Шаговой двигатель для ЧПУ: как определиться с выбором? Крутящий момент шагового двигателя
Выбор шагового двигателя для ЧПУ: критерии, рекомендации
Шаговый двигатель понадобится любому человеку, который собрался самостоятельно собрать станок с ЧПУ. Главное – заранее определиться со сферой применения устройства. Наибольших усилий и показателей требует обработка цветных металлов, что отдельно учитывается при выборе шагового двигателя для ЧПУ.
Какие критерии определяющие для выбора?
Надо помнить о том, что, по сравнению с обычными двигателями, шаговые требуют более сложных схем для управления. А критериев не так уж много.
- Параметр индуктивности.
Первый шаг – определение квадратного корня из индуктивности обмотки. Результат потом умножаем на 32. Значение, полученное в качестве итога, потом требуется сравнивать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны отличаться друг от друга слишком сильно. Мотор будет греться и шуметь слишком сильно, если напряжение питания больше полученного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, крутящий момент убывает. Чем больше индуктивность – тем проще сохранить высокий крутящий момент. Но для этого надо подобрать драйвер, имеющий большое напряжение питания. Только в этом случае шаговой двигатель работает нормально.
- График того, как крутящий момент и скорость зависят друг от друга.
Это позволит понять, насколько двигатель в принципе соответствует запросам и техническому заданию.
- Параметры геометрического плана.
Особое внимание рекомендуется уделить диаметру вала, фланцу и длине двигателя.
Кроме того, следующие показатели так же рекомендуется внимательно изучить:
- Максимальный статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток внутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
О разновидностях двигателей
Для станка используемая разновидность шаговых двигателей – параметр не менее важный, чем остальные. Каждая модель наделена своими особенностями.
- Биполярные чаще всего применяются совместно с ЧПУ.
Главное достоинство – возможность легко выбрать новый драйвер, если старый выходит из строя. На малых оборотах при этом сохраняется высокое удельное сопротивление.
- Трёхфазные.
Для них характерна высокая скорость. Актуальны, если именно данному параметру уделяют больше всего внимания в случае выбора.
- Униполярные.
Это несколько видов биполярных двигателей, которые отличаются друг от друга и подбираются в зависимости от подключения обмотки.
Можно изучить готовые модели станков, предлагаемые текущим рынком. Благодаря подобному подходу выбор значительно упрощается. Главное – чтобы характеристики и размеры подходили к создаваемому проекту.

Об усилиях резания
Часто владельцы думают, что на фрезу агрегата надо сильно давить, иначе она будет неправильно работать. Это заблуждение, которое не соответствует истине. Важнее всего то, как правильно пользователь задаёт параметры рабочего процесса.
Не обязательно пользоваться сложными специальными формулами, чтобы понять, как правильно действовать. Это можно проверить и прямо голыми руками.
По поводу резонанса при средних частотах
Шаговые двигатели связаны с возникновением сильного резонанса. По сути, они работают, как маятник с подвешенным на пружине грузиком. Роль груза выполняет ротор, а поле с магнитной энергией — пружина. Собственные колебания имеют частоту, определяемую по двум показателям:
- Инерция ротора.
- Сила тока.
Резонанс появляется, когда разность между скоростью и фазностью момента достигает 180 градусов. Это означает, что присутствует соответствие скорости и изменений внутри магнитного поля. Движение становится быстрым при позиционировании по новому шагу. Крутящий момент падает из-за того, что больше всего энергии уходит, чтобы преодолеть инерцию.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
С контроллера ПУ сигналы идут к драйверу. Далее организуется управление процессом, во время которого переключаются ключи, составляющие схему с питающим напряжением. Последнее идёт с блока питания, на двигатель, проходя по ключам.

Дополнительные рекомендации по выбору
Максимум по току требуемого напряжения, идущего к выводам – главный фактор, на основании которого следует делать выбор. Ток, выдаваемый драйвером, может быть следующих типов:
- Такой же, что потребляет двигатель.
- Выше, чем упомянутое ранее значение.
Желаемые параметры по исходному напряжению выбираются при помощи специальных переключателей.
Шаговые двигатели могут иметь различный порядок подключения. Обычно он зависит от того, каким количеством проводов снабжён привод. Надо обратить внимание и на назначение устройства. На рынке выпускается множество моделей, и практически у каждой используется свой вариант подключаемой схемы. Внутри размещается до 4-6 проводов. Биполярные модули сопровождают стандартно именно варианты с четырьмя проводами.
Каждые две обмотки идут с двумя приводами. Нужно использовать обычный метр, чтобы не допустить ошибок. Шестипроводные двигатели отличаются максимальной мощностью. Это значит, что каждая обмотка сопровождается двумя проводами и одним центр-краном. Такие аппараты допускают два вида соединений:
- С биполярными аппаратами.
- С униполярными моделями.
Для разделения проводов так же применяются приборы измерения. Однополярные устройства предполагают, что используются все шесть проводов. В случае с биполярными можно взять всего один центральный кран вместе с проводами по одной обмотке.
Что ещё учесть?
Центр-краном называют обычный провод. Ещё для него используют обозначения «центральный», «средний». Часть моделей шаговых двигателей снабжаются подобными приспособлениями. Каждая обмотка идёт совместно с тремя проводами, когда речь идёт об униполярных вариантах. Два из них организуют соединение с транзисторами. Центр-кран или средний идёт прямо до источника питания или напряжения.

Два боковых провода вообще можно игнорировать, если транзисторы использовать не планируется.
Пяти- и шестипроводные модели во многом похожи друг на друга. Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.
Заключение
Подобрать подходящую модель двигателя для станка будет проще, если заранее изучить основные характеристики, а так же предложения на соответствующем рынке. Главное – обращаться к поставщикам, которые заслуживают доверия. Малейший брак и ошибка приведут к выходу из строя весьма дорогостоящих деталей.
vseochpu.ru
Подбор и расчет шаговых двигателей для ЧПУ
При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность. Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания.
- График зависимости крутящего момента от скорости. Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании.
- Геометрические параметры. Имеет значение длина двигателя, фланец и диаметр вала.
Совет: также следует обратить внимание на омическое сопротивление фаз, номинальный ток в фазе, момент инерции ротора, максимальный статический синхронизирующий момент.
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Совет: еще один способ подбора двигателя – анализ готовых станков на рынке, которые близки по размерам и другим характеристикам к разрабатываемому.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с2, сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Справка: силу сопротивления должен развивать привод стола на гайке шариковой винтовой передачи.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c2.
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Совет: существуют калькуляторы для автоматического расчета мощности.Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
Классификация шаговых двигателей для ЧПУ
Советские модели
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
При выборе следует обратить внимание на наличие индекса ОС. Это особая серия с военной приемкой. Имеет более высокое качество исполнения, чем обычные модели.
Китайские модели
Примеры китайских шаговых двигателей для ЧПУ и их характеристики представлены ниже.
| Длина, мм | 48 | 40 | 34 |
| Ток питания в фазе, А | 2.5 | 1.7 | 1.33 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Масса, кг | 0.34 | 0.32 | 0.22 |
Биполярные шаговые двигатели для ЧПУ от CNC Technology
| Ток питания в фазе, А | 5 | 3 | 1.7 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Индуктивность, мГн | 6 | 3.5 | 2.8 |
| Диаметр вала | 14 | 8 | 5 |
Зная критерии выбора и ориентируясь в предложениях по шаговым двигателям на рынке можно подобрать подходящую модель для станка ЧПУ. Главное – покупать у проверенных поставщиков.
3 причины купить шаговый двигатель для ЧПУ в компании CNC Technology
- Двигатели от надежных производителей, эти же двигатели мы используем в наших станках.
- Всегда в наличии на складе.
- Комплексность: в нашем каталоге можно подобрать не только ШД, но и драйверы, датчики, соединительные муфты и другие комплектующие.
Получить консультацию по выбору шагового двигателя можно по телефону 8 (800) 350 33 60.
cnc-tehnologi.ru
Основные заблуждения при использовании шаговых электродвигателей
Даже опытные инженеры часто имеют не совсем верное представление о шаговых электродвигателях и способах управления ими. В данной статье мы разберем лишь несколько основных заблуждений что, надеюсь, поможет и новичкам и бывалым инженерам при выборе драйверов управления. Было бы хорошо разобрать все особенности, но тогда эта статья превратилась бы в книгу.
В этой статье речь пойдет о биполярных шаговых электродвигателях, поскольку они являются наиболее популярными в использовании на сегодняшний день. Униполярные шаговые электродвигатели все еще используются в некоторых устройствах, однако их популярность с каждым годом снижается. Это снижение обуславливается преобладанием относительно недорогих драйверов для биполярных двигателей. Учитывая снижение стоимости управления, почему бы не использовать биполярные шаговые электродвигатели? В конце концов у них есть еще один плюс – больший крутящий момент.
