
Автоматика и телемеханика на железнодорожном транспорте
Каждый из нас, садясь в поезд, хочет быть уверенным, что в пути следования с поездом ничего не случится. Безопасность движения пассажирских и грузовых поездов обеспечат выпускники специальности «Автоматика и телемеханика на транспорте (железнодорожном транспорте)».
Именно они изучают системы и устройства интервального регулирования движения поездов и вопросы обеспечения безопасности движения на железнодорожном транспорте. В перечень изучаемых устройств входят как простейшие из них (реле, светофоры, трансформаторы, стрелочные переводы, рельсовые цепи, транзисторы, интегральные микросхемы), так и системы управления движением на станциях, на перегонах (между станциями). На смену системам релейным идут электронные и цифровые системы телеуправления и контроля. На этой же специальности изучают устройства ДИСК, КТСМ (системы диагностики подвижного состава на ходу поезда), АЛСН (автоматическая локомотивная сигнализация), САУТ (система автоматического управления тормозами) и многое другое. В настоящее время внедряются автоматизированные рабочие места (АРМы), которые позволяют руководителям любого уровня вести дистанционный мониторинг состояния станционных путей, перегонных светофоров, устройств электропитания, находясь за экраном компьютера. Все эти устройства состоят из тысяч электронных элементов, объединенных вместе и решающих нужную задачу, поэтому знания электроники и вычислительной техники просто необходимы.
В настоящее время внедряются автоматизированные рабочие места (АРМы), которые позволяют руководителям любого уровня вести дистанционный мониторинг состояния станционных путей, перегонных светофоров, устройств электропитания, находясь за экраном компьютера. Все эти устройства состоят из тысяч электронных элементов, объединенных вместе и решающих нужную задачу, поэтому знания электроники и вычислительной техники просто необходимы.
Ко всем этим устройствам предъявляются очень жесткие требования, так как от их надежной работы зависит безопасность движения поездов. Наряду с теорией большое внимание уделяется практическому обучению, например, строительству и монтажу устройств автоматики. В общем, это настоящая мужская профессия.
Подобные системы автоматики и управления широко используются в самых различных отраслях промышленности. Например, в системах управления станками, производственными линиями. Поэтому выпускники этой специальности находят применение своим силам и знаниям не только на железнодорожном транспорте.
Чем занимается техник на железнодорожном транспорте? Главная его задача — квалифицированное техническое обслуживание, ремонт, обеспечение надежной работы устройств и систем железнодорожной автоматики и телемеханики. Есть утвержденный график технического обслуживания, в соответствии с которым техник следит за устройствами, проводит измерения и регулировку параметров устройств, вовремя их чистит, смазывает, заменяет, подтягивает крепления, меняет лампы светофоров, и т.д. Конечно, если что-то вышло из строя (в принципе этого не должно быть), он немедленно выясняет причину, находит неисправность и устраняет ее. Чем меньше неисправностей, тем лучше оценивается его работа.
Выпускник должен быть готов к профессиональной деятельности по техническому обслуживанию устройств систем сигнализации, централизации и блокировки (СЦБ) и железнодорожной автоматики и телемеханики (ЖАТ).
Для подготовки специалистов со столь высокими требованиями на отделении имеются специализированные лаборатории (перегонных систем автоматики, станционных систем автоматики, основ автоматики и электропитания устройств АТМ), специализированные учебные мастерские и учебный полигон с самым современным оборудованием, применяемым в настоящее время на производстве.
Теоретические основы автоматики и телемеханики
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ 0 1 0 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА. ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ» УФИМСКИЙ ИНСТИТУТ ПУТЕЙ СООБЩЕНИЯ — ФИЛИАЛ САМГУПС Факультет высшего профессионального образования Кафедра общеобразовательных и профессиональных дисциплин ТЕОРЕТИЧЕСКИЕ ОСНОВЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ Методические указания к выполнению курсовой работы по дисциплине «Теоретические основы автоматики и телемеханики» для студентов специальности 190901.65 «Системы обеспечения движения поездов» заочной формы обучения Составители: Р.Р. Юсупов Л.А. Плешакова Самара 2014 УДК 656.25 Теоретические основы автоматики и телемеханики : методические указания по дисциплине к выполнению курсовой работы по дисциплине «Теоретические основы автоматики и телемеханики» для студентов специальности 190901. 65 «Системы обеспечения движения поездов» заочной формы обучения / составители : Р.Р. Юсупов, Л.А. Плешакова. — Самара : СамГУПС, 2014. — 16 с. Приведены методические указания по выполнению курсовой работы для студентов по рассматриваемой дисциплине. В методических указаниях содержатся основные сведению о построении дискретного устройства на контактах электромагнитных реле и на цифровых интегральных микросхемах. Приведены некоторые условные графические обозначения в электрических схемах, контрольные вопросы к защите курсовой работы. Утверждены на заседании кафедры ОиПД 13 декабря 2014 г, протокол № 5. Печатаются по решению редакционно-издательского совета университета. Составители: Юсупов Руслан Рифович Плешакова Лариса Александровна Рецензенты: зав. кафедрой «АТС на ж.-д. транспорте», к.т.н., профессор (СамГУПС) В.Б. Гуменников зав. кафедрой «Электротехника» (СамГУПС), д.т.н., профессор (СамГУПС) А.Е. Дубинин Подписано в печать 23.12.2014 г. Формат 60 х 90 1/16. Усл. печ. л. 1,00. Тираж 40 экз.
65 «Системы обеспечения движения поездов» заочной формы обучения / составители : Р.Р. Юсупов, Л.А. Плешакова. — Самара : СамГУПС, 2014. — 16 с. Приведены методические указания по выполнению курсовой работы для студентов по рассматриваемой дисциплине. В методических указаниях содержатся основные сведению о построении дискретного устройства на контактах электромагнитных реле и на цифровых интегральных микросхемах. Приведены некоторые условные графические обозначения в электрических схемах, контрольные вопросы к защите курсовой работы. Утверждены на заседании кафедры ОиПД 13 декабря 2014 г, протокол № 5. Печатаются по решению редакционно-издательского совета университета. Составители: Юсупов Руслан Рифович Плешакова Лариса Александровна Рецензенты: зав. кафедрой «АТС на ж.-д. транспорте», к.т.н., профессор (СамГУПС) В.Б. Гуменников зав. кафедрой «Электротехника» (СамГУПС), д.т.н., профессор (СамГУПС) А.Е. Дубинин Подписано в печать 23.12.2014 г. Формат 60 х 90 1/16. Усл. печ. л. 1,00. Тираж 40 экз. Заказ 296. © Самарский государственный университет путей сообщения, 2014 1. ПОСТРОЕНИЕ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ ДИСКРЕТНОГО УСТРОЙСТВА НА ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ Контакты реле соединяют в соответствии с булевой функцией (БФ) [2, 3], описывающей работу устройства. Если в БФ входная переменная входит без инверсии, то она соответствует замыкающему (фронтовому) контакту реле, если с инверсией — то размыкающему (тыловому) контакту. Конъюнкция соответствует последовательному соединению контактов (или цепей), дизъюнкция — параллельному соединению контактов (или цепей). Если в параллельных цепях имеются фронтовой и тыловой контакты, соответствующие одной и той же входной переменной, и они имеют общую точку, то возможна замена их на один переключающий контакт (контактный тройник) -— рис. 1.1. Это дает экономию числа контактных пружин. Рис. 1.1 Допустим, что имеется БФ, представленная в скобочной форме [3]: у =а с(аЁ” Бае)* Беа* РЁ)” ьеЁ(а* а). Этой форме соответствует схема, показанная на рис.
Заказ 296. © Самарский государственный университет путей сообщения, 2014 1. ПОСТРОЕНИЕ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ ДИСКРЕТНОГО УСТРОЙСТВА НА ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ Контакты реле соединяют в соответствии с булевой функцией (БФ) [2, 3], описывающей работу устройства. Если в БФ входная переменная входит без инверсии, то она соответствует замыкающему (фронтовому) контакту реле, если с инверсией — то размыкающему (тыловому) контакту. Конъюнкция соответствует последовательному соединению контактов (или цепей), дизъюнкция — параллельному соединению контактов (или цепей). Если в параллельных цепях имеются фронтовой и тыловой контакты, соответствующие одной и той же входной переменной, и они имеют общую точку, то возможна замена их на один переключающий контакт (контактный тройник) -— рис. 1.1. Это дает экономию числа контактных пружин. Рис. 1.1 Допустим, что имеется БФ, представленная в скобочной форме [3]: у =а с(аЁ” Бае)* Беа* РЁ)” ьеЁ(а* а). Этой форме соответствует схема, показанная на рис..jpg) 1.2. а ГОН а е гыг? Рис. 1.2 Е а Используя переместительные законы [2-4], ветви схемы и контакты в ветвях можно расположить таким образом, что в параллельных ветвях появятся одноименные фронтовые 5 и тыловые контакты, имеющие общие точки (рис. 1.3). Их можно заменить на контактные тройники. а Бе с ее | | а [ О Ел = о В: Г а у г [> [ } Рис. 1.3 На рис. 1.4 приведена схема, в которой контакты @иа; Бир; аи а; Ги Е заменены на контактные тройники. Рис. 1.4 В курсовой работе следует получить аналогичные схемы (с контактными тройниками) для всех БФ, перечисленных в задании. По этим схемам необходимо подсчитать количество различных контактов (замыкающих, размыкающих, переключающих) для каждого реле, а далее, на основании полученных данных по справочнику |5] выбрать для каждого входа устройства реле заданного типа с соответствующими контактными наборами (паспортными номерами). При этом следует стремиться к максимально возможному использованию контактного набора каждого из реле. При невозможности подобрать одно реле с подходящим контактным набором можно использовать несколько реле, совокупность контактных наборов у которых обеспечивает реализацию полученных БФ.
1.2. а ГОН а е гыг? Рис. 1.2 Е а Используя переместительные законы [2-4], ветви схемы и контакты в ветвях можно расположить таким образом, что в параллельных ветвях появятся одноименные фронтовые 5 и тыловые контакты, имеющие общие точки (рис. 1.3). Их можно заменить на контактные тройники. а Бе с ее | | а [ О Ел = о В: Г а у г [> [ } Рис. 1.3 На рис. 1.4 приведена схема, в которой контакты @иа; Бир; аи а; Ги Е заменены на контактные тройники. Рис. 1.4 В курсовой работе следует получить аналогичные схемы (с контактными тройниками) для всех БФ, перечисленных в задании. По этим схемам необходимо подсчитать количество различных контактов (замыкающих, размыкающих, переключающих) для каждого реле, а далее, на основании полученных данных по справочнику |5] выбрать для каждого входа устройства реле заданного типа с соответствующими контактными наборами (паспортными номерами). При этом следует стремиться к максимально возможному использованию контактного набора каждого из реле. При невозможности подобрать одно реле с подходящим контактным набором можно использовать несколько реле, совокупность контактных наборов у которых обеспечивает реализацию полученных БФ. При этом обмотки реле надо включить на параллельную работу. При выборе реле следует также учитывать возможность использования в качестве 6 фронтового или тылового контакта соответствующей контактной пары (замыкающей или размыкающей) в тройнике (если, например, нужных контактов нет, а тройники остались лишние). Обмотки реле могут быть подключены к источникам входных сигналов логического автомата непосредственно или через согласующие усилители. В первом случае параметры входных сигналов, соответствующие их нулевым и единичным значениям, должны обеспечивать надежное отпускание и срабатывание реле (с учетом числа реле, подключенных к каждому входу). Во втором случае можно использовать простейший транзисторный усилитель, схема которого приведена на рис. 1.5. о к1| К? Ур 1-2 ЧЕ тт! Е Вх. сигнал УТ Рис. 1.5 При выполнении курсовой работы схему включения обмоток и соединения контактов реле следует выполнить на одном листе. а _ а|1 |а ар |а _ 1 а СНЕ. 9г. а _ а! |а “Ь | аь а | а Ч пр а ь и 1 | 46 2 | — Ъ | Ь 2 ий [5 13 == 15.
