Регуляторы частоты — Каталог
Преобразователь частоты PROSTAR Pr6000
Преобразователи частоты PR6000 являются высокотехнологичными устройствами, обладающие высокой точностью, широким диапазоном регулирования и развивающие высокий момент на валу электродвигателя. С помощью частотного преобразователя можно осуществлять регулирование производительности вентилятора, плавный пуск, защиту от перегрузок, задание скорости вращения вентилятора при помощи аналогового сигнала 0…10В, 4…20мА от удаленного управляющего источника или при помощи потенциометра.
Трансформаторный регулятор оборотов
Работа трансформаторных регуляторов скорости основана на использовании автотрансформатора для управления напряжением питания электродвигателя. Он предназначен для регулирования скорости вращения электродвигателя вентилятора, насоса и т.д., управляемых напряжением. Допускается управление несколькими двигателями, если общий потребляемый ток двигателей не превышает номинального тока регулятора.
Трансформаторные 5-ступенчатые устройства управления 1~ 230 В альтернативно с 2 отдельными 5-ступенчатыми выключателями
Управление частотой вращения одного или нескольких управляемых по напряжению вентиляторов.
Основные технические характеристики:
— напряжение сети 1~ 230 В, 50/60 Гц;
— выход 65-110-135-170-230 В;
— встроенная лампа сигнализации работы технологического оборудования;
— после отказа сети автоматическое повторное включение;
— дополнительный выход напряжения 230 В, макс. 1 A;
— макс. температура окружающей среды +40°С;
— производство ZIEHL-ABEGG, Германия.
Трансформаторные 5-ступенчатые устройства управления 3~ 400 В
Управление частотой вращения одного или нескольких управляемых по напряжению 3~ вентиляторов.
Основные технические характеристики:
— напряжение сети 3~ 400 В, 50/60 Гц;
— выход 95-145-190-240-400 В;
— встроенная лампа сигнализации работы технологического оборудования;
— после отказа сети автоматическое повторное включение;
- — дополнительный выход напряжения, у R-D-1…7 230 В, макс. 1 A;
— макс. температура окружающей среды +40°С;
— производство ZIEHL-ABEGG, Германия.
Частотные преобразователи для асинхронных двигателей | Частотник для электродвигателя
Декабрь 19, 2017
Эффективность функционирования электромоторов асинхронного типа во многом определяется эффективностью управления ими. Ведь от того, насколько плавно и гибко можно менять скорость вращения ротора, зависит многое: точность работы и ее продуктивность, потребление энергии, степень механического износа, общая безопасность устройства и т. д. Потому к выбору аппаратуры для контроля нужно подходить очень ответственно. И если изучить все варианты, преобразователь частоты для асинхронного двигателя сможет обеспечить лучший функционал. Что это за регулятор, какие у него преимущества и как его выбрать?
д. Потому к выбору аппаратуры для контроля нужно подходить очень ответственно. И если изучить все варианты, преобразователь частоты для асинхронного двигателя сможет обеспечить лучший функционал. Что это за регулятор, какие у него преимущества и как его выбрать?
Зачем нужно преобразовывать частоту тока?
Асинхронный электродвигатель, использующий переменный ток, имеет целый ряд плюсов перед аналогом на постоянном токе – но есть минусы. Прежде всего речь о сложности плавных старта, регулировки скорости во время работы и остановки, что особенно критично для мощных и крупных двигателей. Технологий, которые призваны решить такую задачу, создано немало: от механических вариаторов до гидравлических муфт. Но они сложны, дорогие и с узким диапазоном регулировок, которые еще и меняются ступенчато. На этом фоне частотные преобразователи для асинхронных двигателей – лучшее решение. Это электронные устройства, состоящие из трех ключевых компонентов: выпрямителя промышленного тока на 50 (60) Гц, инвертора для превращения созданного прямого тока в переменный, но нужной частоты, и микропроцессора, управляющего системой. В таком случае возможно менять частоту тока плавно и в широчайшем диапазоне: от 1 до 800 Гц – а с ней и скорость вращения ротора в моторе. На практике это означает, что регулятор обладает следующими преимуществами:
В таком случае возможно менять частоту тока плавно и в широчайшем диапазоне: от 1 до 800 Гц – а с ней и скорость вращения ротора в моторе. На практике это означает, что регулятор обладает следующими преимуществами:
- частотное регулирование в некоторых случаях позволяет значительно экономить электроэнергию – до 50%;
- асинхронный преобразователь частоты может иметь КПД до 98% (в частности: Danfoss), что говорит о высокой эффективности приборов;
- повышение качества и количества производимого продукта за счет лучшего подбора режима работы двигателя;
- уменьшение нагрузки на детали электромотора, особенно во время старта, когда пусковые токи максимальны.
Какими бывают преобразователи частоты для асинхронного двигателя?
При выборе частотного преобразователя основное – определиться с типом данного оборудования. Все эти устройства делятся на несколько групп в зависимости от следующих особенностей:
1. Частотники по способу преобразования частоты
Схема частотного преобразователя для асинхронного двигателя строится по одному из следующих принципов работы привода:
- Непосредственная связь.
 При подключении обмотки электромотора к сети контроллер задействует отдельные группы тиристоров. Это относительно простая конструкция, но у нее есть частота выходного напряжения, которая не может быть выше входного, диапазон вращения двигателя узкий (до 1 к 10), и синусоида частоты получается «грязная», из-за чего в сети появляются помехи, а двигатель может перегреваться.
При подключении обмотки электромотора к сети контроллер задействует отдельные группы тиристоров. Это относительно простая конструкция, но у нее есть частота выходного напряжения, которая не может быть выше входного, диапазон вращения двигателя узкий (до 1 к 10), и синусоида частоты получается «грязная», из-за чего в сети появляются помехи, а двигатель может перегреваться. - Выраженное промежуточное звено постоянного тока. В таких аппаратах напряжение выпрямляется, фильтруется и сглаживается, а затем через инвертор обращается в переменное с нужными характеристиками. Данный подход ведет к некоторой потере КПД и увеличению размера устройства, но это компенсируется плюсами: гибкостью управления и работой с большими токами. Такая техника – самая распространенная.
 При подключении обмотки электромотора к сети контроллер задействует отдельные группы тиристоров. Это относительно простая конструкция, но у нее есть частота выходного напряжения, которая не может быть выше входного, диапазон вращения двигателя узкий (до 1 к 10), и синусоида частоты получается «грязная», из-за чего в сети появляются помехи, а двигатель может перегреваться.
При подключении обмотки электромотора к сети контроллер задействует отдельные группы тиристоров. Это относительно простая конструкция, но у нее есть частота выходного напряжения, которая не может быть выше входного, диапазон вращения двигателя узкий (до 1 к 10), и синусоида частоты получается «грязная», из-за чего в сети появляются помехи, а двигатель может перегреваться.
2. Частотники по способу регуляции
Управление асинхронным преобразователем частоты может быть двух типов:
- Скалярное. Соотношение входного и выходного напряжения в этом случае задается уже на заводе в виде фиксированных параметров. Себестоимость решения минимальная, но и возможности регулировки небольшие – с таким оборудованием можно управлять электромоторами компрессоров, насосов, вентиляторов и т.п., но не более.
- Векторное. В частотном преобразователе этой конструкции регуляционные каналы скорости вращения разделены. Потому устройство выходит более сложным и дорогим. Но диапазон регулировок фактически неограниченный: режим работы можно менять очень точно, как в модели VLT Micro Drive FC-51, что пригодится в станках, кранах, лифтах и т.п.
 Себестоимость решения минимальная, но и возможности регулировки небольшие – с таким оборудованием можно управлять электромоторами компрессоров, насосов, вентиляторов и т.п., но не более.
Себестоимость решения минимальная, но и возможности регулировки небольшие – с таким оборудованием можно управлять электромоторами компрессоров, насосов, вентиляторов и т.п., но не более.
Какие характеристики преобразователей важны?
Какой бы тип устройства вы ни выбирали, стоит обратить внимание на следующие параметры:
