ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА. СИНХРОННЫЕ МАШИНЫ. Машины переменного тока синхронные
Синхронная машина переменного тока. Конструкция, режимы работы, механические характеристики. Машины переменного тока синхронные
Синхронные машины переменного тока.
22.Образование вращающегося магнитного поля при двухфазной и трёхфазной системе.
Магнитное поле двухфазной и трехфазной обмотки.
Рассмотрим вращающееся магнитное поле трехфазной обмотки машины переменного тока.
На статоре расположены три катушки, оси которых сдвинуты взаимно на углы 120°. Каждая катушка для наглядности изображена состоящей из одного витка, находящегося в двух пазах (впадинах) статора.
В действительности катушки имеют большое число витков. Буквами А, В, С обозначены начала катушек, X Y, Z - концы их. Катушки соединены звездой, т. е. концы X, Y, Z соединяются между собой, образуя общую нейтраль, а начала А, В, С подключаются к трехфазной сети переменного тока. Катушки могут соединяться и треугольником.
По катушкам протекают синусоидальные токи с одинаковым амплитудами Im и частотой щ = 2рf, фазы которых смещены на 1/3 периода.
Токи, протекающие в катушках, возбуждают переменные магнитные поля, магнитные линии которых будут пронизывать катушки в направлении, перпендикулярном их плоскостям. Следовательно, средняя магнитная линия или ось магнитного поля, создаваемого катушкой А - X, будет направлена под углом 90° к плоскости этой катушки.
Направления магнитных полей всех трех катушек показаны векторами ВА, ВВ и ВС, сдвинутыми один относительное другого также на 120°.
Условимся считать положительными направления токов в катушках от начала к концу обмотки каждой фазы.
При этом в проводниках статора, подключенных к начальным точкам А, В, С, токи, принятые положительными, будут направлены на зрителя, а в проводниках, подключенных к конечными точкам X, Y и Z,- от зрителя.
Положительным направлениям токов будут соответствовать положительные направления магнитных полей, показанные на том же рисунке и определяемые по правилу буравчика.
Не касаясь количественной стороны явления, определим сначала направления магнитного поля, созданного трехфазной обмоткой для различных моментов времени.
В момент t= 0 ток в катушке А - X равен нулю, в катушке В - Y отрицателен, в катушке С -Z положителен. Следовательно, в этот момент тока в проводниках А и X нет, в проводниках С и Z он имеет положительное направление, а в проводниках B и Y - отрицательное направление.
Назначение машин переменного тока.
Синхронные машины – это бесколлекторные машины переменного тока, имеющие синхронную частоту вращения ротора, т. е. у них частота вращения ротора равна частоте вращения магнитного поля статора. В промышленности и на железнодорожном транспорте синхронные машины используют в основном как генераторы; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на тепловозах, автомобилях, самолётах. В первом случае мощностью до 1200 МВт, во втором – до 4400 кВт. В зависимости от типа привода различают турбогенераторы, гидрогенераторы и дизель-генераторы. Синхронные машины также используются и в качестве электродвигателей при мощности 100 кВт и выше для приводов насосов, компрессоров, вентиляторов и других механизмов.
Работа синхронной машины основана на явлении электромагнитной индукции и заключается в преобразовании механической энергии в электрическую энергию переменного тока (генераторы) или электрической энергии переменного тока в механическую (двигатели), т. е. синхронная машина обладает обратимостью.
Синхронная машина состоит из неподвижной части – статора, в пазах которого расположена многофазная (как правило, трёхфазная) обмотка и вращающейся части – ротора с обмоткой возбуждения, питаемой от источника постоянного тока (возбудителя) через контактные кольца и щётки. Синхронная машина может работать автономно в качестве генератора, питающего подключенную к ней нагрузку, или параллельно с сетью, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т. е. работать генератором или двигателем. При подключении обмотки статора к сети с напряжением U1 и частотой f1 проходящий по обмотке ток создаёт вращающееся магнитное поле, частота вращения которого
n1 = 60×f1/p.
В результате взаимодействия этого поля с током возбуждения Iв, проходящим по обмотке ротора, создаётся электромагнитный момент М, который при работе машины в двигательном режиме является вращающим, а при работе в генераторном режиме – тормозным. В установившемся режиме ротор неподвижен относительно магнитного поля и вращается с частотой вращения n1 = n2, где n2 - частота вращения ротора. Таким образом, в установившемся режиме ротор машины постоянного тока вращается с постоянной частотой, равной частоте вращающегося магнитного поля.
1 — сердечник статора, собранный из листовой электротехнической стали, 2 — трехфазная обмотка статора, включаемая в сеть переменного тока, 3 — сердечник ротора, 4 — фазная обмотка ротора, 5 — контактные кольца для соединения с пусковым или регулировочным реостатом, 6 — короткозамкнутая обмотка ротора.
studfiles.net
Электрические машины переменного тока
Машины переменного тока подразделяются на синхронные и асинхронные. Асинхронные машины используются в основном, как двигатели. В режиме торможения они работают как генераторы. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели преимущественно применяются в качестве привода мощных производственных машин.
Асинхронная машина– такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотойf1, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростьюn2отличающейся от скорости вращения магнитного поляn1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращен
xn--90adflmiialse2m.xn--p1ai
Электрические машины переменного тока
Электрические машины переменного тока. Назначение, область применение, устройство принцип действие машин.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. У синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения "синхронна" с частотой тока. Не трудно догадаться, что у асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока. Кроме деления на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения. Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле то есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращение ротора происходит с частотой изменения тока.
Формула 1 — зависимость частоты вращения ротора синхронной машины от частоты переменного тока. где n это частота, с которой вращается ротор, измеряется в оборотах в минуту. То есть, сколько полных оборотов совершит ротор за одну минуту. f частота питающего переменного тока p количество пар полюсов у магнитной системы машины
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными.
Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания. Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами c1,c2,c3, концы – c4,c5,c6.
Начала и концы фаз выведены на клеммник, закреплённый на станине. Обмотка статора может быть соединена по схеме звезда или треугольник. Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл=660В по схеме звезда или в сеть с Uл=380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов:короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
Короткозамкнутая обмотка ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
Однафазные асинхронные двигатели.
Асинхронный двигатель является простейшей из электрических машин. Как и любая электрическая машина, он имеет две основные части: статор и ротор.
Статор (рис. 6.1) состоит из чугунной станины 1, в которой закреплен магнитопровод 2 в виде полого цилиндра. Между станиной и сердечником обычно оставляют зазор, через который проходит охлаждающий воздух. Для уменьшения потерь на вихревые токи магнитопровод набирают из тонких (0,5 мм) листов электротехнической стали, изолированных друг от друга лаком.
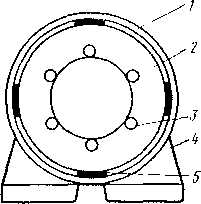
Рис. 6.1. Конструкция статора асинхронного двигателя:
1 — станина; 2 — сердечник; 3 — обмотка;
4 — лапа; 5 — прокладка
В пазы, вырезанные по внутренней окружности статора, укладывают обмотку 3. У двухполюсной машины обмотка статора состоит из трех катушек, сдвинутых на углы 120°, у четырехполюсной — из шести катушек, сдвинутых на 60°, у шестиполюсной — из девяти катушек и т. д. Обмотку в пазах статора закрепляют клиньями.
