
Присоединительные размеры и габариты общепромышленных асинхронных электродвигателей с короткозамкнутым ротором производства ОАО «Могилевский завод «Электродвигатель». Электродвигатели асинхронные общепромышленные
исполнение IM208X (IM308X;IM218X;IM368X)
| Размеры, мм | АИР 56 | АИР 63 | АИР 71 | АИР 80А | АИР 80В, С | АИР 90 | АИР 100 S | АИР 100 L | АИР 112 | АИР 132 S | АИР 132М | АИР 160S | АИР 160М | АИР 180S | АИР 180М | ||||||||||||||
| 2 | 4, 6, 8 | 2 | 4, 6, 8 | 2 | 4, 6, 8 | 2 | 4, 6, 8 | ||||||||||||||||||||||
| L1 | 23 | 30 | 40 | 50 | 50 | 50 | 60 | 60 | 80 | 80 | 80 | 110 | |||||||||||||||||
| L10 | 71 | 80 | 90 | 100 | 100 | 125 | 112 | 140 | 140 | 140 | 178 | 178 | 210 | 203 | 241 | ||||||||||||||
| L17 | 5,8 | 7,0 | 7,0 | 10,0 | 10,0 | 10,0 | 12,0 | 12,0 | 12,0 | 12,0 | 12,0 | 15 | |||||||||||||||||
| L20 | IМ2081 IМ3081 | 3,0 | 3,5 | 3,5 | 3,5 | 3,5 | 4,0 | 4,0 | 4,0 | 4,0 | 5,0 | 5,0 | 5 | ||||||||||||||||
| IМ2181 IМ3681 | 2,5 | 2,5 | 3,0 | 2,5 | 3,0 | 3,0 | 3,5 | 3,0 | 3,5 | 3,0 | 3,5 | 3,5 | 3,5 | 3,5 | 3,5 | 4,0 | 3,5 | 4,0 | — | ||||||||||
| L21 | 10 | 10 | 10 | 10 | 10 | 12 | 14 | 14 | 15 | 19 | 19 | 13 | 15 | ||||||||||||||||
| L30 | 218 | 237 | 272,5 332* | 296,5 368* | 320,5 392* | 337 401* | 360 430* | 391 460* | 433 | 463 | 501 | 680 | 720 | 700 | 740 | ||||||||||||||
| L31 | 36 | 40 | 45 | 50 | 50 | 56 | 63 | 63 | 70 | 89 | 89 | 108 | 121 | ||||||||||||||||
| L33 | 234,0 | 263,0 | 316,5 | 350,0 | 374,0 | 390,0 | 424,0 | 455,0 | 516,0 | 546,0 | 584,0 | 785 | 815 | 804 | 844 | ||||||||||||||
| b1 | 4 | 5 | 6 | 6 | 6 | 8 | 8 | 8 | 10 | 10 | 10 | 12 | 14 | 12 | 14 | 14 | 16 | 14 | 16 | ||||||||||
| b2 | 12 | 14 | |||||||||||||||||||||||||||
| b10 | 90 | 100 | 112 | 125 | 125 | 140 | 160 | 160 | 190 | 216 | 216 | 254 | 279 | ||||||||||||||||
| b16 | 8,8 | 10 | 10 | 12 | 12 | 12 | 16 | 16 | 16 | 16 | 16 | 20 | |||||||||||||||||
| b30 | 127 | 142 | 160 | 180 | 180 | 198 | 226 | 226 | 250 | 287 | 287 | 350 | 375 | ||||||||||||||||
| b31 | 90 | 90 | 115 | — | 115 | — | 120 | — | — | — | — | — | — | — | — | ||||||||||||||
| h | 56 | 63 | 71 | 80 | 80 | 90 | 100 | 100 | 112 | 132 | 132 | 160 | 180 | ||||||||||||||||
| h2 | 4 | 5 | 6 | 6 | 6 | 7 | 7 | 7 | 8 | 8 | 8 | 8 | 9 | 8 | 9 | 9 | 10 | 9 | 10 | ||||||||||
| h3 | 8 | 9 | |||||||||||||||||||||||||||
| h5 | 12,5 | 16,0 | 21,5 | 24,5 | 24,5 | 27,0 | 31,0 | 31,0 | 35,0 | 41,0 | 41,0 | 45 | 51,5 | 45 | 51,5 | 51,5 | 59 | 51,5 | 59 | ||||||||||
| h6 | 45 | 51,5 | |||||||||||||||||||||||||||
| h20 | 7 | 8 | 8 | 9 | 9 | 10 | 12 | 12 | 14 | 16 | 16 | 20 | |||||||||||||||||
| h41 | 148 | 161 | 188 225* | 204,5 241,5* | 204,5 241,5* | 230,0 267* | 246,5 288* | 246,5 288* | 276 | 316 | 316 | 405 | 445 | ||||||||||||||||
| d1 | 11 | 14 | 19 | 22 | 22 | 24 | 28 | 28 | 32 | 38 | 38 | 42 | 48 | 42 | 48 | 48 | 55 | 48 | 55 | ||||||||||
| d2 | 42 | 48 | |||||||||||||||||||||||||||
| d20 | IМ2081 IМ3081 | 115 | 130 | 165 | 165 | 165 | 215 | 215 | 215 | 265 | 300 | 300 | 300 | 350 | |||||||||||||||
| IМ2181 IМ3681 | 65 | 85 | 75 | 100 | 85 | 115 | 100 | 130 | 100 | 130 | 115 | 130 | 130 | 130 | 130 | 165 | 165 | 215 | 165 | 215 | — | — | |||||||
| d22 | IМ2081 IМ3081 | 10 | 10 | 12 | 12 | 12 | 15 | 15 | 15 | 15 | 19 | 19 | 19 | ||||||||||||||||
| IМ2181 IМ3681 | М5 | М6 | М5 | М6 | М6 | M8 | М6 | M8 | М6 | M8 | М6 | М8 | М8 | М8 | М8 | М10 | М10 | М12 | М10 | М12 | — | ||||||||
| d24 | IМ2081 IМ3081 | 140 | 160 | 200 | 200 | 200 | 250 | 250 | 250 | 300 | 350 | 350 | 350 | 400 | |||||||||||||||
| IМ2181 IМ3681 | 80 | 99 | 90 | 110 | 105 | 140 | 120 | 160 | 120 | 160 | 140 | 164 | 160 | 160 | 156 | 211 | 200 | 248 | 200 | 248 | — | — | |||||||
| d25 | IМ2081 IМ3081 | 95 | 110 | 130 | 130 | 130 | 180 | 180 | 180 | 230 | 250 | 250 | 250 | 300 | |||||||||||||||
| IМ2181 IМ3681 | 50 | 70 | 60 | 80 | 70 | 95 | 80 | 110 | 80 | 110 | 95 | 110 | 110 | 110 | 110 | 130 | 130 | 180 | 130 | 180 | — | — | |||||||
Общие характеристики электродвигателей Могилевского завода «Электродвигатель»
Технические характеристики электродвигателей Могилевского завода «Электродвигатель»
В данном разделе представлены электродвигатели асинхронные общепромышленные российских производителей и производителей стран СНГ. Также вы можете посмотреть производителей асинхронных электродвигателей. В таблице указаны возможные размеры электродвигателя.
Также вы можете посмотреть производителей асинхронных электродвигателей. В таблице указаны возможные размеры электродвигателя.
Габаритные, установочные и присоединительные размеры электродвигателей. Особенности обозначений ГОСТ и МЭК (IEC)
Габаритные, установочные и присоединительные размеры электродвигателей. Особенности обозначений ГОСТ и МЭК (IEC)
Для российских компаний в последнее время актуален вопрос импортозамещения. И часто перед закупщиком оборудования стоит задача подобрать электродвигатель на замену импортному по техническим характеристикам, не привязываясь к определенному бренду. Один из важнейших параметров в таком случае — габаритные, установочные и присоединительные размеры электрической машины. Обозначения габаритных размеров электродвигателей по стандартам IEC (МЭК) и ГОСТ отличаются и могут ввести в заблуждение даже опытного технического специалиста. Как же правильно выбрать подходящую модель?
Следует обратить внимание, что габаритные значения по стандартам Международной Электротехнической Комиссии (IEC) состоят только из заглавных латинских букв, например, L, EA. Обозначения габаритов по ГОСТ пишутся строчными латинскими буквами и цифрами, например, l33, h6.
Обозначения габаритов по ГОСТ пишутся строчными латинскими буквами и цифрами, например, l33, h6.
Рассмотрим наглядно, как выглядят обозначения одного и того же параметра на схеме электродвигателя 5АМХ.
Схема двигателя 5АМХ
Соответствие маркировок габаритных, установочных и присоединительных размеров по разным стандартам можно увидеть в таблице ниже, которая позволяет легко ориентироваться сразу в обеих системах обозначений. Это значительно упрощает подбор электродвигателя по заданным параметрам.
| СТАНДАРТ | Габаритные размеры | |||||
|---|---|---|---|---|---|---|
| ГОСТ | l30 | l33 | b31 | h41 | d24 | d30 |
| МЭК (IEC) | L | LC | AD | HD | P | AC |
| СТАНДАРТ | Установочные и присоединительные размеры | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| ГОСТ | l1 | l2 | l10 | l11 | l20 | l21 | l31 | l39 | b1 |
| МЭК (IEC) | E | EA | B | BB | T | LA | C | R | F |
| СТАНДАРТ | Установочные и присоединительные размеры | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| ГОСТ | b2 | b10 | b11 | b12 | h | h2 | h3 | h5 | h6 |
| МЭК (IEC) | FA | A | AB | AA | H | GD | GF | GA | GC |
| СТАНДАРТ | Установочные и присоединительные размеры | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| ГОСТ | h20 | d1 | d2 | d10 | d20 | d22 | d25 | 45* | 22,5* |
| МЭК (IEC) | HA | D | DA | K | M | S | N | 45* | 22,5* |
Серии MAF — DPF — MAP — Чертежи
Продажа электродвигателей (электромоторов): асинхронный электродвигатель, однофазные, трехфазные электродвигатели, общепромышленные, электродвигатель специального назначения, многоскоростные электромоторы, со встроенным электромагнитным тормозом, с принудительным охлаждением, Serie M — DP — MM — MMK — Чертежи — таблицы размеров:
Мощность от 0,09 до 90 кВт
Габаритные размеры от 56 до 280
Электродвигатели асинхронные — электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.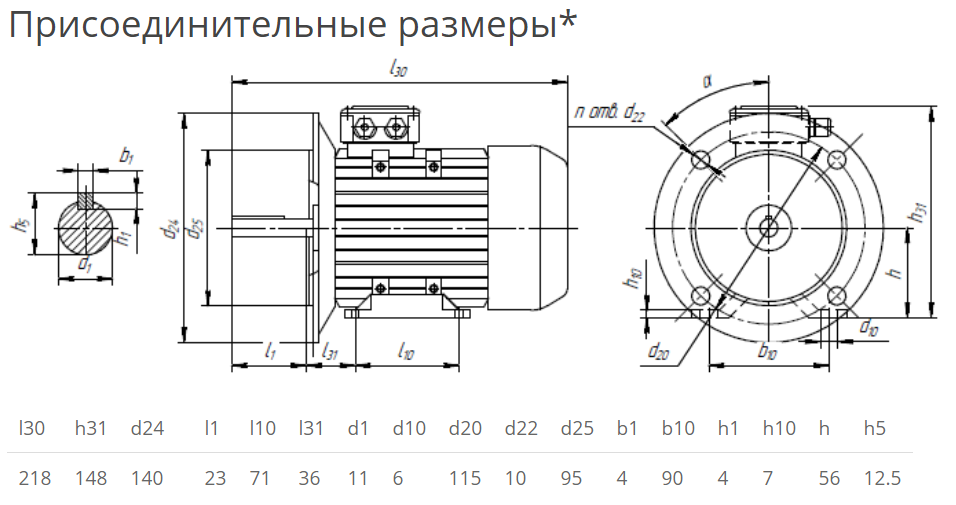 Второе название асинхронных двигателей — индукционные, это обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора. Serie MAF — DPF — MAP — Чертежи и таблицы размеров B14 (фланец), В34 (фланец + лапы) — Электродвигатели , Асинхронные машины сегодня составляют большую часть электрических машин, применяясь главным образом в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, в подавляющем большинстве это асинхронные двигатели с короткозамкнутым ротором (АДКЗ). Серии MAF — DPF — MAP — Чертежи — размеры B14, В34 (фланец + лапы), Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что магнитное поле. Частота вращения ротора всегда немного меньше частоты вращения магнитного поля, т.к. при равенстве скоростей поле перестанет наводить в роторе ток, и на ротор перестанет действовать сила Ампера.
