
Линейный двигатель — Википедия. Что такое Линейный двигатель
 Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.
Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.

Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
- линейные асинхронные электродвигатели (ЛАД),
- линейные синхронные электродвигатели,
- линейные электромагнитные двигатели,
- линейные магнитоэлектрические двигатели,
- линейные магнитострикционные двигатели,
- линейные пьезоэлектрические (электрострикционные) двигатели и др.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1]
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы.
Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель
 Схема синхронного линейного двигателя.
Схема синхронного линейного двигателя.
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающим 96%.
Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путём, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Линейный двигатель показал высокие характеристики и на металлорежущем оборудовании. Так на шлифовальных станках 3В130Ф4 установлен именно линейный двигатель для изменения положения бабки шлифовальной. На электроэрозионных станках и станках лазерной резки, так же устанавливают линейные двигатели
- Станки для набор электрических схем также требуют решений на линейных двигателях.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.[2]
- Вертикальные линейные двигатели используются для лифтов в высотных зданиях, что позволяет обойтись без затраты энергии на подъем троса кабины лифта.
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности.
Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также, гипотетически, может использоваться в специальных устройствах, таких, как оружие или пусковые установки космических кораблей.
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Ссылки
Линейные электродвигатели
Интересные и широкие перспективы развития электропривода связаны с применением так называемых линейных двигателей.
Большое число производственных механизмов и устройств имеют поступательное или возвратно-поступательное движение рабочих органов (подъемно-транспортные машины, механизмы подач различных станков, прессы, молоты и т. д.). В качестве привода этих механизмов и устройств до недавнего времени использовались обычные электродвигатели в сочетании со специальными видами механических передач (кривошипно-шатунный механизм, передача винт — гайка), преобразовывавших вращательное движение двигателей в прямолинейное движение рабочего органа.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надежность работы привода и производственного механизма в целом.
Специфичность конструкции линейного двигателя определила появление и некоторых специальных терминов, применяемых для обозначения отдельных его частей. В настоящее время еще не принята единая система терминологии, поэтому в технической литературе одинаковый смысл вкладываются в понятия: статор — первичный элемент — индуктор, ротор — вторичный элемент — бегун — якорь — реактивная полоса. Часть двигателя, получающая энергию из сети, названа статором (хотя она не всегда является неподвижной частью), а часть двигателя, получающая энергию со статора, названа вторичным элементом.
Рис. 1. Принцип построения линейного двигателя переменного тока.
Линейные двигатели могут быть асинхронными, синхронными и постоянного тока, повторяя по принципу своего действия соответствующие двигатели вращательного движения.
Наибольшее распространение получили асинхронные линейные двигатели, которые мы и рассмотрим вначале. Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать (рис. 1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это и показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления т:
Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки 3 ротора и индуктирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по известному правилу Ленда, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться с некоторым отставанием (скольжением) от магнитного поля, как и в обычном асинхронном двигателе.
Рис. 2. Линейные двигатели.
а — с длинным вторичным элементом; б — с коротким вторичным элементом; в — двухстаторный; г —с сердечником; 5 — со вторичным элементом в виде полосы.
Представленная на рис. 1 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2,а) или короче его (рис. 2,6). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом.
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто — и в этом одно из достоинств линейного асинхронного двигателя — в качестве вторичного элемента используется металлический лист (полоса), как это показано на рис. 2Д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2,в) или между статором и ферромагнитным сердечником (рис. 2,г). Двигатель с конструктивной схемой, приведенной на рис. 2,6, получил название двигателя с односторонним статором, со схемой по рис. 2,в — с двусторонним статором и со схемой по рис. 2,г — с односторонним статором и сердечником.
Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2,в, г. Некоторое распространение получили составные сложные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Отметим, что линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
Разновидностями линейных асинхронных двигателей являются дуговой и трубчатый (коаксиальный) двигатели.
Рис. 3. Дуговой двигатель.
Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис. 3. Особенностью этого двигателя является зависимость частоты вращения его ротора I от длины дуги, на которой располагаются обмотки 2 статора 3.
Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу сс=2тр, где т — длина полюсного деления и р — число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол. а в течение
а в течение
одной минуты поле повернется на оборотов, т. е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
оборотов, т. е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
Одна из типовых конструкций трубчатого линейного двигателя представлена на рис. 4.
Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении.
Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Рис. 4. Трубчатый (коаксиальный) линейный двигатель.
Рассмотрим теперь несколько типовых практических конструкций линейных асинхронных двигателей в совокупности с производственными механизмами.
Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей. Одно из них, уже отмеченное выше, определяется прямолинейностью движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств.
Рис. 5. Сочленение линейного двигателя с транспортным средством.
Другое, не менее важное обстоятельство связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колес электрического транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5. Линейный двигатель, укрепленный на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укрепленная между рельсами полоса 2. Напряжение на статор двигателя подается с помощью скользящих контактов.
Известны также конструкции линейных двигателей, где вторичным элементом являются рельс или элементы
несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов. На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении. Технические данные этого двигателя следующие: максимальная сила тяги 3800 Н, скорость двигателя 37 км/ч, номинальный ток 200 А, коэффициент полезного действия 50%,коэффициент мощности 0,4. Двигатель питается от трехфазной сети переменного тока частотой 50 Гц и напряжением 380 В.
На рис. 7 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий. Конвейер, предназначенный для перемещения сыпучего материала 1 из бункера 2, имеет металлическую ленту 3, укрепленную на барабанах 4. Металлическая лента проходит внутри статоров 5 линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
Рис. 6. Линейный двигатель для монорельсовой дороги.
Рис. 7. Линейный двигатель для транспортеров.
Большой интерес представляет использование линейного двигателя для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Конструктивная схема такого молота показана па рис. 8. Статор линейного двигателя 1 располагается на стреле молота 2 и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки 3. Ударная часть молота 4 является одновременно вторичным элементом двигателя.
Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки.
Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Широкое распространение получает линейный двигатель и в легкой промышленности, в частности в текстильном производстве. Примером использования линейного двигателя в текстильной промышленности является привод челнока или прокладчика нити ткацкого станка. Идея такого применения линейных двигателей основывается на принципиальной возможности органического объединения функций челнока и вторичного элемента линейного двигателя.