- Мощность. Она должна соответствовать мощности электродвигателя, но с запасом не менее 15% – это убережет технику при перегрузке. Это правило справедливо и для пикового тока: устройство должно иметь такую цифру на 10% больше указанного.
- Входы и выходы. Используются для управления и диагностики регулятора – и чем их больше, тем лучше. При этом они нужны разные: аналоговые (для ввода сигналов обратной связи), цифровые (для ввода данных с датчиков) и дискретные (для команд и обратных сообщений).
- Безопасность. Частотные преобразователи для асинхронных двигателей должны обеспечивать минимальный риск повреждения техники, самих себя, а также людей. Защищенный по норме IP корпус, экранированная проводка, термопаста на платах, защита от перегрузки и т.п. – мелочей тут нет.
 При этом они нужны разные: аналоговые (для ввода сигналов обратной связи), цифровые (для ввода данных с датчиков) и дискретные (для команд и обратных сообщений).
При этом они нужны разные: аналоговые (для ввода сигналов обратной связи), цифровые (для ввода данных с датчиков) и дискретные (для команд и обратных сообщений).
Впрочем, лучше сэкономить время и силы – и обратиться за помощью в компанию «Югов-Проект». Ее специалисты обязательно помогут с выбором оптимального для ваших задач преобразователя частоты из каталога бренда Danfoss, который является одним из ведущих мировых производителей электрооборудования. Эти устройства надежные, функциональные и продаются у нас по выгодной цене.
Регулятор частоты вращения вентилятора ARW 3.
Параметры упакованного товара Единица товара: Штука Длина, мм: 200 Произведено
* Производитель оставляет за собой право без уведомления дилера менять характеристики, внешний вид, комплектацию товара и место его производства. Указанная информация не является публичной офертой Отзывы о регуляторе частоты вращения Volcano ARW 3.
Оставить свой отзыв На данный момент для этого товара нет расходных материалов Способы получения товара в МосквеДоставка Вес брутто товара: 2 кг В каком городе вы хотите получить товар? выберите городАбаканАксайАктауАлександровАльметьевскАнадырьАнгарскАрзамасАрмавирАрсеньевАртемАрхангельскАстраханьАхтубинскАчинскБалаковоБалашовБалезиноБарнаулБатайскБелгородБелогорскБерезникиБийскБиробиджанБлаговещенскБодайбоБокситогорскБорБорисоглебскБратскБрянскБугульмаБугурусланБуденновскБузулукВеликие ЛукиВеликий НовгородВеликий УстюгВельскВитебскВладивостокВладикавказВладимирВолгоградВолгодонскВолжскВолжскийВологдаВолховВольскВоркутаВоронежВоскресенскВыборгВыксаВышний ВолочекВязьмаВятские ПоляныГеоргиевскГлазовГорно-АлтайскГрозныйГубкинскийГусь-ХрустальныйДальнегорскДедовскДербентДзержинскДимитровградДмитровДонецкДудинкаЕвпаторияЕгорьевскЕкатеринбургЕлецЕссентукиЗаводоуковскЗеленодольскЗлатоустЗубовоИвановоИгнатовоИжевскИзбербашИнтаИркутскИшимЙошкар-ОлаКазаньКалининградКалугаКаменск-УральскийКаменск-ШахтинскийКамень-на-ОбиКанашКанскКарагандаКарасукКаргопольКемеровоКерчьКинешмаКиришиКировКиселевскКисловодскКлинКлинцыКоломнаКолпашевоКомсомольск-на-АмуреКоролевКостромаКотласКраснодарКрасноярскКропоткинКудьмаКузнецкКуйбышевКумертауКунгурКурганКурскКызылЛабинскЛабытнангиЛаговскоеЛангепасЛенинск-КузнецкийЛесосибирскЛипецкЛискиЛуневоЛюдиновоМагаданМагнитогорскМайкопМалые КабаныМахачкалаМеждуреченскМиассМинскМихайловкаМичуринскМоскваМуравленкоМурманскМуромНабережные ЧелныНадымНазраньНальчикНаро-ФоминскНарьян-МарНаходкаНевинномысскНерюнгриНефтекамскНефтеюганскНижневартовскНижнекамскНижний НовгородНижний ТагилНовая ЧараНовозыбковНовокузнецкНовороссийскНовосибирскНовочебоксарскНовочеркасскНовый УренгойНогинскНорильскНоябрьскНурлатНяганьОбнинскОдинцовоОзерскОктябрьскийОмскОнегаОрелОренбургОрехово-ЗуевоОрскПавлодарПангодыПензаПермьПетрозаводскПетропавловскПетропавловск-КамчатскийПикалевоПлесецкПолярныйПригородноеПрокопьевскПсковПятигорскРеутовРоссошьРостов-на-ДонуРубцовскРыбинскРязаньСалаватСалехардСамараСанкт-ПетербургСаранскСарапулСаратовСаянскСвободныйСевастопольСеверныйСеверобайкальскСеверодвинскСеверскСерпуховСимферопольСлавянск-на-КубаниСмоленскСоликамскСочиСтавропольСтарый ОсколСтерлитамакСургутСызраньСыктывкарТаганрогТаксимоТамбовТаштаголТверьТихвинТихорецкТобольскТольяттиТомскТуапсеТулаТуркестанТюменьУдомляУлан-УдэУльяновскУрайУральскУрюпинскУсинскУсолье-СибирскоеУссурийскУсть-ИлимскУсть-КутУсть-ЛабинскУфаУхтаФеодосияХабаровскХанты-МансийскХасавюртЧайковскийЧебоксарыЧелябинскЧеремховоЧереповецЧеркесскЧитаЧусовойШарьяШахтыЭлектростальЭлистаЭнгельсЮгорскЮжно-СахалинскЯкутскЯлтаЯлуторовскЯрославль Самовывоз: бесплатно
 716292]» data-short-name=»м. Авиамоторная» data-all-goods-available=»0″> м.Авиамоторная, 716292]» data-short-name=»м. Авиамоторная» data-all-goods-available=»0″> м.Авиамоторная,2-й Кабельный проезд, д. 1 пн. – пт.: 10:00 – 19:00 сб. – вс.: 10:00 – 18:00 В корзину  656776,37.618805]» data-short-name=»м. Варшавская» data-all-goods-available=»0″> м.Варшавская, 656776,37.618805]» data-short-name=»м. Варшавская» data-all-goods-available=»0″> м.Варшавская,Варшавское шоссе, д. 72к2 пн. – вс.: 9:00 – 20:00 В корзину  511335,37.574057]» data-short-name=»ул. 40 лет Октября, д. 14А» data-all-goods-available=»0″> м.МЦД D2 Щербинка, 511335,37.574057]» data-short-name=»ул. 40 лет Октября, д. 14А» data-all-goods-available=»0″> м.МЦД D2 Щербинка,г. Щербинка, ул. 40 лет Октября, д. 14А пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  983132,37.142229]» data-short-name=»Андреевка, ул. Жилинская, стр. 1″ data-all-goods-available=»0″> 983132,37.142229]» data-short-name=»Андреевка, ул. Жилинская, стр. 1″ data-all-goods-available=»0″>Московская обл., р.п. Андреевка, ул. Жилинская, стр. 1 пн. – вс.: 10:00 – 21:00 В корзину 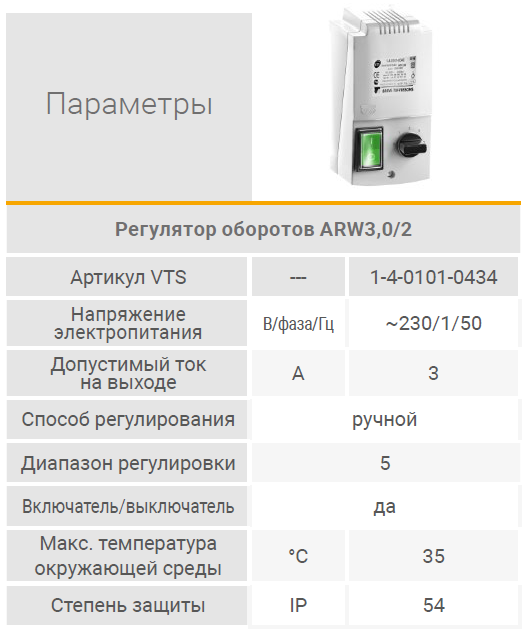 817043]» data-short-name=»м. Новогиреево» data-all-goods-available=»0″> м.Новогиреево, 817043]» data-short-name=»м. Новогиреево» data-all-goods-available=»0″> м.Новогиреево,проспект Свободный, д. 16Ас2 пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  849959,37.669992]» data-short-name=»м. Свиблово» data-all-goods-available=»0″> м.Свиблово (платформа Северянин), 849959,37.669992]» data-short-name=»м. Свиблово» data-all-goods-available=»0″> м.Свиблово (платформа Северянин),ул. Енисейская, д. 1, стр. 1 пн. – вс.: 9:00 – 20:00 В корзину 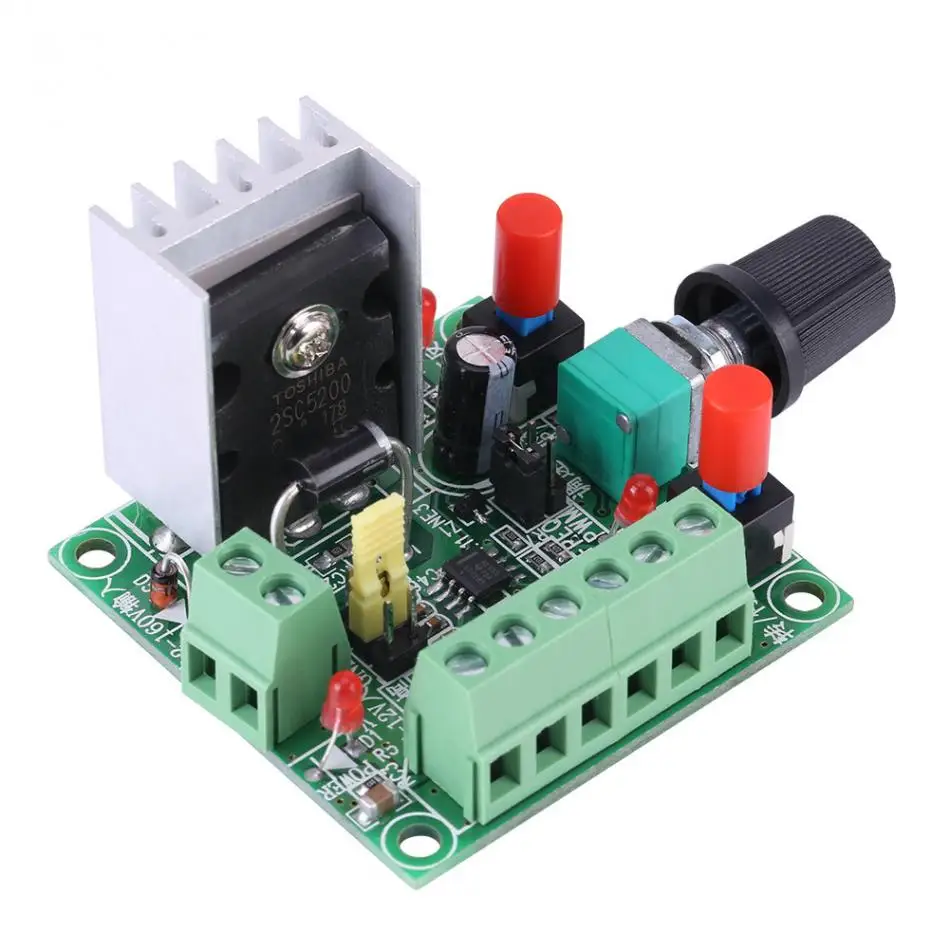 415891,38.284122]» data-short-name=»ул. Советская, д. 155с1″ data-all-goods-available=»0″> 415891,38.284122]» data-short-name=»ул. Советская, д. 155с1″ data-all-goods-available=»0″>г. Бронницы, ул. Советская, д. 155с1 пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину 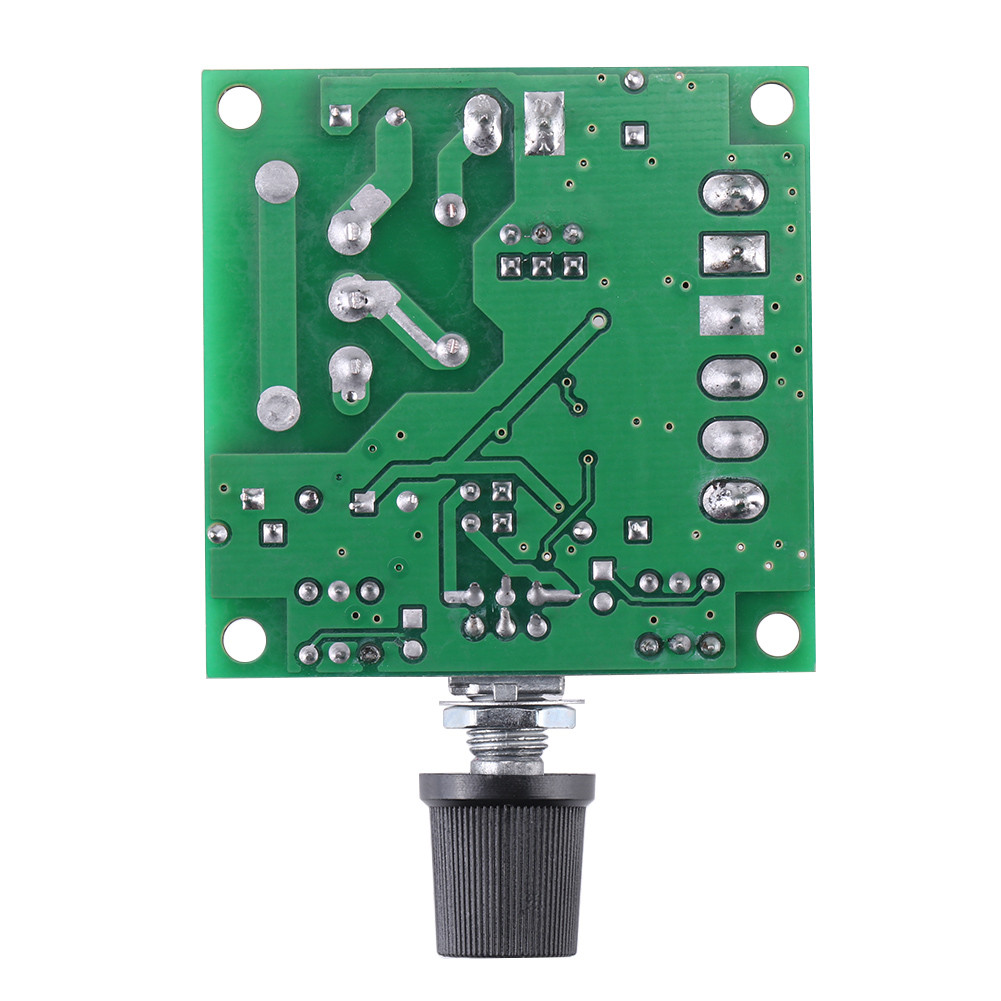 7″ data-all-goods-available=»0″> 7″ data-all-goods-available=»0″>г. Дмитров, пер. Вокзальный, д. 7 пн. – вс.: 9:00 – 20:00 В корзину  369111,39.067714]» data-short-name=»ш. Касимовское, 1А» data-all-goods-available=»0″> 369111,39.067714]» data-short-name=»ш. Касимовское, 1А» data-all-goods-available=»0″>г. Егорьевск, ш. Касимовское, д. 1А пн. – вс.: 9:00 – 21:00 В корзину  331471,36.731602]» data-short-name=»ул. Гагарина, д. 31/36″ data-all-goods-available=»0″> 331471,36.731602]» data-short-name=»ул. Гагарина, д. 31/36″ data-all-goods-available=»0″>г. Клин, ул. Гагарина, д. 31/36 пн. – вс.: 9:00 – 20:00 В корзину  685162,37.897501]» data-short-name=»ул. Инициативная д. 7с2″ data-all-goods-available=»0″> 685162,37.897501]» data-short-name=»ул. Инициативная д. 7с2″ data-all-goods-available=»0″>г. Люберцы, ул. Инициативная, д. 7с2 пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  12, корп. 1″ data-all-goods-available=»0″> 12, корп. 1″ data-all-goods-available=»0″>г. Мытищи, Новомытищинский пр-т, д. 12, корп. 1 пн. – вс.: 9:00 – 20:00 В корзину  426854,37.498686]» data-short-name=»ул. Ленинградская, д. 10А» data-all-goods-available=»0″> 426854,37.498686]» data-short-name=»ул. Ленинградская, д. 10А» data-all-goods-available=»0″>г. Подольск, ул. Ленинградская, д. 10А пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  , вл. 16 Б» data-all-goods-available=»0″> , вл. 16 Б» data-all-goods-available=»0″>г. Химки, Ленинградская ул., вл. 16 Б пн. – вс.: 9:00 – 20:00 В корзину Сервис от ВсеИнструменты.
Мы предлагаем уникальный сервис по обмену, возврату и ремонту товара! Обратиться по обмену, возврату или сдать инструмент в ремонт вы можете в любом магазине или ПВЗ ВсеИнструменты.ру. | Может понадобиться |