Второе название асинхронных двигателей — индукционные, это обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора. Serie MAF — DPF — MAP — Чертежи и таблицы размеров B14 (фланец), В34 (фланец + лапы) — Электродвигатели , Асинхронные машины сегодня составляют большую часть электрических машин, применяясь главным образом в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, в подавляющем большинстве это асинхронные двигатели с короткозамкнутым ротором (АДКЗ). Серии MAF — DPF — MAP — Чертежи — размеры B14, В34 (фланец + лапы), Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что магнитное поле. Частота вращения ротора всегда немного меньше частоты вращения магнитного поля, т.к. при равенстве скоростей поле перестанет наводить в роторе ток, и на ротор перестанет действовать сила Ампера. Серии MAF — DPF — MAP — Чертежи — размеры B14, В34 (фланец + лапы). Отсюда и название — асинхронный двигатель (в отличие от синхронного, частота вращения которого совпадает с частотой магнитного поля). Относительная разность скоростей вращения ротора, частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности
Серии MAF — DPF — MAP — Чертежи — размеры B14, В34 (фланец + лапы). Отсюда и название — асинхронный двигатель (в отличие от синхронного, частота вращения которого совпадает с частотой магнитного поля). Относительная разность скоростей вращения ротора, частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности
Серии MAF — DPF — MAP — Чертежи — размеры B14, В34 (фланец + лапы)
Чертежи и таблицы размеров В14 (фланец), В34 (фланец + лапы)
|
Электродвигатели асинхронные — Габаритные — Энциклопедия по машиностроению XXL
Электродвигатель (асинхронный, с коротко- Габаритные размеры ма-замкнутым ротором) шины в мм
[c. 19]
19]
Электродвигатель (асинхронный, с ко- Габаритные размеры шуруповерта в мм [c.50]
В электрической передаче переменного тока используют в качестве тягового генератора синхронный генератор, а в качестве тяговых электродвигателей — асинхронные короткозамкнутые двигатели. Такие двигатели при одинаковых параметрах с двигателями постоянного тока имеют меньшие габаритные размеры, в 1,2— [c.6]
Электродвигатели МТ — Г абаритные размеры 229 — МТК — Габаритные размеры 233 — Техническая характеристика 235 —асинхронные 222 — Габаритные размеры 224, 225 — Мошность — Снижение 226
[c.603]
На фиг. 24 приведен габаритный эскиз асинхронного электродвигателя с короткозамкнутым ротором серии А, а в табл. 11, Па н 12 — технические данные и габаритные размеры. Размеры относятся к защищенным электродвигателям в чугунной оболочке горизонтального исполнения на лапах (форма Ш,2).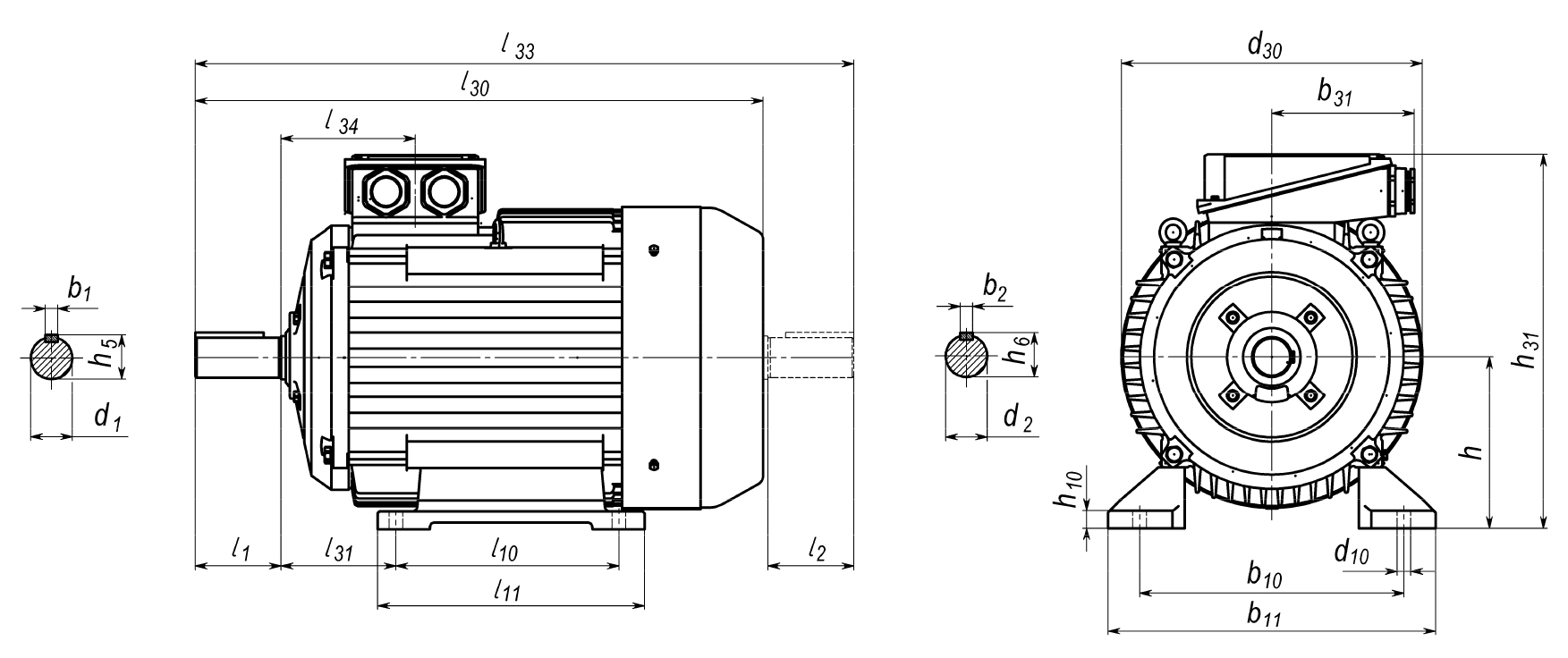 Следует заметить, что основные монтажные размеры С, С2 н h сохраняются для всех двигателей горизонтального исполнения на лапах.
[c.396]
Следует заметить, что основные монтажные размеры С, С2 н h сохраняются для всех двигателей горизонтального исполнения на лапах.
[c.396]
Габаритные размеры крановых асинхронных электродвигателей с фазовым ротором серий МТ и МТВ (в мм) [c.343]
Электрическое оборудование. Крановые электродвигатели переменного тока. Асинхронные двигатели, их основные части и детали, мощность и габаритные размеры, пуск в ход, регулирование скорости вращения, реверсирование и торможение. [c.508]
Основные технические данные, габаритные и присоединительные размеры и массы асинхронных электродвигателей единой серии указаны в табл. 11—34. Принятые в этих таблицах буквенные обозначения соответствуют установленным в ГОСТ 4541-48 и пояснены в табл. 8 и на фиг. 9—13. [c.293]
Для подвесного рельсового транспорта асинхронный электродвигатель особенно ценен тем, что его масса и габаритные размеры по сравнению с другими электродвигателями невелики, а отсутствие коллектора или контактных колец уменьшает эксплуатационные расходы и повышает надежность работы. Двигатель способен работать в тяговом и генераторных режимах и в границах допускаемой тепловой нагрузки может работать во всех четырех квадрантах его характеристики (тяга, рекуперативное торможение, торможение при вращении в обратном направлении и тяга при движении в обратном направлении). Недостатком двигателя является большой пусковой ток, что ограничивает число включений в 1 ч при обычных схемах управления. Синхронная частота вращения двухполюсной машины при питании от сети промышленной частоты тока 50 Гц достигает 3000 6б/мин. На рис. 2.8, а показана скоростная характеристика трехфазного асинхронного электродвигателя с короткозамкнутым ротором, имеющего повышенное скольжение, а на рис. 2.8, б — кривая для определения его мощности N при разных режимах работы ПВ, %.
[c.24]
Двигатель способен работать в тяговом и генераторных режимах и в границах допускаемой тепловой нагрузки может работать во всех четырех квадрантах его характеристики (тяга, рекуперативное торможение, торможение при вращении в обратном направлении и тяга при движении в обратном направлении). Недостатком двигателя является большой пусковой ток, что ограничивает число включений в 1 ч при обычных схемах управления. Синхронная частота вращения двухполюсной машины при питании от сети промышленной частоты тока 50 Гц достигает 3000 6б/мин. На рис. 2.8, а показана скоростная характеристика трехфазного асинхронного электродвигателя с короткозамкнутым ротором, имеющего повышенное скольжение, а на рис. 2.8, б — кривая для определения его мощности N при разных режимах работы ПВ, %.
[c.24]
Габаритные размеры, мм длина ширина высота Мощность асинхронного электродвигателя, кВт Масса, кг
[c.62]
Асинхронные короткозамкнутые электродвигатели очень просты по конструкции они обладают высокой надежностью в эксплуатации, низкой стоимостью изготовления и ремонта меньшими габаритными размерами и массой по сравнению с электродвигателями постоянного тока, не требуют особого ухода, кроме наблюдения за подшипниками, изоляцией, контактными соединениями, и имеют удовлетворительные тяговые свойства. При повышении частоты врашения ротора выше синхронной (частоты вращения магнитного поля) автоматически переходят в генераторный режим без каких-либо переключений, что упрощает электрическую схему при использовании электрического торможения.
[c.74]
При повышении частоты врашения ротора выше синхронной (частоты вращения магнитного поля) автоматически переходят в генераторный режим без каких-либо переключений, что упрощает электрическую схему при использовании электрического торможения.
[c.74]
Трудность применения асинхронных двигателей для условий тяги заключается в том, что они имеют так называемую жесткую характеристику, т. е. частота вращения ротора при постоянных напряжении и частоте питающего тока почти постоянна при изменении нагрузки. Регулирование частоты вращения ротора асинхронных электродвигателей возможно изменением числа полюсов и частоты источника питания, а также изменением подводимого напряжения. Изменение числа полюсов дает ступенчатое регулирование скорости в сравнительно небольщих пределах, увеличивает габаритные размеры, массу и стоимость электрических двигателей. Несмотря на это, ведутся работы по регулированию скорости путем переключения числа полюсов как у тягового генератора, так и у электродвигателей.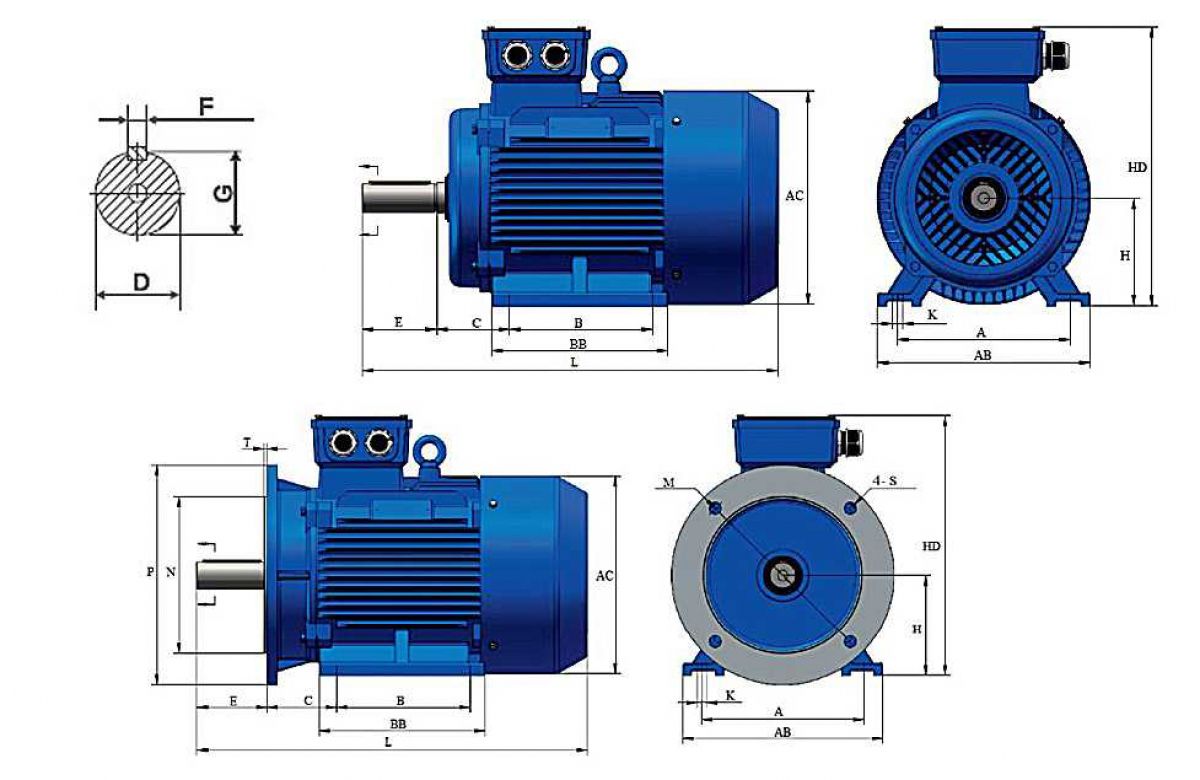 Регулирование частоты питающего тока машии переменного тока, приводимых во вращение от дизеля, вызывает затруднения, так как тепловозные дизели при определенной мощности работают с постоянной частотой вращения вала. В этом случае необходимо иметь промежуточные машины, рассчитанные на полную мощность дизеля, что экономически невыгодно, а практически невозможно разместить их на тепловозе. Развитие полупроводниковой техники позволило создать сравнительно компактную и легкую передачу мощности на пере.менном токе.