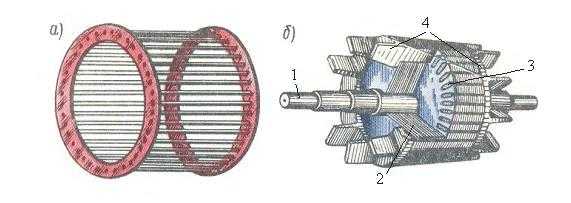
Ротор также набирают из тонких листов электротехнической стали. В пазах ротора размещают обмотку, которая может быть короткозамкнутой или фазной (рис. 6.2). Короткозамкнутая обмотка типа
Рис. 6.2. Общий вид ротора асинхронного двигателя с коротко- замкнутой (а) и фазной (б) обмотками
«беличья клетка» изображена на рис. 6.3. Она состоит из толстых проводящих стержней (медь, алюминий), соединенных по торцам медными или алюминиевыми кольцами. Короткозамкнутая обмотка не изолируется от ротора. Иногда ее изготовляют заливкой расплавленного алюминия в пазы ротора.
Контактные кольца1, изготовленные из латуни или меди, укрепляют на валу двигателя с помощью изолирующих прокладок. Щеткодержатель с угольными или медно-графитовыми щетками 2 крепят на подшипниковом щите.
Рис. 6.3. Общий вид коротко- замкнутой обмотки типа «беличья клетка»
Рис. 6.4. Схема соединения фазной обмотки ротора с регулировочными реостатами:
1 —'контактные кольца, 2— щетки; 3 — реостаты
Общий вид асинхронного двигателя показан на рис. 6.5.

Рис. 6.5. Общий вид асинхронного двигателя с короткозамкнутой (а) и фазной (б) обмотками ротора
Принцип действия асинхронного двигателя.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и основных законов электротехники.
При включении двигателя в сеть трехфазного тока в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают стержни или катушки обмотки роторо. При этом, согласно закону электромагнитной индукции, в обмотке ротора индукциреутся ЭДС, пропорциональная частоте пересечения силовых линий. Под действием индуцированной ЭДС в короткозамкнутом роторе возникают значительные токи.
В соответствии с законом Ампера на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т. е. пересечение стержней обмотки ротора силовыми линиями вращающегося поля. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки ротора магнитными силовыми линиями.
Достичь частоты вращения поля в реальных условиях ротор не может, так как тогда стержни его обмотки оказались бы неподвижными относительно магнитных силовых линий и индуцированные токи в обмотке ротора исчезли бы. Поэтому ротор вращается с частотой, меньшей частоты вращения поля, т. е. несинхронно с полем, или асинхронно.
Если силы, тормозящие вращение ротора, невелики, то ротор достигает частоты, близкой к частоте вращения поля. При увеличении механической нагрузки на валу двигателя частота вращения ротора уменьшается, токи в обмотке ротора увеличиваются, что приводит к увеличению вращающего момента двигателя. При некоторой частоте вращения ротора устанавливается равновесие между тормозным и вращающим моментами.
Синхронный двигатель
Устройство статора синхронного двигателя аналогично устройству статора асинхронного двигателя. Ротор синхронного двигателя представляет собой электромагнит или постоянный магнит (рис. 6.6).
Принцип работы синхронного двигателя поясняется рис. 6.7. Внутри магнита N1 S1 помещен магнит NS. Если магнит N1 S1 вращать, то он потянет за собой магнит NS. В стационарном режиме частоты вращения обоих магнитов одинаковы.
К валу магнита NS можно приложить механическую нагрузку. Чем больше эта нагрузка, тем больше угол отставания оси магнита NS от оси магнита NiSi. При некоторой нагрузке силы притяжения между магнитами будут преодолены и ротор остановится.
В реальном двигателе поле магнита N1 S1 заменено вращающимся магнитным полем статора; при этом ротор либо вращается синхронно с магнитным полем статора, отставая на угол , либо останавливается (выпадает из синхронизма) при перегрузке. Таким образом, независимо от нагрузки ротор всегда вращается с постоянной частотой, равной частоте вращения магнитного поля статора:
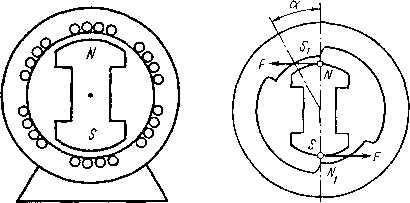
Рис. 6.6. Схематическое изображение Рис. 6.7. К пояснению принципа синхронного двигателя работы синхронного двигателя
Постоянство частоты вращения — важное достоинство синхронного двигателя. Строгое постоянство частоты вращения требуется во многих областях техники, например при записи и воспроизведении звука. Недостаток синхронного двигателя — трудность пуска: для пуска нужно раскрутить ротор в сторону вращения поля статора. Для этого чаще всего применяют специальную короткозамкнутую обмотку, вделанную в ротор. В момент пуска двигатель работает как асинхронный. Когда частота вращения ротора приближается к частоте вращения поля статора, ротор входит в синхронизм и двигатель работает как синхронный. Короткозамкнутая обмотка при этом оказывается обесточенной, так как частота вращения ротора равна частоте вращения поля статора и стержни обмотки ротора не пересекаются магнитными силовыми линиями.
В настоящее время существует тенденция замены на подвижных объектах (корабли, самолеты, автомобили) электрических цепей постоянного тока цепями переменного тока повышенной частоты (200, 400 Гц и выше). Возможность использования бесколлекторных машин переменного тока, трансформаторов и магнитных усилителей позволяет повысить надежность работы цепи, а также уменьшить габариты и массу машин и аппаратов.
При оборудовании объекта сетью переменного тока широкое применение находит электропривод на переменном токе. Разработаны схемы с асинхронными и синхронными двигателями, которые позволяют выполнить все операции, осуществляемые ранее двигателями постоянного тока.
Преимущества асинхронных двигателей особенно заметны тогда, когда по условиям работы привода нет необходимости в плавном регулировании частоты вращения в широких пределах и больших пусковых моментах (привод насосов, вентиляторов и др.).
Синхронные двигатели особенно удобны для привода роторов гироскопов. В тех случаях, когда гироскоп используют для особо точных измерений (например, в баллистических ракетах), приводом ротора гироскопа служит синхронный двигатель. При этом частота вращения ротора зависит только от конструкции двигателя и частоты питающего тока, которую можно стабилизировать с очень высокой степенью точности.
Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем (отсюда их название). Поскольку частоты вращения ротора и магнитного поля одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока.
Устройство статора синхронной машины (рис. 6.8) практически не отличается от устройства статора асинхронной машины.
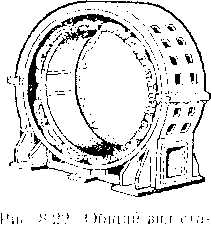
Рис 6.8. Общий вид статора синхронного генератора.
Рис 6.9. Общий вид неявнополюсного ротора синхронного генератора.
Роторы синхронных генераторов могут быть явнополюсными (рис. 6.9) и неявнополюсными (рис. 6.10). В первом случае синхронные генераторы приводятся в действие тихоходными турбинами гидроэлектростанций, во втором — паровыми или газовыми турбинами теплоэлектростанций.
Рис. 6.10. Общий вид неявнополюсного ротора синхронного генератора
Используют различные способы возбуждения синхронных генераторов. Широкое распространение получил синхронный генератор с машинным возбудителем, представляющим собой генератор постоянного тока, расположенный на одном валу с синхронным генератором. Машинный возбудитель приводится в действие от того же первичного двигателя, что и синхронный генератор. Выходные зажимы возбудителя через щетки и кольца подсоединены к обмотке ротора синхронного генератора. Напряжение синхронного генератора можно регулировать реостатом в цепи обмотки возбуждения возбудителя, что удобно и энергетически выгодно, так как в этой обмотке протекают сравнительно небольшие токи.
