
Шаговые двигатели: описание, примеры, обзоры, характеристики
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.
Это же относится и к гибридным двигателям.
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.
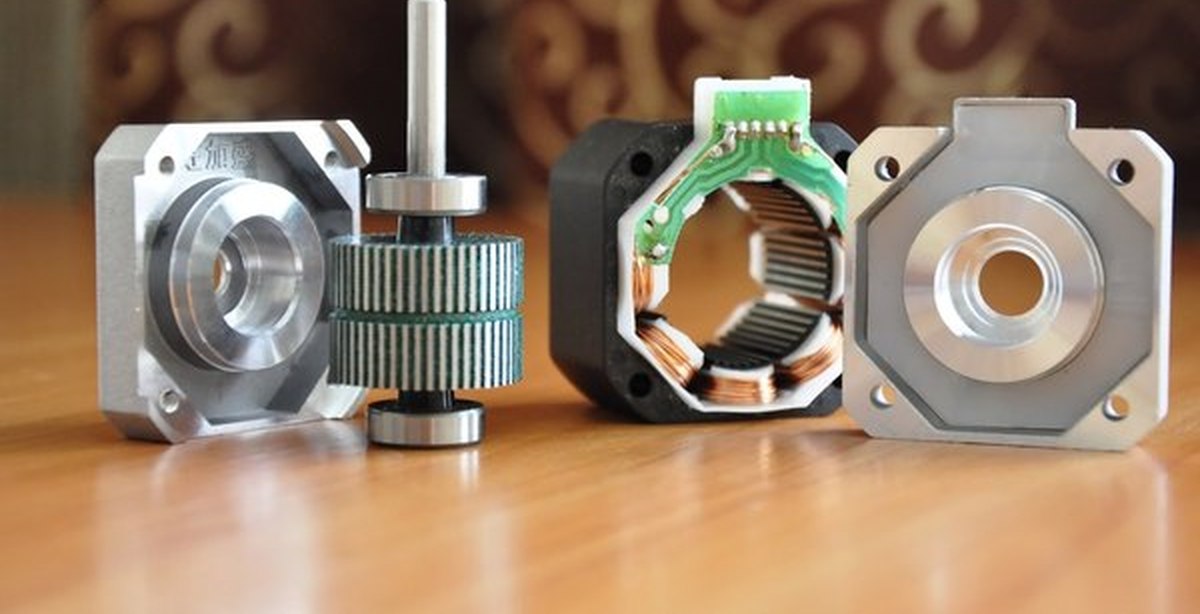
Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.
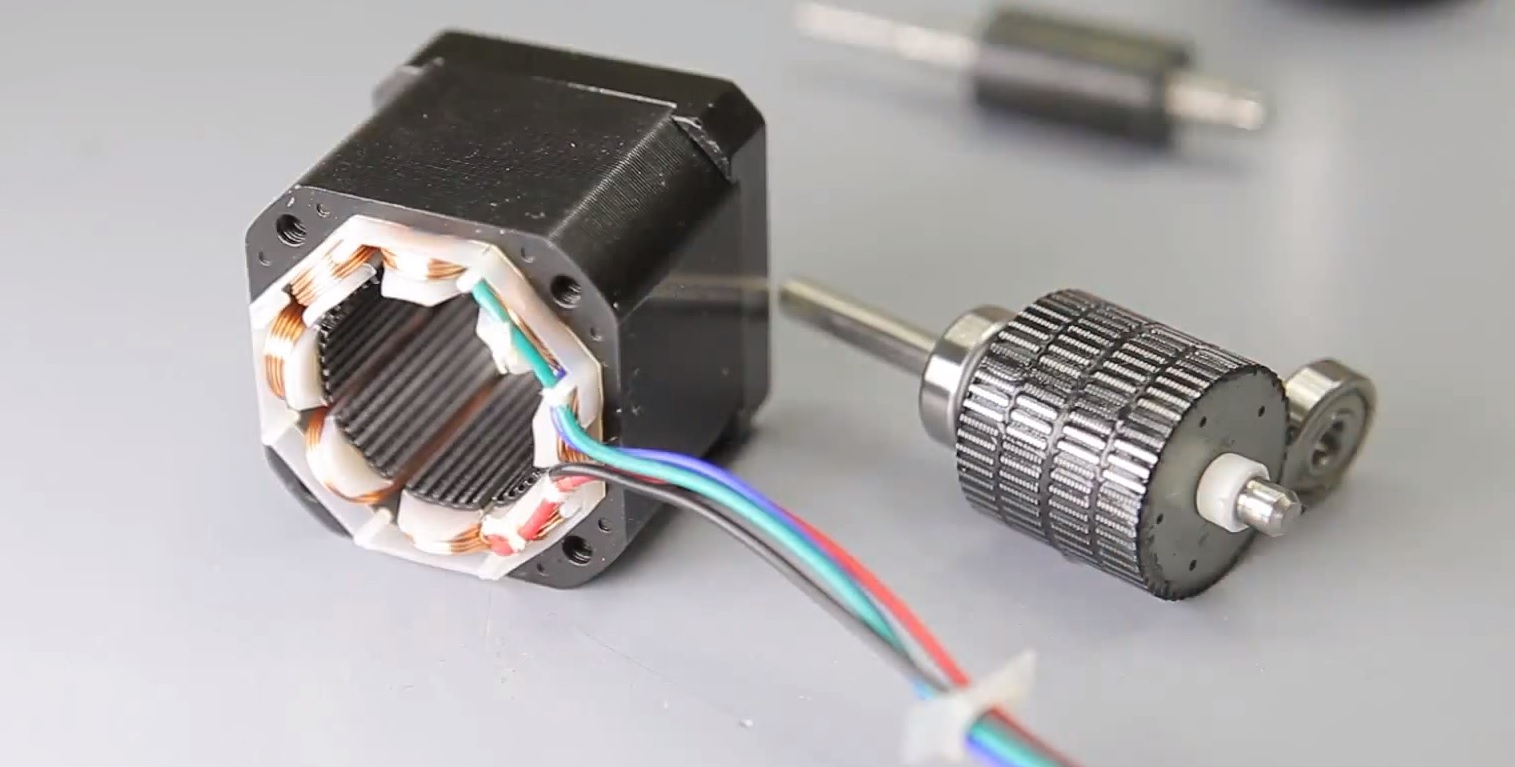
Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит.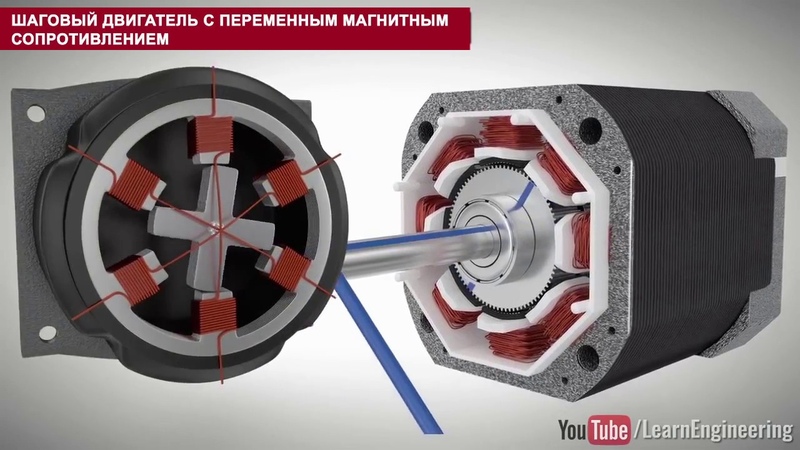 Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
Тут всего два основных вида – биполярный и униполярный
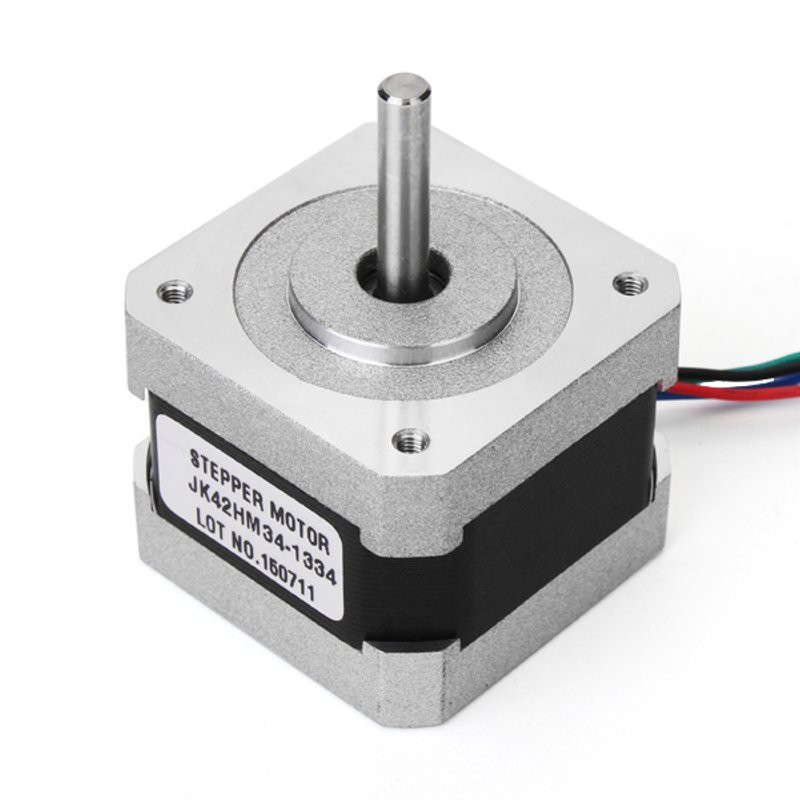
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.
Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя.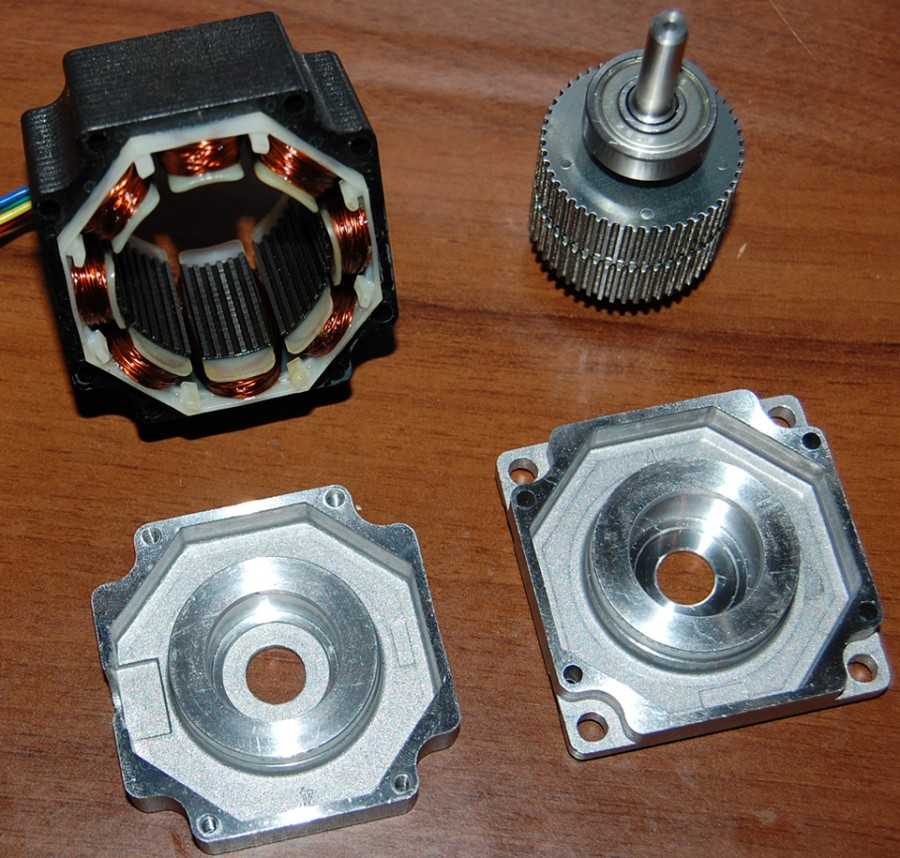 В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем
Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
-
полношаговое -
полушаговое -
микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе.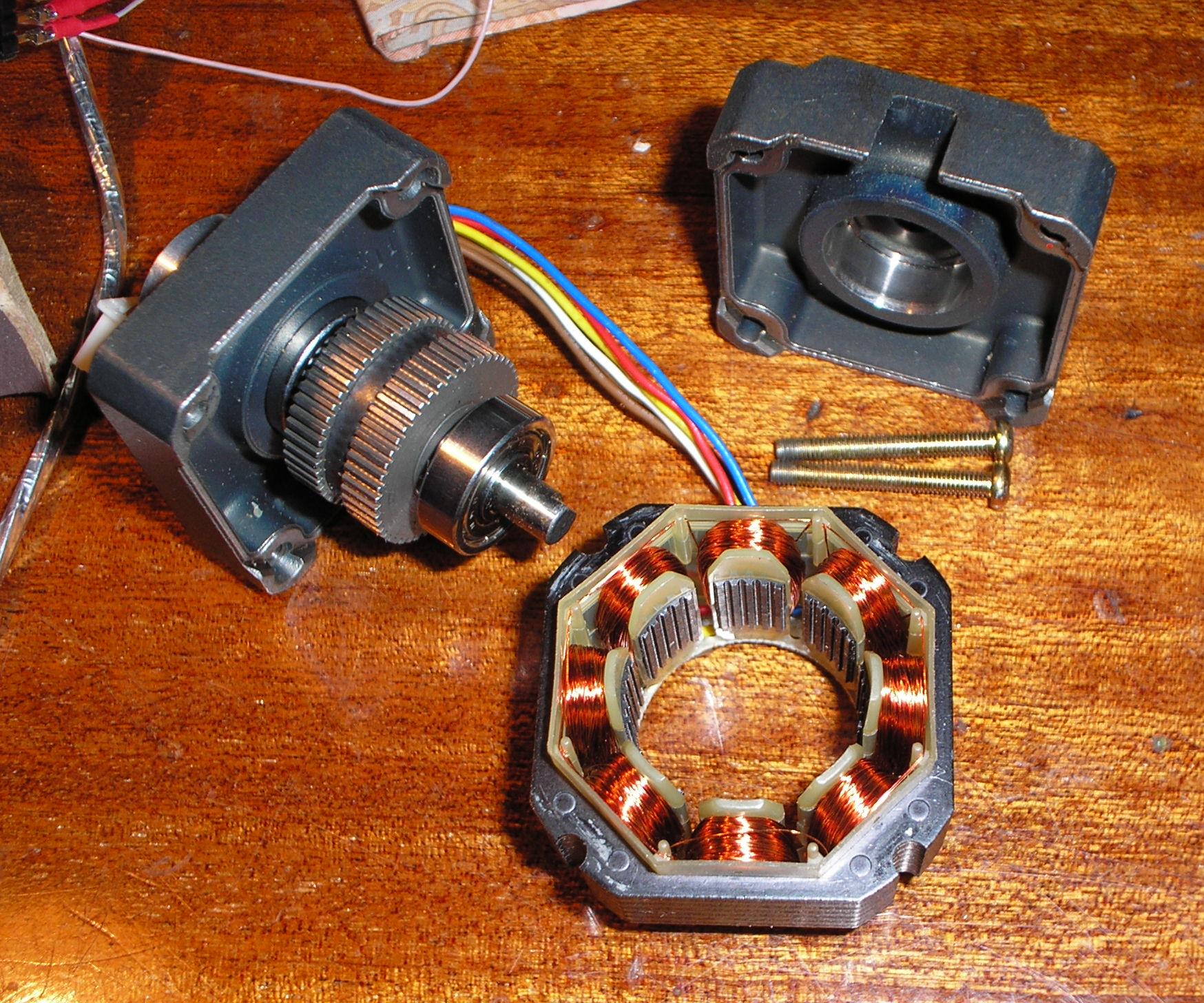 Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
Обычный шаговый двигатель
Тут нет никаких изысков – корпус, вал, в общем стандарт. Широко распространен в разном оборудовании, начиная от фрезеров и 3д принтеров, заканчивая приводом заслонки или мешалки.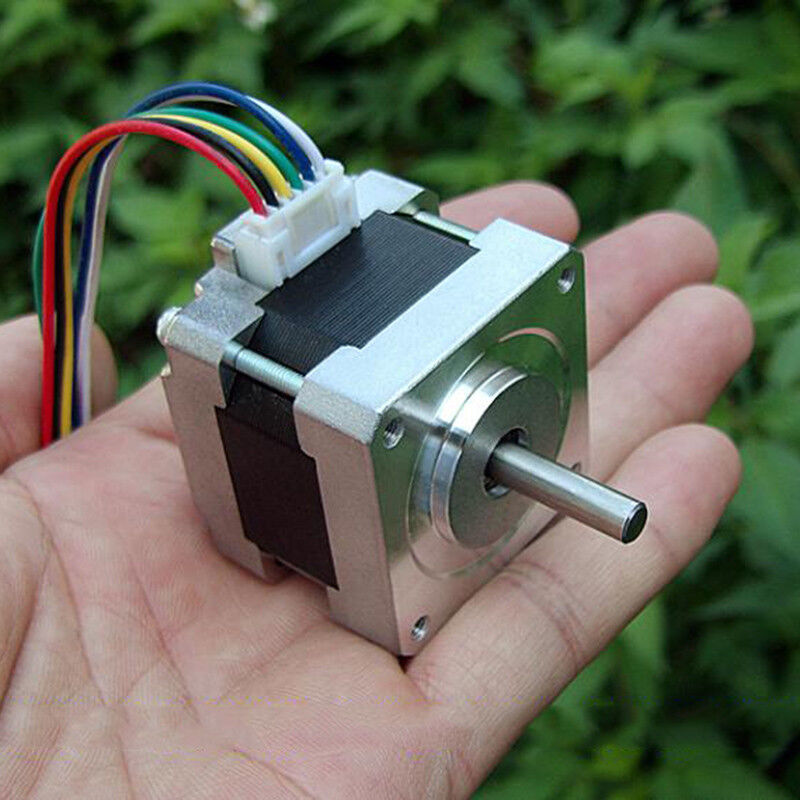
Двигатель с полым валом
Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой
Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом
В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки.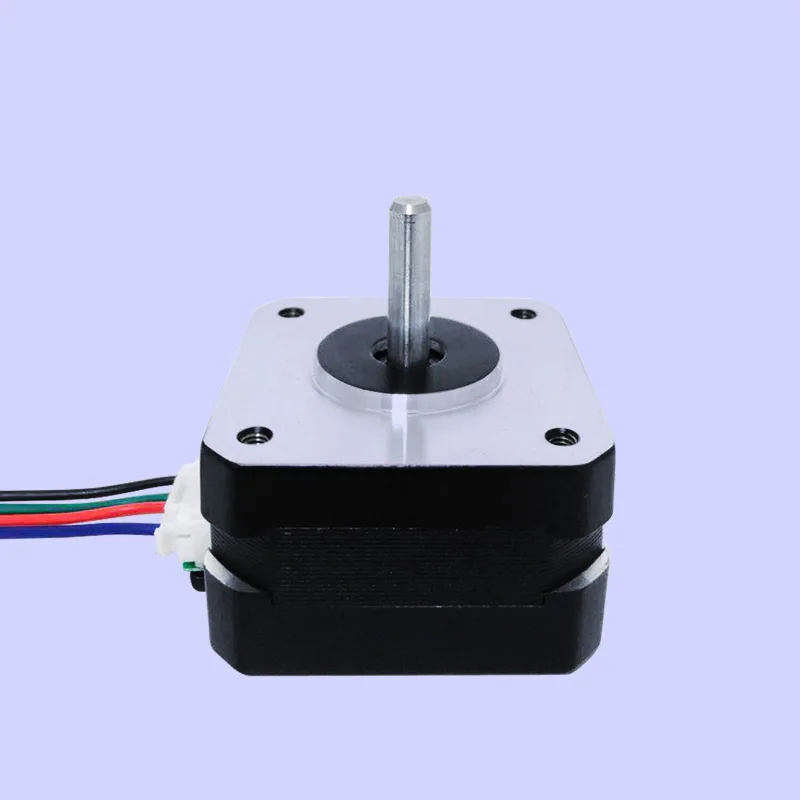 На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
Двигатель с винтом вместо вала
Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом
Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором
Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером
Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи.
 Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул. - двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
 Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.

- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
 На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.

По большому счету, выбор двигателя сводится к выбору нескольких вещей:
- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Шаговые двигатели: что это такое, где применяются, устройство и принцип работы, типы и их конструктивные особенности, драйвер ШД, подключение и управление
Шаговый двигатель (ШД) — бесщеточный механизм с несколькими обмотками и последовательной подачей напряжения на каждую из них. Первые экземпляры электрических моторов такого типа появились еще в 1830-х годах, и почти за 200 лет устройство претерпело значительных изменений.
Первые экземпляры электрических моторов такого типа появились еще в 1830-х годах, и почти за 200 лет устройство претерпело значительных изменений.
Ниже рассмотрим, что это за агрегат, какие бывают виды и особенности конструкции, на каком принципе работают, и где применяются. Отдельно разберем плюсы и минусы, тонкости подключения и управления, а также другие вопросы, касающиеся разновидности мотора.
Что такое шаговый двигатель
Шаговый двигатель — электромотор, где импульсное питание током приводит к перемещению роторной части на заданный угол. Относится к классу бесколлеркторных электромоторов постоянного тока.
После его запуска создается наибольший момент при минимальной скорости, а сам двигатель показывает отличные характеристики даже в состоянии покоя.
Управление осуществляется посредством дискретных импульсов, формируемых на драйвере мотора.
Первые шаговые двигатели имели вид электромагнита, вращающего в момент включения храповое колесо. Каждое включение приводило к перемещению на одну позицию.
Каждое включение приводило к перемещению на одну позицию.
За время эксплуатации моторы были существенно оптимизированы с позиции конструктивных и функциональных параметров.
Сфера применения
Шаговые двигатели получили широкое применение и устанавливаются во многих механизмах.
Примеры:
- Периферийные устройства вычислительных машин.