При этом обмотки реле надо включить на параллельную работу. При выборе реле следует также учитывать возможность использования в качестве 6 фронтового или тылового контакта соответствующей контактной пары (замыкающей или размыкающей) в тройнике (если, например, нужных контактов нет, а тройники остались лишние). Обмотки реле могут быть подключены к источникам входных сигналов логического автомата непосредственно или через согласующие усилители. В первом случае параметры входных сигналов, соответствующие их нулевым и единичным значениям, должны обеспечивать надежное отпускание и срабатывание реле (с учетом числа реле, подключенных к каждому входу). Во втором случае можно использовать простейший транзисторный усилитель, схема которого приведена на рис. 1.5. о к1| К? Ур 1-2 ЧЕ тт! Е Вх. сигнал УТ Рис. 1.5 При выполнении курсовой работы схему включения обмоток и соединения контактов реле следует выполнить на одном листе. а _ а|1 |а ар |а _ 1 а СНЕ. 9г. а _ а! |а “Ь | аь а | а Ч пр а ь и 1 | 46 2 | — Ъ | Ь 2 ий [5 13 == 15. ит [5 [5 — в < Г = я < = и [5 |3 — =. © < © Рис. 2.3 Полученная БФ реализуется схемой на рис. 2.4. т Т т НЕ 2—1! с 1 Ч |! | Рис. 2.4 Такой порядок преобразования БФ в базисы И-НЕ и ИЛИ-НЕ сохраняется и в более сложных функциях. Рассмотрим следующий пример [3]: При этом соответствующую этой форме записи структурную схему целесообразно начертить в виде, представленном на рис. 2.5. Здесь входные сигналы и их инверсии подаются на шины, с которых соответствующие сигналы поступают на входы элементов схемы. Аналогичные схемы необходимо построить для каждого выхода устройства. Затем по справочнику (например, по [6, 7]) подбирают подходящие (из указанных в 10 задании) микросхемы, соответствующие полученным функциональным схемам. Однако в реальных условиях в заданной серии (или среди микросхем, разрешенных к применению) могут не оказаться элементы с требуемым числом входов. В этом случае можно использовать элементы с ббльшим или меньшим числом входов. Рис. 2.5 Если число входов элемента превышает требуемое, то на неиспользуемые входы для уменьшения влияния помех следует подавать постоянный потенциал, соответствующий единичному (для элементов И-НЕ) или нулевому (для элементов ИЛИ- НЕ) значениям сигналов.
ит [5 [5 — в < Г = я < = и [5 |3 — =. © < © Рис. 2.3 Полученная БФ реализуется схемой на рис. 2.4. т Т т НЕ 2—1! с 1 Ч |! | Рис. 2.4 Такой порядок преобразования БФ в базисы И-НЕ и ИЛИ-НЕ сохраняется и в более сложных функциях. Рассмотрим следующий пример [3]: При этом соответствующую этой форме записи структурную схему целесообразно начертить в виде, представленном на рис. 2.5. Здесь входные сигналы и их инверсии подаются на шины, с которых соответствующие сигналы поступают на входы элементов схемы. Аналогичные схемы необходимо построить для каждого выхода устройства. Затем по справочнику (например, по [6, 7]) подбирают подходящие (из указанных в 10 задании) микросхемы, соответствующие полученным функциональным схемам. Однако в реальных условиях в заданной серии (или среди микросхем, разрешенных к применению) могут не оказаться элементы с требуемым числом входов. В этом случае можно использовать элементы с ббльшим или меньшим числом входов. Рис. 2.5 Если число входов элемента превышает требуемое, то на неиспользуемые входы для уменьшения влияния помех следует подавать постоянный потенциал, соответствующий единичному (для элементов И-НЕ) или нулевому (для элементов ИЛИ- НЕ) значениям сигналов. Неиспользуемые входы можно также подключать параллельно используемым, однако при этом возрастает ток, потребляемый от источника входного сигнала. Некоторые варианты включения элементов 4И-НЕ и 4ИЛИ-НЕ вместо элементов 2И-НЕ и 2ИЛИ-НЕ приведены на рис. 2.6. а а— ны -ЬН — = |7 [2 а а— а я а ‘| а —| АР АН У НЫ Т 11 Рис. 2.6 Если для реализации БФ требуются элементы с числом входов бблышим, чем имеется у реальных элементов, то БФ следует дополнительно преобразовать. Ниже приведены примеры таких преобразований (рис. 2.7 и 2.8): а/Ь/с/4 =абса =(аБ)(са) =(@а1Ъ) Ксга). а/ь/с/а =абса =(абс)а =(а/Ь/с)/а_ а—& [а {[& аб а] & | ь- [абса ВЕ | ТЦ абса мые с с &]а с & [абса а а— $ Ф а Рис. 2.7 ар Бу ста =а» Б* с‘ а =(а` Б)* (с» а) =а1 Б)+ (ста). ать тс а =а» Б» с” 4 =(а» Ь» с)» а =(а1 + с) а. а а-1 1 1 ь- _ 8 ТЕ Ш 5 с— с Гос 1 а- а «Г а Рис. 2.8 ВНИМАНИЕ! Типичной ошибкой при использовании элементов с меньшим, чем требуется, числом входов является использование сочетательного закона для штриха Шеффера и стрелки Пирса при преобразовании БФ.
Неиспользуемые входы можно также подключать параллельно используемым, однако при этом возрастает ток, потребляемый от источника входного сигнала. Некоторые варианты включения элементов 4И-НЕ и 4ИЛИ-НЕ вместо элементов 2И-НЕ и 2ИЛИ-НЕ приведены на рис. 2.6. а а— ны -ЬН — = |7 [2 а а— а я а ‘| а —| АР АН У НЫ Т 11 Рис. 2.6 Если для реализации БФ требуются элементы с числом входов бблышим, чем имеется у реальных элементов, то БФ следует дополнительно преобразовать. Ниже приведены примеры таких преобразований (рис. 2.7 и 2.8): а/Ь/с/4 =абса =(аБ)(са) =(@а1Ъ) Ксга). а/ь/с/а =абса =(абс)а =(а/Ь/с)/а_ а—& [а {[& аб а] & | ь- [абса ВЕ | ТЦ абса мые с с &]а с & [абса а а— $ Ф а Рис. 2.7 ар Бу ста =а» Б* с‘ а =(а` Б)* (с» а) =а1 Б)+ (ста). ать тс а =а» Б» с” 4 =(а» Ь» с)» а =(а1 + с) а. а а-1 1 1 ь- _ 8 ТЕ Ш 5 с— с Гос 1 а- а «Г а Рис. 2.8 ВНИМАНИЕ! Типичной ошибкой при использовании элементов с меньшим, чем требуется, числом входов является использование сочетательного закона для штриха Шеффера и стрелки Пирса при преобразовании БФ. Следует иметь в виду, что для указанных функций этот закон несправедлив: а/Ь/с/а =(а!Ь) Кс! а) =(а/Ь/с)!а ар ста =(а1 Б)1 (с1 а) =афьЕ о а поскольку абс #(аБ{са) = (абс) а . 12 БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические основы железнодорожной автоматики и телемеханики [Текст] : Учеб. для вузов / Под ред. В.В. Сапожникова. — М. : Маршрут, 2012. — 417 с. 2. Сапожников В. В., Кравцов Ю. А., Сапожников Вл. В. Теория дискретных устройств железнодорожной автоматики, телемеханики и связи [Текст] : учеб. для вузов ж.-д. трансп. / Под ред. В. В. Сапожникова, 2-е изд., перераб. и доп. — М. : УМК МПС России, 2001. — 312 с. 3. Синтез логического автомата [Текст] : методические указания к выполнению курсовой работы по дисциплине «Теория дискретных устройств автоматики и телемеханики» для студентов специальности «Автоматика, телемеханика и связь на железнодорожном транспорте» очной и заочной форм обучения / составитель Л.А. Плешакова. — Самара : СамГУПС, 2009.
Следует иметь в виду, что для указанных функций этот закон несправедлив: а/Ь/с/а =(а!Ь) Кс! а) =(а/Ь/с)!а ар ста =(а1 Б)1 (с1 а) =афьЕ о а поскольку абс #(аБ{са) = (абс) а . 12 БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические основы железнодорожной автоматики и телемеханики [Текст] : Учеб. для вузов / Под ред. В.В. Сапожникова. — М. : Маршрут, 2012. — 417 с. 2. Сапожников В. В., Кравцов Ю. А., Сапожников Вл. В. Теория дискретных устройств железнодорожной автоматики, телемеханики и связи [Текст] : учеб. для вузов ж.-д. трансп. / Под ред. В. В. Сапожникова, 2-е изд., перераб. и доп. — М. : УМК МПС России, 2001. — 312 с. 3. Синтез логического автомата [Текст] : методические указания к выполнению курсовой работы по дисциплине «Теория дискретных устройств автоматики и телемеханики» для студентов специальности «Автоматика, телемеханика и связь на железнодорожном транспорте» очной и заочной форм обучения / составитель Л.А. Плешакова. — Самара : СамГУПС, 2009. — 52 с. : ил 4. Методические указания к выполнению контрольной работы по дисциплине «Теория дискретных устройств» для студентов заочной формы обучения специальности 190901.65 «Системы обеспечения движения поездов» [Текст] / составитель Р.Р. Юсупов. — Самара : СамГУПС, 2014. — 28 с. 5. Сороко В.И. Реле железнодорожной автоматики и телемеханики [Текст]. — М. : НПФ «ПЛАНЕТА», 2002. — 696 с. 6. Нефедов А.В. Интегральные микросхемы и их зарубежные аналоги [Текст] : Справочник. В 12-ти кн. — М. : ИП РадиоСОФТ, 1999. 7. Цифровые и аналоговые интегральные микросхемы [Текст] : Справочник / С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова и др.; Под ред. С.В. Якубовского. — М. : Радио и связь, 1990. — 496 с. : ил 8. Общие требования к оформлению учебных текстовых и графических документов [Текст] : методические указания к оформлению курсовых проектов, расчетно- графических и курсовых работ, рефератов для студентов всех форм обучения электротехнических специальностей. В 2 ч. Часть 1 / Лариса Александровна Плешакова.
— 52 с. : ил 4. Методические указания к выполнению контрольной работы по дисциплине «Теория дискретных устройств» для студентов заочной формы обучения специальности 190901.65 «Системы обеспечения движения поездов» [Текст] / составитель Р.Р. Юсупов. — Самара : СамГУПС, 2014. — 28 с. 5. Сороко В.И. Реле железнодорожной автоматики и телемеханики [Текст]. — М. : НПФ «ПЛАНЕТА», 2002. — 696 с. 6. Нефедов А.В. Интегральные микросхемы и их зарубежные аналоги [Текст] : Справочник. В 12-ти кн. — М. : ИП РадиоСОФТ, 1999. 7. Цифровые и аналоговые интегральные микросхемы [Текст] : Справочник / С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова и др.; Под ред. С.В. Якубовского. — М. : Радио и связь, 1990. — 496 с. : ил 8. Общие требования к оформлению учебных текстовых и графических документов [Текст] : методические указания к оформлению курсовых проектов, расчетно- графических и курсовых работ, рефератов для студентов всех форм обучения электротехнических специальностей. В 2 ч. Часть 1 / Лариса Александровна Плешакова. — Самара : СамГУПС, 2007. — 56 с. : ил. — 500 экз. 9. Общие требования к оформлению учебных текстовых и графических документов [Текст] : условные графические обозначения в электрических схемах для студентов всех форм обучения электротехнических специальностей. В 2 ч. Часть 2 / Лариса Александровна Плешакова. — Самара : СамГУПС, 2007. — 36 с. : ил. — 500 экз. 15 Приложение НЕКОТОРЫЕ УСЛОВНЫЕ ГРАФИЧЕСКИЕ ОБОЗНАЧЕНИЯ В ЭЛЕКТРИЧЕСКИХ СХЕМАХ Наименование Обозначение 1. Катушка реле 1-го и 2-го класса надежности (ГОСТ 2.749-84) 8-10 2; 2. Контакт нейтрального якоря реле (ГОСТ 2.749-84) 8 У. = -_ о З замыкающий размыкающий (фронтовой) (тыловой) — переключающий (контактный тройник) 3. Корпус (машины, прибора, аппарата) (ГОСТ 2.751-73) с 5:10 4. Элементы цифровой техники (ГОСТ 2.743-82) если в основном поле помещают только символ функции (не более 3-х знаков), то размеры основного поля должны быть, мм: минимальная высота от 10 до 12; ширина от 8 до 12; ширина дополнительного поля — не менее 5 мм.
