей вращения 1 2 (500/1000, 750/1500 и 1500/3000 об/мин). Трехскоростные и четырехскоростные двигатели встречаются в приводах станков значительно реже. Асинхронные двигатели с регулируемой частотой пока используют лишь в быстроходном приводе небольшой мощности, но по мере совершенствования преобразователей частоты можно предполагать значительное расширение области применения двигателей этого типа в станках. [c.64]
[c.64]
Обычные способы пуска в ход. К этим способам принадлежат следующие виды пуска в ход С. д. 1) при помощи машины, сцепленной с С. д., 2) посредством постороннего двигателя. 1) Если С. д. связан напр, с машиной постоянного тока, то агрегат м. б. пущен со стороны постоянного тока от аккумуляторной ба-тереи или какого-либо другого источника энергии. В этом случае машина постоянного тока приводится во вращение, как двигатель,и, когда скорость вращения достигает синхронной, возбуждают синхронный двигатель присоединение С. д. параллельно к сети переменного тока производится обычным путем, после того как достигнуты синхронизм и полное совпадение фаз напряжения. После присоединения С. л. к сети машина постоянного тока из двигателя переводится в генератор посредством соответствующей регулировки возбуждения. В некоторых случаях в качестве пускового двигателя м. б. использован возбудитель С. д., если мощность этого возбудителя достаточна для этих целей. 2) Часто случается, что С. д. приходится одному работать на привод и не всегда налицо источник постоянного тока, при помощи к-рого можно запустить в качестве двигателя машину постоянного тока, связанную с С. д. тогда для пуска в ход С. д. применяют асинхронный двигатель, причем ротор пускового асинхронного двигателя снабжается короткозамкнутой обмоткой или обмоткой в виде беличьего колеса. Сущность способа пуска в ход при помощи асинхронного двигателя заключается в следующем пусковой асинхронный двигатель, имеющий обычно на два, а иногда на четыре полюса меньше, механически связывается с С. д. Вследствие меньшего числа полюсов асинхронный двигатель может привести во вращение синхронную невозбужденную машину со скоростью выше номинальной. При возбуждении С. д. асинхронный двигатель нагружается, скорость вращения ротора начинает падать, пока скорость вращения С. д. не станет равной синхронной скорости, и при наступлении этого улавливается наиболее благоприятный момент для параллельного включения двигателя к сети. Пусковые двигатели с беличьим колесом не всегда удобны по той причине, что если-момент синхронизма пропущен, то прежде всего нужно охладить беличье колесо и лишь затем приступить к вторичному пуску.
д. приходится одному работать на привод и не всегда налицо источник постоянного тока, при помощи к-рого можно запустить в качестве двигателя машину постоянного тока, связанную с С. д. тогда для пуска в ход С. д. применяют асинхронный двигатель, причем ротор пускового асинхронного двигателя снабжается короткозамкнутой обмоткой или обмоткой в виде беличьего колеса. Сущность способа пуска в ход при помощи асинхронного двигателя заключается в следующем пусковой асинхронный двигатель, имеющий обычно на два, а иногда на четыре полюса меньше, механически связывается с С. д. Вследствие меньшего числа полюсов асинхронный двигатель может привести во вращение синхронную невозбужденную машину со скоростью выше номинальной. При возбуждении С. д. асинхронный двигатель нагружается, скорость вращения ротора начинает падать, пока скорость вращения С. д. не станет равной синхронной скорости, и при наступлении этого улавливается наиболее благоприятный момент для параллельного включения двигателя к сети. Пусковые двигатели с беличьим колесом не всегда удобны по той причине, что если-момент синхронизма пропущен, то прежде всего нужно охладить беличье колесо и лишь затем приступить к вторичному пуску.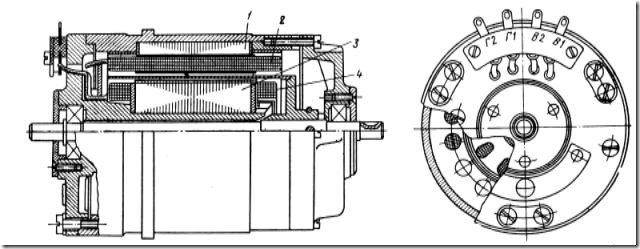 Затем не всегда возможно хорошо рассчитать беличье колесо на том основании, что потери холостого хода С. д. со временем меняются. Поэтому иногда приходится исправлять беличье колесо, удаляя несколько стержней или подпиливая соединительное кольцо. Если ротор пускового двигателя снабжен обмоткой, то в некоторых случаях для получения более надежной синхронизации в цепь обмотки ротора вводят реостат, к-рый конечно усложняет и удорожает всю установку. Пусковой ток при пуске в ход асинхронным двигателем составляет 30— 40 % номинального тока С.д. Период пуска длится 5—7 мин., а иногда и более. Мощность пускового двигателя составляет ок. 10% номинальной мощности С. д., если последний запускает ся вхолостую. Если синхронный двигатель приводит в действие насос или компрессор, то пусковой вращающий момент должен быть значителен, что ведет к увеличению пускового двигателя и затруднению самого пуска в ход.
[c.428]
Затем не всегда возможно хорошо рассчитать беличье колесо на том основании, что потери холостого хода С. д. со временем меняются. Поэтому иногда приходится исправлять беличье колесо, удаляя несколько стержней или подпиливая соединительное кольцо. Если ротор пускового двигателя снабжен обмоткой, то в некоторых случаях для получения более надежной синхронизации в цепь обмотки ротора вводят реостат, к-рый конечно усложняет и удорожает всю установку. Пусковой ток при пуске в ход асинхронным двигателем составляет 30— 40 % номинального тока С.д. Период пуска длится 5—7 мин., а иногда и более. Мощность пускового двигателя составляет ок. 10% номинальной мощности С. д., если последний запускает ся вхолостую. Если синхронный двигатель приводит в действие насос или компрессор, то пусковой вращающий момент должен быть значителен, что ведет к увеличению пускового двигателя и затруднению самого пуска в ход.
[c.428]
С увеличением скорости электровоза скорость вращения асинхронной машины уменьшается до полной остановки. При этом магнитное поле машины МЛ в статоре и роторе вращается с одинаковой скоростью и вторичная частота становится равной 50 гц. При этом асинхронная машина МА- действует как статический трансформатор. Создаваемый машиной А1А вращающий момент уравновешивается неподнижным двигателем МС. Энергия, необходимая для уравновешивания вращак1щего момента, обеспечивается машиной ОС, режим которой перед этим уже изменился на генераторный. Напряжение машины ОС невелико, но достаточно для покрытия омических потерь в машине МС. Мощность около 80 квт обеспечивается синхронной машиной М3, которая переходит на двигательный режим.
