
Характеристики магнитного поля — fiziku5.ru
Магнитное поле – одна из двух сторон электромагнитного поля, характеризующаяся воздействием на электрически заряженную частицу с силой, пропорциональной заряду частицы и её скорости.
В проводнике с током и вокруг него возникает магнитное поле. Оно может возникать не только вокруг проводников с током, но и при движении любых заряженных частиц и тел, а также при изменении электрического поля.
Свойства магнитного поля:
— оказывает силовое воздействие на движущиеся в нем заряженные тела и на неподвижные проводники с электрическим током;
— способно намагничивать ферромагнитные тела;
— возбуждать ЭДС в проводниках, которые перемещаются в магнитном поле.
Характеристики магнитного поля:
— магнитная индукция В = ;
— магнитный поток Ф = В · S;
— абсолютная магнитная проницаемость μа = μ0 · μr;
— относительная магнитная проницаемость μr;
— магнитная постоянная μ0
— напряжённость магнитного поля Н = .
Правило буравчика (для прямолинейного проводника): если поступательное движение буравчика совпадает с направлением тока в проводе, то вращение рукоятки буравчика укажет направление магнитных силовых линий.
Правило буравчика для катушки с током: если рукоятку буравчика вращать по направлению тока в витках, то его поступательное движение совпадёт с направлением магнитных линий внутри катушки.
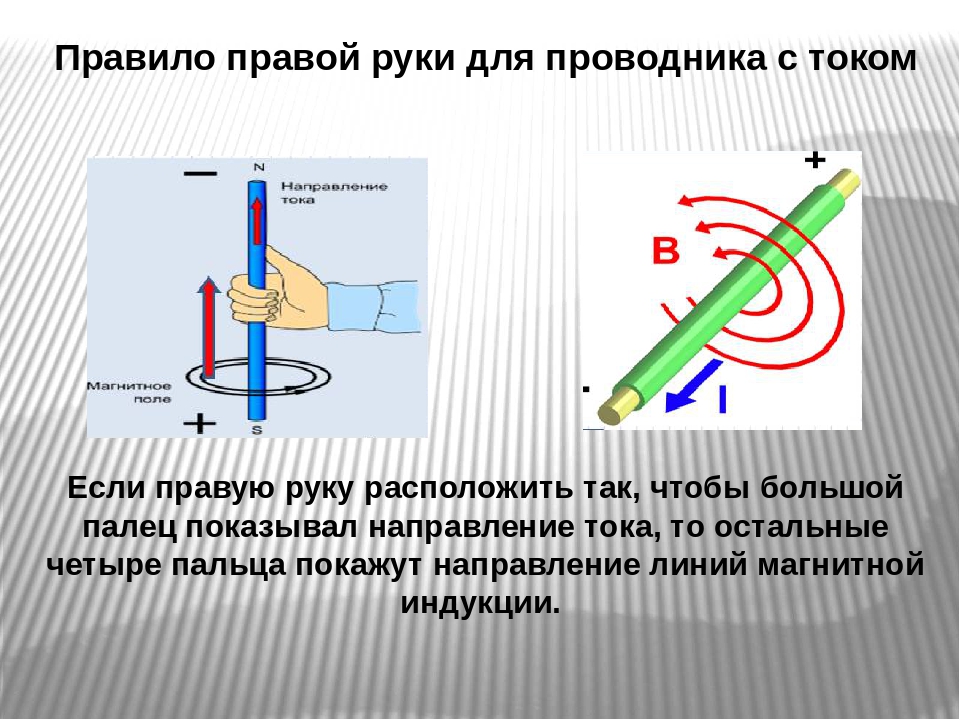
Правило правой руки (для определения направления ЭДС индукции): если ладонь правой руки нужно расположить так, чтобы магнитные линии входили в неё, а отогнутый под прямым углом большой палец указывал направление движения проводника, то выпрямленные четыре пальца руки укажут направление индуцированной ЭДС.
Правило левой руки: если ладонь левой руки расположить так, чтобы магнитные линии входили в неё, а четыре выпрямленных пальца совпадали с направлением тока, то отогнутый под прямым углом большой палец укажет направление силы.
10
2. Данные всех приборов и машин занесите в таблицу 1.
I. Снятие характеристики холостого хода
3. После проверки схемы преподавателем, включите схему. Плавно изменяя ток возбуждения Iвозб, с помощью реостата Rрег снять показания амперметра и вольтметра. Данные замеров занесите в таблицу 2.
Таблица 2
№ опыта | Iвозб, А | Евосх, В | Енисх, В |
1 | |||
2 | |||
3 | |||
4 | |||
5 | |||
6 | |||
7 | |||
8 |
4. По данным опыта постойте характеристики холостого хода:
Е, В
Iвозб, А
II.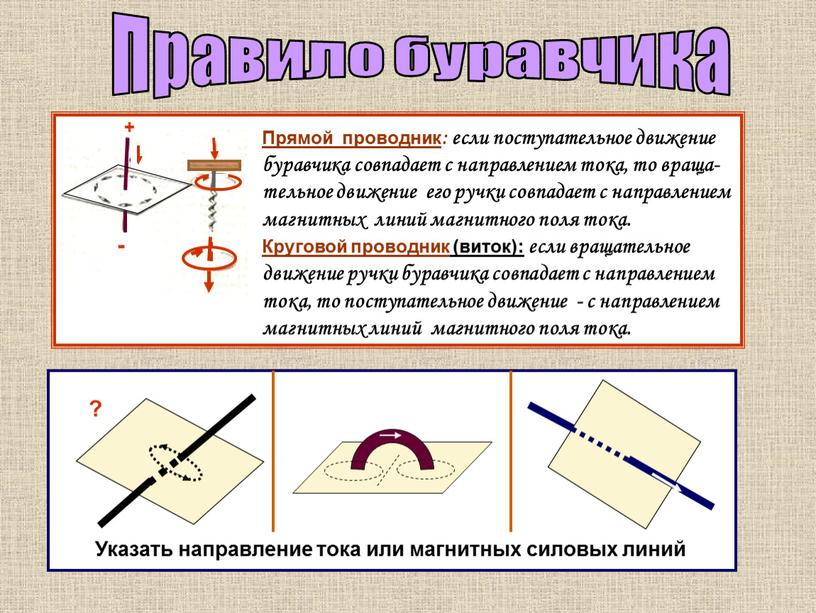 Снятие внешней характеристики
Снятие внешней характеристики
5. Включить двигатель и с помощью реостата Rрег установить на зажимах генератора номинальное напряжение Uн, согласно заданию преподавателя. Плавно увеличивая ток нагрузки Iн, включая поочерёдно соответствующие тумблеры снять показания амперметров и вольтметра. Данные замеров занесите в таблицу 3.
Таблица 3
№ опыта | U, В | Iнагр, А | Iвозб, А |
1 | |||
2 | |||
3 |
35
В любой машине чётко выделяются подвижная (ротор) и неподвижная (статор) части. Часть машины, в которой индуцируется электродвижущая сила (ротор), называют якорем, а часть машины, в которой создаётся магнитное поле возбуждения (статор) – индуктором.
Работа электрической машины характеризуется взаимодействием двух направленных навстречу друг другу вращающих моментов, один из которых создаётся механическими, а другой – электромагнитными силами.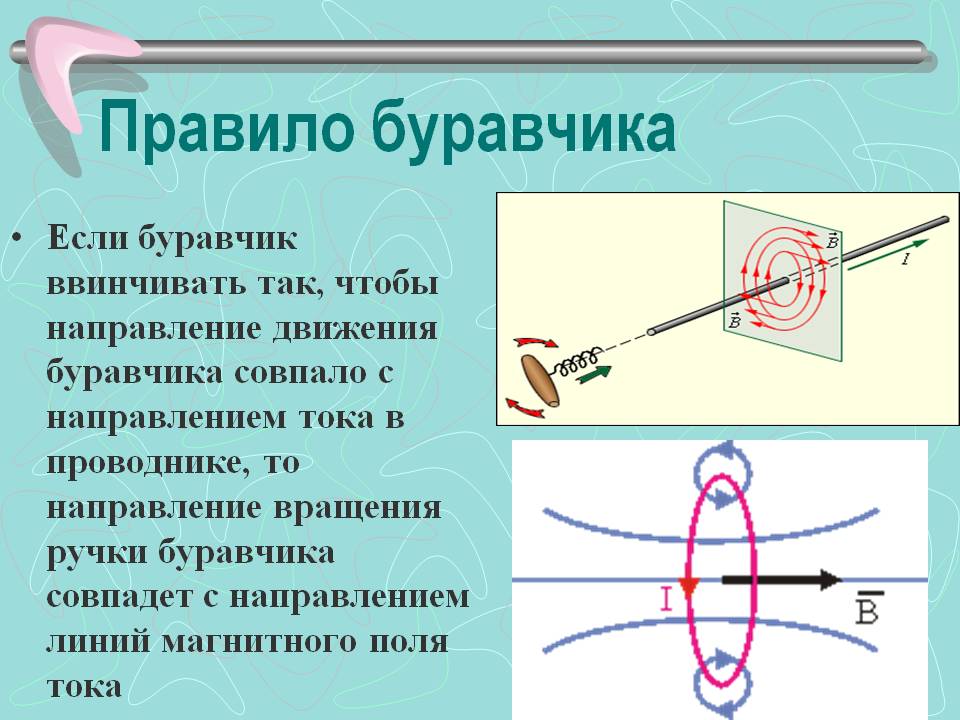 Кроме того, работа двигателя и генератора характеризуется взаимодействием напряжения сети и ЭДС, возникающей в обмотке якоря.
Кроме того, работа двигателя и генератора характеризуется взаимодействием напряжения сети и ЭДС, возникающей в обмотке якоря.
Различают генераторы независимого возбуждения и генераторы с самовозбуждением.
В генераторах независимого возбуждения основной магнитный поток создаётся либо постоянным магнитом, либо электромагнитом (обмоткой возбуждения), питаемым от источника постоянного тока.
В генераторах с самовозбуждением питание обмотки главных полюсов осуществляется напряжением самого генератора. При этом отпадает необходимость в отдельном источнике энергии. В зависимости от схемы включения обмотки возбуждения различают генераторы параллельного, последовательного и смешанного возбуждения.
Основные характеристики генераторов:
· холостого хода – зависимость ЭДС генератора от тока возбуждения при постоянной частоте вращения якоря и отключённой нагрузке Е = f (Iв);
· внешняя характеристика – зависимость нагрузки на зажимах генератора от тока нагрузки при постоянной частоте вращения и постоянном сопротивлении цепи возбуждения U = f (I);
· регулировочная характеристика – зависимость тока возбуждения от тока нагрузки при постоянных частоте вращения и напряжении на зажимах генератора Iв = f (I).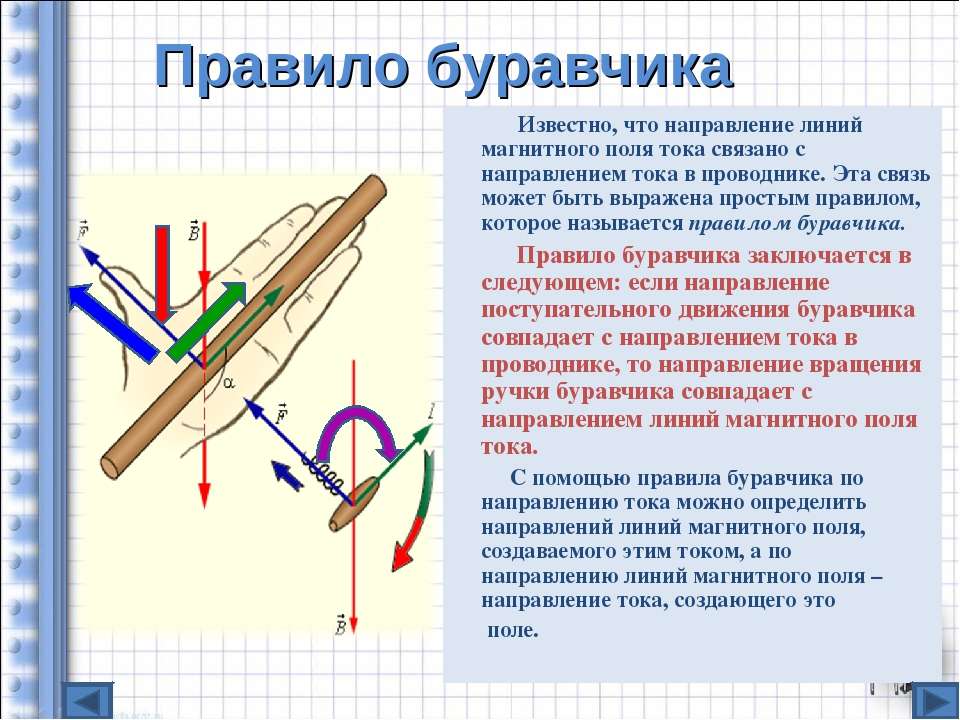
Порядок выполнения работы:
1. Соберите электрическую схему, показанную на рисунке 1.
