
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).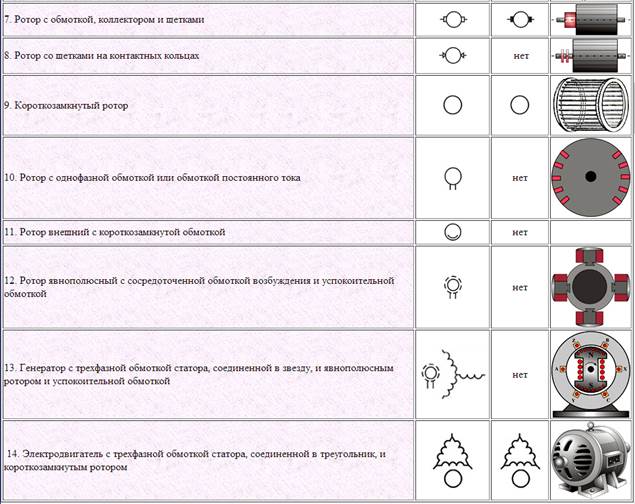
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В).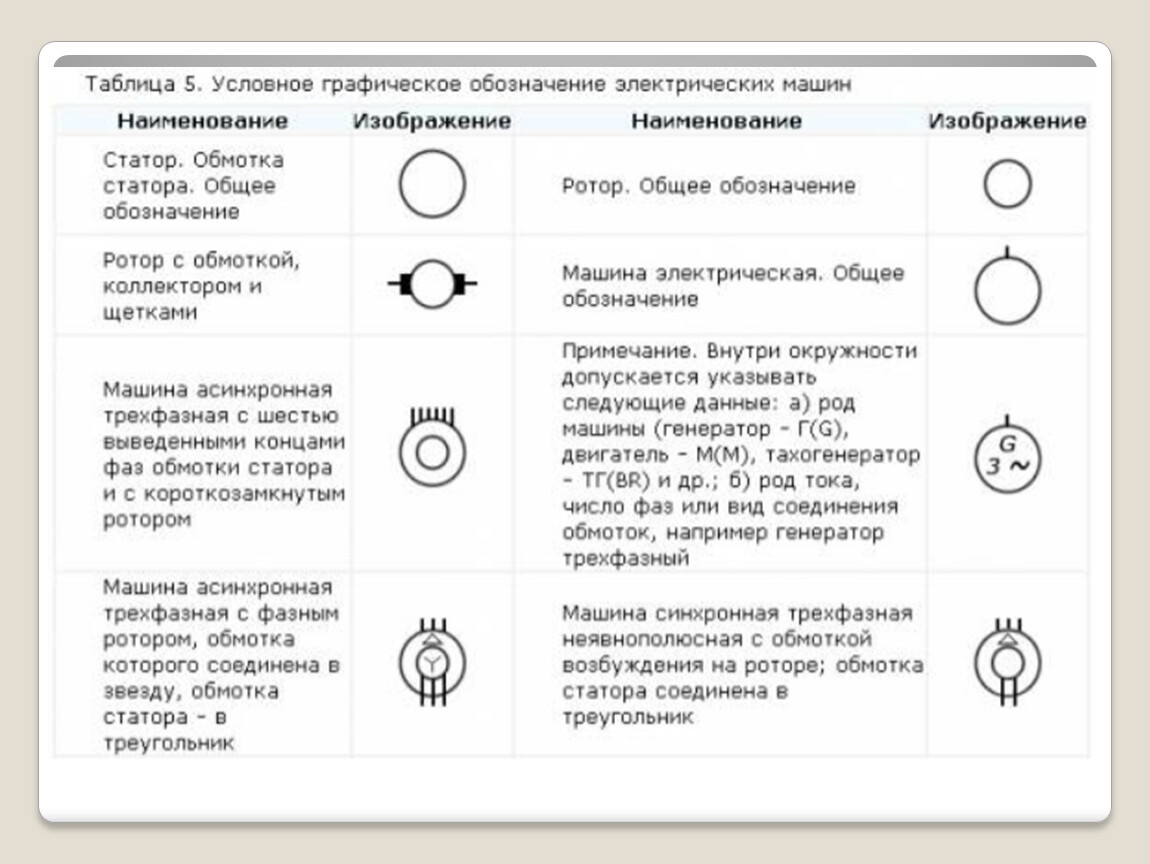 Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Условное обозначение двигателя — Энциклопедия по машиностроению XXL
Условные обозначения двигателей указы-
[c.767]
УСЛОВНОЕ ОБОЗНАЧЕНИЕ ДВИГАТЕЛЯ
[c. 802]
802]
В условном обозначении двигателя после всех индексов, относящихся к модификации, вводят буквы и цифры, характеризующие вид климатического исполнения машины (табл. 11.1.9) и категорию размещения (табл. И.1.10) — см. ГОСТ 15150—69. [c.239]
Условное обозначение двигателей Вн о Ч 2 п) 10 в Еге го о о в 1ш г ш Ь ь п ь ь в [c.271]
Условное обозначение двигателей Л н 1 4 г 3 ю 1 — 0 о О О Чн н Чк 1ш Чш к Гш Ь Ь л а ь о [c.272]
Условные обозначения двигателей указывают в технических условиях на конкретные типы двигателей. [c.860]
Условное обозначение двигателя Моменг, Н м Макси- мальная частота вращения, мин-1 Моменг инерции J-10-3, кг-м Длина, мм Диаметр корпуса, мм Диаметр ранцевых отверстий, мм Масса, КТ
[c.245]
Условное обозначение двигателя [c.248]
Выполняется расчет кинематических и основных геометрических параметров механизма (передаточных отношений, угловых скоростей, диаметров колес, размеров шкал, габаритов корпуса и т. д.) с учетом параметров, конструкции, размеров, мест расположения и способов присоединения комплектуемых (готовых покупных) изделий, связанных с механизмом (см. 2.9). Вычерчиваются лучшие варианты кинематических схем, на которых в условных обозначениях изображаются все звенья и кинематические пары механизма и указываются их взаимное расположение и связи с другими узлами прибора. Каждая кинематическая схема снабжается необходимыми сведениями, характеризующими механизм. На схеме указывается тип двигателя и частота вращения его вала, цена оборота и цена деления шкалы, передаточные отношения, числа зубьев и модули колес, степень их точности, вид сопряжения и другие данные (см. рис. 28.7).
[c.402]
д.) с учетом параметров, конструкции, размеров, мест расположения и способов присоединения комплектуемых (готовых покупных) изделий, связанных с механизмом (см. 2.9). Вычерчиваются лучшие варианты кинематических схем, на которых в условных обозначениях изображаются все звенья и кинематические пары механизма и указываются их взаимное расположение и связи с другими узлами прибора. Каждая кинематическая схема снабжается необходимыми сведениями, характеризующими механизм. На схеме указывается тип двигателя и частота вращения его вала, цена оборота и цена деления шкалы, передаточные отношения, числа зубьев и модули колес, степень их точности, вид сопряжения и другие данные (см. рис. 28.7).
[c.402]
Здесь штрихом обозначена производная момента инерции по углу поворота двигателя остальные условные обозначения пояснены в п. 14. [c.178]
На фиг. 23, б построена кинематическая схема механизма двигателя (фиг. 23, а) в условных обозначениях, указанных на стр. 3 и 4. Все
[c.5]
3 и 4. Все
[c.5]
Условные обозначения в схемах. При составлении и чтении схем можно руководствоваться наиболее употребительными условными обозначениями, приведёнными в табл. 6, а также следует учитывать положение, применительно к которому принято давать изображение схемы 1) напряжение на токоприёмнике отсутствует, питание управления выключено 2) силовые контроллеры непосредственных систем и контроллеры управления косвенных систем — в нулевой позиции 3) кнопки — в выключенном положении 4) соответственно все аппараты — в положении, которое они принимают при обесточенных катушках 5) аппараты, не занимающие определённого положения, при обесточенной цепи изображаются групповые контроллеры — в положении, соответствующем началу пуска, тормозной переключатель — в положении моторного режима, реверсор — в положении вперёд для условного первого поста управления 6) от-ключатели двигателей и разъединители силовой сети — во включённом положении. [c.481]
B. Мнемонический номер — условное обозначение или классификация конкретного документа, содержащее символы или буквы, связанные с его темой (например, ВРД — воздушно-реактивный двигатель).
[c.77]
Мнемонический номер — условное обозначение или классификация конкретного документа, содержащее символы или буквы, связанные с его темой (например, ВРД — воздушно-реактивный двигатель).
[c.77]
С представления структуры машины начинается ее создание. Анализ работы машины, условий работы немыслим без знания ее структуры. Структуру любой машины представляют в виде структурной схемы. На основании структурной схемы определяют основные размеры машины, осуществляют первое компоновочное решение и набрасывают предварительную кинематическую схему. Структурные схемы машин составляют в соответствии с рекомендуемыми условными обозначениями элементов машин [42]. Нанесение и соединение (линиями или стрелками) условных обозначений для получения структурной схемы начинают от двигателя в последовательности присоединения передач, валов рабочих органов и механизмов. На структурной [c.10]
Условные обозначения на фиг. 10 Размеры в ми при различных 1 мощностях двигателей ъ л. с.
[c.434]
10 Размеры в ми при различных 1 мощностях двигателей ъ л. с.
[c.434]
Условное обозначение типа асинхронного двигателя состоит из буквенно-цифровых символов, расположенных в следующем порядке [c.802]
Такая система может показаться несколько усложненной, однако простая система оказалась недостаточной для охвата всего разнообразия форм двигателей. В будущем могут быть подобраны подходящие условные обозначения, с помощью которых станет возможным создать методику стенографической классификации. Предлагаемая в настоящей книге классификационная схема в полном объеме представлена на рис. 1.150. [c.215]
Примечание. Условные обозначения Гщ — постоянная времени силового шагового привода и — коэффициент передачи и постоянная времени электрического усилителя мощности и.Т — коэффициент передачи и постоянная времени электрогидравлического усилителя мощности — номинальная частота вращения вала роторного двигателя д.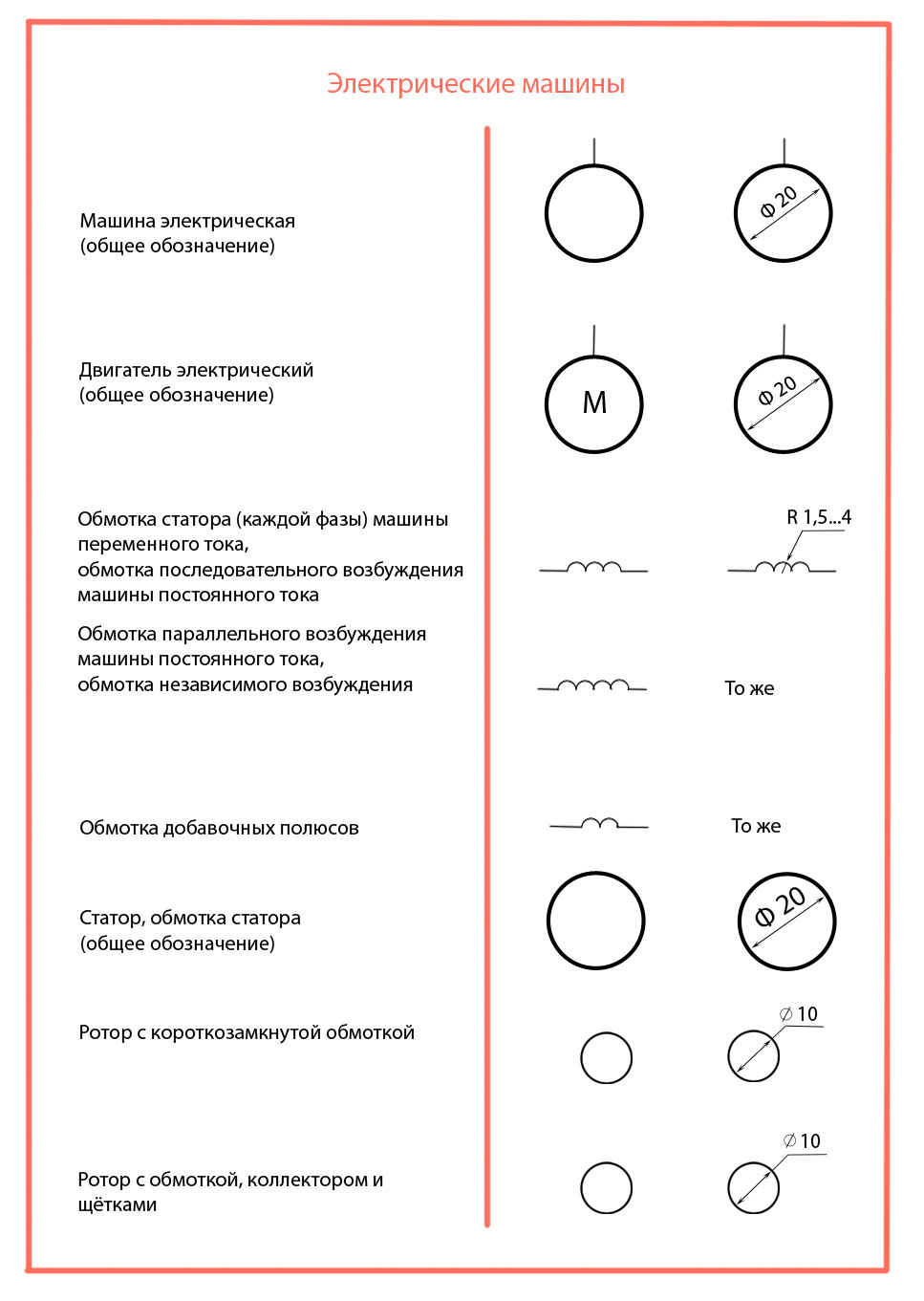 7 , — номинальные напряжение, ток и сопротивление якорной обмотки двигателя постоянного тока — приведенный момент инерции ротора двигателя m — масса рабочего органа станка fp — передаточное отношение редуктора F — площадь поршня силового цилиндра — подача насоса С — коэффициент утечек гидромотора f — коэффициент трения поршня силового цилиндра — коэффициент сжимаемости масла.
[c.128]
7 , — номинальные напряжение, ток и сопротивление якорной обмотки двигателя постоянного тока — приведенный момент инерции ротора двигателя m — масса рабочего органа станка fp — передаточное отношение редуктора F — площадь поршня силового цилиндра — подача насоса С — коэффициент утечек гидромотора f — коэффициент трения поршня силового цилиндра — коэффициент сжимаемости масла.
[c.128]
В условное обозначение лебедок входят буква Л (лебедка) и цифры — межцентровое расстояние (Л-450, Л-500, Л-600). Одна и та же лебедка (например, Л-450, Л-600) может использоваться в качестве грузовой и стреловой. Все лебедки (до Л-600 включительно) имеют единую принципиальную схему, по которой двигатель, редуктор и барабан выполнены в виде единого блока. Электродвигатель прикреплен к корпусу редуктора с помощью фланца, барабан жестко связан с выходным валом редуктора. При такой конструкции отпадает необходимость тщательно проверять соосность соединений, что упрощает монтаж и эксплуатацию лебедок. [c.25]
[c.25]
В соответствии с исполнением установлено следую-ш,ее обозначение двигателей А — защищенный в чугунном корпусе АО — закрытый, обдуваемый, в чугунном корпусе АЛ—закрытый, обдуваемый, в алюминиевом корпусе. Кроме буквенных имеются также цифровые индексы первая цифра указывает условный номер диаметра статора, вторая — длину статора, третья — число полюсов. Например, АОЛ-31-6 обозначает электродвигатель общего назначения в закрытом обдуваемом алюминиевом корпусе, третьего диаметра, первой длины, шестиполюсный. Специальные двигатели единой серии обозначаются следующим образом АОЭ — со встроенным электромагнитным тормозом АОП — с повышенным пусковым моментом АОС—с повышенным скольжением [c.38]
Номинальные, а также ремонтные размеры основных сопряжений кривошипно-шатунного и газораспределительного механизмов двигателей легковых автомобилей приведены в табл. 18, а их условные обозначения — на рис. 46. [c.75]
Кинематические схемы.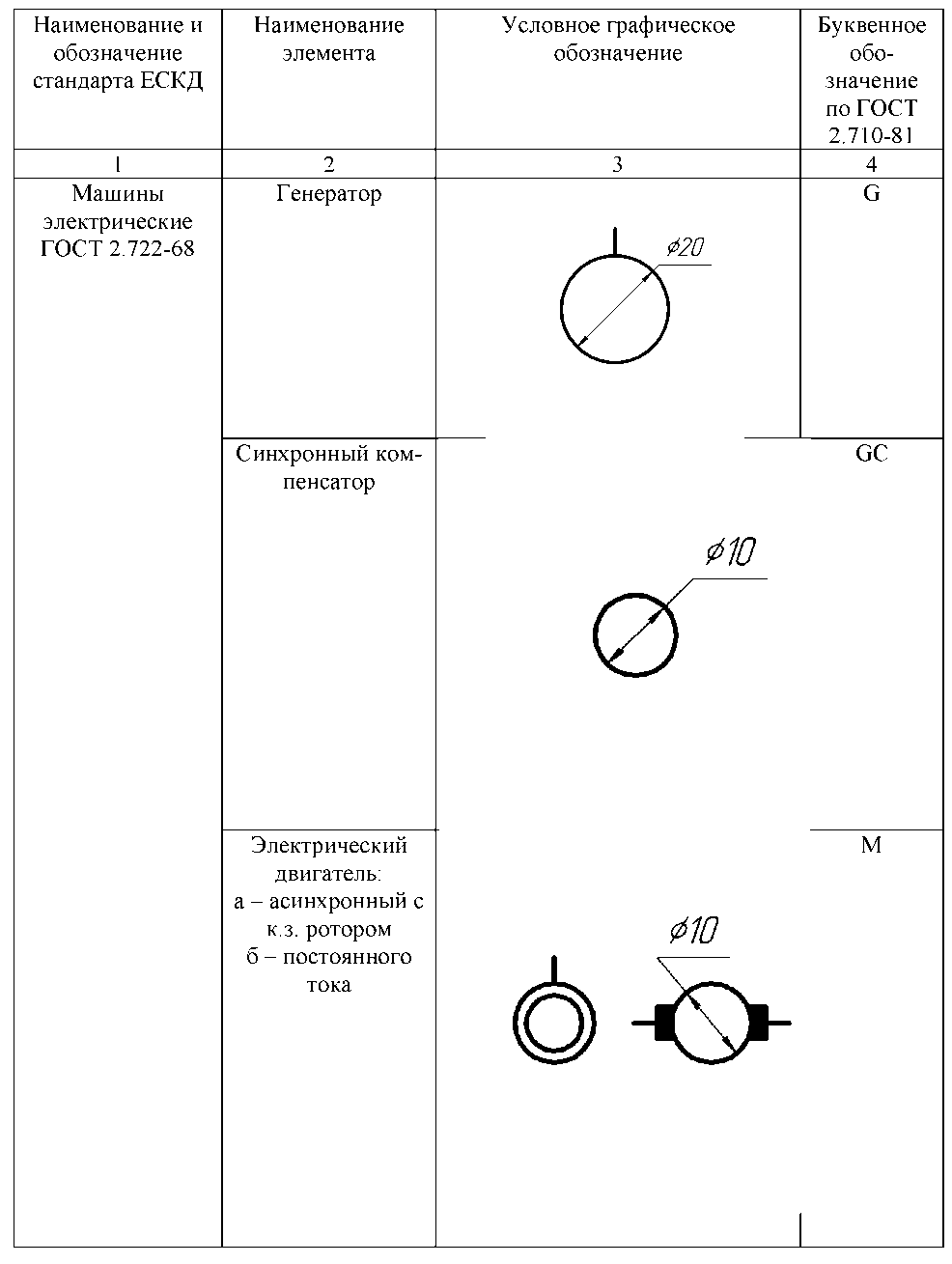 Для общего ознакомления с взаимодействием механизмов, обеспечивающих движение автогрейдера, на рис. 6 приведена его кинематическая схема. Кинематические схемы с помощью условных обозначений позволяют проследить последовательность передачи вращения коленчатого вала двигателя ведущим колесам автогрейдера.
[c.12]
Для общего ознакомления с взаимодействием механизмов, обеспечивающих движение автогрейдера, на рис. 6 приведена его кинематическая схема. Кинематические схемы с помощью условных обозначений позволяют проследить последовательность передачи вращения коленчатого вала двигателя ведущим колесам автогрейдера.
[c.12]
Механизм состоит из звеньев, входящих в кинематические пары, поэтому надо уметь изображать их на кинематических схемах их условные обозначения приведены в таблице (табл. 2. 1). Так при изображении на схеме шатуна нет необходимости вычерчивать все детали, из которых он состоит, важно отметить только положение осей враш,ательных кинематических пар и жесткую связь между ними. В качестве примера составления кинематической схемы приведен чертеж и кинематическая схема двухцилиндрового двигателя (рис. 2. I). Схема двигателя достаточно проста и составить ее нетрудно, однако во многих случаях составление схемы не [c.11]
Кинематическая схема — схема, изображенная с помощью условных обозначений, позволяющих проследить последовательность передачи вращения коленчатого вала двигателя рабочим механизмам и ведущим колесам машины. [c.410]
[c.410]
Обозначение. В сочетании бука и цифр, обозначающих модель легкового автомобиля, буквы — условное обозначение завода-изгото-вителя, первая пара цифр — условное обозначение рабочего объема двигателя, вторая пара цифр — номер модели в классе, последняя цифра — номер модификации модели. [c.177]
Условное обозначение двигателя Номи- нальная мощность кВт Частота вращения, мин Момент инерщш /10-3, КТ-м2 Высота оси, мм Исполнение Б Мас- са, [c.247]
Условное обозначение двигателя Момент, Н м Максимальн ая частота вращения, МИН 1 Моменг инерции /10-3, кт-м Длина, мм Высота мм Диаметр фланцевых ofrBep ndt, мм Масса, кг [c.248]
Условное обозначение двигателя Мо- менг -Л от, Нм Макси- мальная частота вращения, мин- Моменг инерщш ЛО З, кгм Длина, мм Высота, мм Ширина, мм Диа- метр флан- цевых отвер- стий, мм Мас- са, кг [c.250]
Цифры после букв означают высоту двигателя в дециметрах цифры после первого тире — мощность двигателя в киловаттах, после второго тире — порядковый номер модернизации.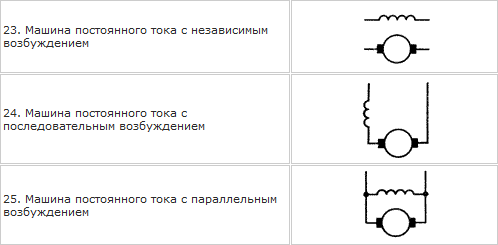 Пример условного обозначения двигателя с водяным охлаждением, высотой 5 дм, мощностью 160 кВт, 2-й модификации ЭКВ5-160-2 (ГОСТ 16565—71).
[c.227]
Пример условного обозначения двигателя с водяным охлаждением, высотой 5 дм, мощностью 160 кВт, 2-й модификации ЭКВ5-160-2 (ГОСТ 16565—71).
[c.227]
Приведенные допущения не накладывают сколько-нибудь существенных ограничений на общность полученных результатов. При необходимости влияние каждого из допущений может быть строго оценено при помощи общих методов, разработанных выше. Введем следующие условные обозначения для наиболее часто встречающейся схемы механизма с самотормозящейся червячной передачей (рис. 78) М- — вращающий шмент двигателя — момент сопротивления на валу червяка M i = к У гМ.а — момент сопротивления на валу червячного колеса, приведенный к двигателю, при установившемся холостом ходе s — жесткости участков валопровода между двигателем и червяком, червячным колесом и зажимными элементами т) , — приведенные к. п. д. в тяговом режиме и коэффициент оттормаживания самотормозящейся передачи Фх — угол поворота ротора двигателя [c.286]
На электроподвижном составе постоянного тока силовая схема в общем случае включает якори с обмотками дополнительных полюсов и обмотки возбуждения тяговых двигателей, пуско-тормозные сопротивления, токоприёмники, силовые элементы аппаратов управления и аппаратов защиты, возбудители при рекуперативном торможении, разъединители для отключения аварийных двигателей н для отключения всей силовой сети от токоприёмников. Наиболееупотребительные в принципиальных схемах условные обозначения приведены в табл. 6, а сокращения — па стр. 481.
[c.477]
Наиболееупотребительные в принципиальных схемах условные обозначения приведены в табл. 6, а сокращения — па стр. 481.
[c.477]
С учетом требований к точности по ГОСТ 520—71 установлено пять классов точности подшипников, обозначаемых (в порядке повышения) 0 6 5 4 2. Для больншнства механизмов общего назначения применяют подщипники класса точности 0. Подшипники более высоких классов точности применяют при больших частотах вращения и в случаях, когда требуется высокая точность вращения вала (например, для шпинделей шлифовальных и других прецизионных станков, для авиационных двигателей, приборов). Класс точности указывают через тире перед условным обозначением подшипника, например 6— 205 (6 — класс точности подшипника) [c.78]
Структура условного обозначения конструктивного исполнения и способа монтажа двигателей установлена ГОСТ 2479-79. Условное обозначение состоит из латинских букв [М (International Mounting, по Публикации МЭК 34-7-72) или М (для конструктивных исполнений, не оговоренных в Публикации МЭК 34-7-72, но установленных ГОСТ 2479-79) и следующих за ними четырех цифр. [c.784]
[c.784]
Примечание. Буквы и цифры, состав-ляющие марку насоса, означают Э — элсктро, М — масляный, Н — насос, 3 — условное обозначение модели насоса с двигателем постоянного тока, 3/1 и 11/1 — с двигателями переменного тока. [c.309]
По общему виду станка или машины нельзя судить о порядке передачи движения в них от двигателя или приводного вала к огдель-ным механизмам. О то.м, какие детали участвуют в передаче движения, в какой последовательности они соединены, какое число оборотов совершает каждое из них и какова скорость их перемещения, узнают из кинематической схемы станка, которая представляет собой совокупность условных обозначений механизмов и деталей, передающих движение, в их взаимосвязи. [c.59]
Для работы на морских судах и в народном хозяйстве применяются асинхронные короткозамкнутые электродвигатели с повышенным скольжением серии МАП 120—720 с тормозами серии ТМТ 12—72 и без тормозов. Двигатели мощностью от 1,2 до 85 кВт выпускаются односкоростными с синхронной частотой вращения 1000 и 1500 об/мин двухскоростными и трехскоростными — для кратковременного и повторнократковременного режимов работы двухскоростными — для кратковременного режима работы, допускающими стоянку под током короткого замыкания одно-, двух- и трехскоростными — для работы в системах частотного регулирования (табл.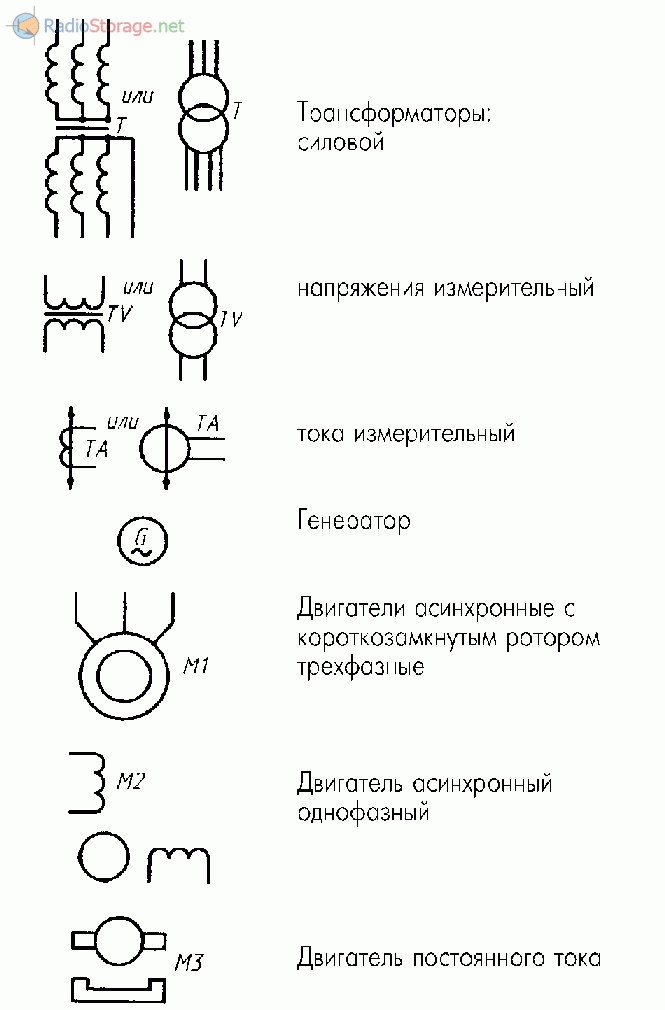 II. 1.21). Структура условного обозначения MAnXi2Xa—Х3/Х3/Х3Х4Х5 М — машина А — асинхронная П — повышенного скольжения Xi -г- условный габаритный размер по диаметру статора (1, 2, 4, 5, 6 или 7) 2 — порядковый номер серии Хг — условный габаритный размер по длине статора на одном диаметре (1 или 2) Хд — число полюсов (одно-, двух-или трехскоростной двигатель) Х4 — климатическое исполнение Xft — категория размещения. Характеристики двигателя приведены в ТУ 16—513.334—77 Электродвигатели асинхронные серии МАП 120—720 с тормозами серии ТМТ 12—72 .