[c.286]
Регулирование частоты питающего тока машии переменного тока, приводимых во вращение от дизеля, вызывает затруднения, так как тепловозные дизели при определенной мощности работают с постоянной частотой вращения вала. В этом случае необходимо иметь промежуточные машины, рассчитанные на полную мощность дизеля, что экономически невыгодно, а практически невозможно разместить их на тепловозе. Развитие полупроводниковой техники позволило создать сравнительно компактную и легкую передачу мощности на пере.менном токе.
[c.286]
Справочные данные по асинхронным электродвигателям. В табл. 4 приведен габаритный эскиз асинхронного электродвигателя с коротко замкнутым ротором серии А, а в табл. 42—44 — технические данные габаритные размеры. Размеры относятся к защищенным электродвига телям в чугунной оболочке горизонтального исполнения на лапа (форма Щ2). Основные монтажные размеры С, С3 и Л сохраняются дл всех двигателей горизонтального исполнения на лапах.
[c. 224]
224]
Выпускаются также асинхронные электродвигатели с фазным (эскиз в табл. 46) и короткозамкнутым ротором (см. эскиз в табл. 48), предназначенные для повторно-кратковременного режима работы (крановые и металлургические). В табл. 48 и 49 приведены их основные габаритные размеры и технические данные. [c.226]
Для работы на морских судах и в народном хозяйстве применяются асинхронные короткозамкнутые электродвигатели с повышенным скольжением серии МАП 120—720 с тормозами серии ТМТ 12—72 и без тормозов. Двигатели мощностью от 1,2 до 85 кВт выпускаются односкоростными с синхронной частотой вращения 1000 и 1500 об/мин двухскоростными и трехскоростными — для кратковременного и повторнократковременного режимов работы двухскоростными — для кратковременного режима работы, допускающими стоянку под током короткого замыкания одно-, двух- и трехскоростными — для работы в системах частотного регулирования (табл. II. 1.21). Структура условного обозначения MAnXi2Xa—Х3/Х3/Х3Х4Х5 М — машина А — асинхронная П — повышенного скольжения Xi -г- условный габаритный размер по диаметру статора (1, 2, 4, 5, 6 или 7) 2 — порядковый номер серии Хг — условный габаритный размер по длине статора на одном диаметре (1 или 2) Хд — число полюсов (одно-, двух-или трехскоростной двигатель) Х4 — климатическое исполнение Xft — категория размещения. Характеристики двигателя приведены в ТУ 16—513.334—77 Электродвигатели асинхронные серии МАП 120—720 с тормозами серии ТМТ 12—72 .
[c.249]
Характеристики двигателя приведены в ТУ 16—513.334—77 Электродвигатели асинхронные серии МАП 120—720 с тормозами серии ТМТ 12—72 .
[c.249]
Электродвигатель (асинхронный, с ко- Габаритные размеры гайковерта в мм роткозамкнутым ротором)
[c.73]
В качестве привода ЦВН используются вертикальные асинхронные электродвигатели ВДА 173/99-6-АХУЛ4 (рис. 2.10). Мощность электродвигателя равна 5600 кВт при частоте вращения 1000 об/мин, напряжение сети 600 В, масса электродвигателя 33,5 т, габаритный размер в плане 3000 мм, высота 4200 мм. Заводом-изготовителем электродвигатели поставляются обкатанными на холостом ходу в двух исполнениях — с охлаждением пресной водой или морской. После сборки на объекте электродвигатели повторно должны проходить обкатку и добалан-сировку. [c.38]
К механизмам непрерывного транспорта относят элеваторы, конвейеры, эскалаторы и тому подобные меха-мизмы. Все они работают в основном в продолжительном или перемежающемся режимах работы. Электрооборудование этих механизмов состоит из электродвигателей, аппаратуры управления, защиты и блокировочных устройств. Чаще всего в приводах использованы асинхронные электродвигатели или специальные электродвигатели-ролики (электродвигатели-шкивы), корпус которых выполнен вращающимися и является для конвейерной линии ведущим, а роторная часть — неподвижной. Двигатели-шкивы позволяют уменьшить габаритные размеры конвейера, а в некоторых случаях, когда линия состоит из одних двигателей-роликов, совместить ме-хаиизм с электродвигателем в одиночный электропривод.
[c.161]
Все они работают в основном в продолжительном или перемежающемся режимах работы. Электрооборудование этих механизмов состоит из электродвигателей, аппаратуры управления, защиты и блокировочных устройств. Чаще всего в приводах использованы асинхронные электродвигатели или специальные электродвигатели-ролики (электродвигатели-шкивы), корпус которых выполнен вращающимися и является для конвейерной линии ведущим, а роторная часть — неподвижной. Двигатели-шкивы позволяют уменьшить габаритные размеры конвейера, а в некоторых случаях, когда линия состоит из одних двигателей-роликов, совместить ме-хаиизм с электродвигателем в одиночный электропривод.
[c.161]
ДИТСЯ асинхронным короткозамкнутым электродвигателем, установленным на общей фундаментной плите. Плита агрегата и сам агрегат в отношении балансировки выполнены с учетом того обстоятельства, что установка агрегата производится без крепления плиты. Агрегаты на 1000 об/мин устанавливаются на резиновых амортизаторах. Общий вид с габаритными и установочными размерами агрегата с ЭМУ50 на 1000 об/мин дан на фиг. 205. На фиг. 206 приведены кривые намагничивание и внешние характеристики одной из машин ЭМУ50-1000.
[c.397]
Общий вид с габаритными и установочными размерами агрегата с ЭМУ50 на 1000 об/мин дан на фиг. 205. На фиг. 206 приведены кривые намагничивание и внешние характеристики одной из машин ЭМУ50-1000.
[c.397]
Для перегрузочных устройств применяют групповой или индивидуальный электропривод. При групповом приводе перемещения всех рабочих органов (например, горизонтальное и вертикальное перемещения и поворот захвата) выполняются от одного электродвигателя. Индивидуальный привод оснащен для каждогол1еханизма отдельным электродвигателем. Для перегрузочных устройств, как правило, применяют электропривод с асинхронными двигателями переменного тока, которые по сравнению с двигателями постоянного тока и синхронными имеют ряд преимуществ простота обслуживания, большая надежность в эксплуатации, меньшая стоимость двигателя и аппаратуры управления, меньшая масса и габаритные размеры. [c.164]
В подвесных дорогах легчайшего типа в качестве тяговых и подъемных электродвигателей применяют асинхронные электродвигатели однофазного переменного тока промышленной частоты с пониженным напряжением 24—36 В. Все показатели однофазных двигателей — масса, габаритные размеры, КПД и другие параметры — хуже, чем у электродвигателей трехфазного тока. Относительная масса однофазных электродвигателей в диапазоне мощностей от 0,27 до 1 кВт составляет 25—30 кг/кВт при 1500— 3000 об/мин и их применение ограничивается только малыми мощностями, когда более важным показателем для подвесной
[c.27]
Все показатели однофазных двигателей — масса, габаритные размеры, КПД и другие параметры — хуже, чем у электродвигателей трехфазного тока. Относительная масса однофазных электродвигателей в диапазоне мощностей от 0,27 до 1 кВт составляет 25—30 кг/кВт при 1500— 3000 об/мин и их применение ограничивается только малыми мощностями, когда более важным показателем для подвесной
[c.27]
Приводной ролик вращается от электродвигателя через редуктор и систему шестерен, снижающих число оборотов. Для изменения числа оборотов приводного ролика (скорости шовной сварки) применяют электродвигатель постоянного тока с соответствующей системой регулирования (электромащинный и- тиристорные приводы) или асинхронный двигатель с магнитной муфтой скольжения, которая обеспечивает регулирование скорости сварки в диапазоне до 1 10, имеет небольшие габаритные размеры и надежна в эксплуатации. [c.50]
Кодировка размеров и мощностей асинхронных электродвигателей по NEMA и IEC. Сопоставимые ряды
В Таблице 1. (ниже) приведены перекрестные сочетания наиболее похожих механических параметров, все размеры в миллиметрах во избежание дополнительной путаницы. ( IEC — метрический стандарт, NEMA — дюймовый). Заметим, что, хотя размеры и не идентичны, они довольно близки. Наибольшие расхождения, как Вы увидите сами, находятся в ряду NEMA «N — W » ( IEC » E «) — это размер выступающей части вала электродвигателя. В большинстве случаев NEMA специфицирует намного больший по отношению к IEC размер.
Киловатты и лошадиные силы.
Индексы присоединительных и габаритных размеров электродвигателей NEMA (размеры — см. чертеж и таблицу ниже) . Буква до цифры ничего стандартного не обозначает. Это буква от производителя мотора, и у него и следует узнавать, что она обозначает.
Что такое IM code ? Индексы присоединительных и габаритных размеров электродвигателей IEC (размеры — см. чертеж и таблицу ниже) .
! Если электродвигатель даже не будет установлен на раму, то размер высоты от центра основания до центра вала указывается так, как если бы рама была.
Таблица 1. Сравнение похожих присоединительных и габаритных размеров IEC и NEMA
Соотношение габариты/ мощность в IEC и NEMA хорошо совпадают в начале таблицы, но в больших размерах они отличаются настолько, что вызывают сомнения в возможности применения одного из стандартов. Посмотрим соотношение IEC 115 S / NEMA 364 T для 4-х полюсных электродвигателей. NEMA декларирует 75 л .с. для того же присоединительного размера рамы, где IEC декларирует 50 л .с. Если 50 л.с. достаточно то Вы, конечно, могли бы взять и раму согласно NEMA 326 T, но как быть с присоединительными размерами? Если же взять нужную раму (364 T) то следует подумать, не повредит ли слишком мощный мотор приводной механизм, или даже нагрузку.
Стандарты размеров электродвигателей: IEC 60034 – Номиналы и рабочие характеристики и все с этим связанное (испытания, размеры габаритные, конструкции…
| |||||||||||
 Сопоставимые ряды.
Сопоставимые ряды. IEC размер 56 это скорее «дополнительный/переходный» размер, в то время, как NEMA размер 56 исключительно популярен, покрывая диапазон мощностей от ¼ до 1,5 л.с (0,37-1 КВт).
IEC размер 56 это скорее «дополнительный/переходный» размер, в то время, как NEMA размер 56 исключительно популярен, покрывая диапазон мощностей от ¼ до 1,5 л.с (0,37-1 КВт).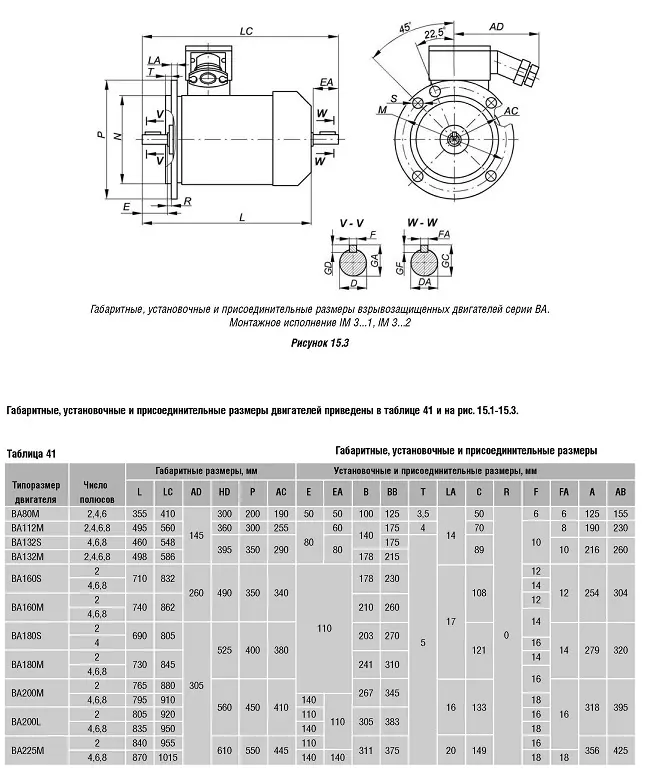 Поэтому, идея использования кВт в качестве единицы мехянической мощности для них неожиданна. Европейцы в киловатт-часах о работе думают легко.
Поэтому, идея использования кВт в качестве единицы мехянической мощности для них неожиданна. Европейцы в киловатт-часах о работе думают легко. Например, электродвигатель 56 H имеет на раме и присоединительные отверстия по NEMA 56 и NEMA 143-5 T и стандартный шток NEMA 56.
Например, электродвигатель 56 H имеет на раме и присоединительные отверстия по NEMA 56 и NEMA 143-5 T и стандартный шток NEMA 56. «
«
 с.
с. с.
