Асинхронные исполнительные (или управляемые) двигатели, страница 2. Самоход асинхронного двигателя
Асинхронные исполнительные (или управляемые) двигатели, страница 2
Круговое вращающееся поле при амплитудном управлении независимо от режима работы двигателя имеет место при α е = 1, т. е. когда Uy=UB'=Uyo. Напряжение управления Uy0, соответствующее круговому полю, обычно принимается за номинальное. При всех других напряжениях управления Uy не равное Uyoполе двигателя эллиптическое, при Uy =0 — пульсирующее. Реверс двигателя при амплитудном управлении достигается путем изменения фазы напряжения управления на полпериода (180°).
При фазовом управлении (рис. 2, б) на обмотку возбуждения, так же как и при амплитудном управлении, подается напряжение сети (UB = U1= const). На обмотку управления подается постоянное по значению (амплитуде), равное приведенному напряжению возбуждения (UB'=UB/k) напряжение управления Uy=Uy0, которое в процессе регулирования изменяется по фазе (β=var). Величина сигнала управления обычно оценивается коэффициентом сигнала, за который здесь принимается sin β.
При сдвиге Uy и UBна четверть периода (90°), т. е. при sin β = 1, в двигателе независимо от режима работы (частоты вращения) имеет место круговое вращающееся поле. При 0 <sin β < l поле эллиптическое; при sin β = 0 — пульсирующее; при sin β <0 ротор двигателя изменяет направление вращения.
Амплитудно-фазовое управление асинхронным исполнительным двигателем в схемах автоматики осуществляется одним из двух способов: 1) в двигателях, у которых напряжение на обмотке возбуждения постоянно равно напряжению сети (Uв=U1= const), путем одновременного изменения, как по значению, так и по фазе напряжения управления Uу; 2) в двигателях, у которых последовательно с обмоткой возбуждения включается фазосдвигающий конденсатор (в конденсаторных двигателях) путем изменения напряжения управления Uу только по значению — амплитуде (рис.2, в).
На первый взгляд, второй способ является не амплитудно-фазовым, а амплитудным, однако это не так. Дело в том, что при изменении напряжения Uу по амплитуде в конденсаторном двигателе одновременно как по значению, так и по фазе изменяется напряжение непосредственно на обмотке возбуждения.
Изменение (регулирование) частоты вращения исполнительных двигателей при всех рассмотренных выше способах управления происходит за счет изменения характера—деформации вращающегося магнитного поля. Уменьшение частоты вращения достигается путем увеличения эллиптичности — возрастания обратно вращающегося поля, которое создает тормозящий момент. Недостатком такого регулирования является его неэкономичность. Наряду с рассмотренными выше тремя основными способами регулирования частоты вращения асинхронных исполнительных двигателей на практике, хотя и значительно реже, находят применение и некоторые другие способы регулирования: 1) регулирование пространственным сдвигом осей обмоток; 2) подмагничиванием постоянным током; 3) частотное регулирование; 4) импульсное регулирование и др.
С целью обеспечения устойчивой работы двигателя во всем диапазоне частот вращения от n=0 до n = nс, расширения зоны регулирования, а также устранения самохода асинхронные исполнительные двигатели изготовляются с роторами, имеющими большое активное сопротивление. Критическое скольжение асинхронных исполнительных двигателей в отличие от обычных асинхронных двигателей (у которых sK=0,1...0,5), всегда больше единицы. На рис. 3 представлены для сравнения механические характеристики обычного и исполнительного двигателей. Части характеристик, обеспечивающие устойчивую работу, выделены жирными линиями.
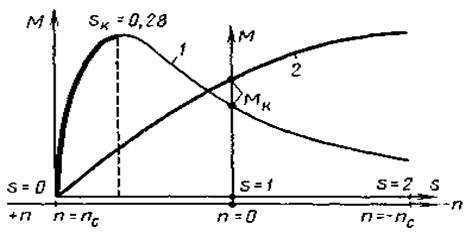
Рис. 3 - Механические характеристики асинхронных двигателей обычного — силового (1) и исполнительного (2)
Увеличение активного сопротивления ротора, обеспечивая необходимые исполнительному двигателю свойства, приводит к уменьшению механической мощности на валу и КПД. Номинальная мощность исполнительного двигателя примерно в 2...3 раза меньше номинальной мощности обычного двигателя того же габарита.