[c.249]
II. 1.21). Структура условного обозначения MAnXi2Xa—Х3/Х3/Х3Х4Х5 М — машина А — асинхронная П — повышенного скольжения Xi -г- условный габаритный размер по диаметру статора (1, 2, 4, 5, 6 или 7) 2 — порядковый номер серии Хг — условный габаритный размер по длине статора на одном диаметре (1 или 2) Хд — число полюсов (одно-, двух-или трехскоростной двигатель) Х4 — климатическое исполнение Xft — категория размещения. Характеристики двигателя приведены в ТУ 16—513.334—77 Электродвигатели асинхронные серии МАП 120—720 с тормозами серии ТМТ 12—72 .
[c.249]
Повторно-кратковременный номинальный режим работы, в котором работают крановые электродвигатели, получил условное обозначение S3. Он характеризуется тем, что время работы электродвигателя чередуется с периодами отключения его от сети, причем за кратковременный период работы двигателя его температура не успевает достигнуть той, которая соответствует данной нагрузке при длительной работе, а за время паузы Р двигатель не успевает охладиться до температуры окружающей среды. Повторно-кратковременный номинальный режим работы двигателя характеризуется относительной (в процентах) продолжительностью включения (ПВ) по отношению к продолжительностл всего цикла.
[c.125]
Повторно-кратковременный номинальный режим работы двигателя характеризуется относительной (в процентах) продолжительностью включения (ПВ) по отношению к продолжительностл всего цикла.
[c.125]
Электродвигатель — урок. Физика, 8 класс.
Рассмотрим техническое применение физических закономерностей (взаимосвязь магнитных и электрических явлений) на модели электродвигателя (рис. \(1\)).
Рис. \(1\)
Со стороны магнитного поля на вертикальные участки рамки будут действовать силы \(F\), направленные перпендикулярно току в рамке. Поскольку в вертикальных участках рамки ток имеет противоположное направление (в левой части рамки — вниз, а в правой — вверх), то и силы, действующие на вертикальные участки рамки, будут одинаковы по модулю, но противоположны по направлению (слева — вперёд, к наблюдателю, а справа — назад, от наблюдателя).
Действие равных по модулю, но противоположных по направлению сил на рамку приведёт к повороту рамки на \(180\)° против часовой стрелки, если смотреть на неё сверху.
Если каким-либо образом в этот момент изменить направление тока в рамке в другую сторону, то рамка сделает ещё пол-оборота против часовой стрелки. Таким образом, изменяя направление тока в рамке на противоположное каждые пол-оборота, можно заставить рамку вращаться в одну и ту же сторону.
Рассмотрим насаженную на вертикальную ось прямоугольную рамку \(ABCD\). Рамка представляет собой небольшое количество витков изолированного провода (рис. \(2\)). Концы провода соединяются с полукольцами \(2\).
Рис. \(2\)
Для соединения рамок с электрической цепью полукольца прижимаются к металлическим пластинам, которые называют щётками. Одна из щёток соединена с положительным полюсом источника, вторая соединена с отрицательным полюсом источника напряжения.
Так как за направление тока принимают движение от положительного полюса к отрицательному полюсу, то на участках проводника \(AB\) и \(CD\) токи противоположны по направлению. Поэтому силы, действующие на стороны рамки \(AB\) и \(CD\) направлены в противоположные стороны, что и вызывает поворот рамки (в данном случае по часовой стрелке). Так как к рамке присоединены полукольца, то и они тоже повернутся и образуют контакт уже с другой щёткой. При этом ток начнет протекать в другую сторону. Силы, возникающие при этом, будут продолжать вращать рамку в прежнем направлении (по часовой стрелке).
Так как к рамке присоединены полукольца, то и они тоже повернутся и образуют контакт уже с другой щёткой. При этом ток начнет протекать в другую сторону. Силы, возникающие при этом, будут продолжать вращать рамку в прежнем направлении (по часовой стрелке).
Вращение катушки с током в магнитном поле используется в устройстве электрического двигателя.
В технике применяют электродвигатели, обмотка которых содержится большое количество витков проволоки, которые размещаются в специальных прорезях железного цилиндра — ротора двигателя (рис. \(3\)). Иногда его называют якорем. Он служит для усиления магнитного поля, возникающего при протекании тока по виткам проволоки.
Рис. \(3\)
Магнитное поле, в котором вращается ротор двигателя, создаётся статором, который также является сильным электромагнитом. Питание электромагнита осуществляется от того же источника тока, что питает обмотку ротора. Внутри ротора проходит металлический вал — он по сути является осью вращения. Этот вал соединяется с механизмом, который нужно привести во вращение. И во время поворота якоря начинает вращаться весь механизм.
Этот вал соединяется с механизмом, который нужно привести во вращение. И во время поворота якоря начинает вращаться весь механизм.
Электродвигатели постоянного тока чаще всего можно встретить в транспорте — троллейбусы, трамваи, метро) или в промышленности (подъёмные краны, станки металлопроката).
При работе с легковоспламеняющимися веществами, например, с бензином или нефтью, используются безыскровые электродвигатели. Такие двигатели ставят в насосах нефтяных скважин и бензоколонках.
Кроме электродвигателей постоянного тока используют электродвигатели переменного тока. Они есть в каждой квартире, как составная часть стиральной машины, холодильника, пылесоса.
Почему все большее и большее используют электродвигатели? Это связано с их размерами (они меньше, чем тепловые аналоги той же мощности), но самое главное преимущество связано с воздействием на окружающую среду. Электродвигатели не выделяют выхлопные газы и дым. Например, электромобиль (начиная с производства комплектующих частей) за срок службы оказывается в 5-7 раз экологичнее, чем его аналог с тепловым двигателем. Мощности электродвигателя позволяют достичь высоких КПД.
Мощности электродвигателя позволяют достичь высоких КПД.
Условное обозначение электродвигателя на электрических схемах представлено на рисунке \(4\).
Рис. \(4\)
Борис Семёнович Якоби, русский учёный, считается одним из первых изобретателем электрических двигателей.
Отрицательным свойством любого двигателя является именно потеря энергии в виде рассеивания тепла, что приводит к перегреванию атмосферы при большом количестве двигателей.
Выбор электродвигателя и расчет его рабочих параметров
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
- Вентилятор
где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
- Насос
где Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
- Поршневой компрессор
где Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.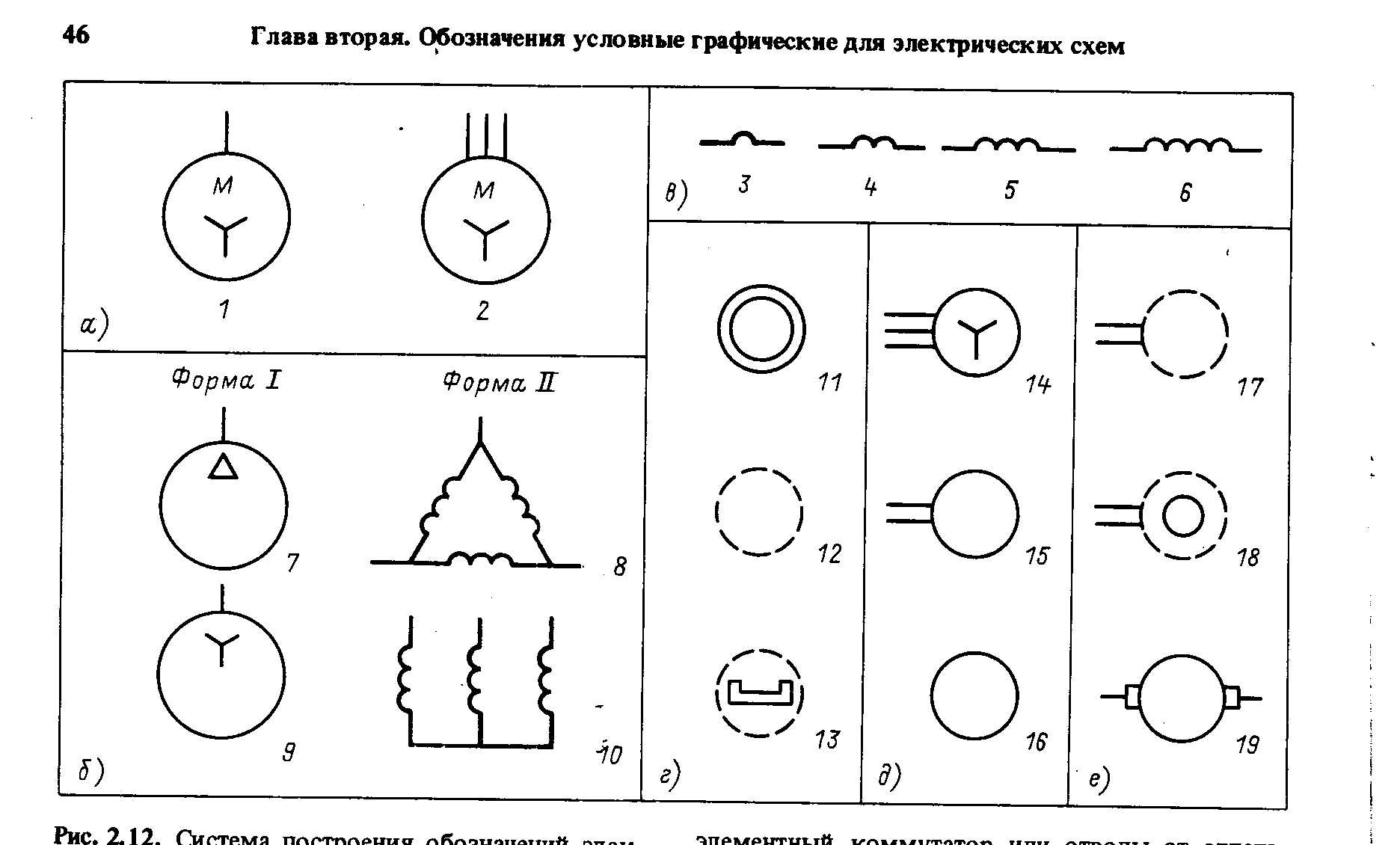
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды.
 Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями. - Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
 Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой:
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Элементы электрических крановых схем постоянного тока
Контроллеры с неодинаковой схемой замыкания применяют исключительно для электродвигателей последовательного возбуждения механизмов подъема.
В первом положении подъема обмотки электродвигателя включаются в сеть через пусковое сопротивление. При последующих положениях последовательно замыкаются накоротко соответствующие ступени сопротивления.
В положениях спуска обмотки электродвигателя включаются по потенциометрической схеме. Реверсируется всегда обмотка якоря. Скорость спуска при переходе с одного положения в последующее увеличивают, выводя ступени сопротивления включенного в цепь якоря и вводя сопротивление в параллельную ей цепь обмотки возбуждения.
При спуске легких грузов, не преодолевающих сопротивления механизмов, электродвигатель развивает момент, направленный в сторону спуска (двигательный режим). Работая в генераторном режиме при спуске тяжелых грузов, электродвигатель, начиная с определенной частоты вращения, тормозит груз, опускающийся под действием собственного веса. Контакты цепи управления в контроллере предназначены для осуществления схем нулевой блокировки и конечной защиты.
Для обеспечения конечной защиты и включения электромеханических тормозов в дополнение к контроллеру требуется электромагнитный контактор. Конечные выключатели воздействуют на тяговую катушку этого контактора. Электромеханические тормоза включаются блокировочными контактами контактора.
Конечные выключатели воздействуют на тяговую катушку этого контактора. Электромеханические тормоза включаются блокировочными контактами контактора.
Рассмотрим схему управления двигателем постоянного тока с контроллером КП-2026, приведенную на рис. 1. Контроллер имеет дугогасящую катушку LM3. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Q1 и Q2. Проследим цепь питания катушки контактора: один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
Рис. 1. Схема управления с контроллером КП-2026 и контактором
Двигатель, получив питание через все сопротивление резистора R, начнет вращаться на малых оборотах. При повороте барабана во второе, третье и четвертое положения уменьшается сопротивление в цепи двигателя и частота вращения его растет; в пятом положении сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую частоту вращения. При движении «Назад» схема будет работать аналогичным образом.
При движении «Назад» схема будет работать аналогичным образом.
Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит YB. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.
Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме, представленной на рис. 2. Контроллер имеет пять рабочих положений и три тормозных. Кроме главного барабана контроллер снабжен дополнительным переключающим барабаном, который переключается только тогда в другое положение, когда барабан проходит все положения торможения, возвращаясь из положений «Ход».
Рис. 2. Схема управления с контроллером типа КПТ
В тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение. На схеме обозначено: L1 — обмотка возбуждения; R — реостат регулировочный; R1 — резистор тормозной; YB — тормозной электромагнит; М — двигатель.
На рис. 3 показаны отдельные положения контроллера типа КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
Рис. 3. Развертка схемы с контроллером типа КПТ
Следующие четыре рабочих положения отличаются от первого тем,что сопротивление в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети.
Рис. 4. Схема управления с кулачковым контроллером ПКС-6006
Тормозной магнит включается и растормаживает механизм только в положениях «Ход», а в тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления RT и соединенного последовательно с ним добавочного тормозного сопротивления RF.
По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2—3 и 3—4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное, что показано стрелкой.
В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное, что показано стрелкой.
Схема управления двигателем постоянного тока с последовательным возбуждением приведена на рис. 4, а развертка его схемы в отдельных положениях контроллера — на рис. 6.22. Здесь применен кулачковый контроллер типа ПКС-6006.
При спуске груза двигатель включается по схеме «безопасный спуск». При этом обмотка возбуждения двигателя подключена к сети независимо от якоря через сопротивление. Якорь включен в сеть последовательно с дополнительными полюсами L2 с введением в его цепь резистора (R8—R9),
Наиболее сильное торможение, а следовательно, и наименьшая скорость наблюдаются в первых положениях контроллера, а с переходом его в следующие положения вследствие ослабления тормозного момента частота вращения постепенно возрастает. Скорость изменяют, ослабляя ток в цепи обмотки возбуждения введением в цепь возбуждения сопротивления резистора (R7—R6—R5—R4) и последовательно выключая из цепи якоря ступени резистора R4—R1, в связи с чем приложенное к якорю напряжение повышается.
При спуске легких грузов, не преодолевающих сопротивления механизма подъема, двигатель работает в нор-мальном режиме; при спуске тяжелых грузов он переключается на генераторный режим. Переход из двигательного режима в генераторный с изменением направления тока в обмотке якоря производится автоматически и плавно, без толчков.
Для управления двигателями постоянного тока, так же как и переменного, можно применять магнитные контроллеры. Схема управления с магнитным контроллером типа П, изображенная на рис. 6.23, предназначена для механизмов передвижения. Этот контроллер имеет симметричную схему включения, в которой предусмотрены торможение противовключением и регулирование частоты вращения пусковыми резисторами.
Проследим работу контроллера во всех его положениях. В нулевом положении двигатель отключен от сети. Реле нулевой блокировки KB получает питание лишь после включения рубильников силовой QS и контрольной SA цепей, срабатывает и самоблокируется через свой замыкающий контакт KB, подавая тем самым напряжение в цепи управления.
Рис. 5. Схема магнитного контроллера типа П
В первом положении «Вперед» через контакт командо-контроллера К2 включается катушка линейного контактора КМ, а через контакт КЗ — катушки контакторов ЩМ1 и 2КМ1 и двигатель включается в сеть при полностью введенном сопротивлении. Контакты контактора 1КМ1 замыкаются, и через них получает питание катушка реле противовключения KF. В свою очередь, при срабатывании реле KF его контакты замкнут цепь питания контакта К5 контроллера.
Катушки реле ускорения получат питание за счет падения напряжения на участках тормозного сопротивления RF1—RF3 и мгновенно разомкнут свои размыкающие контакты (эти контакты действуют с выдержкой времени на замыкание) Щ, 2К, ЗК- Во втором положении «Вперед» включается контактор противовключения KMF, шунтируя ступень резистора RF1 и катушку реле 1К, контакты которого замкнутся с выдержкой времени 1 с и подготовят к включению катушку контактора 1КМ.
В третьем положении «Вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения ЩМ, который после замыкания контактов Щ выведет ступень резистора RF2 и зашунтирует катушку 2К.
После срабатывания второго реле включится контактор 2КМ, выключит ступень RF3 резистора и зашунтирует катушку ЗК. Через замкнувшиеся контакты ЗК включится последний контактор ускорения ЗК и выведет ступень RF4 резистора. На этом пуск двигателя заканчивается.
Если перевести командоконтроллер сразу в третье положение, контакторы и реле начнут автоматически замыкаться в следующем порядке: ЩМ1 и 2КМ1, KF, KMF. Затем после выдержки времени 1 с замкнутся контакты 1К и включится 1КМ. Далее последовательно автоматически включаются контакты 2К (с выдержкой времени 0,8 с) 2КМ, ЗК (с выдержкой времени 0,8 с) и ЗКМ, чем и заканчивается запуск двигателя.
При необходимости быстрой остановки используют режим противовключения — командоконтроллер переводят в первое положение обратного хода. Двигатель, получая питание через контакты контакторов 1КМ2 и 2КМ2, продолжает вращаться по инерции в направлении «Вперед» и оказывается в режиме противовключения с полностью введенным сопротивлением в цепь якоря RF1—RF4\ ЭДС якоря в этом случае почти полностью уравновешивает напряжение сети, и реле KV (или реле KF, если движение происходило в обратном направлении) не сработает вплоть до полной остановки якоря.
Для управления двигателями подъема применяют магнитные контроллеры типа ПС (рис. 6.24). Контроллер имеет четыре ступени регулирования при работе двигателя на подъем и четыре при работе на спуск. Схема включения контакторов несимметрична и предусматривает различные режимы работы двигателя при установке рукоятки командоконтроллера в положение подъема или спуска.
Рис. 6. Схема управления с магнитным контроллером типа ПС
Линейный контактор КМ получает питание через контакт КЗ при подъеме груза и через контакт К4 при спуске груза. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель SQ, контакторы которого введены в цепь КЗ.
В первом и втором положениях рукоятки командо-контроллера при работе двигателя на подъем главная цепь двигателя шунтируется ступенью RF4 резистора посредством замыкающего контакта KF2, что дает возможность получить более глубокое регулирование скорости подъема, чем при простом реостатном шунтировании. При подъеме груза ступени RF6 и RF7 резистора шунтируются контактором KYA2.
При подъеме груза ступени RF6 и RF7 резистора шунтируются контактором KYA2.
Во втором положении рукоятки командоконтроллера включается контактор 1КМ, который шунтирует сопротивление RF1 и замыкает цепь катушки реле ускорения; его контакт подготавливает к включению цепь катушки контактора 2КМ. В третьем положении получает питание катушка контактора KF2, вследствие чего отключается ступень RF4 резистора, шунтирующая главную цепь двигателя. При установке рукоятки в четвертое положение последовательно включаются контакторы ускорения 2КМ и ЗКМ.
При быстром переводе рукоятки командоконтроллера в четвертое положение реле ускорения К замкнет свой контакт, когда двигатель достигнет 60—70 % своей номинальной частоты вращения. Катушки контакторов 2КМ и ЗКМ получат питание только после того, как замкнется контакт К. Также будет работать реле К и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза.
При спуске груза в первом положении командоконтроллера включаются контакторы KF1 и КМ2. Блокировать катушку контактора КМ2 замыкающим контактом KF1 необходимо, чтобы предотвратить свободное падение груза, так как при отключенном контакте KF1 и включенном контакте КМ2 двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
Блокировать катушку контактора КМ2 замыкающим контактом KF1 необходимо, чтобы предотвратить свободное падение груза, так как при отключенном контакте KF1 и включенном контакте КМ2 двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
При включенных контакторах KF1 и КМ2 якорь двигателя и обмотка возбуждения будут включены параллельно, двигатель работает с более жесткой характеристикой, и поэтому скорость опускания груза ограничена. При втором положении командоконтроллера откроется контакт К9, катушки контакторов ускорения 2КМ и ЗКМ будут отключены, а в цепь якоря вводятся сопротивления ступеней RF3 и RF2 резистора. Увеличение сопротивления в цепи якоря приводит к уменьшению частоты вращения в двигательном режиме и к возрастанию ее в генераторном режиме. В третьем положении откроется контакт К12, отключится катушка контактора КУЛ2, в цепь возбуждения будет введено сопротивление ступени RF7, ток возбуждения машины уменьшится, частота вращения возрастет.
При переводе командоконтроллера в четвертое положение включатся контакторы ускорения 1КМ, 2КМ и ЗКМ, которые зашунтируют ступени сопротивления RF1, RF2 и RF3 цепи якоря. Контакт KJ откроется, катушка контактора KYA1 отключится, а в цепь обмотки возбуждения будет введена ступень RF6 резистора, которая снизит ток возбуждения.
Двигатель при спуске груза можно остановить, постепенно переводя командоконтроллер из четвертого положения в первое. В случае необходимости быстрой остановки при спуске груза командоконтроллер сразу переводят в нулевое положение, при этом отключаются катушки контактора КМ2 и реле 2KF.
Якорь двигателя, его обмотка возбуждения и тормозной электромагнит отключаются от сети и замыкаются контактором на сопротивления RF2, RF3, RF5 и RF7; машина будет работать в режиме генераторного торможения с самовозбуждением. Через 0,4—0,6 с сработает реле 1KF, катушка которого шунтируется контактом КУА1, и включит контактор KYA2, закорачивающий ступень резистора RF7. После этого через 0,7— 1 с реле 2I{F откроет свой контакт в цепи контакторов KF1 и KF2. Якорь двигателя с обмоткой возбуждения теперь будет замкнут на ступень сопротивления RF4, и торможение усилится. Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
После этого через 0,7— 1 с реле 2I{F откроет свой контакт в цепи контакторов KF1 и KF2. Якорь двигателя с обмоткой возбуждения теперь будет замкнут на ступень сопротивления RF4, и торможение усилится. Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
В схеме предусмотрены блокировки, а именно: контакторы КМ1 и KF1 имеют механическую блокировку, исключающую их одновременное включение; контакторы KYA1 и 1К.М сблокированы так, что при переходе из третьего положения при спуске в четвертое положение сначала открывается KYA1, а затем ЩМ.
Сопротивления RF1 и RF6 больше всех остальных сопротивлений, и неправильная блокировка контакторов приведет к значительным броскам тока.
Магнитные контроллеры постоянного тока типов П и ПС рассчитаны только на электродвигатели и тормозные электромагниты последовательного возбуждения. При параллельном или смешанном возбуждении требуется специальное исполнение контроллеров.
Для более подробного ознакомления с работой магнитных контроллеров постоянного тока типов П и ПС ниже приведены развертки схемы для некоторых положений и характеристики моментов и частоты вращения сериесных электродвигателей, управляемых этими контроллерами.
Рис. 7. Момент М и частота вращения электродвигателей последовательного возбуждения, управляемых магнитными контроллерами типа П
В положении 1 изображена развертка главной цепи контроллера в момент включения. Контакторы ЩМ2 и 2КМ2 замкнуты, и ток проходит последовательно через якорь двигателя, обмотку возбуждения, тормозной магнит и сопротивление всех резисторов от RF1 до RF5. Так как сопротивление при этом настолько велико, что ток при неподвижном якоре не превышает 60—70% тока полной нагрузки, то электродвигатель не может развить достаточного момента для того, чтобы начать движение. Как только командо-контроллер будет поставлен в следующее положение и контактор KMF замкнется, сопротивление уменьшится настолько, что ток достигнет значения, превышающего ток полной нагрузки.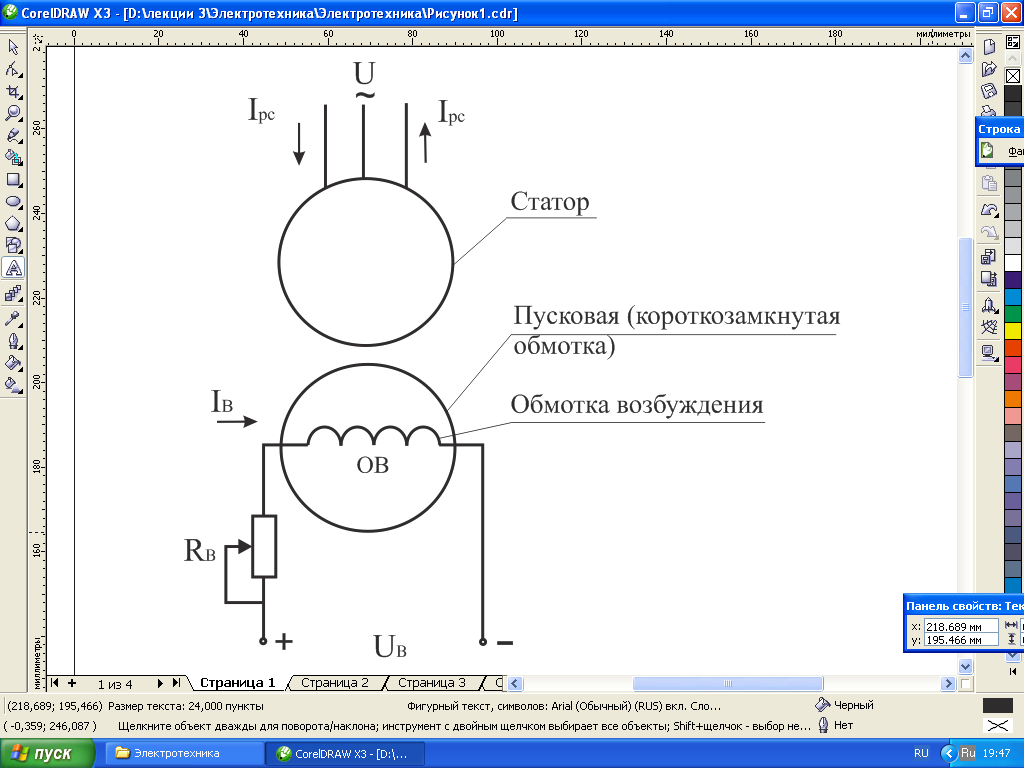 Это создаст избыточный момент, и механизм начнет ускорение.
Это создаст избыточный момент, и механизм начнет ускорение.
По мере увеличения частоты вращения ток, а следовательно, и момент электродвигателя падают по кривой. Как только частота вращения увеличится настолько, что момент двигателя станет равным моменту приложенной нагрузки, дальнейшее ускорение прекратится. В это время замкнется контактор 1КМ и момент электродвигателя увеличится.
Таким же образом происходит процесс ускорения и при замыкании контакторов 2КМ и ЗКМ, после чего двигатель оказывается включенным на полное напряжение и вращается с полной скоростью.