 0 Volcano 1-4-0101-0434 используется для ручного регулирования скорости вращения тепловентиляторов Volcano.
0 Volcano 1-4-0101-0434 используется для ручного регулирования скорости вращения тепловентиляторов Volcano. 0 1-4-0101-0434
0 1-4-0101-0434 Котельники, Яничкин проезд, д. 3 В магазине >10 шт., забирайте сегодня В корзину
Котельники, Яничкин проезд, д. 3 В магазине >10 шт., забирайте сегодня В корзину 54 По предзаказу на завтра, после 11:00 В корзину
54 По предзаказу на завтра, после 11:00 В корзину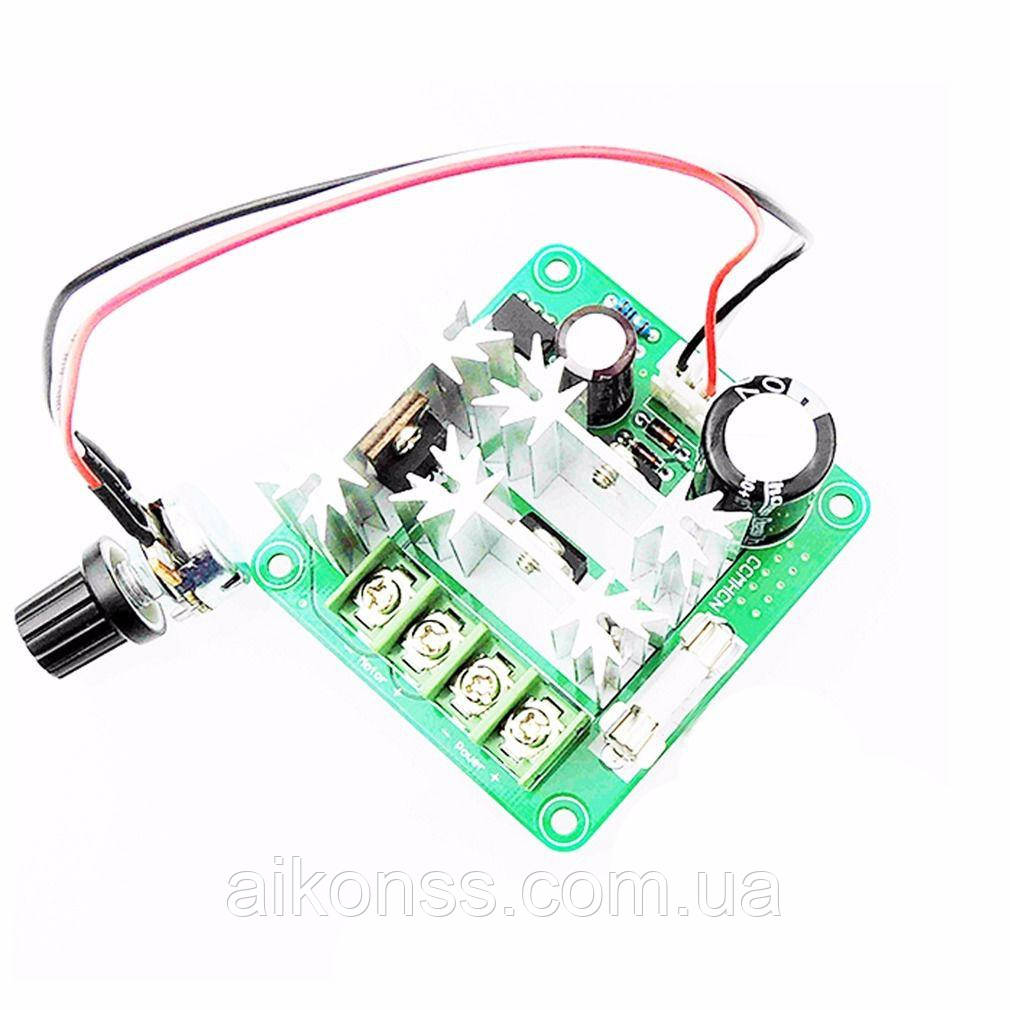 29 По предзаказу на завтра, после 11:00 В корзину
29 По предзаказу на завтра, после 11:00 В корзину МЦД D2 Нахабино, пгт Нахабино, ул. Институтская, д. 17 По предзаказу на завтра, после 11:00 В корзину
МЦД D2 Нахабино, пгт Нахабино, ул. Институтская, д. 17 По предзаказу на завтра, после 11:00 В корзину Нагатинская, Варшавское шоссе, д. 26с32 По предзаказу на завтра, после 11:00 В корзину
Нагатинская, Варшавское шоссе, д. 26с32 По предзаказу на завтра, после 11:00 В корзину Октябрьское поле, ул. Народного Ополчения, д. 48 корп.1 По предзаказу на завтра, после 14:00 В корзину
Октябрьское поле, ул. Народного Ополчения, д. 48 корп.1 По предзаказу на завтра, после 14:00 В корзину Свиблово (платформа Северянин), ул. Енисейская, д. 1, стр. 1 По предзаказу на завтра, после 11:00 В корзину
Свиблово (платформа Северянин), ул. Енисейская, д. 1, стр. 1 По предзаказу на завтра, после 11:00 В корзину Университет, Ломоносовский проспект, д. 5 По предзаказу на завтра, после 11:00 В корзину
Университет, Ломоносовский проспект, д. 5 По предзаказу на завтра, после 11:00 В корзину Дмитров, пер. Вокзальный, д. 7 По предзаказу на завтра, после 11:00 В корзину
Дмитров, пер. Вокзальный, д. 7 По предзаказу на завтра, после 11:00 В корзину Звенигород, ул. Московская, д. 24 По предзаказу на завтра, после 11:00 В корзину
Звенигород, ул. Московская, д. 24 По предзаказу на завтра, после 11:00 В корзину Королев, проспект Королева, д. 6Г По предзаказу на завтра, после 11:00 В корзину
Королев, проспект Королева, д. 6Г По предзаказу на завтра, после 11:00 В корзину Мытищи, Новомытищинский пр-т, д. 12, корп. 1 По предзаказу на завтра, после 11:00 В корзину
Мытищи, Новомытищинский пр-т, д. 12, корп. 1 По предзаказу на завтра, после 11:00 В корзину 23 По предзаказу на завтра, после 11:00 В корзину
23 По предзаказу на завтра, после 11:00 В корзину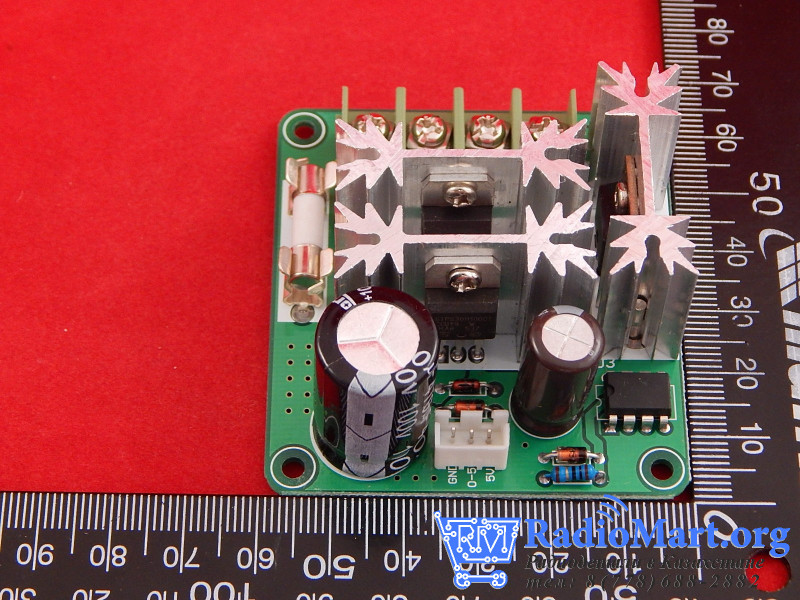 Серпухов, ул. Ворошилова, д. 82 По предзаказу на завтра, после 11:00 В корзину
Серпухов, ул. Ворошилова, д. 82 По предзаказу на завтра, после 11:00 В корзину Чехов, Вишневый бульвар, д. 3-1 По предзаказу на завтра, после 11:00 В корзину
Чехов, Вишневый бульвар, д. 3-1 По предзаказу на завтра, после 11:00 В корзину Багратионовская,
Багратионовская, Выхино,
Выхино, Коломенская,
Коломенская, 116Д
116Д Озерная,
Озерная, 2с2
2с2 Скобелевская,
Скобелевская, 5
5 – пт.: 9:00 – 20:00
– пт.: 9:00 – 20:00 6Г
6Г – пт.: 9:00 – 20:00
– пт.: 9:00 – 20:00.jpg) Сергиев Посад, проспект Красной Армии, д. 209
Сергиев Посад, проспект Красной Армии, д. 209 – вс.: 9:00 – 20:00
– вс.: 9:00 – 20:00 Чехов, Вишневый бульвар, д. 3-1
Чехов, Вишневый бульвар, д. 3-1 ру
руТонгенератор (Онлайн воспроизведение звука на определенной заданной Вами частоте и громкости. Используется для настройки звучания или тестирования акустики/сабвуфера)
Главная • Сервисы • Тонгенератор (Онлайн воспроизведение звука на определенной заданной Вами частоте и громкости. Используется для настройки звучания или тестирования акустики/сабвуфера)
Как пользоваться тонгенератором для установки нужной частоты среза на регуляторе фильтра усилителя.
Для начала на вход усилителя нужно подать аудиосигнал с устройства (ПК, смартфон и т.д.), подключенного к интернету и воспроизводящего звук.
Все остальные устройства от входа усилителя нужно отключить.
Убедившись, что звук с подключенного к усилителю устройства воспроизводится можно начинать настройку фильтров усилителя.
Рассмотрим настройку фильтров усилителя на примере двухполосной системы, построенной на поканальном подключении к 4-х канальному усилителю.
Допустим, высокочастотники (твитера) подключены на выходы усилителя 1 и 2. Подключаем на соответствующие входы усилителя тонренератор.
Если твитер должен работать с ограничением в 4000 Гц — устанавливаем эту частоту на тонгенераторе. На усилителе, при этом, нужно установить регулятор HPF на более высокое значение (например на 8000 Гц или в крайнее положение ручки регулятора). Включаем тонгенератор и очень плавно и медленно поворачиваем ручку регулятора в обратном направлении до тех пор, пока не услышим в твитерах заданный тонсигнал. Как только громкость тонсигнала перестала прибавляться при повороте ручки — это означает, что фильтр усилителя установлен на заданной частоте в 4000 Гц.
Теперь нужно настроить мидбас.
Переключаем устройство с тонгенератором с входов 1 и 2 на входы 3 и 4.
Сначала настраиваем HPF на частоте, к примеру 65 Гц (настраивается так же как и для твитера). После того как настройка HPF закончена, переходим к настройке LPF (фильтра низких частот).
Устанавливается частота, например те же 4000 Гц, на тонгенераторе. Ручкой регулятора LPF на усилителе устанавливаем значение, ниже заданной частоты тонгенератора.
Включаем тонсигнал и медленно поворачиваем регулятор вперед.
Когда мы услышим в настраиваемом динамике сигнал тонгенератора и громкость его перестанет возрастать при повороте ручки — заданное значение фильтра установлено.
Все остальные компоненты системы настраиваются точно так же.
Частотные преобразователи. Что такое Пид-регулятор и для чего он нужен?
Работа ПИД-регулятора заключается в формировании на выходе сигнала, задающего такую выходную частоту ПЧ, чтобы поддерживался технологический параметр с заданной точностью и качеством.
ПИД-регулятор получает информацию от двух источников: задания уставки, которая определяет величину поддерживаемого технологического параметра и от обратной связи, например аналогового датчика с выходным сигналом 4-20 мА. Например, есть система накачки воздуха высокого давления с датчиком давления с выходным токовым сигналом 4-20мА и компрессором работающим от асинхронного электродвигателя.
При работе электродвигателя компрессора от преобразователя частоты с встроенным ПИД- регулятором, если давление упадет ниже заданной уставки, ПИД- регулятор задаст преобразователю частоты увеличить, на необходимую в данный момент величину, частоту вращения электродвигателя компрессора, что повысит его производительность и в свою очередь давление в управляемой системе. И наоборот, при повышении давления, ПИД- регулятор уменьшит на частотном преобразователе задание частоты вращения электродвигателя, вплоть до его полной остановки. Таким образом, при помощи преобразователя частоты с встроенным ПИД- регулятором можно добиться поддержания в системе строго заданного давления, без опасных колебаний. Встроенный в преобразователи частоты ПИД- регулятор имеет заводские настройки, тем не менее, каждая система имеет свои индивидуальные особенности, которые могут повлиять на точность работы ПИД- регулятора. В этом случае может потребоваться оптимизация работы, путем настройки параметров ПИД- регулятора.
Встроенный в преобразователи частоты ПИД- регулятор имеет заводские настройки, тем не менее, каждая система имеет свои индивидуальные особенности, которые могут повлиять на точность работы ПИД- регулятора. В этом случае может потребоваться оптимизация работы, путем настройки параметров ПИД- регулятора.
Пропорциональный коэффициент — вырабатывает выходной сигнал путем вычисления так называемой ошибки, т.е. рассогласовании между заданной уставкой и сигналом обратной связи. Если сигнал обратной связи равен заданному значению, то выходной равен нулю. При увеличении его значения реакция на управляющее воздействие ускоряется, но чрезмерное увеличение коэффициента может вызвать незатухающие колебания системы.
Время интегрирования — пропорционально интегралу по времени от отклонения регулируемой величины. Этот коэффициент не сразу вступает в работу, т.к. ему нужно накопить ошибку и его воздействие начнет увеличиваться, таким образом устранив статическую ошибку. Однако, чрезмерное увеличение времени интегрирования, так же как и с пропорциональным коэффициентом, может привезти к возникновению незатухающих колебаний системы.
Время дифференцирования — пропорционально темпу изменения отклонения регулируемой величины от уставки, которое может возникнуть в будущем. Эти отклонения могут быть спровоцированы внешними возмущениями или запаздыванием воздействия ПИД- регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальным коэффициентом.
Одним из относительно простых способов настройки ПИД-регулятора является метод настройки Циглера-Николса. Первоначально выставляем все коэффициенты в ноль. Настройка начинается с подбора пропорционального коэффициента усиления, увеличивая его (с нуля) до тех пор, пока в системе не установятся колебания с постоянной амплитудой. Фиксируем значение коэффициента и обозначаем его как Ку. Измеряем период колебаний системы Тк. По значениям Ку и Тк рассчитываются параметры регулятора
После расчёта параметров, как правило, требуется ручная подстройка для улучшения регулирования. Недостатком данного метода является необходимость выводить регулируемую системы на границу устойчивости, что для некоторых объектов не всегда возможно.
