Синхронный реактивный двигатель
Дмитрий Левкин
Синхронный реактивный электродвигатель — синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов [1].
Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.
Синхронный реактивный двигатель
Статор синхронного реактивного электродвигателя с распределенной обмоткой
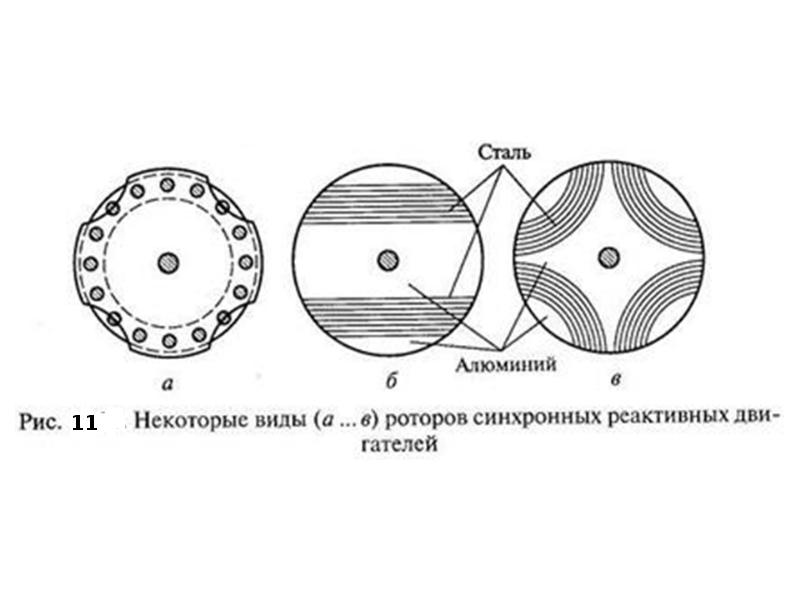
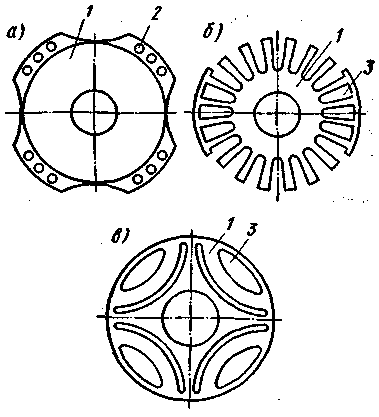
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
Ротор с явновыраженными полюсами
Аксиально-расслоенный ротор
Поперечно-расслоенный ротор
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.
Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.
Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект «a» состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту «a», создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «a» не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q (). Если угол сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля.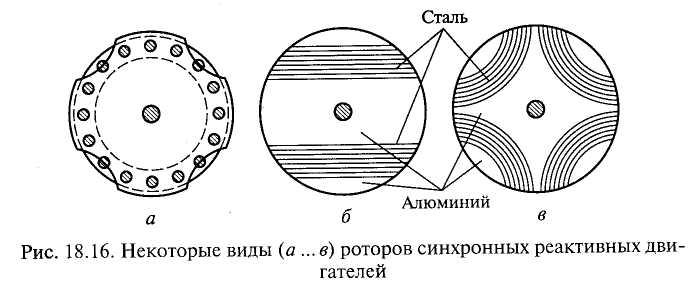 Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.
Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.
- Преимущества:
- Простая и надежная конструкция ротора:
ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Низкий нагрев:
так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя. - Нет магнитов:
снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя. - Низкий момент инерции ротора:
так как на роторе отсутствует обмотка и магниты, момент инерции ротора ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию.
- Возможность регулирования скорости:
в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.
- Недостатки:
- Частотное управление:
для работы требуется частотный преобразователь. - Низкий коэффициент мощности:
из-за того, что магнитный поток создается только за счет реактивного тока. Решается за счет использования частотного преобразователя с коррекцией мощности.
Смотрите также
Синхронные реактивные двигатели
Синхронный реактивный электродвигатель — синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов.
Принцип работы синхронного реактивного двигателя
В синхронных реактивных электродвигателях принцип создания момента вращения ротора несколько отличается от асинхронных и традиционных синхронных двигателей.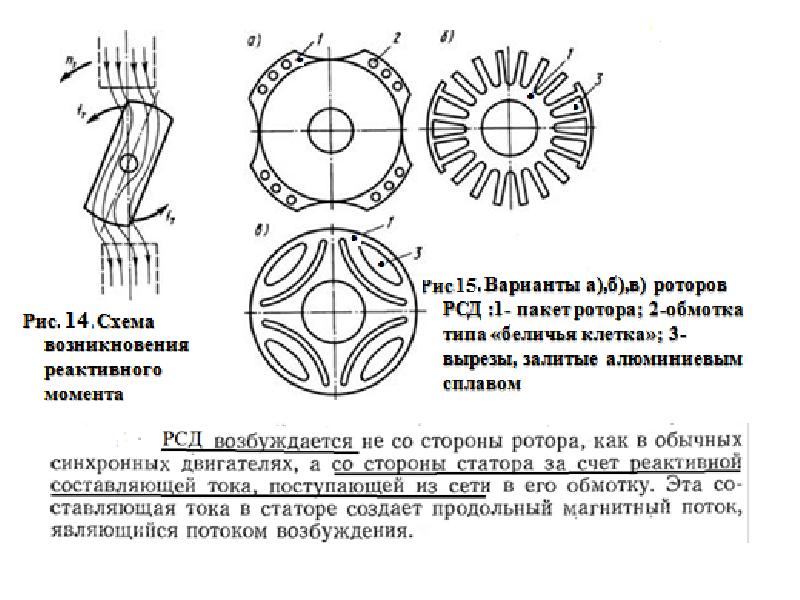 Здесь решающая роль отводится самому сердечнику ротора.
Здесь решающая роль отводится самому сердечнику ротора.
Ротор реактивного синхронного двигателя не имеет обмоток, даже короткозамкнутой обмотки на нем нет. Вместо этого сердечник ротора сделан сильно неоднородным по магнитной проводимости: магнитная проводимость вдоль ротора отличается от магнитной проводимости поперек. Благодаря такому необычному подходу отпадает необходимость как в обмотках ротора, так и в постоянных магнитах на нем.
Что касается статора, то обмотка статора реактивного синхронного двигателя может быть сосредоточенной либо распределенной, при этом сердечник статора и корпус остаются обычными. Вся особенность — в сильно неоднородном сердечнике ротора.
Для реактивных синхронных двигателей характерны три основных типа роторов: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор.
Физика процесса следующая. Переменный ток подается на обмотки статора, и создает вокруг ротора вращающееся магнитное поле, которое максимально в воздушном зазоре между статором и ротором.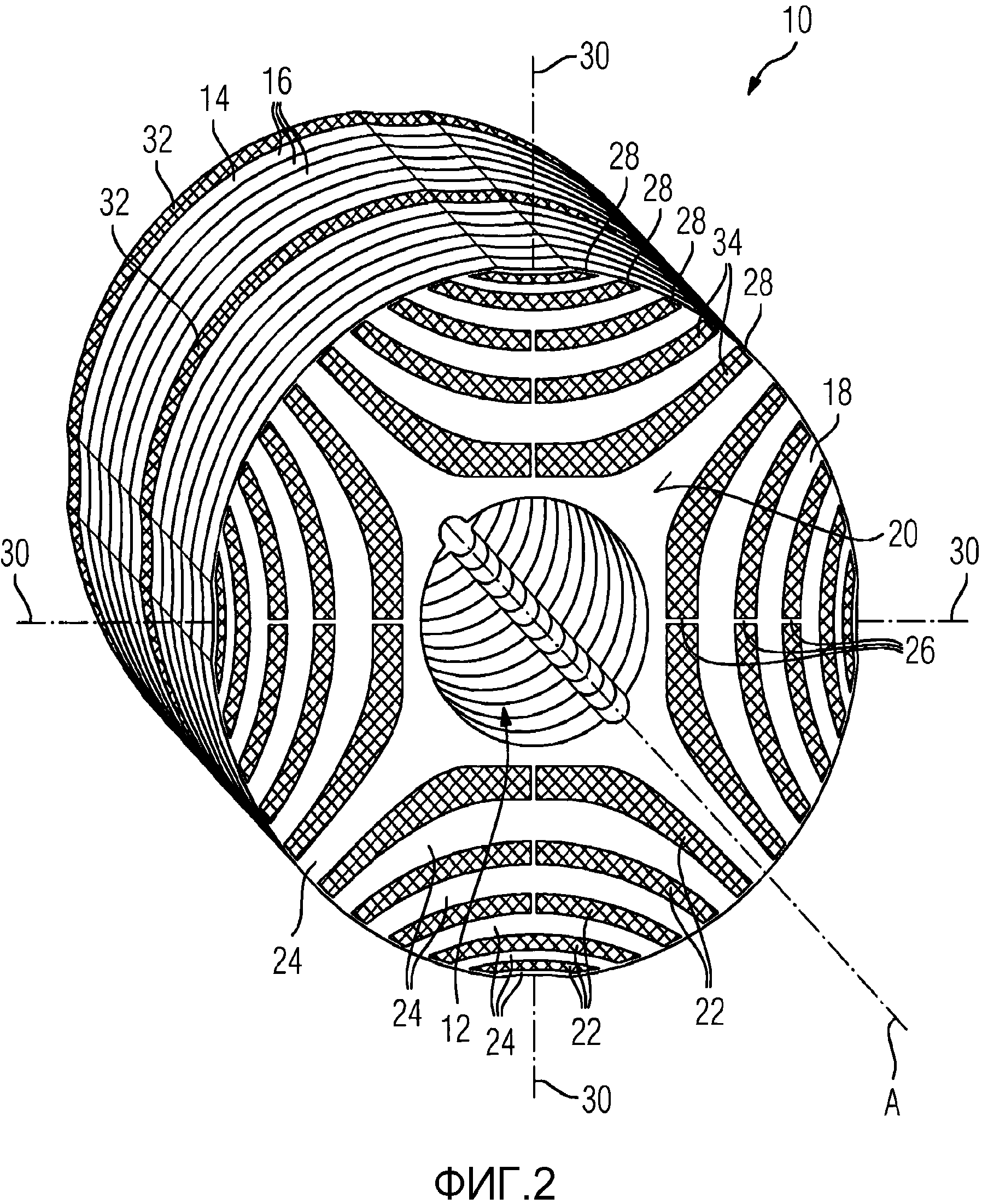 Момент вращения получается благодаря тому, что ротор все время пытается повернуться так, чтобы магнитное сопротивление для формируемого статором магнитного потока оказалось бы минимальным.
Момент вращения получается благодаря тому, что ротор все время пытается повернуться так, чтобы магнитное сопротивление для формируемого статором магнитного потока оказалось бы минимальным.
Максимальный момент вращения оказывается прямо пропорциональным разнице между продольной и поперечной индуктивностями, и чем больше эта разница, тем большим получается вращающий момент ротора.
Для понимания данного принципа обратимся к рисунку. Анизотропный объект 1 обладает различной магнитной проводимостью по осям a и b. При этом изотропный объект 2 обладает одинаковой магнитной проводимостью по всем направлениям. Приложенное к объекту 1 магнитное поле порождает момент вращения когда угол между осью b и линиями магнитной индукции B не равен нулю. Когда неравный нулю угол существует, объект 1 станет искажать приложенное магнитное поле B, и направление искажения будет совпадать с осью a объекта 1.
Синусоидальное магнитное поле, создаваемое в синхронном реактивном двигателе обмоткой статора, вращается с определенной синхронной угловой частотой, и следовательно всегда будет иметь место момент вращения, стремящийся вернуть систему в состояние с наименьшим значением полной потенциальной энергии.
То есть момент вращения будет все время стремиться уменьшить искажение магнитного поля статора в направлении оси a, путем уменьшения угла между линиями индукции B и осью b. Так, если управление двигателем направлено на сохранение постоянства этого угла, то и механическая энергия постоянно будет получаться из электромагнитной.
Таким образом, ток обмотки статора обеспечивает намагничивание с существованием вращающего момента, направленного на устранение искаженности поля, и управляя фазой тока в соответствии с положением ротора во вращающейся системе координат (в соответствии со значением угла искажений), получается управление моментом синхронного реактивного электродвигателя.
Синхронные реактивные электродвигатели сегодня
Ведущие мировые производители электродвигателей на сегодняшний день проявляют особый интерес к синхронным реактивным электродвигателям, хотя запатентованы первые версии были еще в конце 19 века. Дело в том, что КПД синхронных реактивных электродвигателей принципиально значительно превышает КПД популярных асинхронных электродвигателей, не говоря уже об удельной мощности.
Потери энергии в роторе отсутствуют, а ведь обычно процентов 30 потерь приходится именно на ротор. Так повышается и срок службы электродвигателя — снижается вредный нагрев. Масса синхронного реактивного электродвигателя и его габариты на 20% меньше чем у асинхронного той же мощности.
Возобновленный интерес к синхронным реактивным электродвигателям в наши дни связан прежде всего с широкими возможностями современного компьютерного моделирования, позволяющими находить наиболее эффективные версии конструкций роторов и статоров — научные исследования получаются более продуктивными, и КПД современных версий синхронных реактивных двигателей уже достигает 98%, в то время как для асинхронных версий КПД традиционно не превышает 90%.
Синхронные реактивные двигатели изготавливают сегодня на базе асинхронных, и при тех же габаритах и установочно-присоединительных размерах получается более высокий КПД, достигается более высокая удельная мощность.
Преимущества и недостатки
Набранный из тонколистовой электротехнической стали, ротор реактивного синхронного двигателя имеет простую и надежную конструкцию без короткозамкнутой обмотки и без магнитов, поэтому в роторе исключены токи вызывающие вредный нагрев, — срок службы повышается, а отсутствие магнитов удешевляет себестоимость продукта, включая до минимума сниженные затраты на техобслуживание.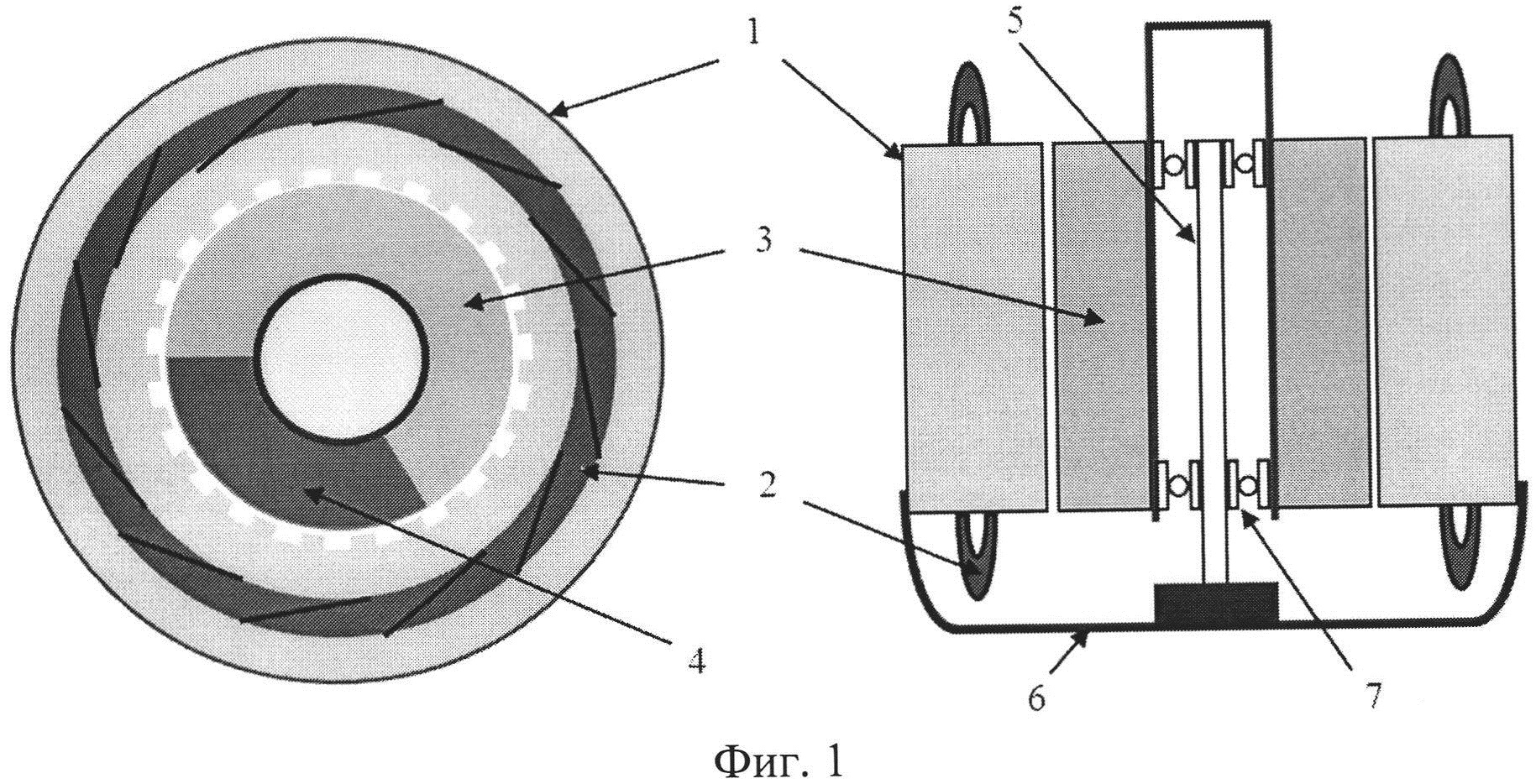
Благодаря сравнительной легкости ротора, его собственный момент инерции низок, поэтому двигатель быстрее разгоняется до номинальных оборотов, что приводит к экономии электроэнергии.
Частотный преобразователь в качестве регулятора скорости делает управление двигателем очень гибким в широком диапазоне рабочих скоростей. Что касается недостатков, то он всего один: потребность в преобразователе частоты.
Применение преобразователя частоты с активной коррекцией коэффициента мощности позволяет добиться максимального коэффициента мощности системы, что очень важно на любом современном производстве.
Ранее ЭлектроВести писали, что калифорнийская компания HyPoint утверждает, что ее новая конструкция топливного элемента с турбонаддувом позволяет в три раза увеличить мощность и в четыре раза срок службы обычного топливного элемента, открывая возможность создания высокоскоростных дальнемагистральных электрических самолетов VTOL с водородным двигателем. Плотность энергии новой системы в 3 раза выше, чем у литий-ионных аккумуляторов.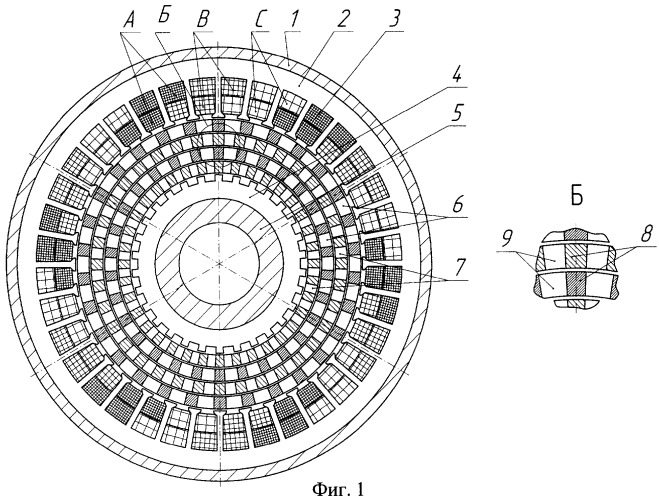
По материалам: electrik.info.
В НИПТИЭМ разработаны современные синхронно-реактивные электродвигатели
следующая новость >
В НИПТИЭМ разработаны современные синхронно-реактивные электродвигатели
Во владимирском ПАО «НИПТИЭМ» созданы синхронно-реактивные электродвигатели, не имеющие аналогов в России. Большая научно-исследовательская работа, проведенная сотрудниками института, завершилась созданием методики проектирования для таких электрических машин (их еще называют синхронными электродвигателями с анизотропной магнитной проводимостью ротора), а также изготовлением действующих образцов.