Температура
Многие инженеры ошибочно полагают, что если шаговый электродвигатель имеет небольшой размер, значит, его температура тоже должна быть небольшой. Этот миф легко развеять, взяв документацию на электрическую машину, пирометр, и произвести замер. То, что при касании может показаться «очень горячим», на самом деле не будет даже подходить к максимально допустимой температуре машины. Шаговые электродвигатели обычно имеют повышенную температуру, это связано с внутренними процессами в самой машине. Даже когда они не вращаются они также подвержены потерям. Тем не менее, если вы сомневаетесь – перестрахуйтесь и проверьте температуру. Естественно, если температура превысит предельно допустимую, указанную в паспорте, это может привести к необратимым последствиям (выход из строя или значительное сокращение срока службы).

В случаях, когда есть необходимость снизить потребление электроэнергии в режиме простоя, можно использовать специальные драйверы, в которые данная функция включена. Однако это повлияет не только на значение тока в обмотках, но и на удерживающий момент, что в определенных механизмах тоже важно.
Микрошаговый режим
Микрошаги это не магия. Существуют специальные драйверы для микрошагового управления. Это позволяет увеличить точность позиционирования, однако достигается за счет значительного крутящего момента. Кроме того, наличие драйвера, обеспечивающего шаг 1/32, не значит, что ваш электродвигатель сможет это реализовать. После определенного порога (1/10 и иногда 1/16) требуются высококачественные драйверы и двигатели. Даже если ваш шаговый электродвигатель и драйвер смогут реализовать микрошаг в 1/32, возможно ли это интегрировать в общую систему управления?
Рассмотрим следующий пример. Линейное перемещение с 10 шагами на дюйм ходового винта напрямую соединенного с типичным шаговым двигателем, имеющим 200 шагов на оборот. Каждый полный шаг электрической машины будет переведен в 0,0005 дюйма линейного движения. Казалось бы, что, якобы, та же система микрошагов 1/32 сможет уменьшить линейный шаг до 0,000015. Но в реальности реализации данной системы практически не возможна, так как упругость и силы трения не позволят преобразовать настолько миниатюрные шаги к линейному движению.
Микрошаговый режим реально полезен при проверке системы с шаговой электрической машиной на резонанс. Это дает определенные возможности для избегания резонанса. Как известно, любая механическая система имеет резонансную частоту. Для шаговых электродвигателей достижение этой частоты, как правило, происходит на определенной скорости, после чего двигатель начнет сильно шуметь. Эти шумы могут привести к «пропусканию шагов», что чревато серьезными последствиями для определенных систем. В некоторых случаях это может привести к слишком большим вибрациям. В случаях с режущими машинами, такими как токарные станки, этот звук можно спутать с рабочим звуком обработки поверхности заготовки. Микрошаговый режим уменьшает расстояние пройденное валом между шагами (на появление шумов тратится меньше энергии).
Номинальное напряжение и напряжение питания
Наверное, одним из самых запутанных моментов является несоответствие напряжения на обмотке, указанного в паспорте машины, и реального напряжения источника питания, используемого для питания электрической машины. Если в техпаспорте указывается напряжение обмотки равное 3,4 В, то как получается, что электродвигатель подключается к источнику 48 В постоянного тока? Или иногда и к 80 В.
Номинальное напряжение не настолько критично, обратите внимание на ток.
Такое подключение стало возможным благодаря тому, что большинство современных драйверов имеют встроенное ШИМ управление выходным напряжением. Драйверы контролируют ток обмотки. Когда ток доходит до максимального значения (определяется максимальным током электрической машины), драйвер отключает питание, или снижает значение тока. При этом превышать максимальное напряжение драйвера нельзя.
Рассмотрим небольшой пример на основе шагового электродвигателя с номинальными данными: Uн = 12 В, Iн = 0,33 А, активное сопротивление обмотки R = 32,6 Ом, реактивное сопротивление обмотки L = 48 мГн.
12 В – это не максимально допустимое напряжение. Это напряжение нормальной работы, при котором в обмотке будет протекать ток равный 0,33 А.
Если вы управляете электрической машиной с помощью очень простого или Н-мостового драйвера, то вам необходимо ограничивать напряжение 12 В для предотвращения превышения номинального тока.
В случае использования драйвера с прерывателем (chopper drive), превышение номинального напряжения не является проблемой. Чем выше будет напряжение – тем быстрее машина достигнет магнитного насыщения. Приведенная ниже формула это иллюстрирует:
Приведенная формула вычисляет ток обмотки электродвигателя за определенный промежуток времени.
Ток, через катушку индуктивности 50 мГн, в течении 1 мс увеличивается пропорционально напряжению.
Если двигатель «перешагнет» прежде, чем сможет достаточно насытиться для развития необходимого момента, он начнет «терять» шаги. Если вы обнаружите, что такое происходит с вашей машиной на большом ходу – рассмотрите вариант повышения напряжения питания.
elenergi.ru
Выбор шагового двигателя
Вам уже приходилось делать выбор между разными шаговыми двигателями для реализации своих амбициозных проектов? Зачастую у новичков существует миф, что NEMA 17 слабые и ни на что не годные шаговики, а для 3D-принтера обязательно нужен как минимум NEMA 23, а то и дороже. Давайте попробуем разобраться какие критерии всё-таки должны учитываться при правильном выборе шагового двигателя. Если на них не обращать внимание, а просто надеяться на свой инстинкт потребителя, то в результате можно сильно разочароваться. К примеру можно купить как бы обычный двигатель NEMA 17 и стандартный драйвер рекомендуемый под него, но получить постоянно перегревающуюся микросхему драйвера и невозможность нормальной работы проекта.
Посмотрим для начала какой выбор нам предоставляют самые доступные поставщики шаговых двигателей.
Двигатели NEMA 16 представлены такими моделями
| Модель | Угол шага | Количество проводов | Номинальныйток фазы, А | Сопротивление фазы, Ом | Индуктивностьфазы, мГн | Инерцияротора,г·см2 | Удерживающиймомент, Н·см | Крутящиймомент,Н·см | Длина мотора,мм |
| 39HS20044 | 1,8 | 4 | 0,42 | 18 | 12 | 12 | 8 | 0,5 | 20 |
| 39HS26064 | 1,8 | 4 | 0,6 | 9 | 10 | 14 | 14 | 0,8 | 26 |
| 39HS34064 | 1,8 | 4 | 0,6 | 12 | 13 | 19 | 18 | 1 | 34 |
| 39HS34124 | 1,8 | 4 | 1,2 | 3,2 | 3 | 19 | 16 | 1 | 34 |
| 39HS34046 | 1,8 | 6 | 0,4 | 30 | 14 | 19 | 12 | 1 | 34 |
| 39HS40064 | 1,8 | 4 | 0,6 | 12 | 20 | 24 | 24 | 1,2 | 40 |
| 39HS40124 | 1,8 | 4 | 1,2 | 3,8 | 6,5 | 24 | 24 | 1,2 | 40 |
| 39HS40046 | 1,8 | 6 | 0,4 | 30 | 22 | 24 | 18 | 1,2 | 40 |
Диаметр вала у NEMA 16 - 5 мм
В формфакторе NEMA 17 нам доступны такие двигатели
| Модель | Уголшага | Длинамотора,мм | Номинальныйток, А | Сопротивлениефазы, Ом | Индуктивностьфазы, мГн | Удерживающиймомент, Н·см | Крутящиймомент,Н·см | Инерцияротора,г·см2 | Количествопроводов,шт. | Весмотора,г |
| 17HS2408 | 1,8 | 28 | 0,6 | 8 | 10 | 12 | 1,6 | 34 | 4 | 150 |
| 17HS3401 | 1,8 | 34 | 1,3 | 2,4 | 2,8 | 28 | 1,6 | 34 | 4 | 220 |
| 17HS3410 | 1,8 | 34 | 1,7 | 1,2 | 1,8 | 28 | 1,6 | 34 | 4 | 220 |