- Станки с числовым программным управлением (ЧПУ): XY-столы, фрезерные станки, чертежные автоматы.
- Устройства компьютерной памяти.
- Оборудование для чтения оптических дисков.
- Перфоратор и считыватель ленты и т. д.
Фрезерный станок с ЧПУ
Активное применение в машиностроении получили двухфазные шаговые электродвигатели гибридного типа. Также они используются в приводах разных машин и механизмов, которые работают в режиме «старт-стоп».
Типы и конструктивные особенности
Сегодня применяется несколько видов ШД, отличающихся по конструкции, типу обмоток, особенностям управления и иным параметрам. Рассмотрим каждую классификацию более подробно.
Рассмотрим каждую классификацию более подробно.
По конструкции ротора
Многие характеристики двигателя, касающиеся скорости вращения и режима работы, зависят от ротора.
С этой позиции выделяется три вида устройства.
Реактивный (синхронный). Особенность — отсутствие роторного магнита. Конструктивно изготавливается из специальных сплавов, позволяющих снизить индуктивные потери. Устройство имеет вид шестеренки с зубцами, а на полюсах статора подается напряжение со второй пары. Как результат, создается магнитная сила для перемещения ротора. По принципу действия реактивный шаговый агрегат имеет много общего с синхронным мотором, где поля ротора и статора вращаются в одном направлении.
- Двигатель с магнитами. В отличие от прошлого устройства подвижный элемент комплектуется постоянным магнитом с двумя и более полюсами. Ротор крутится, благодаря притягиванию и отталкиванию полюсов с помощью электрического поля в момент подачи разницы потенциалов на определенные обмотки.
- Смешанные. В гибридных устройствах совмещаются лучшие качества магнитных и реактивных моторов. В отличие от прошлых моделей угол и шаг здесь меньше. Конструктивно ротор оборудован постоянным магнитом, имеющим цилиндрическую форму. Внешне он имеет вид двух полюсов с круглым сечением, на поверхности которых находятся роторные зубцы. Такая особенность гарантирует хороший момент вращения и удерживания. Главные плюсы — максимальная плавность, точность и скорость перемещения.

По типу обмоток
Плавность функционирования шагового двигателя находится в прямой зависимости от числа обмоток, поэтому на этот фактор важно обращать особое внимание.
Многие ошибочно считают, что количество обмоток зависит от числа фаз. Это не так, ведь даже 2-фазный мотор может иметь четыре и более обмотки.
Шаговые двигатели бывают:
- Униполярными. Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов.
- Биполярный. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление. Достижение такого эффекта доступно с помощью Н-моста. Если сравнивать с униполярным видом, биполярный тип гарантирует тот же момент, но при меньших размерах.
 Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов.
Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов.По типу управления
Для расширения функционала и удобства применения предусмотрена система управления.
Она бывает следующих типов.
Волновая: возбуждение только одной обмотки. Недостатком является минимально доступный момент.
Полношаговая: одновременное включение обмоток.
Полушаговая: делание геометрии шагового мотора пополам. Обеспечивается увеличенное разрешение при позиционировании вала агрегата.
По типу
При выборе шаговых двигателей нужно понимать, что они бывают нескольких типов.
Кратко рассмотрим их особенности:
- Биполярные двигатели — двухфазные с угловым перемещением в 0,9 или 1,8 градуса Цельсия. Разработчики гарантируют высокую точность шага без нагрузки величиной до 5%.
- С энкодером (часто называются гибридными серводвигателями). Особенность состоит в наличии инкрементального энкодера. Моторы объединяют лучшие качества серво- и шаговых электрических моторов, а цена таких устройств меньше в сравнении с сервосистемой. Применяются в комплексе с контроллером.
- Линейные (актуаторы). Принцип действия построен на преобразовании вращательного движения в линейное. Иными словами, в них сочетается винтовая передача и ШД, объединенные в общем блоке.
- Шаговые двигатели с редуктором. Применяются в ситуации, когда необходимо получить максимальное усилие на валу электрического привода с минимальной скоростью вращения. В роли редуктора используется планетарный тип, оборудованный прямозубыми шестеренками с небольшим люфтом передачи.

На рынке представлен большой выбор устройств, имеющих индивидуальные характеристики и подходящих для определенных сфер деятельности. Эти моменты необходимо учитывать при выборе модели.
Принцип работы
В зависимости от вида агрегата его конструктивные особенности могут отличаться, но общий принцип действия почти неизменный. Так, на статоре предусмотрены четыре обмотки, расположенные под 90-градусным углом.
Как только на первую обмотку подается напряжение, ротор перемещается на указанный выше угол. При поступлении напряжения на вторую, третью и четвертую обмотку вал продолжает вращаться до прохождения полного круга. Далее процесс повторяется сначала.
При желании изменить очередность вращения требуется подавать импульсы в обратном направлении. Для удобства пользователи могут управлять ШД и менять его характеристики с учетом особенностей использования.
Преимущества и недостатки
Перед применением шагового двигателя необходимо изучить его плюсы и минусы.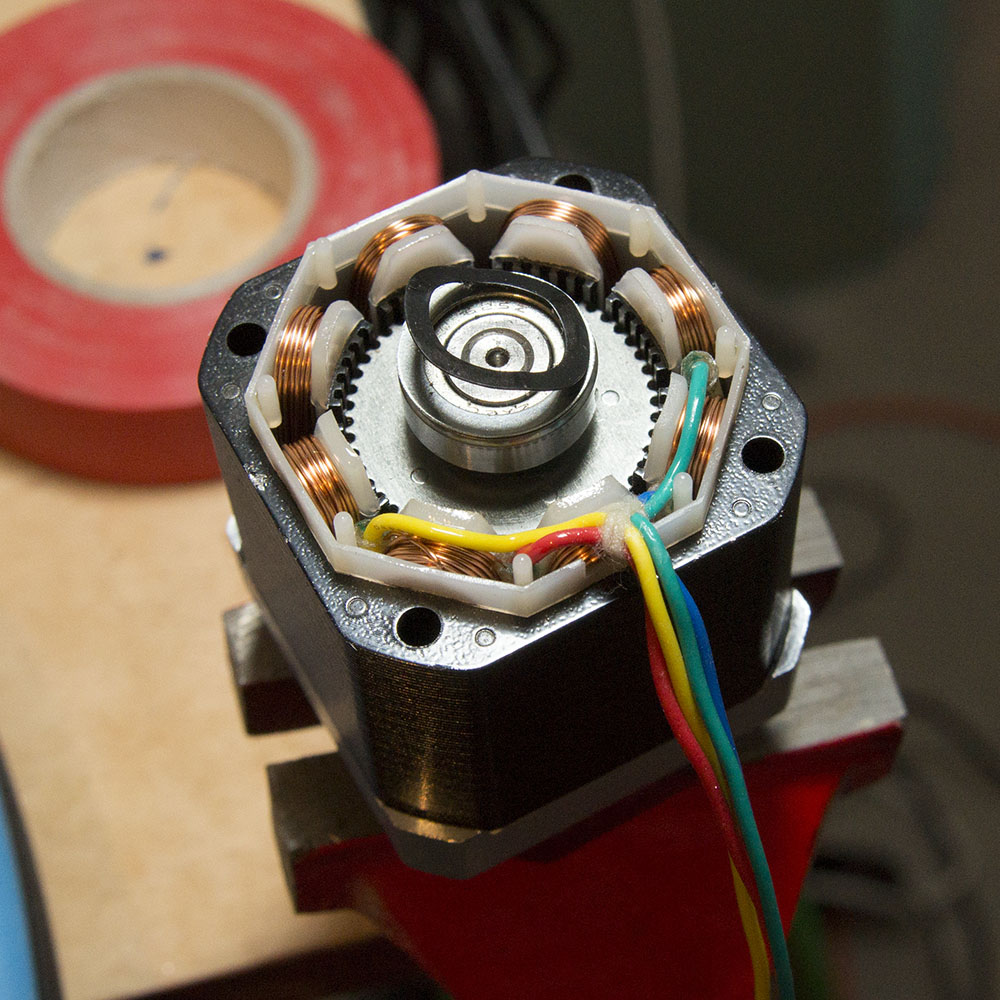 По ним проще судить об актуальности применения оборудования для решения задач разной сложности.
По ним проще судить об актуальности применения оборудования для решения задач разной сложности.
Плюсы:
- Точность. При подаче напряжения на определенные обмотки ротор поворачивается на строго определенный угол.
- Продолжительный срок службы. Если следить за оборудование, проводить периодические проверки и восстановительные процедуры, шаговый двигатель способен прослужить не меньше станка.
- Часто применяется в качестве более дешевой альтернативы сервопривода. Его часто применяют для автоматизации разного рода узлов.
- Стабильность. ШД работает при разных нагрузках и не боится колебания этого параметра.
- Легкость в применении. Управление шаговым двигателем не требует специальных знаний. Разобраться в принципе действия и правилах использования может даже новичок.
- Отличные характеристики: поддержка максимального момента вращения (даже при низкой скорости), четкость фиксации после остановки.
- Простота ремонта. Имеет простую конструкцию, поэтому с обслуживанием и восстановлением не возникает трудностей.

Минусы:
- Низкий момент. ШД не могут похвастаться достаточным моментом при повышении скорости вращения. Единственный выход — улучшение динамических параметров с помощью специальных ШИМ-драйверов.
- Вибрации. Из-за дискретности шага возникают вибрации, которые неизбежно приводят к уменьшению момента вращения и появлению резонансов в системе.
- Риск нарушения позиционирования. Изменение этого параметра возможно при повышении нагрузки выше допустимого параметра.
- Небольшая эффективность. Шаговый двигатель использует много энергии даже при минимальной нагрузке.
- Трудности с набором скорости. Агрегат с трудом набирает обороты после мгновенной перегрузки.
- Риск «проскальзывания» ротора. Это известная проблема, проявляющаяся в случае повышения нагрузки выше допустимого значения. Для ее решения можно установить датчик или увеличить мощность мотора.
Это не исчерпывающий список слабых и сильных характеристик шагового механизма, но достаточный для принятия решения.
Основные характеристики
При выборе шагового двигателя необходимо смотреть на его параметры.
Выделим основные моменты:
- Количество полных шагов. От этого показателя зависит плавность и точность хода, а также разрешающая способность. В современных моделях число полных шагов должно быть в пределах 200-400.
- Сопротивление обмотки. Свидетельствует о напряжении, которое может выдать агрегат.
- Угол дискретного перемещения. Считается путем деления 360 градусов на число отдельных перемещений за оборот. Оптимальный показатель от 0,9 до 1,8 градуса.
- Индуктивность фазы. Определяет скорость увеличения тока, что актуально при ускоренном вращении вала.
- Пробивное напряжение. Максимальный параметр, при котором нарушается целостность изоляционного слоя и определяется безопасность применения.
- Сопротивление изоляции. Измеряется между каждой из обмоток и кожухом.
- Номинальный ток. Наибольший параметр, при котором возможна безопасная эксплуатация агрегата.
- Допустимое напряжение («постоянка»). Измерение осуществляется на витках. Иногда этот параметр не указывается, но в таком случае его можно посчитать по закону Ома.