Вслед за мировыми лидерами электротехники — компаниями ABB и KSB — НИПТИЭМ, входящий в состав российского электротехнического концерна «Русэлпром», готов приступить к расширению линейки типоразмеров новых двигателей (от пяти уже разработанных до трех десятков возможных) и продолжает совершенствовать их технические характеристики.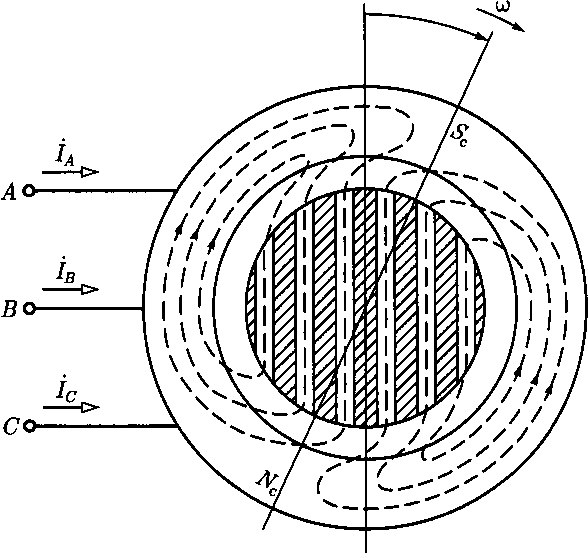
Как отметил один из разработчиков, ведущий научный сотрудник ПАО «НИПТИЭМ» Алексей Захаров, интерес к синхронно-реактивным электрическим машинам вызван, прежде всего, их более высокими, чем у классических асинхронных двигателей, показателями — коэффициентом полезного действия, удельной мощностью.
Ротор такой машины не имеет ни обмотки, ни магнитов и выполнен из листов специальной формы, что значительно упрощает конструкцию. Высокая эффективность работы синхронно-реактивного двигателя обусловлена отсутствием в роторе энергетических потерь, которые составляют до 30% от всех потерь энергии в машине. Это, в свою очередь, увеличивает гарантированный срок службы электродвигателя, повышает его эффективность. Высокий КПД позволяет добиться сокращения объема потребляемой энергии, а значит, и снижения стоимости владения. Уменьшение на 20 процентов массы и габаритов двигателя относительно такого же, но асинхронного, соответственно влияет на его цену.
Предшественниками сегодняшней новации являются синхронно-реактивные двигатели, впервые запатентованные в конце XIX — начале XX веков. Вторая волна интереса к таким электрическим машинам поднялась на рубеже нового тысячелетия. НИПТИЭМ начал проводить научные исследования и разработки в этом направлении одним из первых в стране.
Вторая волна интереса к таким электрическим машинам поднялась на рубеже нового тысячелетия. НИПТИЭМ начал проводить научные исследования и разработки в этом направлении одним из первых в стране.
Синхронные реактивные двигатели (СРД)
Синхронные реактивные двигатели (СРД) изготавливаются на базе асинхронных электродвигателей, в тех же габаритах и с теми же установочно-присоединительными размерами. По сравнению с асинхронными электродвигателями, СРД имеют более высокий КПД. СРД оснащаются датчиком положения ротора для работы с преобразователем частоты. По требованию заказчика, для возможности прямого пуска от сети, СРД может быть оснащен пусковой обмоткой. СРД могут успешно применяться для механизмов, имеющих вентиляторный тип нагрузки, например, для привода вентиляторов, насосов и компрессоров и т.д., где не требуется высокий пусковой момент.
Обозначение:
СРД ААА / В
СРД – синхронный реактивный двигатель;
ААА — высота оси вращения, мм;
В — число пар полюсов (2р).
Примечание: * — для двигателей с пусковой обмоткой при пуске от сети.
По требованию заказчика могут быть изготовлены СРД габаритов высоты оси вращения от 160 мм до 315 мм включительно с числом пар полюсов 2р= 4, 6 с частотой вращения 3000 мин-1, 1500 мин-1, 1000 мин-1.
Высокая эффективность этих двигателей позволяет изготавливать их на ступень выше по мощности или более высоким КПД по сравнению с асинхронными электродвигателями.
Дополнительную информацию можно получить по телефону +7 (4922) 33-13-37.
Синхронный реактивный двигатель | Энерговектор
Возможно, название этой статьи кого-то наведёт на мысль, что речь пойдёт об электрическом реактивном двигателе для космических кораблей. Однако всё гораздо прозаичнее: СРД — это один из видов синхронных электродвигателей, и слово «реактивный» в его наименовании означает не вид тяги, а принцип приведения ротора во вращение. Более точно его описывает англоязычное название synchronous reluctance machine (одно из значений слова reluctance — «магнитное сопротивление»).
Известно множество разновидностей электрических двигателей, включая асинхронные (АД), синхронные (СД), шаговые, двигатели постоянного тока. Все они представляют собой электромеханические преобразователи, то есть преобразователи электрической энергии в механическую.
А теперь представьте себе АД с максимально простой конструкцией ротора — это и будет СРД. Подобные электрические машины появились несколько десятилетий назад, но только недавно привлекли внимание производителей двигателей, а также инжиниринговых компаний по всему миру.
Если раньше в электроприводе важно было обеспечить должный крутящий момент или оптимальный размер оборудования, то теперь на первый план вышла энергоэффективность. В СРД реактивная сила возникает в результате изменения магнитного сопротивления, и их производители ради повышения энергоэффективности применили роторные элементы специальной конструкции, управляющие силовыми линиями магнитного поля.
ПРИНЦИП ПРОСТ
Согласно определению, содержащемуся в ГОСТе от 1987 года, СРД — это синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по разным осям ротора, не имеющего обмоток возбуждения или постоянных магнитов. В данном случае под осями понимаются линии симметрии ротора на его поперечном разрезе (см. схему).
Переменный ток, проходящий по обмоткам статора, создаёт в воздушном зазоре внутри электродвигателя вращающееся магнитное поле. Крутящий момент возникает, поскольку ротор пытается линию с наименьшей магнитной проводимостью (ось d) совместить с вектором приложенного к нему поля, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Глядя на схему как на векторную диаграмму, можно сказать, что величина магнитного потока статора отражается на оси d, тогда как электрический ток, отвечающий за вращающий момент, — на оси q.
Конструкторы подобных роторов обеспечили различие между магнитными сопротивлениями по разным осям за счёт воздушных зазоров. Значение вращающего момента здесь прямо пропорционально разнице индуктивностей обмоток статора, ориентированных вдоль осей d и q.
ПО ПУТИ К СОВЕРШЕНСТВУ
СРД прошли впечатляющий эволюционный путь. Первые образцы развивали меньший вращающий момент, чем синхронные машины с обмоткой возбуждения, а также имели невысокие КПД и коэффициент мощности. Это объяснялось тем, что возбуждение обуславливалось реактивной составляющей тока, которая имела большую величину. Для пуска таких двигателей применяли демпфирующую короткозамкнутую обмотку, переводя их на время пуска в асинхронный режим.
Характеристики СРД резко повысились после появления специальных преобразователей частоты (ПЧ). В них питающее напряжение развязано от сети и заложен алгоритм пуска (управление током намагничивания Id статора и током статора, отвечающим за крутящий момент, — Iq), исключающий необходимость в асинхронном разгоне.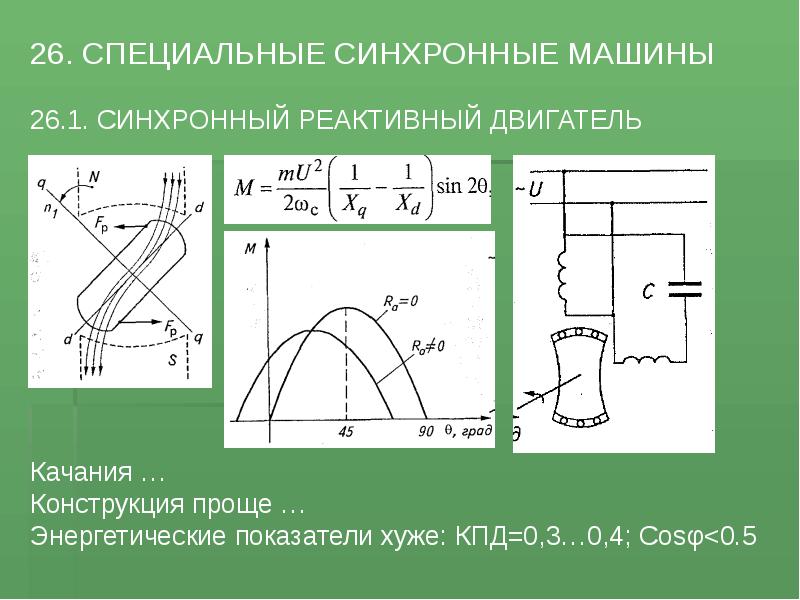 Во время работы СРД программа контроллера ПЧ постоянно корректирует выходной ток, поддерживая наиболее благоприятные режимы. Положение ротора отслеживается без применения встроенных датчиков — по потребляемому двигателем току.
Во время работы СРД программа контроллера ПЧ постоянно корректирует выходной ток, поддерживая наиболее благоприятные режимы. Положение ротора отслеживается без применения встроенных датчиков — по потребляемому двигателем току.
После внедрения ПЧ коэффициент мощности и КПД синхронных реактивных двигателей заметно увеличились, а конструкция ротора максимально упростилась. В целом можно сказать, что в силу своего принципа действия СРД имеет худший на 5-10% коэффициент мощности, чем АД, но зато на 5-8% выигрывает в КПД — как в номинальном режиме, так и при работе на пониженных скоростях во всём допустимом их диапазоне.
Статор СРД идентичен статору широко используемого асинхронного двигателя. Его обмотка может быть распределённой или сосредоточенной. А ротор представляет собой вал с болванкой из шихтованной стали — на нём вы не найдёте ни обмоток, ни постоянных магнитов. Роторы бывают трёх основных видов: аксиально расслоённые, поперечно расслоённые и с явно выраженными полюсами (см.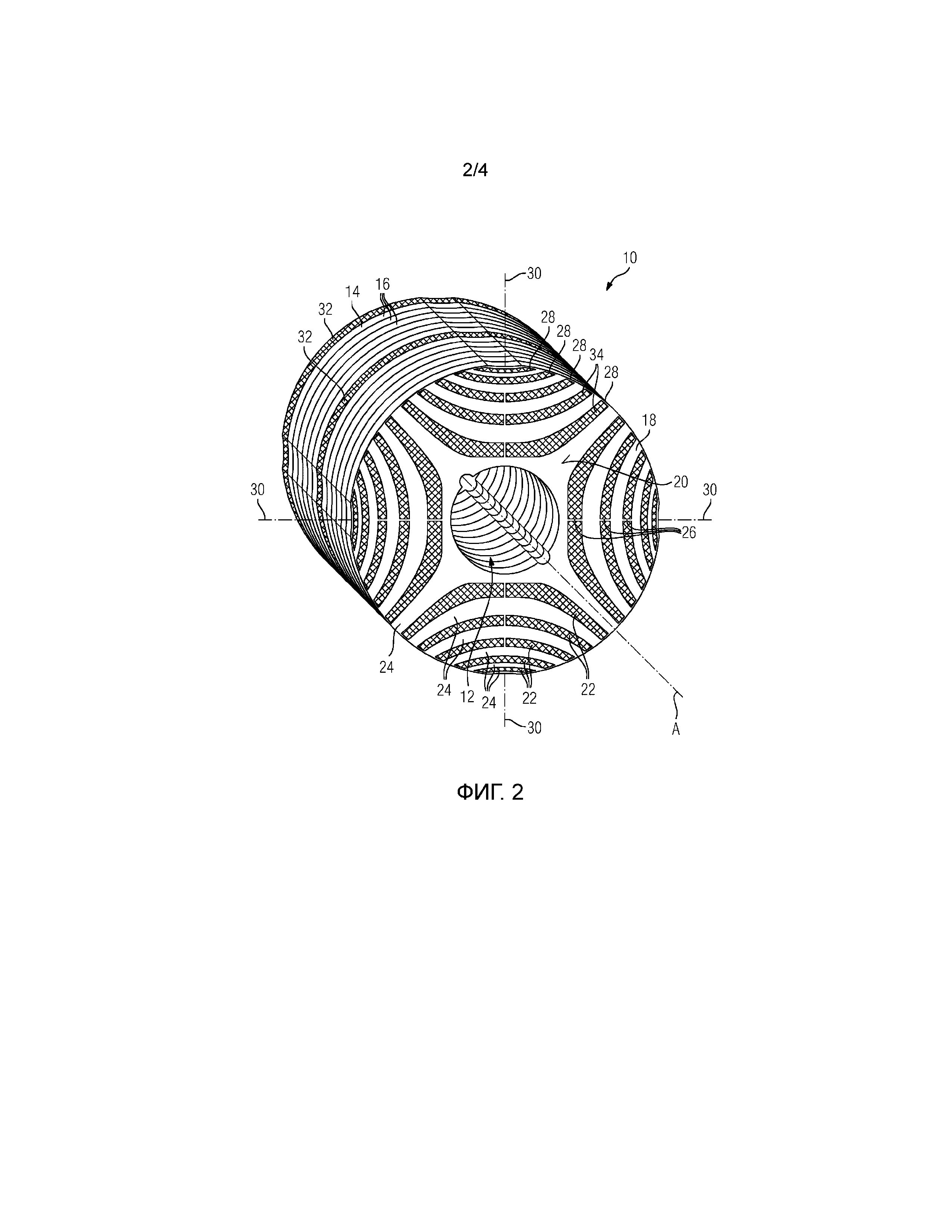 рисунок).
рисунок).
ТИХОХОДЫ ПО ПРИРОДЕ
Отметим, что СРД демонстрируют высокие энергетические показатели тогда, когда магнитопровод работает в зоне насыщения. В случае повышенных оборотов контроллер должен уменьшить ток намагничивания Id, в результате чего заметно падает вращающий момент двигателя. А поскольку реактивный ток сохраняется на высоком уровне, резко снижается коэффициент мощности. Поэтому там, где требуются повышенные скорости работы, синхронные реактивные двигатели использовать не стоит.
Назовём достоинства СРД.
1. Простота и надёжность ротора, состоящего из тонколистовой электротехнической стали.
2. Низкий нагрев. Так как в роторе нет обмоток, через него не протекает активный ток. Это положительно сказывается на сроке жизни подшипников и на КПД. Поскольку снижаются потери на нагрев, номинальный ток двигателя может быть повышен, что позволяет получить (при той же мощности) более высокий (на 20-40%) вращающий момент, чем у АД.
3. Отсутствие магнитов. Таким образом, для производства двигателя не требуются редкоземельные металлы и, следовательно, его стоимость снижается.
4. Низкий момент инерции ротора, который представляет собой болванку без магнитов и обмоток.
5. Меньшие габариты по сравнению с АД при той же мощности.
6. Высокие КПД и cos(φ), достигаемые с помощью специализированного интеллектуального преобразователя частоты.
7. Абсолютно жёсткая механическая характеристика в разомкнутой системе. Это значит, что двигатель способен поддерживать скорость на заданном уровне с большой точностью до тех пор, пока вращающий момент не превысит максимального значения.
Недостатки же СРД таковы.
1. Пуск и работа возможны только с преобразователем частоты, который увеличивает стоимость системы и занимает место.
2. Падение эффективности на повышенных оборотах.
Синхронные реактивные двигатели перспективны для применения при разработке новых и модернизации старых систем электропривода.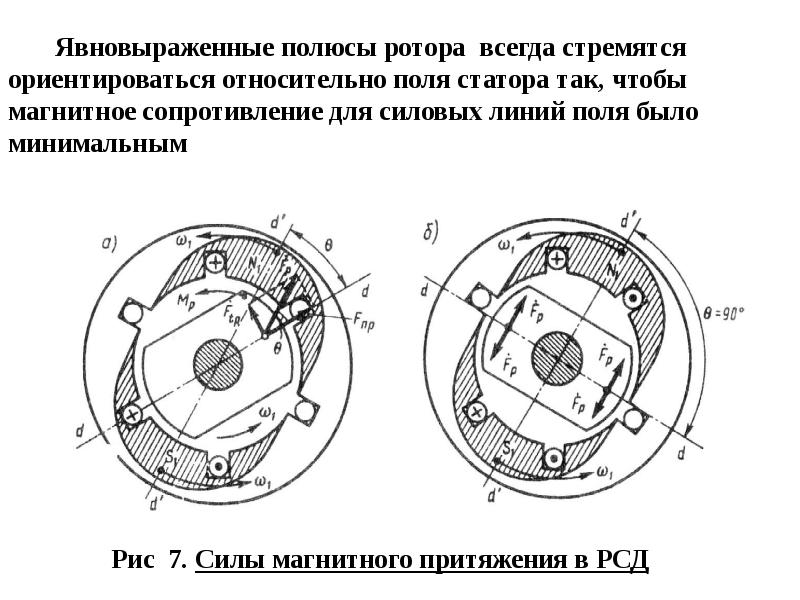 Больший КПД во всем диапазоне скоростей в сравнении с АД и СД с постоянными магнитами дает им преимущество при выборе двигателей для новых систем, соответствующих международным стандартам энергоэффективности IE4 и IE5. Благодаря простоте конструкции ротора и проверенной технологии изготовления статора такие двигатели найдут применение в насосных агрегатах и вентиляторах, а также в различных других системах с постоянным моментом вращения и регулированием скорости вниз от номинала.
Больший КПД во всем диапазоне скоростей в сравнении с АД и СД с постоянными магнитами дает им преимущество при выборе двигателей для новых систем, соответствующих международным стандартам энергоэффективности IE4 и IE5. Благодаря простоте конструкции ротора и проверенной технологии изготовления статора такие двигатели найдут применение в насосных агрегатах и вентиляторах, а также в различных других системах с постоянным моментом вращения и регулированием скорости вниз от номинала.
__________________________________
Еще больше интересных материалов ищите на нашем портале energovector.com или подписывайтесь на наш канал.
Синхронные реактивные двигатели
Содержание:
Синхронные реактивные двигатели
Синхронные реактивные двигатели. Трехфазный реактивный двигатель. Под реактивным двигателем понимается синхронный двигатель с разными полюсами на роторе без обмотки возбуждения (и постоянных магнитов).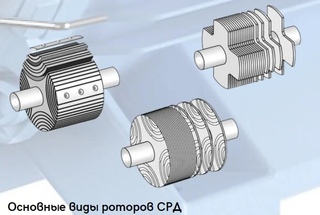 Магнитные требуется чтобы забронировать в нем создается только N. s статора. Простота конструкции, низкая цена, только для 1 потребности Популярны мощные, маломощные реактивные двигатели. Конструкция трехфазного реактивного двигателя практически совпадает с конструкцией асинхронного сепараторного Ротора. Ротор имеет отдельное устройство. Наиболее распространенная конструкция отличается от сепараторных роторов обычных асинхронных двигателей только тем, что на цилиндрической поверхности имеются углубления (выемки), в которых образуется выступающий полюс(рис.14.9, а).
Магнитные требуется чтобы забронировать в нем создается только N. s статора. Простота конструкции, низкая цена, только для 1 потребности Популярны мощные, маломощные реактивные двигатели. Конструкция трехфазного реактивного двигателя практически совпадает с конструкцией асинхронного сепараторного Ротора. Ротор имеет отдельное устройство. Наиболее распространенная конструкция отличается от сепараторных роторов обычных асинхронных двигателей только тем, что на цилиндрической поверхности имеются углубления (выемки), в которых образуется выступающий полюс(рис.14.9, а).
Его статор похож на статор обычного асинхронного двигателя.
Людмила Фирмаль
- Ротор, показанный на рисунке 14.9.6, VL, представляет собой цилиндр, в котором стальная полоса, отлитая из алюминия, образует отдельный полюс, поскольку он is. By реализуя такой Ротор из материала с различными магнитными свойствами, достигается дисбаланс магнитной проводимости вдоль продольной и поперечной осей машины. Это необходимо для создания недопустимого момента. Реактивный двигатель не имеет пускового момента. Поплавок асинхронно. Величина пускового асинхронного момента Mp зависит от пусковой короткозамкнутой обмотки конструкции, показанной на фиг. 1, или активного сопротивления корпуса большого алюминиевого Ротора. 14.9, б, в Кроме стартового двигателя, качество работы реактивного двигателя определяется моментом, когда он входит в синхронизацию l1bx и выходит оттуда из синхронизации A1B(рис. 14.10). РПС. 10/14.Механические свойства реактивных двигателей.
 Это необходимо для создания недопустимого момента. Реактивный двигатель не имеет пускового момента. Поплавок асинхронно. Величина пускового асинхронного момента Mp зависит от пусковой короткозамкнутой обмотки конструкции, показанной на фиг. 1, или активного сопротивления корпуса большого алюминиевого Ротора. 14.9, б, в Кроме стартового двигателя, качество работы реактивного двигателя определяется моментом, когда он входит в синхронизацию l1bx и выходит оттуда из синхронизации A1B(рис. 14.10). РПС. 10/14.Механические свойства реактивных двигателей.