[c.640]
При этом магнитное поле машины МЛ в статоре и роторе вращается с одинаковой скоростью и вторичная частота становится равной 50 гц. При этом асинхронная машина МА- действует как статический трансформатор. Создаваемый машиной А1А вращающий момент уравновешивается неподнижным двигателем МС. Энергия, необходимая для уравновешивания вращак1щего момента, обеспечивается машиной ОС, режим которой перед этим уже изменился на генераторный. Напряжение машины ОС невелико, но достаточно для покрытия омических потерь в машине МС. Мощность около 80 квт обеспечивается синхронной машиной М3, которая переходит на двигательный режим.
[c.640]
Наиболее распространенными способами торможения являются сверхсинхронное и противовключением. Сверхсинхронное торможение с отдачей энергии в сеть возникает, когда двигатель под влиянием нагрузки повышает свою скорость сверх синхронной оно применимо лишь в условиях вращения двигателя со скоростью выше синхронной и не может быть использовано при исчезновении напряжения в сети. Торможение асинхронного двигателя противовключением возникает при включении его по нормальной схеме реверса, а также если двигатель, включенный на подъем, не может из-за недостаточности развиваемого момента преодолеть момент, создаваемый грузом, и вместо подъема происходит спуск груза.
[c.136]
Торможение асинхронного двигателя противовключением возникает при включении его по нормальной схеме реверса, а также если двигатель, включенный на подъем, не может из-за недостаточности развиваемого момента преодолеть момент, создаваемый грузом, и вместо подъема происходит спуск груза.
[c.136]
Особые требования предъявляются к приводам перемещений в случае контурной объемной системы управления. Такой привод используется в устройстве правки ведущего круга бесцентрового круглошлифовального станка, работающего напроход при двух-, трехкоординатной микропроцессорной системе ЧПУ N , формирующей профили на круге. УЧПУ должно сформировать сигналы управления практически безынерционно при условии, что частоты вращения ведущего круга растут. Хотя скорости правки ведущего круга относительно небольшие (порядка 100 мм/мин), динамические и статистические показатели привода должны обеспечить высокую точность движения правящего алмаза по осям координат. Поэтому рекомендуется следящий привод с высокомомент-ным двигателем постоянного тока либо применение вентильных двигателей и привода с синхронными либо асинхронными двигателями. [c.49]
[c.49]
Скорость вращения ротора не может достлгнуть скорости вращения магнитного поля, так как в этом случае не было бы движения проводников ротора относительно магнитного поля, а следовательно, в них не было бы и тока. Так как ротор несколько отстаёт от магнитного поля, т. е. двигается с ним не синхронно, двигатель и называется асинхронным, что значит несинхронный. [c.410]
Синхронный и асинхронный двигатель: отличия, принцип работы, использование
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.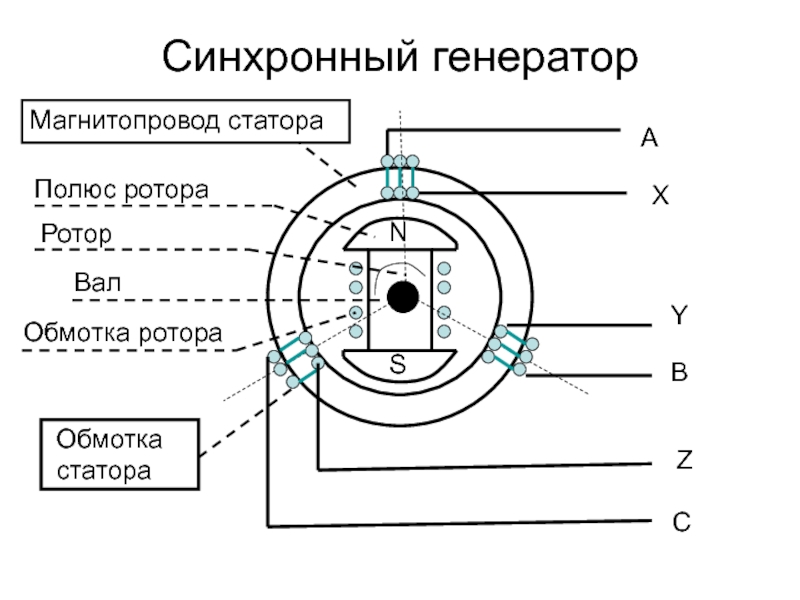
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.

Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.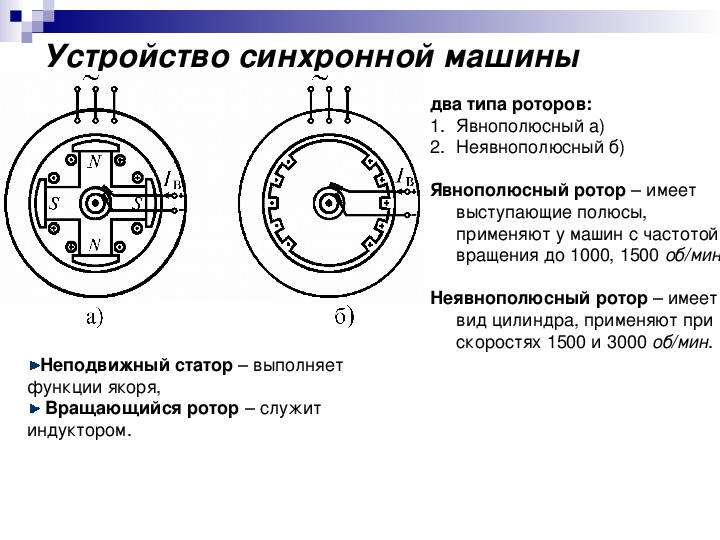
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)
Электродвигатели — это машины, преобразующие электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и принцип их работы. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, связанную с работой однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока?
Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу действия магнитного поля на проводник с током, который испытывает механическую силу.Где статор создает статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея RMF вращательного магнитного поля. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче на вход переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток либо за счет индукции, либо от внешнего источника тока, создающего собственное магнитное поле.Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью вращения ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или есть разница между скоростью вращения поля статора и ротора, двигатель называется асинхронным двигателем. Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Похожие сообщения:
Синхронный двигатель
Как следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его статор, вращающий магнитное поле, называемое синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока.Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с использованием внешнего источника постоянного тока через токосъемные кольца или постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных или кратных полюсам статора. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется вращательным магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не сразу запускается на синхронной скорости (вращательное магнитное поле).Поэтому для обеспечения пускового крутящего момента используется дополнительная обмотка под названием « демпферная обмотка ». Он действует как асинхронный двигатель во время запуска. Таким образом, это говорит о том, что синхронные двигатели не являются самозапускающимися , им нужен дополнительный пусковой механизм.