Рисунок 1.
34
Оборудование:
1. Аккумуляторная батарея
2. Гальванометр
3. Реостат
4. Полосовой постоянный магнит
5. Индукционная катушка с сердечником
Порядок выполнения работы:
I. Проверка законов электромагнитной индукции
1. Вводя в катушку постоянный электромагнит, как показано на рисунке 1, замерьте отклонения стрелки гальванометра и запишите результаты измерений.
Рисунок 1
· Рис. а) — __________________________________________________________________________________________________________________________________________________________________________________________________________________
· Рис. б) — __________________________________________________________________________________________________________________________________________________________________________________________________________________
· Рис.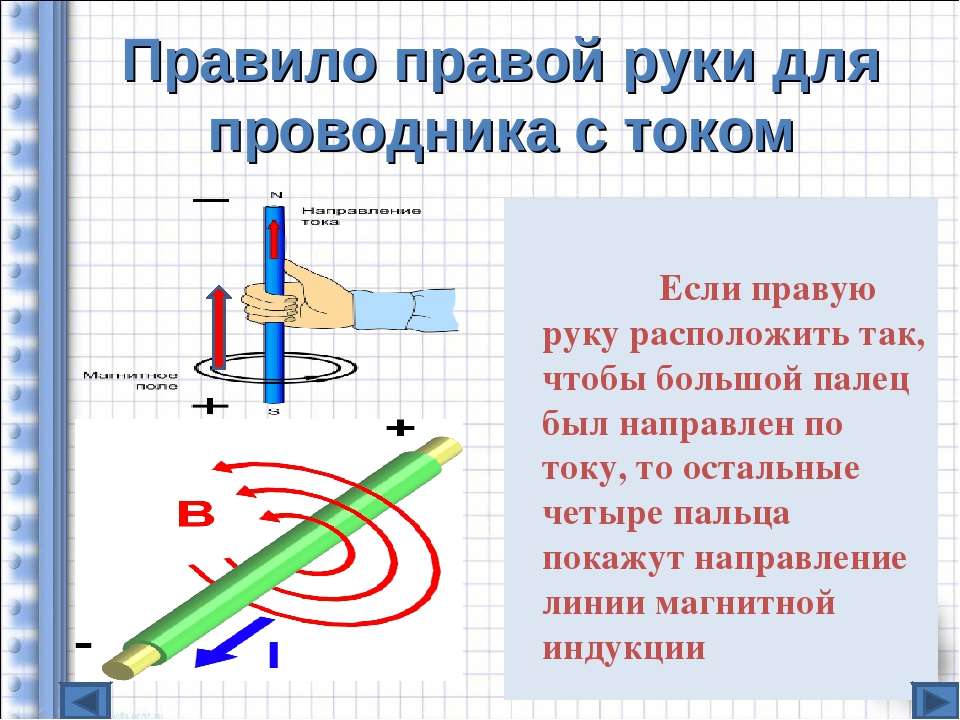 в) — __________________________________________________________________________________________________________________________________________________________________________________________________________________
в) — __________________________________________________________________________________________________________________________________________________________________________________________________________________
· Рис. г) — __________________________________________________________________________________________________________________________________________________________________________________________________________________
11
II. Изучение явления самоиндукции
2. Изучите явление самоиндукции, используя две индукционных катушки, как показано на рисунке 2. Запишите результаты наблюдений.
Рисунок 2
· Рис. а) — ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
· Рис. б) — ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
б) — ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Правило буравчика — определение, формулировка и применение
Общее понятие
Узнать путь перпендикуляра к двум выбранным векторам и понять направление стержня можно при помощи нескольких способов. В физике правило буравчика определяет вектор силы электромагнитной области в первоначальной точке и направление витков проводника вокруг вращательного центра.
Способы применения правила взаимодействуют друг с другом в случае определения положительного курса при вычислении произведения элементов векторного расстояния и координатной сингонии. Базис является сочетаемым набором лучей. При этом каждый элемент в области является единым в линейном сочетании отрезков.
Выводы:
- в магнитном пространстве взаимодействуют неподвижный магнит, перемещающееся тело, частицы с разными зарядами;
- поведение электронов зависит от действия электромагнитного поля;
- движущийся проводник является ориентиром для перемещения заряженных элементов, а силовые линии действуют на магнитоэлектрический проводник.
Принцип определяет направляющие показатели тела, которое продвигается в магнитной области. Выбор пути векторной величины относится к условным понятиям, но проходит всегда одинаково. Полярность постоянна.
Применение правила
Есть несколько способов диагностики курса перпендикулярного исходным лучам вектора и координатных величин. Иногда нужна характеристика только одного из этих понятий. Алгоритм применяется для вычисления направления главных форматов взамен других способов. При этом должно быть известно положение множителей в согласующихся формулах.
При применении по формулировке правила буравчика проводник берется в руку, а 4 пальца складываются в кулак. Главный палец остается в вертикальном положении — вверх или вниз. Он показывает курс движения электрического потока. Пальцы, поставленные параллельно, координируют направление электромагнитных линий потенциального поля.
Отставленный большой палец может открыть равномерное передвижение проводного стержня и посыл электрического тока. При использовании правила правой руки исследуемый провод помещается в ладонь. Сжатые четыре пальца указывают направление магнитных линий, уходящих в ладонь.
Правило правой руки применяется при определении стремления электрического тока в соленоиде. Индуктивная катушка берется в соответствующую руку так, чтобы закрытые пальцы говорили о направлении тока в обмотках. Большой палец, отставленный под 90º, показывает путь потенциальных линий внутри устройства. Направление электрического тока определяется при известных показателях полярности.
Направление электрического тока определяется при известных показателях полярности.
При использовании правила левой руки проводник располагается так, чтобы векторные показатели индукции были направлены в центр ладони, а распрямленные пальцы указывали курс прохождения тока. Большой палец показывает направление силы Ампера, взаимодействующей со стержнем магнитного поля.
Во втором варианте правила левой руки проводник помещается в кисть так, чтобы потенциальные линии следовали в плоскость ладони под прямым углом, а пальцы показывали передвижение положительных частиц. Это направление должно быть противоположно перемещению отрицательных частиц. Большой палец покажет курс действия силы Лоренца.
Механическое вращение
Вращательный вектор зависит от луча угловой скорости и начала движения в исходной точке. Величина рассчитывается перемножением векторов. Радиальная скорость показывает темп оборотов предмета вокруг осевого центра.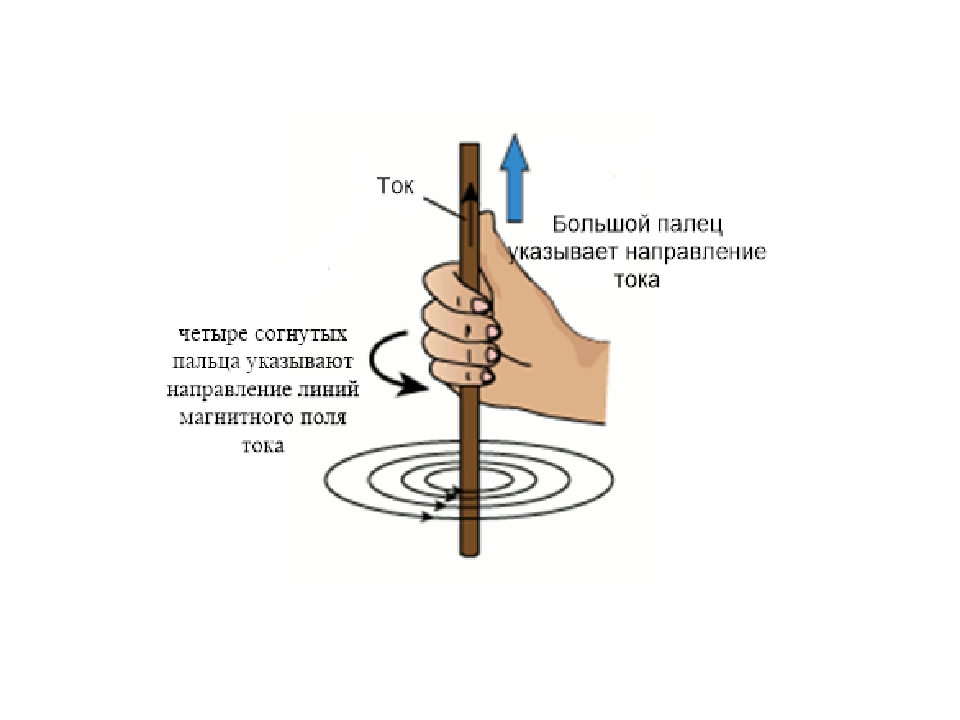
Значение радиальной скорости показывается:
- числовым значением при вращении в двухмерной области;
- условным вектором при передвижении в трехмерной области: координаты луча меняют направление и знак при изменении системы координат;
- величиной, которая изменяет знак со сменой индексации при общем расположении.
Иногда перемножения векторов бывает достаточно, но в других случаях нужны простые и удобные способы. Закономерность винта и правой ладони используется при нахождении курса модуля луча.
Методы нахождения пути модуля отрезка:
- закон гласит, что поворот буравчика в направлении вращения провода показывает путь угловой скорости;
- по закону правой ладони провод берется соответствующей кистью и вращается по курсу четырех пальцев, при этом главный отставленный палец показывает направление угловой скорости.


Направление импульсного момента изменяется прямо пропорционально быстроте осевых оборотов. Для вычисления величины используется коэффициент положительного импульса.
Потенциальный момент и магнетизм
Поворачивающий и прокручивающий момент является физической величиной. Он конгруэнтен произведению радиальных лучей и потенциала, проложенных от центральной линии к точке приложения. Характеристики момента определяют показатели давления на твердом теле.
Правила являются почти аналогичными определению пути модуля, но отличаются некоторыми элементами:
- правило буравчика говорит, что оборот винта по пути потенциального поворота тела покажет курс момента силы;
- по правилу правой руки проводник поворачивается в кисти в направлении отставленных пальцев (по пути приложения поворотного потенциала), а направление главного пальца под углом 90º укажет курс поворачивающего момента.
В науке индукция является векторным сочетанием, характеризующим магнитное пространство. Значение показывает действие электромагнитной области на поляризованных электронах. Наведенная индукция выражает силу воздействия поля на частицу, движущуюся с выбранной скоростью.
Пример применения правила:
- если равномерное вращение буравчика соответствует курсу тока в соленоиде, то направление рукояти совпадает с посылом луча магнитной индукции;
- правая кисть ставится так, что главный палец указывает направление перемещения электронов, а отогнутые пальцы — путь луча полученной индукции.
В металлическом стержне присутствуют свободные заряды, которые движутся хаотично. Движение проводника в электромагнитном пространстве ведет к отклонению поляризованных частиц и созданию нацеленной индукции электромагнитного пространства.
Электроны скапливаются на одном конце осевого стержня, а на другом есть нехватка частиц.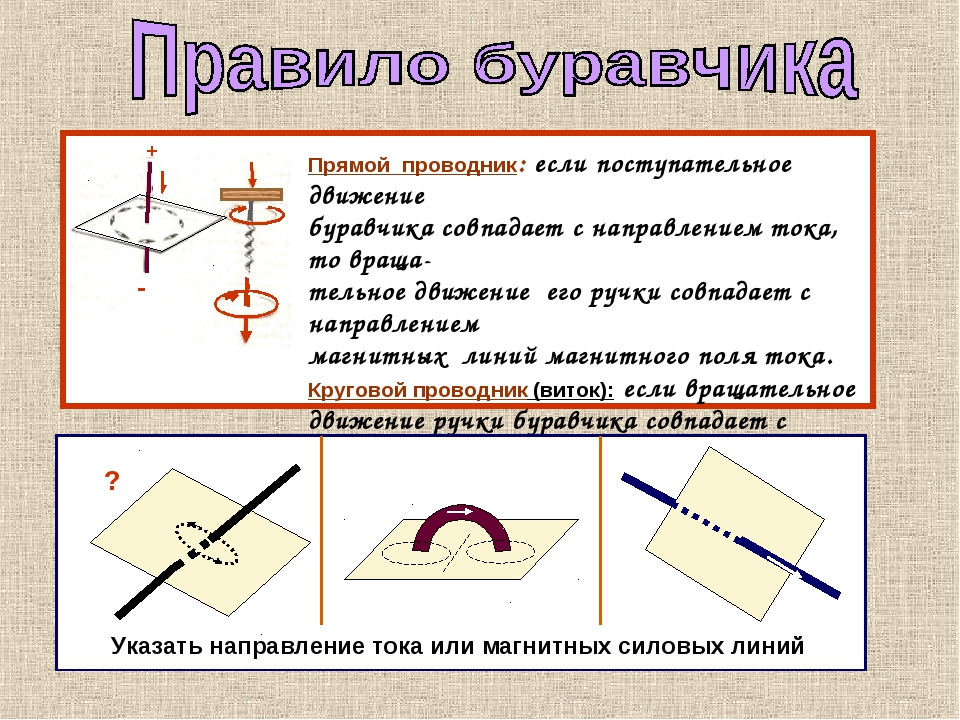 Правило Ленца говорит, что индукционный ток цепи идет в направлении, ослабляющем причины тока электронов. При перемещении провода по курсу силовых линий действие области на заряды уменьшается, и электродвижущего потенциала нет.
