
КПД электродвигателей | Полезные статьи
Электрическими двигателями переменного или постоянного тока комплектуются приводы станков, насосов и вентиляторов, а также других механизмов, используемых на предприятиях тяжелой и легкой промышленности. Рентабельность производства напрямую зависит от себестоимости продукции, на которую в большой степени влияет эффективность эксплуатации оборудования, поэтому КПД и мощность электродвигателя являются основными параметрами, на основании которых выполняется подбор привода.
Определение КПД электродвигателя
Принцип работы любой электрической машины основан на преобразовании энергии тока, протекающего по обмоткам статора и создающего магнитное поле, во вращение ротора. Коэффициент полезного действия (КПД) электродвигателя определяется соотношением вырабатываемой им механической мощности на валу (p2) к полной мощности, потребляемой из сети (p1) и выражается в процентах:
η=p2/p1*100%
Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.
Факторы, влияющие на величину КПД
Коэффициент полезного действия никогда не может быть равным единице, так как существуют неизбежные потери, снижающие полезную мощность. Они делятся на три группы:
- электрические;
- магнитные;
- механические.
Электрические потери зависят от степени нагрузки двигателя и являются следствием нагрева обмоток статора, вызванного работой тока по преодолению электрического сопротивления проводников, из которых они выполнены. Поэтому максимальный КПД электродвигателя достигается, когда нагрузка на двигатель составляет 75% от максимальной расчетной величины.
Магнитные потери происходят из-за неизбежного перемагничивания активного железа статора и ротора, а также возникновения в нем вихревых токов.
Третья группа обусловлена наличием трения в подшипниках, на которых вращается вал, а также сопротивлением, оказываемым воздухом крыльчатке вентилятора и самому ротору (якорю).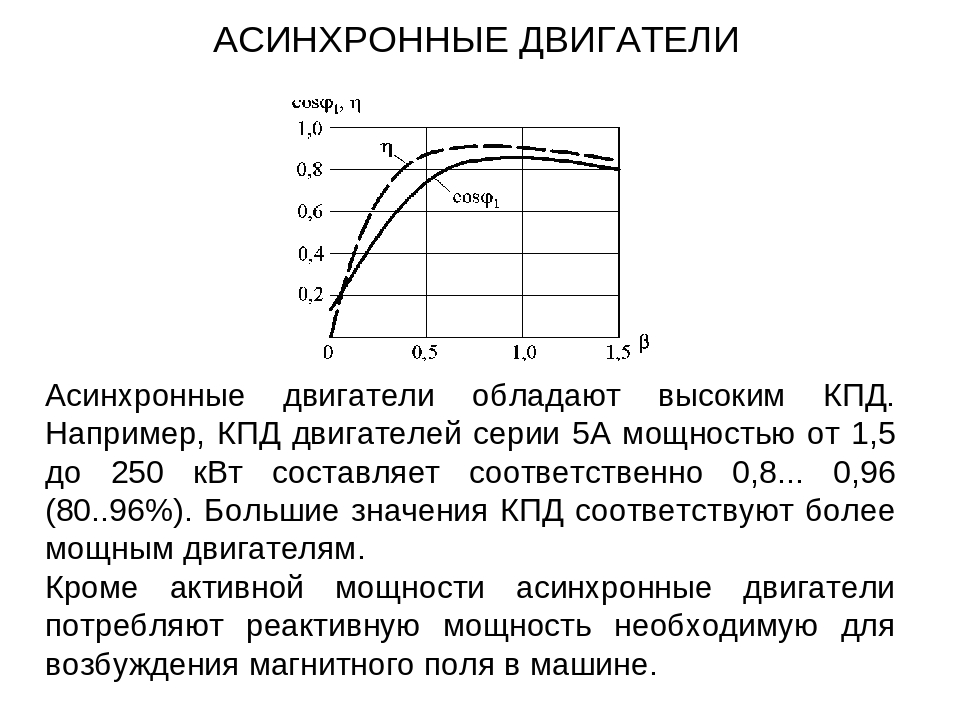 Из-за наличия щеточно-коллекторного узла КПД электродвигателя постоянного тока несколько ниже коэффициента полезного действия машин с короткозамкнутым ротором. Это также относится к асинхронным электродвигателям с фазным ротором из-за дополнительного трения щеток об контактные кольца.
Из-за наличия щеточно-коллекторного узла КПД электродвигателя постоянного тока несколько ниже коэффициента полезного действия машин с короткозамкнутым ротором. Это также относится к асинхронным электродвигателям с фазным ротором из-за дополнительного трения щеток об контактные кольца.
Способы повысить КПД двигателя
Следует помнить, что реальный коэффициент полезного действия может несколько отличатся от паспортных величин, указанных на шильдике двигателя. Чтобы выполнить расчет КПД электродвигателя в реальных условиях эксплуатации, необходимо учитывать неравномерность распределения питающего напряжения в фазах. В зависимости от величины асимметрии падение полезной мощности может достигать 5-7%.
Увеличение КПД электрической машины возможно только за счет снижения потерь и контроля качества силовой сети.
Механические потери можно уменьшить благодаря более качественным подшипникам, установки крыльчатки вентилятора, выполненной из современных материалов для уменьшения сопротивлению воздуху. Нагрев обмоток можно уменьшить благодаря использованию обмоточных проводов, выполненных из очищенной меди, имеющих меньшее сопротивление.
Нагрев обмоток можно уменьшить благодаря использованию обмоточных проводов, выполненных из очищенной меди, имеющих меньшее сопротивление.
Снизить потери на перемагничивание активного железа и минимизировать влияние вихревых токов можно используя для набора сердечника необходимо использовать качественную электромагнитную сталь с надежной изоляцией. Кроме того, ведутся работы по разработке наилучшей геометрии зубцов статора, благодаря которым будет увеличена концентрация магнитного поля.
В реальности КПД асинхронного электродвигателя можно несколько увеличить за счет использования частотного преобразователя, позволяющего оптимизировать расход электроэнергии. Следует помнить, что эффективность эксплуатации двигателя с КПД 98% сильно упадет, если его использовать для приведения в движения механизма, имеющего более низкий коэффициент полезного действия.
Потери асинхронного двигателя
Работа асинхронного двигателя, как и любой другой машины, сопровождается потерями. Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
КПД асинхронного двигателя, представляет собой отношение полезной мощности на выходе P2 к подводимой двигателю мощности P1, выраженная в процентах
Мощность, подводимая к двигателю
где m – количество фаз, U1 – напряжение на статорной обмотке, I1 – ток в статорной обмотке, cosφ1 – коэффициент мощности двигателя
Полезная мощность на выходе P2, меньше подводимой мощности P1 на величину суммарных потерь ∑P
Потери ∑P складываются из магнитных, электрических и механических потерь
В первую очередь часть подводимой мощности P1 расходуется на покрытие магнитных Pм1 и электрических Pэ1 потерь в статоре
Электрические потери в статоре
где r1 активное сопротивление обмотки статора
Магнитные потери в статоре приблизительно определяются как
где f1 – частота тока перемагничивания, которая равна частоте тока в сети. V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
Мощность, оставшаяся после восполнения потерь в статоре, называется электромагнитной и равна
Электромагнитная мощность передается ротору с помощью магнитного поля, через воздушный зазор δ. Часть электромагнитной мощности затрачивается на электрические потери в роторе, которые пропорциональны скольжению
Отсюда можно получить выражение для скольжения
Не трудно заметить, что с увеличением скольжения электрические потери в роторе также увеличиваются, а это в свою очередь вызывает уменьшение КПД.
В асинхронных двигателях с фазным ротором, присутствуют потери в щеточном узле, которые обычно добавляют к электрическим потерям в роторе
где I2 – ток ротора, Uщ – падение напряжения на пару щеток
Оставшаяся мощность называется механической
Часть механической мощности расходуется на механические и добавочные потери.
К механическим, относятся потери от трения в подшипниках, щетках и вентиляционные.
К добавочным потерям относят все остальные трудно учитываемые потери, которые, как правило, состоят из пульсационных и поверхностных потерь, которые возникают в зубцах ротора и статора. Приблизительное значение добавочных потерь рассчитывается по формуле
Оставшаяся мощность представляет собой полезную мощность на валу двигателя
Рекомендуем к прочтению — Построение механической характеристики асинхронного двигателя
КПД электродвигателя
В электродвигателе при преобразовании электрической энергии в механическую часть энергии теряется в виде тепла, которое сразу рассеивается в различных частях электродвигателя и частично – в окружающей среде. Все потери делятся на три вида: механические, обмоточные и потери в стали. Существуют еще и добавочные потери.
Расчет потерь в электродвигателе
- Для расчета потерь в электродвигателе используют специальные формулы.
 Часть мощности, которая подается к статору из электросети, передается на ротор через зазор. Рэм – это электромагнитная мощность.
Часть мощности, которая подается к статору из электросети, передается на ротор через зазор. Рэм – это электромагнитная мощность.
 Часть мощности, которая подается к статору из электросети, передается на ротор через зазор. Рэм – это электромагнитная мощность.
Часть мощности, которая подается к статору из электросети, передается на ротор через зазор. Рэм – это электромагнитная мощность.
- Потери мощности непосредственно в статоре – это слагаемое потерь на вихревые токи и на частичное перемагничивание сердечника самого статора. Если рассматривать потери в стали, они настолько незначительные, что редко принимаются во внимание. Объяснить такое можно достаточно просто. Скорость вращения самого статора электродвигателя значительно выше скорости, создаваемой магнитным потоком. Так происходит только в том случае, если скорость вращения ротора полностью соответствует техническим характеристикам электромотора, заявленным производителем.
- Механическая мощность на валу ротора, как правило, меньше мощности Рэм ровно на количество потерь в обмотке. Механические потери в основном приходятся на определенное трение в подшипниках, а также на трение щеток, что характерно для электродвигателей с фазными роторами и на трение вращающихся частей, встречающих воздушную преграду.
- Добавочные потери в асинхронных электродвигателях обусловлены наличием зубчатости статора и ротора, вихревых потоков в разных узлах электродвигателя и иными потерями. При расчете такие потери уменьшают КПД электродвигателя на половину процента от номинальной мощности.
КПД электродвигателя в расчетах
Коэффициент полезного действия (КПД) асинхронного электродвигателя уменьшается на суммарность потерь мощности, которые рассчитываются по формуле. Общая же сумма потерь напрямую зависит от нагрузки электродвигателя. Чем выше нагрузка, тем больше потерь и меньше КПД.
Конструирование асинхронного электродвигателя производится с учетом всех потерь при максимальной нагрузке. Поэтому данный диапазон может быть достаточно широким. Большинство асинхронных электродвигателей имеет коэффициент полезного действия 80-90%. Мощные электродвигатели выпускаются с КПД от 90 до 96%.
Просмотров: 13649
Дата: Воскресенье, 15 Декабрь 2013
7.
 3 Потери и кпд асинхронного двигателя
3 Потери и кпд асинхронного двигателя
Преобразование
электрической энергии в механическую
в двигателе связано с потерями энергии,
поэтому полезная мощность на выходе
двигателя Р2
всегда меньше потребляемой мощности
P1
на величину
потерь
(7.3) |
Потери
разделяются на основные и добавочные.
Основные
потери включают в себя магнитные,
электрические и механические.
Магнитные
потери Pм
в
асинхронном двигателе вызваны потерями
на гистерезис и потерями на вихревые
токи, происходящими в сердечнике ротора
и статора при его перемагничивании.
Величина магнитных потерь пропорциональна
частоте перемагничивания
, | (7.4) |
Частота
перемагничивания сердечника статора
равна f=50
Гц,
соответственно, магнитные потери в
сердечнике статора значительны, а
частота перемагничивания сердечника
ротора при номинальном скольжении
составляет f=50∙s
= (2…4)Гц
и магнитные потери в сердечнике ротора
малы, которые на практике не учитывают.
Электрические
потери
вызваны
нагревом обмоток статора и ротора
проходящими по ним токами:
и , | (7.5) |
где
r1
и r2–
сопротивления обмоток фаз статора и
ротора; m
– число фаз.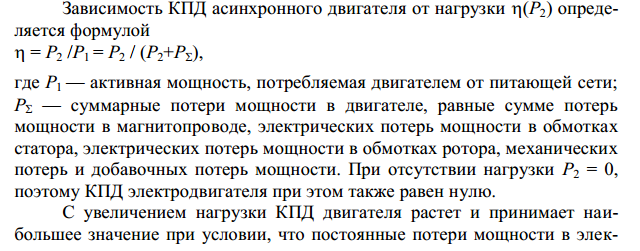
В
асинхронных двигателях с фазным ротором
дополнительно имеются электрические
потери в щеточном контакте.
Механические
потери Рмех
— это потери
на трение в подшипниках и на вентиляцию.
Величина этих потерь пропорциональна
квадрату частоты вращения ротора
(7.6) |
В
двигателях с фазным ротором механические
потери происходят еще и за счет трения
между щетками и контактными кольцами
ротора.
Добавочные
потери
включают в себя все виды трудноучитываемых
потерь, вызванных пульсацией магнитной
индукции в зубцах и другими причинами.
В соответствии с ГОСТом добавочные
потери асинхронных двигателей принимают
равными 0,5% от подводимой к двигателю
мощности Р1.
Таким
образом, часть подводимой к двигателю
мощности затрачивается в статоре на
магнитные РМ
и электрические потери РЭ1.
Оставшаяся электромагнитная мощность
РЭМ
передается на ротор, где расходуется
на электрические потери РЭ2
и преобразуется в полную механическую
мощность. Часть этой мощности идет на
покрытие механических и добавочных
потерь,
а оставшаяся мощность Р2
– полезная
мощность двигателя.
Электрические
потери в обмотках являются переменными
потерями, так как их величина зависит
от нагрузки двигателя, то есть от
значений токов в обмотках статора и
ротора. Переменными являются и добавочные
потери. Магнитные и механические потери
практически не зависят от нагрузки.
Коэффициент
полезного действия асинхронного
двигателя определяется
(7. |
 7)
7) С
изменениями нагрузки КПД меняет свою
величину: в режиме холостого хода КПД
равен нулю, а с ростом нагрузки КПД
увеличивается, достигая максимума при
нагрузке равной (0,7÷0,8)Рном.
КПД
трехфазных асинхронных двигателей
общего назначения при номинальной
нагрузке составляет: для двигателей
мощностью от 1 до 10 кВт η=
75÷88 %, а для двигателей мощностью более
10 кВт η
= 90÷94 %.
Коэффициент
полезного действия один из основных
параметров асинхронного двигателя,
который определяет его энергетические
свойства — экономичность в процессе
эксплуатации. Кроме того, КПД двигателя,
а точнее величина потерь в нем,
регламентирует температуру нагрева
его основных частей и в первую очередь
обмотки статора. По этой причине
двигатели с низким КПД (при одинаковых
условиях охлаждения) работают при более
высокой температуре нагрева обмотки
статора, что ведет к снижению их
надежности и долговечности.
ГОСТ 31605-2012 Машины электрические асинхронные мощностью от 1 до 400 кВт включительно. Двигатели. Показатели энергоэффективности, ГОСТ от 23 ноября 2012 года №31605-2012
ГОСТ 31605-2012
МКС 29.160.30
Дата введения 2015-01-01
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-2009 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены»
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием «Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении» (ВНИИНМАШ)
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 24 мая 2012 г. N 41)
N 41)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Кыргызстан | KG | Кыргызстандарт |
Российская Федерация | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 23 ноября 2012 г.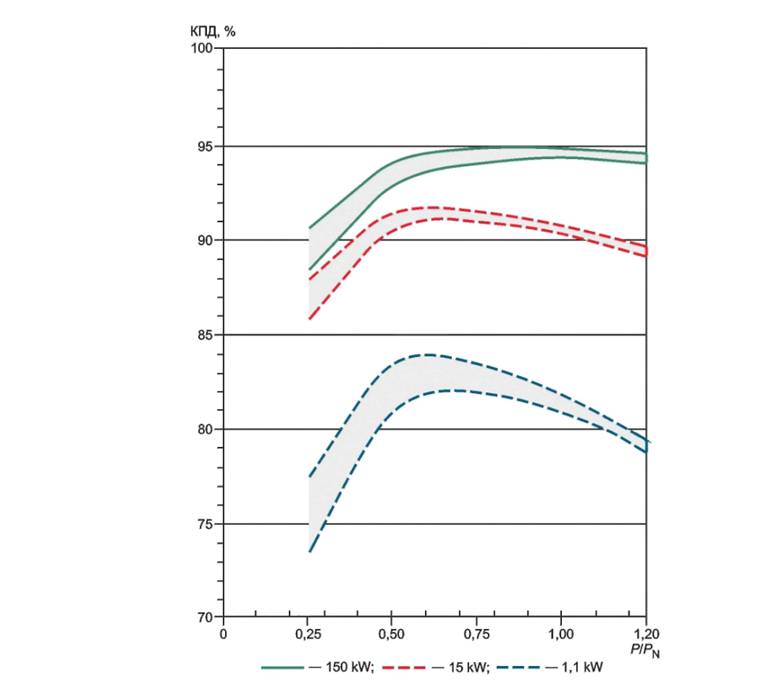 N 1104-ст межгосударственный стандарт ГОСТ 31605-2012 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2015 г.
N 1104-ст межгосударственный стандарт ГОСТ 31605-2012 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2015 г.
5 Стандарт подготовлен на основе применения ГОСТ Р 51677-2000
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в ежемесячно издаваемом информационном указателе «Национальные стандарты».
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок — в ежемесячно издаваемом информационном указателе «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячно издаваемом информационном указателе «Национальные стандарты»
1 Область применения
Настоящий стандарт распространяется на трехфазные асинхронные двигатели с короткозамкнутым ротором общего назначения мощностью от 1 до 400 кВт включительно (далее — двигатели) для работы от сети переменного тока напряжением до 690 В, изготовляемые для нужд народного хозяйства и экспорта.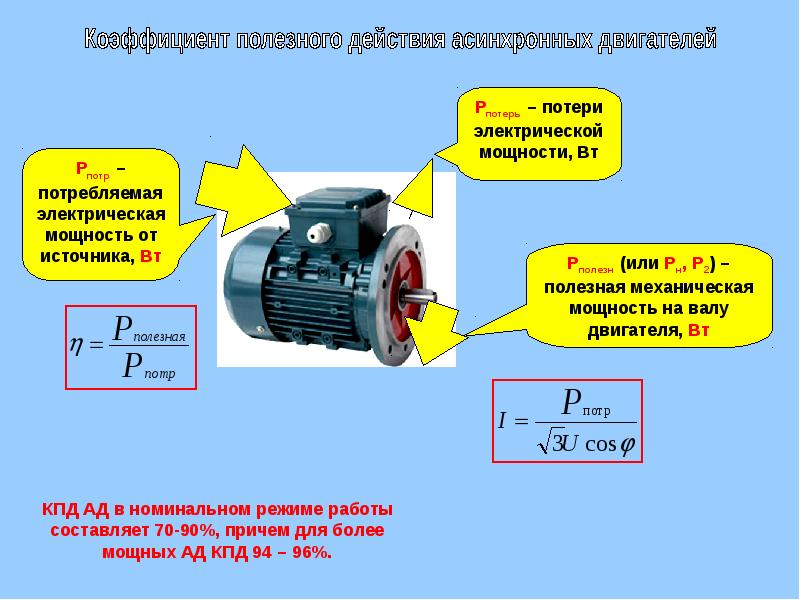
Стандарт не распространяется на специальные двигатели, устанавливаемые на средствах наземного, морского и воздушного транспорта, взрывозащищенные двигатели, а также на двигатели, работающие в нестационарных режимах, многоскоростные двигатели и двигатели с повышенным скольжением.
Стандарт устанавливает уровни показателей энергоэффективности (энергетических показателей): коэффициента полезного действия (КПД) и коэффициента мощности, а также методы их определения.
Требования настоящего стандарта являются обязательными.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 183-74 Машины электрические вращающиеся. Общие технические условия
_______________
На территории Российской Федерации действует ГОСТ Р 52776-2007.
ГОСТ 7217-87 Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний
ГОСТ 28330-89 Машины электрические асинхронные мощностью от 1 до 400 кВт включительно. Двигатели. Общие технические требования
Двигатели. Общие технические требования
_______________
На территории Российской Федерации действует ГОСТ Р 51689-2000.
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов по указателю «Национальные стандарты», составленному по состоянию на 1 января текущего года, и по соответствующим информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом, следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 двигатели с нормальным КПД: Двигатели общепромышленного назначения, КПД которых соответствует уровню, достигнутому в производстве двигателей серии АИ.