Это необходимо для создания недопустимого момента. Реактивный двигатель не имеет пускового момента. Поплавок асинхронно. Величина пускового асинхронного момента Mp зависит от пусковой короткозамкнутой обмотки конструкции, показанной на фиг. 1, или активного сопротивления корпуса большого алюминиевого Ротора. 14.9, б, в Кроме стартового двигателя, качество работы реактивного двигателя определяется моментом, когда он входит в синхронизацию l1bx и выходит оттуда из синхронизации A1B(рис. 14.10). РПС. 10/14.Механические свойства реактивных двигателей.Впускной момент Мвх-это максимальный момент сопротивления, когда двигатель все еще синхронизирован. Величина Mvh зависит от максимальной частоты вращения, при которой двигатель будет работать в асинхронном (пусковом) режиме при заданном моменте сопротивления в валу, величины момента реакции при заданной частоте вращения и момента инерции вращающейся детали. Момент несинхронизации-это максимальный недопустимый момент, который может возникнуть у двигателя во время синхронизированного вращения.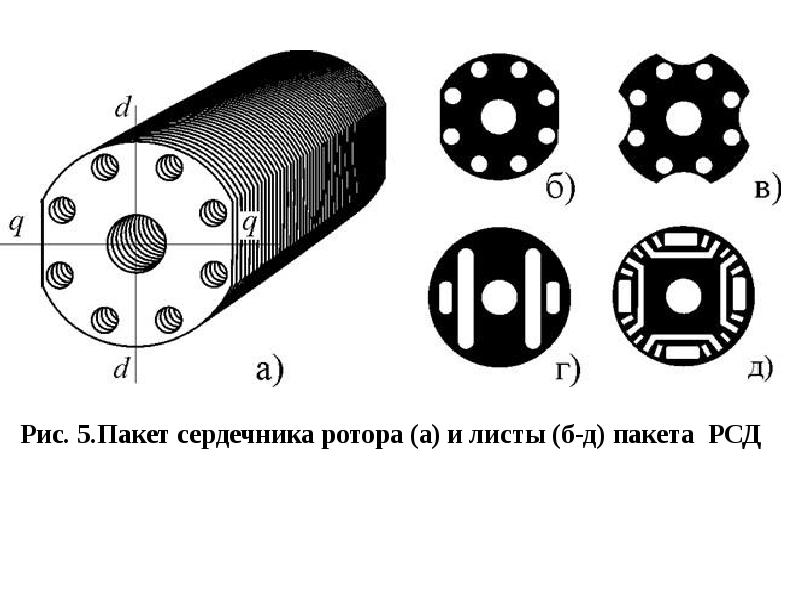 Только реактивный момент действует на ротор, вращающийся с синхронной скоростью. Его сущность описана в 14.2.Значение недопустимого момента задается в выражении (14.6).Это значение было получено путем игнорирования активного сопротивления обмотки статора. Однако в маломощном двигателе это сопротивление очень велико и влияет на характер зависимости Mp = /(0).
Только реактивный момент действует на ротор, вращающийся с синхронной скоростью. Его сущность описана в 14.2.Значение недопустимого момента задается в выражении (14.6).Это значение было получено путем игнорирования активного сопротивления обмотки статора. Однако в маломощном двигателе это сопротивление очень велико и влияет на характер зависимости Mp = /(0).
Курсовая электрические машины
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
- Величина A4m уменьшается и смещается на небольшой угол 30-40, который равен 0. Анализ уравнения (14.6) показывает, что недопустимым моментом (включая MVOh) является разность магнитного сопротивления/?М /? Видно, что она пропорциональна тому, что было установлено экспериментально, что максимальный недопустимый момент при относительно небольшом расходе энергии в двигателе получается при следующем соотношении основных габаритов двигателя (рис. −8) Па рисунке 14.11 создается векторная схема реактивного двигателя, соответствующая уравнению (14.8).
 −8) Па рисунке 14.11 создается векторная схема реактивного двигателя, соответствующая уравнению (14.8).
−8) Па рисунке 14.11 создается векторная схема реактивного двигателя, соответствующая уравнению (14.8).Как видно, фазовый угол между напряжениями Увы, ток/относительно велик, а СОСР невелик. Существенным недостатком реактивных двигателей является низкое значение коэффициента мощности из-за большого тока намагничивания в статоре. Еще одним недостатком 1 является низкая эффективность. На двигателе мощностью в несколько десятков ватт она не превышает 30-40%, а от доли 1 ватта до нескольких ватт-всего 5-25%. Синхронные трехфазные реактивные двигатели вырабатывают на валу в 2-3 раза меньше механической мощности, чем асинхронные двигатели тех же габаритов. Конденсаторно-реактивный двигатель.
В отличие от трехфазного конденсаторно-реактивного двигателя, статор проложен с двухфазной обмоткой.
Людмила Фирмаль
- 1 (Основная) из этой фазы непосредственно подключена к однофазной сети, а другая 1 (вспомогательная) подключена к той же сети через конденсатор. Обе фазы электрически смещены на 90 градусов относительно друг друга в пространстве и, как правило, могут иметь разное число витков. Конденсаторные двигатели, работающие в однофазной сети, применяются в схемах автоматики, телемеханики, регистрирующих устройствах, бытовой технике и др. Принцип работы конденсаторно-реактивного двигателя аналогичен принципу работы трехфазной струи. Единственное отличие заключается в том, что при первом вращении ИОЛ в общем случае она овальная, а не круглая. Величина момента: Mn-начало, Mvh-начало синхронизации, M o-конец синхронизации определяется не только параметрами ротора и статора, но и характером.
Синхронный реактивный двигатель с электромагнитной редукцией
Изобретение относится к области электротехники, а точнее к синхронным реактивным двигателям с электромагнитной редукцией.
Известны синхронные реактивные двигатели с электромагнитной редукцией, содержащие зубчатый ротор, статор с полюсами, на внутренней поверхности которых выполнены зубцы, и многофазную обмотку, каждая фаза которой содержит параллельно соединенные между собой полуфазы, смещенные относительно друг друга на 180 электрических градусов и содержат согласно включенные относительно начала этих полуфаз диоды, причем каждая полуфаза состоит из последовательно и согласно соединенных между собой катушек, размещенных на диаметрально расположенных зубчатых полюсах (см.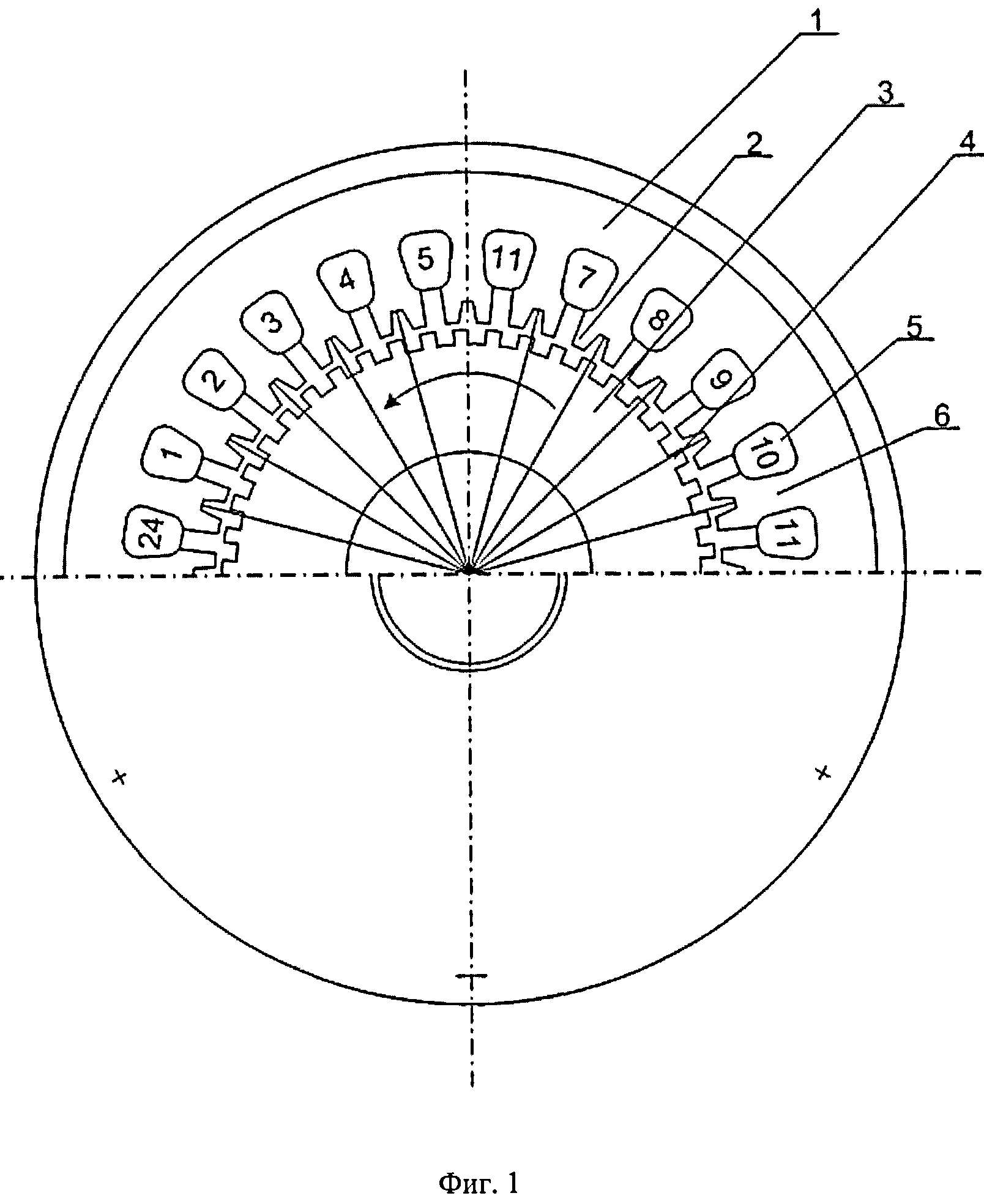 патент Франции №2272519 от 1975 г.).
патент Франции №2272519 от 1975 г.).
В таком синхронном реактивном двигателе за один электрический период питающего напряжения осуществляется поворот ротора только на одно зубцовое деление, что значительно облегчает его запуск по сравнению с известными синхронными реактивными двигателями с поворотом ротора на два зубцовых деления за один электрический период.
Однако, такой двигатель имеет ограниченное применение, т.к. из-за сосредоточенной фазной обмотки он не обеспечивает плавное вращение ротора и поэтому является самозапускающимся только при очень низкой частоте вращения ротора — не превышающей 20-30 об/мин.
Частично указанные недостатки устранены в синхронном реактивном двигателе с электромагнитной редукцией, содержащем зубчатый ротор с числом зубцов zp, зубчатый статор, выполненный с равномерно распределенными по окружности зубцами, число которых zc связано с числом зубцов ротора соотношением zp=zc±p, где p=1, 2, 3… число пар полюсов расположенной в статоре m — фазной обмотки, каждая фаза которой состоит из параллельно соединенных между собой полуфаз, смещенных относительно друг друга на 180 электрических градусов и содержащих согласно включенные относительно начала этих полуфаз диоды, при этом полуфазы в каждой фазе включены относительно друг друга встречно, т. е. конец первой полуфазы соединен с началом второй полуфазы, а конец второй полуфазы соединен с началом первой полуфазы, причем каждая полуфаза состоит из p согласно и последовательно соединенных между собой катушечных групп (см. патент России №2066912 от 1994 г.).
е. конец первой полуфазы соединен с началом второй полуфазы, а конец второй полуфазы соединен с началом первой полуфазы, причем каждая полуфаза состоит из p согласно и последовательно соединенных между собой катушечных групп (см. патент России №2066912 от 1994 г.).
В этом реактивном двигателе, благодаря равномерно распределенным по окружности статора пазам и распределенной фазной обмотке, обеспечивается более плавное вращение ротора, а соответственно более высокие энергетические показатели.
Однако, при выполнении этого реактивного двигателя с частотой вращения ротора превышающей 30-40 об/мин, его запуск от сети остается нестабильным, т.е. зависит от исходного положения зубцов ротора относительно зубцов статора и нагрузки на валу. Кроме того, существенным недостатком такого двигателя при его выполнении с числом зубцов статора более 48 является повышенная трудоемкость при изготовлении обмотки и ее укладке в пазы статора, а также малый коэффициент заполнения объема пазов медью из-за большого числа этих пазов. А из-за низкого Cos φ такой реактивный двигатель уменьшает Cos φ трехфазной сети.
А из-за низкого Cos φ такой реактивный двигатель уменьшает Cos φ трехфазной сети.
Целью данного изобретения является устранение указанных недостатков, т.е. улучшение пусковых свойств синхронного реактивного двигателя с электромагнитной редукцией, повышение коэффициента использования его объема и уменьшение трудоемкости изготовления при большом числе пазов статора.
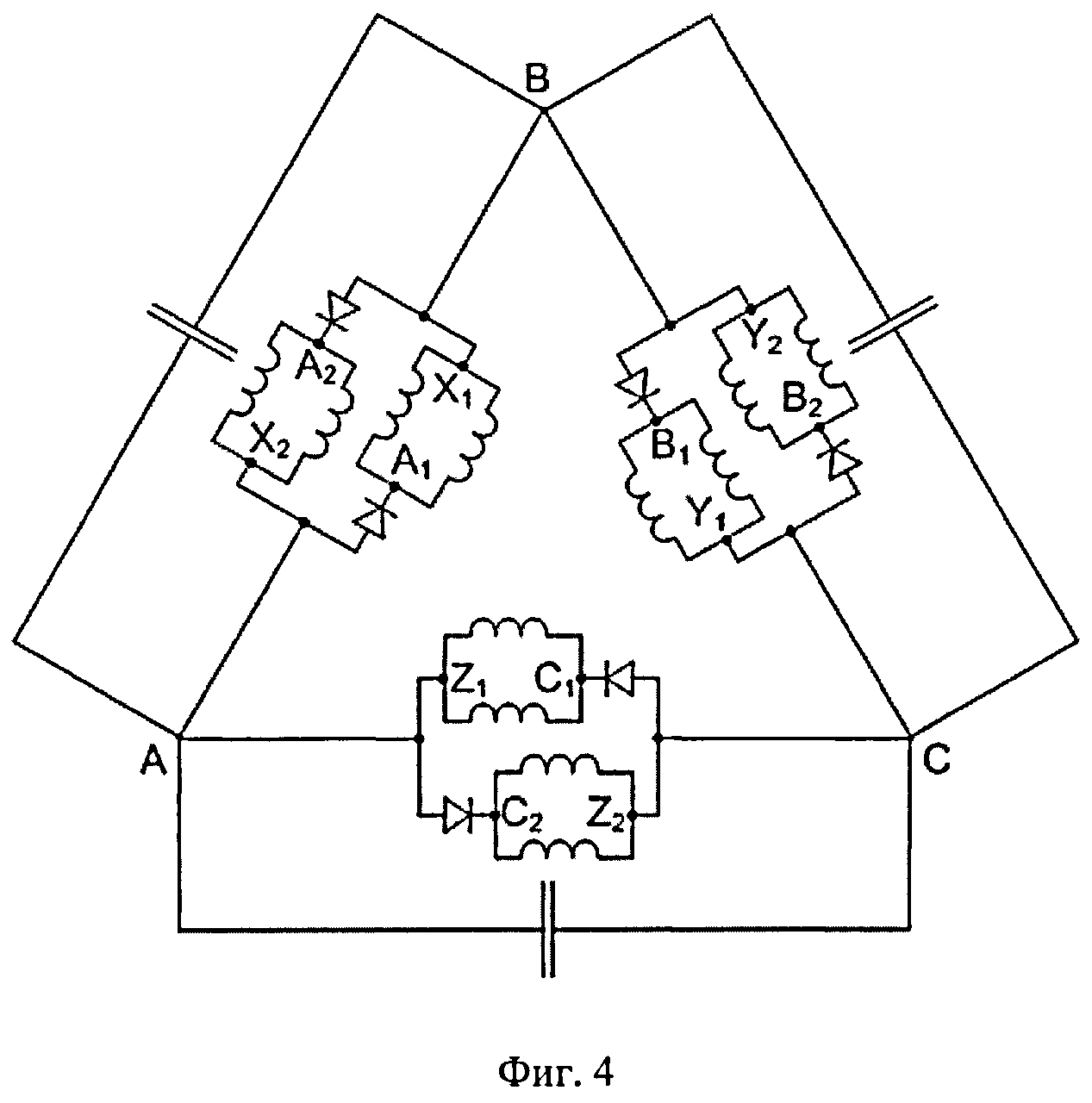
Указанная цель достигается тем, что в синхронном реактивном двигателе с электромагнитной редукцией, содержащем зубчатый ротор с числом зубцов zp, зубчатый статор с равномерно распределенными зубцами zc, число которых связано с числом зубцов ротора zp соотношением zp=zc±р, где p=1, 2, 3… — число пар полюсов расположенной в статоре m — фазной обмотки, каждая фаза которой состоит из параллельно и встречно соединенных между собой полуфаз с согласно включенными относительно начала этих полуфаз диодами, причем эти полуфазы смещены относительно друг друга на 180 электрических градусов, а каждая полуфаза состоит из p согласно соединенных между собой катушечных групп, катушечные группы каждой полуфазы соединены между собой параллельно, число пазов статора zп, в которых размещена m — фазная обмотка, равно zп=zc/k, где k=1, 2, 3…, а к m — фазной обмотке присоединены соответственно m соединенных между собой конденсаторов, при этом при m равном 3, конденсаторы, как и фазные обмотки, соединены между собой по схеме звезда или треугольник.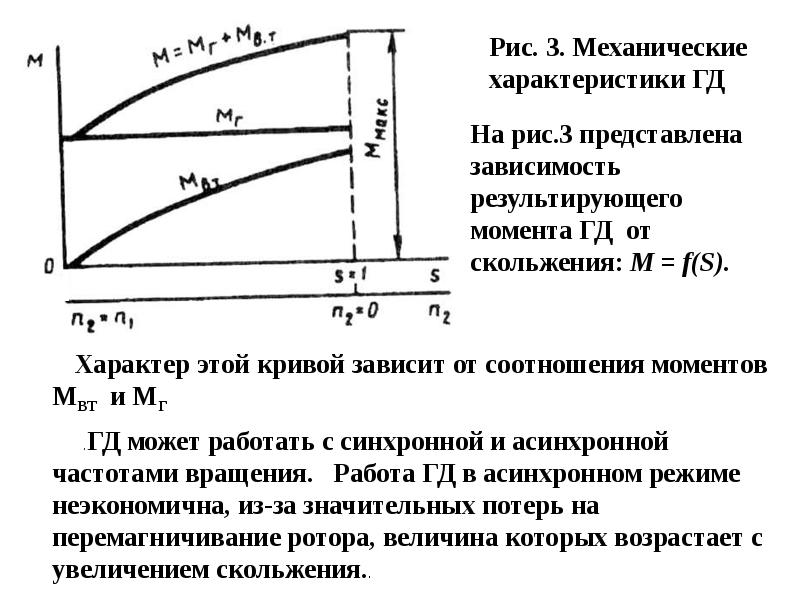
Для упрощения технологии изготовления синхронного реактивного двигателя с большим числом зубцов статора, например, равным или большим 48, k принимается большим 1 и каждый из участков статора, расположенный между соседними пазами с обмоткой, представляет собой зубец с гребенчатой зоной, число зубцов которого равно k, а безобмоточные пазы гребенчатой зоны выполнены с меньшим объемом, чем пазы с обмоткой.