Рис. 8. Линейный двигатель для сваезабивного молота.
Одна из возможных принципиальных схем ткацкого станка показана на рис. 9. Система электропривода образована двумя цилиндрическими статорами 1 и 2,
снабженными концевыми амортизаторами 3. Вторичным элементом является легкий алюминиевый прокладчик 4 с захватом для нити, который перемещается из одного статора в другой по направляющему каналу 5.
При нахождении прокладчика в статоре 1 устройство управления 6 подает напряжение на этот статор таким образом, что образовавшееся бегущее магнитное поле выталкивает прокладчик из статора. Прокладчик по направляющему каналу перелетает в другой статор, прокладывая нить, и тормозится там с помощью работающего в тормозном режиме статора 2 и амортизатора 3. Затем устройство управления переключает статор 2 для образования бегущего поля в направлении статора I, а сам статор 1 — в тормозной режим. Цикл перемещения прокладчика повторяется.

Рис. 9. Линейный двигатель для ткацких станков.
Ткацкие станки, выполненные по этому принципу, отличаются высокой производительностью, простотой автоматизации и удобством в обслуживании.
В настоящее время многие отечественные организации и заводы разрабатывают и серийно выпускают линейные асинхронные двигатели, среди них:
двигатели мощностью от нескольких ватт до 660 кВт со скоростями движения от 1,4 до 42 м/с для систем транспорта;
двухстаторные тяговые двигатели мощностью от 5 до 1000 кВт со скоростью движения 8,4—11,2 м/с для промышленного транспорта и различных производственных механизмов;
одностаторные тяговые двигатели для транспорта мощностью 26, 120 и 660 кВт со скоростью движения соответственно 10, 25,2 и 33,6 м/с;
тяговые двигатели с использованием рельса в качестве вторичного элемента;
линейные микродвигатели переменного и постоянного тока для привода машин легкой промышленности и для самопишущих измерительных приборов.
Таблица 1
| Тип привода-толкателя | Номинальное усилие, Н | Ход штока, м | Время хода, с | Полезная мощность, Вт |
ПТЛ-75 | 750 | 0,15 | 0,33 | 330 |
ЛТЛ-150 | 1500 | 0,25 | 0,56 | 660 |
ПТЛ-300 | 3000 | 0,3 | 0,67 | 1320 |
ПТЛ-100 | 1000 | 0,12 | 0,27 | 441 |
ПТЛ-200 | 2000 | 0,2 | 0,4 | 880 |
ПТЛ-600 | 6000 | 0,4 | 0,89 | 2640 |
В табл. 1 приведены технические данные цилиндрических линейных асинхронных двигателей, исиользуемых в безредукторном приводе-толкателе со скоростью движения штока 0,45 м/с.
Таблица 2
| Тип двигателя | Мощность, кВт | Скорость бегущего поля, м/с | Среднее пусковое усилие, Н | КПД. % | Масса, кг |
ЛАД 1 | 40 | 12 | 450 | 64 | 690 |
ЛАД 2 | 40 | 18 | 600 | 63 | 700 |
ЛАД 3 | 120 | 12 | 1100 | 70 | 870 |
Для привода слитковозов в прокатном производстве разработаны линейные асинхронные двигатели, технические данные которых приведены в табл. 2.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов. Рассмотрим примеры применения этих двигателей.
На рис. 10 показана схема привода продольного хода стола плоскошлифовального станка с использованием линейного двигателя постоянного тока. На столе 1 станка расположен вторичный элемент (якорь) 2 двигателя. Ток к обмоткам якоря подводится через коллектор 3 и щетки 4, установленные на станине 5 станка. На станине по всей длине хода якоря расположены полюсы двустороннего статора 6, при этом станина является одновременно и магнитопроводом двигателя.
На рис. 11 показана еще одна конструктивная схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развернутый в плоскость.

Рис. 11. Линейный двигатель для транспортировки изделий.
Рис. 10. Линейный двигатель для шлифовального станка.
Подвижная часть двигателя — якорь — состоит из немагнитного остова 1 и укрепленной на нем обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путем ее травления. Ширина витков обмотки в направлении движения, как и в обычных двигателях постоянного тока, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токоподвод к обмотке осуществляется с помощью коллектора 3 и щеток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещенных в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сердечники 8 и сама станина, выполненная также из ферромагнитного материала. Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками все время находятся в зазоре между сердечниками 8 и полюсами 6.
На принципе работы линейного двигателя основано действие специальных насосов для перекачки электропроводящих жидкостей и в том числе жидких металлов. Такие насосы, часто называемые магнитогидродинамическими, широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя.
Магнитогидродинамические насосы (МГД-насосы) могут быть постоянного или переменного тока. Конструктивная схема МГД-насоса постоянного тока показана на рис. 12.
Первичным элементом — статором двигателя является С-образный электромагнит 1 (для упрощения рисунка его обмотка возбуждения не показана). В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов 3.
Рис. 12. Магнитогидродинамический насос постоянного тока.
При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле (см. рис. I). Под действием этой силы металл начнет перемещаться по трубопроводу, причем направление его движения просто определить по известному правилу левой руки.
Один из выполненных МГД-насосов этого типа имеет следующие данные: потребляемая мощность 625 кВт, ток 250 000 А, напряжение 2,5 В, КПД 62,5%. Насос обеспечивает транспортировку жидкого натрия при температуре 800°С со скоростью 12,4 м/с по каналу сечением 53×15,2 см2. Номинальный расход насоса 3670 м3/ч при напоре 39 Н/см2.
Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.
Принцип линейного двигателя используется при разработке реактивных плазменных двигателей космических ракет. Модель такого плазменного двигателя можно также изобразить с помощью схемы, приведенной на рис. 12, где место жидкого металла заняла плазма — высокотемпературный (400°С и более) ионизированный и поэтому токопроводящий газ. Электроэнергию для работы такого двигателя предполагается получить с помощью ядерного реактора.
В последние годы все шире используются синхронные линейные двигатели. Основной областью применения этих двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице.