Эти рассуждения велись в предположении, что электродвигатель перед пуском находился в состоянии покоя. Иначе обстоит дело, если перед этим двигатель вращался в противоположном направлении. Для того чтобы остановить вращающийся электродвигатель, рукоятку ко-мандоконтроллера ставят в положение «Назад». При этом размыкаются контакторы 1КМ1 и 1КМ2 и замыкаются 2КМ1 и 2КМ2. К якорю электродвигателя теперь приложено напряжение обратной полярности, и последовательно с ним включено полное сопротивление резистора, ограничивающее ток и момент. Эта операция называется торможением противовключением. Момент электродвигателя меняет знак, и двигатель начинает резкое торможение до полной остановки.
Эта операция называется торможением противовключением. Момент электродвигателя меняет знак, и двигатель начинает резкое торможение до полной остановки.
Если цель данной операции — только остановить электродвигатель, то рукоятка контроллера после этого переводится в нулевое положение. Если же предполагалось изменить направление вращения, то контроллер оставляют в положении хода назад и ускорение в обратном направлении происходит так же, как было описано для хода вперед.
На рис. 7 штриховой линией нанесена характеристика противовключения при введении дополнительной регулировочной ступени резистора. Схема магнитного контроллера типа ПС, предназначенного для управления электродвигателями подъемных механизмов, построена несколько иначе. В положениях подъема она совпадает со схемой для контроллера П, за исключением того, что в первых двух положениях подъема путем некоторого изменения схемы тока параллельно якорю может быть включено сопротивление, снижающее скорость подъема легких грузов.
Рис. 8. Развертка силовой цепи в положении подъема магнитного контроллера типа ПС
Рис. 9. Развертка силовой цепи контроллера типа ПС в положении спуска
Во всех положениях спуска обмотка возбуждения включена не последовательно с якорем, как обычно, а параллельно, но последовательно с частью пускового сопротивления. Другая часть сопротивления включается последовательно с якорем с целью понизить напряжение на его зажимах.
Благодаря такой схеме включения ток в обмотке возбуждения почти не зависит от тока в якоре, и даже при токе, равном нулю в обмотке якоря, или токе обратного направления обеспечено возбуждение требуемых величины и направления. Этим характеристики в положениях спуска напоминают характеристики электродвигателя с параллельной обмоткой возбуждения. При шунтовом двигателе в каждом положении контроллера обеспечивается возможность спускать и легкие грузы, не преодолевающие потерь в механизме, и тяжелые грузы, стремящиеся своей массой вращать электродвигатель, который при этом работает как генератор, автоматически меняя направление тока в обмотке якоря и осуществляя динамическое торможение. Пуск и ускорение электродвигателя, осуществляемые при подъеме груза по принципам, распространяющимся и на механизмы передвижения (контроллер типа П), при спуске груза различаются тем, что одновременно с уменьшением сопротивления в цепи якоря вводится сопротивление в цепь обмотки возбуждения.
Пуск и ускорение электродвигателя, осуществляемые при подъеме груза по принципам, распространяющимся и на механизмы передвижения (контроллер типа П), при спуске груза различаются тем, что одновременно с уменьшением сопротивления в цепи якоря вводится сопротивление в цепь обмотки возбуждения.
Для иллюстрации пределов регулирования и изменения частоты вращения в зависимости от нагрузки в каждом положении контроллера служит график, по горизонтальной оси которого откладывают момент электродвигателя в процентах от момента его полной нагрузки, а по вертикальной оси — его частоту вращения. За 100 % принимается частота вращения при полном напряжении и моменте, равном 100%.
Такие характеристики для схемы передвижения (контроллер типа П) изображены на рис. 7, а для схемы подъема (контроллер типа ПС) — на рис. 10. Контроллер типа П (передвижения) имеет по три фиксированных положения для каждого направления вращения. Первое положение служит для противовключения, и при вращении электродвигателя с полной скоростью в обратном направлении в этом положении он развивает тормозной момент, составляющий около ПО % момента полной нагрузки. В положении 2 момент достигает значения примерно 140 % и начинается ускорение. При установившемся режиме и полной нагрузке скорость в этом положении не превышает 30 % номинальной.
В положении 2 момент достигает значения примерно 140 % и начинается ускорение. При установившемся режиме и полной нагрузке скорость в этом положении не превышает 30 % номинальной.
Положение 3 является последним положением, и при этом электродвигатель работает по своей автоматической характеристике. Между положениями 2 и 3 имеются два, а при больших мощностях двигателя три промежуточных положения, не фиксированных на командоконтроллере и служащих для смягчения пуска двигателя — уменьшения пусковых толчков тока и момента. Кривые на рис. 7, соответствующие этим положениям, обозначены ЗА и ЗБ. Контроллер типа ПС (для подъема) имеет по четыре фиксированных на командоконтроллере положения, что вполне достаточно для плавной регулировки скорости как при подъеме, так и при спуске любого груза в пределах грузоподъемности крана.
Рис. 10. Момент М и частота вращения электродвигателей последовательного возбуждения, управляемых магнитными контроллерами типа ПС
Первые два положения, обеспечивающие ускорение подъема груза, могут быть использованы также для медленного подъема легкого груза путем незначительного изменения схемы цепи управления, в результате которого параллельно якорю включается часть пускового сопротивления.
В первом положении подъема электродвигатель развивает момент, приблизительно равный 40 % момента полной нагрузки. Этого достаточно для ускорения подъема легких грузов. Во втором положении пусковой момент достигает 130 % момента полной нагрузки, и это положение может быть использовано для пуска двигателя с любой нагрузкой, вплоть до номинальной грузоподъемности крана, а также для подъема различных грузов с пониженной скоростью.
Положение соответствует скорости, составляющей примерно 50 % номинальной при подъеме полного груза, а в положении, являющимся последним, электродвигатель работает по своей автоматической характеристике.
Рис. 11. Схема динамического торможения магнитных контроллеров типов П и ПС
Рис. 12. Реле управления магнитных контроллеров
Между положениями 3 и 4 имеется одно, а в мощных контроллерах два промежуточных пусковых положения. Положения эти не фиксированы на командоконтрол-лере и служат только для снижения пусковых толчков. Кривая на рис. 10, соответствующая этому положению, обозначена 4А.
Кривая на рис. 10, соответствующая этому положению, обозначена 4А.
В нулевом положении командоконтроллера, а также при внезапном прекращении подачи электроэнергии двигатель автоматически замыкается на резистор, вследствие чего начинаются динамическое торможение и работа механического тормоза. Если по какой-либо причине механический тормоз откажет, то даже самый тяжелый груз опустится с минимальной скоростью. Развертка силовой схемы для этого случая показана на рис. 11.
В первом положении спуска электродвигатель развивает около 20% пускового момента, что вполне достаточно для преодоления трения в механизме и для ускорения. При спуске тяжелых грузов момент быстро меняет знак — электродвигатель переходит на торможение. Происходит это при скорости около 10 % номинальной, а затем скорость увеличивается, достигая при полной нагрузке около 20 % номинальной. В этом положении обеспечивается безопасный спуск самых тяжелых грузов.
В положениях втором, третьем и четвертом скорость при тормозном моменте, равном 64%, что примерно соответствует массе номинального груза, достигает соответственно 40, 100 и 170% номинальной.
Кроме этих положений контроллеры типа ПС имеют еще два или три положения, не фиксированных на командо-контроллере и предназначенных для смягчения спуска груза — уменьшения толчков тока и момента.
Контроллеры типов П и ПС являются автоматическими, т. е. требуемая последовательность замыкания и размыкания контакторов обеспечивается автоматически при помощи системы реле. Ниже кратко описано реле, контролирующее работу магнитного (контакторного) контроллера.
Представленная на рис. 12 конструкция реле является в основном общей для всех реле, применяемых в схемах контакторного контроллера. Якорь при помощи пружины прижимается острием ребра к пластине и ярму, состоящему из угольника и круглого сердечника, на котором насажена катушка. С якорем реле связана система, образованная одним или двумя разомкнутыми контактами и одним замкнутым контактом, служащим одновременно упором для якоря.
Якорь только тогда притягивается к сердечнику, когда магнитный поток в магнитной системе возрастает до значения, достаточного для преодоления действия пружины, и отпадает в момент, когда этот поток становится меньше необходимого для удержания притянутого якоря. Магнитная система реле имеет большую площадь сечения, что обусловливает большой магнитный поток. При замыкании катушки реле накоротко (без предварительного отключения ее от источника питания) магнитный поток и ток в катушке спадают не мгновенно, а по кривой, представленной на рис. 13.
Магнитная система реле имеет большую площадь сечения, что обусловливает большой магнитный поток. При замыкании катушки реле накоротко (без предварительного отключения ее от источника питания) магнитный поток и ток в катушке спадают не мгновенно, а по кривой, представленной на рис. 13.
Через время, которое определяется магнитными данными реле, поток спадает до величины х, недостаточной для удержания якоря. Перемещение этой точки х, а следовательно, и время отпадания якоря реле можно регулировать, изменяя нажатие пружины.
Если внутри катушки поместить массивный медный цилиндр, то ток может медленно спадать и при размыкании катушки. В этом случае медный цилиндр явится как бы вторичной короткозамкнутой обмоткой, и с удерживающим потоком будет сцеплен ток этой вторичной обмотки.
Реле такой же конструкции используют в контакторных контроллерах в качестве реле напряжения. При достаточном для притягивания якоря напряжении на зажимах катушки, а следовательно, и числе ампер-витков якорь замкнет одну и разомкнет вторую систему контактов. Напряжение срабатывания реле в этом случае можно регулировать, изменяя натяг пружины или зазор между якорем и сердечником.
Напряжение срабатывания реле в этом случае можно регулировать, изменяя натяг пружины или зазор между якорем и сердечником.
Принцип действия реле для управления контакторным контроллером рассмотрим на нижеследующих примерах. На рис. 14 представлена часть схемы контакторного контроллера, состоящая из двух смежных ступеней пускового резистора (Rl—R2 и R2—R3), двух контакторов KMF и ЩМ, катушки контактора ЩМ, катушки реле Щ и его контактов.
В положении, показанном на рис. 14, оба контактора разомкнуты и ток электродвигателя проходит через обе ступени резистора, причем параллельно ступени R1—R2 включена катушка реле Щ. При этом падения напряжения в секции резистора R1—R2, являющегося в то же время напряжением на катушке Щ, достаточно для притягивания и удержания реле, поэтому его контакты разомкнуты и катушка контактора ЩМ не возбуждена.
Если контактор KMF замкнется под действием своей катушки (не показана на схеме), то ступень резистора R1—R2 окажется замкнутой накоротко, а вместе с ней и катушка реле Щ. Якорь реле отпадает не сразу вследствие постепенного падения тока в катушке, и до того как он отпадет, схема имеет вид, представленный на рис. 15.
Якорь реле отпадает не сразу вследствие постепенного падения тока в катушке, и до того как он отпадет, схема имеет вид, представленный на рис. 15.
Рис. 13. График спадания магнитного потока реле времени
Рис. 14. Схема включения реле первой ступени ускорения
По истечении времени, определяемого уставкой реле, якорь его отпадает, замкнет контакты и вызовет замыкание контактора ЩМ. Если катушку еще одного реле включить параллельно ступени R1—R3, то контактами этого реле можно замкнуть следующий контактор точно так же, как было описано для контактора ЩМ. Комбинацией из этих реле и контакторов осуществляется автоматический контроль времени пуска контакторного контроллера типа П.
Для вывода последней ступени резистора при контроллере, имеющем четыре пусковые ступени, достаточно выдержки времени, определяемой временем срабатывания одного контактора. В этом случае реле является излишним и катушка последнего контактора замыкается блок-контактами предыдущего контактора.
Автоматический пуск контроллером типа ПС производится иным способом. В схеме этого контроллера катушка контактора ускорения приводится в действие контактами реле, включенного параллельно якорю и работающего как реле напряжения. По мере увеличения частоты вращения электродвигателя возрастает напряжение на его щетках, и когда частота вращения достигнет значения, при котором безопасно вывести следующую ступень резисто — ра, якорь реле притянется, замкнет свои контакты и включит катушку очередного контактора ускорения.
Рис. 15. Схема включения реле и контакторов ускорения
Рис. 16. Схема включения реле первой и второй ступеней ускорения
Рис. 17. Схема работы реле торможения контроллера типа ПС
При генераторном режиме резкое торможение и замедление вращающегося электродвигателя, осуществляемые усилением его поля или уменьшением сопротивления в цепи якоря, не менее вредны, чем резкое ускорение; в схеме контроллера типа ПС предусмотрен автоматический контроль времени замедления.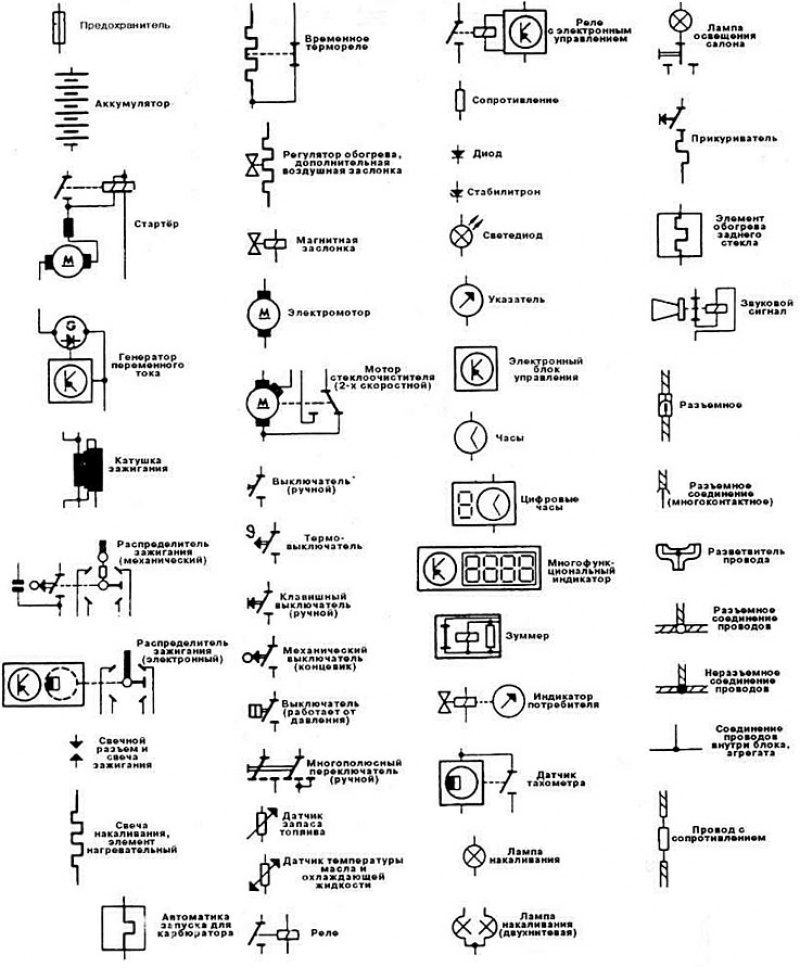
На рис. 17 показана часть схемы контроллера типа ПС для четвертого положения спуска (максимальная скорость), поясняющая работу реле торможения. Как было указано ренее, в этом положении, как и во всех положениях спуска, якорь электродвигателя с частью резистора образует одну цепь, а обмотка возбуждения с се-риесным тормозным магнитом и другой частью резистора — вторую цепь, параллельную первой.
Все контакты командоконтроллера замкнуты. Катушка замкнутого контактора 2Т возбуждена, а следовательно, его контакты разомкнуты. При резком переводе командоконтроллера в нулевое положение контактор IT не разомкнётся, а контактор 2Т не замкнется, пока не отпадет якорь реле торможения. Катушка этого реле снабжена медным цилиндром; с момента отключения его намагничивающей обмотки до момента отпадания якоря проходит около 0,75 с, что достаточно для значительного снижения частоты вращения электродвигателя.
После замыкания контактора 2Т и размыкания контактора IT схема принимает свой нормальный вид для нулевого положения, аналогичный представленному на рис.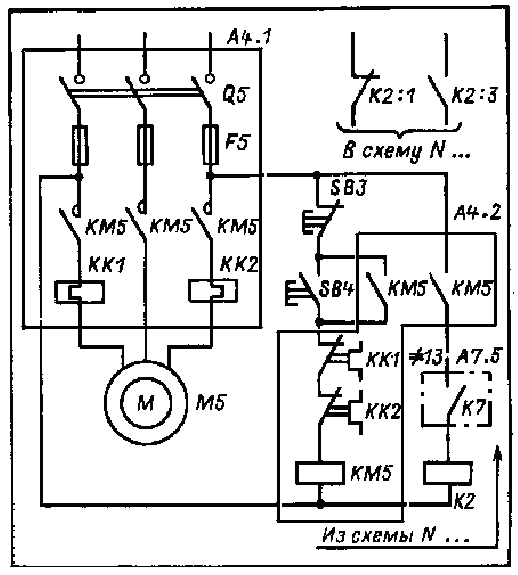 6.30.
6.30.
Рис. 18. Схема работы реле противовключения контроллера типа П
Контроль торможения противовключением показан на схеме рис. 6.37, поясняющей принцип работы реле противовключения контроллера типа П. На схеме изображена цепь во втором положении хода вперед.
Рассмотрим два случая. При пуске из состояния покоя сразу же в момент включения — замыкания контакторов КМ1 и КМ2 — реле КТ замкнется, так как к его катушке приложено падение напряжения в цепи якоря и в ступени. резистора R1—R5, являющейся значительной частью пускового резистора. Замкнувшись, реле КТ замкнет цепь катушки контактора KMF и позволит произвести нормальный пуск по принципу, описанному ранее. Иначе обстоит дело, если в этом положении двигатель продолжает вращаться в обратную сторону. Тогда его противо-электродвижущая сила действует в обратном направлении по отношению к падению напряжения в резисторе до тех пор, пока электродвигатель не остановится, электродвижущая сила его не станет равной нулю и при дальнейшем ускорении не изменит знак на совпадающий с падением напряжения в пусковом резисторе.
Так как катушка реле противовключения КТ включена параллельно участку цепи, включающей часть резистора и якорь двигателя, то в момент торможения противовключением напряжение на его клеммах равно разности напряжений в обоих этих элементах и недостаточно для притяжения якоря.
По мере уменьшения частоты вращения электродвигателя напряжение в его якоре падает, а напряжение в катушке реле возрастает. Регулировкой реле можно добиться замыкания его и начала ускорения в обратном направлении при любом значении частоты вращения. Обычно реле устанавливают так, чтобы оно сработало приблизительно при состоянии покоя электродвигателя.
Таким образом, в этой схеме реле автоматически защищает от пуска в обратную сторону, если электродвигатель еще не остановился, без чего толчки пускового тока достигли бы недопустимой величины.
Кроме нормального исполнения, когда для каждого электродвигателя предназначен отдельный контроллер, возможно такое исполнение контроллеров, при котором двумя электродвигателями, работающими на общий привод, управляет один контроллер. Эти контроллеры называются дуплексными и имеют типовое обозначение ДП для механизмов передвижения и ДПС для механизмов подъема.
Эти контроллеры называются дуплексными и имеют типовое обозначение ДП для механизмов передвижения и ДПС для механизмов подъема.
Каждый электродвигатель дуплексного управления снабжен отдельными контакторами и пусковым резистором. Катушки однозначных контакторов обоих электродвигателей соединены параллельно и управляются одним комплектом реле и одним командоконтроллером. При такой схеме можно управлять двумя двигателями, жестко-связанными и работающими на общий привод, не опасаясь неравномерного распределения нагрузки между ними.
Для возможности работать в аварийном случае на одном электродвигателе, отключив другой, панели дуплексных контроллеров для каждого электродвигателя снабжены двухполюсным рубильником. Поскольку в дуплексном контроллере предусмотрен только один комплект реле управления, все они при помощи многополюсного рубильника могут быть переключены в цепь работающего электродвигателя. Так как в контроллере подъема обязательно имеется тормозной магнит последовательного включения, может оказаться необходимым, отключив один из электродвигателей, оставить тормоз его действующим.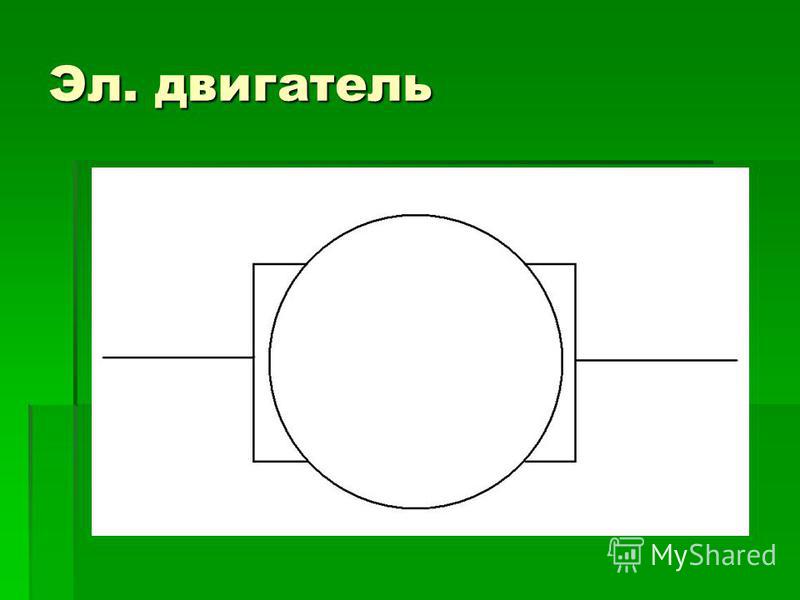 Такой случай возможен, например, когда тормоз установлен не на конце вала электродвигателя, а на одном из промежуточных валов или когда усилия одного оставшегося тормоза недостаточно для удержания груза.
Такой случай возможен, например, когда тормоз установлен не на конце вала электродвигателя, а на одном из промежуточных валов или когда усилия одного оставшегося тормоза недостаточно для удержания груза.
Для того чтобы облегчить это переключение, на панели дуплексного контроллера типа ДПС устанавливают два четырехполюсных рубильника, переключающих тормозной магнит аварийного электродвигателя последовательно в цепь оставшегося, а также развивающих цепь динамического торможения аварийного электродвигателя. Ввиду последнего обстоятельства небезразлично положение рубильников во время нормальной работы обоих электродвигателей.
Для контроллеров типа ДП такого переключения не предусмотрено, так как применять тормоза, связанные с контроллером, для механизма передвижения необязательно. Но даже в случае их использования отключение одного из них не так опасно, как в механизме подъема.
—
Рассмотрим схему управления двигателем постоянного тока с контроллером КГ1-2026, приведенную на рис.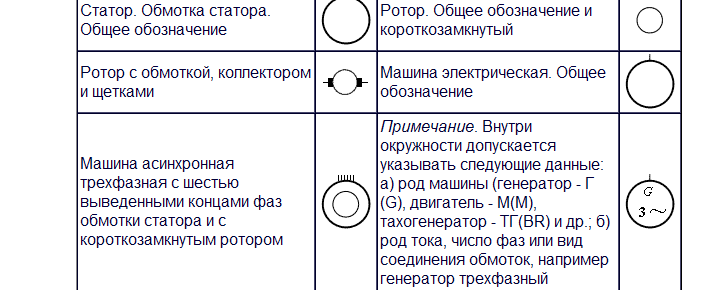 1.
1.
При установке барабана контроллера в первое рабочее положение включается контактор, остающийся включенным до перевода барабана в нулевое положение. Отключение контактора также происходит при размыкании одного из конечных выключателей. Проследим цепь питания катушки контактора: один конец ее включен в главную цепь, а второй конец ее соединен с пальцем 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединяется со вторым проводом главной цепи.
Контактор включится и палец Л11 контроллера окажется под напряжением. При повороте контроллера в положение «вперед» сегменты барабана соединят ЛИ с С1 и через обмотку возбуждения двигателя и якорь потечет ток по цепи: палец С2 — сегмент барабана — палец Р1 — сопротивление R — палец Р5 — дугога-сящая катушка — палец К — сегмент барабана — палец Л1 — троллейный контакт — провод Л2 сети питания. Двигатель, получив питание через все сопротивление R, начнет вращаться на малых оборотах.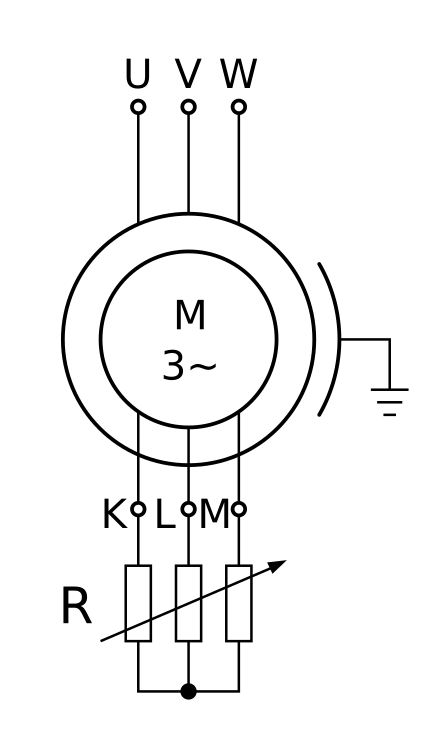 Поворот барабана во 2-е, 3-е и 4-е положения уменьшает сопротивление в цепи двигателя, скорость вращения его растет и в положении 5 сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую скорость. При движении «назад» схема будет работать аналогичным образом.
Поворот барабана во 2-е, 3-е и 4-е положения уменьшает сопротивление в цепи двигателя, скорость вращения его растет и в положении 5 сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую скорость. При движении «назад» схема будет работать аналогичным образом.
Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит.
Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.
Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме, изображенной на рис. 2. Контроллер имеет рабочих положений и тормозных. Кроме главного барабана, контроллер имеет дополнительный переключающий барабан, который переключается на другое положение только тогда, когда главный барабан проходит все положения торможения, возвращаясь от положений «ход». В тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение.
Рис. 1. Схема управления с контроллером КП и контактором
На рис. 3 показаны отдельные положения контроллера КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
Рис. 2. Схема управления с контроллером КПТ
В первом рабочем положении ток от провода сети последовательно проходит через обмотку возбуждения, якорь двигателя все пусковое сопротивление и конечный выключатель главного тока к проводу. Следующие рабочие положения 2—5 отличаются от первого тем, что величина сопротивления в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети. Тормозной магнит включается и растормаживает механизм только на положениях «ход», а на тормозных положениях контроллера он не получает питания и тормозит механизм.
Рис. 3. Развертка схемы с контроллером КПТ
В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления 2—5 и соединенного последовательно с ним добавочного тормозного сопротивления.
По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2—3 и 3—4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направлений тока в его обмотке возбуждения меняется на обратное.
Схема управления двигателем постоянного тока с последовательным возбуждением приведена на рис. 4, развертка его схемы на отдельных положениях контроллера приведена на рис. 120. Здесь применен кулачковый контроллер типа ПКС-6006.
При спуске груза двигатель включается по схеме «безопасного спуска». При этом обмотка возбуждения двигателя подключается к сети независимо от якоря через сопротивление. Якорь включен в сеть последовательно с введенным в его цепь сопротивления.
Наиболее сильное торможение, а следовательно, и наименьшая скорость, получается на первых положениях контроллера, а с переходом его в следующие положения, вследствие ослабления тормозного момента, скорость постепенно возрастает. Изменение скорости достигается ослаблением тока в цепи обмотки возбуждения (введением в цепь возбуждения сопротивления Р7—Р6—Р5— Р4 и последовательным выключением из цепи якоря ступеней сопротивления Р4—Р1, что дает повышение приложенного к якорю напряжения).
Изменение скорости достигается ослаблением тока в цепи обмотки возбуждения (введением в цепь возбуждения сопротивления Р7—Р6—Р5— Р4 и последовательным выключением из цепи якоря ступеней сопротивления Р4—Р1, что дает повышение приложенного к якорю напряжения).
При спуске легких грузов, не преодолевающих сопротивление механизма подъема, двигатель работает в нормальном режиме, при спуске тяжелых грузов он переключается на генераторный режим.
Переход из двигательного режима в генераторный, с изменением направления тока в обмотке якоря, производится автоматически и плавно, без толчков.