3.2 двигатели с повышенным КПД (энергосберегающие двигатели): Двигатели общепромышленного назначения, у которых суммарные потери мощности не менее чем на 20% меньше суммарных потерь мощности двигателей с нормальным КПД той же мощности и частоты вращения.
КПД энергосберегающего двигателя , %, при различных уровнях снижения суммарных потерь определяют по формуле
, (1)
где — коэффициент полезного действия двигателя с нормальным КПД, %;
0,2 — относительное снижение суммарных потерь мощности в двигателе, о.е.
Минимальные значения КПД энергосберегающего двигателя (для случая снижения суммарных потерь мощности в двигателе на 20%, т.е. при 0,2), , %, определяют по формуле
. (2)
4 Основные параметры и размеры
Основные параметры и размеры двигателей — по ГОСТ 28330.
5 Технические требования
5. 1 Показателями энергоэффективности являются:
1 Показателями энергоэффективности являются:
— коэффициент полезного действия, представляющий отношение полезной мощности на валу двигателя, выраженной в киловаттах, к активной мощности, потребляемой двигателем из сети, выраженной в киловаттах;
— коэффициент мощности, представляющий отношение потребляемой активной мощности, выраженной в киловаттах, к полной мощности, потребляемой из сети, выраженной в киловольтамперах.
5.2 В зависимости от требований к уровню энергоэффективности двигатели подразделяют на:
— двигатели с нормальным КПД;
— двигатели с повышенным КПД (энергосберегающие двигатели).
5.3 Двигатели с нормальным КПД мощностью от 1 до 400 кВт включительно должны иметь номинальные значения КПД и коэффициента мощности не ниже указанных в таблицах 1 и 2.
Таблица 1 — Значения КПД двигателей с нормальным КПД
Номинальная мощность, кВт | КПД двигателей, %, при числе полюсов | |||||
2 | 4 | 6 | 8 | 10 | 12 | |
1,10 | 77,0 | 75,0 | 72,0 | 72,0 | — | — |
1,50 | 79,0 | 77,0 | 77,0 | 73,0 | — | — |
2,20 | 82,0 | 78,0 | 80,0 | 75,0 | — | — |
3,00 | 82,0 | 79,0 | 81,0 | 78,0 | — | — |
4,00 | 83,0 | 83,0 | 82,0 | 82,0 | — | — |
5,50 | 86,0 | 84,0 | 84,0 | 83,0 | — | — |
7,50 | 87,0 | 87,0 | 84,5 | 85,0 | — | — |
11,0 | 88,0 | 88,0 | 87,0 | 87,0 | — | — |
15,0 | 89,0 | 89,0 | 88,5 | 88,0 | — | — |
18,5 | 90,0 | 90,0 | 89,0 | 88,5 | — | — |
22,0 | 90,5 | 90,5 | 90,0 | 89,5 | — | — |
30,0 | 91,0 | 91,5 | 90,0 | 90,0 | 88,5 | — |
37,0 | 92,0 | 92,0 | 91,0 | 91,0 | 89,0 | — |
45,0 | 92,5 | 92,5 | 92,0 | 92,0 | 91,0 | 90,5 |
55,0 | 93,0 | 93,0 | 92,5 | 92,0 | 92,0 | 91,0 |
75,0 | 93,0 | 93,5 | 92,5 | 92,5 | 92,0 | 91,5 |
90,0 | 93,0 | 94,0 | 93,0 | 93,0 | 92,5 | 92,0 |
110,0 | 93,5 | 94,0 | 93,0 | 93,0 | 93,0 | 92,0 |
132,0 | 94,0 | 94,0 | 93,5 | 93,5 | 93,0 | — |
160,0 | 94,0 | 94,0 | 94,0 | 93,5 | — | — |
200,0 | 94,5 | 94,5 | 94,5 | 94,0 | — | — |
250,0 | 94,5 | 94,5 | 94,5 | — | — | — |
315,0 | 95,0 | 95,0 | — | — | — | — |
400,0 | 95,5 | 95,5 | — | — | — | — |
Таблица 2 — Значения коэффициента мощности двигателей с нормальным и повышенным КПД
Номинальная мощность, кВт | Коэффициент мощности двигателей о. | |||||
2 | 4 | 6 | 8 | 10 | 12 | |
1,10 | 0,80 | 0,76 | 0,70 | 0,68 | — | — |
1,50 | 0,82 | 0,78 | 0,70 | 0,70 | — | — |
2,20 | 0,84 | 0,80 | 0,72 | 0,70 | — | — |
3,00 | 0,85 | 0,80 | 0,72 | 0,70 | — | — |
4,00 | 0,84 | 0,81 | 0,75 | 0,70 | — | — |
5,50 | 0,85 | 0,82 | 0,76 | 0,72 | — | — |
7,50 | 0,85 | 0,83 | 0,77 | 0,72 | — | — |
11,0 | 0,86 | 0,83 | 0,80 | 0,73 | — | — |
15,0 | 0,86 | 0,84 | 0,82 | 0,75 | — | — |
18,5 | 0,87 | 0,84 | 0,82 | 0,75 | — | — |
22,0 | 0,87 | 0,84 | 0,82 | 0,75 | — | — |
30,0 | 0,88 | 0,85 | 0,82 | 0,75 | 0,70 | — |
37,0 | 0,88 | 0,85 | 0,82 | 0,75 | 0,70 | — |
45,0 | 0,88 | 0,85 | 0,82 | 0,75 | 0,72 | 0,70 |
55,0 | 0,88 | 0,85 | 0,82 | 0,75 | 0,72 | 0,70 |
75,0 | 0,89 | 0,85 | 0,82 | 0,80 | 0,75 | 0,70 |
90,0 | 0,89 | 0,86 | 0,83 | 0,80 | 0,75 | 0,70 |
110,0 | 0,89 | 0,86 | 0,83 | 0,82 | 0,75 | 0,70 |
132,0 | 0,89 | 0,87 | 0,85 | 0,82 | 0,78 | — |
160,0 | 0,89 | 0,87 | 0,85 | 0,82 | — | — |
200,0 | 0,90 | 0,87 | 0,85 | 0,82 | — | — |
250,0 | 0,90 | 0,88 | 0,86 | — | — | — |
315,0 | 0,90 | 0,88 | — | — | — | — |
355,0 | 0,90 | 0,89 | — | — | — | — |
400,0 | 0,90 | 0,89 | — | — | — | — |
 е., при числе полюсов
е., при числе полюсов5. 4 Двигатели с повышенным КПД (энергосберегающие двигатели) мощностью от 15 до 400 кВт включительно должны иметь номинальные значения КПД и коэффициента мощности не ниже указанных в таблицах 3 и 2.
4 Двигатели с повышенным КПД (энергосберегающие двигатели) мощностью от 15 до 400 кВт включительно должны иметь номинальные значения КПД и коэффициента мощности не ниже указанных в таблицах 3 и 2.
Значения КПД, указанные в таблице 3, определены по формуле (2).
Таблица 3 — Значения КПД двигателей с повышенным КПД
Номинальная мощность, кВт | КПД двигателей, %, при числе полюсов | |||||
2 | 4 | 6 | 8 | 10 | 12 | |
15,0 | 91,3 | 91,8 | 90,6 | 90,0 | — | — |
18,5 | 91,8 | 92,2 | 91,0 | 90,6 | — | — |
22,0 | 92,3 | 92,6 | 91,8 | 91,4 | — | — |
30,0 | 92,9 | 93,7 | 91,8 | 91,8 | 90,6 | — |
37,0 | 93,5 | 93,7 | 92,7 | 92,7 | 91,0 | — |
45,0 | 93,9 | 93,9 | 93,5 | 93,5 | 92,7 | 92,3 |
55,0 | 94,3 | 94,3 | 93,9 | 93,5 | 93,5 | 92,7 |
75,0 | 94,6 | 94,7 | 93,9 | 93,9 | 93,5 | 93,1 |
90,0 | 95,0 | 95,1 | 94,3 | 94,3 | 93,9 | 93,5 |
110,0 | 94,7 | 95,1 | 94,3 | 94,3 | 94,3 | 93,5 |
132,0 | 95,1 | 95,1 | 94,7 | 94,7 | 94,3 | — |
160,0 | 95,1 | 95,1 | 95,1 | 94,7 | — | — |
200,0 | 95,5 | 95,5 | 95,5 | 95,1 | — | — |
250,0 | 95,5 | 95,5 | 95,5 | — | — | — |
315,0 | 96,0 | 96,0 | — | — | — | — |
400,0 | 96,4 | 96,4 | — | — | — | — |
5. 5 Номинальные значения показателей энергоэффективности (КПД и коэффициента мощности) указывают в технических условиях на двигатели конкретных типов.
5 Номинальные значения показателей энергоэффективности (КПД и коэффициента мощности) указывают в технических условиях на двигатели конкретных типов.
5.6 Допускаемые отклонения от номинальных значений показателей энергоэффективности — в соответствии с требованиями ГОСТ 183.
6 Маркировка
Маркировка двигателей с повышенным КПД — по ГОСТ 28330.
При маркировании в условном обозначении двигателей с повышенным КПД применяют строчную букву е, которую располагают после цифры, обозначающей число полюсов двигателя.
Пример условного обозначения асинхронного двигателя серии 5А высотой оси вращения 180 мм, длиной , двухполюсного, с повышенным КПД, климатического исполнения Т2:
5A180S2eT2
7 Методы контроля
Методы испытаний двигателей — по ГОСТ 7217.
Электронный текст документа
подготовлен ЗАО «Кодекс» и сверен по:
официальное издание
М. : Стандартинформ, 2013
: Стандартинформ, 2013
Новый подход к контролю соответствует реальным условиям работы
Электродвигатели являются важнейшим элементом многих промышленных процессов, они потребляют до 70 % от общего количества энергии на промышленном предприятии и до 46 % от общего количества производимого электричества в мире. Учитывая то, насколько большую роль электродвигатели играют в промышленных процессах, стоимость простоев, связанных с их неисправностью, может измеряться десятками тысяч долларов в час. Обеспечение эффективной и надежной работы электродвигателей — это одна из наиболее важных задач, которую ежедневно решают технические специалисты и инженеры по обслуживанию.
Эффективное использование электричества — это не просто «полезно». Во многих ситуациях от энергоэффективности зависит, прибыльной или убыточной является компания. Поскольку электродвигатели потребляют на промышленных объектах столь значительное количество энергии, эффективность их использования стала основным фактором, от которого зависит экономия и поддержание прибыльности. Кроме того, из-за желания обеспечить экономию посредством увеличения эффективности и снизить зависимость от природных ресурсов многие компании начинают следовать промышленным стандартам, таким как ИСО 50001. Стандарт ИСО 50001 устанавливает основные положения и требования для организации, внедрения и поддержания системы управления энергопотреблением, призванной обеспечить постоянную экономию.
Кроме того, из-за желания обеспечить экономию посредством увеличения эффективности и снизить зависимость от природных ресурсов многие компании начинают следовать промышленным стандартам, таким как ИСО 50001. Стандарт ИСО 50001 устанавливает основные положения и требования для организации, внедрения и поддержания системы управления энергопотреблением, призванной обеспечить постоянную экономию.
Традиционные методы проверки электродвигателей
Традиционный метод проверки производительности и КПД электродвигателей тщательно разработан, но его организация может быть связана с большими расходами, а реализация в рамках рабочих процессов трудноосуществима. Часто для проверки производительности электродвигателя требуется даже полное отключение системы, что может привести к дорогостоящему простою. Чтобы определить КПД электродвигателя, необходимо измерить широкий диапазон динамических рабочих параметров — как для входной электрической мощности, так и для выходной механической мощности. Для измерения характеристик производительности электродвигателя традиционным методом сначала техническим специалистам необходимо установить электродвигатель на испытательный стенд. Испытательный стенд представляет собой проверяемый электродвигатель, закрепленный на генераторе или на динамометре.
Для измерения характеристик производительности электродвигателя традиционным методом сначала техническим специалистам необходимо установить электродвигатель на испытательный стенд. Испытательный стенд представляет собой проверяемый электродвигатель, закрепленный на генераторе или на динамометре.
Затем с помощью вала проверяемый электродвигатель соединяют с нагрузкой. На валу закреплен датчик скорости (тахометр), а также комплект датчиков крутящего момента, которые предоставляют данные, позволяющие рассчитывать механическую мощность. Система предоставляет различные данные, включая данные о скорости, крутящем моменте и механической мощности. Некоторые системы также позволяют измерять электрическую мощность, благодаря чему можно рассчитать КПД.
КПД вычисляется по формуле:
Механическая мощность
Электрическая мощность
Во время проверки нагрузка изменяется, что позволяет определять КПД для различных режимов работы. Система испытательного стенда может показаться достаточно простой, однако с ее использованием связано несколько характерных недостатков:
- Электродвигатель необходимо снять с места использования.
- Значения нагрузки электродвигателя не являются по-настоящему репрезентативными, поскольку не характеризуют производительность электродвигателя во время реальной работы.
- Во время проведения проверки работу необходимо приостановить (что создает простой), либо необходимо временно установить сменный электродвигатель.
- Датчики крутящего момента отличаются высокой стоимостью и ограниченным рабочим диапазоном, поэтому для проверки различных электродвигателей может потребоваться несколько датчиков.
- Испытательный стенд, на котором можно проверять широкий диапазон электродвигателей, имеет высокую стоимость. Такие испытательные стенды обычно используются специалистами по ремонту электродвигателей или исследовательскими организациями.
- Не учитываются «реальные» рабочие условия.
Параметры электродвигателей
Электродвигатели могут предназначаться для различных областей применения с различными нагрузками, поэтому характеристики каждого электродвигателя отличаются. Классификация характеристик осуществляется в соответствии со стандартами Национальной ассоциации производителей электрооборудования (NEMA) или Международной электротехнической комиссии (МЭК). От этих характеристик напрямую зависит работа и КПД электродвигателя. На каждом электродвигателе закреплена паспортная табличка, на которой указаны основные рабочие параметры и информация о КПД электродвигателя в соответствии с рекомендациями NEMA или МЭК. Указанные на паспортной табличке данные можно сравнивать с реальными характеристиками режима использования. Например, сравнивая эти значения, можно узнать, что электродвигатель превышает ожидаемые характеристики скорости или крутящего момента, что может привести к сокращению срока службы электродвигателя или к преждевременному выходу из строя. Негативно сказаться на характеристиках производительности электродвигателя могут также такие явления, как асимметрия напряжения или тока, а также гармоники, связанные с плохим качеством электроэнергии. При существовании какого-либо из этих условий необходимо снизить номинал электродвигателя (то есть ожидаемая производительность электродвигателя должна быть снижена), что может привести к нарушению выполняемых процессов, если не будет производиться достаточное количество механической мощности.
Классификация характеристик осуществляется в соответствии со стандартами Национальной ассоциации производителей электрооборудования (NEMA) или Международной электротехнической комиссии (МЭК). От этих характеристик напрямую зависит работа и КПД электродвигателя. На каждом электродвигателе закреплена паспортная табличка, на которой указаны основные рабочие параметры и информация о КПД электродвигателя в соответствии с рекомендациями NEMA или МЭК. Указанные на паспортной табличке данные можно сравнивать с реальными характеристиками режима использования. Например, сравнивая эти значения, можно узнать, что электродвигатель превышает ожидаемые характеристики скорости или крутящего момента, что может привести к сокращению срока службы электродвигателя или к преждевременному выходу из строя. Негативно сказаться на характеристиках производительности электродвигателя могут также такие явления, как асимметрия напряжения или тока, а также гармоники, связанные с плохим качеством электроэнергии. При существовании какого-либо из этих условий необходимо снизить номинал электродвигателя (то есть ожидаемая производительность электродвигателя должна быть снижена), что может привести к нарушению выполняемых процессов, если не будет производиться достаточное количество механической мощности. Снижение номинала рассчитывается по стандарту NEMA в соответствии с данными, указанными для данного типа электродвигателя. Стандарты NEMA и МЭК некоторым образом отличаются друг от друга, но в целом они придерживаются одинаковых положений.
Снижение номинала рассчитывается по стандарту NEMA в соответствии с данными, указанными для данного типа электродвигателя. Стандарты NEMA и МЭК некоторым образом отличаются друг от друга, но в целом они придерживаются одинаковых положений.
«Реальные» рабочие условия
При выполнении проверки электродвигателей на стенде электродвигатель обычно работает в самых лучших условиях. Однако во время реальной работы самые лучшие условия, как правило, не удается обеспечить. Непостоянство рабочих условий приводит к снижению производительности электродвигателя. Например, на промышленном предприятии могут быть нагрузки, оказывающие непосредственное влияние на качество электроэнергии и вызывающие асимметрию в системе или потенциально вызывающие гармоники. Каждое из этих условий может серьезно повлиять на производительность электродвигателя. Кроме того, нагрузка, приводимая в движение электродвигателем, может быть неоптимальной или может не соответствовать изначальному предназначению электродвигателя. Нагрузка может быть слишком большой для данного электродвигателя, или возможна перегрузка вследствие плохого управления процессами. Движению электродвигателя может также препятствовать чрезмерное трение, вызванное наличием какого-либо постороннего предмета, блокирующего работу насоса или рабочего колеса вентилятора. Обнаружение этих аномалий может быть затруднено и может потребовать много времени, вследствие чего эффективный поиск неисправностей будет проблематичным.
Нагрузка может быть слишком большой для данного электродвигателя, или возможна перегрузка вследствие плохого управления процессами. Движению электродвигателя может также препятствовать чрезмерное трение, вызванное наличием какого-либо постороннего предмета, блокирующего работу насоса или рабочего колеса вентилятора. Обнаружение этих аномалий может быть затруднено и может потребовать много времени, вследствие чего эффективный поиск неисправностей будет проблематичным.
Новый подход
Анализатор качества электроэнергии и работы электродвигателей Fluke 438-II обеспечивает модернизированный и экономичный способ проверки КПД электродвигателя, при этом отсутствует необходимость в установке внешних механических датчиков и в дорогостоящих простоях. Прибор Fluke 438-II, созданный на основе анализаторов качества электроэнергии Fluke серии 430-II, оснащен полным набором функций для анализа качества электроэнергии, а также для измерения механических параметров на электродвигателях прямого пуска. 438-II использует данные, указанные на паспортной табличке электродвигателя (NEMA или МЭК) вместе с данными измерений трехфазного питания, чтобы в режиме реального времени рассчитывать параметры производительности электродвигателя, включая скорость, крутящий момент, механическую мощность и КПД, при этом использование дополнительных датчиков крутящего момента и частоты вращения не требуется. Кроме того, 438-II непосредственно вычисляет коэффициент снижения мощности электродвигателя в режиме работы.
438-II использует данные, указанные на паспортной табличке электродвигателя (NEMA или МЭК) вместе с данными измерений трехфазного питания, чтобы в режиме реального времени рассчитывать параметры производительности электродвигателя, включая скорость, крутящий момент, механическую мощность и КПД, при этом использование дополнительных датчиков крутящего момента и частоты вращения не требуется. Кроме того, 438-II непосредственно вычисляет коэффициент снижения мощности электродвигателя в режиме работы.
Чтобы прибор Fluke 438-II выполнил эти измерения, технический специалист или инженер должен ввести следующие данные: номинальную мощность в кВт или л. с., номинальное напряжение и силу тока, номинальную частоту, номинальный cos φ или коэффициент мощности, номинальный сервис-фактор, а также тип электродвигателя в соответствии с классификацией NEMA или МЭК.
Принцип работы
Fluke 438-II выполняет механические измерения параметров (скорости вращения электродвигателя, нагрузки, крутящего момента и КПД), применяя уникальные алгоритмы к электрическим сигналам. Эти алгоритмы основаны на сочетании физических и управляемых данными моделей асинхронного электродвигателя. При этом не требуются предварительные проверки, которые обычно нужны для измерения параметров электродвигателя (например, сопротивление статора). Скорость электродвигателя можно рассчитать на основе гармоник пазов ротора, присутствующих в сигналах тока. Крутящий момент вала электродвигателя можно связать со значениями напряжения, силы тока и скольжения асинхронного электродвигателя, используя хорошо известные, но сложные физические формулы. Электрическая мощность измеряется с использованием входных сигналов силы тока и напряжения. При получении расчетного значения крутящего момента и скорости, механическая мощность (или нагрузка) вычисляется на основе крутящего момента, умноженного на частоту вращения. КПД электродвигателя вычисляется путем деления рассчитанной механической мощности на измеренную электрическую мощность. Компания Fluke провела обширные испытания на электродвигателях, приводящих в движение динамометры.