Следует при этом отметить, что применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с так называемой магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Рассмотрим конкретные примеры использования линейных синхронных двигателей для транспорта. На рис. 13 показана схема путепровода и вагона электропоезда со скоростью движения 400—500 км/ч, предназначенного для перевозки 100 пассажиров.
Тяговый синхронный линейный двигатель имеет электромагнитное возбуждение с использованием сверхпроводящих магнитов. Обмотка возбуждения 1 состоит из ряда катушек, равномерно укрепленных под днищем вагона 5. В криогенной системе охлаждения обмоток используется жидкий гелий. Плоская трехфазная обмотка переменного тока 2 уложена в бетонное полотно дороги и питается от трехфазного инвертора, преобразующего напряжение постоянного тока в трехфазное напряжение переменного тока (здесь кратко рассмотрен принцип действия инвертора). С помощью инвертора осуществляются пуск, изменение скорости движения и торможение поезда. Номинальный ток обмотки 250 А; длина секции обмоток, одновременно включаемых на напряжение, 5 км. Номинальная мощность двигателя 5,2 МВт, номинальное тяговое усилие 40 кН, cos φ=0,92, коэффициент полезного действия 72%.
Путепровод 6 представляет собой бетонное полотно шириной 3,7 м, плоский характер поверхности которого выбран с целью снижения накопления льда и снега.
Рис. 13. Линейный синхронный двигатель для привода подвижного состава.
Вагон подвешивается над полотном дороги на высоте 15 см с помощью специальной системы магнитной подвески. Эта система состоит из удлиненных сверхпроводящих электромагнитов 3, расположенных по краям днища вагона, и плоских алюминиевых полос 4, укрепленных в полотне дороги. Принцип работы системы магнитной подвески основывается на действии электродинамических сил, возникающих при взаимодействии потоков сверхпроводящих электромагнитов 3 на борту вагона и вихревых токов, наведенных в алюминиевых полосах 4. Расисты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Для обеспечения поперечной устойчивости поезда при его движении применяется специальная система стабилизации. Она предусматривает укладку дополнительной обмотки (на рисунке не показана) вдоль оси дорожного полотна и основана на взаимодействии токов в этой обмотке с полем тяговых электромагнитов.
Разработанная система электрической тяги с применением описанного выше синхронного линейного двигателя отличается хорошими эксплуатационными показателями, однако для ее работы необходима укладка обмоток в полотно дороги, что удорожает изготовление системы и усложняет ее обслуживание, особенно при значительной протяженности дороги. В связи с этим были разработаны конструкции линейных синхронных двигателей, которые не требуют укладки обмоток в железнодорожное полотно. К их числу относятся линейные синхронные двигатели с так называемым униполярным возбуждением и когтеобразными полюсами. Двигатели того и другого исполнения были использованы для привода 50-тонного состава со скоростью движения 480 км/ч. Параметры двигателей: номинальная мощность 1340 кВт, тяговое усилие 106 Н, частота напряжения переменного тока 350 Гц. Расчетное значение коэффициента мощности равно 1, а коэффициента полезного действия 91— 96%. Масса двигателей при зазоре между составом и вторичным элементом в 1,5 см не превышает 4 т.
Рис. 14. Линейный синхронный двигатель с униполярным возбуждением.
На рис. 14 показана конструктивная схема синхронного линейного двигателя с униполярным возбуждением. Двигатель имеет два статора 1, установленных на подвижной части состава. Бегущее магнитное поле создается с помощью обмоток 2, подключаемых к сети переменного тока. Статоры соединяются магнитопроводом 3, на котором расположена обмотка униполярного возбуждения 4. Эта обмотка создает постоянный по направлению магнитный поток Фп, который пронизывает ферромагнитный вторичный элемент 5, укладываемый в. путепровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создает силу тяги подвижного состава.
Сопоставление линейных синхронных двигателей с униполярным возбуждением и когтеобразными полюсами с асинхронным линейным двигателем на то же тяговое усилие показало, что последний имеет худший коэффициент мощности (около 0,6), более низкий КПД (около 80%) и большую массу на единицу мощности двигателя.
Линейный двигатель — Википедия
 Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.
Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.

Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
- линейные асинхронные электродвигатели (ЛАД),
- линейные синхронные электродвигатели,
- линейные электромагнитные двигатели,
- линейные магнитоэлектрические двигатели,
- линейные магнитострикционные двигатели,
- линейные пьезоэлектрические (электрострикционные) двигатели и др.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1]
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы.
Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель
 Схема синхронного линейного двигателя.
Схема синхронного линейного двигателя.
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающим 96%.
Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путём, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Линейный двигатель показал высокие характеристики и на металлорежущем оборудовании. Так на шлифовальных станках 3В130Ф4 установлен именно линейный двигатель для изменения положения бабки шлифовальной. На электроэрозионных станках и станках лазерной резки, так же устанавливают линейные двигатели
- Станки для набор электрических схем также требуют решений на линейных двигателях.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.[2]
- Вертикальные линейные двигатели используются для лифтов в высотных зданиях, что позволяет обойтись без затраты энергии на подъем троса кабины лифта.
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности.
Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также, гипотетически, может использоваться в специальных устройствах, таких, как оружие или пусковые установки космических кораблей.
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Ссылки
Линейный двигатель — Википедия
 Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.
Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.

Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
- линейные асинхронные электродвигатели (ЛАД),
- линейные синхронные электродвигатели,
- линейные электромагнитные двигатели,
- линейные магнитоэлектрические двигатели,
- линейные магнитострикционные двигатели,
- линейные пьезоэлектрические (электрострикционные) двигатели и др.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1]
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы.
Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель
 Схема синхронного линейного двигателя.
Схема синхронного линейного двигателя.
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающим 96%.
Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путём, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Линейный двигатель показал высокие характеристики и на металлорежущем оборудовании. Так на шлифовальных станках 3В130Ф4 установлен именно линейный двигатель для изменения положения бабки шлифовальной. На электроэрозионных станках и станках лазерной резки, так же устанавливают линейные двигатели
- Станки для набор электрических схем также требуют решений на линейных двигателях.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.[2]
- Вертикальные линейные двигатели используются для лифтов в высотных зданиях, что позволяет обойтись без затраты энергии на подъем троса кабины лифта.