Находят также применение генераторы с самовозбуждением через полупроводниковые или механические выпрямители.
Из характеристик синхронного генератора наибольший практический интерес представляют внешние характеристики, выражающие зависимость напряжения на зажимах генератора от тока нагрузки при неизменных значениях тока возбуждения, частоты и коэффициента мощности.
infourok.ru
3.2. Синхронные электрические машины переменного тока.
Синхронная машина состоит из вращающегося ротора, на котором имеются магнитные полюса и неподвижного изготовленного из пластин статора, в котором уложена трехфазная обмотка со сдвигом между фазами на 1200 (рис.3.5).
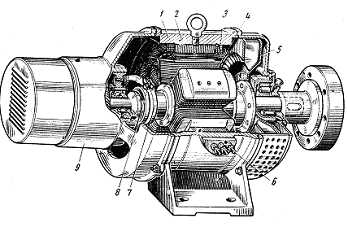
Рис.3.5. Устройство синхронной машины: 1- корпус; 2- сердечник статора; 3- обмотка статора; 4- ротор; 5- вентилятор; 6 – выводы обмоток статора; 7 – контактные кольца; 8 – щитки; 9 – возбудитель.
Магнитные полюса ротора могут образовываться постоянными магнитами, но чаще обмотками возбуждения, питаемыми постоянным током через укрепленные на валу изолированные кольца и щетки. Искрение щеток практически отсутствует т.к. кольца сплошные, а ток возбуждения мал. Число пар полюсов может быть большое, особенно для тихоходных мощных гидрогенераторов (до десятков).
Зазор между наконечником полюса и статором делается увеличивающимся к концам полюса, чтобы при вращении полюса в обмотке статора возникает ЭДС синусоидальной формы.
Частота синусоиды равна частоте вращению ротора, умноженной на число пар полюсов. При одной паре полюсов для 50 Гц необходима частота вращения 3000об/мин, при 50 пар полюсов всего 60 об/мин. При подключении нагрузки и протекании тока в обмотке возникает тормозящая сила  , которая должна преодолеваться двигателем.
, которая должна преодолеваться двигателем.
Синхронный генератор после подключения к сети (фазировка) работает синхронно с сетью. При малейшем увеличении скорости ротора ЭДС превышает напряжение сети, ток сильно увеличивается и тормозящая сила возрастает, при уменьшении скорости ротора ЭДС меньше напряжения сети, ток меняет направление, сила становится ускоряющей и генератор переходит в режим двигателя. Ротор синхронного двигателя может вращаться лишь со скоростью, равной скорости вращения магнитного поля статора.
При отсутствии синхронизма над данным магнитным полюсом ротора будут поочередно проходить токи разных направлений, и средняя сила будет равна нулю. Это является недостатком синхронных двигателей, которые при резком торможении выпадают из синхронизма.
Для пуска синхронных двигателей ротор надо предварительно привести во вращение со скоростью, близкой к синхронной. Для этого либо используется вспомогательный разгонный двигатель, либо используют преобразователь частоты с плавным ее повышением от нуля. Используют также так называемый асинхронный пуск, когда в ротор располагают продольную короткозамкнутую обмотку и в момент пуска двигатель работает как асинхронный, а при скорости, близкой к синхронной включают ток возбуждения полюсов. Заметим, что в синхронном режиме асинхронная короткозамкнутая обмотка не работает, т.к. вращающее магнитное поле статора ее не пересекает.
Из-за всех этих сложностей синхронные двигатели применяются редко, но в последнее время их применение возрастает из-за емкостного характера их нагрузки, особенно при перевозбуждении или вообще при отключении нагрузки. Имеются специальные синхронные компенсаторы, не имеющие выходного конца вала для нагрузки.
Емкостной характер нагрузки синхронного двигателя и синхронного компенсатора при перевозбуждении, когда магнитная цепь работают в режиме насыщения, объясняется опережением ЭДС относительно внешнего напряжения при нелинейной кривой намагничивания.
Влияние тока нагрузки генератора на магнитный поток и ЭДС аналогично реакции якоря машины постоянного тока. В ненасыщенном режиме и при чисто активной нагрузке магнитный поток обмотки статора перпендикулярен потоку ротора и не ослабляет его. При чисто индуктивной нагрузке реакция статора размагничивающая, при чисто емкостной – намагничивающая, увеличивающая магнитный поток ротора и ЭДС генератора. Кроме основных магнитных потоков в машине необходимо учитывать еще поток рассеяния обмотки статора как и поток рассеяния обмотки возбуждения.
Нагрузочные и регулировочные характеристики синхронного генератора приведены на рисунке 3.6.
Рис. 3.6. Внешние а) и регулировочные б) характеристики синхронного генератора:
1- при активной нагрузке; 2 - при индуктивной нагрузке; 3 - при емкостной нагрузке
Асинхронные машины (двигатели).
Асинхронная машина (рис. 3.7) состоит из статора с трехфазной обмоткой, создающее вращающее магнитное поле (аналогично синхронной машине) и вращающегося ротора с короткозамкнутой продольной обмоткой (беличья клетка) (рис. 3.8).

Рис. 3.7. Конструкция трехфазного асинхронного двигателя: 1 - ротор; 2 - статор с обмоткой; 3 - клемная коробка; 4 -корпус; 5 – подшипниковый щит; 6 - колпак вентилятора; 7 – вентилятор; 8 – подшипник.
Рис.3.8. Короткозамкнутая клетка – а; ротор с обмоткой из алюминия б.
Статор и ротор изготавливают из пакетов листов электротехнической стали с зазором между статором и ротором 0,1 – 1,5 мм в зависимости от размера и мощности двигателя.
В машинах большой мощность обмотка ротора не замкнута, а имеет 3 вывода, подключенных к контактным кольцам для регулировки тока в роторе (фазные роторы).
Число оборотов вращающегося магнитного поля определяется частотой трехфазной сети, деленной на число трехфазных пар полюсов. Число оборотов ротора должно всегда быть меньшим, чтобы вращающиеся магнитное поле пересекало обмотку ротора. Тогда в ней возникает ЭДС , где , где- угловая скорость скольжения – разность угловых частот магнитного поля и ротора,
, где- угловая скорость скольжения – разность угловых частот магнитного поля и ротора, - радиус обмотки ротора. Так как обмотка ротора короткозамкнутая, то в ней протекает ток
- радиус обмотки ротора. Так как обмотка ротора короткозамкнутая, то в ней протекает ток , гдеRi – внутреннее сопротивление обмотки – очень малая величина. При протекании тока в магнитном поле на ротор действует вращающая сила . Чем больше скольжение, тем больше ток и следовательно, вращающий момент, максимальный при пуске, когда
, гдеRi – внутреннее сопротивление обмотки – очень малая величина. При протекании тока в магнитном поле на ротор действует вращающая сила . Чем больше скольжение, тем больше ток и следовательно, вращающий момент, максимальный при пуске, когда , а величина, называемая скольжением
, а величина, называемая скольжением . В рабочем режиме скольжение мало и составляет 3-7% и для однополюсной машины номинальное число оборотов 2800-2850 об/мин приfстатора=3000об/мин.