Для управления двигателями постоянного тока так же, как и переменного, могут применяться магнитные контроллеры.
Схема управления с магнитным контроллером типа П, изображенная на рис. 5, предназначена для механизмов передвижения. Этот контроллер является регулируемым и дает возможность осуществить торможение противовключением.
Проследим работу контроллера во всех его положениях. В нулевом положении двигатель отключен от сети. Реле нулевой блокировки РБ получает питание лишь после включения рубильников силовой IP и контрольной 2Р цепей, срабатывает и самоблокируется через свой нормально открытый контакт РБ, подавая этим самым напряжение в цепи управления.
В нулевом положении двигатель отключен от сети. Реле нулевой блокировки РБ получает питание лишь после включения рубильников силовой IP и контрольной 2Р цепей, срабатывает и самоблокируется через свой нормально открытый контакт РБ, подавая этим самым напряжение в цепи управления.
В положении «вперед» через контакт командоконтроллера К.2 включается катушка линейного контактора Л, одновременно через контакт К4 включаются катушки контакторов 1В и 2В и двигатель включается в сеть при полностью введенном сопротивлении.
Контакты контактора 1В замыкаются и через них получает питание катушка реле противовключения РВ. В свою очередь, при срабатывании реле РВ его контакты замкнут цепь, питания контакта К5 контроллера.
Рис. 4. Схема управления с кулачковым контроллером ПКС-6006
Рис. 5. Развертка схемы с контроллером ПКС-6006 (Д. П. — дополнительный полюс)
Катушки реле ускорения получат питание за счет падения напряжения на участках тормозного сопротивления Р1—РЗ и мгновенно разомкнут свои нормально закрытые контакты (эти контакты действуют с выдержкой времени на замыкание). В положении 2 «вперед» включается контактор про-тивовключения, шунтируя ступень сопротивления Р1 и катушку реле , контакты которого замкнутся с выдержкой времени в 1 сек и подготовят к включению катушку контактора. В положении 3 «вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения, который после замыкания контактов 1РУ выведет ступень сопротивления и зашунтирует катушку.
В положении 2 «вперед» включается контактор про-тивовключения, шунтируя ступень сопротивления Р1 и катушку реле , контакты которого замкнутся с выдержкой времени в 1 сек и подготовят к включению катушку контактора. В положении 3 «вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения, который после замыкания контактов 1РУ выведет ступень сопротивления и зашунтирует катушку.
Рис. 6. Схема магнитного контроллера П
После срабатывания второго реле включится контактор 2У, выключит ступень РЗ сопротивления и зашунтирует катушку ЗРУ. Через замкнувшиеся контакты ЗРУ включится последний контактор ускорения ЗУ и выведет ступень сопротивления Р4. На этом пуск двигателя заканчивается.
Если перевести командоконтроллер сразу на третье положение, контакторы и реле начнут автоматически замыкаться в следующем порядке: 1В и 2В, РВ, П. Затем после выдержки времени 1 сек замкнутся контакты 1РУ и включится 1У. Далее последовательно и автоматически включаются контакты 2РУ и (с выдержкой времени 0,8 сек) 2У, ЗРУ и (с выдержкой времени около 0,5 сек) ЗУ, на чем и заканчивается запуск двигателя.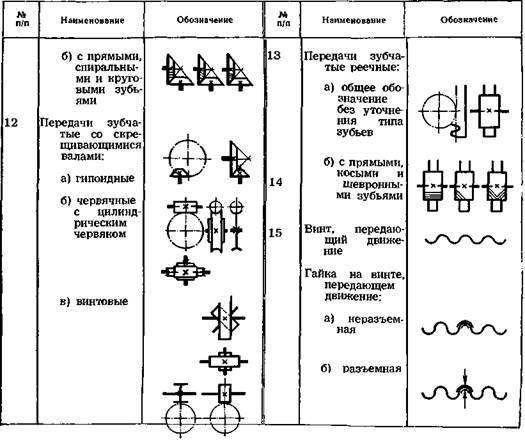
При необходимости быстрой остановки используется режим противовключения — командоконтроллер переводят “в первое положение обратного хода. Двигатель получает питание через контакты контакторов 1Н и 2Н и, продолжая вращаться по инерции в направлении «вперед», оказывается в режиме противовключения с полностью введенным сопротивлением в цепь якоря Р1—Р5\ электродвижущая сила якоря в этом случае почти полностью уравновешивает напряжение сети и реле РН (или реле РВ, если движение происходило в обратном направлении) не сработает вплоть до полной остановки якоря.
Для управления двигателями подъема применяются магнитные контроллеры типа ПС.
Схема контроллера приведена на рис. 7.
Контроллер имеет четыре ступени регулирования при работе двигателя «на подъем» и четыре при работе «на спуск». Схема включения контакторов несимметрична и осуществляет различные режимы работы двигателя при установке рукоятки командоконтроллера в положение «подъем» или «спуск».
Линейный контактор получает питание через контакторы КЗ при подъеме и через К2 при спуске груза. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель KB, контакты которого введены в цепь КЗ.
Для ограничения подъема крюка выше допустимого предела служит конечный выключатель KB, контакты которого введены в цепь КЗ.
В первом и втором положениях рукоятки командоконтроллера при работе двигателя на подъем главная цепь двигателя шунтируется сопротивлением Р4 посредством нормально закрытого контакта 2Т, что дает возможность получить более глубокое регулирование скорости при подъеме, чем при простом реостатном шунтировании.
При подъеме груза сопротивления Р6 и Р7 шунтируются контактором 2М.
Рис. 7. Схема управления с магнитным контроллером типа ПС
Во втором положении рукоятки командоконтроллера включается контактор, который шунтирует сопротивление Р1 и замыкает цепь катушки реле ускорения РУ, а его контакт подготавливает к включению цепь катушки контактора 2У.
В третьем положении получает питание катушка контактора 2Т, вследствие чего отключается сопротивление Р4, шунтирующее главную цепь двигателя. При установке рукоятки в четвертое положение последовательно включаются контакторы ускорения 2У и ЗУ.
При быстром переводе рукоятки командоконтроллера в четвертое положение реле ускорения РУ замкнет свой контакт, когда двигатель достигнет 60—70% своей номинальной скорости. Катушки контакторов 2У и ЗУ получат питание только после того, как замкнется контакт РУ.
Также будет работать реле РУ и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза.
При спуске груза в первом положении командоконтроллера включаются контакторы 1Т и Я. Блокировка катушки контактора Я нормально открытым контактом IT необходима для предотвращения свободного падения груза, так как при отключенном контакте 1Т и включенном Я двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
При включенных контакторах 1Т и Я якорь двигателя и обмотка возбуждения будут включены параллельно, двигатель будет работать с более жесткой характеристикой и поэтому скорость опускания груза будет ограничена.
При втором положении командоконтроллера откроется контакт К9, катушки контакторов ускорения 2У и ЗУ будут отключены, в цепь якоря будут введены сопротивления РЗ и Р2.
Увеличение сопротивления в цепи якоря приводит к уменьшению скорости в двигательном и возрастанию ее в генераторном режиме.
В третьем положении откроется контакт Д72, отключится катушка контактора 2М, в цепь возбуждения будет введено сопротивление Р7, ток возбуждения машины уменьшится, скорость возрастет.
При переводе командоконтроллера в четвертое положение включатся контакторы ускорения 1У,2У и ЗУ, которые зашунтируют сопротивления PI, Р2 и РЗ цепи якоря. Контакт КИ откроется, катушка контактора 1М отключится и. в цепь обмотки возбуждения будет введено сопротивление Р6, которое снизит величину тока возбуждения.
Остановка двигателя при спуске может быть сделана постепенным переводом командоконтроллера из четвертого положения в первое.
При необходимости быстрой остановки груза при спуске командоконтроллер сразу переводят в нулевое положение, при этом отключаются катушка контактора Я и реле 2РТ.
Якорь двигателя, его обмотка возбуждения и тормозной электромагнит отключаются от сети и замыкаются контактором IT на сопротивления Р2, РЗ, Р5 и Р7, машина будет работать в режиме генераторного торможения с самовозбуждением.
Через 0,4—0,6 сек сработает реле 1РТ, катушка которого шунтируется контактом 1М, и включит контактор 2М, закорачивающий сопротивление Р7.
После этого через 0,7—1,0 сек реле 2РТ откроет свой контакт в цепи контакторов 1Т и 2Т.
Якорь двигателя с обмоткой возбуждения теперь будет замкнут на сопротивление Р4 и торможение усилится.
Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
Величины Р1 и Р6 больше всех остальных сопротивлений и неправильная блокировка контакторов приведет к значительным броскам тока.
—
Рассмотрим схему управления двигателем постоянного тока с контроллером типа КП-2026, приведенную на рис. 1.
Рис. 1. Схема управления с контроллером КП и контактором
Рис. 2. Схема управления с контроллером КПТ
Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит.
Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.
Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме на рис. 129. Контроллер имеет пять рабочих положений и три тормозных. Кроме главного барабана, контроллер имеет дополнительный переключающий барабан, который переключается на другое положение только тогда, когда барабан проходит все положения торможения, возвращаясь от положений «Ход». В тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение.
На рис. 3 показаны отдельные положения контроллера КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
В первом рабочем положении ток от провода Л1 сети последовательно проходит через обмотку возбуждения, якорь двигателя, все пусковое сопротивление и конечный выключатель главного тока к проводу Л2. Следующие четыре рабочих положения отличаются от первого тем, что величина сопротивления в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети. Тормозной магнит включается и растормаживает механизм только на положениях «Ход», а на тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления Rn и соединенного последовательно с ним добавочного тормозного сопротивления RT.
На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети. Тормозной магнит включается и растормаживает механизм только на положениях «Ход», а на тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления Rn и соединенного последовательно с ним добавочного тормозного сопротивления RT.
По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2—3 и 3—4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное.
Схема управления двигателем постоянного тока с последовательным возбуждением приведена на рис. 4, развертка его схемы на отдельных положениях контроллера приведена на рис. 5. Здесь применен кулачковый контроллер типа ПКС-6006.
Рис.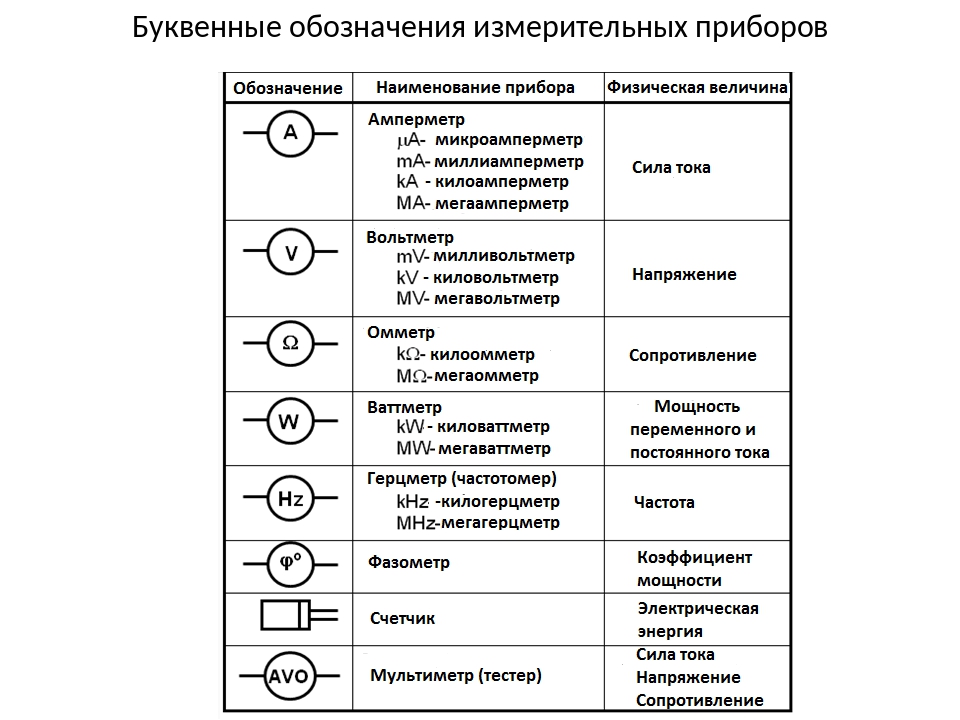 3. Развертка схемы с контроллером КПТ
3. Развертка схемы с контроллером КПТ
При спуске груза двигатель включается по схеме «безопасного спуска». При этом обмотка возбуждения двигателя подключена к сети независимо от якоря через сопротивление. Якорь включен в сеть последовательно с введенным в его цепь сопротивлением (Р8-Р9).
Наиболее сильное торможение, а следовательно, и наименьшая скорость, получается на первых положениях контроллера, а с переходом его в следующие положения вследствие ослабления тормозного момента скорость постепенно возрастает. Изменение скорости достигается ослаблением тока в цепи обмотки возбуждения введением в цепь возбуждения сопротивления (Р7-Р6-Р5-Р4) и последовательным выключением из цепи якоря ступеней сопротивления Р4-Р1, что дает повышение приложенного к якорю напряжения.
Рис. 4. Схема управления с кулачковым контроллером ПК.С-6006
При спуске легких грузов, не преодолевающих сопротивление механизма подъема, двигатель работает в нормальном режиме, при спуске тяжелых грузов он переключается на генераторный режим.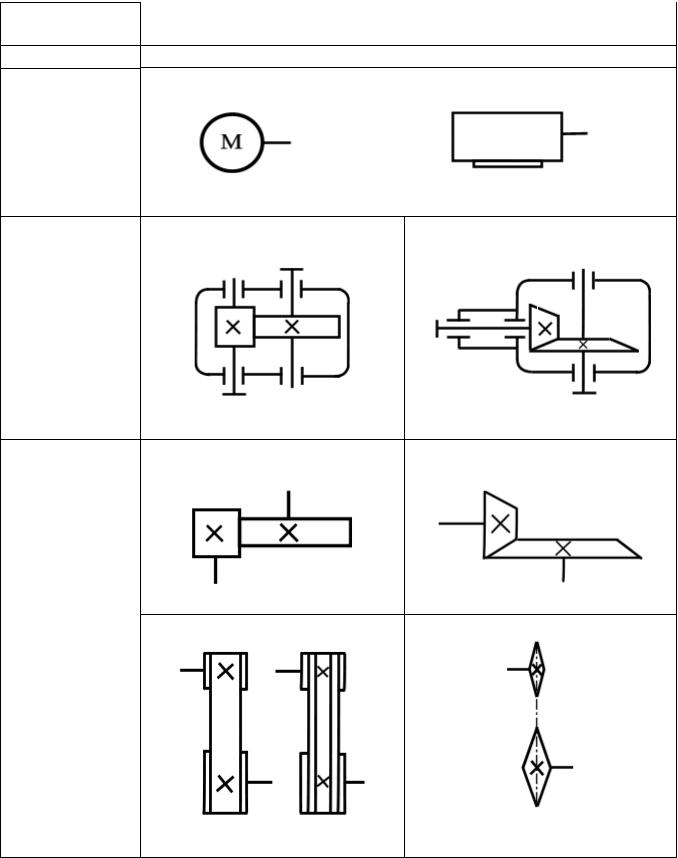
Переход из двигательного режима в генераторный, с изменением направления тока в обмотке якоря, производится автоматически и плавно, без толчков.
Для управления двигателями постоянного тока так же, как и переменного, могут применяться магнитные контроллеры.
Схема управления с магнитным контроллером типа П, изображенная на рис. 6, предназначена для механизмов передвижения. Этот контроллер имеет симметричную реверсивную схему включения, в которой предусмотрено торможение противовключением и регулирование скорости пусковыми сопротивлениями.
Рис. 5. Развертка схемы с контроллером ПКС-6006
Рис. 6. Схема магнитного контроллера типа П
Проследим работу контроллера во всех его положениях. В нулевом положении двигатель отключен от сети. Реле нулевой блокировки РБ получает питание лишь после включения рубильников силовой 1Р и контрольной 2Р цепей, срабатывает и самоблокируется через свой нормально открытый контакт РБ, подавая этим самым напряжение в цепи управления.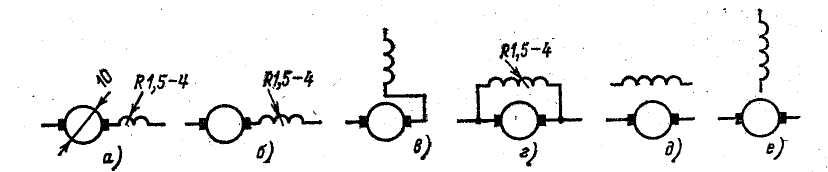
В первом положении «Вперед» через контакт командоконтроллера К2 включается катушка линейного контактора Л, одновременно через контакт КЗ включаются катушки контакторов 1В и 2В, и двигатель включается в сеть при полностью введенном сопротивлении.
Контакты контактора 1В замыкаются и через них получает питание катушка реле противовключения РВ. В свою очередь, при срабатывании реле РВ его контакты замкнут цепь питания контакта К5 контроллера.
Катушки реле ускорения получат питание за счет падения напряжения на участках тормозного сопротивления Р1-РЗ и мгновенно разомкнут свои нормально закрытые контакты (эти контакты действуют с выдержкой времени на замыкание) 1РУ, 2РУ, ЗРУ. Во втором положении «Вперед» включается контактор противовключения П, шунтируя ступень сопротивления Р1 и катушку реле 1РУ, контакты которого замкнутся с выдержкой времени в 1 сек и подготовят к включению катушку контактора 1У.
В третьем положении «Вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения У, который после замыкания контактов 1РУ выведет ступень сопротивления Р2 и зашунтирует катушку 2РУ.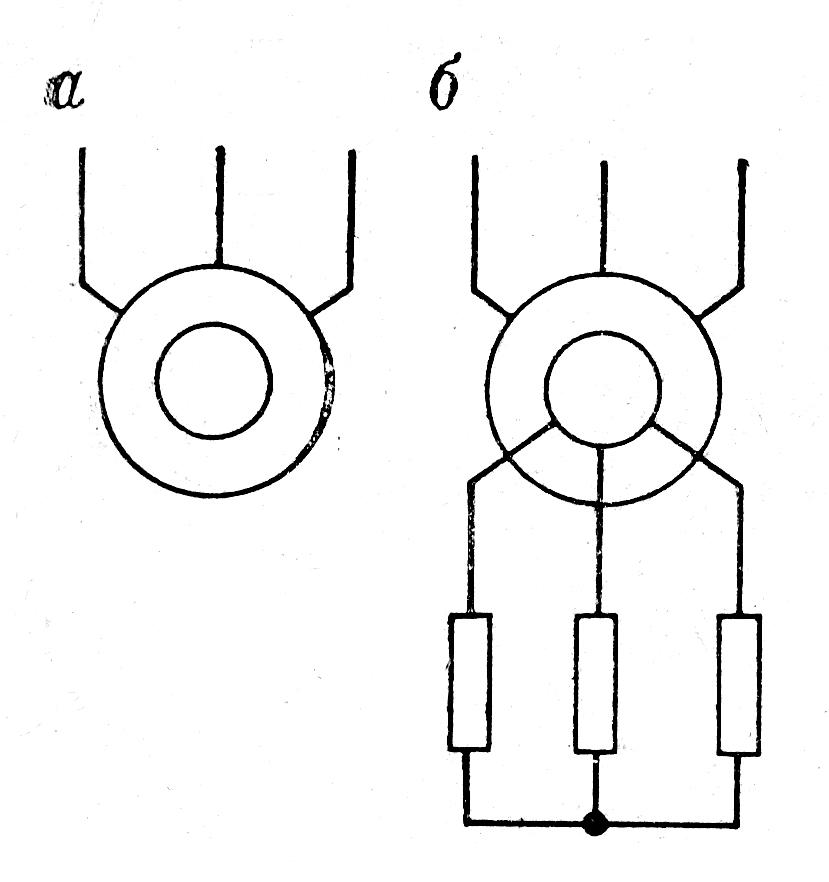
После срабатывания второго реле включится контактор 2У, выключит ступень РЗ сопротивления и зашунтирует катушку ЗРУ. Через замкнувшиеся контакты ЗРУ включится последний контактор ускорения ЗУ и выведет ступень сопротивления Р4. На этом пуск двигателя заканчивается.
Если перевести командоконтроллер сразу на третье положение, контакторы и реле начнут автоматически замыкаться в следующем порядке: 1В и 2В, РВ, П. Затем после выдержки времени 1 сек замкнутся контакты 1РУ и включится 1У. Далее последовательно и автоматически включаются контакты 2РУ и (с выдержкой времени 0,8 сек) 2У, ЗРУ и (с выдержкой времени около 0,5 сек) ЗУ, на чем и заканчивается запуск двигателя.
При необходимости быстрой остановки используется режим противовключения — командоконтроллер переводят в первое положение обратного хода. Двигатель получает питание через контакты контакторов 1Н и 2Н и, продолжая вращаться по инерции в направлении «Вперед», оказывается в режиме противовключения с полностью введенным сопротивлением в цепь якоря Р1-Р5, электродвижущая сила якоря в этом случае почти полностью уравновешивает напряжение сети и реле РН (или реле РВ, если движение происходило в обратном направлении) не сработает вплоть до полной остановки якоря.
Для управления двигателями подъема применяются магнитные контроллеры типа ПС.
Схема контроллера и соответствующая диаграмма замыканий приведена на рис. 134.
Контроллер имеет четыре ступени регулирования при работе двигателя на подъем и четыре при работе на спуск. Схема включения контакторов несимметрична и осуществляет различные режимы работы двигателя при установке рукоятки командоконтроллера в положение подъема или спуска.
Линейный контактор получает питание через контакты КЗ при подъеме и через К4 при спуске груза. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель KB, контакты которого введены в цепь КЗ.
В первом и втором положениях рукоятки командоконтроллера при работе двигателя на подъем главная цепь двигателя шунтируется сопротивлением Р4 посредством нормально закрытого контакта 2Т, что дает возможность получить более глубокое регулирование скорости при подъеме, чем при простом реостатном шунтировании.
При подъеме груза сопротивления Р6 и Р7 шунтируются контактором 2М.
Во втором положении рукоятки командоконтроллера включается контактор 1У, который шунтирует сопротивление Р1 и замыкает цепь катушки реле ускорения РУ, а его контакт подготавливает к включению цепь катушки контактора 2У.
В третьем положении получает питание катушка контактора 2Т, вследствие чего отключается сопротивление Р4, шунтирующее главную цепь двигателя. При установке
рукоятки в четвертое положение последовательно включаются контакторы ускорения 2У и ЗУ.
При быстром переводе рукоятки командоконтроллера в четвертое положение реле ускорения РУ замкнет свой контакт, когда двигатель достигнет 60—70% своей номинальной
Рис. 7. Схема управления с магнитным контроллером типа ПС
скорости. Катушки контакторов 2У и ЗУ получат питание только после того, как замкнется контакт РУ.
Также будет работать реле РУ и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза.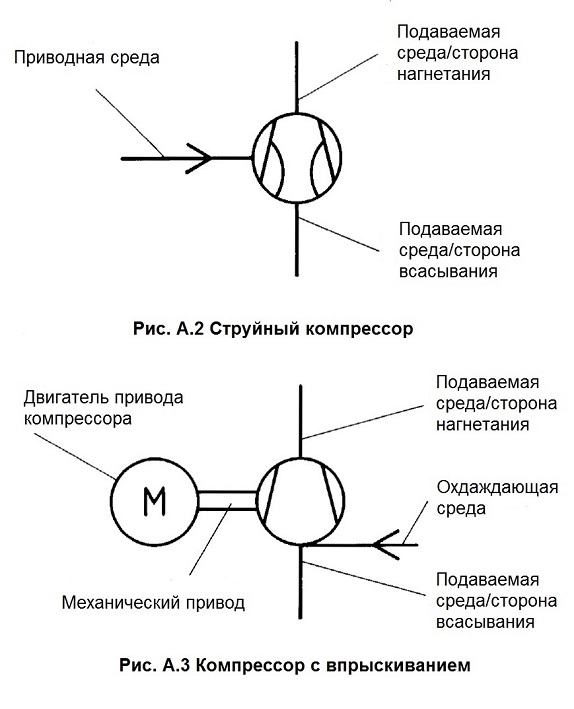
При спуске груза в первом положении командоконтроллера включаются контакторы 1Т и Н. Блокировка катушки контактора Я нормально открытым контактом IT необходима для предотвращения свободного падения груза, так как при отключенном контакте 1Т и включенном Я двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
При включенных контакторах IT и Я якорь двигателя и обмотка возбуждения будут включены параллельно, двигатель будет работать с более жесткой характеристикой, и поэтому скорость опускания груза будет ограничена.
При втором положении командоконтроллера откроется контакт К9, катушки контакторов ускорения 2У и ЗУ будут отключены, в цепь якоря будут введены сопротивления РЗ и Р2.
Увеличение сопротивления в цепи якоря приводит к уменьшению скорости в двигательном и возрастанию ее в генераторном режиме.
В третьем положении откроется контакт К12, отключится катушка контактора 2М, в цепь возбуждения будет введено сопротивление Р7, ток возбуждения машины уменьшится, скорость возрастет.
При переводе командоконтроллера в четвертое положение включатся контакторы ускорения 1У, 2У и ЗУ, которые за-шунтируют сопротивления PI, Р2 и РЗ цепи якоря. Контакт К7 откроется, катушка контактора 1М отключится и в цепь обмотки возбуждения будет введено сопротивление Р6, которое снизит величину тока возбуждения.
Остановка двигателя при спуске может быть сделана постепенным переводом командоконтроллера из четвертого положения в первое.
При необходимости быстрой остановки груза при спуске командоконтроллер сразу переводят в нулевое положение, при этом отключаются катушка контактора Я и реле 2РТ.
Якорь двигателя, его обмотка возбуждения и тормозной электромагнит отключаются от сети и замыкаются контактором 1Т на сопротивления Р2, РЗ, Р5 и Р7, машина будет работать в режиме генераторного торможения с самовозбуждением.
Через 0,4—0,6 сек сработает реле 1РТ, катушка которого шунтируется контактом 1М, и включит контактор 2М, закорачивающий сопротивление Р7.
После этого через 0,7—1,0 сек реле 2РТ откроет свой контакт в цепи контакторов 1T и 2Т.
Якорь двигателя с обмоткой возбуждения теперь будет замкнут на сопротивление Р4 и торможение усилится.
Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
Магнитные контроллеры постоянного тока типа П и ПС рассчитаны только на электродвигатели и тормозные электромагниты последовательного возбуждения. При параллельном или смешанном возбуждении требуется специальное исполнение контроллеров.