с.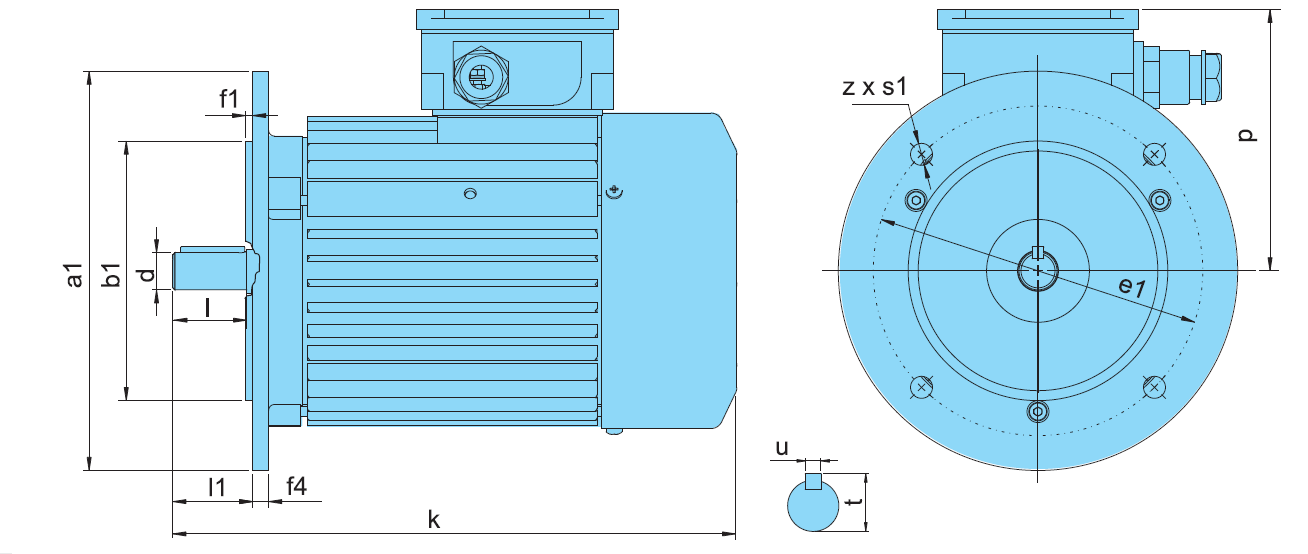

Размеры электродвигателей — Завод Нодвиг
Габаритные, установочные и присоединительные размеры двигателей
c привязкой мощности к установочным и присоединительным размерам по I варианту
| Тип двигателя | |||||||
| Размеры, мм | STg65-2i STg65-4i STg65-6i SEg65-2i SEg65-4i | STg71-2А STg71-4A SEg71-2А SEg71-4A | STg71-2B STg71-4B SEg71-2B SEg71-4B STg71-6A STg71-6B STg71-2A IE3 | STg80-2C STg80-4C SЕg80-2C SEg80-4C STg71-6C | STg80-2D STg80-4D SЕg80-2D | ||
| L1 | 30 | 40 | 40 | 50 | 50 | ||
| L10 | 111 | 90 | 90 | 100 | 100 | ||
| L17 | — | 7 | 7 | 10 | 10 | ||
| L20 | IM2081 IM3081 | 3. 5 5 | 3.5 | 3.5 | 3.5 | 3,5 | |
| IM2181 IM3681 | 2.5 3 | 2.5 3 | 2,5 3 | 3,0 3,5 | 3,0 3,5 | ||
| L30 | 235 | 258 | 278 | 314 | 333 | ||
| L31 | 26 | 45 | 45 | 50 | 50 | ||
| L39 | 0 | 0 | 0 | 0 | 0 | ||
| b1 | 5 | 6 | 6 | 6 | 6 | ||
| b10 | — | 112 | 112 | 125 | 125 | ||
| b16 | — | 7 | 7 | 12 | 12 | ||
| h | 65 | 71 | 71 | 80 | 80 | ||
| h2 | 5 | 6 | 6 | 6 | 6 | ||
| h5 | 16 | 21,5 | 21,5 | 24,5 | 24,5 | ||
| h20 | — | 6 | 6 | 10 | 10 | ||
| h41 | 172 | 178 | 178 | 187 | 187 | ||
| d1 | 14 | 19 | 19 | 22 | 22 | ||
| b31** | 35 | 45 | 45 | 45 | 45 | ||
| d20 | IM2081 IM3081 | 165 | 165 | 165 | 165 | 165 | |
| IM2181 IM3681 | 85 | 85 | 85 | 100 | 100 | ||
| 100 | 115 | 115 | 130 | 130 | |||
| d22 | IM2081 IM3081 | 12 | 12 | 12 | 12 | 12 | |
| IM2181 IM3681 | М6 | М6 | М6 | М6 | М6 | ||
| М6 | М8 | М8 | М8 | М8 | |||
| d24 | IM2081 IM3081 | 200 | 200 | 200 | 200 | 200 | |
| IM2181 IM3681 | 120 | 120 | 120 | 120 | 120 | ||
| 120 | 140 | 140 | 160 | 160 | |||
| d25 | IM2081 IM3081 | 130 | 130 | 130 | 130 | 130 | |
| IM2181 IM3681 | 70 | 70 | 70 | 80 | 80 | ||
| 80 | 95 | 95 | 110 | 110 | |||
Скачать руководство по эксплуатации
Габаритные, установочные и присоединительные размеры двигателей
c привязкой мощности к установочным и присоединительным размерам по II варианту
| Тип двигателя | |||||||
| Размеры, мм | STg71-2i STg71-4i STg71-6i | STg80-2А STg80-4A SEg80-2А SEg80-4A SEg80-2i SEg80-4i | STg80-2B STg80-4B STg80-6A STg80-6B SEg80-2B SEg80-4B STg80-2A IE3 | STg90-2C STg90-4C SЕg90-2C SEg90-4C STg90-6C | STg90-2D STg90-4D SЕg90-2D | ||
| L1 | 40 | 40 | 40 | 50 | 50 | ||
| L10 | 90 | 100 | 100 | 100/125 | 100/125 | ||
| L17 | 7 | 10 | 10 | 10 | 10 | ||
| L20 | IM2081 IM3081 | 3. 5 5 | 3.5 | 3.5 | 3.5 | 3,5 | |
| IM2181 IM3681 | 2.5 3 | 3 3,5 | 3 3,5 | 3,0 3,5 | 3,0 3,5 | ||
| L30 | 258 | 258 | 278 | 314 | 333 | ||
| L31 | 45 | 50 | 50 | 56 | 56 | ||
| L39 | 0 | 0 | 0 | 0 | 0 | ||
| b1 | 6 | 6 | 6 | 8 | 8 | ||
| b10 | 112 | 125 | 125 | 140 | 140 | ||
| b16 | 7 | 12 | 12 | 12 | 12 | ||
| h | 71 | 80 | 80 | 90 | 90 | ||
| h2 | 6 | 6 | 6 | 7 | 7 | ||
| h5 | 21,5 | 21,5 | 21,5 | 27 | 27 | ||
| h20 | 6 | 10 | 10 | 10 | 10 | ||
| h41 | 178 | 187 | 187 | 197 | 197 | ||
| d1 | 19 | 19 | 19 | 24 | 24 | ||
| b31** | 45 | 45 | 45 | 45 | |||
| d20 | IM2081 IM3081 | — | 165 | 165 | 165 | 165 | |
| IM2181 IM3681 | 85 | 100 | 100 | 115 | 115 | ||
| 115 | 130 | 130 | 130 | 130 | |||
| d22 | IM2081 IM3081 | — | 12 | 12 | 12 | 12 | |
| IM2181 IM3681 | М6 | М6 | М6 | М8 | М8 | ||
| М8 | М8 | М8 | М8 | М8 | |||
| d24 | IM2081 IM3081 | — | 200 | 200 | 200 | 200 | |
| IM2181 IM3681 | 120 | 120 | 120 | 140 | 140 | ||
| 140 | 160 | 160 | 160 | 160 | |||
| d25 | IM2081 IM3081 | — | 130 | 130 | 130 | 130 | |
| IM2181 IM3681 | 70 | 80 | 80 | 95 | 95 | ||
| 95 | 110 | 110 | 110 | 110 | |||
Скачать руководство по эксплуатации
Страница не найдена – НВП «НКЕМЗ» завод производитель электродвигателей основан в 1955
Страна * :
— Выберите -АвстралияАвстрияАзербайджанАландские островаАлбанияАлжирАмериканское СамоаАнгильяАнголаАндорраАнтарктидаАнтигуа и БарбудаАргентинаАрменияАрубаАфганистанБагамские островаБангладешБарбадосБахрейнБеларусьБелизБельгияБенинБермудыБолгарияБоливияБонэйр, Синт-Эстатиус и СабаБосния и ГерцеговинаБотсванаБразилияБританская терр. в Индийском океанеБританские Виргинские островаБрунейБуркина ФасоБурундиБутанВануатуВатиканВеликобританияВенгрияВенесуэлаВиргинские Острова СШАВнешние малые острова СШАВосточный ТиморВьетнамГабонГаитиГайанаГамбияГанаГваделупаГватемалаГвинеяГвинея-БисауГерманияГернсиГибралтарГондурасГонконгГренадаГренландияГрецияГрузияГуамДанияДемократическая Республика КонгоДжерсиДжибутиДоминикаДоминиканская республикаЕгипетЗамбияЗимбабвеИзраильИндияИндонезияИорданияИракИранИрландияИсландияИспанияИталияЙеменКабо-ВердеКазахстанКаймановы островаКамбоджаКамерунКанадаКатарКенияКипрКирибатиКитайКокосовые островаКолумбияКоморские островаКонгоКосовоКоста-РикаКот-д’ИвуарКубаКувейтКыргызстанКюрасаоЛаосЛатвияЛесотоЛиберияЛиванЛивияЛитваЛихтенштейнЛюксембургМаврикийМавританияМадагаскарМайоттаМакаоМакедонияМалавиМалайзияМалиМальдивские островаМальтаМароккоМартиникаМаршалловы островаМексикаМикронезияМозамбикМолдоваМонакоМонголияМонтсерратМьянмаНамибияНауруНепалНигерНигерияНидерландыНикарагуаНиуэНовая ЗеландияНовая КаледонияНорвегияНорфолкОАЭОманОстров МэнОстров РождестваОстров Святой ЕленыОстрова КукаПакистанПалауПалестинаПанамаПапуа Новая ГвинеяПарагвайПеруПиткэрнПольшаПортугалияПуэрто-РикоРеюньонРоссияРуандаРумынияСальвадорСамоаСан-МариноСан-Томе и ПринсипиСаудовская АравияСвазилендСвальбард и Ян-МайенСвятая ЛюсияСеверная КореяСеверные Марианские островаСейшеллыСен-БартелемиСен-МартенСен-Пьер и МикелонСенегалСент-Винсент и ГренадиныСент-Китс и НевисСербияСингапурСинт-МартенСирияСловакияСловенияСоломоновы островаСомалиСуданСуринамСШАСьерра-ЛеонеТаджикистанТаиландТайваньТанзанияТогоТокелауТонгаТринидад и ТобагоТувалуТунисТуркменистанТуркс и КейкосТурцияУгандаУзбекистанУкраинаУоллис и ФутунаУругвайФарерские островаФиджиФилиппиныФинляндияФолклендские островаФранцияФранцузская ГвинеяФранцузская ПолинезияФранцузские Юж.
в Индийском океанеБританские Виргинские островаБрунейБуркина ФасоБурундиБутанВануатуВатиканВеликобританияВенгрияВенесуэлаВиргинские Острова СШАВнешние малые острова СШАВосточный ТиморВьетнамГабонГаитиГайанаГамбияГанаГваделупаГватемалаГвинеяГвинея-БисауГерманияГернсиГибралтарГондурасГонконгГренадаГренландияГрецияГрузияГуамДанияДемократическая Республика КонгоДжерсиДжибутиДоминикаДоминиканская республикаЕгипетЗамбияЗимбабвеИзраильИндияИндонезияИорданияИракИранИрландияИсландияИспанияИталияЙеменКабо-ВердеКазахстанКаймановы островаКамбоджаКамерунКанадаКатарКенияКипрКирибатиКитайКокосовые островаКолумбияКоморские островаКонгоКосовоКоста-РикаКот-д’ИвуарКубаКувейтКыргызстанКюрасаоЛаосЛатвияЛесотоЛиберияЛиванЛивияЛитваЛихтенштейнЛюксембургМаврикийМавританияМадагаскарМайоттаМакаоМакедонияМалавиМалайзияМалиМальдивские островаМальтаМароккоМартиникаМаршалловы островаМексикаМикронезияМозамбикМолдоваМонакоМонголияМонтсерратМьянмаНамибияНауруНепалНигерНигерияНидерландыНикарагуаНиуэНовая ЗеландияНовая КаледонияНорвегияНорфолкОАЭОманОстров МэнОстров РождестваОстров Святой ЕленыОстрова КукаПакистанПалауПалестинаПанамаПапуа Новая ГвинеяПарагвайПеруПиткэрнПольшаПортугалияПуэрто-РикоРеюньонРоссияРуандаРумынияСальвадорСамоаСан-МариноСан-Томе и ПринсипиСаудовская АравияСвазилендСвальбард и Ян-МайенСвятая ЛюсияСеверная КореяСеверные Марианские островаСейшеллыСен-БартелемиСен-МартенСен-Пьер и МикелонСенегалСент-Винсент и ГренадиныСент-Китс и НевисСербияСингапурСинт-МартенСирияСловакияСловенияСоломоновы островаСомалиСуданСуринамСШАСьерра-ЛеонеТаджикистанТаиландТайваньТанзанияТогоТокелауТонгаТринидад и ТобагоТувалуТунисТуркменистанТуркс и КейкосТурцияУгандаУзбекистанУкраинаУоллис и ФутунаУругвайФарерские островаФиджиФилиппиныФинляндияФолклендские островаФранцияФранцузская ГвинеяФранцузская ПолинезияФранцузские Юж. и Антаркт. терр.ХорватияЦентрально-Африканская РеспубликаЧадЧерногорияЧехияЧилиШвейцарияШвецияШри-ЛанкаЭквадорЭкваториальная ГвинеяЭритреяЭстонияЭфиопияЮАРЮж. Георгия и Юж. Сандвичевы о-ваЮжная КореяЮжный СуданЯмайкаЯпония
и Антаркт. терр.ХорватияЦентрально-Африканская РеспубликаЧадЧерногорияЧехияЧилиШвейцарияШвецияШри-ЛанкаЭквадорЭкваториальная ГвинеяЭритреяЭстонияЭфиопияЮАРЮж. Георгия и Юж. Сандвичевы о-ваЮжная КореяЮжный СуданЯмайкаЯпония
IE3 Асинхронный электродвигатель, асинхронный двигатель
1. ПРОДУКТ
ВВЕДЕНИЕ IE3 ЭЛЕКТРОДВИГАТЕЛЬ
YE3
Серия представляет собой 3-фазные асинхронные электродвигатели с полностью закрытым охлаждением вентилятора, двигатели переменного тока, промышленные двигатели. Премия
Эффективные двигатели разрабатываются нами самостоятельно в соответствии с
стандартный IEC, ГБ и т. д. Энергосберегающие двигатели соответствуют классу эффективности IE3
IEC60034-30 и класс эффективности 2 GB18613-2012.ИНДУКЦИОННЫЕ ДВИГАТЕЛИ IE3
также в соответствии со стандартами эффективности NEMA, CSA, CEMEP, COPANT,
КАК, НЗС, ДЖИС, ГБ. это самый авторитетный стандарт классификации эффективности
в мире.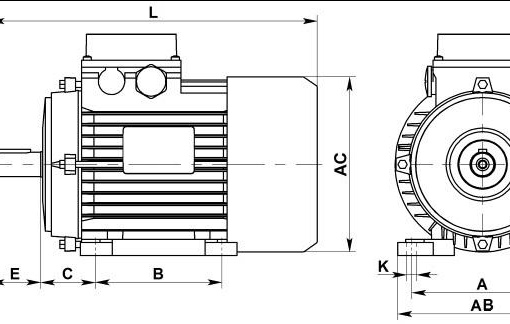
То
выходная номинальная мощность и установочные размеры двигателей точно соответствуют
в соответствии с IEC60072-1. Двигатели YE3 имеют разумную структуру, небольшую вибрацию
и низкий уровень шума.