Эти алгоритмы основаны на сочетании физических и управляемых данными моделей асинхронного электродвигателя. При этом не требуются предварительные проверки, которые обычно нужны для измерения параметров электродвигателя (например, сопротивление статора). Скорость электродвигателя можно рассчитать на основе гармоник пазов ротора, присутствующих в сигналах тока. Крутящий момент вала электродвигателя можно связать со значениями напряжения, силы тока и скольжения асинхронного электродвигателя, используя хорошо известные, но сложные физические формулы. Электрическая мощность измеряется с использованием входных сигналов силы тока и напряжения. При получении расчетного значения крутящего момента и скорости, механическая мощность (или нагрузка) вычисляется на основе крутящего момента, умноженного на частоту вращения. КПД электродвигателя вычисляется путем деления рассчитанной механической мощности на измеренную электрическую мощность. Компания Fluke провела обширные испытания на электродвигателях, приводящих в движение динамометры. Были измерены значения фактической электрической мощности, крутящего момента вала электродвигателя, а также скорости электродвигателя. Эти значения сравнивались со значениями, полученными с прибора 438-II для определения погрешности.
Были измерены значения фактической электрической мощности, крутящего момента вала электродвигателя, а также скорости электродвигателя. Эти значения сравнивались со значениями, полученными с прибора 438-II для определения погрешности.
Сводный обзор
Традиционные методы проверки производительности и КПД электродвигателей тщательно разработаны, однако это не означает, что они широко используются. В значительной степени это объясняется тем, что отключение электродвигателей, а иногда и целых систем, для выполнения проверок приводит к простою производства, а это связано с большими расходами. Прибор Fluke 438-II предоставляет чрезвычайно полезную информацию, которую до этого было крайне сложно и дорого получить. Кроме того, наличие на приборе Fluke 438-II передовых функций по анализу качества электроэнергии позволяет измерять качество электроэнергии непосредственно во время работы системы. Выполнение важных измерений для определения КПД электродвигателя стало проще, поскольку использование отдельных внешних датчиков крутящего момента и скорости не требуется, благодаря чему можно анализировать производительность самых распространенных промышленных процессов, использующих электродвигатель, не прерывая их выполнения. Это позволяет техническим специалистам сокращать время простоя и отслеживать тенденции производительности электродвигателя во времени, благодаря чему можно получить более полную картину общего состояния системы и ее производительности. Отслеживание тенденций производительности позволяет увидеть изменения, которые могут указывать на приближающийся отказ электродвигателя. Благодаря этой информации можно выполнить замену до того, как электродвигатель выйдет из строя.
Это позволяет техническим специалистам сокращать время простоя и отслеживать тенденции производительности электродвигателя во времени, благодаря чему можно получить более полную картину общего состояния системы и ее производительности. Отслеживание тенденций производительности позволяет увидеть изменения, которые могут указывать на приближающийся отказ электродвигателя. Благодаря этой информации можно выполнить замену до того, как электродвигатель выйдет из строя.
Электродвигатели с высокой энергоэффективностью — Control Engineering Russia
Экологическое мышление мотивирует многих, а экология сама по себе является темой повседневной жизни. К сожалению, не в сфере бизнеса, хотя именно там любое ограничение потребления энергии означает огромную экономию. Электродвигатели с высоким КПД могут помочь в реализации этой задачи, тем более, что все более жесткие нормы во многих странах просто требуют этого.
Стоит знать, что когда говорят о двигателях с высоким КПД, то это относится обычно к традиционным асинхронным двигателям. Индукционные двигатели выпускаются в стандартном энергетическом исполнении, в исполнении с повышенной эффективностью и суперэффективные, – говорит Дэвид Хансен, глобальный менеджер продукта Kinetix Motion Control Rockwell Automation. — Двигатели же с постоянными магнитами выпускаются только по одному энергетическому классу.
Индукционные двигатели выпускаются в стандартном энергетическом исполнении, в исполнении с повышенной эффективностью и суперэффективные, – говорит Дэвид Хансен, глобальный менеджер продукта Kinetix Motion Control Rockwell Automation. — Двигатели же с постоянными магнитами выпускаются только по одному энергетическому классу.
Не случайно двигатели с постоянными магнитами предлагаются только в одном энергетическом классе: их конструкция сама по себе обеспечивает высокий КПД, поскольку исключает потребность намагничивания ротора. Джон Малиновски, старший продукт-менеджер в фирме Baldor Electric Company подчеркивает, что существует группа индукционных двигателей, которые соответствуют международным стандартам IEC 60034-30 по категории IE3 (высшая категория) и американским NEMA по категории Premium (тоже высшая категория).
По этой причине обсуждение ограничится универсальными асинхронными двигателями, роторы которых изготовлены из ферромагнитных материалов. Характеристики эффективности двигателей с постоянными магнитами будут обсуждены в другой раз.
— Двигатели энергетической категории Premium (аналог IE3) более чувствительны к исполнению, чем более старые двигатели, они создают меньше шума и вибрации, выделяют меньше тепла и являются более долговечными, — утверждает Малиновски.
— Более высокий КПД современных асинхронных двигателей является результатом совершенствования конструкции, правильной геометрии обмоток, использования более качественных материалов (в том числе меди в роторе), что приводит к более эффективному преобразованию электрической энергии в механическую, — утверждает Петер Фишбах, менеджер промышленного сектора в фирме Rexroth.
Что определяет КПД двигателя
— Ключом к более высокому КПД является ограничение потерь – констатирует Малиновски. – Больше меди в обмотке — меньше потери в проводимости, а в свою очередь более качественная магнитная сталь уменьшает потери на перемагничивание. Меньшие потери мощности — это меньший нагрев, следовательно, и меньший охлаждающий вентилятор – очередная выгода.
Фишбах добавляет, что б?льшая часть потерь ? это потери на проводимости в роторе и статоре, часто называемые потерями на гистерезиса или потерями в железе.
Хансен перечисляет по пунктам список конструктивных решений, повышающих энергоэкономичность их приводов:
- Сопротивление обмоток. ? С ростом сопротивления обмоток снижается КПД. Чтобы повысить эффективность двигателей, проектировщики стараются снизить сопротивление за счет увеличения количества меди в желобках и уменьшения обмоток, выступающих за статор.
- Ламинирующее средство. – Потери в обмотках статора зависят непосредственно от качества примененной магнитной стали и от ламинирующего средства. Тонкий изолирующий слой приводит к меньшим потерям в сердечнике, нежели толстый слой.
- Геометрия зубьев. – Специальная геометрия зубьев увеличивает концентрацию магнитного потока внутри двигателя. Б?льшая концентрация ? это меньшее рассеяние энергии, а следовательно, более высокий КПД
Важен комплекс
— Целью большинства промышленных применений является сочетание высокого КПД с высокой производительностью, – считает Фишбах. — Ключ к успеху — анализ, моделирование и оптимизация всей системы, предшествующие принятию решения о закупке отдельных компонентов, таких, как двигатели.
— Ключ к успеху — анализ, моделирование и оптимизация всей системы, предшествующие принятию решения о закупке отдельных компонентов, таких, как двигатели.
С этим соглашается Малиновски: — Замена двигателей — это простой шаг в стремлении к большей эффективности, но выгода здесь ограничена. Стоит иметь двигатели с КПД порядка 95%, но они должны взаимодействовать с высококачественными трансмиссиями с КПД 90-95%, а не с изношенными конструкциями с КПД 50-60%.
Фишбах подтверждает: — Более высокая эффективность — понятие относительное, поскольку надо учитывать и другие факторы, влияющие на общую эффективность системы, такие, как время цикла или объем производства. Например, моментный двигатель с КПД 80% может потреблять меньше энергии, чем сервопривод с КПД 95%, поскольку не требует применения трансмиссии, а это может дополнительно увеличивать производительность системы.
Чего не делать
— Самые большие ошибки совершают те инженеры, которые все внимание сосредотачивают на щитке двигателя и ожидают пропорционального роста эффективности в их приложении, – предостерегает Фишбах.
Любой, в том числе и энергосберегающий двигатель имеет свою характеристику, поэтому он должен быть подобран к конкретному применению. Например, двигатель энергетического класса «премиум» не сэкономит много энергии, если он будет загружен частично или будет использоваться спорадически.
Малиновски приводит пример замены старого двигателя, работающего с центробежным насосом, на новый премиум-класса. Ротор насоса, который был спроектирован под взаимодействие со старым двигателем, не заменяют. Новый, более производительный двигатель будет, вероятно, работать с более высокими оборотами, что вызовет общий рост потребления энергии. Система может быть более энергоэффективна, но дополнительная работа, которая будет совершена, может быть ненужной.
— Проектировщики, которые действительно заинтересованы увеличением эффективности, не будут стремиться исключительно к замене двигателя, а проанализируют всю систему на предмет расходования энергии, – советует Хансен. — Даже самый производительный двигатель, работая с низкоэффективной передачей, не принесет существенных энергетических выгод. Любая механическая передача между двигателем и нагрузкой — это потеря энергии. Очень точные геликоидальные трансмиссии сразу после извлечения из упаковки имеют КПД 90-95%. Изношенная трансмиссия — это КПД на уровне 50-60%.
Любая механическая передача между двигателем и нагрузкой — это потеря энергии. Очень точные геликоидальные трансмиссии сразу после извлечения из упаковки имеют КПД 90-95%. Изношенная трансмиссия — это КПД на уровне 50-60%.
— Самым лучшим решением с точки зрения эффективности машины был бы отказ от механических трансмиссий и применение моментных двигателей (с постоянными магнитами) – заключает он.
А вы включаете в проект, а потом покупаете двигатели с высоким КПД? Будьте к этому готовы.
Вконтакте
Google+
Индукция против. КПД двигателя с постоянным магнитом
Поскольку электрификация автомобилей продолжается ускоренными темпами, многие задаются вопросом, какой тип двигателя лучше всего подходит для современной электрической трансмиссии.
Может быть трехфазный асинхронный двигатель или двигатель с постоянными магнитами? Оба мотора в настоящее время используются в электромобилях. Оба предлагают высокую эффективность и хорошую производительность. Но что лучше?
Оба предлагают высокую эффективность и хорошую производительность. Но что лучше?
Существует веских аргументов в пользу того, что двигатель с постоянными магнитами превосходит по сравнению с асинхронным двигателем.Неотъемлемые преимущества порошковой металлургии — возможность увеличения производительности двигателя и снижения общей стоимости — могут быть эффективным инструментом при производстве этих приводных систем.
Давайте проведем несколько сравнений эффективности асинхронных двигателей с двигателями с постоянными магнитами, чтобы увидеть их преимущества и потенциальные недостатки. Мелкие детали конструкции электродвигателя более сложны, чем описано ниже, но это отличное начало для тех, кто взвешивает свои варианты.
КПД двигателя с постоянным магнитом
Как следует из названия, электромотор с постоянными магнитами использует постоянные магниты на роторе (см. Рисунок ниже).Переменный ток, приложенный к статору, приводит к вращению ротора. Поскольку магниты постоянно намагничены, ротор может работать синхронно с коммутируемым переменным током. Исключается проскальзывание, необходимое в асинхронных двигателях, повышает вашу тепловую эффективность.
Поскольку магниты постоянно намагничены, ротор может работать синхронно с коммутируемым переменным током. Исключается проскальзывание, необходимое в асинхронных двигателях, повышает вашу тепловую эффективность.
Собственный КПД двигателя с постоянными магнитами выше, чем у асинхронного двигателя. Оба двигателя имеют трехфазную конструкцию благодаря полностью оптимизированной производительности. Однако асинхронные двигатели были разработаны для работы в основном на частоте 60 Гц. При увеличении частоты потери на вихревые токи в асинхронных двигателях будут намного больше, чем в двигателях с постоянными магнитами, использующих технологию порошкового металла.
Независимо от того, как вы изгибаете или формируете асинхронный двигатель, хорошо спроектированный синхронный двигатель с постоянными магнитами обеспечит увеличенный диапазон, лучшую производительность и т. Д.
Использование материала двигателя с постоянным магнитом
В постоянном магните ротор теперь может быть сплошной деталью, например, из магнитного материала порошковой металлургии, полученного методом прессования и спекания. Вы можете сконструировать ротор таким образом, чтобы магниты были приклеены к внешнему диаметру или заключены в ротор, как показано ниже:
Вы можете сконструировать ротор таким образом, чтобы магниты были приклеены к внешнему диаметру или заключены в ротор, как показано ниже:
( Сравнение асинхронного двигателя переменного тока и двигателя с постоянными магнитами)
Необязательно делать из листовой электротехнической стали! Ротор из порошкового металла может иметь прорези, которые вы видите на изображении выше, спроектированные за счет чистой формы порошкового металла, что исключает необходимость в дорогостоящей обработке. Используя спеченный магнитомягкий материал, силовой металлический ротор для двигателя с постоянными магнитами может достичь прочности, аналогичной конкурирующим процессам.
Однако индукционный ротор по-прежнему требует штамповки и ламинирования. В процессе штамповки образуется гораздо больше отходов, чем при порошковой металлургии.
Использование постоянных магнитов в двигателях
Постоянный двигатель мощностью 50 кВт (около 70 л.с.) обычно весит менее 30 фунтов. (Обратите внимание, что вам все равно понадобится инвертор постоянного тока в переменный, чтобы генерировать достаточное напряжение и частоту.)
(Обратите внимание, что вам все равно понадобится инвертор постоянного тока в переменный, чтобы генерировать достаточное напряжение и частоту.)
В автомобильной промышленности используются двигатели с постоянными магнитами, включая Chevy Volt (производство прекращено), Chevy Bolt и Tesla Model 3.
- Chevy Bolt — это конструкция мощностью 200 л.с. с магнитами внутри ротора. В нем используется односкоростной редуктор с соотношением 7,05 к 1 для привода колес. Общедоступных оценок веса нет.
- Tesla Model 3 также использует двигатель с постоянными магнитами. Доступно очень мало деталей, но ходят слухи, что магниты расположены в виде массива Halback. Этот массив фокусирует магнитные линии потока для полной оптимизации производительности.
Скорость двигателя с постоянными магнитами такая же, как и у его индукционного аналога:
- Нс = 120 * частота / количество полюсов
(Ns — синхронная скорость.Число полюсов — это общее число полюсов на фазу, включая северный и южный полюса. )
)
Помните, что ротор не будет проскальзывать относительно рабочей частоты статора.
Стоимость против Производительность
Одним из основных факторов, влияющих на двигатели с постоянными магнитами, является стоимость магнитов. Если вы использовали высокоэнергетические магниты (такие как железо, неодим, бор), вы почувствовали боль в своем бюджете (или у вашего начальника). Потенциальные потери при штамповке ламинирующего материала только усугубляют проблему.
Возможности для порошковой металлургии в этих типах двигателей широкие. Роторы двигателя с постоянными магнитами могут быть изготовлены из спеченного порошкового металла, независимо от того, выбираете ли вы внутренний или внешний путь проектирования. Статор также может быть изготовлен из магнитомягких композитов. При ожидаемых высоких частотах переключения потери в SMC ниже, чем в ламинированном 3% -ном кремниевом железе, еще больше повышает эффективность этой конструкции. Проще говоря, магнитомягкие композиты созданы специально для высоких частот.
Проще говоря, магнитомягкие композиты созданы специально для высоких частот.
Металлический порошок может повысить эффективность двигателя с постоянными магнитами по сравнению с асинхронным двигателем. Возможности порошковой металлургии по формированию трехмерной формы позволяют формировать статор, полностью покрывающий весь провод магнитомягким композитом, чтобы исключить потери на конце витка. .
Это некоторые из многих преимуществ, которые предлагает металлический порошковый металл — как спеченные магнитомягкие материалы, так и SMC.
(Кривая КПД двигателя с постоянным магнитом в зависимости отасинхронные двигатели. Эта диаграмма характеристик была разработана для частоты сети около 60 Гц. Ожидайте, что по мере увеличения частоты производительность станет еще лучше. График любезно предоставлен Empowering Pumps & Equipment )
Вышеупомянутое обсуждение было сосредоточено на рассмотрении двигателей с постоянными магнитами, в которых используются конструкции статора, аналогичные тем, которые используются в асинхронных двигателях переменного тока.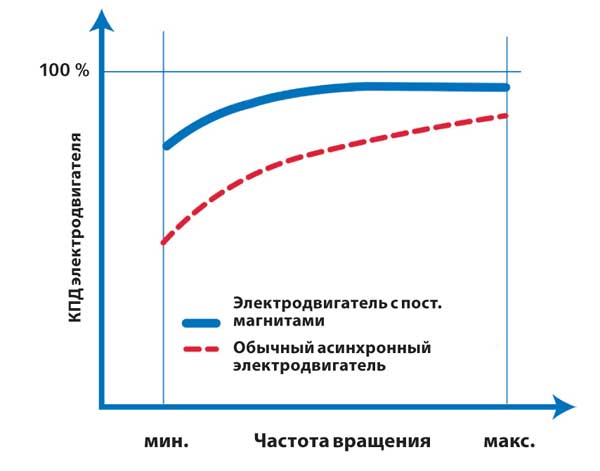 Тем не менее, было сделано основных разработок в конструкции новых типов двигателей , в которых также используются постоянные магниты для повышения эффективности электродвигателя.
Тем не менее, было сделано основных разработок в конструкции новых типов двигателей , в которых также используются постоянные магниты для повышения эффективности электродвигателя.
Linear Labs разработала новую схему двигателя, сочетающую высокую эффективность с прочной конструкцией. Он устраняет некоторые из дорогих редкоземельных магнитов, с которыми вы привыкли годами.
Мы думаем, что двигатели с постоянными магнитами — это волна будущего. Для полноты картины давайте теперь посмотрим на конструкцию асинхронного двигателя, с которой работают 90% инженеров.
КПД трехфазного асинхронного двигателя переменного тока
Никола Тесла изобрел асинхронный двигатель в 1883 году.Это принципиально та же базовая конструкция статора, что и у постоянного двигателя, но без постоянных магнитов.
Его основной принцип работы заключается в том, что магнитное поле, создаваемое в статоре, создает встречный ток в стержнях ротора. Индуцированный ток ротора затем создает магнитное поле в пластинах ротора. Это противоположное поле заставляет ротор вращаться — при переключении тока статора ротор всегда отстает и заставляет ротор вращаться.
Это противоположное поле заставляет ротор вращаться — при переключении тока статора ротор всегда отстает и заставляет ротор вращаться.
Преимущества этого индуцированного магнитного поля заключаются в том, что не нужны ни щетки, ни обмотка ротора.Двигатели этого типа:
- Надежный
- Прочный
- Простота обслуживания
Выше представлена типичная конфигурация асинхронного двигателя. Обратите внимание, что ротор имеет пластинки в сердечнике и электропроводящий материал (медь или алюминий) в пазах ротора, так называемых стержнях ротора.
Для большинства промышленных применений (более 1 л.с.) и для автомобильных трансмиссий трехфазный асинхронный двигатель является самым распространенным явлением.В этой конструкции три фазы обернуты вокруг статора таким образом, чтобы обеспечить более плавную работу и высокий КПД. Трехфазные двигатели переменного тока самозапускаются при подаче напряжения на обмотки статора. Во многих случаях так называемые стержни ротора расположены под углом для увеличения крутящего момента.
КПД асинхронного двигателя переменного тока на практике
Трехфазное использование в промышленных приложениях относительно просто, поскольку входящее напряжение уже является трехфазным. Однако в автомобильной промышленности вам необходимо преобразовать мощность постоянного тока аккумулятора в трехфазный переменный ток.Это происходит через преобразователь постоянного тока в переменный.
В асинхронных двигателях переменного тока необходимо учитывать скорость ротора относительно входящей частоты переменного тока. Первоначально это определяется так называемой синхронной скоростью. Для асинхронного двигателя переменного тока синхронная скорость рассчитывается следующим образом:
- Нс = 120 * частота / количество полюсов
(Помните, что Ns — это синхронная скорость. Число полюсов — это общее число полюсов на фазу, включая как северный, так и южный полюса.)
Для двухполюсного асинхронного двигателя переменного тока, работающего при 60 Гц, синхронная скорость двигателя будет 3600 об / мин. Однако, если бы ротор вращался со скоростью 3600 об / мин в этой конфигурации, у вас был бы нулевой крутящий момент от двигателя. В идеале должно быть некоторое проскальзывание ротора относительно частоты; обычно это около 5%. Таким образом, эти двигатели считаются асинхронными двигателями.
