ЭКСПЛУАТАЦИОННЫЕ ОСНОВЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ. Основы телемеханики и автоматики
ОСНОВЫ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ
ОСНОВЫ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ
И ТЕЛЕМЕХАНИКИ
Учебное пособие для студентов специальности
«Автоматика, телемеханика и связь на железнодорожном транспорте»
Рекомендовано учебно-методическим объединением в качестве учебного пособия для вузов железнодорожного транспорта
Самара 2006
УДК 656.25
П49
Рецензенты:
Заместитель руководителя Департамента автоматики и
телемеханики ОАО «РЖД»
В.Н. Новиков
Доктор техн. наук, профессор, зав. кафедрой АСОИУ
Самарской государственной академии путей сообщения
О.А. Кацюба
Доктор техн. наук, профессор кафедры
«Автоматики и телемеханики на железнодорожном транспорте»
Московского государственного университета
путей сообщения
П.Ф. Бестемьянов
Полевой Ю.И.
П49 Основы железнодорожной автоматики и телемеханики [Текст]: учебное пособие для вузов / Ю.И. Полевой – Самара : СамГАПС, 2006. – 100 с.: ил.; 21 см – Библиогр.: с. 91. – 150 экз. – ISBN 5-98941-014-Х
В учебном пособии изложены основы устройств автоматики и телемеханики применяемых в системах сигнализации, централизации и блокировки. Этот материал является фундаментом для освоения профилирующих дисциплин, где изучаются системы регулирования движения поездов на станциях и перегонах, маневровых передвижений и формирования составов на станциях.
Приводится материал по трем разделам: классификация и назначение систем железнодорожной автоматики, элементы систем железнодорожной автоматики и кабельные сети. Особое внимание уделено вопросам обеспечения безопасности движения поездов.
Предназначено для студентов специальности 190402 «Автоматика, телемеханика и связь на железнодорожном транспорте» в качестве учебного материала, а также может быть использовано при проведении практических занятий.
УДК 656.25
ISBN 5-98941-014-Х © СамГАПС, 2006
© Полевой Ю.И., 2006
ОГЛАВЛЕНИЕ
Перечень сокращений . . . . . . . . 4
Предисловие . . . . . . . . . . 5
Введение. . . . . . . . . . . 7
1. Системы железнодорожной автоматики и телемеханики . . 9
1.1..Классификация и назначение систем железнодорожной
автоматики и телемеханики . . . . . . . 9
Контрольные вопросы и задание . . . . . . 14
2. Элементы систем железнодорожной автоматики и телемеханики . 15
2.1. Электромагнитные реле . . . . . . . 15
2.1.1. Принцип действия реле и их классификация . . . 15
2.1.2. Реле постоянного тока . . . . . . . 21
2.1.2.1. Нейтральные реле . . . . . . . . 21
2.1.2.2. Поляризованные и импульсные реле . . . . 22
2.1.2.3. Комбинированные реле . . . . . . . 26
2.1.3. Реле переменного тока . . . . . . . 28
2.1.4. Трансмиттеры . . . . . . . . 31
2.1.5. Полупроводниковые и микропроцессорные элементы . . 34
2.1.5.1. Полупроводниковые приборы . . . . . 34
2.1.5.2. Микропроцессорные средства . . . . . 40
Контрольные вопросы и задание . . . . . . 47
2.2. Путевые устройства систем железнодорожной
автоматики и телемеханики . . . . . . 48
2.2.1. Светофорная сигнализация . . . . . . 48
2.2.1.1. Устройство и установка светофоров . . . . 48
2.2.1.2. Расстановка светофоров автоблокировки . . . . 51
2.2.1.3. Расстановка светофоров на станции . . . . 57
2.2.2. Стрелочные электроприводы . . . . . 60
2.2.3. Рельсовые цепи . . . . . . . . 63
2.2.3.1. Выполняемые функции и структурные схемы . . . 63
2.2.3.2. Режимы работы и основные требования . . . . 66
2.2.3.3. Схемы рельсовых цепей . . . . . . 71
2.2.3.4. Разветвленные рельсовые цепи . . . . . 77
2.2.3.5. Расчет рельсовой цепи . . . . . . . 80
Контрольные вопросы и задание . . . . . . 82
3. Кабельные сети . . . . . . . . . 84
3.1.Устройства кабельных сетей . . . . . . 84
Контрольные вопросы и задание . . . . . . 88
Заключение . . . . . . . . . . 89
Алфавитно-предметный указатель . . . . . . 90
Библиографический список . . . . . . . 91
Приложения . . . . . . . . . . 92
Перечень сокращений
АБ – автоматическая блокировка (автоблокировка).
АЗСР – автоматическое задание скорости роспуска.
АЛС – автоматическая локомотивная сигнализация.
АЛУ – арифметическое логическое (арифметико-логическое) устройство.
АПС – автоматическая переездная сигнализация.
АРС – автоматическое регулирование скорости.
ГАЦ – горочная автоматическая централизация.
ГПЗУ – горочное программно-задающее устройство.
Д – датчик.
ДК – диспетчерский контроль.
ДСШ – двухэлементное секторное (фазочуствительное) реле.
ДЦ – диспетчерская централизация.
ДШ – дешифратор.
ЗО – задающий орган.
ИО – исполнительный орган.
КПТШ – кодово-путевой трансмиттер штепсельный.
КС – канал связи.
МП – микропроцессор.
МТ – маятниковый трансмиттер.
ОЗУ – оперативное запоминающее устройство.
ОР – объект регулирования.
ОС – орган сравнения.
Пер – передатчик.
ПЗУ –постоянное запоминающее устройство.
Пр – приемник.
ПТЭ – правила технической эксплуатации.
РЦ – рельсовая цепь.
САР – система автоматического регулирования.
СМ – соединительная муфта.
СП – стрелочный (электро) привод.
СЦБ – сигнализация, централизация и блокировка.
ТГЛ – телеуправление горочным локомотивом.
ТС – телесигнализация.
ТУ – телеуправление.
УКМ – универсальная конечная муфта.
УПМ – универсальная промежуточная муфта.
ФОЖАТ – физические основы железнодорожной автоматики
и телемеханики.
Ш – шифратор.
ЭВМ – электронная вычислительная машина.
ЭОЖАТ – электрические основы железнодорожной автоматики
и телемеханики.
ЭЦ – электрическая централизация.
ПРЕДИСЛОВИЕ
В железнодорожных вузах Российской Федерации перед чтением профилирующих дисциплин вводится ознакомительный курс по специализации. В Самарской академии путей сообщения по специальности Автоматика телемеханика и связь читаются дисциплины Физические основы железнодорожной автоматики и телемеханики и связи (ФОЖАТС), Электрические основы железнодорожной автоматики и телемеханики (ЭОЖАТ), Электрические основы связи (ЭОС). Как показывает опыт, ознакомление с основами железнодорожной автоматики телемеханики и связи создает положительные предпосылки к осознанному выбору специализации и подготавливает базу к освоению основного материала. По упомянутым дисциплинам читается курс лекций, проводятся практические занятия и экскурсии на линейные объекты железнодорожного транспорта (посты электрической централизации линейно-аппаратные залы и т. п.).
Освоение материала затруднено тем, что в настоящее время издается мало учеников и учебных пособий по железнодорожной автоматике, телемеханике и связи. Имеющиеся в наличии учебники изданы в основном до 1990 года, и они морально и физически устарели. Кроме того, освоение материала по основам автоматики, телемеханики и связи предполагает изучение большего количества учебного материала в достаточно упрощенном виде. Таких учебников практически нет, и студенты вынуждены обращаться к основным учебникам, которые для первоначального освоения достаточно сложны.
Предлагаемое учебное пособие существенно облегчит освоение материала как студентам дневной формы обучения, так, что особенно важно, и заочной. Студенты заочной формы обучения, хотя в большинстве своем и работают по специальности, но имеют дело с одной-двумя системами, а про другие не имеют четкого представления.
Введение в учебный процесс дисциплин ФОЖАТС и ЭОЖАТ на Электротехническом факультете СамГАПС позволило осуществить двухуровневый (двухступенчатый) процесс обучения, что положительно сказалось на усвоении материала, улучшило выживаемость знаний, существенно снизило количество отстающих студентов.
Материалом для написания учебного пособия послужил накопленный опыт во время проведения занятий по упомянутым дисциплинам на дневном и заочном факультетах. Кроме того, был составлен ряд программ (перечень программ и регистрационные номера приведены в приложении) для работы студентов в компьютерном классе.
Пособие содержит три раздела с перечнем рекомендуемого библиографического материала, контрольные вопросы по разделам, упражнения с вариантами заданий в соответствии с шифром студента (для студентов заочной формы обучения), перечень сокращений, алфавитно-предметный указатель, библиографический список, приложения.
Отзывы и пожелания можно направлять по адресу: 443066, Самара, 1-ый Безымянный переулок, 18, СамГАПС, кафедра АТС.
С учетом полученных отзывов на кафедре АТС планируется издание еще одного учебного пособия по дисциплине ЭОЖАТ, которая является продолжением дисциплины ФОЖАТС.
В заключение хочу выразить глубокую признательность рецензентам В.Н. Новикову, О.А. Кацюбе, П.Ф. Бестемьянову за ценные предложения и оперативность при рецензировании пособия.
ВВЕДЕНИЕ
Ведущую роль по увеличению пропускной и провозной способности дорог, повышению перерабатывающей способности сортировочных горок, грузовых станций, сокращению времени оборота вагонов, увеличению скорости грузовых и пассажирских поездов при минимальных по сравнению с другими устройствами затратах играют устройства автоматики, телемеханики и связи, а также автоматизированные системы управления перевозками и технологическими процессами. Для регулирования движения поездов на перегоне широкое применение поручил комплекс устройств, в который входят: автоблокировка (АБ), автоматическая локомотивная сигнализация (АЛС), диспетчерский контроль (ДК).
Регулирование движения поездов на станциях производится средствами релейной электрической централизации (ЭЦ).
Большое распространение получила диспетчерская централизация (ДЦ) для телемеханического управления стрелками и сигналами ряда промежуточных станций с одного диспетчерского поста.
Формирование составов осуществляется на сортировочных станциях, оборудованных устройствами горочной автоматики (ГАЦ, АРС и др.).
До последнего времени практически все перечисленные устройства монтировались на реле первого класса надежности или кодовых реле. В последние десятилетия стали интенсивно внедряться микроэлектронные и микропроцессорные устройства железнодорожной автоматики и телемеханики. Разработка устройств на современной элементной базе предусматривает и совершенствование алгоритмов работы новых устройств многократно расширяющих функциональные возможности систем управления и контроля за движением поездов.
В учебном пособии изложены основы устройств автоматики и телемеханики, применяемых в системах сигнализации, централизации и блокировки (СЦБ). Эти основы являются фундаментом для освоения профилирующих дисциплин, где изучаются системы регулирования движения поездов на станциях и перегонах, регулирования маневровых передвижений и формирования составов на станциях.
В развитие устройств железнодорожной автоматики большей вклад внесли научно-исследовательские, проектные и учебные институты, заводы по производству аппаратуры железнодорожной автоматики, выдающиеся ученые старшего поколения и наши современники. Практически все устройства и системы железнодорожной автоматики отечественного производства.
Для успешного освоения основ железнодорожной автоматики и телемеханики чтение лекций и проведение практических занятий с выполнением расчетов и упражнений целесообразно сопровождать экскурсиями на линейные объекты железнодорожного транспорта, проведением занятий в компьютерных классах по программам, названия которых приведены в приложении.
В учебном пособии приводится материал по трем разделам: классификация и назначение систем железнодорожной автоматики, элементы систем железнодорожной автоматики и кабельные сети. Особое внимание уделено вопросам обеспечения безопасности движения поездов.
В последнее десятилетие релейно-контактные системы, предназначенные для регулирования движения поездов, вытесняются микропроцессорными системами, а также путевыми датчиками на основе тональных и адаптивных рельсовых цепей, имеющих более высокую надежность и способных работать в условиях пониженного сопротивления изоляции. В учебном пособии приводится материал для ознакомления с простейшим микропроцессором.
Задание
Запустить на персональном компьютере (ПК) программу 1 (см. приложение 7) и ознакомиться с ее действием.
Электромагнитные реле
Таблица 2.1
Условные обозначения реле
Рассмотренная выше система обозначений выдерживается не для всех типов реле. Например, у огневых и аварийных реле первая буква указывает на назначение реле: ОМШ2-40 — огневое малогабаритное штепсельное четырехконтактное с сопротивлением обмоток 40 Ом; АШ2-110/220 — аварийное штепсельное четырехконтактное на номинальное напряжение 110 и 220 В. У нейтрального реле типа РЭЛ буквы в обозначении указывают: реле электромагнитное разработки Ленинградского электромеханического завода.
Условные графические обозначения реле в электрических схемах приведены в табл. 2.1.
Реле в защитном кожухе изготовляют для работы при температуре окружающей среды от —50 до +60 °С и относительной влажности до 90 % (при температуре +20 °С), а открытые реле, предназначенные для установки в релейных блоках, — при температуре окружающей среды от +5 до +35 °С и относительной влажности до 80% (при температуре +20°С).
Реле постоянного тока
Нейтральные реле
Электромагнитные реле постоянного тока получили наиболее широкое распространение, так как они просты по устройству и ненадежны в работе. Реле постоянного тока подразделяют на нейтральные, поляризованные и комбинированные.
Нейтральные реле не реагируют на направление тока в обмотке (нейтральны к полярности тока). Якорь нейтрального реле притягивается, переключая контакты при любой полярности тока в обмотках. После выключения тока якорь возвращается в исходное состояние. Таким образом, нейтральное реле является двухпозиционным.
Электромагнитная система нейтрального малогабаритного реле типа НМШ (рис. 2.3) состоит из сердечника 1 с двумя катушками 2, Г-образного ярма 3 и якоря 4 с противовесом.
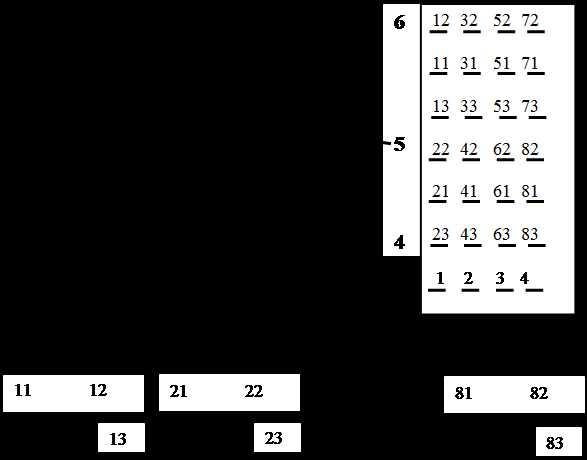
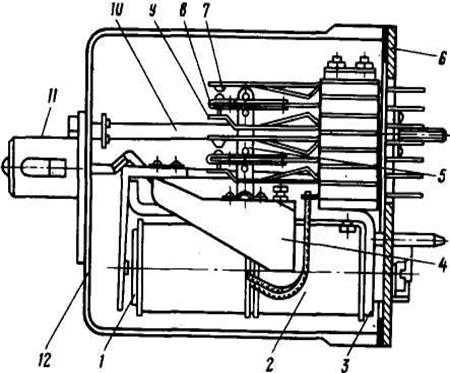
Рис. 2.3. Конструкция и нумерация контактов реле
Бронзовый упор на якоре исключает его залипание, так как препятствует касанию якоря в притянутом положении к полюсу сердечника. Якорь двумя тягами 5 управляет контактной системой. Фронтовые контакты 7 изготовляют из графита с серебряным наполнением, аобщие 8 и тыловые 9 - из серебра. Контактирующий материал помещается на концы контактных пружин. Сочетание контактов графит-серебро исключает возможность сваривания фронтовых контактов с общими при пропускании по ним тока.