|
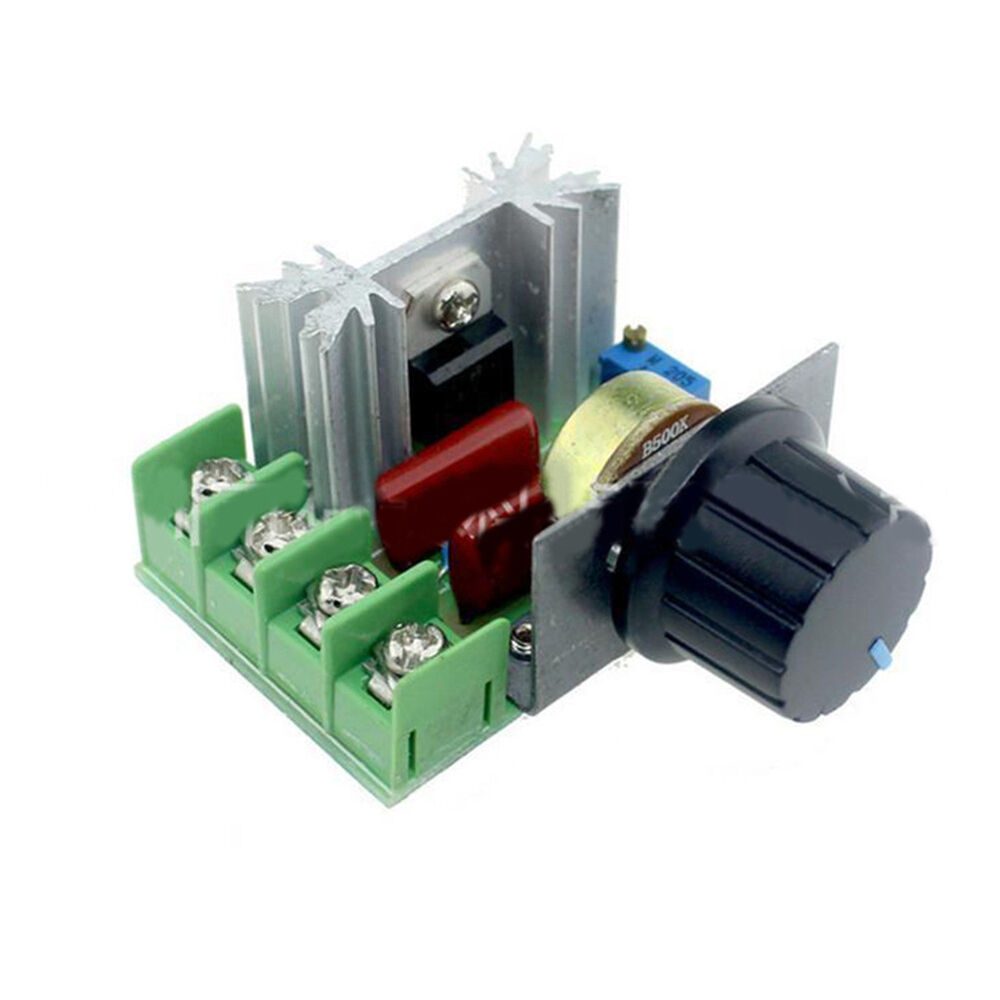
Регулятор частоты вращения двигателя Регулятор частоты вращения двигателя, стабилизирующий его скорость при изменении нагрузки, существенно повышает эксплуатационные возможности таких бытовых приборов, как электродрель, электропила, кухонный комбайн и г. д. Известен простой и эффективный однополупериодный регулятор коллекторного электродвигателя последовательного возбужде-ния, стабилизирующий скорость вращения за счет обратной связи по величине противо-ЭДС, возникающей на роторе двигателя и зависящей от его нагрузки. К сожалению, такому регулятору свойствен существенный недостаток — в нем используется высокочувствительный тиристор с током открывания менее 100 мкА. Подобрать ему замену практически невозможно. В публикуемой статье автор предлагает свой вариант схемотехнического решения регулятора, в котором сняты ограничения на параметры тиристора. Его принципиальная схема приведена на рис, 1, Это — мост, левое плечо которого образовано делителем напряжения сети R1 — R2C1 —VD1, а правое—тиристором VS1 и двигателем М1. Управляющий переход тиристора включен е диагональ моста. Открывающий тиристор сигнал представляет собой сумму складывающихся в противофаэе сигналов; напряжения сети, устанавливаемого движком резистора R2f и противо-ЭДС с ротора электродвигателя- При неизменности напряжений мост сбалансирован и частота вращения двигателя также не меняется. Увеличение нагрузки на валу двигателя снижает его обороты и уменьшает соответственно величину противо-ЭДС, что приводит к разбалансу моста, В результате сигнал, поступающий на управляющий переход тиристора, возрастает, и в следующем положительном полупериоде он открывается с меньшей задержкой, увеличивая таким образом подводимую к двигателю мощность. Однополупериодный режим двигателя приводит к снижению отдаваемой мощности. Для достижения максимальных мощности и скорости следует зашунтировать тиристор, нажав на кнопку SA1. В этом случае на двигатель будут подаваться обе полуволны сетевого напряжения. Как уже указывалось, основной недостаток рассмотренного регулятора состоит в необходимости использования высокочувствительного тиристора с током открывания менее 100 мкА, который практически нечем заменить. Введение транзисторного аналога тиристора позволяет снять ограничения на параметры открывания VS1 при сохранении тех же регулировочных характеристик. Установка стабилитрона в делитель напряжения сети понижает изменения скорости двигателя при колебаниях питающего напряжения. Схема модернизированного регулятора представлена на рис, 2. Как и рассмотренное выше устройство, регулятор работает только при положительной полуволне сетевого напряхения. Напряжение рассогласования моста через диод VD2 и резистор R10 поступает к переходу база — эмиттер транзистора VT2, Чувствительность данного устройства и качество его регулирования выше, так как напряжение открывания транзисторов существенно меньше* чем у тиристоров. Ток управления по аналогии с регулятором, представленным на рис. 1, выбран равным 0,1 мА путем шунтирования перехода транзистора резистором R7. Если напряжение, поступающее с движка резистора R2, выше напряжения на роторе двигателя, то транзистор VT2 открывается и открывает VT1, Эти приборы образуют аналог тиристора и при включении формируют мощный импульс разрядного тока конденсатора СЗ, который через токоограничивающий резистор R9 поступает на управляющий электрод симистора VS1, Симистор включается, на двигатель подается напряжение, и число его оборотов увеличивается. Накопительный конденсатор СЗ заряжается от сети через резистор R5. Стабилитрон VD4 ограничивает напряжение на конденсаторе на уровне, несколько превышающем возможное напряжение открывания симисторов или тиристоров. Кроме того, стабилитрон исключает появление обратного напряжения на транзисторах усилителя. Конденсатор С4, помимо снижения помех от искрения щеток двигателя, выполняет функцию интегрирования в цепи обратной связи. Увеличение его емкости повышает устойчивость регулятора, что бывает нужно в случае плохого контакта щеток, сопровождающегося их сильным искрением, или при установке предельно малых скоростей, когда может возникнуть так называемое «качание» оборотов. Однако следует помнить, что с увеличением емкости конденсатора С4 динамические характеристики привода ухудшаются и качество стабилизации скорости снижается. Постоянная цепи R5C3 такова, что конденсатор СЗ заряжается быстрее заряда конденсатора C4. Особенность описываемого регулятора заключается в применении симистора. Дело в том, что коммутация максимальной скорости замыканием цепи «анод-катод» предполагает наличие контактов SA1 мгновенного действия с достаточной разрывной мощностью. При ином исполнении контактов в них может возникать искрение или электрическая дуга. Послед няя крайне нежелательна, так как приводит к подгару контактов и печатной платы и, следовательно, пожароопасна. Симис-тор позволяет перенести коммутацию в цепь управляющего электрода, что полностью исключает искрение в контактах, упрощает их конструкцию и привязку к регулировочному резистору R2. При регулировании симистор работает как тиристор, а при замыкании контактов пропускает на двигатель переменный ток. Во время разработки регулятор испытывался с различными коллекторными электродвигателями: ДК77 (для бытовых электроприборов и электроинструмента), МШ-2 (для швейных машин) и даже с двигателем параллельного возбуждения СЛ261М. Управление такими существенно различными двигателями не потребовало внесения каких-либо изменений в регулятор. При использовании двигателя с параллельным возбуждением следует иметь в виду, что его статорная обмотка должна запитываться от отдельного внешнего источника и притом до подачи напряжения через регулятор на якорь. Возможности регулятора иллюстрируют нагрузочные характеристики (сплошной линией без VD1, штриховой с VD1), снятые с двигателем ДК77-280-12 при устанавливаемой на холостом ходу скорости 1500 об/мин и различном напряжении сети (рис, 3). При незначительном усложнении относительно прототипа регулятор совершенно некритичен к разбросу параметров элементов. В качестве симисторов применимы ТС, ТС2, 2ТС112иТС106 на токи 6,3-10-16 А, а также КУ208Г или 2У208Гна 5 А. Можно также использовать тиристоры КУ201Л, 2У201Л, КУ202Н-М, 2У202Н-М, КУ228И и другие при условии установки замыкателя по цепи «анод-катод». Необходимость теплоотвода определяется величиной тока нагрузки. Транзисторы должны допускать ток не ниже 250 мА и напряжение не менее 15В, Функции VT1 могут выполнять КТ350А, КТ209 (А-М), КТ501А, КТ502А (Б-Е), КT661A, КТ681А и другие, a VT2 — КT503A (Б-Е), КТ645А, КТ660А (Б), КТ684А (Б) и другие с аналогичными характеристиками. Диоды могут быть на ток не ниже 10 мА и напряжение не менее 400 В —КД105(Б-Г), КД209 (А-В), КД221 (В-Г), КД226 (В-Д), Д209,Д210,Д211,Д226,Д237(Б-В). При налаживании регулятора движок резистора R2 следует установить в нижнее по схеме положение и подстроенным резистором R3 выставить желаемую минимальную скорость вращения двигателя. Далее, изменяя положение движка резистора R2, следует проверить изменение оборотов от минимальных до максимальных, отсутствие «качания» оборотов на минимальной скорости без нагрузки, отсутствие «провала» в оборотах на максимальной скорости однополупериодного режима под нагрузкой, а также срабатывание контактов максимальной скорости. Качание устраняется увеличением емкости конденсатора С4, а провал — увеличением сопротивления резистора R1, после чего вновь уточняют положение движка резистора R3.
В. ЖГУЛЕВ
|
 Прежде чем перейти к описанию модернизированного регулятора электропривода, остановимся коротко на принципе действия простого регулирующего устройства [1].
Прежде чем перейти к описанию модернизированного регулятора электропривода, остановимся коротко на принципе действия простого регулирующего устройства [1].
 поскольку сравнение напряжений от резистора R2 и противр-ЭДС возможно только при отсутствии тока через двигатель. Конденсатор С1 в делителе напряжения сети расширяет зону регулирования в сторону малых скоростей, а конденсатор С2 в цепи управляющего электрода тиристора понижает чувствительность регулятора к искрению щеток двигателя.
поскольку сравнение напряжений от резистора R2 и противр-ЭДС возможно только при отсутствии тока через двигатель. Конденсатор С1 в делителе напряжения сети расширяет зону регулирования в сторону малых скоростей, а конденсатор С2 в цепи управляющего электрода тиристора понижает чувствительность регулятора к искрению щеток двигателя.

 Если же напряжение на резисторе R2 ниже, чем на роторе двигателя, симистор не включится, число оборотов сократится.
Если же напряжение на резисторе R2 ниже, чем на роторе двигателя, симистор не включится, число оборотов сократится.
 Это сделано для того, чтобы в любой возможный момент открывания транзистора VT2 на конденсаторе СЗ уже присутствовало рабочее напряжение, необходимое для выработки пускового импульса. Иногда такое условие может быть нарушено при резком разбалансе моста — при заторможенном двигателе (низкое сопротивление ротора) и максимальном напряжении на движке резистора R2 (большой открывающий ток с делителя). В результате транзисторы открываются до завершения зарядки конденсаторе СЗ, напряжение на нем отсутствует, импульс разрядного тока не формируется. Ток, протекающий через резистор R5, достаточен для удержания открытого состояния транзисторов, но мал для включения симистора, и поэтому двигатель не вращается. Подобную возможность можно расценить как положительную, поскольку в этом случае и при заклинивании привода двигатель отключается, Если же она нежелательна, ее устраняют некоторым снижением сопротивлений резисторов R5 — R7 и (или) повышением сопротивления резистора R1. Величина и форма напряжения на резисторе R2 практически не зависят от изменения сетевого напряжения благодаря наличию ограничителя R4 — VD1.
Это сделано для того, чтобы в любой возможный момент открывания транзистора VT2 на конденсаторе СЗ уже присутствовало рабочее напряжение, необходимое для выработки пускового импульса. Иногда такое условие может быть нарушено при резком разбалансе моста — при заторможенном двигателе (низкое сопротивление ротора) и максимальном напряжении на движке резистора R2 (большой открывающий ток с делителя). В результате транзисторы открываются до завершения зарядки конденсаторе СЗ, напряжение на нем отсутствует, импульс разрядного тока не формируется. Ток, протекающий через резистор R5, достаточен для удержания открытого состояния транзисторов, но мал для включения симистора, и поэтому двигатель не вращается. Подобную возможность можно расценить как положительную, поскольку в этом случае и при заклинивании привода двигатель отключается, Если же она нежелательна, ее устраняют некоторым снижением сопротивлений резисторов R5 — R7 и (или) повышением сопротивления резистора R1. Величина и форма напряжения на резисторе R2 практически не зависят от изменения сетевого напряжения благодаря наличию ограничителя R4 — VD1. В результате колебания питающего напряжения не приводят к нестабильности устанавливаемого фазового угла открывания симистара. Существенно снижается и нестабильность по напряжению сети устанавливаемой скорости двигателя. При неизменном фазовом угле скорость меняется только за счет изменения амплитуды напряжения на двигателе.
В результате колебания питающего напряжения не приводят к нестабильности устанавливаемого фазового угла открывания симистара. Существенно снижается и нестабильность по напряжению сети устанавливаемой скорости двигателя. При неизменном фазовом угле скорость меняется только за счет изменения амплитуды напряжения на двигателе.
 Транзисторы во время открытого состояния симистора блокируются и не функционируют.
Транзисторы во время открытого состояния симистора блокируются и не функционируют.
 В результате он открывается через период и возникает «провал-(уменьшение) скорости в верхнем положении движка резистора R2, Это явление устраняется увеличением сопротивления резистора R1.
В результате он открывается через период и возникает «провал-(уменьшение) скорости в верхнем положении движка резистора R2, Это явление устраняется увеличением сопротивления резистора R1.
 Этот двигатель мощностью 400 Вт при скорости 1200 об/мин легко тормозится положенной на его вал рукой вплоть до полной остановки в том случае, если питание на чего подавать через автотрансформатор, устанавливая на холостом ходу ту же скорость 1500 об/мин.
Этот двигатель мощностью 400 Вт при скорости 1200 об/мин легко тормозится положенной на его вал рукой вплоть до полной остановки в том случае, если питание на чего подавать через автотрансформатор, устанавливая на холостом ходу ту же скорость 1500 об/мин.
 Стабилитрон VD1 подойдет на напряжение стабилизации 120…180 В (КС630А, КС650А, KC680A, 2C920A, 2C950A, 2С980А) и может быть заменен цепочкой последовательно включенных маломощных стабилитронов на суммарное напряжение 150 В. Стабилитрон VD4 — любой маломощ-ный с напряжением стабилизации 9…11 В, кроме термокомпенсированных. Конденсаторы С1—С4 — керамические КМ, КМ-6, К10-17 или пленочные К73-17. Конденсаторы С5, С6 — К73-17 с номинальным напряжением 630 В (конденсаторы иных типов и К73-17 на меньшее номинальное напряжение использовать нельзя).
Стабилитрон VD1 подойдет на напряжение стабилизации 120…180 В (КС630А, КС650А, KC680A, 2C920A, 2C950A, 2С980А) и может быть заменен цепочкой последовательно включенных маломощных стабилитронов на суммарное напряжение 150 В. Стабилитрон VD4 — любой маломощ-ный с напряжением стабилизации 9…11 В, кроме термокомпенсированных. Конденсаторы С1—С4 — керамические КМ, КМ-6, К10-17 или пленочные К73-17. Конденсаторы С5, С6 — К73-17 с номинальным напряжением 630 В (конденсаторы иных типов и К73-17 на меньшее номинальное напряжение использовать нельзя).
 Между резистором R2 и подвижным контактом находится переходная пластмассовая втулка с кулачком, обеспечивающим замыкание подвижного контакта со стойкой в верхнем по схеме положении переменного резистора R2.
Между резистором R2 и подвижным контактом находится переходная пластмассовая втулка с кулачком, обеспечивающим замыкание подвижного контакта со стойкой в верхнем по схеме положении переменного резистора R2.
 По этой причине качество регулирования напрямую зависит от указанных характеристик применяемого двигателя. Однако предельная простота устройства управления и хорошие нагрузочные характеристики вполне компенсируют этот недостаток.
По этой причине качество регулирования напрямую зависит от указанных характеристик применяемого двигателя. Однако предельная простота устройства управления и хорошие нагрузочные характеристики вполне компенсируют этот недостаток.
ПИД-регулятор в преобразователях частоты ABB серии ACS355
11.07.2017
Тематика: Полезная информация
Введение
Преобразователи частоты ABB серии ACS355 оснащены встроенным ПИД-регулятором («ПИД-регулятор» расшифровывается как «пропорционально-интегрально-дифференциальный регулятор»).
Основные примеры применения ПИД-регулятора в преобразователе частоты — это процессы поддержания заданного давления в водяной магистрали, температуры воздуха в конденсаторе охлаждения, давления воздуха компрессора и пр.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Что такое ПИД-регулятор в преобразователе частоты?
ПИД-регулятор является одним из основных узлов замкнутой системы регулирования: давления, расхода, уровня, скорости, положения, температуры и т. д., и используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимой точности и должного качества переходного процесса регулирования.
д., и используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимой точности и должного качества переходного процесса регулирования.
Рис.1. Условная схема ПИД-регулятора в преобразователе частоты ACS355 ABB.
ПИД-регулятор преобразователя частоты условно имеет два входа (см. рис. 1).
На первый вход подается сигнал задания величины параметра технологического процесса, например, необходимая величина давления или температуры. Этот сигнал задания часто называют «уставкой».
На второй вход ПИД-регулятора преобразователя частоты поступает сигнал обратной связи (например, сигнал 4..20mA от пропорционального датчика давления).
В зависимости от величины и знака рассогласования между этими сигналами на выходе ПИД-регулятора, формируется сигнал, который изменяет выходную частоту преобразователя таким образом, чтобы заданное значение технологического параметра (например, давление в трубопроводе) поддерживалось с заданной точностью и с заданным качеством.