— Самара : СамГУПС, 2007. — 56 с. : ил. — 500 экз. 9. Общие требования к оформлению учебных текстовых и графических документов [Текст] : условные графические обозначения в электрических схемах для студентов всех форм обучения электротехнических специальностей. В 2 ч. Часть 2 / Лариса Александровна Плешакова. — Самара : СамГУПС, 2007. — 36 с. : ил. — 500 экз. 15 Приложение НЕКОТОРЫЕ УСЛОВНЫЕ ГРАФИЧЕСКИЕ ОБОЗНАЧЕНИЯ В ЭЛЕКТРИЧЕСКИХ СХЕМАХ Наименование Обозначение 1. Катушка реле 1-го и 2-го класса надежности (ГОСТ 2.749-84) 8-10 2; 2. Контакт нейтрального якоря реле (ГОСТ 2.749-84) 8 У. = -_ о З замыкающий размыкающий (фронтовой) (тыловой) — переключающий (контактный тройник) 3. Корпус (машины, прибора, аппарата) (ГОСТ 2.751-73) с 5:10 4. Элементы цифровой техники (ГОСТ 2.743-82) если в основном поле помещают только символ функции (не более 3-х знаков), то размеры основного поля должны быть, мм: минимальная высота от 10 до 12; ширина от 8 до 12; ширина дополнительного поля — не менее 5 мм. а) основное поле | 6) входы элемента 5. Контакт разъемного соединения (ГОСТ 2.755-74) ОУ 90° 2`»3 У 16
а) основное поле | 6) входы элемента 5. Контакт разъемного соединения (ГОСТ 2.755-74) ОУ 90° 2`»3 У 16
Устройства железнодорожной автоматики и телемеханики
Совмещенная питающая установка СПУ 200Р +АБТЦ
- Предназначена для питания релейных ЭЦ крупных станций и АБТЦ / АБТЦ-ЕМ
- Сертифицирована для применения на железнодорожном транспорте РФ
- Универсальная и надежная система с коммутацией трех независимых фидеров.
- Многоступенчатая защита от импульсных перенапряжений
- Мониторинг состояния СПУ в СТДМ в реальном времени
- Автономное электропитание устройств ЖАТ не менее 2 часов
- Совместима с любой системой заземления при использовании ВУФ
- Гальваническая изоляция устройств ЖАТ от внешних источников электроснабжения
- Питание стрелок постоянного тока
НАЗНАЧЕНИЕ
Совмещенная питающая установка СПУ 200Р+АБТЦ предназначена для высококачественного бесперебойного питания любых типов релейных централизаций крупных станций с числом стрелок до 200 совместно с автоблокировкой централизованного размещения оборудования АБТЦ или АБТЦ-ЕМ. СПУ 200Р+АБТЦ предназначена для размещения в помещениях капитальных постов ЭЦ.
СПУ 200Р+АБТЦ предназначена для размещения в помещениях капитальных постов ЭЦ.
ОСОБЕННОСТИ
Установка имеет совмещенную конструкцию с общим вводным щитом ЩАВР, распределительным щитом РЩ и тремя трансформаторными щитами: ТЩ1 и ТЩ2 для питания нагрузок МПЦ и ТЩ3 для питания нагрузок АБТЦ. Для световой индикации на различных пульт-табло предусмотрены изолированные полюса питания от 7 до 25 В большой мощности, где полюса мигания реализованы на основе бесконтактных твердотельных контакторов и реле.
В качестве источников постоянного тока применяются современные малогабаритные импульсные источники питания, включенные параллельно и имеющие функцию автоматического распределения мощности нагрузки. Резервирование источников питания по мощности осуществлено по принципу n+1. Для обеспечения бесперебойного питания устройств ЖАТ в составе СПУ применяется система бесперебойного питания. В составе системы входят три параллельно работающих устройства бесперебойного питания УБП промышленного исполнения производства компании GE DE.
Время переключения на питание от аккумуляторных батарей при пропадании внешней сети является нулевым. Все критические элементы системы резервируемы и отсутствует единая точка отказа в работе. Система построена по принципу резервирования мощности n+1, при котором отказ одного УБП не приводит к перегрузке других, оставшихся в работе.
Данное решение также позволяет выполнять техническое обслуживание любого УБП без прерывания питания нагрузки. УБП имеют русифицированный интерфейс и возможность дистанционной диагностики системами СТДМ. СПУ 200Р может осуществлять электропитание электродвигателей как переменного так и постоянного тока.
профиль специалитета в вузах России
Автоматика и телемеханика на железнодорожном транспорте в России: проходные баллы, минимальные баллы, экзамены, в каких вузах учат, стоимость обучения, вступительные экзамены
Сводная информация
Проходной балл: от 118
Мест: 533
Комбинация ЕГЭ 3
Предметы ЕГЭ
Математика (профиль)
Русский язык
Физика
Вступительные испытания
Физическая подготовка
Посмотрите варианты
Сводная информация
Проходной балл: от 99
Мест: 495
Стоимость: от 48300
Комбинация ЕГЭ 3
Предметы ЕГЭ
Математика (профиль)
Русский язык
Физика
Вступительные испытания
Физическая подготовка
Посмотрите варианты
Параметры программы
Квалификация: Специалитет;
Язык обучения: Русский;
На базе: 11 классов;
Курс: Полный курс;
Где учат
О программе
*
* набор дисциплин может незначительно отличаться в зависимости от вуза. Смотрите подробности на странице программы в нужном вузе
Смотрите подробности на странице программы в нужном вузе
В перечень изучаемых устройств входят как простейшие из них (реле, светофоры, трансформаторы, стрелочные переводы, рельсовые цепи, транзисторы, интегральные микросхемы), так и системы управления движением на станциях, на перегонах (между станциями). На смену системам релейным идут электронные и цифровые системы телеуправления и контроля. На этой же специальности изучают: системы диагностики подвижного состава на ходу поезда, автоматическую локомотивную сигнализацию, системы автоматического управления тормозами и многое другое.
Дисциплины, изучаемые в рамках профиля:
- Электромагнитная совместимость и средства защиты
- Теоретические основы построения и эксплуатации микропроцессорных и диагностических систем автоматики
- Техническое обслуживание устройств систем сигнализации, централизации, блокировки (СЦБ) и железнодорожной автоматики и телемеханики (ЖАТ)
- Основы технического обслуживания устройств систем СЦБ и ЖАТ
- Организация и проведение ремонта и регулировки устройств и приборов систем сигнализации, централизации, блокировки (СЦБ) и железнодорожной автоматики и телемеханики
- Технология ремонтно-регулировочных работ устройств и приборов систем СЦБ и ЖАТ
- Общий курс железнодорожного транспорта
- Теоретические основы электротехники
- Электрические машины
- Транспортная безопасность
- Основы теории надёжности
- Теория безопасности движения поездов
- Теоретические основы автоматики и телемеханики
- Электропитание и электроснабжение нетяговых потребителей
- Теория передачи сигналов
- Построение и эксплуатация станционных, перегонных, микропроцессорных и диагностических систем железнодорожной автоматики
- Теоретические основы построения и эксплуатации станционных систем железнодорожной автоматики
- Теоретические основы построения и эксплуатации перегонных систем железнодорожной автоматики
- Диспетчерская централизация
- Организация производства и менеджмент
- Эффективность инвестиционных проектов
- Системы менеджмента качества в хозяйстве автоматики и телемеханики
- Экономика железнодорожного транспорта
- Основы маркетинга
Примерная рабочая программа по курсу “Теоретические основы автоматики и телемеханики”
Министерство
образования Республики Беларусь
Белорусский государственный
университет транспорта
Примерная рабочая программа
по курсу “Теоретические основы
автоматики и телемеханики”
для специальности Т
11. 05 «Автоматика, телемеханика и связь на транспорте»
05 «Автоматика, телемеханика и связь на транспорте»
(специализация «Автоматика и телемеханика»)
Факультет — электротехнический
кафедра “Автоматика и телемеханика”
курс 3, 4
семестры 7, 8
Лекции | Консультации (по графику ФБО) |
Практические | Экзамен 8 семестр |
Лабораторные занятия 6 час. | |
СУРС | |
Самостоятельная | Всего |
1. ЦЕЛИ, ЗАДАЧИ ДИСЦИПЛИНЫ, ЕЕ
ЦЕЛИ, ЗАДАЧИ ДИСЦИПЛИНЫ, ЕЕ
МЕСТО В УЧЕБНОМ ПРОЦЕССЕ
1.1.
Цель преподавания
дисциплины.
Предметом изучения дисциплины являются наиболее важные
разделы теории автоматического управления включающие в себя теорию
проектирования и расчет элементов автоматики, теорию телемеханического
управления и теорию автоматического регулирования. Целью изучения дисциплины
является подготовка студента к успешному освоению специальных дисциплин,
посвященных изучению принципов построения автоматических и телемеханических
систем, используемых на железнодорожном транспорте.
1.2. Задачи изучения
дисциплины.
Изучив дисциплину студент должен:
1.2.1. Знать конструкцию, принцип действия и
характеристики основных элементов автоматики и телемеханики (в том числе
элементов железнодорожной автоматики и телемеханики), принцип построения и
основные узлы систем автоматического управления и телемеханических систем.
1.2.2. Уметь осуществлять выбор и расчет элементов
автоматики и телемеханики, производить проектирование и анализ функционирования
автоматических и телемеханических систем, обеспечивать их высокую надежность.
1.2.3. Иметь представление о тенденциях и перспективах
развития систем автоматического управления в промышленности и на
железнодорожном транспорте.
1.3. Перечень дисциплин, усвоение которых необходимо
студентам для изучения данной дисциплины.
1.
Физика;
2.
Высшая математика;
3.
Теоретические основы
электротехники;
4.
Электронные устройства ж.д.
автоматики, телемеханики и связи;
5.
Теория линейных электрических
цепей;
6.
Общий курс транспорта;
7.
Вычислительная техника и
программирование.
2. СОДЕРЖАНИЕ ДИСЦИПЛИНЫ
2.2 Курс лекционных занятий – 16 часов
7 семестр – 6 часов | |
1. 2. 3. 4. | 2 часа |
5. 6. 7. 8. | 2 часа |
9. 10. | 2 часа |
8 семестр – 10 часов | |
11. Устройства А и Т для выполнения 12. 13. | 2 часа |
14. Общая характеристика объектов и | 2 часа |
15. Дифференциальные уравнения | 2 часа |
16. Релейные, импульсные и цифровые | 2 часа |
17. 18. Методы анализа и синтеза 19. Условия и критерии устойчивости линейных САР. 20. Методы анализа нелинейных САР. 21. Метод математического | 2 часа |

 Временные диаграммы.
Временные диаграммы.