Это может быть двигатель с независимым или невозбужденным возбуждением, т.е. первый требует отдельного источника постоянного тока, питает обмотки ротора и создает магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты сети и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменить частоту питания.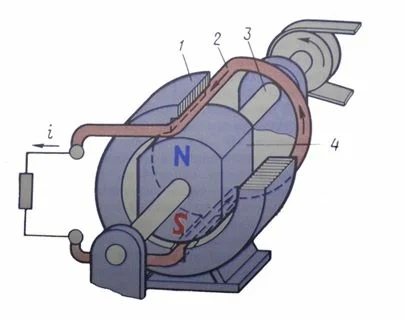 Это достигается с помощью VFD (частотно-регулируемый привод).
Это достигается с помощью VFD (частотно-регулируемый привод).
Похожие сообщения:
Асинхронный двигатель
Название асинхронного двигателя предполагает, что скорость вращения ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора.
Ротор асинхронного двигателя представляет собой либо короткозамкнутый ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на концах с помощью проводящего кольца, которое электрически замыкает их друг на друга. Ротор витого типа состоит из нескольких обмоток поверх стального многослойного сердечника.
Вращающееся магнитное поле статора вызывает индукционный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его создает, и пытается устранить ее, догоняя скорость RMF статора (синхронная скорость). При этом ротор вращается в направлении RMF статора. Поскольку он работает по принципу индукции, поэтому асинхронный двигатель также известен как асинхронный двигатель .
Асинхронный двигатель никогда не может работать на синхронной скорости, он всегда медленнее синхронной скорости и зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если, в случае, если он работает на синхронной скорости, это означает, что ротор магнитно заблокирован, и между статором и полем ротора нет разницы. Следовательно, не было бы магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать на более низкой скорости, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет индуцированному току протекать через медные стержни. В то время как ротор с обмоткой позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Моторном пускателе». Смысл в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое зависит от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанная запись:
Различия между синхронным двигателем и асинхронным двигателем
В следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель представляет собой тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это двигатель переменного тока, который работает на скорости ниже синхронной. |
| Работает по принципу магнитной блокировки между полем ротора и статора. | Работает по принципу электромагнитной индукции между статором и ротором. |
| Скольжение отсутствует т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе имеется скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты сети и количества полюсов статора. Н с = 120 ф / Р | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1-с) N < N с |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели запускаются самостоятельно и не требуют дополнительного механизма. |
| Для ротора требуется дополнительный источник тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронный двигатель с независимым возбуждением требует дополнительного источника постоянного тока для питания обмотки ротора. | Не требует дополнительного источника. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Не требует токосъемных колец, однако в витом типе можно использовать токосъемные кольца для контроля скорости. |
| Скорость двигателя регулируется только путем изменения частоты питания через ЧРП. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств ЧРП. |
| Подача входного напряжения не влияет на скорость или крутящий момент синхронного двигателя. | Подача входного напряжения может использоваться для изменения крутящего момента и скорости двигателя. |
| Колебания сетевого напряжения не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Первоначальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Это операция сложная. | Это операция проста и удобна для пользователя. |
| If обеспечивает высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью ЧРП. | Довольно сложно работать на низкой скорости. |
| Лучше всего работает при низкой скорости, обычно ниже 300 об/мин. | Лучше всего подходит для работы на скорости выше 600 об/мин. |
| Может работать с отстающим, опережающим или единичным коэффициентом мощности путем регулировки возбуждения. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в опережающем коэффициенте мощности. | Его нельзя использовать для коррекции коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, внезапные изменения нагрузки вызовут колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но более дороги и используются для сверхнизких оборотов, предлагая функцию коррекции коэффициента мощности.С другой стороны, асинхронные двигатели используются для высоких оборотов с переменной скоростью, они недороги и просты в эксплуатации.
Связанный пост об электрических двигателях.
синхронных двигателей | Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели
доступны в небольших размерах для приложений, требующих точной синхронизации, таких как хронометраж (часы) и магнитофоны. Хотя кварцевые часы с батарейным питанием широко доступны, часы с питанием от сети переменного тока имеют лучшую долгосрочную точность — в течение нескольких месяцев.
Это связано с тем, что операторы электростанций намеренно поддерживают долговременную точность частоты системы распределения переменного тока. Если он отстанет на несколько циклов, они восполнят потерянные циклы переменного тока, так что часы не потеряют время.
Большие и малые синхронные двигатели
Более 10 лошадиных сил (10 кВт) более высокий КПД и ведущий коэффициент мощности делают большие синхронные двигатели полезными в промышленности. Большие синхронные двигатели на несколько процентов более эффективны, чем более распространенные асинхронные двигатели, хотя синхронный двигатель более сложен.
Поскольку моторы и генераторы похожи по конструкции, должна быть возможность использовать генератор в качестве мотора и, наоборот, использовать мотор в качестве генератора.
Асинхронный двигатель похож на генератор переменного тока с вращающимся полем. На рисунке ниже показаны небольшие генераторы переменного тока с вращающимся полем постоянного магнита. На приведенном ниже рисунке могут быть либо два параллельно включенных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, либо генератор переменного тока, приводящий в движение синхронный двигатель. Или это могут быть два мотора, если будет подключен внешний источник питания.
Дело в том, что в любом случае роторы должны работать на одной номинальной частоте и находиться в фазе друг с другом. То есть они должны быть синхронизированы . Процедура синхронизации двух генераторов состоит в том, чтобы (1) разомкнуть выключатель, (2) запустить оба генератора с одинаковой частотой вращения, (3) опережать или замедлять фазу одного генератора до тех пор, пока оба выхода переменного тока не совпадут по фазе, (4) замкнуть переключатель до того, как они сдвинутся по фазе.
После синхронизации генераторы будут заблокированы друг относительно друга, что потребует значительного крутящего момента, чтобы отсоединить один блок (рассинхронизировать) от другого.
Синхронный двигатель, работающий синхронно с генератором
Учет крутящего момента синхронных двигателей
Если к ротору одного из вышеперечисленных вращающихся генераторов приложен больший крутящий момент в направлении вращения, угол ротора будет опережать (в отличие от (3)) по отношению к магнитному полю в катушках статора, все еще синхронизируясь и ротор будет подавать энергию в линию переменного тока, как генератор переменного тока.
Ротор также будет сдвинут относительно ротора другого генератора. Если к одному из вышеперечисленных устройств приложена нагрузка, такая как тормоз, угол ротора будет отставать от поля статора, как в (3), извлекая энергию из линии переменного тока, как двигатель.
Если применяется чрезмерный крутящий момент или сопротивление, ротор превысит максимальный угол крутящего момента опережения или отставания настолько, что синхронизация будет потеряна. Крутящий момент развивается только при сохранении синхронизации двигателя.
Увеличение скорости синхронных двигателей
В случае использования небольшого синхронного двигателя вместо генератора переменного тока нет необходимости выполнять сложную процедуру синхронизации генераторов переменного тока. Однако синхронный двигатель не запускается самостоятельно, и его необходимо довести до приблизительной электрической скорости генератора, прежде чем он заблокируется (синхронизируется) со скоростью вращения генератора.