Однако, если бы ротор вращался со скоростью 3600 об / мин в этой конфигурации, у вас был бы нулевой крутящий момент от двигателя. В идеале должно быть некоторое проскальзывание ротора относительно частоты; обычно это около 5%. Таким образом, эти двигатели считаются асинхронными двигателями.
КПД трехфазных асинхронных двигателей может варьироваться от 85% до 96%. См. Таблицу ниже для зависимости крутящего момента отсоскальзывать.
(Типичный крутящий момент в зависимости от скольжения для асинхронных двигателей переменного тока — любезно предоставлено All About Circuits )
Асинхронные двигатели мощностью 50–100 л.с. для промышленного применения имеют вес от 700 до почти 1000 фунтов. Слишком тяжело для автомобильной промышленности, правда?
Утверждается, что некоторые модели асинхронных двигателей Tesla весят всего 70 фунтов. и может генерировать 360 л.с. при 18000 об / мин.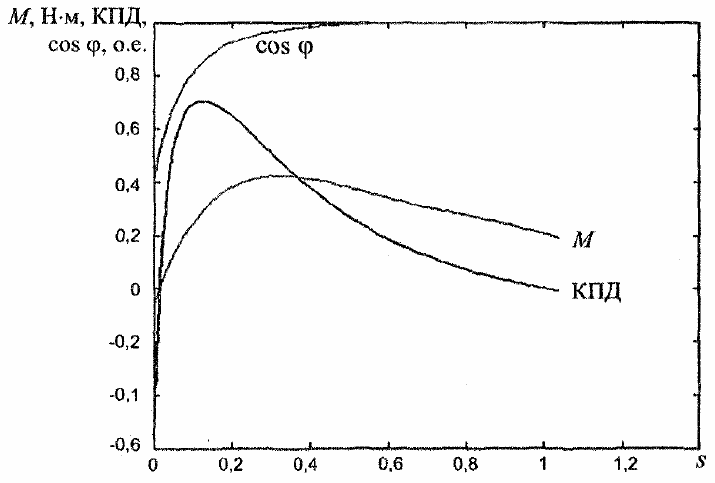 Общий вес двигателя и инвертора составляет около 350 фунтов.- все еще намного легче, чем средний двигатель внутреннего сгорания.
Общий вес двигателя и инвертора составляет около 350 фунтов.- все еще намного легче, чем средний двигатель внутреннего сгорания.
Этот двигатель представляет собой трехфазный двигатель с восемью полюсами на фразу, что означает, что частота переменного тока, используемая для выработки этой мощности, составляет около 1200 Гц. На этих рабочих частотах вихретоковый нагрев ламинирующего материала будет довольно высоким. Этот автомобильный двигатель Tesla требует значительного охлаждения, чтобы не допустить его перегрева. Также немного иронично, что GM дебютировала в своем автомобиле EV1 в середине 90-х годов с асинхронным двигателем, который был ограничен тем фактом, что он использовал свинцово-кислотные батареи вместо литий-ионных батарей.
Стоимость асинхронных двигателей
Ключевым преимуществом асинхронных двигателей переменного тока для электромобилей является стоимость. Они относительно дешевы в постройке.
В индукционных конструкциях
переменного тока используются стальные пластины как в статоре, так и в роторе; их можно штамповать почти одновременно из одного листа материала. Другими словами, процент брака намного ниже, чем у вашей средней работы по штамповке.
Другими словами, процент брака намного ниже, чем у вашей средней работы по штамповке.
Однако уникальный дизайн автомобильного мотора Tesla стоит немного дороже.Трудно найти точную цену в Интернете, но вариант с полным приводом для Tesla добавляет около 4000 долларов к общей стоимости автомобиля. Вы также должны учитывать повышенные требования к охлаждению на этих высоких частотах переменного тока.
Индукция против. Эффективность двигателя с постоянным магнитом: победитель …
Несмотря на преимущества использования магнитомягких материалов в двигателе с постоянными магнитами — SMC не являются фактором в индукционных конструкциях — выбор типа двигателя для вашей трансмиссии затруднен.У каждого есть свои преимущества и недостатки.
Несмотря на то, что асинхронный двигатель переменного тока был впервые разработан более 100 лет назад, он по-прежнему жизнеспособен благодаря повышению эффективности и производительности в 20-м и 21-м веках. Двигатель с постоянными магнитами — относительная новинка, но обещает более высокую производительность и, возможно, меньший вес.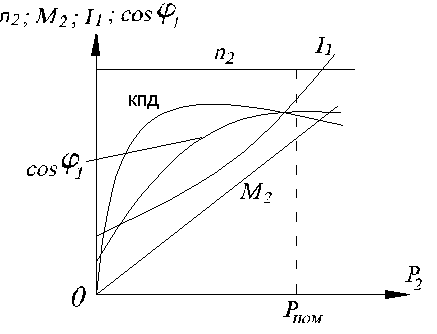
Основным камнем преткновения для двигателей с постоянными магнитами является потенциально высокая стоимость магнитов. К счастью, на горизонте есть многообещающие разработки, которые могут устранить этот недостаток.
Мы пользуемся услугами уважаемого дизайнера двигателей, чтобы помочь клиентам с такими проектами. Если вам нужна помощь в разработке компонентов, чтобы в полной мере использовать весь потенциал порошковой металлургии для магнитных приложений переменного или постоянного тока, посетите наш новый ресурсный центр или свяжитесь с нами!
Высокоэффективные двигатели и экологичность — Электромоторостроение
Согласно некоторым исследованиям, электродвигатели составляют около 45% от общего потребления электроэнергии [1].Если мы сосредоточим анализ на одной из наиболее энергоемких сфер, а именно на промышленной, то доля двигателей возрастет примерно до двух третей.
Учитывая, что некоторые из машин, которые в настоящее время используются, устарели, очевидно, что замена на новые более эффективные двигатели приведет к важным преимуществам для окружающей среды и использования ресурсов, а также к затратам на производство и, следовательно, к конкурентоспособности. Они подсчитали, например, что в единственной Европе использование передовых приводных технологий вместо устаревших может привести к сокращению годового потребления на 135 ТВт.ч и выбросов CO 2 на 69 миллионов тонн [2].Оценивая весь жизненный цикл двигателя в постоянной работе, мы можем убедиться, что затраты, связанные с потреблением энергии, составляют, безусловно, основной процент от общей стоимости (даже более 90%, [3]).
Они подсчитали, например, что в единственной Европе использование передовых приводных технологий вместо устаревших может привести к сокращению годового потребления на 135 ТВт.ч и выбросов CO 2 на 69 миллионов тонн [2].Оценивая весь жизненный цикл двигателя в постоянной работе, мы можем убедиться, что затраты, связанные с потреблением энергии, составляют, безусловно, основной процент от общей стоимости (даже более 90%, [3]).
По этим причинам в Европейском Союзе , а также в США, Китае и других странах действуют нормативные планы, предусматривающие обязательное соблюдение требований постепенно увеличивающейся эффективности для новых установок.Согласно Стандарту минимальных энергетических характеристик (MEPS), например, двигатели, выпущенные на рынок ЕС с января 2017 года в диапазоне мощности от 0,75 до 375 кВт, должны иметь уровень эффективности IE3 или уровень эффективности IE2 при питании от инвертора (см. Рис.1), за очень немногими исключениями.
Рис.1), за очень немногими исключениями.
Рис. 1. Значения КПД, соответствующие классам IE, определенным нормативом IEC / EN 60034-30-1: 2014.
Благодаря наиболее распространенной технологии среди двигателей сегодня, асинхронному двигателю one (или Induction Motor , IM), требуемые в будущем улучшения будут невозможны, по крайней мере, при разумных затратах и для всех диапазонов мощности.Эти аспекты в сочетании с другими факторами, такими как растущее осознание важности снижения энергопотребления, приводят к внедрению двигателей, которые практически не распространялись до сих пор, таких как синхронные двигатели с постоянным магнитом , [4] [5]. Фактически, двигатели этого класса обладают внутренними характеристиками, которые позволяют заметно улучшить КПД и удельную мощность, в частности очень низкие потери в роторе.
Даже если уже в восьмидесятые «бесщеточные» серводвигатели (т.е.е. Surface Mount ‑ PMSM, SM ‑ PMSM) использовались в промышленной автоматизации, благодаря их превосходной управляемости и высокой динамике применение электрических синхронных машин с раскрученным ротором долгое время оставалось ограниченным конкретными приложениями. Напротив, за последние несколько лет, благодаря вышеупомянутым факторам, касающимся эффективности и снижению стоимости производства двигателей и инверторов, внедрение этого типа двигателей заметно расширилось.
Напротив, за последние несколько лет, благодаря вышеупомянутым факторам, касающимся эффективности и снижению стоимости производства двигателей и инверторов, внедрение этого типа двигателей заметно расширилось.
Классификация двигателей переменного тока
Большинство двигателей переменного тока (AC) трехфазные, даже если есть некоторые исключения, например, в случае однофазных и шаговых двигателей (которые обычно двухфазные).Наиболее важным различием обычно является синхронная и асинхронная машины, различие основано на том факте, что механическая скорость вращения в установившемся режиме строго связана (синхронизирована) или нет с частотой вращения магнитного поля статора. Это различие конкретно отражается в том факте, что для создания крутящего момента в асинхронной машине наличие индуцированных токов в роторе необходимо, тогда как в синхронных машинах это не нужно (и, наоборот, нежелательно).
Синхронные машины отличаются тем, что магнитное поле ротора геометрически связано с механическим положением самого ротора. Поле ротора может создаваться током, который проходит через обмотку (синхронные двигатели с намотанным ротором), постоянными магнитами (синхронный постоянный магнит) или самим током статора, модулируемым магнитной анизотропией ротора (синхронное сопротивление).
Поле ротора может создаваться током, который проходит через обмотку (синхронные двигатели с намотанным ротором), постоянными магнитами (синхронный постоянный магнит) или самим током статора, модулируемым магнитной анизотропией ротора (синхронное сопротивление).
Конструктивно и ротор, и статор машин с радиальным потоком (которых намного больше) изготавливаются путем наложения ферромагнитных пластин. своевременно заглушены, решение, направленное на препятствование паразитным токам.Ротор обычно имеет цилиндрическую форму и может быть оборудован пространствами для размещения постоянных магнитов или проводящего материала.
На рис. 2 схематически представлены секции только что перечисленных двигателей различных типов (за исключением синхронного с фазным ротором).
Рис. 2. Различные конфигурации ротора (слева направо): асинхронный или асинхронный двигатель (IM), синхронный двигатель с внутренними постоянными магнитами (IPMSM), синхронные двигатели с внутренними постоянными магнитами и клеткой ротора (IPMSM с линейным запуском), синхронные с поверхностными постоянными магнитами. двигатель (SM-PMSM), синхронный реактивный двигатель (SynRM).
двигатель (SM-PMSM), синхронный реактивный двигатель (SynRM).
Самые темные области (щели) соответствуют обмоткам, постоянные магниты обозначены синим цветом, а серая зона секции представляет ферромагнитный материал (ламинирование). Как видите, разница между различными типами двигателей сосредоточена в роторе, тогда как статор (кроме особых случаев) может быть реализован таким же образом. В асинхронном двигателе пазы ротора заполняются расплавом, который представляет собой так называемую «беличью клетку», обычно сделанную из алюминия или, в последнее время, из меди (с более высокими затратами, чтобы снизить потери).
В двигателях с постоянными магнитами , напротив, магниты могут быть вставлены в соответствующие резьбы внутри конструкции ротора (IPMSM и IPMSM с линейным запуском) или нанесены на поверхность в случае SM ‑ PMSM. В случае SynRM, вместо этого, резьбы внутри ротора просто пустые и называются «барьерами потока», поскольку они выполняют функцию увеличения сопротивления (т. е. способности противодействовать прохождению магнитного потока) вдоль одних направлений, отдавая предпочтение другим ( т.е. дорожки больше характеризуются наличием железа).
е. способности противодействовать прохождению магнитного потока) вдоль одних направлений, отдавая предпочтение другим ( т.е. дорожки больше характеризуются наличием железа).
В свою очередь синхронные двигатели можно подразделить по принципу создания крутящего момента. В двигателях с поверхностными постоянными магнитами создание крутящего момента происходит только благодаря взаимодействию между полем, создаваемым постоянными магнитами, и током статора.
Напротив, в реактивных двигателях , используется системная тенденция минимизировать сопротивление магнитных путей, если они подвергаются возбуждению. В двигателях с внутренним магнитом (IPMSM) обычно используются оба принципа.
При производстве постоянных магнитов используются определенные материалы для достижения высоких значений индукции и предотвращения риска размагничивания (обычно связанного с высокими температурами или сильным магнитным полем). Наиболее часто используемые материалы — неодим-железо-бор, самарий-кобальт и алюминий-никель-кобальт. Особенно в случае SM ‑ PMSM, количество активного магнитного материала велико, и в общей стоимости большой вес сырья. Это состояние усугубляется сильной изменчивостью цен на так называемые «редкоземельные элементы» [7], элементы, используемые в небольших количествах, но очень важные для качества магнита.Помимо проблем со стоимостью и доступностью, эти материалы вызывают также важные экологические, политические и этические вопросы, касающиеся их добычи, торговли и утилизации. По этим причинам огромные ресурсы вкладываются в исследования и разработки различных материалов и, особенно, в проект двигателей, которые сводят к минимуму использование постоянных магнитов [8] или позволяют использовать так называемые ферриты, т.е. керамические магнитные материалы, в которых используются менее проблемные материалы.
Особенно в случае SM ‑ PMSM, количество активного магнитного материала велико, и в общей стоимости большой вес сырья. Это состояние усугубляется сильной изменчивостью цен на так называемые «редкоземельные элементы» [7], элементы, используемые в небольших количествах, но очень важные для качества магнита.Помимо проблем со стоимостью и доступностью, эти материалы вызывают также важные экологические, политические и этические вопросы, касающиеся их добычи, торговли и утилизации. По этим причинам огромные ресурсы вкладываются в исследования и разработки различных материалов и, особенно, в проект двигателей, которые сводят к минимуму использование постоянных магнитов [8] или позволяют использовать так называемые ферриты, т.е. керамические магнитные материалы, в которых используются менее проблемные материалы.
Электропитание через инвертор и управление
Негативным аспектом синхронных двигателей является невозможность их питания , просто подключив их к сети (Direct On-Line, DOL), как это происходит с асинхронными двигателями. Следовательно, для работы синхронных или реактивных двигателей с постоянными магнитами необходимо наличие «привода», то есть целого, состоящего из реального инвертора (чисто электронного силового привода), электронного контроллера и алгоритмов, реализованных в нем. Алгоритм управления, реализованный на цифровом устройстве, обновляется с частотой порядка 10 000 раз в секунду. Несмотря на дополнительную стоимость, стоит рассмотреть возможность изменения условий работы, в частности скорости, дает важные преимущества в нескольких приложениях (особенно в насосах и вентиляторах, где это позволяет значительно экономить энергию).
Следовательно, для работы синхронных или реактивных двигателей с постоянными магнитами необходимо наличие «привода», то есть целого, состоящего из реального инвертора (чисто электронного силового привода), электронного контроллера и алгоритмов, реализованных в нем. Алгоритм управления, реализованный на цифровом устройстве, обновляется с частотой порядка 10 000 раз в секунду. Несмотря на дополнительную стоимость, стоит рассмотреть возможность изменения условий работы, в частности скорости, дает важные преимущества в нескольких приложениях (особенно в насосах и вентиляторах, где это позволяет значительно экономить энергию).
Управляя инвертором в режиме ШИМ (широтно-импульсной модуляции), можно эффективно генерировать ряд напряжений, которые характеризуются амплитудой, частотой и произвольными фазами.
Поскольку в синхронных двигателях крутящий момент зависит от амплитуды тока и от его фазового соотношения с магнитной осью ротора, в алгоритмах управления обычно используется преобразование координат Парка, что приводит трехфазную систему к системе отсчета, интегральной с ось ротора (рис. 6).
6).
Рис. 6. Слева: двигатель градирни с прямым приводом, без защитного кожуха; справа — профиль заглушки пластин статора (справа) (сайт ABB-Baldor).
Знание положения ротора важно для управления синхронным двигателем. В некоторых приложениях, где не требуются особые характеристики управления, можно исключить механический датчик положения из-за его стоимости и снижения надежности. Фактически были разработаны «бессенсорные» методы управления, при которых положение ротора оценивается с использованием измерений тока и напряжения (внутри инвертора и в любом случае необходимо) и модели двигателя.
Бездатчиковые методы для синхронных двигателей, разработанные с девяностых годов, первоначально нашли применение только в некоторых конкретных случаях. В продуктах, которые в настоящее время называются «инверторами», то есть приводами общего назначения, первые алгоритмы этого типа были введены в конце 2000-х годов, и в последние годы они стали почти стандартным оборудованием. К сожалению, эти решения по-прежнему мало известны операторам автоматизации, даже если их применимость была продемонстрирована, особенно в таких обычных приложениях, как насосы и вентиляторы.
К сожалению, эти решения по-прежнему мало известны операторам автоматизации, даже если их применимость была продемонстрирована, особенно в таких обычных приложениях, как насосы и вентиляторы.
Поскольку данных, предоставленных производителем двигателя, часто недостаточно для калибровки всех параметров алгоритма управления, были разработаны методы «самостоятельного ввода в эксплуатацию», другими словами, ввод в эксплуатацию с минимальным вмешательством оператора. Первым шагом является автоматическая идентификация параметров («самоидентификация») методами, выполняемыми самим приводом, для перехода к реальной калибровке, то есть к выбору значений для параметров управления. И промышленность, и академический мир активно исследуют эти аспекты, с очень интересными предложениями также в итальянской сфере [10] — [14].
Детали конструкции
Как уже было сказано, самая большая разница между различными типами двигателей переменного тока в основном заключается в конструкции ротора . На самом деле, существуют различные случаи синхронных двигателей, предназначенных для сохранения других частей почти неизменными по сравнению с соответствующей асинхронной машиной (в конечном итоге с изменением витков обмотки). Такой подход распространился в последние несколько лет с целью удовлетворения общих приложений, а именно в качестве замены асинхронного двигателя.Помимо очевидных преимуществ в стоимости производства, использование эквивалентных деталей с точки зрения габаритных размеров, опор и точек внешнего крепления позволило использовать эти двигатели без изменения остальной механики. В этом отношении инновационные примеры представлены продуктами итальянских компаний, такими как серия синхронных двигателей с внутренними постоянными магнитами и реактивных двигателей, показанных на рис. 5.
На самом деле, существуют различные случаи синхронных двигателей, предназначенных для сохранения других частей почти неизменными по сравнению с соответствующей асинхронной машиной (в конечном итоге с изменением витков обмотки). Такой подход распространился в последние несколько лет с целью удовлетворения общих приложений, а именно в качестве замены асинхронного двигателя.Помимо очевидных преимуществ в стоимости производства, использование эквивалентных деталей с точки зрения габаритных размеров, опор и точек внешнего крепления позволило использовать эти двигатели без изменения остальной механики. В этом отношении инновационные примеры представлены продуктами итальянских компаний, такими как серия синхронных двигателей с внутренними постоянными магнитами и реактивных двигателей, показанных на рис. 5.
Рис. 4. Представление преобразования координат Парка в основе векторного управления.
В синхронных двигателях , особенно в двигателях с постоянными магнитами, можно реализовать большое количество полюсов со снижением скорости с тем же напряжением и увеличением крутящего момента с тем же током. Эту степень свободы в проекте можно сравнить по аналогии с использованием механического редуктора скорости и, следовательно, в некоторых приложениях она позволяет использовать соединение с прямым приводом, с некоторыми преимуществами с точки зрения эффективности, габаритных размеров, стоимости. , надежность и точность управления.Это решение в течение нескольких лет применялось в промышленных машинах (например, при производстве бумаги [14]), в секторе гражданских подъемников (лифты), в системах обработки воздуха (вентиляторы градирен, [15]) и в некоторая бытовая техника (в частности стиральные машины).
Эту степень свободы в проекте можно сравнить по аналогии с использованием механического редуктора скорости и, следовательно, в некоторых приложениях она позволяет использовать соединение с прямым приводом, с некоторыми преимуществами с точки зрения эффективности, габаритных размеров, стоимости. , надежность и точность управления.Это решение в течение нескольких лет применялось в промышленных машинах (например, при производстве бумаги [14]), в секторе гражданских подъемников (лифты), в системах обработки воздуха (вентиляторы градирен, [15]) и в некоторая бытовая техника (в частности стиральные машины).