Двигатели. Рядный? V-образный? «Оппозит»? — ДРАЙВ
В начале XX века, когда конструкторская мысль бушевала вовсю, двигатель рабочим объёмом 10 л мог быть как одноцилиндровым, так, к примеру, и рядной «восьмёркой». Тогда никого особо не удивляли установленная на автомобиле рядная «шестёрка» объёмом 23 л или семицилиндровый звездообразный мотор с аэроплана.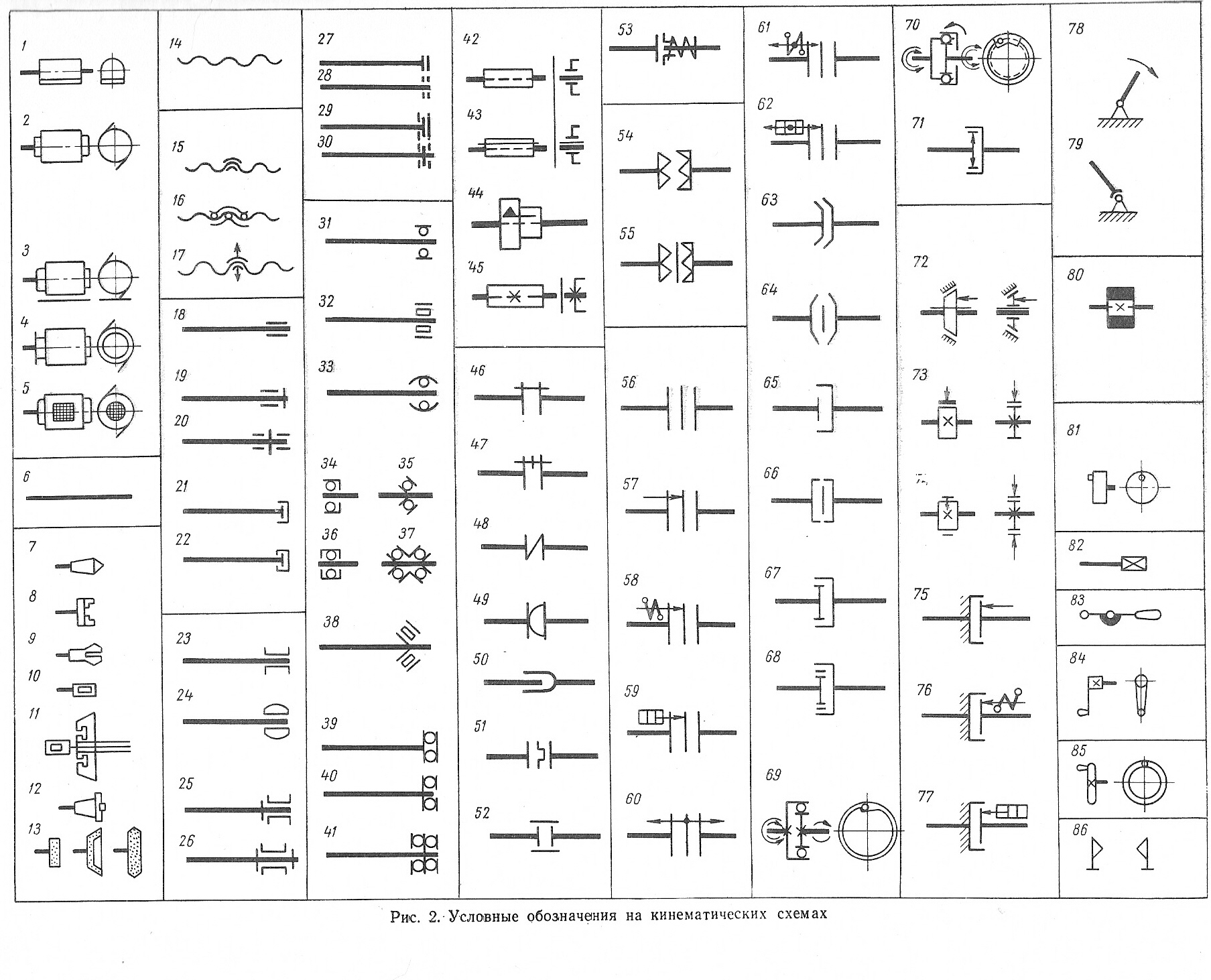 ..
..
Однако рост мощностей, оборотов и ожесточенная борьба за снижение себестоимости всё расставили по местам. Простейший одноцилиндровый мотор для автомобилестроителей остался в далёком прошлом. Средний объём цилиндра двигателя обычного автомобиля сейчас — от трёхсот до шестисот кубических сантиметров. Литровая мощность — от 35 л.с./л для безнаддувного дизеля до 100 л.с./л для форсированного бензинового «атмосферника». Для серийных двигателей это оптимум, выходить за рамки которого просто невыгодно.
Очень маленькие цилиндры часто встречаются на японских микролитражках: например, объём рядной «четвёрки» у Subaru R1 — всего 658 см³. Из «европейцев» отличился трёхцилиндровый дизельный Smart — 799 «кубиков». Есть цилиндры-напёрстки и у «корейцев»: трехцилиндровый Matiz — это 796 «кубиков», а четырёхцилиндровый — 995. «Четвёркой» объёмом 1086 см³ оснащаются Hyundai i10 и Kia Picanto. На другом полюсе — конечно же «американцы». Объём V-образной «восьмёрки» купе Chevrolet Corvette Z06 составляет 7011 см³. Хотя японцы, например, оснащали внедорожник Nissan Patrol предыдущего поколения рядной «шестёркой» TB48DE объёмом 4758 «кубиков».
Хотя японцы, например, оснащали внедорожник Nissan Patrol предыдущего поколения рядной «шестёркой» TB48DE объёмом 4758 «кубиков».
Сегодня двигатель мощностью 100 л.с. в большинстве случаев окажется четырёхцилиндровым, у 200-сильного будет четыре, пять или шесть цилиндров, у 300-сильного — восемь… Но как эти цилиндры расположить? Иными словами — по какой схеме строить многоцилиндровый двигатель?
Простота хуже компактности
О чём болит голова у конструктора? Во-первых, о том, как упростить конструкцию двигателя, чтобы он был дешевле в производстве и легче в обслуживании. Самый простой двигатель — рядный (мы будем обозначать такие моторы индексами R2, R3, R4 и т. д.). Располагаем в ряд нужное количество цилиндров — получаем необходимый рабочий объём.
- Двигатель R3 (А). Угол между кривошипами — 120°.
- Добиться равномерности вспышек в двухцилиндровом двигателе (В) можно только при двухтактном цикле.
- А такой мотор (C), например, стоит на «Оке». Поршни движутся синфазно.
 Поршни движутся синфазно.
Поршни движутся синфазно.Двух- и трёхцилиндровые двигатели встречаются на автомобилях нечасто, хотя мода на «двухгоршковые» моторчики набирает обороты. Тому способствуют продвинутые системы смесеобразования и применение турбонаддува (как, например, на 85-сильной двухцилиндровой турбоверсии хэтчбека Fiat 500). А вот рядная «четвёрка» попала в самый массовый диапазон рабочего объёма легковых автомобилей — от 1,0 до 2,4 л.
В современных четырёхтактных двухцилиндровых двигателях, вроде турбомотора Фиата 500, проблему вибраций отчасти решает балансирный вал.
Пятицилиндровые рядные моторы появились на серийных автомобилях сравнительно недавно — в середине 70-х годов. Первым был Mercedes-Benz со своими дизельными «пятёрками» — они появились в 1974 году (на модели 300D с кузовом W123). Через два года увидел свет пятицилиндровый двухлитровый бензиновый двигатель Audi. А в конце 80-х годов такие моторы сделали Volvo и FIAT.
Рядные «шестёрки», до недавнего времени столь популярные в Европе, нынче во мгновение ока стали вымирающим видом. А про рядную «восьмёрку» и говорить нечего — с ней практически распрощались еще в 30-х годах. Почему?
А про рядную «восьмёрку» и говорить нечего — с ней практически распрощались еще в 30-х годах. Почему?
Ответ прост. С ростом числа цилиндров двигатель становится длиннее, и это создаёт массу неудобств при компоновке. Например, втиснуть поперёк моторного отсека переднеприводного автомобиля рядную «шестёрку» удавалось в считанных случаях — можно припомнить лишь английский Austin Maxi 2200 середины 60-х годов (тогда конструкторам пришлось спрятать коробку передач под двигателем) и Volvo S80 с суперкомпактной коробкой передач.
Два мотора R3, составленные друг за другом, дают великолепный результат — абсолютно уравновешенную рядную «шестёрку».
Как укоротить рядный мотор? Его можно «распилить» пополам, поставить две половинки рядом друг с другом и заставить работать на один коленвал. Такие моторы, у которых цилиндры расположены в виде латинской буквы V, вдвое короче рядных — наибольшее распространение получили двигатели с углом развала блока 60° и 90°.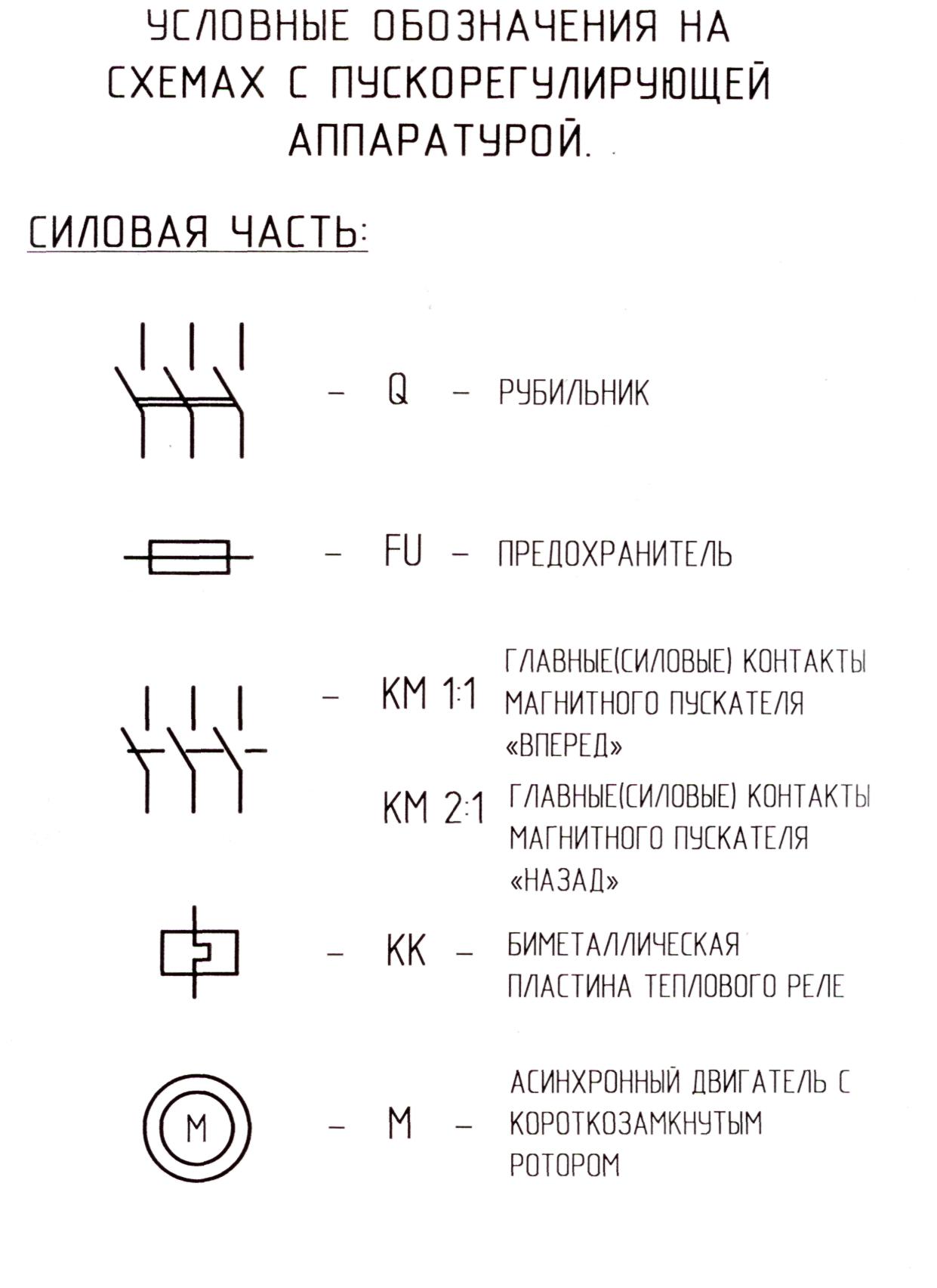 А V-образный мотор с углом развала блока 180°, в котором цилиндры расположены друг против друга, называют оппозитным (или «боксером» — обозначения В2, В4, В6 и т. д. происходят именно от слова boxer).
А V-образный мотор с углом развала блока 180°, в котором цилиндры расположены друг против друга, называют оппозитным (или «боксером» — обозначения В2, В4, В6 и т. д. происходят именно от слова boxer).
Такие моторы сложнее рядных — например, у них две головки цилиндров (каждая со своей прокладкой и коллекторами), больше распредвалов, сложнее схема их привода. А оппозитные двигатели ещё и занимают много места в ширину. Поэтому из компоновочных соображений они применяются довольно редко — производителей «боксеров» можно пересчитать по пальцам.
А как сделать V-образный двигатель еще компактнее? Одно из простых, на первый взгляд, решений — установить угол развала блока менее 60°. Действительно, такие моторы были, но редко — можно вспомнить, например, автомобили Lancia Fulvia 70-х годов с моторами V4, угол развала блока которых составлял 23°. Почему же этим не пользовались все? Дело в том, что перед конструктором двигателя всегда стоит ещё одна проблема — вибрации.
О силах и моментах
Вообще без вибраций поршневой двигатель внутреннего сгорания работать не может — так уж он устроен. Но бороться с ними нужно, и не только для повышения комфорта пассажиров. Сильные неуравновешенные вибрации могут вызвать разрушения деталей мотора — со всеми вылетающими и выпадающими оттуда последствиями…
Отчего возникают вибрации? Во-первых, в некоторых схемах двигателей вспышки в цилиндрах происходят неравномерно. Таких схем конструкторы по возможности избегают или стараются делать массивней маховик — это помогает сгладить пульсации крутящего момента. Во-вторых, при движении поршней вверх-вниз они то разгоняются, то замедляются, из-за чего возникают силы инерции — сродни тем силам, что заставляют пассажиров автомобиля кланяться при торможении или вдавливают их в спинки сидений при разгоне. В-третьих, шатун в двигателе движется вовсе не вверх-вниз, а совершает сложное движение. Да и возвратно-поступательное перемещение поршня от верхней мёртвой точки к нижней тоже нельзя описать простой синусоидой.
- Силы инерции от двух масс, вращающихся на одном валу поодаль друг от друга, создают свободный момент.
- В простейшем моторе есть свободные силы инерции, но нет моментов. Цилиндр-то один.
Поэтому среди сил инерции появляются составляющие с удвоенной, утроенной, учетверённой частотой вращения коленвала… Этими так называемыми силами инерции высших порядков, как правило, пренебрегают — они по сравнению с основной силой инерции (которой присвоили первый порядок) очень малы. Исключение составляют силы инерции второго порядка, с которыми приходится считаться. Плюс к этому, пары сил, приложенные на определённом расстоянии, образуют моменты — так происходит, когда в соседних цилиндрах силы инерции направлены в разные стороны.
Что сделать для того, чтобы уравновесить силы и моменты? Во-первых, можно выбрать схему мотора, в которой цилиндры и кривошипы коленчатого вала расположены таким образом, что силы и моменты взаимно уравновесят друг друга — всегда будут равны и направлены в противоположные стороны.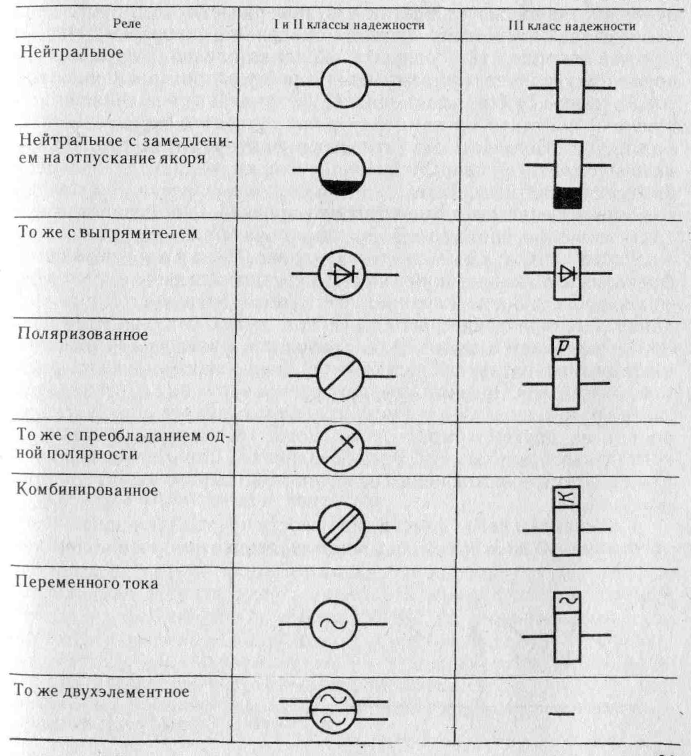
Яркий представитель вымершего племени автомобилей с рядной «восьмёркой» — модель 1930-х годов Alfa Romeo 8C.
А если ни одна из уравновешенных схем не подходит — например, из компоновочных соображений? Тогда можно попытаться по-другому расположить шейки коленвала и применить всякого рода противовесы, создающие силы и моменты, равные по величине, но противоположные по направлению основным уравновешиваемым силам. Иногда это можно сделать, разместив противовесы на коленчатом валу мотора. А иногда — на дополнительных валах, которые называют балансирными валами противовращения. Называются они так потому, что крутятся в другую сторону, нежели коленвал. Но это усложняет и удорожает двигатель.
Чтобы облегчить описание степени уравновешенности разных двигателей, мы подготовили сводную таблицу. Зелёным в ней выделены самоуравновешенные силы и моменты, а красным — свободные (те, что не уравновешены и вырываются на свободу — через опоры силового агрегата проходят на кузов автомобиля).
| Степень уравновешенности (зелёная ячейка — уравновешенные силы или моменты, красная — свободные) | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | R2 | R2* | V2 | B2 | R3 | R4 | V4 | B4 | R5 | VR5 | R6 | V6 | VR6 | B6 | R8 | V8 | B8 | V10 | V12 | B12 | |
| Силы инерции первого порядка | |||||||||||||||||||||
| Силы инерции второго порядка | |||||||||||||||||||||
| Центробежные силы** | |||||||||||||||||||||
| Моменты от сил инерции первого порядка | |||||||||||||||||||||
| Моменты от сил инерции второго порядка | |||||||||||||||||||||
| Моменты от центробежных сил | |||||||||||||||||||||
* Поршни в противофазе.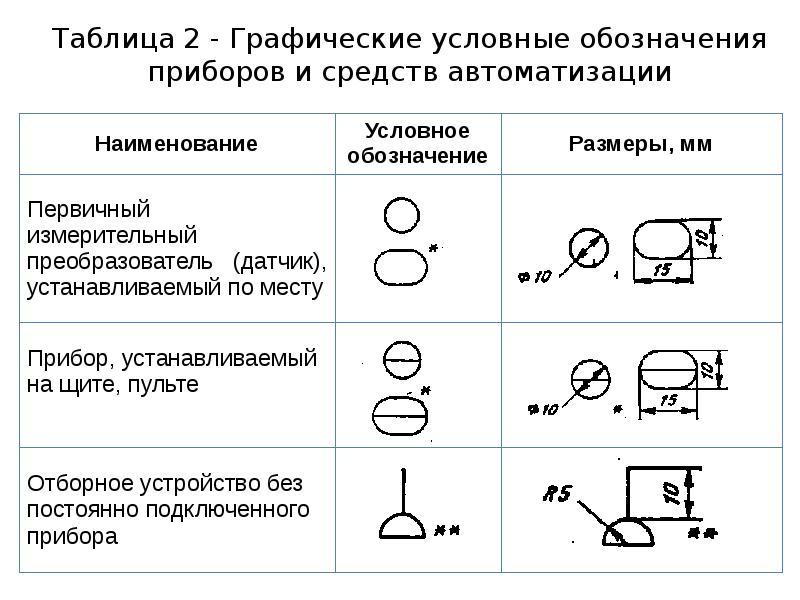
| |||||||||||||||||||||
| ** Уравновешиваются противовесами на коленчатом вале. | |||||||||||||||||||||
Что же получается? Из распространённых типов двигателей абсолютно уравновешенных всего два — это рядная и оппозитная «шестёрки». Теперь понимаете, почему BMW и Porsche так крепко держатся за такие моторы? Ну а о причинах, по которым от них отказываются остальные, мы уже упоминали. Теперь рассмотрим поподробнее остальные схемы.
Шестицилиндровый «оппозитник» водяного охлаждения Porsche. С левой и правой сторон блока в целях экономии стоят одинаковые головки, поэтому цепные приводы распредвалов пришлось устраивать и спереди, и сзади.
Уравновешенные и не очень
Из двухцилиндровых двигателей на автомобилях нынче применяется только один — двухцилиндровый рядный мотор с коленчатым валом, у которого кривошипы направлены в одну сторону (такой, например, стоял на отечественной «Оке»). Как видно, этот двигатель по степени уравновешенности похож на одноцилиндровый, поскольку оба поршня движутся вверх и вниз одновременно, в фазе. Для того чтобы уравновесить свободные силы инерции первого порядка, в моторе «Оки» слева и справа от коленвала применялись два вала с противовесами. А как же быть с силами второго порядка? Для того чтобы с ними справиться, пришлось бы добавить ещё два балансирных вала, что на двухцилиндровом моторе, изначально предназначенном для маленьких и дешёвых автомобилей, было бы совершенно неуместным.
Для того чтобы уравновесить свободные силы инерции первого порядка, в моторе «Оки» слева и справа от коленвала применялись два вала с противовесами. А как же быть с силами второго порядка? Для того чтобы с ними справиться, пришлось бы добавить ещё два балансирных вала, что на двухцилиндровом моторе, изначально предназначенном для маленьких и дешёвых автомобилей, было бы совершенно неуместным.
Впрочем, это ещё ничего — много двухцилиндровых моторов выпускалось вообще без балансирных валов. Так было, например, на малышках Fiat 500 образца 1957 года. Да, вибрации были, их старались погасить подвеской силового агрегата… Но мотор зато получался простым и дешёвым! Дешевизна двухцилиндровых двигателей соблазняет разработчиков и сегодня: не зря же эту схему использовали создатели самого доступного автомобиля планеты, индийского хэтчбека Tata Nano.
Машин с оппозитной «двойкой» — по экономическим и компоновочным соображениям — было немного.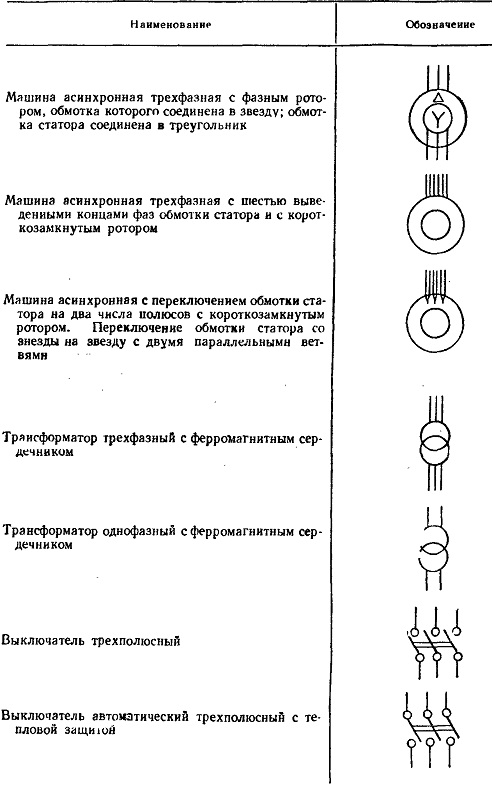 Можно упомянуть, например, французский Citroen 2CV.
Можно упомянуть, например, французский Citroen 2CV.
Двухцилиндровый двигатель, у которого кривошипы направлены в разные стороны (под углом 180°), можно встретить сегодня только на мотоциклах. Поскольку поршни в нём всегда движутся в противофазе, то он уравновешен лучше. Однако равномерного чередования вспышек в цилиндрах можно добиться только на двухтактных моторах — такие двигатели устанавливались на довоенные DKW и их прямых наследников, пластиковые гэдээровские Трабанты. По причине простоты и дешевизны никаких балансирных валов на них тоже не было, а с возникающими вибрациями просто мирились.
Автомобиль с двухцилиндровым V-образным мотором припоминается только один — отечественный НАМИ-1. А до наших дней этот тип двигателя дожил только на мотоциклах — вспомните американский Harley Davidson и его японских последователей с их V-образными «двойками» во всей хромированной красе. Такой мотор можно уравновесить практически полностью с помощью противовесов на коленчатом валу, но достичь равномерного чередования вспышек невозможно.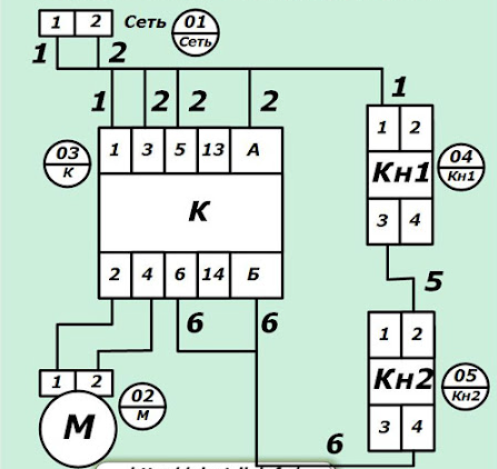 Хорошо, что байкеры особого внимания на вибрации не обращают…
Хорошо, что байкеры особого внимания на вибрации не обращают…
НАМИ-1 — прототип 1927 года.
Трёхцилиндровый двигатель уравновешен хуже, чем рядная «четвёрка», и поэтому производители трёхцилиндровых моторов — например, Subaru и Daihatsu — стараются оснащать их балансирными валами. В своё время опелевские двигателисты решили отказаться от балансирного вала, разрабатывая трёхцилиндровый мотор семейства Ecotec для Корсы второго поколения — в целях удешевления и уменьшения механических потерь. И трёхцилиндровая Corsa после дебюта в 1996-м была раскритикована немецкими автожурналистами: «По городу на переменных режимах ездить совершенно невозможно».
В самой популярной среди двигателистов рядной «четвёрке» остаётся свободной сила инерции второго порядка. Её можно уравновесить только балансирным валом, вращающимся с удвоенной скоростью. (Вы не забыли — сила инерции второго порядка действует с удвоенной частотой?) А для компенсации момента от балансирного вала придётся ставить ещё один, вращающийся в противоположную сторону.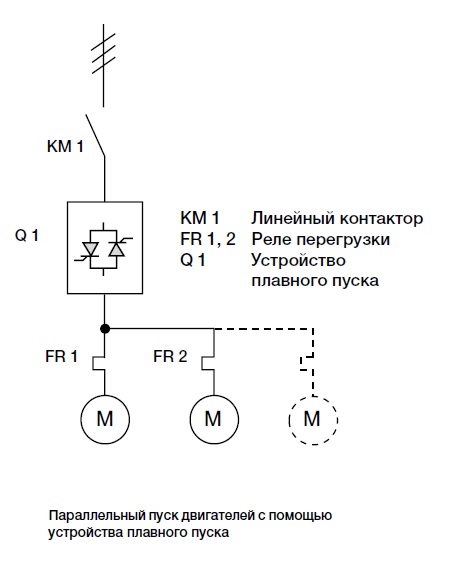 Дорого? Безусловно. Однако моторы с балансирными валами можно встретить на автомобилях Mitsubishi, Saab, Ford, Fiat и самых разных марок концерна Volkswagen.
Дорого? Безусловно. Однако моторы с балансирными валами можно встретить на автомобилях Mitsubishi, Saab, Ford, Fiat и самых разных марок концерна Volkswagen.
Пример рядной «четвёрки» с балансирными валами — двухлитровый двигатель Audi. Валы располагаются по обе стороны от коленвала и с удвоенной скоростью вращаются в противоположные стороны. Здесь балансирные валы расположены снизу и соединены зубчатой передачей, а раньше (как, например, на приведённом на картинке внизу двигателе Saab 2.3) их располагали сверху и у каждого был свой шкив цепного привода.
Кстати, оппозитная «четвёрка» уравновешена лучше, чем рядная, — здесь есть только момент от сил инерции второго порядка, который стремится развернуть двигатель вокруг вертикальной оси. Однако и «оппозитник» воздушного охлаждения легендарного «Жука», и знаменитые «боксеры» Subaru обходились и обходятся без балансирных валов.
Subaru из компоновочных соображений предпочитает рядной «четвёрке» оппозитную. Что до вибраций, то силы инерции второго порядка у «боксера» уравновешены, но момент от них всё же остаётся свободным.
Что до вибраций, то силы инерции второго порядка у «боксера» уравновешены, но момент от них всё же остаётся свободным.
У рядных «пятёрок» с уравновешенностью дела обстоят не очень. Силы инерции компенсируются, но вот моменты от этих сил… Во время работы двигателя по блоку постоянно «пробегает» волна изгибающего момента, поэтому блок должен быть весьма жёстким. Однако и Mercedes-Benz, и Audi, и Volvo борются с вибрациями, дорабатывая подвеску силового агрегата или применяя специальные противовесы (как у наддувной «пятёрки» 2.5 TFSI на Audi TT RS). И только фиатовские мотористы применяли балансирный вал, который полностью уравновешивал все моменты.