В настоящее время в качестве асинхронных исполнительных двигателей применяются исключительно двигатели с короткозамкнутыми роторами. В зависимости от конструкции ротора асинхронные исполнительные двигатели можно разделить на двигатели с полым немагнитным ротором, на двигатели с обычным ротором, имеющим обмотку, выполненную в виде «беличьей клетки», и на двигатели с полым ферромагнитным ротором.
Самоход и пути его устранения.
Самоходом называется вращение ротора асинхронного исполнительного двигателя при отсутствии сигнала управления (ае=0; sin p=0; a=0). На практике встречаются два вида самохода:
1. параметрический самоход, причиной которого является неправильный выбор параметров двигателя при его проектировании;
2. технологический самоход, появляющийся из-за технологических допусков и низкокачественного изготовления двигателя.
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу,— его ротор продолжает вращаться и после того, как с обмотки управления снят сигнал.
При снятии сигнала управления исполнительный двигатель практически становится однофазным. Известно, что если ротор обычного силового однофазного асинхронного двигателя приведен во вращение с помощью пусковой обмотки, то он не остановится и после отключения этой обмотки (соответствующей у исполнительных двигателей обмотке управления) при условии, что момент сопротивления будет не больше момента, развиваемого двигателем. Такое явление — явление самохода — недопустимо в исполнительных двигателях, так как в этом случае двигатель становится неуправляемым. Ротор исполнительного двигателя должен вращаться лишь при наличии сигнала (напряжения) на обмотке управления.
С целью устранения самохода асинхронные исполнительные двигатели изготовляют с повышенным активным сопротивлением ротора. Увеличение активного сопротивления ротора, как известно, смещает максимум механической характеристики в сторону меньших скоростей (больших скольжений s), в результате чего результирующий момент двигателя в однофазном режиме, являющийся суммой моментов от прямого и обратного полей, уменьшается а в том случае, когда критическое скольжение равно или больше единицы, становится даже отрицательным.
vunivere.ru
§ 1.5. Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Т е х н о л о г и ч е с к и й самоход проявляется в начале вращения двигателя при подаче только напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из-за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна вееробразная шихтовка пакетов - смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
П а р а м е т р и ч е с к и й самоход проявляется в продолжении вращения двигателя после снятия сигнала управления.
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
С целью устранения параметрического самохода асинхронные исполнительные двигатели изготавливаются с роторами, имеющими большое активное сопротивление. В результате момент однофазной машины становится не движущим (+) а тормозящим (-), в чем легко убедиться, рассматривая характеристики двух однофазных двигателей с различными критическими скольжениями: sк = 0,3 и sк = 1 (рис. 1.14,а и б).
Рис. 1.14. Механические характеристики однофазного двигателя с sk = 0,3 (а) и sk = 1 (б)
Таким образом, критические скольжения асинхронных исполнительных двигателей должны быть равными или большими единицы. В реальных двигателях sк= 2¸3, а отдельных случаях даже sк = 7¸8.
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В отличии от известной схемы [1], здесь отсутствуют индуктивные сопротивления ротора, которыми мы пренебрегли ввиду их малости по сравнению с активными сопротивлениями rр.
Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)
Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей
Самоход будет отсутствовать, если электромагнитная мощность машины будет равна нулю или даже отрицательной, т.е. Рэм <0. Это приводит к условию
(1.12)
Полные сопротивления вторичного контура преобразованных схем замещения
Их активные составляющие соответственно
Подставляя значения R21 и R22 в (1.12), получим
Если учесть, что для режима электромагнитного тормоза начальное скольжение s = 1, окончательно
Таким образом, для устранения самохода исполнительный двигатель должен иметь активное сопротивление ротора, приведенное к статору, большим или равным реактивному сопротивлению взаимной индуктивности.