| 17HS3430 | 1,8 | 34 | 0,4 | 30 | 35 | 28 | 1,6 | 34 | 4 | 220 |
| 17HS3630 | 1,8 | 34 | 0,4 | 30 | 18 | 21 | 1,6 | 34 | 6 | 220 |
| 17HS3616 | 1,8 | 34 | 0,16 | 75 | 40 | 14 | 1,6 | 34 | 6 | 220 |
| 17HS4401 | 1,8 | 40 | 1,7 | 1,5 | 2,8 | 40 | 2,2 | 54 | 4 | 280 |
| 17HS4402 | 1,8 | 40 | 1,3 | 2,5 | 5 | 40 | 2,2 | 54 | 4 | 280 |
| 17HS4602 | 1,8 | 40 | 1,2 | 3,2 | 2,8 | 28 | 2,2 | 54 | 6 | 280 |
| 17HS4630 | 1,8 | 40 | 0,4 | 30 | 28 | 28 | 2,2 | 54 | 6 | 280 |
| 17HS8401 | 1,8 | 48 | 1,8 | 1,8 | 3,2 | 52 | 2,6 | 68 | 4 | 400 |
| 17HS8402 | 1,8 | 48 | 1,3 | 3,2 | 5,5 | 52 | 2,6 | 68 | 4 | 400 |
| 17HS8403 | 1,8 | 48 | 2,3 | 1,2 | 1,6 | 46 | 2,6 | 68 | 4 | 400 |
| 17HS8630 | 1,8 | 48 | 0,4 | 30 | 38 | 34 | 2,6 | 68 | 6 | 400 |
Точность шага без нагрузки ±5 %
Диаметр вала 5 мм
Следующий формфактор NEMA 23 представлен такими моделями
| Модель | Уголшага | Длинамотора,мм | Диаметрвала,мм | Длинавала,мм | Номинальныйток, А | Сопротивлениефазы, Ом | Индуктивностьфазы, мГн | Удерживающиймомент, Н·м | Крутящиймомент,Н·см | Инерцияротора,г·см2 | Количествопроводов,шт. | Весмотора,кг |
| 57HS4128A4 | 1,8 | 41 | 6,35 | 21 | 2,8 | 0,7 | 1,4 | 0,55 | 2,5 | 150 | 4 | 0,55 |
| 57HS5128A4 | 1,8 | 51 | 6,35 | 21 | 2,8 | 0,83 | 2,2 | 1,1 | 2,8 | 190 | 4 | 0,6 |
| 57HS5128B4 | 1,8 | 51 | 6,35 | 21 | 2,8 | 0,83 | 2,2 | 1,1 | 2,8 | 190 | 4 | 0,65 |
| 57HS5630A4 | 1,8 | 56 | 6,35 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630A4D8 | 1,8 | 56 | 8 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630B4 | 1,8 | 56 | 6,35 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630B4D8 | 1,8 | 56 | 8 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS7630A4 | 1,8 | 76 | 6,35 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630A4D8 | 1,8 | 76 | 8 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630B4 | 1,8 | 76 | 6,35 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630B4D8 | 1,8 | 76 | 8 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS8430A4 | 1,8 | 84 | 6,35 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430A4D8 | 1,8 | 84 | 8 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430B4 | 1,8 | 84 | 6,35 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430B4D8 | 1,8 | 84 | 8 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS11230A4 | 1,8 | 112 | 8 | 21 | 3 | 1,6 | 6,8 | 3 | 12 | 800 | 4 | 1,8 |
| 57HS11230B4 | 1,8 | 112 | 8 | 21 | 3 | 1,6 | 6,8 | 3 | 12 | 800 | 4 | 1,8 |
| 57HS11242A4 | 1,8 | 112 | 8 | 21 | 4,2 | 1,4 | 1,8 | 3 | 12 | 800 | 4 | 1,8 |
У NEMA 23 диаметр вала составляет 6,35 мм или 8 мм
Варианты подключения двухфазных шаговых двигателей
Теперь разберёмся зачем шаговому двигателю нужно больше чем четыре вывода. Для этого рассмотрим различные варианты подключения двухфазных шаговиков
1) Тут мы видим самый простой вариант с 4-проводным шаговым двигателем. Здесь главное правильно соединить выводы А+ двигателя с А+ драйвера, А- двигателя с А- драйвера и так далее.
2) Дальше идёт 8 - проводный двигатель. Для него характерны два варианта подключения.
Это параллельное подключение обмоток шаговика. При таком подключении уменьшается суммарная индуктивность обмоток, что позволяет увеличить максимальную скорость вращения вала. Величина индуктивности обмоток влияет на частотные характеристики двигателя, особенно на высоких частотах управляющих сигналов. К такому подключению стоит стремиться, если вам действительно важна высокая скорость работы шаговика и критична точность и КПД на высоких оборотах.
А это последовательное соединение. При таком соединении двигатель будет вести себя как обычный 4-проводный.
3) Теперь, когда мы уже не так боимся множества выводов на шаговиках, посмотрим, как подключать 6-выводный двигатель.
Представленное подключение позволяет уменьшить индуктивность и этим повысить качество работы двигателя на высоких частотах (оборотах). Но при этом понижается КПД двигателя и его сила, повышается ток управления. Я бы советовал такой вариант включения только для временных скоростных операций, не требующих частого торможения и разгона, например во время возврата каретки 3D-принтера. При этом необходим механизм автоматического переключения режимов работы двигателя с полнообмоточного на полуобмоточный.
И второй вариант включения 6-проводного шагового двигателя следующий
Средние выводы каждой обмотки просто не задействуются и шаговик работает в точности как 4-проводный работяга.
Рассчетное определение необходимого момента шагового двигателя
Такой параметр как "момент" у двигателя характеризует его силу вращения. Он показывает, какой максимальной силе противодействия, приложенной на определённом расстоянии от своей оси двигатель способен противостоять.
Момент определяется по формуле M=F·R,где М- момент силы в Н·м; F - сила противодействия в Ньютонах; R - расстояние точки приложения силы от центра оси двигателя, в метрах.
Что такое ньютон? Это величина, характеризующая взаимодействие физических тел и полей между собой. Например, чтобы приложить к подвешенной верёвке силу, равную 1 Ньютон, в земных условиях необходимо повесить на неё гирю весом 1/9,81 = 0,102 кг.
А при диаметре вала двигателя 5 мм и крутящем моменте двигателя в 1Н·м, этот двигатель будет способен накрутить на свой вал нитку с подвешенным к ней грузом не превышающим 20,4 кг и минимальным ускорением:
1Н·м = 0,102 кг · 1м = 20,4 кг · 5 мм
Использование динамометра для определения момента, требуемого от двигателя.
Теория и рассчёты это всё очень полезно, но зачастую легче и быстрее будет отбросить теорию в сторону и взять и замерять действующие силы при помощи измерительного прибора. Динамометр как раз способен экспериментально показать нам практическую силу, противодействующую нашему двигателю в прямых плоскостях (момент силы вращения он не покажет). Я в продаже не встречал динамометров дешевле 500$, поэтому буду рассматривать использование только самодельного устройства. Это устройство состоит из шкалы и, зафиксированной с одной стороны шкалы, пружины.
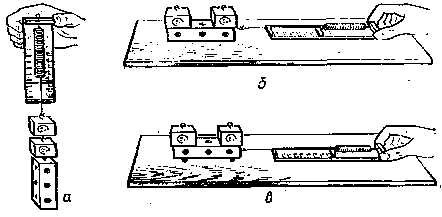
Градуировка и использование самодельного динамометра.
Градуировка - это нанесение делений на шкалу измерения динамометра. Для разных диапазонов измерения силы, будут необходимы разные по силе пружины и их длины, а так же длины планочки под шкалу. Допустим мы хотим своим динамометром измерять силу в пределах 1 ... 10 Н. Для его градуировки необходимо как на рисунке а) подвесить к динамометру груз в 100 г и отметить на шкале риску с цифрой 1 Н, а затем подвесить груз в 1 кг и наметить риску в 10 Н. Теперь всю шкалу между этими двумя рисками нужно поделить на 9 равных отрезков и расставить цифры от 2 до 9 Н.
electronica52.in.ua
Выбор шагового двигателя
- Статьи
- Конструирование портальных станков с ЧПУ
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ О РЕЖИМАХ РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ
Модель работы идеального шагового двигателя
Шаговый двигатель - устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопортивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.
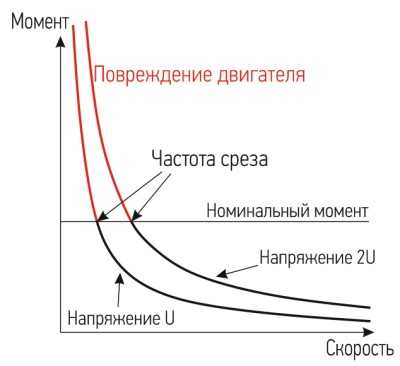
Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога - ток будет ограничен индуктивностью обмоток.
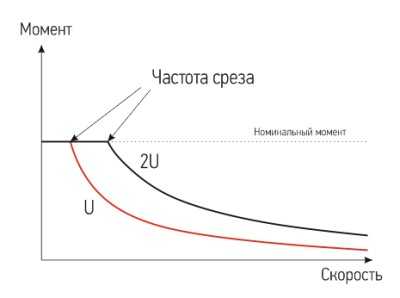
В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики.