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности.
Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также, гипотетически, может использоваться в специальных устройствах, таких, как оружие или пусковые установки космических кораблей.
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Ссылки
Печатная плата заменяет два линейных двигателя / Хабр
Предлагаемая конструкция показывает, насколько безграничны возможности двух довольно старых изобретений — печатной катушки и линейного двигателя. Одна плата заменяет сразу два таких двигателя. Положите на неё магнит, и он будет перемещаться в двумерном пространстве. Положите несколько — они будут перемещаться синхронно. Новую электронику разрабатывать не придётся, подойдут существующие драйвера шаговых двигателей.
Что потребуется для повторения конструкции:
- плата (100х100х0,6 мм, файлы здесь)
- четыре магнита из неодимового сплава N52 диаметром в 2 мм, соединённые между собой так, как показано на КДПВ
- два драйвера четырёхвыводных шаговых двигателей
- больше ничего (спорное утверждение, «каша из топора» в конечном итоге получится обязательно)
Обратная связь возможна при помощи камеры или датчиков Холла под платой. В подвижную часть можно поместить RFID/NFC и обмениваться с ней данными с неподвижной части. Можно заставить несколько магнитов перемещаться параллельно друг другу, а можно поделить плату на участки с разными наборами печатных катушек, чтобы заставить несколько магнитов перемещаться независимо друг от друга.
Существующий вариант 0,6-миллиметровой платы получился довольно толстым, поэтому катушки верхнего слоя воздействуют на магнит слабее, чем катушки нижнего слоя. То есть, по «иксу» и по «игреку» такая плата будет толкать магнит с различными усилиями. Автор планирует исправить это, сделав плату гибкой — она значительно тоньше.
Посмотрите на плату с двух сторон, насколько она проста:
Проводники на одной стороне перпендикулярны проводникам на другой. Восемь выводов, по четыре на драйвер. И всё.
Опытный односторонний вариант платы, перемещает магниты в одномерном пространстве:
Ещё один опытный вариант с другой конфигурацией печатных катушек, уже двумерный:
А ещё есть плата с катушками для перемещения магнитов по окружности:
От переводчика. Желательно применить плёнку, защищающую от истирания лак и проводники. А воспользовавшись платой не как двигателем, а как генератором, можно получить мышь без кнопок, внутри которой отсутствует электроника.
Линейный двигатель — это… Что такое Линейный двигатель?


Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.

Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например, линейные асинхронные электродвигатели (ЛАД), линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические двигатели, линейные магнитострикционные двигатели, линейные пьезоэлектрические (электрострикционные) двигатели и др. Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающая энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, т.к. слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет). Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2tf. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. [1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель

Схема синхронного линейного двигателя.
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающем 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла. [2]
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели их можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности. Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также в специальных устройствах, таких, как оружие[источник не указан 308 дней] или пусковые установки космических кораблей[каких?].
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Ссылки
Линейный двигатель — Википедия. Что такое Линейный двигатель
 Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.
Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.

Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
- линейные асинхронные электродвигатели (ЛАД),
- линейные синхронные электродвигатели,
- линейные электромагнитные двигатели,
- линейные магнитоэлектрические двигатели,
- линейные магнитострикционные двигатели,
- линейные пьезоэлектрические (электрострикционные) двигатели и др.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1]
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы.
Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель
 Схема синхронного линейного двигателя.
Схема синхронного линейного двигателя.
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающим 96%.
Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путём, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Линейный двигатель показал высокие характеристики и на металлорежущем оборудовании. Так на шлифовальных станках 3В130Ф4 установлен именно линейный двигатель для изменения положения бабки шлифовальной. На электроэрозионных станках и станках лазерной резки, так же устанавливают линейные двигатели
- Станки для набор электрических схем также требуют решений на линейных двигателях.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.[2]
- Вертикальные линейные двигатели используются для лифтов в высотных зданиях, что позволяет обойтись без затраты энергии на подъем троса кабины лифта.
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности.
Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также, гипотетически, может использоваться в специальных устройствах, таких, как оружие или пусковые установки космических кораблей.
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Ссылки
Линейный двигатель
: как это работает?
Что такое линейный двигатель?
Линейный двигатель следует рассматривать как вращающийся электродвигатель, разрезанный по радиальной плоскости и раскрученный. Результирующий двигатель представляет собой линейный электродвигатель с прямым приводом, который может производить линейное движение без необходимости использования пневматики, гидроцилиндров или преобразования вращательного движения в поступательное с использованием ремней или винтов. Роторные двигатели создают крутящий момент, тогда как линейные двигатели создают линейную силу.