При этом еще раз следует напомнить, что большое активное сопротивление ротора приводит к значительным потерям в обмотках, снижению КПД и ухудшению использования машины.
studfiles.net
Устранение - самоход - Большая Энциклопедия Нефти и Газа, статья, страница 4
Устранение - самоход
Cтраница 4
Самоходом называется непрерывное вращение диска при отсутствии тока в последовательной цепи под влиянием приложенного напряжения. Устранение самохода достигается с помощью отверстия в диске или стального антисамоходного флажка на оси диска, взаимодействующего с добавочным полюсом параллельной магнитной цепи. [46]
В соответствии с ГОСТ 6570 - 75 вращение диска счетчика под действием напряжения, поданного на зажимы параллельной цепи, и при отсутствии тока в последовательной цепи называется самоходом. Для устранения самохода на оси диска прикрепляют крючок 10 ( см. рис. 13.1) из ферромагнитного материала. Флажок / / намагничивается потоком Фв и, притягивая крючок 10, устраняет самоход. Таким образом, теперь, даже тогда, когда компенсационный момент больше момента трения, диск счетчика при токе / 0 не совершает более одного оборота, что в соответствии с ГОСТ 6570 - 75 считается отсутствием самохода. [47]
В соответствии с ГОСТ 6570 - 75 вращение диска счетчика под действием напряжения, поданного на зажимы параллельной цепи-и при отсутствии тока в последовательной цепи называется самохо1 дом. Для устранения самохода на оси диска прикрепляют крючок 10 ( см. рис. 13.1) из ферромагнитного материала. Флажок 11 намагничивается потоком Фв и, притягивая крючок 10, устраняет самоход. Таким образом, теперь, даже тогда, когда компенсационный момент больше момента трения, диск счетчика при токе / 0 не совершает более одного оборота, что в соответствии с ГОСТ 6570 - 75 считается отсутствием самохода. [48]
Это явление, называемое самоходом, недопустимо в исполнительном двигателе, так как делает его неуправляемым. Для устранения самохода ротор исполнительного двигателя делают с повышенным активным сопротивлением. [50]
Самоход возникает в том случае, если компенсационный момент больше момента трения, или от неточности сборки счетчика. Для устранения самохода, которого, согласно ГОСТ 6570 - 60, не должно быть при напряжениях 80 - 110 % номинального, существуют различные приемы. При вращении оси проволока своим незакрепленным концом подходит и притягивается к намагниченной потоками рассеяния железной пластинке Я ( называемой флажком), вследствие чего создается дополнительный тормозной момент, и подвижная часть останавливается. [52]
Самоход может появиться в результате разрегулирования счетчика, повышенного напряжения сети и даже при вибрациях стены, на которой установлен счетчик. Для устранения самохода на оси счетчика закрепляется стальная проволока или винт В ( см. рис. 7.9), а между магнитопроводом и обмоткой напряжения вставляется стальная пластинка С. Пластинка С намагничивается потоком рассеяния Ф8 и притягивает к себе винт В на оси с силой, достаточной для остановки подвижно системы при отсутствии тока нагрузки. С другой стороны, эта сила должна быть небольшой, чтобы даже при незначительном токе нагрузки диск начал вращаться. Порог чувствительности подвижности, или ток трогания счетчика, нормируется и является одной из основных его характеристик. [53]
Самоход от напряжения проверяют при подведении к обмотке напряжения тока напряжением 100 в при разомкнутой токовой обмотке. Для устранения самохода поворачивают стальной сердечник, расположенный внутри барабанчика, а также смещают обмотки напряжения вдоль их оси. [54]
Явление самохода может наблюдаться потому, что в счетчиках имеется устройство, создающее дополнительный ( компенсирующий) момент, не зависящий от нагрузки, для компенсации момента трения. Для устранения самохода счетчик снабжен приспособлением, которое производит легкое притяжение подвижной части при прохождении ею определенного положения. На рис 16.4 такое приспособление состоит из ферромагнитной пластинки 5 ( в зоне потока рассеяния параллельного электромагнита) и отогнутой ферромагнитной проволоки 6, укрепленной на оси. [55]
Такое явление называется самоходом счетчика - который может возникать, если компенсационный момент больше момента трения или от неточности сборки счетчика. Для устранения самохода, которого согласно ГОСТ но должно быть при напряжениях 80 - 110 % номинального, существуют различные приемы. Чаще всего к оси счетчика прикрепляется крючок К via стальной проволоки или тонкой пластины ( рис. 91) или используется винт, крепящий червячную передачу. При вращении оси проволока своим незакрепленным концом ( или винт) притягивается к намагниченной потоками рассеяния стальной пластинке Н ( называемой флажком), вследствие чего создается дополнительное торможение и подвижная часть останавливается. [57]