2.3. Курс
практических занятий –
8 часа
|
Контрольная Теоретические основы 📝 автоматики и телемеханики Телемеханик
1. Сколько стоит помощь?
Сколько стоит помощь?
Цена, как известно, зависит от объёма, сложности и срочности. Особенностью «Всё сдал!» является то, что все заказчики работают со экспертами напрямую (без посредников). Поэтому цены в 2-3 раза ниже.
2. Каковы сроки?
Специалистам под силу выполнить как срочный заказ, так и сложный, требующий существенных временных затрат. Для каждой работы определяются оптимальные сроки. Например, помощь с курсовой работой – 5-7 дней. Сообщите нам ваши сроки, и мы выполним работу не позднее указанной даты. P.S.: наши эксперты всегда стараются выполнить работу раньше срока.
3. Выполняете ли вы срочные заказы?
Да, у нас большой опыт выполнения срочных заказов.
4. Если потребуется доработка или дополнительная консультация, это бесплатно?
Да, доработки и консультации в рамках заказа бесплатны, и выполняются в максимально короткие сроки.
5. Я разместил заказ. Могу ли я не платить, если меня не устроит стоимость?
Да, конечно — оценка стоимости бесплатна и ни к чему вас не обязывает.
6. Каким способом можно произвести оплату?
Работу можно оплатить множеством способом: картой Visa / MasterCard, с баланса мобильного, в терминале, в салонах Евросеть / Связной, через Сбербанк и т. д.
д.
7. Предоставляете ли вы гарантии на услуги?
На все виды услуг мы даем гарантию. Если эксперт не справится — мы вернём 100% суммы.
8. Какой у вас режим работы?
Мы принимаем заявки 7 дней в неделю, 24 часа в сутки.
Автоматика и телемеханика
Система управления — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение, предназначенный для достижения определённых целей. Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
Системы управления с участием людей как объектов управления зачастую называют системами менеджмента, то есть автоматизированным управлением.
Техническая структура управления — устройство или набор устройств для манипулирования поведением других устройств или систем.
Объектом управления может быть любая динамическая система или её модель. Состояние объекта характеризуется некоторыми количественными величинами, изменяющимися во времени, то есть переменными состояния. В естественных процессах в роли таких переменных может выступать температура, плотность определённого вещества в организме, курс ценных бумаг и т. д. Для технических объектов это механические перемещения (угловые или линейные) и их скорость, электрические переменные, температуры и т. д. Анализ и синтез систем управления проводится методами специального раздела математики — теории управления.
Структуры управления разделяют на два больших класса:
v Автоматизированная система управления (АСУ) — с участием человека в контуре управления;
v Система автоматического управления (САУ) — без участия человека в контуре управления.
Типы систем автоматического управления
Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
По цели управления
Объект управления — изменение состояния объекта в соответствии с заданным законом управления. Такое изменение происходит в результате внешних факторов, например, вследствие управляющих или возмущающих воздействий.
Системы автоматического регулирования
Системы автоматической стабилизации. Выходное значение поддерживается на постоянном уровне (заданное значение — константа). Отклонения возникают за счёт возмущений и при включении.
Системы программного регулирования. Заданное значение изменяется по заранее заданному программному закону f. Наряду с ошибками, встречающимися в системах автоматического регулирования, здесь также имеют место ошибки от инерционности регулятора.
Следящие системы. Входное воздействие неизвестно. Оно определяется только в процессе функционирования системы. Ошибки очень сильно зависят от вида функции f(t).
Системы экстремального регулирования
Способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования данного объекта. Критерием качества, который обычно называют целевой функцией, показателем экстремума или экстремальной характеристикой, может быть либо непосредственно измеряемая физическая величина (например, температура, ток, напряжение, влажность, давление), либо КПД, производительность и др.
Адаптивные системы автоматического управления
Служат для обеспечения желаемого качества процесса при широком диапазоне изменения характеристик объектов управления и возмущений.
По виду информации в управляющем устройстве
Замкнутые САУ. В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь выхода системы с его входом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь выхода системы с его входом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
Разомкнутые САУ.
Сущность принципа разомкнутого управления заключается в жёстко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Примеры таких систем: таймер, блок управления светофора, автоматическая система полива газона, автоматическая стиральная машина и т. п.
Характеристика САУ
В зависимости от описания переменных системы делятся на линейные и нелинейные. К линейным относятся системы, состоящие из элементов описания, которые задаются линейными алгебраическими или дифференциальными уравнениями.
Если все параметры уравнения движения системы не меняются во времени, то такая система называется стационарной. Если хотя бы один параметр уравнения движения системы меняется во времени, то система называется нестационарной или с переменными параметрами.
Если хотя бы один параметр уравнения движения системы меняется во времени, то система называется нестационарной или с переменными параметрами.
Системы, в которых определены внешние (задающие) воздействия и описываются непрерывными или дискретными функциями во времени, относятся к классу детерминированных систем.
Системы, в которых имеет место случайные сигнальные или параметрические воздействия и описываются стохастическими дифференциальными или разностными уравнениями, относятся к классу стохастических систем.
Если в системе есть хотя бы один элемент, описание которого задается уравнением частных производных, то система относится к классу систем с распределенными переменными.
Системы, в которых непрерывная динамика, порождаемая в каждый момент времени, перемежается с дискретными командами, посылаемыми извне, называются гибридными системами.
АВТОМАТИКА, -и, ж.
1. Отрасль науки и техники, разрабатывающая теорию и методы автоматизации производственных процессов.
2. Совокупность механизмов, приспособлений, действующих автоматически.
Автоматика (автомат + ика, т.е. υκα, указывающий на научность) — область науки и техники, занимающаяся построением автоматических систем, к которым относятся автоматизированные устройства, машины, цеха, заводы и т. д., выполняющих определенные технологические функции без личного участия людей. Теоретической основой автоматики. служит техническая кибернетика. Материальной основой автоматики являются автоматические приборы, устройства, средства автоматизации, различные электронные, полупроводниковые приборы, вычислительные машины и другие автоматические системы (АС).
Автоматическая система (АС) — совокупность машин и устройств, что, взаимодействуя в производственном процессе, выполняют определенные функции по заданному законе без вмешательства человека.
Различают три класса АС:
1) системы с жестким программным управлением по неизменной последовательностью действий,
2) системы автоматического регулирования по определенным законам;
3) автоматические системы самонастройки (адаптивные системы).
Системы с жестким программным управлением по неизменной последовательностью действий выполняют свои функции исключительно по заранее установленной программе (латинское pro от греческого προ, т.е. вперед, и γραμμα — черта), которая заложена в задающем устройстве. Так действуют станки-автоматы, поточные линии и т.д., когда внешние помехи и отклонения настолько незначительны, что их можно не учитывать. Например часовые автоматы, таймеры и т.д.
Автоматический привод (АП) — автоматическое устройство для приведения в движение рабочих органов различных машин и управление ими без участия человека. Наибольшее распространение получили электрические АП, состоящих из электродвигателей и устройств автоматического пуска и управления. Последние выполняют следующие функции: автоматический пуск, торможение, остановка и реверсирование электродвигателей, а также автоматическое регулирование по заданной программе или с автоматическим выбором наиболее рациональных режимов. Некоторые сложные АП включают в себя специальные вычислительные устройства — микропроцессоры.
Некоторые сложные АП включают в себя специальные вычислительные устройства — микропроцессоры.
Системы автоматического управления по определенным законам учитывают не только данную программу, но и информацию о входящих внешние действия (системы слежения, регулирования, стабилизации и т.д.).
Автоматическая защита — одна из форм автоматического управления, применяемая для предупреждения повреждений или нарушений заданного цикла производственных установок при возникновении ненормальных режимов работы. При действии автоматической защиты: измеряются параметры контролируемых величин (например, температура, ток, напряжение, мощность, уровень и т.д.) и при отклонении их от нормальных значений производятся сигналы, предупреждающие об опасности или вызывают автоматическое отключение. Большое внимание уделяется автоматическом защиты в энергетических высоковольтных установках и звеньях. Здесь задача состоит в том, чтобы отключить поврежденное оборудование или участок сети, предупредить аварию или ограничить ее развитие.
Автоматическая синхронизация — поддержка одновременности параметров каких-либо процессов, например двух колебаний. Автоматическая синхронизация широко применяется в осциллографах, телевизионной технике, автоматике, телемеханике, телеметрии и т.д. Автоматическая синхронизация осуществляется либо автономно, т.е. независимо, или принудительно. Для принудительной синхронизации автоколебательных систем используется, в частности, явление захвата.
Автоматический контроль (АК) — автоматическое получение, обработка и регистрация информации о состоянии объекта. Процесс АК разделяется на ряд простых операций:
1) получения первичной информации о контролируемых величины с помощью измерений, сравнения с мерой,
2) преобразования первичной информации к виду, удобному для дальнейшей обработки,
3) выявление специфических особенностей,
4) регистрация,
5) запоминание и т.д.
Основными устройствами для получения первичной информации являются первичные преобразователи-датчики, по другой терминологии датчики. Промежуточные преобразователи осуществляют усиление сигналов, квантования, различные математические операции (интегрирование, сложение, умножение и т.д.), кодирования и декодирования. Регистрация, запоминание, или сигнализация передача на расстояние обработанной информации служат в АК завершающими операциями. АК всегда является составной частью более сложного процесса автоматического управления в составе автоматических систем контроля (АСК).
Промежуточные преобразователи осуществляют усиление сигналов, квантования, различные математические операции (интегрирование, сложение, умножение и т.д.), кодирования и декодирования. Регистрация, запоминание, или сигнализация передача на расстояние обработанной информации служат в АК завершающими операциями. АК всегда является составной частью более сложного процесса автоматического управления в составе автоматических систем контроля (АСК).
Системы третьего класса, т.е. самонастройки, часто называют адаптивными (приспосабливаемых) системами, способ функционирования (алгоритм или программа) управляющей части которых автоматически изменяется с целью осуществления в каком-либо смысле лучшего, оптимального управления. Разновидностями адаптивных систем является самонастраивающихся системы, самообучающиеся или самоорганизующиеся.
АВТОМАТИЗАЦИЯ И ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ АППАРАТОЙ ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ЖЕЛЕЗНЫХ ДОРОГ
АВТОМАТИЗАЦИЯ И ТЕЛЕМЕХАНИЗАЦИЯ УСТРОЙСТВ ЭНЕРГОСНАБЖЕНИЯ ЭЛЕКТРИЧЕСКИХ ЖЕЛЕЗНЫХ ДОРОГ
Книга написана по программе курса: «Основы автоматики, автоматики и телемеханики средствами электроснабжения железнодорожного транспорта», который изучается на кафедре «Электрификация железнодорожного транспорта» на железнодорожном транспорте. институты по специальности: «Электроснабжение железных дорог».В книге рассматриваются основы автоматики и телемеханики, а также автоматизированные и телемеханизированные устройства, применяемые для управления системами электроснабжения электрических железных дорог. Основное внимание обращено на элементы, узлы и схемы устройств, получившие широчайшее применение в автоматике и телемеханике электрических железных дорог. Подробно рассмотрены проблемы передачи телемеханизированной информации. Принципы построения и использования постоянно цитируются вместе с описанием конкретных механизмов.Книга одобрена Главными административными учебными заведениями Министерства путей сообщения в качестве учебника для высших учебных заведений железнодорожного транспорта, а также может быть использована инженерно-техническими работниками, занимающимися проектированием и эксплуатацией устройств электроснабжения электрических железных дорог.