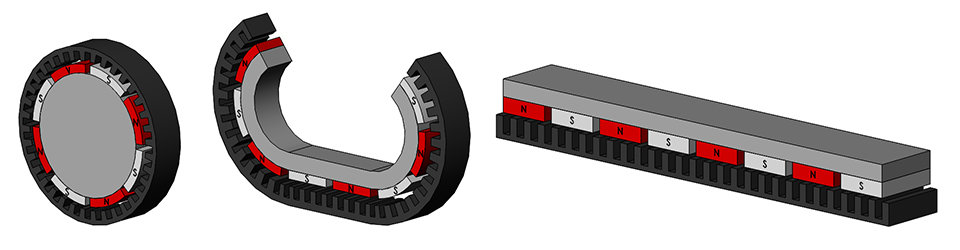
Терминология мостов
Поворотный | Линейная |
Крутящий момент (фунт-дюйм) или [Н-м] | Сила (фунты) или [Н] |
Скорость (об / мин) | Скорость (дюйм / сек) или [м / сек] |
Ускорение (рад / с 2 ) | Ускорение (дюйм / сек 2 ) или [м / сек 2 ] |
Рабочий цикл (%) | Рабочий цикл (%) |
Основные типы линейных двигателей
Поскольку существуют различные типы роторных двигателей переменного и постоянного тока, существуют также различные типы линейных двигателей, в том числе переменного, постоянного тока и шаговые:
| Изображение | Тип позиционирования | Усилие при 100% нагрузке | Усилие при нагрузке 10% | Максимальный ход | Максимальная скорость * | Макс. Ускорение.* | или привод Тип | Тип подшипника | Опции | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Бесщеточный (без железа) |  | Замкнутый контур | 1-200 фунтов [5-900 Н] | 3-600 фунтов [15-2700 Н] | Безлимит | 240 дюймов в секунду [6 м / с] | 12 г | Трехфазный бесщеточный сервопривод, трапециевидный или синусоидальный | Заказчик | Воздушное, водяное охлаждение | |
| Бесщеточный (железный сердечник) |  | Замкнутый контур | 15-1200 фунтов [60-2500 Н] | 45-3600 фунтов [180-7500 Н] | Безлимит | 240 дюймов в секунду [6 м / с] | 12 г | Трехфазный бесщеточный сервопривод, трапециевидный или синусоидальный | Заказчик | Воздушное, водяное охлаждение | |
| Кисть |  | Замкнутый контур | 4-60 фунтов [15-275 Н] | 12–180 фунтов [45–825 Н] | 96 дюймов [2450 мм] | 100 ips [2.5 м / с] | 6 г | Щеточный сервопривод ШИМ | Заказчик | Стационарные кабели водяного охлаждения | |
| Звуковая катушка (подвижная катушка) |  | Открытый и закрытый контур | 0,05-600 фунтов [0,2-4500 Н] | 0,15-1800 фунтов [0,6-13500 Н] | 4 дюйма [100 мм] | 50 дюймов в секунду [1,27 м / с] | 20 г | Сервопривод линейный / ШИМ | Поставлено заказчиком, шариковая втулка | Монтаж, обмотка, преобразователи | |
| Звуковая катушка (подвижный магнит) |  | Открытый и закрытый контур | 0.05-600 фунтов [0,2-4500 Н] | 0,15-1800 фунтов [0,6-13500 Н] | 4 дюйма [100 мм] | 50 дюймов в секунду [1,27 м / с] | 20 г | Сервопривод линейный / ШИМ | Поставлено заказчиком, шариковая втулка | Монтаж, обмотка, преобразователи | |
| Одноосный шаговый двигатель |  | Открытый и закрытый контур | 2-50 фунтов [9-225 Н] | 2-50 фунтов [9-225 Н] | 144 в [3.6 м] | 80 дюймов в секунду [2 м / с] | 1 г | Микрошаговый | Воздух, ролик | Монтаж, кабели, 2 и 4 фазы | |
| Двухосевой шаговый двигатель |  | Открытый и закрытый контур | 1,5-30 фунтов [6-140 Н] | 1,5-30 фунтов [6-140 Н] | 20 x 20 дюймов [0,5 x 0,5 м] | 80 дюймов в секунду [2 м / с] | 1 г | Микрошаговый | Воздух | Монтаж, кабели, 2 и 4 фазы | |
| Линейная индукция |  | Открытый цикл | 1-80 фунтов [4-360 Н] | 5.5-440 фунтов [22-1980 Н] | Безлимит | 1800 ips [45 м / с] | 2 г | Напряжение сети переменного тока, регулируемая частота, векторный привод | Заказчик | Воздушное охлаждение | |
| Полиноид |  | Открытый цикл | 1-9 фунтов [4-40 Н] | 5,5–49,5 фунтов [22–220 Н] | 120 дюйм [3 м] | 270 дюймов в секунду [6 м / с] | 2 г | Напряжение сети переменного тока, регулируемая частота, векторный привод | Заказчик | Воздушное охлаждение | |
* = Максимальные значения зависят от размера двигателя и доступного напряжения на шине.Свяжитесь с заводом-изготовителем, чтобы обсудить требования к применению.
Бесщеточный
Бесщеточные линейные двигатели постоянного тока
обеспечивают бесконтактную работу и не требуют обслуживания. Доступен как в версиях без железа (без зубцов), так и с железным сердечником. Они способны к профилям движения с высокой скоростью и высоким ускорением. Им можно управлять с помощью стандартных трехфазных бесщеточных сервоусилителей. Бесщеточные линейные двигатели могут развивать ускорение до 12 g и скорость более 200 дюймов в секунду [5+ м / с].
Кисть
Линейные двигатели постоянного тока
идеально подходят для сервоприводов с длинным ходом, с открытым или закрытым контуром и с линейным перемещением. Их можно использовать на скоростях до 100 дюймов / сек [2,5 м / сек] и всего 1 дюйм / сек [25 мм / сек]. Они способны очень точно контролировать положение, скорость и ускорение в сочетании с линейным энкодером.
Звуковая катушка
Приводы со звуковой катушкой постоянного тока
идеально подходят для сервоприводов с коротким ходом (обычно менее 2 дюймов) с обратной связью. Их компактный размер позволяет им поместиться в небольших помещениях.У них очень низкие электрические и механические постоянные времени. Малая движущаяся масса обеспечивает быстрое ускорение легких грузов. Они доступны как в версиях с подвижной катушкой, так и с подвижным магнитом.
Линейный шаговый
Линейные шаговые двигатели используются в позиционировании как с разомкнутым, так и с замкнутым контуром. Поскольку устройство позиционирования встроено в форсунку и плиту, дополнительных устройств обратной связи не требуется, что снижает общую стоимость системы. Для работы без обратной связи настройка сервопривода не требуется.На одной плите могут работать несколько толкателей. Для линейных шаговых двигателей типичными являются ускорение 1 g и скорость до 100 дюймов / сек [2,5 м / с]. Доступны как одноосные, так и двухосные версии.
Линейная индукция
Плоский линейный асинхронный двигатель переменного тока (LIM) обычно работает непосредственно от трехфазного сетевого напряжения с регулируемой частотой или с векторным приводом, если требуется регулирование скорости. С LIM возможны ускорения до 1 g со скоростью более 1800 дюймов в секунду [45 м / с].Они идеально подходят для высокоскоростных и длительных путешествий с тяжелыми грузами.
Полиноид
Трубчатый линейный асинхронный двигатель переменного тока (полиноид) обычно работает непосредственно от одно- или трехфазного сетевого напряжения. У полиноидов возможны ускорения более 1 g. Они идеально подходят для работы с коротким ходом и малым рабочим циклом. Их можно использовать для замены пневмоцилиндров, когда сжатый воздух недоступен.