. В рабочем режиме скольжение мало и составляет 3-7% и для однополюсной машины номинальное число оборотов 2800-2850 об/мин приfстатора=3000об/мин.
Ток ротора создает магнитное поле (за исключением поля рассеяния), размагничивающее поле статора, что увеличивает ток в статоре, так что суммарный магнитный поток остается примерно постоянным. При короткозамкнутом роторе коэффициент трансформации обратно пропорционален числу витков первичной обмотки статора  , а сопротивление вторичной обмотки
, а сопротивление вторичной обмотки . Эквивалентная схема и векторная диаграмма асинхронного двигателя аналогична трансформатору.
. Эквивалентная схема и векторная диаграмма асинхронного двигателя аналогична трансформатору.
Рассмотрим зависимость вращающего момента от скольжения при постоянном напряжении на статоре (рис.3.9).
Рис. 3.9. График зависимости электромагнитного момента
асинхронного двигателя от скольжения.
При нулевом скольжении магнитный поток не пересекает обмотку ротора. Нет тока в роторе и вращающей силы и ее момента. При некотором скольжении, называемом критическим, механический момент достигает максимума. При дальнейшем увеличении скольжения вплоть до остановки двигателя момент медленно снижается из-за роста потерь в роторе и статоре, хотя ток в статоре продолжает увеличиваться.
Устойчивая работа двигателя может быть только при скольжении меньше критического, что является недостатком асинхронных двигателей. Другим недостатком является сильная зависимость момента от напряжения сети (М~U12).
studfiles.net
|
Поиск Лекций
3.1. Общие сведения Электромагнитная схема синхронной машины имеет вид (рис3.1): Рис. 3.1. Электромагнитная схема синхронной машины (а) и схема ее включения (б) Важным отличием синхронной машины от асинхронной является то, что главный магнитный поток в ней создается НС постоянного тока возбуждения Iв , который машина получает от источника Uв, т. е. в машине имеет место раздельное питание обмоток статора и ротора. Статор машины выполнен аналогично статору асинхронной машины. На нем расположена -фазная (обычно трехфазная) обмотка. Обмотка ротора 4 состоит из одной или нескольких катушек, образующих многополосную систему с тем же числом пар полюсов р, что и обмотка статора 3. Обмотка ротора соединяется с внешним источником питания Uв посредством контактных колец 5 и щеток 6. При вращении ротора со скоростью n2 в обмотке статора индуктируется ЭДС , изменяющаяся с частотой где p - число пар полюсов машины. При подключении обмотки статора к какой-либо нагрузке в ней протекает многофазный ток, который создает вращающееся магнитное поле. Скорость вращения этого поля: Из приведенных выше выражений следует n1=n2, т. е. магнитные поля ротора и статора вращаются с одинаковой скоростью. Поэтому рассматриваемая машина получила название синхронной. В синхронной машине результирующий магнитный поток Фрез создается совместным действием намагничивающих сил обмотки возбуждения и обмотки статора и вращается с той же скоростью, что и ротор. Часть электрической машины, в которой индуктируется ЭДС, принято называть якорем, поэтому в синхронной машине статор является якорем, а ротор - индуктором. Синхронная машина может работать в качестве автономного генератора, питающего подключенную к ней нагрузку, а так же подключаться параллельно к сети, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т.е. работать генератором или двигателем. В результате взаимодействия тока ротора Iв с вращающимся магнитным полем, создается электромагнитный момент, который при работе машины в двигательном режиме является вращающим, а в генераторном - тормозящим. Таким образом, синхронная машина имеет следующие особенности: - ротор машины, как в двигательном, так и в генераторном режимах, вращается с постоянной скоростью, равной скорости вращения магнитного поля; - частота изменения ЭДС Е1, индуктируемой в обмотке статора, пропорциональна скорости вращения ротора; - в обмотке ротора ЭДС не индуктируется, а магнитное поле создается постоянным током, подводимым от внешнего источника, или постоянными магнитами.
38 принцип работы синхронного генератора. Уравнение электрического состояния фазы статора. Угловая, внешняя и регулировочная характеристика. В синхронных машинах частота вращения ротора равна частоте вращения магнитного поля статора и, следовательно, определяется частотой тока сети и числом пар полюсов, т. е. n = 60f/p и f = pn/60.Как и всякая электрическая машина, синхронная машина обратима, т. е. может работать как генератором, так и двигателем.Электрическая энергия вырабатывается синхронными reнераторами, первичными двигателями которых являются либо гидравлические, либо паровые турбины, либо двигатели внутреннего cгорания. Обычно обмотки возбуждения получают энергию от возбудителя, который представляет собой генератор постоянного тока. Возбудитель находится на одном валу с рабочей машиной, и мощность его составляет малую величину, порядка 1 - 5% мощности синхронной машины, возбуждаемой им.При небольшой мощности часто используются схемы питания обмоток возбуждения синхронных машин от сети переменного тока через полупроводниковые выпрямители.Простейшим генератором может быть виток из провода 1 и 2, вращающийся в магнитном поле (изо). Магнитное поле возбуждается током обмотки возбуждения, помещенной на полюсах статора N - S.При вращении витка проводники 1 и 2 пересекают магнитное поле, созданное между полюсами N - S, вследствие чего в витке будет индуктироваться эдс.Концы витка соединены с кольцами 3, вращающимися вместе с витком. Если на кольцах поместить неподвижные щетки и соединить их с приемником электрической энергии, то по замкнутой цепи, состоящей из витка, колец, щеток и приемника энергии, пойдет электрический ток под действием эдс.Полученная в таком простейшем генераторе эдс будет непрерывно изменяться в зависимости от положения витка в магнитном поле. Когда проводники 1 и 2 находятся под осями полюсов (см. изо), то при вращении витка они пересекают в единицу времени наибольшее число линий магнитного поля. Следовательно, в данный момент индуктируемая в витке эдс будет иметь наибольшее значение.В дальнейшем при повороте витка изменится число линий магнитного поля, пересекаемых в единицу времени проводниками 1 и 2. При повороте витка на 90° в пространстве проводники будут перемещаться в вертикальном направлении, совпадающем с направлением магнитных линий поля. Следовательно, проводники 1 и 2 не пересекают магнитных линий и эдс в витке равна нулю.
39 работа синхронной машины в режиме двигателя. Принцип действия. Зависимость электромагнитного момента от тока возбуждения. Синхронная машина, работающая параллельно с сетью, автоматически переходит в двигательный режим, если к валу ротора приложен тормозной момент. При этом машина начинает потреблять из сети активную мощность и возникает электромагнитный вращающий момент.Частота вращения ротора остается неизменной, жестко связанной с частотой сети по соотношению п2 = п1 = 60f1/p, что является важнейшим эксплуатационным свойством синхронных двигателей. Векторные диаграммы. По основным комплексным уравнениям синхронной машины (6.15 и 6.21) могут быть построены векторные диаграммы. Однако для синхронного двигателя в приведенные уравнения вместо напряжения машины Ú, надо подставить —Úс , так как термин «напряжение двигателя» обычно не употребляется; при этом для неявнополюсной и явнополюсной машин имеем Построение векторных диаграмм (рис. 6.45, а и б) по формулам (6.45) рекомендуется начинать с изображения векторов Úc и - Úc . Затем строится вектор тока Íа , активная составляющая которого совпадает с направлением вектора Úc , и определяется вектор É0 . При построении диаграммы для явнополюсной машины (рис. 6.45,б) нужно также (по аналогии с построением диаграммы для генератора, см. рис. 6.26, в) сначала определить направление вектора É0 , прибавив к - Úc вспомогательный вектор jÍа Xq . Чтобы выяснить свойства синхронного двигателя, рассмотрим его работу при изменении нагрузочного момента Мвн и постоянном токе возбуждения; при этом для простоты будем пользоваться векторной диаграммой неявнополюсной машины. Допустим, что двигатель работает при cos φ = 1, чему на векторной диаграмме (рис. 6.46, а) соответствуют ток Iа1 и угол θ1. С повышением нагрузки увеличивается угол между векторамиÉ0 и - Úc до какого-то значения θ2 , так как согласно (6.35) вращающий моментМ = Мвнпропорционаленsin θ. При этом конец вектора É0 перемещается по окружности с радиусом, равным Е0, и при принятых условиях (Iв = const; E0 = const; Uc = const ) вектор тока Ía2 также поворачивается вокруг точки О, располагаясь перпендикулярно вектору - jÍa2Xсн . Из диаграммы видно, что в рассматриваемом случае ток двигателя Ía2имеет отстающую реактивную составляющую. Если нагрузка двигателя уменьшается по сравнению с исходной, то угол θ уменьшается до значения θ3. При этом ток двигателяÍa3 имеет опережающую реактивную составляющую.