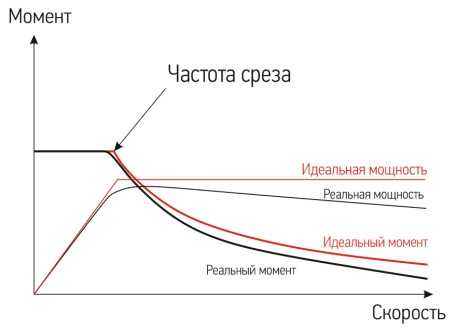
Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке "постоянной мощности". Скругление на переходной точке обусловлено переходным процессом в цепи - драйвер постепенно превращается из источника тока в источник напряжения.
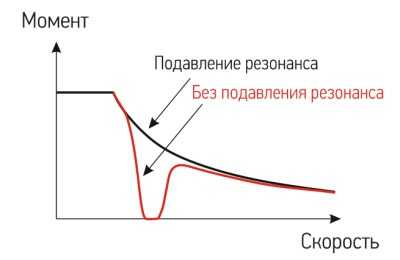
Резонанс на средних частотах
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника "подвешенный на пружине груз", где грузом является ротор, а пружиной - магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.
Мощность двигателя
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.

Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
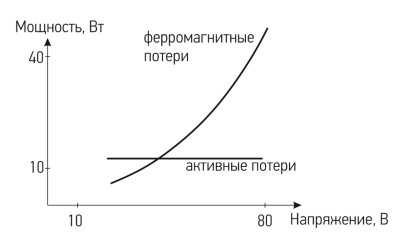
Напряжение питания и нагрев двигателя
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, - нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.
Кратко о мощности шагового двигателя
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика - кривая скорости-момента. Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной.
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания - тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях - "медленный" и "быстрый", с большой и малой индуктивностью. Причем "быстрые" модели пользуются большей популярностью - для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности - можно взять двигатель побольше. "Медленные" модели остаются для специфических применений - в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п. Ток обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю - он должен быть способен выдавать именно такой уровень тока. Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку - таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 4 вещей - производителя, вида двигателя, размера и индуктивности. Первый параметр поддается оценке с трудом - мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик - размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов - определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
Совместно с этими оценками можно использовать оценки для размеров рабочего поля: Рабочее поле 0,1-0,5 кв.м. - двигатели PL57-76 или аналогичные. Рабочее поле 0,5-1 кв.м. - двигатели PL86-80 или аналогичные. Рабочее поле 1-1,5 кв.м. - двигатели PL86-114 или аналогичные. Если характеристики Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит использовать дополнительные оценочные методы. Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам - проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
И последнее, что можно порекомендовать - обратиться за консультацией к опытным специалистам.
purelogic.ru
Измерение крутящего момента двигателя VSS42-200-1.2
В ходе "внезапно обнаруженных особенностей" шаговых двигателей, которые предполагается использовать в криостате ИК-спектрометра (в пиковом режиме работы они выделяют 50 Вт!), а также для изучения, насколько драйвер ШД L6208N хуже драйвера TB6560AHQ, я на этой неделе провел кое-какие испытания.Для затравки — видео:это позорище — "измерительная установка", использующаяся в эксперименте.
Итак, на видео выше показано, как проводились измерения момента: испытуемыйшаговый двигатель был зафиксирован при помощи струбцины, на вал двигателя черезжесткую муфту был надет цилиндр диаметром 50мм, на который наматывалась нитьс подвешенным к ней грузом. Таким образом, изменяя массу подвешенного грузаможно было изменять момент силы, приложенной к валу двигателя.Куча соплей, торчащих из макетки на столе — привычный для меня способ "наколенного макетирования" (я уже ранее выкладывал видео с управлением механикой криостата, там сопли еще страшней были). На макетке была собрана полноценная схемка с драйвером L6208N. Правда, в работе наблюдались "косяки" из-за того, что токи там довольно большие протекают, а элементы просто натыканы в разъемы макетки... Вот все это безобразие крупным планом:
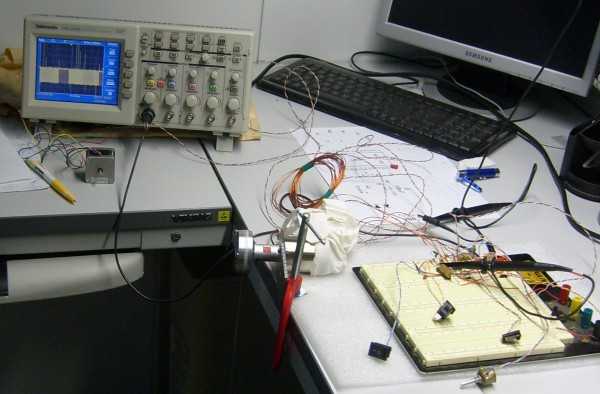 "Испытательный стенд" с видео выше
"Испытательный стенд" с видео вышеСистема управления двигателем была запитана от 12-вольтового китайского блока питания с регулировкой. Уровень напряжения был установлен на минимум (10.6 В).
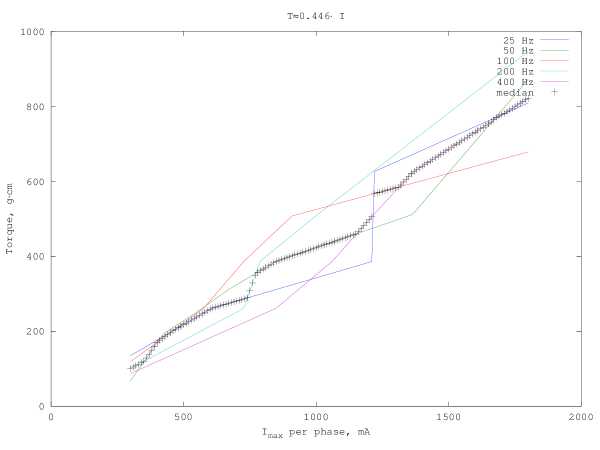
Зависимость крутящего момента от силы тока в обмотках двигателя
Наибольший крутящий момент у любого шагового двигателя возникает на малых скоростях вращения (это — известный факт, справедливый для всех шаговиков с более-менее высокими сопротивлением и индуктивностью обмоток). Для нас интересны скорости вращения вала, не превышающие ~2 оборотов в секунду (400 шагов/с). В полношаговом режиме работы драйвера L6208N для смещения вала двигателя на один шаг необходимо подать на драйвер четыре тактовых импульса. В полушаговом режиме один шаг двигателя соответствует восьми тактовым импульсам.На приведенных далее графиках указывается частота тактовых импульсов,подающихся на драйвер шагового двигателя. Соответственно, при работе вполношаговом режиме скорость вращения вала (в шагах в секунду) в четыре разаменьше тактовой частоты, а при работе в полушаговом режиме скорость меньше ввосемь раз.
Дальше приведена картинка с зависимостью величины крутящего момента на валу испытуемого двигателя от силы тока в обмотках. Медианное усреднение серии измерений и линейная аппроксимация результата показали, что момент на валу (в г·см) вполне линейно изменяется и примерно в 450 раз превышает силу тока в обмотках двигателя (измеренную в Амперах).
 Зависимость крутящего момента VSS42 от силы тока в обмотках на разных скоростях вращения вала
Зависимость крутящего момента VSS42 от силы тока в обмотках на разных скоростях вращения валаЗависимость максимальной скорости вращения вала двигателя от силы тока в обмотках при постоянной величине нагрузки на вал
Для изучения предельных скоростей вращения нагруженного вала двигателя на прикрепленный к валу цилиндр подвешивались грузы массой 100, 150 и 200г, дающие постоянный момент силы в 250, 375 и 500г·см соответственно. Чтобы массу подвеса можно было быстро изменять, я просто взял обычный пакетик с застежкой-молнией, измерил его массу на лабораторных весах и подвесил на вал при помощи ниточки. В пакет складывались гирьки от весов + при недостаче массы гирек я подкладывал болты, массу которых заранее измерил.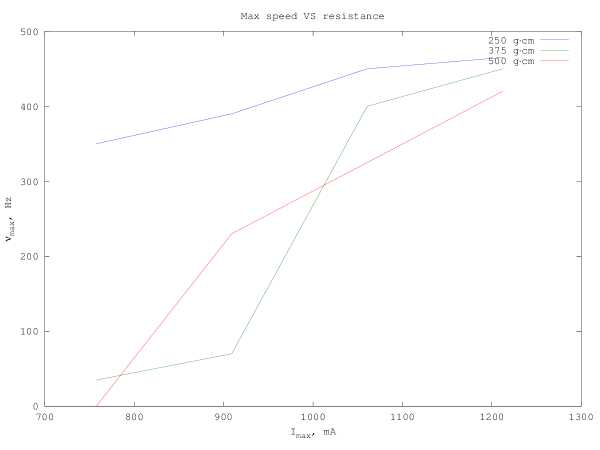 Предельная скорость вращения вала двигателя в зависимости отприложенной нагрузки и силы тока в обмоткахНа картинке выше изображены результаты измерений, показавшие, что снижение тока в обмотках приводит к очень резкому снижению крутящего момента двигателя, что особо хорошо заметно на высоких скоростях вращения вала. Снижение до 50% номинального тока в обмотках двигателя приводит к падению практически до нуля его нагрузочной характеристики. Снижение силы тока в обмотках на 30% лишь незначительно ухудшает нагрузочную характеристику двигателя, для увеличения величины крутящего момента в этом случае необходимо лишь снизить скорость вращения вала.