Объяснение принципа работы ПИД-регулятора простым языком выглядит следующим образом. Например, необходимо регулировать давление в водопроводе при помощи насоса с преобразователем частоты и пропорционального датчика обратной связи по давлению.
Если давление в водопроводе будет меньшим, чем уставка, то ПИД-регулятор сформирует выходной сигнал для увеличения выходной частоты преобразователя. Это приведёт к увеличению производительности (расхода) насоса и давление в водопроводе начнет увеличиваться.
Если давление в водопроводе будет больше величины, установленной заданием (уставки), то ПИД-регулятор сформирует управляющий сигнал на уменьшение выходной частоты преобразователя и давление в трубопроводе уменьшится.
Принципы ПИД-регулирования в преобразователях частоты
Выходной сигнал ПИД-регулятора преобразователя частоты представляет собой управляющий сигнал, являющийся суммой трёх слагаемых (составляющих):
- Пропорциональная составляющая (П) — пропорциональна разности входного сигнала и сигнала обратной связи (сигнал рассогласования).
- Интегральная составляющая (И) — интеграл сигнала рассогласования.
- Дифференциальная составляющая (Д) — производная сигнала рассогласования.

Пропорциональная составляющая (П) – это рассогласование между величиной уставки и сигналом обратной связи. При использовании только пропорциональной составляющей всегда будет иметь место статическая ошибка. Например, в замкнутой системе поддержания давления в системе водоснабжения реальное давление будет меньше заданного. Для того, чтобы уменьшить статическую ошибку необходимо увеличить коэффициент усиления П-регулятора (пропорциональной составляющей).
Чрезмерное увеличение коэффициента усиления пропорциональной составляющей ПИД-регулятора преобразователя частоты приводит к автоколебаниям и к неустойчивой работе замкнутой системы регулирования. Поэтому, на практике поступают так: увеличивают коэффициент усиления пропорциональной составляющей (П) до появления автоколебаний, и после этого, уменьшают этот коэффициент на 20 – 30%.
Для устранения статической ошибки изменяют интегральную (И) составляющую ПИД-регулятора. Таким образом, изменяя время интегрирования, получают требуемую точность и качество регулирования.
Дифференциальная составляющая (Д) используется редко – обычно, только в высоко динамичных системах регулирования скорости, положения, синхронизации и т.д.
В целом, для настройки ПИД-регулятора не требуется отличного понимания формальной теории управления системами. При этом использование ПИД-регулятора позволяет решить около 90% всех задач управления простыми системами замкнутого цикла.
Применение преобразователей частоты ACS355 с ПИД-регулятором в водоснабжении
На рис.2 и рис.3 приведены условные блок-схемы систем регулирования давления воды в водоснабжении с использованием преобразователей частоты ABB серии ACS355.
Рис.2. Условная блок-схема системы регулирования давления воды в водоснабжении.
Рис.3. Пример применения ПИД-регулятора на базе ПЧ ACS355 в водоснабжении.
(ПИД-регулятор контролирует скорость вращения насоса подкачки, в зависимости от измеренного и заданного давления.)
Преобразователи частоты ABB серии ACS355
Преобразователи частоты ABB серии ACS355 – оптимальный выбор по соотношению «цена-качество» для решения задач с ПИД-регулированием. Общий вид приводов ACS355 показан на рис.4.
Частотные приводы ACS355 обладают широким набором параметров и возможностей. Настроить необходимый режим работы возможно как с панели управления преобразователем, так и при помощи персонального компьютера, посредством специализированного программного обеспечения DriveWindow Light.
Рис.4. Преобразователи частоты ABB серии ACS355 с базовой панелью управления.
В данной статье, для примера, рассмотрен вариант настройки ПИД-регулятора преобразователя ACS355 при помощи панели управления.
Панель управления к частотному приводу ACS355 предлагается в двух вариантах исполнения: базовая панель и интеллектуальная панель управления (см. рис.5).
Рис.5. Варианты панелей управления к преобразователям частоты ABB серии ACS355.
Интеллектуальная панель управления частотным приводом ACS355 имеет встроенный мастер запуска (настройки) и интерактивную справку. С помощью этих инструментов настройку преобразователя частоты ACS355 на режим ПИД-регулирования можно выполнить без особых временных затрат и не пользуясь руководством по эксплуатации.
При использовании базовой панели управления встроенных удобных инструментов, указанных выше, нет.
Настройка ПИД-регулятора в преобразователе ACS355
Для простоты настройки режима ПИД-регулирования в преобразователе частоты ACS355 (с базовой или интеллектуальной панелью управления) ниже изложен минимально необходимый перечень параметров, на которые необходимо обратить внимание (см. таблицу 1).
таблицу 1).
Таблица 1: Список параметров для настройки режима ПИД-регулирования в преобразователе частоты ACS355
| Номер и название параметра | Описание функции параметра | Значение параметра | Описание выбранного значения параметра |
| Выбор макроса ПИД-регулятор | |||
| 9902 ПРИКЛ. МАКРОС | Выбирает прикладной макрос | 6 (ПИД-РЕГУЛЯТ) | ПИД-регулирование. Для приложений, в которых привод регулирует параметр технологического процесса. |
| Переходим на внешний 2 (ЦВ1 – автоматический режим) | |||
1002 КОМАНДЫ ВНЕШН. 2 2 | Определяет способ подключения и источник команд пуска, останова и направления вращения для внешнего устройства управления 2 (ВНЕШНИЙ2) | 1 (ЦВХ1) | Команды пуска и останова подаются через цифровой вход 1 (0 = останов, 1= пуск). Направление вращения фиксируется в соответствии с параметром 1003 НАПРАВЛЕНИЕ (установка ВПЕРЕД, НАЗАД= ВПЕРЕД) |
| Управление по каналу Внешний 2 (там есть ПИД) | |||
| 1102 ВЫБОР ВНЕШН. 1/2 | Определяет источник, с которого привод считывает сигнал, выбирается одно из двух внешних устройств управления (ВНЕШНИЙ1 или ВНЕШНИЙ2). | 7 (ВНЕШНИЙ2) | Активно внешнее устройство управления 2. Источники управляющих сигналов определяются параметрами 1002 КОМАНДЫ ВНЕШН. 2 и 1106 ИСТОЧН. ЗАДАНИЯ 2. |
| Выход ПИД1 подключаем в работу | |||
| 1106 ИСТОЧН. ЗАДАНИЯ2 | Выбор источника сигнала для внешнего задания 2 (ЗАДАНИЕ2) | 19 (ВЫХ. ПИД1) ПИД1) | Выход регулятора ПИД1 См. группы параметров 40 ПИД РЕГУЛЯТОР1 и 41 ПИД РЕГУЛЯТОР2 |
| Выбор направления вращения | |||
| 1003 НАПРАВЛЕНИЕ | Разрешает управление направлением вращения двигателя или фиксирует направление | 1 (ВПЕРЕД) | Направление вращения – только вперед |
| Разрешение на запуск привода | |||
| 1601 РАЗРЕШЕНИЕ РАБОТЫ | Выбирает источник внешнего сигнала разрешения работы. | 0 (НЕ ВЫБРАН) | Позволяет запуск привода без внешнего сигнала разрешения работы. |
| Запуск без намагничивания постоянным током | |||
| 2101 РЕЖИМ ПУСКА | Выбор способа пуска двигателя | 1 (АВТОМАТ) | Привод запускает двигатель сразу же с нулевой частоты, если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение СКАЛЯР: ЧАСТ. Если требуется пуск на ходу, выберите ПУСК СКАН. Если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение ВЕКТОР: СКОРОСТЬ или ВЕКТОР: МОМЕНТ, перед пуском привод предварительно намагничивает двигатель постоянным током. Время предварительного намагничивания определяется значением параметра 2103 ВРЕМЯ ПОДМАГНИЧ. См. значение НАМАГН.ПТ. Если требуется пуск на ходу, выберите ПУСК СКАН. Если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение ВЕКТОР: СКОРОСТЬ или ВЕКТОР: МОМЕНТ, перед пуском привод предварительно намагничивает двигатель постоянным током. Время предварительного намагничивания определяется значением параметра 2103 ВРЕМЯ ПОДМАГНИЧ. См. значение НАМАГН.ПТ. |
| Выбор режима останова | |||
| 2102 РЕЖИМ ОСТАНОВА | Выбор режима останова двигателя | 1 (ВЫБЕГ) | Останов двигателя путем отключения питания. Двигатель вращается по инерции до остановки. |
| Выбираем единицы измерения и формат отображения | |||
| 4006 ЕДИНИЦЫ ИЗМЕР | Выбирает единицу измерения для текущих значений (регулируемой величины) ПИД-регулятора. | 4 (%) | процент |
| 22 (бар) | бар | ||
40(куб. м/мин) м/мин) | кубометр в минуту | ||
| 4007 ПОЛОЖ.ДЕС. ТОЧКИ | Определяет положение десятичной точки для регулируемых ПИД регулятором величин. | 1 | |
| 4008 ЗНАЧЕНИЕ 0% | Вместе с параметром 4009 ЗНАЧЕНИЕ 100 % определяет масштабирование регулируемых ПИД регулятором величин. | ||
| 4009 ЗНАЧЕНИЕ 100% | Вместе с параметром 4008 ЗНАЧЕНИЕ 0% определяет масштабирование регулируемых ПИД-регулятором величин. | ||
| Выбор сигнала уставки | |||
| 4010 ВЫБОР УСТАВКИ | Определяет источник сигнала задания для ПИД-регулятора технологического процесса. | 0 (ПАНЕЛЬ УПРАВ) | Панель управления |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. УСТАВКА. | ||
| 4011 ВНУТР. УСТАВКА | Выбирает фиксированное значение в качестве задания ПИД-регулятора процесса, когда параметр 4010 ВЫБОР УСТАВКИ установлен на ВНУТРЕННИЙ. | 40 | Значение этого пункта необходимо изменять в случае, когда параметр 4011 равен 19 и устанавливать необходимое для технологического процесса значение. |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 1107 МИН. ЗАДАНИЯ2 | Определяет минимальную величину внешнего задания 2 (ЗАДАНИЕ2). Соответствует минимальной установке для используемого источника сигнала. | 0,00% | |
1108 МАКС. ЗАДАНИЯ2 ЗАДАНИЯ2 | Определяет максимальную величину внешнего задания2 (ЗАДАНИЕ2). Соответствует максимальной установке для используемого источника сигнала. | 100,00% | |
| Выбор сигнала ОС | |||
| 4016 ВХОД СИГН.1 | Определяет источник действительной величины 1 (СИГН.1). См. также параметр 4018 СИГН.1 МИН | 2 (АВХ2) | Используется аналоговый вход АВХ2 для СИГН.1 |
| Инвертирование сигнала ОС | |||
| 4005 ИНВЕРТ. ОШИБКИ | Выбирается зависимость между сигналом обратной связи и скоростью привода. | 0 (НЕТ) | Прямая зависимость: уменьшение сигнала обратной связи приводит к увеличению скорости привода. Ошибка= Задание- Обратная связь |
| Настройки ПИД-регулятора | |||
| 4001 КОЭФ. УСИЛЕНИЯ | Определяет коэффициент усиления ПИД-регулятора технологического процесса. | 1 | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4002 ВРЕМЯ ИНТЕГРИР | Определяет время интегрирования ПИД-регулятора1 технологического процесса. | 10,0с | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4003 ВРЕМЯ ДИФФЕРЕНЦ | Определяет время дифференцирования ПИД-регулятора технологического процесса. | 0 | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| Параметры управления | |||
| 2202 ВРЕМЯ УСКОР. 1 | Определяет время ускорения1 | 5,0 с | |
| 2203 ВРЕМЯ ЗАМЕДЛ. 1 | Определяет время замедления1 | 5,0 с | |
Данный базовый набор параметров позволяет запустить преобразователь частоты ABB серии ACS355 в режиме ПИД-регулирования в общем случае. Изучив руководство по эксплуатации, пользователь может выполнить более тонкую настройку, оптимально подходящую для конкретного применения.
Изучив руководство по эксплуатации, пользователь может выполнить более тонкую настройку, оптимально подходящую для конкретного применения.
Руководство по эксплуатации на русском языке в печатном виде поставляется вместе с преобразователем частоты ACS355 в одной коробке. Также руководство на русском языке можно скачать в электронном варианте здесь.
Блок-схема настройки ПИД-регулятора ПЧ ACS355
Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) преобразователя частоты ABB серии ACS355 показана на рис.6.
Рис.6. Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) в преобразователях частоты ABB серии ACS355.
На блок-схеме указаны номера параметров и номера групп параметров из руководства по эксплуатации преобразователя частоты.
Выводы
Преобразователи частоты ABB серии ACS355 имеют удобную настройку ПИД-регулятора (мастер запуска) и интерактивную русскоязычную справку. Это позволяет адаптировать преобразователь под широкий спектр задач и быстро ввести привод в эксплуатацию. Возможность настройки преобразователя частоты, как через панель управления, так и при помощи компьютера, добавляет гибкости и удобства в использовании ПЧ ACS355.
Это позволяет адаптировать преобразователь под широкий спектр задач и быстро ввести привод в эксплуатацию. Возможность настройки преобразователя частоты, как через панель управления, так и при помощи компьютера, добавляет гибкости и удобства в использовании ПЧ ACS355.
9.1.2 Регулирование частоты | EBF 483: Введение в рынки электроэнергии
9.1.2 Регулирование частоты
До сих пор в этом уроке мы упоминали частоту системы несколько раз. Критически важно поддерживать частоту всей системы на уровне, близком к 60 Гц. Каждый генератор в большой энергосистеме должен вращаться с одинаковой скоростью, иначе сама система может стать нестабильной. В качестве аналогии представьте себе машину, едущую по прямой.Все колеса должны вращаться с одинаковой скоростью. Что произойдет, если одно колесо внезапно начнет вращаться быстрее других? Что ж, если это одно колесо начинает вращаться немного быстрее, тогда остальная часть машины может приложить силу к этому одному колесу, чтобы заставить его замедлиться. Машина продолжала ехать прямо. Если это одно колесо начнет вращаться намного быстрее, автомобиль может выйти из-под контроля.
Машина продолжала ехать прямо. Если это одно колесо начнет вращаться намного быстрее, автомобиль может выйти из-под контроля.
Та же логика применима и к электросетям. Если частота системы немного отклоняется от 60 Гц, то вращающиеся генераторы, естественно, будут оказывать большее усилие друг на друга, чтобы вернуть эту частоту к 60 Гц.Если отклонение действительно велико, то сетка сама по себе станет нестабильной. Регулирование частоты (или просто «регулирование» для краткости) — это инструмент, используемый операторами электросетей в тех случаях, когда частота системы становится слишком высокой или слишком низкой.