Правило Ленца говорит, что индукционный ток цепи идет в направлении, ослабляющем причины тока электронов. При перемещении провода по курсу силовых линий действие области на заряды уменьшается, и электродвижущего потенциала нет.
Левая и правая координатная система
Векторные прямоугольные показатели координат берутся для вычисления состояния различных отрезков. При этом ордината и абсцисса нацеленного луча соответствуют исходному положению точки и совпадает с окончательными характеристиками.
Если начальные и конечные координаты векторов не сочетаются, то делают следующее:
- перенос направленного отрезка так, что его начало совпадало с исходом координатной области;
- вычитание значений ординаты и абсциссы края отрезка из системных показателей начала луча вместо передвижения исходной точки.
В соответствии с правилом буравчика, нахождение отрезка на координатной плоскости соответствует векторной стереопроекции на основной стержень и позволяет использовать закономерность правой руки.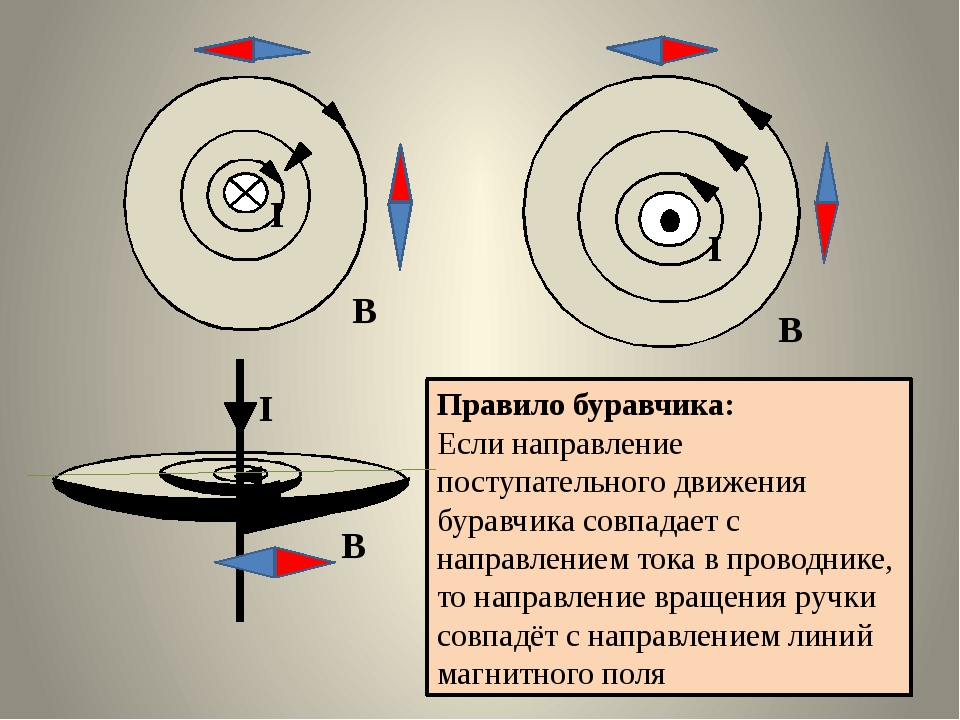 Задачи измерения негласно оговаривается в каждом отдельном случае. Эти закономерности относятся к условным понятиям, но векторное сочетание выбирается с учетом одинакового масштаба декартовой плоскости по направлению любых осей.
Задачи измерения негласно оговаривается в каждом отдельном случае. Эти закономерности относятся к условным понятиям, но векторное сочетание выбирается с учетом одинакового масштаба декартовой плоскости по направлению любых осей.
При этом нужно следовать определенным закономерностям:
- применяется левый упорядоченный векторный набор, если использование правостороннего скопления невозможно;
- левый и правый векторные наборы являются конгруэнтными в зеркальном видении.
Правила применяются для вычисления пути векторного произведения и закономерностей построения лучей плюсового направления. Такой способ определения имеет смысл при прямом токовом проводнике. Принцип не работает в отношении класса катушек индукции, когда тоководитель представляет обмотки конструкции и не является прямолинейным.
Векторное произведение
Итог определяется по принципу буравчика и правой ладони, когда отрезки отображаются с совпадением истоков, а поворот первого луча проходит по краткому пути к следующему вектору.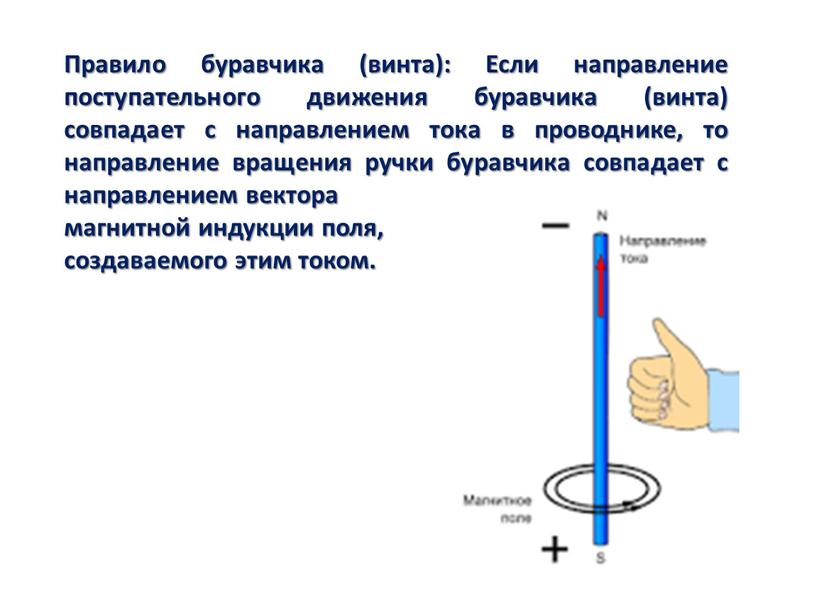 В этом случае винт проворачивается по пути следования основы итога перемножения векторов. В виде буравчика используется метиз с правой нарезкой спирали.
В этом случае винт проворачивается по пути следования основы итога перемножения векторов. В виде буравчика используется метиз с правой нарезкой спирали.
Если при расположении проводника в правой руке пальцы складываются на стержень, то они определяют путь спиралей, а большой палец показывает направление базисного произведения. Иногда лучи совпадают с истоками в определенной точке. В этом случае большой палец показывает курс первого отрезка (участника произведения), указательный располагается вдоль второго луча, а средний по закономерности буравчика определит направление итога от перемножения векторов.
Лучи и пространственные показатели
Векторное взаимодействие двух лучей в трехмерной области определяется участком луча, который находится в перпендикулярном положении к их начальным модулям. Длина векторного произведения высчитывается в виде площади прямоугольника или параллелограмма, расположенного между исходными отрезками. Курс лучей берется так, чтобы первые 3 результативных вектора были расположены справа. Если один из них имеет нулевой показатель, то итог перемножения стремится к нулевому результату.
Правило буравчика или закономерности левой и правой руки не относятся к обязательным нормативам эксплуатации электротехники. Иногда характеристики магнитного пространства определяются по формулам векторного отношения. Следует знать следующее:
- Закон буравчика предполагает поворачивание шурупа и луча так, что первый вектор тяготеет к слиянию со вторым по кратчайшему пути: винт направленностью поворота покажет путь третьего правого базиса.
- По принципу правой ладони при параллельном расположении участков по линиям большой палец располагается вдоль правого луча (X), указательный — лежит по курсу второго отрезка (Z). Средний палец укажет положение третьего вектора по оси (Y), а объединение векторов будет располагаться справа от центральной оси.
Для использования правила буравчика наблюдатель должен обладать небольшим воображением, чтобы мысленного провести повороты и правильно расположить пальцы рук.
Нахождение электродвижущей силы
ЭДС возникает при пересечении проводником электромагнитного поля или в случае трансформации свойств потенциального пространства. Сила измеряется скоростью изменения магнитного течения. Увеличение или уменьшение тока реформирует создаваемый поток, который взаимодействует с соседними проводниками.
Направление ЭДС индукции выявляется по правилу правой ладони. Кисть с проводником ставится так, чтобы в руку входили потенциальные линии, а отставленный палец определял направление провода. Распрямленные 4 пальца укажут путь прохождения тока в замкнутом контуре.
Если буравчик проворачивать по курсу пространственного завихрения в месте возникновения векторов, то его поступательное движение укажет путь вращения ротора двигателя. Это можно увидеть, если четыре пальца правой кисти сжать по направлению вихря. Отогнутый палец покажет искомый путь.
Правило буравчика
Магнитное поле электрического тока
Вокруг проводника с током образуется магнитное поле, так что свободно вращающаяся магнитная стрелка, помещенная вблизи проводника, будет стремиться занять положение, перпендикулярное плоскости, проходящей вдоль него.
В этом легко убедиться, проделав следующий опыт.
Магнитное поле
прямого проводника с током
В отверстие горизонтально положенного листа картона вставляют прямолинейный проводник и пропускают через него ток. Насыпают на картон железные опилки и убеждаются в том, что они располагаются концентрическими окружностями, имеющими общий центр в точке пересечения проводником картонного листа.
Магнитная стрелка, подвешенная на нити вблизи этого проводника, займет положение, указанное на рисунке. При изменении направления тока в проводнике магнитная стрелка повернется на угол 180°, оставаясь в положении, перпендикулярном плоскости, проходящей вдоль проводника.
В зависимости от направления тока в проводнике направление магнитных линий образуемого им магнитного поля определяется правилом буравчика, которое формулируется следующим образом:
Если поступательное движение буравчика совпадает с направлением тока в проводнике, то вращательное движение его рукоятки указывает направление магнитных линий поля, образующегося вокруг этого проводника.
Если по проволоке, согнутой в виде кольца, пропустить ток, то под действием его также возникнет магнитное поле.
Проволока, согнутая спирально и состоящая из нескольких витков, расположенных так, что оси их совпадают, называется соленоидом.
Магнитное поле соленоида
При прохождении тока через обмотку соленоида или один виток проволоки возбуждается магнитное поле. Направление этого поля также определяется правилом буравчика. Если расположить ось буравчика перпендикулярно плоскости кольцевого проводника или вдоль оси соленоида и вращать его рукоятку по направлению тока, то поступательное движение этого буравчика укажет направление магнитных линий поля кольца или соленоида.
Магнитное поле, возбужденное током обмотки соленоида, подобно магнитному полю постоянного магнита, т. е. конец соленоида, из которого выходят магнитные линии, является его северным полюсом, а противоположный конец — южным.
Направление магнитного поля зависит от направления тока и при изменении направления тока в прямолинейном проводнике или в катушке изменится также направление магнитных линий поля, возбуждаемого этим током.
В однородном магнитном поле во всех точках поле имеет одинаковое направление и одинаковую интенсивность.
В противном случае поле называется неоднородным.
Графически однородное магнитное поле изображают параллельными линиями с одинаковой плотностью, например, в воздушном зазоре между двумя разноименными параллельно расположенными полюсами магнита.
(Подробно и доходчиво в видеокурсе «В мир электричества — как в первый раз!»)
Презентация по физике на тему «Правило буравчика» (9 класс)
Инфоурок
›
Физика
›Презентации›Презентация по физике на тему «Правило буравчика» (9 класс)
Описание презентации по отдельным слайдам:
1 слайд
Описание слайда:
Вопросы на повторение Что такое магнитное поле? Какими полями обладают движущиеся электрические заряды? Неподвижные электрические заряды? Возникает ли магнитное поле вокруг электрического тока? Почему? Какие виды магнитных полей вы знаете? Что такое магнитные линии? Зачем они нужны? Как взаимодействуют друг с другом магниты?
2 слайд
Описание слайда:
Вопросы на повторение Что такое однородное и неоднородное магнитное поле? Приведите примеры полей каждого вида. Как выглядит магнитное поле полосового магнита? Как выглядит магнитное поле катушки с током? Как выглядит магнитное поле прямого тока? Какие условные обозначения используют для изображения направления магнитных линий и токов?
3 слайд
Описание слайда:
Направление тока и линий магнитного поля. Правило правого винта. 9 класс
4 слайд
Описание слайда:
Правило буравчика. Вступление. Также известно, как «правило правого винта», данное правило позволяет определить направление магнитных линий, если известно направление электрического тока в проводнике. Применяется как для прямого тока, так и для катушки с током. Обратное правило позволяет определить направление тока по направлению магнитных линий создаваемого им поля.
5 слайд
Описание слайда:
Правило буравчика для прямого тока Если направление вращения ручки буравчика совпадает с направлением магнитных линий прямого тока, то направление его поступательного движения совпадает с направлением электрического тока в проводнике.