YE3
3-фазные асинхронные двигатели серии могут широко использоваться в воздуходувках, вентиляторах, насосах, машинах.
инструменты, компрессор, редукторы, упаковочные машины, транспортная техника, горнодобывающая промышленность
оборудование, строительное оборудование и другие машины, которые могут работать с полной
нагрузки в течение длительного времени, трехфазные электродвигатели могут сэкономить значительную электроэнергию, это
выгодно защищать окружающую среду.
2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ IE3
1.
Стандарт исполнения: IEC60034-30
2.
Класс энергоэффективности: IE3
3.
Размер рамы: H80~h455 Полюс: 2P/4P/6P
4.
Номинальная мощность: 0,75 кВт ~ 355 кВт
5.
Напряжение: 380В, 400В, 415В
6.
Частота: 50 Гц, 60 Гц
7.Режим работы: S1 (непрерывная работа)
8.
Закрытый класс защиты: IP55
9.
Класс изоляции: F (повышение температуры измеряется при 80К)
10.
Метод охлаждения: IC411
11.
Способ крепления: B3, B5, B35, V1
12.
Окружающие условия: Высота над уровнем моря ниже 1000 м; Температура окружающей среды
-15~40°С
13.
Соединение: соединение «звезда» для 3 кВт или менее, тогда как соединение «треугольник» для 4 кВт или менее.
более.
Примечание : запрос или заказ необходимо
укажите модель электродвигателя (включая высоту центра рамы, длину рамы, сердечник
длина, количество полюсов, мощность, напряжение, частота), способ монтажа, клеммная коробка
расположение (сверху/сбоку).
Если
клиенты имеют специальный запрос на напряжение, частоту и другие, могут быть упомянуты
в запросе или заказе.
1.
Клиент может выбрать термистор PTC или Pt100 для защиты от перегрева обмотки и
несущий.
2. Клиент может выбрать влагостойкий обогреватель (пространство
обогреватель).
Электрические асинхронные двигатели скольжения
Асинхронный двигатель переменного тока (переменного тока) состоит из статора и ротора, и взаимодействие токов, протекающих в стержнях ротора, и вращающегося магнитного поля в статоре создает крутящий момент, который вращает двигатель . При нормальной работе с нагрузкой скорость ротора всегда отстает от скорости магнитного поля, что позволяет стержням ротора пересекать силовые линии магнитного поля и создавать полезный крутящий момент.
Разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала составляет скольжение — измеряется в об/мин или частоте.
Скольжение увеличивается с увеличением нагрузки, что обеспечивает больший крутящий момент.
Скольжение принято выражать как отношение скорости вращения вала к скорости синхронного магнитного поля.
S = (N S — N A ) 100% / N S (1)
где
S = SLIP
N S = синхронная скорость магнитного поля (об/мин, об/мин)
n a = скорость вращения вала (об/мин, об/мин)
Когда ротор не вращается, скольжение 100 % .
Скольжение при полной нагрузке варьируется от менее 1 % для двигателей высокой мощности до более 5-6 % для двигателей малой мощности.
| Размер двигателя 4 (HP) (HP) 7 | 0.5 | 5 | 15 | 9 | 250 |
|---|---|---|---|---|---|
| Типичный прокладки (%) | 5 | 3 | 2,5 | 1,7 | 0,8 |
Число полюсов, частота и скорость асинхронного двигателя
| №Магнитных полюсов | Частота (Гц) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 | ||||||||||||||||
| 2 | 3000 | 9600 | 9 | |||||||||||||
| 4 | 1500 | 1800 | ||||||||||||||
| 6 | 6 | 6 | 6 | 6 | 6 | 1000 | 1200 | 1200 | 9 | 750 | 900 | |||||
| 9 | 600 | 720 | 12 | 500157 12 | 500157 | |||||||||||
| 9 | ||||||||||||||||
| 16 | 375 | 450 | ||||||||||||||
| 20 | 300 | 360 | ||||||||||||||
Скольжение и напряжение
Когда двигатель начинает вращаться, скольжение составляет 100 % , а ток двигателя максимален. Скольжение и ток двигателя уменьшаются, когда ротор начинает вращаться.
Скольжение и ток двигателя уменьшаются, когда ротор начинает вращаться.
Частота скольжения
Частота уменьшается при уменьшении скольжения.
Скольжение и индуктивное сопротивление
Индуктивное сопротивление зависит от частоты и скольжения. Когда ротор не вращается, частота скольжения максимальна, как и индуктивное сопротивление.
Двигатель имеет сопротивление и индуктивность, и когда ротор вращается, индуктивное сопротивление низкое, а коэффициент мощности приближается к на единицу .
Скольжение и импеданс ротора
Индуктивное сопротивление будет изменяться при скольжении, поскольку полное сопротивление ротора представляет собой сумму фаз постоянного сопротивления и переменного индуктивного сопротивления.
Когда двигатель начинает вращаться, индуктивное сопротивление высокое, а полное сопротивление в основном индуктивное. Ротор имеет низкий коэффициент запаздывающей мощности. Когда скорость увеличивается, индуктивное сопротивление уменьшается, равное сопротивлению.
Классификация асинхронных двигателей
Электрические асинхронные двигатели предназначены для различных применений в отношении таких характеристик, как пусковой момент, тяговый момент, скольжение и т. д. — см. классификацию NEMA A, B, C и D электрических асинхронных двигателей.
Правильный выбор электродвигателя
Производители все чаще задумываются над вопросом энергоэффективности . Более экологичная и экологически безопасная экономика является одной из целей Конференции Организации Объединенных Наций по изменению климата 2015 года, которую взяли на себя многие государства. Но прежде всего для ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование. Согласно исследованию Европейской комиссии, на двигатели приходится 65% промышленного потребления энергии в Европе.Поэтому принятие мер, когда речь идет о двигателях, является важным шагом для сокращения выбросов CO2. Комиссия даже прогнозирует, что к 2020 году можно повысить энергоэффективность двигателей европейского производства на 20–30%.
Если вы также хотите интегрировать энергоэффективные двигатели и получить экономию, внося свой вклад в защиту планеты, вам сначала необходимо ознакомиться со стандартами энергоэффективности для двигателей вашей страны или географического региона .Но будьте осторожны, эти стандарты распространяются не на все двигатели, а только на асинхронные электродвигатели переменного тока .
Международные стандарты
- Международная электротехническая комиссия (МЭК) определила классы энергоэффективности для выпускаемых на рынок электродвигателей, известные как код IE, которые обобщены в международном стандарте МЭК
- IEC определила четыре уровня энергоэффективности, которые определяют энергетические характеристики двигателя:
- IE1 относится к СТАНДАРТНОЙ эффективности
- IE2 относится к ВЫСОКОЙ эффективности
- IE3 относится к эффективности PREMIUM
- IE4 , все еще изучаемый, обещает эффективность SUPER PREMIUM
- МЭК также внедрила стандарт МЭК 60034-2-1:2014 для испытаний электродвигателей .
 Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
.
 Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.В Европе
ЕС уже принял несколько директив, направленных на снижение энергопотребления двигателей, включая обязательство производителей размещать на рынке энергоэффективные двигатели:
- Поэтому класс IE2 является обязательным для всех двигателей с 2011 г.
- Класс IE3 является обязательным с января 2015 года для двигателей мощностью 7.от 5 до 375 кВт (или IE2, если эти двигатели оснащены преобразователем частоты)
- Класс IE3 является обязательным с января 2017 года для двигателей мощностью от 0,75 до 375 кВт (или IE2, если эти двигатели оснащены преобразователем частоты)
В США
В США действуют стандарты, определенные американской ассоциацией NEMA (Национальная ассоциация производителей электрооборудования). С 2007 года минимальный требуемый уровень установлен на уровне IE2.
Та же классификация применяется к Австралия и Новая Зеландия .
Азия
В Китай корейский стандарт MEPS (Минимальный стандарт энергоэффективности) применяется к трехфазным асинхронным двигателям малого и среднего размера с 2002 года (GB 18693). В 2012 году стандарты MEPS были согласованы со стандартами IEC, перейдя от IE1 к IE2, а теперь и к IE3.
Япония согласовала свои национальные нормы с классами эффективности IEC и включила электродвигатели IE2 и IE3 в свою программу Top Runner в 2014 году.Представленная в 1999 году программа Top Runner вынуждает японских производителей постоянно предлагать на рынке новые модели, которые более энергоэффективны, чем модели предыдущих поколений, тем самым подталкивая к подражанию и инновациям в области энергетики.
Индия имеет маркировку сравнительной эффективности с 2009 г. и национальный стандарт на уровне IE2 с 2012 г.
Основы выбора двигателя: Типы электродвигателей
Какой тип электродвигателя выбрать для конвейера, XYZ-стола или робота? Прежде чем выбрать один, вы должны понять характеристики каждого типа двигателя на рынке.
Типы электродвигателей
Существует два очевидных типа электродвигателей в зависимости от входного напряжения: переменного тока (переменного тока) и постоянного тока (постоянного тока).
В то время как двигатели переменного тока используют переменный ток для питания ряда намотанных катушек, двигатели постоянного тока используют постоянный ток для питания угольных щеток или электрической коммутации. Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Важно понимать не только различия между характеристиками двигателей переменного и постоянного тока, но и конкретные типы в этих категориях.
Помните, что некоторые производители могут предлагать как двигатели, так и драйверы. Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Теперь давайте углубимся в двигатели переменного и постоянного тока.
Электродвигатели переменного тока
Двигатели переменного тока
можно разделить на четыре основные категории: с расщепленными полюсами, с расщепленной фазой, с конденсаторным пуском, с конденсаторным пуском/работой с конденсатором и с постоянным разделенным конденсатором.
Поскольку компания Oriental Motor производит только двигатели переменного тока с постоянными конденсаторами с разделенным конденсатором, мы будем рассматривать только двигатели PSC.
Каждый тип двигателя PSC аналогичен по конструкции. В статоре имеются обмотки, а для вращения используется короткозамкнутый ротор. Конденсаторы необходимы для однофазных двигателей для создания многофазного источника питания. Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Асинхронные двигатели / Асинхронные двигатели
Асинхронные двигатели
являются наиболее распространенными и рассчитаны на непрерывную работу.Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
На приведенном ниже рисунке показана конструкция асинхронного двигателя.
① Фланцевый кронштейн |
 Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке. Как они работают
Когда двигатель включен, он создает вращающееся магнитное поле в статоре.На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
Вот сообщение в блоге для получения дополнительной информации об асинхронных двигателях переменного тока.