институты по специальности: «Электроснабжение железных дорог».В книге рассматриваются основы автоматики и телемеханики, а также автоматизированные и телемеханизированные устройства, применяемые для управления системами электроснабжения электрических железных дорог. Основное внимание обращено на элементы, узлы и схемы устройств, получившие широчайшее применение в автоматике и телемеханике электрических железных дорог. Подробно рассмотрены проблемы передачи телемеханизированной информации. Принципы построения и использования постоянно цитируются вместе с описанием конкретных механизмов.Книга одобрена Главными административными учебными заведениями Министерства путей сообщения в качестве учебника для высших учебных заведений железнодорожного транспорта, а также может быть использована инженерно-техническими работниками, занимающимися проектированием и эксплуатацией устройств электроснабжения электрических железных дорог.
Язык
Информация о СМИ
Тема/Указатель Термины
Информация о подаче
- Регистрационный номер: 00130033
- Тип записи:
Публикация - Источник агентства: Федеральное управление железных дорог
- Файлы: ТРИС, USDOT
Дата создания:
17 ноября 1977 г. , 00:00
, 00:00
 , 00:00
, 00:00Хроника кафедры технической кибернетики
Научные интересы и направления кафедры инженеров технической кибернетики (ДТК) определились, когда в 1944/45 учебном году доцент, к.Д. Ивахненко Алексей Григорьевич читал курс «Основы автоматического управления» для первой группы КПИ конструктора электроприборов (КЭП-1) специалиста «Автоматика и измерительная техника».
Созданную в 1969 году кафедру ДТК возглавил бывший студент группы СЭА-6 (а затем, после отделения СЭА, руководитель группы АО-6) д.т.н. Костюк Всеволод Иванович – кандидат медицинских наук. и доктор наук. кандидат О.Г.Ивахненка. В составе кафедры 15 преподавателей автоматики и телемеханики (АТ), в том числе 2 профессора – Д.наук О.Г.Ивахненко, д.т.н. В.М.Кунцевич — и 5 доцентов. В формировании материально-технической базы кафедры ДТК активное участие приняли заведующие лабораторией М.И.Бельский, В.М.Фан, учебный мастер В.М.Васильев и другие.
Первоначально кафедра обеспечивала учебный процесс по 10 дисциплинам специальностей КПИ: Теория автоматического контроля и управления, Автоматические системы привода и слежения, Математические основы кибернетики, Основы автоматизации, Техническая кибернетика. В 1969/70 учебном году В.И.Костюк читал курс «Оптимально-адаптивные системы». За серию монографий в этой области первая премия КПИ 1975 г. присуждена В.И.Костюку, А.Х.Кику, В.Е.Краскевичу, А.М.Сильвестрову и С.В.Шпиту. В 1973/74 учебном году доцент В.В.Ажохин разработал курс «Теория и применение компьютерного управления».
В 1969/70 учебном году В.И.Костюк читал курс «Оптимально-адаптивные системы». За серию монографий в этой области первая премия КПИ 1975 г. присуждена В.И.Костюку, А.Х.Кику, В.Е.Краскевичу, А.М.Сильвестрову и С.В.Шпиту. В 1973/74 учебном году доцент В.В.Ажохин разработал курс «Теория и применение компьютерного управления».
В соответствии с потребностями народного хозяйства кафедра трижды меняла направления подготовки специалистов: автоматика и телемеханика (АТ), автоматизированные системы управления (АСУ), робототехника, гибкие компьютеризированные системы и робототехника.Студенты всех специальностей изучали теорию автоматического управления (ТАУ). Важный вклад в методическое и техническое обеспечение данного курса внес доцент, к.т.н. С.В.Шпит. Создал универсальный лабораторный стенд (демонстрировался на выставках в Украине и Монголии, принят в серийное производство) и электронный учебник.
Диплома по специальности АТ на кафедре ДТК защитили 900 студентов.
В 1969/70 учебном году по специальности АСУ и был произведен прием на 1 класс на очную и спецфакультет к студентам старших курсов других специальностей. Ю.П.Зайченко доцент, к.т.н. прочитал первый спецкурс «Исследование операций». В дальнейшем была создана специальная дисциплина д.т.н. В.И.Скурыхиным, к.т.н. Ю.П.Зайченко, С.В.Шпит, В.М.Игнатенко, В.Е.Краскевич, Ф.М.Кисилевский, А.Х.Кику. Было издано 4 книги. Первыми выпускниками АСУ (1973 г.) стали 23 инженера, а всего до 1978 г. — почти 1800 человек.
Ю.П.Зайченко доцент, к.т.н. прочитал первый спецкурс «Исследование операций». В дальнейшем была создана специальная дисциплина д.т.н. В.И.Скурыхиным, к.т.н. Ю.П.Зайченко, С.В.Шпит, В.М.Игнатенко, В.Е.Краскевич, Ф.М.Кисилевский, А.Х.Кику. Было издано 4 книги. Первыми выпускниками АСУ (1973 г.) стали 23 инженера, а всего до 1978 г. — почти 1800 человек.
В 1978 г. на базе кафедры ДТК создан отдел автоматического производства систем управления. Тогда кафедра ДТК впервые в Украине начала подготовку инженеров по специальности «АСУ в робототехническом производстве».В 1981 году поступил на 1 курс специальности «Робототехника». С 1982 года на спецфакультете была открыта специальность «Механика и управляющие машины — роботы и манипуляторы». В составе Научно-методического совета при Министерстве просвещения СССР на кафедре были разработаны учебные планы и рабочие программы основных дисциплин по ряду специальностей.
С 1994 года кафедра осуществляет подготовку специалистов по следующим направлениям: интеллектуальные интегрированные системы, компьютеризированные интегрированные системы и робототехника, а с 1997 года — гибкие компьютеризированные системы и робототехника. Преподавание новых специальностей вели Л.С.Ямпольский, В.М.Игнатенко, Е.М.Литвинов, О.А.Стенин, Ю.И.Кисленко, А.Ю.Савицкий, С.П.Поливяный, В.С.Недавний. Издано 8 книг. Впервые в Украине в 1992 г. была введена новая дисциплина «Искусственный интеллект в планировании и управлении производством», были учебники по украинскому языку и мощные практические исследования с испытательными системами (авторы — Л.С.Ямпольский, О.А.Лавров). Издание в 2005 году комплекса из трех учебников «Гибкие компьютеризированные системы: проектирование, моделирование и управление» (авторы: профессор Л.С.Ямпольский, П.П.Мельничук, Б.Б.Самотокин, М.М.Полищук; доцент М.М.Ткач, К.Б.Остапченко, О.И.Лисовиченко) первыми в Украине широко внедрили в учебную литературу новую мультимедийную технологию.
Преподавание новых специальностей вели Л.С.Ямпольский, В.М.Игнатенко, Е.М.Литвинов, О.А.Стенин, Ю.И.Кисленко, А.Ю.Савицкий, С.П.Поливяный, В.С.Недавний. Издано 8 книг. Впервые в Украине в 1992 г. была введена новая дисциплина «Искусственный интеллект в планировании и управлении производством», были учебники по украинскому языку и мощные практические исследования с испытательными системами (авторы — Л.С.Ямпольский, О.А.Лавров). Издание в 2005 году комплекса из трех учебников «Гибкие компьютеризированные системы: проектирование, моделирование и управление» (авторы: профессор Л.С.Ямпольский, П.П.Мельничук, Б.Б.Самотокин, М.М.Полищук; доцент М.М.Ткач, К.Б.Остапченко, О.И.Лисовиченко) первыми в Украине широко внедрили в учебную литературу новую мультимедийную технологию.
С 1979 года выпуск инженеров, бакалавров и магистров составили более 4000 человек.
С 2001 г. кафедра проходит базовую подготовку высшей научной квалификации по направлению «Автоматизация управления», а в 2001-2007 гг. — это «Гибкие производственные системы». За 10 лет работы совета было рассмотрено 17 докторских и 42 кандидатских диссертаций, посвященных проблемам современного моделирования, верификации и оптимального управления технологическими процессами, а также создания и реализации средств интеллектуальной поддержки принятия решений, автоматизации распределенных во времени и пространстве процессов. Более 12 лет возглавлял отдел подготовки кадров, лицензирования и аккредитации высших и средних технических учебных заведений (направления: информатика, математика и гибкие компьютерные интегрированные системы), а также образовательных и программ повышения квалификации.Соответствующий специализированный научно-экспертный совет во главе с профессором В.И.Костюком (председатель) и профессором Л.С.Ямпольским (ученый секретарь).
— это «Гибкие производственные системы». За 10 лет работы совета было рассмотрено 17 докторских и 42 кандидатских диссертаций, посвященных проблемам современного моделирования, верификации и оптимального управления технологическими процессами, а также создания и реализации средств интеллектуальной поддержки принятия решений, автоматизации распределенных во времени и пространстве процессов. Более 12 лет возглавлял отдел подготовки кадров, лицензирования и аккредитации высших и средних технических учебных заведений (направления: информатика, математика и гибкие компьютерные интегрированные системы), а также образовательных и программ повышения квалификации.Соответствующий специализированный научно-экспертный совет во главе с профессором В.И.Костюком (председатель) и профессором Л.С.Ямпольским (ученый секретарь).
В 70-е годы на кафедре создана научная школа моделирования сложных систем и адаптивных систем автоматического управления (руководитель — В.И.Костюк). Результаты исследований нашли применение в различных областях: автоматизация химических производств (В. В.Ажохин, В.Д.Романенко, М.З.Журовский, А.Ю.Савицкий, А.П.Мовчан), автоматизация электронно-лучевой технологии, дефектоскопия сварных швов (Ф.М. Кисилевский) управление процессами сборки в приборе (А.А.Краснопрошина), оптическая обработка информации (А.С.Островский), оперативное контрольно-измерительное производство (О.А.Павлов), адаптивные системы идентификации (А.М.Сильвестров), робототехника, гибкие автоматизированные производственные системы (Л.С.Ямпольский), адаптивные процессы и поля управления (В.Е.Краскевич), построение систем обучения операторов подвижных объектов (В.М.Игнатенко ).
В.Ажохин, В.Д.Романенко, М.З.Журовский, А.Ю.Савицкий, А.П.Мовчан), автоматизация электронно-лучевой технологии, дефектоскопия сварных швов (Ф.М. Кисилевский) управление процессами сборки в приборе (А.А.Краснопрошина), оптическая обработка информации (А.С.Островский), оперативное контрольно-измерительное производство (О.А.Павлов), адаптивные системы идентификации (А.М.Сильвестров), робототехника, гибкие автоматизированные производственные системы (Л.С.Ямпольский), адаптивные процессы и поля управления (В.Е.Краскевич), построение систем обучения операторов подвижных объектов (В.М.Игнатенко ).
В 1991 году на базе созданных в 70-х годах двух филиалов организована проблемная лаборатория Института системных технологий (НДИСТ проф.В.И.Костюк). Широкий круг научно-технических задач решался НДИСТ (Исполнители: Тимошин Ю.А., Игнатенко Б.В., Стенин О.А., Галахан В.Г.) и их заказчиков:
- Компьютеризированная система управления вузом, магистральная сеть телекоммуникаций учебных и научных учреждений, автоматизированные системы обучения, локальные компьютерные сети для отдельных вузов и министерств;
- Система экологического мониторинга окружающей среды — в порядке СХСУ Украины;
- Информационно-справочные и автоматизированные информационные системы и сети для Государственной налоговой службы, Национального банка Украины, Укрзализныци, Государственного центра занятости населения, Государственного комитета по науке и технологиям, ОАО «Укрнафта» и др. ;
- Робототехнические средства гибких производственных систем, интеллектуализированные системы в управлении и планировании производственных процессов, проблемно-ориентированные служебные помещения;
- Программное обеспечение анализа результатов летных испытаний — по запросу. Антонов АСТМ и другие.
