
устройство, принцип работы, область применения
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
Как устроен шаговый двигатель
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.
Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.
Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.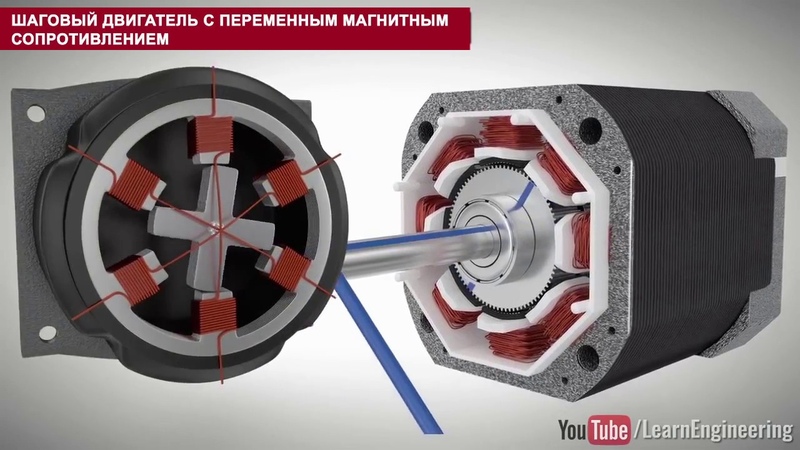
Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.


Недостатки:
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Материалы по теме:
Принцип работы и управления униполярного шагового двигателя
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость.
Отличие и разновидности шаговых двигателей
По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов. У них по сравнению с двигателем постоянного тока нет щёток, коллектора, а обмотки с меньшим количеством витков.
Среди первых двигателей был создан миниатюрный двигатель для ручных часов и назван в честь французского инженера Мариус Лавета. Статор расцеплен на краях или в районе ротора имеет небольшие сужения. Ротор диаметром 1.5 мм, магнитный на основе кобальта. Одна обмотка в один ряд питание 1.5 вольта. Угол поворота 90 градусов.
Моторчик лавета применяется также и в медицине для перекачки различной жидкости, а также часто используется в миксерах и блендерах.

В последнее время ведутся разработки пьезоэлектрических двигателей с использованием пьезомагнитного эффекта и применяя в конструкции ферромагнитные материалы. Совершенствуются линейные электродвигатели, у которых вал не вращается, а совершает линейные движения. Для оборудования точной механики российские производители выпускают двигатели с маркировкой серии:
- ДШ.
- ДШР.
- ДШГ.
- ДШЛ.
- ШД.
- ДШЭ
В производстве их участвуют такие предприятия, как НПО «АТОМ», ZETEK, компания Электропривод, Stepmotor, Вексон, НПО РИФ, Саратовский эл. механический, корпорация ВНИИЭМ, ЗАО Уралэлектромаш, АРК «Энергосервис». Производством ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD занимаются зарубежные фирмы: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и другие. Ассортимент выпускаемых ШД разнообразный: по типоразмерам, мощности, со встроенным редуктором и платой управления.
Конструкция и принцип работы
Шаговый двигатель состоит из статора и вращающегося ротора. Сердечник статора выполнен в виде набора листов электротехнической стали (штампованных). Это уменьшает вихревые токи и соответственно нагрев. Статор по окружности разбит на 4.6.8 продольных пазов. Применяется и больше. На выступах между пазами располагаются обмотки в виде катушек. Количество пазов соответствует количеству полюсов двигателя. Чем больше полюсов, тем меньше угол поворота ротора, то есть шаг.
Ротор состоит из одного или двух постоянных магнитов, с торцов, металлические пластины которого закреплены с зубьями. При этом плюса S и N постоянного магнита разбиваются на n полюсов, что соответствует количеству зубьев. Это также влияет на величину шага вращения. По конструкции ШД выпускаются трёх типов в зависимости от конструкции ротора:
- реактивный;
- ротор из постоянного магнита;
- гибридный.

Реактивный — ротор выполнен из ферромагнитного материала с продольными пазами, полюсами. Он используется редко, только для выполнения простых задач. В основном из-за того, что у него нет стопорящего момента. Гибридный — ротор изготовлен из двух половинок ферромагнитного материала, с продольными пазами и между ними расположен постоянный магнит. Пазы половинок относительно друг друга, сдвинуты на небольшой угол, для понижения шага. Они чаще всего применяются.
При подаче импульсного напряжения на обмотку статора образуется электромагнитное поле. Взаимодействуя, с ближайшим полюсом постоянного магнита создаётся крутящий момент. Вал двигателя поворачивается на определённый угол. Угол поворота в основном зависит от количества полюсов ротора.
Такой двигатель и будет называться шаговым. Благодаря небольшим размерам ШД серии Em 422 применяется в матричных принтерах.

Методы управления фазами
Управление в основном зависит от количества полюсов и конфигурации обмоток статора. ШД выпускаются в основном со следующими обмотками:
- Две обмотки с 4 выводами.
- Две обмотки с 6 проводами со средним выводом.
- Четыре обмотки — 8 выводов.
Управлять можно двумя методами, использовать однополярное напряжение — униполярное или двухполярное — биполярное. Униполярный шаговый двигатель имеет 4 полюса и 2 обмотки. У четырехфазного каждая обмотка разделена пополам и располагается на противоположных полюсах. Вращение осуществляется поочерёдной подачей напряжения на обмотки. При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины. Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
 com/embed/IwLzNK09bxU» allowfullscreen=»allowfullscreen»/>
com/embed/IwLzNK09bxU» allowfullscreen=»allowfullscreen»/>
Двигатели с биполярным управлением имеют 4 обмотки, по 2 на каждую фазу. Управление происходит при смене полярности обмотки. При таком управлении усложняется схема подключения шагового двигателя, но крутящий момент при этом получается больше. Основные характеристики — напряжение питания, потребляемый ток фазы, шаг, мощность и размер фланца. Посадочные места стандартизированы и указываются как, например, Nema 23. Это соответствует расстоянию между отверстиями под крепление 57 мм.
Способы управления шаговым двигателем
Применение ШД в станках с ЧПУ конкурирует только с сервоприводами, например, в эрозионных станках или принтерах, они даже превосходят их по своим техническим возможностям, себестоимости и простым схемам управления. Управление можно осуществлять на цифровых микросхемах, специализированных — А3977, на программированной PIC16, через ключи или драйверы SMSD 1.5.
Большинство драйверов управляются компьютером через порты RS-232, USB и LPT. Они вырабатывают сигналы управления: шаг, направление, разрешение и обеспечивают дробление шага на ½ до 1/32 и работают с программами: MACh4, KCam, DeskCNC, Turbocnc и другими. Кабелем подключить двигатель к драйверу согласно описанию. Изучив работу программы, запустить в работу несложно. Для включения используется напряжение от 5 вольт до 48 вольт. Исключения составляют двигатели на 220/110 вольт.
Они вырабатывают сигналы управления: шаг, направление, разрешение и обеспечивают дробление шага на ½ до 1/32 и работают с программами: MACh4, KCam, DeskCNC, Turbocnc и другими. Кабелем подключить двигатель к драйверу согласно описанию. Изучив работу программы, запустить в работу несложно. Для включения используется напряжение от 5 вольт до 48 вольт. Исключения составляют двигатели на 220/110 вольт.
Микрошаговый режим привода
Основное время работы ШД происходит в пошаговом или полушаговом режиме, а при пуске и остановке желательно использовать микрошаговый режим для точной фиксации. Пошаговый режим определён конструкцией и импульсным управлением. При микрошаговой работе на обмотки подаются синусоидальные напряжения с нужным сдвигом фаз.
Ротор фиксируется при определённом соотношении фаз токов в обмотках. Расчёт точки равновесия произвести по формуле x = S *pi/2*arctg a/b где:
- a — момент, создаваемый первой фазой и b — второй фазой;
- x — точка равновесия ротора или микрошаг в радианах;
- S — угол шага.

А также надо учитывать максимальную частоту управляющего сигнала, при которой нет потери или добавления лишнего шага в процессе работы. Она является основным показателем переходного режима шагового двигателя и обозначается в характеристиках, как частота приёмистости двигателя.