В проекте, рассмотренном в [15], пакет статора (пластинки) использовался в качестве конструктивного элемента без добавления внешнего кожуха. На рис. 6 также представлена конструкция статора , ламинированная , где видно внешнее крыло для отвода тепла.Благодаря ограниченным по высоте габаритным размерам, этот двигатель устанавливается в основании градирни по оси с вентилятором, что позволяет избежать прямоугольной передачи и снижения скорости, которые вместо этого необходимы в традиционной конфигурации (с асинхронной мотор).
Приложения
Первые приложения в гражданском секторе синхронных двигателей с постоянными магнитами включают в себя системы кондиционирования из-за важности энергопотребления в этом случае.В холодильнике (как промышленном, так и бытовом) использование синхронных двигателей постепенно растет. Кроме того, частным случаем являются циркуляционные насосы для тепловых станций, которые из соображений эффективности в настоящее время почти полностью основаны на синхронных двигателях с постоянными магнитами в бессенсорном управлении.
Среди бытовой техники , в стиральных машинах использование этих типов двигателей стало обычным явлением в последние несколько лет. Использование синхронных двигателей вместо асинхронных или универсальных (со щетками) позволило, с одной стороны, уменьшить габаритные размеры и количество используемого материала, с другой стороны, улучшить управляемость, что также связано с принятием таких решений, как механическое соединение прямого привода. В последнем случае из-за ограничений габаритных размеров и необходимого крутящего момента ротор обычно внешний, а весь двигатель плоский и большого диаметра (рис. 7).
В последнем случае из-за ограничений габаритных размеров и необходимого крутящего момента ротор обычно внешний, а весь двигатель плоский и большого диаметра (рис. 7).
Рис. 7. Синхронный двигатель с постоянным магнитом и прямым приводом с внешним ротором (сайт LG).
Деталью производства машин этого типа, также как и других конкретных приложений, является обмотка на зубе (отдельная обмотка для каждого зуба статора).
В этом типе меньше простаивающих медных деталей, но становится сложнее проектировать машины с низкой пульсацией крутящего момента.Прямое соединение обеспечивает преимущества также с точки зрения работы в целом, облегчая идентификацию груза в резервуаре и его расположение в дополнение к регулированию скорости.
Из-за особого рабочего цикла стиральных машин, который включает в себя отжим-сушку, очень важна работа на высокой скорости (превышающей номинальную). Этот способ называется « дефлегмация », потому что, будучи напряжением, пропорциональным потоку и скорости, общий поток уменьшается с помощью подходящего управления, чтобы обеспечить работу на более высоких скоростях и фиксированном напряжении. В этом случае главными кандидатами являются синхронные двигатели с внутренними постоянными магнитами, поскольку их имеющийся крутящий момент не падает внезапно за пределы номинальной скорости.
В этом случае главными кандидатами являются синхронные двигатели с внутренними постоянными магнитами, поскольку их имеющийся крутящий момент не падает внезапно за пределы номинальной скорости.
Область, в которой синхронные двигатели получили широкое распространение, — это лифтов , особенно больших размеров. В этом случае также были реализованы специальные решения, такие как на рис. 8, позволяющие прямое движение нагрузки (без редуктора).
Рис. 8. Подъемная система для безредукторных лифтов с синхронным двигателем с постоянными магнитами и осевым потоком (сайт Kone).
В данном случае это осевой двигатель, то есть зазор между статором и ротором (магнитный зазор) пересекается силовыми линиями, параллельными оси.
Другие конкретные области применения включают возобновляемых источников (например, ветряная энергия) и авионики , где они преследуют цель «Больше электрических самолетов» (замена гидравлических или пневматических приводов). Использование высокоэффективных двигателей с высокой плотностью вращения также распространяется на тяговые машины , включая дорожную среду (от велосипедов до тяжелых транспортных средств и рабочих машин), железнодорожный / трамвайный сектор и промышленный сектор (вилочные погрузчики и т. Д.).
Использование высокоэффективных двигателей с высокой плотностью вращения также распространяется на тяговые машины , включая дорожную среду (от велосипедов до тяжелых транспортных средств и рабочих машин), железнодорожный / трамвайный сектор и промышленный сектор (вилочные погрузчики и т. Д.).
Библиография
- Уайлд, К. У. Бруннер, «Возможности политики в области энергоэффективности для систем с приводом от электродвигателей», Международное энергетическое агентство, Рабочий документ, 2011 г.
- «Электродвигатели и частотно-регулируемые приводы — Стандарты и законодательные требования по энергоэффективности низковольтных трехфазных двигателей», ZVEI — Zentralverband Elektrotechnik- und Elektronikindustrie eV, Division Automation — Electric Drive Systems, Франкфурт, декабрь 2010 г., 2-е издание .
- «Повышение рентабельности производства с помощью энергоэффективных приводов и двигателей», брошюра ABB, 2016 г.
- Вагати, «Синхронное реактивное сопротивление: новая альтернатива в приводах переменного тока», 20-я Международная конференция по промышленной электронике, управлению и КИП, 1994. IECON ’94., Болонья, 1994, стр. 1-13, том 1.
- Липо, Т. А., «Машины с синхронным сопротивлением — жизнеспособная альтернатива приводам переменного тока», Консорциум электрических машин и силовой электроники штата Висконсин, отчет об исследованиях, 1991.
- «Низковольтные двигатели для технологических процессов в соответствии с EU MEPS», каталог ABB, октябрь 2014 г.
- «Редкие земли», S. Geological Survey, Mineral Commodity Summaries, январь 2016 г.
- Гульельми, Б. Боаццо, Э. Армандо, Г. Пеллегрино и А. Вагати, «Минимизация магнитов в конструкции двигателя IPM-PMASR для применения в широком диапазоне скоростей», Конгресс и выставка IEEE Energy Conversion 2011, Феникс, Аризона, 2011, стр 4201-4207.
- «Технологии двигателей для повышения эффективности в приложениях — Обзор тенденций и приложений», Danfoss Power Electronics — Danfoss VLT drive PE-MSMBM, ноябрь 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Непрерывная самоидентификация характеристик потока для синхронных машин с сопротивлением с помощью новой аппроксимирующей функции насыщения и множественной линейной регрессии», в IEEE Transactions on Industry Applications, vol. 52, нет. 4, с. 3083-3092, июль-авг. 2016.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Самостоятельный ввод в эксплуатацию компенсации простоя инвертора с помощью множественной линейной регрессии на основе физической модели», IEEE Energy Conversion Congress and Exposition (ECCE), 2014, т., №, стр. 242–249, 14–18 сентября 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Аналитический расчет контура регулирования напряжения с ослаблением потока в приводах IPMSM», Конгресс и выставка по преобразованию энергии (ECCE) IEEE, 2015, том, №, стр. 6145-6152, 20-24 сентября 2015 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Анализ проблем проектирования и ошибок оценки основанного на обратной ЭДС устройства наблюдения за положением и скоростью для синхронных двигателей с SPM», в IEEE Journal of Emerging and Selected Topics in Power Electronics, vol.2, № 2, стр. 159–170, июнь 2014 г.
- S.A. Odhano, P. Giangrande, R. I. Bojoi и C. Gerada, «Самостоятельный ввод в эксплуатацию внутренних приводов синхронных двигателей с постоянными магнитами с подачей высокочастотного тока», в IEEE Transactions on Industry Applications, vol. 50, нет. 5, pp. 3295-3303, сентябрь-октябрь. 2014.
- Welin, C.-J. Фриман, «Новая система прямого привода открывает новую эру для бумагоделательных машин», Paper and Timber, Vol.83 / No. 5, 2001.
- МакЭлвин, К. Лайлс, Б. Мартин и В. Вассерман, «Надежность приводов градирни: повышение эффективности с помощью новых технологий двигателей», в журнале IEEE Industry Applications Magazine, vol.18, нет. 6, стр. 12-19, ноябрь-дек. 2012.
 IECON ’94., Болонья, 1994, стр. 1-13, том 1.
IECON ’94., Болонья, 1994, стр. 1-13, том 1.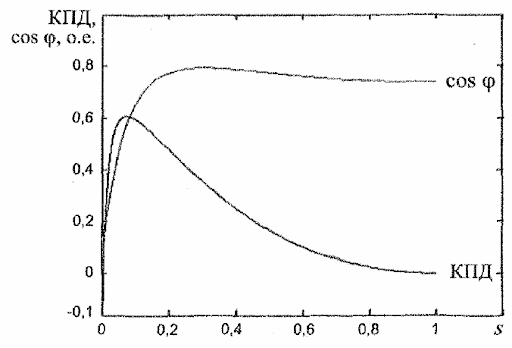 52, нет. 4, с. 3083-3092, июль-авг. 2016.
52, нет. 4, с. 3083-3092, июль-авг. 2016. 50, нет. 5, pp. 3295-3303, сентябрь-октябрь. 2014.
50, нет. 5, pp. 3295-3303, сентябрь-октябрь. 2014.Потери и КПД асинхронного двигателя
В трехфазном асинхронном двигателе возникают два типа потерь. Эти потери равны,
- Постоянные или фиксированные потери,
- Переменные потери.
Постоянные или фиксированные потери
Постоянные потери — это те потери, которые считаются постоянными в нормальном рабочем диапазоне асинхронного двигателя. Фиксированные потери можно легко получить, выполнив испытание трехфазного асинхронного двигателя без нагрузки.Эти потери далее классифицируются как:
- Потери в железе или сердечнике,
- Механические потери,
- Потери на трение в щетке.
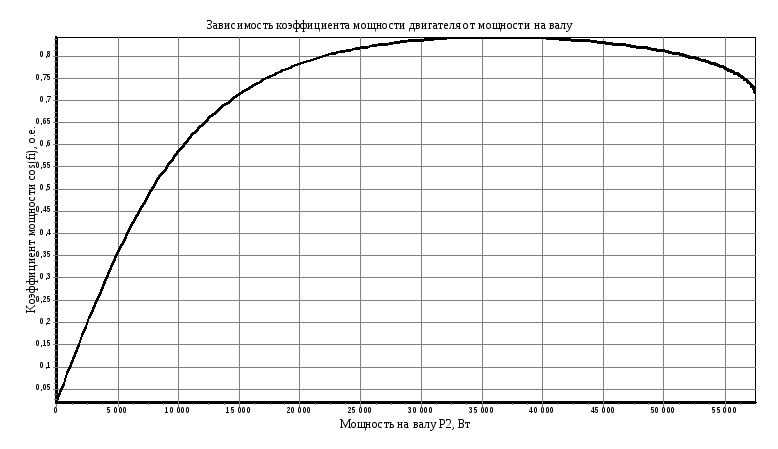
Потери в железе или сердечнике
Потери в железе или сердечнике дополнительно подразделяются на гистерезисные и вихретоковые потери. Потери на вихревые токи минимизированы за счет ламинирования сердечника. Поскольку при ламинировании сердечника площадь уменьшается и, следовательно, увеличивается сопротивление, что приводит к уменьшению вихревых токов. Потери на гистерезис минимизируются за счет использования высокосортной кремнистой стали.Потери в сердечнике зависят от частоты напряжения питания. Частота статора всегда равна частоте питания f, а частота ротора — это частота скольжения, умноженная на частоту питания (sf), которая всегда меньше частоты статора. Для частоты статора 50 Гц частота ротора составляет около 1,5 Гц, потому что в нормальных условиях работы скольжение составляет порядка 3%. Следовательно, потери в сердечнике ротора очень малы по сравнению с потерями в сердечнике статора, и обычно ими пренебрегают в рабочих условиях.
Механические потери и потери на трение щеток
Механические потери возникают в подшипнике, а потери на трение щеток возникают в асинхронном двигателе с фазным ротором. Эти потери равны нулю при запуске, и с увеличением скорости эти потери увеличиваются. В трехфазном асинхронном двигателе скорость обычно остается постоянной. Следовательно, эти потери почти остаются постоянными.
Эти потери равны нулю при запуске, и с увеличением скорости эти потери увеличиваются. В трехфазном асинхронном двигателе скорость обычно остается постоянной. Следовательно, эти потери почти остаются постоянными.
Переменные потери
Эти потери также называются потерями в меди. Эти потери возникают из-за протекания тока в обмотках статора и ротора. При изменении нагрузки ток, протекающий в обмотках ротора и статора, также изменяется, и, следовательно, эти потери также изменяются. Поэтому эти потери называют переменными потерями.Потери в меди получают путем проверки блокировки ротора трехфазного асинхронного двигателя. Основная функция асинхронного двигателя — преобразовывать электрическую мощность в механическую. Во время этого преобразования электрической энергии в механическую энергия проходит через разные стадии.
Эта мощность, протекающая через разные стадии, показана на диаграмме потока мощности. Как мы все знаем, вход трехфазного асинхронного двигателя — трехфазный.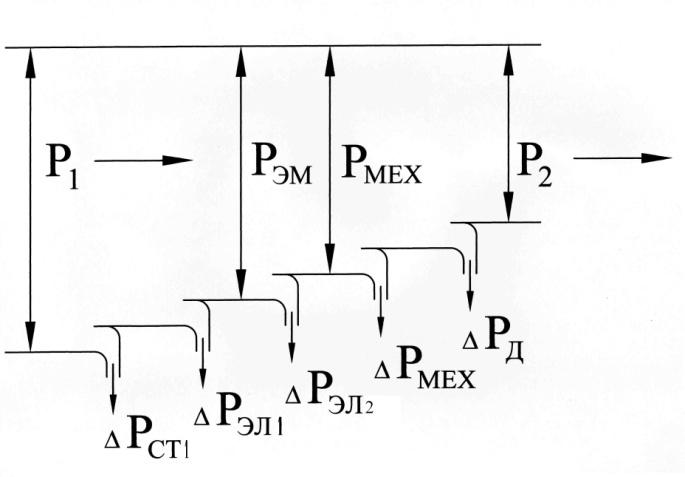 Таким образом, трехфазное питание подается на статор трехфазного асинхронного двигателя.
Таким образом, трехфазное питание подается на статор трехфазного асинхронного двигателя.
Пусть, P в = электрическая мощность, подаваемая на статор трехфазного асинхронного двигателя,
В L = линейное напряжение, подаваемое на статор трехфазного асинхронного двигателя,
I L = линейный ток,
Cosφ = коэффициент мощности трехфазного асинхронного двигателя.
Входная электрическая мощность на статор, P in = √3V L I L cosφ
Часть этой входной мощности используется для обеспечения потерь статора, которые включают потери в стали статора и потери в меди статора.Оставшаяся мощность (входная электрическая мощность — потери статора) поступает на ротор как входной поток.
Итак, вход ротора P 2 = P , в — потери статора (потери в меди статора и потери в стали статора).
Теперь ротор должен преобразовать эту входную мощность ротора в механическую энергию, но этот полный вход не может быть преобразован в механическую мощность, поскольку он должен обеспечивать потери ротора. Как объяснялось ранее, потери в роторе бывают двух типов: потери в стали ротора и потери в меди в роторе. Поскольку потери в железе зависят от частоты ротора, которая очень мала, когда ротор вращается, ею обычно пренебрегают.Таким образом, ротор имеет только потери меди в роторе. Следовательно, вход ротора должен обеспечивать эти потери меди в роторе. После подачи на ротор потерь меди оставшаяся часть входного сигнала ротора, P 2 , преобразуется в механическую энергию, P m .
Как объяснялось ранее, потери в роторе бывают двух типов: потери в стали ротора и потери в меди в роторе. Поскольку потери в железе зависят от частоты ротора, которая очень мала, когда ротор вращается, ею обычно пренебрегают.Таким образом, ротор имеет только потери меди в роторе. Следовательно, вход ротора должен обеспечивать эти потери меди в роторе. После подачи на ротор потерь меди оставшаяся часть входного сигнала ротора, P 2 , преобразуется в механическую энергию, P m .
Пусть P c — потери в меди в роторе,
I 2 — ток ротора в рабочем состоянии,
R 2 — сопротивление ротора,
P м — полная развиваемая механическая мощность.
P c = 3I 2 2 R 2
P m = P 2 — P c
Теперь эта механическая мощность передается нагрузке от вала, но иногда механические потери, такие как потери на трение и ветер. Таким образом, на эти потери должна подаваться общая выработанная механическая мощность. Следовательно, чистая выходная мощность, развиваемая на валу, которая в конечном итоге передается нагрузке, равна P из .
Таким образом, на эти потери должна подаваться общая выработанная механическая мощность. Следовательно, чистая выходная мощность, развиваемая на валу, которая в конечном итоге передается нагрузке, равна P из .
P out = P m — Механические потери (потери на трение и ветер).
P out называется мощностью на валу или полезной мощностью.
КПД трехфазного асинхронного двигателя
КПД определяется как отношение выходной мощности к входной,
КПД ротора трехфазного асинхронного двигателя,
= Полная развиваемая механическая мощность / входная мощность ротора
Трехфазная индукция КПД двигателя,
КПД трехфазного асинхронного двигателя
Повышение КПД асинхронного двигателя переменного тока с технологией постоянной частоты
Основные моменты
- •
В этом исследовании представлена технология управления постоянной скоростью.
- •
Кремниевый управляемый выпрямительный элемент (SCR) использовался для модуляции фазового угла.
- •
Предлагаемая теория управления эффективно сокращает ненужные траты энергии.
- •
Предложенная технология эффективно снизила общее потребление энергии на 12%.

Abstract
В этом исследовании предлагается метод управления постоянной частотой для повышения общей энергоэффективности асинхронного двигателя переменного тока с короткозамкнутым ротором, чтобы асинхронный двигатель мог поддерживать свое исходное рабочее состояние при низком потреблении энергии.В этом исследовании полупроводниковый компонент, кремниевый управляемый выпрямитель (SCR), использовался в качестве компонента для регулировки триггера фазы напряжения, и был разработан модуль управления постоянной частотой для запуска SCR посредством выходных сигналов.
Эксперимент регистрирует потребление энергии при работе с номинальным напряжением 0,47 кВтч за 4 цикла, а потребление энергии при операции регулировки напряжения составляет 0,402 кВтч.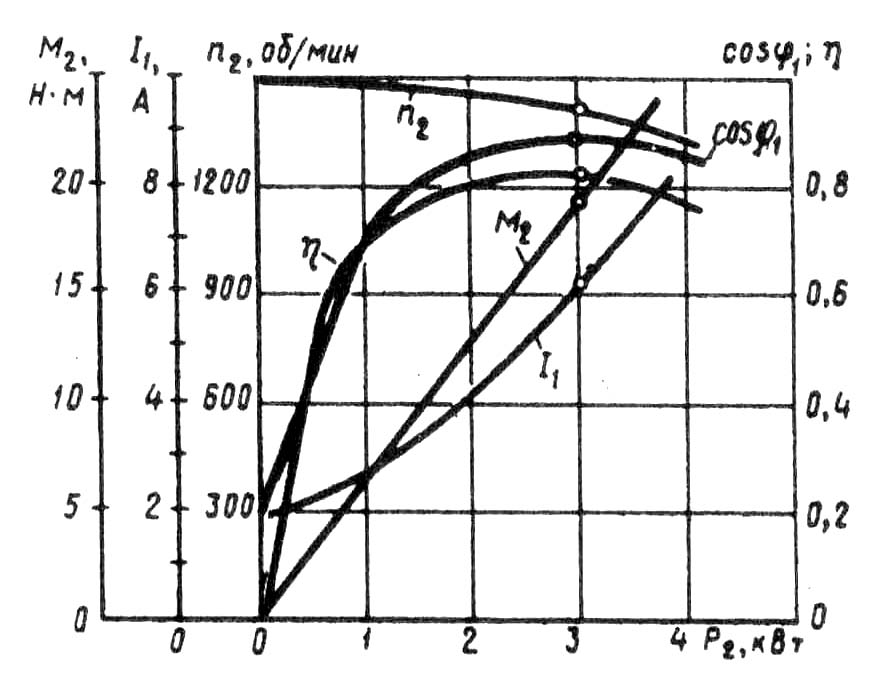 Расчетный показатель экономии энергии составляет около 12%. Кроме того, коэффициент мощности (PF) тестируемого асинхронного двигателя был увеличен с 0.44 до 0,53 при низкой нагрузке, которая увеличивается на 22,1%, в то время как PF общей низкой и высокой нагрузки увеличивается примерно на 12,9%. Это исследование улучшает эффект преобразования полной полной мощности (кВА) в активную мощность, чтобы проверить влияние энергосбережения на модуляцию входного напряжения асинхронного двигателя переменного тока с короткозамкнутым ротором.