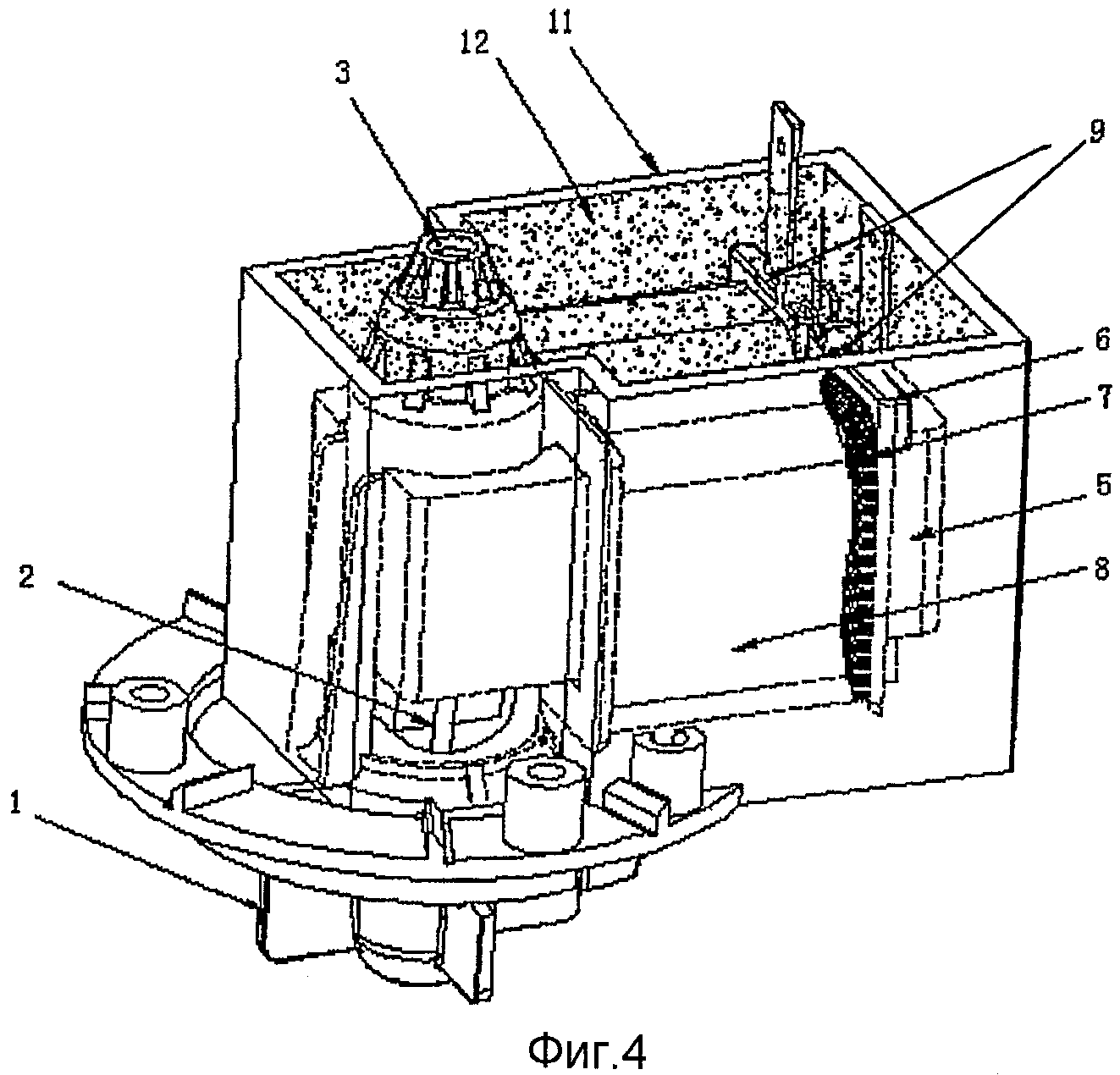
На фиг.1 представлен общий вид реактивного синхронного двигателя с электромагнитной редукцией в разрезе.
Па фиг.2 представлена развернутая схема трехфазной обмотки синхронного реактивного двигателя с электромагнитной редукцией.
Па фиг.3 приведена принципиальная схема трехфазной обмотки двигателя, соединенная по схеме звезда с подключенными к фазам тремя конденсаторами, соединенными между собой по схеме треугольник.
На фиг.4 приведена принципиальная схема трехфазной обмотки двигателя, соединенная по схеме треугольник с подключенными к ней конденсаторами, соединенными между собой также по схеме треугольник.
Предложенный синхронный реактивный двигатель с электромагнитной редукцией содержит: зубчатый статор 1 (см. фиг.1), выполненный из листовой электротехнической стали с равномерно распределенными по окружности зубцами 2, число которых zc равно 48; зубчатый ротор 3, выполненный также из листовой электротехнической стали с равномерно распределенными по окружности зубцами 4, число которых zp определяется из соотношения zp=zc±p=48-2=46, где p — число пар полюсов, расположенной в пазах статора 1 трехфазной обмотки 5, принятое равным 2. Число пазов статора zn в которых размещена трехфазная обмотка, определяется коэффициентом k. Так, при k=2, т.е. числе зубцов в гребенчатой зоне равным 2 (см. фиг.1), число пазов статора, занятых обмоткой zп=zc/2=48/2=24, при этом расположенные между соседними пазами статора с обмоткой участки представляют собой зубцы 6, каждый из которых представляет собой зубец с гребенчатой зоной, содержащей по k=2 зубца, причем пазы гребенчатой зоны выполнены с меньшим объемом паза, чем пазы с обмоткой. Трехфазная обмотка (см. фиг.2) выполнена распределенной, двухслойной, фазы соединены между собой но схеме звезда, число пар полюсов р равно 2 (см. фиг.2). Каждая фаза трехфазной обмотки, например, фаза A-X состоит из двух параллельно и встречно соединенных между собой полуфаз A1-X1 и A2-X2, т.е. конец первой полуфазы X1 соединен с началом второй полуфазы A2, а конец второй полуфазы X2 соединен с началом первой полуфазы A1, причем эти полуфазы смещены относительно друг друга на 180 электрических градусов или 6 зубцовых делений и каждая из полуфаз содержит согласно включенные относительно начала этих полуфаз диоды (см. фиг.2). При этом, каждая из полуфаз состоит из двух параллельно и согласно соединенных между собой катушечных групп (т.к. p — число пар полюсов обмотки равно 2), а каждая катушечная группа содержит две катушки, выполненные с шагом равным полюсному делению τ, которое равно zn/2p=24/4=6 зубцовым делениям статора.
Трехфазная обмотка (см. фиг.2) выполнена распределенной, двухслойной, фазы соединены между собой но схеме звезда, число пар полюсов р равно 2 (см. фиг.2). Каждая фаза трехфазной обмотки, например, фаза A-X состоит из двух параллельно и встречно соединенных между собой полуфаз A1-X1 и A2-X2, т.е. конец первой полуфазы X1 соединен с началом второй полуфазы A2, а конец второй полуфазы X2 соединен с началом первой полуфазы A1, причем эти полуфазы смещены относительно друг друга на 180 электрических градусов или 6 зубцовых делений и каждая из полуфаз содержит согласно включенные относительно начала этих полуфаз диоды (см. фиг.2). При этом, каждая из полуфаз состоит из двух параллельно и согласно соединенных между собой катушечных групп (т.к. p — число пар полюсов обмотки равно 2), а каждая катушечная группа содержит две катушки, выполненные с шагом равным полюсному делению τ, которое равно zn/2p=24/4=6 зубцовым делениям статора.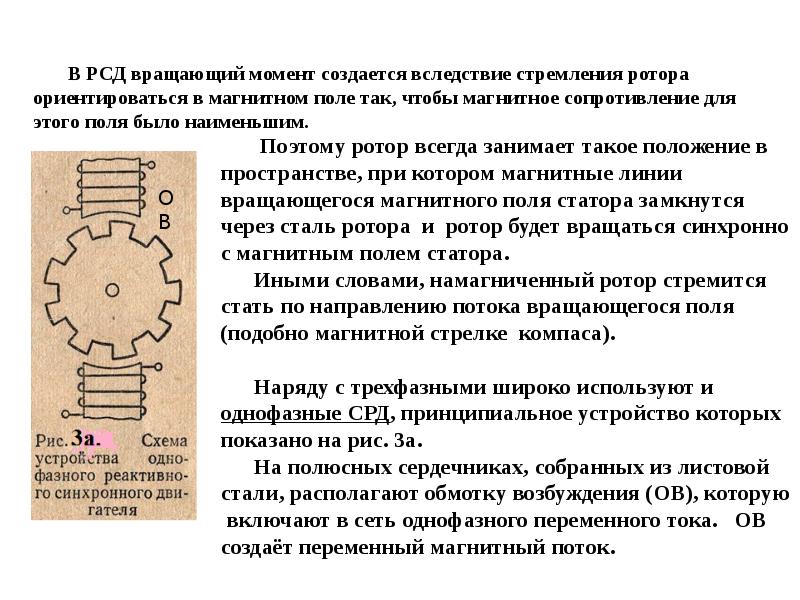 Аналогично выполнены фазы B-Y и C-Z, а концы фаз X, Y, Z соединены между собой согласно схеме звезда. Чтобы не загромождать электрическую схему обмотки двигателя, присоединенные к ней конденсаторы изображены на принципиальной электрической схеме обмотки, представленной на фиг.3.
Аналогично выполнены фазы B-Y и C-Z, а концы фаз X, Y, Z соединены между собой согласно схеме звезда. Чтобы не загромождать электрическую схему обмотки двигателя, присоединенные к ней конденсаторы изображены на принципиальной электрической схеме обмотки, представленной на фиг.3.
Работает предложенный синхронный реактивный двигатель с электромагнитной редукцией следующим образом. При подключении выводных концов A, B, C обмотки 5 к трехфазному напряжению в статоре 1 создается вращающееся магнитное поле, которое взаимодействуя через зубцы 2 статора 1 с зубцами 4 ротора 3, приводит последний во вращение. Частота вращения ротора 3 в об/мин определяется по формуле n=60×f/zp=60×50/46=65,2 об/мин, где: f — частота напряжения трехфазной сети в Гц. На фиг.2 стрелками указано направление тока в полуфазах A1-X1 и C2-Z2 в момент времени, когда амплитуды тока в фазах A и C равны по величине, а в фазе B ток отсутствует. Полуфазы A1-X1 и C2-Z2 смещены относительно друг друга на 60 электрических градусов, что соответствует 30 угловым градусам или двум зубцовым делениям статора 1, поэтому своими катушечными группами они создают результирующую намагничивающую силу в зубцах, расположенных между пазами 3 и 8, а также между пазами 15 и 20. Эти зубцы взаимодействуя с зубцами 4 ротора 3, создают вращающий момент, направление которого указано на фиг.1 стрелкой.
Эти зубцы взаимодействуя с зубцами 4 ротора 3, создают вращающий момент, направление которого указано на фиг.1 стрелкой.
Благодаря параллельному соединению между собой катушечных групп каждой полуфазы, каждая катушка полуфазы выполняется примерно с вдвое большим числом витков, в результате чего индуктивность каждой катушечной группы возрастает в четыре раза, а индуктивность всей полуфазы соответственно в два раза. С увеличением же индуктивности обмотки двигателя уменьшается скорость нарастания в ней тока, в результате чего ток в полуфазе достигает своего номинального значения за большее число электрических полупериодов, что обеспечивает значительное улучшение запуска реактивного двигателя.
Благодаря выполнению статора с числом зубцов в гребенчатой зоне равным например, двум (как изображено на фиг.1), значительно упрощается технология изготовления двигателя с числом зубцов статора равным или большим 48 за счет уменьшения в два раза числа катушек трехфазной обмотки.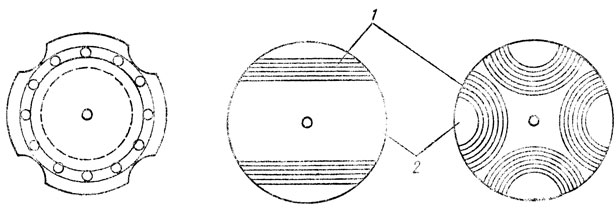 При этом, не менее, чем на 20% возрастает коэффициент использования объема пазов и появляется возможность увеличить число ампер-витков обмотки статора, а соответственно величину вращающего момента на валу двигателя.
При этом, не менее, чем на 20% возрастает коэффициент использования объема пазов и появляется возможность увеличить число ампер-витков обмотки статора, а соответственно величину вращающего момента на валу двигателя.
Для уменьшения потребляемого от трехфазной сети реактивного тока синхронный реактивный двигатель выполнен, как изображено на фиг.3, 4 с тремя конденсаторами, соединенными между собой по схеме треугольник (или звезда) и подключенными к фазной обмотке в местах ее подключения к трехфазной сети.
Синхронный реактивный двигатель может быть выполнен с шагом обмотки большим или меньшим полюсного деления, например, обмотка, представленная на фиг.2, может быть выполнена с шагом 5 или 7 зубцовых делений, а при k равном 1 и zc равном 48 с шагом 11 или 13 зубцовых делений.
Реактивный двигатель средней и большой мощности может быть выполнен с диодом в каждой катушечной группе полуфазы, подключенным аналогично диоду полуфазы.
При двухфазном выполнении реактивного двигателя он может быть подключен к однофазной сети путем последовательно подключенного к одной из его фаз конденсатора.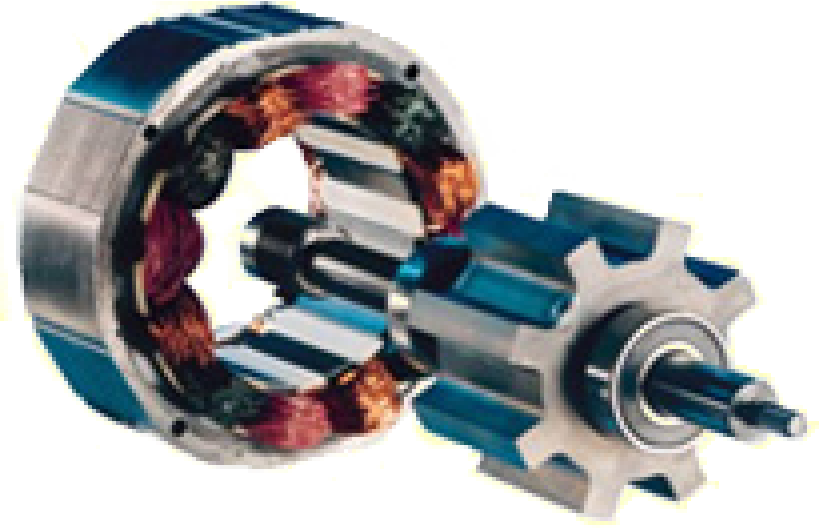
Предложенный синхронный реактивный двигатель с электромагнитной редукцией предполагается патентовать за границей, а также намечается его серийный выпуск.
Китай Индивидуальные синхронные электродвигатели с постоянным магнитом. Поставщики, производители, фабрика — Высокое качество
Синхронный реактивный двигатель с постоянными магнитами — компактная конструкция, легкий вес, высокая удельная мощность и высокий крутящий момент;
Синхронный реактивный двигатель с постоянными магнитами — это синхронный двигатель переменного тока, возбуждение поля которого обеспечивается постоянными магнитами и который имеет синусоидальную форму волны обратной ЭДС. Постоянные магниты позволяют модулю PMSM создавать крутящий момент при нулевой скорости. PMSM предлагают более высокую плотность крутящего момента по сравнению с асинхронными двигателями переменного тока, обеспечивая меньший размер корпуса при той же мощности. Они также обеспечивают высокую эффективность работы, но требуют инвертора с цифровым управлением.
Характеристики PMSM
Без искр, безопаснее во взрывоопасных средах
Чисто, быстро и эффективно
Разработан для высокопроизводительных сервоприводов
Работает с / без датчиков положения
Компактнее, эффективнее и легче, чем ACIM
Обеспечивает оптимальный крутящий момент в сочетании с полевым управлением (FOC)
Плавная работа на низких и высоких скоростях
Низкий слышимый шум и электромагнитные помехи
Параметры двигателя:
Модель: TZ200XS251
Номинальная мощность: 25кВт
Пиковая мощность: 50 кВт
Напряжение шины: 320 В
Максимальный крутящий момент: 180 Н.м
Пиковая скорость: 9000 об / мин
Тип охлаждения: водяное охлаждение
Уровень изоляции: H
Степень защиты IP: IP67
Размер: Φ245 * 203 мм
Вес ≤39 кг
Способность к развитию
По сравнению с традиционным промышленным двигателем, автомобильный приводной двигатель требует небольшого объема, высокой удельной мощности, компактной конструкции, высокой эффективности, большой площади с высокой эффективностью, легкого веса, высокой надежности и безопасности.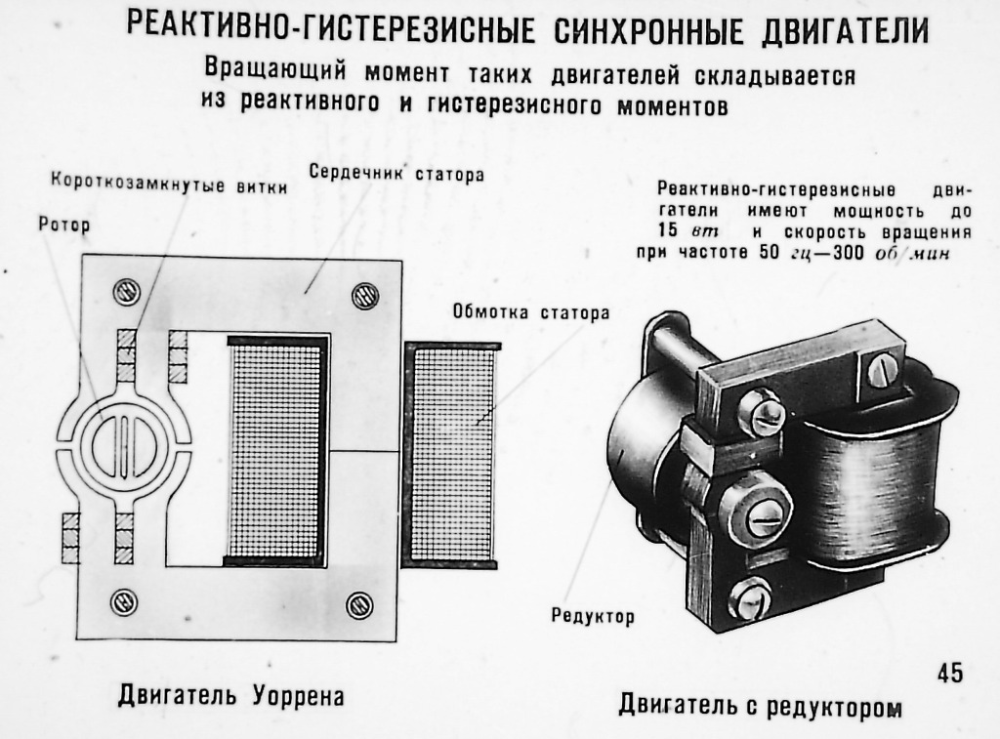 Принимая во внимание вышеупомянутые характеристики приводного двигателя транспортного средства на новой энергии, мы применяем передовую концепцию моделирования конструкции:
Принимая во внимание вышеупомянутые характеристики приводного двигателя транспортного средства на новой энергии, мы применяем передовую концепцию моделирования конструкции:
Электромагнитное поле двигателя:
Использование программного обеспечения EasiMotor для электромагнитного проектирования и моделирования двигателя, эффективного и точного электромагнитного проектирования двигателя, значительно сокращает цикл разработки прототипа;
Поле структуры мотора:
Программное обеспечение SolidWorks компании Dassault используется для полномасштабного параметрического моделирования двигателя, что позволяет эффективно избежать вмешательства в последующую производственную сборку на этапе проектирования и разработки;
Моделирование статического магнитного поля двигателя без нагрузки | Тест обратной электродвижущей силы |
Наш Сертификат
ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ:
В: вы производитель или торговая компания?
О: Мы являемся производителем двигателей, аккумуляторов и микроконтроллеров для электромобилей.
Q: Вы предоставляете образцы?
A: Да, мы приветствуем заказ образцов для тестирования и проверки качества. Доступен индивидуальный заказ.
Вопрос: как насчет времени выполнения заказа?
A: образец требует 7-12 дней, время массового производства требует переговоров.
Все о реактивных двигателях — что это такое и как они работают
Электрические двигатели создают механическое движение, используя преимущества электромагнетизма и основных электрических принципов, и сегодня они составляют подавляющее большинство коммерческих двигателей. Существует так много различных типов электродвигателей, что может быть трудно определить, какой из них подходит для вашего применения.
Эта статья призвана помочь читателям понять устройство электродвигателя путем изучения его конструкции и работы; Эти машины могут быть разделены на двигатели постоянного и переменного тока в зависимости от источника питания и могут быть дополнительно классифицированы в зависимости от их метода выработки механической энергии. В этой статье основное внимание будет уделено конкретному классу двигателей, известному как реактивные двигатели, которые могут относиться к любой из этих категорий в зависимости от конструкции. Мы обсудим этот усовершенствованный двигатель и его рабочие характеристики, чтобы увидеть, как определенные электромагнитные принципы, а именно сопротивление, индукция и переключение, используются для создания вращательной энергии.
В этой статье основное внимание будет уделено конкретному классу двигателей, известному как реактивные двигатели, которые могут относиться к любой из этих категорий в зависимости от конструкции. Мы обсудим этот усовершенствованный двигатель и его рабочие характеристики, чтобы увидеть, как определенные электромагнитные принципы, а именно сопротивление, индукция и переключение, используются для создания вращательной энергии.
Что такое реактивные двигатели?
Хотя реактивные двигатели были изобретены в начале 19 века, они только недавно получили распространение благодаря микроэлектронике и передовым системам управления.
Реактивный двигатель — это усовершенствованный тип двигателя, в котором используются как статоры, так и роторы, как и в большинстве электрических двигателей. Некоторые реактивные двигатели работают с точными оборотами, синхронизируя скорость ротора с вращающимся магнитным полем (RMF) статора, что делает их «синхронными» по конструкции (более подробную информацию об этом можно найти в нашей статье о синхронных двигателях). Их называют реактивными двигателями, потому что они поляризуют величину сопротивления — магнитного эквивалента электрического сопротивления — в полюсах своего ротора для взаимодействия с RMF статора.Подтипы реактивных двигателей включают синхронные реактивные двигатели и вентильные реактивные двигатели, и каждый из них использует реактивное сопротивление уникальным образом.