В процессе эксплуатации необходимо следить за чистотой вокруг привода и не допускать попадания металлической стружки, возможен выход из строя ШД. Найти способ защитить привод. Ремонт аналогичен ремонту коллекторного двигателя, требует аккуратности.
После разборки взять и продуть сжатым воздухом статор и ветошью протереть ротор. Проверить отсутствие биения подшипников.
Шаговые двигатели. Техническое описание
Шаговый двигатель –
это электромеханическое устройство, преобразующее сигнал управления в угловое (или линейное) перемещение
ротора с
фиксацией его в заданном положении без устройств обратной связи.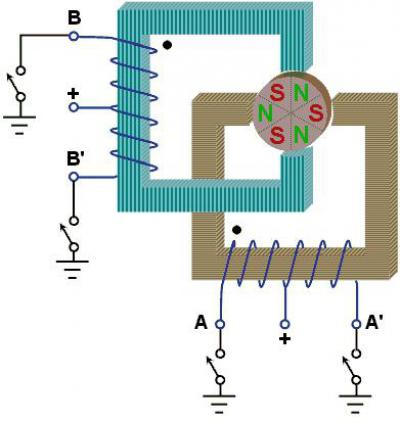 При проектировании конкретных систем
При проектировании конкретных систем
приходится
делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное
управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является
наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован
понижающий
редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у
котрых
момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же,
шаговые
двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что
ограничивает
максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые
двигатели с
редукторами хотя и существуют, однако являются экзотикой.
Виды шаговых двигателей:
Способы управления фазами шагового двигателя:
Зависимость момента от скорости, влияние нагрузки:
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. У идеального
шагового двигателя эта зависимость …далее
➠
Разгон шагового двигателя:
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости
из области
старта, а затем выполнить …далее
➠
Резонанс шагового двигателя:
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде
внезапного
падения момента на некоторых . ..далее
..далее
➠
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Преимущества шагового двигателя:
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от
3 до
5% от величины шага. Эта ошибка не накапливается от шага к шагу - возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически
определяется сроком
службы подшипников - однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к
валу
двигателя без промежуточного редуктора - может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных
импульсов
Оригинал этой статьи можно прочитать в журнале «Основы схемотехники», №6-7/2001. Автор — Л.Ридико
Дробление шага шагового двигателя
Для того, чтобы понять плюсы и минусы дробления шага (работы шагового двигателя в микрошаговом режиме),
сначала стоит
разобраться, что же это такое.
Микрошаговый режим – это режим, при котором происходит дробление шага большее чем 1/2 за счет получения
плавно
вращающегося поля статора, т.е. ток плавно снижается на одной обмотке и плавно нарастает на другой.
Благодаря этому
ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить
правильное
отношение токов в обмотках (фазах).
Из графика видно, что увеличивая дробление шага мы дискретно приближаемся к изменению значений токов в
обмотках по
закону Sin, со сдвигом фаз π/2.
Теоретически, благодаря микрошаговому режиму, мы можем повысить разрешение шагового двигателя. Например,
Например,
взяв
двигатель с углом поворота ротора 1.8° (200 шагов на оборот), при микрошаговом режиме 1/8 получаем 800 шагов
на
оборот, при дроблении 1/16 – 3200 шагов на оборот и так далее. На практике же, для большинства используемых
шаговых
двигателей, повышение дробления шага больше 1/8 не дает ожидаемого повышения разрешения двигателя. Это
происходит
из-за несовершенства деталей шагового двигателя, инерции ротора, силы трения и ряда других причин.
Но, помимо увеличения разрешающей способности шагового двигателя, микрошаговый режим помогает значительно
снизить
вибрации и избежать резонанса на низких частотах вращения шагового двигателя, это получается благодаря
меньшей длине
между двумя соседними положениями ротора, что снижает влияние инерционных характеристик.
Ниже приведен результат испытаний связки шаговый двигатель + блок управления SMD 4. 2 CAN в динамометрическом
2 CAN в динамометрическом
стенде.
Из графиков можно сделать вывод, что дробление шага отрицательно сказывается на величине максимального
момента
двигателя, но положительно влияет на его равномерность (особенно это видно при режиме 1/128). Так же
микрошаг сильно
снижает максимальное количество оборотов в минуту, которое может выдать шаговый двигатель. Это происходит
из-за того,
что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что
ведет к росту
потерь. Поэтому в драйверах нового поколения SMD-4.2i разгон и торможение двигателя происходит в
микрошаговых режимах,
а при увеличении скорости драйвер автоматически понижает дробления шага в момент, когда текущее дробление не
дает
преимуществ над меньшим дроблением для данной частоты вращения ротора шагового двигателя.
Можно подвести итог, обозначив плюсы и минусы работы шагового двигателя в микрошаговом режиме.
Плюсы:
- повышение разрешающей способности;
- значительное снижение вибраций;
- значительное снижение шума;
- выравнивание момента;
- избегание резонанса.
Минусы:
- снижение максимальной частоты вращения ротора;
- снижение максимального момента шагового двигателя.
Василий Фортуна, Сергей Сергеев
Шаговый двигатель: принцип работы и характеристики
Шаговые электродвигатели способны делать один полный оборот за несколько шагов и активно применяются в машиностроении и в печатающих устройствах. Основным преимуществом прибора является его точность.
Бесщеточный электродвигатель, в котором подача тока на обмотку статора приводит к фиксации ротора, называется шаговым. В нем происходит поочередная активация обмоток статора, вызывающая перемещения ротора (шаг) под определенным углом. Они применяются в машиностроении, при изготовлении факсимиле-машин и в космических аппаратах. Такие приборы реализуются в некоторых специализированных интернет-магазинах, например, в http://makerplus.ru/, где можно выбрать агрегат из нескольких вариантов.
В нем происходит поочередная активация обмоток статора, вызывающая перемещения ротора (шаг) под определенным углом. Они применяются в машиностроении, при изготовлении факсимиле-машин и в космических аппаратах. Такие приборы реализуются в некоторых специализированных интернет-магазинах, например, в http://makerplus.ru/, где можно выбрать агрегат из нескольких вариантов.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Самыми популярными моделями шаговых электродвигателей являются те, которые имеют угловое перемещение 1,8° и 200 шагов за один оборот, а также 0,9° с 400 шагами за один оборот, которые можно приобрести, например, на страничке интернет-магазина http://makerplus.ru/category/electrical-components-cnc.
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Шаговый двигатель • ru.knowledgr.com
Структура 2: главный электромагнит (1) выключен, и правильный электромагнит (2) возбужден, таща зубы в выравнивание с ним. Это приводит к вращению 3,6 ° в этом примере.
Структура 3: нижний электромагнит (3) возбужден; другое вращение на 3,6 ° происходит.
Структура 4: левый электромагнит (4) возбужден, вращаясь снова на 3,6 °. Когда главный электромагнит (1) будет снова позволен, ротор будет вращаться одним зубным положением; с тех пор есть 25 зубов, это сделает 100 шагов, чтобы сделать полное вращение в этом примере.]]
Шаговый двигатель (или шаговый двигатель) является бесщеточным электродвигателем DC, который делит полное вращение на многие равные шаги. Положением двигателя можно тогда приказать переместиться и держаться в одном из этих шагов без любого датчика обратной связи (диспетчер разомкнутого контура), пока двигатель тщательно измерен к применению.
Переключенные двигатели нежелания — очень большие ступающие двигатели с уменьшенным количеством полюса, и обычно являются commutated с обратной связью.