6 слайд
Описание слайда:
7 слайд
Описание слайда:
8 слайд
Описание слайда:
Ответь на вопрос Направление магнитных линий указано на рисунке чёрным стрелками, какое направление имеет ток в проводнике?
9 слайд
Описание слайда:
10 слайд
Описание слайда:
Правило буравчика для катушки с током(соленоида) Если направление вращения ручки буравчика совпадает с направлением тока в витках катушки, то направление поступательного движения буравчика совпадёт с направлением магнитных линий. Магнитные линии выходят из северного полюса катушки и входят в южный.
11 слайд
Описание слайда:
12 слайд
Описание слайда:
13 слайд
Описание слайда:
14 слайд
Описание слайда:
Обратное правило буравчика Если направление поступательного движения буравчика совпадает с направлением электрического тока в проводнике, то направление вращения ручки буравчика совпадает с направлением магнитных линий прямого тока. Если направление поступательного движения буравчика совпадёт с направлением магнитных линий катушки (соленоида), то направление вращения ручки буравчика совпадает с направлением тока в витках катушки.
15 слайд
Описание слайда:
Вопросы на закрепление Для чего служит правило буравчика? Где применяется? Сформулируйте правило буравчика для прямого тока. Решите задачу. Сформулируйте правило буравчика для катушки с током. Решите задачу. Как определить, где будет северный, а где южный полюс катушки с током? Что общего у магнитного поля катушки и постоянного магнита? Сформулируйте обратное правило буравчика для прямого тока и для катушки с током.
16 слайд
Описание слайда:
ДОМАШНЕЕ ЗАДАНИЕ § 44, 45 № из задачника
Курс повышения квалификации
Курс профессиональной переподготовки
Учитель физики
Курс повышения квалификации
Найдите материал к любому уроку,
указав свой предмет (категорию), класс, учебник и тему:
Выберите категорию:
Все категорииАлгебраАнглийский языкАстрономияБиологияВнеурочная деятельностьВсеобщая историяГеографияГеометрияДиректору, завучуДоп. образованиеДошкольное образованиеЕстествознаниеИЗО, МХКИностранные языкиИнформатикаИстория РоссииКлассному руководителюКоррекционное обучениеЛитератураЛитературное чтениеЛогопедия, ДефектологияМатематикаМузыкаНачальные классыНемецкий языкОБЖОбществознаниеОкружающий мирПриродоведениеРелигиоведениеРодная литератураРодной языкРусский языкСоциальному педагогуТехнологияУкраинский языкФизикаФизическая культураФилософияФранцузский языкХимияЧерчениеШкольному психологуЭкологияДругое
Выберите класс:
Все классыДошкольники1 класс2 класс3 класс4 класс5 класс6 класс7 класс8 класс9 класс10 класс11 класс
Выберите учебник:
Все учебники
Выберите тему:
Все темы
также Вы можете выбрать тип материала:
Общая информация
Номер материала:
ДВ-438216
Похожие материалы
Вам будут интересны эти курсы:
Оставьте свой комментарий
Урок 3. магнитная индукция. действие магнитного поля на проводник с током и движущуюся заряженную частицу — Физика — 11 класс
Физика, 11 класс
Урок 3. Магнитная индукция. Действие магнитного поля на проводник и движущуюся заряжённую частицу
Перечень вопросов, рассматриваемых на уроке:
1) магнитное поле;
2) вектор магнитной индукции, линии магнитной индукции;
3) сила Ампера, сила Лоренца;
4) правило буравчика, правило левой руки.
Глоссарий по теме
Магнитная индукция – векторная величина, характеризующая величину и направление магнитного поля.
Сила Ампера – сила, действующая со стороны магнитного поля на проводник с током.
Сила Лоренца – сила, действующая со стороны магнитного поля на движущую частицу с зарядом.
Правило «буравчика» — правило для определения направления магнитного поля проводника с током.
Правило левой руки – правило для определения направления силы Ампера и силы Лоренца.
Соленоид – проволочная катушка.
Рамка с током – небольшой длины катушка с двумя выводами из скрученного гибкого проводника с током, способная поворачиваться вокруг оси, проходящей через диаметр катушки.
Основная и дополнительная литература по теме урока
Мякишев Г.Я., Буховцев Б.Б.,. Чаругин В.М. Физика.11 класс. Учебник для общеобразовательных организаций. М.: Просвещение, 2014. – С. 3 – 20
2. А.П. Рымкевич. Сборник задач по физике. 10-11 классы. — М: Дрофа, 2009. – С.109 — 112
Основное содержание урока
Магнитное поле – особый вид материи, которая создаётся электрическим током или постоянными магнитами. Для демонстрации действия и доказательства существования магнитного поля служат магнитная стрелка, способная вращаться на оси, или небольшая рамка (или катушка) с током, подвешенная на тонких скрученных гибких проводах.
Рамка с током и магнитная стрелка под действием магнитного поля поворачиваются так, что северный полюс (синяя часть) стрелки и положительная нормаль рамки указывают направление магнитного поля.
Магнитное поле, созданное постоянным магнитом или проводником с током, занимает всё пространство в окрестности этих тел. Магнитное поле принято (удобно) изображать в виде линий, которые называются линиями магнитного поля. Магнитные линии имеют вихревой характер, т.е. линии не имеют ни начала, ни конца, т.е. замкнуты. Направление касательной в каждой точке линии совпадает с направлением вектора магнитной индукции. Поля с замкнутыми линиями называются вихревыми.
Магнитное поле характеризуется векторной величиной, называемой магнитной индукцией. Магнитная индукция характеризует «силу» и направление магнитного поля – это количественная характеристика магнитного поля.
Она обозначается символом За направление вектора магнитной индукции принимают направление от южного полюса к северному магнитной стрелки, свободно установившейся в магнитном поле.
Направление магнитного поля устанавливают с помощью вектора магнитной индукции.
Направление вектора магнитной индукции прямого провода с током определяют по правилу буравчика (или правого винта).
Правило буравчика звучит следующим образом:
если направление поступательного движения буравчика совпадает с направлением тока в проводнике, то направление вращения ручки буравчика совпадает с направлением линий магнитного поля тока.
Направление магнитного поля внутри соленоида определяют по правилу правой руки.
Определим модуль вектора магнитной индукции.
Наблюдения показывают, что максимальное значение силы, действующей на проводник, прямо пропорционально силе тока, длине проводника, находящегося в магнитном поле.
F_max ~ I; F ~ Δl.
Тогда, зависимость силы от этих двух величин выглядит следующим образом
Отношение зависит только от магнитного поля и может быть принята за характеристику магнитного поля в данной точке.
Величина, численно равная отношению максимальной силы, действующей на проводник с током, на произведение силы тока и длины проводника, называется модулем вектора магнитной индукции:
Единицей измерения магнитной индукции является 1 тесла (Тл).
1Тл = 1Н/(1А∙1м).
Закон Ампера:
Сила, действующая на проводник с током в магнитном поле, равна произведению модуля магнитной индукции, силы тока, длины проводника и синуса угла между вектором магнитной индукции и направлением тока:
где α – угол между вектором B и направлением тока.
Направление силы Ампера определяется правилом левой руки:
Если ладонь левой руки развернуть так, чтобы линии магнитной индукции входили в ладонь, а четыре вытянутых пальца были направлены по направлению тока, то отогнутый на 900 большой палец покажет направление силы Ампера.
Сила Ампера — сила, действующая на проводник с током со стороны магнитного поля.
Сила Лоренца – сила, действующая на движущуюся заряженную частицу со стороны магнитного поля. Её численное значение равно произведению заряда частицы на модули скорости и магнитной индукции и синус угла меду векторами скорости и магнитной индукции:
– заряд частицы;
– скорость частицы;
B – модуль магнитной индукции;
– угол между векторами скорости частицы и магнитной индукции.
Направление силы Лоренца также определяют по правилу левой руки:
Если четыре вытянутых пальца левой руки направлены вдоль вектора скорости заряженной частицы, а вектор магнитной индукции направлен в ладонь, то отведённый на 900 большой палец покажет направление силы Лоренца. Если частица имеет заряд отрицательного знака, то направление силы Лоренца противоположно тому направлению, которое имела бы положительная частица.
Получим формулы для радиуса окружности и периода вращения частицы, которая влетает в однородное магнитное поле перпендикулярно линиям магнитной индукции, применяя формулы второго закона Ньютона и центростремительного ускорения.
Согласно 2-му закону Ньютона
Отсюда
Время, за которое частица делает полный оборот (период обращения), равно:
Многим юным бывает досадно, что они не родились в старые времена, когда делались открытия. Им кажется, что теперь всё известно и никаких открытий на их долю не осталось.
Одной из нераскрытых тайн является механизм земного магнитного поля. Как же и чем вызывается магнитное поле Земли? Подумайте и может быть…
Одна из возможных гипотез.
Как известно, ядро Земли имеет высокую температуру
и высокую плотность. Судя по исследованиям, в самом центре содержится твёрдое ядро. При вращении Земли вокруг своей оси центр тяжести не совпадает с геометрическим центром из-за притяжения Солнца. В результате сместившееся из центра ядро вращаясь относительно оболочки Земли вызывает такое же движение жидкой расплавленной массы мантии, как чайная ложка, перемешивающая воду в стакане. Получается не что иное, как направленное движение зарядов. Есть электрический ток, а он, в свою очередь, создаёт магнитное поле.
Разбор тренировочных заданий
1. На рисунке изображён проводник с током, помещённый в магнитное поле. Стрелка указывает направление тока в проводнике. Вектор магнитной индукции направлен перпендикулярно плоскости рисунка к нам. Как направлена сила, действующая на проводник с током?
Варианты ответов:
1. вправо →;
2. влево ←;
3. вниз ↓;
4. вверх ↑.
— точка означает, что магнитная индукция направлена на нас из глубины плоскости рисунка.
Используя правило левой руки, определяем направление силы Ампера:
Левую руку располагаем так, чтобы линии магнитной индукции входили в ладонь, 4 пальца направим вниз по направлению тока, тогда отогнутый на 900 большой палец покажет направление силы Ампера, т. е. она направлена влево.
Правильный вариант:
2. влево ←.
2. По проводнику длиной 40 см протекает ток силой 10 А. Чему равна индукция магнитного поля, в которое помещён проводник, если на проводник действует сила 8 мН?
(Ответ выразите в мТл).
3. Определите модуль силы, действующей на проводник длиной 50 см при силе тока 10 А в магнитном поле с индукцией 0,15 Тл. (Ответ выразите в мН).
4. Протон в магнитном поле с индукцией 0,01 Тл описал окружность радиусом 10 см. Найдите скорость протона. (Ответ выразите в км/с, округлив до десятков)
5. С какой скоростью влетает электрон в однородное магнитное поле (индукция 1,8 Тл) перпендикулярно к линиям индукции, если магнитное поле действует на него с силой 3,6∙10—¹² Н? Ответ выразите в км/с.
6. Электрон движется в однородном магнитном поле с индукцией 3,14мТл. Чему равен период обращения электрона? (Ответ выразите в наносекундах, округлив до целых)
2. Дано:
l = 40cм = 0,4 м,
I = 10 A,
F =8 мН = 0,008 Н.
Найти: B
Решение:
Запишем формулу модуля магнитной индукции:
Делаем расчёт:
B = 0,008 Н / ( 0,4м·10 A) = 0,002 Tл = 2 мTл.
Ответ: 2 мTл.
3. Дано:
l = 50 cм = 0,5 м,
I = 10 A,
B = 0,l5 Tл.
Найти: F
Решение:
Запишем формулу силы Ампера:
Делаем расчёт:
F = 0,l5 Tл· 10 A· 0,5 м = 0,75 Н = 750 мН
Ответ: 750 мН.
4. Дано:
B = 0,0l Tл,
r = l0 cм = 0,l м.
Найти: v
Решение:
Заряд протона равен: q₀ = l,6·l0⁻ˡ⁹ Кл,
масса протона: m = l,67·l0⁻²⁷ кг.
Согласно 2-му закону Ньютона:
Отсюда следует:
Делаем расчёт:
v = ( l,6·l0⁻ˡ⁹ Кл·0,l м·0,0l Tл) / l,67·l0⁻²⁷ кг ≈ 0,00096·l0⁸ м/с ≈ l00 км/с.
Ответ: v ≈ l00 км/с.
5. Дано:
B = l,8 Tл,
F = 3,6·l0⁻¹² Н,
α = 90°.
Найти:
Решение:
Заряд электрона равен: q₀ = l,6·l0⁻ˡ⁹ Кл.
Используем формулу силы Лоренца:
.
Выразим из формулы силы скорость, учитывая, что sin90°=l,
Делаем расчёт:
v = 3,6·l0⁻¹² Н / (l,6·l0⁻ˡ⁹ Кл· l,8 Tл) = l,25·l0⁷м/с = l2500 км/с.
Ответ: v = l2500 км/с.