Множители силы на основе рабочего цикла
Основные типы линейных двигателей | Непрерывная сила / область двигателя фунт / дюйм 2 [Н / м 2 ] | Пиковая сила / площадь двигателя фунт / дюйм 2 [Н / м 2 ] |
Линейные двигатели переменного тока | 0.2 | 1 |
Линейные двигатели постоянного тока | 2,5 | 7,5 |
Линейные шаговые двигатели | 2,5 | 7,5 |
Сила линейного двигателя
Как объяснялось, линейные двигатели создают силу (измеряемую в фунтах или ньютонах) вдоль прямой оси для перемещения своей полезной нагрузки.Каждый тип двигателя обеспечивает разные уровни силы.
Сила зависит от рабочего цикла. Рабочий цикл указан в процентах:

Преимущества линейного двигателя
Более быстрое ускорение: От 1 до 10 g; это приводит к сокращению времени цикла и повышению производительности для заказчика.
Высокая скорость: Скорость до 1800 дюймов в секунду [45 м / сек].
Высокая точность: Точность до 0,00004 дюйма / фут [1 мкм / 305 мм].
Очень повторяемость: Повторяемость до 0,00004 дюйма [1 мкм.
Нет люфта: Прямой привод не имеет люфта, такого как у ходовых винтов, шестерен, ременных передач и шестерен.
Высокая жесткость: Линейные двигатели с прямым приводом обеспечивают более высокую жесткость, чем системы с шарико-винтовой парой / ходовым винтом.
Очень плавная работа: Линейные пакеты обеспечивают плавную работу за счет исключения механических связей.
Бесконтактные детали: Это снижает трение и износ компонентов, тем самым сокращая затраты на обслуживание заказчиком.
Длительный срок службы: Можно ожидать неопределенного срока службы при нормальных условиях эксплуатации благодаря простоте и сокращению количества деталей
Низкие затраты на обслуживание: Это помогает снизить общие затраты клиента.
Неограниченный ход: Длина хода не ограничена, как для шарико-винтовых пар. Удлинить обводку легко, просто добавив еще одну секцию.
.
Линейные двигатели | Лидер линейных технологий движения
Когда поступательные движения должны выполняться динамически, с низким коэффициентом трения и высокой гибкостью, пользователи выбирают линейные системы. Ядро системы привода LinMot состоит из управляющей электроники, сервопривода и линейных двигателей.
Двигатели
LinMot представляют собой электромагнитные прямые приводы в трубчатой форме. Поступательное движение осуществляется чисто электрически и без износа, без промежуточного соединения механических редукторов, шпинделей или ремней.Линейный двигатель состоит всего из двух частей: ползуна и статора. Ползунок изготовлен из неодимовых магнитов, закрепленных в высокоточной трубке из нержавеющей стали. Статор содержит обмотки двигателя, подшипники для ползуна, датчики захвата положения и схему микропроцессора для контроля двигателя.
Внутренний датчик положения измеряет и контролирует текущее положение линейного двигателя не только при его остановке, но и во время движения. Отклонения в положении обнаруживаются немедленно и сообщаются контроллеру верхнего уровня.Линейные двигатели LinMot можно свободно позиционировать во всем диапазоне хода. Кроме того, можно точно контролировать как скорость движения, так и ускорение. Для более сложных движений произвольные профили перемещения могут быть сохранены как кривые в сервоприводе и выполнены двигателем с желаемой скоростью.
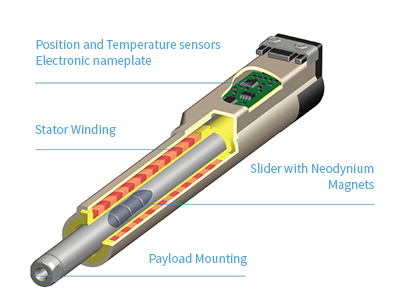
- Свободное позиционирование
- Чрезвычайно динамичный
- Длительный срок службы
- Регулируемая скорость
- Отслеживаемые движения
- Регулируемое ускорение
- Плавные движения
- Программируемое усилие
- Можно синхронизировать
Скорости до 7.3 м / с и ускорение более 780 м / с2 позволяют очень короткое время позиционирования и высокую частоту циклов
Конструкция линейных двигателей делает их стандартными элементами в области проектирования машин, где они обычно используются для замены пневматических приводов и механических кулачковых дисков. С линейными двигателями LinMot и простыми направляющими у инженера есть все компоненты, необходимые для проектирования полных систем линейных приводов.
Стандартные двигатели
Стандартный вариант линейного двигателя может использоваться повсеместно, охватывая широкий спектр приложений.С помощью компактных приводов можно выполнять множество различных задач позиционирования в низковольтном диапазоне. Семейство моторов включает 3 модели с различной длиной статора и хода. Пользователь может выбрать максимальную длину хода 1830 мм и максимальное усилие 1024 Н. Поскольку компоненты двигателя герметизированы, двигатель оптимально защищен даже для интенсивных применений.
- Высокодинамичные приводы
- Широкий диапазон длины хода
- Доступен с кабельным выводом или поворотной угловой вилкой
- Воздушное охлаждение доступно как опция
- Широкий спектр потенциальных применений в системах транспортировки и проектировании машин и систем
HP Двигатели
Линейные высокопроизводительные линейные двигатели обладают значительно большей производительностью, чем стандартные двигатели с тем же размером компонентов и одинаковыми размерами.Это во многом связано с постоянным развитием обмоток двигателя и магнитной цепи, а также с использованием высококачественных материалов.
С двигателями High Performance пользователь имеет доступ к почти удвоенной номинальной производительности. Более высокая производительность в том же форм-факторе позволяет увеличивать мощность существующих машин и систем без проблем, связанных с изменением конструкции.