Расчетный показатель экономии энергии составляет около 12%. Кроме того, коэффициент мощности (PF) тестируемого асинхронного двигателя был увеличен с 0.44 до 0,53 при низкой нагрузке, которая увеличивается на 22,1%, в то время как PF общей низкой и высокой нагрузки увеличивается примерно на 12,9%. Это исследование улучшает эффект преобразования полной полной мощности (кВА) в активную мощность, чтобы проверить влияние энергосбережения на модуляцию входного напряжения асинхронного двигателя переменного тока с короткозамкнутым ротором.
Ключевые слова
Напряжение
Управление фазой
Асинхронный двигатель с короткозамкнутым ротором
Потребление энергии
Энергосбережение
Рекомендуемые статьи Цитирующие статьи (0)
Полный текст
© 2019 Elsevier Ltd.Все права защищены.
Рекомендуемые статьи
Ссылки на статьи
КПД двигателя — обзор
Меры КПД
В идеале, управление энергопотреблением является наиболее экономически эффективным эффективным использованием энергии. Таким образом, эффективность — важное понятие для энергоменеджера. Эффективность можно рассматривать с точки зрения первого или второго законов термодинамики. Первый закон эффективности относится к преобразованию энергии из одной формы в другую и сохранению общего количества энергии без прямого учета качества энергии.При оценке общего использования топлива или форм энергии применяются соображения второго закона , поскольку они учитывают качество энергии и помогают определить верхние границы эффективности. Эффективность второго закона выражается величиной, известной как доступной работы .
Таким образом, эффективность — важное понятие для энергоменеджера. Эффективность можно рассматривать с точки зрения первого или второго законов термодинамики. Первый закон эффективности относится к преобразованию энергии из одной формы в другую и сохранению общего количества энергии без прямого учета качества энергии.При оценке общего использования топлива или форм энергии применяются соображения второго закона , поскольку они учитывают качество энергии и помогают определить верхние границы эффективности. Эффективность второго закона выражается величиной, известной как доступной работы .
В своей основной форме эффективность первого закона конкретной задачи можно представить как отношение полезной энергии, переданной задаче, к требуемой затраченной энергии. Однако есть много задач, для которых это базовое определение неадекватно или не подходит.Таким образом, возникли по крайней мере две другие широкие категории энергоэффективности. Здесь они называются «коэффициентами производительности» (COP) или коэффициентами эффективности использования энергии (EUPF).
Здесь они называются «коэффициентами производительности» (COP) или коэффициентами эффективности использования энергии (EUPF).
Пример : КПД электродвигателя. Каков КПД по первому закону однофазного электродвигателя мощностью 1 л.с., номинального напряжения 240 В, тока полной нагрузки 4,88 А и коэффициента мощности 80%? См. Ответ в уравнении 7.1. Обратите внимание, что мы используем энергию в единицу времени в этом уравнении и в уравнениях 7.С 2 по 7.4 ниже.
[7,1] η = поставленная полезная энергия (в данном случае «работа») Потребляемая энергия = л.с. × LF (# фазы) (В) (A) (pf) η = (1 л.с.) (0,746 кВт / л.с.) (1,0) (1) (240 В) (4,88 А) (0,8) (10−3 кВт / Вт) η = 0,796 = 80%
, где
η = КПД, безразмерный (или%)
л.с. = двигатель мощность, л.с.
LF = коэффициент нагрузки, безразмерный
# фаз = количество фаз двигателя, безразмерный
В = номинальное напряжение, В
24 ток полной нагрузки, A
pf = коэффициент мощности, безразмерный
Этот расчет показывает рабочий КПД 80%. Это верно для заявленных условий (т.е. при полной нагрузке и при коэффициенте мощности 80%). При работе с другими коэффициентами мощности или при нагрузке ниже полной КПД меньше. Коэффициент мощности остается довольно постоянным при номинальном значении полной нагрузки до тех пор, пока нагрузка не упадет ниже примерно 50–60%. Когда нагрузка падает примерно до одной трети полной нагрузки, коэффициент мощности может упасть до 20–30%.
Это верно для заявленных условий (т.е. при полной нагрузке и при коэффициенте мощности 80%). При работе с другими коэффициентами мощности или при нагрузке ниже полной КПД меньше. Коэффициент мощности остается довольно постоянным при номинальном значении полной нагрузки до тех пор, пока нагрузка не упадет ниже примерно 50–60%. Когда нагрузка падает примерно до одной трети полной нагрузки, коэффициент мощности может упасть до 20–30%.
В таблицах 7.1a и 7.1b показаны типичные значения КПД электродвигателя при полной нагрузке для двигателей премиум-класса. Обратите внимание, что стандарты NEMA и стандарты ЕС во многих случаях идентичны.Когда эти данные сравниваются с КПД двигателя в первом издании этой книги, КПД увеличился с 76–85,5% (1,0 л.с.) и с 91–95,4% (100 л.с.).
Таблица 7.1A. Номинальная эффективность при полной нагрузке: высокоэффективные электродвигатели NEMA премиум-класса
| ОТКРЫТАЯ РАМА | ЗАКРЫТАЯ РАМА | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| HP | 2 ПОЛЮСА | 4 ПОЛЮСА | 6 ПОЛЮСА | ||||||||
| 1 | 77. 0 0 | 85,5 | 82,5 | 77,0 | 85,5 | 82,5 | |||||
| 3 | 85,5 | 89,5 | 88,5 | 86,5 | 6
| 89,5 | 88,5 | 89,5 | 89,5 | ||
| 10 | 89,5 | 91,7 | 91,7 | 90,2 | 91,7 | 91.0 | |||||
| 30 | 91,7 | 94,1 | 93,6 | 91,7 | 93,6 | 93,0 | |||||
| 50 | 93,0 | 94,5 | 94,5 | 94,5 | 100 | 93,6 | 95,4 | 95,0 | 94,1 | 95,4 | 95,0 |
| 300 | 95,4 | 95,8 | 95,4 | .8 | 96,2 | 95,8 | |||||
Источник: NEMA MG-1 (2006) Таблица 12–12.
Таблица 7.1B. Высокий КПД двигателя IE3 Европейского Союза (3-фазные асинхронные двигатели)
| кВт | 2 полюса 50 Гц / 60 Гц | 4 полюса 50 Гц / 60 Гц | 6 полюсов 50 Гц / 60 Гц | ||
|---|---|---|---|---|---|
| 0,75 | 80,7 / 77,0 | 82,5 / 85,5 | 78,9 / 82,5 | ||
| 2,2 | 85. 9 / 86,5 9 / 86,5 | 86,7 / 89,5 | 84,3 / 89,5 | ||
| 7,5 | 90,1 / 90,2 | 90,4 / 91,7 | 89,1 / 91,0 | ||
| 22 | 6 922690,7 / 91,7 92,2 / 93,0 | ||||
| 37 | 93,7 / 93,0 | 93,9 / 94,5 | 93,3 / 94,1 | ||
| 75 | 94,7 / 94,1 | 95,0 / 95,4 | 9026 9025 9025 9025 9025 9025 9025 9025 9025 9025 9026 9025 9025 95,8 / 95.8 | 96,0 / 96,2 | 95,8 / 95,8 |
Источник: IEC 60034-30 (2009).
Как упоминалось выше, эффективность лучше всего при полной или близкой к ней нагрузке. Когда нагрузка на двигатель падает с полной нагрузки до менее чем 50%, КПД двигателя начинает падать, снижаясь до 40–80% при нагрузке всего 10–15%. Падение больше для небольших двигателей.
Это первое, что мы хотим подчеркнуть в этой главе: Эффективность обычно зависит от нагрузки .«Нагрузка», как здесь используется, может означать множество вещей: температуру, давление, силу, работу и т. Д.
Д.
Пример: Электрический резистивный нагреватель. Нагреватель рассчитан на 240 В и 4,167 А и выдает 3412 БТЕ в час. В чем его эффективность? Предположим, что коэффициент нагрузки равен 100%, а коэффициент мощности — 100%.
[7.2] η = полученная потребляемая энергия (в данном случае «тепло») потребляемая энергия = Q˙ × LF (V) (A) (pf) η = (3412Btu / h) (0,29307wh / Btu) (1.0) (240V) ( 4,167A) (1,0) η = 1,0 = 100%
, где
Q˙ = Тепло, отдаваемое за единицу времени, БТЕ / ч (или Вт)
. То есть электричество — доставляется к нагрузке в виде тепла.Очевидно, мы пренебрегли потерями, возникающими в процессе преобразования топлива в электричество, и любыми потерями, связанными с доставкой тепла к нагрузке (например, радиационными потерями, потерями в вентиляционных или дымовых трубах и т. Д.).
Это приводит ко второму пункту: Эффективность определяется только в определенных заданных границах системы .
Пример: Электрическая лампа накаливания. Лампа рассчитана на 100 Вт и 120 В. Это означает, что входная мощность составляет 100 Вт при полной нагрузке, то есть без затемнения.Световой поток — 1500 лм. Коэффициент преобразования люменов в ватт составляет 1,496 × 10 −3 Вт / люмен. Это дает следующий КПД лампы накаливания:
[7,3] η = потребляемая энергия (в данном случае «свет») Потребляемая энергия = лм × LFE˙inη = (1500 лм) (1,496 × 10−3 Вт / лм) (1,0) (100 Вт) η = 0,0224 = 2,24%
, где
лм = люмен, лм
E˙in = входная энергия, в данном случае мощность лампы, Вт
мера эффективности, так как отношение входной энергии к доставляемому свету неясно.Обычно используемым показателем является отношение светового потока в люменах к входной мощности в ваттах, которое называется эффективностью :
[7.4] Эффективность = 1500 лм 100 Вт = 15 лм / Вт
Эффективность является примером эффективности использования энергии. фактор; то есть фактор, который измеряет, как энергия используется для достижения конкретной цели производительности.
фактор; то есть фактор, который измеряет, как энергия используется для достижения конкретной цели производительности.
Пример: Оконный кондиционер. Этот прибор использует входную мощность 1000 Вт для обеспечения охлаждения 10 200 БТЕ / ч. Кондиционеры используют входную энергию (работу) для передачи тепла из области с более низкой температурой (внутреннее пространство) в область с более высокой температурой (снаружи), тем самым охлаждая внутреннее пространство.Тепловые насосы в режиме охлаждения работают так же, как кондиционеры, но в режиме обогрева они работают в обратном направлении. При обогреве тепловые насосы используют работу для передачи тепла от более низкой температуры на открытом воздухе к более высокой температуре внутреннего пространства.
Вместо использования символа η , который обычно используется для значений КПД в диапазоне от 0 до 1,0, один подход, используемый для представления КПД кондиционеров и тепловых насосов, заключается в определении коэффициента производительности (COP), определяемого как:
[7. 5] COP = Достигнутая производительность (т. Е. Количество произведенного нагрева или охлаждения) Потребляемая мощность (электричество) = Q˙E˙inCOP = (10 200 БТЕ / ч) (0,29307 Вт-ч / БТЕ) (1000 Вт) COP = 2,99
5] COP = Достигнутая производительность (т. Е. Количество произведенного нагрева или охлаждения) Потребляемая мощность (электричество) = Q˙E˙inCOP = (10 200 БТЕ / ч) (0,29307 Вт-ч / БТЕ) (1000 Вт) COP = 2,99
Коэффициенты производительности всегда больше единицы для тепловых насосов и может быть больше или меньше единицы для кондиционеров.
Другой подход к измерению производительности кондиционирования (или производительности тепловых насосов в режиме охлаждения) — это коэффициент энергоэффективности (EER), который аналогичен COP, но не безразмерен:
[7.6] EER = количество поставляемой охлаждающей жидкости (электричество в) EER = (10 200 БТЕ / ч) (1000 Вт) EER = 10,2 БТЕ / Втч = (COP) (3,412 БТЕ / Втч)
Еще одним показателем охлаждающей способности кондиционеров или тепловых насосов является сезонный коэффициент энергоэффективности (SEER), который представляет собой отношение общего количества тепла, отведенного в течение сезона охлаждения (Btu), к общему количеству электроэнергии, используемой в течение сезона охлаждения (Wh).
Кроме того, сезонный коэффициент производительности отопления (HSPF) является мерой производительности теплового насоса в режиме отопления.Это отношение общего объема отопления помещения, необходимого в течение отопительного сезона (БТЕ), к общему количеству электроэнергии, потребляемой в течение отопительного сезона (Втч).
Вот и все, что касается эффективности первого закона. Как видно из приведенных выше примеров, эффективность (как обычно используется) относится только к отношению работы или тепловой мощности по сравнению с затраченной энергией. Эта мера отражает количества задействованной энергии, но ничего не говорит о качестве .
Качество формы энергии является мерой ее способности выполнять полезную работу.Например, галлон масла имеет теплотворную способность примерно 148 МДж (140 000 британских тепловых единиц). Это примерно столько же энергии, сколько 1000 галлонов теплой воды, нагретой на 9 ° C (17 ° F) выше температуры окружающей среды. Хотя количество энергии в обоих случаях одинаково, способность масла выполнять полезную работу намного больше, чем способность теплой воды. Качество масла намного лучше.
Хотя количество энергии в обоих случаях одинаково, способность масла выполнять полезную работу намного больше, чем способность теплой воды. Качество масла намного лучше.
Доступность (также называемая доступная работа или exergy ) — это показатель, используемый для количественной оценки качества энергии.Он представляет собой максимальный объем доступной работы системы относительно эталонного состояния. Он также определяется как минимальная работа, необходимая для приведения системы из эталонного состояния в повышенное состояние. Для системы контрольной массы (например, поршня и цилиндра) доступность обозначается как непроточная доступность и может быть выражена следующим образом:
[7,7] млрд см = (U-U0) + P0 (V-V0 ) −T0 (S − S0) + mv22 + mgz
где:
B см = отсутствие потока, Дж
U = внутренняя энергия, Дж
P = давление, Па
V = объем, м 3
T = температура, K
S = энтропия,
/ K 940003 mv22 = кинетическая энергия, где м — масса (кг) и v — скорость (м / с), Дж
мгz = потенциальная энергия, где г — ускорение (м / с 2 ) силы тяжести и z — высота (м), J
и нижний индекс 0 относится к исходному состоянию
Для системы контрольного объема (например,g.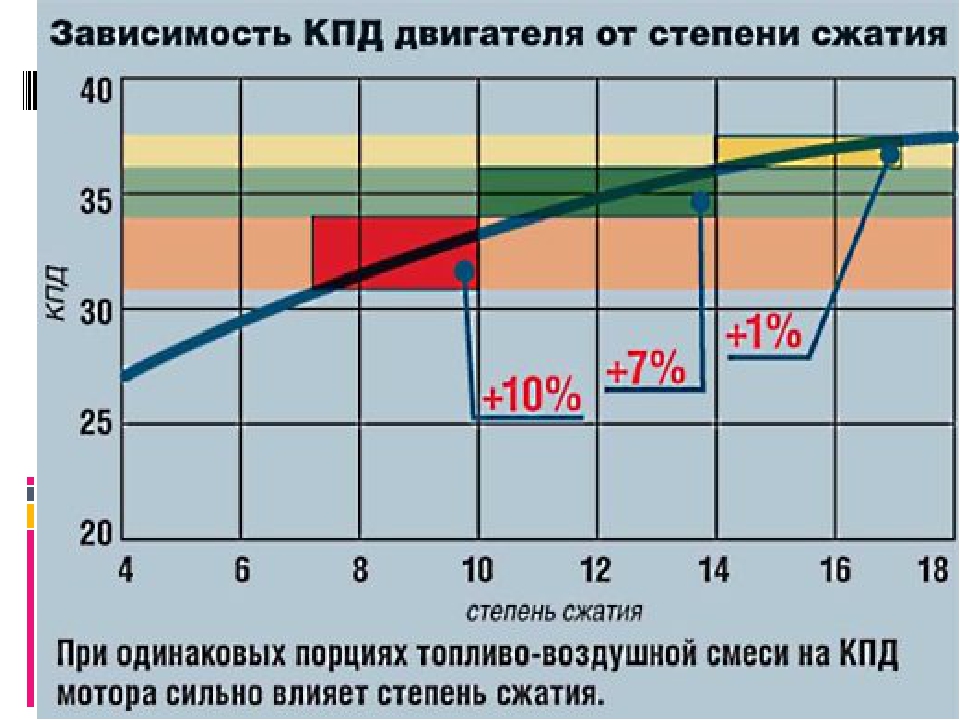 , турбина), доступность называется , доступность потока и может быть выражена следующим образом:
, турбина), доступность называется , доступность потока и может быть выражена следующим образом:
[7,8] Bcv = (H − H0) −T0 (S − S0) + mv22 + mgz
где:
B cv = доступность потока, Дж
H = энтальпия, Дж
Наличие потока имеет отношение ко многим термодинамическим циклам.
Для данной энергии, объема и состава системы B уменьшается по мере увеличения энтропии системы; B также уменьшается по мере приближения внутренней энергии или энтальпии системы к эталонному состоянию.(Обратите внимание, что во многих энергетических системах терминами кинетической и потенциальной энергии можно пренебречь.)
Применительно к углеводородному топливу B — это минимальная полезная работа, необходимая для образования топлива в данном состоянии из воды и углекислого газа. в атмосфере. Поскольку минимум — это также полезная работа обратимого процесса, B также представляет собой максимальную полезную работу, которая может быть получена путем окисления топлива и возврата продуктов в атмосферу.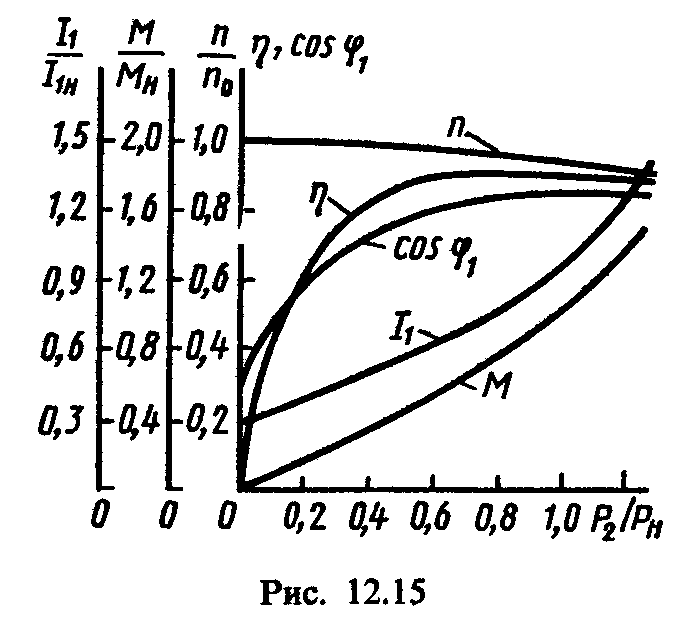
В относительном смысле качество (доступность) электроэнергии и топлива, такого как нефть, уголь и газ, довольно высокое.Точно так же пар под высоким давлением и высокой температурой имеет высокую доступность. И наоборот, горячая вода, низкотемпературное технологическое тепло или пар низкого давления имеют относительно низкую доступность.
Мера термодинамической эффективности (или второй закон эффективности) использования энергии для процесса может быть определена как отношение увеличения доступной работы, достигаемой продуктами в процессе, к максимально доступной полезной работе потребляемого топлива. . Другой способ определить это как отношение теоретического минимума доступной работы для выполнения задачи к фактической полезной работе, необходимой для выполнения задачи.Мы можем думать об этом как о доступности восстановленных , разделенных на доступность предоставленных . Разница между тем, что было поставлено, и тем, что было восстановлено, потеряно или уничтожены доступны. Таким образом, концепция доступности обеспечивает полезную меру эффективности, выходящую за рамки ограничений эффективности первого закона. Кроме того, анализ доступности помогает точно определить этапы процесса или области, в которых возможно повышение эффективности.
Таким образом, концепция доступности обеспечивает полезную меру эффективности, выходящую за рамки ограничений эффективности первого закона. Кроме того, анализ доступности помогает точно определить этапы процесса или области, в которых возможно повышение эффективности.