Их называют реактивными двигателями, потому что они поляризуют величину сопротивления — магнитного эквивалента электрического сопротивления — в полюсах своего ротора для взаимодействия с RMF статора.Подтипы реактивных двигателей включают синхронные реактивные двигатели и вентильные реактивные двигатели, и каждый из них использует реактивное сопротивление уникальным образом.
Как работают реактивные двигатели?
Двумя основными компонентами реактивного двигателя являются внешний неподвижный статор и внутренний ротор, разделенные небольшим воздушным зазором. В зависимости от типа реактивного двигателя конструкция этих двух частей меняется, но основные принципы работы остаются прежними.
Статор состоит из выступающих «выступающих» пар полюсов, образованных протеканием тока по проводу, намотанному на эти выступы.Ротор изготовлен из ферромагнитного металла и содержит собственные полюса, повторяющие контуры магнитного поля статора (либо с выступами, либо с воздушными зазорами/выемками). Когда выступающий полюс ротора совпадает с выступающим полюсом статора, говорят, что ротор находится в положении минимального магнитного сопротивления, то есть величина магнитного «сопротивления» в этой точке наименьшая и «полностью выровнена». Когда полюс статора совпадает с выемками/барьерами/пазами ротора, говорят, что ротор находится в положении максимального сопротивления или «полностью не выровнен».Из-за сохранения энергии ротор всегда будет перемещаться в положение наименьшего сопротивления, и поэтому возникает «нежелательный» крутящий момент, когда ротор полностью не выровнен. Этот крутящий момент притянет ротор к ближайшему выступающему полюсу статора и вызовет вращение. При правильном расчете времени с использованием оборудования систем управления или определенной геометрии ротора этот эффект может создавать непрерывный вращательный выходной сигнал.
Когда выступающий полюс ротора совпадает с выступающим полюсом статора, говорят, что ротор находится в положении минимального магнитного сопротивления, то есть величина магнитного «сопротивления» в этой точке наименьшая и «полностью выровнена». Когда полюс статора совпадает с выемками/барьерами/пазами ротора, говорят, что ротор находится в положении максимального сопротивления или «полностью не выровнен».Из-за сохранения энергии ротор всегда будет перемещаться в положение наименьшего сопротивления, и поэтому возникает «нежелательный» крутящий момент, когда ротор полностью не выровнен. Этот крутящий момент притянет ротор к ближайшему выступающему полюсу статора и вызовет вращение. При правильном расчете времени с использованием оборудования систем управления или определенной геометрии ротора этот эффект может создавать непрерывный вращательный выходной сигнал.
Технические характеристики реактивных двигателей
Существуют определенные показатели, общие для всех реактивных двигателей, и в этой статье мы кратко объясним каждый из них, чтобы помочь понять различия между типами реактивных двигателей. Они ни в коем случае не являются исчерпывающими и содержат только основные характеристики реактивных двигателей.
Они ни в коем случае не являются исчерпывающими и содержат только основные характеристики реактивных двигателей.
Тип фазы
Реактивные двигатели могут приводиться в действие однофазным или многофазным двигателем. Наиболее распространенными многофазными конструкциями являются трехфазные двигатели, которые зарезервированы для приложений с более высоким крутящим моментом, поскольку они не требуют вспомогательных обмоток и могут обеспечивать больший ток для двигателя. Для однофазных двигателей требуются пускатели, и дополнительную информацию можно найти в нашей статье о пускателях двигателей.
Соотношение полюсов статора и ротора
Существуют идеальные соотношения полюсов статора и ротора в зависимости от типа двигателя/желаемых выходных характеристик.Реактивные двигатели обычно имеют соотношение полюсов 6/4, 4/2, 8/6 или 12/8, хотя существуют и другие соотношения. Соотношение 1/1 лучше всего подходит для синхронных реактивных двигателей, поскольку оно обеспечивает более точную синхронизацию.
Номинальная мощность/крутящий момент
Номинальный выходной крутящий момент [с единицами ньютон-метров (Нм) или фунт-сила — футы (lbf-ft)] и мощность [с единицами измерения киловатты (кВт) или лошадиные силы (л.с.)] отображает количество выходной мощности и крутящий момент, обеспечиваемый двигателем в установившемся режиме. Номинальная мощность может варьироваться от долей лошадиных сил до сотен лошадиных сил, что показывает, насколько универсальными могут быть эти двигатели.
Пульсации крутящего момента и диапазон скоростей постоянного крутящего момента
Поскольку есть точки, в которых реактивный крутящий момент не создается (полностью выровненные положения), при вращении вала возникает периодическое изменение крутящего момента. Это может вызвать эффект «пульсации крутящего момента», когда вал испытывает крутящий момент только в этих положениях с высоким сопротивлением. Эта пульсация крутящего момента может вызвать шум и нежелательные колебания в машине. Поэтому существуют диапазоны постоянного крутящего момента для реактивных двигателей, в которых эта пульсация крутящего момента минимальна, обычно оценивается как диапазон оборотов в минуту.
Поэтому существуют диапазоны постоянного крутящего момента для реактивных двигателей, в которых эта пульсация крутящего момента минимальна, обычно оценивается как диапазон оборотов в минуту.
Типы реактивных двигателей
Есть две основные конструкции, в которых используется реактивный двигатель: синхронный реактивный двигатель и вентильный реактивный двигатель. Каждая из этих конструкций достаточно различна, чтобы требовать отдельных объяснений, и в этом разделе будет кратко описан каждый подтип реактивного двигателя.
Синхронные реактивные двигатели
Синхронные реактивные двигатели предназначены для работы с точными «синхронными» скоростями. Они достигают этого за счет использования трехфазной обмотки статора (создающей истинное RMF) и ротора, в котором реализованы явно выраженные полюса ротора и внутренние барьеры магнитного потока (обычно пазы или воздушные зазоры внутри ротора, см. Рисунок 1).В роторе часто используется модифицированная короткозамкнутая клетка вокруг этих выступающих полюсов, так что он может извлечь выгоду из эффекта индукции и стать самозапускающимся (дополнительную информацию об этой концепции можно найти в нашей статье о двигателях с короткозамкнутым ротором). Когда двигатель запускается, он приближается к синхронной скорости за счет индукции, а затем фиксируется в синхронизме за счет реактивного момента, создаваемого магнитными барьерами ротора.
Когда двигатель запускается, он приближается к синхронной скорости за счет индукции, а затем фиксируется в синхронизме за счет реактивного момента, создаваемого магнитными барьерами ротора.
Рис. 1: Типовые конструкции синхронных реактивных двигателей.Обратите внимание на участки с низким сопротивлением (полюса) и высоким сопротивлением (воздушные зазоры/выемки)
Изображение предоставлено: http://www.faculty.umassd.edu/xtras/catls/resources/binarydoc/3624.ppt
Импульсные реактивные двигатели
Импульсные реактивные двигатели относятся к типу шаговых двигателей, но они уникальны тем, что имеют перевернутую обмотку, где обмотки возбуждения находятся в статоре, а не в роторе (см. рис. 2). Ротор представляет собой ферромагнитный сердечник с постоянными полюсами и выемками, на которые действуют электромагнитные полюса статора.Хотя это упрощает физическую конструкцию, это усложняет электрическую настройку, поскольку электронная система управления должна включать и выключать полюса статора, чтобы «приводить» полюса ротора в каждое новое положение, вызывая вращение.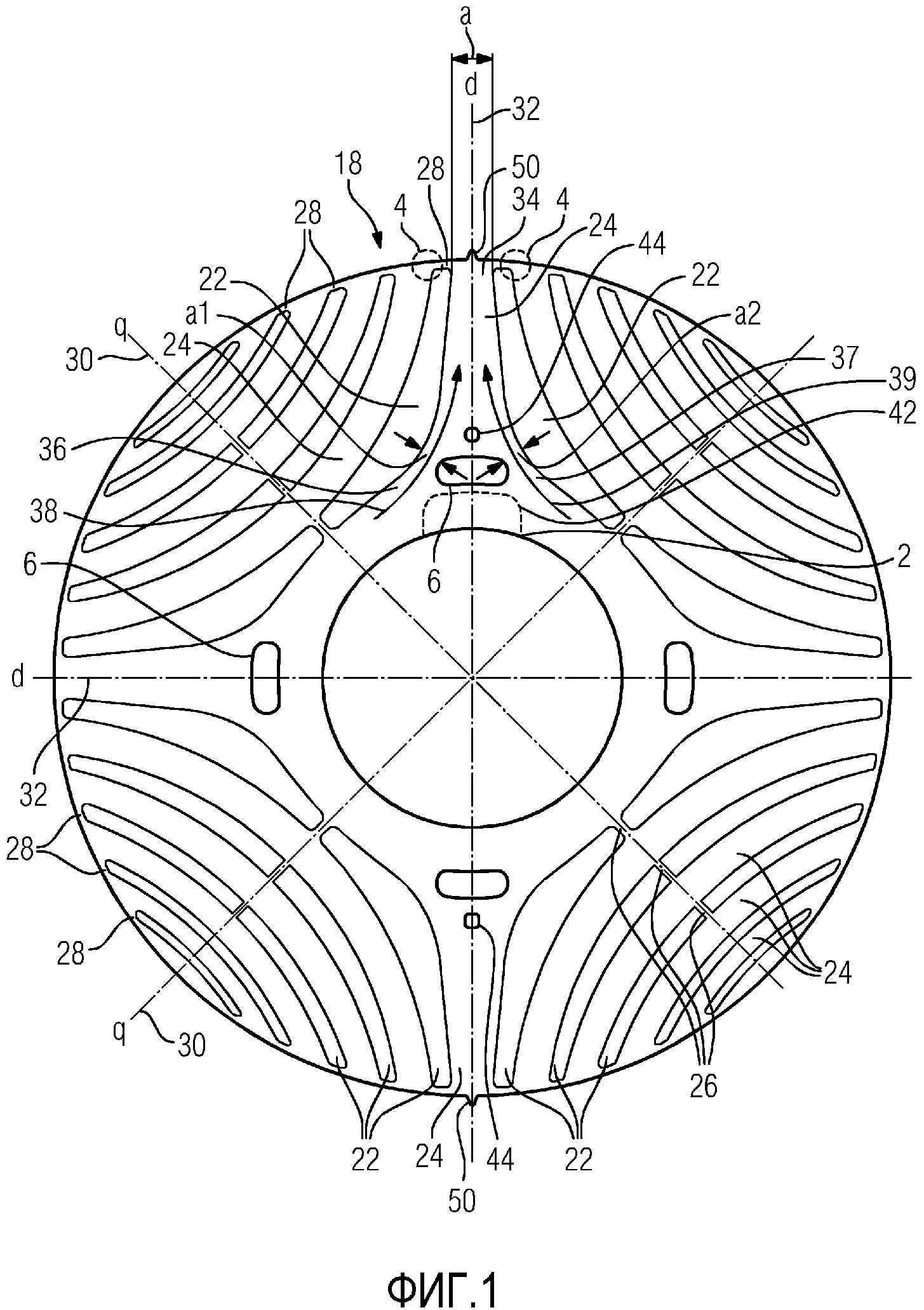 Реактивный реактивный двигатель может использовать электронный датчик положения, который вычисляет угол между полюсами ротора и обмотками статора, а также синхронизирующий механизм для синхронизации полюсов статора с частотой вращения. Эти двигатели воспользовались достижениями в области полупроводников и микроэлектроники 21-го века и до сих пор оптимизированы для множества различных применений.
Реактивный реактивный двигатель может использовать электронный датчик положения, который вычисляет угол между полюсами ротора и обмотками статора, а также синхронизирующий механизм для синхронизации полюсов статора с частотой вращения. Эти двигатели воспользовались достижениями в области полупроводников и микроэлектроники 21-го века и до сих пор оптимизированы для множества различных применений.
Рис. 2: Типовая конструкция вентильного реактивного двигателя. Обратите внимание на неравное соотношение полюсов ротора и статора и катушки, окружающие выступающие полюса статора.
Изображение предоставлено: https://en.wikipedia.org
Применение и критерии выбора
В зависимости от типа реактивного двигателя их применение может различаться; тем не менее, эти двигатели нашли несколько общих применений, которые отличают их от других электродвигателей, и они быстро опережают своих старых собратьев.
Их первым большим преимуществом является простая конструкция — в них не используются контактные кольца, обмотки возбуждения ротора, постоянные магниты, коммутаторы или щетки. Эта простота повышает их эффективность, надежность, производственные затраты, затраты на техническое обслуживание и делает их элегантным вариантом для дизайнеров.
Они обеспечивают очень высокую удельную мощность при небольшом размере; Фактически, реактивные двигатели могут обеспечить пусковой момент в 2-4 раза больший, чем у традиционных асинхронных машин того же размера, что позволяет им быть на 1-2 рамы меньше при той же выходной мощности.Их можно использовать в ситуациях, требующих от 0 до сотен тысяч оборотов в минуту, при условии, что они ограничены только входным током и их подшипниками.
Эти преимущества являются палкой о двух концах, поскольку простая конструкция сочетается со сложной электрической схемой и системами управления. Реактивные двигатели по своей природе привязаны к своей электронике, поэтому эти схемы необходимо покупать вместе с этими двигателями и устанавливать, что может увеличить затраты.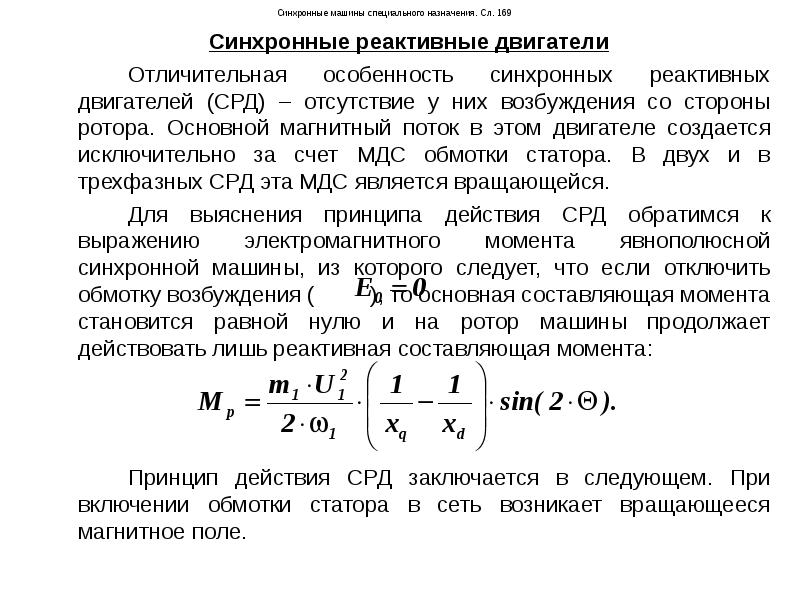 Их отношение тока к крутящему моменту чрезвычайно нелинейно и должно решаться с помощью конструкции их системы управления.Переключение явно выраженных полюсов в вентильных реактивных двигателях должно быть точным, иначе двигатель не будет работать. Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
Их отношение тока к крутящему моменту чрезвычайно нелинейно и должно решаться с помощью конструкции их системы управления.Переключение явно выраженных полюсов в вентильных реактивных двигателях должно быть точным, иначе двигатель не будет работать. Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
В настоящее время эти двигатели наиболее эффективны на высоких скоростях и нашли широкое применение в стиральных машинах, аналоговых электросчетчиках, приводах управляющих стержней для ядерных реакторов, двигателях с жесткими дисками, электромобилях, приводах стеклоочистителей, записывающем оборудовании и многом другом. более.Они все еще оптимизируются сегодня и могут однажды заменить асинхронный двигатель в качестве отраслевого стандарта благодаря своим благоприятным характеристикам.
Резюме
В этой статье представлено понимание того, что такое реактивные двигатели и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://rmd.ac.in/dept/eee/notes/7/SEM/unit1.pdf
- http://lipo.ece.wisc.edu
- http://www.refreedrive.eu
- https://people.ucalgary.ca
- http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.662.959&rep=rep1&type=pdf
- http://people.ece.umn.edu/users/riaz/animations/switchrel.html
Другие товары для двигателей
Больше из Машины, инструменты и расходные материалы
Реактивный двигатель | Двигатели переменного тока
Двигатель с переменным магнитным сопротивлением основан на том принципе, что свободный кусок железа будет двигаться, чтобы завершить путь магнитного потока с минимальным магнитным сопротивлением , магнитным аналогом электрического сопротивления.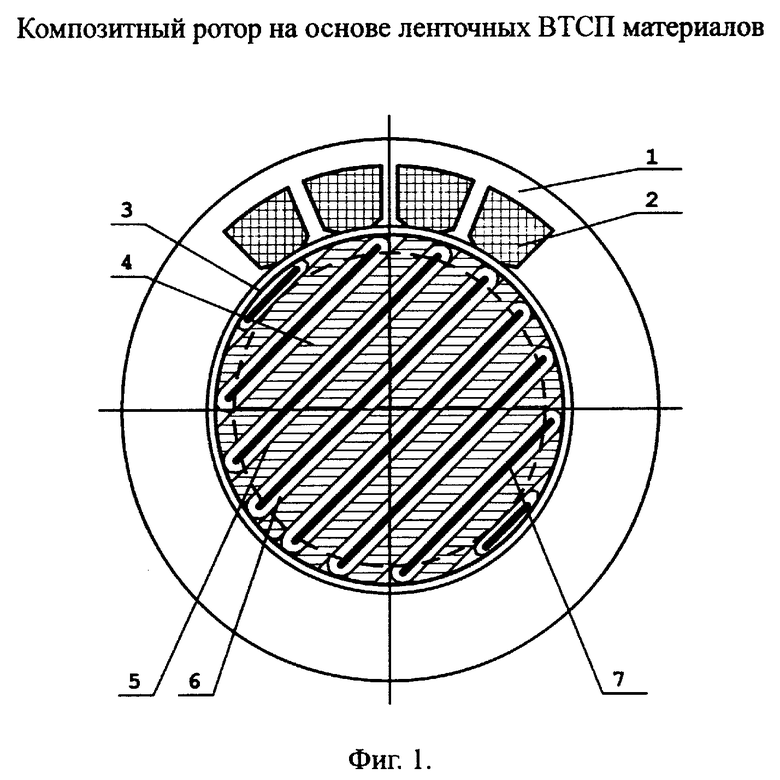
Синхронное сопротивление
Если вращающееся поле большого синхронного двигателя с явно выраженными полюсами обесточено, он все равно будет развивать 10 или 15% синхронного крутящего момента. Это связано с переменным магнитным сопротивлением на протяжении всего оборота ротора. Большой синхронный реактивный двигатель не имеет практического применения. Тем не менее, это практично в небольших размерах.
Если в беспроводном роторе асинхронного двигателя прорезать прорези, соответствующие прорезям статора, получится синхронный реактивный двигатель .
Он запускается как асинхронный двигатель, но работает с небольшим синхронным крутящим моментом. Синхронный крутящий момент возникает из-за изменения сопротивления магнитного пути от статора через ротор при совмещении пазов.
Этот двигатель представляет собой недорогое средство для создания среднего синхронного крутящего момента. Низкий коэффициент мощности, низкий крутящий момент и низкий КПД являются характеристиками переменного реактивного двигателя с прямым приводом от сети. Таков был статус двигателя с переменным сопротивлением за столетие до разработки полупроводникового управления мощностью.
Таков был статус двигателя с переменным сопротивлением за столетие до разработки полупроводникового управления мощностью.
Переключаемое сопротивление
Если железный ротор с полюсами, но без каких-либо проводников, подсоединить к многофазному статору, получится вентильный реактивный двигатель , способный синхронизироваться с полем статора. Когда пара полюсов катушки статора находится под напряжением, ротор перемещается по пути с наименьшим магнитным сопротивлением (рисунок ниже).
Импульсный реактивный двигатель также известен как переменный реактивный двигатель. Сопротивление ротора пути потока статора зависит от положения ротора.