40 регулирование коэффициента мощности СД. Векторные деаграммы. U- образная характеристика для преобразования переменного тока в постоянный находят применение моторгенераторные установки, в которых двигателем служит синхронная машина. Íàгрузка таких двигателей может колебаться в широких пределах, а в некоторых случаях может быть резко ударной, если, например, преобразовательная установка питает двигатели прокатных станов. Если приводной двигатель реверсивный, то нагрузка синхронной машины может менять знак. Знак нагрузки у- синхронной машины может меняться и в том случае, если преобразовательная установка обслуживает регулируемые нереверсивные двигатели. Здесь при переходе от высоких скоростей к низшим освобождающаяся энергия инерционных масс привода может перевести генераторы постоянного тока в режим двигателя, а синхронную машину — в режим генератора. При переменной нагрузке и постоянном возбуждении косинус фи двигателя будет меняться, а вместе с тем и напряжение на вводных шинах. Применение быстродействующих регуляторов, работающих в зависимости от параметров сети, мало надежно при нагрузке, меняющей знак и величину. Такие регуляторы требуют наличия квалифицированного персонала. Фирма Метрополитен-Виккерс снабжает полюса возбудителя синхронного двигателя сериесными обмотками. Эти обмотки питаются током, ответвленным от главной цепи генераторов постоянного тока (приключаются, например, параллельно компенсационной обмотке), т. е. пропорциональным нагрузке. При перемене знака нагрузки синхронной машины сериесные обмотки ухудшают положение, так как, в связи с изменением направления тока, происходит недовозбуждение синхронной машины. Такой случай имеет место, например, у синхронного двигателя аггрегата Леонарда на Кузнецкстрое. Предлагаемый ниже способ дает регулироку косинуса фи при любых изменениях нагрузки (фиг. 1) и заключается в следующем. В цепь возбуждения возбудителя включаются два генератора 5, 6 постоянного тока с обмотками 7, 8 независимого возбуждения, э.д.с. которых направлены навстречу приложенному напряжению. Они снабжены также сериесными обмотками 9, 10, соединенными последовательно и намотанными так, что при данном направлении тока в них, одна из них является компаундной, а другая — противокомпаундной. Сила тока возбуждения возбудителя равна 41 Сравнительная оценка конструкции, свойства и характеристика асинхронных и синхронных двигателей. Характеристики асинхронных двигателей. Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие. Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения. Работа синхронного двигателя характеризуется рабочими характеристиками (рис. 42), которые представляют собой зависимость частоты вращения ротора n2 , потребляемой мощности P1 , полезного момента M2 , коэффициента мощности cos φ, КПД η и тока в обмотке статора I1 от полезной мощности двигателя P2 при f = const (рис. 33). Частота вращения ротора n2 всегда равна синхронной частоте n2, поэтому график n2 = f(P2) имеет вид прямой параллельной оси абсцисс. Потребляемая мощность P1 = P2 + ∑P, где ∑P - мощность потерь, поэтому с увеличением потерь она растёт быстрее полезной мощности P2 и график P1 = f(P2) имеет несколько криволинейный вид. Т. к. полезный момент M2 = P2/2πf, а рабочие характеристики снимаются при условии f = const, то график M2 = f(P2) имеет вид прямой, выходящей из начала координат. Вид графика cos φ = f(P2) зависит от вида настройки тока возбуждения. Обычно синхронные двигатели рассчитывают на работу при номинальной нагрузке с опережающим током и cos φ ≈ 0,8, что приводит к повышению номинальной мощности сети. Вид графика η = f(P2) имеет характер, общий для всех электрических машин. График I1 = f(P2) показывает, что с увеличением нагрузки навалу двигателя ток I1 растёт быстрее, чем потребляемая мощность P1.
Режимы работы элетродвигателей в электроприводах. Нагрузочные диаграммы. Перегрев и охлаждение ЭД. Расчет эквивалетной мощности двигателя по нагрузочной диаграмме. Электродвигатели должны соответствовать режиму работы приводимого механизма. Режимы работы судовых механизмов чрезвычайно разнообразны, поэтому характер тепловых процессов, протекающих в обмотках ЭД, неодинаков для различных приводов. В соответствии с условиями нагрева ЭД различают 3 основных режима работы ЭП: 1. продолжительный, 2. кратковременный 3. повторно-кратковременный. Продолжительным называют режим, длительность которого настолько велика, что температура нагрева при работе успевает достигнуть установившегося значения, а за время последующей паузы ЭД охлаждается до температуры окружающей среды. В этом режиме работают ЭП судовых насосов, вентиляторов, а также гребные ЭД. Кратковременным называют циклический режим, продолжительность рабочих периодов которого настолько мала, что температура нагрева ЭД не успевает за время работы достичь установившегося значения, а продолжительность паузы между двумя периодами настолько велика, что температура нагрева успевает снизиться до температуры окружающей среды. В таком режиме на судах работают ЭП якорно-швартовных устройств. Если ЭД, рассчитанный заводом-изготовителем для продолжительного режима работы, использовать полностью в кратковременном режиме, то он будет перегружен по механическим свойствам. Другими словами, недостаточная механическая перегрузочная способность двигателей, рассчитанных для продолжительного режима работы, не позволяет полностью использовать их в кратковременных режимах. В связи с этим промышленность выпускает ЭД, специально рассчитанные для кратковременных режимов работы. В каталогах эти двигатели приводятся для стандартных длительностей работы -10, 30 и 60 мин. Повторно-кратковременный режим характеризуется тем, что за время работы ЭД не успеет нагреться до установившейся температуры, а за время паузы не успеет охладиться до температуры окружающей среды. Суммарная продолжительность рабочего периода и паузы т.е. время цикла не должна превышать 10 мин. |
|
poisk-ru.ru
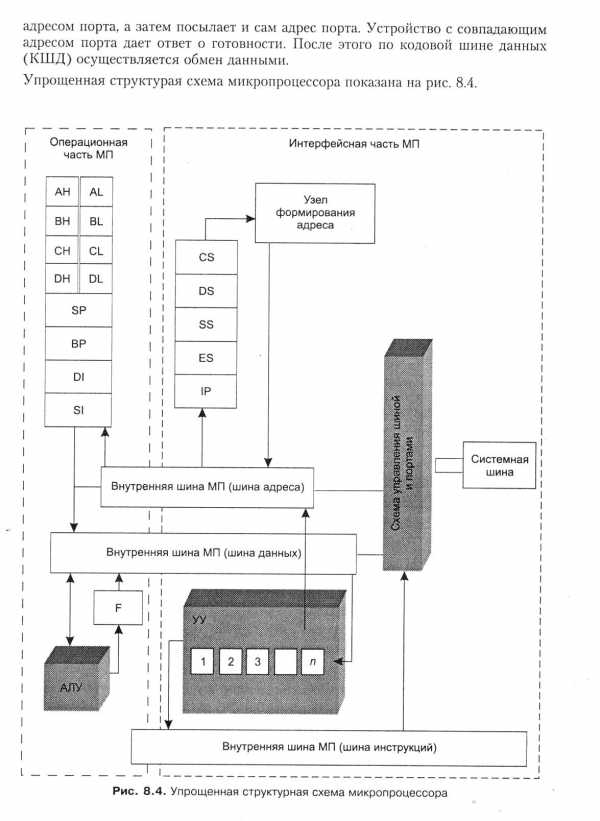
ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА. СИНХРОННЫЕ МАШИНЫ
Машины переменного тока по устройству немного отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока у машин переменного тока на статоре укладывают обмотку якоря, а на роторе — обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения. Машины переменного тока бывают синхронные и асинхронные.