После набора скорости синхронный двигатель будет поддерживать синхронность с источником питания переменного тока и развивать крутящий момент.
Синусоидальный синхронный двигатель
Предполагая, что скорость двигателя достигает синхронной, когда синусоида меняется на положительную на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, а верхняя южная катушка притягивает северный полюс ротора. Аналогичным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке.
К тому времени, когда синусоида достигает пика в точке (2), крутящий момент, удерживающий северный полюс ротора, достигает максимума.Этот крутящий момент уменьшается по мере того, как синусоида уменьшается до 0 В постоянного тока в точке (3) при минимальном крутящем моменте.
Когда синусоида меняется на отрицательную между (3 и 4), нижняя южная катушка толкает южный полюс ротора, притягивая при этом северный полюс ротора. Аналогичным образом северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. В (4) синусоида достигает отрицательного пика с удерживающим моментом снова на максимуме. Когда синусоида меняется с отрицательной на 0 В постоянного тока на положительную, процесс повторяется для нового цикла синусоиды.
Обратите внимание: на приведенном выше рисунке показано положение ротора при отсутствии нагрузки (α=0°). На практике нагрузка на ротор приводит к тому, что ротор отстает от положения, показанного углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не будет достигнут при α=90°.
Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует при изменении полярности.
Если скорость ротора с постоянными магнитами близка к частоте этого чередования, он синхронизируется с этим чередованием.Поскольку поле катушки пульсирует и не вращается, необходимо довести скорость ротора с постоянными магнитами до нужной скорости с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, подобный тем, что описаны в следующем разделе.
Добавление полюсов поля снижает скорость
2-полюсный (пара полюсов север-юг) генератор переменного тока будет генерировать синусоидальный сигнал частотой 60 Гц при вращении со скоростью 3600 об/мин (оборотов в минуту). 3600 об/мин соответствует 60 оборотам в секунду.Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об/мин.
Двигатель с более низкой скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель будет вращаться со скоростью 1800 об/мин, 12-полюсный — со скоростью 600 об/мин. Показанный стиль конструкции (рисунок выше) приведен для иллюстрации. Синхронные двигатели с многополюсным статором с более высоким КПД и большим крутящим моментом фактически имеют несколько полюсов в роторе.
Однообмоточный 12-полюсный синхронный двигатель
Вместо того, чтобы наматывать 12 катушек для 12-полюсного двигателя, намотайте одну катушку с двенадцатью встречно расположенными стальными полюсами, как показано на рисунке выше.Хотя полярность катушки меняется из-за приложенного переменного тока, предположим, что верхняя часть временно находится на севере, а нижняя — на юге.
Полюсные наконечники направляют южный поток снизу и снаружи катушки вверх. Эти 6 южных чередуются с 6 южными выступами, отогнутыми вверх от вершины стального полюсного наконечника катушки. Таким образом, стержень ротора с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6 циклам переменного тока за один физический оборот стержневого магнита.
Скорость вращения будет составлять 1/6 от электрической скорости переменного тока.Скорость ротора будет составлять 1/6 скорости вращения 2-полюсного синхронного двигателя. Пример: 60 Гц будет вращать 2-полюсный двигатель со скоростью 3600 об/мин или 600 об/мин для 12-полюсного двигателя.
Перепечатано с разрешения Westclox History на сайте www.clockHistory.com
Статор (рисунок выше) показывает 12-полюсный синхронный двигатель Westclox. Конструкция аналогична предыдущей фигуре с одной катушкой. Конструкция с одной катушкой экономична для двигателей с низким крутящим моментом.Этот двигатель со скоростью вращения 600 об/мин приводит в движение редукторы, двигающие стрелки часов.
В: Если бы двигатель Westclox работал со скоростью 600 об/мин от источника питания с частотой 50 Гц, сколько полюсов потребовалось бы?
A: 10-полюсный двигатель будет иметь 5 пар полюсов N-S. Он будет вращаться со скоростью 50/5 = 10 оборотов в секунду или 600 об/мин (10 с-1 х 60 с/мин).
Перепечатано с разрешения Westclox History на сайте www.clockHistory.com
Ротор (рис. выше) состоит из стержня с постоянными магнитами и стальной чашки асинхронного двигателя.Стержень синхронного двигателя, вращающийся внутри лепестков полюса, сохраняет точное время. Чашка асинхронного двигателя снаружи стержневого магнита устанавливается снаружи и над выступами для самостоятельного запуска. Одно время выпускались несамозапускающиеся двигатели без асинхронного двигателя.
Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, как показано на рисунке ниже, создает электрически вращающееся поле в статоре. Такие двигатели не запускаются самостоятельно, если они запускаются от источника питания с фиксированной частотой, такой как 50 или 60 Гц, как в промышленных условиях.
Кроме того, ротор является не постоянным магнитом для двигателей мощностью в несколько лошадиных сил (несколько киловатт), используемых в промышленности, а электромагнитом. Большие промышленные синхронные двигатели более эффективны, чем асинхронные двигатели. Они используются, когда требуется постоянная скорость. Имея опережающий коэффициент мощности, они могут скорректировать линию переменного тока на отстающий коэффициент мощности.
Три фазы возбуждения статора векторно складываются для создания единого результирующего магнитного поля, которое вращается f/2n раз в секунду, где f — частота сети питания, 50 или 60 Гц для промышленных двигателей, работающих от сети питания.Количество полюсов равно n. Для частоты вращения ротора в об/мин умножьте на 60.
S = f120/n, где: S = скорость ротора в об/мин f = частота сети переменного тока n = количество полюсов на фазу
3-фазный 4-полюсный (на каждую фазу) синхронный двигатель будет вращаться со скоростью 1800 об/мин при мощности 60 Гц или 1500 об/мин при мощности 50 Гц. Если катушки запитываются по одной в последовательности φ-1, φ-2, φ-3, то ротор должен поочередно указывать на соответствующие полюса.
Поскольку синусоидальные волны на самом деле перекрываются, результирующее поле будет вращаться не ступенчато, а плавно.Например, когда синусоидальные волны φ-1 и φ-2 совпадают, пик поля будет направлен между этими полюсами. Показанный стержневой магнитный ротор подходит только для небольших двигателей.
Ротор с несколькими магнитными полюсами (внизу справа) используется в любом эффективном двигателе, приводящем в движение значительную нагрузку. Это будут электромагниты с токосъемными кольцами в больших промышленных двигателях. Крупные промышленные синхронные двигатели запускаются автоматически с помощью встроенных в якорь проводников с короткозамкнутым ротором, действующих как асинхронный двигатель.
На электромагнитный якорь подается питание только после того, как ротор будет доведен до скорости, близкой к синхронной.
Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели
Небольшие многофазные синхронные двигатели можно запускать путем линейного увеличения частоты привода от нуля до конечной рабочей частоты. Многофазные управляющие сигналы генерируются электронными схемами и будут прямоугольными во всех приложениях, кроме самых требовательных.
Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными сигналами. Можно использовать двух- или трехфазный привод, поставив соответствующее количество обмоток в статоре. Выше показано только 3 фазы.
Электронный синхронный двигатель
На блок-схеме показана электроника привода, связанная с низковольтным (12 В пост. тока) синхронным двигателем. Эти двигатели имеют встроенный в двигатель датчик положения , который выдает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя.
Датчик положения может быть таким же простым, как полупроводниковые датчики магнитного поля, такие как устройства на эффекте Холла , обеспечивающие синхронизацию коммутации (направление тока якоря) с электроникой привода. Датчик положения может быть угловым датчиком с высоким разрешением, например резольвером, индуктосином (магнитным энкодером) или оптическим энкодером.
Если требуется постоянная и точная скорость вращения, (как для дисковода) могут быть включены тахометр и фазовая автоподстройка частоты (рисунок ниже).Этот сигнал тахометра, последовательность импульсов, пропорциональная скорости двигателя, подается обратно в контур фазовой автоподстройки частоты, который сравнивает частоту и фазу тахометра со стабильным источником опорной частоты, таким как кварцевый генератор.
Контур фазовой автоподстройки частоты управляет скоростью синхронного двигателя
Бесщеточный двигатель постоянного тока
Двигатель, приводимый в действие прямоугольными волнами тока, обеспечиваемый простыми датчиками на эффекте Холла, известен как бесщеточный двигатель постоянного тока .Этот тип двигателя имеет большее изменение пульсирующего крутящего момента в зависимости от оборота вала, чем двигатель с синусоидальным приводом. Для многих приложений это не проблема. Хотя в этом разделе нас в первую очередь интересуют синхронные двигатели.
Пульсирующий крутящий момент двигателя и механический аналог
Пульсирующий крутящий момент или зубчатое зацепление вызвано магнитным притяжением полюсов ротора к полюсным наконечникам статора. (Рисунок выше) Обратите внимание, что катушки статора отсутствуют.Ротор PM можно вращать вручную, но он будет испытывать притяжение к полюсным наконечникам, когда находится рядом с ними.
Это аналогично механической ситуации. Будет ли пульсация крутящего момента проблемой для двигателя, используемого в магнитофоне? Да, мы не хотим, чтобы двигатель попеременно ускорялся и замедлялся, когда он перемещает аудиоленту мимо головки воспроизведения ленты. Будет ли пульсация крутящего момента проблемой для двигателя вентилятора? №
Обмотки, распределенные по ремню, создают более синусоидальное поле
Если двигатель приводится в действие синусоидальными волнами тока, синхронными с противо-ЭДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли формы сигналов привода электронными средствами.Синхронный двигатель будет генерировать синусоидальную обратную ЭДС , если магнитное поле статора имеет синусоидальное распределение.
Это будет более синусоидально, если полюсные обмотки будут распределены в ремне по многим пазам, а не сосредоточены на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Такая компоновка подавляет многие нечетные гармоники поля статора.
Пазы с меньшим количеством витков на краю фазной обмотки могут находиться в одном пространстве с другими фазами.Намоточные ремни могут иметь альтернативную концентрическую форму, как показано на рисунке ниже.
Концентрические ремни
Для двухфазного двигателя, приводимого в движение синусоидой, крутящий момент остается постоянным на протяжении всего оборота по тригонометрическому тождеству:
sin2θ + cos2θ = 1
Генерация и синхронизация сигнала возбуждения требуют более точной индикации положения ротора, чем обеспечивают датчики Холла, используемые в бесщеточных двигателях постоянного тока.Резольвер или оптический или магнитный энкодер обеспечивает разрешение от сотен до тысяч частей (импульсов) на оборот.
Резольвер выдает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Энкодеры обеспечивают цифровую индикацию углового положения в последовательном или параллельном формате.
Привод синусоидальной волны на самом деле может быть от ШИМ, широтно-импульсного модулятора , высокоэффективного метода аппроксимации синусоидальной волны цифровой формой волны.Для каждой фазы требуется электроника привода для этой формы волны, сдвинутая по фазе на соответствующую величину для каждой фазы.
ШИМ приближается к синусоиде
Преимущества синхронного двигателя
КПД синхронного двигателя выше, чем у асинхронных двигателей. Синхронный двигатель также может быть меньше, особенно если в роторе используются постоянные магниты высокой энергии. Появление современной твердотельной электроники позволяет управлять этими двигателями с переменной скоростью.
Асинхронные двигатели в основном используются в железнодорожной тяге. Однако небольшой синхронный двигатель, устанавливаемый внутри ведущего колеса, делает его привлекательным для таких применений. Версия этого двигателя с высокотемпературным сверхпроводником весит от одной пятой до одной трети веса двигателя с медной обмоткой.
Самый большой экспериментальный сверхпроводниковый синхронный двигатель, способный привести в движение корабль класса морского эсминца. Во всех этих применениях электропривод с регулируемой скоростью необходим.Привод с регулируемой скоростью также должен снижать напряжение привода на низкой скорости из-за уменьшения индуктивного сопротивления на более низкой частоте.
Чтобы развить максимальный крутящий момент, ротор должен отставать от направления поля статора на 90°. Более того, он теряет синхронизацию. Гораздо меньше приводит к снижению крутящего момента. Таким образом, положение ротора должно быть точно известно. А положение ротора по отношению к полю статора необходимо рассчитывать и контролировать.
Этот тип управления известен как векторное фазовое управление .Он реализован с помощью быстрого микропроцессора, управляющего широтно-импульсным модулятором фаз статора. Статор синхронного двигателя такой же, как у более популярного асинхронного двигателя.
В результате электронное управление скоростью промышленного класса, используемое с асинхронными двигателями, также применимо к большим промышленным синхронным двигателям. Если ротор и статор обычного вращающегося синхронного двигателя развернуть, получится синхронный линейный двигатель.
Этот тип двигателя применяется для точного высокоскоростного линейного позиционирования.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
Что такое двигатель переменного тока и как он появился?
Во-первых, краткая история.
Двигатель переменного тока, который сейчас находится на вашем заводе, имеет долгую и легендарную историю, которая восходит к открытию Майкла Фарадея в 1830 году о том, что изменяющееся магнитное поле может индуцировать электрический ток в цепи. Пятьдесят восемь лет спустя это открытие привело к получению Николой Теслой в 1888 году патента на первый многофазный асинхронный двигатель переменного тока без коллектора.
Что такое двигатель переменного тока?
На самом базовом уровне ваш двигатель переменного тока представляет собой электродвигатель, приводимый в действие переменным током (AC). Обычно он состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и внутреннего ротора, прикрепленного к выходному валу, который создает второе вращающееся магнитное поле. Магнитное поле, создаваемое переменным током, — это то, что вращает вал двигателя, который «в свою очередь» производит механическую энергию двигателя, которая облегчает любое функциональное назначение двигателя в вашей рабочей среде.