Индуктивное сопротивление является функцией положения ротора в двигателе с переменным реактивным сопротивлением
Последовательное переключение (рис. ниже) фаз статора перемещает ротор из одного положения в другое. Магнитный поток ищет путь наименьшего сопротивления.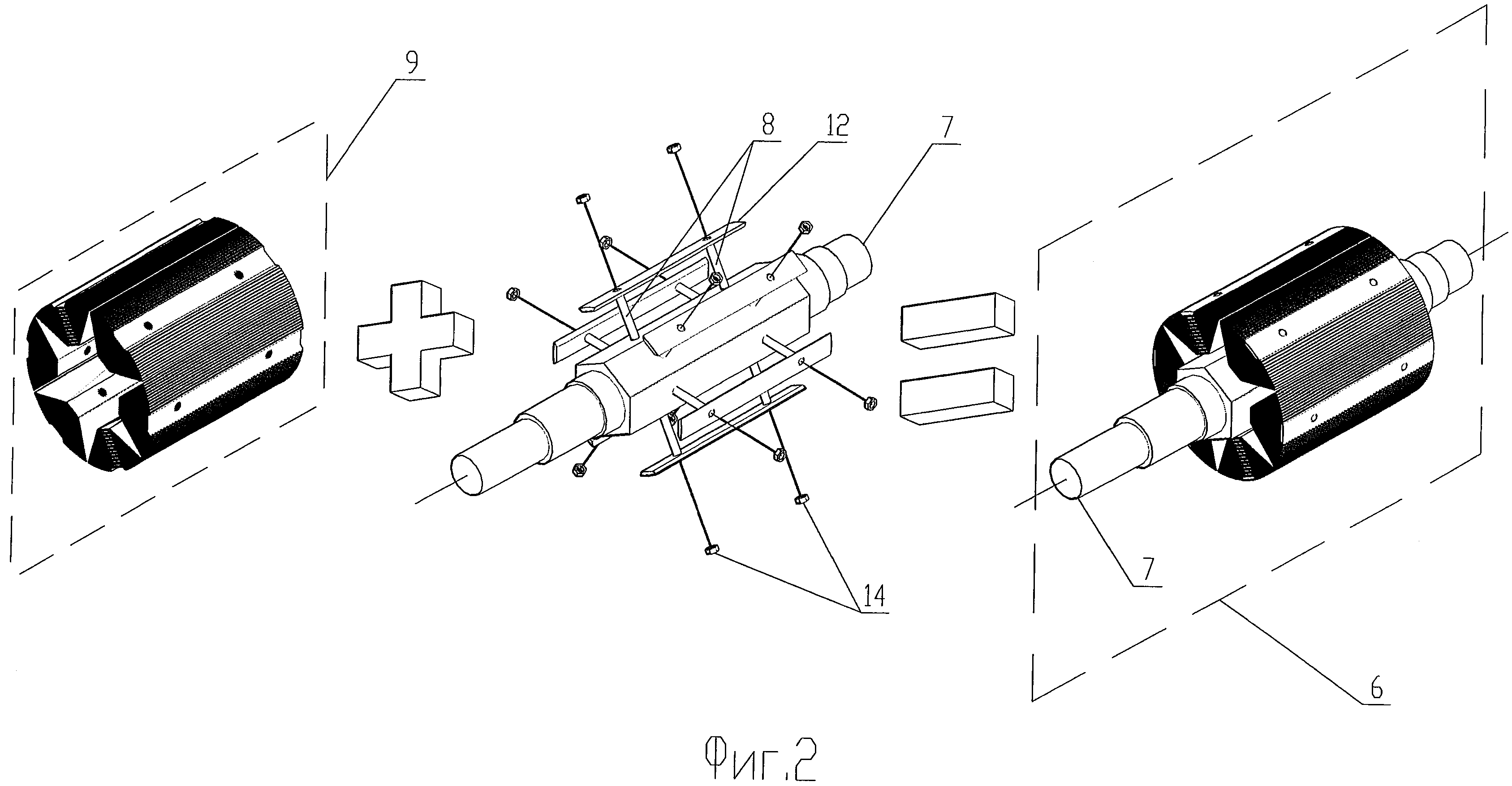 Ниже представлен упрощенный ротор и формы сигналов, иллюстрирующие работу.
Ниже представлен упрощенный ротор и формы сигналов, иллюстрирующие работу.
Двигатель с переменным сопротивлением, упрощенная работа
Если один конец каждой трехфазной обмотки вентильного реактивного двигателя вывести через общий провод, мы можем объяснить работу, как если бы это был шаговый двигатель (рисунок выше).Другие соединения катушек последовательно подтягиваются к земле, по одному, по схеме волнового привода . Это притягивает ротор к вращающемуся по часовой стрелке магнитному полю с шагом 60 ° .
Различные формы сигналов могут управлять двигателями с переменным сопротивлением (рисунок ниже). Волновой привод (а) прост и требует только однополюсного однополярного переключателя. Это тот, который переключается только в одном направлении. Биполярный привод обеспечивает больший крутящий момент (b), но требует биполярного переключателя.
Драйвер питания должен попеременно тянуть вверх и вниз.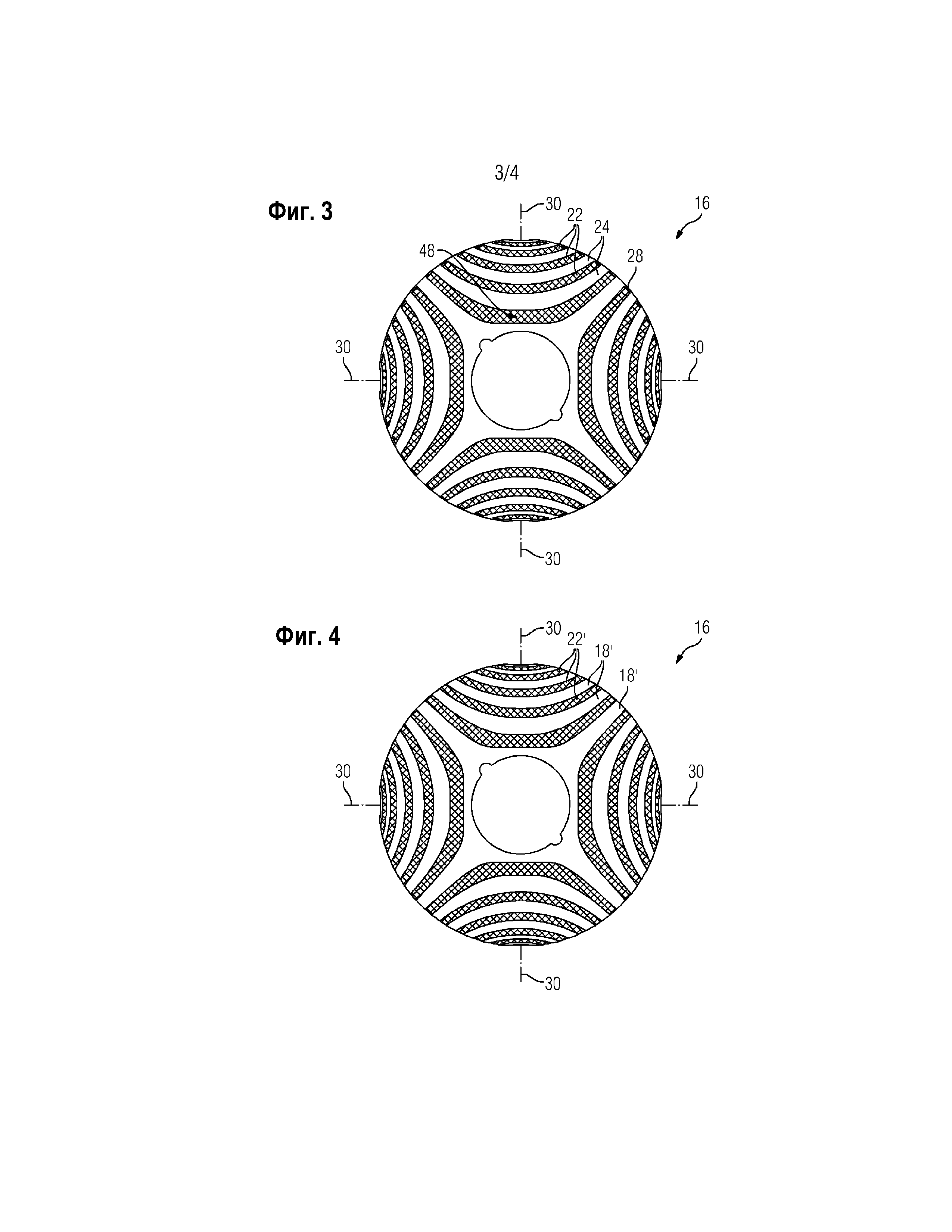 Формы сигналов (a и b) применимы к версии двигателя с переменным сопротивлением с шаговым двигателем. Для плавной работы без вибраций желательна 6-ступенчатая аппроксимация синусоиды (с), которую легко создать.
Формы сигналов (a и b) применимы к версии двигателя с переменным сопротивлением с шаговым двигателем. Для плавной работы без вибраций желательна 6-ступенчатая аппроксимация синусоиды (с), которую легко создать.
Синусоидальный сигнал (d) может генерироваться широтно-импульсным модулятором (ШИМ) или питаться от линии электропередачи.
Формы сигналов двигателя с переменным сопротивлением: (a) униполярный волновой привод, (b) биполярный полный шаг (c) синусоидальный (d) биполярный 6-ступенчатый
Удвоение числа полюсов статора снижает скорость вращения и увеличивает крутящий момент.Это может исключить зубчатую передачу. Двигатель с переменным сопротивлением, предназначенный для движения дискретными шагами, остановки и запуска, представляет собой шаговый двигатель с переменным сопротивлением .
Если целью является плавное вращение, существует версия вентильного реактивного двигателя с электронным управлением. Двигатели с переменным сопротивлением или шаговые двигатели на самом деле используют роторы, подобные показанным на рисунке ниже.
Двигатели с переменным сопротивлением или шаговые двигатели на самом деле используют роторы, подобные показанным на рисунке ниже.
Двигатель переменного реактивного сопротивления с электронным управлением
Двигатели с переменным реактивным сопротивлением плохо работают, когда они питаются напрямую от сети.Тем не менее, микропроцессоры и полупроводниковый силовой привод делают этот двигатель экономичным высокопроизводительным решением для некоторых приложений с большими объемами.
Несмотря на сложность управления, этот двигатель легко вращается. Последовательное переключение катушек возбуждения создает вращающееся магнитное поле, которое тащит за собой ротор неправильной формы, поскольку он ищет путь с наименьшим магнитным сопротивлением.
Взаимосвязь между крутящим моментом и током статора сильно нелинейна — ее трудно контролировать.
Двигатель переменного реактивного сопротивления с электронным управлением
Двигатель переменного реактивного сопротивления с электронным управлением (рисунок ниже) напоминает бесщеточный двигатель постоянного тока без ротора с постоянными магнитами.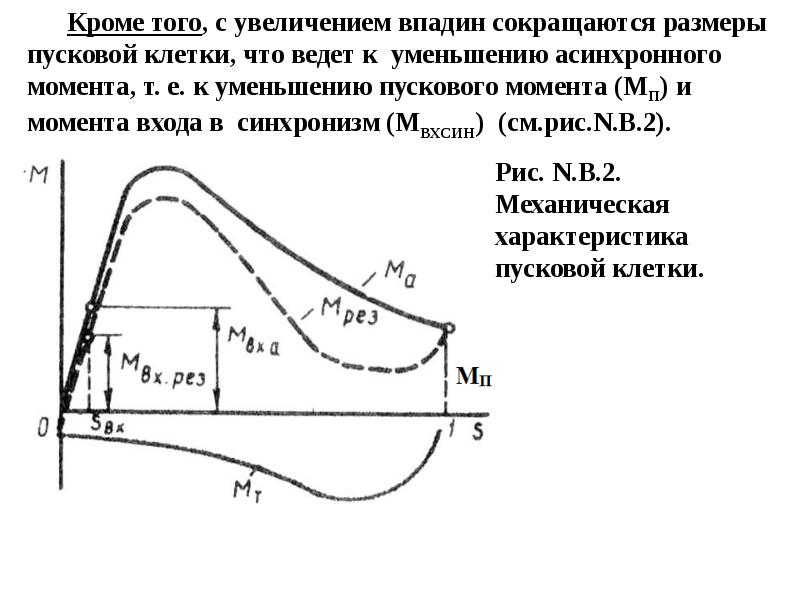 Это делает двигатель простым и недорогим. Однако это компенсируется стоимостью электронного управления, которое далеко не так просто, как для бесщеточного двигателя постоянного тока.
Это делает двигатель простым и недорогим. Однако это компенсируется стоимостью электронного управления, которое далеко не так просто, как для бесщеточного двигателя постоянного тока.
Хотя двигатель с переменным сопротивлением прост, даже в большей степени, чем асинхронный двигатель, им трудно управлять.Электронное управление решает эту проблему и позволяет управлять двигателем значительно выше и ниже частоты сети. Двигатель с переменным сопротивлением, управляемый сервоприводом , электронной системой обратной связи, регулирует крутящий момент и скорость, сводя к минимуму пульсации крутящего момента.
Двигатель переменного реактивного сопротивления с электронным управлением
Это противоположно высокому пульсирующему крутящему моменту, необходимому в шаговых двигателях. Вместо шагового двигателя двигатель с переменным сопротивлением оптимизирован для непрерывного высокоскоростного вращения с минимальными пульсациями крутящего момента.
Необходимо измерить положение ротора с помощью датчика положения вращения, такого как оптический или магнитный энкодер, или получить его путем контроля противо-ЭДС статора. Микропроцессор выполняет сложные расчеты для переключения обмоток в нужное время с твердотельными устройствами.
Это должно быть сделано точно, чтобы свести к минимуму звуковой шум и пульсацию крутящего момента. Для наименьшей пульсации крутящего момента необходимо контролировать и контролировать ток обмотки.
Строгие требования к приводу делают этот двигатель пригодным только для приложений с большими объемами, таких как энергоэффективные двигатели пылесосов, двигатели вентиляторов или двигатели насосов.В одном из таких пылесосов используется компактный высокоэффективный электродвигатель вентилятора со скоростью вращения 100 000 об/мин.
Простота двигателя компенсирует стоимость электроники привода. Без щеток, без коллектора, без обмоток ротора, без постоянных магнитов, что упрощает производство двигателей.
Эффективность этого двигателя с электронным управлением может быть высокой. Но он требует значительной оптимизации с использованием специализированных методов проектирования, что оправдано только при больших объемах производства.
Преимущества
- Простая конструкция — без щеток, коллектора или постоянных магнитов, без меди или алюминия в роторе.
- Высокая эффективность и надежность по сравнению с обычными двигателями переменного или постоянного тока.
- Высокий пусковой момент.
- Экономичнее по сравнению с бесщеточным двигателем постоянного тока при больших объемах.
- Адаптируется к очень высокой температуре окружающей среды.
- Недорогой точный контроль скорости возможен, если объем достаточно высок.
Недостатки
- Ток в зависимости от крутящего момента сильно нелинейный
- Переключение фаз должно быть точным, чтобы свести к минимуму пульсации крутящего момента
- Фазный ток должен контролироваться, чтобы свести к минимуму пульсации крутящего момента
- Акустический и электрический шум
- Неприменимо к небольшим объемам из-за сложных проблем управления
Синхронный реактивный двигатель
Дмитрий Левкин
Синхронный реактивный двигатель представляет собой синхронный электродвигатель, крутящий момент которого обусловлен неравенством проницаемости (магнитной проводимости) по квадратурной и прямой осям ротора, не имеет обмотки возбуждения или постоянных магнитов [1].
Статор индукторного двигателя может быть с распределенной и с сосредоточенной обмоткой и состоит из корпуса и сердечника с обмоткой.
Синхронный реактивный двигатель
Статор синхронного реактивного двигателя с распределенной обмоткой
Различают три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-ламинированный ротор и поперечно-ламинированный ротор.
Ротор с явно выраженными полюсами
Аксиально-ламинированный ротор
Поперечно-ламинированный ротор
Переменный ток, проходящий через обмотки статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнитопроводящую ось (ось d) с приложенным полем, чтобы минимизировать магнитное сопротивление (магнитное сопротивление) в магнитной цепи. Амплитуда момента прямо пропорциональна разности прямой L d и квадратурной L q индуктивностей. Следовательно, чем больше разница, тем больше создаваемый крутящий момент.
Амплитуда момента прямо пропорциональна разности прямой L d и квадратурной L q индуктивностей. Следовательно, чем больше разница, тем больше создаваемый крутящий момент.
Линии магнитного поля синхронного реактивного двигателя
Основная идея может быть объяснена с помощью рисунка ниже. Объект «а», состоящий из анизотропного материала, имеет разную проводимость вдоль оси d и оси q, а изотропный магнитный материал объекта «б» имеет одинаковую проводимость во всех направлениях.Магнитное поле, приложенное к анизотропному объекту «а», создает крутящий момент, если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «а» не совпадает с линиями магнитного поля, то объект будет вносить искажения в магнитное поле. В этом случае направление искаженных магнитных линий будет совпадать с осью q объекта.
Объект с анизотропной (а) и изотропной (б) геометрией в магнитном поле
Линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном двигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет момент, направленный на уменьшение потенциальной энергии всей системы за счет уменьшения искажения поля по оси q (δ→0). Если угол δ поддерживать постоянным, например, за счет управления магнитным полем, то электромагнитная энергия будет непрерывно преобразовываться в механическую энергию.
Ток статора отвечает за намагничивание и создание крутящего момента, который пытается уменьшить искажение поля.Крутящий момент управляется путем управления текущим углом, то есть углом между текущим вектором обмотки статора и осью d ротора во вращающейся системе координат.
- Преимущества:
- Простая и прочная конструкция ротора: :
ротор имеет простую конструкцию, состоящую из листовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Низкотемпературный :
так как в роторе отсутствуют токи, он не нагревается во время работы, что увеличивает срок службы электродвигателя. - Без магнитов :
окончательная цена электродвигателя снижена, так как в производстве не используются редкоземельные металлы. При отсутствии магнитных сил обслуживание электродвигателя упрощается. - Низкий момент инерции ротора: :
так как на роторе нет обмотки и магнитов, момент инерции ротора ниже, что позволяет электродвигателю быстрее разгоняться и экономить энергию. - Регулятор скорости :
Ввиду того, что синхронный реактивный двигатель для своей работы требует преобразователя частоты, можно регулировать скорость вращения реактивного двигателя в широком диапазоне скоростей.
- Недостатки:
- Регулятор частоты : Для работы
требуется частотно-регулируемый привод. - Низкий коэффициент мощности :
из-за того, что магнитный поток создается только реактивным током. Решается применением частотно-регулируемого привода с коррекцией мощности.

Читайте также
Синхронный реактивный двигатель: решение для электромобилей без редкоземельных элементов
Исследовательская группа факультета промышленной и информационной инженерии и экономики Университета Л’Акуилы уже много лет работает в области проектирования, создания прототипов и испытаний инновационных двигателей для автомобилей.Недавно он участвовал в европейском проекте h3020-GV, направленном на то, чтобы помочь избежать использования редкоземельных магнитов за счет разработки следующего поколения электрических трансмиссий, обеспечивая промышленную осуществимость массового производства, уделяя особое внимание низкой стоимости производства. технологии.
Воздействие двигателя внутреннего сгорания на окружающую среду привело к попыткам заменить его альтернативными силовыми установками, среди которых электродвигатель стал основным кандидатом.Рынок электромобилей находится на подъеме, и в ближайшие двадцать лет ожидается всплеск продаж электромобилей (EV), который должен превысить продажи традиционных автомобилей с ДВС, как показано на рис.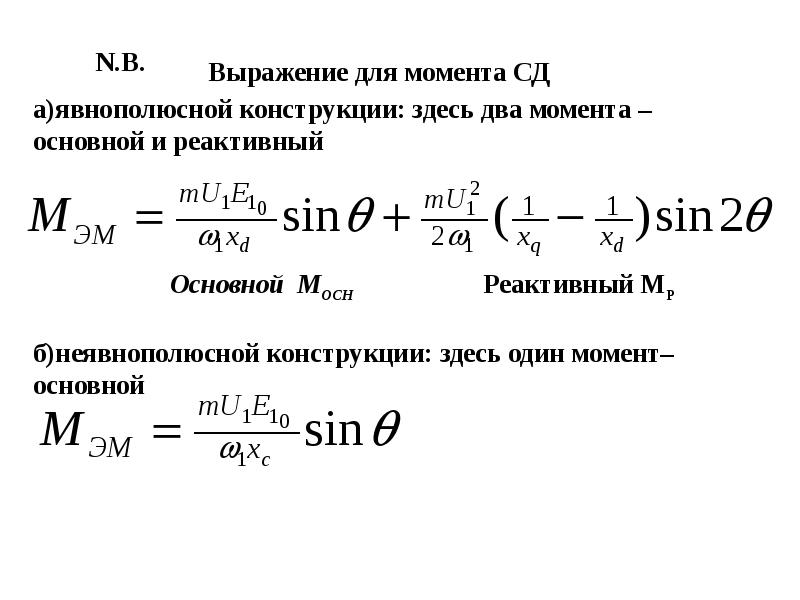 1.
1.
Новые технологии накопления энергии и силовые агрегаты играют решающую роль в развитии рынка электромобилей. На уровне двигателя ключевые компоненты и инновационные материалы должны быть интегрированы в текущие конструкции двигателей. Недавние достижения в области материалов, силовой электроники и систем управления способствовали созданию новых энергоэффективных и эффективных силовых агрегатов, использующих инновационные моторные технологии.
