
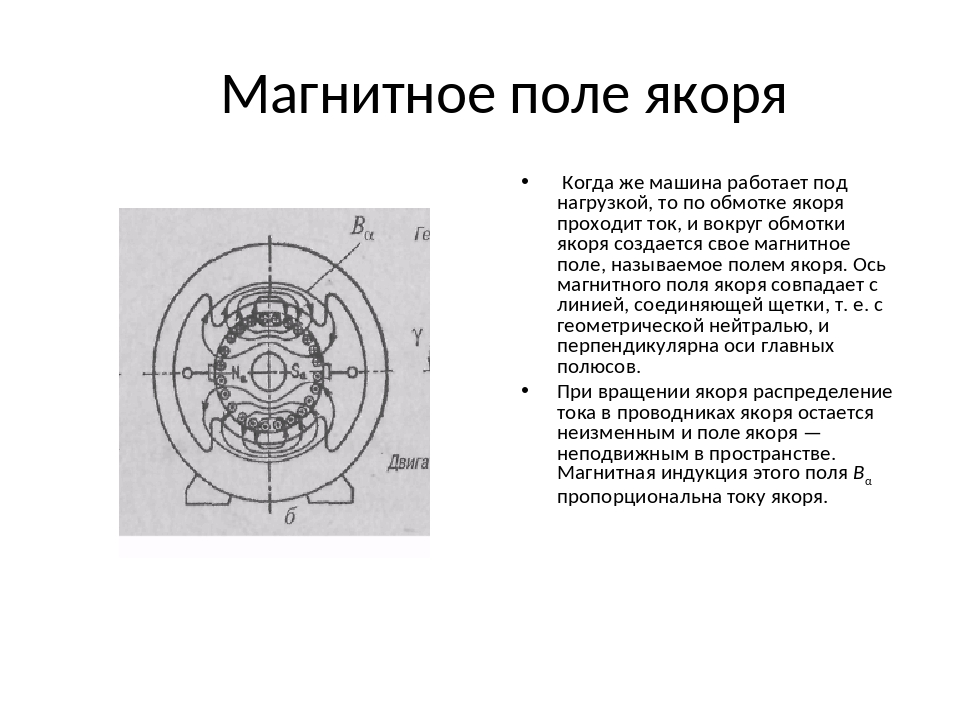
Задачник по физике — Белолипецкий С.Н. — DJVU, страница 41
Рассеяние магнитного потока в ярме трансформатора и потери энергии в его первичной обмотке пренебрежимо малы. 4.1808. Сила тока холостого хода в первичной обмотке понижающего трансформатора, питаемой от сети переменного тока частоты и = 50 Гц и напряжения 111 = 220 В, равна 11 = =- 0,20 А. Активное сопротивление первичной обмотки Лл = 100 Ом. Определите индуктивность Е первичной обмотки и напряжение Гг на зажимах вторичной обмотки, если коэффициент трансформации 1- = 10. 4.181 .
На железный сердечник намотаны две катушки (см. рисунок). Магнллтный поток, создаваемый каждой катушкой, не вьлходит из сердечника и делится поровну в разветвлениях. Прлл включенилл катушки 1 в цепь переменного тока напряжения Г11 = 40 В напряжение на катушке 3 равно Г12 = 10 В. Какое напряжение Ул возникнет на разомкнутых зажимах катуплки 1, если на катушку 2 подать переменный ток с напряжением с12 —— = 10 В? Потери энергии пренебрежимо малы. К задача 4.181 К задача 4.182 4.1828. Первичная обмотка трансформатора содержит Х витков, вторичная один виток.
К задача 4.181 К задача 4.182 4.1828. Первичная обмотка трансформатора содержит Х витков, вторичная один виток.
Трансформатор подключен к источнику переменного тока с ЭДС Е. К замкнутому витку вторичной обмотки подкллкплен гальванометр с внутренним сопротивлением т так, что точки подключения гальванометра делят виток на у ластки с сопротивлениями Лл и Л2 (см, рисунок). Определите силу тока 1 через гальваноълетр. Потери энергии в 202 коливлния и волны ГЛ. 4 первичной обмотке и рассеяние магнитного потока в серде пшке пренебрежимо малы. 4.1834. Два одинаковых идеальных трансформатора с коэффициентами трансформации к = 1/3 соединены последовательно разными обмотками (см. рисунок) и подклю юны к источнику переменного тока напряжения У = 100 В.
Определите напряжение Г4ап возникающее тлежду клеммами А и В. Длины и сечения катушек одинаковы. К задаче 4483 4.1844. На тороидальньш сердечник из феррита с магнитной проницаемостыо р, = 2000 намотаны две катушки: первичная и вторичная, содержащие соответственно Х1 = 2000 и № = = 4000 витков.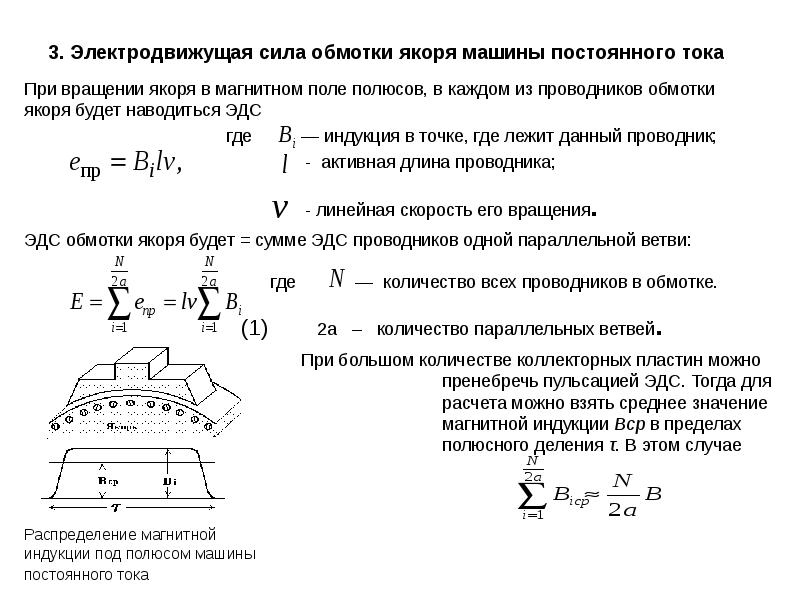 Когда на первичнук> катушку подается напряжение бе1 =- 100 В, напряжение па разомкнутой втори шой обмотке составляет Г~ = 199 В. Какое напряжение Г~ возникает на разомкнутой вторичной катушке, если воспользоватьсж серде еником таких же размеров, но изготовленным из феррита с р’ = 20? Рассеяние магнитного потока и потери энергии в сердечнике пренебрежимо малы.
Когда на первичнук> катушку подается напряжение бе1 =- 100 В, напряжение па разомкнутой втори шой обмотке составляет Г~ = 199 В. Какое напряжение Г~ возникает на разомкнутой вторичной катушке, если воспользоватьсж серде еником таких же размеров, но изготовленным из феррита с р’ = 20? Рассеяние магнитного потока и потери энергии в сердечнике пренебрежимо малы.
4.9. Электрические машины постоянного тока Электрическими машинами постоянного тока называют электродвигатели (электромоторы) и электрогенераторы (динамо-машины) постоянного тока. Элекшродвигатель преобразует энергию электромагнитного поля в механическую. Основными элементами электродвигателя являк>тся индуктор — источник электромагнитного поля и якорь (рогаор) враща|ощаяся тасть электродвигателя, представляюпия собой совокупность рамок с током, которые называют обмотка ии. Вели индуктор представляет собои постоянный 4.9 ЭЛНКТРИЧКСКИК МЛП!ИНЫ ПОСТОЯННОГО ‘!’ОКЛ 203 ътаГнит или элттктрохтагттттт, обмотка которого питается не:зависимо от обмотки якоря„то такой электродвигатель называют элекптродвигателем постоянного тока с независимым воэбуэтс- дениелв Закон Ома для цепи якоря электродвигателя с независимым возбуждением имеет вид ?? — б! = 1Л, где ?? напряжение источника тока.
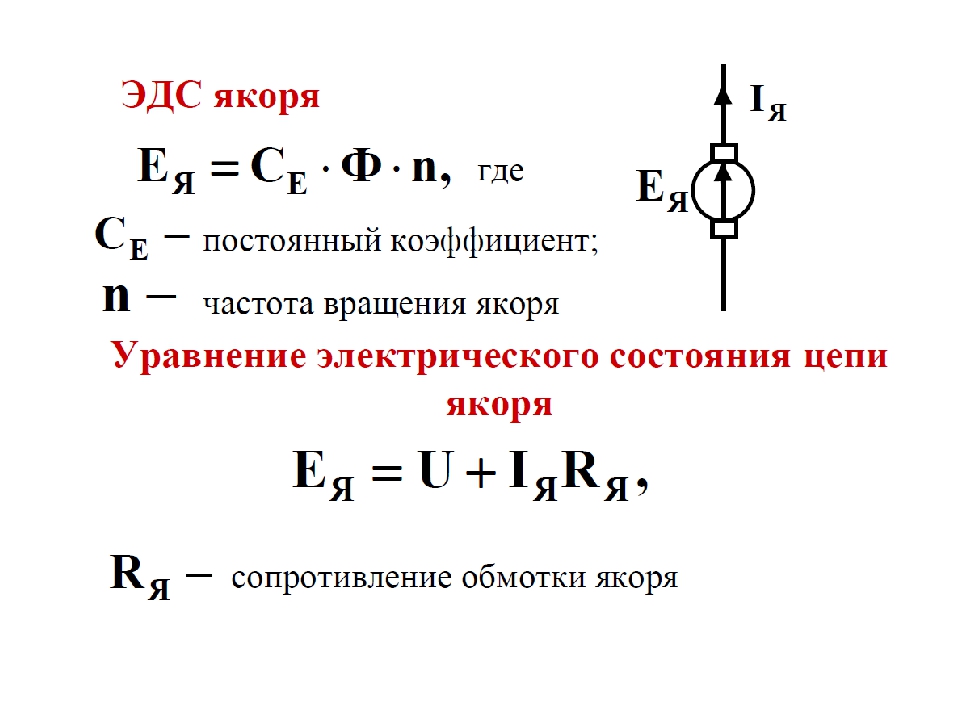
ст — ЭДС индукции, воз- ннкактп!ая в обмотке якоря при его вращении в магнитном поле, индуктора, 1 сила тока в цепи, Л обп!ее сопротивление об- мотки якоря и подводятпих проводов. Закон схт еранения энергии для цепи якоря электродвигателя ??1 = 1~Л+ Р, где Р = ст? полезная мощность. Электрогене?!автор преобразует механическую энергикт в электромагнитнуто. Его устройство аналогично устройству элек- тродвигателя.
Закон Ома дгтя генератора Е! = 1Л., где ст —.- ЭДС инлукции, возникающая в обмотке якоря! 1 . — ток в обмотке якоря; Л сопротивление цепи якоря. Закон сохранения энергии для идеального электродвигателя (потерт! энергии на трение пренебрежимо э!альт) имеет вид Рв=б,1, где Р,„механическая мощность, расходуемая на вратцение яко- !тя. Закон обраптимости элекгпри ссскигс ма!итти. Если одна и та же электрическая машина работает в первом случае как элек- трогенератор, во втором как электродвигатель. то бт! т’11 ст2 вт2 угловая скорость вращения якоря электрической мапти- где ы ны.
4.185 . Электродвигатель с независимым возбуждением 2 подключен к источнику постоянного тока напряжения ??. Сопротивление обмотки якоря и подводящих проводов равно Л. Изобразите графики зависимостей ЭДС индукции б, возникающей в обмотке якоря, силы тока 1 в т!спи и полезной мощности Р от угловой скорости ы враптенвя якоря. Определите максимальную полезную мощность Р„„„,. Какому зна»тению силы тока 19 в цепи соответствует эта мощность? 204 КОлевания и ВОлны ГН. 4 4.186Я. Электродвигатель питается от батареи с ЭДС Е = = 12 В.
Какую мощность Р развивает двигатель при протекании по его обмотке тока 1 = 2, 0 А, если при полной остановке якоря по цепи течет ток 1в = 3, 0 А? 4.187 . Электродвигатель присоединили к источнику тока г напряжения 5| = 500 В. При силе тока в цепи 1| = 10 А он развивает мощность Р| = 4,0 кВт. Определите мо|цность Рж развиваемую двигателем, если вследствие изменения нагрузки сила тока в цепи стала равной ?з = 20 А. 4.188 . В момент включения эл|ктродвигателя в сеть по- 2 стоянного тока сила тока в цепи составляет 1в = 15 А, а в процессе работы электродвигателя в установившемся режиме она снижается до значения 1 = 9, 0 А.
Определите КПД и электродвигателя. 4.189 . Электродвигатель вклю |ен в сеть постоянного тока. 3 Прп частоте арап|ения якоря |’| = 1000 об?мин ток в цепи якоря равен 1| = 10 А, а при |астоте |’з = 900 об,’мин он равен ?э = = 15 А. Определите частоту вра|пения 1з двигателя на холостом ходу (без нагрузки). 4.190~. Вал электродвигателя постоянного тока, включенного вхолостую в сеть с напряжением Г = 24 В, вращается с частотой (| = 10 об,’с при полном сопротивлении цепи Л = 20 Ом и силе тока в цепи?| — — О, 20 А. Какой ток Р> течет через обмотку якоря электродвигателя, когда с его помощью подниълают груз массы т, = 1, 0 кг на легком тросике, который наматывается на шкив диаметра В = 20 мм? С какой частотой ~з вращается при этом вал электродвигателя? Момент гил трения в оси не зависит от скорости вращения вала.
4.191~. Вал электродвигателя постоянного тока, включенного без нагрузки в сеть постоянного тока. вращается с частотой ~| = 1000 об/мин, с нагрузкой . с частотой ~з = 700 об,’мин.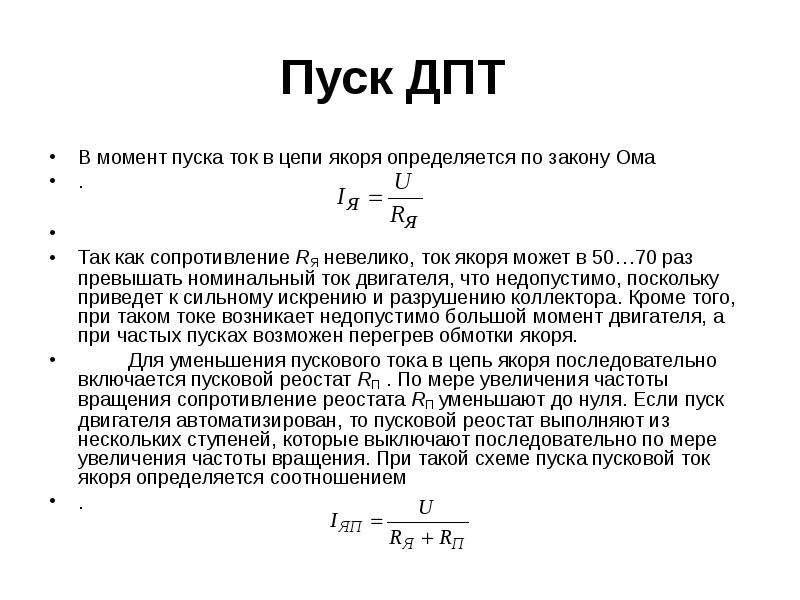 С какой частотой| (‘з будет врагцаться вал двигателя, если момент си.л, создаваемьш нагрузкой, увеличить на 9 = 20 % ? Трение в оси двигателя пренебрежимо мало. 4.192~. Лебедка приводится в движение электродвигателем с независимым возбуждением. Электродвигатель питается от батареи с ЭДС Е = 300 В. Без груза конец троса .|ебедкп поднимается со скоростью и| = 4, 0 м,’с, с грузом массы т = 10 кг со скоРостью пз = 1, 0 и,,’с. Опйеделите, с ~ак~й ско1|остыо па должен двигаться груз и какова должна быть его масса гпш чтобы лебедка развивала максимальную мощность. Массой троса и трением в оси двигателя пренебречь.
С какой частотой| (‘з будет врагцаться вал двигателя, если момент си.л, создаваемьш нагрузкой, увеличить на 9 = 20 % ? Трение в оси двигателя пренебрежимо мало. 4.192~. Лебедка приводится в движение электродвигателем с независимым возбуждением. Электродвигатель питается от батареи с ЭДС Е = 300 В. Без груза конец троса .|ебедкп поднимается со скоростью и| = 4, 0 м,’с, с грузом массы т = 10 кг со скоРостью пз = 1, 0 и,,’с. Опйеделите, с ~ак~й ско1|остыо па должен двигаться груз и какова должна быть его масса гпш чтобы лебедка развивала максимальную мощность. Массой троса и трением в оси двигателя пренебречь.
4.1934. Сопротивление обмотки якоря электродвигателя равно йц а обмотки индуктора йв. Вели обмотки якоря и индуктора соединены последовательно и подклк|чены к одному иг- 4.9 элнктгичнскик мл!пинь1 ИОстОЯннОГО ‘!’Окл 205 точнику тока, то такой электродвигатель называк>т двигателем с последовательным возбуждением (серигсным двигателем). Гели же обмотки соединены параллельно, то электродвигатель называют двигателем с параллельным возбуждением (шунтовым двшителем). В каком случае максимальная полезная мощность Р болыпе? Каковы коэффициенты полезного действия 0, соответствукицие максимальным значениям мощности в обоих случаях’? Напряжение питания двигателя равно 1Е. 4.194 .
В каком случае максимальная полезная мощность Р болыпе? Каковы коэффициенты полезного действия 0, соответствукицие максимальным значениям мощности в обоих случаях’? Напряжение питания двигателя равно 1Е. 4.194 .
Вал электродвигателя постоянного тока, на клеммы которого подано напряжение 1Е! = 120 В, вращается с частотой Е! = 15 об,’с при силе тока в цепи якоря Е> =- 1,0 А. Какую ЭДС б, разовьет та же электрическая мшпина, работая в качестве генератора при частоте вра>цения вала ~з = 30 !>б,’с? Каким будет напряжение Гз на сопротивлении нагрузки Л = 65 Ом, подключенном к клеммам этого генератора’? Какук> мощность Р развивает при этом генератор? Сопротивление обмотки якоря г =- 5,0 Ом. 4.1 95а.
Угловая скорость вращения якоря генератора с постоянным магнитом увеличилась на Ч„ = 10 А>. На сколько >! процентов увеличится при этом полезная мощность генератора? 4.196а. Какую ЭДС 5 развивает генератор постоянного тока, если при сопротивлении цепи Л! = 300 Ом на вращение ротора затра >ивастся мощность Р> = 50 Вт, а потери на трение составляют о = 4% от затраченной мо>цности? Какую мощность Рз для поддержания той же частоты вращения якоря необходимо затра !ивать при сопротивлении цепи Лз = 60 Ом? 4. 1974. Груз массы т подвешен на невесомой нити, намотанной на ось якоря генератора с независимым возбуждением, замкнутои на резистор сопротивления Л.
1974. Груз массы т подвешен на невесомой нити, намотанной на ось якоря генератора с независимым возбуждением, замкнутои на резистор сопротивления Л.
Нить смать>вается с оси так, что груз опускается с постоянной скоростью в>. С какой скоростью вз будет подниматься вверх тот же груз, если генератор включить как электродвигатель в цепь постоянного тока с напряжением 1Е и тем же сопротивлением цепи Л? Сопротивлением обмотки якоря генератора пренебречь. 4.1984. Электродвигатель постоянного тока с независимь!м возбуждением (с постоянным магнитом) поднимает груз со скоростью в> при помощи невесомой нити, наматывающейся на ось двигателя. В отсутствие груза невесомая нить поднимается со скоростью го.
С какой скоростью оз будет опускаться тот же груз, если обмотка якоря будет замкнута накоротко? Трением в подшипниках пренебречь. 4.1994. Имеется генератор с независиъ>ым возбуждением, на якоре которого име>отея две одинаковые обмотки с сопротивлением > каждая; каждая из обмоток соединена с одним из двух одинаковых коллекторов, Одну из обмоток подключили к 206 кОленания и ВОлны ГЛ.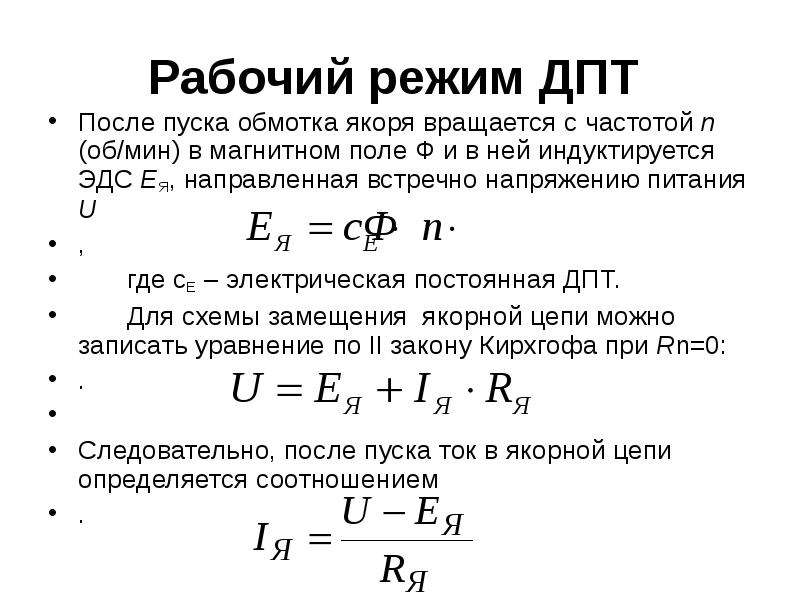 4 исто >нику с напряжением 11; другу>о замкнули на резистор сопротивления Л, Как зависят ЭДС индукции в обмотках и сила тока в каждой из обмоток от сопротивления Л? 4.10. Колебательиь>й контур Частным случаем электрической цепи, в которой могут происходить свободные электрические колебания, является колебагаальный коня>ур (см.
4 исто >нику с напряжением 11; другу>о замкнули на резистор сопротивления Л, Как зависят ЭДС индукции в обмотках и сила тока в каждой из обмоток от сопротивления Л? 4.10. Колебательиь>й контур Частным случаем электрической цепи, в которой могут происходить свободные электрические колебания, является колебагаальный коня>ур (см.
Электродвигатели Обмотка якоря — Энциклопедия по машиностроению XXL
Во многих машинах и механизмах немеханическим способом приводятся в движение только некоторые звенья цепи, чаще всего — входные, а передача движения остальным звеньям осуществляется механическим способом. Наибольшее распространение получили механизмы с электроприводом — электромеханическим устройством, в котором источником механического движения служит электродвигатель. В самом электродвигателе выходное звено — ротор — приводится в движение в результате взаимодействия с движущимся электромагнитным полем. Взаимодействием с электромагнитным полем обмотки / якоря 2, совмещенного со штоком 3 клапана (рис.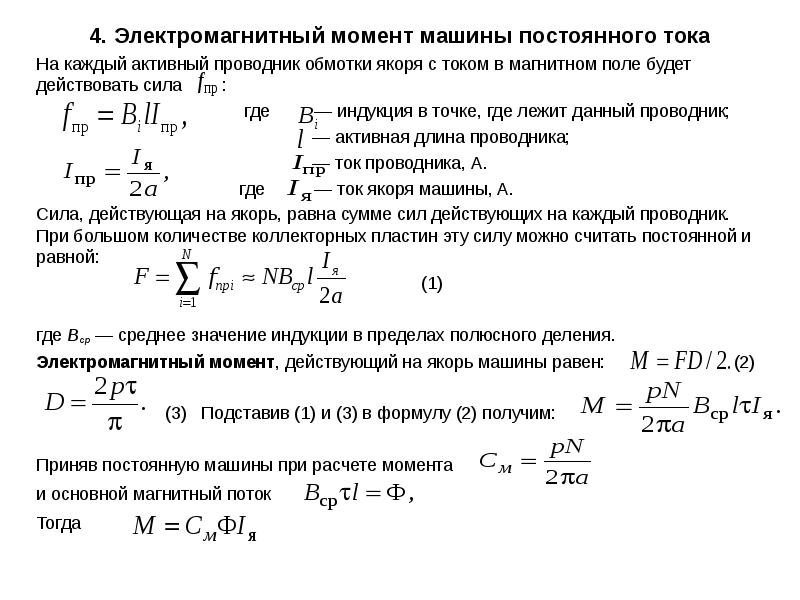 2.25), осуществляется управление механизмом клапана.
[c.23]
2.25), осуществляется управление механизмом клапана.
[c.23]
Обычно для изменения скорости растяжения образца применяются схемы регулирования числа оборотов электродвигателя постоянного тока с помощью включения в обмотку якоря или обмотку возбуждения управляющего реостата. Включение реостата требует значительного дополнительного расхода электроэнергии в цепи управления. Кроме того, сопротивление реостата ограничивает пределы изменения частоты вращения электродвигателя в области низких значений скорости растяжения, поэтому при такой схеме регулирования приходится использовать электродвигатель с заведомо увеличенной в несколько раз мощностью с тем, чтобы при минимальной частоте вращения получить требуемое значение крутящего момента на валу двигателя и, таким образом, усилие растяжения образца.
[c.84]
Шунтовой электродвигатель. Обмотка возбуждения шунтового двигателя приключается параллельно якорю (фиг. 41, я). При
[c.531]
41, я). При
[c.531]
Сериесный электродвигатель. Обмотка возбуждения сериесного двигателя включается последовательно в цепь якоря. Магнитный поток здесь является функцией тока якоря. При увеличении нагрузки сериесный двигатель резко снижает скорость вращения, при разгрузке— повышает. При холостом ходе двигатель идёт. в разнос . Применение сериесного двигателя недопустимо, где возможен его холостой ход. По этой причине недопустима работа его с ремённой передачей. Так как магнитный [c.531]
Сериесный электродвигатель. Обмотка возбуждения и якоря включается последовательно. При одновременном изменении тока в них знак момента будет оставаться тем же. Величина момента, создаваемого двигателем, не будет оставаться постоянной, а будет меняться во времени. Благодаря инерции якоря, несмотря на пульсирующий характер момента, двигатель вращается с равномерной скоростью. Вращающий момент двигателя примерно пропорционален квадрату силы тока.
[c. 540]
540]
Погрешность скорости вращения якоря электродвигателя зависит от погрешностей сопротивления Rя обмотки якоря, переходного падения напряжения на щетках, числа проводников со обмотки якоря, магнитного потока Ф в зазоре. Эти погрешности рассматриваются как случайные. Число оборотов якоря электродвигате,ля определяется по формуле [c.375]
Внутренний цилиндр вращается от электродвигателя постоянного тока, возбуждаемого постоянным магнитом. Наружный цилиндр — неподвижен. Обмотка якоря электродвигателя включена в мост постоянного тока. В основу измерения вязкости шлаков положен принцип регистрации изменения силы тока в роторе электродвигателя при погружении внутреннего цилиндра в расплавленный шлак. Прибор предназначен для измерения вязкости от 0,04 до 20,0 н-сек-м- — Rn = 1,2 =
[c.161]
При динамическом торможении цепь якоря вращающегося двигателя отключается от сети и замыкается на реостат.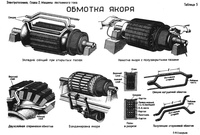 Обмотка возбуждения остается подключенной к сети. В обмотке якоря, вращающегося по инерции, индуцируется ЭДС, которая поддерживает ток в этой цепи. Ток в цепи якоря взаимодействует с магнитным полем и создает тормозной момент, а при остановке двигателя ЭДС якоря, его ток и тормозной момент падают до нуля. Для получения генераторного торможения необходимо, чтобы частота вращения ротора электродвигателя была больше частоты вращения магнитного поля статора. В этом случае двигатель является генератором и через обмотку статора будет отдавать электроэнергию в сеть.
[c.204]
Обмотка возбуждения остается подключенной к сети. В обмотке якоря, вращающегося по инерции, индуцируется ЭДС, которая поддерживает ток в этой цепи. Ток в цепи якоря взаимодействует с магнитным полем и создает тормозной момент, а при остановке двигателя ЭДС якоря, его ток и тормозной момент падают до нуля. Для получения генераторного торможения необходимо, чтобы частота вращения ротора электродвигателя была больше частоты вращения магнитного поля статора. В этом случае двигатель является генератором и через обмотку статора будет отдавать электроэнергию в сеть.
[c.204]
I — генератор импульсов СС 2 — обмотка возбуждения электродвигателя 3 — якорь электродвигателя 4 — потенциометр 5 — вспомогательный источник постоянного тока. [c.307]
Лаки. Изготовленная обмотка якорей и полюсных катушек электродвигателей подвергается пропитке изоляционными лаками. Для этих целей чаще всего применяют [c.6]
Назовите марку проводов, применяемых для обмотки якоря электродвигателя и полюсны. х катушек.
[c.12]
х катушек.