Каковы основные типы двигателей переменного тока?
Двумя наиболее распространенными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели.
- Если у вас есть асинхронный двигатель (или асинхронный двигатель), он всегда зависит от небольшой разницы в скорости между вращающимся магнитным полем статора и скоростью вала ротора (называемой скольжением), чтобы индуцировать ток ротора в обмотке переменного тока ротора. В результате ваш асинхронный двигатель не может создавать крутящий момент вблизи синхронной скорости, когда индукция (или скольжение) не имеет значения или перестает существовать.
- В отличие от этого, синхронный двигатель на вашем заводе или объекте не зависит от индукции скольжения для работы и использует либо постоянные магниты, явные полюса (имеющие выступающие магнитные полюса), либо обмотку ротора с независимым возбуждением. Синхронный двигатель развивает свой номинальный крутящий момент точно на синхронной скорости.
Другие типы двигателей включают вихретоковые двигатели и механически коммутируемые машины переменного и постоянного тока, в которых скорость зависит от напряжения и соединения обмоток.
Как определяется скорость двигателя?
Скорость вашего двигателя переменного тока определяется главным образом частотой сети переменного тока и количеством полюсов в обмотке статора. Эта скорость выводится из общей формулы, включающей переменные, включающие синхронную скорость (в об/мин), частоту сети переменного тока и количество полюсов на фазную обмотку.
Получается, что фактическая скорость вращения вашего асинхронного двигателя будет меньше его расчетной синхронной скорости на величину, известную как скольжение (см. выше), которая увеличивается с создаваемым крутящим моментом.Без нагрузки скорость вашего двигателя будет очень близка к синхронной. Под нагрузкой стандартный двигатель может иметь скольжение от 2 до 3%, а специальные двигатели могут иметь скольжение до 7%.
Вам нужен двигатель переменного тока или его нужно отремонтировать?
В RSAW мы используем практический консультативный подход, при котором личный менеджер проекта информирует вас, если мы считаем, что ремонт или замена двигателя является вашим лучшим следующим шагом. Мы ремонтируем двигатели до 40 тонн, диаметром 144 дюйма и напряжением 13 800 вольт.У нас также есть новые двигатели Baldor/Reliance и Toshiba мощностью до 2000 лошадиных сил, которые готовы к круглосуточной доставке. Позвоните нам или свяжитесь с нами сегодня, чтобы узнать больше.
Серводвигатели
– синхронные и асинхронные
Мы также предлагаем модульную концепцию двигателя для динамичных и точных сервоприводов. Выберите лучший серводвигатель для вашего приложения из трех серий синхронных и одной асинхронной: компактный, малоинерционный и мощный. Различные размеры и длина двигателей гарантируют широкий спектр применений и обеспечивают надежный крутящий момент в состоянии покоя.
Что такое серводвигатели?
Серводвигатель — это двигатель, который позволяет вам контролировать точное положение вала двигателя, а также скорость и/или ускорение. Для этой цели также используются соответствующие датчики и технология регулирования. Ранее серводвигатели представляли собой вспомогательные приводы, предназначенные для использования в станках. Между прочим, серводвигатель получил свое название от латинского слова «servus», что в переводе с английского означает «сервер».Серводвигатели состоят из асинхронного двигателя , синхронного двигателя или двигателя постоянного тока . Таким образом, разница между двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие типы серводвигателей доступны?
Серводвигатели
можно разделить на синхронные и асинхронные серводвигатели . Однако двигатель всегда представляет собой привод, который управляется электронным управлением позиционированием, скоростью или крутящим моментом или их комбинацией.К ним предъявляются очень высокие требования с точки зрения динамики, диапазонов настройки и/или точности перемещения. Серводвигатели в основном используются в сочетании с решениями по автоматизации и управлению , например, в упаковочных машинах.
Что мы предлагаем: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели
подходят для использования в приложениях, в которых высокая внешняя инерция должна перемещать установки и машины и управлять ими безопасно.Учитывая это, SEW‑EURODRIVE DRL. Серия двигателей предлагает подходящие приводные решения.
Синхронные серводвигатели
Синхронные серводвигатели представляют собой приводы, в которых ротор приводится в движение синхронно вращающимся полем в статоре с использованием постоянных магнитов. Синхронный двигатель имеет движение, синхронное с приложенной частотой вращающегося поля.
Эта конструкция привода работает от преобразователя частоты, который обеспечивает соответствующий регулируемый трехфазный ток .В портфолио SEW-EURODRIVE имеется ряд различных конструкций для этой цели. Оптимизированные серводвигатели серии CMP.. могут быть адаптированы к высокой динамике или высоким нагрузкам в зависимости от области применения . Классические области применения включают пищевую промышленность и производство предметов роскоши, а также строительство, автомобильную, упаковочную и деревообрабатывающую промышленность.
Для синхронных серводвигателей серии CM.. особое внимание уделяется оптимальным характеристикам управления, крутящему моменту и динамике. Идеальные области применения для этих двигателей можно найти в логистике, например, в качестве приводов для порталов X-Y-Z или систем хранения/поиска.
Обзор двигателя переменного тока
и технические характеристики двигателя переменного тока
Обзор двигателя переменного тока
Если вы ищете исчерпывающую информацию о двигателях переменного тока, вы попали в нужное место. Заказные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой. В этом типе двигателя первичная обмотка, или статор, подключается к источнику питания, в то время как короткозамкнутый вторичный элемент, или ротор, несет индуцированный вторичный ток.Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель относится к отдельному классу двигателей переменного тока из-за различий в конструкции и рабочих характеристиках. Sinotech предлагает надежный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, которые могут быть адаптированы к вашим точным спецификациям.
Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронные и синхронные двигатели переменного тока
Обзор асинхронных асинхронных двигателей переменного тока
Асинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными.Как одни из самых простых и надежных электродвигателей, асинхронные двигатели переменного тока имеют две основные электрические сборки: статор с обмоткой и узел ротора. Двигатель получил свое название от токов, втекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для создания вращения.
Электродвигатели переменного тока
, в том числе асинхронные, имеют роторы с пластинчатыми, цилиндрическими железными сердечниками с прорезями для приема проводников.Наиболее распространенный тип ротора, производимого производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и короткозамыкающие торцевые кольца. Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость, с которой вращается магнитное поле, называется синхронной скоростью (n s ). Эта скорость определяется количеством полюсов статора и частотой источника питания.Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f/p.
- n с: синхронная скорость в об/мин
- f: частота сетевого напряжения в Гц
- p: количество полюсов
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока. Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не пересекают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле.Скорость ротора достаточно мала, чтобы вызвать надлежащую величину тока ротора, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на аэродинамическое сопротивление и трение.
Разница скоростей между ротором двигателя переменного тока и магнитным полем называется «скольжением». Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s – n a )/n s .