Си н х р о н н ы м и называются такие машины переменного тока, частота вращения которых определяется частотой тока. С изменением частоты тока у таких машин одновременно (синхронно) меняется частота вращения. Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т. е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
Так как на судах морского флота цепи переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток-фаз, сдвинутых относительно друг друга на 120°С (1/3 периода) с таким расчетом, чтобы индуктируемая э. д. с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э. д. с. соседней фазы. Обмотку возбуждения укладывают на роторе, и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный па одном валу с синхронным генератором, или даже аккумуляторная батарея.
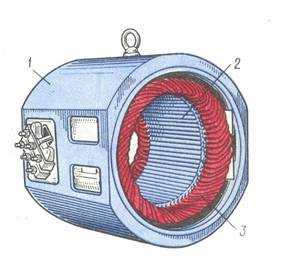
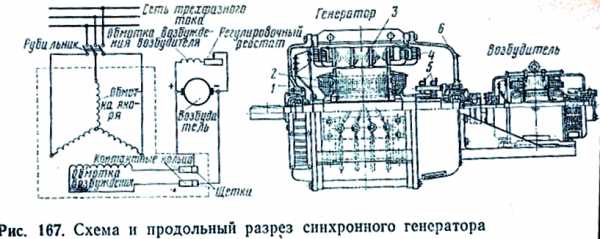
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного переменного тока с возбудителем.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного .переменного тока с возбудителем.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемой постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магиитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
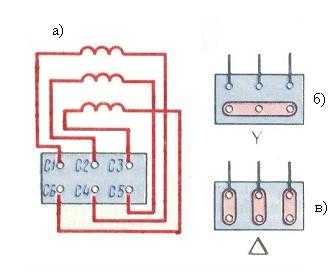
На рис. 168, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в — соединение обмотки статора в треугольник и в звезду.
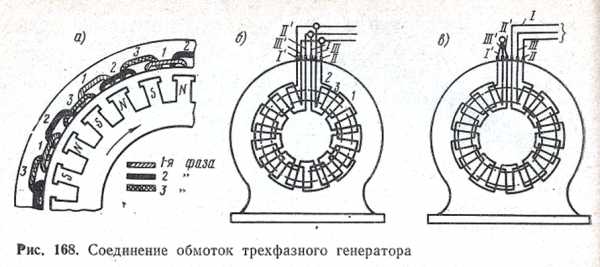
При соединении в треугольник начало первой фазы I соединяется с концом II, начало II — с концом III и, наконец, начало III — с концом I.При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными, и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности.
В настоящее время на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. Схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на выводах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор заставить работать в режиме двигателя, нужно отключить первичный двигатель и к обмоткам фаз статора подвести трехфазный ток из цепи. В этом случае генератор станет синхронным электродвигателем, потребляющим ток. Проходя по обмоткам фаз, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же частотой, как и вращающееся магнитное поле, при этом он не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Регулирование частоты вращения ротора синхронного двигателя производится изменением частоты тока цепи, а изменение направления вращения ротора — переключением двух любых фаз, Т. е. взаимным пересоединением двух питающих проводов. К недостаткам синхронных двигателей относится то, что при пуске их приходится разворачивать посторонним механизмом до частоты вращения, обеспечивающей вращающееся магнитное поле статора.
Для устранения этого недостатка применяют асинхронный пуск синхронных электродвигателей, который заключается в том, что при пуске через специальные обмотки ротора перепускают переменный ток от цепи.
ТРАНСФОРМАТОРЫ
Трансформатором называется электромагнитный аппарат, предназначенный для повышения или понижения напряжения переменного тока. Действие трансформатора основано на явлении электромагнитной индукции.
Трансформатор состоит из замкнутого стального сердечника 1 (рис. 169), собранного из пластин специальной трансформаторной стали. На сердечник надеваются .катушки 2 и 3 (обмотки) с различным числом витков изолированной проволоки. Одна обмотка, называемая первичной 2, присоединяется к источнику переменного тока. В ней создается переменное магнитное поле, намагничивающее сердечник. В другой обмотке — вторичной 3 (вторичных обмоток может быть и несколько) вследствие электромагнитной индукции возникает переменный ток.
Напряжение на концах вторичной обмотки зависит от числа витков в этой обмотке. Если число витков вторичной обмотки равно числу витков первичной обмотки, то напряжение тока во вторичной обмотке будет таким же, как и в первичной обмотке. Если число витков вторичной обмотки будет меньше числа витков первичной обмотки, например, «в два раза, то и напряжение, даваемое вторичной обмоткой, будет в два раза меньше, чем в первичной обмотке.
Трансформатор, дающий напряжение меньше, чем в цепи первичной обмотки, называется понижающим, а трансформатор, дающий напряжение больше, чем в цепи первичной обмотки, называется повышающим.
Если вторичная обмотка разомкнута с цепью, а к зажимам первичной обмотки подается питание, то такой режим работы трансформатора называется х о л о с т ы м ходом. Если не считать потерь на нагревание проводников обмоток и сердечника трансформатора, то при трансформации первичный и вторичный токи приблизительно обратно пропорциональны числам витков соответствующих обмоток, а э. д. с. первичной и вторичной обмоток прямо пропорциональны числам витков соответствующих обмоток. Мощность первичного тока в трансформаторах приблизительно равна мощности вторичного тока, а силы токов в обмотках трансформатора обратно пропорциональны напряжениям на этих обмотках.

Чтобы трансформировать трехфазный ток, применяют трехфазные трансформаторы с тремя первичными и тремя вторичными обмотками (трехстержневые) или групповые, которые составляются из трех однофазных (в каждую фазу включают по трансформатору). Первичные и вторичные обмотки могут соединяться между собой звездой или треугольником. Процессы, происходящие в каждой фазе трехфазного трансформатора в принципе не отличаются от таковых в однофазных трансформаторах.
Кроме трехфазных, применяются (в основном для установок низкого напряжения) так называемые автотрансформаторы, у которых имеется только одна обмотка, часть которой является общей для первичной и вторичной цепи.
На судах применяются специальные типы судовых трансформаторов для установки на открытых палубах и в закрытых помещениях. Все судовые трансформаторы выпускаются в закрытых кожухах, снабженных лапами для крепления.