Основные принципы операции
DC чистился, двигатели вращаются непрерывно, когда напряжение постоянного тока применено к их терминалам. Шаговый двигатель известен его важной собственностью преобразовать поезд входного пульса (пульс типично прямоугольной волны) в точно определенное приращение в положении шахты. Каждый пульс перемещает шахту через фиксированный угол. Шаговым двигателям эффективно устроили многократные «имеющие зубы» электромагниты вокруг центрального куска формы механизма железа. Электромагниты возбуждены внешней цепью управления, такой как микродиспетчер. Чтобы заставить вал двигателя повернуться, во-первых, одному электромагниту дают власть, которая магнитно привлекает зубы механизма. Когда зубы механизма выровнены с первым электромагнитом, они немного возмещены от следующего электромагнита. Это означает, что, когда следующий электромагнит включен и первое выключено, механизм вращается немного, чтобы выровнять со следующим. Оттуда процесс повторен. Каждое из тех вращений называют «шагом» с числом целого числа шагов, делающих полное вращение. Таким образом двигатель может быть превращен точным углом.
Типы
Есть четыре главных типа шаговых двигателей:
- Степпер постоянного магнита (может быть подразделен на ‘консервную банку’ и ‘гибрид’, консервная банка, являющаяся более дешевым продуктом и гибридом с более высокими качественными подшипниками, меньшим углом шага, более высокой плотностью власти)
,
- Гибридный синхронный степпер
- Переменный степпер нежелания
- Тип Lavet, ступающий двигатель
Электродвигатели с постоянным магнитом используют постоянный магнит (PM) в роторе и воздействуют на привлекательность или отвращение между ротором пополудни и электромагнитами статора. Двигатели переменного нежелания (VR) имеют простой железный ротор и работают основанный на принципе, что минимальное нежелание происходит с минимальным промежутком, следовательно пункты ротора привлечены к магнитным полюсам статора. Гибридные шаговые двигатели называют, потому что они используют комбинацию пополудни и методы СТАБИЛОВОЛЬТА, чтобы достигнуть максимальной мощности в размере небольшого пакета.
Двухфазовые шаговые двигатели
Есть две основных вьющихся меры для электромагнитных катушек в двух шаговых двигателях фазы: биполярный и униполярный.
Униполярные двигатели
У
униполярного шагового двигателя есть тот, вьющийся с сигналом центра за фазу. Каждый раздел windings включен для каждого направления магнитного поля. С тех пор в этой договоренности магнитный полюс может быть полностью изменен, не переключая направление тока, схема замены может быть сделана очень простой (например, единственный транзистор) для каждого проветривания. Как правило, учитывая фазу, сигнал центра каждого проветривания сделан распространенным: предоставление три ведет за фазу, и шесть ведет для типичных двух двигателей фазы. Часто, к этим двум свободному городскому населению фазы внутренне присоединяются, таким образом, двигатель имеет, только пять ведут.
Микро диспетчер контроллера или шагового двигателя может использоваться, чтобы активировать транзисторы двигателя в правильном заказе, и эта непринужденность операции делает униполярные двигатели нравящимися людям, увлеченным своим хобби; они — вероятно, самый дешевый способ получить точные угловые движения.
(Для экспериментатора windings может быть определен, коснувшись проводов терминала вместе в пополудни двигателях. Если терминалы катушки связаны, шахта становится более твердой повернуться. один способ отличить сигнал центра (общий провод) от провода конца катушки, измеряя сопротивление. Сопротивление между общим проводом и проводом конца катушки всегда — половина того, что это между проводами конца катушки и концом катушки. Это вызвано тем, что есть дважды длина катушки между концами и только половиной от центра (общий провод) до конца.) Быстрый способ определить, работает ли шаговый двигатель, состоит в том, чтобы сорвать каждые две пары и попытаться повернуть шахту, каждый раз, когда более высокое, чем нормальное сопротивление чувствуют, это указывает, что схема к особому проветриванию закрыта и что фаза работает.
Биполярный двигатель
У
биполярных двигателей есть единственное проветривание за фазу. Ток во вьющиеся потребности, которые будут полностью изменены, чтобы полностью изменить магнитный полюс, таким образом, управляющая схема должна быть более сложной, как правило с договоренностью H-моста (однако, есть несколько стандартного жареного картофеля водителя, доступного, чтобы сделать это простым делом). Есть два, ведет за фазу, ни один не распространен.
Статические эффекты трения, используя H-мост наблюдались с определенной топологией двигателя.
Колеблясь сигнал степпера в более высокой частоте, чем двигатель может ответить на, уменьшит это «статическое трение» эффект.
Поскольку windings лучше используются, они более сильны, чем униполярный двигатель того же самого веса. Это происходит из-за физического места, занятого windings. У униполярного двигателя есть дважды сумма провода в том же самом космосе, но только наполовину используемый в любом пункте вовремя, следовательно на 50% эффективно (или приблизительно 70% вращающего момента производят доступный). Хотя биполярный шаговый двигатель более сложен, чтобы двигаться, изобилие жареного картофеля водителя означает, что этого намного менее трудно достигнуть.
Степпер с 8 лидерством — рана как униполярный степпер, но к приведению не присоединяются к общему внутренне для двигателя. Этот вид двигателя может быть телеграфирован в нескольких конфигурациях:
- Униполярный.
- Биполярный с рядом windings. Это дает более высокую индуктивность, но более низкий ток за проветривание.
- Биполярный с параллелью windings. Это требует более высокого тока, но может выступить лучше, поскольку вьющаяся индуктивность уменьшена.
- Биполярный с единственным проветриванием за фазу. Этот метод будет управлять двигателем на только половине доступного windings, который уменьшит доступный вращающий момент низкой скорости, но потребует менее текущего
Шаговые двигатели количества более высокой фазы
Многофазные шаговые двигатели со многими фазами имеют тенденцию иметь намного более низкие уровни вибрации. Часто они более дорогие, у них действительно есть более высокая плотность власти, и с соответствующим двигателем электроника фактически лучше подходит для применения.
Круги водителей шагового двигателя
Работа шагового двигателя решительно зависит от круга водителей. Кривые вращающего момента могут быть расширены на большие скорости, если полюса статора могут быть полностью изменены более быстро, ограничивающий фактор, являющийся вьющейся индуктивностью. Чтобы преодолеть индуктивность и переключить windings быстро, нужно увеличить напряжение двигателя. Это приводит далее к необходимости ограничения тока, который могут иначе вызвать эти высокие напряжения.
Круги водителей L/R
Круги водителей L/R также упоминаются, когда постоянное напряжение двигается, потому что постоянное положительное или отрицательное напряжение применено к каждому проветриванию, чтобы установить положения шага. Однако это проветривает ток, не напряжение, которое применяет вращающий момент к шахте шагового двигателя. Ток I в каждом проветривании связан с прикладным напряжением V вьющейся индуктивностью L и вьющимся сопротивлением R. Сопротивление R определяет ток максимума согласно закону Ома I=V/R. Индуктивность L определяет максимальный уровень изменения тока в проветривании согласно формуле для катушки индуктивности dI/dt = V/L. Таким образом, когда управляется Л/Р-Драйв, максимальная скорость шагового двигателя ограничена его индуктивностью, так как на некоторой скорости, напряжение U будет изменяться быстрее, чем ток, который я могу поддержать на высоком уровне. Простыми словами уровень изменения тока — L / R (например. индуктивность на 10 мГн с сопротивлением на 2 Ома займет 5 мс, чтобы достигнуть приблизительно 2/3 максимального вращающего момента или приблизительно 24 мс, чтобы достигнуть 99% макс. вращающего момента). Получить высокий вращающий момент на высоких скоростях требует большого напряжения двигателя с низким сопротивлением и низкой индуктивности.
С Л/Р-Драйв возможно управлять низким напряжением двигатель имеющий сопротивление с более высоким двигателем напряжения просто, добавляя внешний резистор последовательно с каждым проветриванием. Это потратит впустую власть в резисторах и выработает тепло. Это поэтому считают низким выбором выполнения, хотя простой и дешевый.