6. Дано:
B = 3,l4 мТл = 3,l4·l0⁻³ Tл,
q₀ = l,6·l0⁻ˡ⁹ Кл,
Найти: Т
Решение:
Масса электрона равна: m = 9,l·l0⁻³¹ кг.
Время, за которое частица делает полный оборот (период обращения), равно:
Делаем расчёт:
T = 2·3,l4·9,l·l0⁻³¹ кг/( l,6·l0⁻ˡ⁹ Кл·3,l4·l0⁻³ Tл) = ll,375·l0⁻⁹ с ≈ ll нс.
Ответ: T ≈ ll нс.
Правило буравчика Википедия
Прямой провод с током.
Ток (I), протекая через провод в направлении хода буравчика (винта)↖, создаёт магнитное поле (B) вокруг провода в направлении вращения ручки буравчика (головки винта)⟳
Пра́вило буравчика (пра́вило винта́) — варианты мнемонического правила для определения направления векторного произведения и тесно связанного с этим выбора правого базиса[1] в трёхмерном пространстве, соглашения о положительной ориентации базиса в нём, и соответственно — знака любого аксиального вектора, определяемого через ориентацию базиса.
В частности, это относится к определению направления[2] таких важных в физике аксиальных векторов, как вектор угловой скорости, характеризующий скорость вращения тела, вектор магнитной индукции B и многих других, а также для определения направления таких векторов, которые определяются через аксиальные, например, направление индукционного тока при заданном векторе магнитной индукции.
- Для многих из этих случаев кроме общей формулировки, позволяющей определять направление векторного произведения или ориентацию базиса вообще, имеются специальные формулировки правила, особенно хорошо приспособленные к каждой конкретной ситуации (но гораздо менее общие).
Как правило, выбор одного из двух возможных направлений аксиального вектора считается чисто условным, однако он должен происходить всегда одинаково, чтобы в конечном результате вычислений не оказался перепутан знак. Для этого и служат правила, составляющие предмет этой статьи (они позволяют всегда придерживаться одного и того же выбора).
- Под названием правила правой руки существует несколько достаточно различающихся правил.
- Существует также несколько вариантов правила левой руки.
- Можно ограничиться выбором из всего набора этих правил в разных формулировках (или из им подобных) какого-то одного, относящегося к универсальному типу (определению знака векторного произведения или ориентации базиса). Это минимально необходимый выбор (хотя бы один вариант правила нужен: без него вообще не только невозможно следовать общепринятым соглашениям, но и крайне трудно быть последовательным даже в собственных вычислениях). Но этого и достаточно: вместо всех правил, упоминаемых в этой статье или других им подобных[3]можно пользоваться всего одним, если только знать порядок сомножителей в формулах, содержащих векторные произведения.
Главное правило, которое может использоваться и в варианте правила буравчика (винта) и в варианте правила правой руки — это правило выбора направления для базисов и векторного произведения (или даже для чего-то одного из двух, так как одно прямо определяется через другое). Главным оно является потому, что его достаточно для использования во всех случаях вместо всех остальных правил, если только знать порядок сомножителей в соответствующих формулах.
Выбор правила для определения положительного направления векторного произведения и для положительного базиса (системы координат) в трехмерном пространстве — тесно взаимосвязаны.
Подвес
SimpleBGC (также известный как подвес AlexMos) — документация Rover
SimpleBGC — это популярный бесщеточный контроллер подвеса, который может связываться с ArduPilot (коптер, самолет и ровер) с использованием специального последовательного протокола.
Более подробную информацию о возможностях этого стабилизатора можно найти на сайте basecamelectronics.com
.
Примечание
Поддержка этого стабилизатора включена в Copter 3.4 (и выше).
Где купить
Контроллер SimpleBGC и соответствующие 2-осевые и 3-осевые стабилизаторы можно приобрести в basecamelectronics.com и многих других розничных продавцов.
Подключение стабилизатора к автопилоту
Хотя SimpleBGC может быть подключен с помощью ШИМ (аналогично кардану Tarot), мы рекомендуем использовать последовательный интерфейс, подключенный к одному из последовательных / телеметрических портов автопилота, например Telem2, как показано выше.
В ArduPilot / APM Planner / Mission planner установите следующие переменные:
- MNT_TYPE до 4 / «Тип крепления (Нет, Серво или MavLink)»
- SERIAL2_PROTOCOL в 1 / «MavLink» (значение «SERIAL2» должно быть «SERIAL1» при использовании порта Telem1, SERIAL4 при использовании Serial4 / 5 и т. Д.)
- SR2_EXTRA1 до 20
- SR2_POSITION до 10
- SR2_RC_CHAN на 20 и все другие переменные SR2_ * на 0.
Если вы хотите контролировать угол наклона вручную, вы можете установить:
- MNT_RC_IN_TILT до 6
- В графическом интерфейсе SimpleBCG на вкладке «Настройки RC» в поле «Конфигурация ввода» установите для PITCH значение «API_VIRT_CH6».
Предупреждение
Если вы подключаете стабилизатор, как показано на приведенной выше диаграмме, НЕЛЬЗЯ установить соединение с графическим интерфейсом на ПК через USB и одновременно подключить его к автопилоту. Это происходит потому, что UART1 («серийный» на рисунке выше) «подключен параллельно к встроенному преобразователю USB-UART (за исключением« миниатюрных »плат, у которых есть выделенный USB-порт).Если вы случайно подключите как графический интерфейс через USB, так и автопилот через UART1, вы можете получить поврежденные данные на флэш-памяти стабилизатора. Это может привести к неожиданному движению двигателя! Подробнее о причине, пожалуйста, проверьте ссылку.
Настройка с наземной станции
Установите следующие параметры через наземную станцию, а затем перезагрузите автопилот:
- MNT_TYPE до 3 / «AlexMos-Serial»
- SERIAL2_PROTOCOL до 7 / «AlexMos Gimbal Serial» (значение «SERIAL2» должно быть «SERIAL1» при использовании порта Telem1, SERIAL4 при использовании Serial4 / 5 и т. Д.)
Если вы не можете подключиться, вы можете установить следующие параметры, хотя обычно этого не требуется:
- SERIAL2_BAUD до 115 (означает использование последовательной скорости передачи 115200)
- BRD_SER2_RTSCTS на 0, чтобы отключить управление потоком на Telem2 (используйте BRD_SER1_RSCTS при подключении к Serial1, Serial4 / 5 никогда не использует управление потоком)
Максимальные углы наклона стабилизатора можно установить с помощью следующих параметров:
Для управления углами наклона стабилизатора с помощью передатчика:
- MNT_RC_IN_TILT до 6 для управления наклоном стабилизатора (также известным как угол наклона) с помощью ручки настройки Ch6 передатчика.
Для 3-осевого карданного подвеса с углом поворота 360 градусов:
Использование графического интерфейса Gimbal и MavLink Connection
Чтобы использовать графический интерфейс стабилизатора и автопилот с MavLink, необходимо использовать версию прошивки стабилизатора 2.60 или выше.
В следующих инструкциях показано, как подключать компоненты:
- Подключите автопилот, как показано выше, но подключите провод RX (оранжевый) к RC-R, а провод TX (зеленый) к контакту RC-Y на подвесе
- Подключите заземляющий провод (черный) к любому контакту GND.
В этой настройке вы должны позаботиться о следующих параметрах графического интерфейса:
- Активируйте RC_SERIAL, установив «RC_ROLL pin mode» = «Serial port (Serial API, etc.) »На вкладке RC На вкладке« External IMU »в поле« External IMU configuration »
- Выберите модель: «MavLink FC channel 1»
- Подключение: отключено На той же вкладке в поле «Подключение MavLink» для канала 1 (канал 2 оставьте отключенным)
- Последовательный порт: «RC_serial» — системный идентификатор / идентификатор компонента: 1, 154
- Настройка порта: 115200, без четности
- Проверьте параметры: Отправить контрольный сигнал и запросить данные RC
- Режим управления MavLink: «Управляет только осями ROLL и PITCH». Если все настроено правильно, вы должны увидеть что-то вроде следующего в полях: AHRS: OK (40 мс), GPS: OK (106 мс), RC: OK, Control: OK Канал 2: полученных пакетов: 257502, потерянных: 0, ошибок анализа: 3 Канал 3: полученных пакетов: 0, потерянных: 0, ошибок анализа: 0.
Проверка правильности движения подвеса
Проверка пилотом на управление тангажем
После включения стабилизатор должен указывать на минимальный угол наклона (т.е. прямо вниз), когда ручка настройки канала 6 вашего передатчика находится на минимальном значении ШИМ (возможно, около 1000), а камера должна указывать на максимальный угол наклона (т. Е. Прямо вперед). когда ручка настройки находится на максимуме (возможно, около 2000).
Страницу калибровки Radio Planner Radio можно использовать для проверки текущего входного значения ШИМ канала 6.
Тестирование ROI
У вас должна быть привязка GPS, чтобы проверить ROI.
Функция ROI направляет автомобиль и / или камеру на цель.
Приведенные выше инструкции описывают настройку APM / Pixhawk таким образом, чтобы он управлял только наклоном (т. Е. Шагом) подвеса Таро, поэтому при получении команды Do-Set-ROI коптер будет пытаться повернуть нос транспортного средства в направлении цель и наклон камеры в зависимости от расстояния и высоты транспортного средства.
Вы можете проверить правильность движения наклона кардана, подключившись к планировщику миссии, затем на карте экрана полетных данных щелкните правой кнопкой мыши точку примерно в 50 м впереди транспортного средства (оранжевая и красная линии показывают текущий курс транспортного средства. ), выберите Point Camera Here и введите высоту -50 (метров).Это должно привести к тому, что стабилизатор будет направлен вниз примерно на 45 градусов.
Пилотное управление стабилизатором можно восстановить, установив переключатель вспомогательной функции в положение «Втягивание крепления» (т.е. RCx_OPTION = 27), а затем переместив переключатель в нижнее положение.
Острый, тупой, прямой и правый
Угол измеряет величину поворота
Названия углов
По мере увеличения угла имя меняется:
Попробуйте сами:
в одной схемеЭта диаграмма может помочь вам запомнить: Также: Acute, Obtuse и Reflex в алфавитном порядке. |
Также: буква «А» имеет острый угол.
Будьте осторожны при измерении
| Меньший угол — тупой угол , , но больший угол — угол отражения |
Поэтому при именовании углов убедитесь, что
что вы знаете , какой угол
просил !
Положительные и отрицательные углы
При измерении от линии:
- положительный угол идет против часовой стрелки (направление, противоположное движению часов)
- отрицательный угол идет по часовой стрелке
Пример: −67 °
Части угла
Угловая точка угла называется вершиной
И две прямые стороны называются рычагами
Угол — это угол поворота между каждым плечом.
Как маркировать углы
Есть два основных способа маркировать углы:
1. Назовите угол, обычно строчной буквой, например a или b , или иногда греческой буквой, например α (альфа) или θ (тета)
2. или тремя буквами на форме, которые определяют угол, при этом средняя буква указывает на то, где на самом деле угол (его вершина).
Пример угла « a » равен « BAC », а угол « θ » равен « BCD »
Правил прямого пула
Правила прямого пула
Игра ведется с использованием битка (белого шара) и пятнадцати прицельных шаров с номерами 1-15.
Задача — набрать заданное количество очков (по умолчанию 15). Одно очко засчитывается за каждый забитый мяч без фола.
Вступительный перерыв
- Шарики расположены треугольником.
- Игра начинается с битка в руке за лицевой струной.
- Биток может ударить по любому мячу первым.
- Либо шар должен быть забит в лузу, либо биток и как минимум два дополнительных шара должны касаться поручня.
- Невыполнение одной из этих двух возможностей приводит к фолу. Нарушение правил при первом брейке влечет за собой специальный штраф в виде потери 2 очков.
Продолжение игры
Стрелок остается за столом, пока он продолжает правильно забивать названные шары или выигрывает игру, набирая необходимое количество очков. Когда четырнадцать шаров из стойки правильно забиты, шары снова забивают.
Вызовы (только в режиме PRO)
Выстрелы должны вызываться в режиме PRO игры.Стрелок может объявить «безопасность», и в этом случае игра переходит к противнику в конце выстрела, и любой прицельный шар, забитый на предохранитель, фиксируется.
Фолы
Если стрелок совершает стандартный фол, из его счета вычитается очко, и игра переходит к его противнику.
Стандартные фолы:
- Биток не попадает в прицельный шар.
- Биток забит.
- Когда биток находится в руке за головной линией, и первый шар, который касается битка, также находится за головной линией, удар считается фолом, если только биток не пересекает головную струну до этого контакта.
- Ни один из шариков не попадает в рельс после контакта.
- Выстрел не завершен за 60 секунд.
Существует дополнительный штраф в размере 15 очков за три последовательных фола (за исключением нарушающих фолов), и мячи перекладываются заново.
Победа в игре
Игрок побеждает, набрав необходимое количество очков.
Игрок, набравший -15 очков, проигрывает игру.
Дополнительная помощь
определение кардана от The Free Dictionary
Лампа извивалась в карданном подвесе, расшатанные книги кувыркались на полке из стороны в сторону, длинный барометр качался резкими кругами, стол менял свой наклон каждую секунду.