Отдельное внимание важно уделить еще одному параметру — моменту. Он бывает нескольких видов:
- удерживающий: актуален в случае полной остановки и питания током двух фаз;
- крутящий: зависит от частоты вращения, указывается максимальный показатель для агрегата;
- стопорный: необходим для проворачивания вала при отсутствии питания;
- инерционный: чем ниже этот показатель, тем быстрее разгоняется двигатель.
Комплексный анализ характеристик позволяет с большей точностью подобрать устройство под решение конкретных задач.
Подключение шагового двигателя
Для подачи потенциала на обмотки ШД необходим механизм, способный выдать один или группу импульсов в конкретной последовательности. В роли таких элементов выступают полупроводниковые устройства и драйвера на базе микропроцессоров.
В них предусмотрена группа выходных клемм, каждая из которых формирует режим функционирования и подачи напряжения.
С учетом схемы подключения используются те или иные выводы устройства. Как результат, удается подобрать конкретную скорость вращения, шаг или микрошаг для перемещения в плоскости.
Всего выделяется шесть основных схем соединения:
- биполярный;
- биполярный с отводом из центральной части обмотки;
- униполярный с четырьмя фазами и подключением пары обмоток;
- четырехфазный униполярный с параллельным подключением;
- четырехфазный униполярный с последовательным соединением.
Если питание шагового двигателя осуществляется от одинакового драйвера, в отношении упомянутых выше схем можно выделять ряд особенностей:
- Отводы всегда подходят к соответствующим клеммам. При последовательном объединении обмоток повышается индуктивность обмоток и снижается ток.
- Пользователь получает паспортные параметры касательно параметров. При параллельном подключении повышается ток и уменьшается индуктивность. Если подключить обмотку по одной фазе, уменьшается момент на низких оборотах, и снижается величина тока.
- Сохраняются динамические и электрические параметры (с учетом данных в паспорте).
- Повышенный момент и использование для получения больших частот.
- Увеличение момента (используется для небольших частот вращения).
 При параллельном подключении повышается ток и уменьшается индуктивность. Если подключить обмотку по одной фазе, уменьшается момент на низких оборотах, и снижается величина тока.
При параллельном подключении повышается ток и уменьшается индуктивность. Если подключить обмотку по одной фазе, уменьшается момент на низких оборотах, и снижается величина тока.Принципиальные схемы подключения показаны ниже.
Для беспроблемной эксплуатации ШД важно помнить о тонкостях подачи номинального напряжения, скорости момента вращения и снижения линейного напряжения.
Отдельного внимания заслуживает подключение шагового двигателя к Ардуино. В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno.
Питающее напряжение равно 5 В. Дополнительно можно использовать еще один источник питания во избежание перегрева платы.
Кстати, как сделать умный дом на Arduino читайте тут https://elektrikexpert.ru/arduino.html.
Управление шаговым двигателем
Как уже отмечалось, выделяется несколько способов управления шаговым агрегатом. Каждый из вариантов имеет ряд особенностей в вопросе подачи сигналов на имеющиеся полюса.
К главным методам управления относится:
- Волновой. Особенность состоит в подаче возбуждения к одной обмотке. Именно к ней и подтягиваются роторные полюса. При этом ШД не способен выдержать большую нагрузку, ведь выдает лишь часть момента.
- Полношаговый. Суть такого управления в одновременном возбуждении двух фаз, что гарантирует наибольший момент при параллельной схеме подключения. Если соединить обмотки последовательно, будет создаваться максимальный ток и напряжение.
- Полушаговый. Комбинация двух рассмотренных выше режимов. При реализации такой схемы в шаговом моторе происходит поочередная подача напряжения. Сначала оно направляется в одну катушку, а потом сразу в обе. Как результат, гарантируется лучшая фиксация на наибольших скоростях и максимальным числом шагов.
Чтобы преодолеть инерцию и достичь более мягкого управления, применяется микрошаговая структура. Особенность — задание синусоиды с помощью многочисленной подачи импульсов.
Как результат, силы взаимодействия магнитных цепей более плавно меняются, и обеспечивается мягкое перемещение между полюсами. В итоге уменьшаются рывки во время работы.
По наличию контроллера шаговые двигатели делятся на два типа:
- Безконтроллерные. Используется Н-мостовая схема с возможностью менять полярность для реверса устройства. В зависимости от ситуации делается на микросхемном или транзисторном принципе. Сначала напряжение подается на мост, а, благодаря параллельно размещенным переключателям, осуществляется движение тока через обмотки мотора. Как результат, удается наладить вращение в любом направлении.
- Контроллерные. Преимущество исполнения стоит в возможности управления шаговым агрегатом в разных режимах. В роли ключевого элемента выступает электронный блок, который выдает группу сигналов и задает последовательность их передачи. Во избежание повреждения при КЗ или другой аварии на моторе каждый вывод защищен с помощью диода, не пропускающего импульс в обратном направлении.
К наиболее популярным относится две схемы управления — от контроллера с дифференциальным входом и выходом вида «открытый коллектор».
Первый вариант отличается надежной защитой от помех с подключением прямого / инверсного сигнала к подходящим полюсам. Здесь обязательно экранирование провода, по которому подается сигнал. Это оптимальное решение для маломощных устройств.
Вторая схема отличается соединением «плюсовых» выходов контроллера, подключенных к «плюсовому» выводу. При подаче напряжения свыше 9 В требуется добавление сопротивления для снижения тока. Кроме того, с помощью такого решения можно задать нужное число шагов в определенном скоростном режиме и задать ускорение.
Драйвер шагового двигателя
Управление шаговым двигателем невозможно без применения драйвера — электронного устройства, обеспечивающего его работу с учетом сигналов управления.
Иными словами, это элемент схемы, предназначенный для управления обмотками мотора путем подачи цифровых сигналов.
Благодаря такой конструкции, обеспечивается вращение ротора ШД. Драйвер работает после подключения источника питания, обмоток самого устройства и источника управляющего сигнала.
В зависимости от вида драйвера могут решать ряд дополнительных задач:
- контроль перегрузки по току, повышения напряжения и переполюсовки;
- автоматическое снижение тока в случае длительного простоя;
- защита от эффекта обратной ЭДС;
- построение простых схем перемещения без использования компьютера (встроенный генератор частоты) и т. д.
Конструктивно драйвер состоит из контроллера и силовой части. Первая составляющая создана на базе микропроцессора и может программироваться, а вторая представляет собой полупроводниковый усилитель мощности, цель которого состоит в преобразовании подаваемых на фазы токовых импульсов.
Драйверы условно делятся на три категории (по типу доставки тока):
- Постоянного напряжения. Подает высокий потенциал по очереди на каждую из обмоток. Суммарный ток зависит от сопротивления последних, а на больших оборотах — от индуктивности. Такие драйверы имеют низкую эффективность и могут применяться только на небольших скоростях.
- Двухуровневые. Сначала подается напряжение, благодаря которому ток в обмотке поднимается до нужной величины, после чего источник потенциала выключается, а ток поддерживается источником низкого напряжения. Такие драйверы имеют более высокую эффективность и уменьшают нагрев моторов. Работают в режиме полного и половины шага.
- ШИМ-типа. Пользуются наибольшим спросом, благодаря надежности и удобству управления. Их особенность состоит в подаче на обмотку ШИМ-сигнала высокого напряжения, отсекаемого небольшим током. Такие драйверы отличаются интеллектуальностью и возможностью программирования.
Кроме того, драйверы шаговых двигателей отличаются по типу. Они бывают аналоговыми, цифровыми и с энкодером. Поговорим о них более подробно.
Аналоговые
Отличаются высокой надежностью и эффективностью, благодаря сравнительно небольшому потреблению тока.
Задача таких устройств состоит в попеременной подаче импульса в разные обмотки статора с учетом заранее заданной программы. При этом обеспечивается определенный угол и направление вращения.
Плюсы аналоговых драйверов:
- низкая цена;
- защита от КЗ и высокого напряжения;
- автоматическое снижение тока;
- отсутствие риска случайного перегрева.
К основным моделям можно отнести:
- CW-230. Предназначен для управления биполярным шаговым агрегатом на две фазы с максимальным током до 3 А. Мотор может управляться в режиме до 1/64 шага. Управление силовым узлом осуществляется с помощью трех сигналов, подаваемых на дифференциальные входы. Плюсы: низкая цена, изоляция входных сигналов, защита от ошибочного подключения, КЗ и высокого напряжения.
- QJ Предназначен для управления биполярным ШД с двумя фазами и предельным током до 4,5 А. Доступно управление в режиме до 1/256 шага. Для управления применяется три сигнала, которые подают на входы PUL, DIF и ENA. Благодаря такой особенности, можно подключиться к LPT-порту ПК и успешно работать с программой ЧПУ станков. Плюсы: полный набор защит, автоматическое снижение тока, изолированные входные сигналы, доступная стоимость.
- QJ6060AC — предназначен для управления 2-фазным шаговым двигателем. Наибольший параметр тока — до 6 Ампер на каждую из фаз. Доступно управление с 1/128 шага. Для управления применяется три сигнала (как в рассмотренной выше модели). Доступно подключение ШД для ЧПУ станков и ряда плоттеров.
Цифровые
Это более современные модели, работающие на базе цифрового управляющего сигнала. В основе лежит 32-разрядный процессор, повышающий характеристики применяемого оборудования.
ШД, работающие с таким драйвером, выделяет низкий уровень вибрации, минимальный нагрев, небольшой уровень шума.
Преимущества цифровых устрой
Шаговый двигатель принцип работы
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления. Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360° ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360°/ 100 шагов = 3,6°за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих). Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9°на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360°/ (50 × 4)).
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Смотрите также: Правила рациональных покупок: как не тратить лишних денег в супермаркете
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5°. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5°.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1°, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей.
Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель — это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
Шаговые двигатели выбор и расчет основных параметров.
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. Вал шагового двигателя вращается с дискретным шагом, когда на него подаются управляющие импульсы в правильной последовательности. Вращение двигателей напрямую зависит от входящих импульсов, так же они напрямую управляют направлением и скоростью вращения вала двигателя.
Преимущества и недостатки шагового двигателя:
Преимущества:
— угол поворта двигателя пропорционален входным импульсам;
— фиксация положения при остановке током удержания;
— точное позиционирование и повторяемость движения, так как большинство шаговых двигателей имеют точность 3-5% шага, и эта ошибка не суммируется от одного шага к следующему;
— низкая инертность при запуске, остановке и реверсе;
— высокая надежность, поскольку в двигателе отсутствуют контактные щетки, поэтому срок службы двигателя в основном зависит от срока службы подшипников;
— реакция двигателя на цифровые входные импульсы обеспечивает управление без обратной связи, что делает систему более простой и, следовательно, более экономичной;
— можно достичь очень низкой скорости синхронного вращения с нагрузкой, которая напрямую связана с валом;
— можно реализовать широкий диапазон скоростей вращения, так как скорость пропорциональна частоте входных импульсов;
— шаговые двигатели дешевле серводвигателей.
Недостатки:
— может возникнуть явление резонанса, при некорректном расчете узла или системы управления;
— двигатель непрост вэксплуатации наочень высоких скоростях, 3000+ об/мин;
— сложность системы управления;
— падение мощности с ростом скорости вращения;
— отсутствие обратной связи;
— невысокая удельная мощность;
— низкая скорость вращения;
— шум.