Схемы Чоппер-Драйв
Схемы Чоппер-Драйв упоминаются, когда постоянный ток двигается, потому что они производят несколько постоянный ток в каждом проветривании вместо того, чтобы применить постоянное напряжение. На каждом новом шаге очень высокое напряжение применено к проветриванию первоначально. Это заставляет ток в проветривании повышаться быстро с тех пор dI/dt = V/L, где V очень большое. Ток в каждом проветривании проверен диспетчером, обычно измерив напряжение через маленький резистор смысла последовательно с каждым проветриванием. Когда ток превышает указанный текущий предел, напряжение выключено или «расколото», как правило используя транзисторы власти. Когда вьющийся ток понижается ниже указанного предела, напряжение включено снова. Таким образом ток считается относительно постоянным для особого положения шага. Это требует дополнительной электроники к смыслу вьющийся ток, и управляйте переключением, но это позволяет шаговым двигателям вестись с более высоким вращающим моментом на более высоких скоростях, чем двигатели L/R. Интегрированная электроника с этой целью широко доступна.
Формы тока фазы
Шаговый двигатель — полифаза AC синхронный двигатель (см. Теорию ниже), и это идеально ведет синусоидальный ток. Полная форма волны шага — грубое приближение синусоиды и является причиной, почему двигатель показывает такую вибрацию. Методы Вэриэс-Драйв были развиты, чтобы лучше приблизить синусоидальную форму волны двигателя: это наполовину продвижение и микропродвижение.
Уов-Драйв (одна фаза на)
В этом методе двигателя только единственная фаза активирована за один раз. У этого есть то же самое число шагов как полный двигатель шага, но двигатель значительно меньше, чем оценит вращающий момент. Это редко используется. Оживленное число, показанное выше, является двигателем двигателя волны. В мультипликации у ротора есть 25 зубов, и это делает 4 шага, чтобы вращаться одним зубным положением. Таким образом, будет 25*4 =, 100 шагов за полное вращение и каждый шаг будут 360/100 = 3,6 градуса.
Полный двигатель шага (две фазы на)
Это — обычный метод для полного шага, ведя двигатель. Две фазы всегда находятся на так двигателе, обеспечит его максимальный номинальный вращающий момент. Как только одна фаза выключена, другой включен. Уов-Драйв и единственная фаза полный шаг оба одни и те же с тем же самым числом шагов, но различия во вращающем моменте.
Наполовину продвижение
Наполовину ступая, двигатель чередуется между двумя фазами на и единственной фазой на. Это увеличивает угловую резолюцию. У двигателя также есть меньше вращающего момента (приблизительно 70%) в полном положении шага (где только единственная фаза идет). Это может быть смягчено, увеличив ток в активном проветривании, чтобы дать компенсацию. Преимущество наполовину продвижения состоит в том, что электроника двигателя не должна изменяться, чтобы поддержать его. В оживленном числе, показанном выше, если мы изменяем его на наполовину продвижение, тогда, это сделает 8 шагов, чтобы вращаться 1 зубным положением. Таким образом, будет 25*8 =, 200 шагов за полное вращение и каждый шаг будут 360/200 = 1,8 °. Его угол за шаг — половина полного шага.
Микропродвижение
Что обычно упоминается, поскольку микропродвижение часто — «косинус синуса, микроступающий», в котором вьющийся ток приближает синусоидальную форму волны AC. Микропродвижение косинуса синуса — наиболее распространенная форма, но другие формы волны могут использоваться. Независимо от используемой формы волны, поскольку микрошаги становятся меньшими, моторная операция, становится более гладким, таким образом значительно уменьшая резонанс в любых частях, двигатель может быть связан с, а также сам двигатель. Резолюция будет ограничена механическим stiction, обратной реакцией и другими источниками ошибки между двигателем и устройством конца. Редукторы могут использоваться, чтобы увеличить разрешение расположения.
Воспроизводимость размера шага — важная особенность шагового двигателя и фундаментальная причина их использования в расположении.
Пример: много современных гибридных шаговых двигателей оценены таким образом, что путешествие каждого полного шага (пример 1,8 градуса за полный шаг или 200 полных шагов за революцию) будет в пределах 3% или 5% путешествия любого полного шага, пока двигатель управляется в пределах его указанных операционных диапазонов. Несколько изготовителей показывают, что их двигатели могут легко поддержать 3%-е или 5%-е равенство размера путешествия шага, поскольку размер шага уменьшен от полного понижения до продвижения 1/10. Затем когда микроступающее число делителя растет, воспроизводимость размера шага ухудшается. В больших сокращениях размера шага возможно дать много команд микрошага, прежде чем любое движение произойдет вообще, и затем движение может быть «скачком» в новое положение.
Теория
Шаговый двигатель может быть рассмотрен как синхронный электродвигатель переменного тока с числом полюсов (и на роторе и на статоре) увеличенный, заботясь это у них нет общего знаменателя. Кроме того, мягкий магнитный материал со многими зубами на роторе и статоре дешево умножает число полюсов (двигатель нежелания). Современные степперы имеют гибридный дизайн, имея оба постоянных магнита и мягкие железные ядра.
Чтобы достигнуть полного номинального вращающего момента, катушки в шаговом двигателе должны достигнуть своего полного номинального тока во время каждого шага. Вьющаяся индуктивность и обратная ЭДС, произведенная движущимся ротором, имеют тенденцию сопротивляться изменениям в токе двигателя, так, чтобы как частоты вращения двигателя, все меньше и меньше время было проведено в полном токе — таким образом уменьшающий моторный вращающий момент. Поскольку скорости далее увеличиваются, ток не достигнет номинальной стоимости, и в конечном счете двигатель прекратит производить вращающий момент.
Потяните — во вращающем моменте
Это — мера вращающего момента, произведенного шаговым двигателем, когда это управляется без состояния ускорения. На низких скоростях шаговый двигатель может синхронизировать себя с прикладной частотой шага, и это напряжение — во вращающем моменте должно преодолеть трение и инерцию. Важно удостовериться, что груз на двигателе фрикционный, а не инерционный, поскольку трение уменьшает любые нежелательные колебания.
Напряжение — в кривой определяет область, названную областью начала/остановки. В эту область двигатель может быть начат/остановлен мгновенно с примененным грузом и без потери синхронизма.
Вращающий момент отступления
Вращающий момент отступления шагового двигателя измерен, ускорив двигатель к желаемой скорости и затем увеличив вращающий момент, загружающий до моторных киосков или шагов промахов. Эти измерения проведены через широкий диапазон скоростей, и результаты используются, чтобы произвести динамическую кривую производительности шагового двигателя. Как отмечено ниже этой кривой затронут напряжением двигателя, током двигателя и текущими методами переключения. Проектировщик может включать запас прочности между номинальным вращающим моментом и предполагаемым вращающим моментом предельной нагрузки, требуемым для применения.
Вращающий момент стопора
У
синхронных электродвигателей, используя постоянные магниты есть резонирующее положение, держащее вращающий момент (названный вращающим моментом стопора или цевочным зацеплением, и иногда включаемый в технические требования) если не ведомый электрически. Мягкие железные ядра нежелания не показывают это поведение.
Звон и резонанс
Когда двигатель перемещает единственный шаг, он промахивается по пункту отдыха финала и колеблется вокруг этого пункта, как он останавливается. Этот нежелательный звон испытан как моторная вибрация и более явный в разгруженных двигателях. Разгруженный или под нагруженным двигателем, и часто будет, может остановиться, если опытной вибрации достаточно, чтобы вызвать потерю синхронизации.
У
шаговых двигателей есть естественная частота операции. Когда настройки по частоте возбуждения, этот резонанс, звон более явный, шаги, может быть пропущен, и остановка, более вероятны. Моторная частота резонанса может быть вычислена от формулы:
Вращающий момент M Holding cN · m
p Число пар полюса
J инерция Ротора kg · cm²
Рейтинги шагового двигателя и технические требования
Таблички с фамилией шаговых двигателей, как правило, дают только вьющийся ток и иногда напряжение и вьющееся сопротивление. Номинальное напряжение произведет номинальный вьющийся ток в DC: но это — главным образом бессмысленный рейтинг, поскольку все современные водители — ограничение тока, и напряжения двигателя значительно превышают моторное номинальное напряжение.
Вращающий момент низкой скорости степпера изменится непосредственно с током. То, как быстро вращающий момент уменьшается на более быстрых скоростях, зависит от вьющейся индуктивности и схемы двигателя, к которой это присоединено, особенно ведущее напряжение.