 ;
;На кафедре ДТК защитили кандидатские диссертации более 110 аспирантов и профессоров, докторские диссертации — 14 научных сотрудников. доктора наук О.А.Павлов, В.В.Ажохин, А.С.Островский, Ю.В.П.Зайченко, А.М.Сильвестров избраны заведующими трибуны НТУУ «КПИ» Ф.М.Киселевский – заведующий кафедрой Е.А. О. Патон РВИ. Преподаватели и сотрудники кафедры опубликовали 33 монографии, 1500 научных статей, сделали 1300 докладов на конференциях, семинарах, симпозиумах, получили 43 авторских свидетельства, 18 наград на выставках. Кафедра организовала 10 всесоюзных и республиканских конференций, опубликовала 31 научную работу.
Выдающиеся научные достижения сотрудников кафедры неоднократно отмечались премиями и наградами различного уровня. В разные годы А.С.Островский, И.М.Раллыев, С.В.Шпит, О.П.Коц, Ю.П.Юрченко были награждены ОАЭ медалями СССР и СССР. В 1986 году М.В.Савков и Н.М.Панченко были награждены Республиканской премией Островского
В разные годы А.С.Островский, И.М.Раллыев, С.В.Шпит, О.П.Коц, Ю.П.Юрченко были награждены ОАЭ медалями СССР и СССР. В 1986 году М.В.Савков и Н.М.Панченко были награждены Республиканской премией Островского
.
В.И.Костюк награжден орденом «Трудового Красного Знамени», «Знаком Почета» награжден П.Я.Акинина и медалью «За труд» награжден В.М.Алонкина-Плешка.
Три книги по робототехнике (1989, 1992, 1994) удостоены Государственной премии в области науки и техники в 1996 году.Авторы: профессора В.И.Костюк, Л.С.Ямпольский, М.М.Полищук доцент. М.М.Ткач.
Наравне с основной работой преподаватели и сотрудники участвовали в строительстве учебных корпусов, библиотеки, актового зала, столовой, ремонте общежития, базы отдыха; руководил студенческими отрядами. Неоднократно занимал призовые места на «КПИ Таланты» С.В.Шпит, П.Ю.Акинин (живопись), Е.А.Дзебас (витраж). Известны стихи Л.С.Ямпольского, О.А.Стениной, Г.О.Козлаковой, Д.И.Герги, А.Х.Кику, изучение флоры Т.К.Савельевой.
Основными направлениями кафедры являются разработка новых средств вычислительной техники и технологий информационного общества, участие в программе общегосударственного значения «Космическая техника и робототехника» и подготовка специалистов для решения этих задач.
Акинин П.Ю. доцент, к.т.н.
Доцент Орынбет Марат — Satbayev University
Профессиональная биография
Профессиональная биография.
Профессиональная научная и педагогическая деятельность.
Алматинский филиал Джамбульского технологического института. Алма-Ата (1982-1988). Должность: Учитель. Кафедра общетехнических дисциплин. Алматинский технологический университет. Алма-Ата (1991-1994). Должность: старший преподаватель. Кафедра общетехнических дисциплин. Национальная академия наук Республики Казахстан. Институт информатики и управления г. Алматы (1996-2003 гг. ). Должность: старший научный сотрудник. Лаборатория системного анализа и управления.Казахстанский инженерно-технологический университет. Алматы (2003-2010 гг.) Должность: доцент, заведующий кафедрой, проректор по учебной работе. Казахский национальный исследовательский технический университет. К.И. Сатпаев. (2010 г. — по сей день). Должность: доцент. Кафедра автоматики и управления.
). Должность: старший научный сотрудник. Лаборатория системного анализа и управления.Казахстанский инженерно-технологический университет. Алматы (2003-2010 гг.) Должность: доцент, заведующий кафедрой, проректор по учебной работе. Казахский национальный исследовательский технический университет. К.И. Сатпаев. (2010 г. — по сей день). Должность: доцент. Кафедра автоматики и управления.
Научные проекты
Силлабусы.
AUT1392 Технологические измерения и приборы. 2) AUT1461 Основы автоматизации 3) AUT1091 Управление технологическим процессом
Публикации
Публикации
1) Орынбет М. Байндина Г. Построение оптимального граничного управления методом последовательных приближений. Информатика АвтоматикаПомиары 1/2014.24-26Р.
Информатика АвтоматикаПомиары 1/2014.24-26Р.
2) Орынбет М.М. Оспанбеков К.Б. Математическая модель напряженно-деформированного состояния ленточной опоры конечной и бесконечной ширины. Вестник НИА РК №1, 2015. С. 79-87
3) Орынбет М.М. Принцип построения и анализ точности работы узла подачи регулятора натяжения ремня. Вестник НИА РК N2(64), 2017.С.22-28
4) Орынбет М.М. Расчет параметров и анализ качества ленточного регулятора натяжения жесткой конструкции методом численного моделирования.Материалы Международных Сатпаевских чтений «Инновационные решения традиционных проблем: техника и технологии» 12 апреля 2018 г., стр. 1199-2002
5) Орынбет М. Каирбеков А. Система отопления газораспределительной станции. Конференция Информационные технологии и менеджмент 2019 25-26 апреля Рига 30-32
6) Орынбет М., Бигалиева В. Моделирование физико-механических процессов прецизионных сложных электромеханических систем. 17-я Международная научная конференция «Информационные технологии и менеджмент» 2019 25-26 апреля Рига 17-е 32-34
Образование
Образование.
1) Казахский политехнический институт (КазПТИ). Алма-Ата (1977-1982). Кафедра Автоматики и Телемеханики. Факультет автоматики и вычислительной техники. Специальность: Диплом 0606 — Автоматика и телемеханика. Диплом с отличием.
2) Московский государственный технический университет. Н.Э. Баумана. Г. Москва. (1988-1991 годы). Полная аспирантура. Отделение П-1.
3) В 1991 году защитил кандидатскую диссертацию на тему «Моделирование и управление сложными прецизионными электромеханическими системами».
Специальность: 051301-Управление техническими системами.
Учебный план
ДонНТУ FEMA СОДЕРЖАНИЕ СТРУКТУРА ФАКУЛЬТЕТА | Никулин Эдуард Константинович Дата и место рождения 3 июля 1938 года, г. Работает в институте с 1962 года.До 1992 года он был сотрудником
|
 Красный Луч Луганской области.
Красный Луч Луганской области.
Александр Кусомин | ХНУРЭ — Харьковский национальный университет радиоэлектроники
Образование и карьера
1967 г. – с отличием окончил ХИРЭ по специальности «Автоматика и телемеханика».
1967 г. – инженер кафедры технической электроники.
1968 г. – ассистент кафедры технической электроники.
1968-1971 гг. – аспирант кафедры технической электроники.
1971 г. – защитил кандидатскую диссертацию. кандидатская диссертация по специальности «Техническая кибернетика».
1972 г. – доцент кафедры вычислительной техники.
1991 г. – доцент Инженерная графика, Компьютерные технологии.
1993 г. – доцент кафедры прикладных программ ЭВМ. С 2001 г. – профессор кафедры информатики.
2008 г. – защитил докторскую диссертацию по специальности 05.13.06 «Методы, модели и информационные технологии мониторинга и ликвидации чрезвычайных природных ситуаций», проф.
Образовательная деятельность
учит курсы:
- «Параллельные и распределенные вычисления»,
- «Специальные языки программирования»,
- «Основы статистического моделирования и исследований зависимостей»,
- «Компьютерная наука в веб-приложениях »,
- «Основы проектирования веб-серверов»,
- «Интеллектуальная обработка данных в интернет-системах вещей»,
- «Инновационные технологии»,
- «Интеллектуальные информационные системы»,
- «Основы интернет-технологий и поисковые системы».

Научная деятельность
1975-1976, 2001 – научная стажировка в Университете Карлсруэ, Германия.
1972-1988 гг. – ответственный исполнитель ряда НИР и двух ОКР на кафедре вычислительной техники.
2003 г. – приглашенный профессор Университета Хагена, Германия, тема научной работы – «Исследование моделей P2P-передачи информации в Интернет».
2009-2011 Руководитель научно-исследовательской лаборатории BOCH, Дрезден, разработка макетов и программ «Обеспечение надежности ветрогенератора».
2013-2015 гг. – руководитель промежуточной научно-исследовательской бюджетной работы № 272-1 лет.
«Модели и методы анализа динамических процессов чрезвычайных ситуаций природного характера». Объектом исследования являются системы обеспечения информационных технологий мониторинга рисков при чрезвычайных ситуациях.
Предмет исследования – модели, методы разработки баз знаний и информационные технологии управления рисками в чрезвычайных ситуациях в условиях неопределенности и многокритериальности.
2011 г. – руководитель ПНИЛ «Технологии передачи информации для систем снижения рисков», защищены 5 кандидатских и одна докторская диссертации на тему «Методы и модели для чрезвычайных ситуаций».
1990-2013 гг. – заведующий кафедрой инноваций и маркетинга университета.
Международная деятельность/участие в международных проектах
2014-2017 – Координатор проекта «Предпринимательская сеть выпускников», 544521 – TEMPUS-1-2013-1-DE-TEMPUS-SMHES.
2014-2019 – Координатор проекта ERASMUS с Ганноверским университетом, Германия.
2013-2021- Координатор проекта «Ostpartnerschaft» с Ганноверским университетом, Германия.
Публикации и патенты
Автор более 200 публикаций и 3 учебных пособий с грифом Мин. 2 патента.
thermocontrol: значение, происхождение, определение — Словарь WordSense
thermocontrol (английский)
Происхождение и история
термо- + регулируемый
Прилагательное
терморегулируемый ( не сопоставимый )
- терморегулируемый, особенно с помощью термостата
- Цикл активации-инактивации Rab35 и ARF6 необходим для фагоцитоза зимозана в макрофагах RAW264 :
» Клетки RAW264 культивировали на круглых покровных стеклах диаметром 25 мм и собирали в заполненной RB камере на 4. Токай Хит, Сидзуока, Япония). »
 Токай Хит, Сидзуока, Япония). »
Токай Хит, Сидзуока, Япония). »Практические примеры
Автоматически сгенерированные примеры:
Зависящие от времени формы сигналов интенсивности излучения плазмы в случае 110°C терморегулируемый кварцевый колпак с использованием (1) кварцевого колпака без Sn02 тонкопленочный нагреватель и (2) тонкопленочный нагреватель Sn02.
Плазменное травление: основы и приложения — Страница 305 (М. Сугавара)
Химические методы включают фотоэмульсионную полимеризацию, термоуправляемую эмульсионную полимеризацию, радикальную полимеризацию с переносом атома (ATRP) и обратимую передачу цепи присоединения-фрагментации (RAFT). ).
Катализ и кинетика: рассмотрение на молекулярном уровне — страница 196 (Guy B. Marin)
Температуру суспензии поддерживали на уровне 4 °C с помощью терморегулируемой бани во время реакции окисления. Когда время реакции превысило 12 часов, кинетика стала очень медленной, и раствор стал желтовато-белым.
Подходы к борьбе со стихийными бедствиями: Изучение… — Страница 182 (John Tiefenbacher)
Термоуправляемый электрод униполярного типа с неизолированным золотым наконечником 4 x 2 мм вызывает объем коагуляции, который достигает постоянного уровня через 3 мин. .
Стереотаксис при синдроме Паркинсона: клинико-анатомический… — Страница 182 (Р. Хасслер)
Полупроводниковые термоконтролируемые сопротивления. Москва, Оборонгиз, 1959, 91 с.
Кибернетика, автоматизация и телемеханика: Под ред. машин… (1962)
Поделиться
Пользовательские заметки
Для этой записи нет пользовательских заметок.
Добавить примечание
Добавить примечание к записи «термоуправляемый».Напишите подсказку по использованию или пример и помогите улучшить наш словарь. Не просите о помощи, не задавайте вопросов и не жалуйтесь.
HTML-теги и ссылки не допускаются.
Все, что нарушает эти правила, будет немедленно удалено.