Выбор шагового двигателя.
Шаговый двигатель можно использовать когда требуется контролируемое движение. Они могут использоваться в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизацию. Из-за присущих выше преимуществ, шаговые двигатели нашли свое место в различных устройствах: принтеры, плоттеры, лазерные резаки, гравировальные станки, устройства захвата и так далее.
При выборе шагового двигателя для вашего устройства необходимо учитывать несколько факторов:
Как двигатель будет связан с нагрузкой?
Какие скорость и ускорения необходимо реализовать?
Какой крутящий момент необходим для перемещения исполнительного механизма?
Какая степень точности требуется при позиционировании?
Количество полюсов (однополюсный/биполярный)
Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели. Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а однополярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют четырехфазным двигателем, хотя он имеет только две фазы. Двигатели с двумя отдельными обмотками на фазу могут приводиться в двухполярный или однополярный режим. Желательно, чтобы количество проводов на двигателе соответствовало количеству контактов на драйвере, чтобы не заниматься различными ухищрениями при подключения.
Номинальный ток
Обычно указывается максимальный ток, который подается одновременно на обе обмотки. Максимальный ток через одну обмотку (который действительно имеет значение при использовании микрошагов) указывается достаточно редко. При подаче номинального тока на одну обмотку происходит нагрев двигателя, из-за этого обычно ограничивают ток двигателя не более 85% от номинального тока. Для достижения максимального крутящего момента двигателя без перегрева, необходимо выбрать двигатель с номинальным током не более чем на 25% выше, чем рекомендуемый максимальный ток привода шагового двигателя.
Крутящий момент
Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, теплоотвода, рабочего цикла, обмотки двигателя и типа используемого привода. Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек собственных колебаний резонанса могут быть обнаружены либо по звуку, либо по датчикам вибрации. Полезный крутящий момент от шагового двигателя может быть резко уменьшен за счет резонансов. Работы на резонансных частотах следует избегать. Внешнее демпфирование, дополнительная инерция или применение микрошагов используются для уменьшения эффекта резонанса.
Удерживающий момент
Это максимальный крутящий момент, который может обеспечить двигатель, когда обе обмотки находятся под напряжением при полном токе. Крутящий момент пропорционален току (за исключением очень малых токов), поэтому, например, если вы установите драйверы на 85% от номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% от указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, который соответствует току в его обмотках. Когда шаговый двигатель ускоряется, возникает крутящий момент для преодоления собственной инерции ротора и массы нагрузки, приводимой в движении. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла.
Известно, что использование микрошага снижает крутящий момент. На самом деле это означает, что угол запаздывания равен углу, соответствующему одному микрошагу (поскольку вы хотите, чтобы положение было с точностью до одного микрошага), более высокое значение микрошага предполагает уменьшение угла, а значит и уменьшение крутящего момента. Крутящий момент на единицу угла (что действительно имеет значение) не уменьшается при увеличении микрошага. Иными словами, отправка импульса на двигатель на один микрошаг 1/16 приводит к точно таким же фазовым токам (и, следовательно, к тем же силам), что и к отправке двух 1/32 микрошагов или четырех 1/64 микрошагов и так далее.
Размер
Шаговые двигатели также классифицируются в соответствии с размерами корпуса, которые соответствуют размеру рамы двигателя. Например, шаговый двигатель NEMA11 имеет размер рамы приблизительно 1,1 дюйма (28 мм). Аналогично, шаговый двигатель NEMA23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может изменяться от двигателя к двигателю в рамках одной и той же классификации размеров, при этом крутящий момент двигателя с определенным размером рамы будет увеличиваться с увеличением длины корпуса.
NEMA8:
— габарит рамы 20х20 мм;
— диапазон длин: 30-42 мм;
— крутящий момент: 0,18-0,3 кг*см.
NEMA11
— габарит рамы 28х28 мм;
— диапазон длин: 32-51 мм;
— крутящий момент: 0,43-0,9 кг*см.
NEMA14
— габарит рамы 35х35 мм;
— диапазон длин: 28 мм;
— крутящий момент: 1,0 кг*см.
NEMA16
— габарит рамы 39х39 мм;
— диапазон длин: 20-38 мм;
— крутящий момент: 0,65-2,0 кг*см.
NEMA17
— габарит рамы 42х42 мм;
— диапазон длин: 25-60 мм;
— крутящий момент: 1,7-6,5 кг*см.
NEMA23
— габарит рамы 56х56 мм;
— диапазон длин: 41-76 мм;
— крутящий момент: 2,88-18,9 кг*см.
NEMA34
— габарит рамы 86х86 мм;
— диапазон длин: 65-156мм;
— крутящий момент: 34-122 кг*см.
NEMA43
— габарит рамы 110х110 мм;
— диапазон длин: 99-201 мм;
— крутящий момент: 112-280 кг*см.
NEMA51
— габарит рамы 130х130 мм;
— диапазон длин: 165-270 мм;
— крутящий момент: 270-500 кг*см.
Угол шага.
Существует два распространенных угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам/оборот. Большинство устройств используют двигатели с шагом 1,8 град/шаг.
При заданной скорости вращения 0,9-градусный двигатель производит вдвое больше индуктивной обратной эдс, чем 1,8-градусный двигатель, из-за этого возможно будет необходимо использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
Для двигателей 0,9 градуса необходимо подавать шаговые импульсы драйвера с удвоенной скоростью по сравнению с двигателями 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать шаговые импульсы.
Разрешение и точность позиционирования.
На разрешение и точность позиционирования системы шагового двигателя влияют несколько факторов: угол шага (длина полного шага шагового двигателя), выбранный режим движения (полный шаг, полшага или микрошаг) и скорость передачи. Это означает, что есть несколько различных комбинаций, которые можно использовать для получения желаемого разрешения, из-за этого проблема разрешения обычно может быть решена после того, как были определены размер двигателя и тип привода.
Самоиндукция .
Индуктивность двигателя влияет на скорость, с которой драйвер шагового двигателя может приводить двигатель в действие до падения крутящего момента. Если мы временно игнорируем обратную эдс из-за вращения, а номинальное напряжение двигателя намного меньше, чем напряжение питания привода, то максимальные обороты в секунду перед падением крутящего момента составляют:
оборотов_в_секунду=(2*напржение_БП)/(шагов_на оборот*3,14* индуктивность* ток)
Если двигатель приводит ремень GT2 через шкив, это дает максимальную скорость в мм/с как:
скорость=(4*кол-во_зубьев_шкива*напряжение_БП)/(шагов_на_оборот*3,14* индуктивность*ток)
Например:
двигатель 1,8 град/шаг ( т. е. 200 шагов/об) с индуктивностью 4 мГн работает при 1,5, А при напряжении питания 12 В, и привод ремня GT2 с 20-зубчатым шкивом начинает терять крутящий момент со скоростью около 250 мм/с.
На практике крутящий момент начинает падать раньше, чем это из-за обратной эдс, вызванной движением, потому что не учитывается сопротивление обмоток. Моторы с низкой индуктивностью также имеют низкую ЭДС из-за вращения. Для достижения высоких скоростей, необходимо выбирать двигатели с низкой индуктивностью и высоким напряжением питания.
Сопротивление и номинальное напряжение
Это сопротивление на фазу и падение напряжения на каждой фазе, когда двигатель неподвижен, и фаза передает свой номинальный ток (который является результатом сопротивления и номинального тока). Это важно когда номинальное напряжение значительно ниже напряжения питания для шаговых драйверов.
Обратный ЭДС из-за вращения
Когда шаговый двигатель вращается, то создается обратная эдс. При идеальном нулевом угле запаздывания на 90 градусов не в фазе с напряжением возбуждения, а в фазе с обратной ЭДС из-за индуктивности. Когда двигатель выдает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратный ЭДС из-за поворота обычно не указывается в спецификации, но мы можем оценить его по следующей формуле:
ЭДС= 1,414*3,14*момент_удержания*оборотов_в_секунду/номинальный_ток
Формула предполагает, что удерживающий момент указан для обеих фаз, находящихся под напряжением при номинальном токе. Если это указано только с одной фазой под напряжением, замените 1,414 на 2.
Пример: рассмотрим 200-шаговый двигатель, приводящий каретку через шкив с 20 зубцами и ремень GT2. Это 40-миллиметровое движение за оборот. Для достижения скорости 200 мм/сек нам нужно 5 об/сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают при 1,68, А, пиковая обратная эдс из-за вращения составляет
1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Как вбрать необходимое напряжение питания
Если заранее известна необходимая скорость движения для вашего устройства, можно предварительно определить, какое напряжение питания вам потребуется для драйверов двигателя.
Пример: определим необходимую скорость движения. Для этого примера будем использовать 200 мм/сек, передача шкив 20 зубьев GT2.
Исходя из необходимой скорости движения, определим максимальную скорость ремня.
Прикинем обратную ЭДС от индуктивности:
напряжение=шагов_в_сек*3,14*ток_двигателя*ЭДС_двигателя*N/2
где N — число полных шагов на оборот (200 для двигателей с 1,8 градусами или 400 для двигателей с 0,9 градусами).
Возьмем для примера двигателя со следующими параметрами: 0,9 градуса с индуктивностью 4,1 мГн, и токе 1А. Таким образом, обратная эдс из-за индуктивности составляет:
5*3,142*1,0*4,1e-3*400/2 = 12,87 В
Вычислим обратную ЭДС из-за вращения по приведенной ранее формуле.
Двигатели для примера имеют номинальный ток 1,68А и момент удержания 0,44 Нм, поэтому результат равен:
1,414*3,142*0,44*8,7/1,68 = 10,1 В
Предпочтительно, чтобы напряжение питания драйвера составляло по меньшей мере сумму этих двух обратных эдс, плюс еще несколько вольт запаса. При использовании двух двигателей последовательно требуемое напряжение удваивается.
Алгоритм выбора шагового двигателя
1. Определение компонента механизма привода .
Определите механизм и необходимые входные данные, вариант механизма, приблизительные размеры, расстояния перемещения и время позиционирования.
2. Рассчитайте необходимое разрешение.
Найдите разрешение, необходимое для двигателя. Исходя из требуемого разрешения, определите, будет ли использоваться только двигатель или мотор-редуктор . Тем не менее, благодаря использованию технологии микрошагов, достичь требуемого разрешения стало гораздо легче.
3. Определите схему работы
Определите схему работы, которая соответствует требуемым данных. Рассчитайте значения ускорения (замедления) и скорость рабочего импульса, чтобы рассчитать момент ускорения.
4. Рассчитайте необходимый крутящий момент.
Рассчитайте момент нагрузки и момент ускорения и найдите требуемый момент, требуемый двигателем.
5. Выберите двигатель.
Сделайте предварительный выбор двигателя на основе требуемого крутящего момента. Определите используемый двигатель по характеристикам скорости и крутящего момента.
6. Проверьте выбранный двигатель.
Подтвердите скорость ускорения / замедления и коэффициент инерции.
Общие рекомендации:
— если не планируется использовать внешние драйверы шаговых двигателей, выбирайте двигатели с номинальным током не менее 1,2, А и не более 2,0 А.