- На картинке FIAT JTD от хэтчбека Croma — потомок пятицилиндрового турбодизеля Fiat TD 125 объёмом 2387 см³, образованного путём добавления одного цилиндра к 1,9-литровой «четвёрке» TD 100. Балансирный вал — слева, в нижней части картера.
- Под каким углом расположить кривошипы коленвала рядной «пятёрки»? 360° делим на пять. .. Правильно — 72°!
 .. Правильно — 72°!
.. Правильно — 72°!Кстати, практически все «пятёрки» образованы путём прибавления ещё одного цилиндра к четырёхцилиндровому двигателю — как кубики в конструкторе. Делают это для того, чтобы с минимальными производственными и конструкторскими затратами получить более мощные моторы. При этом всю начинку, включая поршни, шатуны, клапаны и т. д., можно взять от «четвёрки». Понадобятся иные блок и головка цилиндров и, само собой, коленчатый вал, кривошипы которого должны быть расположены под углом в 72°.
О шестицилиндровых моторах — мечте с точки зрения уравновешенности — мы уже упоминали. А вот в моторах V6, которые вытесняют рядные «шестёрки», ситуация с уравновешенностью такая же, как у «трёшки», то есть не ахти. Поэтому, например, балансирным валом в развале блока цилиндров был оснащён самый первый двигатель V6 фирмы Mercedes-Benz — заслуженный М112 с тремя клапанами на цилиндр. У трёхлитровой «шестёрки» концерна PSA вал находился в одной из головок блока. На других моторах того времени инженеры пытались не усложнять конструкцию и старались свести уровень вибраций к минимуму за счёт усовершенствованной подвески силового агрегата и хитроумного смещённого расположения шатунных шеек коленчатого вала (как, например, на Audi V6).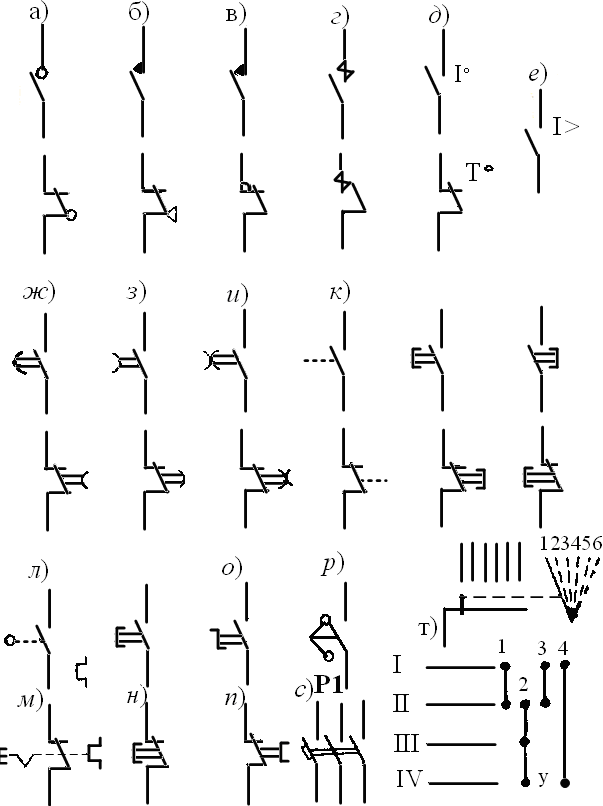
- В моторе V6 с углом развала блока 90° сдвоенные кривошипы расположены под углом 120°. А в моторах с развалом 60° каждый шатун приходится устанавливать на своём кривошипе.
- Для уравновешивания свободного момента от сил второго порядка мотору V6 90° необходим один балансирный вал (показан стрелкой). В двигателе Citroen 3.0 V6 он был установлен в одной из головок блока.
У новейших мерседесовских двигателей V6 угол развала блока сократился до 60°, в результате чего необходимость в балансирном вале отпала.
Добавим сюда ещё одно замечание — в моторах V6 с развалом в 90° не обеспечивается равномерное чередование вспышек в цилиндрах. Возникающая неравномерность хода может компенсироваться за счёт утяжелённого маховика, но лишь отчасти. Вот вам и ещё один источник вибраций…
Двигатели V8 с углом развала цилиндров в 90° и коленвалом, кривошипы которых располагаются в двух взаимно перпендикулярных плоскостях, весьма неплохо уравновешены. В таком моторе можно обеспечить равномерное чередование вспышек, что тоже работает на плавность хода. Остаются неуравновешенными два момента, которые можно полностью утихомирить с помощью двух противовесов на коленчатом валу — на щеках крайних цилиндров. Понимаете, почему американцы раньше других прочувствовали всю прелесть V-образных моторов? Вибрации и тряски в своих автомобилях они очень не любят…
В таком моторе можно обеспечить равномерное чередование вспышек, что тоже работает на плавность хода. Остаются неуравновешенными два момента, которые можно полностью утихомирить с помощью двух противовесов на коленчатом валу — на щеках крайних цилиндров. Понимаете, почему американцы раньше других прочувствовали всю прелесть V-образных моторов? Вибрации и тряски в своих автомобилях они очень не любят…
Двигатель V8: и развал блока, и угол между кривошипами — 90°.
Напоследок можно поговорить о схемах необычных. Сначала вспомнить о моторах V4. Таких было немного — европейский Ford образца 60-х годов (который стоял на автомобилях Ford Taunus, Capri и Saab 96) да чудо-двигатель отечественного «Запорожца». Здесь не обошлось без уравновешивающего вала для момента от сил инерции первого порядка. Впрочем, конструкторы вышеупомянутых автомобилей выбирали эту схему из условий компактности и отчасти экономии, а не за хорошую уравновешенность.
- Ford и ЗАЗ выбрали экзотику: мотор V4, в котором и угол развала блока, и угол между кривошипами составляют 90°.
- Угол развала цилиндров моторов V2 колеблется от 25° до 90°.

А что насчёт V-образных «десяток»? Как можно видеть, степень уравновешенности таких моторов точно такая же, как и у моторов R5. Впрочем, конструкторы прежних моторов Формулы-1 или монстров Dodge Viper и Dodge RAM, где стоят двигатели V10, о вибрациях думали далеко не в первую очередь.
Как жаль, что Viper и его коллосальный V10 — уже история.
Двигателями V10 отметилась целая череда знаковых машин: BMW M5, Audi S6 и S8, а также RS6 с наддувной «десяткой». Не говоря уже об автомобилях Lamborghini. Наконец, Lexus LFA тоже оснащается двигателем V10.
Ну а прочие схемы легко свести к предыдущим. Например, оппозитная «восьмёрка» (пример применения — гоночные болиды Porsche 917) — это две «четвёрки», работающие на один коленвал. А V-образный и оппозитный двенадцатицилиндровые двигатели можно свести к двум рядным «шестёркам».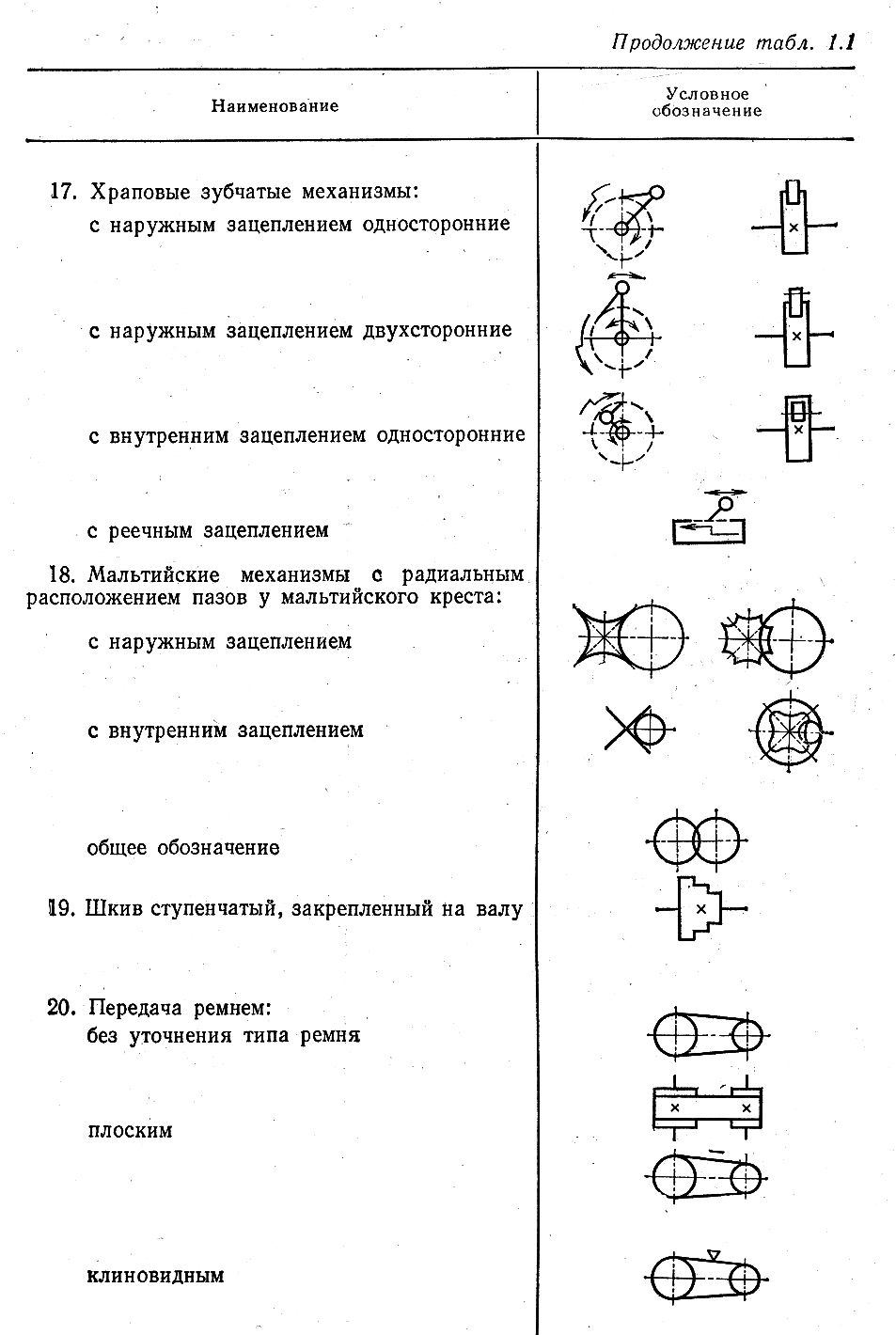
VR6, VR5, W12…
Помните, мы упоминали о V-образных моторах с малым углом развала блока — как на Лянчах? Раньше таких схем избегали — уравновесить их сложнее, чем моторы с развалом в 60° или 90°, а выигрыш в компактности тогда ценили не так…
Но теперь ситуация изменилась. Во-первых, повсеместно применяются гидроопоры силового агрегата, которые значительно ослабляют вибрации. Во-вторых, пространство под капотом нынче на вес золота. Ведь кто раньше мог себе представить скромный хэтчбек с 2,8-литровым мотором? А теперь — пожалуйста! Всё началось с Фольксвагена Golf VR6 третьего поколения.
Знаменитый фольксвагеновский двигатель VR6, «V-образно-рядный» мотор (об этом и говорит обозначение VR), стал дальнейшим развитием V-образных двигателей с малым углом развала блока. Цилиндры этого мотора разведены на ещё меньший угол, чем на Лянчах, — всего на 15°. Угол настолько мал, что такой мотор называют ещё «смещённо-рядным». Гениальное решение — «шестёрка» 2. 8 компактнее, чем обычный мотор V6, да ещё и имеет одну головку блока! Потом появился двигатель VR5 — это VR6, от которого «отрезали» один цилиндр. После этого мотористы концерна Volkswagen вообще словно с цепи сорвались.
8 компактнее, чем обычный мотор V6, да ещё и имеет одну головку блока! Потом появился двигатель VR5 — это VR6, от которого «отрезали» один цилиндр. После этого мотористы концерна Volkswagen вообще словно с цепи сорвались.
Двигатель VR5 2.3 конструкторы Фольксвагена получили, отняв один цилиндр от мотора VR6. Угол развала компактного блока — 15°, все пять цилиндров укрыты одной головкой блока.
Они придумали суперкомпактный двигатель W12, который дебютировал в 1998 году на концепт-каре W12 Roadster. Это два двигателя VR6, установленные под углом 72° на одном коленвале. Но прежде в серию пошёл мотор W8, которым оснащалась топ-модель седана Passat. Там тоже два мотора VR6, от которых «отрезано» по два цилиндра и которые тоже объединены в одном блоке на одном коленвале. Когда-то в Вольфсбурге подумывали и о восемнадцатицилиндровом двигателе — но в итоге остановились на W16 с четырьмя турбокомпрессорами, который разгоняет Bugatti Veyron до 431 км/ч.
Супермотор W12, показанный на концепте имени себя, приводит в движение представительские модели фирм Audi, Volkswagen и Bentley. На фото хорошо видно шахматное расположение цилиндров пары блоков, объединённых в одной отливке под углом 72°. Длина 420-сильного мотора — всего 51 см, ширина — 70 см.
Почему же таких моторов не было раньше? Взгляните, к примеру, на коленвал двигателя W12 — такое технологу и в страшном сне не приснится! Создателям новых схем должен помогать компьютер. Чтобы просчитать все варианты угла развала блока, расположения шатунных шеек, порядка вспышек в цилиндрах и выбрать самый уравновешенный, без помощи вычислительных мощностей обойтись очень сложно.
Теория и практика
Как видно, при выборе схемы силового агрегата конструкторы ставят во главу угла вовсе не степень уравновешенности. Главное — это удачно вписать в моторный отсек такой двигатель, который будет обладать наилучшим соотношением массы, размеров и мощности.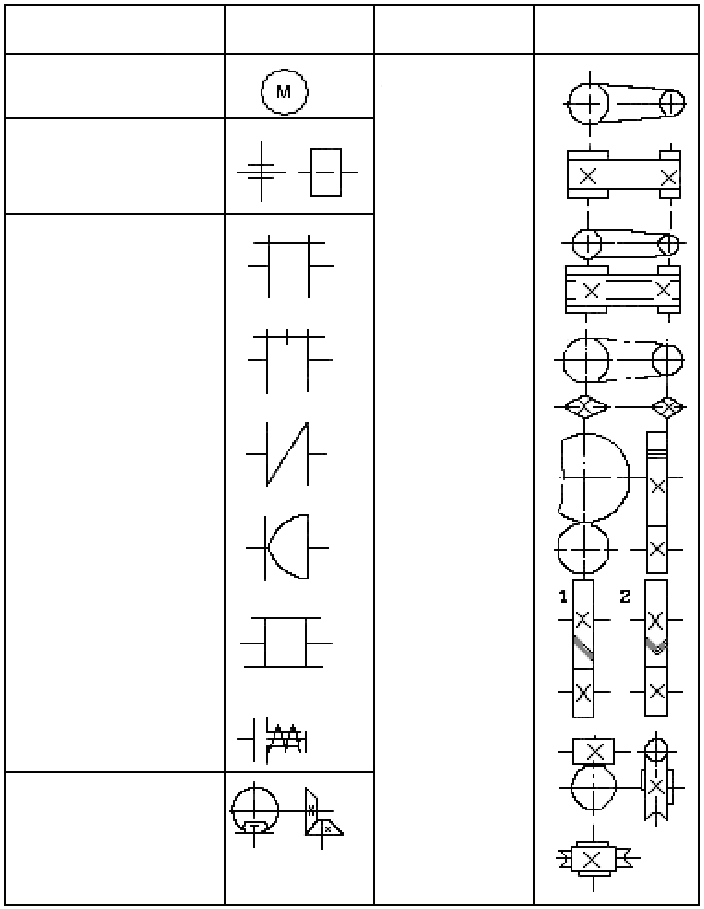 Потом, двигатели сейчас всё чаще строятся по модульному принципу. Говоря упрощённо, на одной поршневой группе можно построить любой мотор — и трёхцилиндровый, и W12. Вслед за Фольксвагеном на модульные конструкции переходит всё больше производителей. Новейшая линейка моторов Mercedes — тому отличное подтверждение.
Потом, двигатели сейчас всё чаще строятся по модульному принципу. Говоря упрощённо, на одной поршневой группе можно построить любой мотор — и трёхцилиндровый, и W12. Вслед за Фольксвагеном на модульные конструкции переходит всё больше производителей. Новейшая линейка моторов Mercedes — тому отличное подтверждение.
А вибрации… Во-первых, следует различать теоретическую и действительную уравновешенность двигателя. Если коленчатый вал в сборе с маховиком не отбалансирован, а поршни и шатуны заметно отличаются по массе, то трясти будет даже рядную «шестёрку». А потом, действительная уравновешенность всегда значительно хуже теоретической — по причинам отклонения деталей от номинальных размеров и из-за деформации узлов под нагрузкой. Так что вибрации «прорываются» из двигателя наружу при любой схеме. Поэтому автомобильные инженеры и уделяют такое внимание подвеске силового агрегата. На самом деле конструкция и расположение опор двигателя — не менее важный фактор, чем степень уравновешенности самого мотора.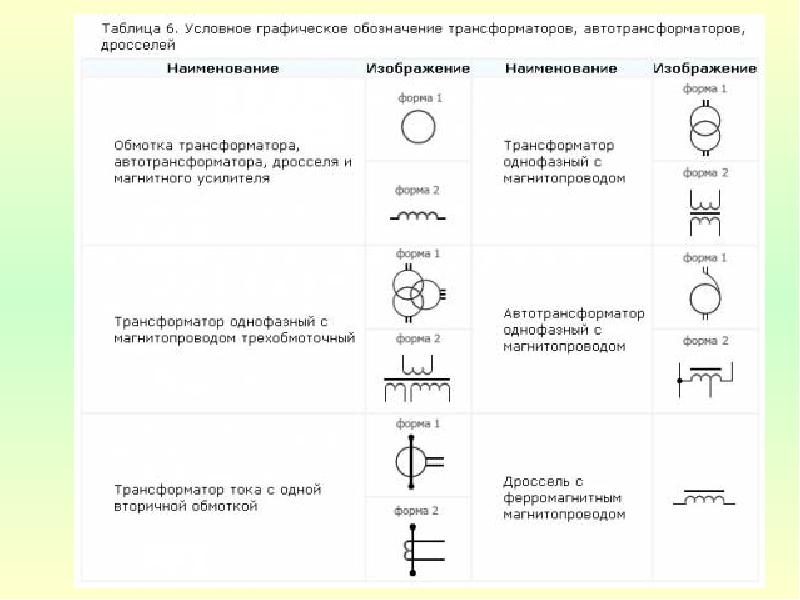 ..
..
Материал адаптирован к публикации с разрешения ООО «Газета «Авторевю». Все права на перепечатку принадлежат Авторевю.
30 Основные части автомобильного двигателя со схемой
Основные части автомобильного двигателя
Автомобильный двигатель представляет собой сложный механизм, состоящий из множества внутренних частей, которые работают как часы, создавая мощность, приводящую в движение ваш автомобиль. Все детали должны быть в хорошем состоянии для правильной работы двигателя.
Двигатель — это сердце вашего автомобиля. Это сложная машина, созданная для преобразования тепла горящего газа в силу, вращающую опорные катки.
Состоит из двух основных частей: нижняя, более тяжелая часть — блок цилиндров, кожух основных движущихся частей двигателя; съемная верхняя крышка — головка блока цилиндров.
Чтобы выдерживать большие нагрузки, двигатель должен иметь прочную конструкцию. Двигатель приводится в движение искрой, которая воспламеняет смесь паров бензина и сжатого воздуха внутри мгновенно закрытого цилиндра и вызывает его быстрое сгорание.
Именно поэтому машина называется двигателем внутреннего сгорания. Когда смесь горит, она расширяется, обеспечивая мощность для движения автомобиля.
Головка блока цилиндров содержит каналы с клапанным управлением, через которые топливно-воздушная смесь поступает в цилиндры, и другие каналы, через которые выбрасываются газы, образующиеся при их сгорании.
В блоке находится коленчатый вал, преобразующий возвратно-поступательное движение поршней во вращательное движение коленчатого вала. Часто в блоке также находится распределительный вал, который приводит в действие механизмы, открывающие и закрывающие клапаны в головке блока цилиндров. Иногда распределительный вал находится в головке или установлен над ней.
ДОПОЛНИТЕЛЬНО: Как работает автомобильный двигатель?
Детали автомобильного двигателя Схема
Несмотря на то, что двигатель состоит из нескольких компонентов, мы составили список наиболее важных деталей автомобильного двигателя и их функций, обеспечивающих работу вашего автомобиля. Обратитесь к схеме, чтобы определить, где они находятся на вашем двигателе.
Обратитесь к схеме, чтобы определить, где они находятся на вашем двигателе.
Запчасти двигателя
Список частей двигателя автомобиля:
- PIN-код галочки
- Cam
- Cam
- Малачики
- головной прокладки
- Crank Liner
- Crank
- дистрибьютор
- дистрибьютор o кольцо
- цилиндров крышка
- Резиновая втулка
- Шкив распредвала
- Масляный фильтр
- Водяной насос
- Шкив привода ГРМ
- Сливной болт масляного поддона
Большинство современных автомобилей имеют от четырех до восьми цилиндров, хотя в некоторых автомобилях их может быть до шестнадцати!
Цилиндры открываются и закрываются точно в нужное время для подачи топлива в сочетании с искрой для внутреннего сгорания и выпуска выхлопных газов.
Хотя многие из нас думают о двигателе как об одном основном компоненте, на самом деле он состоит из нескольких отдельных компонентов, работающих одновременно.
Возможно, вы слышали названия некоторых из этих деталей автомобильных двигателей, но важно знать, какова их роль и как они соотносятся с другими компонентами двигателя.
1. Блок двигателя
Блок двигателя является основной частью двигателя . Часто изготавливается из алюминия или железа , он имеет несколько отверстий для размещения цилиндров, а также обеспечивает пути потока воды и масла для охлаждения и смазки двигателя. Масляные пути уже, чем пути потока воды.
Блок цилиндров также содержит поршни, коленчатый вал, распределительный вал и от четырех до двенадцати цилиндров, в зависимости от автомобиля, в линию, также известную как рядную, плоскую или V-образную.
Все остальные части двигателя крепятся к нему болтами. Внутри блока происходит волшебство, например, горение.
ПОДРОБНЕЕ: Что такое блок двигателя?
2. Поршень
Представляют собой цилиндрический аппарат с плоской поверхностью сверху. Роль поршня заключается в передаче энергии, создаваемой при сгорании, коленчатому валу для приведения в движение автомобиля . Поршни перемещаются вверх и вниз внутри цилиндра дважды при каждом вращении коленчатого вала.
Роль поршня заключается в передаче энергии, создаваемой при сгорании, коленчатому валу для приведения в движение автомобиля . Поршни перемещаются вверх и вниз внутри цилиндра дважды при каждом вращении коленчатого вала.
Поршни двигателей, которые вращаются со скоростью 1250 об/мин, будут перемещаться вверх и вниз 2500 раз в минуту. Внутри поршня лежат поршневые кольца, которые помогают создавать компрессию и уменьшают трение от постоянного трения цилиндра.
ДОПОЛНИТЕЛЬНО: Что такое поршень?
3. Головка цилиндра
Крепится к двигателю болтами цилиндра, уплотняется прокладкой головки.
Головка блока цилиндров содержит множество элементов, включая пружины клапанов, клапаны, толкатели, толкатели, коромысла и распределительные валы для управления проходами, которые обеспечивают подачу всасываемого воздуха в цилиндры во время такта впуска.
А также выхлопные каналы, удаляющие выхлопные газы во время такта выпуска.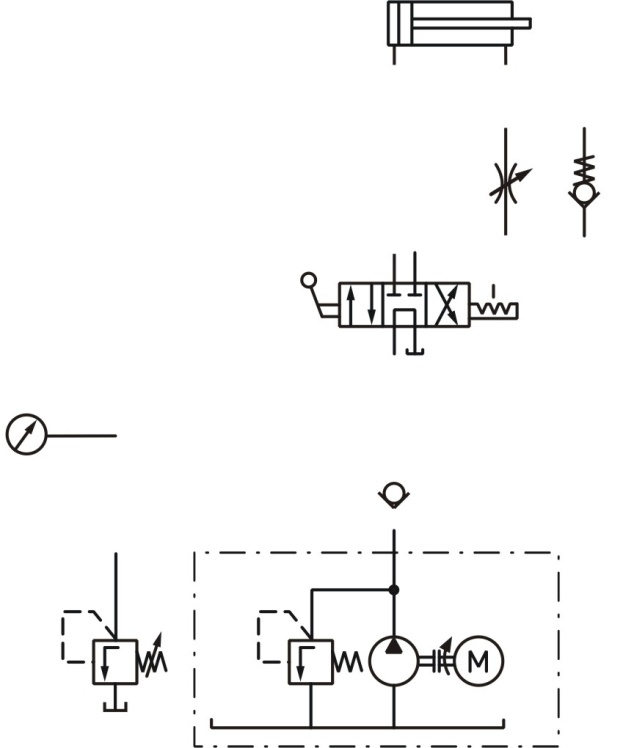
ДОПОЛНИТЕЛЬНО: Что такое головка блока цилиндров?
4. Коленчатый вал
Коленчатый вал расположен в нижней части блока цилиндров, в шейках коленчатого вала (область вала, которая опирается на подшипники).
Этот тщательно обработанный и сбалансированный механизм соединяется с поршнями через шатун.
Подобно тому, как работает домкрат из коробки, коленчатый вал вращает поршни вверх и вниз в возвратно-поступательном движении со скоростью двигателя.
ПОДРОБНЕЕ: Что такое коленчатый вал?
5. Распределительный вал
В зависимости от автомобиля распределительный вал может быть расположен либо в блоке цилиндров, либо в головках цилиндров.
Многие современные автомобили имеют их в головках цилиндров, также известные как двойной верхний распределительный вал (DOHC) или одинарный верхний распределительный вал (SOHC), и поддерживаются последовательностью подшипников, которые смазываются маслом для увеличения срока службы.
Роль распределительного вала заключается в регулировании момента открытия и закрытия клапанов, получении вращательного движения от коленчатого вала и передаче его движениям вверх и вниз для управления движением толкателей, толкателей, коромыслов, и клапаны.
ЕЩЕ : Что такое распределительный вал?
6. Ремень/цепь ГРМ
Ремень ГРМ, цепь ГРМ или ГРМ — это часть двигателя, которая синхронизирует вращение коленчатого и распределительного валов таким образом, что клапаны двигателя открываются и закрываются в нужное время во время тактов впуска и выпуска каждого цилиндра.
В двигателе с интерференцией ремень или цепь ГРМ также важны для предотвращения удара поршня о клапаны. Ремень ГРМ обычно представляет собой зубчатый ремень, приводной ремень с зубьями на внутренней поверхности.Цепь ГРМ представляет собой роликовую цепь.
Ремень изготовлен из сверхпрочной резины с шестернями для захвата шкивов распределительного и коленчатого валов.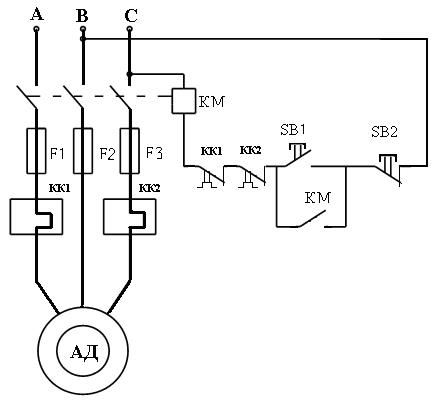 Цепь, как и ваша велосипедная цепь, наматывается на шкивы с зубьями.
Цепь, как и ваша велосипедная цепь, наматывается на шкивы с зубьями.
ДОПОЛНИТЕЛЬНО: Что такое ремень ГРМ?