Методики устранения самохода и определения порога чувствительности, а также способы повышения чувствительности трехфазного счетчика аналогичны подобным операциям, выполняемым при ремонте однофазного счетчика. Отрегулированный счетчик проверяют на самоход при напряжениях, равных сначала 110 %, а затем 80 % номинального. При отсутствии тока в последовательных обмотках диск счетчика должен сделать не более одного полного оборота за время не менее 10 мин. [58]
Затем аналогичная проверка делается и по току: включается Q2 ( Q1 отключен), и при токе, равном максимальному току К. Если после устранения самохода по току появится самоход по напряжению, то регулирование начинается снова. [60]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Технологический самоход проявляется в начале вращения двигателя при подаче только напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из–за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна веерообразная шихтовка пакетов – смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
Параметрический самоход проявляется в продолжении вращения двигателя после снятия сигнала управления.
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
С целью устранения параметрического самохода асинхронные исполнительные двигатели изготавливаются с роторами, имеющими большое активное сопротивление. В результате момент однофазной машины становится не движущим (+) а тормозящим (–), в чем легко убедиться, рассматривая характеристики двух однофазных двигателей с различными критическими скольжениями: и (рис. 1.14,а и б).
Рис. 1.14. Механические характеристики однофазного двигателя с (а) и (б)
Таким образом, критические скольжения асинхронных исполнительных двигателей должны быть равными или большими единицы. В реальных двигателях , а отдельных случаях даже .
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В отличии от известной схемы [1], здесь отсутствуют индуктивные сопротивления ротора, которыми мы пренебрегли ввиду их малости по сравнению с активными сопротивлениями .
Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)
Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей
Самоход будет отсутствовать, если электромагнитная мощность машины будет равна нулю или даже отрицательной, т.е. . Это приводит к условию
(1.12)
Полные сопротивления вторичного контура преобразованных схем замещения
Их активные составляющие соответственно
;
Подставляя значения и в (1.12), получим
Если учесть, что для режима электромагнитного тормоза начальное скольжение , окончательно
Таким образом, для устранения самохода исполнительный двигатель должен иметь активное сопротивление ротора, приведенное к статору, большим или равным реактивному сопротивлению взаимной индуктивности.
При этом еще раз следует напомнить, что большое активное сопротивление ротора приводит к значительным потерям в обмотках, снижению КПД и ухудшению использования машины.
Дата добавления: 2015-07-24; просмотров: 88 | Нарушение авторских прав
Читайте в этой же книге: Бесконтактные двигатели постоянного тока | Дробные обмотки | Двигатели с электромагнитной редукцией | Двигатели с катящимся ротором | Двигатели с волновым ротором | Пьезоэлектрический эффект | Применение пьезоэлектрических микродвигателей | Электрические микромашины автоматических устройств | Общие сведения | Якорное управление исполнительным двигателем |mybiblioteka.su - 2015-2018 год. (0.013 сек.)mybiblioteka.su
Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Технологический самоход проявляется в начале вращения двигателя при подаче только напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из–за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна веерообразная шихтовка пакетов – смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
Параметрический самоход проявляется в продолжении вращения двигателя после снятия сигнала управления.
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
С целью устранения параметрического самохода асинхронные исполнительные двигатели изготавливаются с роторами, имеющими большое активное сопротивление. В результате момент однофазной машины становится не движущим (+) а тормозящим (–), в чем легко убедиться, рассматривая характеристики двух однофазных двигателей с различными критическими скольжениями: и (рис. 1.14,а и б).