— рассчитывайте на рабочий ток шагового двигателя 50-85% от номинального.
— размер:
Nema 17- самый популярный размер, используемый в домашних проектах.
Nema 23 необходимо использовать если не хватает крутящего момента от длинных двигателей Nema 17.
— старайтесь не использовать двигатели с номинальным напряжением (или произведением номинального тока и фазового сопротивления)> 4 В или индуктивности> 4 мГн.
— выборйте двигатель с 0,9 град/шаг, если необходима дополнительная точность позиционирования, для стандартных решений используйте двигатели 1,8 град/шаг.
— при использовании 0,9 градусных шаговых двигателей или двигателей с высоким крутящим моментом, необходимо применение блоков питания с напряжением 24 В, чтобы поддерживать крутящий момент на более высоких скоростях.
Шаговые электродвигатели — устройство и принцип работы, виды шд
Сегодня речь пойдет от такой разновидности электродвигателях, как шаговые. Мы подготовили объемный материал, в котором подробно расписаны технические характеристики, устройство и сам принцип работы шаговых двигателей. В конце статьи вас ждет подробное руководство по изготовлению драйвера шд собственными руками, ну и как бонус список подробной литературы по теме. Любые вопросы, как всегда, вы можете задать в комментариях.
Устройство и принцип работы
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах.
Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма.
Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Из чего состоит шаговый двигатель
Как работает шаговый электродвигатель?
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.
- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Характеристики
Шаговый двигатель с точки зрения механики и электротехники очень сложное устройство, имеющее много механических и электрических параметров. Приведу расшифровку основных технических параметров, которые используются на практике:
- Количество полных шагов за один оборот. Основной параметр двигателя, определяющий его точность, разрешающую способность, плавность движения. На двигателях серии FL57 этот параметр составляет 200 и 400 шагов на оборот.
- Угол полного шага. Представление в другом виде предыдущего параметра. Показывает на какой угол повернется вал при одном полном шаге. Может быть подсчитан как 360° / количество полных шагов за оборот. Для двигателей серии FL57 составляет 1,8 ° и 0,9°.
- Номинальный ток. Основной электрический параметр. Наибольший допустимый ток, при котором электродвигатель может работать сколь угодно длительное время. Для этого тока указаны механические параметры двигателя.
- Номинальное напряжение. Допустимое постоянное напряжение на обмотке двигателя в статическом режиме. Часто этот параметр не приводится. Вычисляется по закону Ома через номинальный ток и сопротивление обмотки.
- Сопротивление обмотки фазы. Сопротивление обмотки двигателя на постоянном токе. Параметр вместе с номинальным током, показывает какое напряжение можно подавать на обмотку двигателя.
- Индуктивность фазы. Параметр становится важным на значительных скоростях вращения. От него зависит скорость нарастания тока в обмотке. При высоких частотах переключения фаз приходится увеличивать напряжение, чтобы ток нарастал быстрее.
- Крутящий момент. Основной механический параметр. Показывает максимальный крутящий момент, который способен создать двигатель. Иногда приводится механическая характеристика в виде зависимости крутящего момента от частоты вращения.
- Момент инерции ротора. Характеризует механическую инерционность ротора двигателя. Чем этот параметр меньше, тем двигатель быстрее разгоняется.
- Удерживающий момент. Это крутящий момент при остановленном двигателе. При этом у двигателя должны быть запитаны две фазы номинальным током.
- Стопорный момент. Момент, необходимый чтобы провернуть вал двигателя при отсутствующем напряжении питания.
- Сопротивление изоляции. Как у всех электрических приборов – сопротивление между корпусом и обмотками.
- Пробивное напряжение. Минимальное напряжение, при котором происходит пробой изоляции между обмотками и корпусом. Параметр из раздела электробезопасности.
Типы шаговых двигателей
Основные виды шаговых двигателей:
• с переменным магнитным сопротивлением
• с постоянными магнитами
• гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы.
Зубцы притягиваются к полюсам. Этим и обеспечивается вращение. При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей. Применяются они довольно редко.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя идентичен двигателям с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора. У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°). При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты.
По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов. Это самый распространенный тип шаговых двигателей.
УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера.
Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов.
Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.
БИПОЛЯРНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут.
Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
Униполярные шаговые двигатели, в отличие от биполярных, имеют два вывода за фазу, ни одна из которых не является общей. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
С целью автоматизации некоторых производственных процессов на предприятии, иногда возникает необходимость перемещения объектов в плоскости. Чтобы это сделать, потребуется использовать специальный преобразователь вращательного движения в поступательное, что достигается путем применения кинематики.
При помощи линейных шаговых двигателей можно преобразовать импульсную команду прямо в линейное перемещение, что значительно упростит кинематическую схему всевозможных электрических приводов.
Принципиальная схема работы линейного шагового двигателя
Статор в данном приводе представлен в виде магнитомягкой плиты, а провода подмагничиваются путем работы постоянного магнита.
Зубцовые деления в статоре и подвижной части одинаковые, при этом они могут быть сдвинуты на половину деления в пределах одного провода ротора. Поток подмагничивания и его магнитное сопротивление, в данном случае, не зависят от того, где находится подвижная часть двигателя.
Чтобы переместить объект в плоскости согласно двум координатам, применяют двигатели двухкоординатного типа.
Также в линейных двигателях используется магнитно-воздушная подвеска. Благодаря силе магнитного притяжения ротор притягивается к статору. Далее под ротор сквозь форсунки нагнетают воздух в сжатом виде, вследствие чего появляется сила, отталкивающая ротор от статора.
Так между ними возникает воздушная подушка и ротор висит над статором с наличием минимально зазора. Это и обеспечивает минимум сопротивления движения ротора и высокоточное позиционирование.
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)
Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive
Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive
Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
• полношаговый
• полушаговый
• микрошаговый.
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
полушаговый режим
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
микрошаговый режми
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Контроллер управления шаговыми двигателями, сделанный своими руками
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления.
Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):
Работа над схемой:
Разводим печатную плату:
Фотошаблон готов:
Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Главное — подобрать экспозицию:
Идет процесс травления печатной платы:
Протравлена полностью:
Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:
Паяльник старенький да удаленький:
Забиваем плату деталями:
Все детали запаяны:
Обратная сторона платы, начался процесс отладки:
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:
В данное время началась работа над пультом. Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
… И, так, после продолжительного перерыва снова продолжил работу над этим проектом.
Немного поигрался с разными вариантами дизайна пульта и, вот, к чему я пришел:
Недостатки и достоинства шаговых двигателей
Преимущества шаговых двигателей
• Точное позиционирование без обратной связи. Число импульсов определяет угол поворота.
• Двигатель обеспечивает полный крутящий момент при снижении скорости вращения, вплоть до остановки.
• Двигатель фиксирует свое положение при остановке за счет тока удержания.
• Регулировка скорости вращения с высокой точностью без обратной связи.
• Способность быстрого старта, остановки, реверса.
• Высокая надежность. Отсутствие коллекторных щеток. Недостатки шаговых двигателей.
• Сложная система управления.
• Невысокие скорости вращения.
• Возможно явление резонанса.
• Может произойти потеря позиционирования при механических перегрузках.
• Низкая удельная мощность.
Попробуем найти минусы
Как и всему на свете шаговому двигателю присущи определенные достоинства и недостатки.
Но есть области в точной механике, в которых он просто незаменим. Там где надо перемещать механические узлы, мгновенно останавливать, двигать назад, регулировать скорость… Попробуйте мгновенно остановить коллекторный двигатель, и вы забудете о недостатках шагового.
Попробуйте реализовать изменение скорости коллекторного двигателя в широких пределах. Проще поставить шаговый с его недостатками.
Заключение.
В завершении объемной статьи хочу выразить благодарность источникам, откуда мы черпали информацию:
http://robotosha.ru
http://chipok.ru
https://ru.wikipedia.org
Заключение
Если вам была полезна статья и вы желаете отблагодарить автора, то подпишитесь на нашу рассылку вк. Кстати, тех кто вступит ждет в подарок Энциклопедия начинающего электрика в PDF файле. Ну и будете получать статьи с нашего сайта самыми первыми. Без рекламы и спама, не потому что мы такие честные, а потому что модерация вк очень строгая.
Список дополнительной литературы по шаговым двигателям:
AN2974
doc8017
SKC_stepper_operation
Step_Motor_Basics_Guide
Как вам статья?Poll Options are limited because JavaScript is disabled in your browser. Предыдущая
Электрические машиныМалоизвестные факты о двигателях постоянного тока
Следующая
Электрические машиныЧто такое трехфазный двигатель и как он работает
Типы, работа и применение
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрическую энергию в механическую. Кроме того, это бесщеточный синхронный электродвигатель, который может разделить полный оборот на большое количество шагов. Положение двигателя можно точно контролировать без какого-либо механизма обратной связи, если двигатель точно рассчитан для конкретного применения. Шаговые двигатели аналогичны вентильным реактивным двигателям.
Шаговый двигатель использует теорию работы магнитов, чтобы вал двигателя вращался на точное расстояние при подаче электрического импульса.У статора восемь полюсов, а у ротора — шесть. Ротору потребуется 24 импульса электричества, чтобы переместить 24 ступени на один полный оборот. Другими словами, ротор будет двигаться точно на 15 ° за каждый электрический импульс, который получает двигатель.
Шаговый двигатель
Типы шаговых двигателей:
Существует три основных типа шаговых двигателей, это:
- Шаговый двигатель с постоянным магнитом
- Гибридный синхронный шаговый двигатель
- Шаговый двигатель с переменным магнитным сопротивлением
Шаговый двигатель с постоянным магнитом: Двигатели с постоянными магнитами используют постоянный магнит (PM) в роторе и работают за счет притяжения или отталкивания между PM ротора и электромагнитами статора.
Шаговый двигатель с переменным сопротивлением: Двигатели с регулируемым сопротивлением (VR) имеют ротор из гладкого железа и работают по принципу, согласно которому минимальное сопротивление достигается при минимальном зазоре, следовательно, точки ротора притягиваются к полюсам магнита статора.
Гибридный синхронный шаговый двигатель: Гибридные шаговые двигатели названы так, потому что в них используется комбинация методов постоянного магнита (PM) и переменного магнитного сопротивления (VR) для достижения максимальной мощности при небольшом размере корпуса.
Преимущества шагового двигателя:
- Угол поворота двигателя пропорционален входному импульсу.
- Двигатель в состоянии покоя развивает полный крутящий момент.
- Точное позиционирование и повторяемость движения, так как хорошие шаговые двигатели имеют точность 3–5% шага, и эта ошибка не накапливается от одного шага к другому.
- Отличная реакция на пуск, остановку и задний ход.
- Очень надежен, так как в моторе нет контактных щеток.Следовательно, срок службы двигателя просто зависит от срока службы подшипника.
- Реакция двигателя на цифровые входные импульсы обеспечивает управление без обратной связи, что упрощает управление двигателем и снижает его стоимость.
- Можно достичь очень низкоскоростного синхронного вращения с нагрузкой, непосредственно связанной с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Приложения:
- Промышленные машины — Шаговые двигатели используются в автомобильных датчиках и станках, в автоматизированном производственном оборудовании.