При отсутствии тока в обмотках реле якорь под действием силы тяжести противовеса находится в опущенном положении, общие контакты замыкаются с тыловыми. При прохождении тока через обмотки реле намагничивается сердечник, магнитные силовые линии замыкаются через воздушный зазор и якорь, который притягивается к сердечнику. Тяга перемещается вверх, размыкая тыловые и замыкая общие контакты с фронтовыми. Концы контактных пружин, через основание 6 выведенные наружу, образуют штепсельную розетку. Реле закрывается прозрачным кожухом 12 с ручкой 11. Кожух крепится к основанию реле затяжным винтом 10. Для включения реле в схему выведенные наружу контакты вставляют в гнезда штепсельной розетки, к лепесткам которой припаивают монтажные провода.
Шпули катушек нормально действующих реле изготовляют из фенопласта, а медленнодействующих из красной меди. За счет медных шпулей достигается замедление на отпускание якоря до 0,2 с. Для увеличения замедления до 0,6 с на месте первой катушки, расположенной у основания, устанавливают сплошную медную гильзу.
Расположение и нумерация контактов реле типов НМШ1 и НМШМ1 приведены на рис. 2.3.
Первая катушка подключается к выводам 1 и 3, вторая, помещенная со стороны якоря,— к выводам 2 и 4. Катушки могут включаться раздельно, последовательно и параллельно.
Фронтовые (ф) и тыловые (т) контакты, работающие с одним общим контактом (о), образуют контактную группу или тройник. Реле типов НМШ1 и НМШМ1 имеют восемь контактных групп и обозначаются 8 фт. Номер каждого контакта нейтрального реле составляют из двух цифр, первая из которых указывает номер контактной группы, а вторая — тип контакта. Все цифровые обозначения общих контактов оканчиваются цифрой 1, фронтовые — 2 и тыловые —3. Например, номер 72 обозначает, что это фронтовой контакт седьмой группы, 71—общий контакт, 73—тыловой контакт. Контакты рассчитаны на переключение цепей при токе нагрузки до 2 А. Выводы от обмоток подключаются к выводам 1-3 и 2-4 (см. рис. 2.3). При последовательном включении обмоток соединяют перемычкой выводы 2-3, а при параллельном — 1-2 и 3-4.
Комбинированные реле
Комбинированные реле представляют собой сочетание нейтрального и поляризованного реле с общей магнитной системой. Они имеют нейтральный и поляризованный якоря. При прохождении через обмотки тока любой полярности нейтральный якорь притягивается, в результате чего замыкаются управляемые им фронтовые контакты. Переключение поляризованного якоря и замыкание управляемых им контактов происходят в зависимости от полярности тока, протекающего через обмотки.
Комбинированное реле является трехпозиционным, так как оно может находиться в трех различных состояниях: без тока, возбуждено током прямой или обратной полярности.
Электромагнитная система комбинированного малогабаритного штепсельного реле КМШ (рис. 2.7) состоит из двух катушек 1, надетых на сердечник 2 с ярмом 3; нейтрального якоря 6; постоянного магнита 4 и поляризованного якоря 5. Нейтральный и поляризованный якоря управляют связанными с ними контактами посредством изолирующих планок 7 и 8. Если ток в обмотках реле отсутствует, то нейтральный якорь, не связанный с потоком постоянного магнита, находится в отпущенном положении; его общие контакты замкнуты с тыловыми контактами. При протекании по обмоткам тока любого направления нейтральный якорь притягивается, и его общие контакты замыкаются с фронтовыми. Таким образом, нейтральный якорь комбинированного реле действует так же, как и якорь обычного нейтрального реле.
Поляризованный якорь управляется магнитным потоком постоянного магнита и потоком, создаваемым обмотками катушек. При отсутствии тока в обмотках поляризованный якорь находится в одном из крайних положений (на рис. 2.7 в левом). Магнитный поток постоянного магнита разветвляется по двум параллельным ветвям в виде потоков ФП1 и ФП2. Благодаря меньшему воздушному зазору слева поток ФП1 превышает поток Ф П2 на ΔФП, удерживая якорь в левом положении.
При пропускании тока через обмотки катушек создается магнитный поток ФК, замыкающийся через сердечник по двум параллельным ветвям: через нейтральный и поляризованный якоря. Нейтральный якорь под действием этого потока притягивается. Поток постоянного магнита ФП2 и поток, создаваемый обмоткой катушки ФК, складываются с правой стороны и вычитаются с левой. Усилие, создаваемое суммарным потоком ФП2+ФК, превышает усилие, создаваемое с левой стороны потоком ФП1–ФК, поэтому поляризованный якорь переключается в правое положение, замыкая общие контакты поляризованного якоря с переведенными.
После выключения тока поляризованный якорь остается в правом положении, так как теперь благодаря уменьшению воздушного зазора справа и увеличению слева поток ФП2 будет превышать поток ФП1 на ΔФП. Усилие, создаваемое потоком ΔФП, будет удерживать поляризованный якорь в правом положении. Для того чтобы поляризованный якорь перебросился в первоначальное (левое) положение, необходимо через обмотки реле пропустить ток другого направления. Таким образом, в комбинированном реле, как и в поляризованном, осуществляется сравнение двух потоков: постоянного магнита и потока, создаваемого катушками при пропускании по ним тока. В одном из сердечников в зависимости от направления тока в катушках эти потоки складываются, а в другом вычитаются. Поляризованный якорь переключается в сторону сердечника, в котором складываются магнитные потоки.
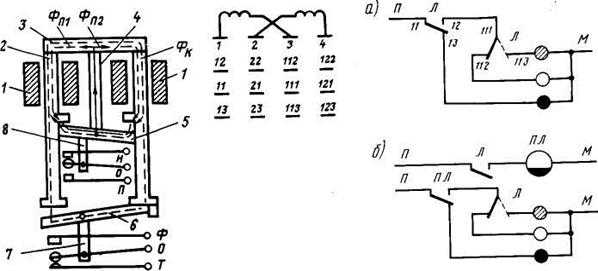 |
Рис. 2.7. Схема и нумерация Рис. 2.8. Схема управления
…контактов комбинированного реле КМШ огнями трехзначного светофора
Зазор между нейтральным якорем и полюсами обеспечивается упорным штифтом на якоре. Таким же образом обеспечивается зазор между полюсами и поляризованным якорем.
Контактная система реле (см. рис. 2.7) состоит из двух контактных групп на переключение 2 фт, управляемых нейтральным якорем, и двух контактных групп на переключение 2 нп, управляемых поляризованным якорем. Контактирующие части подвижных пружин поляризованного и нейтрального якорей и тыловых пружин нейтрального якоря изготовлены из серебра, контактирующие части остальных контактов графито-серебряные. Контактная система рассчитана на переключение электрических цепей постоянного тока 2 А при напряжении 24 В или цепей переменного тока 0,5 А при напряжении 220 В.
Всем комбинированным реле присущ недостаток, заключающийся в том, что при изменении полярности тока в обмотках изменяется направление магнитного потока, и в момент его прохождения через нулевое значение реле отпускает нейтральный якорь. Этот недостаток ограничивает область применения комбинированных реле. Если использовать комбинированное реле для управления огнями трехзначного светофора (рис. 2.8, а), то при смене желтого огня на зеленый или наоборот происходит проблеск красного огня на светофоре. В этой схеме при отсутствии тока в обмотках реле (блок-участок занят) нейтральный якорь находится в отпущенном положении, замкнуты его контакты 11-13, на светофоре горит красный огонь.
При свободности одного блок-участка линейное реле (в качестве которого использовано комбинированное реле) возбуждается током обратной полярности, замыкаются контакты 11-12нейтрального и 111-113поляризованного якорей. На светофоре загорается лампа желтого огня. После освобождения второго блок-участка в линейном реле меняется полярность тока с обратной на прямую. Поляризованный якорь перебрасывается и замыкаются его контакты 111-112. На светофоре загорается зеленый огонь. Однако при изменении полярности тока в обмотках и магнитного потока в сердечниках в момент его прохождения через нулевое значение реле кратковременно отпускает нейтральный якорь, замыкается тыловой контакт и на светофоре кратковременно появляется красный огонь, а затем нейтральный якорь притягивается, замыкается фронтовой контакт и загорается зеленый огонь. Таким образом, смена желтого огня на зеленый происходит через красный огонь, т. е. появляется проблеск красного огня, что недопустимо, так как машинист, увидев непонятный сигнал, остановит поезд. Аналогичная ситуация создается и при обратной смене сигнала — с зеленого на желтый.
Исключить этот недостаток схемным способом замедления на отпускание (например, с помощью конденсаторов) не представляется возможным, так как при смене полярности тока прохождение его через нулевое значение неизбежно.
Для устранения указанного недостатка в схему управления огнями светофора включается не контакт нейтрального якоря линейного комбинированного реле, а контакт его повторителя ПЛ (рис. 2.8, б). Последний имеет замедление на отпускание якоря и при кратковременном отпускании нейтрального якоря реле Л удерживает якорь притянутым и проблеска красного огня не происходит.
Комбинированные реле в части работы нейтрального якоря и связанных с ним контактов отвечают требованиям, предъявляемым к реле I класса надежности. Правильную работу контактов поляризованного якоря необходимо проверять схемным путем, так как в части работы поляризованного якоря комбинированные реле не отвечают требованиям реле I класса надежности.
Реле переменного тока
В устройствах железнодорожной автоматики и телемеханики применяют реле переменного тока: двухэлементные секторные реле ДСШ, используемые в основном в качестве путевых реле. Для контроля целостности нитей светофорных ламп применяют нейтральные реле постоянного тока с выпрямителями ОМШ, для переключения питания устройств на резервный источник предназначены аварийные реле АОШ, АПШ и АСШ.
Двухэлементные штепсельные реле переменного тока ДСШ широко применяют как путевые реле в рельсовых цепях переменного тока 50 и 25 Гц. В метрополитенах применяют реле ДСШ-2 в качестве путевых и линейных реле. Реле ДСШ I класса надежности являются индукционными, работающими только от переменного тока.
Принцип действия двухэлементного реле основан на взаимодействии переменного магнитного потока одного элемента с током, индуцируемым в секторе переменным магнитным потоком другого элемента. В соответствии с законом электромагнитной индукции на проводник с током (сектор), помещенный в магнитное поле, действует сила, приводящая его в движение. Сектор реле поворачивается и переключает контакты. Сила, действующая на сектор, пропорциональна произведению токов местного и путевого элементов и зависит от угла сдвига фаз между ними.
Электромагнитная система реле ДСШ (рис. 2.9, а) имеет два элемента — местный и путевой. Местный элемент состоит из сердечника 1 и катушки 2. На сердечнике путевого элемента 3 помещена катушка 4. Между полюсами сердечников расположен алюминиевый сектор 5. Ток, проходящий по местной обмотке, образует совпадающий с ним по фазе магнитный поток ФМ, который индуцирует в секторе токи iМ , отстающие по фазе от потока ФМ на угол 90° (рис. 2.9, б). Под действием тока путевого элемента возникает магнитный поток ФП, индуцирующий в секторе токи iП.
Взаимодействие индуцированных токов iМ с магнитным потоком ФП создает вращающий момент M1, а токов iМс магнитным потоком ФМ — вращающий момент М2. Под действием суммарного вращающего момента М = М2 + М1 сектор перемещается вверх и замыкает фронтовые контакты. При выключении тока в путевой или местной обмотке сектор возвращается в исходное положение (вниз) под действием собственного веса. Поворот сектора ограничивается сверху и снизу роликами, которые для смягчения ударов могут перемещаться в направляющих их держателях.
Положительный вращающий момент и движение сектора вверх возможны только при определенном соотношении фаз между токами (напряжениями) путевого и местного элементов. Так как магнитные потоки ФП и Фм и индуцируемые ими в секторе токи iПи iМ пропорциональны токам путевого и местного элементов, вращающий момент пропорционален произведению токов путевого и местного элементов и зависит от угла сдвига фаз между ними:
M = IП I M sin (φ),
где φ — угол сдвига фаз IП и I M.
Наибольший вращающий момент реализуется при угле сдвига фаз между токами путевого и местного элементов, равном 90°.
Таким образом, токи и совпадающие с ними потоки путевого и местного элементов должны быть сдвинуты на угол 90°. Если бы катушки и сердечники путевого и местного элементов были одинаковы, то и опережающие ток напряжения UПи UМтакже были бы сдвинуты между собой на угол 90°. Однако из-за некоторого отличия характеристик катушек и сердечников путевого и местного элементов UМопережает по фазе IМ на 72°, a UПопережает по фазе IП на 65°. Поэтому напряжения UMи UП сдвинуты по фазе не на 90°, а на 97°.
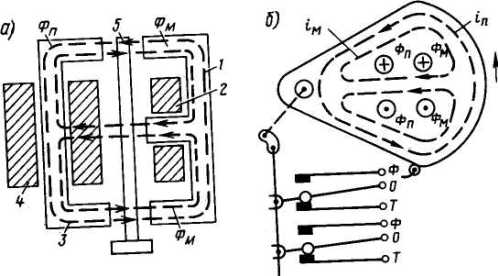
Рис. 2.9. Принципиальная схема реле ДСШ
Рис.2.10. Векторная диаграмма реле ДСШ
Практически для индукционных реле ДСШ обычно задается такой угол сдвига фаз между напряжением местного элемента и током путевого элемента, при котором реализуется максимальный вращающий момент.
Для реле ДСШ при частотах сигнального тока 50 и 25 Гц для реализации максимального вращающего момента необходимо, чтобы напряжение местной обмотки опережало ток путевой обмотки на угол (162±5)°. Этот угол называется идеальным углом сдвига фаз. Напомним, что угол сдвига фаз между токами и магнитными потоками путевого и местного элементом составляет при этом 90°.
Идеальные фазовые соотношения характеризуются следующими углами сдвига фаз (рис. 2.10): 900 между токами и магнитными потоками путевого и местного элементов; 162° между током путевого и напряжением местного элементов; 97° между напряжениями путевого и местного элементов.
Если фазовые соотношения отличаются от идеальных, то для обеспечения работы реле и получения необходимого вращающего момента требуется увеличить напряжение UПна обмотке путевого элемента до величины:
,
где φИ и φД — идеальный и действительный фазовые углы.
Приведенная формула верна при φИ>φД и φИ<φД, так как функция сos.φ одинакова при положительном и отрицательном углах.
Практически в условиях эксплуатации угол расстройки не должен превышать 25—30°. При отклонении угла расстройки на ±30° вращающий момент изменяется незначительно. Так как cos.30°=0,867, то требуется увеличение напряжения на путевой обмотке на 13—14% по сравнению со случаем идеальных фазовых соотношений. При дальнейшей расстройке функции соs(φИ – φД) изменяется более резко, рельсовая цепь работает неустойчиво, так как дальнейшие незначительные возрастания расстройки приводят к заметному снижению вращающего момента и силы подъема сектора. При расстройке 60° требуется увеличить напряжение на путевой обмотке в два раза.
Трансмиттеры
Маятниковый трансмиттер МТ-1 применяют для импульсного питания рельсовых цепей постоянного тока. Он вырабатывает импульсы тока с интервалами между ними: длительность импульсов и интервалов одинакова и равна 0,3 с.
Основными частями маятникового трансмиттера (рис. 2.11) являются электромагнитная система, ось с шайбами и маятником и контактная система. Электромагнитная система состоит из двух сердечников 1 с полюсными наконечниками, между которыми помещен якорь 2. На ось якоря насажены маятник 3 и гетинаксовые шайбы 4, 5 и 6, которые переключают контакты. На сердечники помещены катушки К1 и К2. Якорь насажен на ось так, чтобы в спокойном положении маятника ось якоря не совпадала с магнитной осью M1 и М2. В этом положении кулачковой шайбой 4 замкнут управляющий контакт УК. При включении тока якорь 2 под действием магнитного поля поворачивается против часовой стрелки, стремясь занять положение по оси М1-М2. Вместе с якорем поворачиваются маятник и кулачковые шайбы 4, 5 и 6. Управляющий контакт при этом размыкается и размыкает цепь питания обмоток. Маятник по инерции продолжает замедленное движение за счет запасенной кинетической энергии, затем под действием силы тяжести маятник вместе с осью и якорем начинает движение в обратном направлении. Проходя исходное (среднее) положение, шайба 4 замыкает контакт УК, включая обмотку. Однако маятник по инерции еще продолжает движение, затем движение возобновляется против часовой стрелки.