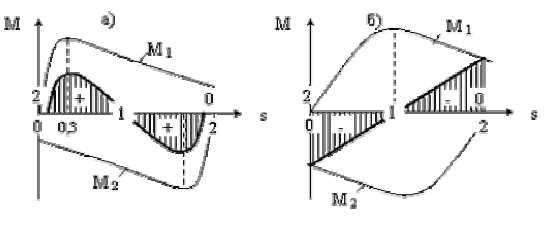
Рис. 1.14. Механические характеристики однофазного двигателя с (а) и (б)
Таким образом, критические скольжения асинхронных исполнительных двигателей должны быть равными или большими единицы. В реальных двигателях , а отдельных случаях даже .
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В отличии от известной схемы [1], здесь отсутствуют индуктивные сопротивления ротора, которыми мы пренебрегли ввиду их малости по сравнению с активными сопротивлениями .
Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)
Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей
Самоход будет отсутствовать, если электромагнитная мощность машины будет равна нулю или даже отрицательной, т.е. . Это приводит к условию
(1.12)
Полные сопротивления вторичного контура преобразованных схем замещения
Их активные составляющие соответственно
;
Подставляя значения и в (1.12), получим
Если учесть, что для режима электромагнитного тормоза начальное скольжение , окончательно
Таким образом, для устранения самохода исполнительный двигатель должен иметь активное сопротивление ротора, приведенное к статору, большим или равным реактивному сопротивлению взаимной индуктивности.
При этом еще раз следует напомнить, что большое активное сопротивление ротора приводит к значительным потерям в обмотках, снижению КПД и ухудшению использования машины.
infopedia.su
Исследование асинхронного исполнительного двигателя с полным немагнитным ротором
Содержание
1. Цель работы
2. Назначение АИД
3. Конструкция АИД
4. Магнитные поля АИД
5. Вращающий момент АИД
6. Способы управления АИД
7. Самоход и способы его устранения
8. Статические свойства АИД
9. Динамические свойства АИД
10. Программа экспериментальных исследований АИД
11. Расчеты и построения
12. Содержание отчета
13. Контрольные вопросы
Приложение А
Приложение Б
1. Цель работы
В настоящей лабораторной работе изучается назначение, конструкция, принцип действия, а также статические и динамические свойства асинхронного исполнительного двигателя переменного тока (АИД) с полым немагнитным ротором.
Изучаемый двигатель предназначен для работы в системах управления и автоматики (СУ и А) как преобразователь электрического сигнала, вырабатываемого устройством управления СУ и А, в скорость вращения или угол поворота вала.
Существуют три разновидности асинхронных исполнительных микродвигателей: с полым немагнитным ротором, с полым магнитным ротором и с короткозамкнутой обмоткой типа беличьего колеса. В СУ и А наибольшее распространение получили асинхронные исполнительные двигатели с полым немагнитным ротором. Такие двигатели производятся на мощности от сотых долей до нескольких сотен ватт, для стандартной – 50 Гц. и повышенных частот (200, 400,500 и 1000 Гц.) питающего напряжения. Скорость их вращения лежит в диапазоне 1500¸ 3000 oб/ мин.
Основными достоинствами асинхронных исполнительных двигателей с полым немагнитным ротором являются:
- Малый момент инерции J ротора.
- Значительный пусковой момент вследствие повышенного сопротивления ротора, что совместно с малым J приводит к значительному быстродействию двигателя, малой электромеханической постоянной времени и обеспечивает повышенную устойчивость следящих систем с таким типом двигателей.
- Механическая (выходная, нагрузочная) характеристика двигателя близка к прямолинейной за счёт большого активного сопротивления ротора, обеспечивающего значительное критическое скольжение (то есть скольжение при максимальном моменте
).- Широкий диапазон регулирования скорости (кратность регулирования
), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода.- Самоторможение двигателя при снятии сигнала управления (определяется большим
).- Отсутствие подвижных контактов, малый момент трения, отсутствие искрения и радиопомех, стабильность и надёжность в эксплуатации.
- Независимость параметров и характеристик двигателя от температуры, давления, влажности.
- Возможность улучшения массо-габаритных показателей при переходе к повышенным (400 ¸ 500 Гц.) частотам питающего напряжения.
Асинхронный исполнительный двигатель с полым немагнитным ротором имеет следующие недостатки:
- Большой немагнитный зазор в магнитной цепи машины (
), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности ().- Значительное электрическое сопротивление ротора и, как следствие, работа двигателя при больших скольжениях, что приводит к увеличению потерь энергии в статоре и роторе, а также к снижению КПД.