Предельная скорость вращения вала двигателя в зависимости отприложенной нагрузки и силы тока в обмоткахНа картинке выше изображены результаты измерений, показавшие, что снижение тока в обмотках приводит к очень резкому снижению крутящего момента двигателя, что особо хорошо заметно на высоких скоростях вращения вала. Снижение до 50% номинального тока в обмотках двигателя приводит к падению практически до нуля его нагрузочной характеристики. Снижение силы тока в обмотках на 30% лишь незначительно ухудшает нагрузочную характеристику двигателя, для увеличения величины крутящего момента в этом случае необходимо лишь снизить скорость вращения вала.Зависимость крутящего момента от скорости вращения вала
Выше было показано, что небольшое уменьшение номинальной силы тока в обмотках двигателя не приводит к значительному ухудшению значения крутящего момента на его валу. Для определения динамических характеристик двигателя к его обмоткам был приложен ток величиной 87.5% и 75% от номинального (1.05А и 0.9А соответственно). Кроме того, изучалась возможность увеличения крутящего момента при разгоне двигателя кратковременной установкой режима работы драйвера шагового двигателя в полушаговый режи.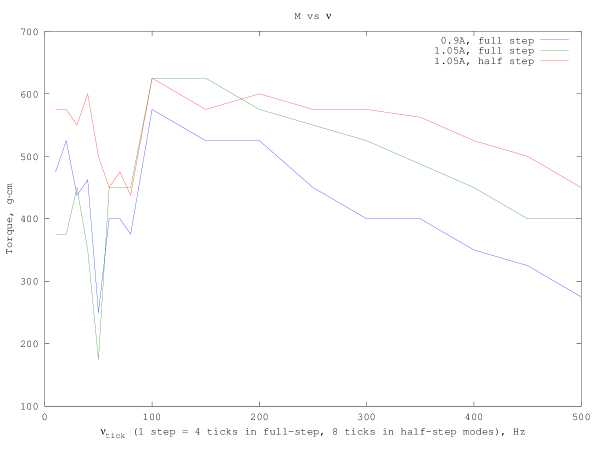 Изменение крутящего момента на разных скоростях вращения валаВыше изображена полученная динамическая характеристика. Резкий спад крутящего момента на частотах тактовых импульсов порядка 50Гц может быть обусловлен особенностями используемого драйвера шаговых двигателей (на испытываемом ранее драйвере TB6560AHQ таких особенностей замечено не было). Похоже, либо микросхемка "захлебывается" и начинает блокироваться из-за перегрева (грелась она на малых оборотах прилично, а на скоростях выше 25шагов/с оставалась практически холодной), либо в ней установлен фильтр наводок на 50Гц, который и "дает жару" — в подробности мне вникать лень.
Изменение крутящего момента на разных скоростях вращения валаВыше изображена полученная динамическая характеристика. Резкий спад крутящего момента на частотах тактовых импульсов порядка 50Гц может быть обусловлен особенностями используемого драйвера шаговых двигателей (на испытываемом ранее драйвере TB6560AHQ таких особенностей замечено не было). Похоже, либо микросхемка "захлебывается" и начинает блокироваться из-за перегрева (грелась она на малых оборотах прилично, а на скоростях выше 25шагов/с оставалась практически холодной), либо в ней установлен фильтр наводок на 50Гц, который и "дает жару" — в подробности мне вникать лень.На скоростях ниже 50Гц в полношаговом режиме (12.5шагов/с) крутящий момент двигателя очень резко спадает до нуля (видимо, это обусловлено очень низкой индуктивностью обмоток двигателя). Наиболее оптимальной является скорость вращения двигателя около 25шагов/с (в полношаговом режиме драйвера L6208N). Динамический диапазон данного двигателя довольно узок: при увеличении скорости вращения вала до 150шагов/с (в полношаговом режиме) крутящий момент снижается в два раза. Наиболее оптимальным режимом работы двигателя является скорость от 25 до 100шагов/с (в полношаговом режиме) со стартом в полушаговом режиме драйвера. Такой режим обеспечивает высокий стартовый момент с поддержанием величины крутящего момента при дальнейшем движении с бóльшей скоростью.
Выводы
Несмотря на очень низкие величины сопротивления и индуктивности обмоток шагового двигателя VSS42-200-1.2, возможно достижение относительно высокой величины крутящего момента на его валу при снижении напряжения питания до ~10В и силы тока в обмотках до ~0.9А (т.е. снижения энерговыделения от номинальных 50.4Вт до 9Вт) за счет варьирования режимов работы драйвера шагового двигателя.Управлять двигателем возможно как посредством драйвера TB6560AHQ, так и при помощи драйвера L6208N. Правда, лично мне больше нравится первый: он показывает значительно более красивые осциллограммы (а при дроблении шага на 16 у него на выходе почти синусоида!) и имеет большее количество "настроек".
Ну, а напоследок, чтобы не утомлять почтенную публику созерцанием изображения осциллограмм, привожу видео:
eddy-em.livejournal.com
Шаговые двигатели
Шаговый двигатель представляет собой «цифровую» версию электродвигателя. Ротор перемещается дискретными ступенями, как заданный, а не вращается непрерывно, как обычный двигатель. При остановке, но под напряжением, шаговый двигатель (короткий для шагового двигателя) удерживает свою нагрузку устойчивой с удерживающим моментом . Широкое распространение шагового двигателя за последние два десятилетия было обусловлено господством цифровой электроники. Современная твердотельная электроника для водителя была ключом к ее успеху. И, микропроцессоры легко взаимодействуют с цепями драйвера шагового двигателя.
Примером, предшественником шагового двигателя был сервомотор. Сегодня это более дорогое решение для высокопроизводительных приложений управления движением. Расход и сложность серводвигателя обусловлены дополнительными компонентами системы: датчиком положения и усилителем ошибок. (Рис. Ниже ). По-прежнему можно позиционировать тяжелые нагрузки за пределы степеней более низкого уровня мощности. Высокое ускорение или необычно высокая точность все еще требуют серводвигателя. В противном случае по умолчанию используется степпер из-за низкой стоимости, простой электроники привода, хорошей точности, хорошего крутящего момента, умеренной скорости и низкой стоимости.
Шаговый двигатель против серводвигателя.
Шаговый двигатель позиционирует головки чтения-записи в дисковод гибких дисков. Они когда-то использовались с той же целью в жестких дисках. Тем не менее, высокая скорость и точность, необходимые для современного позиционирования головки жесткого диска, диктуют использование линейного сервомотора (звуковой катушки).
Сервоусилитель представляет собой линейный усилитель с некоторыми сложными для интеграции дискретных компонентов. Для оптимизации усиления сервоусилителя и фазового отклика на механические компоненты требуется значительное проектное усилие. Драйверы шагового двигателя представляют собой менее сложные полупроводниковые переключатели, которые либо «включены», либо «выключены». Таким образом, контроллер шагового двигателя является менее сложным и дорогостоящим, чем контроллер серводвигателя.
Синхронные двигатели Slo-syn могут работать от напряжения сети переменного тока, как однофазный асинхронный двигатель с постоянным конденсатором. Конденсатор генерирует вторую фазу 90 o . При прямом сетевом напряжении мы имеем двухфазный привод. В эти дни чаще встречаются сигналы возбуждения биполярных (±) квадратных волн 2-24 В. Биполярные магнитные поля могут также генерироваться из однополярных ( однополюсников ) напряжений, подаваемых на чередующиеся концы отцентрированной обмотки центра. (Рисунок ниже ) Другими словами, DC можно переключить на двигатель, чтобы он увидел переменный ток. Когда обмотки включаются последовательно, ротор синхронизируется с последующим магнитным полем статора. Таким образом, мы рассматриваем шаговые двигатели как класс синхронного двигателя переменного тока.
Униполярный привод центральной запертой катушки на (b), эмулирует ток переменного тока в одиночной катушке (a).