При прохождении якоря через среднее положение снова замыкаются контакты УК, и обмотки включаются. Якорь вместе с маятником получают дополнительное усилие. Таким образом, за счет энергии источника питания при каждом прохождении среднего положения маятник получает дополнительное ускоряющее усилие, устанавливаются незатухающие автоматические колебания. Трансмиттер МТ-1 совершает 95—115 колебаний в минуту. С такой же частотой замыкаются и размыкаются контакты 31-32 и 41-42. Через эти контакты в рельсовую цепь передаются импульсы тока. Трансмиттер МТ-2 имеет аналогичное устройство и отличается длительностью вырабатываемых импульсов и интервалов. Он совершает 40 + 2 колебаний в минуту, его контакт 31-32 замкнут и разомкнут в течение (0,75 + 0,1) с, а контакт 41-42 замкнут в течение (1+0,05) с, а разомкнут в течение (0,5 + 0,1) с. В положении покоя контакт 41-42 замкнут, а контакт 31-32 разомкнут. Трансмиттер МТ-2 применяют в схемах включения светофоров для обеспечения мигающего режима горения ламп. Маятниковые трансмиттеры рассчитаны для работы от источников постоянного тока напряжением 12 и 24 В.
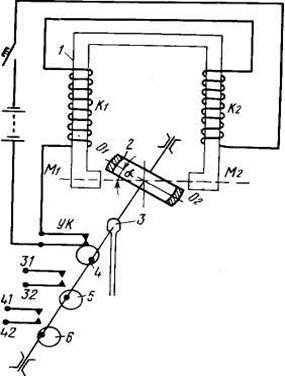
Рис. 2.11. Принципиальная схема маятникового трансмиттера МТ-1
Кодовые путевые трансмиттеры переменного тока КПТШ служат для образования кодовых сигналов, используемых в системах числовой кодовой автоблокировки и автоматической локомотивной сигнализации.
Трансмиттеры КПТШ-515 и КПТШ-715 используют в системе числовой кодовой автоблокировки и АЛСН переменного тока 50 Гц, КПТШ-815 и КПТШ-915 — при частоте сигнального тока 75 Гц. Продолжительность кодового цикла у трансмиттеров КПТШ-515 и КПТШ 815 составляет 1,6 с, а у трансмиттеров КПТШ-715 и КПТШ-915 — 1,86 с.
Основными частями трансмиттера являются однофазный асинхронный двигатель с короткозамкнутым ротором, редуктор, кулачковые шайбы и контактная система. Статор имеет две обмотки, смещенные в пространстве на угол 90°. Параллельно одной из обмоток у трансмиттеров, работающих от переменного тока 50 Гц, включен конденсатор емкостью 6 мкФ для расщепления фазы (у трансмиттеров, работающих от тока частотой 75 Гц, для этой же цели включен конденсатор емкостью 2 мкФ последовательно с обмоткой).
infopedia.su
Системы автоматики и телемеханики
Общие сведения о системах автоматики и телемеханики
Увеличение провозной и пропускной способностей железных дорог, повышение безопасности и интенсивности движения, грузовых и пассажирских поездов, обусловили необходимость создания специальных систем управления перевозочным процессом.
Отрасль науки и техники об автоматически действующих системах и устройствах носит название автоматики. При этом управление объектом и контроль его работы осуществляется в пределах сравнительно небольших расстояний. Для выполнения тех же функций на больших расстояниях применяются устройства телемеханики.
Телемеханика – отрасль науки и техники, которая охватывает теорию и технические средства контроля и управления различными объектами на расстоянии.
В автоматической системе все функции управления технологическим процессом, являющимся объектом управления, осуществляются без участия человека. Структурная схема такой системы показана на рисунке 1.
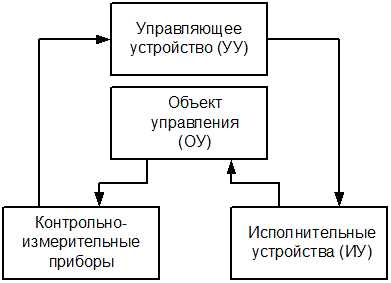
Рис. 1 Структурная схема автоматической системы управления
Основой управления является получение и обработка информации о состоянии объекта и внешних условий его работы, для определения воздействий, которые необходимо приложить к объекту, чтобы достичь цели управления.
В нашей схеме от объекта управления (ОУ) поступает информация о его состоянии. Для сбора этой информации применяют контрольно-измерительные приборы (КИП) – датчики, чувствительные элементы, различные измерительные приборы. Затем собранная информация поступает в управляющее устройство (УУ), там она обрабатывается. После обработки информации выясняется необходимость вмешательства в режим работы управляемого объекта и характер управляющих воздействий. Чтобы сделать вмешательство в режим работы управляемого объекта управляющее устройство выдает информацию, которая поступает к объекту управления и используется для изменения режима его работы с помощью исполнительных устройств (ИУ).
Если управляющее воздействие в результате переработки информации осуществляется с участием человека, систему управления называют автоматизированной. Примером системы автоматики на железнодорожном транспорте служит система электрической централизации, предназначенная для управления регулирования движения поездов на станции.
Если технологический процесс рассредоточен на большой площади, то информацию, собранную контрольно-измерительными приборами, необходимо передать в управляющее устройство, которое может располагаться на значительном расстоянии от исполнительных устройств. Такая передача информации называется телесигнализацией (ТС) или телеизмерением (ТИ) и осуществляется системой телемеханики (СТМ). Структурная схема телемеханической системы приведена на рисунке 2.
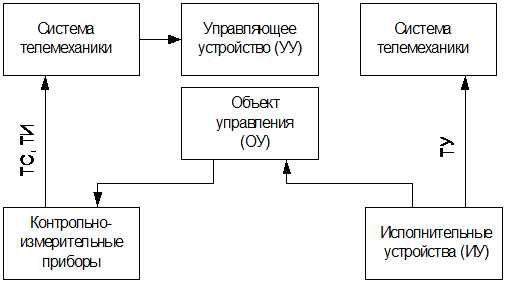
Рис. 2 Структурная схема телемеханической системы
В этой системе управление процессом возлагается на диспетчера, который по данным телесигнализации или телеизмерения принимает решения и в виде команд телеуправления (ТУ) передает их на исполнительные устройства, используя систему телемеханики. Примером таких систем на железнодорожном транспорте являются системы диспетчерской централизации.
Все системы автоматики и телемеханики являются системами переработки, передачи, воспроизведения, хранения и доставки информации.
Процесс обмена информации и ее переработка имеет очень сложный характер, и осуществляется в несколько этапов. Информация подвергается различным преобразованиям таким, как шифрование, перекодирование, запоминание.
Что же такое информация? В общем виде информацией считается совокупность сведений о событиях, объектах или явлениях. Для передачи и переработки информация представляется в некоторой форме с использованием различных знаков (символов). Совокупность знаков, содержащих ту или иную информацию, называют сообщением. Сообщение может иметь различное содержание, но всегда отображается в виде сигнала. Сигнал – средство передачи информации в пространстве и времени.
В системах железнодорожной автоматики и телемеханики обычно используются электрические сигналы (ток, напряжение). Сигналы формируются изменением (модуляцией) тех или иных параметров (амплитуды, фазы, частоты) по закону передаваемых сообщений.
Для обеспечения возможности извлечения сообщений из сигнала последний должен формироваться по определенным правилам. Построение сигнала по определенным правилам называется кодированием.
Сигнал – это функция времени. Если сигнал представляет собой функцию U(t), принимающую только определенные дискретные значения (например, 1 или 0) его называют дискретным. Таким же образом и сообщение, принимающее только некоторые дискретные значения, называют дискретным. Если же сообщение (сигнал) может принимать любые значения в некотором интервале времени, его называют непрерывным или аналоговым.
В современных системах автоматики и телемеханики используют дискретные сигналы, поэтому эти системы являются дискретными. В целом системы железнодорожной автоматики и телемеханики являются весьма сложными по структуре и содержат большое число дискретных устройств. Так управляющие устройства автоматики и телемеханики, а также электронных АТС представляют собой управляющие комплексы с использованием микропроцессоров и микро-ЭВМ.
Способы управления удаленными объектами
В зависимости от степени удаления объекта от пункта управления применяют три способа управления: местный, дистанционный и телемеханический.
При местном способе управления на пункте управления располагаются органы управления и источник энергии для питания объектов. На контролируемом пункте находятся управляемые объекты. Пункт управления и контролируемый пункт соединяются между собой линией связи (рис. 3)
Рис. 3 Схема местного способа управления
Достоинствами местного способа является его простота, а именно отсутствие какой-либо дополнительной (вспомогательной) аппаратуры. Этот способ называют еще прямопроводным управлением. Он отличается высокой надежностью по передачи информации и высокой помехоустойчивостью. Например, если выйдет из строя один канал связи (провод), то управление другими объектами не нарушится.
При местном способе производится центральное питание объектов. Это значит, что вся энергия, требуемая для включения объектов управления, передается по линии связи из центра управления. Поэтому у местного способа есть два значительных минуса: малая дальность управления (связана с потерями энергии в линии связи) и многопроводность (многоканальность). Именно из-за этого местный способ управления используется на малых расстояниях (10 – 100 м) при небольшом числе объектов (около 10 объектов).
В железнодорожной автоматике местный способ управления используют в системах ЭЦ с центральным питанием. Органы управления (стрелочные рукоятки, сигнальные кнопки) находятся на специальном пульте-табло на посту ЭЦ. Управляемые объекты (светофоры и стрелки) располагаются в горловине станции и связаны с постом ЭЦ кабелем.
Чтобы увеличить дальность управления используют дистанционный способ. При этом на контролируемом пункте в линию связи включаются дополнительные промежуточные линейные реле, через контакты которых производится управление двигателями. Центральный источник энергии осуществляет питания промежуточных реле, а управляемые объекты (двигатели) будут иметь местное питание от местного источника энергии. Такой способ дает возможность повысить дальность управления, поскольку по линейным проводам передается ток для включения реле, который примерно в тысячу раз меньше тока, потребляемого двигателями (рис.4).
Рис. 4 Схема дистанционного способа управления
Дистанционный способ кардинально отличается от местного тем, что в нем по линии связи осуществляется передача информация о том, какой объект надо включить, а не энергия для включения этого объекта. Однако эта информация не является кодированной и поэтому многоканальность, как недостаток в данном способе сохраняется. Дистанционный способ используется на средних расстояниях (100 км) при небольшом количестве объектов (10 объектов).
Данный способ используется в системах ЭЦ с местным питанием (рис. 5). При этом в горловине станции расположен релейный шкаф, в котором находятся промежуточные реле и другая аппаратура.
Рис. 5 Структурная схема ЭЦ с местным управлением
Чтобы избавиться от многоканальности как недостатка системы управления нужно закодировать передаваемую информацию (телемеханический способ управления). Он используется при достаточно больших расстояниях и значительном числе управляемых объектов. Главная цель телемеханического способа сделать, чтобы число каналов связи было намного меньше числа управляемых объектов. В большинстве случаев применяется только один канал связи. Дальность управления определяется чувствительностью и мощностью приемо-передающей аппаратуры и в принципе почти неограниченна.
В общем виде системы телемеханики содержат источник сообщений (ИС), кодирующее устройство (КУ), передатчик (ПЕР), линии связи (ЛС), приемник (ПР), декодирующее устройство (ДУ) и исполнительное устройство (ИУ) (рис. 6)
Рис. 6 Структурная схема телемеханического способа управления
Источник сообщения генерирует сообщение А, им могут быть контрольные реле или измерительные датчики (в системах ТС и ТИ), кнопки в пультах или управляющие устройства (в системах ТУ и ТР). Кодирующее устройство (кодер) формирует из сообщения А сигнал, который в передатчике преобразуется в вид, удобный для передачи по линиям связи – физической среде, по которой передаются сигналы. Такой средой может быть специальный электрический кабель, радиоканал, оптическое волокно, линия энергоснабжения. Приемник преобразует сигнал из линии связи в первоначальный вид, а декодирующее устройство (декодер) формирует из сигнала сообщение В, воздействующее на исполнительное устройство. Цель системы – эта передача сообщения от источника к получателю, будет считаться выполненной, если сообщение В, принятое получателем, полностью соответствует переданному сообщению А. При передаче от источника к получателю сообщение подвергается искажениям (под воздействием помех). Под помехой понимается постороннее возмущение в системе телемеханики, действие которого приводит к несоответствию передаваемого и принятого сообщений.
Классификация систем телемеханики
Телемеханические системы по роду выполняемых функций и характера передаваемой информации делятся на:
- системы телеуправления (ТУ), которые применяются для управления положением или состоянием дискретных и непрерывных объектов;
- системы телесигнализации (ТС), осуществляющие получение информации о состоянии контролируемых и управляемых объектов;
- системы телерегулирования (ТР), производят передачу из пункта управления управляемому объекту сигналов установки некоторых параметров, имеющих непрерывное множество состояний;
- системы телеизмерения (ТИ), осуществляют на расстоянии контроль значений различных параметров управляемых объектов;
- системы передачи данных (СПД) – обмен на расстоянии цифровой или другой информацией для использования ее в вычислительных или управляющих комплексах;
- комбинированные системы, объединяют некоторые из перечисленных систем в единый комплекс (системы ТР-ТИ, ТУ-ТС, ТУ-ТС-ТИ и другие).
Обычно в телемеханической системе имеется один пункт управления и множество контролируемых пунктов, которые соединены в телемеханическую сеть, которая представляет собой совокупность устройств системы телемеханики и объединяющих их каналов связи. Структура сети, показанная на рис.7,а, является простейшей, ее обычно называют «соединение пункт-пункт».
Более сложной является многоточечная структура телемеханической сети, которая имеет два и более контролируемых пункта. Наиболее распространенные структуры данного типа приведены на рис. 4,б,в,г,д. В радиальной структуре (рис. 7,б) пункт управления соединен с каждым из контролируемых пунктов отдельным каналом связи. Это обеспечивает независимость работы контрольных пунктов друг от друга при повреждении каналов связи. Такая структура используется на крупных станциях для телемеханического управления объектами в удаленных горловинах с помощью специальной системы станционной кодовой централизации.