- Относительно увеличенные удельные (то есть приходящиеся на единицу полезной мощности) масса и габариты двигателя.
3. Конструкция АИД
Конструкция АИД должна решать задачу преобразования электрической энергии в механическую, приводящую во вращение вал двигателя с присоединённой нагрузкой (объектом управления). Это преобразование в общем виде описывается законом электромагнитного усилия, который утверждает, что механическая сила возникает при взаимодействии одноимённых полей (электрических или магнитных) и приложена к инерционным источникам этих полей.
В электромагнитных устройствах систем управления взаимодействуют два магнитных поля, причём одно поле должно создаваться той частью машины, которая будет вращаться, а источник второго поля может быть неподвижным. Поэтому в конструкции любой электрической машины имеется неподвижная часть- статор и подвижная- ротор.
В данной лабораторной работе исследуется АИД переменного тока с полым немагнитным ротором. Схема его конструкции показана на рисунке 1, а макет имеется на рабочем столе возле лабораторного стенда.
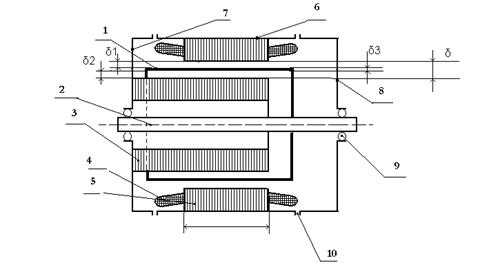
Рисунок 1 - Схема конструкции асинхронного исполнительного двигателя с полым немагнитным ротором
Неподвижная часть машины состоит из внешнего магнитопровода 5 с обмотками 4,внутреннего магнитопровода 3, корпуса 6, левого 7 и правого 8 подшипниковых щитов с подшипниками 9 и узлов 10 соединения корпуса со щитами. Подвижная часть машины содержит вал 2 с жёстко укреплённым на нём тонкостенным цилиндром 1. Внешний магнитопровод 5 неявнополюсный, представляет собой стальное кольцо собранное из листовой электротехнической стали, по внутренней поверхности которого расположены пазы, в которые укладываются две распределённые обмотки, изготовленные из изолированного медного провода круглого или прямоугольного сечения. Оси этих обмоток смещены в пространстве на 90 электрических градусов. Внутренний магнитопровод 3 также неявнополюсный,набран из листов электоротехнической стали и укреплён на цилиндрическом выступе одного из подшипниковых щитов 7. Он служит для уменьшения магнитного сопротивления на пути рабочего магнитного потока машины и не имеет пазов и обмоток.
В микродвигателях, мощность которых не превышает 1.5 Вт, диаметр расточки статора (внутренний диаметр внешнего магнитопровода 6) мал и для облегчения укладки обмоток пазы выполняют по внешней поверхности внутреннего магнитопровода 3. При этом его диаметр несколько увеличивают для увеличения обмоточного пространства. Иногда одну из обмоток размещают на внешнем, а другую на внутреннем магнитопроводе.
Корпус и подшипниковые щиты в микромашинах выполняются из алюминиевых сплавов. В крупных машинах эти части конструкции выполняются обычно сварными из стальных листов необходимой толщины, реже литыми. Подшипники чаще всего используются шариковые качения, а в крупных машинах - роликовые. Если от двигателя требуется бесшумная работа, применяют подшипники скольжения – бронзовые или бронзографитные. В микромашинах используются полузакрытые пазы для укладки обмоток – рисунок 2. Внутреннюю поверхность паза изолируют 1, заполняют проводниками обмотки 2 и закрепляют проводники деревянными или пластмассовыми клиньями 3. На рисунке 2 показан паз, выполненный на внешнем магнитопроводе, если же его выполнять на внутреннем магнитопроводе, то граница пройдёт по штриховой линии.