- с = скольжение
- n с = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигатели имеют специальную конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора.Другими словами, они работают в абсолютной синхронизации с частотой сети. К основным типам синхронных двигателей относятся двигатели без возбуждения и двигатели с возбуждением от постоянного тока. Подобно асинхронным двигателям переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частоты линии.
Производители электродвигателей на заказ проектируют синхронные электродвигатели различных типоразмеров, от субдробных двигателей с автовозбуждением до двигателей переменного тока с возбуждением постоянного тока большой мощности для промышленных приводов.В диапазоне долей мощности синхронные двигатели обеспечивают точную постоянную скорость.
Применительно к промышленным нагрузкам синхронные двигатели с большой мощностью выполняют две важные функции:
- Обеспечение высокоэффективных средств преобразования энергии переменного тока в механическую энергию
- Работа с опережающим или единичным коэффициентом мощности, что обеспечивает коррекцию коэффициента мощности
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают электродвигатели без возбуждения, используя конструкции с магнитным сопротивлением и гистерезисом.Они используют схему самозапуска и не требуют внешнего источника возбуждения.
Синхронные электродвигатели с возбуждением от постоянного тока
Электродвигатели с возбуждением от постоянного тока
доступны в размерах более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в движение или их ротор должен быть подключен в виде цепи самозапуска для запуска.Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет войти в синхронизм. Разгон с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, важно использовать отдельные средства для начала.
В самозапускающихся электрических двигателях переменного тока, изготовленных по индивидуальному заказу, типоразмера fhp используются методы пуска, общие для асинхронных электродвигателей, такие как расщепленная фаза, пуск с конденсатором, пуск с отталкиванием и пуск с экранированными полюсами. Двигатели автоматически переключаются в синхронный режим из-за электрических характеристик.
В двигателях с возбуждением постоянным током
для запуска используется короткозамкнутая обмотка, называемая амортизирующей или демпферной обмоткой. Между прочим, низкий пусковой момент двигателя и потребность в источнике питания постоянного тока требуют пусковой системы, которая:
- Обеспечивает полную защиту электродвигателя при запуске
- Применяет возбуждение постоянного поля в нужное время
- Удаляет возбуждение поля при вытягивании ротора (максимальный крутящий момент)
- Защищает короткозамкнутую обмотку электродвигателя от теплового повреждения при асинхронном режиме
Взгляд на крутящий момент в электродвигателях с возбуждением постоянным током
Крутящий момент
Подтягивающий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки втягивания.Этот крутящий момент должен превышать крутящий момент нагрузки настолько, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Крутящий момент сопротивления
Момент реактивного сопротивления двигателя является результатом заметности полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронных.
Момент реактивного сопротивления влияет на моменты втягивания и вытягивания двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем электродвигателя статора для поддержания минимального магнитного сопротивления.Сопротивления электродвигателя может быть достаточно, чтобы привести малонагруженную малоинерционную систему в синхронизм и развить тяговый момент примерно в 30 процентов.
Синхронный крутящий момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения. Он представляет собой общий стационарный крутящий момент, доступный для управления нагрузкой. Крутящий момент достигает максимума при отставании ротора примерно на 70° от вращающегося магнитного поля статора. Однако максимальным значением является момент отрыва.
Момент затяжки
Момент отрыва — это максимальный устойчивый крутящий момент, развиваемый электродвигателем на синхронной скорости в течение одной минуты при номинальной частоте и нормальном возбуждении. Нормальный момент отрыва обычно составляет 150 процентов от момента полной нагрузки для электродвигателей с единичным коэффициентом мощности. Это от 175 до 200 процентов для электродвигателей с ведущим коэффициентом мощности 0,8.
Втягивающий момент
Втягивающий момент синхронного двигателя — это крутящий момент, развиваемый при втягивании подключенной инерционной нагрузки в синхронизм при приложении возбуждения.Он развивается при переходе от скорости проскальзывания к синхронной скорости, когда электродвигатели переходят с асинхронного режима работы на синхронный. Это, как правило, самый критический период при запуске синхронного двигателя. При синхронной скорости момент, развиваемый амортизирующей и обмотками возбуждения, становится равным нулю. В результате в точке втягивания действуют только сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмотки возбуждения.
Дополнительные типы нестандартных конструкций двигателей переменного тока
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью.Они имеют некоторую степень гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости полной нагрузки. Стандартизация и инновации позволили создать четыре основных типа двигателей переменного тока:
.
Исполнения A и B Характеристики
- Двигатель переменного тока общего назначения с нормальными пусковыми моментами и токами, а также малым скольжением
- Дробные многофазные двигатели переменного тока, как правило, конструкции B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же аварийным или максимальным крутящим моментом, как у однофазного двигателя переменного тока, не может достичь той же точки скорости-момента для скорости с полной нагрузкой, что и однофазный пользовательский двигатель переменного тока. конструкции двигателя
- Опрокидывающий крутящий момент должен быть выше для сопоставимых скоростей при полной нагрузке (минимум 140 % опрокидывающего крутящего момента однофазных двигателей переменного тока общего назначения)
Исполнение C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где пусковые нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке
- Не требует высоких перегрузок после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снижать скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая скорость при полной нагрузке
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются по проскальзыванию или форме кривой скорость-момент
Исполнение F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Производители двигателей на заказ изготавливают двигатели переменного тока для получения низкого тока при заторможенном роторе
- Заблокированный ротор и низкий крутящий момент
- Двигатели обычно используются, когда пусковой момент низкий и после достижения рабочей скорости не возникают высокие перегрузки
Двигатели переменного тока с фазным ротором
Электродвигатели переменного тока с короткозамкнутым ротором
относительно негибкие в отношении характеристик скорости и крутящего момента.Однако специальный двигатель переменного тока с фазным ротором имеет регулируемую скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Получение рабочих характеристик двигателя переменного тока заключается в введении различных значений сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно уменьшается, чтобы позволить двигателю набрать скорость.В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут проектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, которая приводит к большим падениям скорости вращения при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50 процентов от номинальной скорости, но эффективность остается низкой.
Многоскоростные двигатели переменного тока
Изготовители двигателей по индивидуальному заказу проектируют двигатели переменного тока с последовательной последовательностью полюсов для работы на одной скорости. Физически переподключив провода, можно добиться соотношения скоростей 2:1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об/мин (2/4 полюса)
- 1800/900 об/мин (4/8 полюсов)
- 1200/600 об/мин (6/12 полюсов)
Двигатели переменного тока с двумя обмотками имеют две отдельные обмотки, которые производители могут наматывать для любого числа полюсов, чтобы облегчить получение других соотношений скоростей.Однако соотношение больше 1:4 нецелесообразно из-за размера и веса двигателя переменного тока. Однофазные двигатели переменного тока обычно имеют конструкцию с переменным крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью в лошадиных силах.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции двигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих характеристик нагрузки:
- Переменная крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-момент, которые зависят от квадрата скорости.Например, электродвигатель с частотой вращения 1800/900 об/мин, развивающий мощность 10 л.с. при 1800 об/мин, производит 2,5 л.с. при 900 об/мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требуемый крутящий момент зависит от квадрата или куба скорости. Эта характеристика двигателя в целом достаточна.