Чтобы понять, как частота может стать слишком высокой или слишком низкой, мы воспользуемся еще одной аналогией, которая показана на рисунках ниже. Думайте о электросети как о ванне со смесителем и сливом. Уровень воды в ванне подобен частоте электросети.Если кран намного больше сливного, то уровень воды в ванне поднимется. Точно так же в энергосистеме, если предложение внезапно становится намного больше, чем спрос, тогда частота поднимается выше 60 Гц. Это может произойти, если произойдет внезапный всплеск предложения (например, если ветер внезапно усиливается, быстро увеличивая мощность ветра) или если есть внезапное падение спроса (например, все в США выключают свои телевизоры в конец Суперкубка).
Это может произойти, если произойдет внезапный всплеск предложения (например, если ветер внезапно усиливается, быстро увеличивая мощность ветра) или если есть внезапное падение спроса (например, все в США выключают свои телевизоры в конец Суперкубка).
Рисунок 9.2: Частота энергосистемы подобна воде, текущей в ванну и вытекающей из нее. Чтобы уровень воды оставался постоянным, приток должен в точности равняться оттоку.
Щелкните здесь, чтобы просмотреть подробное описание рисунка
Имеются три диаграммы в форме стаканов с входными (генерирующими) и выходными (нагрузочными) портами:
На первой диаграмме входящий поток равен выходному потоку, а частота стабильна на уровне 60 Гц.
На второй диаграмме приток больше оттока, а частота возрастает примерно на 60 Гц.
третья диаграмма, приток меньше оттока и частота падает ниже 60 Гц.
Источник: Джо Это, Национальная лаборатория Лоуренса Беркли
Рисунок 9. 3: Отклонения от частоты 60 Гц могут привести к корректирующим действиям, которые могут поставить под угрозу надежность электросети.
3: Отклонения от частоты 60 Гц могут привести к корректирующим действиям, которые могут поставить под угрозу надежность электросети.
Источник: Джо Это, Национальная лаборатория Лоуренса Беркли
Если слив больше крана, то происходит обратное — уровень воды в ванне упадет.В электросети, если спрос начинает превышать предложение, системная частота упадет ниже 60 Гц. Чаще всего это происходит при резком падении электроснабжения, например, когда большой генератор внезапно отключается от сети.
Как правило, операторам сети легче обрабатывать события с превышением частоты, чем с событиями с пониженной частотой. Если частота начинает превышать 60 Гц, это обычно происходит медленно, и операторы сети могут отреагировать, уменьшив выходную мощность некоторых генераторов. Однако события с пониженной частотой могут быть более серьезными, потому что они часто бывают неожиданными и включают потерю большого источника электричества.Когда это происходит, восстановление частоты системы до 60 Гц включает три фазы, которые вместе известны как «управление частотой». Эти три фазы проиллюстрированы на рисунке ниже и могут быть резюмированы следующим образом:
Эти три фазы проиллюстрированы на рисунке ниже и могут быть резюмированы следующим образом:
- Контроль первичной частоты запускается автоматически, без вмешательства человека, сразу после события понижения частоты. Генераторы, оснащенные датчиками частоты, автоматически регулируют свою мощность.
- Вторичная регулировка частоты срабатывает в течение десятков секунд, также автоматически, если событие пониженной частоты не устраняется само.Вторичное регулирование частоты иногда называют автоматическим управлением генерацией (АРУ).
- Третичное регулирование частоты срабатывает в течение нескольких минут, если событие пониженной частоты не устраняется посредством первичных или вторичных механизмов контроля частоты. Третичное регулирование частоты обычно предполагает, что оператор энергосистемы вручную регулирует диспетчеризацию некоторых электростанций.
Рисунок 9.4: Внезапное падение частоты системы вызывает автоматический отклик для корректировки частоты, за которым следует ручное вмешательство операторов энергосистемы. Вспомогательные службы предоставляют эти ответы.
Вспомогательные службы предоставляют эти ответы.
Щелкните здесь, чтобы просмотреть подробное описание рисунка
На схеме показаны две картинки:
Первый — это график, показывающий внезапное падение частоты на графике. Частота отложена по оси ординат, а время — по оси абсцисс. На графике частота падает до 59,90 Гц между 0 и 8 секундами. Это называется периодом ареста. Между 8 и 21 секундой происходит период отскока, когда система поднимается примерно до 59.94 Гц на графике. Через 21 секунду система перейдет в период восстановления. Системная частота начинает постепенно увеличиваться с 59,94 Гц через 30 секунд, но после начального падения требуется около десяти минут, чтобы вернуться к начальной частоте 60 Гц.
Второй — это график мощности по оси y и времени по оси x, показывающий, какие элементы управления используются при падении мощности. Первичная регулировка частоты происходит сразу через 10 минут и использует мощность по колоколообразной кривой.
Первичное регулирование частоты — это характеристика регулятора и частотно-зависимая характеристика спроса. Затем срабатывает вторичный регулятор частоты. Он запускается примерно через 10 секунд, но не начинает потреблять много энергии примерно через 30 секунд. Затем она увеличивается примерно до 10 минут, после чего начинает снижаться. Secondary Frequency Control — это генераторы на автоматическом управлении генерацией. Последним элементом управления является третичный регулятор частоты, мощность которого постепенно увеличивается через десять минут и выравнивается при произвольной мощности около 25 минут.Третичное регулирование частоты осуществляется генераторами по диспетчерской.
 Первичное регулирование частоты — это характеристика регулятора и частотно-зависимая характеристика спроса. Затем срабатывает вторичный регулятор частоты. Он запускается примерно через 10 секунд, но не начинает потреблять много энергии примерно через 30 секунд. Затем она увеличивается примерно до 10 минут, после чего начинает снижаться. Secondary Frequency Control — это генераторы на автоматическом управлении генерацией. Последним элементом управления является третичный регулятор частоты, мощность которого постепенно увеличивается через десять минут и выравнивается при произвольной мощности около 25 минут.Третичное регулирование частоты осуществляется генераторами по диспетчерской.
Первичное регулирование частоты — это характеристика регулятора и частотно-зависимая характеристика спроса. Затем срабатывает вторичный регулятор частоты. Он запускается примерно через 10 секунд, но не начинает потреблять много энергии примерно через 30 секунд. Затем она увеличивается примерно до 10 минут, после чего начинает снижаться. Secondary Frequency Control — это генераторы на автоматическом управлении генерацией. Последним элементом управления является третичный регулятор частоты, мощность которого постепенно увеличивается через десять минут и выравнивается при произвольной мощности около 25 минут.Третичное регулирование частоты осуществляется генераторами по диспетчерской.Источник: Джо Это, Национальная лаборатория Лоуренса Беркли
Услуга, которую мы называем «регулирование частоты», обычно запускается через несколько минут после события отклонения частоты, после того, как сработало вторичное регулирование частоты. В областях, где была проведена реструктуризация коммунального сектора и созданы конкурентные рынки, регулирование частоты обычно обеспечивается системой. операторов посредством аукциона, аналогичного аукциону на сутки вперед и рынку энергии в реальном времени.Оператор рынка (например, PJM) объявляет, какая мощность регулирования частоты необходима, а производители представляют предложения, чтобы иметь возможность обеспечить такое регулирование частоты. Это устанавливает отдельную цену за регулирование частоты.
операторов посредством аукциона, аналогичного аукциону на сутки вперед и рынку энергии в реальном времени.Оператор рынка (например, PJM) объявляет, какая мощность регулирования частоты необходима, а производители представляют предложения, чтобы иметь возможность обеспечить такое регулирование частоты. Это устанавливает отдельную цену за регулирование частоты.
На большинстве рынков электроэнергии предложение регулирования частоты оператору сети означает, что производитель готов увеличить или уменьшить мощность (известное как «регулирование вверх» и «регулирование вниз») на определенную величину. (Рынок ERCOT в Техасе работает немного иначе, где есть отдельные рынки для регулирования вверх и регулирования вниз.) Это означает, что генератор, в то же время, убирает мощность с рынка энергии на сутки вперед / в реальном времени и обязуется производить некоторое количество энергии. Например, предположим, что генератор мощностью 100 МВт предлагал регулирующему рынку 5 МВт мощности. Это означает, что генератор готов снизить мощность на 5 МВт при необходимости и увеличить мощность на 5 МВт при необходимости. Таким образом, генератор не может предложить более 95 МВт своей мощности на рынке энергии на сутки вперед / в реальном времени и должен будет убедиться, что не менее 5 МВт было разрешено на рынке энергии на сутки вперед / в реальном времени.
Таким образом, генератор не может предложить более 95 МВт своей мощности на рынке энергии на сутки вперед / в реальном времени и должен будет убедиться, что не менее 5 МВт было разрешено на рынке энергии на сутки вперед / в реальном времени.
Плата за регулирование состоит из двух компонентов. Во-первых, производителям платят за мощность, которую они выделяют для регулирования. Это иногда называют ценой «мощности» и принимают единицы в долларах за МВт мощности. Во-вторых, когда генератор вызывается для увеличения или уменьшения выходной мощности в ответ на событие отклонения частоты, он оплачивается за энергию, которая производится или не производится. Это иногда называют платой за «производительность» и часто устанавливают равной цене энергии в реальном времени (так что принимаются единицы в долларах за МВтч).
Для примера возьмем тот же генератор, обеспечивающий 5 МВт регулирования. Цена возможности регулирования составляет 5 долларов за МВт. Генератор направлен на производство 50 МВтч энергии на рынке в реальном времени по цене 10 долларов за МВтч. Из-за отклонения частоты генератор просят произвести дополнительные 2 МВт мощности в течение 10 минут. Общий доход генератора за этот час составит:
Из-за отклонения частоты генератор просят произвести дополнительные 2 МВт мощности в течение 10 минут. Общий доход генератора за этот час составит:
- Выручка на рынке энергии: 50 МВтч * 10 долларов США / МВтч = 500 долларов США
- Регулируемая мощность: 5 МВт * 5 долларов США / МВт = 25 долларов США
- Характеристики регулирования: 2 МВт * (1/6 часа) * 10 долларов США / МВтч = 3 доллара США.33
- Общая выручка: 528,33 долл. США
Динамический регулятор частоты — Power Systems & Controls
СЕРИИ DFR
DFR Power Systems & Controls серии — это динамический регулятор частоты , разработанный для сред с отклонениями частоты. Оборудование, построенное сегодня, не будет полностью работать должным образом. Исходя из нашего опыта, DFR основан на роторном ИБП серии MC. Однако DFR не будет иметь функции байпаса или батареи.Следовательно, динамический регулятор частоты включает в себя все остальные компоненты ИБП в первичном тракте питания. В результате это позволяет легко идентифицировать частотные аномалии. Если обнаружена аномалия, он автоматически исправляет эти отклонения, обеспечивая постоянное, надежное и чистое питание для последующего оборудования.
Заявки:
- Условия нестабильного питания
- Международные рынки
- Среда промышленной частоты
- Опытные критически важные пользователи
- Проблемы с качеством электроэнергии
- Поля солнечной энергии
- USG & D.О.Д. Приложения
Преимущества:
- Гибридная роторная технология
- Прецизионное регулирование напряжения
- Контроль и мониторинг неисправностей
- Цветной сенсорный дисплей
- Интегрированная бесшумная конструкция
- Вертикальная и горизонтальная конфигурации
- Возможность нескольких выходов
Серия DFR будет обеспечивать такую же бескомпромиссную надежность, что и все оборудование Power Systems & Controls, поскольку оно основано на нашей гибридной роторной технологии. Доступен частотный регулятор от 25 до 500 кВА. Наша приверженность качеству электроэнергии способствовала разработке этого продукта промышленного класса, который будет корректировать частоту и напряжение одновременно. Эта надежность в сочетании с долгим сроком службы дает SERIES DFR явное преимущество перед всеми другими регуляторами, представленными сегодня на рынке.
Доступен частотный регулятор от 25 до 500 кВА. Наша приверженность качеству электроэнергии способствовала разработке этого продукта промышленного класса, который будет корректировать частоту и напряжение одновременно. Эта надежность в сочетании с долгим сроком службы дает SERIES DFR явное преимущество перед всеми другими регуляторами, представленными сегодня на рынке.
Динамическое регулирование частоты идеально подходит для международных рынков или ситуаций, когда отклонения частоты остаются постоянной проблемой. Кроме того, благодаря поворотной конструкции DFR серии также отличается упрощенным обслуживанием и более простой топологией.Таким образом, динамический регулятор частоты можно настроить так, чтобы он лучше соответствовал потребностям вашего проекта. PS&C предлагает множество опций, включая цветной сенсорный дисплей и удаленную связь, а также специальные корпуса NEMA и ISO.
Hybrid Мощный регулятор частоты для разнообразного применения
Получите доступ к множеству разновидностей мощного, надежного и эффективного регулятора частоты на Alibaba. com для всех типов жилых и коммерческих помещений. Эти частотные регуляторы оснащены новейшими технологиями и обладают различной мощностью, чтобы легко служить вашим целям.Вы можете выбрать из существующих моделей регуляторов частоты на сайте или перейти на полностью адаптированные версии этих продуктов. Они долговечны и устойчивы, чтобы постоянно предлагать стабильное обслуживание без каких-либо поломок.
com для всех типов жилых и коммерческих помещений. Эти частотные регуляторы оснащены новейшими технологиями и обладают различной мощностью, чтобы легко служить вашим целям.Вы можете выбрать из существующих моделей регуляторов частоты на сайте или перейти на полностью адаптированные версии этих продуктов. Они долговечны и устойчивы, чтобы постоянно предлагать стабильное обслуживание без каких-либо поломок.
Регулятор частоты Коллекции , найденные на сайте, оснащены всеми интересными функциями, такими как интеллектуальная технология охлаждения для более быстрого и интеллектуального охлаждения, защита от короткого замыкания, интеллектуальная сигнализация для обнаружения и дисплеи для отображения любых ошибок, перенапряжения защита и тд.Эти регуляторы частоты доступны с различными значениями напряжения, такими как 230 В переменного тока, 220 В / 230 В / 240 В для преобразователей и 100 В / 110 В / 120 В / 220 В / 230 В / 240 В для линейки инверторов. Эти преобразователи частоты также оснащены функциями защиты от обратной полярности на входе.
Эти преобразователи частоты также оснащены функциями защиты от обратной полярности на входе.
Alibaba.com может помочь вам выбрать из различных регуляторов частоты с различными моделями, размерами, емкостями, потребляемой мощностью и многим другим. Эти интеллектуальные регуляторы частоты эффективны в экономии счетов за электроэнергию даже в самых экстремальных климатических условиях.У них также есть возможность быстрой зарядки. Вы можете использовать этот частотный регулятор в своих домах, гостиницах, офисах или любой другой коммерческой недвижимости, где энергопотребление является дорогостоящим и важным.