Next
термоконтроллер (английский)
Происхождение и история
термо- + регулятор
Имя существительное
…
термоконтроллеры (английский)
Имя существительное
термоконтроллеры
Множественное число от…
термоконверсия (английский)
Происхождение и история
термо- + конверсия
Имя существительное
…
термоконверсии (англ.)
Имя существительное
термопревращения
Множественное число от…
термопара (английский)
Происхождение и история
Из термо-+…
термопары (англ.)
Имя существительное
термопары
Термопара
термокриостат (английский)
Происхождение и история
термо- + криостат
Имя существительное
…
термокриостаты (английский)
Имя существительное
термокриостаты
Множественное число от термокриостат
термоток (английский)
Происхождение и история
термо- + ток
Имя существительное
…
термотоки (англ.)
Имя существительное
термотоки
Множественное число от термоток
Две корпорации одна марка — FIAT-HITACHI.
 Должностная инструкция сантехника Профстандарт
Должностная инструкция сантехника Профстандарт
Профессиональный стандарт «Механик-наладчик КИПиА» утвержден приказом Министерства труда и социальной защиты Российской Федерации от 25 декабря 2014 г. N 1117н Регистрационный номер 275.
Страница содержит выдержки из профессионального стандарта слесаря КИПиА.
Полный текст профстандарта по профессии Слесарь КИПиА доступен для скачивания — скачать.
Наименование вида профессиональной деятельности .
Наладка автоматических линий устройств регулирования производственных процессов, диспетчерской связи и другой автоматики.
Основная цель профессиональной деятельности .
Монтаж и наладка устройств и электрических схем различных систем автоматики.
Обобщенная трудовая функция .
Наладка простых электронных теплотехнических устройств.
Перечень трудовых функций .
1. Наладка простых электронных теплотехнических приборов, автоматических газоанализаторов, контрольно-измерительных, электромагнитных, электродинамических механизмов с подгонкой и доводкой деталей и узлов.
2. Наладка цепей управления контактно-релейными, ионными, электромагнитными и полупроводниковыми электроприводами.
3. Тестирование и поставка элементов и простых электронных компонентов со снятием характеристик.
4. Составление и раскладка схем простой и средней сложности.
I. Среднее общее образование.
II. Программы профессионального обучения для подготовки квалифицированных рабочих.
Прохождение работником противопожарного инструктажа и инструктажа по охране труда.
Обобщенная трудовая функция .
Наладка приборов и установок автоматического управления средней сложности.
Перечень трудовых функций .
1. Наладка приборов и установок автоматического управления средней сложности с суммирующим механизмом и дистанционной передачей показаний.
2. Наладка, испытание и поставка блоков средней сложности и энергетических систем, приборов и информационно-измерительных систем; проверка электрических параметров регулируемого оборудования с помощью контрольно-измерительных приборов.
3. Составление компоновочных схем для регулирования и испытаний сложных механизмов, устройств, систем.
Требования к образованию и обучению .
Не менее одного года работы по второму квалификационному уровню по профессии «Механик-наладчик КИПиА».
Особые условия приема на работу .
Наличие II квалификационной группы по электробезопасности.
Прохождение инструктажа работников по охране труда на рабочем месте.
Прохождение обязательных предварительных (при приеме на работу) и периодических медицинских осмотров (осмотров), а также внеочередных медицинских осмотров (осмотров) в порядке, установленном законодательством Российской Федерации.
Слесарь-наладчик КИПиА 4 разряда
Обобщенная трудовая функция .
Наладка, проверка и наладка сложных схем.
Перечень трудовых функций .
1. Наладка, проверка и наладка комплексных схем промышленной автоматики, телемеханики, связи, электронно-механических испытаний и электрогидравлических машин и стендов, оснащенных информационно-измерительными системами.
2. Наладка аппаратуры и блоков радиостанций, пеленгаторов, радиолокационных установок и автоматики, электронной аппаратуры.
3. Составление принципиальных и электрических схем наладочно-испытательного комплекса и опытных образцов механизмов, устройств, систем.
4. Разработка методов наладки и схем соединения регулируемого оборудования с КИП и источниками питания.
Требования к образованию и обучению .
Среднее профессиональное образование — программы подготовки квалифицированных рабочих (служащих).
Требования к практическому опыту работы .
Не менее одного года работы на третьем квалификационном уровне по профессии «Механик-наладчик КИПиА».
Особые условия приема на работу .
Прохождение работником противопожарного инструктажа.
Прохождение инструктажа работников по охране труда на рабочем месте.
Прохождение обязательных предварительных (при приеме на работу) и периодических медицинских осмотров (осмотров), а также внеочередных медицинских осмотров (осмотров) в порядке, установленном законодательством Российской Федерации.
Слесарь-наладчик КИПиА 5 разряда
Обобщенная трудовая функция .
Наладка, наладка и наладка сложных систем приборов и систем управления оборудованием на базе микропроцессорной техники.
Перечень трудовых функций .
1. Наладка, наладка и наладка сложных систем приборов и систем управления оборудованием на базе микропроцессорной техники.
2. Восстановление и ремонт элементов систем, программирование контроллеров и другого оборудования, обеспечение их вывода на заданные рабочие параметры.
3. Диагностика систем управления оборудованием с помощью специальных тестовых программ.
Требования к образованию и обучению .
Среднее профессиональное образование — программы подготовки квалифицированных рабочих (служащих).
Требования к практическому опыту работы .
Особые условия приема на работу .
Наличие квалификационной группы по электробезопасности.
Прохождение сотрудником противопожарного инструктажа.
Прохождение инструктажа работников по охране труда на рабочем месте.
Прохождение обязательных предварительных (при приеме на работу) и периодических медицинских осмотров (осмотров), а также внеочередных медицинских осмотров (осмотров) в порядке, установленном законодательством Российской Федерации.
Обобщенная трудовая функция .
Комплексная наладка, наладка и пуско-наладка сложных и уникальных систем, приборов и систем управления оборудованием на базе микропроцессорной техники.
Перечень трудовых функций .
1. Комплексная наладка, наладка и пуско-наладка сложных и уникальных систем, приборов и систем управления оборудованием на базе микропроцессорной техники.
2. Восстановление и ремонт систем, программируемых контроллеров, периферийного оборудования и их диагностика с использованием тестовых программ и стендов.
3. Разработка нестандартных плат для систем управления; анализ, систематизация отказов в работе технологического оборудования и выработка рекомендаций по их устранению.
Требования к образованию и обучению .
Среднее профессиональное образование — программы подготовки квалифицированных рабочих (служащих).
Требования к практическому опыту работы .
Не менее одного года работы на четвертом квалификационном уровне по профессии «Механик-наладчик КИПиА».
Особые условия приема на работу .
Наличие квалификационной группы по электробезопасности.
Прохождение сотрудником противопожарного инструктажа.
Прохождение инструктажа работников по охране труда на рабочем месте.
Прохождение обязательных предварительных (при приеме на работу) и периодических медицинских осмотров (осмотров), а также внеочередных медицинских осмотров (осмотров) в порядке, установленном законодательством Российской Федерации.
Производство гусеничных и колесных экскаваторов – дело достаточно затратное, прибыльное и перспективное. Обычно ими занимаются крупные инженерные корпорации с давними инженерными традициями.
Две такие корпорации — итальянская Fiat и японская Hitachi, являющаяся одной из крупнейших в мире, в 1986 году создали совместное предприятие по производству экскаваторов FIAT-HITACHI EXCAVATORS S.P.A. 60 процентов его капитала принадлежало итальянской корпорации, 40 процентов — японской корпорации.Завод располагался в пригороде Турина — городке Сан-Мауро на северо-западе Италии. Здесь было организовано производство высококачественной спецтехники – колесных и гусеничных экскаваторов, а также экскаваторов-погрузчиков.
При их разработке учитывался большой опыт создания землеройных машин. В 1993 году производство получило сертификат ISO 9001, что подтвердило высокий уровень организации производства и качества продукции. Помимо Италии и Японии, заводы компании работали в Бразилии, Германии и США.Его успешные модели и сегодня успешно работают во многих странах. Однако под этой маркой экскаваторы выпускались до 2001 года, когда СП было ликвидировано. Владельцы автомобилей этой марки изменений не почувствовали. Они по-прежнему могут обслуживаться в сервисной сети, разветвленной на всех континентах. Проблем с запчастями нет.
Они по-прежнему могут обслуживаться в сервисной сети, разветвленной на всех континентах. Проблем с запчастями нет.
Гусеничные машины
Гусеничные экскаваторы имеют преимущество большей вместимости ковша, выемки грунта с разной глубины при значительном вылете стрелы.
Fiat-Hitachi EX 455 Эксплуатация: эксплуатационная масса 46000 кг; Объем топлива 605 л.; Объем жидкости системы охлаждения 43 л.; Объем моторного масла 50 л.; Рабочее напряжение 24 В. Ток генератора 40 ампер. Давление гидравлического перепускного клапана 30 000 кПа. Производительность гидравлического насоса 720 л/мин.
Эксплуатация Fiat Hitachi EX355: Эксплуатационная масса 34000 кг; Объем топлива 560 л.; Объем жидкости системы охлаждения 39 л.; Объем жидкости в гидросистеме 320 л. Объем моторного масла 35 л. Рабочее напряжение 24 В Ток генератора 40 ампер Давление гидравлического перепускного клапана 32000 кПа Производительность гидронасоса 520 л/мин
Их ковши имеют вместимость почти два кубометра. Эти мощные машины способны выполнять самые сложные земляные работы.
Эти мощные машины способны выполнять самые сложные земляные работы.
Fiat-Hitachi EX 225 и EX 255 имеют массу более 26 тонн, двигатели мощностью 177 л.с.и почти полтора кубических ведра. Их гусеницы шириной 60 см обеспечивают высокую проходимость и минимальное давление на грунт.
FIAT-HITACHI EX255/LC/EL
Fiat-Hitachi EX 215, который весит более 21 тонны, не сильно им уступает. Однако благодаря гусеницам шириной 80 см его давление на грунт минимально. EX 165 обладает уникальными качествами. Его поворотный стол может совершать 13,2 оборота в минуту, что обеспечивает высокую производительность. Вместе с возможностью копать почти на 8 метров в длину и до пяти метров в глубину эта машина может оказаться незаменимой во многих ситуациях.
Что можно делать на колесах
Колесные экскаваторы отличаются хорошей маневренностью, способностью относительно быстро передвигаться по дорогам, не создавая проблем другим участникам дорожного движения. Это позволяет быстро перебрасывать их на разные объекты для работы с самыми сложными грунтами. Благодаря отличным эксплуатационным характеристикам они всегда востребованы.
Это позволяет быстро перебрасывать их на разные объекты для работы с самыми сложными грунтами. Благодаря отличным эксплуатационным характеристикам они всегда востребованы.
21-тонная колесная машина Fiat-Hitachi EX 215W, может копать далеко и глубоко, быстро перемещаться на новое место работы, имеет быстросменное устройство.
Fiat-Hitachi EX 215W
Меньший 14-тонный EX 135 с двигателем мощностью 103 л.с. имеет компактные габариты и способен выполнять работы там, где не может подобраться мощная гусеничная техника. Хорошие технические характеристики FH 200W с двигателем мощностью 125 л.с. Имеет вес 19,2 т, ковш объемом 1,5 м3 и гидравлическую линию для навесного оборудования.