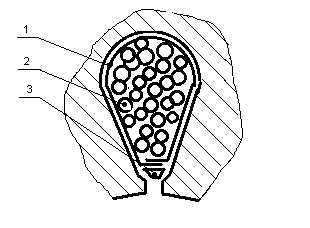
Рисунок 2 - Полузакрытый паз магнитопровода
Особенностью рассматриваемого двигателя является конструкция его ротора. Вал ротора 2 свободно вращается в подшипниках 9. На валу жёстко укреплён тонкостенный цилиндр 1, который также именуется стаканом. Стакан выполняется из немагнитного токопроводящего материала, как правило, из алюминиевых сплавов. Данная технология используется для получения минимальной механической инерционности двигателя, то есть для снижения его постоянной времени. Толщина стенок зависит от мощности двигателя и составляет
мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода мм. Общий воздушный зазор в двигателе мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.4. Магнитные поля АИД
Схема включения асинхронного исполнительного двигателя с полым немагнитным ротором показана на рисунке 3.
Теория вращающихся электромеханических преобразователей энергии показывает, что общее требование к работоспособной электрической машине заключается в том, чтобы магнитные поля ротора и статора обладали одинаковым количеством пар полюсов и были неподвижны относительно друг друга при работе машины в установившемся режиме. Значит, если поле ротора вращается, то для обеспечения неподвижности относительно него, поле статора тоже должно вращаться. Поле статора создаётся токами, протекающими по двум его обмоткам. Одна из них называется обмоткой возбуждения ОВ и постоянно находится под напряжением
. Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение на обмотку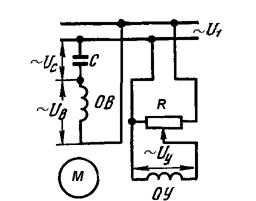
Рисунок 3 - Схема включения АИД
управления подаётся от устройства управления лишь в том случае если необходимо вращение ротора. Такая машина называется двухфазной. Чтобы эти две обмотки создавали вращающееся поле, их необходимо питать токами
и , сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0 суммарное поле равно полю возбуждения , так как ток максимален, а ток в обмотке управления в этот момент равен нулю. В момент t=t1 имеем wt=45°, , , . При t=t2 имеем wt=90°, , , и т. д. Очевидно, суммарный вектор по величине остаётся неизменным и равным , а по направлениюmirznanii.com
Асинхронные исполнительные двигатели | Онлайн журнал электрика
Асинхронные исполнительные движки употребляют в системах автоматического управления для управления и регулирования разных устройств.
Асинхронные исполнительные движки начинают действовать при подаче им электронного сигнала, который они конвертируют в данный угол поворота вала либо в его вращение. Снятие сигнала приводит к незамедлительному переходу ротора исполнительного мотора в недвижное состояние без использования каких-то тормозных устройств. Работа таких движков протекает всегда в критериях переходных режимов, в итоге чего скорость ротора часто при краткосрочном сигнале не добивается установившегося значения. Этому содействуют также нередкие запуски, конфигурации направления вращения и остановки.
По конструктивному оформлению исполнительные движки представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее 2-ух фаз смещены в пространстве относительно друг дружку не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят надлежащие переменные напряжения схожей частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с постоянным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 1, а, б, в).
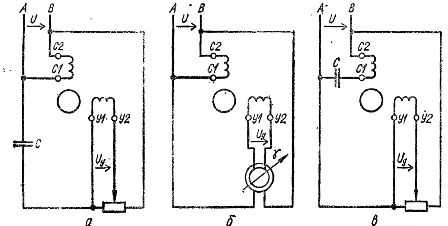
Рис. 1. Схемы включения асинхронных исполнительных движков при управлении: а — амплитудном, б — фазовом, в — амплитудно-фазовом.
В итоге этого в обеих фазах обмотки статора появляются надлежащие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов либо фазорегулятора смещены относительно друг дружку во времени, что приводит к возбуждению эллиптического крутящего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
При изменении режимов работы мотора эллиптическое крутящееся магнитное поле в предельных случаях перебегает в переменное с недвижной осью симметрии либо в радиальное крутящееся, что сказывается на свойствах мотора.