Просмотрите различные диапазоны регуляторов частоты на Alibaba.com и купите лучшие из этих продуктов. Все эти продукты имеют сертификаты CE, ISO, RoHS и имеют гарантийный срок. OEM-заказы доступны для оптовых закупок с индивидуальными вариантами упаковки.
Регулирование частоты — Ассоциация накопителей энергии
24 октября 2013 г.
Регулирование частоты
Краткое содержание
Для того, чтобы синхронизировать генерирующие активы для работы электрической сети, частота переменного тока (AC) должна поддерживаться в жестких пределах допуска.Различные методы, доступные для «частотного регулирования», включают инерцию генератора, добавление и вычитание генерирующих активов, специализированное реагирование на спрос и хранение электроэнергии. У каждого из этих методов есть свои плюсы и минусы, а реализация этих методов занимает от миллисекунды до 20 минут. В группе «вспомогательных услуг», предоставляемых при управлении сетью на открытом рынке, регулирование частоты имеет наибольшее значение. Регулирование частоты в основном обеспечивается за счет наращивания (увеличения и / или уменьшения) генерирующих активов.Обычно это занимает минуты, а не секунды. Хранилище электроэнергии способно выполнять работу за миллисекунды, и Тихоокеанская северо-западная национальная лаборатория (PNNL) предложила, чтобы стоимость миллисекундных хранилищ электроэнергии была как минимум вдвое больше, чем у 20-минутных активов.
Обсуждение
Доступны многочисленные отчеты по регулированию частоты. Ранние отчеты поступают из национальных лабораторий Министерства энергетики США (DOE). Национальная лаборатория Ок-Ридж (ORNL) впервые предложила заняться этим в начале 2000-х годов.С тех пор Министерство энергетики спонсировало исследования и отчеты, в том числе из PNNL, Sandia National Laboratories (SNL), Национальной лаборатории Айдахо (INL) и Национальной лаборатории Лоуренса Беркли (LBL).
Ниже приведены две диаграммы из отчета: Использование показателей частотной характеристики для оценки требований к планированию и эксплуатации для надежной интеграции переменного возобновляемого поколения Джозеф Х. Это, главный исследователь Национальной лаборатории Лоуренса Беркли, 2010 г.
По своей природе частотное регулирование — это приложение для аккумулирования электроэнергии.Это было определено как одно из лучших «значений» для повышения стабильности сети и не считается «энергетическим арбитражем», например, хранение энергии ветра в ночное время для использования днем. Обычно это стоит от 10 до 60 долларов за мегаватт-час.
Обычно это стоит от 10 до 60 долларов за мегаватт-час.
Вернуться к блогу ESA
Как выбрать частоту импульсного регулятора
В этой статье обсуждаются некоторые детали — эффективность, шум и т. Д. — которые влияют на выбор рабочих частот для импульсных источников питания.
Импульсные регуляторы, как следует из названия, выполняют преобразование постоянного / постоянного тока, включая и выключая что-либо. В типичной схеме на основе индуктора переключатели управляют током, протекающим через индуктор; В регуляторах на основе подкачки заряда заряд от входного источника питания «перекачивается» через переключатели на конденсатор. Переключение — дело периодическое, и, следовательно, регулирование режима переключения никогда не выходит за рамки вопроса частоты.
Я уверен, что вы заметили, что микросхемы импульсных стабилизаторов бывают самых разных частот.Я бы сказал, что типичный диапазон составляет от 100 кГц до 2 МГц, хотя вы можете найти частоты ниже 100 кГц, а есть части, которые значительно выше (до 3 или 4 МГц). Вы также могли заметить, что многие импульсные ИС позволяют выбирать рабочую частоту (в указанном диапазоне) через внешний резистор. Почему детали предлагают такой широкий диапазон частот? И какова правильная частота для данного приложения? Давайте взглянем.
Вы также могли заметить, что многие импульсные ИС позволяют выбирать рабочую частоту (в указанном диапазоне) через внешний резистор. Почему детали предлагают такой широкий диапазон частот? И какова правильная частота для данного приложения? Давайте взглянем.
Влияние частоты переключения
Если углубиться в подробности, импульсные преобразователи постоянного тока в постоянный не совсем просты.На самом деле, они даже близко не просты, а частота переключения является фундаментальным параметром, который так или иначе влияет практически на все аспекты функциональности и производительности схемы. Таким образом, я собираюсь сосредоточиться на наиболее важных и практических соображениях и постараюсь представить информацию точно, но не погружаясь в сложные детали.
Следующие подразделы написаны с точки зрения коммутации на основе индуктора, но это не означает, что никакая информация не применима к регуляторам накачки заряда.
Шум
Когда я думаю о частоте коммутации, первое, что приходит на ум, — это шум, как кондуктивный, так и излучаемый. Вы не можете избавиться от шума переключения, перемещая вашу частоту вверх или вниз, но вы можете сделать сделать шум менее проблематичным.
Вы не можете избавиться от шума переключения, перемещая вашу частоту вверх или вниз, но вы можете сделать сделать шум менее проблематичным.
Основная идея здесь заключается в том, что ваш коммутатор будет генерировать шум на частоте переключения и на гармониках частоты переключения.
Этот график любезно предоставлен Analog Devices, взят из статьи об артефактах на выходе импульсного регулятора.Пик с надписью «уровень пульсации» соответствует основной частоте. Мы обсудим пульсации на выходе в конце этой статьи.
Регулируя основную частоту, вы можете «управлять» шумом, чтобы он не вступал в противоречие с чувствительной аналоговой схемой или ограничениями FCC на излучение.
Например: Предположим, что ваш преобразователь находится в непосредственной близости от АЦП, который производит выборку сигнала основной полосы частот 50 кГц. Если ваш коммутатор работает на частоте 1 МГц, вы сможете подавить шум, связанный с основной гармоникой и всеми гармониками, используя однополюсный или (лучше) двухполюсный фильтр нижних частот.
Использование более высокой частоты переключения иногда является простым способом борьбы с шумом, поскольку вы можете более эффективно решать проблемы, добавляя фильтр нижних частот. Однако вам нужно убедиться, что вы не увеличиваете шум в полосах частот, которые имеют более низкие пределы излучения или которые используются ближайшими радиочастотными схемами.
КПД
Мы не хотим снижать эффективность наших высокоэффективных импульсных регуляторов просто из-за неправильного выбора частоты переключения.Основная идея здесь в том, что более высокая частота означает меньшую эффективность.
Это имеет смысл, если задуматься: импульсное регулирование эффективно, потому что оно использует преимущества низкой рассеиваемой мощности, связанной с состояниями транзистора «полностью включен» и «полностью выключен». Существенное рассеивание мощности происходит только в промежуточной области между включением и выключением, и если транзистор переключается между включением и выключением чаще, больше энергии теряется и эффективность падает.
На следующем графике показан пример взаимосвязи между частотой переключения и КПД.
График взят из таблицы данных LT8610 от Linear Tech / Analog Devices.
Место для платы
Универсальность и высокая эффективность импульсных регуляторов делают их привлекательными вариантами для небольших устройств с батарейным питанием. Это означает, что площадь печатной платы иногда является решающим фактором в процессе проектирования. Важным аргументом в пользу более высокой частоты коммутации является уменьшение пространства на плате: в целом более высокая частота коммутации позволяет выходному фильтру преобразователя достигать сопоставимых характеристик с более низкими значениями емкости и индуктивности, а более низкие значения емкости и индуктивности соответствуют меньшим конденсаторам и катушкам индуктивности.
Пульсация
В первом подразделе (озаглавленном «Шум») рассматриваются помехи, которые создаются переключением преобразователя и затем передаются или излучаются в другие части системы или в расположенные поблизости электронные устройства. Это отличается от «пульсации», которая относится к периодическим изменениям, которые непосредственно присутствуют в выходном напряжении преобразователя.
Это отличается от «пульсации», которая относится к периодическим изменениям, которые непосредственно присутствуют в выходном напряжении преобразователя.
Важность пульсации варьируется от приложения к приложению. Цифровая схема очень устойчива к пульсациям питания, но некоторые аналоговые компоненты также обладают высокой устойчивостью, а именно компоненты с хорошим коэффициентом отклонения источника питания (PSRR) на соответствующей частоте .
Основная связь здесь заключается в том, что более высокая частота переключения означает меньшую пульсацию. Следующий график дает вам пример этого эффекта:
Сюжет взят из примечания к приложению (стр. 10), опубликованного Texas Instruments. Вы можете видеть, что как теоретические расчеты, так и моделирование SPICE показывают, что более высокая частота переключения приводит к меньшим колебаниям.
Вы должны быть осторожны, потому что, если вы увеличиваете частоту переключения, вы можете переместить частоту пульсации вверх в полосу, в которой ваши аналоговые компоненты имеют более низкий PSRR. На самом деле, это вполне вероятно, поскольку PSRR имеет тенденцию уменьшаться с увеличением частоты. Однако, возможно, вам повезет и вы получите такой компонент, как MAX40018 от Maxim:
На самом деле, это вполне вероятно, поскольку PSRR имеет тенденцию уменьшаться с увеличением частоты. Однако, возможно, вам повезет и вы получите такой компонент, как MAX40018 от Maxim:
.
График взят из этого листа данных.
PSRR сначала уменьшается с частотой, как и ожидалось, но затем увеличивается после 10 кГц. (Хотя мы не знаем, что происходит после 100 кГц.)
Резюме
Частота переключения преобразователя постоянного / постоянного тока влияет на многие аспекты функциональности схемы.Мне кажется, что наиболее важные отношения следующие:
- При более высокой частоте переключения шум легче контролировать (с помощью фильтрации), но в целом частоту следует регулировать в соответствии с характеристиками шума и требованиями каждой системы.
- Чем выше частота, тем ниже эффективность.
- При использовании более высоких частот требуется меньше места на плате (поскольку пассивные компоненты могут быть меньше).
- Повышенная частота переключения приводит к уменьшению амплитуды пульсаций.
Если у вас есть какие-либо мысли или практические советы по выбору частоты переключения для схемы преобразователя постоянного / постоянного тока, не стесняйтесь сообщить нам об этом в комментариях.
Что такое преобразователь частоты? Как это устроено?
Работа с переменной частотой в виде генератора переменного тока используется с момента появления асинхронного двигателя. Измените скорость вращения генератора, и вы измените его выходную частоту. До появления высокоскоростных транзисторов это был один из немногих вариантов, доступных для изменения скорости двигателя, однако изменения частоты были ограничены, поскольку уменьшение скорости генератора приводило к снижению выходной частоты, но не напряжения.Мы увидим, почему это важно, чуть позже. В нашей отрасли применения насосов с регулируемой скоростью в прошлом были намного сложнее, чем сегодня. Один из более простых методов заключался в использовании многополюсного двигателя, намотанного таким образом, чтобы переключатель (или переключатели) мог изменять количество полюсов статора, которые были активны в любой момент времени. Скорость вращения можно было изменять вручную или с помощью датчика, подключенного к переключателям. Этот метод до сих пор используется во многих насосных системах с переменным расходом.Примеры включают циркуляционные насосы горячей и охлажденной воды, насосы для бассейнов, а также вентиляторы и насосы градирни. В некоторых бытовых подкачивающих насосах использовались системы гидравлического привода или ременной передачи (своего рода автоматическая трансмиссия) для изменения скорости насоса на основе обратной связи от мембранного клапана давления. И несколько других были еще более сложными.
Скорость вращения можно было изменять вручную или с помощью датчика, подключенного к переключателям. Этот метод до сих пор используется во многих насосных системах с переменным расходом.Примеры включают циркуляционные насосы горячей и охлажденной воды, насосы для бассейнов, а также вентиляторы и насосы градирни. В некоторых бытовых подкачивающих насосах использовались системы гидравлического привода или ременной передачи (своего рода автоматическая трансмиссия) для изменения скорости насоса на основе обратной связи от мембранного клапана давления. И несколько других были еще более сложными.
Судя по обручам, через которые нам приходилось преодолевать в прошлом, становится довольно очевидно, почему появление современного преобразователя частоты произвело революцию (еще один каламбур) в среде насосов с регулируемой скоростью.Все, что вам нужно сделать сегодня, это установить относительно простой электронный блок (который часто заменяет более сложное пусковое оборудование) на месте применения и, внезапно, вы можете вручную или автоматически изменить скорость насоса по своему желанию.
Итак, давайте взглянем на компоненты преобразователя частоты и посмотрим, как они на самом деле работают вместе, чтобы изменять частоту и, следовательно, скорость двигателя. Думаю, вы удивитесь простоте этого процесса. Все, что для этого потребовалось, — это созревание твердотельного устройства, известного как транзистор.
Преобразователь частоты Компоненты
Выпрямитель
Поскольку трудно изменить частоту синусоидальной волны переменного тока в режиме переменного тока, первая задача преобразователя частоты — преобразовать волну в постоянный ток. Как вы увидите немного позже, относительно легко управлять постоянным током, чтобы он выглядел как переменный ток. Первым компонентом всех преобразователей частоты является устройство, известное как выпрямитель или преобразователь, оно показано слева на рисунке ниже.
Схема выпрямителя преобразует переменный ток в постоянный и делает это почти так же, как в зарядном устройстве для аккумуляторов или в аппарате для дуговой сварки. Он использует диодный мост для ограничения распространения синусоидальной волны переменного тока только в одном направлении. В результате получается полностью выпрямленная форма волны переменного тока, которая интерпретируется цепью постоянного тока как естественная форма волны постоянного тока. Трехфазные преобразователи частоты принимают три отдельные входные фазы переменного тока и преобразуют их в один выход постоянного тока. Большинство трехфазных преобразователей частоты также могут принимать однофазное питание (230 В или 460 В), но, поскольку есть только две входящие ветви, мощность преобразователя частоты (HP) должна быть снижена, поскольку производимый постоянный ток уменьшается пропорционально.С другой стороны, настоящие однофазные преобразователи частоты (те, которые управляют однофазными двигателями) используют однофазный вход и вырабатывают выход постоянного тока, который пропорционален входу.
Он использует диодный мост для ограничения распространения синусоидальной волны переменного тока только в одном направлении. В результате получается полностью выпрямленная форма волны переменного тока, которая интерпретируется цепью постоянного тока как естественная форма волны постоянного тока. Трехфазные преобразователи частоты принимают три отдельные входные фазы переменного тока и преобразуют их в один выход постоянного тока. Большинство трехфазных преобразователей частоты также могут принимать однофазное питание (230 В или 460 В), но, поскольку есть только две входящие ветви, мощность преобразователя частоты (HP) должна быть снижена, поскольку производимый постоянный ток уменьшается пропорционально.С другой стороны, настоящие однофазные преобразователи частоты (те, которые управляют однофазными двигателями) используют однофазный вход и вырабатывают выход постоянного тока, который пропорционален входу.