- Магнитопровод особой прочности
- Повышенная постоянная сила и ускорение
- Допускает более высокие рабочие температуры
- Воздушное охлаждение доступно как опция
- Оптимально для приложений с ограниченной массой компонентов

Короткие моторы
Этот тип двигателя является самым коротким из линейных двигателей LinMot.Короткие двигатели были разработаны специально для приложений с ограниченным пространством. Короткий форм-фактор также означает, что многоосевые приложения могут быть реализованы с несколькими статорами на одном слайдере в очень небольшом пространстве. Чтобы предоставить проектировщику как можно больше вариантов прокладки кабеля, эти двигатели снабжены тремя крышками для вывода кабеля слева, справа или спереди. Кабель двигателя можно вставить под крышку для быстрой и простой установки.
- Короткий форм-фактор с минимальной длиной статора 90 мм
- Встроенный монтажный фланец
- Вставной кабель двигателя с крышкой
- Выбор положения кабельного вывода
- Для использования в условиях ограниченного пространства и многоосных приложений
Линейные двигатели 3x400VAC
Линейные двигатели серии P10 — самые мощные двигатели в семействе продуктов LinMot. Благодаря более высокой производительности и максимальному усилию до 2700 Н двигатели предъявляют повышенные требования к приводным устройствам и сервоприводам.По этой причине LinMot разработала совершенно новую концепцию и полагается исключительно на технологию 3x400VAC и сервоприводы с прямым питанием от сети для этой серии двигателей. В зависимости от области применения двигатели также могут работать от выпрямленного тока 1x230VAC.
Встроенные стандартные энкодеры обеспечивают лучшую интеграцию приводов во внешние системы управления. Таким образом, двигателями можно без проблем управлять приводами любого производителя. Как и в случае с приводами меньшего размера, двигатели оснащены поворотными заглушками IP67.Для различной длины хода существует фиксированная систематически упорядоченная программа слайдеров.
Семейство двигателей P10-54 состоит из компактных трубчатых линейных двигателей средней мощности для задач динамического позиционирования или для замены пневматики. Двигатели, опционально оснащенные энкодером Sin / Cos 1Vpp или инкрементальным энкодером A / B, могут управляться приводами любого производителя.
- Технология 230VAC и 3 x 400VAC
- Пиковое усилие до 335 Н
- Энкодер LinMot или инкрементальный энкодер
- Чрезвычайно высокая динамика
- Поворотный двухтактный разъем TWIN для кабеля питания и кабеля энкодера
- Может также управляться стандартными сервоприводами сторонних производителей
Линейные двигатели серии P10-70 — самые мощные двигатели LinMot для динамических линейных движений.Они могут приводиться в действие приводами любого производителя или сервоприводами LinMot E1400 и C1400.
- Технология 3 x 400 В перем. Тока
- Пиковое усилие до 561 Н
- Чрезвычайно высокая динамика
- Отдельный разъем для датчика и кабеля питания
- Может также управляться стандартными сервоприводами сторонних производителей
Двигатели со встроенной направляющей
Линейные двигатели типа P04 обладают всеми преимуществами трубчатых линейных двигателей и, кроме того, имеют преимущество интегрированной направляющей.
Привод P04 может быть оснащен механическими принадлежностями, известными из пневматики. Это делает замену пневматики еще проще, так как могут быть реализованы все варианты монтажа, известные из пневматики. Благодаря свободному позиционированию и ускорению до 50 м / с2, динамические и точные движения являются основной дисциплиной для этого типа двигателей. Кроме того, поперечные нагрузки воспринимаются встроенным подшипником, поэтому простые приложения, такие как «Pusher», могут быть реализованы без дополнительных компонентов.
- Пиковая сила до 572 Н
- Ход до 150 мм
- Закаленный стержень, способный выдерживать боковую нагрузку
- Монтажное соединение в соответствии с пневматическим цилиндром ISO
- Статор залитый (IP65)
- Идеально для использования в тяжелых условиях
Отчет о применении
Стандартные линейные двигатели
Красивая упаковка
Pick & place с технологией прямого привода
Полный вперед с LinMot
Короткие моторы
Линейные двигатели позволяют роботам-захватам совершать инновационный шаг вперед
.Линейный двигатель
— Линейный двигатель
Линейный двигатель можно представить как роторный электродвигатель, разрезанный по радиальной плоскости и раскрученный. Полученный в результате линейный серводвигатель представляет собой электромагнитный линейный двигатель с прямым приводом, который может производить линейное движение электрически и без соприкосновения с деталями, устраняя люфт, наматывание, износ и проблемы с обслуживанием. Линейное движение создается без использования пневматики, гидроцилиндров или преобразования вращательного движения в поступательное с использованием редукторов, шпинделей, ремней, зубчатой рейки или винтов.
Линейные двигатели в настоящее время используются в роботах, исполнительных механизмах, прецизионных столах / ступенях, оптоволоконных и фотонных системах выравнивания и позиционирования, сборке, системах захвата и размещения, станках, полупроводниковом оборудовании, производстве электроники, системах контроля, требующих гибкого управления с высокой пропускной способностью, системах технического зрения , и во многих других промышленных приложениях управления движением.
h3W Technologies производит большой выбор линейных двигателей и компонентов линейного перемещения.h3W — лидер в технологии линейного перемещения, разрабатывающий двигатели на заказ для различных отраслей и приложений. Мы производим несколько различных типов линейных двигателей, каждый из которых имеет свои преимущества.
Бесщеточный
Бесщеточные линейные двигатели постоянного тока обеспечивают бесконтактную работу и не требуют обслуживания. Доступен как в версиях без железа (без зубцов), так и с железным сердечником. Они способны к профилям движения с высокой скоростью и высоким ускорением. Им можно управлять с помощью стандартных трехфазных бесщеточных сервоусилителей.Бесщеточные линейные двигатели могут развивать ускорение до 12 g и скорость более 200 дюймов в секунду [5+ м / с].
Щетка
Щеточные линейные двигатели постоянного тока идеально подходят для сервоприводов с длинным ходом, открытого или закрытого контура и линейного перемещения. Их можно использовать на скоростях до 100 дюймов / сек [2,5 м / сек] и всего 1 дюйм / сек [25 мм / сек]. Они способны очень точно контролировать положение, скорость и ускорение в сочетании с линейным энкодером.