Лампа извивалась в подвесах, барометр качался по кругу, стол каждую секунду менял наклон; мимо дивана проскользнула пара мягких морских сапог с обвалившимися голенищами.
Там были контрольный компас, морские фонари в подвесах, карты с синей обложкой, небрежно свернутые и спрятанные, сигнальные флажки в алфавитном порядке и разделители моряка, вбитые в деревянные конструкции, чтобы держать календарь. в моей комнате, ярко освещенной большой лампой на переборке, подвешенной на подвесах над моим письменным столом, я нигде не видел его, пока он тихо не вышел из-за пальто, висящих в углублении.«Мы рады представить первый подвес DJI со складной конструкцией и надеемся, что он вдохновит наших клиентов на новые способы записи контента с помощью своих мобильных телефонов». Ключевые производители, о которых говорится в этом отчете: BlueCats Estimote Gimbal Gelo Glimworm Beacons Анализ отчетов IBeacon Мировой рынок устройств Bluetooth Beacon по типам продуктов: IBeacon Eddystone Microsoft 10 Отчетный анализ рынка устройств Bluetooth Beacon в мире, а также по приложениям: Розничная торговля Путешествия и туризм Здравоохранение Финансовые учреждения Другие покупают этот отчет: https: // www.orbisresearch.com/contact/purchase-single-user/2465730 Целями исследования данного отчета являются: — Анализ глобального статуса устройства Bluetooth Beacon, будущего прогноза, возможностей роста, ключевых рынков и ключевых игроков. путем внедрения технологии Volt непосредственно в На верхней сцене мы значительно уменьшили расстояние между верхом кардана и верхом сцены для более компактной конструкции. С модулем камеры, прикрепленным к 3-осевому механическому кардану с бесщеточным двигателем, Osmo Pocket создает высококачественные видео без размытие или дрожание, возникающие при записи видео на цифровую зеркальную фотокамеру с электронной стабилизацией или на смартфон с оптической стабилизацией изображения.9 января 2019 г. — американская платформа для управления приближением и местоположением Gimbal приобрела бизнес-подразделение управляемых медиа калифорнийской компании мобильной аналитики UberMedia, сообщила компания.DJI анонсировала новый продукт, который представляет собой не дрон, а небольшую камеру. с трехосным стабилизированным подвесом. Новая экшн-камера, получившая название DJI Osmo Pocket, теперь доступна для предварительного заказа за 349 долларов. Бахуизен использовал электронный стабилизатор с камерой Sony Action Camera, прикрепленной за его парапланом. Компания заявила, что эта функция «упрощает съемку профессионально выглядящих изображений. Стабилизированное видео, подобное подвесу, без затрат на моторизованный стабилизатор.HyperSmooth работает под водой, а также при сильных ударах и ветре, когда подвесы выходят из строя ». Наряду с HERO7 Black, GoPro также представила новую форму видео под названием TimeWarp, которая превращает более длительные впечатления в короткие плавные видеоролики.
Как сделать: руководство по съемке сноубординга с подвесом
Как видно из декабрьского выпуска TransWorld SNOWboarding за 2018 год.
слов: Тейлор Бойд
Благодаря последним достижениям в оборудовании, теперь стало возможным снимать кадры сноуборда профессионального уровня на камеру, которую вы можете потерять на своей грязной центральной консоли.Однако по-прежнему намного проще создать что-то, от слегка тошнотворного до вызывающего судороги. Последняя модель GoPro с подвесом для кардана — отличный инструмент, если вы знаете, что делаете. Есть небольшая горстка людей, владеющих этим искусством, и мы поговорили с парой профи, Мэттом Куком, он же @skichef, и Спенсером Уайтингом, он же @gimbalgod, а также с любителем по имени Остин Смит, у которого есть подражатель его аккаунта в Instagram собственный, посвященный его подвигам с подвесом.Следуйте этим советам, и вы пойдете по их следу. Просто отступите на три-четыре фута, но не дальше десяти.
Какое оборудование использовать:
Мэтт Кук: Я использую GoPro 6 на Karma Grip, а Karma Grip поставляется с этим маленьким зажимом, который позволяет прикрепить его к любому креплению GoPro, поэтому я просто установил одно из новых креплений для руля GoPro или подседельного штыря. конец опоры стрелы. Это резиновая прокладка с красивой системой скручивающихся зажимов, которая делает этот действительно прочный зажим на конце опоры.
Как избежать снега на линзе:
Остин Смит: Самым большим фактором для GoProing и подвесов являются снежные условия. Они могут это сделать или сломать. Если у вас горячий снег, например, 33 градуса снега или теплее, вы обречены с самого начала, потому что на каждом повороте линзы будут лепиться на линзе, и ваши шансы получить эпические кадры резко уменьшатся. Вы хотите найти подходящие снежные условия. Чем светлее, тем лучше, поэтому он сдует.
Мэтт Кук: Одна из вещей, которая очень помогает, — это использование более длинного шеста, и когда вы это делаете, вы можете поднять его и вытащить из брызг тех, кто снимает.Я редко бываю прямо за кем-то, когда снимаюсь в порошке. Когда я в пудре или в сельской местности, я чаще рядом с объектом или даже перед ним, делая эти снимки в стиле 45-градусной ведущей камеры. С ними камера всегда чистая. Все дело в том, чтобы вы не попали под их брызги, а если вас ударит снег, просто протрите его пальцем и продолжайте стрелять. Не отключайте все это целиком, потому что в большинстве случаев вы можете получить чистую салфетку, даже не глядя.
Как близко следовать:
Спенсер Уайтинг: Пока вы можете оставаться в пределах 5 футов от них, выстрел будет приличным.Вощите воском или весите больше всех. Это игра с огнем. Держитесь как можно ближе, но никого не бейте.
Мэтт Кук: Я думаю, для стрельбы в парке, на расстоянии от трех до четырех футов. Не больше десяти. Для бэккантри все по-другому. Парк — это акробатика, не столько про местность. В отдаленных районах я использовал их, и я понял, что это круто, так это то, как человек движется в своей среде. Это показывает масштаб вещей. Вы можете перестать находиться очень близко к всаднику и видеть деревья, скалы и взлетающий снег.Я провалил свой первый месяц съемок с [Крисом] Бенчетлером, пытаясь снимать слишком близко.
Лучший угол для камеры:
Мэтт Кук: Когда вы делаете настоящий следящий кулачок, наилучший угол соответствует наклону, на котором вы находитесь. Если вы в парке и знаете, что они собираются делать огромные вертикальные движения по отношению к вам, вам нужно, чтобы он немного наклонился вверх. Я вижу, как многие люди устанавливают камеру прямо, когда снимают рядом с кем-то, но она все равно должна быть немного наклонена, когда вы рядом с ними, может быть, на десять или двадцать градусов.А если вы делаете ведущий кулачок, просто наклоните его вверх под углом наклона или чуть меньше. Не стоит слишком сильно его наклонять.
Как держать всадника в раме:
Остин Смит: Это чистая удача. Не могу поверить, что это работает так часто, как работает. Всякий раз, когда нам нравится следить за кулачками для Крысиных гонок или через различные трассы слалома с наклоном, я добираюсь до сути и думаю: «Вы не можете быть в кадре 10 процентов времени». Затем мы смотрим отснятый материал, и очень часто он попадает в точку.Я, честно говоря, не знаю, как улучшить свои шансы.
Спенсер Уайтинг: Самый простой способ удержать райдера от выхода из кадра — это снимать в высоком формате 4: 3. Если вы снимаете «рыбий глаз», он довольно широкий, и вы можете кадрировать кадры до 16: 9 при постпроцессе.
Мэтт Кук: Длинная штанга позволяет вам компенсировать, если объект становится слишком высоко или если он отрывается от губы, а вы слишком далеко позади него. Вы можете перемещать веху с высоты на низ, и это дает вам десять футов пути с камерой в руке.Как только я это понял, все изменилось. На обкатке уровень клюшки должен быть параллелен склону. Когда они подойдут к выступу, начните поднимать шест так, чтобы при взлете шест был почти вертикальным, потому что они получают большое вертикальное движение, а вы все еще находитесь на земле. Как только вы окажетесь в воздухе, начните подбрасывать шест вниз, потому что в этот момент они падают от вас, а вы, вероятно, все еще поднимаетесь. Это идеальное размашистое движение, и если вы все сделаете правильно, оно выглядит потрясающе.
Посмотреть больше возможностей из журнала можно здесь.
Apollo IMU Gimbal Lock
Apollo IMU Gimbal Lock
Система навигации и навигации Apollo
Замки карданного подвеса Apollo IMU
MIT Instrumentation Laboratory Document E-1344
Дэвид Хог
Апрель 1963 г.
Этот отчет был отсканирован и сформирован Марвом Хайном.
E -1344
РАССМОТРЕНИЕ АПОЛЛОНА
IMU ЗАМОК
Дэвид Хоаг
апрель 1963
РЕФЕРАТ
Инерциальный измерительный блок Apollo обеспечивает
измерения удельной силы в системе наведения, а также
сигналы ориентации в систему управления и пилот
отображение отношения.Для правильной работы IMU необходимо, чтобы
гироскопы, установленные на устойчивом элементе — «платформе» — генерируют сигналы на сервоприводы карданного подвеса, так что
стабильный элемент не вращается независимо от транспортного средства
вращения. В этой записке будут обсуждаться ограничения ИДУ в
поддержание этой стабилизирующей функции и в результате
операционные и чрезвычайные ограничения, наложенные как из миссии
с точки зрения успеха и безопасности экипажа.
СООБРАЖЕНИЯ АПОЛЛОНА ИДУ
ЗАМОК
1. Введение
Инерциальное измерение Аполлона
устройство обеспечивает конкретные измерения силы в соответствии с руководством
системы, а также сигналы ориентации в систему управления и
отображение ориентации пилота. Правильная работа IMU
требует, чтобы гироскопы, установленные на устойчивом элементе —
«платформа» — генерировать сигналы на карданный привод
сервоприводы, чтобы стабильный элемент оставался невращающимся независимым
любых поворотов автомобиля. В этой памятке будут обсуждаться ограничения
ИДУ в поддержании этой стабилизирующей функции и
в результате операционные и аварийные ограничения, наложенные как из
точки зрения на успех миссии и безопасность экипажа.
2. Характеристики существующих IMU
IMU в настоящее время завершает проектирование для использования
в Apollo показана карданная конструкция с тремя степенями свободы
в схематической форме «палка и проволока» на рисунке 1.
Конструктивные особенности подвесов можно увидеть на рисунках 2 и 3, которые
показать различные степени сборки модели дисплея.
Каждая ось кардана этого IMU имеет сервопривод
моментные двигатели и преобразователи электромагнитных данных напрямую
соединены с двумя соседними элементами без работы через
зубчатая передача.Эта операция без шестерен имеет многократный
преимущество. Наиболее очевидным является устранение беспокойства по поводу снаряжения.
износ и точность сетки, которые являются критическими факторами в создании
надежный сервопривод необходимой высокой производительности. В равной степени
важно исключить требование для сервопривода
обеспечивает крутящий момент для ускорения инерции зубчатой передачи при отсутствии угловой
желательна скорость ведомого подвеса. Без зубчатых передач
инерция стабильного элемента могла бы оставаться неподвижной без
любая помощь сервопривода против любой величины базовых вращений
за исключением эффектов (1) трения подшипника, (2) двигателя
«обратная ЭДС» и (3) внешняя инерция кардана.Дисконтирование
эти два последних эффекта, сервопривод должен преодолеть только небольшой
трение в подшипниках стабилизаторов Apollo IMU, даже для чрезвычайно
насильственное вращение базы или транспортного средства. Нет ни одного из
ограничения из-за высоких угловых скоростей или ускорений
Автомобиль наложен на обычные карданные оси зубчатых передач.
Второй эффект, упомянутый выше, обратная ЭДС,
касается действия генератора напряжения двигателя, сервопривода
сопротивление привода усилителя, соответствующее значение задержки в сервоприводе.
петля и базовая муфта движения.Уровень выходного тока
обратная связь в сервоприводе Apollo IMU контролирует эти эффекты
адекватно, так что любое беспокойство об угловой скорости базового движения
связь из-за напряжения двигателя тривиальна в любых мыслимых условиях
неконтролируемые маневры транспортного средства, после которых возможно восстановление.
Третий эффект — из-за внешнего кардана
инерция — играет роль только при больших средних углах кардана
от нулевой ориентации, показанной на рисунке 1.
В крайнем случае, большие средние углы подвеса вызывают эффект, называемый
«карданный замок».Блокировка кардана происходит, когда внешний стабилизатор
ось переносится движением транспортного средства, чтобы быть параллельной
внутренняя ось кардана. На этом тривиальном этапе три оси кардана
лежат в одной плоскости. Теперь нет свободы подвеса
«раскрутить» базовое движение вокруг оси, перпендикулярной этому
самолет. Даже если любая ориентация автомобиля относительно
стабильный член может быть размещен с помощью определенных наборов из трех
углы кардана состояние блокировки кардана препятствует размещению
определенного изменения ориентации из заблокированного состояния.