Есть две причины, по которым трехфазные двигатели более популярны, чем их однофазные счетчики, когда речь идет о работе с регулируемой скоростью. Во-первых, они предлагают гораздо более широкий диапазон мощности. Но не менее важна их способность начать вращение самостоятельно. С другой стороны, однофазный двигатель часто требует некоторого вмешательства извне, чтобы начать вращение.В этом случае мы ограничимся рассмотрением трехфазных двигателей, используемых в трехфазных преобразователях частоты.
Во-первых, они предлагают гораздо более широкий диапазон мощности. Но не менее важна их способность начать вращение самостоятельно. С другой стороны, однофазный двигатель часто требует некоторого вмешательства извне, чтобы начать вращение.В этом случае мы ограничимся рассмотрением трехфазных двигателей, используемых в трехфазных преобразователях частоты.
Шина постоянного тока
Второй компонент, известный как шина постоянного тока (показан в центре рисунка), не виден и не во всех преобразователях частоты, потому что он не вносит непосредственного вклада в работу с переменной частотой. Но всегда будут высококачественные преобразователи частоты общего назначения (производимые специализированными производителями преобразователей частоты).Не вдаваясь в подробности, шина постоянного тока использует конденсаторы и катушку индуктивности для фильтрации «пульсаций» переменного напряжения из преобразованного постоянного тока перед его поступлением в секцию инвертора. Он также может включать фильтры, препятствующие гармоническим искажениям, которые могут возвращаться в источник питания, питающий преобразователь частоты. Преобразователи частоты более старых версий и некоторые преобразователи частоты для конкретных насосов требуют отдельных сетевых фильтров для выполнения этой задачи.
Он также может включать фильтры, препятствующие гармоническим искажениям, которые могут возвращаться в источник питания, питающий преобразователь частоты. Преобразователи частоты более старых версий и некоторые преобразователи частоты для конкретных насосов требуют отдельных сетевых фильтров для выполнения этой задачи.
Инвертор
Справа от рисунка — «внутренности» преобразователя частоты.Инвертор использует три набора высокоскоростных переключающих транзисторов для создания «импульсов» постоянного тока, которые имитируют все три фазы синусоидальной волны переменного тока. Эти импульсы определяют не только напряжение волны, но и ее частоту. Термин инвертор или инверсия означает «реверсирование» и просто относится к движению вверх и вниз генерируемой формы волны. В современном преобразователе частоты преобразователь частоты использует метод, известный как «широтно-импульсная модуляция» (ШИМ), для регулирования напряжения и частоты. Мы рассмотрим это более подробно, когда рассмотрим выход инвертора.
Еще один термин, с которым вы, вероятно, столкнетесь, читая литературу или рекламу о преобразователях частоты, — это «IGBT». IGBT относится к «биполярному транзистору с изолированным затвором», который является переключающим (или импульсным) компонентом инвертора. Транзистор (который заменил электрическую лампу) выполняет две функции в нашем электронном мире. Он может действовать как усилитель и увеличивать сигнал, как в радио или стерео, или он может действовать как переключатель и просто включать и выключать сигнал. IGBT — это просто современная версия, которая обеспечивает более высокие скорости переключения (3000 — 16000 Гц) и пониженное тепловыделение.Более высокая скорость переключения приводит к повышению точности имитации волн переменного тока и снижению слышимого шума двигателя. Уменьшение выделяемого тепла означает меньшие радиаторы и, следовательно, меньшую площадь основания преобразователя частоты.
Выход инвертора
На рисунке справа показана форма сигнала, генерируемого инвертором преобразователя частоты ШИМ, по сравнению с формой истинного синусоидального сигнала переменного тока.![]() Выход инвертора состоит из серии прямоугольных импульсов с фиксированной высотой и регулируемой шириной.В этом конкретном случае есть три набора импульсов — широкий набор в середине и узкий набор в начале и конце как положительной, так и отрицательной частей цикла переменного тока. Сумма площадей импульсов равна эффективному напряжению истинной волны переменного тока (мы обсудим эффективное напряжение через несколько минут). Если бы вы отрезали части импульсов выше (или ниже) истинной волны переменного тока и использовали их для заполнения пустых пространств под кривой, вы бы обнаружили, что они почти идеально совпадают.Таким образом, преобразователь частоты регулирует напряжение, подаваемое на двигатель.
Выход инвертора состоит из серии прямоугольных импульсов с фиксированной высотой и регулируемой шириной.В этом конкретном случае есть три набора импульсов — широкий набор в середине и узкий набор в начале и конце как положительной, так и отрицательной частей цикла переменного тока. Сумма площадей импульсов равна эффективному напряжению истинной волны переменного тока (мы обсудим эффективное напряжение через несколько минут). Если бы вы отрезали части импульсов выше (или ниже) истинной волны переменного тока и использовали их для заполнения пустых пространств под кривой, вы бы обнаружили, что они почти идеально совпадают.Таким образом, преобразователь частоты регулирует напряжение, подаваемое на двигатель.
Сумма ширины импульсов и пустых промежутков между ними определяет частоту волны (отсюда ШИМ или широтно-импульсная модуляция), воспринимаемой двигателем. Если бы импульс был непрерывным (то есть без пробелов), частота все равно была бы правильной, но напряжение было бы намного больше, чем у истинной синусоидальной волны переменного тока. В зависимости от желаемого напряжения и частоты преобразователь частоты будет изменять высоту и ширину импульса, а также ширину пустых промежутков между ними.Хотя внутренние компоненты, обеспечивающие это, относительно сложны, результат элегантно прост!
В зависимости от желаемого напряжения и частоты преобразователь частоты будет изменять высоту и ширину импульса, а также ширину пустых промежутков между ними.Хотя внутренние компоненты, обеспечивающие это, относительно сложны, результат элегантно прост!
Теперь некоторые из вас, вероятно, задаются вопросом, как этот «поддельный» переменный ток (на самом деле постоянный ток) может управлять асинхронным двигателем переменного тока. В конце концов, разве не требуется переменный ток, чтобы «вызвать» ток и соответствующее ему магнитное поле в роторе двигателя? Что ж, переменный ток вызывает индукцию естественным образом, потому что он постоянно меняет направление. DC, с другой стороны, этого не делает, потому что он обычно неподвижен после активации цепи.Но постоянный ток может индуцировать ток, если его включать и выключать. Для тех из вас, кто достаточно взрослый, чтобы помнить, автомобильные системы зажигания (до появления твердотельного зажигания) имели набор точек в распределителе. Назначение очков было «импульсное» питание от аккумулятора в катушку (трансформатор). Это вызвало заряд в катушке, который затем увеличил напряжение до уровня, позволяющего свечам зажигания загореться. Широкие импульсы постоянного тока, показанные на предыдущем рисунке, на самом деле состоят из сотен отдельных импульсов, и именно это включение и выключение выхода инвертора позволяет возникать индукции через постоянный ток.
Действующее напряжение
Мощность переменного тока — довольно сложная величина, и неудивительно, что Эдисон почти выиграл битву за то, чтобы сделать постоянный ток стандартом в США. К счастью, для нас все сложности были объяснены, и все, что нам нужно сделать, это следовать правилам, изложенным до нас.
Одним из атрибутов, делающих переменный ток сложным, является то, что он непрерывно изменяет напряжение, переходя от нуля к некоторому максимальному положительному напряжению, затем обратно к нулю, затем к некоторому максимальному отрицательному напряжению и затем снова обратно к нулю. Как определить действительное напряжение, приложенное к цепи? На рисунке слева изображена синусоида 60 Гц, 120 В. Обратите внимание, однако, что его пиковое напряжение составляет 170 В. Как мы можем назвать это волной 120 В, если ее фактическое напряжение составляет 170 В? В течение одного цикла оно начинается с 0 В и повышается до 170 В, затем снова падает до 0. Оно продолжает падать до –170, а затем снова повышается до 0. Оказывается, площадь зеленого прямоугольника, верхняя граница которого находится на уровне 120 В, равна сумме площадей под положительной и отрицательной частями кривой.Может ли тогда 120 В быть средним? Ну, если бы вы усреднили все значения напряжения в каждой точке цикла, результат был бы примерно 108 В, так что это не должно быть ответом. Почему тогда значение, измеренное VOM, составляет 120 В? Это связано с тем, что мы называем «эффективным напряжением».
Как определить действительное напряжение, приложенное к цепи? На рисунке слева изображена синусоида 60 Гц, 120 В. Обратите внимание, однако, что его пиковое напряжение составляет 170 В. Как мы можем назвать это волной 120 В, если ее фактическое напряжение составляет 170 В? В течение одного цикла оно начинается с 0 В и повышается до 170 В, затем снова падает до 0. Оно продолжает падать до –170, а затем снова повышается до 0. Оказывается, площадь зеленого прямоугольника, верхняя граница которого находится на уровне 120 В, равна сумме площадей под положительной и отрицательной частями кривой.Может ли тогда 120 В быть средним? Ну, если бы вы усреднили все значения напряжения в каждой точке цикла, результат был бы примерно 108 В, так что это не должно быть ответом. Почему тогда значение, измеренное VOM, составляет 120 В? Это связано с тем, что мы называем «эффективным напряжением».
Если бы вы измерили тепло, выделяемое постоянным током, протекающим через сопротивление, вы бы обнаружили, что оно больше, чем тепло, производимое эквивалентным переменным током. Это связано с тем, что переменный ток не поддерживает постоянное значение в течение всего цикла.Если вы проделали это в лаборатории в контролируемых условиях и обнаружили, что определенный постоянный ток вызывает повышение температуры на 100 градусов, его эквивалент по переменному току приведет к увеличению на 70,7 градусов или всего 70,7% от значения постоянного тока. Следовательно, эффективное значение переменного тока составляет 70,7% от постоянного. Также оказывается, что эффективное значение переменного напряжения равно квадратному корню из суммы квадратов напряжения на первой половине кривой. Если пиковое напряжение равно 1, и вы должны были измерить каждое из отдельных напряжений от 0 до 180 градусов, эффективное напряжение будет равно 0.707 пикового напряжения. 0,707 пикового напряжения 170, показанного на рисунке, равно 120 В. Это эффективное напряжение также известно как среднеквадратическое или среднеквадратичное напряжение. Отсюда следует, что пиковое напряжение всегда будет в 1,414 пикового значения от эффективного напряжения.
Это связано с тем, что переменный ток не поддерживает постоянное значение в течение всего цикла.Если вы проделали это в лаборатории в контролируемых условиях и обнаружили, что определенный постоянный ток вызывает повышение температуры на 100 градусов, его эквивалент по переменному току приведет к увеличению на 70,7 градусов или всего 70,7% от значения постоянного тока. Следовательно, эффективное значение переменного тока составляет 70,7% от постоянного. Также оказывается, что эффективное значение переменного напряжения равно квадратному корню из суммы квадратов напряжения на первой половине кривой. Если пиковое напряжение равно 1, и вы должны были измерить каждое из отдельных напряжений от 0 до 180 градусов, эффективное напряжение будет равно 0.707 пикового напряжения. 0,707 пикового напряжения 170, показанного на рисунке, равно 120 В. Это эффективное напряжение также известно как среднеквадратическое или среднеквадратичное напряжение. Отсюда следует, что пиковое напряжение всегда будет в 1,414 пикового значения от эффективного напряжения. Ток 230 В переменного тока имеет пиковое напряжение 325 В, а 460 — пиковое напряжение 650 В. Мы увидим эффект пикового напряжения немного позже.
Ток 230 В переменного тока имеет пиковое напряжение 325 В, а 460 — пиковое напряжение 650 В. Мы увидим эффект пикового напряжения немного позже.
Что ж, я, вероятно, говорил об этом дольше, чем необходимо, но я хотел, чтобы вы получили представление об эффективном напряжении, чтобы вы поняли иллюстрацию ниже.В дополнение к изменению частоты преобразователь частоты также должен изменять напряжение, даже если напряжение не имеет ничего общего со скоростью, с которой работает двигатель переменного тока.
На рисунке показаны две синусоидальные волны 460 В переменного тока. Красный — это кривая 60 Гц, а синий — 50 Гц. Оба имеют пиковое напряжение 650 В, но 50 Гц намного шире. Вы можете легко увидеть, что площадь под первой половиной (0-10 мс) кривой 50 Гц больше, чем площадь первой половины (0-8,3 мс) кривой 60 Гц.И, поскольку площадь под кривой пропорциональна эффективному напряжению, его эффективное напряжение выше. Это увеличение эффективного напряжения становится еще более значительным при уменьшении частоты. Если позволить двигателю 460 В работать при этих более высоких напряжениях, его срок службы может значительно сократиться. Следовательно, преобразователь частоты должен постоянно изменять «пиковое» напряжение относительно частоты, чтобы поддерживать постоянное эффективное напряжение. Чем ниже рабочая частота, тем ниже пиковое напряжение и наоборот.По этой причине двигатели 50 Гц, используемые в Европе и некоторых частях Канады, рассчитаны на напряжение 380 В. Видите ли, я говорил вам, что кондиционер может быть немного сложным!
Теперь вы должны иметь довольно хорошее представление о работе преобразователя частоты и о том, как он управляет скоростью двигателя. Большинство преобразователей частоты предлагают пользователю возможность устанавливать скорость двигателя вручную с помощью многопозиционного переключателя или клавиатуры или использовать датчики (давления, расхода, температуры, уровня и т. Д.) Для автоматизации процесса.
Регулирование напряжения и частоты в автономных микросетях с использованием алгоритма Hybrid Big Bang-Big Crunch
Основные моменты
- •
Гибридный алгоритм Big Bang-Big Crunch применяется для регулирования напряжения в микросети.
- •
Оператор мутации используется для улучшения исследовательских возможностей метода HBB-BC.
- •
HBB-BC имеет лучшую скорость сходимости, чем сравниваемые алгоритмы.
Реферат
В этой статье предлагается оптимальная стратегия управления мощностью для инверторных блоков распределенной генерации (DG) в автономных микросетях. Он состоит из контроллеров мощности, напряжения и тока с пропорционально-интегральными (PI) регуляторами.Концепция спада используется для стратегии управления мощностью. Статические параметры в ПИ-регуляторах могут не обеспечить наиболее оптимальное решение из-за неизбежных изменений, происходящих в конфигурации микросети и нагрузках. В предлагаемом методе после изменения нагрузки в автономной микросети параметры ПИ-регулятора динамически регулируются для получения наиболее оптимальной рабочей точки, удовлетворяющей целевым функциям. Задача оптимизации формулируется как многоцелевое программирование с целевыми функциями минимизации перерегулирования / недорегулирования, времени установления, времени нарастания и абсолютной ошибки времени интегрирования (ITAE) в выходном напряжении.