Характеристики
Шаговые двигатели являются прочными и недорогими, потому что ротор не содержит обмоточных колец или коммутатора. Ротор представляет собой цилиндрическое твердое тело, которое также может иметь либо выступающие полюса, либо мелкие зубы. Чаще всего ротор представляет собой постоянный магнит. Определите, что ротор представляет собой постоянный магнит, при помощи беспилотного ручного вращения, показывающего крутящий момент , крутящие моменты. Катушки с шаговым двигателем наматываются в слоистый статор, за исключением конструкции штабеля . Там может быть всего лишь две фазы обмотки или целых пять. Эти фазы часто разделяются на пары. Таким образом, 4-полюсный шаговый двигатель может иметь две фазы, состоящие из линейных пар полюсов, расположенных на расстоянии друг от друга на расстоянии 90 o . Также могут быть несколько пар полюсов на фазу. Например, 12-полюсный степпер имеет 6 пар пар, по три пары на фазу.
Так как шаговые двигатели не обязательно вращаются непрерывно, нет рейтинга мощности. Если они вращаются непрерывно, они даже не подходят к дробной номинальной мощности hp. Они поистине небольшие устройства с малой мощностью по сравнению с другими двигателями. Они имеют номиналы крутящего момента до тысячи дюймов (дюйм-унций) или десять нм (ньютон-метры) для единицы измерения 4 кг. Небольшой шагомер размера «копейки» имеет крутящий момент в сотне нонтон-метра или несколько дюймов-унций. Большинство степлеров составляют несколько дюймов в диаметре с долей нм или несколькими крутящими моментами в унции. Имеющийся крутящий момент зависит от скорости двигателя, инерции нагрузки, крутящего момента нагрузки и электроники привода, как показано на кривой скорости и крутящего момента . (Рис. Ниже ) Напряжённый шаговый держатель имеет относительно высокий рейтинг удерживающего момента . Для работающего двигателя меньше крутящего момента, уменьшающегося до нуля на некоторой высокой скорости. Эта скорость часто не достижима из-за механического резонанса комбинации нагрузки двигателя.
Характеристики скорости шага.
Шаговые двигатели перемещаются на один шаг за шагом, шаг за шагом , когда изменяются формы возбуждения. Шаг угла связан с деталями конструкции двигателя: количеством катушек, количеством полюсов, количеством зубьев. Он может составлять от 90 o до 0,75 o , что соответствует от 4 до 500 шагов за оборот. Приводная электроника может уменьшать шаг шага на пол, перемещая ротор в полушагах .
Степперы не могут мгновенно получать скорости на кривой крутящего момента. Максимальная начальная частота - это максимальная скорость, с которой может быть запущен остановленный и незагруженный степпер. Любая нагрузка сделает этот параметр недостижимым. На практике ступенчатая скорость нарастает во время начала с намного ниже максимальной начальной частоты. При остановке шагового двигателя скорость шага может быть уменьшена до остановки.
Максимальный крутящий момент, при котором шаговый двигатель может запускать и останавливаться, представляет собой момент затяжки . Эта крутящая нагрузка на шаговый двигатель обусловлена фрикционными (тормозными) и инерционными (маховиками) нагрузками на вал двигателя. Как только двигатель достигнет скорости, крутящий момент является максимальным устойчивым крутящим моментом без потери шагов.
Существует три типа шаговых двигателей в порядке возрастания сложности: переменное сопротивление, постоянный магнит и гибрид. Шаговый двигатель с переменным сопротивлением имеет твердотельный ротор из мягкой стали с выступающими полюсами. Шагомер с постоянным магнитом имеет цилиндрический ротор с постоянным магнитом. Гибридный степпер имеет мягкие стальные зубцы, добавленные к ротору постоянного магнита для меньшего угла шага.
Шаговый усилитель с переменной степенью
Шаговый двигатель с переменным сопротивлением полагается на магнитный поток, стремящийся к самому низкому пути сопротивления через магнитную цепь. Это означает, что мягкий магнитный ротор неправильной формы будет двигаться, чтобы закончить магнитную цепь, минимизируя длину любого воздушного зазора с высоким сопротивлением. Статор, как правило, имеет три обмотки, распределенные между парами полюсов, с четырьмя выступающими полюсами ротора с шагом 30 o . (Рис. Ниже ). Обесточенный шаговый двигатель без фиксирующего момента при повороте руки может быть идентифицирован как шаговый двигатель с переменным сопротивлением.
Трехфазные и четырехфазные шаговые двигатели с переменной нагрузкой.
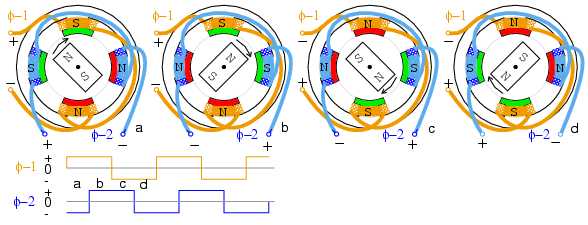
Формы сигналов возбуждения для шага 3-φ можно увидеть в разделе «Двигатель сопротивления». Привод для шага 4-φ показан на рисунке ниже . Последовательное переключение фаз статора создает вращающееся магнитное поле, которое следует за ротором. Однако из-за меньшего числа полюсов ротора ротор движется меньше, чем угол статора для каждого шага. Для шагового двигателя с переменным сопротивлением шаг шага определяется следующим образом:
Θ S = 360 o / N S Θ R = 360 o / N R Θ ST = Θ R - Θ S Где: Θ S = угол статора, Θ R = угол ротора, Θ ST = угол поворота N S = полюсы полюса числа, N P = полюсы числа роторов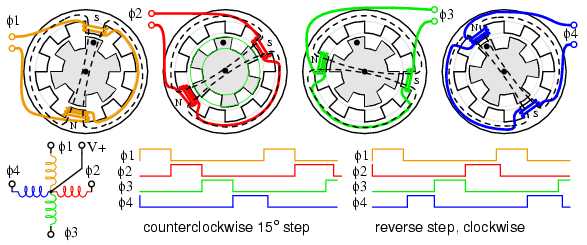 Последовательность шага для шагового переключателя с переменным сопротивлением.
Последовательность шага для шагового переключателя с переменным сопротивлением.
На рисунке выше , переходя от φ 1 к φ 2 и т. Д., Магнитное поле статора вращается по часовой стрелке. Ротор перемещается против часовой стрелки (CCW). Заметьте, чего не бывает! Зубчатый ротор не перемещается к следующему зубцу статора. Вместо этого поле φ2 статора притягивает другой зуб при перемещении ротора CCW, который является меньшим углом (15 o ), чем угол статора 30 o . Угол зубца ротора 45 o входит в расчет по вышеуказанному уравнению. Ротор перемещал CCW на следующий роторный зуб при 45 o , но он выравнивается с CW на зубье статора 30 o . Таким образом, фактическим углом шага является разность между углом статора 45 o и углом ротора 30 o . Как далеко шатер будет вращаться, если ротор и статор имеют одинаковое количество зубов? Нулевая нотация.
При запуске с фазой φ 1 возбуждаются три импульса (φ 2 , φ 3 , φ 4 ), чтобы выровнять «пунктирный» зуб ротора до следующего зубца CCW Tooth, который равен 45 o . С 3-мя импульсами на зуб статора и зубьями 8-статора 24-импульсы или ступени перемещают ротор на 360 o .
Перевернув последовательность импульсов, направление вращения обратнее справа. Направление, скорость шага и количество шагов контролируются контроллером шагового двигателя, подающим драйвер или усилитель. Это можно объединить в одну плату. Контроллер может быть микропроцессором или специализированной интегральной схемой. Драйвер не является линейным усилителем, а простым выключателем, способным обеспечивать достаточно высокий ток для подзарядки шагового усилителя. В принципе, драйвер может быть реле или даже тумблером для каждой фазы. На практике драйвер представляет собой либо дискретные транзисторные переключатели, либо интегральную схему. Оба драйвера и контроллер могут быть объединены в единую интегральную схему, принимающую команду направления и шаговый импульс. Он последовательно выводит ток в соответствующие фазы.
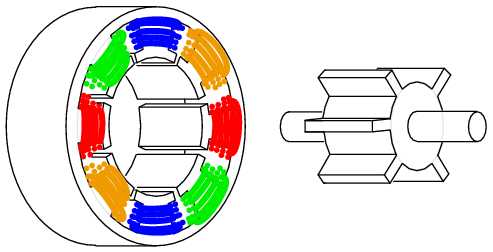 Шаговый двигатель с переменным сопротивлением.
Шаговый двигатель с переменным сопротивлением.
Разберите шагомер нежелательности для просмотра внутренних компонентов. В противном случае мы покажем внутреннюю конструкцию шагового двигателя с переменным сопротивлением на рисунке выше . Ротор имеет выступающие полюса, так что они могут притягиваться к вращающемуся полюсу статора при его переключении. Фактический мотор, намного длиннее нашей упрощенной иллюстрации.