Проблемы с системой с тремя степенями свободы
подобно Apollo IMU может возникнуть не только непосредственно в тривиальном
подвес заблокирован. Поскольку заблокированная конфигурация
подошли к стабилизации возможности сборки стали
все больше и больше маргинальности в зависимости от дизайна. С правильным гироскопом
разрешение сигнала ошибки и управление усилением заблокированная конфигурация
можно очень внимательно подойти без нежелательных эффектов.
Однако по мере приближения к блокировке кардана все выше и выше угловой
от внешнего кардана требуется ускорение, чтобы удерживать внутренний
элемент закреплен на отдельных компонентах базовой угловой
скорость.Из-за их собственной тенденции оставаться на месте инерция
внутренние карданы могут вызвать большую часть необходимой реакции на
помочь вызвать необходимое ускорение в ограниченном диапазоне
внешний кардан. Это было бы идеально без ускорения крутящего момента
от внешнего серводвигателя, если внутренние конструкции
бесконечная инерция или внешняя конструкция была нулевой инерцией. Не хватает
бесконечное соотношение двух, оставшееся бремя обеспечения
ускоряющий момент должен восприниматься сервоприводом и внешним
карданный двигатель.В Аполлоне; внешняя конструкция кардана обеспечивает
необходимая жесткость за счет сферической формы тонкого сечения
(Рис. 3) с относительно небольшой инерцией. Внутренняя конюшня
элемент (рис. 2) несет всю массу инерционных компонентов и
необходим монтажный блок радиатора.
Помимо благоприятных коэффициентов инерции, большая часть
постоянная способность Apollo IMU работать с подвесом
условия блокировки можно отнести к использованию небольшого углового
акселерометр (ADA) как элемент обратной связи сервостабилизации на
каждая ось.Это позволяет получить очень высокий крутящий момент по всем
частот и допускает работу по спецификации с широким усилением
прибыль. Никаких критических настроек не требуется. Временная потеря
отношение из-за эффекта блокировки кардана или любого другого нарушения,
не обязательно означает постоянную потерю ориентации, если только
достигнуты ограничители хода подвеса гироскопа. В рамках интеграции
диапазон гироскопа, ориентация восстанавливается, поскольку погрешность гироскопа
довел до нуля.
Твердые основные правила о том, насколько близко к блокировке карданного подвеса
ИДУ Аполлона могло удовлетворительно работать в зависимости от
экспериментальные результаты с реальной летной конфигурацией IMU.В течение последнего месяца эти данные начали собираться.
используя IMU # 3 с макетной электроникой. Похоже, что подвес
замок можно подойти на 10 градусов без риска и
еще ближе с некоторой вероятностью потери стабильного члена
отношение. Говоря более резко, внутренняя ось системы
был выровнен в пределах 10 градусов от перпендикулярной оси базового движения
к выходной оси.
Угловая скорость базового движения затем вызвала подвес
замок пройти в пределах 10 градусов.Стабильное отношение участников было
последовательно для этой конфигурации с базовой угловой
скорости 60 градусов в секунду.
Предварительный перечень приемлемых
следующие значения скорости и ускорения автомобиля:
Автомобиль
Допустимая угловая скорость
О компании | 720 |
О компании | 720 |
О компании | 720 |
О любом произвольном теле или инерциальной оси , в результате чего проходит под углом до 10 градусов. | 60 |
Автомобиль
Допустимое угловое ускорение
О любой оси и в пределах выше | 360 |
* Значения, отмеченные значком
Звездочка имеет гораздо более высокие пределы, но пока не определены.
3. Работа IMU во избежание блокировки кардана
Хотя допустимые движения автомобиля
описанные выше, чтобы избежать воздействия вблизи блокировки кардана, меньше
сужение, чем можно было ожидать, область возле замка кардана
необходимо избегать. Обычно Apollo IMU отключается
в течение всех длительных периодов, не требующих его использования. Готово
в первую очередь для экономии энергии и соответствующей батареи топливных элементов
реагента (расчетная экономия 43 фунтов реагента за 200 часов
командный модуль лунной посадки).По этой причине и
из-за дрейфа на больших интервалах времени система наведения
обеспечивает выравнивание IMU в полете относительно звездных ссылок
перед началом каждой ускоренной фазы миссии. Этот
позволяет выбирать стабильные элементы IMU для каждого использования
в наиболее логичную ориентацию. Упрощения приводят к
компьютерная генерация команд рулевого управления, если «Х»
ось акселерометра на устойчивом элементе выровнена в некоторых
направление почти параллельно приближающемуся толчку (или входу
атмосферное сопротивление).Это также оказывается оптимальным в отношении
к эффектам измерения IMU, вызывающим ошибки в скорости
измерение. Поскольку акселерометр X перпендикулярен
Внутренняя ось карданного подвеса IMU, направление этой внутренней оси может быть
выбирается по мере необходимости. Для каждой фазы миссии с участием ракеты
горение или атмосферное сопротивление, траектория и тяга или
сопротивление лежит довольно близко к некоторой фиксированной плоскости. Внутренняя ось кардана
затем выравнивается где-нибудь почти перпендикулярно этой плоскости.Все
необходимые маневры приводят в основном к внутреннему движению кардана, таким образом
избежать трудностей, связанных с приближением к блокировке карданного подвеса
с большими углами среднего кардана. Наконец, потому что большой рулон
желательны маневры (например, при входе) на внешнем
ось подвеса крепится к космическому аппарату вдоль или рядом с валком
оси, так что никаких ограничений на маневр крена не существует.
Для обычной миссии единственный раз, когда звезда
fix Перестройка IMU может быть нежелательной между использованием
IMU находится во время маневра по коррекции рандеву LEM в середине пути.Есть несколько возможных процедур для решения этой проблемы.
ситуация, если требуется толкание слишком близко к блокировке кардана
направление, которое может произойти только на 1 1/2%
миссии.
Одно или несколько из следующих
реализовано в результате текущих исследований.
- Две тяги . Желаемая тяга в
направление блокировки можно разбить на две составляющие, лежащие
достаточно далеко от внутренней оси.Рандеву
маневр коррекции середины дистанции около 50 футов в секунду
можно было сделать из двух ожогов 26,5 футов в секунду 20
градусов от внутренней оси, вызывая штраф в 3 фута
в секунду или около 1 фунта топлива. - Смещение внешней оси . Карданный внешний
ось может быть установлена на 33 градуса (например) от
ось тяги, как в командном модуле. Этот
позволит толкать в любом направлении , единственное
ограничение в том, как ориентация толчка
подошел.Это будет обсуждаться позже. - Упорный элемент нечувствителен
направление . В точке коррекции середины курса,
есть направление, в котором толчок не вызовет
эффект на свидание … только эффект на
время, когда это происходит. Это направление лежит около орбитального
плоскости и находится далеко от направления блокировки. Таким образом
Коррекция на 50 футов / сек в направлении блокировки может быть
заменена одной поправкой размером не более 53 футов
в секунду в направлении 20 градусов от подвеса
замок.Если можно допустить небольшую задержку свидания
возможность коррекции менее 50 футов / сек
может привести. Штрафы за топливо, определенные в этих
дела должны учитывать эффект изменения закрытия
скорость и соответствующий маневр торможения. - Планируемое изменение скорости . Если
траектория взлета срезана чуть меньше 160
фут / сек раньше, затем запланированная коррекция в
«легкое» направление 160 футов / сек было бы
требуется добавить (в худшем случае) к 150 фут / сек (3
величина сигмы) коррекция середины курса в случайном
направление.Результат не может быть ближе 20 градусов.
к замку кардана, где будет только 55 футов / сек.
требуется. (Фактически, среднеквадратичная величина общей поправки из-за
к отложенному применению 160 фут / сек и 150
Коррекция 3 сигма фут / сек составляет всего 168 фут / сек. В
«худший случай» 160 + 150 = 310 фут / сек будет
редко встречаются.) - Перенастройка разомкнутого контура . В
точность, необходимая для маневров сближения, такая
эта простая перестройка с помощью компьютера IMU
достаточно точный, не требующий звездных исправлений и
деятельность космонавта.Вероятность нужды
перестройка небольшая (как будет видно), но если она
требуется, то это может быть выполнено автоматически
компьютер со скоростью около 1 градуса в секунду, чтобы
точность лучше 500 частей на миллион.
Любой из двух последних методов оценивается на
Настоящие процедуры являются наиболее вероятными для использования.
Предотвращение любых проблем с блокировкой кардана во время
фактические фазы толчка и входа в Apollo, кажется, не предлагают
трудность.Однако космонавтам следует позаботиться о том, что
может потребоваться в их ручных процедурах изменения отношения
во время любой фазы IMU включен и настроен, чтобы избежать проблем.
Сначала будет объяснено, что такое отношения и углы.
разрешено и что запрещено. Ситуация будет описана
с точки зрения ЛЕМ. Операции в командном модуле различаются
немного из-за смещения внешней оси IMU на 33 градуса от
ось тяги.
Обозначение оси тела LEM должно быть
подчеркнул.Поскольку экипаж сидит позвоночником вдоль
ось тяги в ЛЭМ (в отличие от самолета, куда они смотрят
к оси тяги) возможна путаница, пока
условность твердо закреплена в памяти: в самолете, в
командный модуль, а в LEM ось крена определяется параллельно
к оси тяги. * Таким образом, в стационарной ориентации парения
ось валка ЛЭМ вертикальна по отношению к локальной поверхности
луны. Экипаж смотрит вперед по направлению рыскания.
ось.
* Это определение оси крена LEM было дано
автор APO в MSC.
IMU, вероятно, будет установлен с внешним
Ось кардана параллельна оси крена LEM. Внутренняя ось кардана
будет выровнен и инерционно стабилизирован в направлении
перпендикулярно плоскости траектории приземления или взлета. В
Автомобиль находится на нулевом крене, когда ось рыскания находится в этой плоскости.
шарнирного замка ПРОИСХОДИТ КОГДА LEM THRUST AXIS IS
НАПРАВЛЕННЫЙ В ПРОСТРАНСТВЕННОМ НАПРАВЛЕНИИ ИНЕРЦИАЛЬНО СТАБИЛИЗИРОВАННОГО
ВНУТРЕННЯЯ ОСЬ ПОДВОДА, ВЫРАВНИВАЕМАЯ ГОРИЗОНТАЛЬНО И ПЕРПЕНДИКУЛЯРНО
НА ПЛОСКОСТЬ ПОСАДКИ ИЛИ ВЗЛЕТ ТРАЕКТОРИИ.
Блокировку кардана можно избежать с большим запасом, тогда,
отношениями, ограниченными следующим образом:
СВОБОДА ПОДВОДА ИДУ В РАЗРЕШЕНИЯХ ЛЕМ:
а. ЛЮБОЙ УГОЛ РОЛИКА
г. ЛЮБОЙ УГОЛ НА ZERO ROLL
г. ЛЮБОЙ УГОЛ РЫСКАНИЯ НА КРУГЕ 90 ИЛИ 270 ФУТОВ
Собственно, раз уж видели в предыдущей
секция, к которой можно подойти к замку кардана в пределах 10 градусов
без опасности потери отношения критерий становится:
IMU ТОЧНОЕ ОТНОШЕНИЕ БУДЕТ СОБЛЮДАТЬСЯ В
УПОРНАЯ ОСЬ НОЖА НЕ УКАЗАНА В пределах 10 ГРАДУСОВ ПРОСТРАНСТВА.
НАПРАВЛЕНИЕ ИНЕРЦИОННО СТАБИЛИЗИРОВАННОЙ ВНУТРЕННЕЙ ОСИ ПОДВОДА, КОТОРАЯ
ВЫРАВНИВАЕТСЯ ПО ГОРИЗОНТАЛИ И ПЕРПЕНДИКУЛЯРНО ПЛОСКОСТИ ПОСАДКИ
ИЛИ ТРАЕКТОРИЯ ВЗЛЕТА.
Это исключает только противоположную пару очень
небольшие участки по горизонтали с каждой стороны пути, на котором
ось тяги не должна быть направлена. Это приводит к еще одному
общее выражение правила:
IMU PRECISION ATTITUDE ПОДДЕРЖИВАЕТСЯ ДЛЯ:
а. ЛЮБОЙ ROLL УГОЛ О ТЯГЕ AXIS
г. 98,5% ВСЕХ ВОЗМОЖНЫХ НАПРАВЛЕНИЙ
УПОРНАЯ ОСЬ, ДОСТИЖЕННАЯ В ЛЮБОМ СОЧЕТАНИИ
ПОВОРОТА И РЫСКАНИЯ.
Ручные или автоматические операции также имеют
другие четкие правила и предупреждения для предотвращения попадания в
1,5% опасных зон. Индикатор отношения руководителя полета —
«восьмерка» будет построена с карданным подвесом.