В цепочной структуре (рис. 7,в) множество контролируемых пунктов соединяются с пунктом управления общим каналом связи. Это обеспечивает наиболее эффективное использование канала связи, но при этом возникают проблемы при повреждениях канала связи и проблемы регламентации работы контролируемых пунктов. Цепочная структура применяется в диспетчерских централизациях. Часто при организации крупных диспетчерских центров (например, в масштабах железной дороги) применяются комбинации из радиальной и цепочной структур (рис. 7,г). Для повышения надежности соединений в телемеханической сети применяют кольцевую структуру (рис. 4,д), в которой канал связи образует кольцо и передача сообщений между пунктом управления и каждым из контролируемых пунктов может осуществляться по двум направлениям. Кроме того, различают системы телемеханики для управления подвижными объектами: кранами и другими
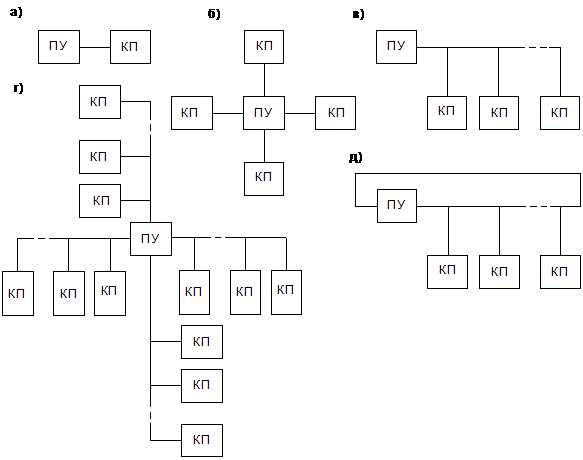
Рис. 7 Структуры телемеханических сетей
Передача сообщений между пунктом управления и контролируемыми пунктами организуется с помощью определенных правил – протоколов обмена. В системах железнодорожной телемеханики используют, в основном, четыре принципа обмена информацией и их сочетания. Спорадический принцип предполагает передачу только новой информации в момент ее возникновения (нажатие кнопки оператором, изменение состояния контролируемого объекта и т.д.). Его достоинством является минимальная загрузка каналов связи, но при этом возможна потеря информации из-за помех, сбоев и отказов аппаратуры.
При циклическом принципе осуществляется последовательное поочередное подключение к каналу связи всех контролируемых пунктов и выделение временного интервала для обмена информацией. Этот принцип требует синхронизации работы пункта управления и контролируемых пунктов. При использовании принципа «по запросу» вся текущая информация накапливается на контролируемых пунктах и передается только тогда, когда на данный контролируемый пункт поступает команда запроса из пункта управления. Принцип приоритета устанавливает неравноправие между различными контролируемыми пунктами, а также между различными сообщениями.
Для сравнения и оценки систем телемеханики используют следующие показатели:
- информационная емкость – число объектов управления и контроля, включенных в систему телемеханики;
- быстродействие системы – это промежуток времени с момента появления события на передающем пункте телемеханической системы до момента представления информации о нем на приемном пункте;
- достоверность передачи информации – вероятность потери или искажения информации. С этой точки зрения телемеханические комплексы делятся на три категории (табл.1).
Таблица 1
|
Вероятностная характеристика |
Вероятность события, не более, для категорий помещений |
||
|
|
1 |
2 |
3 |
|
Вероятность потери команды |
10-14 |
10-10 |
10-7 |
|
Вероятность потери контрольной информации |
10-8 |
10-7 |
10-6 |
|
Вероятность искажения команды |
10-14 |
10-10 |
10-7 |
|
Вероятность искажения контрольной информации |
10-8 |
10-7 |
10-6 |
vse-lekcii.ru
ОСНОВЫ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ
ОСНОВЫ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ
И ТЕЛЕМЕХАНИКИ
Учебное пособие для студентов специальности
«Автоматика, телемеханика и связь на железнодорожном транспорте»
Рекомендовано учебно-методическим объединением в качестве учебного пособия для вузов железнодорожного транспорта
Самара 2006
УДК 656.25
П49
Рецензенты:
Заместитель руководителя Департамента автоматики и
телемеханики ОАО «РЖД»
В.Н. Новиков
Доктор техн. наук, профессор, зав. кафедрой АСОИУ
Самарской государственной академии путей сообщения
О.А. Кацюба
Доктор техн. наук, профессор кафедры
«Автоматики и телемеханики на железнодорожном транспорте»
Московского государственного университета
путей сообщения
П.Ф. Бестемьянов
Полевой Ю.И.
П49 Основы железнодорожной автоматики и телемеханики [Текст]: учебное пособие для вузов / Ю.И. Полевой – Самара : СамГАПС, 2006. – 100 с.: ил.; 21 см – Библиогр.: с. 91. – 150 экз. – ISBN 5-98941-014-Х
В учебном пособии изложены основы устройств автоматики и телемеханики применяемых в системах сигнализации, централизации и блокировки. Этот материал является фундаментом для освоения профилирующих дисциплин, где изучаются системы регулирования движения поездов на станциях и перегонах, маневровых передвижений и формирования составов на станциях.
Приводится материал по трем разделам: классификация и назначение систем железнодорожной автоматики, элементы систем железнодорожной автоматики и кабельные сети. Особое внимание уделено вопросам обеспечения безопасности движения поездов.
Предназначено для студентов специальности 190402 «Автоматика, телемеханика и связь на железнодорожном транспорте» в качестве учебного материала, а также может быть использовано при проведении практических занятий.
УДК 656.25
ISBN 5-98941-014-Х © СамГАПС, 2006
© Полевой Ю.И., 2006
ОГЛАВЛЕНИЕ
Перечень сокращений . . . . . . . . 4
Предисловие . . . . . . . . . . 5
Введение. . . . . . . . . . . 7
1. Системы железнодорожной автоматики и телемеханики . . 9
1.1..Классификация и назначение систем железнодорожной
автоматики и телемеханики . . . . . . . 9
Контрольные вопросы и задание . . . . . . 14
2. Элементы систем железнодорожной автоматики и телемеханики . 15
2.1. Электромагнитные реле . . . . . . . 15
2.1.1. Принцип действия реле и их классификация . . . 15
2.1.2. Реле постоянного тока . . . . . . . 21
2.1.2.1. Нейтральные реле . . . . . . . . 21
2.1.2.2. Поляризованные и импульсные реле . . . . 22
2.1.2.3. Комбинированные реле . . . . . . . 26
2.1.3. Реле переменного тока . . . . . . . 28
2.1.4. Трансмиттеры . . . . . . . . 31
2.1.5. Полупроводниковые и микропроцессорные элементы . . 34
2.1.5.1. Полупроводниковые приборы . . . . . 34
2.1.5.2. Микропроцессорные средства . . . . . 40
Контрольные вопросы и задание . . . . . . 47
2.2. Путевые устройства систем железнодорожной
автоматики и телемеханики . . . . . . 48
2.2.1. Светофорная сигнализация . . . . . . 48
2.2.1.1. Устройство и установка светофоров . . . . 48
2.2.1.2. Расстановка светофоров автоблокировки . . . . 51
2.2.1.3. Расстановка светофоров на станции . . . . 57
2.2.2. Стрелочные электроприводы . . . . . 60
2.2.3. Рельсовые цепи . . . . . . . . 63
2.2.3.1. Выполняемые функции и структурные схемы . . . 63
2.2.3.2. Режимы работы и основные требования . . . . 66
2.2.3.3. Схемы рельсовых цепей . . . . . . 71
2.2.3.4. Разветвленные рельсовые цепи . . . . . 77
2.2.3.5. Расчет рельсовой цепи . . . . . . . 80
Контрольные вопросы и задание . . . . . . 82
3. Кабельные сети . . . . . . . . . 84
3.1.Устройства кабельных сетей . . . . . . 84
Контрольные вопросы и задание . . . . . . 88
Заключение . . . . . . . . . . 89
Алфавитно-предметный указатель . . . . . . 90
Библиографический список . . . . . . . 91
Приложения . . . . . . . . . . 92
Перечень сокращений
АБ – автоматическая блокировка (автоблокировка).
АЗСР – автоматическое задание скорости роспуска.
АЛС – автоматическая локомотивная сигнализация.
АЛУ – арифметическое логическое (арифметико-логическое) устройство.
АПС – автоматическая переездная сигнализация.
АРС – автоматическое регулирование скорости.
ГАЦ – горочная автоматическая централизация.
ГПЗУ – горочное программно-задающее устройство.
Д – датчик.
ДК – диспетчерский контроль.
ДСШ – двухэлементное секторное (фазочуствительное) реле.
ДЦ – диспетчерская централизация.
ДШ – дешифратор.
ЗО – задающий орган.
ИО – исполнительный орган.
КПТШ – кодово-путевой трансмиттер штепсельный.
КС – канал связи.
МП – микропроцессор.
МТ – маятниковый трансмиттер.
ОЗУ – оперативное запоминающее устройство.
ОР – объект регулирования.
ОС – орган сравнения.
Пер – передатчик.
ПЗУ –постоянное запоминающее устройство.
Пр – приемник.
ПТЭ – правила технической эксплуатации.
РЦ – рельсовая цепь.
САР – система автоматического регулирования.
СМ – соединительная муфта.
СП – стрелочный (электро) привод.
СЦБ – сигнализация, централизация и блокировка.
ТГЛ – телеуправление горочным локомотивом.
ТС – телесигнализация.
ТУ – телеуправление.
УКМ – универсальная конечная муфта.
УПМ – универсальная промежуточная муфта.
ФОЖАТ – физические основы железнодорожной автоматики
и телемеханики.
Ш – шифратор.
ЭВМ – электронная вычислительная машина.
ЭОЖАТ – электрические основы железнодорожной автоматики
и телемеханики.
ЭЦ – электрическая централизация.
ПРЕДИСЛОВИЕ
В железнодорожных вузах Российской Федерации перед чтением профилирующих дисциплин вводится ознакомительный курс по специализации. В Самарской академии путей сообщения по специальности Автоматика телемеханика и связь читаются дисциплины Физические основы железнодорожной автоматики и телемеханики и связи (ФОЖАТС), Электрические основы железнодорожной автоматики и телемеханики (ЭОЖАТ), Электрические основы связи (ЭОС). Как показывает опыт, ознакомление с основами железнодорожной автоматики телемеханики и связи создает положительные предпосылки к осознанному выбору специализации и подготавливает базу к освоению основного материала. По упомянутым дисциплинам читается курс лекций, проводятся практические занятия и экскурсии на линейные объекты железнодорожного транспорта (посты электрической централизации линейно-аппаратные залы и т. п.).
Освоение материала затруднено тем, что в настоящее время издается мало учеников и учебных пособий по железнодорожной автоматике, телемеханике и связи. Имеющиеся в наличии учебники изданы в основном до 1990 года, и они морально и физически устарели. Кроме того, освоение материала по основам автоматики, телемеханики и связи предполагает изучение большего количества учебного материала в достаточно упрощенном виде. Таких учебников практически нет, и студенты вынуждены обращаться к основным учебникам, которые для первоначального освоения достаточно сложны.
Предлагаемое учебное пособие существенно облегчит освоение материала как студентам дневной формы обучения, так, что особенно важно, и заочной. Студенты заочной формы обучения, хотя в большинстве своем и работают по специальности, но имеют дело с одной-двумя системами, а про другие не имеют четкого представления.
Введение в учебный процесс дисциплин ФОЖАТС и ЭОЖАТ на Электротехническом факультете СамГАПС позволило осуществить двухуровневый (двухступенчатый) процесс обучения, что положительно сказалось на усвоении материала, улучшило выживаемость знаний, существенно снизило количество отстающих студентов.
Материалом для написания учебного пособия послужил накопленный опыт во время проведения занятий по упомянутым дисциплинам на дневном и заочном факультетах. Кроме того, был составлен ряд программ (перечень программ и регистрационные номера приведены в приложении) для работы студентов в компьютерном классе.
Пособие содержит три раздела с перечнем рекомендуемого библиографического материала, контрольные вопросы по разделам, упражнения с вариантами заданий в соответствии с шифром студента (для студентов заочной формы обучения), перечень сокращений, алфавитно-предметный указатель, библиографический список, приложения.
Отзывы и пожелания можно направлять по адресу: 443066, Самара, 1-ый Безымянный переулок, 18, СамГАПС, кафедра АТС.
С учетом полученных отзывов на кафедре АТС планируется издание еще одного учебного пособия по дисциплине ЭОЖАТ, которая является продолжением дисциплины ФОЖАТС.
В заключение хочу выразить глубокую признательность рецензентам В.Н. Новикову, О.А. Кацюбе, П.Ф. Бестемьянову за ценные предложения и оперативность при рецензировании пособия.
ВВЕДЕНИЕ
Ведущую роль по увеличению пропускной и провозной способности дорог, повышению перерабатывающей способности сортировочных горок, грузовых станций, сокращению времени оборота вагонов, увеличению скорости грузовых и пассажирских поездов при минимальных по сравнению с другими устройствами затратах играют устройства автоматики, телемеханики и связи, а также автоматизированные системы управления перевозками и технологическими процессами. Для регулирования движения поездов на перегоне широкое применение поручил комплекс устройств, в который входят: автоблокировка (АБ), автоматическая локомотивная сигнализация (АЛС), диспетчерский контроль (ДК).
Регулирование движения поездов на станциях производится средствами релейной электрической централизации (ЭЦ).
Большое распространение получила диспетчерская централизация (ДЦ) для телемеханического управления стрелками и сигналами ряда промежуточных станций с одного диспетчерского поста.
Формирование составов осуществляется на сортировочных станциях, оборудованных устройствами горочной автоматики (ГАЦ, АРС и др.).
До последнего времени практически все перечисленные устройства монтировались на реле первого класса надежности или кодовых реле. В последние десятилетия стали интенсивно внедряться микроэлектронные и микропроцессорные устройства железнодорожной автоматики и телемеханики. Разработка устройств на современной элементной базе предусматривает и совершенствование алгоритмов работы новых устройств многократно расширяющих функциональные возможности систем управления и контроля за движением поездов.
В учебном пособии изложены основы устройств автоматики и телемеханики, применяемых в системах сигнализации, централизации и блокировки (СЦБ). Эти основы являются фундаментом для освоения профилирующих дисциплин, где изучаются системы регулирования движения поездов на станциях и перегонах, регулирования маневровых передвижений и формирования составов на станциях.
В развитие устройств железнодорожной автоматики большей вклад внесли научно-исследовательские, проектные и учебные институты, заводы по производству аппаратуры железнодорожной автоматики, выдающиеся ученые старшего поколения и наши современники. Практически все устройства и системы железнодорожной автоматики отечественного производства.
Для успешного освоения основ железнодорожной автоматики и телемеханики чтение лекций и проведение практических занятий с выполнением расчетов и упражнений целесообразно сопровождать экскурсиями на линейные объекты железнодорожного транспорта, проведением занятий в компьютерных классах по программам, названия которых приведены в приложении.
В учебном пособии приводится материал по трем разделам: классификация и назначение систем железнодорожной автоматики, элементы систем железнодорожной автоматики и кабельные сети. Особое внимание уделено вопросам обеспечения безопасности движения поездов.
В последнее десятилетие релейно-контактные системы, предназначенные для регулирования движения поездов, вытесняются микропроцессорными системами, а также путевыми датчиками на основе тональных и адаптивных рельсовых цепей, имеющих более высокую надежность и способных работать в условиях пониженного сопротивления изоляции. В учебном пособии приводится материал для ознакомления с простейшим микропроцессором.
Задание
Запустить на персональном компьютере (ПК) программу 1 (см. приложение 7) и ознакомиться с ее действием.
Электромагнитные реле
Таблица 2.1
Условные обозначения реле
Рассмотренная выше система обозначений выдерживается не для всех типов реле. Например, у огневых и аварийных реле первая буква указывает на назначение реле: ОМШ2-40 — огневое малогабаритное штепсельное четырехконтактное с сопротивлением обмоток 40 Ом; АШ2-110/220 — аварийное штепсельное четырехконтактное на номинальное напряжение 110 и 220 В. У нейтрального реле типа РЭЛ буквы в обозначении указывают: реле электромагнитное разработки Ленинградского электромеханического завода.
Условные графические обозначения реле в электрических схемах приведены в табл. 2.1.
Реле в защитном кожухе изготовляют для работы при температуре окружающей среды от —50 до +60 °С и относительной влажности до 90 % (при температуре +20 °С), а открытые реле, предназначенные для установки в релейных блоках, — при температуре окружающей среды от +5 до +35 °С и относительной влажности до 80% (при температуре +20°С).
Реле постоянного тока
Нейтральные реле
Электромагнитные реле постоянного тока получили наиболее широкое распространение, так как они просты по устройству и ненадежны в работе. Реле постоянного тока подразделяют на нейтральные, поляризованные и комбинированные.