Степперы должны быть измерены согласно изданной кривой вращающего момента, которая определена изготовителем в особых напряжениях двигателя или использовании их собственной схемы двигателя.
Шаговые двигатели, адаптированные к резкой окружающей среде, часто упоминаются как оцененный IP65.
Заявления
Шаговые двигатели компьютера, которыми управляют, — тип системы позиционирования контроля движения. Ими, как правило, в цифровой форме управляют как часть системы разомкнутого контура для использования в удерживании или расположения заявлений.
В области лазеров и оптики они часто используются в оборудовании расположения точности, таком как линейные приводы головок, линейные стадии, стадии вращения, гониометры, и отражают горы. Другое использование находится в упаковочном оборудовании и расположении пилота клапана стадии для жидких систем управления.
Коммерчески, шаговые двигатели используются в дисководах, планшетных сканерах, компьютерных принтерах, заговорщиках, автоматах, сканерах изображения, двигателях компакт-диска, интеллектуальном освещении, объективах фотокамеры, машинах CNC и, позже, в 3D принтерах.
Система шагового двигателя
Система шагового двигателя состоит из трех основных элементов, часто объединяемых с некоторым типом пользовательского интерфейса (главный компьютер, PLC или немой терминал):
- Индексаторы — индексатор (или диспетчер) является микропроцессором, способным к созданию пульса шага и сигналов направления для водителя. Кроме того, индексатор, как правило, требуется, чтобы выполнять много других сложных функций команды.
- Водители — водитель (или усилитель) преобразовывает сигналы команды индексатора во власть, необходимую, чтобы возбудить двигатель windings. Есть многочисленные типы водителей с различным напряжением и строительной технологией и номинальными токами. Не все водители подходят, чтобы управлять всеми двигателями, поэтому проектируя систему управления движения, процесс выбора водителя важен.
- Шаговые двигатели — шаговый двигатель — электромагнитное устройство, которое преобразовывает цифровой пульс в механическое вращение шахты. Преимущества шаговых двигателей — низкая стоимость, высокая надежность, высокий вращающий момент на низких скоростях и простой, прочной конструкции, которая работает в почти любой окружающей среде. Главные недостатки в использовании шагового двигателя являются эффектом резонанса, часто показываемым на низких скоростях и уменьшающий вращающий момент с увеличивающейся скоростью.
См. также
- Почищенный электродвигатель DC
- Бесщеточный электродвигатель DC
- Фракционная лошадиная сила проезжает
- Серводвигатель
- Трехфазовые синхронные двигатели AC
- ULN2003A (шаговый двигатель) водитель IC
Внешние ссылки
Шаговый двигатель
: основы и принцип работы
Основы шагового двигателя
Что такое шаговый двигатель? Шаговый двигатель — это исполнительный механизм, преобразующий электрический импульс в угловое перемещение. Обычно при получении импульсного сигнала шаговый двигатель будет вращаться на фиксированный угол (а именно «угол шага») в соответствии с направлением, заданным для шагового двигателя. Объем углового смещения можно контролировать, контролируя количество импульсов для точного позиционирования.Между тем, скорость вращения и ускорение двигателя можно контролировать, регулируя частоту импульсов для достижения цели управления скоростью.
Принцип работы шагового двигателя
Как работает шаговый двигатель? Ротор шагового двигателя представляет собой постоянный магнит, когда ток течет через обмотку статора, обмотка статора создает векторное магнитное поле. Магнитное поле заставляет ротор вращаться на угол, так что пара магнитных полей ротора и направление магнитного поля статора согласованы.Когда векторное магнитное поле статора поворачивается на угол, ротор также вращается вместе с магнитным полем на угол. Каждый раз, когда подается электрический импульс, двигатель поворачивается еще на один градус. Выходное угловое смещение пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности намотки, двигатель будет реверсивным. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Типы шаговых двигателей
Шаговые двигатели делятся на три типа: шаговые двигатели с постоянными магнитами (PM), шаговые двигатели с переменным сопротивлением (VR) и гибридные шаговые двигатели (HB).
- Шаговый двигатель с постоянными магнитами обычно двухфазный, с небольшим крутящим моментом и малым объемом; его шаговый угол обычно составляет 7,5 ° или 15 °.
- VR обычно трехфазный, может быть реализован высокий крутящий момент; угол шага обычно составляет 1,5, но шум и вибрация велики; Магнитная цепь ротора шагового двигателя VR изготовлена из магнитомягких материалов.На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.
- HB, показывающий смешение преимуществ PM и VR, делится на 2-фазный, 3-фазный и 5-фазный. Угол шага для 2-фазной схемы обычно составляет 1,8 °, для 3-фазной схемы — 1,2 ° и для 5-фазной схемы — 0,72 °. В основном это широко применяется.
Шаговый двигатель
Шаговый двигатель
Выбор шагового двигателя
- Угол шага: необходимо выбрать угол шага двигателя в соответствии с требованиями точности нагрузки.Наименьший коэффициент разрешения нагрузки обычно преобразуется в вал двигателя, обратите внимание на угол для каждого коэффициента разрешения, а угол шага двигателя должен быть равен или меньше угла. Как правило, угол шага 2-фазной схемы электродвигатель 0,9 ° / 1,8 °, 3-фазный 1,2 ° и 5-фазный 0,36 ° / 0,72 °. Двухфазный шаговый двигатель ATO имеет угол шага 1,8 градуса, а трехфазный шаговый двигатель — угол шага 1,2 градуса.
- Статический крутящий момент: выберите статический крутящий момент в соответствии с нагрузкой двигателя, при этом нагрузку можно разделить на инерционную и фрикционную.При прямом запуске двигателя (как правило, с низкой на высокую скорость) следует учитывать два вида нагрузки. При запуске двигателя с ускорением учитывайте инерционную нагрузку; когда двигатель вращается с постоянной скоростью, учитывайте только фрикционную нагрузку. Как правило, статический крутящий момент должен быть в пределах 2-3-кратной нагрузки трения.
- Ток: Что касается двигателей с одинаковым статическим крутящим моментом, их характеристики движения сильно различаются из-за разницы в текущих параметрах.О величине тока можно судить по диаграмме характеристики крутящего момента и частоты.
Если вы ищете шаговый двигатель Nema 17, шаговый двигатель Nema 23, шаговый двигатель Nema 34, сайт ATO.com — лучший выбор для вас.
Шаговые двигатели
— Введение и принцип работы
Шаговый двигатель
— это специально разработанный двигатель постоянного тока, который может приводиться в действие путем подачи импульсов возбуждения на фазные обмотки. Их нельзя запустить, просто подключив положительный и отрицательный выводы источника питания.
Они управляются пошаговой последовательностью, которая генерируется контроллером. Двигатель двигается ступенчато в соответствии с этой последовательностью. В этом посте мы обсудим основную теорию шаговых двигателей.
Принтеры — отличный источник шаговых двигателей. Старые матричные принтеры имеют большой и маленький шаговые двигатели. Это шаговые двигатели, которые мне удалось извлечь из старых матричных принтеров из офиса моего отца.
Применения
Шаговые двигатели находят свое применение в промышленной автоматизации и робототехнике благодаря своей способности двигаться ступенчато.Эти двигатели используются в установках по изготовлению ИС. Эти двигатели являются неотъемлемой частью конструкции станков с ЧПУ (Computer Numeric Control) и x-y плоттеров.
Основная классификация шаговых двигателей
В зависимости от типа конструкции шаговые двигатели могут быть классифицированы как
- Шаговые двигатели с переменным сопротивлением (VR)
- Шаговые двигатели с постоянным магнитом (PM)
- Гибридные шаговые двигатели
Шаговый двигатель с переменным сопротивлением (VR)
Шаговые двигатели с переменным сопротивлением — это те, у которых ротор изготовлен из ферромагнитных материалов.Следовательно, когда статор возбужден, он становится электромагнитом, и ротор испытывает тянущее усилие в этом направлении. Ферромагнитное вещество всегда пытается выстроиться по пути минимального сопротивления.