7. Клапаны двигателя
Клапаны двигателя представляют собой механические компоненты, используемые в двигателях для регулирования потоков воздуха, топлива и выхлопных газов в камерах сгорания или головке цилиндров во время работы двигателя.
Работа клапана очень проста: кулачок толкает клапаны вниз в цилиндр против пружины, открывая клапан, чтобы газы могли течь, а затем позволяя клапану закрыться под действием пружины.
Давление в камере сгорания довольно аккуратно помогает закрыть клапан.
ДОПОЛНИТЕЛЬНО: Что такое клапан двигателя?
8. Масляный поддон
Масляный поддон является важной, хотя и простой частью системы смазки вашего двигателя . Масло циркулирует по частям вашего двигателя, чтобы поддерживать их смазку. Это уменьшает трение, поэтому все работает гладко.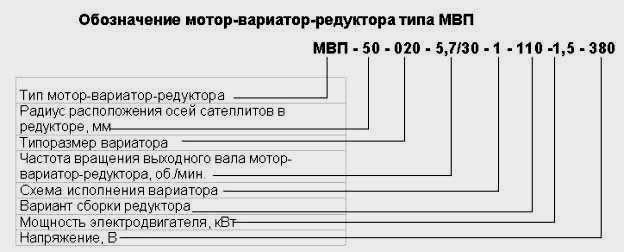 Без масла трение быстро разрушит ваш двигатель.
Без масла трение быстро разрушит ваш двигатель.
Масляный поддон удерживает масло, содержащееся в системе смазки, поэтому важно, чтобы масло не вытекало.Поскольку это металлическая деталь, прикрепленная к другой металлической детали, между масляным поддоном и той частью двигателя, к которой он прикреплен, имеется прокладка.
9.
Камера сгорания
Камера сгорания — это область внутри цилиндра, где воспламеняется топливно-воздушная смесь . Когда поршень сжимает топливно-воздушную смесь и вступает в контакт со свечой зажигания, смесь сгорает и выталкивается из камеры сгорания в виде энергии.
Цилиндр содержит многие важные компоненты двигателя внутреннего сгорания, включая форсунку, поршень, свечу зажигания, камеру сгорания и другие.
ДОПОЛНИТЕЛЬНО: Что такое камера сгорания?
10.
Впускной коллектор ld
Впускной коллектор в автомобиле — это часть двигателя, которая распределяет поток воздуха между цилиндрами . Часто впускной коллектор удерживает дроссельную заслонку (корпус дроссельной заслонки) и некоторые другие компоненты.
Часто впускной коллектор удерживает дроссельную заслонку (корпус дроссельной заслонки) и некоторые другие компоненты.
В некоторых двигателях V6 и V8 впускной коллектор может состоять из нескольких отдельных секций или частей.
Всасываемый воздух проходит через воздушный фильтр, впускной патрубок (шноркель), затем через корпус дроссельной заслонки в камеру впускного коллектора, затем через направляющие и в цилиндры.Дроссельный клапан (корпус) регулирует обороты двигателя, регулируя объем воздушного потока.
ПОДРОБНЕЕ: Что такое впускной коллектор?
11.
Выпускной коллектор
Выпускной коллектор, как правило, представляет собой простые узлы из чугуна или нержавеющей стали, которые собирают выхлопные газы двигателя из нескольких цилиндров и подают их в выхлопную трубу . Он соединен с выпускными клапанами. Его конструкция аналогична впускному коллектору.
Выпускной коллектор выполняет одинаковую функцию как в бензиновых, так и в дизельных двигателях, в обоих случаях он отводит выхлопные газы.
ПОДРОБНЕЕ: Что такое выпускной коллектор?
12.
Впускные и выпускные клапаны
Впускные и выпускные клапаны используются для контроля и регулирования подачи (или воздуха) заряда (или воздуха), поступающего в двигатель для горения, и выхлопных газов, выходящих из цилиндра соответственно.
Они предусмотрены либо на головках цилиндров, либо на стенках цилиндров. Обычно они имеют грибовидную головку.
В бензиновых двигателях смесь воздуха и топлива поступает через впускной клапан.А вот в дизелях через впускной клапан поступает только воздух. Выпускной клапан в обоих случаях предназначен для выпуска выхлопных газов.
Впускные клапаны соединены с впускным коллектором, а выпускные клапаны соединены с выпускным коллектором. Как впускной, так и выпускной коллекторы обсуждались выше.
13.
Свеча зажигания
Свеча зажигания представляет собой устройство для подачи электрического тока от системы зажигания в камеру сгорания двигателя с искровым зажиганием для воспламенения сжатой топливно-воздушной смеси электрической искрой при сдерживании давления сгорания внутри двигателя.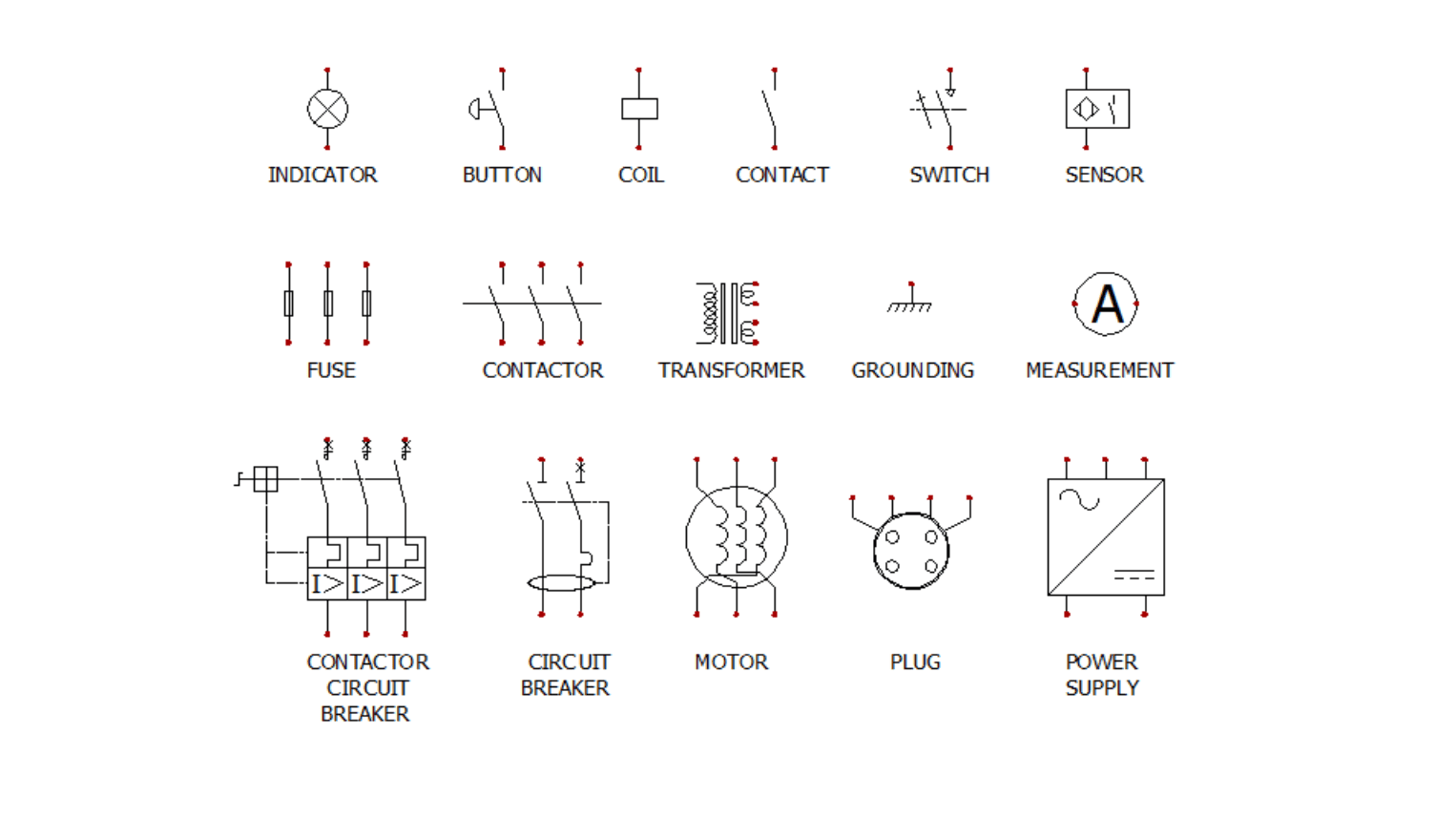
Свеча зажигания имеет металлический корпус с резьбой, электрически изолированный от центрального электрода керамическим изолятором.
Центральный электрод, который может содержать резистор, соединяется сильноизолированным проводом с выходной клеммой катушки зажигания или магнето.
ПОДРОБНЕЕ: Что такое свеча зажигания?
14.
Шатун
Шатун — это часть поршневого двигателя, которая соединяет поршень с коленчатым валом .Шатун вместе с кривошипом преобразует возвратно-поступательное движение поршня во вращение коленчатого вала.
Шатун необходим для передачи сжимающих и растягивающих усилий от поршня. В наиболее распространенной форме в двигателе внутреннего сгорания он позволяет поворачиваться на конце поршня и вращаться на конце вала.
Предшественником шатуна является механическое соединение, используемое водяными мельницами для преобразования вращательного движения водяного колеса в возвратно-поступательное движение.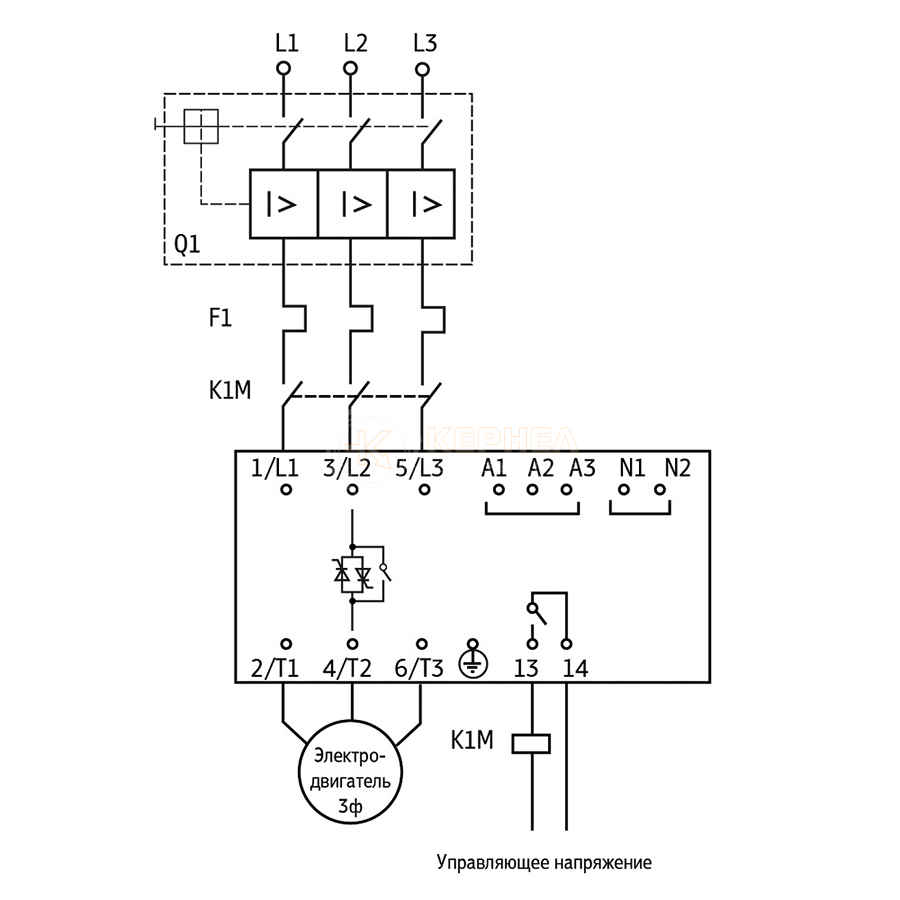
ДОПОЛНИТЕЛЬНО: Что такое шатун?
15.
Поршневое кольцо
Поршневое кольцо представляет собой металлическое разрезное кольцо, которое крепится к наружному диаметру поршня в двигателе внутреннего сгорания или паровом двигателе.
Основными функциями поршневых колец в двигателях являются:
- Герметизация камеры сгорания для минимальных потерь газов в картер.
- Улучшение теплопередачи от поршня к стенке цилиндра.
- Поддержание надлежащего количества масла между поршнем и стенкой цилиндра
- Регулирование расхода моторного масла путем соскребания масла со стенок цилиндра обратно в поддон.
Большинство поршневых колец изготавливаются из чугуна или стали.
ДОПОЛНИТЕЛЬНО: Что такое поршневое кольцо?
16. Поршневой палец
Поршневой палец, также известный как поршневой палец, является важным компонентом двигателя внутреннего сгорания.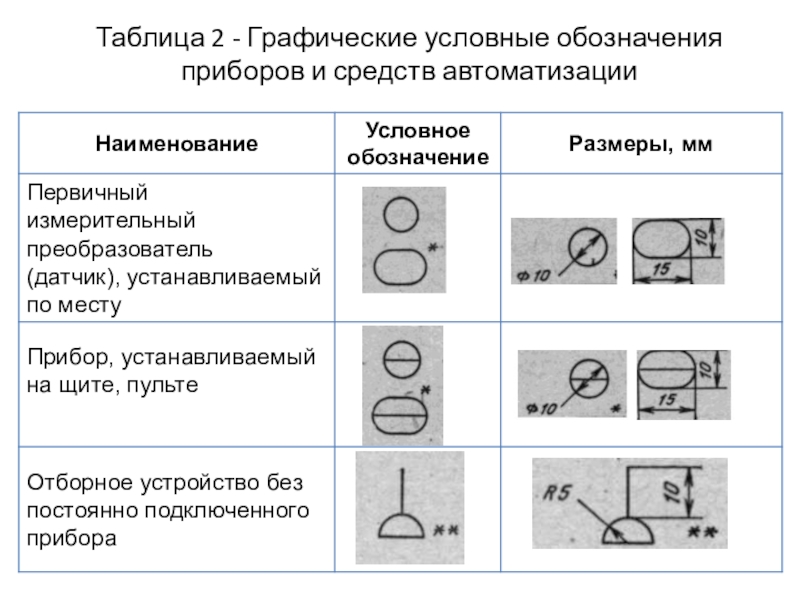
Создает соединение между шатуном и поршнем .Поршневые пальцы также можно использовать с шатунами и колесами или кривошипами.
17. Кулачок
Являются неотъемлемой частью распределительных валов. Из-за кулачков распределительный вал известен как распределительный вал. Кулачки установлены на распределительном валу для управления фазами впускных и выпускных клапанов .
Теперь речь пойдет о самой важной детали двигателя автомобиля.
ДОПОЛНИТЕЛЬНО: Что такое кулачок и типы кулачков?
18. Маховик
Маховик представляет собой механическое устройство, использующее закон сохранения углового момента для накопления энергии вращения; форма кинетической энергии , пропорциональная произведению момента инерции на квадрат скорости вращения.
Крутящий момент, обеспечиваемый двигателем, неоднороден и носит колебательный характер. Если транспортное средство продолжает двигаться с этой колеблющейся мощностью. Это доставит огромный дискомфорт водителю, а также уменьшит срок службы различных его частей.
Это доставит огромный дискомфорт водителю, а также уменьшит срок службы различных его частей.
Следовательно, для решения проблемы неустойчивой нагрузки используется маховик. Маховик обычно устанавливается на распределительный вал. Он сохраняет крутящий момент, когда его значение высокое, и освобождает его, когда его значение низкое в рабочем цикле. Он действует как буфер крутящего момента.
ДОПОЛНИТЕЛЬНО: Что такое маховик?
19. Прокладка
Прокладка представляет собой кольцо или лист из эластичного материала, используемого в статических условиях для герметизации соединений, фланцев и других сопрягаемых поверхностей для предотвращения утечек.
В двигателях обычно используются прокладки различных типов:
- Прокладка головки блока цилиндров: Прокладка головки блока цилиндров обеспечивает уплотнение между блоком цилиндров и головкой блока цилиндров . Его цель состоит в том, чтобы герметизировать продукты сгорания внутри цилиндров и предотвратить утечку охлаждающей жидкости или моторного масла в цилиндры. Негерметичность прокладки головки блока цилиндров может привести к плохой работе двигателя и/или его перегреву.
- Прокладка впускного коллектора: Прокладка впускного коллектора закрывает небольшой зазор между коллектором и двигателем, предотвращая утечку воздуха, охлаждающей жидкости и масла . Со временем прокладка впускного коллектора подвергается сильному износу. В конце концов, он может треснуть или деформироваться, что приведет к протечкам.
- Прокладка выпускного коллектора: Прокладка выпускного коллектора обычно представляет собой многослойную прокладку, содержащую металл и другие материалы, предназначенные для обеспечения наилучшего уплотнения.Поскольку прокладка выпускного коллектора является первой в выхлопной системе, это очень важное уплотнение, которое следует проверять в случае возникновения каких-либо проблем.
- Прокладка водяного насоса : Прокладка водяного насоса представляет собой кольцеобразную деталь, изготовленную из прочного материала, способного выдерживать различные температуры. Водяной насос является одним из основных компонентов, который проталкивает охлаждающую жидкость вокруг двигателя, поэтому между ним и блоком цилиндров может возникнуть утечка, если он не имеет подходящей прокладки водяного насоса, обеспечивающей его герметичность.
- Прокладка масляного поддона : Сама прокладка масляного поддона герметизирует масляный поддон к нижней части блока цилиндров и предотвращает утечку масла при его перемещении из поддона в двигатель и обратно. Однако, поскольку масло течет постоянно, ни одно транспортное средство не защищено от утечек масла. Часто утечка масла связана с масляным поддоном или изношенной прокладкой масляного поддона.
 Негерметичность прокладки головки блока цилиндров может привести к плохой работе двигателя и/или его перегреву.
Негерметичность прокладки головки блока цилиндров может привести к плохой работе двигателя и/или его перегреву. Водяной насос является одним из основных компонентов, который проталкивает охлаждающую жидкость вокруг двигателя, поэтому между ним и блоком цилиндров может возникнуть утечка, если он не имеет подходящей прокладки водяного насоса, обеспечивающей его герметичность.
Водяной насос является одним из основных компонентов, который проталкивает охлаждающую жидкость вокруг двигателя, поэтому между ним и блоком цилиндров может возникнуть утечка, если он не имеет подходящей прокладки водяного насоса, обеспечивающей его герметичность.ДОПОЛНИТЕЛЬНО: Что такое прокладка головки блока цилиндров?
20. Гильза цилиндра
Гильза цилиндра представляет собой тонкую металлическую деталь в форме цилиндра, которая вставляется в блок цилиндров и образует цилиндр .Это одна из наиболее важных функциональных частей, составляющих внутреннюю часть двигателя.![]()
Гильза цилиндра, служащая внутренней стенкой цилиндра, образует поверхность скольжения для поршневых колец, удерживая внутри смазку.
Во время эксплуатации гильза цилиндра подвергается износу из-за трения поршневых колец и юбки поршня. Этот износ минимизируется тонкой масляной пленкой, покрывающей стенки цилиндров, а также слоем глазури, который естественным образом образуется при обкатке двигателя.
21. Картер картера
Картер представляет собой корпус для коленчатого вала поршневого двигателя внутреннего сгорания. В большинстве современных двигателей картер встроен в блок цилиндров.
В двухтактных двигателях обычно используется схема сжатия картера, в результате чего топливно-воздушная смесь проходит через картер перед поступлением в цилиндр(ы). Эта конструкция двигателя не предусматривает масляного поддона в картере.
Четырехтактные двигатели обычно имеют масляный поддон в нижней части картера, и большая часть моторного масла удерживается внутри картера.
Топливно-воздушная смесь не проходит через картер в четырехтактном двигателе, однако небольшое количество выхлопных газов часто попадает в виде «прорыва» из камеры сгорания.
Картер часто образует нижнюю половину шеек коренных подшипников (с крышками подшипников, образующими другую половину), хотя в некоторых двигателях картер полностью окружает шейки коренных подшипников.
22. Распределитель двигателя
Распределитель представляет собой закрытый вращающийся вал, используемый в двигателях внутреннего сгорания с искровым зажиганием, которые имеют механическую синхронизацию зажигания.
Основной функцией распределителя является направление вторичного или высоковольтного тока от катушки зажигания к свечам зажигания в правильном порядке зажигания, и в течение правильного периода времени.
За исключением систем магнето и многих современных двигателей с компьютерным управлением, в которых используются датчики угла поворота/положения коленчатого вала, в распределителе также имеется механический или индуктивный выключатель для размыкания и замыкания первичной цепи катушки зажигания.
23. Уплотнительное кольцо распределителя
Распределители обычно используют уплотнительное кольцо специального размера, которое надевается на вал распределителя для уплотнения его с двигателем, называемое уплотнительным кольцом распределителя.
Уплотнительное кольцо распределителя просто герметизирует корпус распределителя с двигателем, чтобы предотвратить утечку масла в основании распределителя. Когда уплотнительное кольцо выходит из строя, это может привести к утечке масла из основания распределителя, что может привести к другим проблемам.
24. Крышка головки блока цилиндров
На многих современных четырехтактных двигателях в крышке головки блока цилиндров находятся верхние исполнительные элементы блока управления двигателем, а также клапаны вентиляции картера со всеми его периферийными устройствами.
Дополнительно защищает двигатель от грязи и других посторонних предметов .
25. Резиновая втулка
Резиновые втулки используются для защиты или закрытия отверстий и уменьшения вибрации . Вставка резиновой втулки поможет устранить острые края и предохранит клапан двигателя от прохождения через отверстие. Резиновая втулка поможет защитить клапан от повреждений.
26. Шкив распределительного вала
Шкив распределительного вала является частью системы газораспределения в двигателе , используемой для управления скоростью вращения распределительного вала, компонента, который управляет тарельчатыми клапанами , отвечающими за впуск и выпуск воздуха в цилиндрах.
Кулачковый шкив сочленяется с цепью привода ГРМ для синхронного вращения распределительного вала с коленчатым валом.
27. Масляный фильтр
Масляный фильтр вашего автомобиля также удаляет отходы . Он захватывает вредный мусор, грязь и металлические фрагменты в моторном масле, обеспечивая бесперебойную работу двигателя вашего автомобиля.
Без масляного фильтра вредные частицы могут попасть в моторное масло и повредить двигатель. Фильтрация мусора означает, что ваше моторное масло дольше остается чистым.
ДОПОЛНИТЕЛЬНО: Что такое фильтр двигателя и его типы?
28. Шкив привода зубчатого ремня
Шкив зубчатого ремня представляет собой специальную систему шкивов с зубьями или выемками по внешнему диаметру корпуса шкива.
Зубья или выемки на внешней стороне шкива не используются для передачи мощности. Скорее, они задействуют ремень шкива, помогая синхронизировать и предотвращая несоосность.
29. Водяной насос
Водяной насос автомобиля представляет собой насос с ременным приводом, который получает мощность от коленчатого вала двигателя.Водяной насос, выполненный в виде центрифуги, всасывает охлажденную жидкость из радиатора через центральный вход насоса.
Затем жидкость циркулирует наружу в двигатель и обратно в систему охлаждения автомобиля.
ПОДРОБНЕЕ: Что такое автомобильный водяной насос?
30. Сливной болт масляного поддона
Пробка слива масла обычно расположена в нижней части двигателя на масляном поддоне. Он используется для слива масла из поддона во время замены масла . Если вы заметили утечку на масляной пробке, в некоторых случаях это может быть просто замена прокладки.
Если болт или масляный поддон имеют поперечную резьбу, вам может понадобиться новая пробка для слива масла. В некоторых случаях пробка для слива масла увеличенного размера нарежет новую резьбу, что поможет вам избежать замены всего масляного поддона.
Общие проблемы с двигателем
При таком количестве механизмов, выполняющих множество задач с молниеносной скоростью, со временем детали могут начать изнашиваться, что приведет к изменению поведения автомобиля. Вот наиболее распространенные проблемы с двигателем и связанные с ними симптомы:
- Плохая компрессия — приводит к потере мощности, пропуску зажигания или невозможности запуска.
- Треснувший блок двигателя — вызывает перегрев, дым из выхлопных газов или утечки охлаждающей жидкости, обычно обнаруживаемые сбоку двигателя.
- Поврежденные поршни, кольца и/или цилиндры – Слышны дребезжащие звуки, синий дым из выхлопной трубы, неровный холостой ход или непройденный тест на выбросы.
- Сломанные или изношенные шатуны, подшипники и штифты — вызывают постукивание или тиканье, низкое давление масла, наличие металлической стружки в моторном масле или дребезжание при ускорении.
Автомобильные двигатели могут показаться сложными, но их задача проста: двигать ваш автомобиль вперед. Поскольку так много компонентов работают вместе, чтобы создать это движение, крайне важно, чтобы ваш автомобиль получал надлежащее техническое обслуживание, чтобы обеспечить его долговечность.
Регулярная плановая замена масла, промывка жидкости и замена ремней и шлангов в рекомендуемое время — отличный способ предотвратить досадное обстоятельство отказа двигателя.
Ещё: 51 Базовые проблемы с двигателем и как его исправить
Автомобильные запчасти двигателя видео
Read также
Летающие модели ракет — относительно
безопасно
и недорогой способ для студентов
изучить основы силы и
Реакция транспортных средств на внешние воздействия.Как и самолет, модель ракеты
подвергается
силы веса,
тяга и аэродинамика
во время его
полет.
Вес и аэродинамика определяются конструкцией.
Компоненты модели ракеты.
Тяга обеспечивается сменным
твердотопливный ракетный двигатель
которые можно купить в местных магазинах хобби или игрушек.
Характеристики модели ракеты (
как далеко,
как высоко,
как быстро) сильно зависит
сделка по ракете
производительность двигателя.Существует несколько различных способов
характеризуют характеристики ракетного двигателя. Модели ракетных двигателей бывают разных
размеров и веса, с разным количеством топлива, с
различные модели горения, которые влияют на профиль тяги, и с
различные значения времени задержки.
В верхней части страницы мы показываем типичные кривые производительности для нескольких различных
ракетные двигатели. Мы строим зависимость тяги от времени .
после зажигания для каждого двигателя сплошными линиями.Вы заметите, что при сравнении
двигателей, существует большая разница между уровнями и формами
участки. Для любого отдельного двигателя тяга изменяется со временем.
Мы можем указать усредненную по времени тягу двигателя по формуле
суммирование произведения тяги за некоторое небольшое время приращения времени
количество приращения времени, а затем деление на общее время.
Результат этого усреднения показан на графике штриховыми линиями.
При покупке моделей ракетных двигателей вы заметите этикетку на каждом двигателе.
в формате; буквенный номер — номер .На рисунке мы показываем C6-4.
Первое число указывает среднюю тягу в ньютонах.
C6-4 имеет среднюю тягу 6 ньютонов. Средняя тяга, умноженная на
время работы двигателя называется
суммарный импульс
двигателя.
Буква дает максимальный суммарный импульс этого
класс двигателя. Двигатель «А» имеет максимальный импульс 2,5 ньютон-секунды,
«1/2A» имеет 1,25 Н-сек, «B» имеет 5,0 Н-сек, «C»
имеет 10,0 Н-сек, а «D» — 20.0 Н-сек. Если сравнить кривые для B6 и
у С6 мы находим, что оба двигателя имеют одинаковую среднюю тягу (6 ньютонов),
но двигатель «С» горит почти в два раза дольше при удвоенном общем импульсе.
Второе число указывает продолжительность времени задержки в
секунды.
C6-4 имеет время задержки 4 секунды между выключением двигателя и выстрелом.
выбрасывающего заряда.
Время задержки определяет продолжительность
каботажный этап полета.
Если время задержки слишком мало по отношению к оптимальному выбегу аппарата, парашют
разворачивается на пути вверх и останавливает полет.Если время задержки слишком велико, автомобиль
может упасть на землю до раскрытия парашюта.
Конструктор двигателя может влиять на тягу и общее
импульс двигателя за счет изменения диаметра рабочего тела (и корпуса).