Асинхронные двигатели
надежны и могут использоваться для различных приложений общего назначения, где необходима непрерывная работа, а точность остановки не имеет решающего значения. Однофазные двигатели предлагаются для требований с фиксированной скоростью .Требования к переменной скорости могут быть удовлетворены путем объединения трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Однофазные двигатели предлагаются для требований с фиксированной скоростью .Требования к переменной скорости могут быть удовлетворены путем объединения трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Кривая скорость-момент отображает ожидаемую мощность двигателя Производительность двигателя представлена на графике кривой скорости-крутящего момента. Асинхронный двигатель переменного тока запустится с нулевой скорости при крутящем моменте «Ts», затем постепенно увеличит свою скорость за пределами нестабильной области и установится на «P» в стабильной области, где нагрузка и крутящий момент уравновешены.Любые изменения его нагрузки приведут к смещению положения «P» по кривой, и двигатель остановится, если он будет работать в нестабильной области. |
 Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».Реверсивные двигатели
Реверсивные двигатели по определению могут работать в обратном направлении и идеально подходят для работы в режиме пуска/останова. Реверсивный двигатель похож на асинхронный двигатель, но с фрикционным тормозом и более сбалансированными обмотками.Благодаря фрикционному тормозному механизму его обгон уменьшается примерно до 6 оборотов после отключения питания (до включения передачи). Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Из-за дополнительного тепла, выделяемого реверсивными двигателями, их рекомендуемый рабочий цикл составляет всего 30 минут или 50 %. Примером применения реверсивного двигателя является делительный конвейер, который не слишком требователен к пропускной способности или точности остановки.
В задней части реверсивного двигателя установлен фрикционный тормозной механизм.Спиральная пружина оказывает постоянное давление, чтобы позволить тормозной колодке скользить к тормозному диску. Тормозное усилие, создаваемое тормозным механизмом реверсивного двигателя Oriental Motor, составляет примерно 10% выходного крутящего момента двигателя. | |
| На графике показана разница между кривыми скорость-момент асинхронного двигателя и реверсивного двигателя. |
Двигатели с электромагнитным тормозом
Электродвигатели с электромагнитным тормозом
сочетают в себе трехфазный асинхронный двигатель или однофазный реверсивный двигатель со встроенным электромагнитным тормозом, активируемым при отключении питания.По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Тормозной механизм внутри двигателя с электромагнитным тормозом более совершенен, чем реверсивный двигатель. Вместо тормозной колодки и винтовой пружины, которая постоянно оказывает давление, электромагнитный тормоз включается и выключается электромагнитным и пружинным механизмом.
Как они работают
Как показано на изображении выше, когда на катушку магнита подается напряжение, якорь притягивается к электромагниту против силы пружины, тем самым освобождая тормоз и позволяя валу двигателя свободно вращаться. Когда напряжение не подается, пружина прижимает якорь к тормозной ступице и удерживает вал двигателя на месте, тем самым приводя в действие тормоз.
Электродвигатели с электромагнитным тормозом
используются в вертикальных приложениях, где груз должен удерживаться, или в приложениях, где груз должен быть заблокирован в положении при отключении питания.
Моментные двигатели
Моментные двигатели
предназначены для обеспечения высокого пускового крутящего момента и наклонных характеристик (крутящий момент максимален при нулевой скорости и неуклонно снижается с увеличением скорости), а также для работы в широком диапазоне скоростей. Благодаря своей способности изменять выходной крутящий момент в зависимости от входного напряжения, они обеспечивают стабильную работу при заблокированном роторе или в условиях остановки, например, при намотке/натяжении.
Простая регулировка крутящего момента для натяжения |
Синхронные двигатели
Синхронные двигатели называются «синхронными», потому что они используют специальный ротор для синхронизации его скорости с частотой входной мощности.Для 4-полюсного синхронного двигателя, работающего на частоте 60 Гц, он будет вращаться со скоростью 1800 об/мин («синхронная скорость»). Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Другой тип синхронного двигателя, называемый низкоскоростным синхронным двигателем, обеспечивает высокоточное регулирование скорости, низкоскоростное вращение и быстрое двунаправленное вращение. В этих двигателях в роторе используются постоянные магниты, поэтому они очень отзывчивы.Однако они увеличивают количество полюсов, поэтому синхронная скорость снижается до 72 об/мин при 60 Гц. Низкоскоростные синхронные двигатели могут останавливаться в течение 0,025 секунды при частоте 60 Гц, если они работают в пределах допустимой инерции нагрузки.
Базовая конструкция низкоскоростных синхронных двигателей такая же, как у шаговых двигателей. Поскольку они могут работать от источника переменного тока и обеспечивают превосходные характеристики пуска и остановки, их иногда называют «шаговыми двигателями переменного тока».
Двигатели постоянного тока
Двигатели постоянного тока
используют постоянный ток для питания угольных щеток и коммутатора или электрически коммутируют обмотки с помощью драйвера.Двигатели постоянного тока примерно на 30% эффективнее двигателей переменного тока, поскольку им не нужно индуцировать ток для создания магнитных полей. Вместо этого в роторе используются постоянные магниты.
Двигатели постоянного тока бывают двух основных типов: щеточные и бесщеточные. В то время как щеточные двигатели предназначены для приложений общего назначения, бесщеточные двигатели предназначены для точных приложений.
Коллекторные двигатели
Источник: Linear Motion Tips/Design World
Щетки и коллектор внутри коллекторного двигателя механически коммутируют обмотки двигателя, и он продолжает вращаться до тех пор, пока к нему подключен источник питания.Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели предлагаются в нескольких типах: щеточные двигатели с постоянными магнитами, шунтирующие, последовательные и составные.Типичное применение щеточного двигателя включает радиоуправляемые автомобили и дворники.
Поскольку компания Oriental Motor не производит щеточные двигатели, мы предлагаем ограниченную информацию о щеточных двигателях.
Бесщеточные двигатели
Системы бесщеточных двигателей
обеспечивают лучшую производительность, чем щеточные двигатели, благодаря электрической коммутации и обратной связи с обратной связью, но требуют, чтобы драйверы электрически коммутировали обмотки двигателя. Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Как они работают
Бесщеточный двигатель имеет встроенный магнитный элемент или оптический энкодер для определения положения ротора. Датчики положения посылают сигналы в схему привода. В бесщеточном двигателе используются трехфазные обмотки
, соединенные по схеме «звезда». В роторе используется радиально-сегментированный постоянный магнит.
ИС на эффекте Холла используется для магнитного элемента датчика. Внутри статора размещены три микросхемы на эффекте Холла, которые посылают цифровые сигналы при вращении двигателя.Эти сигналы сообщают водителю, с какой скоростью работает двигатель и когда нужно подать питание на следующий набор обмоток точно в нужное время.
Системы бесщеточных двигателей и приводов часто сравнивают с двигателями переменного тока и системами частотно-регулируемого привода. Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Мы также показываем кривую скорости и крутящего момента системы бесщеточного двигателя по сравнению с двигателем переменного тока и системой ЧРП с эквивалентным типоразмером корпуса.
| Бесщеточный двигатель + привод | Двигатель переменного тока + ЧРП |
По сравнению с щеточными двигателями и двигателями переменного тока бесщеточные двигатели обладают рядом преимуществ, которые могут улучшить работу или уменьшить размеры для таких приложений, как конвейеры и мобильные роботы.
Преимущество бесщеточного двигателя
| Преимущества по сравнению с коллекторными двигателями | по сравнению с двигателями переменного тока |
|
|
Вот сообщение в блоге для получения дополнительной информации о различиях между щеточными и бесщеточными двигателями.
Бесщеточные двигатели
Oriental Motor работают в паре с собственными драйверами скорости, что обеспечивает гарантированные технические характеристики и быструю настройку. Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Этот пост в блоге дает общее представление о многих типах двигателей, представленных на рынке.В дополнение к различиям в производительности решающими факторами также могут быть качество, стоимость, ассортимент продукции, время выполнения заказа и поддержка. Очень важно найти поставщика двигателей, такого как Oriental Motor, который может гарантировать качество работы, предоставлять экспертную поддержку для широкого спектра продуктов и поставлять его в разумно короткие сроки.
Технически бесщеточные двигатели также включают шаговые двигатели и серводвигатели, которые предназначены для еще более точных приложений благодаря их превосходной способности останавливаться в точных местах. Пока я планирую в ближайшем будущем написать в блоге о различиях между шаговыми двигателями и серводвигателями, вот сообщение в блоге о различиях между гибридными шаговыми двигателями, шаговыми двигателями с постоянными магнитами и шаговыми двигателями виртуальной реальности.
Пока я планирую в ближайшем будущем написать в блоге о различиях между шаговыми двигателями и серводвигателями, вот сообщение в блоге о различиях между гибридными шаговыми двигателями, шаговыми двигателями с постоянными магнитами и шаговыми двигателями виртуальной реальности.
Помните, что эти двигатели могут быть оснащены внешними механизмами для преобразования вращательного движения в поступательное, как в системах с шарико-винтовой передачей и реечной шестерней.
Готовы к небольшой практике? Какой тип двигателя вы бы использовали для этих приложений?
Нажмите на GIF-файлы приложений ниже, чтобы увидеть рекомендуемые двигатели для этих приложений.
| Конвейер промывки | Стол XYZ |
Типы электродвигателей — Thomson Lamination Company, Inc.
Электродвигатели можно найти во многих различных областях, от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических применений. Здесь мы делимся руководством, чтобы дать вам лучшее представление о доступных вариантах.
Здесь мы делимся руководством, чтобы дать вам лучшее представление о доступных вариантах.
Электродвигатели и генераторы
Электродвигатели и генераторы представляют собой электромагнитные устройства с якорной обмоткой или ротором, который вращается внутри обмотки возбуждения или статора; однако они имеют противоположные функции. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях обеспечивает электрический ток для создания постоянного магнитного поля, которое якорная обмотка использует для создания крутящего момента на валу двигателя.Различия между различными типами электродвигателей связаны с их уникальными характеристиками, напряжением и требованиями к применению. Существует не менее дюжины различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом, создавая механическую силу, создает дополнительные различия в каждой из этих классификаций.
То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом, создавая механическую силу, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Коллекторные двигатели
Коллекторные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Щетки
- Коллектор
Существует четыре основных типа коллекторных двигателей, в том числе:
- Двигатели серии . Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низких скоростях, ограниченный крутящий момент на высоких скоростях.
- Шунтирующие двигатели. Катушка возбуждения параллельна (шунтирует) ротору, поэтому ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличный контроль скорости, высокий/постоянный крутящий момент на низких скоростях.
- Накопительные составные двигатели. Этот тип сочетает в себе аспекты как последовательного, так и закрытого типов, что делает ток двигателя равным сумме токов последовательного и шунтирующего возбуждения. Характеристики: используется в промышленности и автомобилестроении, сочетает в себе преимущества серийных и параллельных двигателей.
- Электродвигатели постоянного тока с постоянными магнитами. Наиболее распространенный тип щеточного электродвигателя. В двигателях с постоянными магнитами постоянного тока для создания поля статора используются постоянные магниты. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на низких оборотах, ограниченный крутящий момент на высоких оборотах.

Бесщеточный
Двигатели бесщеточной категории не имеют коллектора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо управления магнитными полями на роторе бесщеточные двигатели управляют магнитными полями от статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и создавать крутящий момент в более компактной сборке.
Вместо управления магнитными полями на роторе бесщеточные двигатели управляют магнитными полями от статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и создавать крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели в классификации двигателей переменного тока бывают синхронными или асинхронными, в первую очередь отличающимися скоростью вращения ротора относительно скорости статора. Скорость ротора относительно статора равна в синхронном двигателе, но скорость ротора меньше его синхронной скорости в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, а асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигатель
Синхронный двигатель представляет собой машину с двойным возбуждением, т. е. включает два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора для создания трехфазного вращающегося магнитного потока. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора блокируется полем статора, двигатель становится синхронным.
е. включает два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора для создания трехфазного вращающегося магнитного потока. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора блокируется полем статора, двигатель становится синхронным.
Асинхронный (индукционный)
В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные путем подачи питания на статор без подачи питания на ротор.Асинхронные двигатели имеют конструкцию с обмоткой или с короткозамкнутым ротором. Вот некоторые примеры асинхронных двигателей:
- Конденсаторные пусковые асинхронные двигатели. Это однофазный двигатель с короткозамкнутым ротором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частыми пусками и остановками.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазное питание создает магнитное поле в обмотке статора в этом двигателе, который включает в себя короткозамкнутый ротор из стальных пластин с высокой проводимостью.Это недорогие, малообслуживаемые и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших воздуходувках и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с короткозамкнутым ротором. Эти двигатели устраняют проблемы с низким пусковым моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.

Нажмите, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от соответствия четырем характеристикам:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и монтажные позиции
Металлическая табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Мощность и скорость электродвигателя
Номинальная мощность и скорость вращения (об/мин) должны соответствовать требованиям к нагрузке для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 л.с. до 1 л.с.), интегральные двигатели (от 1 л.с. до 400 л.с.) и большие двигатели (от 100 л.с. до 50 000 л.с.). Номинальные значения оборотов включают 3600 об/мин (2 полюса), 1800 об/мин (4 полюса) и 1200 об/мин (6 полюсов).