- Постоянный крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об/мин производит 5 л.с. при 900 об/мин.Вы найдете эти двигатели в приложениях с требованиями постоянного крутящего момента, таких как смесители, конвейеры и компрессоры.
- Константа лошадиных сил : Эти двигатели переменного тока развивают одинаковую мощность в лошадиных силах на каждой скорости. Крутящий момент обратно пропорционален скорости. Применение таких двигателей переменного тока включает станки, в том числе дрели, фрезерные станки и токарные станки.
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность.Однако однофазная интегральная мощность доступна в более низком диапазоне мощности. Наиболее распространенные однофазные двигатели переменного тока с дробной мощностью:
.
- Двухфазный
- Интеллектуальный конденсатор
- Постоянный разъемный конденсатор
- Заштрихованная стойка
Этот нестандартный двигатель переменного тока доступен в многоскоростном исполнении, но существуют практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Методы последовательного полюса или двухобмоточные методы могут сопровождать выбор скорости.
Универсальные двигатели
Универсальные двигатели
Двигатели
Universal работают практически с одинаковыми характеристиками при постоянном или переменном токе частотой до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими металлическими пластинами. Двигатели постоянного тока могут работать от переменного тока, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателей переменного тока. Однако у них хуже коммутация и срок службы щеток по сравнению с эквивалентным двигателем постоянного тока.Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое отношение мощности к фунту среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
При работе без нагрузки универсальные двигатели склонны к разгону. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На переносных инструментах, таких как электрические пилы, нагрузка, создаваемая шестернями, подшипниками и охлаждающим вентилятором, достаточна для удержания скорости холостого хода на безопасном уровне.
С универсальным двигателем управление скоростью осуществляется просто, поскольку скорость электродвигателя чувствительна к изменениям напряжения и потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной скорости до нуля.
Электродвигатели синхронизации
Электродвигатели синхронизаторов мощностью менее 1/10 л.с. используются в качестве первичных двигателей для устройств синхронизации. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигатели переменного и постоянного тока
могут использоваться в качестве синхронизирующих двигателей.Электрические синхронизирующие двигатели постоянного тока используются в портативных устройствах или когда требуется высокое ускорение и низкие изменения скорости. Хотя требуется какая-либо форма механического или электрического регулятора скорости, такие электродвигатели обладают рядом преимуществ, в том числе:
- Эффективность от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простое регулирование скорости
Серводвигатели переменного тока
Серводвигатели
используются в сервомеханизмах переменного тока и компьютерах, требующих быстрого и точного отклика.Для получения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрых пусков, остановок и реверсов. Высокое сопротивление обеспечивает почти линейное соотношение скорости и крутящего момента для точного управления.
Серводвигатели ветра, изготовленные по индивидуальному заказу, с двумя фазами, физически расположенными под прямым углом или квадратурой в пространстве. Двигатели имеют фиксированную или эталонную обмотку, которая возбуждается от источника постоянного напряжения. Обмотка управления возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя.Инженеры проектируют обмотки серводвигателей с одинаковым отношением напряжения к витку, чтобы входная мощность при максимальном возбуждении с фиксированной фазой и максимальном сигнале фазы управления были сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению на управляющей обмотке двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях легкой нагрузки.
Свойственное серводвигателям демпфирование уменьшается по мере увеличения номинальных характеристик, и двигатели имеют разумную эффективность в ущерб линейности скорости-крутящего момента.Многие более крупные серводвигатели имеют встроенные вспомогательные вентиляторы для поддержания температуры в безопасных рабочих диапазонах. Доступны серводвигатели переменного тока мощностью от менее 1 до 750 Вт и размером от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает двигатели переменного тока на заказ в США и производит их в нескольких местах по всему Азиатско-Тихоокеанскому региону, чтобы снизить ваши расходы и риски.Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению двигателей переменного тока на заказ могут помочь вам запустить и запустить ваше приложение уже сегодня.
электродвигатель | Британика
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности.В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла.Для простоты показана только центральная петля проводника для каждой фазной обмотки. В момент t 1 на рисунке ток в фазе a максимально положителен, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.т. е., на одну шестую цикла позже), ток в фазе c максимально отрицателен, а в фазах b и фазе a половина положительного значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников.Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. На этом рисунке показана картина токов ротора для момента t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т.е., крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и создаваемые им токи в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке.Таким образом, общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или на 90 °, для обеспечения требуемой электрической мощности. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне 0.4 на 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для мощных двигателей мощностью примерно до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число).Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ p )°. Крутящий момент, доступный от корпуса машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Могу ли я контролировать точность асинхронного двигателя как сервопривод
Я много работал над проектированием синхронных серводвигателей с постоянными магнитами и их систем. Обычно я работаю с точностью до 20 микрон или меньше, это приложение обеспечивает точность позиционирования всего около 800 микрон. Ниже приведены некоторые принципы, которые я использую, чтобы ориентироваться в приложениях, которые могут вам помочь.
Во-первых, точность зависит от системы, а не только от двигателя. Двигатель — это просто устройство для преобразования тока в крутящий момент или силу.Ваша система состоит из следующих частей: Загрузка, это механическая часть системы, включая работу и фрезы; жестче всегда лучше, когда речь идет о точности, и если ваш груз слишком гибкий, требуемая точность может быть невозможной. Контроллер/усилитель — это место, где контур сервопривода замыкается, задаются параметры настройки системы и регулируется ток в обмотках двигателя. может быть сложной темой.Кодер или устройство обратной связи, более высокое разрешение всегда лучше; Я обнаружил, что мне нужно как минимум 10-кратное разрешение для желаемой точности системы. Наконец, двигатель. В приложении позиционирования я обычно считаю, что более низкая инерция лучше для точности, но в управлении скоростью (что больше похоже на то, что вам нужно) я считаю, что более высокая инерция лучше для точности; это связано с тем, что приложения управления скоростью, как правило, не нуждаются в высоких ускорениях или быстрых изменениях скорости, это означает, что высокая инерция — ваш друг, она имеет тенденцию сглаживать вещи и поддерживать постоянную скорость.
Технология Синхронная и Асинхронная: Синхронные, как правило, дешевле до 1,5 кВт, имеют меньшую инерцию и более высокие коэффициенты ускорения для лучшего контроля позиционирования. Асинхронный имеет тенденцию быть более рентабельным при мощности выше 2,0 кВт, имеет более высокую инерцию и меньшую способность быстро изменять скорость.