[c.12]
Обрыв в подводящих ток проводах Обрыв в обмотке якоря или обмотке полюсов электродвигателя Поврежден реостат и пуск производится сразу со второй скорости Слишком быстро осуществляется переход от первой к третьей скорости [c.76]
Включение и выключение движений станка осуществляется включением и выключением соответствующей электрической или кинематической сети. Включение или выключение электродвигателя производится с помощью контакторных устройств, дающих сигнал, и зависит от типа двигателя. В двигателях переменного тока сигнал направляется в обмотку управления, а в двигателях постоянного тока — в обмотку якоря или в обмотку возбуждения, в зависимости от того, какой тип управления двигателем принят. [c.552]
Для перемены направления вращения якоря электродвигателя необходимо изменить направление тока или в обмотке якоря, или в обмотке возбуждения. [c.50]
В сбс-рочных цехах имеют также распространение пневматические сверлильные машины. Их преимущество перед электрическими состоит в том, что они не боятся перегрузки, которая часто вызывает чрезмерное нагревание электродвигателей и перегорание обмотки якоря.
[c.99]
Их преимущество перед электрическими состоит в том, что они не боятся перегрузки, которая часто вызывает чрезмерное нагревание электродвигателей и перегорание обмотки якоря.
[c.99]
Электродвигатель стартера имеет последовательное возбуждение, т, е. его обмотка возбуждения соединена последовательно с обмоткой якоря, и [c.115]
Управление стартером в обеих схемах осуществляется следующим образом. При замыкании контактов выключателя зажигания по обмотке дополнительного реле пойдет ток и замкнутся его контакты. При замыкании контактов по цепи стартера пойдет ток по двум параллельным ветвям в одной включена удерживающая обмотка реле стартера в другой последовательно включены втягивающая обмотка, обмотка возбуждения и обмотка якоря. Проходящий по обмоткам реле стартера ток намагничивает сердечник, якорь реле стартера втягивается и перемещает контактный диск, который замыкает цепь электродвигателя стартера и шунтирует втягивающую обмотку.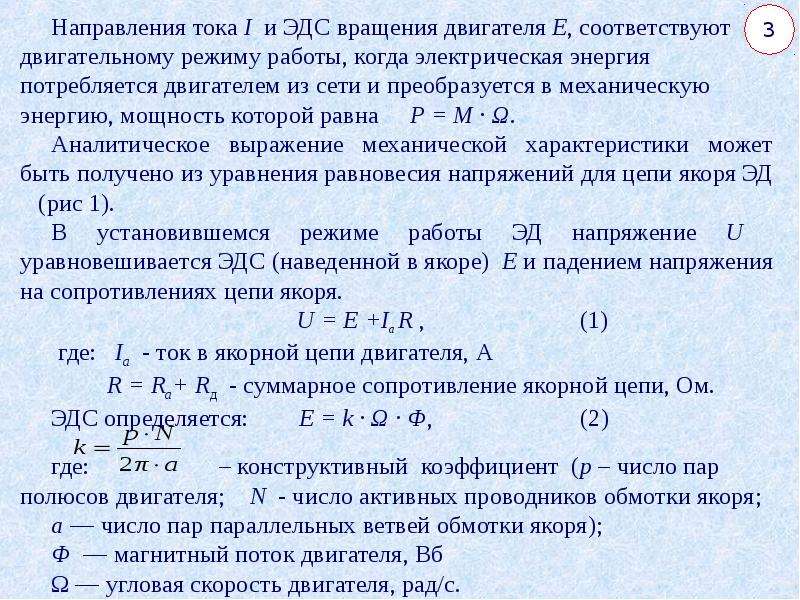 Реле стартера остается включенным только под действием удерживающей обмотки.
[c.153]
Реле стартера остается включенным только под действием удерживающей обмотки.
[c.153]
Это может привести к разносу обмотки и коллектора. Как будет показано ниже, высокая частота в режиме холостого хода способствует возникновению динамической пробуксовки привода. По этим причинам стремятся на сколько возможно уменьшить частоту вращения стартера при холостом ходе. Частота вращения вала электродвигателя постоянного тока обратно пропорциональна магнитному потоку возбуждения. При последовательном возбуждении с уменьшением нагрузки магнитный поток падает и частота вращения в режиме холостого хода достигает 6000—8000 об/мин. У малогабаритных (с наружным диаметром 100 м и меньше) стартеров магнитный поток очень мал, и частота вращения в режиме холостого хода при последовательном возбуждении превышала бы 10 000 об/мин. Для уменьшения частоты вращения в режиме холостого хода малогабаритные стартеры выполняются со смешанным возбуждением (рис. 21). При этом обмотка возбуждения состоит из трех или двух катушек толстого медного провода прямоугольного сечения, соединенных с обмоткой якоря последовательно, и одной или двух катушек тонкого провода круглого сечения, включенных параллельно обмотке якоря. Катушки, включенные параллельно обмотке якоря, создают постоянную слагающую магнитного потока, которая почти не зависит от нагрузки стартера.
[c.39]
Катушки, включенные параллельно обмотке якоря, создают постоянную слагающую магнитного потока, которая почти не зависит от нагрузки стартера.
[c.39]
Работая в режиме электродвигателя на холостом ходу, генератор не отдает никакой полезной мощности, и вся потребляемая им электрическая энергия расходуется на покрытие собственных потерь. Измеряя силу потребляемого тока, проверяют величину потерь. Если имеет место тугое вращение ротора генератора из-за перекоса при сборке, неисправности шариковых подшипников, неудовлетворительного состояния смазки и других аналогичных причин, возрастают механические потери и, следовательно, возрастает сила потребляемого тока. Если в обмотке якоря или обмотке возбуждения имеется короткое замыкание, возрастают электрические потери и соответственно увеличивается сила тока. Таким образом проверка силы тока при этом испытании позволяет обнаружить ряд неисправностей генератора. Максимально допустимые значения силы тока в режиме холостого хода при проверке генераторов постоянного тока в режиме электродвигателя приведены в табл. 15.
[c.138]
Максимально допустимые значения силы тока в режиме холостого хода при проверке генераторов постоянного тока в режиме электродвигателя приведены в табл. 15.
[c.138]
Однопостовой сварочный преобразователь ПСО-500 состоит из двух мащин из приводного электродвигателя 2 и сварочного генератора ГСО-500 постоянного тока, расположенных в общем корпусе 1. Якорь 5 генератора и ротор электродвигателя расположены на общем валу, подшипники которого установлены в крышках корпуса преобразователя. На валу между электродвигателем и генератором находится вентилятор 3, предназначенный для охлаждения агрегата во время его работы. Якорь генератора набран из тонких пластин электротехнической стали толщиной до 1 мм и снабжен продольными пазами, в которых уложены изолированные витки обмотки якоря. Концы обмотки якоря припаяны к соответствующим пластинам коллектора 6. На полюсах магнитов на- [c.19]
Полуавтоматы ПП-1 и ПП-2, в которых перемещение резака производится механически, а движение направляется вручную при помощи различных приспособлений, широко применяют в промышленности и строительстве.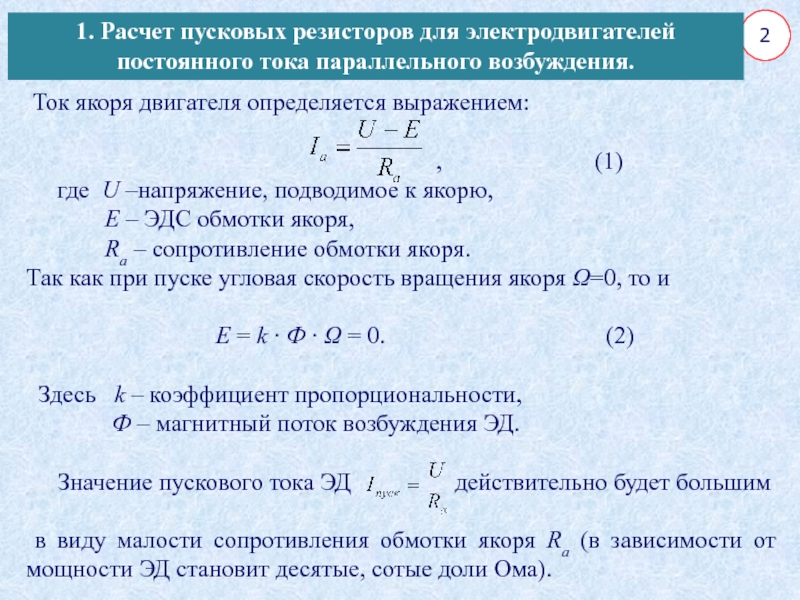 На корпусе машины ПП-1 (рис. 183, б) имеется суппорт, на котором укреплен резак. Внутри корпуса расположен механизм с системой зубчатых колес, соединенных с электродвигателем мощностью 50 Вт и передающих вращение валу ведущего ролика тележки. Скорость передвижения тележки можно регулировать, изменяя число оборотов вала электродвигателя посредством реостата, включенного в цепь обмотки якоря.
[c.359]
На корпусе машины ПП-1 (рис. 183, б) имеется суппорт, на котором укреплен резак. Внутри корпуса расположен механизм с системой зубчатых колес, соединенных с электродвигателем мощностью 50 Вт и передающих вращение валу ведущего ролика тележки. Скорость передвижения тележки можно регулировать, изменяя число оборотов вала электродвигателя посредством реостата, включенного в цепь обмотки якоря.
[c.359]
В графу 12-ю записываем начальный перегрев обмотки якоря тягового электродвигателя, который после длительной стоянки (свыше 2 ч) принимается Тд = 15° С. При меньших стоянках определяем по температуре в момент прибытия с учетом ее снижения за время стоянки. В графу 13-ю заносим результаты перемножения величин, записанных [c.159]
Стартер (рис. 57) служит для пуска двигателя и представляет собой четырехполюсный электродвигатель постоянного тока со смешанным включением обмотки возбуждения. Обмотки возбуждения двух полюсов включены в цепь последовательно с обмоткой якоря, а двух других — параллельно. Включение стартера — электромагнитное дистанционное при помощи тягового реле, установленного на корпусе стартера.
[c.91]
Включение стартера — электромагнитное дистанционное при помощи тягового реле, установленного на корпусе стартера.
[c.91]
При последовательном соединении ток от зажима Я главного генератора пойдет по обмоткам якорей двигателей 4, 5, 6, замкнутые контакты реверсора, по обмоткам возбуждения электродвигателей 6, 5, 4, через замкнутые контакты реверсора и контактора С, по обмоткам якорей электродвигателей 1, 2, 3, через замкнутые контакты реверсора, по обмоткам возбуждения электродвигателей 1, 2, 3 через замкнутые контакты реверсора и шунт ША2 на минусовую клемму генератора. [c.67]
Более высокими средними скоростями движения, что объясняется большими ускорениями при разгонах (большие ускорения могут быть достигнуты, например, путем использования двухколлекторных тяговых электродвигателей, обмотки якоря которых после достижения определенной скорости движения переключаются с последовательного соединения на параллельное) более высокие средние скорости, в свою очередь, позволяют ограничиться меньшим количеством подвижного состава и обслуживающего персонала.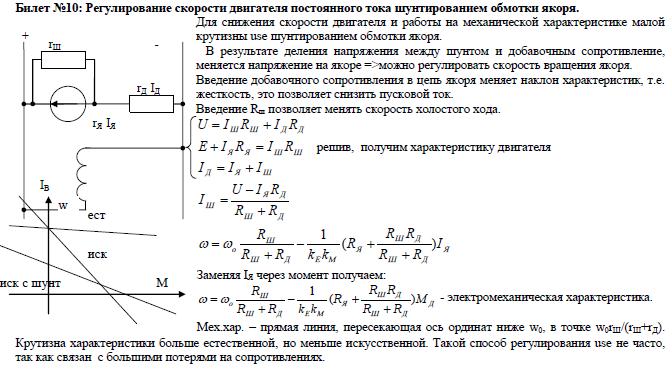 [c.909]
[c.909]
Сварочные генераторы. Это специальные генераторы постоянного тока, внешняя характеристика которых позволяет получать устойчивое горение дуги, что достигается изменением магнитного потока генератора в зависимости от сварочного тока. Сварочный генератор постоянного тока состоит из статора с магнитными полюсами и якоря с обмоткой и коллекторами. При работе генератора якорь вращается в магнитном поле, создаваемом полюсами статора. Обмотка якоря пересекает магнитные линии полюсов генератора, и поэтому в витках обмотки возникает переменный ток, который с помощью коллектора преобразуется в постоянный. -Вращение якоря сварочного генератора обеспечивается в сварочных преобразователях электродвигателем, а в сварочных агрегатах — двигателем внутреннего сгорания. К коллектору прижаты угольные щетки, через которые постоянный ток подводится к клеммам. К этим клеммам присоединяют сварочные провода, идущие к электрододержа-телю и изделию. [c.61]
Многие системы транспортных машин и летательных аппаратов имеют источники электроэнергии постоянного тока. В настоящее время начинают применяться бесколлекторные двигатели с полупроводниковым коммутатором, включающим ток в расположенные на статоре обмотки якоря, с постоянными магнитами возбуждения на роторе. Такие электродвигатели можно выполнять с диафрагмой-экраном и применять в полностью герметизированных агрегатах без уплотнений вала. Срок службы бескол-лекторных экранированных электродвигателей постоянного тока — не менее 5000 ч к. п. д. низок. Пока изготовляются двигатели малой мощности — 7,5 вт на 2000 — 3000 об мин [1].
[c.35]
В настоящее время начинают применяться бесколлекторные двигатели с полупроводниковым коммутатором, включающим ток в расположенные на статоре обмотки якоря, с постоянными магнитами возбуждения на роторе. Такие электродвигатели можно выполнять с диафрагмой-экраном и применять в полностью герметизированных агрегатах без уплотнений вала. Срок службы бескол-лекторных экранированных электродвигателей постоянного тока — не менее 5000 ч к. п. д. низок. Пока изготовляются двигатели малой мощности — 7,5 вт на 2000 — 3000 об мин [1].
[c.35]
Наружный цилиндр неподвижен. Внутренний цилиндр связан с ротором электродвигателя и вращается с постоянной скоростью. Обмотка якоря электродвигателя включена в самобалансирующуюся мостовую схему. Определяют изменение тока электродвигателя. Этот ток пропорционален крутящему моменту или напряжению сдвига. Пределы измерения вязкости от 5 10 до..0,3 н-сек-м . Скорость деформации изменяется в соотношении 1 2 4 8 16 (от 4 до 60 сек ) Рассмотрим схему работы прибора (рис. 77). На станине 1 прибора укреплен наружный цилиндр 2, окруженный термостатной рубашкой 3. Внутренний цилиндр 4 сочленен с якорем электродвигателя 5 через муфту 6. Зазор между внутренним и наружным цилиндром заполняют исследуемым материалом. Электродвигатель вместе с внутренним цилиндром посредством кремальеры 7 может быть поднят или опущен. Обмотка якоря электродвигателя включена в одно из плеч моста постоянного тока. В его соседнем уравнительном плече включены последовательно два сопротивления и равные сопротивлению якоря электродвигателя. Параллельно сопротивлению подключен набор сопротивлений. Каждое из них подбирают соответствующей величины и подсоединяют к мосту переключателем К- Эти сопротивления находятся под напряжением нормального элемента НЭ и предназначены для ступенчатого изменения скорости вращения ротора электродвигателя 5. В одну из диагоналей моста включен зеркальный галь-
[c.
Скорость деформации изменяется в соотношении 1 2 4 8 16 (от 4 до 60 сек ) Рассмотрим схему работы прибора (рис. 77). На станине 1 прибора укреплен наружный цилиндр 2, окруженный термостатной рубашкой 3. Внутренний цилиндр 4 сочленен с якорем электродвигателя 5 через муфту 6. Зазор между внутренним и наружным цилиндром заполняют исследуемым материалом. Электродвигатель вместе с внутренним цилиндром посредством кремальеры 7 может быть поднят или опущен. Обмотка якоря электродвигателя включена в одно из плеч моста постоянного тока. В его соседнем уравнительном плече включены последовательно два сопротивления и равные сопротивлению якоря электродвигателя. Параллельно сопротивлению подключен набор сопротивлений. Каждое из них подбирают соответствующей величины и подсоединяют к мосту переключателем К- Эти сопротивления находятся под напряжением нормального элемента НЭ и предназначены для ступенчатого изменения скорости вращения ротора электродвигателя 5. В одну из диагоналей моста включен зеркальный галь-
[c. 166]
166]
Для управления электродвигателем насоса вставляют ключ в гнездо выключателя XI цепи управления, если она не была включена. Включить электродвигатель насоса можно рукояткой наклона или рукояткой подъема и опускания груза. Рукояткой подъема и опускания груза электродвигатель включают только при подъеме. Та ким образом, при действии указанными выше рукоятками происходит замыкание включателя XXI, вследствие чего цепь катушки контактора XIX через замкнутые контакты концевого выключателя подъема XVII окажется замкнутой и это вызовет замыкание рабочих контактов контактора Х/Х. Рабочий ток от аккумуляторной батареи VI потечет через предохранитель щита XIII, контактор XIX, обмотку якоря, обмотку возбуждения электродвигателя // и затем через предохранитель щита XIII возвратится к аккумуляторной батарее VI, при этом электродвигатель придет в движение. [c.153]
От стартера требуется преодолеть пусковой момент на коленчатом валу при трогании с места маховика, стартер должен развивать в начале пуска наибольший крутящий момент. Такими тяговыми свойствами обладает электродвигатель, обмотка возбуждения которого в]ключена последовательно с якорем, т. е. электродвигатель сериесного типа ( 24).
[c.278]
Такими тяговыми свойствами обладает электродвигатель, обмотка возбуждения которого в]ключена последовательно с якорем, т. е. электродвигатель сериесного типа ( 24).
[c.278]
Электродвигатель состоит из стального корпуса 5 ци-линдрической формы с четырьмя полюсными сердечниками , вокруг которых расположена обмотка 5 возбуждения, и якоря 1, в пазах которого уложена обмотка 2. Ток от аккумуляторной батареи в обмотку якоря поступает с зажима 20 тягового реле 23 по соединительной шине 16, контактному болту 15 траверсы 9 щеткодержателей 6, через положительные щетки 7 и колектор 8. Далее ток отводится через отрицательные щетки 18 в обмотку возбуждения, а затем через перемычку 51 и контактный винт 29 на массу. Так как стартер потребляет очень большой ток, то обмотку возбуждения и обмотку якоря выполняют из толстого прямоугольного медного провода сечением 20—25 мм . По той же причине щетки изготовляют из материала, содержащего 90% меди, 4% графита и 6% свинца (щетки марки МГС). Соответственно числу полюсов электродвигатель стартера имеет четыре пары щеток, прижимаемых к коллектору спиральными пружинами 17 щеткодержателей 6. Вал 10 якоря вращается во втулках 13, 40 и 41 из пористой графитовой бронзы, которые запрессованы в переднюю крышку 12, во фланец 39 промежуточной опоры и в крышку 44 сцепляющего механизма. Крышки прижаты к корпусу стяжными болтами 11. Для смазки подшипников служат капельные масленки 14, 37 VI 38 с фитилями из крученой нити.
[c.116]
Соответственно числу полюсов электродвигатель стартера имеет четыре пары щеток, прижимаемых к коллектору спиральными пружинами 17 щеткодержателей 6. Вал 10 якоря вращается во втулках 13, 40 и 41 из пористой графитовой бронзы, которые запрессованы в переднюю крышку 12, во фланец 39 промежуточной опоры и в крышку 44 сцепляющего механизма. Крышки прижаты к корпусу стяжными болтами 11. Для смазки подшипников служат капельные масленки 14, 37 VI 38 с фитилями из крученой нити.
[c.116]
Электродвигатель стартера проверяют в режиме холостого хода и полного торможения. Параметры режима холостого хода (частота вращения и потребляемый ток) позюляют судить о качестве сборки и механических неисправностях. Наличие дефектов (тугое вращение вала в подшипниках и др.) вызывает увеличение потребляемой мощности при холостом ходе, вследствие чего ток холостого хода увеличивается, а частота вращения якоря упадет ниже нормы. В режиме холостого хода проявляются также и электрические неисправности. Так, увеличение силы тока и уменьшение частоты вращения якоря может быть следствием межвиткоюго замыкания обмотки якоря, а межвитковое замыкание обмотки возбуждения приводит к повышению частоты вращения якоря. Выявляются электрические неисправности в режиме полного торможения. Параметры режима полного торможения (крутящий момент, потребляемый ток) позволяют определить состояние электрической части стартера. При плохом контакте между щетками и коллектором потребляемый ток и крутящий момент уменьшаются ниже нормы. Замыкание обмоток якоря на корпус или замыкание в обмотке возбуждения приводят к снижению крутящего момента при возросшем против нормы потребляемом токе.
[c.169]
Так, увеличение силы тока и уменьшение частоты вращения якоря может быть следствием межвиткоюго замыкания обмотки якоря, а межвитковое замыкание обмотки возбуждения приводит к повышению частоты вращения якоря. Выявляются электрические неисправности в режиме полного торможения. Параметры режима полного торможения (крутящий момент, потребляемый ток) позволяют определить состояние электрической части стартера. При плохом контакте между щетками и коллектором потребляемый ток и крутящий момент уменьшаются ниже нормы. Замыкание обмоток якоря на корпус или замыкание в обмотке возбуждения приводят к снижению крутящего момента при возросшем против нормы потребляемом токе.
[c.169]
Схема соединений обмоток электродвигателя показана на рис. 2 ( монтажную схему подключения электродвигателей см. на рис. 18, помещенном в конце книги). Обмотка якоря петлевая, вювбуждение — компа-ундное. [c.13]
Вспомогательные электрические машины — двигатели компрессоров и вентиляторов, преобразователи, мотор-генераторы, генераторы тока управления — по конструкции близки между собой. Для обмотки якорей и катушек вспомогательных машин используют изолированную проволоку прямоугольного или круглого сечения. В отличие от тяговых электродвигателей вспомогательные машины самовенти-лируемые, т. е. имеют на валу якоря стальной вентилятор.
[c.19]
Для обмотки якорей и катушек вспомогательных машин используют изолированную проволоку прямоугольного или круглого сечения. В отличие от тяговых электродвигателей вспомогательные машины самовенти-лируемые, т. е. имеют на валу якоря стальной вентилятор.
[c.19]
Электропоезд ЭР2. В качестве приводных для вспомогательных мащин на этом электропоезде применены коллекторные электродвигатели постоянного тока, поэтому рассмотренные выше неисправности тяговых двигателей (ухудшение ко.ммутации, обрывы и замыкания витков обмотки якоря и полюсов и т. д.) могут иметь место и в электродвигателях вспомогательных. машин. [c.217]
На всех Советских электровозах (так же, как и на тепловозах) установлены тяговые электродвигатели последовательного типа, у которых обмотки возбуждения (полюсов) соединены последовательно с обмоткой якоря (рис. 23). Тяговые характеристики электровозов составляют на основе их испй-таний. Однако возможно их построение с помощью электромеханических характеристик тяговых электродвигателей, получаемых при стендовых испытаниях последних.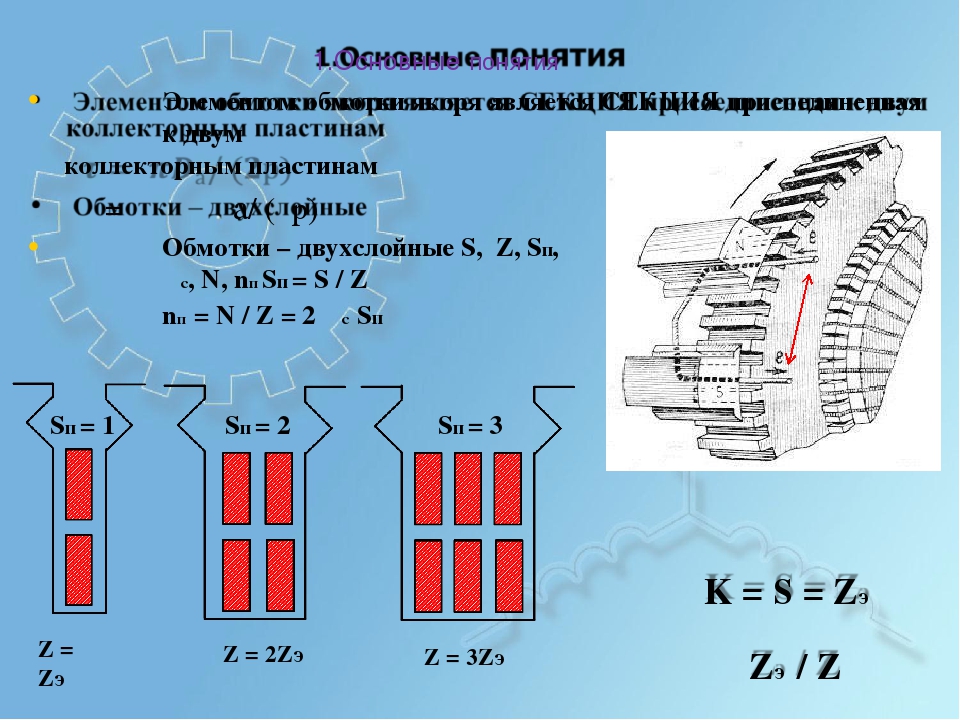 [c.49]
[c.49]
Рассмотрим технику вычисления температуры перегрева обмотки якоря тягового электродвигателя ЭД-104А тепловоза 2ТЭ10 на перегоне А—а, используя построенную кривую тока (см. рис. 79). Все расчеты по перегреву сводим в табл. 8 и ведем их следующим образом. [c.157]
В стартерах с последовательным возбуждением (/ ст — сопротавление стартера) сопротивление обмотки якоря Ля обычно составляет (0,45. . . 0,65) Лет. Плотность тока в обмотке якоря не должна превышать 28. .. 30 А/мм (в стартерах с редукторами — 40. .. 45 А/мм ). Полузакрытые или закрытые пазы якорей могут иметь прямоугольную или грушевидную форму (рис. 5.9). При прямоугольной форме паза обеспечивается лучше его заполнение прямоугольным проводом. С грушевидной формой пазов изготовляют якоря электродвигателей с двухвитковыми секциями. Одновитмовые секции закладываются в пазы с торца. пакета якоря. В пазах проводники изолируют друг от друга и от пакета якоря электроизоляционным картоном толщиной 0,2. .. 0,4 мм.
[c.123]
.. 0,4 мм.
[c.123]
Для электрических машин характерны два основных режима работы: двигательный и тормозной.
Необходимость использования электрических способов торможения в электроприводах грузоподъемных механизмов вызывается спецификой их работы.
Для электродвигателей с параллельным возбуждением возможно использование трех тормозных режимов:
а) генераторного с отдачей энергии в сеть;
б) электродинамического;
в) противовключения (противотока).
Генераторный режим с отдачей энергии в сеть. Как указывалось, при работе электродвигателя на естественной или искусственной характеристике в двигательном режиме наводимая в обмотке якоря противо э. д. с. всегда меньше приложенного напряжения (Е<U) и ток в обмотке якоря
Этот ток создает вращающий момент электродвигателя М = кФIя, совпадающий с направлением вращения якоря. На холостом ходу электродвигателя, когда момент сопротивления на валу отсутствует, ток в обмотке якоря должен быть равен нулю, т.
Таким образом, при изменениях числа оборотов электродвигателя от 0 до n0 противо э. д. с., наводимая в обмотке якоря, всегда меньше приложенного напряжения (или, в крайнем случае, равна ему) и ток в обмотке якоря, согласно выражению (22), положителен, что характерно для двигательного режима работы машины.
Если же под действием внешнего момента, например момента, созданного весом поднятого груза, число оборотов электродвигателя станет больше п0, его противо э. д. с. превысит приложенное напряжение и ток в обмотке якоря, согласно выражению (22), изменит направление, т. е. машина из потребителя электрической энергии превратится в ее источник. Очевидно, что при изменении направления тока меняется и направление момента, создаваемого электродвигателем. Этот момент становится тормозным и уравновешивает внешний момент, приложенный к валу электродвигателя.
т. е. характеристики генераторного режима являются продолжением характеристик двигательного режима машины и располагаются во II или в IV квадрантах (рис. 16). Нетрудно заметить, что при введении дополнительных сопротивлений в цепь якоря, скорость электродвигателя в генераторном режиме не уменьшается, а, наоборот, увеличивается.
Данный способ электрического торможения весьма выгоден в экономическом отношении, так как он позволяет возвращать в сеть значительную часть электроэнергии, затраченную, например, на подъем груза. Однако он осуществим лишь при повышенных скоростях, намного превышающих номинальную скорость электродвигателя, и поэтому не всегда применим. Торможение с отдачей энергии в сеть не может быть применимо для остановки привода, так как пторм должно быть всегда больше п0.
Режим электродинамического торможения. Несмотря на значительный экономический эффект, торможение с отдачей энергии в сеть применяется сравнительно редко, что объясняется указанными выше недостатками этого способа торможения. Чаще попользуется так называемое электродинамическое торможение, которое может применяться как для ограничения скорости спуска грузов, так и для ускорения остановки привода.
Под режимом динамического торможения понимается режим, возникающий при отключении вращающегося якоря от сети и замыкании его на сопротивление, называемое сопротивлением динамического торможения Rд.
Указанные уравнения можно получить из выражений (27) и (32), положив в них U = 0 и заменив R на Rд. Уравнения (46) и (47) показывают, что характеристики электродвигателей параллельного возбуждения в режиме динамического торможения прямолинейны и проходят через начало координат (см. рис. 17). Очевидно, что большим сопротивлениям Rд соответствуют более мягкие характеристики, а при одной и той же скорости — меньшие тормозные моменты и токи.