При возбуждении катушек создается магнитное поле и изменяется сопротивление воздушного зазора. Следовательно, он называется шаговым двигателем с регулируемым сопротивлением. В этом двигателе направление двигателя не зависит от направления тока в обмотках.
Шаговый двигатель с постоянным магнитом (PM)
Здесь ротор постоянно намагничен.Следовательно, движение двигателя происходит из-за притяжения и отталкивания между магнитными полюсами статора и ротора.
В этом двигателе направление двигателя напрямую зависит от направления тока, протекающего в обмотках, поскольку магнитные полюса меняются местами, меняя направление тока, протекающего через ротор.
Гибридный шаговый двигатель
Гибридный шаговый двигатель, как следует из названия, представляет собой двигатель, предназначенный для обеспечения большей эффективности за счет сочетания плюсов как шагового двигателя с постоянным магнитом, так и шагового двигателя с регулируемым сопротивлением.
Шаговые двигатели VR и PM являются наиболее распространенным типом шаговых двигателей. Единственное отличие состоит в том, что в шаговом двигателе с регулируемым магнитным сопротивлением ротор сделан из ферромагнитного материала, а в случае шагового двигателя с постоянным магнитом ротор постоянно намагничен.
Заглянем внутрь шаговых двигателей!
Так как я не покупал моторы (технически я их купил, но не буквально), я не имел ни малейшего представления о конструкции мотора.Кроме того, не было никаких гарантийных вопросов, о которых я должен был беспокоиться. .
Открыв корпус, я обнаружил, что у меня гибридный шаговый двигатель. Эти двигатели также имели несколько полюсов в статоре и роторе.
Статор
Статор имел четыре провода, выходящих из двигателя, и на каждом из полюсов (намотанных медной проволокой) выступали зубцы. Следовательно, каждый из их выступающих зубцов ведет себя как отдельные полюсы статора. Вот изображение статора с проецируемыми полюсами.
Ротор
Мне потребовалось время, чтобы понять устройство ротора.Красными и синими горизонтальными линиями обозначены полюса ротора. Так получилось, что красные линии — это северные магнитные полюса, а синие линии — южные магнитные полюса.
Аналогично, первый столбец — Юг, а последний — Север. Каждый столбец называется стеком, и этот двигатель представляет собой двигатель с несколькими стеками (или двигатель с четырьмя стеками, если судить по номерам).
Это может быть трудно увидеть на изображении, но если внимательно присмотреться к месту, где появляется водяной знак, можно увидеть, что полюса соседних столбцов расположены зигзагообразно.Единственное логическое объяснение того, почему они это сделали, могло заключаться в том, чтобы еще больше уменьшить шагающего ангела.
Для расчета угла шага и количества шагов на оборот я должен посчитать полюса статора и ротора. Вы даже представить себе не можете, какая это утомительная работа, если вам не приходилось ее делать. А пока я дам мотору немного отдохнуть и перейду к самому маленькому мотору, чтобы мне не пришлось беспокоиться о силовой электронике, задействованной в управлении этим массивным мотором.
Обозначение проводов
Существуют шаговые двигатели с рядом выходящих из них проводов.Я видел 4, 5, 6 и 8-проводные шаговые двигатели. Это способ перебрать провода. Если вы купили двигатели у поставщика и знаете конфигурацию обмотки из таблицы данных, пропустите эту часть тестирования, если вы спешите.
Но когда-нибудь это может быть полезно (весь мир выбрасывает старые принтеры, и никогда не угадаешь, когда тебе повезет).
Уловка при идентификации проводов двигателей заключается в том, что обмотка статора двигателя будет иметь небольшое сопротивление. Могут быть моторы, которые попадают в одну из четырех категорий (судя по количеству проводов), как показано на изображении ниже.
После того, как вы определили схему обмотки вашего двигателя, вы можете взять мультиметр и начать измерение сопротивления между проводами.
- Сначала выберите один провод (любой провод) и используйте его в качестве контрольной точки.
- Начните отмечать сопротивление между этим проводом и другими проводами. Поддерживайте диапазон измерителя на некотором минимальном значении (скажем, 0-200 Ом).
- Некоторые должны вернуть «1». (1 означает, что значение сопротивления выходит за пределы выбранного диапазона) Это означает, что токовый провод и провод, который вы только что проверили, не соединены и, следовательно, имеют бесконечное сопротивление.
- Остальные случаи вы можете определить логически. Если вы предположите, что сопротивление A — A ’равно 2R, тогда A — COM должно иметь сопротивление R.
Примечание: Вышеупомянутый метод не сработает для 5-проводной конфигурации. Если вы уже разобрались с этим — отлично! в противном случае все провода будут контактировать друг с другом, и все будут считывать сопротивление 2R, за исключением COM, который будет читать только R. Хитрость заключается в том, чтобы найти COM, а затем использовать обычные методы анализа цепи для идентификации обмотки.
Последовательность шагов шаговых двигателей
Как я упоминал ранее, шаговые двигатели приводятся в движение не нормальным возбуждением, а последовательным возбуждением соседних фаз. Такая последовательность называется пошаговой последовательностью, поскольку они состоят из шагов.
Wave Drive Sequence
Это один из типов пошаговой последовательности. В этом методе по одной фазе. То есть, когда фаза A возбуждена, все остальные фазы выключены. Точно так же перед возбуждением следующей фазы первая выключается.Обмотки возбуждаются одна за другой в течение конечной длительности, как волна, отсюда и название. Вот схема пошаговой последовательности.
Последовательность полного шага
Последовательность полного шага или последовательность включения двух фаз — это когда одновременно возбуждаются две соседние фазные обмотки, так что ротор позиционируется в точке, равной для обоих полей. Вот схема пошаговой последовательности.
Half Step Sequence
Эта последовательность представляет собой сочетание волнового привода и последовательности полного шага.Первый из каждого из вышеперечисленных методов используется из первых двух этого сообщения. Как видите, при использовании этой последовательности угол шага уменьшается вдвое.
Micro Stepping
Это последний из методов пошаговой последовательности. Здесь ток возбуждения изменяется постепенно. Когда номинальный ток подается на фазу A и фаза B не возбуждается, ротор находится в вертикальном положении (шаг 1 приведенной выше диаграммы).
Теперь постепенно ток в фазе A уменьшается, а ток в фазе B постепенно увеличивается.Следовательно, ротор будет перемещаться на небольшой угол из-за результирующей напряженности магнитного поля фазы A и фазы B.
Когда ток в фазе A дополнительно уменьшается, а ток в фазе B увеличивается, ротор продолжает движение по часовой стрелке в очень маленькие шагающие ангелы. Когда величина токов как в фазе A, так и в фазе B равна, тогда напряженность магнитного поля одинакова, и, следовательно, ротор будет расположен между двумя фазами (шаг 2 на диаграмме выше).
После этого та же процедура повторяется для перевода ротора с шага 2 на шаг 3 на приведенной выше диаграмме.Используя такое возбуждение, мы можем добиться плавного движения ротора. Как вы могли догадаться, этот метод более сложен, чем другие методы, рассмотренные ранее.
Что читатели должны были добавить:
Случай № 1
Читатель Лаломания задал интересный вопрос в Reddit, и я подумал, что его следует добавить сюда. Вы можете прочитать настоящую ветку здесь.
«Единственное логическое объяснение того, почему они сделали это, — это дальнейшее уменьшение шагающего ангела.Разве это зигзагообразное расположение не важно для работы двигателя. Разве в противном случае полюса роторов не нейтрализовали бы друг друга? »
Я имел в виду, что в каждой горизонтальной стойке полюсов, скажем, они просто разместили чередующиеся полюса, между соседними полюсами должен быть некоторый зазор, чтобы сила полюса не ослабевала со временем. Шагающий ангел измеряется от центра одного полюса до другого, который в этом случае также будет включать зазор.
При наличии отдельных штабелей для каждого полюса и зигзагообразном расположении полюсов при вертикальном взгляде (сверху) полюса будет казаться чередующимися, хотя и дискретными по высоте цилиндра.Зазор на самом деле не нужен, кроме как между двумя стопками. Значит, шагающий ангел исключит разрыв. Значит, уменьшение угла шага.