Трансформатор перед включением в цепь необходимо осмотреть и убедиться в отсутствии посторонних предметов, грязи, воды и масел на нем и вблизи вентиляционных отверстий.
Похожие статьи:
poznayka.org
Синхронные машины переменного тока.
22.Образование вращающегося магнитного поля при двухфазной и трёхфазной системе.
Магнитное поле двухфазной и трехфазной обмотки.
Рассмотрим вращающееся магнитное поле трехфазной обмотки машины переменного тока.
На статоре расположены три катушки, оси которых сдвинуты взаимно на углы 120°. Каждая катушка для наглядности изображена состоящей из одного витка, находящегося в двух пазах (впадинах) статора.
В действительности катушки имеют большое число витков. Буквами А, В, С обозначены начала катушек, X Y, Z - концы их. Катушки соединены звездой, т. е. концы X, Y, Z соединяются между собой, образуя общую нейтраль, а начала А, В, С подключаются к трехфазной сети переменного тока. Катушки могут соединяться и треугольником.
По катушкам протекают синусоидальные токи с одинаковым амплитудами Im и частотой щ = 2рf, фазы которых смещены на 1/3 периода.
Токи, протекающие в катушках, возбуждают переменные магнитные поля, магнитные линии которых будут пронизывать катушки в направлении, перпендикулярном их плоскостям. Следовательно, средняя магнитная линия или ось магнитного поля, создаваемого катушкой А - X, будет направлена под углом 90° к плоскости этой катушки.
Направления магнитных полей всех трех катушек показаны векторами ВА, ВВ и ВС, сдвинутыми один относительное другого также на 120°.
Условимся считать положительными направления токов в катушках от начала к концу обмотки каждой фазы.
При этом в проводниках статора, подключенных к начальным точкам А, В, С, токи, принятые положительными, будут направлены на зрителя, а в проводниках, подключенных к конечными точкам X, Y и Z,- от зрителя.
Положительным направлениям токов будут соответствовать положительные направления магнитных полей, показанные на том же рисунке и определяемые по правилу буравчика.
Не касаясь количественной стороны явления, определим сначала направления магнитного поля, созданного трехфазной обмоткой для различных моментов времени.
В момент t= 0 ток в катушке А - X равен нулю, в катушке В - Y отрицателен, в катушке С -Z положителен. Следовательно, в этот момент тока в проводниках А и X нет, в проводниках С и Z он имеет положительное направление, а в проводниках B и Y - отрицательное направление.
Назначение машин переменного тока.
Синхронные машины – это бесколлекторные машины переменного тока, имеющие синхронную частоту вращения ротора, т. е. у них частота вращения ротора равна частоте вращения магнитного поля статора. В промышленности и на железнодорожном транспорте синхронные машины используют в основном как генераторы; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на тепловозах, автомобилях, самолётах. В первом случае мощностью до 1200 МВт, во втором – до 4400 кВт. В зависимости от типа привода различают турбогенераторы, гидрогенераторы и дизель-генераторы. Синхронные машины также используются и в качестве электродвигателей при мощности 100 кВт и выше для приводов насосов, компрессоров, вентиляторов и других механизмов.
Работа синхронной машины основана на явлении электромагнитной индукции и заключается в преобразовании механической энергии в электрическую энергию переменного тока (генераторы) или электрической энергии переменного тока в механическую (двигатели), т. е. синхронная машина обладает обратимостью.
Синхронная машина состоит из неподвижной части – статора, в пазах которого расположена многофазная (как правило, трёхфазная) обмотка и вращающейся части – ротора с обмоткой возбуждения, питаемой от источника постоянного тока (возбудителя) через контактные кольца и щётки. Синхронная машина может работать автономно в качестве генератора, питающего подключенную к ней нагрузку, или параллельно с сетью, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т. е. работать генератором или двигателем. При подключении обмотки статора к сети с напряжением U1 и частотой f1 проходящий по обмотке ток создаёт вращающееся магнитное поле, частота вращения которого
n1 = 60×f1/p.
В результате взаимодействия этого поля с током возбуждения Iв, проходящим по обмотке ротора, создаётся электромагнитный момент М, который при работе машины в двигательном режиме является вращающим, а при работе в генераторном режиме – тормозным. В установившемся режиме ротор неподвижен относительно магнитного поля и вращается с частотой вращения n1 = n2, где n2 - частота вращения ротора. Таким образом, в установившемся режиме ротор машины постоянного тока вращается с постоянной частотой, равной частоте вращающегося магнитного поля.
1 — сердечник статора, собранный из листовой электротехнической стали, 2 — трехфазная обмотка статора, включаемая в сеть переменного тока, 3 — сердечник ротора, 4 — фазная обмотка ротора, 5 — контактные кольца для соединения с пусковым или регулировочным реостатом, 6 — короткозамкнутая обмотка ротора.
studfiles.net
Электрические машины переменного тока — Мегаобучалка
Машины переменного тока подразделяются на синхронные и асинхронные. Группа асинхронных машин представлена на практике главным образом трехфазными асинхронными двигателями, самыми распространенными из всех типов двигателей. В силу обратимости трехфазная асинхронная машина может работать и в режиме генератора, что имеет место в тормозных режимах. Однако, использование асинхронных машин в качестве генераторов в связи с осложнениями, возникающими при их работе в этом режиме и несомненными преимуществами синхронных генераторов, не применяется. Однофазные асинхронные двигатели получили свое распространение только в виде двигателей малой мощности. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели получили преимущественно применение в качестве привода мощных производственных машин.
Асинхронная машина - такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотой , поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростью n2 отличающееся от скорости вращения магнитного поля n1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки.
Неподвижная часть машины - статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 1200 одна относительно другой, подключенные к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль образующих внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены стороны трех катушек обмотки. В полости статора расположен ротор, представляющий собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
При вращении магнитного поля токов статора со скоростью n1, в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора возникнут токи, взаимодействующие с вращающимся магнитным полем. Это взаимодействие проявится в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозные усилия на его валу, то он получит ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратиться, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью и в его короткозамкнутых контурах установятся токи, обеспечивающие создание вращающего момента, равного тормозному. Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:
где - частота вращения ротора;
- частота вращения магнитного поля;
- число пар полюсов двигателя.
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2-6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются. Однако увеличивается ток в роторе и потери электрической энергии.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора - как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:
где - ЭДС обмотки статора,
- ЭДС обмотки неподвижного ротора,
и - соответственно обмоточные коэффициенты обмоток статора и ротора,
и - число обмоток статора и ротора,
- основной магнитный поток,
- частота тока цепи,
- частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению.
При неподвижном роторе , т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
ЭДС во вращающемся роторе .
Индуктивное сопротивление вращающегося ротора:
.
Активное сопротивление ротора не зависит от частоты.
По закону Ома ток в роторе равен:
.
Электрическая мощность, подведенная к двигателю из сети , преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины - и на потери в меди статора, т.е. на нагрев обмотки статора .Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью . Часть мощности. Переданной на ротор, тратится на нагрев меди обмоток ротора и зависит от скольжения . Остальная часть мощности называется полной механической мощностью . Если из полной механической мощности вычесть механические потери и добавочные потери то получится полезная мощность на валу двигателя .
КПД асинхронного двигателя:
, где .
Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше.
Механическая мощность ротора:
,
где - вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
.