Рассмотрим особенности динамического режима на примере электропривода механизма подъема. При подъеме груза контакты Л должны быть замкнуты, а контакт Т разомкнут.
Электродвигатель обладает определенной инерцией, поэтому он, не изменяя скорости вращения, из точки 1 переходит в точку 2 или 2′ на характеристике с в зависимости от величины сопротивления Rд. При этом меняется направление момента и электродвигатель начинает интенсивно тормозиться. При снижении скорости до нуля контакт Т нужно разомкнуть и включить механический тормоз. Если же контакт Т не будет разомкнут, то под действием груза электродвигатель начнет вращаться в обратную сторону, производя спуск груза в режиме динамического торможения.
Устойчивая работа электродвигателя будет в точке 3 или 5, так как при работе в этих точках М = Мс. Таким образом, режим динамического торможения может быть использован не только для остановки, но и для получения определенной установившейся скорости. В рассматриваемом случае при спуске груза вращающий момент, развиваемый электродвигателем, по величине и по знаку такой же, как и при подъеме. Однако направление скорости при переходе через точку О изменилось, поэтому момент, развиваемый электродвигателем при спуске груза, будет тормозным моментом, ограничивающим скорость спуска. Груз будет опускаться с устойчивой скоростью — n3 или n2.
Данный способ торможения отличается простотой, не требует сложных переключений в схеме; он позволяет регулировать время торможения или скорости спуска груза путем регулирования величины сопротивления Rд.
Главным недостатком рассматриваемого способа следует считать довольно значительное время торможения, так как при малых оборотах значения тормозного момента очень невелики и этот способ нельзя считать целесообразным при необходимости быстрой остановки электропривода.
Режим противовключекия. Для осуществления торможения электроприводов подъемно-транспортных машин нередко используется режим противовключения, под которым понимается такой режим, когда электродвигатель, будучи включен в сеть, вращается в сторону, противоположную той, в которой он вращался бы при таком же включении в двигательном режиме.
Допустим, электродвигатель включен по схеме, показанной на рис. 18, а и, поднимая груз, работает на естественной характеристике а в точке 1 (рис. 18, б) при М = Мc (замкнуты контакты 1В, 2В и П). При размыкании контакта П в цепи электродвигателя окажется включенным дополнительное сопротивление Rт и электродвигатель перейдет на искусственную характеристику b в точке 2 (см. рис. 18, б). Так как момент, развиваемый в точке 2, будет меньше момента сил сопротивления (М<Мc), то скорость электродвигателя начнет быстро снижаться и в точке 3 станет равной 0. Если требуется остановить электродвигатель, то при скорости n = 0 его следует отключить от сети.
В рассматриваемом случае при переходе электродвигателя в режим противовключения скорость меняет свой знак, знак же момента (и тока) остается неизменным по сравнению с двигательным режимом. Это и обусловливает эффект торможения. Машина превращается в источник электроэнергии, которая расходуется в сопротивлениях цепи якоря.
В тех случаях, когда направление момента сопротивления на валу электродвигателя определяется направлением его вращения, режим противовключения указанным выше способом получить невозможно. В этом случае для ускорения остановки или быстрого реверса привода необходимо произвести переключение обмотки якоря.
Предположим, что в схеме на рис. 18, а замкнуты контакты 1В, 2В и П и электродвигатель работает устойчиво на естественной характеристике а в точке 1 (рис. 18, в) при М=Мc. Для осуществления быстрого торможения или реверса нужно разомкнуть контакты 1В и 2В и замкнуть контакты 1Н и 2Н. При этом направление тока, а следовательно, и момента изменяется и электродвигатель окажется в тормозном режиме противовключения.
Если требуется остановить электродвигатель, то при скорости n = 0 его следует отключить от сети; если же необходимо произвести реверс, то при n = 0 отключают сопротивление Rт, после него начинается обычный пуск электродвигателя в противоположную сторону.
Торможение противовключением является довольно эффективным для механизмов горизонтального передвижения мостов и тележек кранов и механизмов поворота.
где R —сопротивление пускового реостата.
Изменение направления вращения. Изменение направления вращения (реверс) электродвигателя с параллельным возбуждением может быть осуществлено двумя способами: изменением направления тока в обмотке возбуждения или изменением направления тока в обмотке якоря. И в том, и в другом случае изменяется направление вращающего момента, согласно выражению (5), что и обусловливает реверс электродвигателя. На практике обычно используют второй способ, обеспечивающий более быстрое изменение направления вращения. Объясняется это следующим:
а) размыкание цепи возбуждения требует предварительного .размыкания цепи якоря, что связано с усложнением аппаратуры. Размыкание якоря необходимо для предотвращения чрезмерного увеличения тока в нем при уменьшении магнитного потока;
б) обмотка возбуждения электродвигателя параллельного возбуждения обладает значительной индуктивностью и разрыв ее связан с опасностью пробоя изоляции;
в) при изменении направления тока в обмотке возбуждения происходит перемагничивание машины, что увеличивает продолжительность операции и приводит к дополнительным потерям энергии, особенно при частых реверсах.
Практически для осуществления реверса электродвигателя с параллельным возбуждением указанным способом служат контакты 1В, 2В, 1Н и 2Н (см. рис. 18, а). При работе электродвигателя замкнуты попарно либо контакты 1В и 2В, либо 1Н и 2Н. Их переключение приводит, как видно из схемы, к изменению направлении тока в обмотке якоря, а последнее к изменению направления вращения электродвигателя. |
 Торможение позволяет облегчить работу механических тормозов, получить устойчивые постоянные скорости спуска грузов, а также обеспечивает ускоренную остановку приводов.
Торможение позволяет облегчить работу механических тормозов, получить устойчивые постоянные скорости спуска грузов, а также обеспечивает ускоренную остановку приводов. е. в этом случае противо э. д. с. равна приложенному напряжению:
е. в этом случае противо э. д. с. равна приложенному напряжению: Это означает, что в уравнениях скоростной и механической характеристик знак минус меняется на плюс
Это означает, что в уравнениях скоростной и механической характеристик знак минус меняется на плюс Опытные крановщики чаще всего используют данный способ торможения при погрузке судов, когда высота подъема груза значительно меньше высоты спуска. Осуществляя в данном случае спуск груза в генераторном режиме с отдачей энергии в сеть, можно получить ощутимую экономию электроэнергии и улучшить тем самым экономические показатели.
Опытные крановщики чаще всего используют данный способ торможения при погрузке судов, когда высота подъема груза значительно меньше высоты спуска. Осуществляя в данном случае спуск груза в генераторном режиме с отдачей энергии в сеть, можно получить ощутимую экономию электроэнергии и улучшить тем самым экономические показатели. схеме, показанной на рис. 17, это осуществляется размыканием контактов Л, которые были замкнуты в двигательном режиме, и замыканием контакта Т. В этом случае уравнения скоростной и механической характеристик примут вид:
схеме, показанной на рис. 17, это осуществляется размыканием контактов Л, которые были замкнуты в двигательном режиме, и замыканием контакта Т. В этом случае уравнения скоростной и механической характеристик примут вид: Допустим, электродвигатель, поднимая груз, работает устойчиво в точке 1 на естественной характеристике а (М = Мс) со скоростью +п1. При размыкании контактов Л и замыкании контакта Т электродвигатель должен перейти на искусственную характеристику b, проходящую через начало координат.
Допустим, электродвигатель, поднимая груз, работает устойчиво в точке 1 на естественной характеристике а (М = Мс) со скоростью +п1. При размыкании контактов Л и замыкании контакта Т электродвигатель должен перейти на искусственную характеристику b, проходящую через начало координат.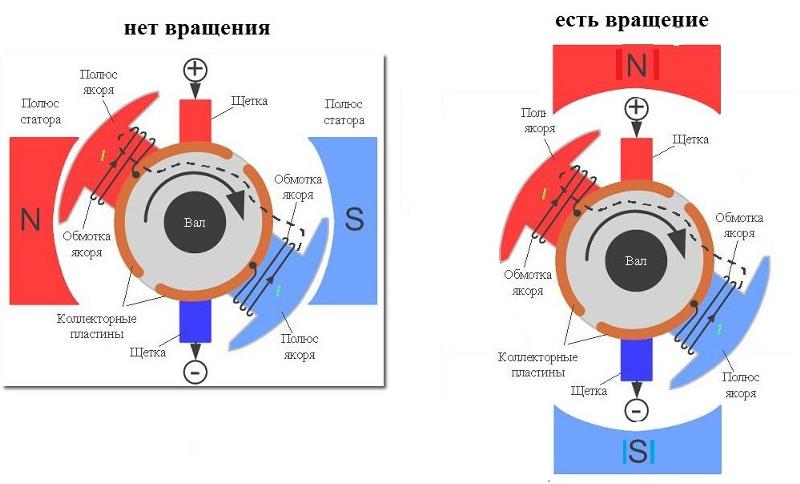
 Для осуществления торможения данным способом почти не требуется никаких затрат энергии, так как практически процесс торможения заключается в том, что машина работает как генератор с независимым возбуждением, замкнутый на сопротивление Rд. На вал электрической машины передается механическая энергия от затормаживаемого механизма. В машине она преобразуется в электрическую энергию, а последняя — в тепловую в обмотках машины и в сопротивлении Rд.
Для осуществления торможения данным способом почти не требуется никаких затрат энергии, так как практически процесс торможения заключается в том, что машина работает как генератор с независимым возбуждением, замкнутый на сопротивление Rд. На вал электрической машины передается механическая энергия от затормаживаемого механизма. В машине она преобразуется в электрическую энергию, а последняя — в тепловую в обмотках машины и в сопротивлении Rд.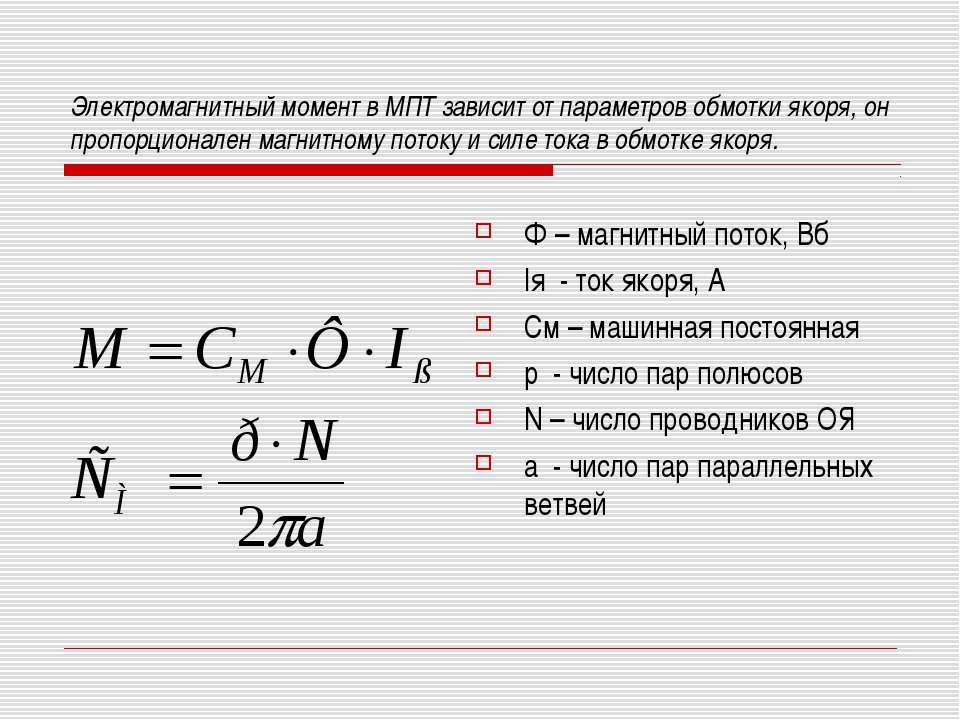 Такой способ торможения может применяться для ограничения скорости спуска грузов и ускорения остановки привода.
Такой способ торможения может применяться для ограничения скорости спуска грузов и ускорения остановки привода. Если же электродвигатель не будет отключен от сети, то иод действием груза он начнет разгоняться в противоположную сторону. По мере разгона электродвигателя возрастает тормозной момент на его валу и при числе оборотов— n2 (точка 4) он станет равным моменту, создаваемому весом поднятого груза. Работа электродвигателя в точке 4 на характеристике b будет устойчивой и скорость спуска груза будет ограничена величиной —n2. Скорость спуска в данном случае можно регулировать изменением величины дополнительного сопротивления Rт, вводимого в цепь якоря. Чем выше величина этого сопротивления, тем мягче характеристика b и тем выше будет скорость спуска груза.
Если же электродвигатель не будет отключен от сети, то иод действием груза он начнет разгоняться в противоположную сторону. По мере разгона электродвигателя возрастает тормозной момент на его валу и при числе оборотов— n2 (точка 4) он станет равным моменту, создаваемому весом поднятого груза. Работа электродвигателя в точке 4 на характеристике b будет устойчивой и скорость спуска груза будет ограничена величиной —n2. Скорость спуска в данном случае можно регулировать изменением величины дополнительного сопротивления Rт, вводимого в цепь якоря. Чем выше величина этого сопротивления, тем мягче характеристика b и тем выше будет скорость спуска груза. В этих же сопротивлениях, а также в обмотке возбуждения расходуется та электроэнергия, которая поступает из сети.
В этих же сопротивлениях, а также в обмотке возбуждения расходуется та электроэнергия, которая поступает из сети. Чтобы избежать при этом большого толчка тока и момента, необходимо одновременно с контактами 1В и 2В разомкнуть контакты П, что приводит к введению дополнительного сопротивления. Тогда при замыкании контактов 1Н и 2Н электродвигатель переходит на характеристику b, проходящую через точку — n0. Вначале электродвигатель перейдет на работу, соответствующую точке 2 на характеристике b. Так как момент электродвигателя и статический момент не соответствуют направлению скорости, последняя начинает быстро уменьшаться и в точке 3 станет равной нулю.
Чтобы избежать при этом большого толчка тока и момента, необходимо одновременно с контактами 1В и 2В разомкнуть контакты П, что приводит к введению дополнительного сопротивления. Тогда при замыкании контактов 1Н и 2Н электродвигатель переходит на характеристику b, проходящую через точку — n0. Вначале электродвигатель перейдет на работу, соответствующую точке 2 на характеристике b. Так как момент электродвигателя и статический момент не соответствуют направлению скорости, последняя начинает быстро уменьшаться и в точке 3 станет равной нулю.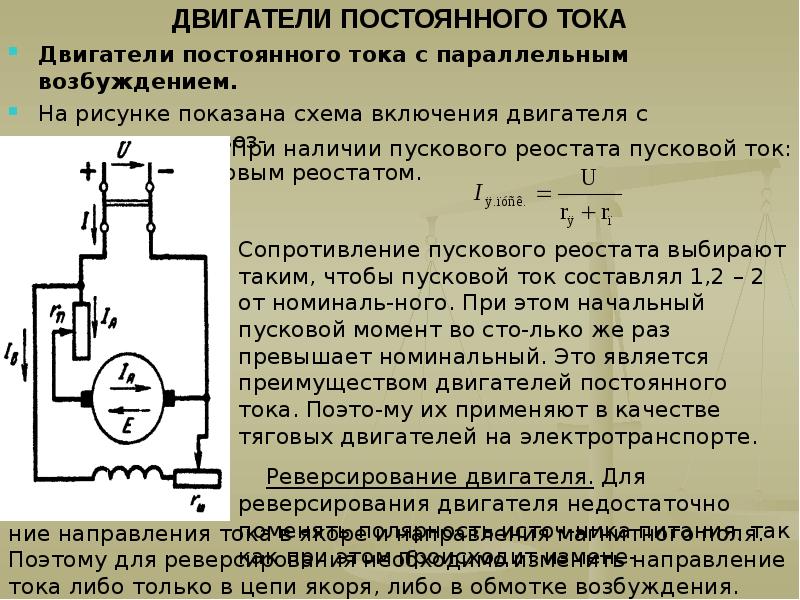 Оно применяется также для торможения механизмов подъема, особенно при спуске тяжелых грузов. Однако с экономической точки зрения режим противовключения не является выгодным, так как в обмотках машины и дополнительном сопротивлении в тепло превращается не только энергия торможения, но и энергия, подводимая от сети. Дополнительное сопротивление Rт должно быть приблизительно равно полному сопротивлению пускового реостата. Это связано с тем, что в режиме противовключения э. д. с. обмотки якоря совпадает по направлению с приложенным напряжением и для ограничения токов, возникающих при этом режиме, необходимо значительное сопротивление. Это означает, что для снижения тока, возникающего в момент перевода электродвигателя в режим противовключения, до допустимых значений в цепь якоря электродвигателя необходимо включать не только дополнительное сопротивление Rт, но и пусковой реостат. При этом тон в обмотке якоря, согласно выражению (22), будет
Оно применяется также для торможения механизмов подъема, особенно при спуске тяжелых грузов. Однако с экономической точки зрения режим противовключения не является выгодным, так как в обмотках машины и дополнительном сопротивлении в тепло превращается не только энергия торможения, но и энергия, подводимая от сети. Дополнительное сопротивление Rт должно быть приблизительно равно полному сопротивлению пускового реостата. Это связано с тем, что в режиме противовключения э. д. с. обмотки якоря совпадает по направлению с приложенным напряжением и для ограничения токов, возникающих при этом режиме, необходимо значительное сопротивление. Это означает, что для снижения тока, возникающего в момент перевода электродвигателя в режим противовключения, до допустимых значений в цепь якоря электродвигателя необходимо включать не только дополнительное сопротивление Rт, но и пусковой реостат. При этом тон в обмотке якоря, согласно выражению (22), будет

преимущества и недостатки разных видов
Лабораторные работы
→ номер 10
Изучение электрического двигателя постоянного тока (на модели).
Цель работы:
Ознакомиться с основными деталями электрического двигателя постоянного тока на модели этого двигателя.
Это, пожалуй, самая несложная работа за курс 8 класса. Нужно только подключить модель двигателя к источнику тока, посмотреть, как она работает, и запомнить названия основных частей электродвигателя (якорь, индуктор, щетки, полукольца, обмотка, вал).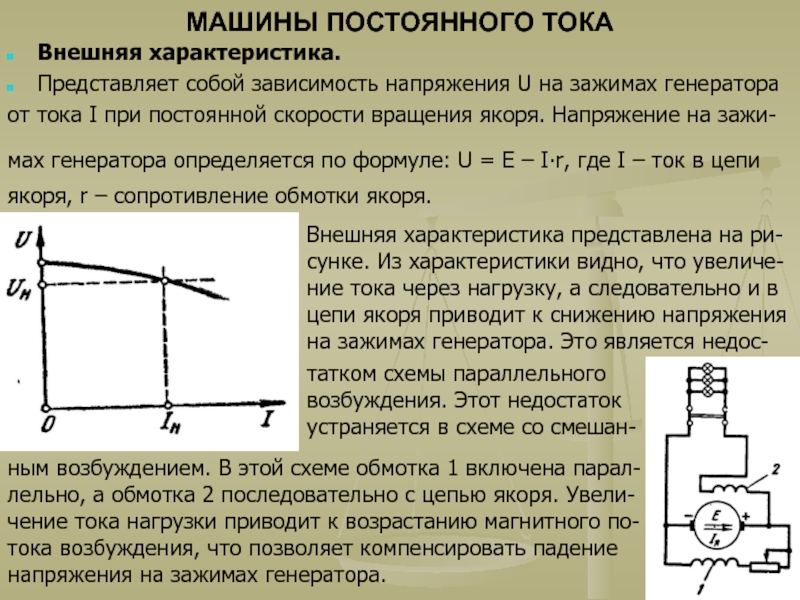
Предложенный вам учителем электродвигатель может быть похож на изображенный на рисунке, а может иметь другой вид, поскольку вариантов школьных электрических двигателей существует много. Принципиального значения это не имеет, так как учитель наверняка подробно расскажет и покажет, как обращаться с моделью.
Перечислим основные причины того, что правильно подключенный электродвигатель не работает. Обрыв цепи, отсутствие контакта щеток с полукольцами, повреждение обмотки якоря. Если в первых двух случаях вы вполне способны справится самостоятельно, в случае обрыва обмотки нужно обратиться к преподавателю. Перед включением двигателя следует убедиться, что его якорь может свободно вращаться и ему ничего не мешает, иначе при включении электродвигатель будет издавать характерное гудение, но вращаться не будет.
Чтобы пользоваться предварительным просмотром презентаций создайте себе аккаунт (учетную запись) Google и войдите в него: https://accounts.google.com
Подписи к слайдам:
На рисунках определите направление силы Ампера, направления тока в проводнике, направления линий магнитного поля, полюса магнита. N S F = 0 Вспомним.
N S F = 0 Вспомним.
Лабораторная работа № 11 Изучение электрического двигателя постоянного тока (на модели). Цель работы: познакомиться на модели электродвигателя постоянного тока с его устройством и работой. Приборы и материалы: модель электродвигателя, лабораторный источник питания, ключ, соединительные провода.
Правила техники безопасности. На столе не должно быть никаких посторонних предметов. Внимание! Электрический ток! Изоляция проводников должна быть не нарушена. Не включайте цепь без разрешения учителя. Не прикасайтесь руками к вращающимся деталям электродвигателя. Длинные волосы необходимо убрать так, чтобы они не попали во вращающиеся части двигателя. После выполнения работы рабочее место привести в порядок, цепь разомкнуть и разобрать.
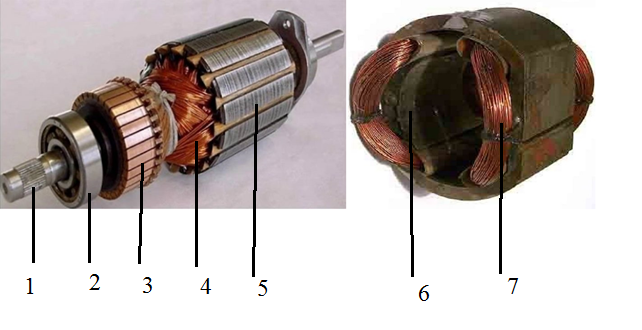
Порядок выполнения работы. 1.Рассмотрите модель электродвигателя. Укажите на рисунке 1 основные его части. 1 2 3 Рис.1 4 5 1 — ______________________________ 2 — ______________________________ 3 — ______________________________ 4 — ______________________________ 5 — ______________________________
2. Соберите электрическую цепь, состоящую из источника тока, модели электродвигателя, ключа,соединив все последовательно. Начертите схему цепи.
Соберите электрическую цепь, состоящую из источника тока, модели электродвигателя, ключа,соединив все последовательно. Начертите схему цепи.
3. Приведите двигатель во вращение. Если двигатель не работает, найдите причины и устраните их. 4. Измените направление тока в цепи. Наблюдайте за вращением подвижной части электродвигателя. 5.Сделайте вывод.
Литература: 1 . Физика. 8 кл.:учеб. для общеобразоват. учреждений/А.В.Перышкин.-4-е изд., доработ.-М.:Дрофа, 2008. 2 . Физика. 8 кл.:учеб. Для общеобразоват. учреждений/ Н.С.Пурышева, Н.Е.Важеевская.-2-е изд., стереотип.-М.:Дрофа, 2008 . 3 . Лабораторные работы и контрольные задания по физике: Тетрадь для учащихся 8-го класса.-Саратов: Лицей, 2009. 4 .Тетрадь для лабораторных работ. Сарахман И.Д. МОУ СОШ №8 г.Моздока РСО-Алания. 5 .Лабораторные работы в школе и дома: механика/ В.Ф.Шилов.-М.:Просвещение, 2007. 6 .Сборник задач по физике. 7-9 классы: пособие для учащихся общеобразоват. учреждений/ В.И.Лукашик, Е.В. Иванова.-24-е изд. -М.:Просвещение, 2010.
-М.:Просвещение, 2010.
Предварительный просмотр:
Лабораторная работа № 11
(на модели)
Цель работы
Приборы и материалы
Ход работы.
Лабораторная работа № 11
Изучение электрического двигателя постоянного тока
(на модели)
Цель работы
: познакомиться на модели электродвигателя постоянного тока с его устройством и работой.
Приборы и материалы
: модель электродвигателя, лабораторный источник питания, ключ, соединительные провода.
Правила техники безопасности.
На столе не должно быть никаких посторонних предметов. Внимание! Электрический ток! Изоляция проводников должна быть не нарушена. Не включайте цепь без разрешения учителя. Не прикасайтесь руками к вращающимся деталям электродвигателя.
Тренировочные задания и вопросы
1.На каком физическом явлении основано действие электрического двигателя?
2.Каковы преимущества электрических двигателей по сравнению с тепловыми?
3. Где используется электрические двигатели постоянного тока?
Ход работы.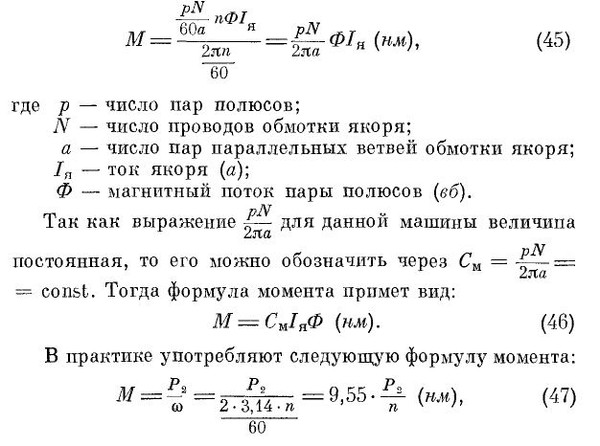
1.Рассмотрите модель электродвигателя. Укажите на рисунке 1 основные его части.
2.Соберите электрическую цепь, состоящую из источника тока, модели электродвигателя, ключа,соединив все последовательно. Начертите схему цепи.
Рис.1
Сделайте вывод.
3. Приведите двигатель во вращение. Если двигатель не работает, найдите причины и устраните их.
4. Измените направление тока в цепи. Наблюдайте за вращением подвижной части электродвигателя.
Рис.1
Условие задачи: Лабораторная работа № 10. Изучение электрического двигателя постоянного тока (на модели).
Задача из
решебника по Физике, 8 класс, А.В.Перышкин, Н.А.Родина
за 1998 год
Онлайн решебник по физике
за 8 класс
Лабораторные работы
— номер
10
Изучение электрического двигателя постоянного тока (на модели).
Цель работы: Ознакомиться с основными деталями электрического двигателя постоянного тока на модели этого двигателя.
Это, пожалуй, самая несложная работа за курс 8 класса. Нужно только подключить модель двигателя к источнику тока, посмотреть, как она работает, и запомнить названия основных частей электродвигателя (якорь, индуктор, щетки, полукольца, обмотка, вал).
Нужно только подключить модель двигателя к источнику тока, посмотреть, как она работает, и запомнить названия основных частей электродвигателя (якорь, индуктор, щетки, полукольца, обмотка, вал).
Предложенный вам учителем электродвигатель может быть похож на изображенный на рисунке, а может иметь другой вид, поскольку вариантов школьных электрических двигателей существует много. Принципиального значения это не имеет, так как учитель наверняка подробно расскажет и покажет, как обращаться с моделью.
Перечислим основные причины того, что правильно подключенный электродвигатель не работает. Обрыв цепи, отсутствие контакта щеток с полукольцами, повреждение обмотки якоря. Если в первых двух случаях вы вполне способны справится самостоятельно, в случае обрыва обмотки нужно обратиться к преподавателю. Перед включением двигателя следует убедиться, что его якорь может свободно вращаться и ему ничего не мешает, иначе при включении электродвигатель будет издавать характерное гудение, но вращаться не будет.
Не знаете как решить? Можете помочь с решением? Заходите и спрашивайте.
←Лабораторная работа № 9. Сборка электромагнита и испытание его действия.Лабораторная работа № 11. Получение изображения при помощи линзы.-
изучить
устройство, принцип действия,
характеристики электродвигателя
постоянного тока;
приобрести
практические навыки пуска, эксплуатации
и остановки электродвигателя постоянного
тока;
экспериментально
исследовать теоретические сведения о
характеристиках электродвигателя
постоянного тока.
Основные теоретические положения
Электродвигатель постоянного тока —
электрическая машина, предназначенная
для преобразования электрической
энергии в механическую.
Устройство электродвигателя постоянного
тока не имеет отличий от генератора
постоянного тока. Это обстоятельство
делает электрические машины постоянного
тока обратимыми, то есть позволяет их
использовать как в генераторном, так и
в двигательном режимах. Конструктивно
электродвигатель постоянного тока
имеет неподвижные и подвижные элементы,
которые показаны на рис. 1.
1.
Неподвижная часть — статор 1 (станина)
изготовлен из стального литья, состоит
из главных 2 и дополнительных 3 полюсов
с обмотками возбуждения 4
и 5 и
щеточной траверсой со щетками. Статор
выполняет функцию магнитопровода. С
помощью главных полюсов создается
постоянное во времени и неподвижное в
пространстве магнитное поле. Дополнительные
полюсы размещаются между главными
полюсами и улучшают условия коммутации.
Подвижной частью электродвигателя
постоянного тока является ротор 6
(якорь), который размещается на вращающемся
вале. Якорь также играет роль магнитопровода.
Он набран из тонких, электрически
изолированных друг от друга, тонких
листов электротехнической стали с
повышенным содержанием кремния, что
позволяет уменьшить потери мощности.