Нейтральные реле не реагируют на направление тока в обмотке (нейтральны к полярности тока). Якорь нейтрального реле притягивается, переключая контакты при любой полярности тока в обмотках. После выключения тока якорь возвращается в исходное состояние. Таким образом, нейтральное реле является двухпозиционным.
Электромагнитная система нейтрального малогабаритного реле типа НМШ (рис. 2.3) состоит из сердечника 1 с двумя катушками 2, Г-образного ярма 3 и якоря 4 с противовесом.
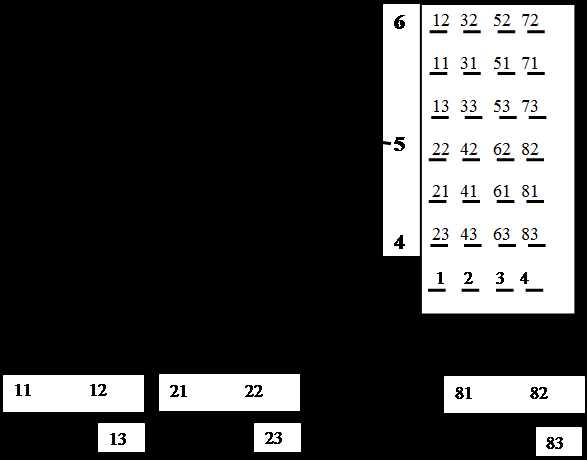
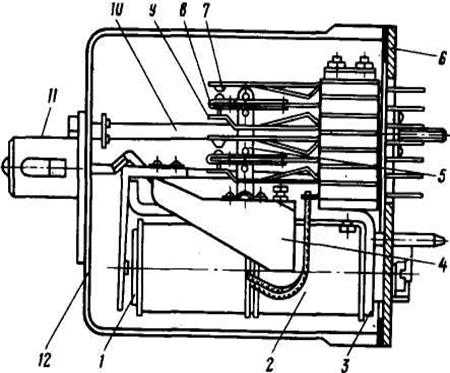
Рис. 2.3. Конструкция и нумерация контактов реле
Бронзовый упор на якоре исключает его залипание, так как препятствует касанию якоря в притянутом положении к полюсу сердечника. Якорь двумя тягами 5 управляет контактной системой. Фронтовые контакты 7 изготовляют из графита с серебряным наполнением, аобщие 8 и тыловые 9 - из серебра. Контактирующий материал помещается на концы контактных пружин. Сочетание контактов графит-серебро исключает возможность сваривания фронтовых контактов с общими при пропускании по ним тока.
При отсутствии тока в обмотках реле якорь под действием силы тяжести противовеса находится в опущенном положении, общие контакты замыкаются с тыловыми. При прохождении тока через обмотки реле намагничивается сердечник, магнитные силовые линии замыкаются через воздушный зазор и якорь, который притягивается к сердечнику. Тяга перемещается вверх, размыкая тыловые и замыкая общие контакты с фронтовыми. Концы контактных пружин, через основание 6 выведенные наружу, образуют штепсельную розетку. Реле закрывается прозрачным кожухом 12 с ручкой 11. Кожух крепится к основанию реле затяжным винтом 10. Для включения реле в схему выведенные наружу контакты вставляют в гнезда штепсельной розетки, к лепесткам которой припаивают монтажные провода.
Шпули катушек нормально действующих реле изготовляют из фенопласта, а медленнодействующих из красной меди. За счет медных шпулей достигается замедление на отпускание якоря до 0,2 с. Для увеличения замедления до 0,6 с на месте первой катушки, расположенной у основания, устанавливают сплошную медную гильзу.
Расположение и нумерация контактов реле типов НМШ1 и НМШМ1 приведены на рис. 2.3.
Первая катушка подключается к выводам 1 и 3, вторая, помещенная со стороны якоря,— к выводам 2 и 4. Катушки могут включаться раздельно, последовательно и параллельно.
Фронтовые (ф) и тыловые (т) контакты, работающие с одним общим контактом (о), образуют контактную группу или тройник. Реле типов НМШ1 и НМШМ1 имеют восемь контактных групп и обозначаются 8 фт. Номер каждого контакта нейтрального реле составляют из двух цифр, первая из которых указывает номер контактной группы, а вторая — тип контакта. Все цифровые обозначения общих контактов оканчиваются цифрой 1, фронтовые — 2 и тыловые —3. Например, номер 72 обозначает, что это фронтовой контакт седьмой группы, 71—общий контакт, 73—тыловой контакт. Контакты рассчитаны на переключение цепей при токе нагрузки до 2 А. Выводы от обмоток подключаются к выводам 1-3 и 2-4 (см. рис. 2.3). При последовательном включении обмоток соединяют перемычкой выводы 2-3, а при параллельном — 1-2 и 3-4.
Комбинированные реле
Комбинированные реле представляют собой сочетание нейтрального и поляризованного реле с общей магнитной системой. Они имеют нейтральный и поляризованный якоря. При прохождении через обмотки тока любой полярности нейтральный якорь притягивается, в результате чего замыкаются управляемые им фронтовые контакты. Переключение поляризованного якоря и замыкание управляемых им контактов происходят в зависимости от полярности тока, протекающего через обмотки.
Комбинированное реле является трехпозиционным, так как оно может находиться в трех различных состояниях: без тока, возбуждено током прямой или обратной полярности.
Электромагнитная система комбинированного малогабаритного штепсельного реле КМШ (рис. 2.7) состоит из двух катушек 1, надетых на сердечник 2 с ярмом 3; нейтрального якоря 6; постоянного магнита 4 и поляризованного якоря 5. Нейтральный и поляризованный якоря управляют связанными с ними контактами посредством изолирующих планок 7 и 8. Если ток в обмотках реле отсутствует, то нейтральный якорь, не связанный с потоком постоянного магнита, находится в отпущенном положении; его общие контакты замкнуты с тыловыми контактами. При протекании по обмоткам тока любого направления нейтральный якорь притягивается, и его общие контакты замыкаются с фронтовыми. Таким образом, нейтральный якорь комбинированного реле действует так же, как и якорь обычного нейтрального реле.
Поляризованный якорь управляется магнитным потоком постоянного магнита и потоком, создаваемым обмотками катушек. При отсутствии тока в обмотках поляризованный якорь находится в одном из крайних положений (на рис. 2.7 в левом). Магнитный поток постоянного магнита разветвляется по двум параллельным ветвям в виде потоков ФП1 и ФП2. Благодаря меньшему воздушному зазору слева поток ФП1 превышает поток Ф П2 на ΔФП, удерживая якорь в левом положении.
При пропускании тока через обмотки катушек создается магнитный поток ФК, замыкающийся через сердечник по двум параллельным ветвям: через нейтральный и поляризованный якоря. Нейтральный якорь под действием этого потока притягивается. Поток постоянного магнита ФП2 и поток, создаваемый обмоткой катушки ФК, складываются с правой стороны и вычитаются с левой. Усилие, создаваемое суммарным потоком ФП2+ФК, превышает усилие, создаваемое с левой стороны потоком ФП1–ФК, поэтому поляризованный якорь переключается в правое положение, замыкая общие контакты поляризованного якоря с переведенными.
После выключения тока поляризованный якорь остается в правом положении, так как теперь благодаря уменьшению воздушного зазора справа и увеличению слева поток ФП2 будет превышать поток ФП1 на ΔФП. Усилие, создаваемое потоком ΔФП, будет удерживать поляризованный якорь в правом положении. Для того чтобы поляризованный якорь перебросился в первоначальное (левое) положение, необходимо через обмотки реле пропустить ток другого направления. Таким образом, в комбинированном реле, как и в поляризованном, осуществляется сравнение двух потоков: постоянного магнита и потока, создаваемого катушками при пропускании по ним тока. В одном из сердечников в зависимости от направления тока в катушках эти потоки складываются, а в другом вычитаются. Поляризованный якорь переключается в сторону сердечника, в котором складываются магнитные потоки.
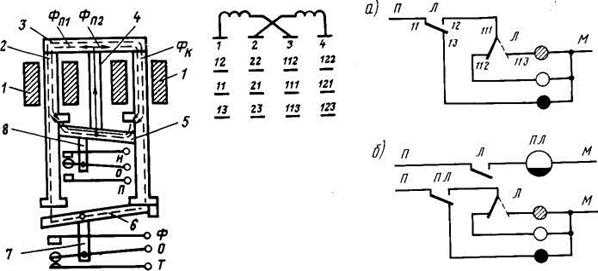 |
Рис. 2.7. Схема и нумерация Рис. 2.8. Схема управления
…контактов комбинированного реле КМШ огнями трехзначного светофора
Зазор между нейтральным якорем и полюсами обеспечивается упорным штифтом на якоре. Таким же образом обеспечивается зазор между полюсами и поляризованным якорем.
Контактная система реле (см. рис. 2.7) состоит из двух контактных групп на переключение 2 фт, управляемых нейтральным якорем, и двух контактных групп на переключение 2 нп, управляемых поляризованным якорем. Контактирующие части подвижных пружин поляризованного и нейтрального якорей и тыловых пружин нейтрального якоря изготовлены из серебра, контактирующие части остальных контактов графито-серебряные. Контактная система рассчитана на переключение электрических цепей постоянного тока 2 А при напряжении 24 В или цепей переменного тока 0,5 А при напряжении 220 В.
Всем комбинированным реле присущ недостаток, заключающийся в том, что при изменении полярности тока в обмотках изменяется направление магнитного потока, и в момент его прохождения через нулевое значение реле отпускает нейтральный якорь. Этот недостаток ограничивает область применения комбинированных реле. Если использовать комбинированное реле для управления огнями трехзначного светофора (рис. 2.8, а), то при смене желтого огня на зеленый или наоборот происходит проблеск красного огня на светофоре. В этой схеме при отсутствии тока в обмотках реле (блок-участок занят) нейтральный якорь находится в отпущенном положении, замкнуты его контакты 11-13, на светофоре горит красный огонь.
При свободности одного блок-участка линейное реле (в качестве которого использовано комбинированное реле) возбуждается током обратной полярности, замыкаются контакты 11-12нейтрального и 111-113поляризованного якорей. На светофоре загорается лампа желтого огня. После освобождения второго блок-участка в линейном реле меняется полярность тока с обратной на прямую. Поляризованный якорь перебрасывается и замыкаются его контакты 111-112. На светофоре загорается зеленый огонь. Однако при изменении полярности тока в обмотках и магнитного потока в сердечниках в момент его прохождения через нулевое значение реле кратковременно отпускает нейтральный якорь, замыкается тыловой контакт и на светофоре кратковременно появляется красный огонь, а затем нейтральный якорь притягивается, замыкается фронтовой контакт и загорается зеленый огонь. Таким образом, смена желтого огня на зеленый происходит через красный огонь, т. е. появляется проблеск красного огня, что недопустимо, так как машинист, увидев непонятный сигнал, остановит поезд. Аналогичная ситуация создается и при обратной смене сигнала — с зеленого на желтый.
Исключить этот недостаток схемным способом замедления на отпускание (например, с помощью конденсаторов) не представляется возможным, так как при смене полярности тока прохождение его через нулевое значение неизбежно.
Для устранения указанного недостатка в схему управления огнями светофора включается не контакт нейтрального якоря линейного комбинированного реле, а контакт его повторителя ПЛ (рис. 2.8, б). Последний имеет замедление на отпускание якоря и при кратковременном отпускании нейтрального якоря реле Л удерживает якорь притянутым и проблеска красного огня не происходит.
Комбинированные реле в части работы нейтрального якоря и связанных с ним контактов отвечают требованиям, предъявляемым к реле I класса надежности. Правильную работу контактов поляризованного якоря необходимо проверять схемным путем, так как в части работы поляризованного якоря комбинированные реле не отвечают требованиям реле I класса надежности.
Реле переменного тока
В устройствах железнодорожной автоматики и телемеханики применяют реле переменного тока: двухэлементные секторные реле ДСШ, используемые в основном в качестве путевых реле. Для контроля целостности нитей светофорных ламп применяют нейтральные реле постоянного тока с выпрямителями ОМШ, для переключения питания устройств на резервный источник предназначены аварийные реле АОШ, АПШ и АСШ.
Двухэлементные штепсельные реле переменного тока ДСШ широко применяют как путевые реле в рельсовых цепях переменного тока 50 и 25 Гц. В метрополитенах применяют реле ДСШ-2 в качестве путевых и линейных реле. Реле ДСШ I класса надежности являются индукционными, работающими только от переменного тока.
Принцип действия двухэлементного реле основан на взаимодействии переменного магнитного потока одного элемента с током, индуцируемым в секторе переменным магнитным потоком другого элемента. В соответствии с законом электромагнитной индукции на проводник с током (сектор), помещенный в магнитное поле, действует сила, приводящая его в движение. Сектор реле поворачивается и переключает контакты. Сила, действующая на сектор, пропорциональна произведению токов местного и путевого элементов и зависит от угла сдвига фаз между ними.
Электромагнитная система реле ДСШ (рис. 2.9, а) имеет два элемента — местный и путевой. Местный элемент состоит из сердечника 1 и катушки 2. На сердечнике путевого элемента 3 помещена катушка 4. Между полюсами сердечников расположен алюминиевый сектор 5. Ток, проходящий по местной обмотке, образует совпадающий с ним по фазе магнитный поток ФМ, который индуцирует в секторе токи iМ , отстающие по фазе от потока ФМ на угол 90° (рис. 2.9, б). Под действием тока путевого элемента возникает магнитный поток ФП, индуцирующий в секторе токи iП.
Взаимодействие индуцированных токов iМ с магнитным потоком ФП создает вращающий момент M1, а токов iМс магнитным потоком ФМ — вращающий момент М2. Под действием суммарного вращающего момента М = М2 + М1 сектор перемещается вверх и замыкает фронтовые контакты. При выключении тока в путевой или местной обмотке сектор возвращается в исходное положение (вниз) под действием собственного веса. Поворот сектора ограничивается сверху и снизу роликами, которые для смягчения ударов могут перемещаться в направляющих их держателях.
Положительный вращающий момент и движение сектора вверх возможны только при определенном соотношении фаз между токами (напряжениями) путевого и местного элементов. Так как магнитные потоки ФП и Фм и индуцируемые ими в секторе токи iПи iМ пропорциональны токам путевого и местного элементов, вращающий момент пропорционален произведению токов путевого и местного элементов и зависит от угла сдвига фаз между ними:
M = IП I M sin (φ),
где φ — угол сдвига фаз IП и I M.
Наибольший вращающий момент реализуется при угле сдвига фаз между токами путевого и местного элементов, равном 90°.
Таким образом, токи и совпадающие с ними потоки путевого и местного элементов должны быть сдвинуты на угол 90°. Если бы катушки и сердечники путевого и местного элементов были одинаковы, то и опережающие ток напряжения UПи UМтакже были бы сдвинуты между собой на угол 90°. Однако из-за некоторого отличия характеристик катушек и сердечников путевого и местного элементов UМопережает по фазе IМ на 72°, a UПопережает по фазе IП на 65°. Поэтому напряжения UMи UП сдвинуты по фазе не на 90°, а на 97°.
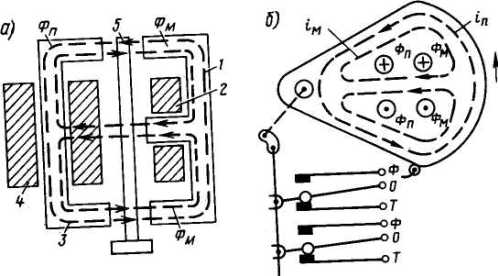
Рис. 2.9. Принципиальная схема реле ДСШ
Рис.2.10. Векторная диаграмма реле ДСШ
Практически для индукционных реле ДСШ обычно задается такой угол сдвига фаз между напряжением местного элемента и током путевого элемента, при котором реализуется максимальный вращающий момент.