Пример: Паровой котел.Разница между популярными представлениями об эффективности и концепции эффективности иллюстрируется работой парового котла. Приемлемый котел — это котел, КПД которого составляет около 90%. То есть только 10% подводимой энергии рассеивается в дымовых газах или за счет потерь тепла. С точки зрения первого закона, мы можем быть удовлетворены эффективностью 90% и считаем, что делаем все возможное в соответствии с нынешними технологическими стандартами. Тем не менее, здесь не учитывается вопрос о том, максимально ли мы использовали топливо.Исходя из термодинамической доступности, этот «эффективный» работающий котел имеет КПД всего 40–45%, что указывает на ненужные потери работы при производстве пара. Для более полного обсуждения потерь в котле см. Главу 11 «Управление технологической энергией».
Для более полного обсуждения потерь в котле см. Главу 11 «Управление технологической энергией».
Теперь мы повторим анализ, выполненный в уравнениях 7.1, 7.2 и 7.5, на этот раз вычисляя эффективность, а не эффективность. В таблице 7.2 приведены результаты первого и второго закона эффективности для обычных процессов, использующих энергию.Читателю следует обратиться к литературе для более подробного обсуждения имеющихся работ.
Таблица 7.2. Эффективность первого и второго закона для устройств с одним источником и одним выходом
| Источник | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Работа E дюйм | Топливо: Теплота сгорания | Δ H | доступная работа B | Heat E 1 из горячего резервуара при T 1 | |||||||
| Конечное использование | |||||||||
1.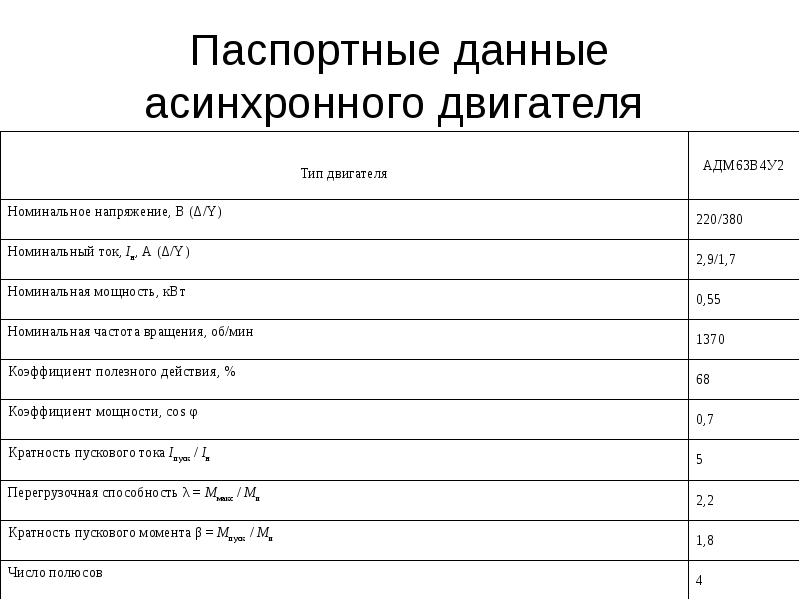 | 2. | 3. | |||||||
| Работа | η = Eout / Ein | η = Eout / | ΔH | | η = Eout / E1 | ||||||
| E out | ∈ = η | ∈ = EoutB (≃η) | ∈ = η1- (t0 / T1) | 11 (t0 / T1) | 119 ( | 11 | 11 9 например, электродвигатель) | (например, электростанция) | (например, геотермальная установка) |
| Heat E 2 добавлен в теплый резервуар при T 2 | 4. | 5. | 6. | ||||||
| η (COP) = E2 / Ein∈ = η (1 − T0T2) | η (COP) = E2 / | ΔH | ∈ = E2B (1 − T0T2) | η (COP) = E2 / E1∈ = η1− (T0 / T2) 1− (T0 / T1) | |||||||
| (например, тепловой насос с электрическим приводом) | (например, тепловой насос с приводом от двигателя) | (например, , печь) | |||||||
| Тепло E 3 отводится из охлаждающего резервуара при T 3 | 7.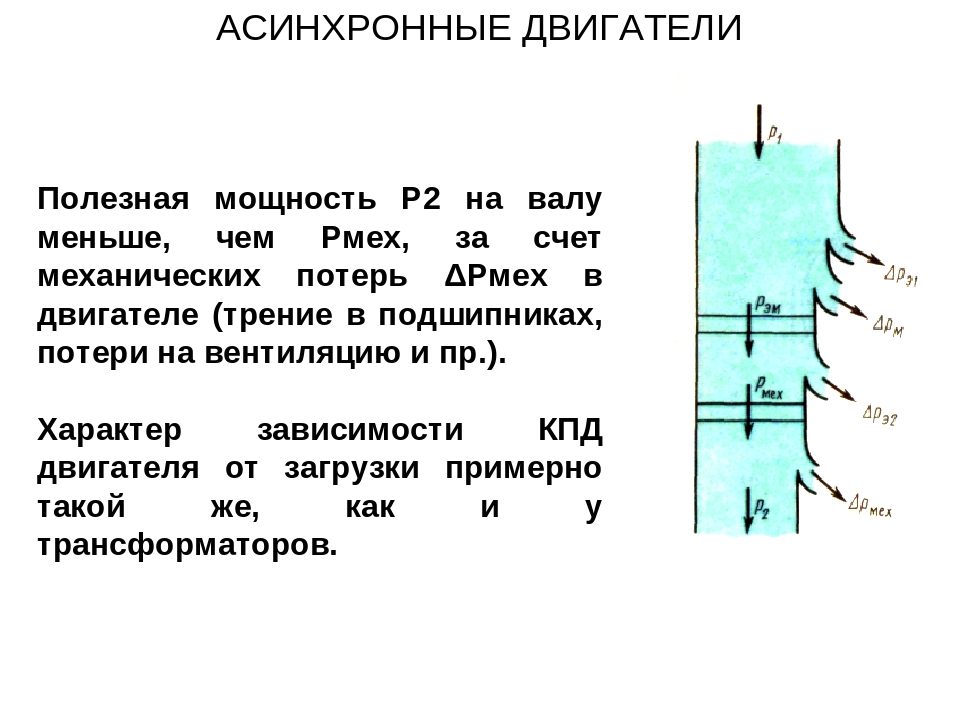 | 8. | 9. | ||||||
| η (COP) = E3 / Ein∈ = η (T0T3−1) | η (COP) = E3 / | ΔH | ∈ = E3B (T0T3−1) | η (COP) = E3 / E1∈ = η (T0 / T3) −11− (T0 / T1) | |||||||
| (напр.г., электрический холодильник) | (например, газовый кондиционер) | (например, абсорбционный холодильник) | |||||||
Для электродвигателя. Мы исходим из предположения, что эффективность определяется у источника электроэнергии и не включает производство и доставку электроэнергии. В данном случае
[7.9] ϵ = Эффективность = WorkdeliveredEnergyin, Ein = η = 80%
Это тот же результат, что и раньше. Если бы мы вместо этого определили знаменатель как максимальную доступную энергию в основном топливе, используемом для выработки электроэнергии, эффективность была бы ниже из-за потерь при генерации, передаче и распределении.
Для резистивного нагревателя. Предположим, обогреватель подает теплый воздух с температурой 43 ° C (316 K) в дом с температурой наружного воздуха 0 ° C (273 K). Доступная полезная переданная работа определяется как:
Доступная полезная переданная работа определяется как:
[7.10] W˙rev = Q˙ (1 – T0T2)
, где:
W˙rev = теоретическая максимальная доступная работа теплового двигателя, работающего между двумя нагревами. перекачивающие резервуары в реверсивном цикле, Вт
Q˙ = тепловая мощность нагревателя, 3412 БТЕ / ч или 1000 Вт
T 0 = температура радиатора, 0 ° C или 273 K
T 2 = температура теплого резервуара, 43 ° C или 316 K
Максимально возможная работа, которую можно с пользой переносить для той же функции с тем же входом энергии, составляет 240 В × 4.167 A = 1000 Вт, опять же при условии, что эффективность определяется у источника электроэнергии и не включает производство электроэнергии. Таким образом, эффективность составляет:
[7,11] ϵ = W˙revE˙in = Q˙ (1 – T0T2) E˙in = η (1 − T0T2) ϵ = 100% (1−273K316K) = 13,6%
Это показывает что потеря доступной работы является результатом использования высококачественной высокотемпературной формы энергии (электричества) для производства низкотемпературного тепла. Эффективность была бы намного выше (около ϵ = 68%), если бы T 2 было ближе к 600 ° C.Эффективность также была бы выше, если бы это был тепловой насос, а не резистивный нагреватель. В этом случае ϵ будет равно (1– T 0 / T 2 ), умноженному на COP, который обычно составляет порядка 3,0.
Эффективность была бы намного выше (около ϵ = 68%), если бы T 2 было ближе к 600 ° C.Эффективность также была бы выше, если бы это был тепловой насос, а не резистивный нагреватель. В этом случае ϵ будет равно (1– T 0 / T 2 ), умноженному на COP, который обычно составляет порядка 3,0.
Для кондиционера. Фактический КПД кондиционера составляет 2,99. В типичных погодных условиях жаркого летнего дня его эффективность определяется выражением:
[7.12] ϵ = W˙revE˙in = Q˙ | 1 − T0T3 | E˙in = COP (T0T3−1) ϵ = 2,99 (313K293K− 1) = 20.4%
где:
T 0 = температура радиатора, 40 ° C или 313 K
T 3 = температура охлаждающего резервуара, 20 ° C или 293 K
Это означает, что эффективность второго закона или эффективность кондиционера низка, когда температура наружного воздуха близка к температуре кондиционируемого помещения. Еще раз, поскольку электричество с высокой доступностью используется для охлаждения помещения с небольшим перепадом температур по сравнению с окружающей средой (и, следовательно, с низкой доступностью для работы), имеется значительная потеря доступной работы (текстовое поле 7.1).
Еще раз, поскольку электричество с высокой доступностью используется для охлаждения помещения с небольшим перепадом температур по сравнению с окружающей средой (и, следовательно, с низкой доступностью для работы), имеется значительная потеря доступной работы (текстовое поле 7.1).
Текстовое поле 7.1
Предупреждение уместно в отношении интерпретации концепции теоретической минимальной требуемой энергии. Теоретически автомобиль, движущийся из Денвера в Лос-Анджелес, не должен использовать топливо и фактически должен давать полезную энергию (из-за разницы в высоте). Таким образом, хотя теоретический минимум является полезным понятием для оценки потенциала экономии топлива, нет никаких указаний на то, что достижение такой цели практически или даже возможно.
Повышение энергоэффективности с помощью инновационных двигателей
Новые и все более строгие стандарты эффективности сделали эффективность двигателей приоритетной среди производителей двигателей и разработчиков систем с двигателем. В то время как Закон об энергетической независимости и безопасности 2010 года требовал повышения эффективности до полной нагрузки в США, будущее законодательство находится на рассмотрении, которое потребует более высокой эффективности даже при частичной нагрузке и скорости. В результате автомобильная технология должна продолжать совершенствоваться, чтобы соответствовать стандартам эффективности, предлагаемым агентствами по регулированию энергетики.Однако в нынешних экономических условиях конечные пользователи также ищут более быстрые решения для повышения эффективности системы двигателей и снижения затрат на электроэнергию.
В то время как Закон об энергетической независимости и безопасности 2010 года требовал повышения эффективности до полной нагрузки в США, будущее законодательство находится на рассмотрении, которое потребует более высокой эффективности даже при частичной нагрузке и скорости. В результате автомобильная технология должна продолжать совершенствоваться, чтобы соответствовать стандартам эффективности, предлагаемым агентствами по регулированию энергетики.Однако в нынешних экономических условиях конечные пользователи также ищут более быстрые решения для повышения эффективности системы двигателей и снижения затрат на электроэнергию.
Обзор привода и предостережение
В некоторых приложениях значительная экономия энергии достигается за счет использования частотно-регулируемых приводов (VFD). ЧРП позволяет регулировать скорость двигателя в соответствии с конкретными эксплуатационными требованиями. Обычно двигатель работает на более низком уровне мощности для экономии энергии. Например, частотно-регулируемый привод можно использовать для снижения скорости двигателя конвейера или вентилятора на 20% в непиковые часы, что снижает энергопотребление на 50%.
Например, частотно-регулируемый привод можно использовать для снижения скорости двигателя конвейера или вентилятора на 20% в непиковые часы, что снижает энергопотребление на 50%.
Однако простое применение частотно-регулируемого привода к двигателю не улучшает его эффективность. Двигатель с КПД 89% в лучшем случае будет КПД 89% при работе с частотно-регулируемым приводом. Фактически, эффективность системы немного снизится, потому что большинство частотно-регулируемых приводов имеют эффективность только от 95% до 97% (а не на 100%). В большинстве случаев пониженное потребление энергии двигателем компенсирует это падение эффективности системы.Однако для дальнейшего повышения производительности системы необходимо усовершенствовать сам двигатель. Существует ряд стратегий для повышения эффективности двигателя. Рассмотрим обычный асинхронный двигатель.
КПД за пределами паспортной таблички
На паспортных табличках всех асинхронных двигателей указан коэффициент полезного действия. «КПД на паспортной табличке» определяется для номинального значения двигателя и зависит от конструкции и выходной мощности. Большинство эффективных асинхронных двигателей NEMA Premium обеспечивают эффективность, указанную на паспортной табличке, близкую к уровням, определенным в стандарте NEMA MG-1.
«КПД на паспортной табличке» определяется для номинального значения двигателя и зависит от конструкции и выходной мощности. Большинство эффективных асинхронных двигателей NEMA Premium обеспечивают эффективность, указанную на паспортной табличке, близкую к уровням, определенным в стандарте NEMA MG-1.
Обычно КПД двигателя достигает пика при номинальном значении двигателя и снижается при отклонении рабочей скорости или нагрузки от номинального значения. Например, двигатель вентилятора NEMA Premium мощностью 5 л.с. может иметь КПД 89,5% при работе на 1800 об / мин. Если скорость вентилятора уменьшается вдвое, КПД двигателя падает ниже 80%.
При этом КПД асинхронного двигателя может составлять
быть увеличенным несколькими элементами дизайна. Один из подходов заключается в использовании более тонких пластин в стопке ротора, хотя для достижения той же выходной мощности требуется больше пластин.Другой метод — использовать листы электротехнической стали более высокого качества с улучшенной изоляцией.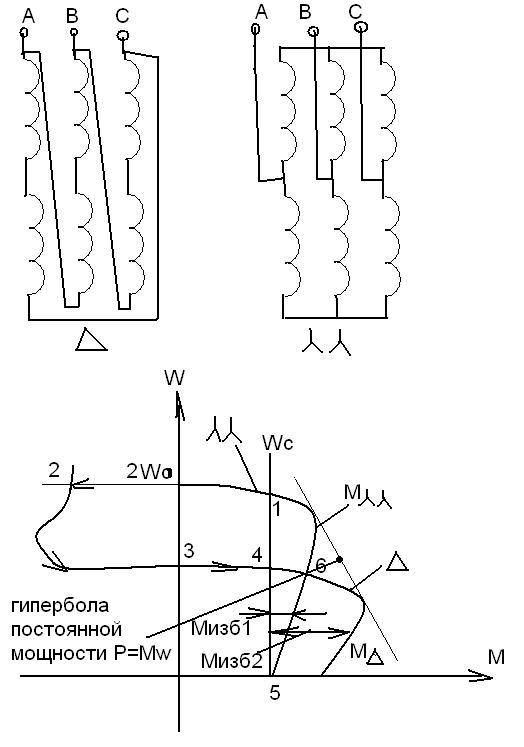 Оба этих подхода дороги.
Оба этих подхода дороги.
Эффективность также можно повысить, если использовать в двигателе больше медной проволоки. Как правило, длина ротора и статора увеличивается, что приводит к увеличению длины двигателя. Например, традиционный 3-сильный двигатель Premium с эффективностью 1800 об / мин может быть как минимум на два дюйма длиннее стандартной конструкции. Поддержание высокого КПД при более короткой конструкции возможно, но часто увеличивает стоимость двигателя на 30% и более.
Другие подходы к повышению эффективности двигателя включают использование меди вместо стали для конструкции ротора, использование меньших подшипников для уменьшения трения (хотя грузоподъемность уменьшается) и использование охлаждающих вентиляторов меньшего размера для уменьшения трения.
С учетом синхронных двигателей
Синхронные двигатели являются альтернативой асинхронным двигателям, где требуется более высокий КПД двигателя в широком рабочем диапазоне. Для приложений, в которых двигатель часто работает на скоростях и нагрузках, отклоняющихся от номинальной, широкий диапазон высокого КПД синхронного двигателя обеспечивает значительную экономию энергии по сравнению с традиционным асинхронным двигателем.
Короче говоря, в синхронных двигателях используется особая конструкция ротора, которая позволяет ему вращаться синхронно с полем статора. В отличие от этого, в традиционном асинхронном двигателе ротор отстает или «проскальзывает» за полем вращающегося статора.
Существуют два типа синхронных двигателей — реактивные реактивные и постоянные магниты. Типы с переключаемым сопротивлением имеют выступающие полюса в роторе, образованные выемками или «зубцами» в литом роторе из цельной стали. Эти выемки позволяют ротору «заблокироваться» и работать с той же скоростью, что и вращающееся магнитное поле.Импульсные реактивные электродвигатели могут быть меньше, чем асинхронные электродвигатели NEMA Premium, обеспечивающие сопоставимую мощность из-за меньшего воздушного зазора ротора и более высоких уровней магнитного потока, проходящего через сталь ротора. К недостаткам этой конструкции относятся более высокие уровни вибрации, вызванные повышенными магнитными пульсациями, и более высокая стоимость из-за специальной стали ротора.
Двигатели с постоянными магнитами также известны как
.
s Электродвигатели с постоянным магнитом с электронной коммутацией или бесщеточные двигатели постоянного тока (BLDC).Как следует из названия, его ротор включает постоянные магниты — либо установленные на поверхности ротора, либо вставленные в узел ротора. Для последнего двигатель называется двигателем с внутренним постоянным магнитом.
Постоянные магниты выполняют ту же функцию, что и выступающие полюсы, и поэтому предотвращают скольжение. Поскольку магнитное поле ротора не индуцируется электрически, как в асинхронном двигателе, двигатели с постоянными магнитами по своей природе более энергоэффективны. Редкоземельные магниты (неодим, самарий-кобальт) обеспечивают самый высокий магнитный поток, что позволяет создавать компактные двигатели с постоянными магнитами с отличным уровнем эффективности.Однако эти редкоземельные магниты очень дороги.
Достижения в технологии бесщеточных двигателей с постоянными магнитами привели к созданию двигателей, которые значительно более эффективны в широком рабочем диапазоне, чем широко распространенные конструкции асинхронных двигателей переменного тока, но при этом являются рентабельными.
Расчет эксплуатационных расходов
Конечные пользователи все чаще смотрят на реальную стоимость владения электродвигателем, а не просто на цифру в долларах за л.с.Это более широкое представление включает стоимость электроэнергии, потребляемой оборудованием в течение срока его полезного использования, и факторы, позволяющие значительно снизить эти затраты за счет более эффективных систем. Обычно покупная цена и затраты на обслуживание составляют только 3% от общей стоимости владения двигателем и его питания, тогда как затраты на электроэнергию в течение срока службы двигателя составляют остальные 97%.
Чтобы проиллюстрировать потенциальную экономию в течение срока службы двигателя, рассмотрим упрощенное приложение с регулируемой скоростью с двигателем мощностью 3 л.с. и 1800 об / мин, работающим со стандартной конвейерной лентой или вентилятором.Предположим, что двигатель работает половину времени на 100% скорости при 100% нагрузке и половину времени на 50% скорости при 25% нагрузке. В этом случае стоимость питания бесщеточного двигателя с постоянными магнитами, описанного во врезке (см. «Пример: конструкция конического двигателя»), будет снижена примерно на 10% по сравнению с асинхронным двигателем NEMA Premium. Срок окупаемости в таких случаях зачастую составляет менее одного года.
В этом случае стоимость питания бесщеточного двигателя с постоянными магнитами, описанного во врезке (см. «Пример: конструкция конического двигателя»), будет снижена примерно на 10% по сравнению с асинхронным двигателем NEMA Premium. Срок окупаемости в таких случаях зачастую составляет менее одного года.
Для получения дополнительной информации звоните (510) 933-2700 или посетите сайт novatorque.com. Щелкните здесь, чтобы узнать больше о EISA.