Звуковая катушка
Приводы со звуковой катушкой постоянного тока идеально подходят для сервоприводов с коротким ходом (обычно менее 2 дюймов) с обратной связью.Их компактный размер позволяет им поместиться в небольших помещениях. У них очень низкие электрические и механические постоянные времени. Малая движущаяся масса обеспечивает быстрое ускорение легких грузов. Они доступны как в версиях с подвижной катушкой, так и с подвижным магнитом.
Линейный шаговый
Линейные шаговые двигатели используются как в приложениях позиционирования с открытым, так и с закрытым контуром. Поскольку устройство позиционирования встроено в форсунку и плиту, дополнительных устройств обратной связи не требуется, что снижает общую стоимость системы.Для работы без обратной связи настройка сервопривода не требуется. На одной плите могут работать несколько толкателей. Для линейных шаговых двигателей типичными являются ускорение 1 g и скорость до 100 дюймов / сек [2,5 м / с]. Доступны как одноосные, так и двухосные версии.
Линейная индукция
Плоский линейный асинхронный двигатель переменного тока (LIM) обычно работает непосредственно от трехфазного сетевого напряжения с регулируемой частотой или с векторным приводом, если требуется регулирование скорости. С LIM возможны ускорения до 1 g со скоростью более 1800 дюймов в секунду [45 м / с].Они идеально подходят для высокоскоростных и длительных путешествий с тяжелыми грузами.
Полиноид
Трубчатый линейный асинхронный двигатель переменного тока (полиноид) обычно работает непосредственно от одно- или трехфазного сетевого напряжения. У полиноидов возможны ускорения более 1 g. Они идеально подходят для работы с коротким ходом и малым рабочим циклом. Их можно использовать для замены пневмоцилиндров, когда сжатый воздух недоступен.
| Изображение | Тип позиционирования | Усилие при 100% нагрузке | Усилие при нагрузке 10% | Максимальный ход | Максимальная скорость * | Макс. Ускорение.* | или привод Тип | Тип подшипника | Опции | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Бесщеточный (Без железа) |  | Замкнутый контур | 1-200 фунтов [5-900 Н] | 3-600 фунтов [15-2700 Н] | Безлимитный | 240 дюймов в секунду [6 м / с] | 12 г | Трехфазный бесщеточный сервопривод, трапециевидный или синусоидальный | Заказчик | Воздушное, водяное охлаждение | |
| Бесщеточный (железный сердечник) |  | Замкнутый контур | 15-1200 фунтов [60-2500 Н] | 45-3600 фунтов [180-7500 Н] | Безлимитный | 240 дюймов в секунду [6 м / с] | 12 г | Трехфазный бесщеточный сервопривод, трапециевидный или синусоидальный | Заказчик | Воздушное, водяное охлаждение | |
| Кисть |  | Замкнутый контур | 4-60 фунтов [15-275 Н] | 12–180 фунтов [45–825 Н] | 96 дюймов [2450 мм] | 100 ips [2.5 м / с] | 6 г | Щеточный сервопривод ШИМ | Заказчик | Стационарные кабели водяного охлаждения | |
| Звуковая катушка (подвижная катушка) |  | Открытый и закрытый контур | 0,05-600 фунтов [0,2-4500 Н] | 0,15-1800 фунтов [0.6-13500 Н] | 4 дюйма [100 мм] | 50 дюймов в секунду [1,27 м / с] | 20 г | Сервопривод линейный / ШИМ | Предоставляется заказчиком, шариковая втулка | Монтаж, обмотка, преобразователи | |
| Звуковая катушка (подвижный магнит) |  | Открытый и закрытый контур | 0.05-600 фунтов [0,2-4500 Н] | 0,15-1800 фунтов [0,6-13500 Н] | 4 дюйма [100 мм] | 50 дюймов в секунду [1,27 м / с] | 20 г | Сервопривод линейный / ШИМ | Предоставляется заказчиком, шариковая втулка | Монтаж, обмотка, преобразователи | |
| Одноосный линейный шаговый двигатель |  | Открытый и закрытый контур | 2-50 фунтов [9-225 Н] | 2-50 фунтов [9-225 Н] | 144 из [3.6 м.] | 80 дюймов в секунду [2 м / с] | 1 г | Микрошаг | Воздух, ролик | Монтаж, кабели, 2 и 4 фазы | |
| Двухосевой линейный шаговый двигатель |  | Открытый и закрытый контур | 1,5-30 фунтов [6-140 Н] | 1.5-30 фунтов [6-140 Н] | 20 x 20 дюймов [0,5 x 0,5 м] | 80 дюймов в секунду [2 м / с] | 1 г | Микрошаг | Воздух | Монтаж, кабели, 2 и 4 фазы | |
| Линейная индукция |  | Открытый цикл | 1-80 фунтов [4-360 Н] | 5.5-440 фунтов [22-1980 Н] | Безлимитный | 1800 ips [45 м / с] | 2 г | Напряжение сети переменного тока, переменная частота, векторный привод | Заказчик | Воздушное охлаждение | |
| Полиноид |  | Открытый цикл | 1–9 фунтов [4–40 Н] | 5.5-49,5 фунтов [22-220 Н] | 120 дюйм [3 м] | 270 дюймов в секунду [6 м / с] | 2 г | Напряжение сети переменного тока, переменная частота, векторный привод | Заказчик | Воздушное охлаждение | |
* = Максимальные значения зависят от размера двигателя и доступного напряжения на шине. Свяжитесь с заводом-изготовителем, чтобы обсудить требования к применению.
.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя. Encyclopdia Britannica, Inc.
Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести моментов цикла.Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке, ток в фазе a является максимально положительным, а в фазах b и c — вдвое отрицательным. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е.е., одна шестая часть цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a имеет положительное значение на половину. В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите эксклюзивный доступ к контенту из нашего первого издания 1768 с вашей подпиской.
Подпишитесь сегодня
Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников.Поскольку проводники ротора закорочены друг с другом на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке показана диаграмма токов ротора за мгновение t 1 рисунка. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора. Encyclopdia Britannica, Inc.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Полный ток статора в каждой фазной обмотке складывается из синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности и до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с использованием катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, поступающий от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
.