Дело № 2
Вот еще один ответ, опять же от Reddit, который должен был быть здесь. Jtl3 предоставляет некоторые заметные различия между двигателями, которые могут показаться интересными.
При попытке сравнить электродвигатели с постоянным магнитом и электродвигатели с переменным магнитным сопротивлением магниты с постоянным магнитом часто изготавливаются из гнутой стали и довольно малы с низкой инерцией ротора.Как правило, они плохой конструкции. Двигатели VR, как правило, длинные и тонкие, с более слабыми подшипниками. Они могут вращаться очень быстро и часто издают «свистящий» звук.
Ни «шестеренки», что является отличительной чертой гибридных двигателей (когда вы их поворачиваете, они кажутся жесткими и зернистыми; магниты, выровненные с пластинами полюсов, позволяют почувствовать ступеньки).
Есть интересные последствия для различий в строительство тоже. Двигатели с постоянными магнитами намного дешевле, потому что их можно отливать, а не делать из пластин.VR имеют сравнительно низкий крутящий момент из-за тех же проблем, что и у асинхронных двигателей.
Двигатели VR почти всегда приводятся в действие в пошаговом режиме, но могут достигать гораздо меньших расстояний между шагами, поскольку у них нет проблем с геометрией статора, как у PM. Гибриды обладают более высоким крутящим моментом и более тихими, но сохраняют способность к расстоянию между ступенями за счет замены ротора на намагниченный. PM и гибридные — единственные типы, которые когда-либо были микрошаговыми, поскольку истинная VR не может быть (из-за того, как ротор намагничивается через индуктивность).
Заключение
В следующих постах мы обсудим интерфейс шаговых двигателей с микроконтроллером, чтобы понаблюдать за их поведением при различных типах возбуждения и, возможно, обсудим некоторую силовую электронику, участвующую в обеспечении высокого тока, необходимого для больших двигателей ( как тот, что был открыт в этом посте).
Что такое шаговый двигатель? Типы, конструкция, работа и применение
Типы шаговых двигателей — их конструкция, работа и применение
Изобретение специальных карт драйверов шаговых двигателей и других технологий цифрового управления для сопряжения шагового двигателя с системами на базе ПК являются причиной широкого распространения шаговых двигателей в последнее время.Шаговые двигатели становятся идеальным выбором для систем автоматизации, требующих точного управления скоростью или точного позиционирования, либо того и другого.
Как мы знаем, многие промышленные электродвигатели используются с управлением с обратной связью с обратной связью для достижения точного позиционирования или точного управления скоростью, с другой стороны, шаговый двигатель может работать с контроллером без обратной связи. Это, в свою очередь, снижает общую стоимость системы и упрощает конструкцию машины по сравнению с сервосистемой управления. Кратко остановимся на шаговом двигателе и его типах .
Что такое шаговый двигатель?
Шаговый двигатель — это бесщеточное электромеханическое устройство, которое преобразует последовательность электрических импульсов, приложенных к их обмоткам возбуждения, в точно определенное пошаговое механическое вращение вала. Вал двигателя вращается на фиксированный угол для каждого дискретного импульса. Это вращение может быть линейным или угловым, при вводе единичного импульса происходит одно шаговое движение.
Когда применяется последовательность импульсов, она поворачивается на определенный угол.Угол поворота вала шагового двигателя для каждого импульса называется углом шага, который обычно выражается в градусах.
Количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала двигателя регулируется путем управления количеством импульсов. Эта уникальная особенность делает шаговый двигатель подходящим для системы управления без обратной связи, в которой точное положение вала поддерживается с помощью точного количества импульсов без использования датчика обратной связи.
Если угол шага меньше, тем больше будет количество шагов на оборот и выше будет точность полученного положения. Углы шага могут составлять от 90 градусов до 0,72 градусов, однако обычно используемые углы шага составляют 1,8 градуса, 2,5 градуса, 7,5 градуса и 15 градусов.
Направление вращения вала зависит от последовательности импульсов, подаваемых на статор. Скорость вала или средняя скорость двигателя прямо пропорциональна частоте (частоте входных импульсов) входных импульсов, подаваемых на обмотки возбуждения.Следовательно, если частота низкая, шаговый двигатель вращается ступенчато, а при высокой частоте он постоянно вращается, как двигатель постоянного тока, за счет инерции.
Как и все электродвигатели, он имеет статор и ротор. Ротор — подвижная часть, не имеющая обмоток, щеток и коллектора. Обычно роторы либо с переменным сопротивлением, либо с постоянными магнитами. Статор часто состоит из многополюсных и многофазных обмоток, обычно из трех или четырех фазных обмоток, намотанных на необходимое количество полюсов, определяемое желаемым угловым смещением на входной импульс.
В отличие от других двигателей он работает с запрограммированными дискретными импульсами управления, которые подаются на обмотки статора через электронный привод. Вращение происходит за счет магнитного взаимодействия между полюсами последовательно запитанной обмотки статора и полюсами ротора.
Конструкция шагового двигателя
На современном рынке доступно несколько типов шаговых двигателей с широким диапазоном размеров, количества шагов, конструкций, проводки, передачи и других электрических характеристик.Поскольку эти двигатели могут работать в дискретном режиме, они хорошо подходят для взаимодействия с устройствами цифрового управления, такими как компьютеры.
Благодаря точному контролю скорости, вращения, направления и углового положения, они представляют особый интерес в системах управления промышленными процессами, станках с ЧПУ, робототехнике, системах автоматизации производства и контрольно-измерительных приборах.
Типы шаговых двигателей
Существует три основных категории шаговых двигателей , а именно:
- Шаговый двигатель с постоянным магнитом
- Шаговый двигатель с переменным сопротивлением
9006
900 Во всех этих двигателях в статоре используются обмотки возбуждения, где количество обмоток относится к количеству фаз.
Напряжение постоянного тока подается в качестве возбуждения на катушки обмоток, и каждый вывод обмотки подключается к источнику через твердотельный переключатель. В зависимости от типа шагового двигателя конструкция его ротора включает ротор из мягкой стали с выступающими полюсами, цилиндрический ротор с постоянными магнитами и постоянный магнит с зубьями из мягкой стали. Обсудим эти типы подробнее.
Шаговый двигатель с переменным сопротивлением
Это базовый тип шагового двигателя , который существует уже долгое время и обеспечивает самый простой способ понять принцип работы с точки зрения конструкции.Как следует из названия, угловое положение ротора зависит от сопротивления магнитной цепи, образованной между полюсами (зубцами) статора и зубьями ротора.
Шаговый двигатель с регулируемым сопротивлением
Конструкция шагового двигателя с регулируемым сопротивлением
Он состоит из статора с обмоткой и многозубого ротора из мягкого железа. Статор состоит из листов кремнистой стали, на которые намотаны обмотки статора. Обычно он наматывается на три фазы, которые распределяются между парами полюсов.
Количество полюсов на статоре, сформированное таким образом, равно кратному количеству фаз, для которых обмотки намотаны на статоре. На рисунке ниже статор имеет 12 равноотстоящих полюсов, каждый из которых намотан возбуждающей катушкой. Эти три фазы получают питание от источника постоянного тока с помощью твердотельных переключателей.
Ротор не имеет обмоток и является явнополюсным, полностью изготовленным из листовой стали с прорезями. Выступающие зубья полюса ротора имеют такую же ширину, как и зубцы статора.Число полюсов статора отличается от числа полюсов ротора, что обеспечивает возможность самозапуска и двунаправленного вращения двигателя.
Отношение полюсов ротора к полюсам статора для трехфазного шагового двигателя определяется как Nr = Ns ± (Ns / q). Здесь Ns = 12 и q = 3, и, следовательно, Nr = 12 ± (12/3) = 16 или 8. Ниже показан 8-полюсный ротор без возбуждения.
Конструкция шагового двигателя с переменным сопротивлением
Работа шагового двигателя с переменным сопротивлением
Шаговый двигатель работает по принципу , согласно которому ротор совмещается в определенном положении с зубцами полюса возбуждения в магнитной цепи с минимальным сопротивлением путь существует.Когда к двигателю подается питание и возбуждая конкретную обмотку, он создает свое магнитное поле и развивает свои собственные магнитные полюса.