Для реле ДСШ при частотах сигнального тока 50 и 25 Гц для реализации максимального вращающего момента необходимо, чтобы напряжение местной обмотки опережало ток путевой обмотки на угол (162±5)°. Этот угол называется идеальным углом сдвига фаз. Напомним, что угол сдвига фаз между токами и магнитными потоками путевого и местного элементом составляет при этом 90°.
Идеальные фазовые соотношения характеризуются следующими углами сдвига фаз (рис. 2.10): 900 между токами и магнитными потоками путевого и местного элементов; 162° между током путевого и напряжением местного элементов; 97° между напряжениями путевого и местного элементов.
Если фазовые соотношения отличаются от идеальных, то для обеспечения работы реле и получения необходимого вращающего момента требуется увеличить напряжение UПна обмотке путевого элемента до величины:
,
где φИ и φД — идеальный и действительный фазовые углы.
Приведенная формула верна при φИ>φД и φИ<φД, так как функция сos.φ одинакова при положительном и отрицательном углах.
Практически в условиях эксплуатации угол расстройки не должен превышать 25—30°. При отклонении угла расстройки на ±30° вращающий момент изменяется незначительно. Так как cos.30°=0,867, то требуется увеличение напряжения на путевой обмотке на 13—14% по сравнению со случаем идеальных фазовых соотношений. При дальнейшей расстройке функции соs(φИ – φД) изменяется более резко, рельсовая цепь работает неустойчиво, так как дальнейшие незначительные возрастания расстройки приводят к заметному снижению вращающего момента и силы подъема сектора. При расстройке 60° требуется увеличить напряжение на путевой обмотке в два раза.
Трансмиттеры
Маятниковый трансмиттер МТ-1 применяют для импульсного питания рельсовых цепей постоянного тока. Он вырабатывает импульсы тока с интервалами между ними: длительность импульсов и интервалов одинакова и равна 0,3 с.
Основными частями маятникового трансмиттера (рис. 2.11) являются электромагнитная система, ось с шайбами и маятником и контактная система. Электромагнитная система состоит из двух сердечников 1 с полюсными наконечниками, между которыми помещен якорь 2. На ось якоря насажены маятник 3 и гетинаксовые шайбы 4, 5 и 6, которые переключают контакты. На сердечники помещены катушки К1 и К2. Якорь насажен на ось так, чтобы в спокойном положении маятника ось якоря не совпадала с магнитной осью M1 и М2. В этом положении кулачковой шайбой 4 замкнут управляющий контакт УК. При включении тока якорь 2 под действием магнитного поля поворачивается против часовой стрелки, стремясь занять положение по оси М1-М2. Вместе с якорем поворачиваются маятник и кулачковые шайбы 4, 5 и 6. Управляющий контакт при этом размыкается и размыкает цепь питания обмоток. Маятник по инерции продолжает замедленное движение за счет запасенной кинетической энергии, затем под действием силы тяжести маятник вместе с осью и якорем начинает движение в обратном направлении. Проходя исходное (среднее) положение, шайба 4 замыкает контакт УК, включая обмотку. Однако маятник по инерции еще продолжает движение, затем движение возобновляется против часовой стрелки.
При прохождении якоря через среднее положение снова замыкаются контакты УК, и обмотки включаются. Якорь вместе с маятником получают дополнительное усилие. Таким образом, за счет энергии источника питания при каждом прохождении среднего положения маятник получает дополнительное ускоряющее усилие, устанавливаются незатухающие автоматические колебания. Трансмиттер МТ-1 совершает 95—115 колебаний в минуту. С такой же частотой замыкаются и размыкаются контакты 31-32 и 41-42. Через эти контакты в рельсовую цепь передаются импульсы тока. Трансмиттер МТ-2 имеет аналогичное устройство и отличается длительностью вырабатываемых импульсов и интервалов. Он совершает 40 + 2 колебаний в минуту, его контакт 31-32 замкнут и разомкнут в течение (0,75 + 0,1) с, а контакт 41-42 замкнут в течение (1+0,05) с, а разомкнут в течение (0,5 + 0,1) с. В положении покоя контакт 41-42 замкнут, а контакт 31-32 разомкнут. Трансмиттер МТ-2 применяют в схемах включения светофоров для обеспечения мигающего режима горения ламп. Маятниковые трансмиттеры рассчитаны для работы от источников постоянного тока напряжением 12 и 24 В.
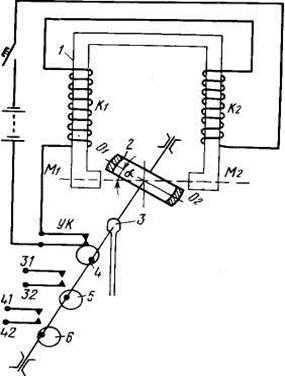
Рис. 2.11. Принципиальная схема маятникового трансмиттера МТ-1
Кодовые путевые трансмиттеры переменного тока КПТШ служат для образования кодовых сигналов, используемых в системах числовой кодовой автоблокировки и автоматической локомотивной сигнализации.
Трансмиттеры КПТШ-515 и КПТШ-715 используют в системе числовой кодовой автоблокировки и АЛСН переменного тока 50 Гц, КПТШ-815 и КПТШ-915 — при частоте сигнального тока 75 Гц. Продолжительность кодового цикла у трансмиттеров КПТШ-515 и КПТШ 815 составляет 1,6 с, а у трансмиттеров КПТШ-715 и КПТШ-915 — 1,86 с.
Основными частями трансмиттера являются однофазный асинхронный двигатель с короткозамкнутым ротором, редуктор, кулачковые шайбы и контактная система. Статор имеет две обмотки, смещенные в пространстве на угол 90°. Параллельно одной из обмоток у трансмиттеров, работающих от переменного тока 50 Гц, включен конденсатор емкостью 6 мкФ для расщепления фазы (у трансмиттеров, работающих от тока частотой 75 Гц, для этой же цели включен конденсатор емкостью 2 мкФ последовательно с обмоткой).
Благодаря пространственному смещению обмоток и электрическому смещению тока в одной из них включением конденсатора при питании статора однофа
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
zdamsam.ru
«Основы автоматики и телемеханики» - Конспект лекций
Рис. 6-10
Находится , затем из необходимых условий минимума функции  от переменных
от переменных 
, (6-21)|
получают систему уравнений для определения оптимальных по критерию минимума выбранной оценки параметров системы  . Если при этом получится, что некоторые оптимальные параметры должны быть равны нулю (или бесконечности), то их значения при установке в системе минимизируют (или максимизируют).
. Если при этом получится, что некоторые оптимальные параметры должны быть равны нулю (или бесконечности), то их значения при установке в системе минимизируют (или максимизируют).
Наиболее просто можно найти оценку (6-19):
.
Однако при этом должна быть гарантия, что переходный процесс в системе не имеет перерегулирований, иначе можно получить  в системе, весьма далекой от идеальной (на рис. 6-10 процесс
в системе, весьма далекой от идеальной (на рис. 6-10 процесс  при
при  имеет нулевую площадь).
имеет нулевую площадь).
Надежные результаты дает оценка (6-20). Этими оценками стали широко пользоваться в конце 40-х годов при проектировании систем управления летательными аппаратами. Оценку также довольно просто найти:
 (6-22а)
(6-22а)
где
(6-22б)
Вычисление по коэффициентам полиномов  и
и  приводит к выражению
приводит к выражению
 (6-22в)
(6-22в)
По выражению (6-22в) составлены таблицы для  (см. табл. 6-1 для
(см. табл. 6-1 для  ). Обратим внимание, что в знаменателе (6-22в) стоит старший определитель Гурвица
). Обратим внимание, что в знаменателе (6-22в) стоит старший определитель Гурвица  (см. § 5-3), поэтому для устойчивых систем, когда
(см. § 5-3), поэтому для устойчивых систем, когда  ,
,  , а для систем, находящихся на границе устойчивости, когда
, а для систем, находящихся на границе устойчивости, когда  ,
,  .
.
Таблица 6-1
Пример 6-3. Расчет системы программного регулирования температуры по критерию минимума .
Схема САР показана на рис. 1-9, а ее структурная схема — на рис. 6-11. Поскольку САР является астатической, то воспользуемся выражением (6-20)
Рис. 6-11
,
где ошибка регулирования имеет изображение
,
где  - Поэтому полиномы (6-22б) равны
- Поэтому полиномы (6-22б) равны
,
.
Таким образом, для  находим по табл. 6-1.
находим по табл. 6-1.
.
Поскольку в системе имеется возможность изменять параметр k (за счет изменения  ), то из условия минимума (6-21)
), то из условия минимума (6-21)
получаем квадратное уравнение
Выбираем только положительное значение k, являющее оптимальным для рассмотренной системы
, 
Заметим, что предельное значение параметра k, найденное, например, по критерию Гурвица
 .
.
Интересно, что при получаем  .
.
Глава 7
СТАБИЛИЗАЦИЯ И ЭЛЕМЕНТЫ СИНТЕЗА САР
При синтезе САР считается, что основные элементы системы (объект управления, датчики, исполнительные устройства) заданы, и необходимо так провести ее коррекцию, чтобы обеспечивалось требуемое качество системы как-то: заданные точность, быстродействие, запас устойчивости.
Решение задачи синтеза, вообще говоря, неоднозначно поскольку можно создать несколько САР, удовлетворяющего заданным показателям качества, но имеющих разную коррекцию. Проектировать САР надо так, чтобы корректирующее устройство (КУ) было наиболее простым, а сама коррекция наиболее просто осуществлялась.
В настоящее время наибольшее распространение получили методы коррекции с использованием логарифмических характеристик, причем для минимально-фазовых систем достаточно использовать только ЛАЧХ. Идея этих методов показана на рис. 7-1.
На основе технического задания (ТЗ) строится ЛАЧХ скорректированной системы . Одновременно по известным характеристикам исходной системы (без коррекции) строится  . На основе сравнения обеих ЛАЧХ а также из соображений простоты дальнейшей технической реализации коррекции выбирается схема коррекции (последовательная, с обратной связью, комбинированная), после чего находится ЛАЧХ корректирующего устройства
. На основе сравнения обеих ЛАЧХ а также из соображений простоты дальнейшей технической реализации коррекции выбирается схема коррекции (последовательная, с обратной связью, комбинированная), после чего находится ЛАЧХ корректирующего устройства  и производится выбор КУ. Рассматривая различные варианты схемы коррекции и соответствующие КУ, выбирают наилучший.
и производится выбор КУ. Рассматривая различные варианты схемы коррекции и соответствующие КУ, выбирают наилучший.
В ТЗ на систему обычно приводят:
1) условия точности:
а) допустимую ошибку  при отработке системой задающего гармонического воздействия
при отработке системой задающего гармонического воздействия  (обычно для следящих систем) с максимальной амплитудой и частотой
(обычно для следящих систем) с максимальной амплитудой и частотой  или произвольного воздействия с максимальными скоростью и ускорением ,
или произвольного воздействия с максимальными скоростью и ускорением ,
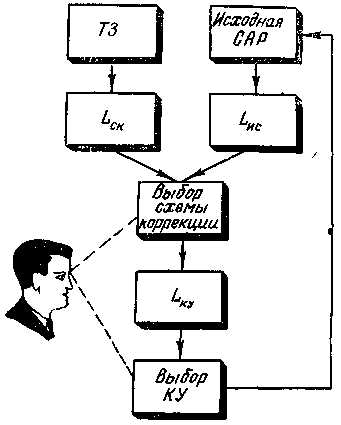
Рис. 7-1
б) порядок астатизма системы или требования отсутствия статических, иногда кинетических ошибок;
2) условия быстродействия: время регулирования  при отработке скачкообразных (ступенчатых) воздействий или частоту среза системы;
при отработке скачкообразных (ступенчатых) воздействий или частоту среза системы;
3) условия запаса устойчивости: запас по фазе  и по модулю
и по модулю  , либо допустимое перерегулирование
, либо допустимое перерегулирование  при отработке ступенчатого воздействия, либо коэффициент колебательности Мт (обычно для следящих систем).
при отработке ступенчатого воздействия, либо коэффициент колебательности Мт (обычно для следящих систем).
§ 7-1. Построение ЛАЧХ по техническому заданию
Как показывает практика, все качественные САР имеют типичные особенности в своих частотных характеристиках, или, другими словами, имеют типовые ЛАЧХ. Для последних рассчитаны номограммы, устанавливающие однозначную связь между параметрами ЛАЧХ и параметрами, имеющимися в ТЗ. Построение ЛАЧХ скорректированной системы (желаемой ЛАЧХ) начинается с низкочастотной области.
1. В области низких частот из условий точности работы системы определяется положение контрольной точки К (рис. 7-2) с координатами  , где
, где  — максимальная частота задающего воздействия,
— максимальная частота задающего воздействия,
, (7-1)
где  — коэффициент усиления (дб) на этой частоте.
— коэффициент усиления (дб) на этой частоте.
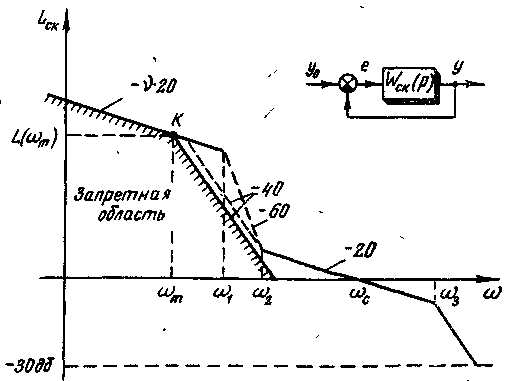
Рис. 7-2
Дело в том, что точность САР наиболее просто можно оценить по воспроизведению гармонического сигнала. Если по ТЗ наиболее тяжелое для воспроизведения задающее воздействие имеет вид
,
то амплитуда ошибки САР равна
, (7-2)
поскольку обычно в диапазоне рабочих частот. Из условия  получаем (7-1). Если в ТЗ заданы максимальная скорость и максимальное ускорение задающего воздействия, то его можно привести и эквивалентному гармоническому, имеющему частоту
получаем (7-1). Если в ТЗ заданы максимальная скорость и максимальное ускорение задающего воздействия, то его можно привести и эквивалентному гармоническому, имеющему частоту
и амплитуду
Через точку К проводят две асимптоты, определяющие запретную область (рис. 7-2), в которую не должна заходить  . Первая асимптота (для
. Первая асимптота (для  ) проводится с наклоном
) проводится с наклоном  дв/дек, где — заданный в ТЗ порядок астатизма системы. Вторая асимптота (для
дв/дек, где — заданный в ТЗ порядок астатизма системы. Вторая асимптота (для  проводится с наклоном
проводится с наклоном  дб/дек [3]. Если величина не задана, но оговорены в ТЗ условия допустимости или отсутствия статической
дб/дек [3]. Если величина не задана, но оговорены в ТЗ условия допустимости или отсутствия статической  или кинетической
или кинетической  ошибок, то величина выбирается по схеме:
ошибок, то величина выбирается по схеме:
При этом надо заметить, что стоимость и сложность САР обычно возрастает с увеличением порядка астатизма. ЛАЧХ скорректированной системы до частоты  обычно проводят по самой границе допустимой области, чтобы при коррекции САР обойтись минимальным числом каскадов усиления.
обычно проводят по самой границе допустимой области, чтобы при коррекции САР обойтись минимальным числом каскадов усиления.
2. В области средних частот  , обеспечивая требуемое быстродействие, через точку , которая дается в ТЗ или находится по величине заданного времени регулирования
, обеспечивая требуемое быстродействие, через точку , которая дается в ТЗ или находится по величине заданного времени регулирования
 ,
,  (7-4)
(7-4)
проводится асимптота с наклоном  дб/дек (рис. 7-2). Для минимально-фазовых систем такой наклон ЛАЧХ при надлежащем выборе длины отрезков
дб/дек (рис. 7-2). Для минимально-фазовых систем такой наклон ЛАЧХ при надлежащем выборе длины отрезков  ,
,  обеспечивает устойчивость САР. Чем больше величина этих отрезков, тем больше запас на фазе и меньше колебательность (сильнее демпфирование системы). Обычно берут длину этих участков
обеспечивает устойчивость САР. Чем больше величина этих отрезков, тем больше запас на фазе и меньше колебательность (сильнее демпфирование системы). Обычно берут длину этих участков  дек в обе стороны от .