1. Динамика продаж электромобилей (Bloomberg New Energy Finance)
Основные характеристики электродвигателя
Требования к электродвигателям электромобилей отличаются от обычных, используемых в промышленности. Наиболее сложными характеристиками являются уменьшенный размер и высокая эффективность в расширенном диапазоне скоростей. Для хорошей перегрузочной способности и широкого диапазона скоростей машина обычно имеет водяное охлаждение с водяной рубашкой вокруг сердечника статора.
Основные характеристики электродвигателя следующие:
1. высокая удельная мощность и удельный крутящий момент;
высокая удельная мощность и удельный крутящий момент;
2. очень широкий диапазон скоростей;
3. высокая эффективность в широком диапазоне крутящего момента и скорости;
4. Широкие возможности работы при постоянной мощности;
5. высокая надежность и устойчивость к автомобильным условиям;
6. разумная стоимость.
Поскольку электромобиль работает в широком диапазоне крутящего момента и скорости в различных условиях вождения, конструкция двигателя должна быть направлена на достижение общей экономии энергии в течение ездового цикла транспортного средства (т.г. WLTP, NEDC, UDDS). Существует много требований к разработке силовых установок с высокой удельной мощностью, высокой эффективностью и низкой стоимостью.
Исследования в этой области были интенсивными в последние несколько лет, были изучены и предложены различные типы электрических машин. Подавляющее большинство решений для двигателей основаны на технологии постоянных магнитов с использованием редкоземельных магнитов. В таблице 1 представлены существующие электромобили на рынках Европы и США с указанием технологических решений для тяговых двигателей.
В таблице 1 представлены существующие электромобили на рынках Европы и США с указанием технологических решений для тяговых двигателей.
Таблица 1: Тяговые двигатели для электромобилей
От синхронного двигателя с постоянными магнитами
Синхронные двигатели с постоянными магнитами (ПМ) более привлекательны, и основными преимуществами являются их высокий КПД, высокая удельная мощность и высокая надежность.
Двигатели с постоянными магнитами относительно просты в управлении и демонстрируют отличные характеристики с точки зрения управления максимальным крутящим моментом на ампер и оптимальной работой на увеличенной скорости. Различные типы машин с ПМ предлагаются в зависимости от положения ПМ в роторе и могут быть классифицированы как магниты с поверхностным или внутренним монтажом.
Высокая и изменчивая стоимость сырья для магнитов ставит под сомнение их долгосрочную доступность, особенно с учетом того, что технология электромобилей будет производиться в массовом производстве. Кроме того, двигатели с постоянными магнитами имеют ряд технических недостатков, которые ограничивают характеристики двигателя, в частности эффект размагничивания, если температура двигателя превышает условия его эксплуатации. Поэтому все большее внимание уделяется альтернативным решениям, включающим машины без редкоземельных элементов (RE) или машины с уменьшенным количеством RE-PM.
Кроме того, двигатели с постоянными магнитами имеют ряд технических недостатков, которые ограничивают характеристики двигателя, в частности эффект размагничивания, если температура двигателя превышает условия его эксплуатации. Поэтому все большее внимание уделяется альтернативным решениям, включающим машины без редкоземельных элементов (RE) или машины с уменьшенным количеством RE-PM.
Синхронный реактивный двигатель
Синхронный реактивный двигатель (SynRM) в последние годы вызывает большой интерес и представляет собой достойную альтернативу для электрических и гибридных транспортных средств благодаря своей простой и прочной конструкции. Основное преимущество SynRM заключается в отсутствии потерь в клетке ротора или потерь с постоянными магнитами, что позволяет поддерживать постоянный крутящий момент выше, чем крутящий момент асинхронного двигателя (АД) того же типоразмера. Другими важными особенностями являются:
1.ротор потенциально дешевле, чем двигатели с постоянными магнитами и асинхронными двигателями;
2.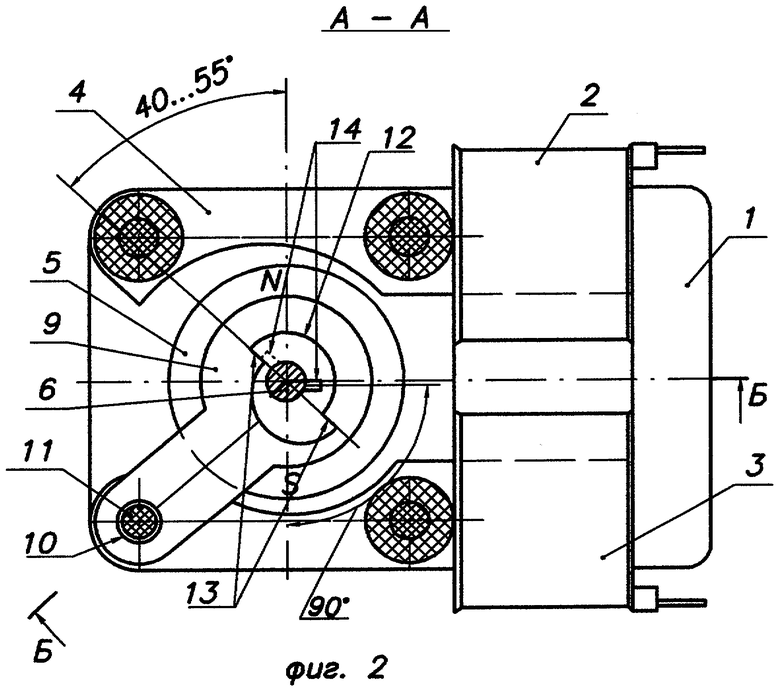 удельный крутящий момент является приемлемым и не зависит от температуры ротора;
удельный крутящий момент является приемлемым и не зависит от температуры ротора;
3. Алгоритм управления полем проще по сравнению с АД приводами.
2. Сечение SynRM
мощностью 200 кВт Обычные двигатели SynRM известны своей более низкой удельной (пиковой) мощностью и удельным (пиковым) крутящим моментом (по сравнению с двигателями с постоянными магнитами), более высоким уровнем шума и более низким коэффициентом мощности.
Несмотря на эти недостатки, можно получить двигатели с высокой плотностью крутящего момента и высоким КПД благодаря оптимизированной конструкции ротора.
Удельная мощность в SynRM увеличивается за счет увеличения рабочей скорости ротора и области ослабления потока. Тем не менее, оптимальная геометрия для характеристик двигателя должна быть усовершенствована, чтобы гарантировать механическую целостность ротора на высокой скорости.
Новые решения для систем силовой тяги электромобилей
Исследовательская группа факультета промышленной и информационной инженерии и экономики Университета Л’Акуилы уже много лет работает в области проектирования, создания прототипов и испытаний инновационных двигателей для автомобилей.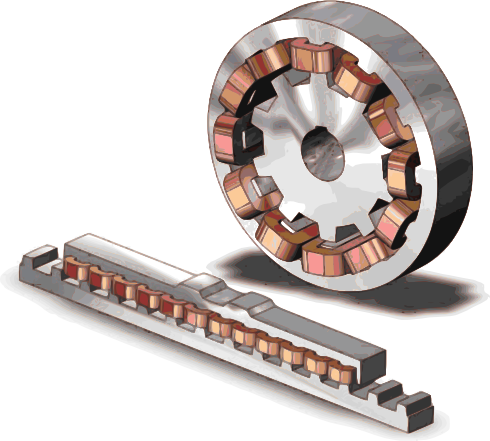 Группа недавно приняла участие в европейском проекте h3020-GV под названием «RefreeDrive» — электронные приводы без редкоземельных элементов для недорогого производства.
Группа недавно приняла участие в европейском проекте h3020-GV под названием «RefreeDrive» — электронные приводы без редкоземельных элементов для недорогого производства.
Таблица 2: Требования SynRM для целевого приложения
Этот проект направлен на то, чтобы способствовать отказу от использования редкоземельных магнитов путем разработки следующего поколения электрических трансмиссий, обеспечивая промышленную осуществимость массового производства, уделяя особое внимание низкой стоимости технологии изготовления.
Целью исследования является изучение и разработка новых решений для силовых тяговых систем электромобилей на базе бесколлекторных электрических машин переменного тока без редкоземельных магнитов.
Благодаря разработке топологии электродвигателя в рамках проекта были достигнуты более высокие характеристики с точки зрения удельной мощности, удельной мощности и эффективности по сравнению с текущим электромобилем, взятым в качестве эталона (Tesla Model S 60). Консорциум ReFreeDrive состоит из 13 партнеров в шести европейских странах, а команда Университета Л’Акуила взяла на себя разработку высокоскоростного синхронно-реактивного двигателя (пиковая мощность 200 кВт) для полностью электрического автомобиля премиум-класса. Цель состояла в том, чтобы спроектировать SynRM с жидкостным охлаждением, который мог бы удовлетворить предъявляемым требованиям, показанным в таблице 2.
Цель состояла в том, чтобы спроектировать SynRM с жидкостным охлаждением, который мог бы удовлетворить предъявляемым требованиям, показанным в таблице 2.
Производительность при соблюдении целевых затрат на компоненты
Вышеупомянутые направления потребовали сложного процесса оптимизации для достижения требуемых характеристик двигателя при соблюдении целевых затрат на компоненты. Для уточнения конструкции были использованы специальные процедуры определения размеров и алгоритмы оптимизации, а предлагаемое решение представляет собой инновационную конструкцию ротора с «жидкостными» барьерами и радиальными ребрами.
На рис.2 показано поперечное сечение 6-полюсного SynRM. Ротор асимметричной формы имеет несколько «ребер», которые соединяют сегменты друг с другом в осевом и поперечном направлениях: эти соединения сохраняют достаточную механическую целостность конструкции ротора при воздействии вращательных сил. применяются на высокой скорости.
Таблица 3: Производительность SynRM
Оптимальное расположение и оптимальная толщина ребер ротора были уточнены с помощью «оптимизатора топологии» в сочетании с механическим программным обеспечением конечных элементов; этот алгоритм позволил оптимизировать количество и расположение массы, необходимой механической части для выдерживания напряжения.
Основные характеристики двигателя при пиковой мощности и длительной мощности приведены в таблице 3, а на рис. 3 представлена карта КПД в моторном режиме: пиковый КПД составляет около 96%, максимальный крутящий момент — 383 Нм при пиковой мощности около 250 кВт. при 6200 об/мин. При максимальной частоте вращения (18000 об/мин) максимальная мощность составляет 56 кВт: эти показатели полностью удовлетворяют требованиям, приведенным в таблице 2.
3. Карта эффективности SynRM
4. Ротор SynRM (1 полюс): механическое напряжение при 18000 об/мин
Карта механического эквивалентного напряжения при максимальной скорости (18000 об/мин) представлена на рис.4: результаты являются удовлетворительными и подтверждают, что конструкция ротора способна выдерживать механические нагрузки на высоких скоростях и удовлетворяет механическим ограничениям выбранной электротехнической стали.
Машина меньшей мощности (пиковая мощность 75 кВт) была уменьшена по сравнению с конструкцией мощностью 200 кВт за счет изменения только обмотки статора и длины пакета, чтобы снизить производственные затраты.
Были реализованы два прототипа, и на рис. 5 показаны сердечники статора и ротора типоразмеров 75 и 200 кВт.
5. Сердечники статора и ротора прототипов SynRM
Силовая электроника была разработана компанией R13 Technology (дочернее предприятие Университета Л’Акуила) для прямой интеграции с корпусом SynRM, использующим общую систему охлаждения двигателя.
Силовые агрегаты (75 и 200 кВт) будут испытаны в реальных условиях движения на испытательном стенде и демонстраторах автомобилей.
Марко Виллани, Университет Л’Акуила, кафедра промышленной и информационной инженерии и экономики
ОБ АВТОРЕ
Марко Виллани, Университет Л’Акуила, кафедра промышленной и информационной инженерии и экономики
Марко Виллани получил степень магистра. получил степень в области электротехники в Университете Аквилы, Италия, в 1985 году.В 1993 году он стал доцентом кафедры силовых преобразователей, электрических машин и приводов. В 1990 году он был научным сотрудником в Дрезденском университете, Германия, а в 1995 году — в Университете Нагасаки, Нагасаки, Япония. В 1998 году он участвовал в двух проектах SAVE, касающихся «Повышения энергоэффективности трехфазных асинхронных двигателей» и «Барьеров против ремонта энергоэффективных двигателей». Он принимал участие в национальных исследовательских проектах и отвечал за несколько исследовательских контрактов между Университетом Л’Акуилы и промышленными партнерами.В настоящее время он является адъюнкт-профессором проектирования электрических машин на курсах магистратуры по электротехнике в Университете Л’Акуилы. Его исследовательские интересы сосредоточены на моделировании и проектировании электрических машин, высокоэффективных асинхронных двигателях, методах оптимизации проектирования электрических машин, анализе электродвигателей методом конечных элементов, проектировании синхронных двигателей с постоянными магнитами и реактивных двигателей для промышленных, автомобильных и аэрокосмических приложений. Он является автором более 160 технических статей в научных журналах и материалах конференций.
В 1998 году он участвовал в двух проектах SAVE, касающихся «Повышения энергоэффективности трехфазных асинхронных двигателей» и «Барьеров против ремонта энергоэффективных двигателей». Он принимал участие в национальных исследовательских проектах и отвечал за несколько исследовательских контрактов между Университетом Л’Акуилы и промышленными партнерами.В настоящее время он является адъюнкт-профессором проектирования электрических машин на курсах магистратуры по электротехнике в Университете Л’Акуилы. Его исследовательские интересы сосредоточены на моделировании и проектировании электрических машин, высокоэффективных асинхронных двигателях, методах оптимизации проектирования электрических машин, анализе электродвигателей методом конечных элементов, проектировании синхронных двигателей с постоянными магнитами и реактивных двигателей для промышленных, автомобильных и аэрокосмических приложений. Он является автором более 160 технических статей в научных журналах и материалах конференций.
Реактивный момент — обзор
9.
 3.5 Двигатель с явно выраженными постоянными магнитами (двигатель с постоянными магнитами)
3.5 Двигатель с явно выраженными постоянными магнитами (двигатель с постоянными магнитами)
ротор останавливается с прямой осью ротора, совпадающей с МДС статора, т. е. в том же положении, как если бы крутящий момент возбуждения действовал отдельно. Это связано с тем, что ось низкого сопротивления совпадает с прямой осью возбуждения. «Жесткость» характеристики крутящий момент-угол увеличивается за счет наличия реактивного крутящего момента, и в зависимости от относительных величин двух компонентов пиковый крутящий момент также может увеличиваться, как показано на рис.9.11, так что комбинация является привлекательным предложением.
Идея замены схемы возбуждения ротора более простыми постоянными магнитами при продолжении использования реактивного момента в принципе ясна, но на практике не так проста, как можно было бы ожидать. Чтобы магнитный поток протекал вдоль прямой оси ротора (т.е. вдоль выступающего полюса), необходимо вставить зазор для размещения магнита, и чем сильнее магнит, тем длиннее зазор. Это значительно увеличивает сопротивление прямой оси, что противоположно тому, что мы хотим, чтобы максимизировать момент сопротивления.
Это значительно увеличивает сопротивление прямой оси, что противоположно тому, что мы хотим, чтобы максимизировать момент сопротивления.
Однако мы уже говорили о том, что многие отрасли предпринимают шаги по снижению своей зависимости от редкоземельных магнитов из-за опасений по поводу глобальной безопасности поставок. Эта неопределенность, вместе со стимулом поставлять недорогие двигатели для растущего массового рынка (особенно в гибридных электромобилях), привели к возобновлению интереса к двигателям, которые сочетают в себе ПМ и реактивный крутящий момент. По сравнению с чисто двигателем с постоянными магнитами цель состоит в том, чтобы достичь сравнимой производительности с меньшим количеством магнитного материала: отношение крутящего момента с постоянными магнитами к крутящему моменту сопротивления значительно варьируется (обычно от 4: 1 до 1: 1) в зависимости от детальной конструкции двигателя и применение, но очень упрощенно и констатируя очевидное, чем меньше материала магнита, тем выше доля реактивного крутящего момента.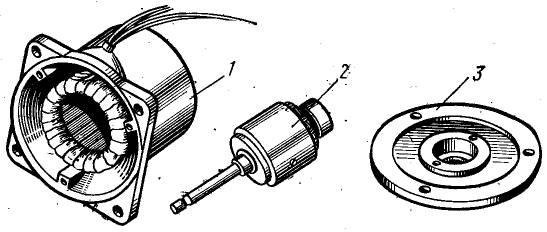
Типичный шестиполюсный ротор показан на рис. 9.12: это, по сути, ротор реактивного двигателя с магнитным полем и встроенными постоянными магнитами, установленными в магнитопроводах. Глядя, например, на самый верхний полюс N на рис. 9.12, два его магнита фактически соединены последовательно, а их прямая (потоковая) ось вертикальна. Помимо воздушного зазора, основная магнитная цепь, внешняя по отношению к каждой паре магнитов, имеет низкое магнитное сопротивление через «железо» сердечника, поэтому в этом отношении нет компромисса по сравнению с конструкцией только с PM.Однако по конструктивным причинам должна быть перемычка из материала магнитного сердечника на внешних концах магнитопроводов, и это неизбежно создает привлекательное короткое замыкание для части магнитного потока, который, таким образом, отклоняется от своего полезного пути через статор. Эта область остается насыщенной и непродуктивной с точки зрения крутящего момента.
Рис. 9.12. Шестиполюсный двигатель PM/Rel.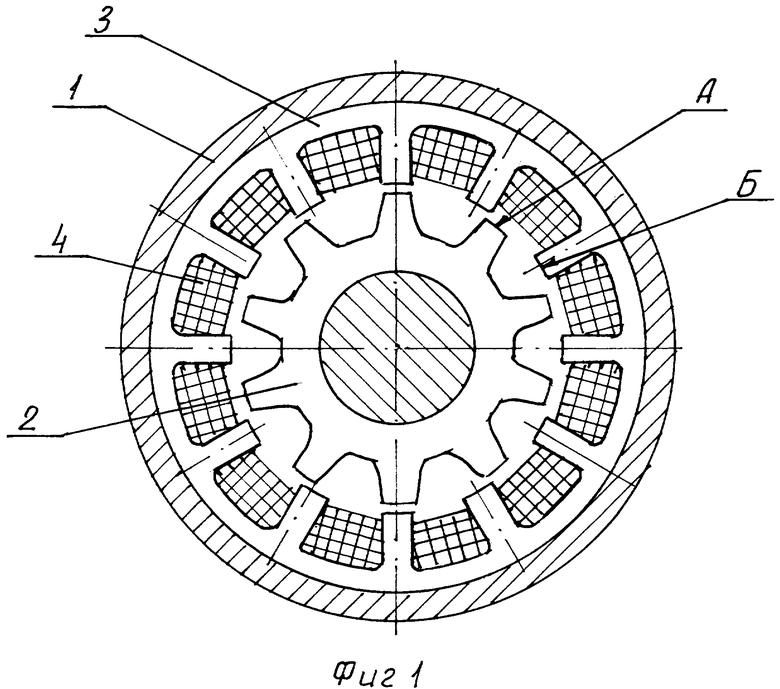
Что касается аспекта сопротивления, прямая (низкая индуктивность) ось показана пунктирными линиями, а мост, упомянутый выше, снова представляет нежелательный путь короткого замыкания для потока, создаваемого статором, но по существу это точно так же, как это было бы в реактивном двигателе, управляемом потоком.Если бы реактивный момент действовал один, ненагруженный ротор остановился бы с МДС статора. совмещен с пунктирной линией, но если бы PM действовал один, ненагруженный ротор остановился бы с полюсом N, выровненным с МДС статора. Таким образом, в отличие от двигателя с явным возбуждением ротора, где положения равновесия совпадали, теперь у нас есть два различных положения с нулевым крутящим моментом, разделенные на 90 ° (электр.).
Очевидно, что существует потенциальная путаница в отношении того, какая ось является прямой. На первый взгляд, у нас есть два соперничающих претендента с противоречивыми утверждениями: лагерь нежелания будет утверждать, что это пунктирная линия на рис. 9.12, в то время как фанаты PM утверждали бы, что это ось, проходящая через центр полюсов магнита. На практике обычно предпочтительнее последнее, т. е. прямая ось определяется так же, как и для чисто станка с ПМ.
9.12, в то время как фанаты PM утверждали бы, что это ось, проходящая через центр полюсов магнита. На практике обычно предпочтительнее последнее, т. е. прямая ось определяется так же, как и для чисто станка с ПМ.
Мы можем получить общее представление о форме общей характеристики крутящий момент-угол, наложив отдельные кривые сопротивления и PM, как показано на рис. 9.13, но мы должны признать, что это только приближение, поскольку оно игнорирует эффекты насыщения в магнитопроводах.
Рис. 9.13. Комбинированное сопротивление и крутящие моменты с постоянными магнитами.
Случай ротора с возбуждением показан на рис. 9.13 для сравнения с двигателем PM/Rel, и, как мы уже видели в разделе 9.3.4, результирующая кривая крутящий момент-угол для ротора с возбуждением более жесткая относительно стабильного нуля. положение крутящего момента, а области приведения в движение и торможения расположены симметрично, с одинаковыми максимальными углами крутящего момента для приведения в движение и торможения γ m и γ b соответственно.