В пазах якоря запрессованы обмотки 7,
выводы которых соединяются с пластинами
коллектора 8, размещенными на этом же
вале электродвигателя (см. рис. 1).
Рассмотрим принцип работы электродвигателя
постоянного тока. Подключение постоянного
напряжения к зажимам электрической
машины вызывает одновременное
возникновение в обмотках возбуждения
(статора) и в обмотках якоря тока (рис. 2).
2).
В результате взаимодействия тока якоря
с магнитным потоком, создаваемым обмоткой
возбуждения в статоре возникает сила
f
, определяемая по закону Ампера.
Направление этой силы определяется
правилом левой руки (рис. 2), согласно
которому она ориентируется перпендикулярно
как к токуi
(в обмотке якоря), так и
к вектору магнитной индукции В
(создаваемой обмоткой возбуждения). В
результате на ротор действует пара сил
(рис. 2). На верхнюю часть
ротора сила действует вправо, на
нижнюю – влево. Эта пара сил создает
вращающий момент, под действием которого
якорь приводится во
вращение. Величина возникающего
электромагнитного момента оказывается
равной
M
= c
м I
я Ф
,
где с
м — коэффициент, зависящий от
конструкции обмотки якоря и числа
полюсов электродвигателя;Ф
—
магнитный поток одной пары главных
полюсов электродвигателя;I
я —
ток якоря двигателя. Как следует
из рис. 2, поворот обмоток якоря
сопровождается одновременным изменением
полярности на коллекторных пластинах.
Направление тока в витках обмотки якоря
изменяется на противоположное, но
магнитный поток обмоток возбуждения
сохраняет прежнее направление, что и
обусловливает неизменность направления
силf
, а значит, и вращательного
момента.
Вращение якоря в магнитном поле приводит
к появлению в его обмотке ЭДС, направление
которой определяется уже по правилу
правой руки. В результате для представленной
на рис. 2 конфигурации полей и сил в
обмотке якоря возникнет индукционный
ток, направленный противоположно
основному току. Поэтому возникающая
ЭДС называется противоЭДС. Величина ее
равна
E
= с
e nФ
,
где n
— частота вращения якоря
электродвигателя;с
e —
коэффициент, зависящий от конструктивных
элементов машины. Эта ЭДС
ухудшает рабочие характеристики
электродвигателя.
Ток в якоре создает магнитное поле,
которое воздействует на магнитное поле
главных полюсов (статора), что называется
реакцией якоря. В режиме холостого хода
машины магнитное поле создается только
главными полюсами.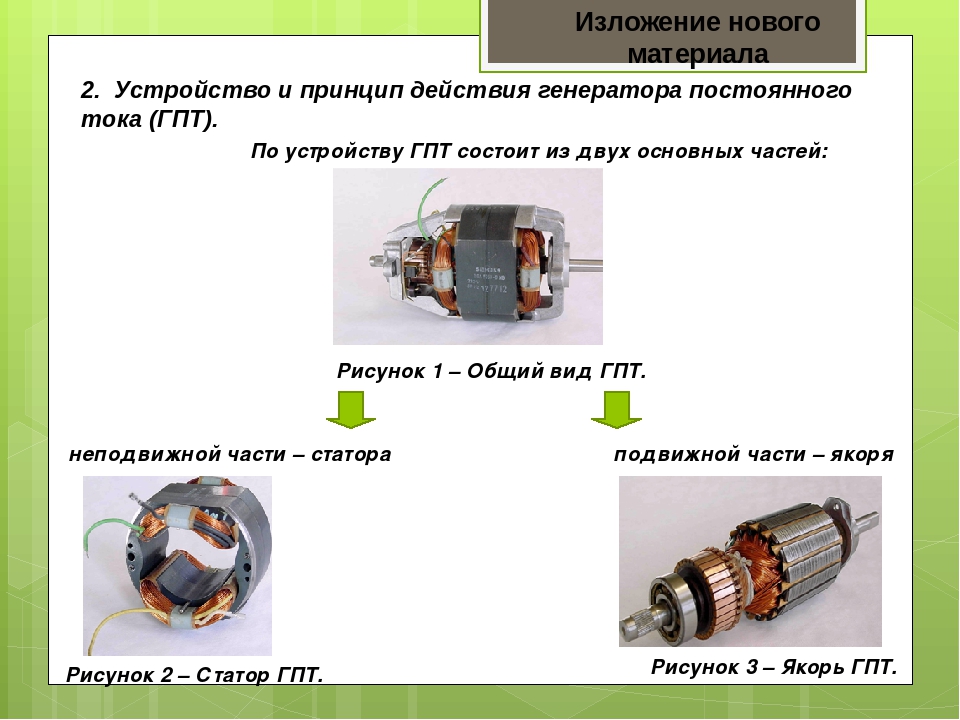 Это поле симметрично
Это поле симметрично
относительно осей этих полюсов и соосно
с ними. При подключении к двигателю
нагрузки за счет тока в обмотке якоря
создается магнитное поле – поле
якоря. Ось этого поля будет перпендикулярна
оси главных полюсов. Так как при вращении
якоря распределение тока в проводниках
якоря остается неизменным, то поле якоря
остается неподвижным в пространстве.
Сложение этого поля с полем главных
полюсов дает результирующее поле,
которое разворачивается на угол
против направления вращения якоря.
В итоге уменьшается вращающий момент,
так как часть проводников попадает в
зону полюса противоположной полярности
и создает тормозной момент. При этом
происходит искрение щеток и обгорание
коллектора, возникает продольное
размагничивающее поле.
С целью уменьшения влияния реакции
якоря на работу машины в него встраивают
дополнительные полюса. Обмотки таких
полюсов включаются последовательно с
основной обмоткой якоря, но изменение
направление намотки в них вызывает
появление магнитного поля, направленного
против магнитного поля якоря.
Для изменения направления вращения
электродвигателя постоянного тока
необходимо изменить полярность
напряжения, подводимого к якорю или
обмотке возбуждения.
В зависимости от способа включения
обмотки возбуждения различают
электродвигатели постоянного тока с
параллельным, последовательным и
смешанным возбуждением.
У двигателей с параллельным возбуждением
обмотка рассчитана на полное напряжение
питающей сети и включается параллельно
цепи якоря (рис. 3).
Двигатель с последовательным возбуждением
имеет обмотку возбуждения, которая
включается последовательно с якорем,
поэтому эта обмотка рассчитана на полный
ток якоря (рис. 4).
Двигатели со смешанным возбуждением
имеют две обмотки, одна включается
параллельно, другая — последовательно
с якорем (рис. 5).
Рис. 3
Рис. 4
При пуске электродвигателей постоянного
тока (независимо от способа возбуждения)
путем прямого включения в питающую сеть
возникают значительные пусковые токи,
которые могут привести к выходу их из
строя.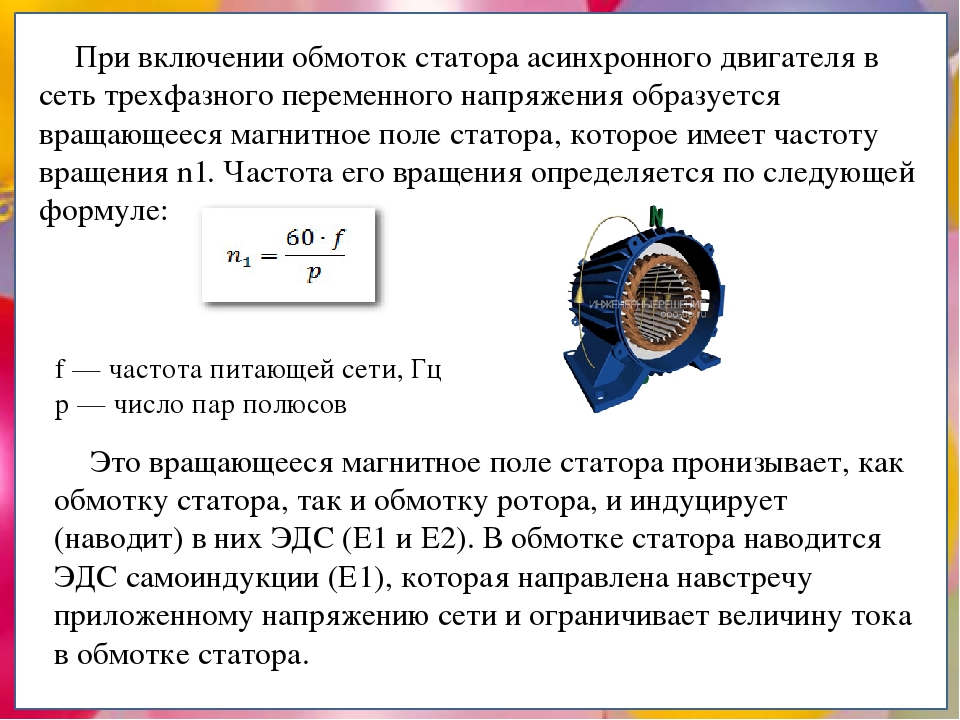 Это происходит в результате
Это происходит в результате
выделения значительного количества
теплоты в обмотке якоря и последующего
нарушения ее изоляции. Поэтому пуск
двигателей постоянного тока производится
специальными пусковыми приспособлениями.
В большинстве случаев для этих целей
применяется простейшее пусковое
приспособление — пусковой реостат.
Процесс пуска электродвигателя
постоянного тока с пусковым реостатом
показан на примере двигателя постоянного
тока с параллельным возбуждением.
Исходя из уравнения, составленного в
соответствии со вторым законом Кирхгофа
для левой части электрической цепи (см.
рис. 3), пусковой реостат полностью
выведен (R
пуск
= 0), ток якоря
,
где U
— напряжение, подводимое к
электродвигателю;R
я —
сопротивление обмотки якоря.
В начальный момент пуска электродвигателя
частота вращения якоря n
= 0, поэтому
противоэлектродвижущая сила, наводимая
в обмотке якоря, в соответствии с
полученным ранее выражением также будет
равна нулю (Е
= 0).
Сопротивление обмотки якоря R
я — величина довольно малая. Для того
чтобы ограничить возможный при этом
недопустимо большой ток в цепи якоря
при пуске, последовательно с якорем
независимо от способа возбуждения
двигателя включается пусковой реостат
(пусковое сопротивлениеR
пуск).
В этом случае пусковой ток якоря
.
Сопротивление пускового реостата R
пуск рассчитывают для работы только на время
пуска и подбирают таким образом, чтобы
пусковой ток якоря электродвигателя
не превышал допустимого значения
(I
я,пуск 2I
я,ном).
По мере разгона электродвигателя ЭДС,
наводимая в обмотке якоря, вследствие
возрастания частоты его вращения n
возрастает (Е
=с
e nФ
).
В результате этого ток якоря при прочих
равных условиях уменьшается. При этом
сопротивление пускового реостатаR
пуск
по мере разгона якоря электродвигателя
необходимо постепенно уменьшать. После
окончания разгона двигателя до
номинального значения частоты вращения
якоря ЭДС возрастает настолько, что
пусковое сопротивление может быть
сведено к нулю, без опасности значительного
возрастания тока якоря.
Таким образом, пусковое сопротивление
R
пуск в цепи якоря необходимо
только при пуске. В процессе нормальной
работы электродвигателя оно должно
быть отключено, во-первых, потому, что
рассчитано на кратковременную работу
во время пуска, во-вторых, при наличии
пускового сопротивления в нем будут
возникать тепловые потери мощности,
равныеR
пуск I
2 я,
существенно снижающие КПД электродвигателя.
Для электродвигателя постоянного
тока с параллельным возбуждением в
соответствии со вторым законом Кирхгофа
для якорной цепи уравнение электрического
равновесия имеет вид
.
С учетом выражения для ЭДС (Е
=с
e nФ
),
записав полученную формулу относительно
частоты вращения, получаем уравнение
частотной (скоростной) характеристики
электродвигателяn
(I
я):
.
Из него следует, что при отсутствии
нагрузки на валу и токе якоря I
я =
0 частота вращения электродвигателя
при данном значении питающего напряжения
.
Частота вращения электродвигателя n
0
является частотой вращения идеального
холостого хода. Кроме параметров
электродвигателя она зависит также от
значения подводимого напряжения и
магнитного потока. С уменьшением
магнитного потока при прочих равных
условиях частота вращения идеального
холостого хода возрастает. Поэтому в
случае обрыва цепи обмотки возбуждения,
когда ток возбуждения становится равным
нулю (I
в = 0), магнитный
поток двигателя снижается до значения,
равного значению остаточного магнитного
потокаФ
ост. При этом двигатель
“идет в разнос”, развивая частоту
вращения, на много большую номинальной,
что представляет определенную опасность
как для двигателя, так и для обслуживающего
персонала.
Частотная (скоростная) характеристика
электродвигателя постоянного тока с
параллельным возбуждением n
(I
я)
при постоянном значении магнитного
потокаФ
=const
и постоянном
значении подводимого напряженияU =
const
имеет вид прямой
(рис. 6).
6).
Из рассмотрения этой характеристики
видно, что с увеличением нагрузки на
валу, т. е. с увеличением тока якоряI
я
частота вращения электродвигателя
уменьшается на значение, пропорциональное
падению напряжения на сопротивлении
цепи якоряR
я.
Выражая в уравнениях частотных
характеристик ток якоря через
электромагнитный момент двигателя М
=
с
м I
я Ф
, получим
уравнение механической характеристики,
т. е. зависимостиn
(М
) приU =
const
для двигателей с параллельным
возбуждением:
.
Пренебрегая влиянием реакции якоря
в процессе изменения нагрузки, можно
принять электромагнитный момент
двигателя пропорциональным току якоря.
Поэтому механические характеристики
двигателей постоянного тока имеют такой
же вид, как и соответствующие частотные
характеристики. Электродвигатель с
параллельным возбуждением имеет жесткую
механическую характеристику (рис. 7). Из
этой характеристики видно, что его
частота вращения с ростом момента
нагрузки снижается незначительно, так
как ток возбуждения при параллельном
включении обмотки возбуждения и
соответственно магнитный поток двигателя
остаются практически неизменными, а
сопротивление цепи якоря относительно
мало.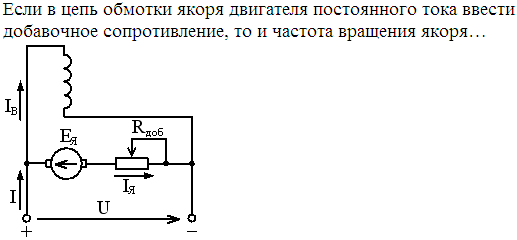
Рабочие характеристики двигателей
постоянного тока представляют собой
зависимости частоты вращенияn
,
моментаМ
, тока якоряI
я
и КПД () от полезной
мощности на валуР
2
электродвигателя, т. е.n
(Р
2),М
(Р
2),I
я (Р
2),(Р
2) при
неизменном напряжении на его зажимахU
=const
.
Рабочие характеристики электродвигателя
постоянного тока с параллельным
возбуждением представлены на рис. 8. Из
этих характеристик видно, что частота
вращения n
электродвигателей с
параллельным возбуждением с увеличением
нагрузки несколько уменьшается.
Зависимость полезного момента на валу
двигателя от мощностиР
2
представляет собой почти прямую
линию, так как момент этого двигателя
пропорционален нагрузке на валу:М
=kР
2 /
n
.
Искривление указанной зависимости
объясняется некоторым снижением частоты
вращения с увеличением нагрузки.
При Р
2
= 0 ток, потребляемый электродвигателем,
равен току холостого хода. При увеличении
При увеличении
мощности ток якоря увеличивается
приблизительно по той же зависимости,
что и момент нагрузки на валу, так как
при условииФ
=const
ток якоря
пропорционален моменту нагрузки. КПД
электродвигателя определяют как
отношение полезной мощности на валу к
мощности, потребляемой из сети:
,
где Р
2 —
полезная мощность
на валу;Р
1 =UI
—
мощность,
потребляемая электродвигателем из
питающей сети;Р
эя =I
2 я R
я — электрические
потери мощности в цепи якоря,Р
эв =UI
в, =I
2 в R
в —
электрические потери мощности
в цепи возбуждения;Р
мех —
механические потери мощности;Р
м — потери мощности на гистерезис и
вихревые токи.
Важным является также возможность
регулирования частоты вращения
электродвигателей постоянного тока.
Анализ выражений для частотных
характеристик показывает, что частоту
вращения электродвигателей постоянного
тока можно регулировать несколькими
способами: включением добавочного
сопротивленияR
доб в цепь
якоря, изменением магнитного потокаФ
и изменением напряженияU,
подводимого
к двигателю.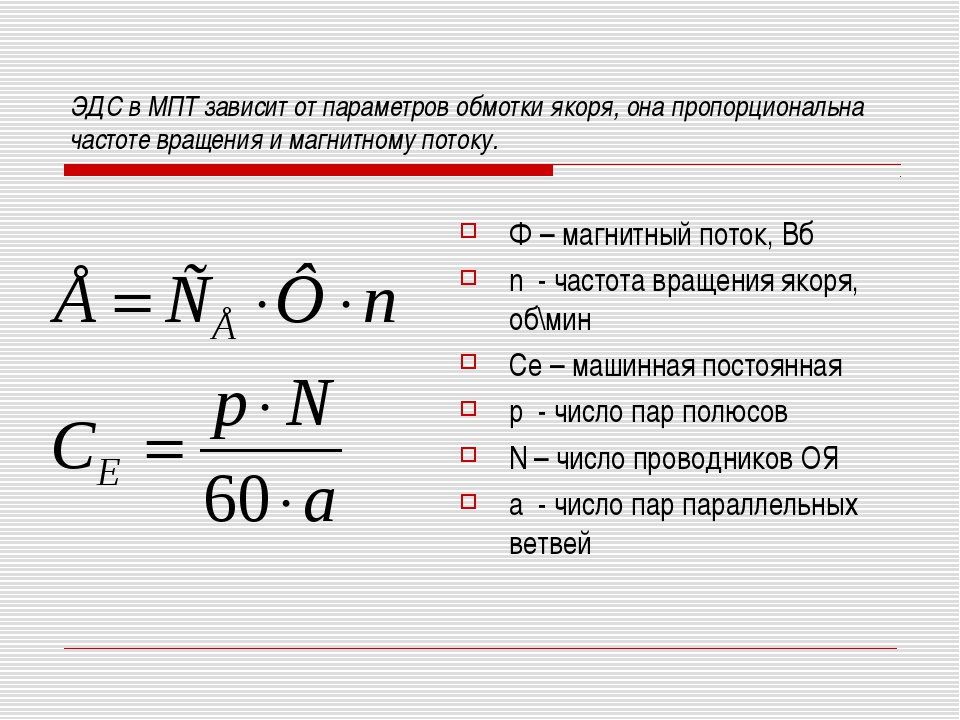
Одним из наиболее распространенных
является способ регулирования частоты
вращения включением в цепь якоря
электродвигателя добавочного
сопротивления. С увеличением сопротивления
в цепи якоря при прочих равных условиях
происходит снижение частоты вращения.
При этом чем больше сопротивление в
цепи якоря, тем меньше частота вращения
электродвигателя.
При неизменном напряжении питающей
сети и неизменном магнитном потоке в
процессе изменения значения сопротивления
якорной цепи можно получить семейство
механических характеристик, например,
для электродвигателя с параллельным
возбуждением (рис. 9).
Преимущество рассмотренного способа
регулирования заключается в его
относительной простоте и возможности
получить плавное изменение частоты
вращения в широких пределах (от нуля до
номинального значения частоты n
ном).
К недостаткам этого способа следует
отнести то, что имеют место значительные
потери мощности в добавочном сопротивлении,
увеличивающиеся с уменьшением частоты
вращения, а также необходимость
использования дополнительной регулирующей
аппаратуры.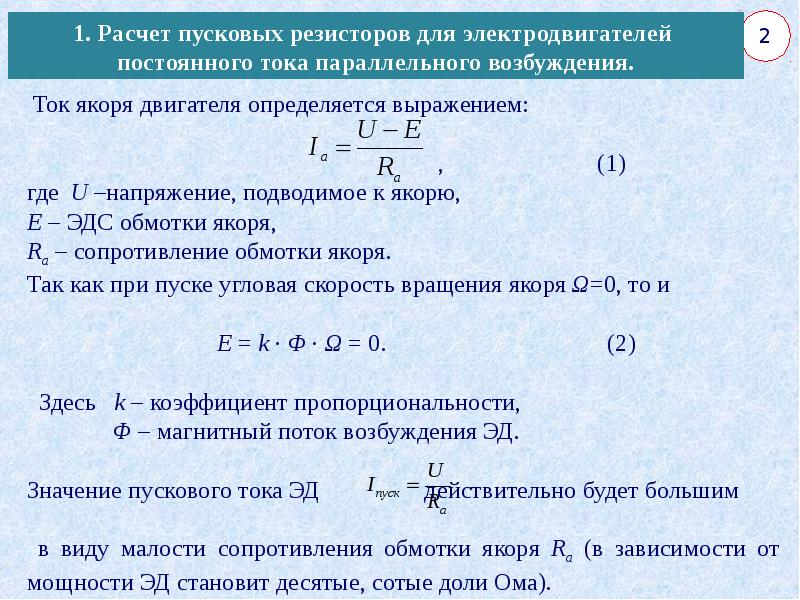 Кроме того, этот способ не
Кроме того, этот способ не
позволяет регулировать частоту вращения
электродвигателя вверх от ее номинального
значения.
Изменения частоты вращения электродвигателя
постоянного тока можно достигнуть и в
результате изменения значения магнитного
потока возбуждения. При изменении
магнитного потока в соответствии с
уравнением частотной характеристики
для двигателей постоянного тока с
параллельным возбуждением при постоянном
значении напряжения питающей сети и
неизменном значении сопротивления
якорной цепи можно получить семейство
механических характеристик, представленных
на рис. 10.
Как видно из этих характеристик, с
уменьшением магнитного потока частота
вращения идеального холостого хода
электродвигателяn
0
возрастает. Так как при частоте
вращения, равной нулю, ток якоря
электродвигателя, т. е. пусковой ток, не
зависит от магнитного потока, то
частотные характеристики семейства не
будут параллельны друг другу, причем
жесткость характеристик уменьшается
с уменьшением магнитного потока
(увеличение магнитного потока двигателя
обычно не производится, так как при этом
ток обмотки возбуждения превышает
допустимое, т.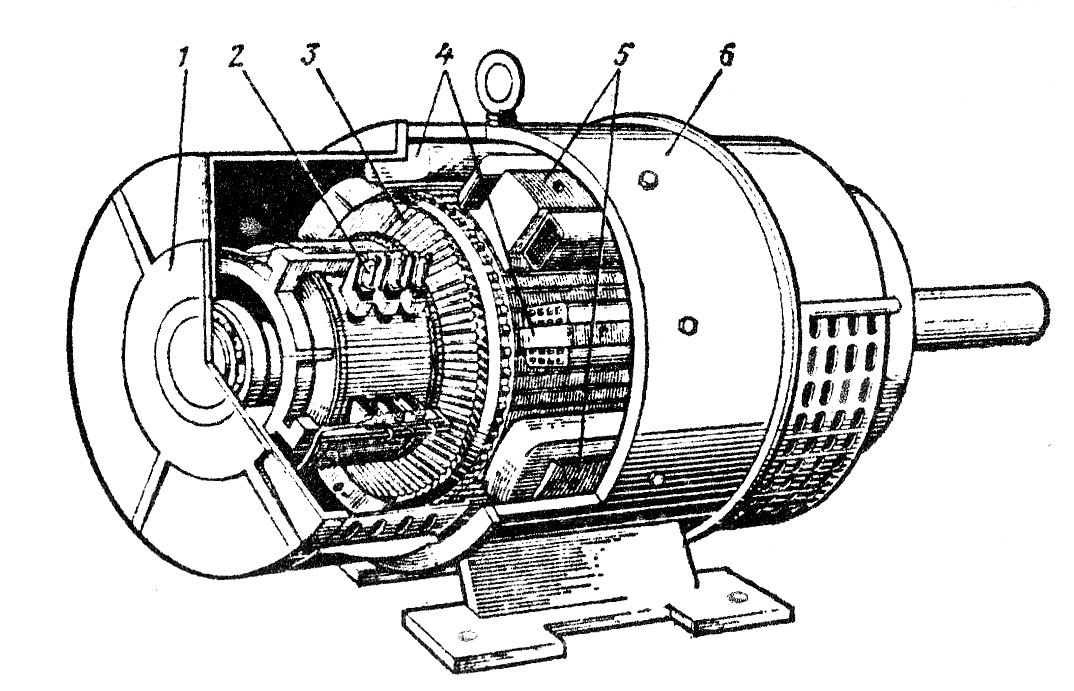 е. номинальное, его
е. номинальное, его
значение). Таким образом, изменение
магнитного потока позволяет регулировать
частоту вращения электродвигателя
только вверх от номинального ее значения,
что является недостатком данного
способа регулирования.
К недостаткам этого способа следует
отнести также относительно небольшой
диапазон регулирования вследствие
наличия ограничений по механической
прочности и коммутации электродвигателя.
Преимуществом данного способа
регулирования является его простота.
Для двигателей с параллельным возбуждением
это достигается изменением сопротивления
регулировочного реостата R
р
в цепи возбуждения.
У двигателей постоянного тока с
последовательным возбуждением изменение
магнитного потока достигается
шунтированием обмотки возбуждения
сопротивлением, имеющим соответствующее
значение, либо замыканием накоротко
определенного количества витков обмотки
возбуждения.
Широкое применение, особенно в
электроприводах, построенных по системе
генератор — двигатель, получил способ
регулирования частоты вращения путем
изменения напряжения на зажимах якоря
двигателя. При постоянных магнитном
При постоянных магнитном
потоке и сопротивлении якорной цепи в
результате изменения напряжения на
якоре можно получить семейство частотных
характеристик.
В качестве примера на рис. 11
представлено такое семейство механических
характеристик для электродвигателя с
параллельным возбуждением.
С изменением подводимого напряжения
частота вращения идеального холостого
хода n 0
в соответствии с приведенным ранее
выражением изменяется пропорционально
напряжению. Так как сопротивление цепи
якоря остается неизменным, то жесткость
семейства механических характеристик
не отличается от жесткости естественной
механической характеристики приU
=U
ном.
Преимуществом рассмотренного способа
регулирования является широкий диапазон
изменения частоты вращения без увеличения
потерь мощности. К недостаткам данного
способа следует отнести то, что при этом
необходим источник регулируемого
питающего напряжения, а это приводит к
увеличению массы, габаритов и стоимости
установки.
тока»
Место урока в рабочей программе: 55 урок, один из уроков темы «Электромагнитные явления».
Цель урока:
Объяснить устройство и принцип действия электрического двигателя.
Задачи:
изучить электрический двигатель, с использованием практического метода – выполнения лабораторной работы.
научиться применять полученные знания в нестандартных ситуациях для решения задач;
для развития мышления учащихся продолжить отработку умственных операций анализа, сравнения и синтеза.
продолжить формирование познавательного интереса учащихся.
Методическая цель:
применение здоровьесберегающих технологий на уроках физики.
Формы работы и виды деятельности на уроке: проверка знаний с учётом индивидуальных особенностей учащихся; лабораторная работа проводится в микрогруппах(парами), актуализация знаний учащихся в игровой форме; объяснение нового материала в форме беседы с демонстрационным экспериментом, целеполагание и рефлексия.
Ход урока
1)Проверка домашнего задания.
Самостоятельная работа (разноуровневая) проводится в течение первых 7 минут урока.
1 уровень
.
2 уровень.
3 уровень.
2). Изучение нового материала. (15 минут).
Учитель сообщает тему урока, учащиеся формируют цель.
Актуализация знаний. Игра «да» и «нет»
Учитель читает фразу, если ученики согласны с утверждением они встают, если нет – сидят.
- Магнитное поле образуется постоянными магнитами или электрическим током.
- Магнитных зарядов в природе нет.
- Южный полюс магнитной стрелки указывает южный географический полюс Земли.
- Электромагнитом называется катушка с железным сердечником внутри.
- Силовые линии магнитного поля направлены слева направо.
- Линии, вдоль которых в магнитном поле устанавливаются магнитные стрелки называются магнитными линиями.
План изложения.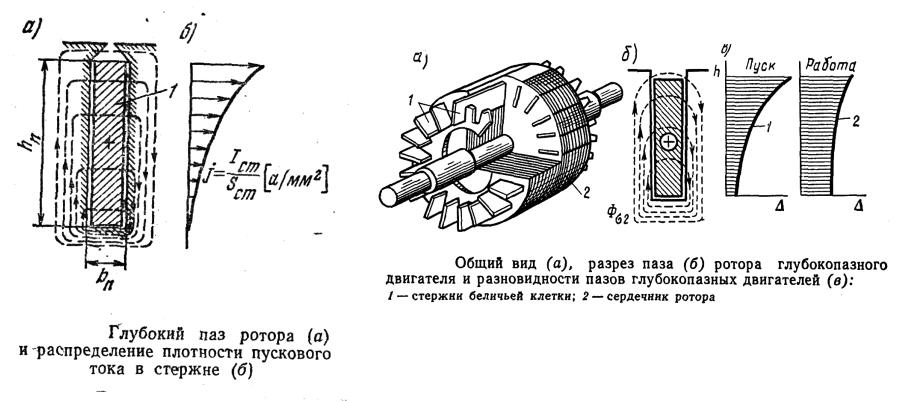
- Действие магнитного поля на проводник с током.