Рама электродвигателя
Размер корпуса двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность.Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, а их цифры относятся к их размеру «D» или расстоянию от центра вала до центральной нижней части крепления. Как правило, двузначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.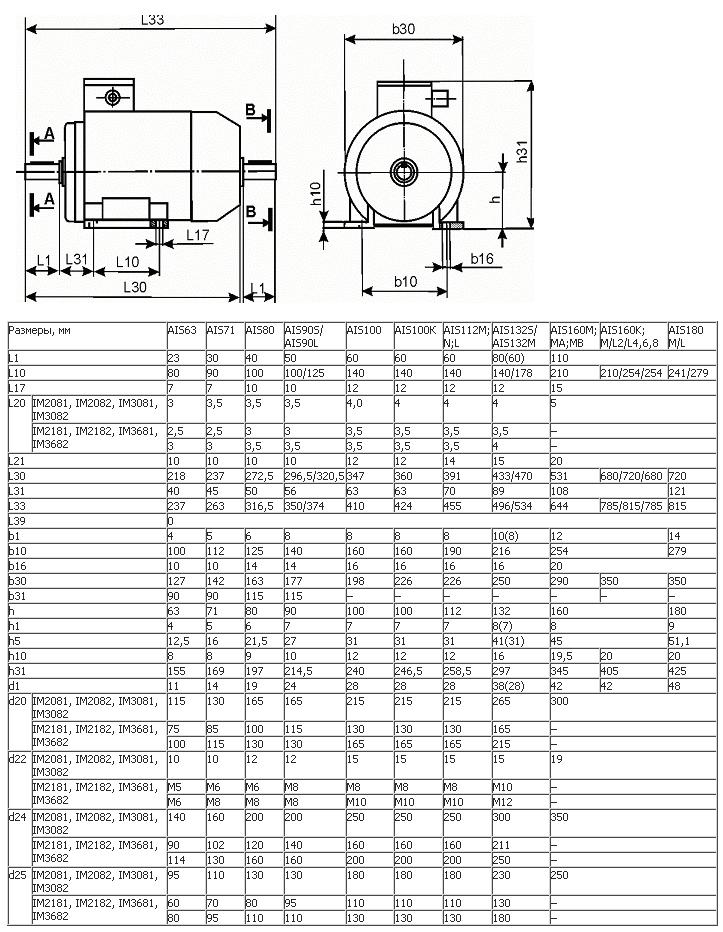
Требования к напряжению
Напряжение, частота и фаза являются частью требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели имеют двойные индикаторы напряжения, такие как 230/460.Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 своей нормальной скорости вращения. Фаза — это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого питания, например, трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от условий установки двигателя.Существует две основные категории корпусов — открытые двигатели и закрытые двигатели.
Открытые двигатели
Открытые двигатели применяются в относительно чистых и сухих помещениях, что важно, поскольку открытые корпуса двигателей обеспечивают циркуляцию воздуха через обмотки.
Закрытые двигатели
Эти типы не допускают свободного воздухообмена между внешней и внутренней частью двигателя. Различия в герметичности корпуса и функциях охлаждения также различают типы двигателей в закрытом корпусе, в том числе:
- Полностью закрытый вентилятор с охлаждением (TEFC)
- Полностью закрытый невентилируемый (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая мойка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, наиболее подходящий для вашего применения
Thomson Lamination Company — ведущий производитель штампованных пластин для двигателей, способный производить большие партии пластин ротора и статора из металлов с высокой проводимостью.
Ознакомьтесь с нашими производственными возможностями для ламинирования или свяжитесь с нами, чтобы узнать больше о наших решениях для ламинирования с помощью электродвигателей.
NORD — Электродвигатели | Промышленный двигатель
Электродвигатели
Большая мощность, низкое энергопотребление
NORD поставляет широкий ассортимент электродвигателей, отвечающих всем общепринятым мировым нормам и стандартам эффективности. Наши двигатели используются во многих областях, поскольку они не только мощные и высококачественные, но и могут сочетаться со всем ассортиментом редукторов NORD.
Будь то мешалки, конвейерные системы, внутренняя логистика или пищевая промышленность: электродвигатели NORD можно найти везде, где требуется высокая производительность. Они надежно работают в течение многих лет с очень высоким КПД (до 95%). Это экономит эксплуатационные расходы для наших клиентов и в то же время помогает защитить окружающую среду.
Причины купить электродвигатели NORD:
- Максимальная эффективность
Наши электродвигатели соответствуют требованиям действующего стандарта IEC 60034-30-1:2014, а также EUP 640/2009 – даже энергосберегающие синхронные двигатели имеют высший класс эффективности IE4. - Непревзойденное качество
Мы производим все двигатели в соответствии со строгими стандартами. - Высокая доступность
Благодаря собственному производству мы можем быстро доставлять все наши электродвигатели по всему миру. - Высокая гибкость
Благодаря одинаковым размерам двигателя вы можете переходить от одного класса эффективности к другому без механических модификаций.

Прочные и экономичные – наши электродвигатели
Электрические приводы в промышленности потребляют до 70% всей необходимой энергии.Для многих компаний это открывает большие возможности для оптимизации. В связи с этим компания NORD разработала ряд мощных энергосберегающих электродвигателей. Эти автономные двигатели отличаются высокой эффективностью и в большинстве случаев значительно более эффективны, чем требуется действующими нормами. Энергосберегающие электродвигатели NORD
подходят практически для всех областей применения. Особенно экономичная серия IE4 доступна в трех размерах и мощностью от 1,5 до 7,5 л.с.
Особенно экономичная серия IE4 доступна в трех размерах и мощностью от 1,5 до 7,5 л.с.
Вы хотите значительно сократить расходы на электроэнергию? Узнайте больше о наших энергоэффективных синхронных двигателях IE4!
Нажмите здесь
Электродвигатели специального назначения
В некоторых случаях нельзя использовать стандартные двигатели, например.г. поскольку условия окружающей среды слишком суровые, необходимо перемещать очень тяжелые грузы или существует опасность взрыва. Для этих случаев в нашем ассортименте имеются специальные двигатели мощностью от 0,16 до 40 л.с.: Взрывозащищенные версии доступны в качестве опции для использования в запыленных и газовых средах. Наши двигатели сертифицированы в соответствии с ATEX, IECEx и HazLoc.
Испытайте наши автономные двигатели в чрезвычайно суровых условиях сталелитейного завода!
Посмотреть видео
Высокоэффективные двигатели и экологичность — Электродвигатель
Согласно некоторым исследованиям, на электродвигатели приходится около 45% всего потребления электрической энергии [1]. Если мы сосредоточим анализ на одной из самых энергозатратных областей, промышленной, процент, приписываемый двигателям, возрастет примерно до двух третей.
Если мы сосредоточим анализ на одной из самых энергозатратных областей, промышленной, процент, приписываемый двигателям, возрастет примерно до двух третей.
Учитывая, что некоторые из эксплуатируемых в настоящее время машин устарели, становится очевидным, что замена их новыми более эффективными двигателями приведет к важным преимуществам для окружающей среды и использования ресурсов, а также к снижению производственных затрат и, следовательно, к повышению конкурентоспособности. По их оценкам, например, только в Европе использование передовых приводных технологий вместо устаревших может привести к сокращению годового потребления на 135 ТВтч и выбросов CO 2 на 69 млн тонн [2].Оценивая весь жизненный цикл двигателя в постоянной эксплуатации, можно убедиться, что затраты, связанные с потреблением энергии, составляют значительно больший процент в общей стоимости (даже более 90%, [3]).
По этим причинам в Европейском Союзе , а также в США, Китае и других странах действуют нормативные планы, предусматривающие обязательное соблюдение постепенно повышающихся требований к эффективности для новых установок. В соответствии со Стандартом минимальной энергетической эффективности (MEPS), например, двигатели, выпущенные на рынок ЕС с января 2017 года в диапазоне мощностей от 0,75 до 375 кВт, должны иметь уровень эффективности IE3 или уровень эффективности IE2, если они питаются от инвертора (см. рис. 1), за очень редкими исключениями.
В соответствии со Стандартом минимальной энергетической эффективности (MEPS), например, двигатели, выпущенные на рынок ЕС с января 2017 года в диапазоне мощностей от 0,75 до 375 кВт, должны иметь уровень эффективности IE3 или уровень эффективности IE2, если они питаются от инвертора (см. рис. 1), за очень редкими исключениями.
Рис. 1. Значения эффективности, соответствующие классам IE, определенным регламентом IEC/EN 60034-30-1:2014.
Благодаря технологии, наиболее распространенной сегодня среди двигателей, асинхронному двигателю (или асинхронному двигателю , IM), усовершенствования, требуемые в будущем, будут невозможны, по крайней мере, при разумных затратах и для всех диапазонов мощности.Эти аспекты в сочетании с другими факторами, такими как растущее осознание важности снижения энергопотребления, приводят к внедрению малораспространенных до сих пор двигателей, таких как синхронные двигатели с постоянными магнитами , [4][5]. Фактически, этот класс двигателей обладает собственными характеристиками, позволяющими заметно повысить эффективность и удельную мощность, в частности очень низкими потерями в роторе.
Фактически, этот класс двигателей обладает собственными характеристиками, позволяющими заметно повысить эффективность и удельную мощность, в частности очень низкими потерями в роторе.
Даже если уже в восьмидесятых годах «бесщеточные» серводвигатели (т.е. Surface Mount‑PMSM, SM‑PMSM) нашли применение в промышленной автоматике, благодаря отличной управляемости и высокой динамике применение электрических синхронных машин с ненамотанным ротором долгое время оставалось ограниченным конкретными приложениями. За последние несколько лет, наоборот, благодаря вышеупомянутым факторам, касающимся эффективности и снижения себестоимости двигателей и инверторов, внедрение этого типа двигателей заметно расширяется.
Классификация двигателей переменного тока
Большинство двигателей переменного тока (AC) являются трехфазными, даже если есть некоторые исключения, например, в случае однофазных и шаговых двигателей (которые обычно являются двухфазными).Наиболее важное различие, как правило, между синхронными и асинхронными машинами, различие основано на том факте, что механическая скорость вращения в установившемся режиме строго связана (синхронность) или нет с частотой вращения магнитного поля статора. Это отличие конкретно выражается в том, что для создания момента в асинхронной машине необходимо наличие наведенных токов в роторе, тогда как в синхронной машине оно не нужно (и, наоборот, нежелательно).
Это отличие конкретно выражается в том, что для создания момента в асинхронной машине необходимо наличие наведенных токов в роторе, тогда как в синхронной машине оно не нужно (и, наоборот, нежелательно).
Синхронные машины характеризуются тем, что магнитное поле ротора геометрически связано с механическим положением самого ротора. Поле ротора может создаваться током, протекающим через обмотку (синхронные двигатели с фазным ротором), постоянными магнитами (синхронные с постоянными магнитами) или самим током статора, модулированным магнитной анизотропией ротора (синхронное сопротивление).
Конструктивно и ротор, и статор машин с радиальным потоком (которых, безусловно, большинство) изготавливаются путем укладки ферромагнитных пластин , своевременно заглушенных, что является решением, направленным на сдерживание паразитных токов.Ротор обычно имеет цилиндрическую форму и может быть оборудован отсеками для размещения постоянных магнитов или проводящего материала.
На рис. 2 схематично показаны сечения только что перечисленных двигателей различных типов (за исключением синхронного с фазным ротором).
Рис. 2. Различные конфигурации ротора (слева направо): асинхронный или асинхронный двигатель (АД), синхронный двигатель с внутренними постоянными магнитами (IPPMM), синхронные двигатели с внутренними постоянными магнитами с клеткой ротора (IPSMM с линейным пуском), синхронный с поверхностными постоянными магнитами двигатель (SM-PMSM) синхронный реактивный двигатель (SynRM).
Наиболее темные области (прорези) соответствуют обмоткам, синим цветом обозначены постоянные магниты, а серая зона сечения представляет ферромагнитный материал (ламинирование). Как видите, разница между различными типами двигателей сосредоточена в роторе, тогда как статор (за исключением особых случаев) может быть реализован таким же образом. В асинхронном двигателе пазы ротора заполнены расплавом, который представляет собой так называемую «беличью клетку», обычно изготавливаемую из алюминия или, в последнее время, из меди (с более высокими затратами, чтобы уменьшить потери).
В двигателях с постоянными магнитами вместо этого магниты могут быть введены в соответствующие вырезы внутри конструкции ротора (IPMSM и IPMSM с линейным пуском) или установлены на поверхности в случае SM-PMSM. Вместо этого в случае SynRM вырезы внутри ротора просто пусты и называются «барьерами потока», поскольку они выполняют функцию увеличения сопротивления (т. е. способности противодействовать прохождению магнитного потока) в одних направлениях, благоприятствуя вместо этого другим ( т.е. пути, более характеризующиеся наличием железа).
В свою очередь синхронные двигатели можно разделить по принципу создания крутящего момента. В двигателях с поверхностными постоянными магнитами создание крутящего момента происходит только благодаря взаимодействию между полем, создаваемым постоянными магнитами, и током статора.
И наоборот, в реактивных двигателях , используется тенденция системы минимизировать сопротивление магнитных путей, если они подвергаются возбуждению. В двигателях с внутренним магнитом (IPMSM) обычно используются оба принципа.
В двигателях с внутренним магнитом (IPMSM) обычно используются оба принципа.