Показательный пример: Коническая конструкция двигателя
Один двигатель с более высоким КПД, не использующий редкоземельные магниты, может похвастаться КПД, намного превышающим требования стандартов NEMA Premium. В диапазоне от 3 до 5 л.с. двигатель достигает пикового КПД, превышающего 92% (по сравнению с NEMA Premium 89,5%), и сохраняет КПД выше 90% в широком диапазоне скоростей и нагрузок.
В этом двигателе две конические ступицы установлены на валу ротора на противоположных концах осевого статора с дополнительной конической торцевой поверхностью. Эта геометрия ротор-статор увеличивает площадь поверхности для взаимодействия магнитного поля по сравнению с традиционными интерфейсами ротор-статор. Следовательно, в двигателе можно использовать легко доступные ферритовые магниты вместо более дорогих редкоземельных магнитов. Ступицы ротора содержат конфигурацию внутреннего постоянного магнита (IPM), в которой магниты механически удерживаются внутри ступицы.
Эта геометрия ротор-статор увеличивает площадь поверхности для взаимодействия магнитного поля по сравнению с традиционными интерфейсами ротор-статор. Следовательно, в двигателе можно использовать легко доступные ферритовые магниты вместо более дорогих редкоземельных магнитов. Ступицы ротора содержат конфигурацию внутреннего постоянного магнита (IPM), в которой магниты механически удерживаются внутри ступицы.
Этот двигатель, разработанный и произведенный NovaTorque Inc., Фремонт, Калифорния, также повышает надежность за счет минимизации воздействия тепла, выделяемого внутри двигателя.Двигатель питается от частотно-регулируемого привода, который генерирует сигнал переменного тока для управления двигателем с использованием синусоидальной формы волны.
Осевая конструкция поддерживает поток магнитного потока параллельно валу, что позволяет наматывать катушки вокруг полюсных наконечников статора. Наружные поверхности катушек расположены рядом с корпусом двигателя и создают эффективный тепловой путь для отвода тепла от катушек. Наконец, сталь с ориентированной зернистостью в осевом статоре снижает потери на вихревые токи, что еще больше повышает эффективность двигателя.
Наконец, сталь с ориентированной зернистостью в осевом статоре снижает потери на вихревые токи, что еще больше повышает эффективность двигателя.
Двигатели для повышения эффективности: сравнение двигателей с постоянными магнитами, реактивных и асинхронных двигателей
Продолжение заголовков о сверхэффективных электроприводах может заставить некоторых наблюдателей задуматься о будущем трехфазных асинхронных двигателей.Правда в том, что асинхронные двигатели никуда не денутся. Фактически, они продолжают совершенствоваться, поскольку улучшенные материалы продолжают делать возможными более эффективные конструкции.
Правительственное законодательство поддерживает эти усилия: в США в 2010 году вступил в силу EISA (Закон об энергетической независимости и безопасности), требующий более высоких стандартов эффективности для трехфазных промышленных двигателей общего назначения от 1 до 500. л.с. изготовлен для бытового использования. В Европе действуют аналогичные правила.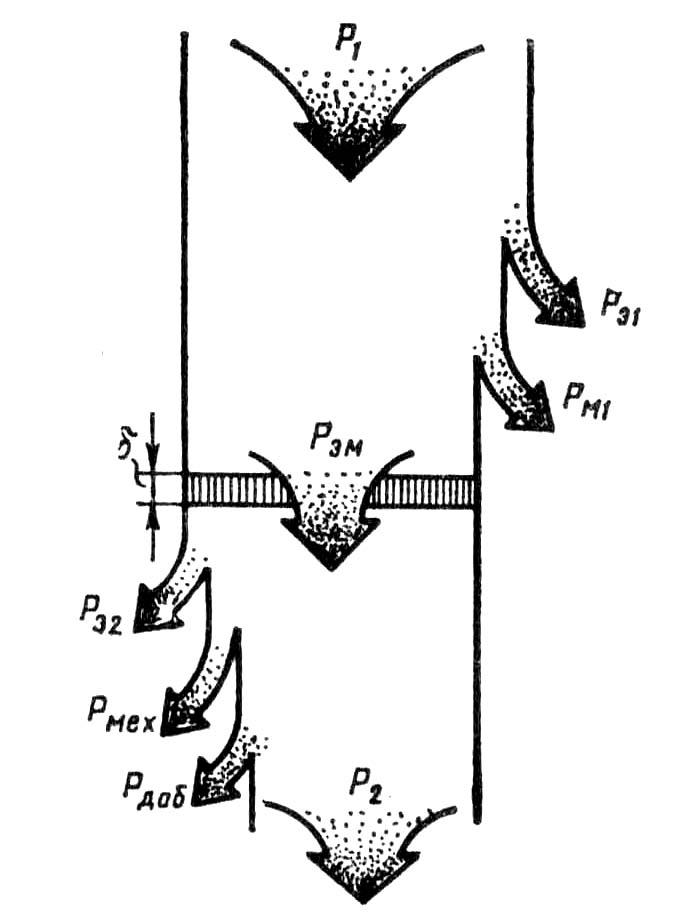 По состоянию на июнь 2011 года в ЕС разрешены только двигатели с классом эффективности IE2 (международный КПД), что на 7% выше по сравнению со старыми конструкциями IEC. К 2017 году там будут разрешены только двигатели с классом эффективности IE3. Эти двигатели имеют КПД до 10% выше, чем у старых моделей IEC, и уже имеют экономический смысл из-за их высокого потенциала энергосбережения.
По состоянию на июнь 2011 года в ЕС разрешены только двигатели с классом эффективности IE2 (международный КПД), что на 7% выше по сравнению со старыми конструкциями IEC. К 2017 году там будут разрешены только двигатели с классом эффективности IE3. Эти двигатели имеют КПД до 10% выше, чем у старых моделей IEC, и уже имеют экономический смысл из-за их высокого потенциала энергосбережения.
Однако в какой-то момент срабатывает закон убывающей отдачи. С двигателями, работающими в диапазоне КПД 90% плюс для большинства номиналов, больше возможностей для улучшения не существует.
Законы физики запрещают проектировать асинхронные двигатели переменного тока с более высоким КПД.
Именно здесь начинают иметь смысл альтернативные конструкции двигателей. В качестве одного из примеров рассмотрим технологию ротора с постоянными магнитами (PM). В отличие от асинхронных двигателей, которые создают вторичное магнитное поле в роторе, в двигателях с постоянными магнитами используются высокопроизводительные магниты ротора для создания постоянного магнитного поля. Это устраняет потери I2R (тепла) ротора вторичного контура, обнаруживаемые в конструкции асинхронного двигателя, что приводит к более высокому КПД и лучшему коэффициенту мощности для загрузки.
Это устраняет потери I2R (тепла) ротора вторичного контура, обнаруживаемые в конструкции асинхронного двигателя, что приводит к более высокому КПД и лучшему коэффициенту мощности для загрузки.
Рейтинг по номиналу, технология ротора с постоянными магнитами просто более эффективна, чем индукционная технология. Итак, скоро ли двигатели с постоянными магнитами полностью заменят индукционные конструкции? Большинство отраслевых экспертов думают, что нет.
Решающим фактором являются стоимость и окупаемость. В промышленной сфере окупаемость сводится к экономии энергии. В новейшей технологии ротора с постоянными магнитами используются редкоземельные магниты на основе неодима, которые обеспечивают как высокоэнергетический продукт, так и рабочие характеристики при высоких температурах. Однако не секрет, что Китай сейчас контролирует большую часть мировых поставок неодима, повышает цены на магниты и ограничивает продажи.Более высокая цена делает целесообразным для большего числа стран, включая США, Австралию, Южную Африку и Канаду, открывать шахты и перерабатывающие предприятия, что в конечном итоге приведет к усилению конкуренции за магниты.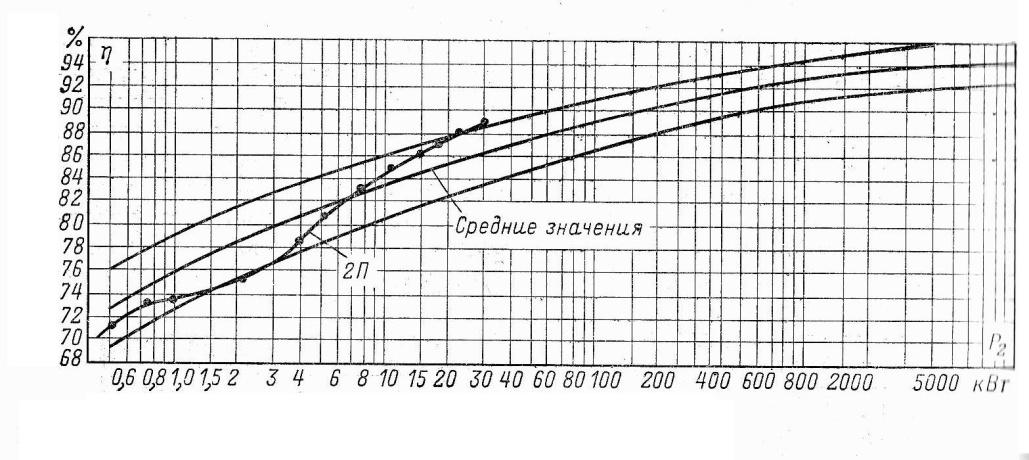
Помимо индукционных конструкций
Спрос на более эффективные двигатели будет сохраняться по мере роста спроса на электроэнергию во всем мире. Как будет выглядеть сверхэффективный двигатель будущего, остается только гадать.
«Двигатель, КПД которого на три-четыре диапазона выше, чем у современных (асинхронных) двигателей премиум-класса, скорее всего, будет гибридным», — говорит Ричард Шефер, старший менеджер по маркетингу продукции с регулируемой частотой вращения, Baldor Electric Co., Форт-Смит, штат Арканзас. «Он будет включать в себя индукционную клетку для запуска и постоянные магниты для высокоэффективной работы и работы с истинной синхронной скоростью. Этот будущий гибрид может иметь индукционную структуру с короткозамкнутым ротором или конструкцию с синхронным сопротивлением, усиленную технологией постоянных магнитов. Такая конструкция двигателя может в конечном итоге заменить современные асинхронные двигатели ».
Разрабатываются и другие конфигурации двигателей, каждая из которых имеет свои особые преимущества, недостатки и области применения.Двигатели с сегментированными статорами, концентрированными обмотками, медными роторами, роторами с явнополюсными роторами, сплошными роторами и гибридными двигателями либо находятся в производстве, либо предлагаются. «Лучшая» конструкция будет наиболее точно соответствовать требованиям приложения по эффективности, крутящему моменту, скорости и стоимости.
Интересно изучить некоторые из наиболее широко обсуждаемых проектов, используемых сегодня. В одной такой конструкции используется переключаемое сопротивление. В конструкциях с переключаемым сопротивлением импульсы тока используются для создания крутящего момента и вращения.Их статор содержит обмотки, но ротор не имеет магнитов или обмоток. Изготовлен из магнитомягкого материала (выступы из многослойной стали). При включении статора в зубцах ротора индуцируются магнитные полюса. Магнитное сопротивление ротора создает силу, которая пытается выровнять ротор с обмотками, на которые подается питание. Для поддержания вращения соседние обмотки последовательно включаются.
Для поддержания вращения соседние обмотки последовательно включаются.
Реактивные электродвигатели
имеют меньше полюсов ротора, чем полюсов статора, поэтому полюса не могут быть совмещены одновременно, а это положение не может генерировать крутящий момент.Напротив, связанная технология, называемая синхронным реактивным двигателем, имеет равное количество полюсов статора и ротора. Зубья ротора расположены так, что создают внутренние «барьеры» для магнитного потока, отверстия, которые направляют магнитный поток вдоль так называемой прямой оси. В любом случае ротор работает с синхронной скоростью, и в роторе нет токопроводящих частей, поэтому потери ротора минимальны по сравнению с потерями в асинхронном двигателе.
Может быть непросто провести сравнительный анализ эффективности различных двигателей.Эффективность до некоторой степени зависит от качества формы сигнала управляющего тока. Было бы идеально сделать это на основе чисто синусоидальных сигналов. К сожалению, это невозможно, потому что некоторые конструкции всегда питаются от инверторов, выходы которых обычно характеризуются большим количеством высокочастотных гармоник.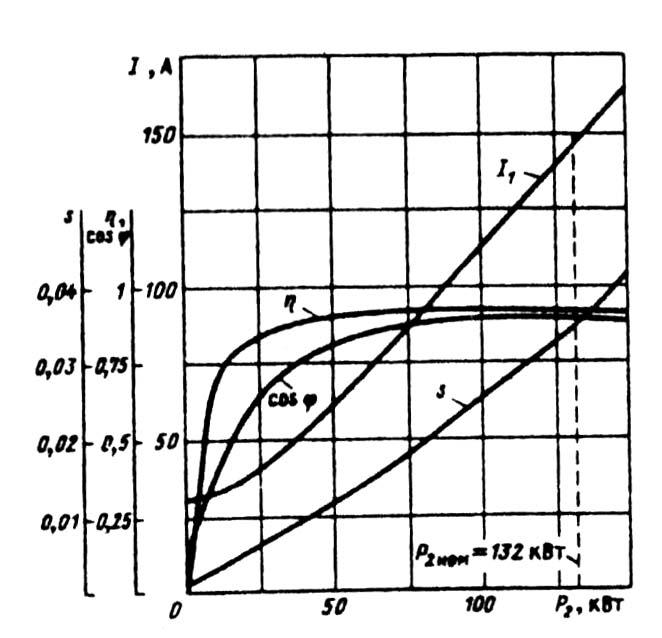 Например, в конструкции с переключаемым сопротивлением формы волны, подаваемые на ротор, далеки от синусоидальной.
Например, в конструкции с переключаемым сопротивлением формы волны, подаваемые на ротор, далеки от синусоидальной.
Тем не менее, стандартной практикой для сравнений эффективности является принятие идеальных форм сигналов тока и напряжения для каждой технологии.Например, в случаях с питанием от сети это означает идеальные синусоиды. В случаях с питанием от преобразователя большинство анализов предполагает формы сигналов, которые обеспечивают наименьшие потери в двигателе.
Асинхронные двигатели развивают крутящий момент из-за скольжения между скоростью ротора и скоростью магнитного потока, вращающегося вокруг обмотки статора. (По этой причине они считаются технологией с асинхронным двигателем.) Таким образом, всегда есть потери энергии, связанные со скольжением, что снижает эффективность асинхронного двигателя. В отличие от асинхронных двигателей, синхронные двигатели не имеют таких потерь на скольжение, но все же могут иметь потери на роторе, хотя обычно они небольшие. Этот тип потерь обычно возникает из-за вихревых токов в магнитах и пластинах. Реактивные и синхронно-реактивные двигатели являются синхронными конструкциями. Две другие конструкции двигателей, известные своей высокой энергоэффективностью, также являются синхронными. Это явнополюсные двигатели с постоянными магнитами и несовместимые двигатели с постоянными магнитами.
Этот тип потерь обычно возникает из-за вихревых токов в магнитах и пластинах. Реактивные и синхронно-реактивные двигатели являются синхронными конструкциями. Две другие конструкции двигателей, известные своей высокой энергоэффективностью, также являются синхронными. Это явнополюсные двигатели с постоянными магнитами и несовместимые двигатели с постоянными магнитами.
Однако в конструкции с переключаемым сопротивлением магнитное поле в роторе изменяется во времени. Это изменяющееся во времени поле обычно вызывает гистерезис ротора и вихретоковые потери.В зависимости от конкретной конструкции и условий эксплуатации эти потери в сердечнике ротора могут быть довольно большими и с довольно высокой частотой.
Электродвигатели с явнополюсными постоянными магнитами содержат магниты, погруженные в железо ротора или размещенные в пазах на поверхности ротора. Пространство над магнитами может содержать клетку для запуска. Неправильные двигатели с постоянными магнитами обычно имеют магниты на поверхности ротора. Несоответствие означает, что индуктивность двигателя, измеренная на клеммах, постоянна, независимо от положения ротора.
Несоответствие означает, что индуктивность двигателя, измеренная на клеммах, постоянна, независимо от положения ротора.
Вот как складываются пять технологий двигателей: явнополюсные PM, несинхронные PM, синхронно-реактивное сопротивление, переключаемое реактивное сопротивление и, наконец, что не менее важно, асинхронные двигатели. Что касается мощности и плотности крутящего момента, как и следовало ожидать, рейтинги отражают рейтинги эффективности, причем конструкции PM имеют самую высокую плотность крутящего момента, а конструкции индукции — наименьшую. Это имеет смысл, потому что необходимость рассеивать потери и соблюдать определенный температурный предел является общей для всех технологий двигателей.
Некоторые технологии двигателей сегодня могут работать в диапазоне скоростей при использовании с источниками регулируемой частоты. Для работы на фиксированной скорости без источника регулируемой частоты требуется пусковая клетка. Этот тип клетки является неотъемлемой частью конструкции асинхронного двигателя и в некоторых случаях может быть интегрирован как в синхронные реактивные, так и в явнополюсные двигатели с постоянными магнитами. Важно отметить, что несовместимые PM, явнополюсные PM без клетки, синхронные реактивные двигатели без клетки и реактивные электродвигатели с переключаемым сопротивлением всегда работают с инвертором и, следовательно, могут считаться частью системы с регулируемой скоростью.
Важно отметить, что несовместимые PM, явнополюсные PM без клетки, синхронные реактивные двигатели без клетки и реактивные электродвигатели с переключаемым сопротивлением всегда работают с инвертором и, следовательно, могут считаться частью системы с регулируемой скоростью.
Где используются
Асинхронные двигатели
широко доступны от многих производителей и поэтому относительно недороги. Эти промышленные рабочие лошадки часто считаются двигателями общего назначения, в которых работает все, от вентиляторов и насосов до компрессоров и конвейеров. Двигатели с явнополюсными постоянными магнитами имеют ограниченный диапазон мощностей (до 1200 л.с.) от меньшего числа производителей. Эти двигатели используются в широком диапазоне применений, требующих высокой удельной мощности, высокого КПД и работы в широком диапазоне скоростей и нагрузок.
Двигатели с явнополюсными и несимметричными постоянными магнитами относительно дороже, чем другие технологии, поскольку в них используются магниты из редкоземельных элементов. Неправильные двигатели с постоянными магнитами доступны в ограниченном диапазоне номиналов от нескольких производителей и обычно находят применение в качестве серводвигателей с номинальным крутящим моментом.
Неправильные двигатели с постоянными магнитами доступны в ограниченном диапазоне номиналов от нескольких производителей и обычно находят применение в качестве серводвигателей с номинальным крутящим моментом.
Синхронно-реактивные двигатели
доступны только у нескольких производителей в ограниченном диапазоне номиналов — от 2 до 450 л.с. Хотя эти двигатели когда-то использовались для приложений с низким энергопотреблением, таких как обработка веб-страниц, они начинают появляться в универсальных приложениях с регулируемой скоростью, таких как вентиляторы и насосы.Напомним, что в этой конструкции ротор свободен как от магнитов, так и от проводников. Его статор имеет такую же конфигурацию ламинирования и обмотки, что и широко распространенные асинхронные двигатели, что делает его относительно доступной технологией.
Модели
с переключаемым сопротивлением доступны только у небольшого числа производителей, и в основном они относятся к конкретным конструкциям OEM, а не к двигателям общего назначения. Простая конструкция ротора и статора помогает снизить затраты. Эти двигатели применялись в ряде нишевых приложений, где важна высокая скорость, таких как управление движением в принтерах, тяговые устройства в горнодобывающей промышленности и воздушные компрессоры.
Простая конструкция ротора и статора помогает снизить затраты. Эти двигатели применялись в ряде нишевых приложений, где важна высокая скорость, таких как управление движением в принтерах, тяговые устройства в горнодобывающей промышленности и воздушные компрессоры.
Плюсы и минусы
Не существует универсально совершенного двигателя, есть только двигатель, который подходит для предполагаемого применения. У каждой технологии есть свои сильные и слабые стороны. Асинхронные двигатели недороги, широко доступны и не содержат дорогих постоянных магнитов; их внутренняя слабость — потери от скольжения ротора. Несовместимые конструкции PM предлагают высокую эффективность, высокую плотность крутящего момента и высокую скорость, но только ограниченную работу выше их базовой скорости.Они также требуют постоянного возбуждения и используют дорогие магниты. Двигатели с явнополюсными постоянными магнитами также обладают высокой эффективностью и высокой плотностью крутящего момента, но имеют постоянное возбуждение и дорогие магниты, как и их несоосные аналоги.