- Зависимость направления движения проводника от направления тока в нём и от расположения полюсов магнита.
- Устройство и действие простейшего коллекторного электродвигателя.
Демонстрации.
- Движение проводника и рамки с током в магнитном поле.
- Устройство и принцип действия электродвигателя постоянного тока.
3.Лабораторная работа № 9. (работа в микрогруппах- парами).
Инструктаж по технике безопасности.
Работа выполняется по описанию в учебнике стр.176.
4.Заключительный этап урока.
Задача.
Два электронных пучка отталкиваются, а два параллельных провода, по которым течёт ток в одном направлении притягиваются. Почему? Можно ли создать условия, при которых эти проводники тоже будут отталкиваться?
Рефлексия.
Что нового узнали? Нужны ли эти знания в повседневной жизни?
Вопросы:
От чего зависит скорость вращения ротора в электродвигателе?
Что называется электрическим двигателем?
П.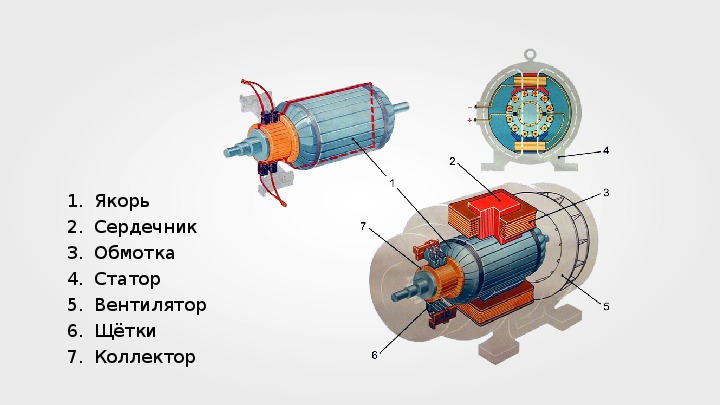
61, составить кроссворд по теме «электромагнитные явления.
Приложение.
1 уровень
.
1.Как взаимодействуют разноимённые и одноимённые полюсы магнитов?
2. Можно ли разрезать магнит так, чтобы один из полученных магнитов имел только северный полюс, а другой – только южный?
2 уровень.
Почему корпус компаса делают из меди, алюминия, пластмассы и других материалов, но не из железа?
Почему стальные рельсы и полосы, лежащие на складе, через некоторое время оказываются намагниченными?
3 уровень.
1.Нарисуйте магнитное поле подковообразного магнита и укажите направление силовых линий.
2. К южному полюсу магнита притянулись две булавки. Почему их свободные концы отталкиваются?
1 уровень
.
1.Как взаимодействуют разноимённые и одноимённые полюсы магнитов?
2. Можно ли разрезать магнит так, чтобы один из полученных магнитов имел только северный полюс, а другой – только южный?
2 уровень.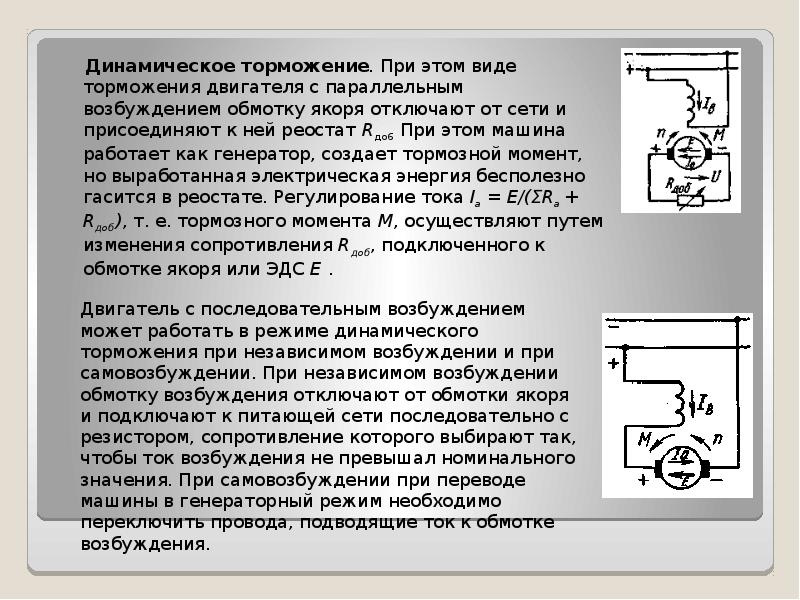
Почему корпус компаса делают из меди, алюминия, пластмассы и других материалов, но не из железа?
Почему стальные рельсы и полосы, лежащие на складе, через некоторое время оказываются намагниченными?
3 уровень.
1.Нарисуйте магнитное поле подковообразного магнита и укажите направление силовых линий.
2. К южному полюсу магнита притянулись две булавки. Почему их свободные концы отталкиваются?
МКОУ «Аллакская СОШ»
Открытый урок физики в 8 классе по теме «
Действие магнитного поля на проводник с током. Электрический двигатель. Лабораторная работа № 9 «Изучение электрического двигателя постоянного
тока».
Подготовила и провела: учитель первой категории Таранушенко Елизавета Александровна.
Цепь якоря — обзор
22.8 Реактивные сопротивления
Всякий раз, когда на клеммах генератора возникает трехфазное короткое замыкание, ток в цепи якоря резко возрастает до большого значения, а поскольку сопротивление цепи мало по сравнению с его реактивное сопротивление, ток сильно отстает, а pf примерно равна нулю.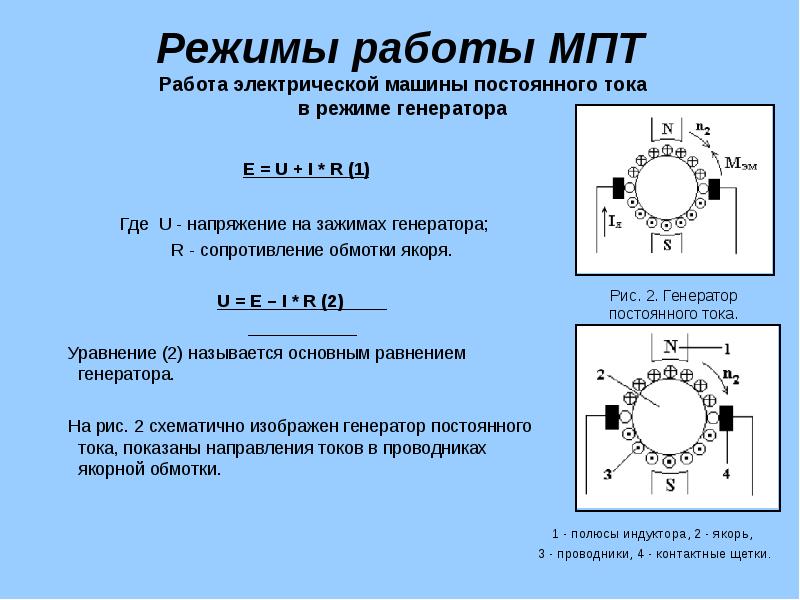 Из-за этого внезапного переключения есть две составляющие тока:
Из-за этого внезапного переключения есть две составляющие тока:
(1) составляющая переменного тока, (2) составляющая постоянного тока (затухающая).
Осциллограмма изменения тока в зависимости от времени представлена на рис. 22.9 для трехфазного замыкания на клеммах генератора переменного тока.
Рисунок 22.9. Анализ симметричного тока короткого замыкания. Oa — сверхпереходной ток; Об — переходный ток; Oc, установившийся ток.
Ротор вращается с нулевой скоростью по отношению к полю из-за переменной составляющей тока в статоре, тогда как он вращается с синхронной скоростью по отношению к полю из-за постоянной составляющей тока в проводниках статора.Обмотка ротора действует как вторичная обмотка трансформатора, первичная обмотка которого является обмоткой статора. Аналогично в случае ротора, на полюсах которого закреплена демпферная обмотка, вся система будет работать как трехобмоточный трансформатор, в котором статор является первичной, а обмотка возбуждения ротора и демпферные обмотки образуют вторичную часть трансформатора.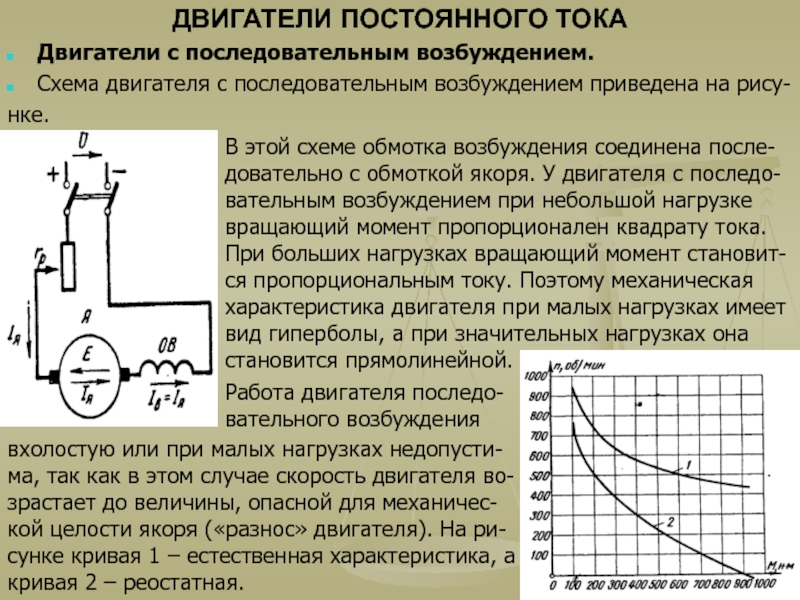 Следует отметить, что действие трансформатора проявляется только в отношении постоянной составляющей тока. Сильно запаздывающая переменная составляющая тока пытается размагнититься, т.е.е., уменьшить поток в воздушном зазоре.
Следует отметить, что действие трансформатора проявляется только в отношении постоянной составляющей тока. Сильно запаздывающая переменная составляющая тока пытается размагнититься, т.е.е., уменьшить поток в воздушном зазоре.
Это уменьшение потока от момента короткого замыкания до установившегося режима работы не может произойти мгновенно из-за большого количества энергии, запасенной индуктивностью соответствующей системы. Таким образом, это изменение потока происходит медленно и зависит от постоянной времени системы.
Чтобы уравновесить внезапно возросшую размагничивающую МДС тока якоря, ток возбуждения, т. е. ток обмотки возбуждения, должен увеличиваться в том же направлении, что и до неисправности.
Это происходит из-за действия трансформатора. При этом ток в демпфере и вихревые токи в прилегающих металлических деталях возрастают по закону Ленца, что помогает обмотке возбуждения ротора поддерживать поток в воздушном зазоре. В момент короткого замыкания существует взаимная связь между обмоткой статора, обмоткой ротора и демпферной обмоткой, и эквивалентная схема представлена на рис. 22.10A–C.
22.10A–C.
Рисунок 22.10. Синхронная эквивалентная схема — ось d: сверхпереходное состояние (A), переходное состояние (B) и установившееся состояние (C), а ось q: сверхпереходное состояние (D), переходное состояние (E).
Поскольку эквивалентное сопротивление демпферной обмотки относительно статора больше по сравнению с обмоткой ротора, постоянная времени демпферной обмотки t″ меньше, чем у обмотки возбуждения ротора. Поэтому эффект демпфирующей обмотки и вихревых токов на полюсных поверхностях исчезает после первых нескольких циклов. Соответственно эквивалентная схема после первых нескольких циклов сводится к схеме, показанной на рис. 22.10B. Еще через несколько циклов в зависимости от постоянной времени обмотки возбуждения t’ влияние постоянного тока.составляющая затухнет и установится установившееся состояние, для которого эквивалентная схема показана на рис. 22.10C. Индуктивность увеличивается от начального состояния до конечного устойчивого состояния.
т. е. синхронное реактивное сопротивление > переходное реактивное сопротивление > сверхпереходное реактивное сопротивление.
В сверхпереходном состоянии
(22,61)Xd||=XL+11Xad+1Xf+1Xkd
В переходном состоянии
(22,62)Xd|=XL+11Xad+1Xf
В установившемся состоянии Xd=XL +Xad
Аналогичным образом, если X g представляет фиктивную катушку g для представления эффекта потокосцепления вдоль оси q, то
(22.63)Xq||=XL+11Xaq+1Xg+1Xkq
Это сверхпереходное реактивное сопротивление Xq|| очень мал. Через очень короткое время схема меняется на (рис. 22.10E), показывая, что Xq=Xq|
(22,64)Xq|=XL+11Xaq=Xq=XL+Xaq
В установившемся режиме
(22,65)Xq=XL+Xaq
В следующей таблице показаны типичные значения констант для различных типов синхронных машин .
| Turbogenerator | Synchorsous | Генератор Waterwheel | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| с демпферами | с амортизаторами | ||||||||||||
| Synchronous | 2. 0 0 | 1,45 1,25 | 0,9 0,9 | ||||||||||
| х сд | 1,4-2,5 1,35-1,65 | 0.75-1.8 0.5-1.5 | 0,11–0,25 | 0,24–0,31 | 0,12–0,27 | 0,14–0,32 | 0.14–0,32 | ||||||
| Субпереходный | 0,13 | 0,19 | 0,13 | 0,16 | 6|9 | 6| | 0.08-0.18 | 0.15-0.23 | 0.09-0.15 | 0.1-0.27 | 0.16-0.3 | ||
| обратной последовательности | 0,16 | 0,28 | 0,12 | 0,16 | 0,23 | ||||||||
| х 2 | 0,09–0,23 | 0.24-0.31 | 0.1-0.27 | 0.12-0.37 | |||||||||
| нулевой последовательности | 0,08 0,28 | 0,03 | 0,08 | 0,08 | |||||||||
| х 0 | 0.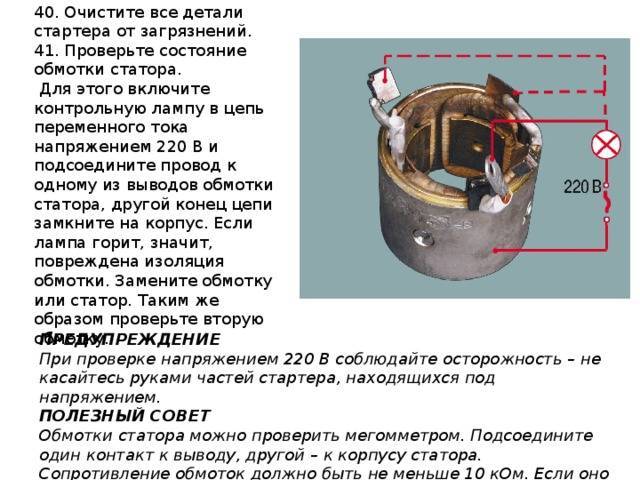 02- 0,15 02- 0,15 | 0.22-0.31 | 0.06-0.1 | 0.06-0.1 | |||||||||
| 4,7 | 4,8 | 1,2 | 3,4 | 3,4 | |||||||||
| 2.6-6 | 4.3-5.7 | 0,7-1,8 | 2-5 | 2-5 | |||||||||
| Время открытого цепи | 9.5 | 5.5 | 9002 | ||||||||||
| T DS | 3,5–16 | ||||||||||||
Примечание: В каждом блоке указаны средние значения.
Электродвигатель | Encyclopedia.com
Двигатель постоянного тока
Типы двигателей постоянного тока
Электродвигатели переменного тока
Принципы работы трехфазного двигателя
Ресурсы
Электродвигатель — это машина, используемая для преобразования электрической энергии в механическую.Электродвигатели важны для современной жизни, они используются в пылесосах, посудомоечных машинах, компьютерных принтерах, факсимильных аппаратах, водяных насосах, производстве, автомобилях (как обычных, так и гибридных), станках, печатных станках, системах метро и многом другом.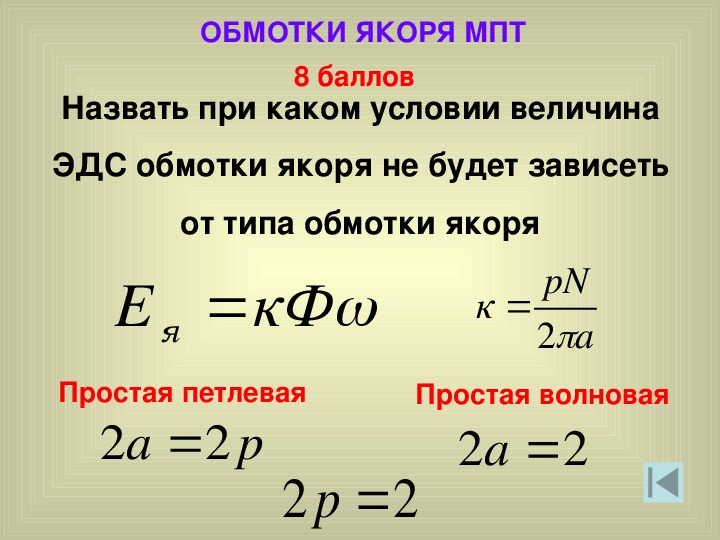
Основные физические принципы работы электродвигателя известны как закон Ампера и закон Фарадея. Первый утверждает, что электрический проводник, находящийся в магнитном поле, будет испытывать силу, если любой ток, протекающий через проводник, имеет составляющую, перпендикулярную этому полю.Изменение направления тока или магнитного поля создаст силу, действующую в противоположном направлении. Второй принцип гласит, что если проводник движется через магнитное поле, то любая составляющая движения, перпендикулярная этому полю, создаст разность потенциалов между концами проводника.
Электродвигатель состоит из двух основных элементов. Первый, статический компонент, состоящий из магнитных материалов и электрических проводников для создания магнитных полей желаемой формы, известен как статор .Второй, который также состоит из магнитных и электрических проводников для создания определенных магнитных полей, которые взаимодействуют с полями, создаваемыми статором, известен как ротор . Ротор содержит подвижный компонент двигателя, имеющий вращающийся вал для соединения с приводимой машиной и некоторые средства поддержания электрического контакта между ротором и корпусом двигателя (как правило, угольные щетки, упирающиеся в токосъемные кольца). При работе электрический ток, подаваемый на двигатель, используется для создания магнитных полей как в роторе, так и в статоре.Эти поля толкают друг друга, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Ротор содержит подвижный компонент двигателя, имеющий вращающийся вал для соединения с приводимой машиной и некоторые средства поддержания электрического контакта между ротором и корпусом двигателя (как правило, угольные щетки, упирающиеся в токосъемные кольца). При работе электрический ток, подаваемый на двигатель, используется для создания магнитных полей как в роторе, так и в статоре.Эти поля толкают друг друга, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Электрические двигатели делятся на две большие категории, в зависимости от типа используемой электроэнергии: двигатели постоянного тока (DC) и двигатели переменного тока (AC).
Первый электрический двигатель постоянного тока был продемонстрирован Майклом Фарадеем в Англии в 1821 году. Поскольку единственными доступными источниками электроэнергии был постоянный ток, первые коммерчески доступные двигатели были типа постоянного тока, которые стали популярными в 1880-х годах.Эти двигатели использовались как для маломощных, так и для высокомощных приложений, таких как электрические уличные железные дороги.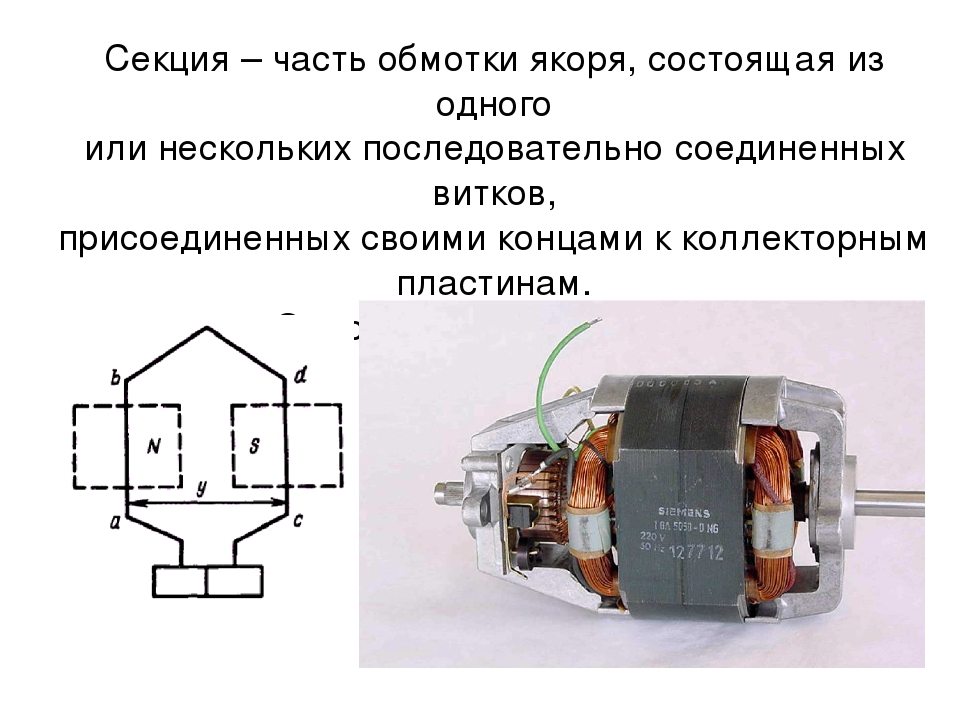 Только в 1890-х годах, когда появилась электроэнергия переменного тока, двигатель переменного тока был разработан, в первую очередь корпорациями Westinghouse и General Electric. В течение этого десятилетия было решено большинство проблем, связанных с однофазными и многофазными двигателями переменного тока. Следовательно, все основные характеристики электродвигателей были разработаны к 1900 году.
Только в 1890-х годах, когда появилась электроэнергия переменного тока, двигатель переменного тока был разработан, в первую очередь корпорациями Westinghouse и General Electric. В течение этого десятилетия было решено большинство проблем, связанных с однофазными и многофазными двигателями переменного тока. Следовательно, все основные характеристики электродвигателей были разработаны к 1900 году.
Работа двигателя постоянного тока зависит от взаимодействия полюсов статора с частью ротора или якоря.Статор содержит четное число полюсов с переменной магнитной полярностью, каждый полюс состоит из электромагнита, образованного полюсной обмоткой, намотанной на полюсный сердечник. При протекании постоянного тока через обмотку образуется магнитное поле. Якорь также содержит обмотку, в которой ток течет в указанном направлении. Этот ток якоря взаимодействует с магнитным полем в соответствии с законом Ампера, создавая крутящий момент, который вращает якорь.
Если бы обмотки якоря вращались вокруг следующего полюсного наконечника противоположной полярности, крутящий момент действовал бы в противоположном направлении, тем самым останавливая якорь. Чтобы предотвратить это, ротор содержит коммутатор, который изменяет направление тока якоря для каждого полюсного наконечника, мимо которого вращается якорь, таким образом гарантируя, что все обмотки, проходящие, например, через полюс северной полярности, будут иметь ток. в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, создавая крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами. Коллектор обычно состоит из разъемного контактного кольца, по которому перемещаются щетки, подающие постоянный ток.
Чтобы предотвратить это, ротор содержит коммутатор, который изменяет направление тока якоря для каждого полюсного наконечника, мимо которого вращается якорь, таким образом гарантируя, что все обмотки, проходящие, например, через полюс северной полярности, будут иметь ток. в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, создавая крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами. Коллектор обычно состоит из разъемного контактного кольца, по которому перемещаются щетки, подающие постоянный ток.
Вращение обмоток якоря через поле статора создает напряжение на якоре, известное как противоЭДС (электродвижущая сила), поскольку оно противодействует приложенному напряжению: это следствие закона Фарадея. Величина встречной ЭДС зависит от напряженности магнитного поля и скорости вращения якоря. При первоначальном включении двигателя постоянного тока противоЭДС отсутствует и якорь начинает вращаться. Счетчик ЭДС увеличивается с вращением.Действующее напряжение на обмотках якоря равно приложенному напряжению за вычетом противоЭДС.
Счетчик ЭДС увеличивается с вращением.Действующее напряжение на обмотках якоря равно приложенному напряжению за вычетом противоЭДС.
Двигатели постоянного тока встречаются чаще, чем мы думаем. Автомобиль может иметь до 20 двигателей постоянного тока для привода вентиляторов, сидений и окон. Они бывают трех разных типов, классифицируемых в соответствии с используемой электрической схемой. В шунтовом двигателе обмотки якоря и обмотки возбуждения соединены параллельно, поэтому токи в каждой из них относительно независимы. Ток через обмотку возбуждения можно регулировать с помощью реостата возбуждения (переменного резистора), что позволяет широко варьировать скорость двигателя в широком диапазоне условий нагрузки.Этот тип двигателя используется для привода станков или вентиляторов, которые требуют широкого диапазона скоростей.
В последовательном двигателе обмотка возбуждения соединена последовательно с обмоткой якоря, что приводит к очень высокому пусковому моменту, поскольку и ток якоря, и напряженность поля достигают своего максимума. Однако, как только якорь начинает вращаться, противоЭДС уменьшает ток в цепи, тем самым уменьшая напряженность поля. Серийный двигатель используется там, где требуется большой пусковой момент, например, в автомобильных стартерах, кранах и подъемниках.
Однако, как только якорь начинает вращаться, противоЭДС уменьшает ток в цепи, тем самым уменьшая напряженность поля. Серийный двигатель используется там, где требуется большой пусковой момент, например, в автомобильных стартерах, кранах и подъемниках.
Комбинированный двигатель представляет собой комбинацию последовательного и параллельного двигателей с параллельными и последовательными обмотками возбуждения. Этот тип двигателя имеет высокий пусковой момент и возможность изменять скорость и используется в ситуациях, требующих обоих этих свойств, таких как штамповочные прессы, конвейеры и элеваторы.
Двигатели переменного тока гораздо более распространены, чем двигатели постоянного тока, потому что почти все системы электроснабжения работают на переменном токе. Существует три основных типа двигателей, а именно многофазные асинхронные, многофазные синхронные и однофазные двигатели.Поскольку трехфазные источники питания являются наиболее распространенными многофазными источниками, большинство многофазных двигателей работают от трехфазного тока.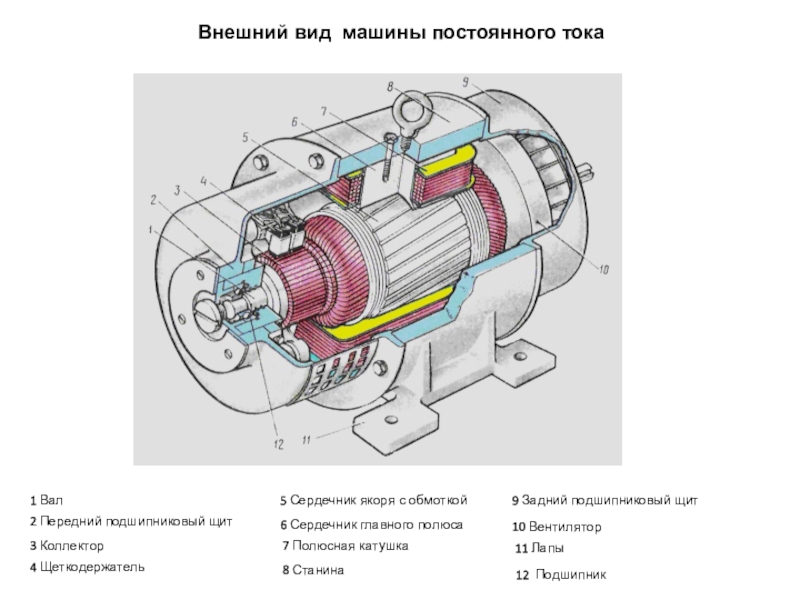 Трехфазные источники питания широко используются в коммерческих и промышленных условиях, тогда как однофазные источники почти всегда используются в домашних условиях.
Трехфазные источники питания широко используются в коммерческих и промышленных условиях, тогда как однофазные источники почти всегда используются в домашних условиях.
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в корпусе переменного тока. Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля. Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения.По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в течение цикла тока, тот полюс поля, магнитное поле которого наибольшее, постоянно меняется между тремя полюсами, в результате чего магнитное поле, наблюдаемое ротором, вращается. Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и числа полюсов, создаваемых обмоткой статора. Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3600 об/мин.
В трехфазном асинхронном двигателе обмотки ротора подключены не к источнику питания, а к источнику питания.
Постоянный ток — Постоянный ток, когда ток в цепи примерно постоянен во времени.
Ротор — Та часть электродвигателя, которая может свободно вращаться, включая вал, якорь и соединение с машиной.
Статор — Та часть электродвигателя, которая не может свободно вращаться, включая катушки возбуждения.
Крутящий момент — Способность или сила, необходимая для поворота или вращения вала или другого объекта.