Легкий и функциональный
Колесные экскаваторы-погрузчики отличаются широким функционалом.Они могут копать ямы и траншеи, загружать и разгружать сыпучие грузы, обслуживать аварийные бригады по ремонту коммуникаций, наводить порядок на территории и планировать строительные площадки и выполнять другие работы.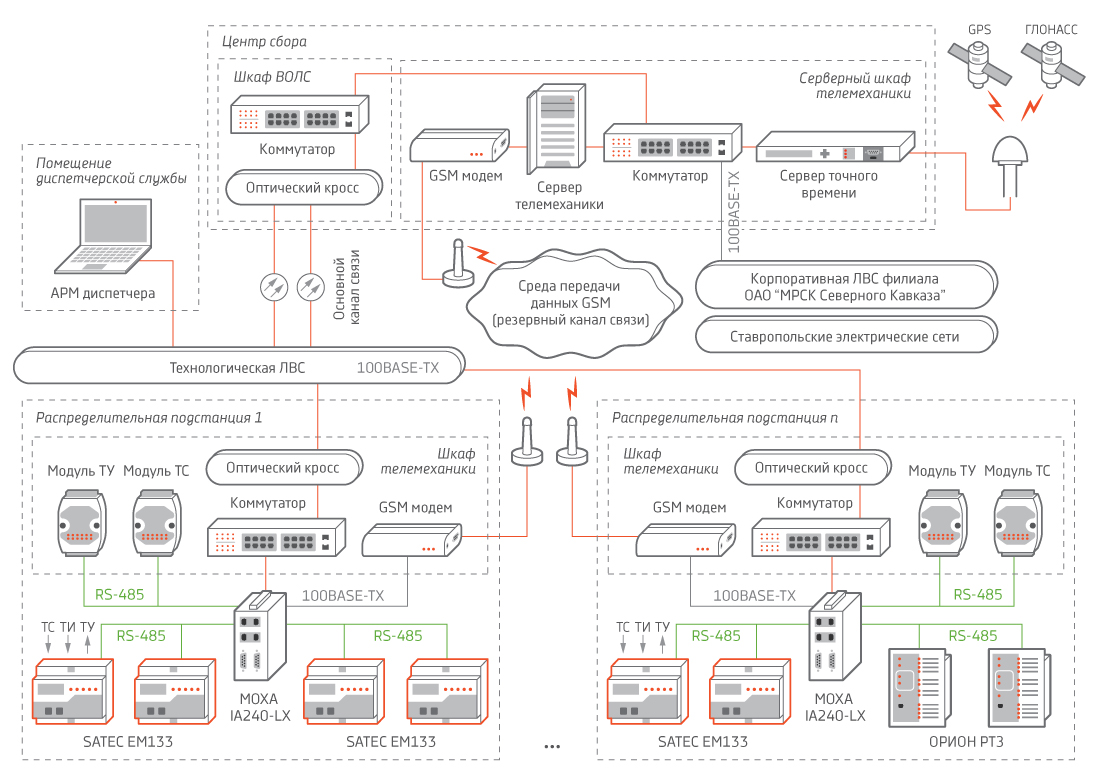 Этому способствует навесное оборудование, которое можно быстро установить на такие машины. Они могут быстро передвигаться по обычным дорогам, обладают завидной проходимостью. Их оборудование в основном одинаково. Ковш спереди, экскаватор с обратной лопатой сзади и обязательные опоры.
Этому способствует навесное оборудование, которое можно быстро установить на такие машины. Они могут быстро передвигаться по обычным дорогам, обладают завидной проходимостью. Их оборудование в основном одинаково. Ковш спереди, экскаватор с обратной лопатой сзади и обязательные опоры.
Отличаются своими возможностями в зависимости от модели.Так, передний ковш может выполнять функции отвала или перегрузки различных грузов. Также может быть челюстной конструкции, что позволяет выполнять работу скребка, захватывать грузы и поднимать их. Возможности копания определяются конструкцией стрелы. Экскаваторы-погрузчики помимо выемки грунта могут выгружать его на определенную высоту.
Экскаваторы-погрузчики относятся к числу легких и мобильных экскаваторов. Итак Fiat-Hitachi FB 100 с двигателем мощностью 97 л.с. может выполнять любую работу, расходуя при этом 4 литра топлива в час.
Экскаватор-погрузчик Fiat-Hitachi FB 100.2
Одним из самых распространенных был FB 110 массой 7,7 тонны. При мощности силовой установки 112 л.с. он может копать ковшом 0,76 м3 на глубину 6,1 м. Используя погрузочный ковш вместимостью 1,1 м3, он способен выгружать грунт на высоту 2,7 м. Компактность этой машины с габаритами 5,7х2,4х3,9 м позволяет ей не только свободно передвигаться по дорогам, но и работать в ограниченном пространстве.
При мощности силовой установки 112 л.с. он может копать ковшом 0,76 м3 на глубину 6,1 м. Используя погрузочный ковш вместимостью 1,1 м3, он способен выгружать грунт на высоту 2,7 м. Компактность этой машины с габаритами 5,7х2,4х3,9 м позволяет ей не только свободно передвигаться по дорогам, но и работать в ограниченном пространстве.
Экскаватор-погрузчик Fiat-Hitachi FB 110
9-тонные экскаваторы-погрузчики Fiat-Hitachi FB 200 и FB 200 4WS обладают уникальными характеристиками.Эти двухковшовые полноприводные машины тоже способны передвигаться как крабы. С задним ковшом объемом 0,3 м3 на телескопической стреле FB200 может копать на глубину до 7 м. Передний ковш FB 200 4WS имеет челюстную форму. Он способен собрать до полутора кубометров грунта и высыпать его в кузов большого грузовика. Восьмитонный Fiat-Hitachi FB 90 с кубическим ковшом может копать почти пять метров в глубину и шесть метров в длину.
О самых маленьких экскаваторах
Малые экскаваторы Fiat-Hitachi принято называть мини-экскаваторами за их компактность и относительно небольшой вес, который не превышает полутора десятков тонн. Они существенно отличаются от других машин по габаритам и массе четырнадцатитонных Fiat-Hitachi EX 135 и EX 100, которые весят 13,5 т с ковшом 0,3-0,35 м3.
Они существенно отличаются от других машин по габаритам и массе четырнадцатитонных Fiat-Hitachi EX 135 и EX 100, которые весят 13,5 т с ковшом 0,3-0,35 м3.
Fiat-Hitachi EX 135
Fiat-Hitachi FH 120 массой 12,6 т и ковшом более полкуба. К малым машинам относятся десятитонные FH 90 W, а также FH 75 и FH 40, которые весят 8 и 4 тонны соответственно. У них меньший объем ковша и двигатели меньшей мощности.Это самые маленькие из малогабаритных экскаваторов этой марки. Хорошие отзывы о работе Fiat-Hitachi FH 45.2 plus. Компактные экскаваторы имеют легкую и очень прочную опорную раму, низкий центр тяжести, высокую удельную мощность. Надежные автоматические тормоза поворотного круга, самосмазывающаяся система шарниров рабочих механизмов.
Чем оснащаются
Экскаваторы Fiat-Hitachi обычно имеют американские дизельные двигатели Cummins, которыми также комплектуются бронетехника и тягачи.Силовые установки отвечают всем современным требованиям и отличаются:
- усовершенствованной системой впрыска топлива;
- сильный крутящий момент при невысокой скорости;
- система турбонаддува;
- автоматическое снижение числа оборотов при падении нагрузки;
- всепогодный запуск и плавная работа.

Гидравлические системы экскаваторов работают плавно и быстро, обеспечивая высокую производительность. Решающую роль здесь играют мощные, простые в эксплуатации гидравлические насосы.Они имеют прочные гидроцилиндры и хорошую систему фильтрации гидравлического масла. В случае перегрузки гидравлики она может автоматически блокироваться.
Полноприводная трансмиссия колесных машин с надежными тормозами обеспечивает их устойчивое движение. Этому, а также снижению давления на грунт способствуют сдвоенные колеса на обеих осях экскаваторов.
Колесные и гусеничные экскаваторы Fiat-Hitachi оснащены ковшами с прямой и обратной лопатой, гидромолотами, рыхлителями, грейферами и другим навесным оборудованием с гидравлическим приводом.
Машины обладают необходимым комфортом для удобной и безопасной работы оператора. Их кабины имеют отличный круговой обзор. В случае опрокидывания машины имеется прочный металлический каркас, способный защитить человека. Вибрация почти не ощущается на его рабочем месте. Имеются системы вентиляции и кондиционирования. Есть хорошая шумо- и пылеизоляция. Очень удобная посадка. Эргономичные органы управления. Приборные панели информативны и имеют приятную подсветку. Рационально организованное освещение кабины и рабочих зон.
Имеются системы вентиляции и кондиционирования. Есть хорошая шумо- и пылеизоляция. Очень удобная посадка. Эргономичные органы управления. Приборные панели информативны и имеют приятную подсветку. Рационально организованное освещение кабины и рабочих зон.
Несмотря на прекращение производства экскаваторов Fiat-Hitachi, многие из них остаются востребованными. Своими высокими эксплуатационными характеристиками и надежностью они подтверждают правильность конструкторских решений, принятых при их создании.
УТВЕРЖДАЮ
Федеральное государственное автономное образовательное учреждение высшего профессионального образования Национальный исследовательский ядерный университет «МИФИ» (НИЯУ МИФИ)
Стриханов М.Н.
ОПИСАНИЕ ДОЛЖНОСТИ
слесарь
Подразделение «Релейные технологии»
1.Общие положения
1.1. Настоящая должностная инструкция определяет функционал, должностные обязанности, права и ответственность слесаря КИПиА подразделения «Релейные технологии» (далее — слесарь КИПиА) Национального исследовательского ядерного университета «МИФИ» (НИЯУ МИФИ) ( далее Учреждение).
1.2. На должность слесаря назначается лицо, отвечающее следующим требованиям по образованию и подготовке:
Особые условия при приеме на работу слесарем КИПиА:
1.3. Слесарь КИПиА должен знать:
1. 4. Инженер по КИПиА должен уметь:
4. Инженер по КИПиА должен уметь:
1. 5. Слесарь КИПиА назначается на должность и освобождается от должности приказом ректора Учреждения в соответствии с действующим законодательством Российской Федерации.
5. Слесарь КИПиА назначается на должность и освобождается от должности приказом ректора Учреждения в соответствии с действующим законодательством Российской Федерации.
1.6. Слесарь по КИПиА подчиняется ректору Учреждения и заведующему отделением «Релейные технологии»
2. Трудовые функции
3. Должностные обязанности


4.2. Повысить квалификацию, пройти переподготовку (переподготовку).
4.3. Вступать во взаимоотношения с подразделениями сторонних учреждений и организаций для решения вопросов, входящих в компетенцию слесаря КИПиА.
4.4. Участвовать в обсуждении вопросов, входящих в его функциональные обязанности.
4.5. Вносить предложения и замечания по улучшению деятельности в закрепленном направлении работы.
4.6. Обращаться в соответствующие органы местного самоуправления или в суд для разрешения споров, возникающих при исполнении должностных обязанностей.
4.7. Использовать информационные материалы и юридические документы, необходимые для выполнения своих обязанностей.
4.8. Пройти аттестацию в установленном порядке.
5. Ответственность
Инженер по КИПиА ответственный за:
5.1. Невыполнение (ненадлежащее исполнение) своих функциональных обязанностей.
5.2. Невыполнение приказов и указаний ректора Учреждения.
5.3. Недостоверная информация о статусе выполнения поставленных задач и поручений, нарушение сроков их выполнения.
5.4. Нарушение правил внутреннего трудового распорядка, правил пожарной безопасности и техники безопасности, установленных в Учреждении.
5.5. Причинение материального ущерба в пределах, установленных действующим законодательством Российской Федерации.
5.6. Разглашение сведений, ставших известными в связи с исполнением служебных обязанностей.
За указанные нарушения слесарь может быть привлечен к дисциплинарной, материальной, административной, гражданско-правовой и уголовной ответственности в соответствии с действующим законодательством в зависимости от тяжести проступка.
Настоящая должностная инструкция разработана в соответствии с положениями (требованиями) Трудового кодекса Российской Федерации от 30 декабря 2001 г.