- Security — новые продукты видеонаблюдения для индустрии безопасности.
- Медицина — Шаговые двигатели используются в медицинских сканерах, пробоотборниках, а также в цифровой стоматологической фотографии, жидкостных насосах, респираторах и оборудовании для анализа крови.
- Бытовая электроника — Шаговые двигатели в камерах для автоматической фокусировки и масштабирования цифровых камер.
А также есть приложения для бизнес-машин, приложения для компьютерной периферии.
Работа шагового двигателя:
Шаговые двигатели работают иначе, чем щеточные двигатели постоянного тока, которые вращаются, когда на их клеммы подается напряжение. Шаговые двигатели, с другой стороны, фактически имеют несколько зубчатых электромагнитов, расположенных вокруг куска железа в форме центральной шестерни. Электромагниты получают питание от внешней схемы управления, например, микроконтроллера.
Схема шагового двигателя
Чтобы заставить вал двигателя вращаться, сначала на один электромагнит подается энергия, которая заставляет зубья шестерни магнитно притягиваться к зубцам электромагнита.В момент, когда зубья шестерни совмещены с первым электромагнитом, они слегка смещены относительно следующего электромагнита. Поэтому, когда следующий электромагнит включается, а первый выключается, шестерня слегка поворачивается, чтобы выровняться со следующей, и оттуда процесс повторяется. Каждое из этих небольших поворотов называется шагом, при котором целое число шагов совершает полный оборот. Таким образом, мотор можно вращать с помощью точного. Шаговые двигатели не вращаются постоянно, они вращаются ступенчато.На статоре закреплены 4 катушки с углом 90 o между собой. Подключение шагового двигателя определяется способом соединения катушек. В шаговом двигателе катушки не соединены. Двигатель имеет шаг вращения 90, — , при этом на катушки подается питание в циклическом порядке, определяющем направление вращения вала. Работа этого двигателя отображается с помощью переключателя. Катушки активируются последовательно с интервалом в 1 секунду. Вал вращается на 90 o каждый раз, когда активируется следующая катушка.Его крутящий момент на низкой скорости будет напрямую зависеть от тока.
Управление шаговым двигателем с помощью изменяющихся тактовых импульсов
Схема управления шаговым двигателем — это простая и недорогая схема, в основном используемая в приложениях с низким энергопотреблением. Схема, представленная на рисунке, состоит из 555 таймеров IC как стабильного мультивибратора. Частота рассчитывается с использованием приведенного ниже соотношения:
Частота = 1 / T = 1,45 / (RA + 2RB) C, где RA = RB = R2 = R3 = 4,7 кОм и C = C2 = 100 мкФ.
Управление шаговым двигателем путем изменения тактовых импульсов
Выход таймера используется в качестве тактового сигнала для двух двойных триггеров 7474 «D» (U4 и U3), сконфигурированных как счетчик звонков.При первоначальном включении питания устанавливается только первый триггер (т. Е. Выход Q на выводе 5 U3 будет на логической «1»), а остальные три триггера сбрасываются (т. Е. Выход Q находится в логической 0). При получении тактового импульса выход логической «1» первого триггера смещается на второй триггер (вывод 9 U3). Таким образом, выход логической 1 продолжает циклически сдвигаться с каждым тактовым импульсом. Выходы Q всех четырех триггеров усиливаются решетками транзисторов Дарлингтона внутри ULN2003 (U2) и подключены к обмоткам шагового двигателя оранжевого, коричневого, желтого, черного цветов на 16, 15, 14, 13 ULN2003, а красный — на + ve поставка.
Общая точка обмотки подключена к источнику постоянного тока +12 В, который также подключен к выводу 9 ULN2003. Цветовой код, используемый для обмоток, может варьироваться от производителя к производителю. При включении питания управляющий сигнал, подключенный к контакту SET первого триггера и контактам CLR трех других триггеров, становится активным ‘низким’ (из-за схемы включения питания при сбросе, сформированной R1- Комбинация C1), чтобы установить первый триггер и сбросить остальные три триггера. При сбросе Q1 IC3 становится «высоким», в то время как все остальные выходы Q становятся «низкими».Внешний сброс может быть активирован нажатием переключателя сброса. Нажав переключатель сброса, вы можете остановить шаговый двигатель. Двигатель снова начинает вращаться в том же направлении, если отпустить переключатель сброса.
Теперь у вас есть представление о типах супермоторов и их применении. Если у вас есть какие-либо вопросы по этой теме или электрические и электронные проекты, оставьте комментарии ниже.
Фото предоставлено:
РЕЖИМЫ РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ, ОБЗОР КОНТРОЛЛЕРА ШАГОВОГО ДВИГАТЕЛЯ И ИНФОРМАЦИЯ, КАСАЮЩАЯСЯ МНОГООСНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Шаговые двигатели
имеют три режима работы — полный, половинный и микрошаговый — а выходная мощность шагового двигателя определяется конструкцией драйвера.
Полный шаг
Типичные гибридные шаговые двигатели сочетают в себе сильные стороны двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Обычно они имеют двести зубцов ротора, то есть двести полных шагов на каждый оборот вала двигателя (или одну целую восемьдесят градусов на шаг). Работа в режиме полного шага достигается за счет подачи питания на обе обмотки двигателя при попеременном реверсировании тока. Один импульс от генератора шагового двигателя равен одному шагу.
Полушаг
В полушаговом режиме шаговый двигатель вращается с частотой четыреста шагов за каждый оборот.Одна обмотка запитывается за другой, что заставляет двигатель вращаться наполовину (точка девять градусов). Хотя полушаговый режим обеспечивает более плавное вращение, чем полный шаг, он обеспечивает примерно на тридцать процентов меньше крутящего момента.
Microstep
Операция микрошага делит каждый шаг на двести пятьдесят шесть дискретных микрошагов, что позволяет выполнить пятьдесят одну тысячу двести шагов на каждый оборот (ноль ноль семь градусов на шаг). Микрошаг обычно используется в ситуациях, когда требуется высокоточное позиционирование и плавное движение в более широком диапазоне скоростей.Как и в случае полушага, микрошаг улучшает управление движением за счет уменьшения крутящего момента.
Обмотки шагового двигателя соединены последовательно или параллельно: последовательные соединения обеспечивают больший крутящий момент на низких скоростях, в то время как параллельные соединения снижают индуктивность, обеспечивая больший крутящий момент на более высоких скоростях. Зависимость крутящего момента шагового двигателя от его скорости зависит от выходного напряжения драйвера. Электропривод должен быть ограничен по току относительно номинала шагового двигателя, поскольку выходная мощность драйвера может быть в двадцать раз выше, чем напряжение двигателя.
Контроллеры шаговых двигателей
Контроллер (или индексатор) шагового двигателя обеспечивает вывод шагов и направления для водителя, и для большинства функций шагового двигателя контроллер должен регулировать ускорение, замедление, количество шагов в секунду и расстояние. Кроме того, контроллер шагового двигателя может получать различные высокоуровневые команды от хоста и генерировать соответствующие импульсы шага и направления для драйвера. Контроллер шагового двигателя также может работать независимо (т.е. без хозяина).
Многоосевой
Многокоординатные системы управления перемещением используются, когда используется более одного шагового двигателя. Обычная многоосная система может быть подключена к четырем шаговым приводам, каждый из которых подключен к собственному шаговому двигателю. Эта многоосная втулка обеспечивает скоординированное движение в ситуациях, когда требуется максимальная синхронизация (например, круговая или линейная интерполяция).
Внедрить модель шагового двигателя — Simulink
Simscape / Electrical / Specialized Power Systems / Fundamental Blocks / Machines
Описание
Блок Stepper Motor (STM) реализует общую модель, которая представляет два самых популярных
семейства шаговых двигателей:
Модель шагового двигателя состоит из электрической и механической частей.Электрический
сечение представлено схемой замещения, конфигурация которой зависит от двигателя.
тип. Эквивалентные схемы предполагают, что магнитная цепь является линейной (без насыщения) и
взаимная индуктивность между фазами незначительна. Механическая часть представлена
модель в пространстве состояний, основанная на моменте инерции и коэффициенте вязкого трения.
На этом рисунке показана эквивалентная схема для одной фазы в шаговом двигателе с регулируемым сопротивлением.
мотор.
В этой модели R a и
L a ( θ ), соответственно, представляют
сопротивление и индуктивность обмотки фазы А.Индуктивность обмотки изменяется как
функция положения ротора:
L a ( θ ) =
П 0 +
L 1 cos ( N r θ ),
где,
L 0 — средняя индуктивность.
L 1 — максимальное изменение индуктивности.
N r — номер зубьев ротора.
В исходном положении ( θ = 0) зуб ротора полностью совмещен с
полюс оси A для достижения максимальной индуктивности обмотки фазы A.
Общий электромагнитный крутящий момент, создаваемый двигателем, складывается из произведенных крутящих моментов.
по фазам двигателя:
где,
м — количество фаз.
i x — ток обмотки в фазе
х .L x — это функция индуктивности от фазы
х обмотка.
На этом рисунке показана эквивалентная схема для одной фазы в постоянном магните (PM) или гибридном
шаговый двигатель.
В этой модели R a и
L a , соответственно, представляют сопротивление и
индуктивность обмотки фазы А. Из-за большого размера воздушного зазора, создаваемого магнитами,
индуктивность обмотки PM или гибридного шагового двигателя может считаться независимой от
положение ротора.Источник напряжения
e a ( θ ) представляет заднюю часть двигателя
электродвижущая сила (ЭДС), которая является синусоидальной функцией положения ротора:
ea (θ) = — pψmsin (pθ) dθdt,
где,
Обратите внимание, что в исходном положении ( θ = 0) северный полюс ротора
полностью совмещен с полюсом оси А для достижения нулевого значения противо-ЭДС фазы А.
Электромагнитный момент, создаваемый двухфазным двигателем с постоянными магнитами или гибридным шаговым двигателем, равен
сумма крутящего момента, возникающего в результате взаимодействия фазных токов и магнитных потоков
создаваемый магнитами и фиксирующим моментом, который возникает из-за выраженности
ротор:
T e =
— pψ м i a sin ( pθ )
—
pψ м i b sin ( pθ
— π /2) —
T дм sin ( м Nrθ ).
где,
Как получить параметры шагового двигателя
Параметры, используемые в модели шагового двигателя, обычно берутся из данных производителя
листы. Если параметры недоступны, вы можете определить их экспериментальным путем.
измерения.
Параметры шагового двигателя с переменным сопротивлением
Параметры, указанные в технических паспортах производителя, обычно: количество фаз, время выдержки.
крутящий момент, угол шага, напряжение на фазу, ток на фазу, сопротивление обмотки,
R a , максимальная индуктивность,
L max , средняя индуктивность,
L 0 , и инерция ротора J .
Параметры гибридного шагового двигателя с постоянным магнитом
Параметры, указанные в технических паспортах производителя, обычно:
количество фаз
удерживающий момент
угол шага
напряжение на фазу
ток на фазу
сопротивление обмотки, R a
Инерция ротора, Дж
обмотка
индуктивность, L a
Максимальный момент фиксации, T dm , не всегда
указано.Этот параметр можно принять равным 1-10% от максимального удерживающего момента.