дек в обе стороны от .
Если задан показатель колебательности Мт (обычно для следящих систем), то можно приближенно найти
 ,
,  . (7-5)
. (7-5)
Величина соответствует, системам с очень хорошим демпфированием; для большинства следящих систем допустима величина  .
.
3. Сопряжение низкочастотного отрезка ЛАЧХ и среднечастотного, т. е. в диапазоне  , проводятся асимптотой с наклоном дб/дек или дб/дек, но так, чтобы не попасть в запретную область.
, проводятся асимптотой с наклоном дб/дек или дб/дек, но так, чтобы не попасть в запретную область.
4. В области высоких частот (при ) проводится по возможности ,с наклоном  . Эту часть ЛАЧХ обычно строят до значений
. Эту часть ЛАЧХ обычно строят до значений  дб.
дб.
5. Уточняют, пользуясь номограммами и ТЗ значения .
Далее приступают к выбору схемы коррекции. Следует отметить, что задача коррекции будет относительно проста, если частота среза более чем на два порядка больше максимальной частоты задающего воздействия. Так, можно считать задачу коррекции простой, если , и сложной, если , где  по Тракселу.
по Тракселу.
§ 7-2. Последовательная схема коррекции САР
В схеме последовательной коррекции (рис. 7-3) КУ вводится в систему последовательно с остальными элементами в любое допустимое с инженерной точки
Рис. 7-3
зрения место (чаще всего — в электронный усилитель). Очевидно, что
,
поэтому
,
откуда искомая ЛАЧХ КУ находится как
Согласно (7-6), если выбрана последовательная схема коррекции, ЛАЧХ КУ находится весьма просто. Не представляет труда выбрать и рассчитать параметры самого КУ, в виде пассивной RС-цепочки, если оно должно работать в электрической цепи. Если же в исходной САР нет электрических элементов, то находят по передаточную функцию КУ и подбирают его из числа подходящих элементов.
Пример 7-1. Коррекция следящей системы.
Дана схема исходной системы (рис. 1-10,а).
Структурная схема системы имеет вид рис. 7-4. Частотная характеристика исходной системы равна
Рис. 7-4
,
где ; сек;  сек.
сек.
1. Согласно методике коррекции строим ,  рис. 7-5. Порядок построения :
рис. 7-5. Порядок построения :
а) находим сопрягающие частоты , ;
6) через точку с координатами ( , ) проводим под наклоном дб/дек асимптоту до частоты
, ) проводим под наклоном дб/дек асимптоту до частоты  ; затем — под наклоном дб/дек проводим асимптоту до частоты
; затем — под наклоном дб/дек проводим асимптоту до частоты  ; затем — под наклоном дб/дек. Строим
; затем — под наклоном дб/дек. Строим
.
2. Строим  по ТЗ, в котором указано:
по ТЗ, в котором указано:
а) максимальная частота задающего гармонического воздействия и допустимая относительная ошибка  ; астатизм системы
; астатизм системы  ;
;
б) время регулирования сек.
Согласно ТЗ находим координаты контрольной точки
, .
Строим запретную область. Находим частоту среза скорректированной системы  и проводим
и проводим
асимптоту с наклоном дб/дек, взяв отрезки  , дек, так, чтобы , при этом .
, дек, так, чтобы , при этом .
Сопряжение низкочастотной асимптоты со среднечастотной проводим отрезком с наклоном дб/дек (рис. 7-5,а). Высокочастотную асимптоту проводим с наклоном дб/дек, как в .
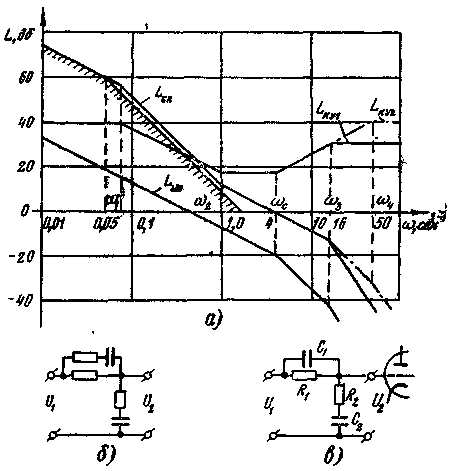
Рис. 7-5
3. Выбираем схему последовательной коррекции. Находим по (7-6)  . Хотя такое КУ1 достаточно просто реализовать в виде RС-цепи (рис. 7-5,б) и усилителя с коэффициентом усиления 100, все же нетрудно заметить что реализация КУ2 (рис. 7-5,в) по
. Хотя такое КУ1 достаточно просто реализовать в виде RС-цепи (рис. 7-5,б) и усилителя с коэффициентом усиления 100, все же нетрудно заметить что реализация КУ2 (рис. 7-5,в) по  была бы проще. Для того чтобы получить
была бы проще. Для того чтобы получить  , надо, чтобы
, надо, чтобы  проходила при частотах вначале под наклономдб/дек, а затем - дб/дек (штрихпунктир на рис. 7-5,а). Выбираем этот вариант и соответствующее ему КУ2. Выбираем электронный усилитель.
проходила при частотах вначале под наклономдб/дек, а затем - дб/дек (штрихпунктир на рис. 7-5,а). Выбираем этот вариант и соответствующее ему КУ2. Выбираем электронный усилитель.
4. Проводим расчет параметров КУ2. По  находим
находим
,
где , ; ; . Из таблиц корректирующих устройств [3, 5] находим аналитическое выражение для передаточной функции КУ2 без усилителя
.
Из сопоставления передаточных функций находим:
; ;
;
.
Замечаем, что третье уравнение получается из перемножения двух первых. Таким образом, имеем три уравнения для нахождения четырех неизвестных, поэтому один параметр КУ2 можно выбрать произвольно. Из ограничения на величину сеточного сопротивления лампы выбираем . Тогда . Из последнего уравнения получаем , тогда .
Заметим, что выбранное КУ является корректирующим устройством для цепей постоянного тока, поэтому при коррекции, например следящей системы переменного тока (см. рис. 1-10,б), которая имеет ту же , потребовалось бы КУ переменного тока, имеющее другую схему (на основе мостовой RС-цепи) [5].
§ 7-3. Коррекция с помощью обратной связи
В схеме коррекции с обратной связью (рис. 7-6,а) КУ вводится в систему, охватывая обратной связью часть системы с передаточной функцией  . Поскольку отрицательная корректирующая обратная связь уменьшает влияние охваченной части на характеристики системы, то стремятся охватывать обратной связью элементы с наименее стабильными характеристиками (электронные усилители, коллекторные двигатели и т. п.).
. Поскольку отрицательная корректирующая обратная связь уменьшает влияние охваченной части на характеристики системы, то стремятся охватывать обратной связью элементы с наименее стабильными характеристиками (электронные усилители, коллекторные двигатели и т. п.).
Различают коррекцию жесткими и гибкими обратными связями. Жесткая обратная связь (ж.о.с.) действует как в переходных, так и в установившихся режимах, а гибкая обратная связь (г.о.с.) — только в переходных режимам (рис. 7-6,б). Ввиду того, что при отрицательной ж.о.с, статический коэффициент усиления охваченной части системы уменьшается, это приводит к увеличению (см. пример 6-2) ошибок скорректированной системы, что порой нежелательно. Вследствие этого получила на практике большое распространение коррекция с помощью г. о. с. Рассмотрим методику нахождения КУ. Из схемы рис. 7-6,а имеем
Рис. 7-6
Как видим из последнего выражения, оно неудобно для использования ЛАЧХ. Однако, если в некотором диапазоне частот требуется обеспечить
, (7-7)
то это возможно, когда
или (7-8)
Наоборот, если в другом диапазоне частот
или , (7-9)
то
.
Таким образом, действительно, характеристики скорректированной системы могут не зависеть от охваченной части системы, при определенных выше условиях. Из (7-10) получаем возможность найти . Частоты , , при которых , т. е. границы диапазонов частот, в которых выполняется или (7-8), или (7-9), называются сопрягающими при коррекции обратной связью. Удобно воспользоваться таким порядком построения :
1. Строится ЛАЧХ исходной системы .
2. Строится по ТЗ ЛАЧХ скорректированной системы .
3. Находится в соответствии с (7-10), т. е. при условии (7-9) для некоторого диапазона частот [,], суммарная ЛАЧХ
4. Намечается, исходя из технических возможностей и нестабильности характеристик, охваченная часть системы и строится для нее  .
.
5. Находится для диапазона частот [,]
и достраивается вне этого диапазона таким образом, чтобы выполнялось условие (7-8).
6. По подбирается само КУ. Если оно оказывается нереализуемым, то выбирается другой вариант охваченной части системы.
Пример 7-2. Рассмотрим коррекцию следящей системы (рис. 1-10,б). Структурная схема ее показана на рис. 7-4. Исходная система имеет те же характеристики, что и в примере 7-1; условия ТЗ те же. Тогда, найдя координаты контрольной точки, увеличиваем /коэффициент усиления в исходной системе так, чтобы полученная  не заходила в запретную область (рис. 7-7,а). Строим
не заходила в запретную область (рис. 7-7,а). Строим  по ТЗ. Очевидно, что в диапазоне частот,. В области средних частот асимптоту с наклоном
по ТЗ. Очевидно, что в диапазоне частот,. В области средних частот асимптоту с наклоном  дб/дек проводим по запретной области с одной стороны и до пересечения с
дб/дек проводим по запретной области с одной стороны и до пересечения с  — с другой. Сопрягающую асимптоту проводим по границе запретной области. Тогда получаем сопрягающие частоты при коррекции обратной связью . В этом диапазоне находим
— с другой. Сопрягающую асимптоту проводим по границе запретной области. Тогда получаем сопрягающие частоты при коррекции обратной связью . В этом диапазоне находим  . Охватываем тахометрической обратной связью усилитель, ЭМУ и двигатель. Следовательно,
. Охватываем тахометрической обратной связью усилитель, ЭМУ и двигатель. Следовательно,
,
где .
Строим  и находим в диапазоне частот
и находим в диапазоне частот  . Наиболее простое КУ получится, если вне указанного диапазона проходит, как на рис. 7-1,а (пунктир). В этом случае удовлетворяется и условие (7-8).
. Наиболее простое КУ получится, если вне указанного диапазона проходит, как на рис. 7-1,а (пунктир). В этом случае удовлетворяется и условие (7-8).
Таким образом, останавливаемся на этом варианте, тогда
 ,
,
что соответствует гибкой обратной связи. Реализация КУ показана на рис. 7-7,б, при этом, ввиду того что  , обратная связь осуществляется без усилителя. Сигнал ик подается с КУ н точки
, обратная связь осуществляется без усилителя. Сигнал ик подается с КУ н точки  исходной схемы (рис. 1-10,б).
исходной схемы (рис. 1-10,б).
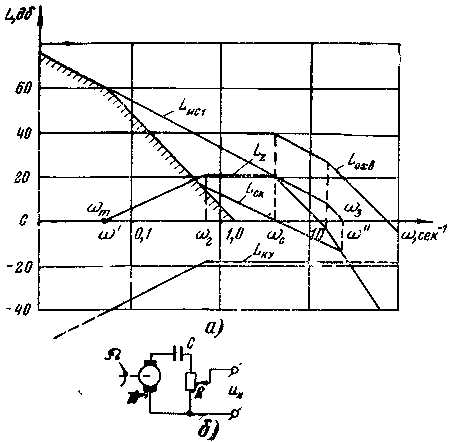
Рис 7-7
§ 7-4. Сравнительная оценка методов коррекции
Достоинство последовательной коррекции — в простоте ее реализации, особенно если КУ имеет вид RС-цепочки. Однако возможности такой коррекции сравнительно невелики: ее применяют обычно тогда, если исходная система близка к устойчивости или же устойчива, но обладает плохим качеством переходных процессов (излишняя колебательность, малое быстродействие). Широко применяют в этих случаях различные RС-цепи, дающие опережение по фазе (дифсреренцирующие, упругодифференцирующие звенья). Однако в ряде случае они подчеркивают действие высокочастотных помех. Кроме того, эффективность последовательной коррекции сильно уменьшается при нестабильности характеристик исходной системы  .
.
Коррекция отрицательной обратной связью, напротив, снижает зависимость характеристик системы от нестабильности характеристик охваченной части исходной системы. К недостаткам надо отнести сравнительную сложность реализации КУ. При этом для реализации такой коррекции необходимы датчики тех величин, которые поступают на КУ (в примере 7-2 этим датчиком является тахогенератор). Такие датчики в ряде случаев могут оказаться громоздкими или дорогими.
gigabaza.ru
| Профессиональный модуль ПМ 01,1 «Участие в проектировании систем газораспределения и газоснабжения ». Дисциплина «Междисциплинарный комплекс МДК 01.01. Особенности проектирования систем газораспределения и газоснабжения » Группа 2 «г», заочное отделение Тема 1.1.2. «Основы автоматики и телемеханики» Тема 1.1.5. «Автоматические устройства в ГРП» Тема 1.1.8. «Автоматические устройства жилых домов промышленных и коммунально-бытовых предприятий» I Общий перечень литературы 1. В.А. Жили. Автоматика и телемеханика систем газоснабжения. -М.: ИНФА - М, 2006. Дополнительная литература 1. А.А. Данилов Автоматизированные газораспределительные станции. Справочник. – С.-П.: Химиздат,2004 2. В.А. Жила, М.А. Ушаков, О.Н. Брюханов Газовые сети и установки. – М.: Академия, 2003 3. К.Г. Кязимов Справочник газовика. – М.: Академия, 2000 4. К.Г. Кязимов, В.Е. Гусев Основы газового хозяйства. – М.: Академия, 2000 5. ПБ 12-529-03. Правила безопасности систем газораспределения и газопотребления. М.: Гостехнадзор России, 2003 6. Промышленное газовое оборудование. Справочник (под редакцией Е.А. Карякина). – Научно – исследовательский центр промышленного газового оборудования «Газовик», Саратов, 2002 7. Регуляторы давления газа. Реферат.- Бузулук, БСК,2005 8. А.А. Рульнов, И.И. Горюнов, К.Ю. Евстафьев Автоматическое регулирование. – М.: ИНФА- М, 2008. 9. С.П. Сладков Автоматизация и телемеханизация газового хозяйства.- М.: Стройиздат, 2000 10. СНиП 42-01-2002. Газораспределительные системы. Госстрой России. М.: 2003 11. Счетчики количества. Реферат. – Бузулук, БСК, 2006 II Контрольные вопросы. 1. Термометры расширения жидкостные, биметаллические, дилатометрические. 2. Автоматика безопасности водонагревателя АВГ. Электромагнитный клапан. 3. Манометрические термометры. 4. Регулятор давления газа тепа РДБК 1 5. Автоматик регулирования водонагревателя АГВ. Терморегулятор. 6. Термометры сопротивления. Вторичные приборы, работающие с ТС. Логометр. 7. Регулятор давления газа типа РД-32М. 8. Мосты для измерения температуры неуравновешенные и уравновешенные. 9. Регуляторы давления газа типа РДГД -20. 10. Термоэлектрические термометры. Вторичные приборы работающие с ним. Милливольтметры для измерения температуры. 11. Регуляторы давления газа типа РДНК. 12. Потенциометрический метод измерения температуры. Автоматический потенциометр типа КСП. 13. Регулятор давления газа РДГ-80. 14. Дистанционная передача с дифференциально-трансформаторными преобразователями. 15. Объёмные газовые счётчики . 16. Скоростные газовые счетчики. 17. Измерение расхода по методу переменного перепада давления. Основные узлы расходомерной установки. 18. Горелочное устройство типа УГОП-П-16. 19.Манометры и дифманометры бесшкальные типа МЕД и ДМ. 20.Регуляторы давления газа типа РДУК. 21. Погрешности измерения. 22. Манометры с одновитковой трубчатой пружиной. 23. Мембранные приборы давления. 24. Течеискатель ФГ- 02 25.Газоанализатор типа Родос- 05 26. Сигнализатор загазованности типа СИКЗ. 27.Регуляторы давления газа баллонные для СУГ. 28. Предохранительно запорные клапаны в ГРП. 29.Предохранительно сбросные клапаны в ГРП. 30. Метрологическая служба и её задачи. 31.Автоматика бытовых газовых плит. 32. Испытательные механизмы. 33. Регулирующие органы. 34. Поверки измерительных приборов 35. Приборы для измерения уровня жидкости. 36. Термохимические газоанализаторы. 37. Электрические регуляторы. 38. Автоматика проточных водонагревателей. 39. Датчики тяги в бытовых газовых приборах. 40.Измерительные комплексы типа СГ- ЭК. III Задания по вариантам на контрольную работу.