по сути являются короткими замыканиями. Наиболее распространенный тип обмотки ротора, обмотка с беличьей клеткой, очень похож на беговое колесо, используемое в клетках для домашних песчанок. Когда двигатель первоначально включен и ротор неподвижен, проводники ротора подвергаются воздействию изменяющегося магнитного поля, проходящего с синхронной скоростью.Согласно закону Фарадея, эта ситуация приводит к индукции токов вокруг обмоток ротора; величина этого тока зависит от импеданса обмоток ротора.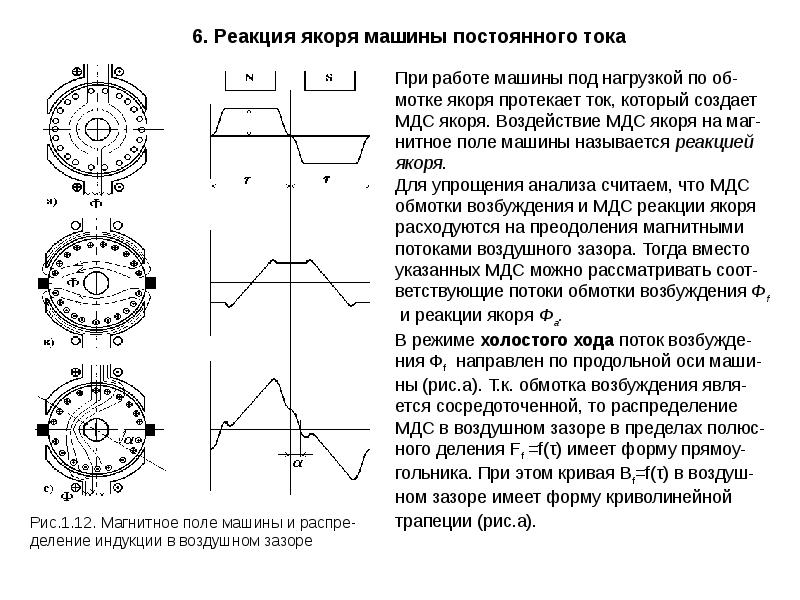 Поскольку теперь выполнены условия для двигательного действия, то есть проводники с током находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться. Ротор никогда не может вращаться с синхронной скоростью, потому что не было бы относительного движения между магнитным полем и обмотками ротора и не мог бы индуцироваться ток.Асинхронный двигатель имеет высокий пусковой момент.
Поскольку теперь выполнены условия для двигательного действия, то есть проводники с током находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться. Ротор никогда не может вращаться с синхронной скоростью, потому что не было бы относительного движения между магнитным полем и обмотками ротора и не мог бы индуцироваться ток.Асинхронный двигатель имеет высокий пусковой момент.
В двигателях с короткозамкнутым ротором скорость двигателя определяется нагрузкой, которую он приводит в действие, и количеством полюсов, создающих магнитное поле в статоре. Если некоторые полюса включены или выключены, скорость двигателя можно регулировать постепенно. В двигателях с фазным ротором полное сопротивление обмоток ротора можно изменять извне, что изменяет ток в обмотках и, таким образом, обеспечивает непрерывное регулирование скорости.
Трехфазные синхронные двигатели сильно отличаются от асинхронных двигателей.В синхронном двигателе ротор использует катушку с постоянным током для создания постоянного магнитного поля.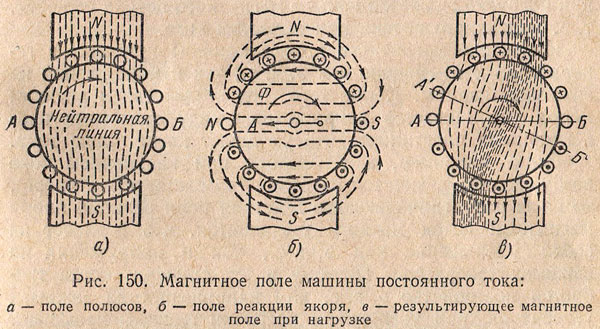 После приближения ротора к синхронной скорости двигателя северный (южный) полюс магнита ротора замыкается на южный (северный) полюс вращающегося поля статора, и ротор вращается с синхронной скоростью. Ротор синхронного двигателя обычно включает в себя обмотку с короткозамкнутым ротором, которая используется для запуска вращения двигателя до подачи питания на катушку постоянного тока. Беличья клетка не действует на синхронных скоростях по причине, описанной выше.
После приближения ротора к синхронной скорости двигателя северный (южный) полюс магнита ротора замыкается на южный (северный) полюс вращающегося поля статора, и ротор вращается с синхронной скоростью. Ротор синхронного двигателя обычно включает в себя обмотку с короткозамкнутым ротором, которая используется для запуска вращения двигателя до подачи питания на катушку постоянного тока. Беличья клетка не действует на синхронных скоростях по причине, описанной выше.
Однофазные асинхронные двигатели и синхронные двигатели, используемые в большинстве бытовых ситуаций, работают по принципу, аналогичному описанному для трехфазных двигателей. Однако для создания пусковых крутящих моментов необходимо внести различные модификации, поскольку одна фаза не будет генерировать вращающееся магнитное поле само по себе. Следовательно, в асинхронных двигателях используются конструкции с расщепленной фазой, конденсаторным пуском или конструкциями с экранированными полюсами. Небольшие синхронные однофазные двигатели, используемые в таймерах, часах, магнитофонах и т. п., основаны на магнитных или гистерезисных конструкциях.
п., основаны на магнитных или гистерезисных конструкциях.
КНИГИ
Красильщик. Катушки интенсивности: способы изготовления и использования: с описанием электрического освещения, электрических звонков, электродвигателей, телефона, микрофона и фонографа . Бостон: Adamant Media Corporation, 2005.
Эмади, Али. Энергоэффективные электродвигатели . Нью-Йорк: CRC, 2004.
Хьюз, Остин. Электродвигатели и приводы . Оксфорд, Великобритания: Newnes, 2005.
Iain A. McIntyre
Все о шунтирующих двигателях постоянного тока
Электрические двигатели принесли нам почти все современные удобства, позволив нам превратить электрическую энергию в физическое движение.Эти машины помогли нам создать такие чудеса, как автомобили, компьютеры, кондиционеры и многое другое, и все это благодаря разнообразию электродвигателей, доступных в промышленности. Двигатель постоянного тока — электродвигатель, в котором используется источник питания постоянного тока, такой как батарея, — является одной из наших самых старых, но наиболее широко используемых конструкций, и в этой статье будет рассмотрен один конкретный двигатель постоянного тока, шунтирующий двигатель постоянного тока. На первый взгляд может быть трудно увидеть уникальные свойства этого двигателя, но эта статья призвана помочь выделить эти различия и показать, почему инженеры могут предпочесть эту конструкцию другим моделям.Мы надеемся, что эта статья, изучая настройку, работу и технические характеристики шунтирующих двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при создании правильной машины для своего приложения.
На первый взгляд может быть трудно увидеть уникальные свойства этого двигателя, но эта статья призвана помочь выделить эти различия и показать, почему инженеры могут предпочесть эту конструкцию другим моделям.Мы надеемся, что эта статья, изучая настройку, работу и технические характеристики шунтирующих двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при создании правильной машины для своего приложения.
Что такое коллекторный двигатель постоянного тока и как он работает?
Шунтирующий двигатель постоянного тока — это просто особый тип щеточного двигателя постоянного тока, поэтому будет полезно сначала объяснить основные принципы, общие для всех этих конструкций (похожее объяснение можно найти в нашей статье о двигателях постоянного тока с последовательной обмоткой).Рисунок 1 дает упрощенное представление о том, как работают двигатели постоянного тока, и показан ниже:
Рис.
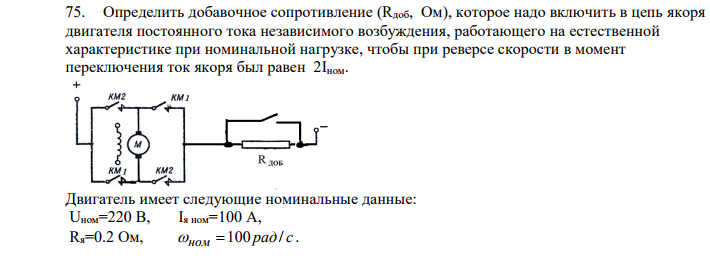 1: Упрощенная принципиальная схема двигателей постоянного тока. Обратите внимание, что поле статора не включено в схему, так как его размещение зависит от того, как работает двигатель постоянного тока.
1: Упрощенная принципиальная схема двигателей постоянного тока. Обратите внимание, что поле статора не включено в схему, так как его размещение зависит от того, как работает двигатель постоянного тока.
Все двигатели постоянного тока состоят из двух основных частей: статора — внешнего корпуса, содержащего поле статора, и ротора — вращающегося компонента, подключенного к источнику питания постоянного тока. Поле статора может состоять либо из настоящих постоянных магнитов, либо из проволочной обмотки (или «обмотки возбуждения», показанной на рис. 1), которые создают постоянное магнитное поле через узел ротора.Ротор состоит из якоря, обмоток якоря, выходного вала, коллекторов и щеток. Обмотка якоря представляет собой катушку проволоки, которая проходит через якорь или через пластины металла, направляющие обмотки якоря вокруг выходного вала. Эти якорные обмотки оканчиваются на кольцах коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки защелкиваются на кольцах коллектора и замыкают цепь на рис. 1, заставляя ток течь через щетки, кольца коллектора и обмотки якоря.При этом в якоре создается электромагнитное поле, противодействующее постоянному полю статора. Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном счете, полезную скорость/крутящий момент.
Когда оператор запускает двигатель, щетки защелкиваются на кольцах коллектора и замыкают цепь на рис. 1, заставляя ток течь через щетки, кольца коллектора и обмотки якоря.При этом в якоре создается электромагнитное поле, противодействующее постоянному полю статора. Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном счете, полезную скорость/крутящий момент.
Что такое шунтирующие двигатели постоянного тока и как они работают?
Теперь, когда мы показали общие принципы для всех двигателей постоянного тока, давайте взглянем на конкретное расположение шунтирующего двигателя постоянного тока, показанное ниже на рисунке 2:
Рис. 2: Принципиальная схема шунтирующих двигателей постоянного тока.Обратите внимание, что обмотка возбуждения подключена параллельно узлу ротора — это определяющая особенность шунтирующих двигателей постоянного тока.
Обмотка возбуждения, создающая постоянное магнитное поле в статоре, соединяется параллельно или параллельно с обмотками якоря в шунтирующих двигателях постоянного тока. Таким образом, для питания якоря и обмотки возбуждения используется один и тот же источник питания, а общий ток разделяется на два «параллельных» пути.
Таким образом, для питания якоря и обмотки возбуждения используется один и тот же источник питания, а общий ток разделяется на два «параллельных» пути.
Обмотка возбуждения в шунтирующих двигателях постоянного тока состоит из множества витков тонкой проволоки, чтобы увеличить силу магнитного поля и ограничить ток через катушку.Таким образом, ток через катушку возбуждения уменьшается и, таким образом, увеличивается в якоре (помните, что при параллельном соединении ток распределяется). Больший ток в якоре создает явление, известное как обратная ЭДС — электродвижущая сила, создаваемая магнитным полем якоря, вращающимся через поле статора, — а обратная ЭДС служит для уменьшения тока через обмотку якоря.
По мере увеличения скорости двигателя эта противо-ЭДС увеличивается (поскольку она пропорциональна скорости) и аналогичным образом уменьшается, если вращение якоря замедляется из-за увеличения нагрузки на вал.Это дает шунтирующим двигателям постоянного тока уникальную способность саморегулировать свою скорость, особенно когда на вал воздействует большая нагрузка, и поэтому они в просторечии известны как двигатели с постоянной скоростью.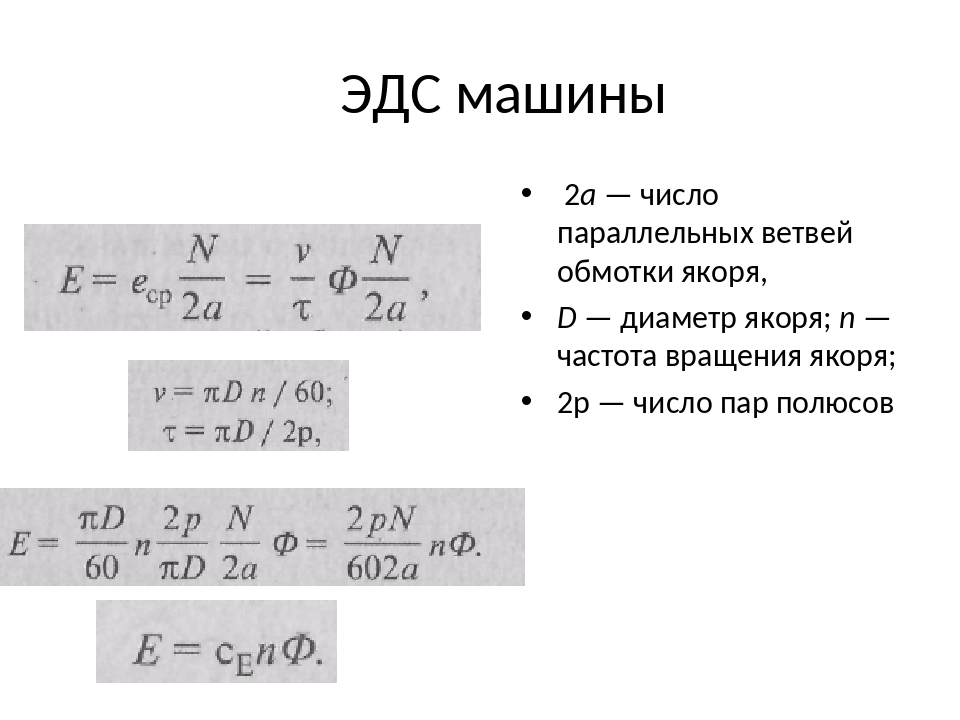 Таким образом, параллельные двигатели имеют низкий пусковой момент, но постоянную скорость; это противоположно двигателям постоянного тока с последовательным возбуждением, где их пусковой момент высок, но практически нет регулирования скорости (дополнительную информацию см. в нашей статье о двигателях постоянного тока с последовательным возбуждением). Они также обратимы простым изменением полярности катушки якоря или катушки возбуждения.
Таким образом, параллельные двигатели имеют низкий пусковой момент, но постоянную скорость; это противоположно двигателям постоянного тока с последовательным возбуждением, где их пусковой момент высок, но практически нет регулирования скорости (дополнительную информацию см. в нашей статье о двигателях постоянного тока с последовательным возбуждением). Они также обратимы простым изменением полярности катушки якоря или катушки возбуждения.
Технические характеристики параллельного двигателя постоянного тока
Полезно знать, на какие значения обращать внимание при выборе шунтирующего двигателя постоянного тока. В этой статье будут кратко рассмотрены некоторые общие спецификации, на которые следует обратить внимание, но знайте, что в большинстве спецификаций содержится гораздо больше информации, чем та, что представлена здесь.
Напряжение якоря/возбуждения
Из-за того, что обмотки якоря и обмотки возбуждения соединены параллельно, на каждый компонент приходится два отдельных напряжения (хотя и не на всю цепь; помните, что они используют один и тот же источник питания). В результате в большинстве спецификаций указаны два номинальных напряжения для шунтирующего двигателя постоянного тока, по одному на каждую катушку, часто с диапазонами. Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В с максимальным значением до 500 В и напряжение якоря 440 В с максимальным значением до 600 В. Обратите внимание, что эти значения зависят от типоразмера и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого ниже его номинального напряжения, так как это снижает производительность и может привести к перегреву.
В результате в большинстве спецификаций указаны два номинальных напряжения для шунтирующего двигателя постоянного тока, по одному на каждую катушку, часто с диапазонами. Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В с максимальным значением до 500 В и напряжение якоря 440 В с максимальным значением до 600 В. Обратите внимание, что эти значения зависят от типоразмера и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого ниже его номинального напряжения, так как это снижает производительность и может привести к перегреву.
Мощность и базовая скорость
Поскольку эти двигатели считаются двигателями с постоянной скоростью, обычно в спецификации указывается базовая скорость, а также соответствующая мощность (в л.с. или кВт).Эти значения показывают, что двигатель может перемещать и как быстро он может перемещать его, хотя двигатели постоянного тока с параллельным подключением могут регулировать свою скорость даже при изменении нагрузки (в пределах безопасных допусков).
Размер/размер рамы
Существуют стандартные размеры рамы, установленные NEMA, чтобы облегчить покупателю замену между продавцами двигателей, но обычно размеры двигателя всегда указываются, если они не стандартизированы. Размер рамы даст спецификатору представление о том, как двигатель подойдет для любого конкретного применения, и дает приблизительное представление о том, насколько мощным будет двигатель (хотя размер электродвигателя может ввести в заблуждение, поэтому будьте осторожны).
Срок службы щетки
Поскольку в шунтирующем двигателе постоянного тока для подключения источника питания к вращающемуся якорю используются щетки, они естественным образом со временем изнашиваются. Большинство двигателей постоянного тока имеют срок службы щеток (в часах), поэтому операторы могут записывать, как долго щетки использовались и когда их нужно заменить. Очень важно обслуживать эти двигатели, заменяя щетки при необходимости, иначе они могут выйти из строя или перестать работать.
Применение и критерии выбора
В отличие от серийных двигателей постоянного тока, шунтирующие двигатели постоянного тока лучше всего подходят для приложений с постоянной скоростью благодаря своей конструкции с обратной связью.Они могут поддерживать точное число оборотов и крутящий момент даже при различных условиях нагрузки, что делает их полезными для деревообрабатывающего оборудования, шлифовальных станков или любого другого вращающегося электроинструмента, где пользователь будет толкать против вращения. Обратите внимание, что эти двигатели имеют низкий пусковой крутящий момент, поэтому эти двигатели не могут быть подключены к большой нагрузке при запуске и должны ожидать использования на номинальной скорости. Они также немного теряют скорость при большой нагрузке, так как ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Эти двигатели очень просты в установке, с возможностью работы с регуляторами скорости.Чаще всего они используются в вышеупомянутых электроинструментах, а также в автомобильных стеклоочистителях, автомобильных окнах, компьютерных вентиляторах и т. д. Хотя изначально шунтирующие двигатели постоянного тока не такие мощные, как их родственники с последовательной обмоткой, они не колеблются при обеспечении своей механической мощности, обеспечивая пользователям постоянство по сравнению с чистой выходной мощностью.
Резюме
В этой статье представлено понимание того, что такое шунтирующие двигатели постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.ua.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- http://www2.mae.ufl.edu/designlab/Class%20Projects/Background%20Information/Electric%20DC%20motors.htm
Другие изделия для двигателей
Больше из Машины, инструменты и расходные материалы
курсов PDH онлайн. PDH для профессиональных инженеров. ПДХ Инжиниринг.
«Мне нравится широта ваших курсов HVAC; не только экологичность или энергосбережение
курсы.»
Рассел Бейли, ЧП
Нью-Йорк
«Это укрепило мои текущие знания и научило меня еще нескольким новым вещам
для раскрытия мне новых источников
информации.»
Стивен Дедук, П.Е.
Нью-Джерси
«Материал был очень информативным и организованным. Я многому научился, и они были
очень быстро отвечают на вопросы.
Это было на высшем уровне. Буду использовать
еще раз. Спасибо.»
Блэр Хейворд, ЧП
Альберта, Канада
«Веб-сайт прост в использовании. Хорошо организован. Я обязательно воспользуюсь вашими услугами снова.
Я передам вашу компанию
имя другим на работе.»
Рой Пфлейдерер, ЧП
Нью-Йорк
«Справочный материал был превосходным, и курс был очень информативным, тем более что я думал, что уже знаком
с реквизитами Канзас
Авария в городе Хаятт.»
Майкл Морган, П.Е.
Техас
«Мне очень нравится ваша бизнес-модель. Мне нравится возможность просмотреть текст перед покупкой. Я нашел класс
информативный и полезный
на моей работе.»
Уильям Сенкевич, Ч.Е.
Флорида
«У вас отличный выбор курсов и очень информативные статьи. Вам
— лучшее, что я нашел.»
Рассел Смит, ЧП
Пенсильвания
«Я считаю, что такой подход позволяет работающему инженеру легко зарабатывать PDH, предоставляя время для просмотра
материал.»
Хесус Сьерра, ЧП
Калифорния
«Спасибо, что разрешили мне просмотреть неправильные ответы. На самом деле,
человек узнает больше
от сбоев.»
Джон Скондрас, ЧП
Пенсильвания
«Курс был хорошо составлен, и использование тематических исследований является эффективным
способ обучения.»
Джек Лундберг, ЧП
Висконсин
«Я очень впечатлен тем, как вы представляете курсы, т.е. позволяете
студент для ознакомления с курсом
материал перед оплатой и
получение викторины.»
Арвин Свангер, ЧП
Вирджиния
«Спасибо, что предлагаете все эти замечательные курсы. Я, конечно, выучил и
очень понравилось.»
Мехди Рахими, ЧП
Нью-Йорк
«Я очень доволен предлагаемыми курсами, качеством материалов и простотой поиска и
подключение к Интернету
курсы.»
Уильям Валериоти, ЧП
Техас
«Этот материал в значительной степени оправдал мои ожидания. Курс был легким для понимания. Фотографии в основном давали хорошее представление о
обсуждаемые темы.»
Майкл Райан, ЧП
Пенсильвания
«Именно то, что я искал. Нужен 1 балл по этике, и я нашел его здесь.»
Джеральд Нотт, ЧП
Нью-Джерси
«Это был мой первый онлайн-опыт получения необходимых кредитов PDH. Это был
информативно, выгодно и экономично.
Очень рекомендую
всем инженерам.»
Джеймс Шурелл, ЧП
Огайо
«Я ценю, что вопросы «реального мира» и имеют отношение к моей практике, и
не основано на каком-то непонятном разделе
законов, которые не применяются
— «обычная» практика.»
Марк Каноник, ЧП
Нью-Йорк
«Отличный опыт! Я многому научился, чтобы использовать его в своем медицинском устройстве
организация.»
Иван Харлан, ЧП
Теннесси
«Материал курса имеет хорошее содержание, не слишком математический, с хорошим акцентом на практическое применение технологий.»
Юджин Бойл, П.Е.
Калифорния
«Это был очень приятный опыт. Тема была интересной и хорошо представлена,
а онлайн формат был очень
доступно и просто
использование. Большое спасибо.»
Патрисия Адамс, ЧП
Канзас
«Отличный способ добиться соответствия непрерывному образованию PE в рамках временных ограничений лицензиата.»
Джозеф Фриссора, ЧП
Нью-Джерси
«Должен признаться, я действительно многому научился. Распечатанная викторина помогает во время
просмотр текстового материала. я
также оценил просмотр
предоставлены фактические случаи.»
Жаклин Брукс, ЧП
Флорида
«Документ Общие ошибки ADA в проектировании помещений очень полезен.
тест действительно требовал исследований в
документ но ответы были
всегда в наличии.»
Гарольд Катлер, ЧП
Массачусетс
«Это было эффективное использование моего времени. Спасибо за разнообразие выбора
в дорожной технике, который мне нужен
для выполнения требований
Сертификация PTOE.»
Джозеф Гилрой, ЧП
Иллинойс
«Очень удобный и доступный способ заработать CEU для выполнения моих требований в штате Делавэр.»
Ричард Роудс, ЧП
Мэриленд
«Узнал много нового о защитном заземлении. До сих пор все курсы, которые я проходил, были отличными.
Надеюсь увидеть больше 40%
курсы со скидкой.»
Кристина Николас, ЧП
Нью-Йорк
«Только что сдал экзамен по радиологическим стандартам и с нетерпением жду дополнительных
курсы. Процесс прост, и
намного эффективнее, чем
необходимость путешествовать.»
Деннис Мейер, ЧП
Айдахо
«Услуги, предоставляемые CEDengineering, очень полезны для профессионалов
Инженеры для получения блоков PDH
в любое время.Очень удобно.»
Пол Абелла, ЧП
Аризона
«Пока все было отлично! Поскольку я постоянно работаю матерью двоих детей, у меня не так много
пора искать куда
получить мои кредиты от.»
Кристен Фаррелл, ЧП
Висконсин
«Это было очень информативно и поучительно.Простой для понимания с иллюстрациями
и графики; определенно получается
проще впитать все
теорий.»
Виктор Окампо, P.Eng.
Альберта, Канада
«Хороший обзор принципов полупроводников. Мне понравилось проходить курс по телефону
.
мой собственный темп во время моего утра
на метро
на работу.»
Клиффорд Гринблатт, ЧП
Мэриленд
«Просто найти интересные курсы, скачать документы и получить
викторина. Я бы очень рекомендую
вам в любой PE нуждающийся
Единицы CE.»
Марк Хардкасл, ЧП
Миссури
«Очень хороший выбор тем во многих областях техники.»
Рэндалл Дрейлинг, ЧП
Миссури
«Я заново узнал то, что забыл. Я также рад принести пользу в финансовом плане
от ваш рекламный адрес электронной почты который
сниженная цена
на 40%.»
Конрадо Касем, П.Е.
Теннесси
«Отличный курс по разумной цене. Буду пользоваться вашими услугами в будущем.»
Чарльз Флейшер, ЧП
Нью-Йорк
«Это был хороший тест, и я фактически проверил, что я прочитал профессиональную этику
Коды
и Нью-Мексико
правила.»
Брун Гильберт, П.Е.
Калифорния
«Мне очень понравились занятия. Они стоили времени и усилий.»
Дэвид Рейнольдс, ЧП
Канзас
«Очень доволен качеством тестовых документов. Будет использовать CEDengineerng
при необходимости
Сертификация
.»
Томас Каппеллин, П.Е.
Иллинойс
«У меня истек срок действия курса, но вы все равно выполнили обязательство и дали
мне то, за что я заплатил — много
спасибо!»
Джефф Ханслик, ЧП
Оклахома
«CEDengineering предлагает удобные, экономичные и актуальные курсы
для инженера.»
Майк Зайдл, П.Е.
Небраска
«Курс был по разумной цене, а материал был кратким и
хорошо организовано.»
Глен Шварц, ЧП
Нью-Джерси
«Вопросы соответствовали урокам, а материал урока
хороший справочный материал
для дизайна под дерево.»
Брайан Адамс, П.Е.
Миннесота
«Отлично, удалось получить полезную информацию с помощью простого телефонного звонка.»
Роберт Велнер, ЧП
Нью-Йорк
«У меня был большой опыт прохождения программы «Строительство прибрежных зон — Проектирование»
Корпус Курс и
очень рекомендую.»
Денис Солано, ЧП
Флорида
«Очень понятный, хорошо организованный веб-сайт. Материалы курса этики штата Нью-Джерси очень понравились
прекрасно приготовлено.»
Юджин Брэкбилл, ЧП
Коннектикут
«Очень хороший опыт. Мне нравится возможность скачивать учебные материалы на
обзор где угодно и
когда угодно.»
Тим Чиддикс, ЧП
Колорадо
«Отлично! Поддерживайте широкий выбор тем на выбор.»
Уильям Бараттино, ЧП
Вирджиния
«Процесс прямой, никакой чепухи. Хороший опыт.»
Тайрон Бааш, П.Е.
Иллинойс
«Вопросы на экзамене были пробными и демонстрировали понимание
материала. Тщательный
и полный.»
Майкл Тобин, ЧП
Аризона
«Это мой второй курс, и мне понравилось то, что курс предложил мне, что
поможет в моей линии
работы.»
Рики Хефлин, ЧП
Оклахома
«Очень быстрая и простая навигация. Я определенно воспользуюсь этим сайтом снова.»
Анджела Уотсон, ЧП
Монтана
«Прост в исполнении. Нет путаницы при подходе к сдаче теста или записи сертификата.»
Кеннет Пейдж, П.Е.
Мэриленд
«Это был отличный источник информации о нагревании воды с помощью солнечной энергии. Информативный
и отличное освежение.»
Луан Мане, ЧП
Коннетикут
«Мне нравится подход к подписке и возможности читать материалы в автономном режиме, а затем
вернись, чтобы пройти тест.»
Алекс Млсна, П.Е.
Индиана
«Я оценил количество информации, предоставленной для класса. Я знаю
это вся информация, которую я могу
использование в реальных жизненных ситуациях.»
Натали Дерингер, ЧП
Южная Дакота
«Материалы обзора и образец теста были достаточно подробными, чтобы я мог
успешно завершено
курс.»
Ира Бродская, ЧП
Нью-Джерси
«Веб-сайт прост в использовании, вы можете скачать материал для изучения, а затем вернуться
и пройти тест. Очень
удобный а на моем
собственное расписание.»
Майкл Гладд, ЧП
Грузия
«Спасибо за хорошие курсы на протяжении многих лет.»
Деннис Фундзак, ЧП
Огайо
«Очень легко зарегистрироваться, получить доступ к курсу, пройти тест и распечатать PDH
сертификат
. Спасибо за создание
процесс простой.»
Фред Шайбе, ЧП
Висконсин
«Положительный опыт.Быстро нашел подходящий мне курс и закончил
PDH за один час в
один час.»
Стив Торкилдсон, ЧП
Южная Каролина
«Мне понравилась возможность загрузки документов для ознакомления с содержанием
и пригодность до
наличие для оплаты
материал .»
Ричард Ваймеленберг, ЧП
Мэриленд
«Это хорошее пособие по ЭЭ для инженеров, не являющихся электриками.»
Дуглас Стаффорд, ЧП
Техас
«Всегда есть место для улучшения, но я ничего не могу придумать в вашем
процесс, которому требуется
улучшение.»
Томас Сталкап, ЧП
Арканзас
«Мне очень нравится удобство прохождения викторины онлайн и получения немедленного
Сертификат
.»