Винт с вилочным захватом с переменным сопротивлением.
Вал часто снабжен винтом. (Рис. Выше ). Это может перемещать головки гибкого диска по команде контроллера флоппи-дисковода.
Шаговые двигатели с изменяемым сопротивлением применяются, когда требуется только умеренный крутящий момент и достаточно грубый угол поворота. Винт-диск, используемый в дисковод гибких дисков, является таким приложением. Когда контроллер включается, он не знает положения каретки. Тем не менее, он может приводить в движение каретку к оптическому прерывателю, калибруя положение, при котором край ножа разрезает прерыватель как «домашний». Контроллер подсчитывает шаговые импульсы из этого положения. Пока момент нагрузки не превышает крутящий момент двигателя, контроллер будет знать положение каретки.
Краткое описание: шаговый двигатель с переменным сопротивлением
- Ротор представляет собой мягкий железный цилиндр с выступающими (выступающими) полюсами.
- Это наименее сложный, самый недорогой шаговый двигатель.
- Шаговый шаговый двигатель без вращающего момента в ручном вращении обесточенного вала двигателя.
- Большой угол поворота
- Вильный штырь часто крепится к валу для линейного ступенчатого движения.
Постоянные магниты
Шаговый двигатель с постоянным магнитом имеет цилиндрический ротор с постоянным магнитом. Статор обычно имеет две обмотки. Обмотки могут быть центрированы, чтобы обеспечить однополярную схему драйвера, где полярность магнитного поля изменяется путем переключения напряжения от одного конца к другому из обмотки. Для питания обмоток без центрального крана требуется биполярный привод с переменной полярностью. Чистый шагомер с постоянным магнитом обычно имеет большой угол шага. Вращение вала обесточенного двигателя демонстрирует момент затяжки. Если угол фиксации большой, например, от 7,5 до 90 o , он, скорее всего, является усилителем с постоянным магнитом, а не гибридным шаговым двигателем (следующий подраздел).
Для шаговых двигателей с постоянными магнитами требуются фазированные переменные токи, применяемые к двум (или более) обмоткам. На практике это почти всегда квадратные волны, генерируемые из постоянного тока твердотельной электроникой. Биполярный привод представляет собой квадратные волны, чередующиеся между полярностями (+) и (-), например, от +2,5 В до -2,5 В. Униполярный привод подает (+) и (-) переменный магнитный поток на катушки, разработанные из пары положительных квадратов Волны, приложенные к противоположным концам отцентрированной катушки. Время биполярной или униполярной волны - волновой привод, полный шаг или половинный шаг.
Волновой привод
Последовательность волнового привода PM (a) φ 1 +, (b) φ 2 +, (c) φ 1 -, (d) φ 2 -.
Концептуально простейшим приводом является волновой привод . (Рис. Выше ). Последовательность поворота слева направо положительна. Φ-1 точка северного полюса ротора вверх, (+) φ-2 точки ротора на север справа, отрицательный φ-1 притягивает ротор к северу вниз, (-) φ-2 точки ротора влево , Приведенные ниже волновые формы показывают, что за один раз возбуждается только одна катушка. Хотя это просто, это не создает столько крутящего момента, как другие приводы.
Форма волны: биполярная волна.
Сигналы (рис. Выше ) являются биполярными, поскольку обе полярности (+) и (-) управляют степпиром. Магнитное поле катушки меняет направление вращения, поскольку полярность тока возбуждения меняется на противоположную.
Волновые формы: однополярный волновой привод.
Сигналы формы (рис. Выше ) являются униполярными, поскольку требуется только одна полярность. Это упрощает электронику привода, но требует в два раза больше драйверов. В два раза больше осциллограмм, потому что требуется пара (+) волн для создания переменного магнитного поля при приложении к противоположным концам отцентрированной катушки. Мотор требует переменные магнитные поля. Они могут быть получены либо однополярными, либо биполярными волнами. Однако моторные катушки должны иметь центральные краны для униполярного привода.
Шаговые двигатели с постоянным магнитом изготавливаются с различными конфигурациями свинцовых проволок. (Рисунок ниже )
Схемы подключения шагового двигателя.
4-проводный двигатель может управляться только биполярными сигналами. 6-проводный двигатель, наиболее распространенный вариант, предназначен для однополярного привода из-за центральных ответвлений. Хотя это может быть вызвано биполярными волнами, если центральные краны игнорируются. 5-проводный двигатель может управляться только однополярными волнами, так как общий центральный кран вмешивается, если обе обмотки подключены одновременно. 8-проводная конфигурация редка, но обеспечивает максимальную гибкость. Он может быть подключен для однополярного привода, как для 6-проводного или 5-проводного двигателя. Пара катушек может быть подключена последовательно для высоковольтного биполярного привода с малым током или параллельно для низковольтного высокоточного привода.
Бифилярная обмотка производится путем намотки катушек параллельно двумя проводами, часто красной и зеленой эмалированной проволокой. Этот метод обеспечивает точное соотношение оборотов 1: 1 для центральных резьбовых обмоток. Этот метод обмотки применим ко всем, кроме 4-проводного устройства выше.
Полный привод
Полный шаговый привод обеспечивает больше крутящего момента, чем волновой привод, потому что одновременно оба катушки включаются. Это привлекает полюсы ротора на полпути между двумя полюсами поля. (Рисунок ниже )
 Полный шаг, биполярный привод.
Полный шаг, биполярный привод.
Полноступенчатый биполярный привод, как показано на рисунке выше, имеет тот же шаг, что и волновой привод. Для однополярного привода (не показан) требуется пара однополярных сигналов для каждого из вышеуказанных биполярных сигналов, применяемых к концам обмотки с центральным ответвлением. Униполярный привод использует менее сложную и менее дорогостоящую схему драйвера. Дополнительная стоимость биполярного привода оправдана, когда требуется больше крутящего момента.
Пошаговый привод
Шаг угла для данной геометрии шагового двигателя разрезается пополам с помощью полушагового привода. Это соответствует удвоенному количеству импульсов на оборот. (Рис. Ниже ). Половина ступеней обеспечивает большее разрешение при размещении вала двигателя. Например, при половинном шаге двигателе, перемещающем печатающую головку на бумаге струйного принтера, будет вдвое больше плотности точек.
 Половина этапов, биполярный привод.
Половина этапов, биполярный привод.
Привод на половину шага представляет собой комбинацию волнового привода и полного шагового привода с одной закрученной обмоткой, за которой следуют оба обмоток, приносящие в два раза больше шага. Ниже приведены однополярные формы сигналов для полушагового привода. Ротор выравнивается с полюсами поля, как для привода волн, так и между полюсами, как для полного шагового привода.
Микросхема возможна со специализированными контроллерами. Изменяя токи на обмотки синусоидально, многие микрошаги могут быть интерполированы между нормальными положениями.
строительство
Конструкция шагового двигателя с постоянным магнитом значительно отличается от чертежей выше. Желательно увеличить число полюсов за пределы, показанное для получения меньшего угла шага. Также желательно уменьшить количество обмоток или, по меньшей мере, увеличить количество обмоток для простоты изготовления.
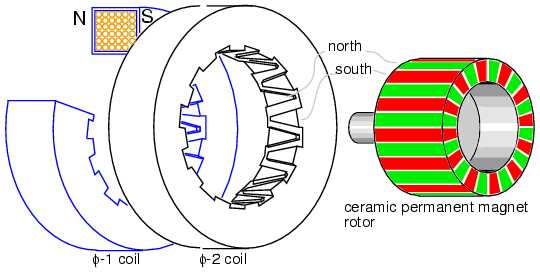 Шаговый двигатель с постоянным магнитом, 24-полюсная конструкция из нержавеющей стали.
Шаговый двигатель с постоянным магнитом, 24-полюсная конструкция из нержавеющей стали.
Шагомер с постоянным магнитом (рис. Выше ) имеет только две обмотки, но имеет 24 полюса в каждой из двух фаз. Этот стиль конструкции известен как может складываться . Фазовая обмотка обертывается мягкой стальной оболочкой, пальцы доставляются в центр. Один этап, на временной основе, будет иметь северную сторону и южную сторону. Каждая сторона обертывается к центру пончика с двенадцатью переплетенными пальцами в общей сложности 24 полюса. Эти чередующиеся пальцы с севера на юг будут привлекать ротор постоянного магнита. Если полярность фазы была обращена вспять, ротор скакал бы 360 o / 24 = 15 o . Мы не знаем, в каком направлении, что не полезно. Однако, если мы активизируем φ-1, за которым следует φ-2, ротор будет двигаться на 7.5 o, потому что φ-2 смещается (поворачивается) на 7.5 o от φ-1. См. Ниже смещение. И, если фазы чередуются, он будет вращаться в воспроизводимом направлении. Применение любой из вышеперечисленных осциллограмм приведет к вращению ротора постоянного магнита.