При производстве постоянных магнитов используются особые материалы для достижения высоких значений индукции и предотвращения риска размагничивания (обычно связанного с высокими температурами или сильным магнитным полем). Наиболее часто используемыми материалами являются неодим-железо-бор, самарий-кобальт и алюминий-никель-кобальт. Особенно в случае SM-PMSM количество активного магнитного материала велико, с большим весом сырья в общей стоимости. Это состояние усугубляется сильной изменчивостью цен на так называемые «редкоземельные элементы» [7], элементы, используемые в небольших количествах, но очень важные для качества магнита.Помимо проблем стоимости и доступности, эти материалы вызывают также важные экологические, политические и этические проблемы, связанные с их добычей, торговлей и удалением. По этим причинам огромные ресурсы вкладываются в исследования и разработки различных материалов и, особенно, в проекты двигателей, которые сводят к минимуму использование постоянных магнитов [8] или позволяют использовать так называемые ферриты, т. е. керамические магнитные материалы, в которых используются менее проблемные материалы.
е. керамические магнитные материалы, в которых используются менее проблемные материалы.
Электропитание через инвертор и блок управления
Негативным аспектом синхронных двигателей является невозможность питания их простым подключением к сети (Direct On‑Line, DOL), как это происходит с асинхронными двигателями.Поэтому для работы синхронных или реактивных двигателей с постоянными магнитами необходимо наличие «привода», т. е. целого, состоящего из реального инвертора (чисто электронного силового привода), электронного контроллера и реализованных в нем алгоритмов. Алгоритм управления, реализованный на цифровом устройстве, обновляется с частотой порядка 10 000 раз в секунду. Несмотря на дополнительные затраты, стоит учитывать возможность изменения условий работы, в частности скорости, что дает важные преимущества в некоторых приложениях (особенно в насосах и вентиляторах, где это обеспечивает значительную экономию энергии).
Управляя инвертором в ШИМ (широтно-импульсной модуляции), можно эффективно генерировать напряжение, которое характеризуется амплитудой, частотой и произвольными фазами.
Поскольку в синхронных двигателях момент зависит от амплитуды тока и от его фазового соотношения с магнитной осью ротора, в алгоритмах управления обычно используется преобразование координат Парка, что приводит трехфазную систему к системе отсчета, интегральной с ось ротора (фиг.6).
Рис. 6. Слева: двигатель градирни с прямым приводом, без защитной оболочки; справа заглушка пластин статора (справа) (сайт ABB-Baldor).
Знание положения ротора необходимо для управления синхронным двигателем. В некоторых приложениях, где не требуются особые характеристики управления, можно отказаться от механического датчика положения из-за его стоимости и связанного с этим снижения надежности. На самом деле были разработаны «бессенсорные» методы управления, в которых положение ротора оценивается с использованием измерений тока и напряжения (внутри инвертора и в любом случае необходимых) и модели двигателя.
Бездатчиковая техника для синхронных двигателей, разрабатываемая с 90-х годов, первоначально нашла применение только в некоторых специфических случаях. В продуктах, которые в настоящее время называются «инверторами», то есть в приводах общего назначения, первые алгоритмы этого типа были введены в конце 2000-х годов, а в последние годы они стали практически стандартным оборудованием. К сожалению, операторы автоматики до сих пор мало знают об этих решениях, даже если их эффективность была продемонстрирована, особенно в обычных приложениях, таких как насосы и вентиляторы.
В продуктах, которые в настоящее время называются «инверторами», то есть в приводах общего назначения, первые алгоритмы этого типа были введены в конце 2000-х годов, а в последние годы они стали практически стандартным оборудованием. К сожалению, операторы автоматики до сих пор мало знают об этих решениях, даже если их эффективность была продемонстрирована, особенно в обычных приложениях, таких как насосы и вентиляторы.
Поскольку данных, предоставляемых изготовителем двигателя, часто бывает недостаточно для калибровки всех параметров алгоритма управления, были разработаны методы «самозапуска», то есть ввода в эксплуатацию с минимальным вмешательством оператора. Первым шагом является автоматическая идентификация параметров («самоидентификация») методами, выполняемыми самим приводом, чтобы затем перейти к реальной калибровке, т. е. к выбору значений для параметров управления. И промышленность, и академический мир активно исследуют эти аспекты с очень интересными предложениями также в итальянской сфере [10]-[14].
Детали конструкции
Как уже было сказано, самая большая разница между различными типами двигателей переменного тока в основном заключается в конструкции ротора . На самом деле существуют различные случаи синхронных двигателей, предназначенных для сохранения других частей почти неизменными по сравнению с соответствующей асинхронной машиной (в конечном итоге с изменением витков обмотки). Такой подход получил распространение в последние несколько лет с целью удовлетворения общих приложений, а именно замены асинхронного двигателя.Помимо очевидных преимуществ в производственных затратах, использование эквивалентных деталей по габаритным размерам, опорам и внешним точкам крепления позволило внедрить эти двигатели без изменения остальной механики. В этом отношении инновационные примеры представлены продукцией итальянских компаний, такой как серия синхронных двигателей с внутренними постоянными магнитами и реактивных двигателей, показанных на рис. 5.
5.
Рис. 4. Представление преобразования координат Парка на базе векторного управления.
В синхронных двигателях , особенно в двигателях с постоянными магнитами, можно реализовать большое количество полюсов, с уменьшением скорости при том же напряжении и увеличением крутящего момента при том же токе. Данную степень свободы в проекте можно сравнить по аналогии с применением механического редуктора и, следовательно, в ряде приложений позволяет использовать безредукторное соединение с некоторыми преимуществами по КПД, габаритным размерам, стоимости. , надежность и точность управления.Это решение было принято в течение нескольких лет в промышленных машинах (например, в производстве бумаги, [14]), в секторе гражданских подъемников (лифты), в очистке воздуха (вентиляторы градирен, [15]) и в некоторые бытовые приборы (в частности стиральные машины).
В проекте, рассмотренном в [15], в качестве конструктивного элемента использован статорный пакет (пластины) без добавления внешнего кожуха. На рис. 6 также показана конструкция статора пластины , где видно внешнее крыло для отвода тепла.Благодаря габаритным размерам, ограниченным по высоте, этот двигатель устанавливается в основании градирни на оси вентилятора, что позволяет избежать прямоугольной передачи и снижения скорости, которые вместо этого необходимы в традиционной конфигурации (с асинхронным двигателем). двигатель).
На рис. 6 также показана конструкция статора пластины , где видно внешнее крыло для отвода тепла.Благодаря габаритным размерам, ограниченным по высоте, этот двигатель устанавливается в основании градирни на оси вентилятора, что позволяет избежать прямоугольной передачи и снижения скорости, которые вместо этого необходимы в традиционной конфигурации (с асинхронным двигателем). двигатель).
Применение
Первые приложения в гражданском секторе синхронных двигателей с постоянными магнитами включают системы кондиционирования из-за важности энергопотребления в этом случае.В холодильной технике и (как промышленной, так и бытовой) постепенно растет использование синхронных двигателей. Кроме того, особый случай представляют циркуляционные насосы для теплоцентралей, которые из соображений экономичности в настоящее время почти полностью базируются на синхронных двигателях с постоянными магнитами с бездатчиковым управлением.
Среди бытовых приборов в стиральных машинах использование этих типов двигателей стало обычным в последние несколько лет. Использование синхронных двигателей вместо асинхронных или универсальных (со щетками) позволило, с одной стороны, уменьшить габариты и количество используемого материала, а с другой стороны, улучшить управляемость, связанную также с принятием таких решений, как механическое прямое соединение.В последнем случае из-за габаритных ограничений и требований к крутящему моменту ротор обычно является внешним, а весь двигатель плоским и большого диаметра (рис. 7).
Рис. 7. Синхронный двигатель с постоянными магнитами и прямым приводом, с внешним ротором (веб-сайт LG).
Деталью производства этого типа машин, используемой также для других конкретных применений, является обмотка на зубе (отдельная обмотка для каждого зуба статора).
В этом типе количество незадействованных медных деталей уменьшено, но становится сложнее проектировать машины с низкими пульсациями крутящего момента. Прямое соединение обеспечивает преимущества также с точки зрения общей работы, облегчая идентификацию нагрузки в резервуаре и ее размещение, а также контроль скорости.
Прямое соединение обеспечивает преимущества также с точки зрения общей работы, облегчая идентификацию нагрузки в резервуаре и ее размещение, а также контроль скорости.
Из-за особенностей рабочего цикла стиральных машин, включающего отжим-сушку, важна работа на высокой скорости (превышающей номинальную). Эта модальность называется « дефлюкса », потому что, поскольку напряжение пропорционально расходу и скорости, общий расход уменьшается за счет своевременного управления, чтобы обеспечить работу на более высоких скоростях и фиксированном напряжении.В этом случае синхронные двигатели с внутренними постоянными магнитами являются основными кандидатами, поскольку их доступный крутящий момент не падает внезапно за пределы номинальной скорости.
Область, в которой широко используются синхронные двигатели, это лифты , особенно крупногабаритные. В этом случае также были реализованы специальные решения, подобные тому, что на рис. 8, допускающие прямое движение нагрузки (безредукторное).
Рис. 8. Подъемная система для безредукторных подъемников с синхронным двигателем с постоянными магнитами и осевым потоком (веб-сайт Kone).
В данном случае это осевой двигатель, т.е. зазор между статором и ротором (магнитный зазор) пересекают силовые линии, параллельные оси.
Другие конкретные области применения касаются возобновляемых источников (например, энергии ветра) и авионики , где они преследуют цель «Больше электрических самолетов» (замена гидравлических или пневматических приводов). Использование двигателей с высоким КПД и высокой плотностью также распространяется в тяговых , включая дорожный сектор (от велосипедов до тяжелых транспортных средств и рабочих машин), железнодорожный/трамвайный сектор и промышленный сектор (вилочные погрузчики и т.п.).
Библиография
- Уайлд, К. У. Бруннер, «Возможности политики энергоэффективности для систем с электроприводом», Международное энергетическое агентство, рабочий документ, 2011 г.
- «Электродвигатели и приводы с регулируемой скоростью. Стандарты и юридические требования к энергоэффективности трехфазных двигателей низкого напряжения», ZVEI — Zentralverband Elektrotechnik- und Elektronikindustrie eV, Division Automation — Electric Drive Systems, Франкфурт, декабрь 2010 г., 2-е издание. .
- «Повышение рентабельности промышленности с помощью энергоэффективных приводов и двигателей», брошюра ABB, 2016 г.
- Вагати, «Решение синхронного реактивного сопротивления: новая альтернатива в приводах переменного тока», 20-я Международная конференция по промышленной электронике, управлению и контрольно-измерительным приборам, 1994 г. IECON ’94., Болонья, 1994 г., стр. 1-13, том 1.
- Липо, Т. А., «Синхронные реактивные машины — жизнеспособная альтернатива приводам переменного тока», Wisconsin Electric Machines and Power Electronics Consortium, исследовательский отчет, 1991.
- «Низковольтные двигатели с технологическими характеристиками в соответствии с EU MEPS», каталог ABB, октябрь 2014 г.
- «Редкие земли», S. Геологическая служба, сводки по минеральным товарам, январь 2016 г.
- Гульельми, Б. Боаццо, Э. Армандо, Г. Пеллегрино и А. Вагати, «Минимизация магнита в конструкции двигателя IPM-PMASR для применения в широком диапазоне скоростей», 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, 2011, стр. 4201-4207.
- «Технологии двигателей для повышения эффективности в приложениях — обзор тенденций и приложений», Danfoss Power Electronics — приводы Danfoss VLT PE-MSMBM, ноябрь 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Самоидентификация характеристик потока в состоянии покоя для синхронных реактивных машин с использованием новой функции аппроксимации насыщения и множественной линейной регрессии», в IEEE Transactions on Industry Applications, vol. 52, нет. 4, стр. 3083-3092, июль-август. 2016.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Самостоятельный ввод в эксплуатацию компенсации времени простоя инвертора с помощью множественной линейной регрессии на основе физической модели», Конгресс и выставка по преобразованию энергии IEEE (ECCE), 2014 г. , том., №, стр. 242-249, 14-18 сентября 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Аналитический расчет контура регулирования напряжения с ослаблением потока в приводах IPMSM», Конгресс и выставка IEEE по преобразованию энергии (ECCE), 2015 г., том, №, стр. 6145-6152, 20-24 сентября 2015 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Проблемы проектирования и анализ ошибок оценки наблюдателя положения и скорости на основе противо-ЭДС для синхронных двигателей SPM», в IEEE Journal of Emerging and Selected Topics in Power Electronics, vol.2, № 2, стр. 159-170, июнь 2014 г.
- S.A. Odhano, P. Giangrande, RI Bojoi и C. Gerada, «Самостоятельный ввод в эксплуатацию внутренних синхронных двигателей с постоянными магнитами и высокочастотной подачей тока», в IEEE Transactions on Industry Applications, vol. 50, нет. 5, стр. 3295-3303, сент.-окт. 2014.
- Велин, К.-Дж. Фриман, «Новая система прямого привода открывает новую эру для бумагоделательных машин», Paper and Timber, Vol.


 , том., №, стр. 242-249, 14-18 сентября 2014 г.
, том., №, стр. 242-249, 14-18 сентября 2014 г.