Марлен Делани, ЧП
Иллинойс
«Обучающие модули CEDengineering — очень удобный способ доступа к информации по
многие различные технические области снаружи
по собственной специализации без
необходимость путешествовать.»
Гектор Герреро, ЧП
Грузия
Сельскохозяйственная механика и технологические системы
- Спинка
- Внедрение аккумуляторных батарей на основе _____ повысило использование электродвигателей для работы некоторых беспроводных садовых инструментов.
- Электродвигатели преобразуют электрическую энергию в _____ энергии.
- На силу вращения двигателя влияют _____ входного электрического тока и напряженность магнитных полей.
- _____ используются для поддержки вращающегося вала электродвигателя большой мощности.
- Физический размер и мощность _____ можно использовать для группировки двигателей.
- В двигателе с последовательным возбуждением обмотки статора соединены последовательно с якорем, а в двигателе с _____обмоткой обмотки статора соединены параллельно с обмоткой якоря.
- Четырехполюсный двигатель с расщепленной фазой, питаемый переменным током частотой 60 Гц, будет вращаться со скоростью около _____ об/мин при полной нагрузке.
- Как только однофазные асинхронные двигатели достигают заданной скорости, переключатель (n) _____ отключает пусковую цепь, позволяя двигателю работать только на индукции.
- _____, в котором перечислены важные данные двигателя, расположены на внешней стороне корпуса двигателя, где они хорошо видны.
- Система ремня и шкива потребляет около _____ мощности, производимой электродвигателем.
- Защитные устройства для цепей двигателя содержат компоненты с выдержкой времени, которые допускают кратковременные периоды перегрузки, необходимые для двигателя _____.
- Электродвигатели защищенные _____ имеют устройства защиты от перегрузки, встроенные в конструкцию двигателя.
- Коммутационные устройства для электродвигателей часто используют электромагнитные _____ для питания цепи двигателя, чтобы выдерживать значительные токовые нагрузки, возникающие при пуске.
- Преобразователь частоты можно использовать для контроля и управления _____ трехфазного электродвигателя.
- Увеличение размера ведомого шкива при использовании того же ведущего шкива приведет к _____ числу оборотов оборудования.
- Ремень _____ измеряется и проверяется путем отклонения ремня от его нормального пути в заданной точке с применением определенной силы.
- Реверсирование соединений с рабочими обмотками изменит направление вращения в электродвигателях с расщепленной фазой и _____-запуском.
- Чрезмерный слой пыли снаружи электродвигателя подобен одеялу, которое снижает способность двигателя рассеивать _____.
- _____ может привести к скоплению комков мусора, которые мешают правильной работе электродвигателя.
- Оборудование, использующее ремень и шкивы, должно быть оснащено _____ для предотвращения случайного контакта с движущимися частями.
Ваше имя
Ваш адрес электронной почты
Отправьте себе копию
Электронная почта вашего инструктора
Электронная почта дополнительного получателя (необязательно)
Комментарии
Я подтверждаю, что вводил правильно и готов отправить
Двигатель постоянного тока с постоянными магнитами
(двигатель постоянного тока с постоянными магнитами) — как они работают?
Что такое двигатель постоянного тока с постоянными магнитами (двигатель постоянного тока с постоянными магнитами)?
В двигателе постоянного тока якорь вращается внутри магнитного поля.Основной принцип работы двигателя постоянного тока основан на том факте, что всякий раз, когда проводник с током помещается в магнитное поле, на этот проводник действует механическая сила.
Все типы двигателей постоянного тока работают по этому принципу. Следовательно, для создания двигателя постоянного тока необходимо создать магнитное поле. Магнитное поле создается с помощью магнита. Вы можете использовать разные типы магнитов — это может быть электромагнит или постоянный магнит.
A Двигатель постоянного тока с постоянными магнитами ( Двигатель постоянного тока с постоянными магнитами ) представляет собой тип двигателя постоянного тока, в котором используется постоянный магнит для создания магнитного поля, необходимого для работы двигателя постоянного тока.
Вы когда-нибудь пользовались игрушкой на батарейках? Двигатель, который приводит в движение эти игрушки, представляет собой не что иное, как двигатель постоянного тока с постоянными магнитами или двигатель постоянного тока PMDC . Эти типы двигателей просты по конструкции.
Они обычно используются в качестве стартера в автомобилях, стеклоочистителях, омывателях, вентиляторах, используемых в обогревателях и кондиционерах, для подъема и опускания окон, а также широко используются в игрушках.
Поскольку напряженность магнитного поля постоянного магнита является фиксированной, ею нельзя управлять извне, управление полем этого типа двигателя постоянного тока невозможно.
Таким образом, двигатель постоянного тока с постоянными магнитами используется там, где нет необходимости контролировать скорость двигателя (что обычно делается путем управления магнитным полем). Небольшие дробные и субдробные двигатели кВт часто конструируются с использованием постоянного магнита.
Конструкция двигателя постоянного тока с постоянными магнитами или двигателя постоянного тока с постоянными магнитами
Как указано в названии двигателя постоянного тока с постоянными магнитами, полюса возбуждения этого двигателя в основном изготовлены из постоянного магнита.
Двигатель PMDC в основном состоит из двух частей. Статор и якорь. Здесь статор представляет собой стальной цилиндр. Магниты установлены на внутренней периферии этого цилиндра.
Постоянные магниты устанавливаются таким образом, что полюса N и S каждого магнита попеременно обращены к якорю, как показано на рисунке ниже. Это означает, что если N-полюс одного магнита обращен к якорю, то S-полюс следующего магнита обращен к якорю.
В дополнение к удержанию магнита на его внутренней периферии, стальной цилиндрический статор также служит в качестве пути возврата магнитного потока с низким магнитным сопротивлением.
Хотя катушка возбуждения не требуется в двигателе постоянного тока с постоянными магнитами, иногда обнаруживается, что они используются вместе с постоянными магнитами.
Это связано с тем, что если постоянные магниты теряют свою силу, эти потери магнитной силы можно компенсировать путем возбуждения поля через эти катушки возбуждения. Как правило, в этих постоянных магнитах используются редкоземельные магнитно-твердые материалы.
Ротор двигателя постоянного тока подобен другим двигателям постоянного тока. Ротор или якорь двигателя постоянного тока с постоянными магнитами также состоит из сердечника, обмоток и коллектора.Сердечник арматуры выполнен из изолированного ряда лаков, щелевого кругового проката из стальных листов.
При соединении этих круглых стальных листов один за другим образуется сердечник арматуры цилиндрической формы с прорезями. Многослойные стальные листы с лаковой изоляцией используются для уменьшения потерь на вихревые токи в якоре двигателя постоянного тока с постоянными магнитами.
Эти прорези на внешней периферии сердечника якоря используются для размещения в них проводников якоря. Проводники якоря соединены соответствующим образом, образующим обмотку якоря.
Концевые выводы обмотки присоединяются к сегментам коллектора, размещенным на валу двигателя. Как и в других двигателях постоянного тока, угольные или графитовые щетки размещаются с пружинным давлением на сегментах коллектора для подачи тока на якорь.
Принцип работы двигателя постоянного тока с постоянными магнитами или двигателя постоянного тока с постоянными магнитами
Как мы уже говорили ранее, принцип работы двигателя постоянного тока аналогичен общему принципу работы двигателя постоянного тока. То есть, когда несущий проводник попадает внутрь магнитного поля, на проводник действует механическая сила, и направление этой силы определяется правилом левой руки Флеминга.
Как и в двигателе постоянного тока с постоянными магнитами, якорь находится внутри магнитного поля постоянного магнита; якорь вращается в направлении создаваемой силы.
Здесь на каждый проводник якоря действует механическая сила F = BIL Ньютон, где B — напряженность магнитного поля в теслах (вебер/м2), I — ток в амперах, протекающий через этот проводник, а L — длина проводника в метр попадает под действие магнитного поля.
На каждый проводник якоря действует сила, и совокупность этих сил создает крутящий момент, который стремится вращать якорь.
Эквивалентная схема двигателя постоянного тока с постоянными магнитами или двигателя постоянного тока с постоянными магнитами
Как и в двигателе постоянного тока с постоянными магнитами, поле создается постоянным магнитом, нет необходимости рисовать катушки возбуждения в эквивалентной схеме двигателя постоянного тока с постоянными магнитами.
Напряжение питания якоря будет иметь падение сопротивления якоря, а остальной части напряжения питания противодействует противо-ЭДС двигателя. Следовательно, уравнение напряжения двигателя определяется как
Где I — ток якоря, а R — сопротивление якоря двигателя.
E b — противоэдс, а V — напряжение питания.
Преимущества двигателя постоянного тока с постоянными магнитами или двигателя постоянного тока с постоянными магнитами
Преимущества двигателя постоянного тока с постоянными магнитами:
- Нет необходимости в установке возбуждения возбуждения.
- Не потребляется входная мощность для возбуждения, что повышает эффективность двигателя постоянного тока.
- Нет катушки возбуждения, поэтому экономится место для катушки возбуждения, что уменьшает общий размер двигателя.
- Дешевле и экономичнее для приложений с дробной мощностью в кВт.
Недостатки двигателя постоянного тока с постоянными магнитами или двигателя с постоянными магнитами
Недостатки двигателя постоянного тока с постоянными магнитами: реакция якоря.
Применение двигателя постоянного тока с постоянными магнитами или двигателя постоянного тока с постоянными магнитами
Двигатель постоянного тока с постоянными магнитами широко используется там, где требуются небольшие двигатели постоянного тока, а также не требуется очень эффективное управление, например, в автомобильных стартерах, игрушках, стеклоочистителях, шайбах, вентиляторах. , кондиционеры, компьютерные дисководы и многое другое.
Патент США на систему электродвигателя постоянного тока и способ использования того же патента (Патент № 5,483,615, выданный 9 января 1996 г.)
ТЕХНИЧЕСКАЯ ОБЛАСТЬ
Изобретение относится к электродвигателям постоянного тока. В частности, изобретение относится к усовершенствованной конструкции, в которой двигатель функционирует и работает по существу так же, как обычный электродвигатель постоянного тока с последовательной обмоткой против противоположной нагрузки, и функционирует и работает по существу так же, как обычный электрический генератор постоянного тока с параллельной обмоткой для ограничения скорость вращения машины против вспомогательной нагрузки.
ФОН
Ежегодно производится более 100 000 новых автомобилей для гольфа. Приблизительно 60% новых автомобилей для гольфа приводятся в движение электродвигателями постоянного тока с последовательной обмоткой. Остальные 40% новых автомобилей для гольфа приводятся в движение бензиновыми или пропановыми двигателями внутреннего сгорания.
Электродвигатели постоянного тока
являются предпочтительным средством обеспечения движущей силы для автомобилей для гольфа, в первую очередь из-за снижения затрат на техническое обслуживание и наименьшего ущерба для окружающей среды.Кроме того, практически во всех электрических автомобилях для гольфа используются двигатели постоянного тока с последовательной обмоткой. Характеристики, присущие двигателю постоянного тока с последовательной обмоткой, делают его идеальным для использования с автомобилем для гольфа. Неотъемлемые характеристики включают высокий крутящий момент при низких скоростях для подъема на холм и высокую скорость при низком крутящем моменте для ровной поверхности.
Торможение на спуске необходимо для автомобилей для гольфа на холмах, чтобы предотвратить опасный разгон в случае отказа тормозов. Двигатель внутреннего сгорания обеспечивает торможение двигателем при отпускании дроссельной заслонки, особенно со встроенным регулятором, который используется в автомобилях для гольфа.С другой стороны, двигатели постоянного тока с последовательной обмоткой не обеспечивают торможения на спуске и могут разгоняться на спуске. В результате операторы холмистых полей для гольфа часто вынуждены использовать в автомобилях для гольфа менее желательные бензиновые или пропановые двигатели внутреннего сгорания из соображений безопасности. Следовательно, желательно иметь электродвигатель постоянного тока с характеристиками двигателя постоянного тока с последовательным возбуждением, который обеспечивает торможение на спуске.
Производители электромобилей для гольфа разработали несколько устройств для обеспечения электрического торможения.Наиболее распространенное устройство состоит в том, чтобы обеспечить средства для «подключения-торможения» или включения двигателя для работы в качестве двигателя в обратном направлении вращения при движении вперед вниз по склону. В случае отказа тормоза водитель автомобиля для гольфа должен не забыть переключить переключатель направления в положение заднего хода и тщательно контролировать дроссельную заслонку, чтобы предотвратить вредные силы замедления.
В большинстве производимых сегодня электромобилей для гольфа используются электронные регуляторы скорости. Эти контроллеры включают в себя специальную схему для управления тормозящими силами во время операции «включение-торможение», но водитель автомобиля для гольфа все еще должен иметь присутствие духа, чтобы переключить переключатель направления в положение заднего хода.Кроме того, торможение вилкой разряжает батарею и может привести к перегреву электродвигателя.
Чтобы избежать проблем, связанных с торможением последовательно подключенных двигателей постоянного тока, было предложено использовать действие электрического генератора для электрического торможения. Однако обычные электродвигатели постоянного тока с последовательной обмоткой не могут переходить от работы двигателя к работе генератора. При переходе от работы двигателя к работе генератора ток якоря должен изменить направление, в то время как ток возбуждения должен продолжать течь в исходном направлении.Характер расположения частей двигателя постоянного тока с последовательной обмоткой не позволяет току течь в двух разных направлениях в одной и той же цепи с последовательным соединением.
Чтобы преодолеть естественные ограничения двигателя постоянного тока с последовательной обмоткой, механизмы переключения повторно подключают двигатель постоянного тока с последовательной обмоткой в конфигурации с параллельной обмоткой. Механизмы переключения могут использоваться для повторного подключения обмоток электромагнитного поля параллельно обмоткам якоря, так что машина может работать как генератор постоянного тока с параллельной обмоткой для обеспечения электрического торможения.Эти схемы «двигатель-генератор», использующие механизмы переключения, требуют контакторов большой мощности для повторного включения. Силовые контакторы, как правило, слишком дороги для использования в серийных электрических автомобилях для гольфа. Кроме того, неисправность одного из контакторов в схеме переключения может привести к тому, что гольф-кар неудержимо уедет.
Следовательно, было бы очень желательно иметь новую и улучшенную систему электродвигателя постоянного тока, которая преобразуется из работы в качестве двигателя постоянного тока с последовательной обмоткой в работу в качестве генератора постоянного тока с параллельной обмоткой и наоборот без использования контакторов большой мощности.Такая система электродвигателя должна быть относительно недорогой в производстве.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Таким образом, основная цель настоящего изобретения состоит в том, чтобы предоставить новую и улучшенную систему электродвигателя постоянного тока, которая не требует контакторов большой мощности для преобразования работы в качестве двигателя постоянного тока с последовательной обмоткой в работу в качестве генератора постоянного тока с параллельной обмоткой. система электродвигателя относительно недорога в производстве.
Вкратце, вышеуказанные и дополнительные цели настоящего изобретения реализуются путем предоставления новой и улучшенной системы электрического двигателя постоянного тока и способа ее использования.
Система электрического двигателя постоянного тока по настоящему изобретению включает в себя электрический двигатель постоянного тока, имеющий обмотки якоря, проводящие электрический ток якоря, и обмотки электромагнитного поля, проводящие ток возбуждения. Система электродвигателя постоянного тока дополнительно включает в себя преобразователь/контроллер постоянного тока для измерения величины электрического тока якоря и для управления величиной электрического тока возбуждения в соответствии с по существу постоянным фиксированным соотношением, при этом величина электрического тока возбуждения равна прямо пропорциональна величине электрического тока якоря.В результате величина ампер-витковой силы электромагнитного поля двигателя постоянного тока прямо пропорциональна величине электрического тока якоря в цепи обмотки якоря двигателя, и двигатель постоянного тока работает практически так же, как обычный двигатель. двигатель постоянного тока с последовательной обмоткой.
В известном известном двигателе постоянного тока с последовательной обмоткой обмотки электромагнитного поля соединены последовательно с якорем двигателя, и электрический ток протекает через обмотки якоря и через последовательно соединенные обмотки электромагнитного поля.Таким образом, величина напряженности поля в ампер-витках обычного двигателя постоянного тока с последовательной обмоткой по существу всегда прямо пропорциональна величине тока якоря.
Двигатель постоянного тока с последовательной обмоткой, используемый в типичном серийном электрическом автомобиле для гольфа, имеет обмотку возбуждения с 8 витками на катушку. Величина напряженности поля электромагнитного поля в ампер-витках практически всегда будет равна 8-кратной величине постоянного электрического тока в цепи якоря двигателя.
При постоянном токе 100 ампер в цепи якоря двигателя с обмоткой возбуждения 8 витков на виток напряженность поля составляет 800 ампер-витков на полюс.
В примерном двигателе по настоящему изобретению обмотка возбуждения с 8 витками на виток двигателя постоянного тока с обмоткой для гольф-кара заменена обмоткой возбуждения со 120 витками на виток в соответствии с настоящим изобретением. Кроме того, схема обмотки возбуждения со 120 витками на катушку двигателя по настоящему изобретению имеет цепь для протекания электрического тока, которая не соединена последовательно с цепью для протекания электрического тока в обмотках якоря двигателя. настоящего изобретения.
Преобразователь/контроллер постоянного тока, подключенный к примерному двигателю по настоящему изобретению, предназначен для измерения величины электрического тока в цепи обмотки якоря и настроен для управления величиной электрического тока в обмотках электромагнитного поля двигателя. согласно соотношению ток возбуждения/ток якоря 1/15.
В результате сила электромагнитного поля в ампер-витках примерного двигателя по настоящему изобретению практически всегда будет пропорциональна величине постоянного электрического тока, протекающего в цепи обмотки якоря, с коэффициентом 120.раз.1/15=8.
Таким образом, ток якоря 100 ампер в якоре примерного двигателя по настоящему изобретению приведет к напряженности поля (100×1/15)×120=800 ампер-витков в электромагнитном поле примерного двигателя. мотор.
Как следствие, эксплуатационные характеристики (скорость вращения, ток якоря и сила тока в ампер-витках) приведенной в качестве примера двигательной системы по настоящему изобретению, действующей как двигатель против противодействующей нагрузки, практически всегда такие же, как у эквивалентного обычный двигатель постоянного тока с серийной обмоткой предшествующего уровня техники.
Фундаментальные базовые принципы, лежащие в основе функционирования системы электрического двигателя постоянного тока по настоящему изобретению, хорошо известны специалистам-практикам в области проектирования электрических двигателей постоянного тока и проектирования электрических генераторов постоянного тока.
Крутящий момент T d , развиваемый электродвигателем постоянного тока, может быть выражен как мотор.
В электромагнитном двигателе или генераторе величина магнитного потока является функцией и изменяется в зависимости от величины силы электромагнитного поля в ампер-витках с учетом нелинейных эффектов магнитного насыщения пути магнитного потока .
В обычном двигателе с параллельным возбуждением предшествующего уровня техники с относительно фиксированной напряженностью поля в ампер-витках магнитный поток остается относительно постоянным по мере увеличения тока якоря. При больших нагрузках с большими токами якоря сила тока якоря в ампер-витках противодействует силе электромагнитного поля в ампер-витках и может, в типичном известном устройстве с шунтовой обмоткой, уменьшить общий магнитный поток, необходимый для создания T . .д. Таким образом, вращающий момент, развиваемый машиной с шунтирующим возбуждением, увеличивается только при увеличении тока якоря, а момент на ампер остается относительно постоянным или уменьшается при увеличении тока якоря при увеличении нагрузки.
В обычном двигателе с последовательной обмоткой известного уровня техники сила электромагнитного поля в ампер-витках увеличивается по мере увеличения тока якоря, увеличивая магнитный поток по мере увеличения тока якоря. В результате развиваемый крутящий момент двигателя с последовательным возбуждением увеличивается примерно пропорционально квадрату тока якоря с учетом нелинейных эффектов магнитного насыщения магнитного пути в двигателе. Таким образом, двигатель с последовательным возбуждением развивает наибольший общий крутящий момент и наибольший крутящий момент на ампер постоянного тока.
Вращение обмоток якоря машины постоянного тока в установившемся в машине магнитном поле вызывает появление напряжения в обмотках якоря. Это внутренне генерируемое напряжение (E G ) противодействует подаваемому извне напряжению, приложенному к клеммам якоря машины.
Внутреннее генерируемое напряжение, E G , машины постоянного тока можно выразить следующим образом: E G = k x RPM x (магнитный поток), где k — та же постоянная обмотки, что и в уравнении для Т.подд. Величина внутреннего генерируемого напряжения (E G ) определяет максимальную скорость вращения электрической машины постоянного тока, действующей как двигатель. Всякий раз, когда E G меньше, чем внешнее напряжение, подаваемое на клеммы якоря, ток может течь в обмотки якоря, создавая крутящий момент двигателя для приведения в действие противодействующей нагрузки. Всякий раз, когда E G превышает внешнее напряжение, подаваемое на клеммы якоря, ток будет течь из обмоток якоря обратно в батарею или другой источник питания, развивая крутящий момент генератора, чтобы противодействовать любому увеличению скорости вращения двигателя.
Таким образом, при относительно фиксированном внешнем напряжении, подаваемом на клеммы якоря двигателя, максимальной скоростью электродвигателя постоянного тока можно управлять, регулируя E G , который управляется величиной магнитного потока, который в свою очередь регулируется величиной ампер-витка напряженности электромагнитного поля в электрической машине постоянного тока.
В примерной двигательной системе по настоящему изобретению предусмотрены средства для выборочного установления одной или нескольких минимальных величин электрического тока в цепи электромагнитного поля, чтобы напряженность поля в ампер-витках и, следовательно, величина магнитного потока в машине , практически никогда не упадет ниже заданного минимального предела.
В результате двигатель по настоящему изобретению имеет одну или несколько выборочно заданных максимальных скоростей вращения, при которых он может работать как двигатель. Скорость вращения выше любой из выборочно заданных максимальных скоростей вращения приведет к тому, что величина внутреннего генерируемого напряжения E G машины превысит величину напряжения, подаваемого от внешнего источника энергии, и двигатель будет функционировать как генератор, противодействующий дальнейшему увеличению скорости вращения машины.
В примерном автомобиле для гольфа по настоящему изобретению нажатие на педаль газа электрического автомобиля для гольфа подает питание на регулятор скорости двигателя, а также вызывает подачу питания на обмотки электромагнитного поля двигателя с заданной минимальной величиной электрического тока.
Заданная минимальная величина электрического тока в обмотках электромагнитного поля примерного двигателя по настоящему изобретению выбирается для ограничения максимальной скорости вращения двигателя до некоторой выбранной заданной величины.При скоростях вращения выше выбранной максимальной скорости внутреннее генерируемое напряжение E G двигателя превышает приложенное внешнее напряжение на клеммах, и двигатель автоматически становится обычным генератором с параллельным возбуждением, развивающим крутящий момент, противодействующий любому дальнейшему увеличению скорости вращения. машины. При скоростях вращения ниже выбранной максимальной скорости E G меньше, чем внешнее напряжение, подаваемое на клеммы якоря двигателя, и машина работает как двигатель, управляемый преобразователем/контроллером постоянного тока по настоящему изобретению.
Таким образом, двигатель по настоящему изобретению автоматически обеспечивает работу двигателя постоянного тока с последовательной обмоткой ниже заданной максимальной скорости вращения и действие генератора с параллельным возбуждением для рекуперативного электрического торможения при скоростях вращения выше заданной скорости.
Отпускание дроссельной заслонки примерного автомобиля для гольфа по настоящему изобретению приводит к наложению электрического тока второй большей величины в цепи обмотки электромагнитного поля. Эффект этой второй большей величины тока электрического поля заключается в дополнительном увеличении минимальной напряженности поля в ампер-витках и минимальной величины магнитного потока для дальнейшего уменьшения значения или величины максимальной скорости вращения, при которой может работать двигатель по настоящему изобретению. или работать как двигатель, прежде чем действовать как генератор с шунтовой обмоткой, развивающий крутящий момент, противодействующий дальнейшему увеличению скорости вращения машины.
Нажатие педали тормоза в примерном автомобиле для гольфа по настоящему изобретению приводит к наложению электрического тока третьей, еще большей величины в цепи обмотки электромагнитного поля. Эффект этой третьей, еще большей величины тока электрического поля состоит в том, чтобы еще больше увеличить минимальную напряженность поля в ампер-витках и минимальную величину магнитного потока, чтобы еще больше уменьшить величину максимальной скорости вращения, при которой двигатель этого двигателя изобретение может функционировать или работать как двигатель, прежде чем действовать как генератор с параллельным возбуждением, развивающий крутящий момент, противодействующий любому дальнейшему увеличению скорости вращения машины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые и другие цели и признаки настоящего изобретения и способ их достижения станут очевидными, а само изобретение будет лучше всего понято при обращении к последующему описанию варианта осуществления изобретения в сочетании с прилагаемыми чертежами, на которых :
РИС. 1 представляет собой принципиальную схему системы электрического двигателя предшествующего уровня техники, включающую двигатель постоянного тока с последовательной обмоткой;
РИС.2 представляет собой принципиальную схему системы электрического двигателя, которая сконструирована в соответствии с настоящим изобретением;
РИС. 3 представляет собой графическое изображение напряженности поля в ампер-витках известного электродвигателя постоянного тока с последовательной обмоткой по отношению к величине электрического тока в обмотках якоря известного электродвигателя постоянного тока с последовательной обмоткой, а также силы тока в ампер-витках. изменение напряженности поля по отношению к величине электрического тока в цепи, содержащей обмотки якоря электродвигателя постоянного тока, сконструированного в соответствии с настоящим изобретением;
РИС.4 представляет собой графическое представление напряженности поля в ампер-витках по отношению к величине электрического тока в цепи, содержащей обмотки якоря электродвигателя постоянного тока, сконструированного в соответствии с настоящим изобретением, при этом первая минимальная величина напряженности поля в ампер-витках устанавливается для электромагнитного поля двигателя;
РИС. 5 представляет собой графическое представление напряженности поля в ампер-витках по отношению к величине электрического тока в цепи, содержащей обмотки якоря электродвигателя постоянного тока, сконструированного в соответствии с настоящим изобретением, при этом вторая минимальная величина напряженности поля в ампер-витках устанавливается для электромагнитного поля двигателя; и
РИС.6 представляет собой принципиальную схему альтернативной системы электрического двигателя, которая сконструирована в соответствии с настоящим изобретением.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Обратимся теперь к чертежам и, в частности, к фиг. 1 показана система 110 электродвигателя предшествующего уровня техники в обесточенном состоянии.
Двигательная система 110 обычно включает в себя электродвигатель 120 постоянного тока, регулятор 118 скорости двигателя, соединенный с двигателем 120 для возбуждения двигателя 120, схему 116 активации, соединенную с регулятором скорости двигателя 118, для управления подачей электроэнергии на двигатель. 120 через регулятор 118 скорости двигателя и аккумулятор 113 для подачи электроэнергии постоянного тока на двигатель 120.Система 110 двигателя дополнительно включает в себя схему 122 дроссельной заслонки, подключенную между схемой 116 активации и регулятором 118 скорости двигателя для изменения скорости двигателя 120.
Якорь двигателя 119 соединен последовательно с обмоткой возбуждения двигателя 125, имеющей 8 витков на полюс. К обмотке 125 возбуждения присоединен переключатель 124 «вперед-нейтраль-реверс», позволяющий при необходимости реверсировать электрический ток, протекающий через обмотку 125 возбуждения.
Регулятор скорости двигателя 118 подключен к двигателю 120 между цепью активации 116 и якорем 119, а также между обмоткой возбуждения 125 и аккумулятором 113.Контроллер включает в себя полевой транзистор 123 для управления протеканием электрического тока через комбинацию якоря 119 двигателя, селекторного переключателя 124 вперед-нейтраль-реверс и обмотку возбуждения 125.
Обратный диод 126 в регуляторе скорости двигателя 118 сглаживает импульсы электрического тока в якоре двигателя 119, селекторном переключателе 124 прямого/нейтрального/обратного хода и обмотке возбуждения 125.
Контроллер 118 скорости двигателя дополнительно включает в себя диод 127 для обеспечения пути для электрического тока короткого замыкания якоря 119 двигателя всякий раз, когда селекторный переключатель 124 вперед-нейтраль-реверс приводится в действие для изменения направления электрического тока, протекающего через поле. обмотка 125 для торможения штекером при вращении якоря 119 двигателя.
Схема 116 активации включает контактор 115 основного питания, расположенный между батареей 113 и регулятором 118 скорости двигателя, для замыкания электрической цепи между батареей 113 и регулятором 118 скорости двигателя, когда на катушку 114 подается питание. Катушка 114 соединена последовательно с концевым выключателем 112 выбора направления и переключателем 111 с ключом, причем катушка 114 питается от батареи 113, когда концевой выключатель 112 и переключатель 111 с ключом замкнуты.
Цепь 122 дроссельной заслонки соединена со схемой 116 активации с помощью переключателя положения дроссельной заслонки 121.Реостат 122А положения дроссельной заслонки подключен между переключателем 121 положения дроссельной заслонки и регулятором 118 скорости двигателя для подачи сигнала положения дроссельной заслонки на регулятор 118 скорости двигателя, при этом сигнал положения дроссельной заслонки указывает требуемую скорость двигателя.