Обратите внимание, что ротор представляет собой серый ферритовый керамический цилиндр, намагниченный в 24-полюсном образце. Это можно просмотреть с помощью магнитной пленки-зрителя или железных опилок, нанесенных на бумажную упаковку. Хотя, цвета будут зелеными для северного и южного полюсов с пленкой.
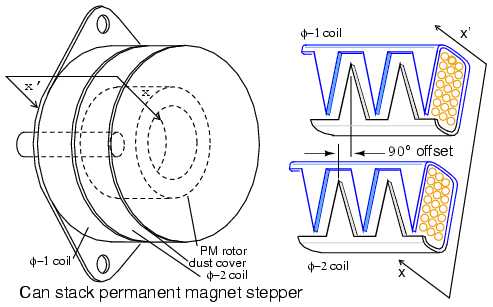 (A) Внешний вид стека, (b) подробная информация о смещении поля.
(A) Внешний вид стека, (b) подробная информация о смещении поля.
Конструкция стиля стека шагового типа шагового генератора является отличительной и легко идентифицируемой уложенными «банками». (Рисунок выше ) Обратите внимание на смещение вращения между двумя фазовыми секциями. Это ключ к тому, что ротор следует за переключением полей между двумя фазами.
Описание: шаговый двигатель с постоянным магнитом
- Ротор - постоянный магнит, часто ферритовый гильза намагничена многочисленными полюсами.
- Конструкция из нержавеющей стали обеспечивает множество полюсов из одной катушки с чередующимися пальцами из мягкого железа.
- Скользящий угол от большой до умеренной.
- Часто используется в компьютерных принтерах для продвижения бумаги.
Гибридный шаговый двигатель
Гибридный шаговый двигатель сочетает в себе функции как шага с переменной степенью сопротивления, так и шагового двигателя с постоянным магнитом для создания меньшего угла шага. Ротор представляет собой цилиндрический постоянный магнит, намагниченный вдоль оси радиальными мягкими железными зубами (рис. Ниже ). Катушки статора наматываются на чередующиеся полюса с соответствующими зубьями. Обычно между фазовыми парами распределены две фазы обмотки. Эта обмотка может быть центрирована для однополярного привода. Центральный кран достигается за счет бифилярной обмотки , пары проводов, повернутых физически параллельно, но проводящихся последовательно. Полюсы север-юг полярности фазовой подстановки, когда ток возбуждения фазы меняется на противоположный. Для несъемных обмоток требуется биполярный привод.
 Гибридный шаговый двигатель.
Гибридный шаговый двигатель.
Обратите внимание, что 48-зубцы на одной секции ротора смещены на половину высоты от другого. См. Подробности полюса ротора. Это смещение зубьев ротора также показано ниже. Благодаря этому смещению ротор эффективно имеет 96 чередующихся полюсов противоположной полярности. Это смещение допускает вращение в 1/96 th шагов вращения, изменяя полярность поля одной фазы. Двухфазные обмотки являются общими, как показано выше и ниже. Хотя, может быть целых пять фаз.
Зубы статора на 8-полюсах соответствуют зубам 48-ротора, за исключением отсутствующих зубьев в пространстве между полюсами. Таким образом, один полюс ротора, скажем, южного полюса, может совпадать с статором в 48 различных положениях. Однако зубы южного полюса смещены от северных зубов на половину зуба. Поэтому ротор может совмещаться с статором в 96 различных положениях. Это смещение половины зуба показано в деталях полюса ротора выше или на рисунке ниже .
Как бы это было недостаточно сложно, основные полюсы статора делятся на две фазы (φ-1, φ-2). Эти фазы статора смещены друг от друга на одну четверть зуба. Эта деталь видна только на принципиальных схемах ниже. В результате ротор движется с шагом четверти зуба, когда фазы чередуются под напряжением. Другими словами, ротор движется в 2 × 96 = 192 шага за оборот для вышеупомянутого шагового устройства.
Вышеприведенный чертеж представляет собой настоящий гибридный шаговый двигатель. Однако мы приводим упрощенное графическое и схематическое представление (рисунок ниже ), чтобы проиллюстрировать детали, не очевидные выше. Обратите внимание на уменьшенное количество катушек и зубьев в роторе и статоре для простоты. На следующих двух рисунках мы попытаемся проиллюстрировать вращение четвертого зуба, вызванное двумя фазами статора, смещенными на четверть зуба, и смещением половины зуба ротора. Квадратное смещение статора зуба в сочетании с синхронизацией тока привода также определяет направление вращения.
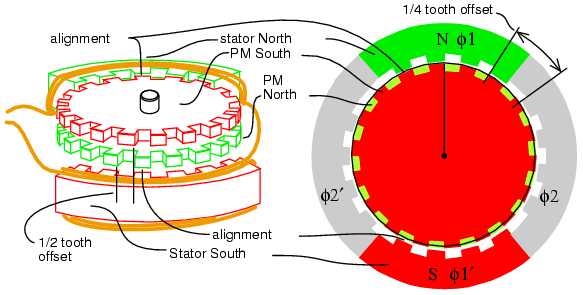 Схема гибридного шагового двигателя.
Схема гибридного шагового двигателя.
Особенности схемы гибридного шагового двигателя (рисунок выше )
- Верх ротора с постоянным магнитом - южный полюс, нижний север.
- Зубы ротора с севера на юг смещены на половину зуба.
- Если статор φ-1 временно находится под напряжением северной вершины, южный дно.
- Верхние зубья статора φ-1 выровнены на север к южным зубам ротора.
- Нижние зубья φ-1 'статора выровнены на юг к северным зубам ротора.
- Достаточный крутящий момент, приложенный к валу для преодоления момента затяжки, приведет к перемещению ротора на один зуб.
- Если полярность φ-1 была изменена на обратную, ротор будет двигаться на половину зуба, неизвестное направление. Выравнивание было бы южным верхом статора до дна северного ротора, северным дном статора до южного ротора.
- Зубцы статора φ-2 не совпадают с зубьями ротора при включении φ-1. Фактически, зубцы φ-2 статора смещены на четверть зуба. Это позволит вращать эту величину, если φ-1 обесточен и φ-2 под напряжением. Полярность φ-1 и привода определяет направление вращения.
 Последовательность вращения гибридного шагового двигателя.
Последовательность вращения гибридного шагового двигателя.
Гибридное вращение шагового двигателя (рис. Выше )
- Верх ротора - это постоянный магнит на юг, внизу север. Поля φ1, φ-2 переключаются: включены, выключены, обратные.
- ( A ) φ-1 = on = north-top, φ-2 = off. Выравнивание (сверху вниз): φ-1 stator-N: ротор-топ-S, φ-1 'stator-S: ротор-снизу-N. Начальное положение, вращение = 0.
- (B) φ-1 = off, φ-2 = on. Выровнять (справа налево): φ-2 stator-N-right: rotor-top-S, φ-2 'stator-S: rotor-bottom-N. Поверните 1/4 зуб, общее вращение = 1/4 зуба.
- (C) φ-1 = reverse (on), φ-2 = off. Выравнивание (снизу вверх): φ-1 stator-S: ротор-нижний-N, φ-1 'статор-N: ротор-топ-S. Поверните 1/4 зуба из последнего положения. Общее вращение от начала: 1/2 зуб.
- Не показано: φ-1 = выключено, φ-2 = обратное (включено). Выровнять (слева направо): общее вращение: 3/4 зуб.
- Не показано: φ-1 = on, φ-2 = off (то же, что и (a)). Выровнять (сверху вниз): общее вращение 1 зуб.
Недействующий шаговый двигатель с крутящим моментом затяжки является либо шаговым двигателем с постоянным магнитом, либо гибридным шаговым двигателем. Гибридный шаговый двигатель будет иметь малый угол поворота, что намного меньше, чем 7,5 ° от постоянных магнитов. Шаг угла может составлять долю в градусах, что соответствует нескольким сотням шагов за оборот.
Описание: гибридный шаговый двигатель
- Шаг угла меньше, чем переменный уровень сопротивления или шаговый двигатель с постоянными магнитами.
- Ротор - это постоянный магнит с тонкими зубцами. Северные и южные зубы смещены на половину зуба для меньшего угла шага.
- Полюсы статора имеют соответствующие тонкие зубцы того же тона, что и ротор.
- Обмотки статора разделены на не менее двух фаз.
- Полюсы одной обмотки статора смещены на четверть зуба для еще меньшего угла шага.
shemabook.ru






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