совместим с IMU. Датчики угла подвеса IMU
будет управлять положением мяча, когда IMU включен и выровнен. Два
зоны предупреждения, отмеченные на каждом полюсе мяча по центру
шариковые подшипники внутренней оси карданного подвеса дают именно правильную опасность
Требуется информация о местности пилоту:
КОСМИЧЕСКОЕ ОТНОШЕНИЕ НЕ ДОЛЖНО БЫТЬ РАЗРЕШЕНО
ПРОЙДИТЕ В ДВЕ ПРЕДУПРЕЖДАЮЩИЕ ЗОНЫ НА КАЖДОМ ПОЛЮСЕ
ПОЛЕТНОЕ ОТНОШЕНИЕ ШАР.
Опасная ситуация с ИДУ может быть
выражается просто через средний угол подвеса. Средний
углы подвеса в пределах 80 градусов находятся в безопасной зоне;
вне этого диапазона — опасность. Система предназначена для закрытия
переключайте контакт при приближении к любой опасной зоне. Этот контакт
информирует компьютер об этом факте и включает сигнальные лампы для
использование космонавтов:
КОСМИЧЕСКОЕ СОЗДАНИЕ ПРИБЛИЖАЕТСЯ К ПОДВОДУ
ОПАСНАЯ ЗОНА БЛОКИРОВКИ ПРИ ГОРЕНИИ ПРЕДУПРЕЖДАЮЩЕЙ СВЕТИЛЬНИКА «ЗАМОК КАДРА»
ПРОДОЛЖАЕТСЯ.
Компьютер блокирует
командование любого среднего угла CDU больше, чем безопасный
выше простого критерия. Это дает прямое логическое правило для
компьютер для безопасного управления изменениями положения космического корабля.
Если отношение ИДУ потеряно по какой-либо причине
включая приближение слишком близко к блокировке кардана,
система автоматического контроля сигналов ошибок гироскопа указывает
факт.
ПОТЕРЯ ОТНОШЕНИЯ ИДУ ИЗ-ЗА ЛЮБОЙ ПРИЧИНЫ
НЕМЕДЛЕННО УКАЗЫВАЕТСЯ ПРЕДУПРЕЖДАЮЩИМ СВЕТОМ «ОШИБКА IMU».
4. Аварийные и аварийные ситуации
Для большинства случаев прерывания миссии ИДУ
Ситуация с блокировкой кардана больше не ограничивает успешное прерывание
чем на обычных фазах. Две фазы миссии были
выявлено, однако, что может потребовать критической зависимости от
ИДУ продемонстрировало свое намерение успешно справиться с
чрезвычайная ситуация. Первый из них — прерывание на большой высоте до
сброс аварийной вышки.Если командный модуль падает
во время этой операции есть вероятность, что внешняя ось
может пройти через критические области возле замка кардана, вызывая
потеря информации об отношении ИДУ. Если правильное отношение входа
не предполагалось достаточно рано, реакционные струи могут быть не в состоянии
преодолеть и исправить неправильное, но устойчивое отношение
«точка» вперед к правильной ориентации входа.
С закрытыми окнами и ограничениями
резервная система отношения, зависимость от информации об отношении ИДУ
было бы необходимо.Вероятность превышения стресса экипажа
ограничения в описанной ситуации являются продуктом
вероятность того, что прерывание будет инициировано на критической высоте,
вероятность того, что прерывание вызовет неконтролируемое падение,
вероятность того, что падение заставит ИДУ пройти через
критические зоны блокировки кардана и вероятность того, что пилот
не может определить направление сопротивления достаточно рано, чтобы исправить
отношение или вероятность того, что командный модуль войдет в резкое
конец первым.* В этой памятке не делается попытка оценить эти
вероятности.
* На момент написания этой команды
В модуле предусмотрены аэродинамические поверхности для предотвращения неправильного конца
вход. Приведенное выше обсуждение представляет только академический интерес.
Прежде чем обсуждать вторую критическую ситуацию
идентифицированы, было бы хорошо указать, что могло бы показаться
лучшее действие в ситуации непреднамеренного падения на
в любое время в миссии. Даже если IMU предоставит точные данные
мяч, управляемый пилотом,
Лучше пользуйтесь показаниями скорости тела.
После того, как скорость доведена до достаточно низкого
затем можно попытаться добиться желаемого отношения. В зависимости от
фаза миссии и другие факторы, пилот может использовать любой из
несколько указателей отношения. Если бы ИДУ не потерял ориентацию
— предполагая, что он был включен и выровнен в первую очередь — пилот
узнал бы об этом факте с помощью автоматической системы обнаружения ошибок и
горит индикатор ошибки. Любая потеря отношения ИДУ обнаруживается и
факт отображается на соответствующем свете, как упоминалось ранее.
Предполагая, что информация об отношении IMU потеряна,
наилучшие данные об ориентации будут получены визуально через
окна. Рядом с землей можно использовать землю; возле луны
можно было бы использовать луну. С этой помощью пилот может ориентировать
космический корабль настолько точно, насколько он может судить о правильной ориентации.
Как только это будет сделано, он сможет управлять «грубым выравниванием».
управление режимами осуществляется с клавиатуры АРУ пилота. Это бы
быстро повернул ИДУ в положение космического корабля, описанное
ХДС.Компьютер будет запрограммирован на установку CDU на ноль как
действие после обнаружения аварийной ситуации. Освобождение управления
позволяет ИДУ указывать отклонения от этого отношения. Этот
представляет собой очень быструю процедуру перенастройки.
ОЧЕНЬ БЫСТРОЕ ВЫРАВНИВАНИЕ IMU МОЖЕТ БЫТЬ ДОСТУПНО В
АВАРИЙНЫЙ РЕЖИМ «Грубая настройка».
МГНОВЕННО ПРИГЛАСИТЬ ИДУ К СУЩЕСТВУЮЩЕМУ ОТНОШЕНИЮ КОСМИЧЕСКОГО КОРАБЛЯ.
Вторая фаза миссии, которая была
определены как критические в отношении блокировки подвеса IMU
ограничения есть в LEM во время посадки на Луну.Тяжелый
отказ кардана посадочного двигателя в направлении рыскания потребует
положительное действие пилота почти сразу, чтобы избежать блокировки подвеса.
При вертикальном наведении случайное падение с
вертикальный имеет 11% шанс пройти в пределах 10 градусов от
зафиксируйте ориентацию, если не остановили до 90 градусов. Если
информация об ориентации была потеряна в результате такого маневра, транспортное средство
будет толкать почти горизонтально и, вероятно, вниз
если двигатель не был немедленно остановлен, что, конечно,
будет правильным первым действием в чрезвычайной ситуации.Мнение
Луна через окна LEM была бы лучшим источником
ориентация, чтобы попытаться поднять автомобиль перед прерыванием
взлетный двигатель. Информация об азимуте может быть оценена
хорошая степень по направлению, в котором проходят лунные объекты.
После получения правильного отношения ИДУ может
быть перестроенным к существующей ориентации транспортного средства с помощью
Упомянутый выше режим «грубой юстировки IMU». В
текущий посадочный двигатель LEM теперь имеет ограниченное использование кардана двигателя
только для корректировки направления оси тяги; рулевое управление осуществляется
отдельные форсунки.Казалось бы, скорость реакции
необходимость в капитальном ремонте двигателя теперь значительно снижена.
5. Учет четырех степеней
Свобода IMU
Проблемы с блокировкой карданного подвеса могут быть
избежать за счет добавления четвертого стабилизатора к IMU. Это будет
здесь можно назвать дублирующим подвесом, поскольку он обеспечивает больше
степени свободы, чем теоретически необходимо. Это избыточное
Подвес будет рассматриваться в этом документе как установленный вне
нормальный внешний кардан.В этом описании используется следующий порядок:
внутренний, средний, внешний и дублирующий; см. рисунок 4.
Наиболее вероятная операция будет использовать три внутренних кардана для
довести до нуля сигналы ошибки стабилизирующего гироскопа, в то время как четвертый
приводится в движение так, чтобы средний стабилизатор находился около нуля и вдали от
ориентация карданного замка. Это можно сделать, создав
избыточная команда скорости карданного подвеса выражениями, аналогичными
A (резервный) = k sin A (средний) /
cos A (внешний)
так что отрицательный отзыв на средний угол
происходит движение среднего угла к нулю.* Это должно быть возможно
чтобы внутренние три кардана имели одинаковые динамические характеристики
как более простая система с тремя степенями свободы. Любое базовое движение
однако в Apollo избегают сопряжения, как описано в первом
секции, избыточные движения кардана будут выглядеть как
нарушения на средних или внутренних сервоприводах, требующие специальных
внимание в ответах петли. Резервный стабилизатор должен быть
ускоряется, если он должен выполнять свою работу даже при среднем угле поворота кардана
близка к нулю, на самом деле такая ситуация, как блокировка кардана, возникает для
внешние углы около 90 градусов, как видно из приведенного выше
уравнение.Внешний угол подвеса близок к 90 градусов, дублирующий
Подвес должен приводиться в движение на очень высокой скорости, чтобы середина оставалась на нуле.
На практике это не представляет особых трудностей, пока автомобиль
показатели тела находятся в определенных пределах.
* Метод изоляции с четырьмя карданными подвесами без блокировки
Платформа из вращающегося транспортного средства, Ричард К. Хатчинсон,
MIT / IL Report R-285, апрель 1961 г., глава 8.
С карданной системой с четырьмя степенями свободы
нет ограничений по отношению к транспортному средству, хотя ограничения скорости
все еще существуют.
Для работы с четвертым стабилизатором требуется
дополнительный сервопривод, отличный от трех других сервоприводов, и дополнительные данные
преобразователи или аналогичные по средней и внешней осям для
определить избыточные команды стабилизатора. Расход в Аполлоне
Добавление четвертого кардана зависит от ряда факторов. В
Требуемая точность центровки IMU в Apollo является критически важной конструкцией.
коэффициент для достижения необходимой системы наведения
спектакль для лунной миссии.Это означает данные о подвесе
преобразователи с пиковой погрешностью не хуже 20 угловых секунд
необходимы для использования оптической системы для звездной системы
Ссылки. Добавление четвертого кардана усугубляет проблему
в структуре IMU, в компьютерном интерфейсе и программе
бортовой компьютер должен обеспечивать выравнивание.
В настоящее время преобразователи данных на 20 угловых секунд
доминируют и определяют размер ИДУ Аполлона. Без этих
большие блоки IMU будут на несколько дюймов меньше в диаметре.Четвертый стабилизатор, использующий те же проверенные преобразователи, повысил бы
Вес конструкции IMU на 15 фунтов и увеличение объема на 725
кубические дюймы. *
* Расчеты Дж. Б. Ньюджента; не учитывая
добавлены преобразователи внутреннего элемента для управления резервным стабилизатором.
Основные номера засекречены.
Конечно меньшая 4 степени свободы IMU
можно было бы спроектировать, если бы привязка к звезде в полете была
не требуется или если небольшой датчик точных данных
имеется в наличии.Расширенная система наведения Polaris с четырьмя степенями свободы
конфигурации свободы оценивается в 2/3
Аполлон с тремя степенями свободы и имел бы эквивалент
производительность за исключением точности преобразователей данных оси.
Достижения в области малых преобразователей точных данных изучаются
с целью прямого цифрового кодирования углов подвеса. Этот
может привести к некоторому упрощению CDU или их
замена на быстрый дополнительный рулевой интерфейс
компьютер.Настоящий компьютер не настроен на закрытие
удовлетворительно петля ориентации космического корабля непосредственно.
Дополнительная сложность приведет к созданию
полное использование системы с четырьмя степенями свободы с использованием тока
оборудование. Дополнительный CDU (3 фунта плюс электроника) будет
требуется для гибкой работы с компьютером. Дополнительные
подвесу потребуется более длинная цепочка разрешения для создания
ошибка отношения автопилота. Эту цепочку уже сложно
достичь требований, предъявляемых существующим автопилотом
интерфейс.Кроме того, компьютер должен взять на себя бремя
обеспечение разрешения в реальном времени, необходимое для преобразования рулевого управления
углы в координатах акселерометра в соответствующие команды CDU.
Добавление четвертого кардана, прочее
при равенстве обязательно увеличивает потребление мощности на основной
батареи на топливных элементах, помимо необходимости в дополнительном комплекте сервопривода
электроника. Передача тепла от гироскопов внутри к радиатору
на корпусе усложняется дополнительным
четвертый кардан.Резервная ось должна иметь контактные кольца.
чтобы быть полезным, который должен передавать все сигналы на внешнем
осевые кольца плюс дополнительные из-за дублирующей оси
приборы.
Одна неприятная трудность — это создание
три степени свободы команды положения мяча от дублирующего
четыре степени свободы ИДУ. Это будет решено
разработка совместимого шара с четырьмя степенями свободы, но
штраф за размер панели был бы серьезным.Электрический
преобразование из четырех степеней свободы в необходимые три
связан с эквивалентом карданного замка, который
резервный кардан был добавлен для предотвращения.