Запуск, регулирование скорости и остановка исполнительных движков определяются критериями формирования магнитного поля методом амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают постоянным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз меж этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 1, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются постоянными, а сдвиг фаз меж ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при всем этом, из-за наличия конденсатора в цепи возбуждения и электрического взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз меж этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Время от времени не считая конденсатора в цепи обмотки возбуждения предугадывают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, понижает энергопотери и улучшает, механические свойства асинхронного исполнительного мотора.
При амплитудном управлении радиальное крутящееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится эллиптическим. В случае фазового управления радиальное крутящееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз меж напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении радиальное крутящееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент запуска мотора, а потом по мере разгона ротора оно перебегает в эллиптическое.
При всех методах управления скорость ротора регулируют конфигурацией нрава вращающегося магнитного поля, а перемену направления вращения ротора производят конфигурацией фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
К асинхронным исполнительным исполнительным движкам предъявляют специальные требования в части отсутствия самохода, обеспечения широкого спектра регулирования скорости ротора, быстродействия, огромного исходного пускового момента и малой мощности управления при относительном сохранении линейности их черт.
Самоход асинхронных исполнительных движков проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обоснован или недостаточно огромным активным сопротивлением обмотки ротора — методический самоход, или плохим исполнением самого мотора — технологический самоход.
1-ый устраним при проектировании движков, предусматривающем изготовка ротора с завышенным сопротивлением обмотки и критичным скольжением sкр = 2 — 4, что, не считая того, обеспечивает широкий устойчивый спектр регулирования скорости ротора, а 2-ой — высококачественным созданием магнитопроводов и обмоток машин при кропотливой их сборке.
Потому что асинхронные исполнительные движки с ротором, имеющим короткозамкнутую обмотку с завышенным активным сопротивлением, отличаются маленьким быстродействием, характеризуемым электромеханической неизменной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 — 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным движкам с полым немагнитным ротором, у каких электромеханическая неизменная времени имеет наименьшее значение — Тм = 0,01 — 0,15 с.
Асинхронные исполнительные движки с полым немагнитным ротором, отличающиеся высочайшим быстродействием, имеют как наружный статор с магнитопроводом обыкновенной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите мотора.
Поверхности статоров разбиты воздушным зазором, который в круговом направлении имеет размер 0,4 — 1,5 мм. В воздушном зазоре находится стакан из дюралевого сплава со стеной шириной 0,2 — 1 мм, укрепленный на валу мотора. Ток холостого хода асинхронных движков с полым немагнитным ротором велик и доходит до 0,9Iном, а номинальный кпд = 0,2 — 0,4.
В установках автоматики и телемеханики используют движки с полым ферромагнитным ротором, у которого толщина стены 0.5 — 3 мм. В этих машинах, применяемых в качестве исполнительных и вспомогательных движков, внутренний статор отсутствует, а ротор укреплен на одной запрессованной либо 2-ух торцовых железных пробках.
Зазор меж поверхностями статора и ротора в круговом направлении составляет всего 0,2 — 0,3 мм.
Механические свойства движков с полым ферромагнитным ротором поближе к линейным, чем свойства движков с ротором, имеющим обыденную короткозамкнутую обмотку, также с ротором, выполненным в виде полого немагнитного цилиндра.
Время от времени внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди шириной 0,05 — 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для роста номинальных мощности и момента мотора, но кпд его при всем этом несколько миниатюризируется.
Существенными недочетами движков с полым ферромагнитным ротором является однобокое прилипание ротора к магнитопроводу статора из-за неравномерности зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у движков с полым ферромагнитным ротором отсутствует, они стабильно работают в спектре скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные движки с мощным ферромагнитным ротором выполненным в виде железного либо чугуного цилиндра без обмотки, отличаю простотой конструкции, высочайшей прочностью, огромным пусковым моментом, устойчивостью работы на данной скорости и могут быть применены при очень больших скоростях ротора.
Есть обращенные движки с мощным ферромагнитным ротором, который выполнен в вид внешней вращающейся части.
Асинхронные исполнительные движки изготавливают на номинальную мощность от толикой до нескольких сотен ватт и предопределяют для питания от источников переменного напряжения с частотой 50 Гц, также завышенных частот до 1000 Гц и выше.
elektrica.info









Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