Максимальный потокосцепление, ψ м , не всегда
указано. Этот параметр можно получить экспериментально, доведя двигатель до постоянного
частота вращения, N , в об / мин, и путем измерения максимального напряжения холостого хода обмотки,
E m , в V.
Параметр ψ m затем вычисляется по следующей формуле:
, где p — количество пар полюсов, задаваемое формулой p = 360 / (2 м · шаг ).Здесь м = номер фазы, шаг = шаг
угол в градусах.
Ссылки
[1] T. Kenjo, A. Sugawara, Шаговые двигатели и их микропроцессоры
Controls , 2-е издание, Oxford University Press, Oxford, 2003.
[2] П. Акарнли, Шаговые двигатели — Руководство по теории и практике ,
4-е издание, Институт инженеров-электриков, Лондон, 2002.
Сравнение электродвигателей (постоянный ток, сервопривод и шаговый двигатель)
Нужен двигатель для вашего проекта, но вы не уверены, какой тип выбрать? Мы предлагаем несколько различных разновидностей функциональных плат для управления двигателем.Мы надеемся, что это краткое изложение разницы между двигателями постоянного тока, сервоприводами и шаговыми двигателями поможет вам решить, какой двигатель лучше всего подходит для использования!
Двигатели постоянного тока
Двигатели постоянного тока (постоянного тока) двухпроводные (питание и заземление), двигатели постоянного вращения. Когда эти провода подключены к источникам питания, двигатель постоянного тока начинает вращаться, пока это питание не будет отключено. Большинство двигателей постоянного тока работают на высоких оборотах (оборотов в минуту). Двигатели постоянного тока могут использоваться для охлаждающих вентиляторов компьютеров, радиоуправляемых автомобилей или других автомобильных приложений.
В основном скорость двигателей постоянного тока регулируется с помощью широтно-импульсной модуляции (ШИМ). Используя эту технику, мы быстро включаем и выключаем питание. Процент времени, затраченного на переключение отношения включения / выключения, определяет скорость двигателя. Например, если мощность циклически изменяется на 50% (половина включена, половина выключена), то двигатель будет вращаться на половине скорости вашей максимальной скорости (полностью включен). Каждый импульс настолько быстр, что кажется, что двигатель непрерывно вращается без заиканий.
Серводвигатели
Мы можем говорить о серводвигателях как о сборке из четырех элементов: двигателя постоянного тока, зубчатой передачи, цепи управления и датчика положения (обычно потенциометра).
В промышленности серводвигатели известны как двигатели, которыми можно управлять наиболее точно. По сравнению со стандартными двигателями постоянного тока сервоприводы обычно имеют три провода (питание, заземление и управление). Электроэнергия к серводвигателям подается постоянно. Сервоконтроллер регулирует потребляемый ток для привода двигателя. Эти двигатели предназначены для решения более конкретных задач, когда необходимо определить положение. Кроме того, серводвигатели используются для точных задач, например, для перемещения руки или ноги робота в пределах определенного диапазона, перемещения камеры к определенному объекту и т. Д.
Тем не менее, мы должны упомянуть, что серводвигатели не вращаются свободно, как стандартные двигатели постоянного тока, если они не модифицированы для непрерывного вращения. У двигателей этого типа нет ограничения на диапазон движения, и вместо того, чтобы входной сигнал определял, в какое положение должен вращаться сервопривод, сервопривод непрерывного вращения связывает входные данные со скоростью и направлением выхода. Однако для большинства серводвигателей угол поворота ограничен 180 градусами вперед и назад. Серводвигатель получает управляющий сигнал, который представляет собой выходное положение, и подает питание на двигатель постоянного тока, пока вал не повернется в точное положение, определяемое датчиком положения.
В отличие от двигателей постоянного тока, для управления серводвигателем используется сигнал ШИМ. Длительность положительного импульса, который определяет положение, а не скорость сервовала. Значение нейтрального импульса, зависящее от сервопривода (обычно около 1,5 мс), удерживает вал сервопривода в центральном положении. Увеличение значения этого импульса заставит сервопривод вращаться по часовой стрелке, а более короткий импульс повернёт вал против часовой стрелки. Импульс сервоуправления обычно повторяется каждые 20 миллисекунд (зависит от серводвигателя).Мы всегда должны указывать сервоприводу, куда идти, даже если это означает оставаться в том же положении.
Когда сервопривод получает команду на перемещение, он переместится в положение и будет пытаться сохранить это положение, даже если на него будет воздействовать внешняя сила.
Шаговые двигатели
Шаговый двигатель — это, по сути, серводвигатель, который использует другой метод управления. В шаговых двигателях используется несколько зубчатых электромагнитов, расположенных вокруг центральной шестерни для определения положения.
Для управления шаговым двигателем нам нужна внешняя схема управления или микроконтроллер (например, Raspberry Pi или Arduino) для индивидуального питания каждого электромагнита и вращения вала двигателя. Когда первый «А» и второй «В» электромагниты включены, вал двигателя совмещается между ними. Когда «A» выключен, а «B» включен, шестерня вращается, чтобы выровняться с магнитом «B». С каждым электромагнитом вокруг шестерни мы включаем и выключаем их по очереди, чтобы создать вращение. Каждое вращение от одного электромагнита к другому называется «шагом», и, таким образом, двигатель может вращаться на точно заданные углы шага посредством полного вращения на 360 градусов.
Конструкция шагового двигателя обеспечивает постоянный удерживающий момент без необходимости включения двигателя.
г
Резюме
Это краткий обзор преимуществ и недостатков двигателей постоянного тока, шаговых и серводвигателей. Надеюсь, это поможет вам сделать более осознанный выбор в соответствии с потребностями вашего проекта.
Двигатели постоянного тока:
Быстрое, непрерывное вращение. Наконец, они используются для всего, что нужно для вращения на высоких оборотах e.грамм. автомобильные колеса, вентиляторы, дрели и т. д.
Серводвигатели:
Могут быть очень быстрыми, с высоким крутящим моментом, очень точным вращением в пределах ограниченного угла. Обычно это высокопроизводительная альтернатива шаговым двигателям, но более сложная настройка с настройкой PWM. Подходит для роботизированных рук / ног и т. Д. Сервоприводы требуют механизма обратной связи и вспомогательной схемы для управления позиционированием.
Шаговые двигатели:
Довольно медленное, точное вращение, простая установка и управление. Преимущество перед серводвигателями в позиционном управлении, где угол поворота не является ограничителем.Шаговые двигатели подходят для 3D-принтеров и аналогичных устройств, где положение является основным.
Шаговый двигатель против сервопривода: вердикт
Сервосистемы управления лучше всего подходят для высокоскоростных приложений с высоким крутящим моментом, которые связаны с динамическими изменениями нагрузки. Системы шагового управления менее дороги и оптимальны для приложений, требующих ускорения от низкого до среднего, высокого удерживающего момента и гибкости работы в разомкнутом или замкнутом контуре.
Система управления шаговым двигателем ZETLAB, модули управления
Аландские острова
Афганистан
Албания
Алжир
Американское Самоа
Андорра
Ангола
Ангилья
Антарктида
Антигуа и Барбуда
Австралия
Австралия
Австралия
Австралия Азербайджан
Багамы
Бахрейн
Бангладеш
Барбадос
Беларусь
Бельгия
Белиз
Бенин
Бермудские острова
Босния
Бутан
Болзивия
Британская территория в Индийском океане
Бруней-Даруссалам
Болгария
Буркина-Фасо
Бурунди
Камбоджа
Камерун
Канада
Кабо-Верде
Каймановы острова
Центральноафриканская Республика
Чад
Чили
Китай
Остров Рождества
Кокосовые острова (Килинг)
Колумбия
Коморские острова
Конго, Демократическая Республика (бывший Заир)
Коста-Конго, Республика
9000 Рика
Кот-д’Ивуар
Хорватия (местное название: Hrvatska)
Куба
Кипр
Чешская Республика
Дания
Джибути
Доминика
Доминиканская Республика
Экваториальная Гвинея
Эритрея
Эстония
Эфиопия
Фолклендские (Мальвинские) острова
Фарерские острова
Фиджи
Финляндия
Франция
Французская Гвиана
Французская Гвиана
9000 Французская Гвиана
Французская Гвиана
Гамбия
Грузия
Рост любая
Гана
Гибралтар
Греция
Гренландия
Гренада
Гваделупа
Гуам
Гватемала
Гвинея
Гвинея-Бисау 9000 9000 9000 Гайя-Бисау
Гвинея-Бисау
Гонконг
Венгрия
Исландия
Индия
Индонезия
Иран (Исламская Республика)
Ирак
Ирландия
Израиль
Италия
Ямайка
000 Япония
Иордания Япония
Ямайка
Кирибати
Корея, Народно-Демократическая Республика
Корея, Республика
Кувейт
Кыргызстан
Лаосская Народно-Демократическая Республика
Латвия
Ливан
Лесото
ahirtein
ahirtein
Арабская Джозия
ahiria
Литва
Люксембург
Макао
Македония, бывшая Югославская Республика
Мадагаскар
Малави
Малайзия
Мальдивы
Мали
Мальдивы
Мали
9000 Мавританские острова Мавритания
Мальта
9000 Мавританские острова
Майотта
Мексика
Микронезия, Федеративные Штаты
Молдова, Республика
Монако
Монголия
Монтсеррат
Марокко
Мозамбик
Марокко
0003
Намибия
Нидерланды
Намибия Антильские острова
Новая Каледония
Новая Зеландия
Никарагуа
Нигер
Нигерия
Ниуэ
Остров Норфолк
Северные Марианские острова
Норвегия
Пакистан
Норвегия
Пакистан
02 Палестинская территория, оккупированная
Панама
Папуа-Новая Гвинея
Парагвай
Перу
Филиппины
Питкэрн
Польша
Португалия
Пуэрто-Рико
Россия
Россия Руанда
Остров Святой Елены
Сент-Китс и Невис
Сент-Люсия
Сен-Пьер и Микелон
Сент-Винсент и Гренадины
Самоа
Сан-Марино
Саудовская Аравия
Саудовская Аравия
Саудовская Аравия
Саудовская Аравия
Сербия и Черногория
Сейшельские острова
Сьерра-Леоне
Сингапур
Словакия
Словения
Соломоновы Острова
Сомали
Южная Африка
Южная Грузия
Южная Джорджия Испания и Южные Сандвичевы острова
Суринам
Острова Шпицберген и Ян-Майен
Свазиленд
Швеция
Швейцария
Сирийская Арабская Республика
Тайвань
Таджикистан
Танзания, Объединенная Республика
Тогте
Таиланд
Тимор
Тонга
Тринидад и Тобаго
Тунис
Турция
Туркменистан
Острова Теркс и Кайкос
Тувалу
Уганда
Украина
00020003
Соединенные Штаты
Соединённые Штаты
Соединённые Штаты
Соединённые Штаты
Соединённые Штаты
Соединённые Штаты Америки
Внешние острова
Уругвай
Узбекистан
Вануату
Ватикан-государство (Святой Престол)
Венесуэла
Вьетнам
Виргинские острова (Британские)
Виргинские острова (U.