| ||||||||||
100-bal.ru
ЭКСПЛУАТАЦИОННЫЕ ОСНОВЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
РАБОЧАЯ УЧЕБНАЯ ПРОГРАММА
Титульный лист рабочей Форма учебной программы Ф СО ПГУ 7.18.3/30 Министерство образования и науки Республики Казахстан Павлодарский государственный университет им. С. Торайгырова Кафедра транспортной
ПодробнееКОНСТРУИРОВАНИЕ И РАСЧЕТ ВАГОНОВ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ МИНИСТЕРСТВА ПУТЕЙ СООБЩЕНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ 14/10/1 Одобрено кафедрой «Вагоны и вагонное хозяйство» Утверждено деканом
ПодробнееОБЩИЙ КУРС ЖЕЛЕЗНЫХ ДОРОГ
МИНИСТЕРСТВО ПО ОБРАЗОВАНИЮ И НАУКЕ РФ Государственное образовательное учреждение высшего профессионального образования «ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ» НОЯБРЬСКИЙ ИНСТИТУТ НЕФТИ И
ПодробнееОРГАНИЗАЦИЯ ПАССАЖИРСКИХ ПЕРЕВОЗОК
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ 9/32/1 Одобрено кафедрой «Эксплуатация железных дорог» Утверждено деканом факультета «Управление процессами перевозок» ОРГАНИЗАЦИЯ ПАССАЖИРСКИХ ПЕРЕВОЗОК
ПодробнееОРГАНИЗАЦИЯ, ПЛАНИРОВАНИЕ ПРОИЗВОДСТВА
Федеральное агентство железнодорожного транспорта Уральский государственный университет путей сообщения Кафедра «Экономика транспорта» К. И. Анненкова ОРГАНИЗАЦИЯ, ПЛАНИРОВАНИЕ ПРОИЗВОДСТВА Екатеринбург
ПодробнееРАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ
Министерство образования и науки Московской области Государственное бюджетное профессиональное образовательное учреждение Московской области ОРЕХОВО-ЗУЕВСКИЙ ЖЕЛЕЗНОДОРОЖНЫЙ ТЕХНИКУМ имени В.И.БОНДАРЕНКО
ПодробнееРабочая программа профессионального модуля
Новосибирский техникум железнодорожного транспорта структурное подразделение федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Сибирский государственный
ПодробнееКОНТЕЙНЕРНАЯ ТРАНСПОРТНАЯ СИСТЕМА
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ 9/7/1 Одобрено кафедрой «Управление эксплуатационной работой» Утверждено деканом факультета «Управление процессами перевозок»
ПодробнееИтоговый тест по ОКЖД
Итоговый тест по ОКЖД 1. Частью инфраструктуры железнодорожного транспорта НЕ являются железнодорожные пути локомотивы и вагоны искусственные сооружения устройства электроснабжения и связи 2. Первая железная
ПодробнееРАБОЧАЯ ПРОГРАММА ПРОФЕССИОНАЛЬНОГО МОДУЛЯ
Калужский филиал федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Московский государственный университет путей сообщения» РАБОЧАЯ ПРОГРАММА ПРОФЕССИОНАЛЬНОГО
ПодробнееОК-2 ОК-6 ОК-10 ОК-2 ОК-6 ОК-10 ОК-2 ОК-6 ОК-10
1.1 Оценивание и контроль сформированности компетенций осуществляется с помощью текущего контроля успеваемости и промежуточной аттестации. Текущий контроль успеваемости и промежуточная аттестация проводятся
ПодробнееРАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ
Министерство образования и науки Московской области Государственное бюджетное профессиональное образовательное учреждение Московской области ОРЕХОВО-ЗУЕВСКИЙ ЖЕЛЕЗНОДОРОЖНЫЙ ТЕХНИКУМ имени В.И.БОНДАРЕНКО
ПодробнееПОЯСНИТЕЛЬНАЯ ЗАПИСКА
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Методические указания по выполнению практического занятия разработаны в соответствии с рабочей программой и с учетом примерной программы профессионального модуля ПМ.01 «Построение
ПодробнееУЧЕБНАЯ ПРАКТИКА ПО УПРАВЛЕНИЮ ДВИЖЕНИЕМ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА ТОМСКИЙ ТЕХНИКУМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Сорокина Л.В. УЧЕБНАЯ ПРАКТИКА ПО УПРАВЛЕНИЮ ДВИЖЕНИЕМ УЧЕБНОЕ ПОСОБИЕ 2010 2 Одобрено на заседании цикловой
ПодробнееФИНАНСОВЫЙ МЕНЕДЖМЕНТ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ 6/46/3 Одобрено кафедрой «Экономика, финансы и управление на транспорте» Утверждено деканом факультета «Экономический» ФИНАНСОВЫЙ
ПодробнееУП «ПО УПРАВЛЕНИЮ ДВИЖЕНИЕМ»
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ
ПодробнееЭКОНОМИЧЕСКАЯ ОЦЕНКА ИНВЕСТИЦИЙ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ МИНИСТЕРСТВА ПУТЕЙ СООБЩЕНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ 26/35/ Одобрено кафедрой «Экономика, финансы и управление на транспорте» Утверждено
Подробнее1. Цели и задачи программы
1. Цели и задачи программы Согласно Паспорту специальности 05.22.08 - «Управление процессами перевозок (технические науки)» проводятся исследования в следующих областях: - планирование, организация и управление
ПодробнееЭЛЕКТРОСНАБЖЕНИЕ ЖЕЛЕЗНЫХ ДОРОГ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ МИНИСТЕРСТВА ПУТЕЙ СООБЩЕНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ 11/16/1 Одобрено кафедрой «Энергоснабжение электрических железных дорог» Утверждено
ПодробнееОСНОВЫ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ МИНИСТЕРСТВА ПУТЕЙ СООБЩЕНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ 11/18/1 Одобрено кафедрой «Энергоснабжение электрических железных дорог» Утверждено
ПодробнееТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ МИНИСТЕРСТВА ПУТЕЙ СООБЩЕНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ 11/12/1 Одобрено кафедрой «Энергоснабжение электрических железных дорог» Утверждено
ПодробнееОБЩИЙ КУРС ТРАНСПОРТА
МПС РОССИИ РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ 9/5/6 Одобрено кафедрой «Управление эксплуатационной работой» Утверждено деканом факультета «Управление процессами
ПодробнееОрганизация работы сортировочной станции
Федеральное агентство железнодорожного транспорта Уральский государственный университет путей сообщения Кафедра Управление эксплуатационной работой Е.Е. Смородинцева Организация работы сортировочной станции
ПодробнееРАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ
Государственное бюджетное образовательное учреждение среднего профессионального образования Московской области МОСКОВСКИЙ ОБЛАСТНОЙ ЖЕЛЕЗНОДОРОЖНЫЙ ИНДУСТРИАЛЬНЫЙ ТЕХНИКУМ имени В.И.БОНДАРЕНКО УТВЕРЖДАЮ
ПодробнееРАБОЧАЯ УЧЕБНАЯ ПРОГРАММА ДИСЦИПЛИНЫ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Улан-Удэнский колледж железнодорожного транспорта Улан-Удэнского института железнодорожного транспорта - филиала федерального государственного бюджетного
ПодробнееВПД ВПД. ВПД. ВПД. ВПД.
Практики основной профессиональной образовательной программы по специальности 220415 Автоматика и телемеханика на транспорте (на ж.д. транспорте)» на базе основного общего образования, базовый уровень.
ПодробнееПРОФЕССИОНАЛЬНЫЙ СТАНДАРТ
УТВЕРЖДЕН приказом Министерства труда и социальной защиты Российской от «19» мая 2014 г. 321н ПРОФЕССИОНАЛЬНЫЙ СТАНДАРТ Работник по управлению и обслуживанию локомотива 116 I. Общие сведения Управление
ПодробнееСИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЕМ
РОСЖЕЛДОР Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Ростовский государственный университет путей сообщения (ФГБОУ ВПО РГУПС) Лискинский техникум
Подробнееdocplayer.ru
теоретические основы автоматики телемеханики и связи 2, Автоматизация
Пример готовой курсовой работы по предмету: Автоматизация
Оглавление
Задание № 1 Синтез и исследование автоматического регулятора скорости движущегося объекта
1 Решение
1.1 Исходные данные
1.2Общие данные
1.3 Структурная схема регулятора скорости с использованием типовых звеньев САУ
1.4 Выбор параметров математической модели типовых звеньев
1.5 Построение структурной схемы САР и задание параметров звеньев
1.6 Исследование синтезированного регулятора скорости
1.7 Заключение
Задание № 2 Синтез и исследования кодера и декодера информации
2 Решение
2.1 Задание
2.2 Исходные данные для выполнения задания
2.3 Общие сведения
2.4 Коды Хэмминга
2.5 Построение кодера и декодера для заданного кода
2.6 Построение заданного кода для передаваемого сообщения
2.7 Расчет корректирующих способностей заданного кода
2.8 Структурный синтез кодирующего устройства (кодера)
2.9 Структурный синтез декодирующего устройства (декодера)
2.10 Исследование корректирующих способностей синтезированного декодера.
Список литературы
Содержание
Выдержка из текста
В зависимости от характера воздействий оказываемого регулятором на регулируемый объект различают системы непрерывного, импульсного и релейного действия.
Появляется возможность значительно расширить радиус действия централизированного управления и практически сосредоточить управление всеми стрелками и сигналами станции на одном централизованном посту.
обеспечение эффективной экономической политики, развития подсобно-вспомогательной деятельности, повышающих рентабельность работы и способствующие улучшению социального положения работников.
Практическая значимость исследования заключается в возможности использования полученных результатов с целью повышения эффективности деятельности предприятия ООО «Грит» в целом и системы мотивации и стимулирования труда в частности.
Также материалы данного исследования можно использовать в других предприятиях общественного питания.
Продукцией строительства являются законченные и подготовленные к вводу в действие новые и реконструируемые промышленные предприятия и цеха, жилые дома, общественные здания и другие объекты. Одним из наиболее емких участков бухгалтерского учета являются учет затрат на производство и калькулирование себестоимости выпускаемой продукции, выполняемых работ или оказанных услуг. Это важно не только во взаимосвязи с действующим в настоящее время налоговым законодательством, но и в соответствии с местом бухгалтерского учета в системе управления организацией.
Рыболовство на Дальнем Востоке играет значительную роль в развитии продовольственного комплекса страны. Особенность Дальневосточного бассейна состоит в том, что он расположен лучшей из всех регионов Российской Федерации сырьевой базой, которая характеризуется близостью регионов промысла к основным местам базирования добывающего флота и рыбообрабатывающим предприятия; значимостью потенциальных биологических ресурсов; уникальным видовым составом биологических ресурсов; длительностью организации промысла.
Объектами работ на этой стадии поиска месторождений (залежей) являются ловушки, подготовленные для поискового бурения. Основанием для постановки поискового бурения служит наличие подготовленной к нему структуры (ловушки) и подсчитанных перспективных ресурсов категории Сз.
Эволюция взглядов на природу прибыли начинается с момента появ-ления меркантилизма, выдающимся представителем которого в Англии был Т. Мэн. Согласно меркантилистской теории источником прибыли считается внешняя торговля государства. Меркантилисты утверждали, что прибыль, получаемая в сфере обращения, определяется как разница между продажной и закупочной ценой товара.
Между тем, эксперты в области менеджмента считают, что планирование и грамотная постановка целей — это очень важная часть дела и без этого никуда. Когда открывается новое дело, здесь крайне важно четко понимать когда и что должно быть сделано. Целью данного исследования является: изучение теоретических основ бизнес-планирования, и выявление составляющей производственной части бизнес-плана.
В действующей практике используются разнообразные методы формирования фонда оплаты труда как в целом по предприятию, так и по структурным подразделениям. Следует отметить, что наилучшим образом эту задачу может решать нормативный метод формирования фонда оплаты труда. Именно данный метод использует большинство компаний в странах с развитой рыночной экономикой. Однако он может быть действенным лишь при наличии следующих условий: во-первых, нормативы должны быть стабильные, долговременные, изменяться лишь в случае влияния на объем производства факторов, не связанных с трудовыми условиями коллектива. Во-вторых, нормативы формирования фонда оплаты труда должны быть не индивидуальные, а групповые.
Внедрение и распространение электрической централизации стрелок и сигналов на станциях обусловило использование весьма разветвленных кабельных станционных сетей:
Список литературы
1.ШалягинД.В., Цыбуля Н.А., Косенко С.С. и др. Устройства автоматики, телемеханики и связи: Учеб. для вузов ж.-д. трансп.; в 2 ч. — М.: Маршрут, 2006.
2.Шалягин Д.В., Цыбуля Н.А., Боровков Ю.Г. Автоматика, телемеханика и связь: Уч. пос. Ч.
1. Автоматика и телемеханика. — М.: РГОТУПС, 2003.
3.СапожниковВ.В., Кравцов Ю.А., Сапожников Вл.В. Теория дискретных устройств железнодорожной автоматики, телемеханики и связи: Учеб. для вузов ж.-д. трансп. — М.: Транспорт, 2001.
4.СапожниковВ.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические основы железнодорожной автоматики и телемеханики: Учеб. для вузов ж.-д. трансп. — М.: Транспорт, 1996.
5.ШалягинД.В. Теоретические основы железнодорожной автоматики и телемеханики: Конспект лекций. 4.1. Дискретные устройства. — М.: РГОТУПС, 1998.
6.Тутевич В.Н. Телемеханика: Учеб. для вузов, — М.: Высшая школа, 1985.
7.Воронов А.А. Теория автоматического управления: Учеб. для вузов. — М.: Высшая школа, 1986.
8.СРЕДСТВА ОБЕСПЕЧЕНИЯ ДИСЦИПЛИНЫ
9.Компьютерные автоматизированные обучающие системы по анализу и синтезу элементов и узлов автоматики, телемеханики и связи.
10.Рабочая программа и задание на курсовую работу с методическими указаниями для студентов IV курса. — М.: РГОТУПС, 2008.
Список использованной литературы.
1.Сапожников В.В. и др. Теоретические основы железнодорожной автоматики и телемеханики: Учебник для вузов/ Под. ред. В.В.Сапожникова. — М.: Транспорт, 1995.
2.Шалягин Д.В., Цыбуля Н.А., Боровков Ю.Г. Автоматика, телемеханика. 4.1: Учебное пособие, — М.: РГОТУПС, 2004.
3.Методические указания для студентов 4 курс «АТС»
под ред. Тимченко Г. В., М.: РГОТУПС, 2004.
список литературы
referatbooks.ru








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