Основные режимы работы асинхронного двигателя это
1) пуск двигателя в ход,
2) холостой ход двигателя,
3) рабочий режим двигателя, в частности режим при полной номинальной нагрузке.
Рабочий режим двигателя при номинальной нагрузке характеризуется номинальными параметрами различными для каждого асинхронного двигателя. Основным номинальным параметром асинхронного двигателя является его номинальная мощность . Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
Вторым параметром двигателя является его номинальная скорость вращения .
Важным электрическим параметром является напряжение, для которого предназначен двигатель . Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя.
Номинальный момент часто вычисляют по упрощенной формуле, положив в нее номинальные значения величин:
(кГм) или (Нм)
Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула:
где - максимальный вращающий момент,
- критическое скольжение, при котором вращающий момент достигает своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле
.
Зависимость вращающего момента от его скольжения или, от скорости вращения ротора называют механической характеристикой двигателя. , при , .
Для оценки рабочих свойств двигателя пользуются его рабочими характеристиками. Рабочими характеристиками асинхронного двигателя называют кривые, характеризующие зависимость электромагнитного момента , тока статора , КПД , и коэффициента мощности на валу от полезной мощности на валу при неизменном напряжении и частоты питающего напряжения , .
В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа: двигатели с короткозамкнутым ротором и двигатели с фазным ротором или, как их иначе называют, двигатели с кольцами.
При пуске двигателя с короткозамкнутым ротором скорость вращения ротора в первый момент , чему соответствует максимальное скольжение , двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4-10 раз больше номинального. Пусковой момент составляет 0,9 - 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск - включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в раз, где - коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети: .
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей характеризуются коэффициентами кратности пускового тока и пускового момента .
Для частоты вращения двигателя используются:
1) изменение частоты вращения магнитного поля (частоты питающего напряжения),
2) переключение пар полюсов,
3) изменение активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе частота вращения двигателя равна частоте вращения магнитного поля: .
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:
где - угол между векторами ЭДС и напряжения, т.е. ,
- полное индуктивное сопротивление двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем - в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Принципиально конструкция синхронной машины такая же, как у машин переменного тока. Синхронная машина так же состоит из двух частей: неподвижной части - статора и вращающейся части - ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения - на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения переменного тока, при этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Поэтому для присоединения синхронной машины к сети необходимо не только придать вращению ротора нужную скорость, но и убедиться в том, что ход изменения напряжений на машине и в сети одинаков.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Синхронные двигатели и синхронные генераторы устроены совершенно одинаково. Во всяком синхронном двигателе, приведенном во вращение, начинает наводиться ЭДС, если только в его обмотке возбуждения протекает ток.
Для того чтобы увеличивать или уменьшать напряжение синхронного генератора, нужно изменять величину постоянного тока, при этом будет изменяться величина магнитного потока, чем больше будет изменяющийся магнитный поток, тем больше будет и напряжение, наводимое в машине (разумеется, при постоянстве других условий).
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.
ПРИМЕРЫ
Пример 1. Определить мощность, подводимую к трехфазному асинхронному двигателю с фазным ротором, а также ток в обмотках статора при их соединении звездой и треугольником. Номинальные параметры двигателя: полезная мощность на валу кВт, напряжение на статоре В, , .
Решение. Активная мощность, потребляемая двигателем, равна кВт, полная мощность .
При соединении обмоток звездой А, при соединении треугольником А.
Пример2. Для привода насоса использован трехфазный асинхронный электродвигатель с короткозамкнутым ротором (рис. 19) с числом пар полюсов и частотой вращения ротора , приведенным в таблице 1; двигатель питается от трехфазной сети с частотой напряжения Гц. Определить частоту вращения и вращающегося магнитного поля, скольжение ротора, частоту тока в роторе при пуске и в рабочем режиме , а также частоту вращения ротора , частоту тока в роторе при возрастании нагрузки на валу двигателя, с учетом того, что частота вращения ротора при этом уменьшилась на 5% и составляет .

Решение. Частота вращения магнитного поля (синхронная частота вращения) при числе пар полюсов (см. строку 1 табл.1): об/мин.
Угловая частота вращения магнитного поля:
рад/с.
Скольжение ротора двигателя:
.
Частота вращения ротора двигателя:
об/мин, .
Частота тока в роторе двигателя при пуске
( , ): Гц.
Частота тока ротора при частоте вращения двигателя
Гц.
Частота вращения ротора при возросшей нагрузке на валу двигателя:
об/мин.
Скольжение ротора при возросшей нагрузке:
.
Частота тока ротора при возросшей нагрузке:
Гц.
Пример 3. Для пуска восьмиполюсного асинхронного двигателя с фазным ротором и номинальными параметрами: об/мин; и Ом используется пусковой реостат. Определить сопротивление фазы пускового реостата, чтобы при пуске двигатель развивал максимальный момент, если частота напряжения сети Гц.
Решение. Номинальное скольжение определяется по формулам
,
согласно которым Об/мин
и .
Критическое скольжение равно
.
Пусковое сопротивление определяется из соотношения
,
отсюда Ом.
Пример 4. Асинхронный двигатель с короткозамкнутым ротором имеет следующие паспортные данные: В, кВт, об/мин, %, . Кратность пускового тока , частота напряжения питания Гц. Определить число пар полюсов, номинальный и пусковой токи двигателя при соединении обмоток статора в треугольник и звезду.
Решение. Ближайшая стандартная синхронная частота об/мин, следовательно, число пар полюсов , т.е. машина шестиполюсная.
Скольжение равно , мощность, потребления двигателя кВт, номинальный момент Нм.
При соединении обмоток треугольником номинальный ток
А,
пусковой ток А.
При соединении обмоток звездой А, пусковой ток А, т.е. пусковой ток в этом случае в раз меньше.
Пример 5. Синхронный шестиполюсный двигатель имеет следующие номинальные данные: кВт, об/мин, В, А, Ом. Определить номинальный и максимальный моменты двигателя, если ЭДС двигателя равна 670 В. Построить угловую характеристику двигателя.
Решение. Номинальный момент определяется по формуле
.
Максимальный момент при равен:
.
Подставляя исходные данные, получаем
.
Исходная зависимость для угловой характеристики имеет вид . Например, при номинальном моменте и .
Электропривод
В современном автоматизированном производстве технологические процессы совершаются электромеханическими системами, состоящими из трех существенно различных частей: машины-двигателя, передаточного механизма и рабочей машины.
Первые две части: двигатель с системой управления и передаточный механизм (шкивы, муфты, редукторы) служат для передачи мощности и движения рабочей машине и объединяются под общим названием – привод.
Если в качестве двигателя используется электродвигатель, то привод называется электроприводом.
Кроме основных частей электропривода электродвигателя и передаточного механизма большая роль в его работе принадлежит аппаратуре управления (реле, контакторы) и преобразовательным устройствам (ионные преобразователи, преобразователи частоты).
Существует три основных типа электропривода:
1) Групповой (трансмиссионный), когда группа исполнительных механизмов приводится от одной или нескольких трансмиссий, которые вращает один двигатель. Этот тип электропривода неэкономичен и сегодня применяется редко.
2) В одиночном электроприводе один электродвигатель приводит в движение отдельную машину ил исполнительный механизм, например металлорежущий станок. Отдельные механизмы этого станка приводятся от этого же двигателя через систему механических передач.
3) Многодвигательный электропривод характеризуется тем, что каждый отдельный механизм рабочей машины приводится своим электродвигателем.
megaobuchalka.ru








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