Типичные двигатели «1/2A» имеют диаметр 13 мм, типичные двигатели «A», «B» и «C».
имеют диаметр 18 мм, а типичные двигатели «D» имеют диаметр 24 мм. Это
важно помнить, потому что модель ракеты, разработанная для двигателя «В», будет
не принимайте «1/2A» или «D».Двигатели не влезут в
фиксированная опора двигателя
ракеты.
Экскурсии с гидом
Модель ракеты:
Деятельность:
Связанные сайты:
Rocket Index
Rocket Home
Руководство для новичков Home
Бета-двигатели Стирлинга — обновлено 30.12.2011
Бета-двигатели Стирлинга — обновлено 30.12.2011
Глава 2b — Двигатели Стирлинга бета-типа
Конфигурация Beta представляет собой классический двигатель Стирлинга.
конфигурации и пользовался популярностью с момента своего создания до
сегодня.Оригинальный двигатель Стирлинга по его патентному чертежу 1816 г.
показывает бета-аранжировку. Фотография Роберта Стерлинга,
оригинальный патентный рисунок, а также анимированная модель Стирлинга
двигатель хорошо показан на интересном сайте Robert
Сер . Из рисунка ниже мы видим, что
в отличие от машины «Альфа», двигатель «Бета» имеет один силовой поршень
и вытеснитель, идеальная цель которого — «вытеснить»
рабочего газа при постоянном объеме и перемещать его между расширительными
и пространства сжатия через охладитель последовательного расположения,
регенератор и обогреватель.В реальных двигателях рычажный механизм, приводящий в движение
поршень и вытеснитель переместят их так, что газ сожмется
в то время как он находится в основном в прохладном пространстве сжатия и расширяется в то время как в
пространство горячего расширения. Это хорошо видно на соседнем
анимация, созданная Ричардом Уилером ( Zephyris )
Википедия .
|
|
Подробное описание идеальной бета-машины
цикл представлен в Engineering
Термодинамика — Глава 3b веб-ресурс.См. также анимацию машины Beta от Matt.
Кевени — Одноместный
Цилиндр двигателя Стирлинга , ясно показывает
принцип работы.
Помимо оригинального двигателя Стирлинга, важным
ранний бета-двигатель — это машина Леманна, на которой Густав
Шмидт сделал первый разумный анализ
двигателей Стирлинга в 1871 году. Энди Росс построил небольшую рабочую копию
Lehmann
машина , а также модель
воздушный двигатель , оба одноцилиндровые
Бета-конфигурации.
Рольф Мейер из Philips, Голландия, разработал свой
знаменитыйnvibrationless ромбический
водить двигатели Beta в начале 1960-х. В
1965 г. Исследовательская лаборатория General Motors разработала ромбический привод мощностью 7,5 кВт.
Двигатель/генератор Стирлинга ГПА-3 (наземная энергоустановка) для США
Армия. Он описан и проанализирован в книге И.Уриели и
Д. М. Берховиц — Анализ двигателя с циклом Стирлинга (Адам Хилгер,
1984), стр. 30–40, а так как эта книга больше не издается, эти
здесь для удобства добавлены страницы: Rhombic-GPU-3.pdf .
Энди Росс построил несколько небольших воздушных двигателей с ромбическим приводом — см.
его книга: Изготовление
Двигатели Стирлинга (Экспериментальный Росс,
1993).
Еще один интересный сайт — Stirling.
Лодки с двигателем от Эндрю
Зал , описывающий лодки, приводимые в основном
Двигатели типа Beta, построенные моделистами в Соединенном Королевстве.
Свободнопоршневые двигатели Стирлинга
Вероятно, самые изобретательные двигатели Стирлинга.
изобретены свободнопоршневые двигатели, изобретенные и разработанные Уильямом
Бил в Университете Огайо в конце
1960-е годы.Легенда гласит, что во время обучения ромбическому приводу
двигатель, он вдруг понял, что «этот двигатель будет работать, если
мы просто выбрасываем это
сложный приводной механизм — Эврика!». Затем он создал компанию
Санпауэр ,
которая была лидером в разработке свободнопоршневых двигателей Stirling.
двигателей и криокулеров по сей день.
Большинство двигателей Sunpower являются бета-версиями и
не используют механическую систему связи. Главный аспект бесплатного
поршневой машине заключается в том, что выходная мощность может быть получена за счет
линейный генератор переменного тока, что позволяет всей системе быть герметичным
запечатанный.По сути, это единственная конфигурация Стирлинга, которой удалось достичь.
коммерциализация в любых количествах. Это в основном потому, что он избегает
фатальные недостатки кривошипа, снова и снова доказываемые годами
быть почти непреодолимым — уплотнение и смазка.
С
1974 Солнечная сила
разработал свободнопоршневые двигатели/генераторы Стирлинга.
мощностью от 35 Вт e до 7,5 кВт e .
Рассмотрим, например, двигатель/генератор EG-1000, работающий на газе.
и был разработан для производства электроэнергии (1 кВт e )
а также для обеспечения горячей водой частного дома.Рабочий газ
используется гелий, который имеет то преимущество, что имеет низкую молекулярную
вес и высокая теплопроводность по сравнению с воздухом, что позволяет
значительное уменьшение размеров. Этот двигатель показан на рисунке
ниже вместе с упрощенной схематической диаграммой.
|
Линейный электрический генератор (на чертеже не показан) Горячая вода обеспечивается за счет работы |
Солнечная сила
Свободнопоршневой двигатель/генератор Стирлинга ЭГ-1000
| На этой фотографии мы видим Солнечную силу. |
Обратите внимание, что с 1995 г.
Технология EG-1000 использовалась компанией British Gas для разработки ТЭЦ (комбинированной
Heat and Power) – двигатель/генератор мощностью 1 кВт в настоящее время
производитель Microgen
Engine Corporation (см.
к их истории
и Двигатель
интернет страницы).
Ан
чрезвычайно интересная система двигателя со свободным поршнем, разработанная Уильямом
Beale — это свободный цилиндр
водяной насос . В этом двигателе тяжелый
внутренняя масса обеспечивает силу реакции, приводящую в движение цилиндр, который
непосредственно подключен к водяному насосу. Это встроенная сила
регулировка и реагирует на нагрузку автоматически. Все остальные двигатели
для этого требуется трансмиссия и сложные механизмы управления.
Кроме того, я не знаю другой механической тепловой машины.
который работает от бесконечной нагрузки до нуля без остановки или
разрушая себя.
Еще одна привлекательная функция бесплатного
цилиндровой системы заключается в том, что она может быть изготовлена из недорогих
легкодоступные компоненты. Фактически, весь корпус насоса может быть
изготавливаются из обычных труб и арматуры из ПВХ. Надежность,
простота и низкая стоимость этого двигателя делают его в высшей степени подходящим
для применения в развивающихся странах, а в 1970-х гг.
тщательно протестированы как в полевых условиях, так и в лаборатории (см.
презентация 1979 года Уильяма Била A
Двигатель Стирлинга со свободным цилиндром для водяных насосов на солнечной энергии ).
Два интересных свободных поршневых двигателя Стирлинга
также были исследованы холодильные установки – дуплексный газовый
холодильник с огнем, имеющий только три движущихся части, один силовой поршень
и два поршня вытеснителя (см. статью L.B.Penswick &
И.Уриэли – Дуплекс
Машины Стирлинга (I. Преобразование энергии
Инженерная конференция, 1984 г.), и газовый свободнопоршневой CO2.
система охлаждения (см. статью
Д.М.Берховиц и Йонг-Рак Кван – Герметик
Газовый жилой тепловой насос ).
Sunpower также участвовала в производстве
Криогенные охладители цикла Стирлинга для сжижения кислорода. Над
лет Sunpower превратила Афины, штат Огайо, в очаг Стирлинга.
деятельность машинного цикла, которая теперь включает в себя три НИОКР/производство
компании. В 2013 году Sunpower была приобретена компанией AMETEK,
Inc в Пенсильвании, однако продолжается
занимается разработкой машины с циклом Стирлинга в Афинах, штат Огайо. Глава 3
книги И.Уриэли и Д.М.Берховица – Двигатель с циклом Стирлинга
Анализ (Адам Хилгер, 1984) полностью посвящен анализу
Свободнопоршневые машины, и, поскольку эта книга больше не издается,
Глава добавлена сюда в четырех частях для удобства:
Свободный поршень(1).пдф ,
Свободный поршень(2).pdf ,
Свободный поршень(3).pdf ,
Свободный поршень(4).pdf .
См. также статью Р.В.Редлиха и Д.М.Берховица –
Линейный
динамика свободнопоршневых двигателей Стирлинга (ИмечЭ
1985), а также к конспектам лекций по инженерии Г. Уокера и
Дж. Р. Сенфт — Бесплатно
Поршневые двигатели Стирлинга (Springer-Verlag
1985, в настоящее время доступна в виде электронной книги).
Интересно
документ, описывающий хронологию разработки Free Piston
Технологию двигателя Стирлинга представил Дэвид.
Берховиц в
Международная конференция по двигателям Стирлинга 2018 г. (см.: A
Личная история в разработке современного двигателя Стирлинга ).
НАСА
Исследовательский центр Гленна был вовлечен
в разработке свободнопоршневых двигателей Стирлинга для полетов в дальний космос
с середины 1970-х гг. Один из их подопытных
юниты недавно установили рекорд времени выполнения
более 110 000 часов, постоянно работая на полной мощности с тех пор, как
2003, и до сих пор работает без каких-либо признаков ухудшения производительности.
Совсем недавно они сосредоточились на Kilopower.
Реактор с использованием технологии Стирлинга (KRUSTY) для
мощностью до 10 кВт – см. также National
Управление ядерной безопасности и их
ютуб
видео .
Стерлинг
Технология (обратите внимание на недавнее название компании
изменение: Комбинированная энергия
Technology ) — дочерняя компания Sunpower.
и изначально формировался для того, чтобы продолжить развитие и
изготовление 3,5 кВт СТ-5
Воздушный двигатель . Этот большой двигатель типа Beta
использует кривошипно-шатунный механизм для получения правильной фазировки буйка,
сжигает топливо из биомассы (например, гранулы из опилок или рисовую шелуху) и может
работает как когенерационная установка в сельской местности.
В настоящее время
Stirling Technology работает с Microgen
Двигательная корпорация , международная
компания, производящая свободнопоршневой двигатель/генератор MEC мощностью 1 кВт.Компания Stirling Technology разработала многотопливную горелку для двигателя.
и сотрудничает с Microgen для внедрения различных систем в
рынок.
Общее охлаждение
(В настоящее время
Стерлинг
Ultracold ) был побочным продуктом
Sunpower и была основана в 1995 году
Дэвид
Berchowitz в основном для разработки
Свободнопоршневые охладители цикла Стирлинга для домашнего холодильника
Приложения. Эти системы, помимо того, что они значительно
эффективнее обычных парокомпрессионных холодильников, имеют
дополнительное преимущество компактных портативных устройств, использующих гелий в качестве
рабочая жидкость (а не хладагенты ГФУ, такие как R134a, имеющие
Потенциал глобального потепления 1300).Схематическая диаграмма, за которой следует
анимированная схема типичного кулера (оба любезно предоставлены Global
Охлаждение) показаны ниже:
В
Университет Огайо у нас есть демонстрация Global Cooling Stirling
Кулер показан ниже. Обычно она достигает -90°C, однако, поскольку
ледяной шар покрывает всю секцию регенератора, мы замечаем, что
температура поднялась до -43°С.
Совсем недавно Global Cooling решила сконцентрироваться
их усилия по разработке систем, в которых практически нет
конкурентные системы — охлаждение от -40°C до -80°C, и они
учредила новое название компании: Stirling
Ультрахолодный .
Обновить
— 2021: Стерлинг
Ультранизкая температура Ultracold (ULT)
Морозильники отвечают сегодняшним беспрецедентным задачам развертывания COVID-19.
Обратитесь к Walgreens
Пример вакцины против COVID-19 , а также
Стерлинг
Ultracold объединяется с Biolife Solutions .
____________________________________________________________________________________
Анализ машины цикла Стирлинга
, проведенный Израилем
Уриэли находится под лицензией Creative
Commons Attribution-Noncommercial-Share Alike 3.0 США
Лицензия
Объяснение кодов двигателей LS
Итак, вы хотите LS, вам НУЖЕН LS. ЛС — любовь; ЛС это жизнь! Но когда приходит время загрузить инструменты в грузовик и отправиться на кладбище, внезапно возникает вопрос: «Какой двигатель LS мне подходит? И что означают все эти коды?»
Что такое коды двигателей LS и почему они важны?
Термин «LS» происходит от кода RPO, данного им GM. «RPO означает вариант обычного производства и является стандартной кодировкой General Motors для вариантов конфигурации автомобиля», — объясняет New GM Parts, специализированный оптовый дистрибьютор оригинальных запасных частей и аксессуаров GM OEM.«Каждый код RPO представляет собой комбинацию трех буквенно-цифровых символов (например, Z71), которая относится к определенной опции или модификации автомобиля, созданного во время производства. Коды RPO идентифицируют базовую модель автомобиля, а также такие параметры, как цвет краски, двигатель, информационно-развлекательная система, колеса и т. д.»
Однако, когда дело доходит до кодов двигателей LS, в массах существуют некоторые разногласия. Двигатели LS построены на малоблочной платформе и поэтому имеют много общих характеристик с двигателями Gen 2, Gen 3 и Gen 4 в этой категории.Проблема? Многие люди будут свободно определять двигатели, отличные от LS, как двигатели LS.
Это обычно исходит от тех, кто использует малые блоки более раннего поколения или двигатели, полученные от грузовиков, и просто называет их LS, чтобы свести к минимуму путаницу. Просто проще сказать «О да, это LS», чем сказать: «Ну, это много , как LS, но есть некоторые отличия…»
Таким образом, несмотря на то, что семейство двигателей LS ограничено автомобилями с обозначениями LS1, LS3, LS6 и т. д., эта снисходительность втискивает широкий спектр двигателей и кодов в царство семейства LS.Знание и понимание того, что означают эти коды и чем они отличаются, поможет вам определить, какой двигатель LS вы ищете, пока вы будете просеивать сокровища на свалке, экономя время и деньги.
Какой у меня двигатель LS?
Чтобы выяснить, на какой двигатель LS вы смотрите, просто сверьтесь с кодом RPO. Самый простой способ сделать это — найти VIN и сослаться на 8-ю цифру. Приведенные ниже таблицы помогут вам идентифицировать двигатель.
Источник: Преобразование PSI Источник: Преобразование PSI
Какие коды LS мне нужны
?
В зависимости от того, с кем вы разговариваете, этот ответ будет разным.Достаточно сказать, что есть много отличных двигателей LS, но бюджет и рыночный спрос действительно будут определять, что вы можете получить. Важно помнить о целях сборки.
Например, если все, что вам нужно, это надежность и мощность, а 4,8 л — самый доступный вариант, то это, вероятно, лучший вариант для вас. Имейте в виду, что двигатели объемом 4,8 л часто имеют такую же или даже большую мощность, чем старые и часто более крупные двигатели V8, которые они заменяют, поэтому размер не всегда решает все.Хотя и не цена. Почти каждый опытный сборщик LS скажет вам, как важно покупать самый полный двигатель , который вы можете себе позволить, а не только самый дешевый. В противном случае шансы и концы действительно будут складываться против вас.
Другого пути нет: двигатели LS очень востребованы, и это часто увеличивает стоимость. Хотя они все еще существуют в сфере доступности, чаще всего владельцы запрашивают премиальную цену, особенно если они знают, что сидят на чем-то особенном. Ознакомьтесь с нашим руководством по поиску двигателей LS, чтобы получить некоторые советы и рекомендации при покупке на свалке или у частных продавцов.
Сколько вы готовы потратить?
Тем не менее, двигатели LS9 и LSA часто являются самыми экстремальными, поскольку они могут стоить почти 10 000 долларов США из-за нагнетателя. 5,3 л, 6,0 л и 6,2 л обычно стоят от 1500 до 3000 долларов, в то время как несколько 5,7 л могут достигать диапазона 5 тысяч долларов. Вообще говоря, 4.8s потребует наименьшей суммы денег (вероятно, несколько сотен долларов в большинстве случаев), но LY6 также предлагает некоторую отдачу от затраченных средств.Обычно он работает довольно дешево, а размер его отверстия позволяет быстро набирать мощность. YouTuber в видео ниже объясняет, что LS4 и LQ4 также попадают в эту область потенциала, но поскольку они хорошо известны, их цена немного выше.
Если вы ищете что-то уже мощное, то лучшим выбором будут двигатели большего рабочего объема: 6,0 л и 6,2 л. Эти двигатели уже развивают мощность более 300 л.с., так что если на данный момент этого достаточно, то все, о чем осталось заботиться, — это установить их на место.
Однако, если вы строите LS, вы найдете больше споров.
Наш друг Джон Потучек из Keystone Automotive, к которому мы часто обращаемся во время таких размышлений о LS, склоняется к L33, мощному, но редкому варианту, который выпускался ограниченным тиражом с 05 по 07 год. «Мои друзья часто называют его «заводским гоночным двигателем», — говорит он. «Это алюминиевый блок объемом 5,3 л, поршни с плоским верхом, внутренние детали Gen4 и хорошие головки. Некоторые люди боятся алюминиевого блока, считая его слишком слабым, но это не так.У двигателя 5.3 хорошие толстые стенки, и он постоянно используется в двигателях мощностью 1000 л.с.».
Точка зрения Джона на 5.3 с толстыми стенками важно помнить, когда вы думаете, что вы хотите от своего двигателя. Повышенная надежность этого двигателя в сочетании с его изобилием и доступностью являются факторами, влияющими на то, почему так много строителей выбирают его. Если вам интересно, почему кто-то выбирает 6.0 и 6.2, если 5.3 может развивать 1000 л. ваш бюджет против ваших планов сборки и, в конечном счете, набор навыков.
Помните: многие запасные части для двигателей LS взаимозаменяемы независимо от рабочего объема. Впускные, выпускные, кулачковые и даже наддувные решения обычно стоят одинаково независимо от двигателя.
Ты делаешь ты
Стоит повторить: лучший двигатель LS для вас — самый полный, который вы можете себе позволить. Иногда это более дешевый вариант с умеренной мощностью, а иногда это большой зверь с большой мощностью. Двигатель LS, как правило, доступен по цене и легко модифицируется, поэтому во многих случаях все, с чего вы можете начать, будет достаточно хорошим.
Даже если вы обнаружите, что копаетесь на свалках и в рекламных объявлениях, расшифровывая коды двигателей LS и экономя свой бюджет, помните, что вся причина, по которой все любят эту платформу, заключается в ее потенциале . Сосредоточьтесь на том, куда двигатель может двигаться , а не на том, с чего он начинается. Так что, если вы можете позволить себе только «менее желанный» LS? Вы все еще в отличной форме, чтобы построить что-то совершенно уникальное.
Нравится:
Нравится Загрузка…
Родственные
| Главная > Схемы деталей двигателя
| 715-873-4083
|
Двигатели | Двигатель Бэббиджа
Двигатели
Чарльз Бэббидж (1791-1871), пионер компьютерной техники, разработал два класса машин: разностные машины и аналитические машины.Разностные машины названы так из-за математического принципа, на котором они основаны, а именно метода конечных разностей. Прелесть метода в том, что он использует только арифметическое сложение и устраняет необходимость в умножении и делении, которые сложнее реализовать механически.
Разностные машины — это строго калькуляторы. Они перемалывают числа единственным известным им способом — многократным сложением по методу конечных разностей. Их нельзя использовать для общих арифметических вычислений.Аналитическая машина — это гораздо больше, чем калькулятор, и она знаменует собой переход от механизированной арифметики вычислений к полноценным вычислениям общего назначения. На разных этапах развития его идей было как минимум три проекта. Так что совершенно правильно говорить об аналитических машинах во множественном числе.
Двоичные, десятичные числа и обнаружение ошибок
Вычислительные машины Бэббиджа представляют собой десятичные цифровые машины. Они десятичные в том смысле, что в них используются знакомые десять цифр от «0» до «9», и цифровые в том смысле, что только целые числа распознаются как действительные.Числовые значения представлены шестеренками, и каждой цифре числа соответствует свое колесо. Если колесо останавливается в положении, промежуточном между целыми числовыми значениями, значение считается неопределенным, и двигатель заклинивает, чтобы указать, что целостность расчета была нарушена. Заглушение — это форма обнаружения ошибок.
Бэббидж рассматривал возможность использования систем счисления, отличных от десятичной, включая двоичную систему счисления, а также системы счисления 3, 4, 5, 12, 16 и 100. Он остановился на десятичной системе из соображений инженерной эффективности — чтобы уменьшить количество движущихся частей — а также из-за их повседневное знакомство.
Отличие двигателя № 1
Бэббидж начал в 1821 году с разностной машины № 1, предназначенной для вычисления и табулирования полиномиальных функций. Проект описывает машину для расчета ряда значений и автоматической печати результатов в таблице. Неотъемлемой частью концепции дизайна является печатающее устройство, механически связанное с вычислительной секцией и являющееся неотъемлемой частью ее. Разностная машина № 1 — это первый законченный проект автоматической вычислительной машины.
Время от времени Бэббидж менял мощность Паровозика.На чертеже 1830 года показана машина, выполняющая вычисления с шестнадцатью цифрами и шестью порядками разности. Для двигателя потребовалось около 25 000 деталей, поровну распределенных между вычислительной секцией и принтером. Если бы он был построен, то весил бы примерно четыре тонны и имел бы высоту около восьми футов. Работы по строительству двигателя были остановлены в 1832 году из-за спора с инженером Джозефом Клементом. Государственное финансирование было окончательно прекращено в 1842 году.
Аналитическая машина
Когда строительный проект застопорился и освободился от гаек и болтов детальной конструкции, Бэббидж задумал в 1834 году более амбициозную машину, позже названную Аналитической машиной, универсальной программируемой вычислительной машиной.
Аналитическая машина обладает многими важными функциями современного цифрового компьютера. Его можно было запрограммировать с помощью перфокарт — идея, заимствованная у жаккардового станка, используемого для ткачества сложных узоров на текстиле. В движке было «Хранилище», где могли храниться числа и промежуточные результаты, и отдельная «Мельница», где выполнялась арифметическая обработка. Он имел внутренний репертуар из четырех арифметических функций и мог выполнять прямое умножение и деление. Он также мог выполнять функции, для которых у нас есть современные названия: условное ветвление, зацикливание (итерация), микропрограммирование, параллельная обработка, итерация, фиксация, опрос и формирование импульса, среди прочего, хотя Бэббидж нигде не использовал эти термины.У него было множество выходных данных, включая распечатку на бумаге, перфокарты, построение графиков и автоматическое производство стереотипов — лотков из мягкого материала, в которые впечатывались результаты, которые можно было использовать в качестве форм для изготовления печатных форм.
Логическая структура аналитической машины была по существу такой же, как и та, которая доминировала в разработке компьютеров в эпоху электроники — отделение памяти («Хранилище») от центрального процессора («Мельница»), последовательная работа с использованием «цикл выборки-выполнения», а также средства для ввода и вывода данных и инструкций.Назвать Бэббиджа «первым компьютерным пионером» не случайно.
Новая разностная машина
Когда к 1840 году новаторская работа над аналитической машиной была в основном завершена, Бэббидж начал рассматривать новую разностную машину. Между 1847 и 1849 годами он завершил разработку разностной машины № 2, улучшенной версии оригинала. Этот движок вычисляет числа длиной в тридцать одну цифру и может табулировать любой многочлен до седьмого порядка. Конструкция была элегантно простой и требовала лишь примерно одной трети деталей, необходимых для разностной машины № 1.1, обеспечивая аналогичную вычислительную мощность.
Difference Engine No. 2 и Analytical Engine имеют одинаковую конструкцию принтера — устройства вывода с замечательными функциями. Он не только производит распечатку на бумажном носителе в качестве контрольной копии, но также автоматически стереотипирует результаты, то есть отпечатывает результаты на мягком материале, например, на гипсе, который можно использовать в качестве формы, из которой может сделал. Аппарат печатает результаты автоматически и позволяет программируемое форматирование, т.е.е. позволяет оператору предварительно настроить расположение результатов на странице. Изменяемые пользователем функции включают переменную высоту строки, переменное количество столбцов, переменные поля столбцов, автоматический перенос строк или перенос столбцов, а также оставление пустых строк через каждые несколько строк для удобства чтения.
Физическое наследие
За исключением нескольких частично законченных механических узлов и тестовых моделей небольших рабочих секций, ни один из проектов Бэббиджа не был полностью физически реализован при его жизни.Основная сборка, которую он выполнил, была одной седьмой части Разностной машины № 1, демонстрационного образца, состоящего примерно из 2000 деталей, собранных в 1832 году. Она безупречно работает по сей день и является первым успешным автоматическим вычислительным устройством, воплощающим математическое правило в механизме. Небольшая экспериментальная часть аналитической машины строилась на момент смерти Бэббиджа в 1871 году. Многие из небольших экспериментальных сборок сохранились, как и обширный архив его рисунков и записных книжек.
Проекты огромных механических вычислительных машин Бэббиджа считаются одним из поразительных интеллектуальных достижений 19-го -го -го века. Только в последние десятилетия его работа была подробно изучена, и масштабы того, что он сделал, становятся все более очевидными.
Я знаю свой VIN. Какой у меня двигатель LS?
Идентификация двигателей Chevy LS по VIN
Малоблочные двигатели Chevrolet 3-го и 4-го поколения обычно известны по коду RPO.Вы можете определить код RPO, если у вас есть идентификационный номер автомобиля (VIN) от оригинального автомобиля.
- Найдите 8-ю цифру VIN.
- Обратитесь к таблицам ниже, чтобы определить свой двигатель.
Примечания
- Приведенная ниже информация относится к автомобилям с установленным оригинальным двигателем.
- Щелкните код RPO в таблице, чтобы просмотреть дополнительные сведения об этом двигателе.
| Ген.3, Двигатели автомобиля LS | |||
| 8-я цифра VIN | Код РПО | Дисп. | Общее имя |
| Г | ЛС1 | 5,7 л | ЛС1 |
| С | ЛС6 | ЛС6 | |
| Gen. 3, двигатели для грузовиков LS | |||
| 8-я цифра VIN | Код РПО | Дисп. | Общее имя |
| Железный блок | |||
| В | LR4 | 4.8л | Вортек 4800 |
| Т | ЛМ7 | 5,3 л | Вортек 5300 |
| З | Л59 | ||
| У | LQ4 | 6,0 л | Вортек 6000 |
| Н | LQ9 | Vortec HO 6000 или VortecMax | |
| Алюминиевый блок | |||
| Р | ЛМ4 | 5.3л | Вортек 5300 |
| Б | Л33 | Vortec 5300 H.O. | |
| Gen. 4, LS Автомобильные двигатели | |||
| 8-я цифра VIN | Код РПО | Дисп. | Обычное имя (примечания) |
| С | ЛС4 | 5,3 л | LS4 (только передний привод) |
| У | ЛС2 | 6.0л | ЛС2 |
| Д | Л76 | Л76 | |
| 2 | Л77 | Л77 | |
| Ш | ЛС3 | 6,2 л | ЛС3 |
| Дж | Л99 | Л99 | |
| Р | ЛСА | LSA (с наддувом) | |
| Т | ЛС9 | LS9 (с наддувом) | |
| Е | ЛС7 | 7.0л | ЛС7 |
| Gen. 4, двигатели для грузовиков LS | |||
| 8-я цифра VIN | Код РПО | Дисп. | Общее имя |
| Железный блок | |||
| С | LY2 | 4,8 л | Вортек 4800 |
| А | Л20 | ||
| Дж | LY5 | 5.3л | Вортек 5300 |
| 0 | Ручной пулемет | ||
| 4 | ЛМФ | ||
| К | LY6 | 6,0 л | Вортек 6000 |
| Г | Л96 | ||
| Алюминиевый блок | |||
| М | LH6 | 5,3 л | Вортек 5300 |
| 3 или 7 | ЛК9 | ||
| Л | LH8 | ||
| Р | LH9 | ||
| Н | ЛС2 | 6. | |