Во время работы ключевой выключатель 111 и концевой выключатель 112 селектора направления замкнуты, чтобы замкнуть электрическую цепь от аккумулятора 113 до катушки 114, чтобы замкнуть главный силовой контактор 115.
Замыкание главного силового контактора 115 замыкает электрическую цепь от батареи 113 до регулятора скорости двигателя 118 и до электродвигателя постоянного тока с последовательной обмоткой 120.
Концевой выключатель 121 положения дроссельной заслонки замкнут, чтобы замкнуть электрическую цепь от аккумулятора 113 до реостата 122A положения дроссельной заслонки, чтобы подать сигнал положения дроссельной заслонки на регулятор 118 скорости двигателя.
При желании электрическое торможение достигается путем реверсирования селекторного переключателя 124 вперед-нейтраль-реверс, тем самым реверсируя поток электрического тока в обмотке возбуждения 125. Это приводит к торможению плунжера, когда якорь 119 все еще вращается.
Обратимся теперь к фиг.2 показана схема системы 210 электродвигателя в обесточенном состоянии, которая сконструирована в соответствии с настоящим изобретением.
Двигательная система 210 обычно включает в себя электродвигатель 220 постоянного тока, регулятор 218 скорости двигателя, соединенный с двигателем 220 для возбуждения двигателя 220, схему 216 активации, соединенную с регулятором скорости двигателя 218, для управления подачей электроэнергии на двигатель. 220 через контроллер 218 скорости двигателя и аккумулятор 213 для подачи электроэнергии постоянного тока на двигатель 220.Двигательная система 210 дополнительно включает дроссельную схему 222, подключенную между схемой 216 активации и регулятором 218 скорости двигателя для изменения скорости двигателя 220 и установления минимальных уровней электрического тока, и модуль 238 управления для модуляции тока обмотки возбуждения.
Теперь, рассматривая двигатель более подробно, двигатель 220 включает якорь 219 двигателя, соединенный параллельно с обмоткой возбуждения 225 двигателя, имеющей 120 витков на полюс в узле 220А. К обмотке возбуждения 225 присоединен переключатель 224 «вперед-нейтраль-реверс», позволяющий изменять полярность обмотки возбуждения 225.
Регулятор скорости двигателя 218 представляет собой обычный регулятор скорости двигателя постоянного тока, модель № 1204-301, производимый компанией Curtis PMC из Дублина, Калифорния.
Если рассмотреть теперь регулятор 218 скорости двигателя более подробно, то регулятор 218 скорости двигателя аналогичен регулятору 118 скорости двигателя и подключен между схемой 216 активации и узлом 220A, а также между аккумулятором 213 и якорем 219. Проводник 234 соединяет контроллер 218 скорости двигателя к якорю 219 для обеспечения пути электрического тока.Контроллер 218 включает в себя полевой транзистор 223 для управления потоком электрического тока через якорь 219 двигателя. Безынерционный диод 226 внутри регулятора 218 скорости двигателя, подключенный между транзистором 223 и узлом 220А, действует на сглаживает импульсы электрического тока в якоре 219, а также обеспечивает путь для электрического тока короткого замыкания якоря 219 двигателя всякий раз, когда селекторный переключатель вперед-нейтраль-реверс 224 приводится в действие для изменения направления электрического тока, протекающего через поле двигателя. обмотка 225 для торможения штекером при вращении якоря 219 двигателя.
Если рассмотреть схему 216 активации более подробно, то схема 216 активации аналогична схеме 116 активации и включает контактор 215 основного питания, подключенный между аккумулятором 213 и регулятором скорости двигателя 218 для замыкания электрической цепи между аккумулятором 213 и контроллер 218 скорости двигателя, когда на катушку 214 подается питание. Катушка 214 соединена последовательно с концевым выключателем 212 селектора направления и выключателем 211, при этом катушка 214 питается от батареи 213, когда концевой выключатель 212 и ключевой выключатель 211 замкнуты.
Если рассмотреть схему 222 дроссельной заслонки более подробно, то цепь 222 дроссельной заслонки соединена со схемой 216 активации с помощью переключателя 221 положения дроссельной заслонки. Реостат 222A положения дроссельной заслонки подключен между переключателем 221 положения дроссельной заслонки и регулятором 218 скорости двигателя для обеспечения сигнал положения дроссельной заслонки на контроллер 218 скорости двигателя, при этом сигнал положения дроссельной заслонки указывает требуемую скорость двигателя.
Катушка 228 соединена со стороной переключателя положения дроссельной заслонки реостата 222A положения дроссельной заслонки и питается от батареи 213, когда переключатель 221 положения дроссельной заслонки замкнут.Катушка 228 взаимодействует с реле 229 для альтернативного подключения батареи 213 к модулю управления 238. В обесточенном состоянии катушка 228 размыкает реле 229, посредством чего модуль управления 238 подключается к батарее 213 через ответвление 241 через диод 240. В состоянии питания катушка 228 заставляет реле 229 подключать модуль управления 238 к батарее 213 в узле 233 через диод 232.
Если теперь рассмотреть модуль управления 238 более подробно, то модуль управления 238 включает вторичную обмотку управления 230, намотанную на 15 витков вокруг ферромагнитного сердечника 231, имеющего воздушный зазор 237.Ферромагнитный сердечник 231 окружает проводник 234 и электромагнитно взаимодействует с ним. Конец вторичной обмотки 230 управления соединен с обмоткой возбуждения 225 двигателя, а другой конец соединен с другим полевым транзистором 239 для облегчения протекания электрического тока через обмотку возбуждения 225. Безынерционный диод 242 подключен между узлом 220А и управляющей обмоткой. модуль 238 для сглаживания переходов электрического тока в обмотке возбуждения 225.
Модуль управления 238 — это обычный модуль управления, модель №.200 A HAL производства LEM U.S.A., Inc., Милуоки, Висконсин, причем этот модуль был модифицирован для облегчения его использования с настоящим изобретением. В связи с этим штатный полевой транзистор модели №200 А HAL заменен на аналогичный полевой транзистор 239, имеющий номинал 12 ампер. Кроме того, стандартная вторичная обмотка управления модели № 200 A HAL была заменена вторичной обмоткой управления 23, имеющей 15 витков, чтобы обеспечить соотношение витков 15:1.
Модуль 238 управления дополнительно содержит датчик 235 магнитного потока на эффекте Холла, соединенный с датчиком 236 поперечного магнитного потока, при этом датчик 235 магнитного потока на эффекте Холла расположен внутри воздушного зазора 237 для определения величины и направления магнитного потока. пересекает воздушный зазор 237. Датчик 236 поперечного магнитного потока соединен с полевым транзистором 239 с помощью внутренней схемы для активации или деактивации полевого транзистора 239 в соответствии с направлением магнитного потока, пересекающего воздушный зазор 237.
Во время работы ключевой выключатель 211 и концевой выключатель 212 селектора направления замкнуты, чтобы замкнуть электрическую цепь от аккумулятора 213 для замыкания главного силового контактора 215.
Замыкание главного силового контактора 215 замыкает электрическую цепь от аккумулятора 213 до регулятора скорости двигателя 218 и до электродвигателя постоянного тока 220.
Концевой выключатель 221 положения дроссельной заслонки замкнут, чтобы замкнуть электрическую цепь от аккумулятора 213 до реостата 222A положения дроссельной заслонки, чтобы подать сигнал положения дроссельной заслонки на регулятор 218 скорости двигателя.
При замыкании концевого выключателя дроссельной заслонки 221 на катушку 228 реле 229 подается питание. Замыкание реле 229 соединяет электрическую цепь, содержащую обмотку 225 возбуждения двигателя и вторичную обмотку 230 управления, с диодом 232 и отводом 233 на аккумуляторе 213, таким образом устанавливая минимальную величину электрического тока в обмотке 225 возбуждения двигателя, которая не зависит от работы полевого транзистора 239 в модуле управления 238.
При размыкании концевого выключателя 221 дроссельной заслонки катушка реле 228 обесточивается, в результате чего реле 229 подключает цепь, содержащую обмотку возбуждения 225 двигателя, к диоду 240 и ответвлению 241 на аккумуляторе 213.Подключение к отводу 241 на аккумуляторе 213 увеличивает величину минимального напряжения, подаваемого на цепь, содержащую обмотку возбуждения 225 двигателя, увеличивая напряженность поля в ампер-витках обмотки возбуждения 225 двигателя и уменьшая величину скорости вращения, при которой двигатель 220 развивает отрицательный тормозящий момент, рекуперируя электроэнергию в батарею 213.
Замыкание главного силового контактора 215 позволяет протекать электрическому току от якоря 219 двигателя через электрический проводник 234 к полевому транзистору 223 в регуляторе скорости двигателя 218, создавая магнитное поле в ферромагнитном сердечнике 231, окружающем электрический проводник 234.Датчик 236 потока пересечения магнитного потока определяет направление магнитного потока в воздушном зазоре 237 в ферромагнитном сердечнике 231 и управляет полевым транзистором 239, включая его, вызывая протекание электрического тока через обмотку возбуждения 225 и через вторичную обмотку управления 230 и полевой транзистор 239 обратно к аккумулятору 213.
Вторичная обмотка управления 230 расположена на ферромагнитном сердечнике 231 таким образом, что протекание электрического тока от обмотки возбуждения двигателя 225 через вторичную обмотку управления 230 к полевому транзистору 239 создает магнитное поле в ферромагнитном сердечнике. сердечник 231 в направлении, противоположном магнитному полю, установленному в ферромагнитном сердечнике 231, за счет протекания электрического тока от якоря 219 двигателя через электрический проводник 234 к полевому транзистору 223 в регуляторе скорости двигателя 218.
Напряженность магнитного поля в ампер-витках, создаваемая протеканием электрического тока во вторичной обмотке управления 230, определяется величиной электрического тока, протекающего в электрической цепи, содержащей обмотку возбуждения двигателя 225 и вторичную обмотку управления 230.
Когда напряжённость магнитного поля, установленного в ферромагнитном сердечнике 231 протеканием электрического тока во вторичной обмотке управления 230, превышает ампер-витковую напряжённость магнитного поля, установленного в ферромагнитном сердечнике 231 протеканием электрического тока. ток в электрическом проводнике 234, течение магнитного потока в воздушном зазоре 237 меняется на противоположное.Датчик 236 потока пересечения магнитного потока определяет, что направление магнитного потока в воздушном зазоре 237 изменилось на противоположное, и вызывает выключение полевого транзистора 239, тем самым прекращая протекание электрического тока через обмотку возбуждения 225. и через вторичную обмотку управления 231. В результате направление магнитного потока в воздушном зазоре 237 меняется на противоположное, и датчик поперечного магнитного потока вызывает повторное включение полевого транзистора 239.
Эффект вышеизложенного заключается в том, что полевой транзистор 239 включается и выключается, а затем снова включается в повторяющемся цикле, поскольку поток магнитного потока меняет направление на противоположное каждый раз, когда полевой транзистор 239 включается. или выкл.Обратный диод 242 сглаживает импульсы тока в электрической цепи, содержащей обмотку возбуждения 225 двигателя и вторичную обмотку управления 230. Благодаря циклу включения-выключения полевого транзистора 239 поток магнитного потока в воздушный зазор 237 по существу поддерживается близким к нулю, а напряженность магнитного поля в ампер-витках, установленная в ферромагнитном сердечнике 231 за счет протекания электрического тока во вторичной обмотке 230 управления, модулируется так, чтобы быть по существу равной напряженности магнитного поля в ампер-витках, установленной в ферромагнитном сердечнике 231 за счет протекания электрического тока в электрическом проводнике 234.
Когда напряженность магнитного поля в ампер-витках, установленная в ферромагнитном сердечнике 231 вторичной обмоткой управления 230, поддерживается по существу равной напряженности магнитного поля в ампер-витках, установленной электрическим проводником 234 в ферромагнитном сердечнике 231, отношение величины величины электрического тока в электрической цепи обмотки возбуждения 225 двигателя к величине электрического тока в электрической цепи якоря двигателя 219 определяется отношением числа витков вторичной обмотки управления 230 на ферромагнитном сердечнике 231 к количеству витков электрического проводника 234 через ферромагнитный сердечник 231, что фактически равно одному витку.
Вторичная обмотка управления 230 имеет 15 витков, поэтому сила двух магнитных полей в ампер-витках в ферромагнитном сердечнике практически одинакова, когда величина электрического тока во вторичной обмотке управления 230 составляет 1/15 величины электрический ток в электрическом проводнике 234.
Результатом взаимодействия на датчике Холла 237 и датчике поперечного магнитного потока 236 сравнительных величин электрического тока в электрическом проводнике 234 и электрического тока во вторичной обмотке управления 230 является то, что величина электрического тока в обмотке возбуждения 225 двигателя поддерживают по существу равным 1/15 величины электрического тока в якоре 219 двигателя, а напряженность поля в ампер-витках обмотки возбуждения 225 двигателя поддерживают по существу на фиксированном уровне. коэффициент величины электрического тока в якоре двигателя 219.
Обратимся теперь к фиг. 3 кривая «Ампер-витки поля» показывает соотношение между ампер-витками поля на полюс и током якоря в обычном электродвигателе с последовательной обмоткой, таком как показано на фиг. 1, с полем 8 витков на полюс. Точно так же это соотношение справедливо для двигателя 220, показанного на фиг. 2 с обмоткой возбуждения со 120 витками на полюс, когда величина электрического тока в обмотке возбуждения 225 поддерживается на уровне 1/15 величины электрического тока в якоре 219 двигателя.
Кривая «Скорость» показывает взаимосвязь между скоростью вращения якоря двигателя и током якоря в обычном электродвигателе 120 с последовательной обмоткой, показанном на фиг. 1 с полем 8 витков на полюс. Точно так же это соотношение справедливо для двигателя 220, показанного на фиг. 2 с обмоткой возбуждения 120 витков на полюс при величине электрического тока в обмотке возбуждения 225, поддерживаемой на уровне 1/15 величины электрического тока в якоре двигателя 219.
Обратимся теперь к фиг.4 кривая «Ампер-витки поля» показывает соотношение между ампер-витками поля на полюс и током якоря электродвигателя 220 по фиг. 2, а кривая «Скорость» показывает зависимость между скоростью вращения двигателя и током якоря электродвигателя 220, когда реле 229 подключает цепь, содержащую обмотку возбуждения 225 электродвигателя 220, к отводу 233 на аккумуляторной батарее. 213, тем самым устанавливая минимальную величину электрического тока в обмотке электромагнитного поля 225.
Кривая «Ампер-витки поля» показывает, что величина поля ампер-витков в поле двигателя 225 в двигателе 220 существенно не уменьшится ниже минимальной величины, установленной уровнем напряжения на отводе 233 аккумулятора 213. Кривая «Скорость» показывает, что скорость вращения двигателя 220 не будет существенно увеличиваться по сравнению с максимальной скоростью, определяемой уровнем напряжения на отводе 233 на аккумуляторе 213. Любое увеличение скорости вращения двигателя 220 выше максимальной скорости двигателя скорость, определяемая уровнем напряжения на отводе 233 на аккумуляторе 213, приводит к тому, что внутреннее генерируемое напряжение в якоре 219 двигателя превышает величину приложенного напряжения от аккумулятора 213, и двигатель 220 развивает отрицательный или замедляющий крутящий момент, генерируя рекуперативную электроэнергию обратно в батарею 213.
Обратимся теперь к фиг. 5 показан график, иллюстрирующий взаимосвязь «Ампер-витков поля» и «Скорости» с током якоря в двигателе 220, показанном на ФИГ. 2 всякий раз, когда концевой выключатель 221 дроссельной заслонки отпускается, когда главный контактор 215 замкнут, замыкая электрическую цепь через селекторный переключатель 224 вперед-нейтраль-реверс, обмотку 225 возбуждения двигателя, вторичные обмотки управления 230, реле 229 и диод 240 к отводу 241 на аккумулятор 213.
Обратимся теперь к фиг.6 показана другая система 610 электродвигателя в обесточенном состоянии, которая также сконструирована в соответствии с настоящим изобретением.
Двигательная система 610 обычно включает в себя электродвигатель 620 постоянного тока, регулятор 618 скорости двигателя, соединенный с двигателем 620 для возбуждения двигателя 620, схему 616 активации, соединенную с регулятором 618 скорости двигателя, для управления подачей электроэнергии на двигатель. 620 через контроллер 618 скорости двигателя и аккумулятор 613 для подачи электроэнергии постоянного тока на двигатель 620.Двигательная система 610 дополнительно включает дроссельную схему 622, подключенную между схемой 616 активации и регулятором 618 скорости двигателя для изменения скорости двигателя 620, и тормозную схему 645 для изменения скорости вращения двигателя 620.
Теперь при более подробном рассмотрении двигателя 620 двигатель 620 включает в себя якорь 619 двигателя, соединенный параллельно с обмоткой 625 возбуждения двигателя, имеющей 120 витков на полюс в узле 620А. К обмотке возбуждения 625 присоединен переключатель прямого-нейтрального-обратного хода 624, позволяющий изменять полярность обмотки возбуждения 625.
Регулятор скорости двигателя 618 представляет собой обычный регулятор скорости двигателя постоянного тока, модель № 1204-301, производимый компанией Curtis PMC из Дублина, Калифорния.
Теперь, рассматривая регулятор 618 скорости двигателя более подробно, регулятор 618 скорости двигателя аналогичен регулятору 218 скорости двигателя и подключен между схемой 616 активации и узлом 620A, а также между батареей 613 и якорем 619. Проводник 634 соединяет контроллер 618 скорости двигателя к якорю 619, чтобы обеспечить путь электрического тока между ними.Контроллер 618 скорости двигателя включает в себя полевой транзистор 623 для управления потоком электрического тока через якорь 619 двигателя. Обратный диод 626, включенный между транзистором 623 и узлом 620А, действует для сглаживания импульсов электрического тока в якоря 619, а также обеспечивает путь для электрического тока короткого замыкания якоря 619 двигателя всякий раз, когда селекторный переключатель 624 вперед-нейтраль-реверс приводится в действие для изменения направления электрического тока, протекающего через обмотку возбуждения 625 двигателя для торможения штекером. в то время как якорь 619 двигателя все еще вращается.
Если рассмотреть схему 616 активации более подробно, то схема 616 активации аналогична схеме 216 активации и включает контактор 615 основного питания, подключенный между аккумулятором 613 и регулятором 618 скорости двигателя для замыкания электрической цепи между аккумулятором 613 и контроллер 618 скорости двигателя, когда на катушку 614 подается питание. Катушка 614 соединена последовательно с концевым переключателем 612 выбора направления и переключателем с ключом 611, при этом катушка 614 питается от батареи 613, когда концевой переключатель 612 и переключатель с ключом 611 замкнуты.
Если рассмотреть схему 622 дроссельной заслонки более подробно, то схема 622 дроссельной заслонки соединена со схемой 616 активации с помощью переключателя 621 положения дроссельной заслонки. Реостат 622А положения дроссельной заслонки подключен между переключателем 621 положения дроссельной заслонки и регулятором 618 скорости двигателя для обеспечения сигнал положения дроссельной заслонки на контроллер 618 скорости двигателя, при этом сигнал положения дроссельной заслонки указывает требуемую скорость двигателя.
Если теперь рассмотреть модуль управления 638 более подробно, модуль управления 638 включает в себя вторичную обмотку управления 630, намотанную на 15 витков вокруг ферромагнитного сердечника 631, имеющего воздушный зазор 637.Ферромагнитный сердечник 631 окружает проводник 634 и электромагнитно взаимодействует с ним. Конец вторичной обмотки 630 управления соединен с обмоткой возбуждения 625 двигателя, а другой конец соединен с другим полевым транзистором 639 для облегчения протекания электрического тока через обмотку возбуждения 625. Безынерционный диод 642 подключен между узлом 220А и управляющим элементом. модуль 638 для сглаживания переходов электрического тока в обмотке возбуждения 625.
Модуль управления 638 — это обычный модуль управления, модель №.200 A HAL-X производства LEM U.S.A., Inc., Милуоки, Висконсин, этот модуль был модифицирован для облегчения его использования в настоящем изобретении. В связи с этим стандартный полевой транзистор модели №200 А HAL-X заменен на аналогичный полевой транзистор 639, имеющий номинал 12 ампер. Кроме того, стандартная вторичная обмотка управления модели № 200 A HAL-X была заменена вторичной обмоткой управления 23, имеющей 15 витков, чтобы обеспечить соотношение витков 15:1.
Модуль 638 управления дополнительно содержит датчик 635 магнитного потока на эффекте Холла, соединенный с датчиком 636 поперечного магнитного потока, при этом датчик 635 магнитного потока на эффекте Холла расположен внутри воздушного зазора 637 для определения величины и направления магнитного потока. — пересечение воздушного зазора 637. Датчик 636 потока пересечения магнитного потока соединен с полевым транзистором 639 с помощью внутренней схемы (не показана) для активации или деактивации полевого транзистора 639 в соответствии с направлением магнитного потока, пересекающего воздушный зазор. 637.
Теперь, рассматривая тормозную цепь 645 более подробно, тормозная цепь 645 включает в себя реостат 644 положения тормоза, подключенный к модулю 638 управления на клемме 629, и концевой выключатель 643 тормоза для включения реостата положения тормоза 644 для изменения скорости вращения, при которой двигатель 620 развивает рекуперативное торможение.
Во время работы ключевой выключатель 611 и концевой выключатель 612 селектора направления замкнуты, чтобы замкнуть электрическую цепь от батареи 613 для замыкания контактора 615 основного питания.
Замыкание главного силового контактора 615 замыкает электрическую цепь от аккумулятора 613 до регулятора скорости двигателя 618 и до электродвигателя постоянного тока 620.
Концевой выключатель 621 положения дроссельной заслонки замкнут, чтобы замкнуть электрическую цепь от аккумулятора 613 до реостата 622A положения дроссельной заслонки, чтобы подать сигнал положения дроссельной заслонки на регулятор 618 скорости двигателя.
При замыкании концевого выключателя 612 селектора направления на клемму 628 модуля управления 638 подается питание.Заданная минимальная величина электрического тока в цепи, содержащей обмотку 625 возбуждения двигателя и вторичную обмотку 630 управления, устанавливается в модуле 638 управления всякий раз, когда главный контактор 615 замкнут, тем самым устанавливая минимальную величину напряженности поля в ампер-витках в обмотка возбуждения двигателя 625 двигателя 620.
При замыкании концевого выключателя тормоза 643 на реостат 644 положения тормоза подается сигнал положения тормоза на клемму 629 модуля управления 638.Модуль 638 управления реагирует на переменный сигнал положения тормоза, изменяя величину электрического тока в цепи, содержащей обмотку 625 возбуждения двигателя и вторичную обмотку 630 управления, тем самым устанавливая переменную величину напряженности поля в ампер-витках в поле двигателя. обмотка 625 двигателя 620 для изменения величины скорости вращения, при которой двигатель 620 развивает отрицательный тормозящий момент, рекуперируя электроэнергию в батарею 613.
Замыкание главного силового контактора 615 обеспечивает протекание электрического тока от якоря 619 двигателя через электрический проводник 634 к полевому транзистору 623 в регуляторе скорости двигателя 618, создавая магнитное поле в ферромагнитном сердечнике 631, окружающем электрический проводник 634.Датчик 636 потока пересечения магнитного потока определяет направление магнитного потока в воздушном зазоре 637 в ферромагнитном сердечнике 631 и управляет полевым транзистором 639, включая его, вызывая протекание электрического тока через обмотку возбуждения 625 и через вторичную обмотку управления 630 и полевой транзистор 639 обратно к аккумулятору 613.
Вторичная обмотка управления 630 расположена на ферромагнитном сердечнике 631 таким образом, что протекание электрического тока от обмотки возбуждения двигателя 625 через вторичную обмотку управления 630 к полевому транзистору 639 создает магнитное поле в ферромагнитном сердечнике. сердечник 631 в направлении, противоположном магнитному полю, установленному в ферромагнитном сердечнике 631, за счет протекания электрического тока от якоря 619 двигателя через электрический проводник 634 к полевому транзистору 623 в регуляторе скорости двигателя 618.
Напряженность магнитного поля в ампер-витках, создаваемая протеканием электрического тока во вторичной обмотке управления 630, определяется величиной электрического тока, протекающего в электрической цепи, содержащей обмотку возбуждения двигателя 625 и вторичную обмотку управления 630.
Когда сила магнитного поля, установленная в ферромагнитном сердечнике 631 протеканием электрического тока во вторичной обмотке управления 630, превышает ампер-витковую напряженность магнитного поля, установленного в ферромагнитном сердечнике 631 протеканием электрического тока. ток в электрическом проводнике 634, течение магнитного потока в воздушном зазоре 637 меняется на противоположное.Датчик 636 потока пересечения магнитного потока определяет, что направление магнитного потока в воздушном зазоре 637 изменилось на противоположное, и вызывает выключение полевого транзистора 639, тем самым прекращая протекание электрического тока через обмотку возбуждения 625. и через вторичную обмотку управления 631. В результате поток магнитного потока в воздушном зазоре 637 меняется на противоположный, и датчик 636 потока пересечения магнитного потока заставляет полевой транзистор 639 снова включаться.
Эффект вышеизложенного заключается в том, что полевой транзистор 639 включается и выключается, а затем снова включается в повторяющемся цикле, поскольку поток магнитного потока меняет направление на противоположное каждый раз, когда полевой транзистор 639 включается. или выкл.Обратный диод 642 сглаживает импульсы тока в электрическом токе, содержащем обмотку 625 возбуждения двигателя и вторичную обмотку 630 управления. Благодаря циклу включения-выключения полевого транзистора 639 поток магнитного потока в воздушный зазор 637 по существу поддерживается близким к нулю, а напряженность магнитного поля в ампер-витках, установленная в ферромагнитном сердечнике 631 за счет протекания электрического тока во вторичной обмотке 630 управления, модулируется так, чтобы быть по существу равной напряженности магнитного поля в ампер-витках, установленной в ферромагнитном сердечнике 631 за счет протекания электрического тока в электрическом проводнике 634.
Когда напряженность магнитного поля в ампер-витках, создаваемая в ферромагнитном сердечнике 631 вторичной обмоткой 630 управления, по существу равна напряженности магнитного поля в ампер-витках, создаваемой электрическим проводником 634 в ферромагнитном сердечнике 631, отношение величины величина электрического тока в электрической цепи обмотки возбуждения 625 двигателя к величине электрического тока в электрической цепи якоря 619 двигателя определяется отношением числа витков вторичной обмотки управления 630 на ферромагнитном сердечнике 631 к количеству витков электрического проводника 634 через ферромагнитный сердечник 631, что фактически равно одному витку.
Вторичная обмотка управления 630 имеет 15 витков, поэтому сила двух магнитных полей в ампер-витках в ферромагнитном сердечнике практически одинакова, когда величина электрического тока во вторичной обмотке управления 630 составляет 1/15 величины электрический ток в электрическом проводнике 634.
Результатом взаимодействия на датчике Холла 637 и датчике поперечного магнитного потока 636 сравнительных величин электрического тока в электрическом проводнике 634 и электрического тока во вторичной обмотке управления 630 является то, что величина электрического тока в обмотке 625 возбуждения двигателя поддерживают по существу равным 1/15 величины электрического тока в якоре 619 двигателя, а напряженность поля в ампер-витках обмотки 625 возбуждения двигателя поддерживают по существу на фиксированном уровне. отношение величины электрического тока в якоре двигателя 619.
Снова обратимся к фиг. 3 кривая «Ампер-витки поля» показывает соотношение между ампер-витками поля на полюс и током якоря в обычном электродвигателе с последовательной обмоткой, таком как показано на фиг. 1, с полем 8 витков на полюс. Точно так же это соотношение справедливо для двигателя 620, показанного на фиг. 6, имеющую обмотку возбуждения со 120 витками на полюс, когда величина электрического тока в обмотке возбуждения 625 поддерживается на уровне 1/15 величины электрического тока в якоре 619 двигателя.
Кроме того, кривая «Скорость» показывает взаимосвязь между скоростью вращения якоря двигателя и током якоря в обычном электродвигателе 120 с последовательной обмоткой, показанном на фиг. 1, с полем 8 витков на полюс. Это же соотношение справедливо и для двигателя 620, показанного на фиг. 6, имеющую обмотку возбуждения со 120 витками на полюс, когда величина электрического тока в обмотке возбуждения 625 поддерживается на уровне 1/15 величины электрического тока в якоре 619 двигателя.
Снова обратимся к фиг. 4 кривая «Ампер-витки поля» показывает соотношение между ампер-витками возбуждения на полюс и током якоря электродвигателя 620 по фиг. 6, а кривая «Скорость» показывает взаимосвязь между скоростью вращения двигателя и током якоря электродвигателя 620, когда на клемму 628 модуля управления 638 подается питание посредством замыкания концевого выключателя 621 дроссельной заслонки для установления заданного минимума. величина электрического тока в цепи, содержащей обмотку возбуждения 625 двигателя и вторичную обмотку управления 630.В результате устанавливается минимальная величина напряженности поля в ампер-витках в обмотке 625 возбуждения двигателя.
Несмотря на то, что были раскрыты конкретные варианты осуществления настоящего изобретения, следует понимать, что возможны различные модификации, которые рассматриваются в рамках истинной сущности и объема прилагаемой формулы изобретения. Таким образом, нет никаких намерений ограничивать точный реферат или раскрытие, представленное здесь.