Наша цель состоит в том, чтобы подчеркнуть фундаментальные различия между характеристиками крутящий момент-угол двигателя с возбужденным ротором и двигателя с постоянными магнитами, поэтому мы произвольно выбрали компоненты реактивного сопротивления и крутящего момента, чтобы они имели одинаковую амплитуду.(На практике двигатель с возбужденным ротором будет иметь гораздо меньший реактивный момент, тогда как отношение составляющих момента для двигателя с постоянными магнитами и относительным может быть выше или ниже.) стабильные рабочие области для корпуса ПМ, а также новые положения покоя с нулевым крутящим моментом. Пиковые двигательный и тормозной моменты остаются такими же, как и для возбужденного ротора, но они больше не симметричны относительно единственного положения равновесия. Максимальный угол крутящего момента двигателя обозначен как γ m , а максимальный тормозной момент показан как γ b .Следовательно, когда приводу требуется, чтобы крутящий момент изменился с максимального двигательного момента на максимальный тормозной момент, система управления (см.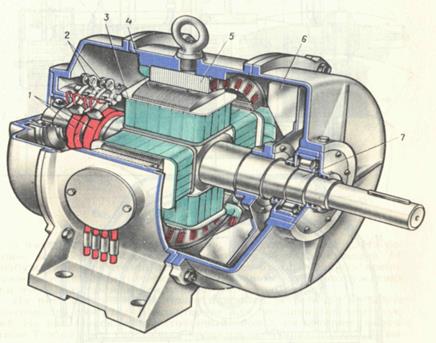 раздел 9.6) изменит положение вектора тока статора относительно ротора на угол κ, показанный на нижней диаграмме.
раздел 9.6) изменит положение вектора тока статора относительно ротора на угол κ, показанный на нижней диаграмме.
Существует еще много работы и интереса к этой новой технологии, и пройдет некоторое время, прежде чем наконец появятся оптимизированные решения для различных областей применения.
Синхронный реактивный двигатель с постоянными магнитами: альтернативный двигатель в приводах с регулируемой скоростью
Действия
‘)
var buybox = документ.querySelector(«[data-id=id_»+ метка времени +»]»).parentNode
;[].slice.call(buybox.querySelectorAll(«.вариант-покупки»)).forEach(initCollapsibles)
функция initCollapsibles(подписка, индекс) {
var toggle = подписка.querySelector(«.цена-варианта-покупки»)
подписка. classList.remove(«расширенный»)
classList.remove(«расширенный»)
var form = подписка.querySelector(«.форма-варианта-покупки»)
если (форма) {
var formAction = форма.получить атрибут («действие»)
form.setAttribute(«действие», formAction.replace(«/checkout», «/cart»))
document.querySelector(«#ecommerce-scripts»).addEventListener(«load», bindModal(form, formAction, timestamp, index), false)
}
var priceInfo = подписка.querySelector(«.Информация о цене»)
var PurchaseOption = toggle.parentElement
если (переключить && форма && priceInfo) {
переключать.setAttribute(«роль», «кнопка»)
toggle.setAttribute(«tabindex», «0»)
toggle.addEventListener («щелчок», функция (событие) {
var expand = toggle. getAttribute(«aria-expanded») === «true» || ложный
getAttribute(«aria-expanded») === «true» || ложный
toggle.setAttribute(«aria-expanded», !expanded)
form.hidden = расширенный
если (! расширено) {
покупкаВариант.classList.add («расширенный»)
} еще {
покупкаOption.classList.remove(«расширенный»)
}
priceInfo.hidden = расширенный
}, ложный)
}
}
функция bindModal (форма, formAction, метка времени, индекс) {
var weHasBrowserSupport = window.fetch && Array.from
функция возврата () {
var Buybox = EcommScripts ? EcommScripts.Ящик для покупок: ноль
var Modal = EcommScripts ? EcommScripts.Modal : ноль
if (weHasBrowserSupport && Buybox && Modal) {
var modalID = «ecomm-modal_» + метка времени + «_» + индекс
var modal = новый модальный (modalID)
modal. domEl.addEventListener («закрыть», закрыть)
domEl.addEventListener («закрыть», закрыть)
функция закрыть () {
форма.querySelector(«кнопка[тип=отправить]»).фокус()
}
форма.setAttribute(
«действие»,
formAction.replace(«/checkout», «/cart?messageOnly=1»)
)
form.addEventListener(
«Отправить»,
Buybox.interceptFormSubmit(
Буйбокс.fetchFormAction(окно.fetch),
Buybox.triggerModalAfterAddToCartSuccess(модальный),
консоль.лог,
),
ложный
)
document.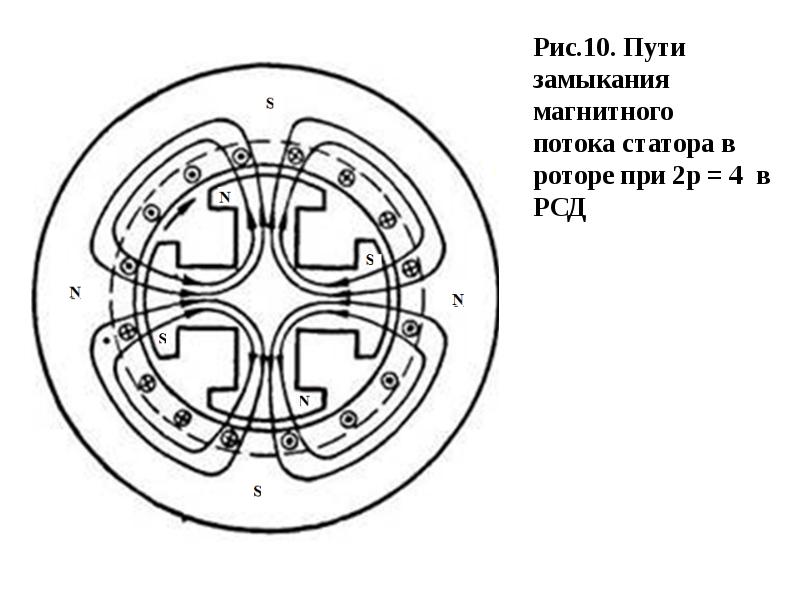 body.appendChild(modal.domEl)
body.appendChild(modal.domEl)
}
}
}
функция initKeyControls() {
документ.addEventListener(«keydown», функция (событие) {
if (document.activeElement.classList.contains(«цена-варианта-покупки») && (event.code === «Пробел» || event.code === «Enter»)) {
если (document.activeElement) {
событие.preventDefault()
документ.activeElement.click()
}
}
}, ложный)
}
функция InitialStateOpen() {
var buyboxWidth = buybox.смещениеШирина
;[].slice.call(buybox.querySelectorAll(«.опция покупки»)).forEach(функция (опция, индекс) {
var toggle = option.querySelector(«.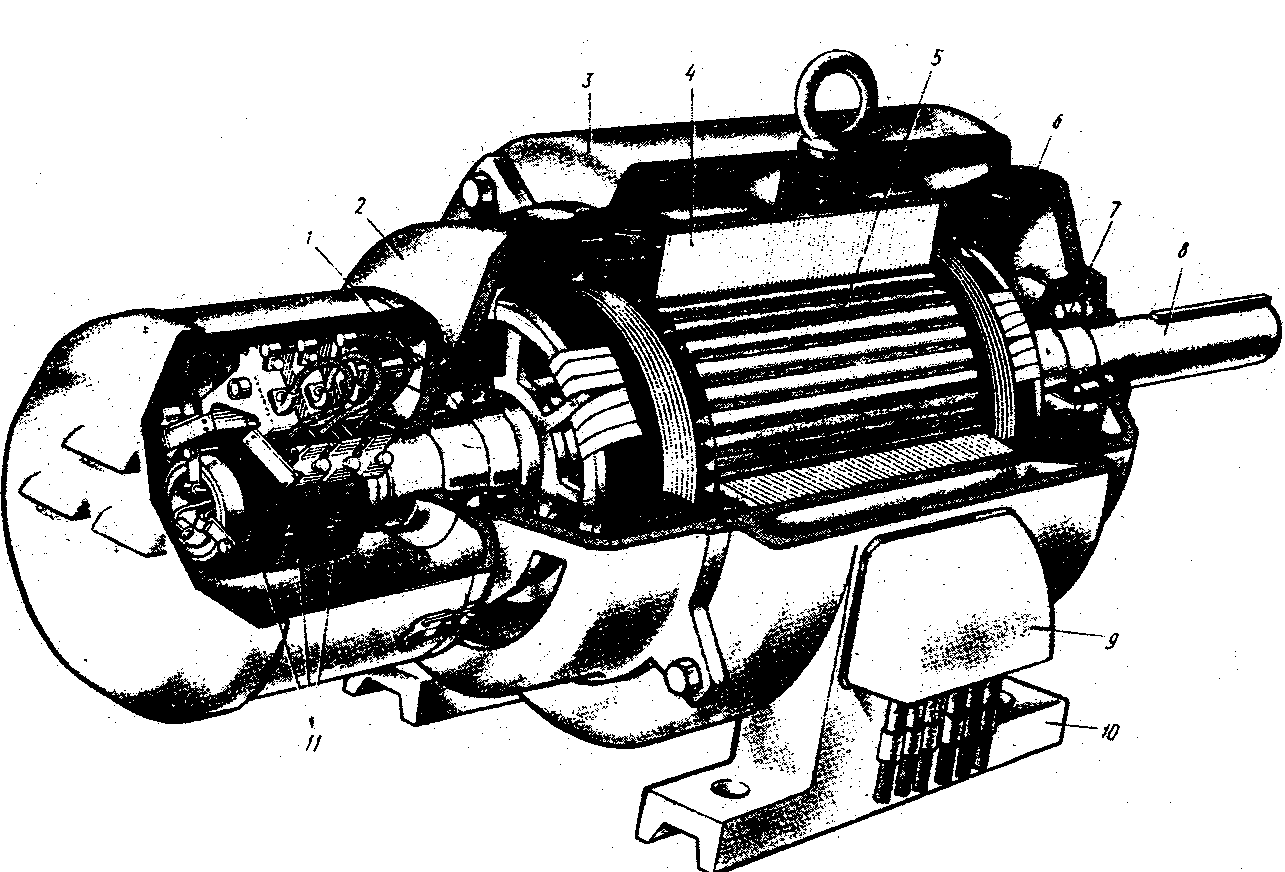 цена-варианта-покупки»)
цена-варианта-покупки»)
var form = option.querySelector(«.форма-варианта-покупки»)
var priceInfo = option.querySelector(«.Информация о цене»)
если (buyboxWidth > 480) {
переключить.щелчок()
} еще {
если (индекс === 0) {
переключать.щелчок()
} еще {
toggle.setAttribute («ария-расширенная», «ложь»)
form.hidden = «скрытый»
priceInfo.hidden = «скрытый»
}
}
})
}
начальное состояниеОткрыть()
если (window.buyboxInitialized) вернуть
window.buyboxInitialized = истина
initKeyControls()
})()
Прорыв в синхронном реактивном двигателе | упаковкадайджест.
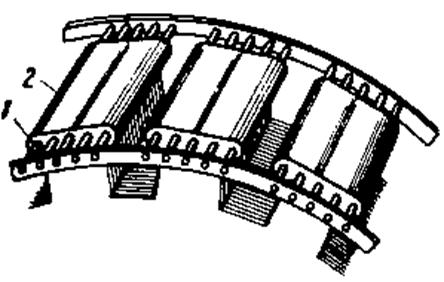 ком
ком
Сочетая в себе преимущества двигателей с постоянными магнитами и асинхронных двигателей, новые синхронные реактивные двигатели (SynRM) предлагают потенциально революционную технологию для приводов с регулируемой скоростью (ЧРП) и комплектов двигателей. В новых двигателях используется инновационная конструкция ротора, которая устраняет потери на скольжение, присущие асинхронным двигателям, и предлагает преимущества работы с постоянными магнитами.
«Ключевыми тенденциями в отрасли, связанными с электродвигателями, а также тем, что ценят клиенты и рынок, являются энергоэффективность, уменьшение габаритов и занимаемой площади и надежность», — говорит Пану Виролайнен, руководитель отдела исследований и разработок ABB’ Discrete Automation. и отдел движения.
«Новая технология привода синхронного реактивного двигателя предлагает преимущества именно в этих трех областях. Она обеспечивает повышенную эффективность по сравнению со стандартными асинхронными двигателями, возможность перехода на более высокую удельную мощность и более высокую надежность, включая более длительные интервалы обслуживания. можно получить эти преимущества».
можно получить эти преимущества».
Компания АББ недавно представила две линейки двигателей на базе этих двигателей. Один предназначен для работы на «премиальном» уровне эффективности, который, вероятно, определен в спецификации IE4.Другой оптимизирован для обеспечения высокой производительности в небольшом корпусе.
Оке Андерссон, технический менеджер ABB, сказал, что первые высокоэффективные комплекты электроприводов будут доступны с выходной мощностью 11–200 кВт (1500–3000 об/мин) и типоразмерами IEC 160–315. В модельном ряду с высокой выходной мощностью будут предлагаться пакеты мощностью до 355 кВт (1500–3000 об/мин).
С точки зрения аппаратного обеспечения приводы ACS850, предлагаемые в составе пакетов, точно такие же, как и стандартные приводы.Единственным изменением является поддержка с точки зрения алгоритма управления за счет добавления синхронных реактивных двигателей.
Компания АББ адаптировала свои алгоритмы прямого управления крутящим моментом (DTC) для поддержки двигателей SynRM, чтобы удерживать ток привода на минимальном уровне для каждой рабочей точки при максимальной производительности двигателя. Привод ACS850 с поддержкой синхронных реактивных двигателей последовательно внедряется по всему миру и предлагается в комплекте с двигателями SynRM.
Привод ACS850 с поддержкой синхронных реактивных двигателей последовательно внедряется по всему миру и предлагается в комплекте с двигателями SynRM.
«Супер-премиальная эффективность пакета очень важна, но высокопроизводительный пакет также имеет преимущества для клиентов OEM или машиностроителей», — говорит Виролайнен. «Эти компактные решения обеспечивают значительно меньшие размеры двигателей [до двух типоразмеров] при той же мощности и крутящем моменте».
Чтобы создать меньший по размеру и более эффективный двигатель с длительным сроком службы и меньшими затратами на техническое обслуживание, а также новый тип двигателя, который можно было бы адаптировать для работы с частотно-регулируемым приводом, ABB заявляет, что рассмотрела все свои технологические возможности.
Пуск двигателя с частотным преобразователем сильно отличается от пуска с прямым подключением, но это открывает возможности для упрощения конструкции двигателя и повышения эффективности. Синхронные двигатели с четырехполюсным ротором, работающие на частоте 50 Гц, вращаются синхронно с питанием со скоростью ровно 1500 об/мин. Соответствующий асинхронный двигатель имеет потери на скольжение и вращается со скоростью всего 1475 об/мин (30 кВт). В современных асинхронных двигателях с короткозамкнутой клеткой ротора потери, связанные с ротором, составляют 20—35 % от общих потерь двигателя.
Синхронные двигатели с четырехполюсным ротором, работающие на частоте 50 Гц, вращаются синхронно с питанием со скоростью ровно 1500 об/мин. Соответствующий асинхронный двигатель имеет потери на скольжение и вращается со скоростью всего 1475 об/мин (30 кВт). В современных асинхронных двигателях с короткозамкнутой клеткой ротора потери, связанные с ротором, составляют 20—35 % от общих потерь двигателя.
В качестве высокоэффективного решения технология синхронного реактивного двигателя основана на концепции магнитного сопротивления или магнитного сопротивления. Ротор спроектирован так, чтобы создавать минимально возможное сопротивление в одном направлении и максимальное сопротивление в перпендикулярном направлении.
Двигатель создает крутящий момент, когда ротор пытается совместить направление магнитной проводимости с полем статора. На практике это означает новую технологию синхронного двигателя, в которой ротор вращается с той же частотой, что и поле статора.
«На стороне ротора двигателя мы можем устранить так называемые потери на проскальзывание, которые существуют в асинхронных двигателях», — говорит Виролайнен. «Эти потери со стороны ротора являются важной частью общих потерь двигателя, поэтому их устранение повышает эффективность. Мы можем уменьшить потери до 40 процентов, в зависимости от номинальной мощности двигателя, и повысить эффективность до 5 процентов в двигателях меньшей мощности и 0,5 процента в двигателях с самой большой рамой, что позволяет нам соответствовать грядущему классу эффективности IE4 в Европе.»
Из-за меньших потерь на стороне ротора конструкция двигателей SynRM позволяет уменьшить их размеры и увеличить мощность до 40 процентов при любом размере двигателя. Это два основных преимущества этой технологии.
Другие преимущества связаны с надежностью. Сама конструкция ротора прочная, со стороны ротора нет беличьей клетки или магнитов. Благодаря низким потерям рабочая температура двигателя также ниже, что увеличивает срок службы изоляции и подшипников.
«Если мы сравним новые двигатели с другими технологиями синхронных двигателей с постоянными магнитами, в них нет магнитов и нет риска потери производительности из-за размагничивания в результате перегрева или отказа», — говорит Виролайнен. «Нет напряжения противо-ЭДС, вызванного вращающимся двигателем, что может быть проблемой безопасности, а из-за синхронного вращения регулирование скорости по своей природе является точным и не требует дополнительных энкодеров».
Основным нововведением является конструкция ротора, поскольку сторона статора двигателя идентична асинхронному двигателю.Знания и опыт компании АББ помогли ей создать прочный и эффективный ротор, способный работать на высоких скоростях. Но приводная технология и согласованные мотор-приводные блоки и приводные алгоритмы делают системный прорыв возможным с технологической точки зрения.
Технология синхронного реактивного сопротивления во многом сочетает в себе преимущества асинхронных двигателей и двигателей с постоянными магнитами.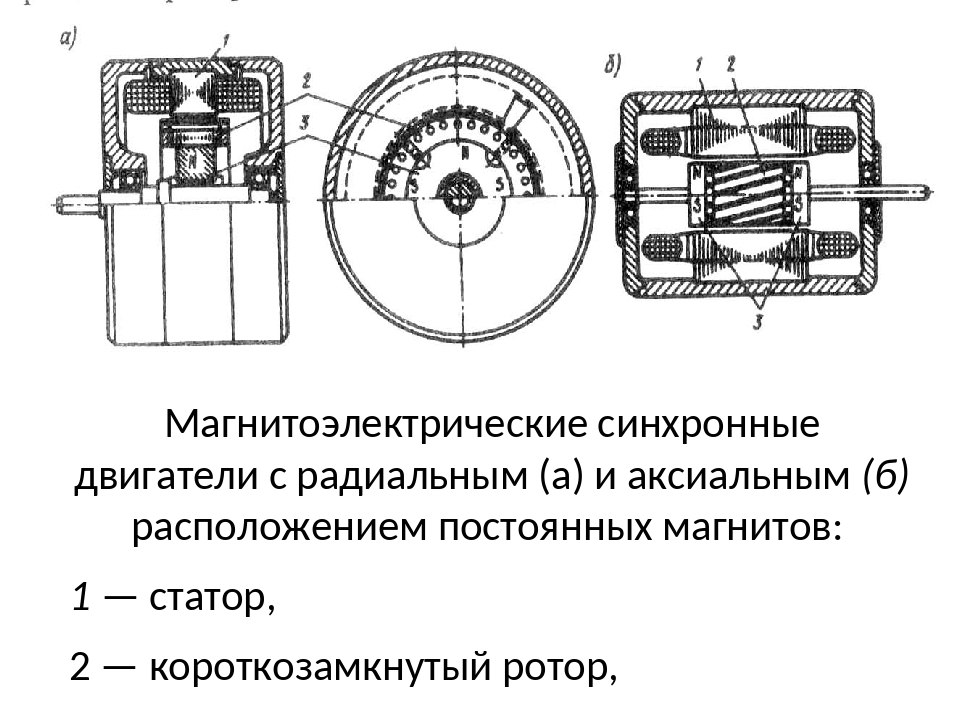 Он обеспечивает надежность асинхронного двигателя, а также преимущества размера, эффективности и синхронной скорости работы двигателя с постоянными магнитами, устраняя проблемы, связанные с технологией постоянного магнита.
Он обеспечивает надежность асинхронного двигателя, а также преимущества размера, эффективности и синхронной скорости работы двигателя с постоянными магнитами, устраняя проблемы, связанные с технологией постоянного магнита.
Основные преимущества этой технологии, включая размер, эффективность и надежность, являются общими и применимы в самых разных областях, но насосы, вентиляторы и компрессоры являются одними из основных приложений. Например, малоинерционный ротор позволяет обеспечить высокую скорость линейного изменения скорости, которая может быть полезна для кранов и подъемников.
.