Из-за остаточного магнетизма в полюсах магнита ротора это заставит ротор перемещаться в такое положение, чтобы достичь положения минимального сопротивления, и, следовательно, один набор полюсов ротора выровнен с набором полюсов статора под напряжением. В этом положении ось магнитного поля статора совпадает с осью, проходящей через любые два магнитных полюса ротора.
Когда ротор совмещен с полюсами статора, он обладает достаточной магнитной силой, чтобы удерживать вал от перемещения в следующее положение по часовой стрелке или против часовой стрелки.
Рассмотрим принципиальную схему 3-х фазного, 6 полюсов статора и 4 зубьев ротора, показанную на рисунке ниже. Когда на фазу A-A ’подается постоянный ток путем замыкания переключателя -1, обмотка становится магнитом, в результате чего один зуб становится северным, а другой — южным. Таким образом, магнитная ось статора лежит вдоль этих полюсов.
Благодаря силе притяжения, северный полюс обмотки статора притягивает ближайший зуб ротора противоположной полярности, то есть южный и южный полюс притягивают ближайший зуб ротора противоположной полярности, то есть север. Затем ротор настраивается в положение с минимальным сопротивлением, при котором магнитная ось ротора точно совпадает с магнитной осью статора.
Работа шагового двигателя с переменным сопротивлением
Когда на фазу B-B ‘подается питание путем замыкания переключателя -2, сохраняя фазу A-A’ обесточенной путем размыкания переключателя-1, обмотка B-B ‘будет создавать магнитный поток и, следовательно, магнитная ось статора смещается вдоль образованных им полюсов.Следовательно, ротор смещается в сторону наименьшего сопротивления с намагниченными зубцами статора и вращается на угол 30 градусов по часовой стрелке.
Когда переключатель-3 находится под напряжением после размыкания переключателя-2, активируется фаза C-C ’, зубья ротора выравниваются в новом положении путем перемещения на дополнительный угол 30 градусов. Таким образом, ротор движется по часовой стрелке или против часовой стрелки, последовательно возбуждая обмотки статора в определенной последовательности. Угол шага этого 3-фазного 4-полюсного шагового двигателя с зубьями ротора выражается как 360 / (4 × 3) = 30 градусов (как угол шага = 360 / Nr × q).
Угол шага можно дополнительно уменьшить, увеличив количество полюсов на статоре и роторе, в этом случае двигатели часто имеют дополнительные фазные обмотки. Это также может быть достигнуто за счет принятия другой конструкции шаговых двигателей , такой как многостековая конструкция и механизм понижающей передачи.
Шаговый двигатель с постоянным магнитом
Двигатель с постоянным магнитом, пожалуй, самый распространенный среди нескольких типов шаговых двигателей.Как следует из названия, он добавляет постоянные магниты в конструкцию двигателя. Этот тип шаговых двигателей также обозначается как мотор-накопитель или мотор-цилиндр . Главное достоинство этого мотора — невысокая стоимость изготовления. Этот тип двигателя имеет 48-24 шага на оборот.
Шаговый двигатель с постоянным магнитом
Конструкция Шаговый двигатель с постоянным магнитом
В этом двигателе статор является многополюсным, и его конструкция аналогична конструкции шагового двигателя с переменным магнитным сопротивлением, как описано выше.Он состоит из шлицевой периферии, на которую намотаны катушки статора. Он имеет выступающие полюса на щелевой конструкции, где намотанные обмотки могут быть двух-, трех- или четырехфазными.
Концевые выводы всех этих обмоток выкуплены и подключены к цепи возбуждения постоянного тока через твердотельные переключатели в цепи управления.
Конструкция Шаговый двигатель с постоянным магнитом
Ротор изготовлен из материала постоянного магнита, такого как феррит, который может иметь форму цилиндрического или выступающего полюса, но обычно это гладкий цилиндрический тип.Ротор имеет четное количество полюсов постоянного магнита с чередованием северной и южной полярностей.
Работа шагового двигателя с постоянным магнитом
Принцип действия этого двигателя основан на том, что разные полюса притягиваются друг к другу, а подобные полюса отталкиваются. Когда обмотки статора возбуждаются источником постоянного тока, он создает магнитный поток и устанавливает северный и южный полюса. Из-за силы притяжения и отталкивания между полюсами ротора постоянного магнита и полюсами статора, ротор начинает двигаться вверх в положение, для которого на статор подаются импульсы.
Рассмотрим двухфазный шаговый двигатель с двумя полюсами ротора с постоянными магнитами, как показано на рисунке ниже.
Работа шагового двигателя с постоянным магнитом:
Когда фаза A запитана плюсом по отношению к A ’, обмотки устанавливают северный и южный полюса. Из-за силы притяжения полюса ротора совпадают с полюсами статора, так что ось магнитного полюса ротора регулируется с осью статора, как показано на рисунке.
Когда возбуждение переключается на фазу B и отключается фаза A, ротор дополнительно настраивается на магнитную ось фазы B и, таким образом, поворачивается на 90 градусов по часовой стрелке.
Затем, если в фазу A подается ток, отрицательный по отношению к A ’, образование полюсов статора заставляет ротор перемещаться еще на 90 градусов по часовой стрелке.
Таким же образом, если фаза B возбуждается отрицательным током путем замыкания переключателя фазы A, ротор поворачивается еще на 90 градусов в том же направлении. Затем, если фаза A возбуждается положительным током, ротор возвращается в исходное положение, совершая полный оборот на 360 градусов.Это означает, что всякий раз, когда статор возбужден, ротор стремится повернуться на 90 градусов по часовой стрелке.
Угол шага этого 2-фазного 2-полюсного роторного двигателя с постоянными магнитами выражается как 360 / (2 × 2) = 90 градусов. Размер шага может быть уменьшен путем подачи питания на две фазы одновременно или последовательностью режимов однофазного включения и двухфазного включения с правильной полярностью.
Гибридный шаговый двигатель
Это самый популярный тип шагового двигателя , поскольку он обеспечивает лучшую производительность, чем ротор с постоянным магнитом, с точки зрения шагового разрешения, удерживающего момента и скорости.Однако эти двигатели дороже шаговых двигателей с постоянными магнитами. Он сочетает в себе лучшие характеристики шаговых двигателей с переменным сопротивлением и шаговых двигателей с постоянными магнитами. Эти двигатели используются в приложениях, где требуется очень маленький шаговый угол, например 1,5, 1,8 и 2,5 градуса.
Гибридный шаговый двигатель
Конструкция гибридного шагового двигателя
Статор этого двигателя такой же, как у его постоянного магнита или аналога реактивного типа. Катушки статора намотаны на чередующиеся полюсы.При этом катушки разных фаз намотаны на каждый полюс, обычно две катушки на полюсе, что называется бифилярным соединением.
Ротор состоит из постоянного магнита, намагниченного в осевом направлении для создания пары магнитных полюсов (N и S полюсов). Каждый полюс покрыт равномерно расположенными зубцами. Зубья состоят из мягкой стали и двух секций, на каждом полюсе которых смещены друг к другу с шагом ползуба.
Работа гибридного шагового двигателя
Этот двигатель работает так же, как и шаговый двигатель с постоянными магнитами.На рисунке выше показан двухфазный, 4-полюсный гибридный шаговый двигатель с 6 зубьями. Когда фаза A-A ’возбуждается источником постоянного тока, сохраняя невозбужденный B-B’, ротор выравнивается так, что южный полюс ротора обращен к северному полюсу статора, а северный полюс ротора обращен к южному полюсу статора.
Работа гибридного шагового двигателя
Теперь, если фаза B-B ‘возбуждена, удерживая A-A’ выключенным таким образом, что верхний полюс становится северным, а нижний — южным, тогда ротор будет выровнен в новое положение на движение против часовой стрелки.Если фаза B-B ’возбуждается противоположно, так что верхний полюс становится южным, а нижний — северным, то ротор будет вращаться по часовой стрелке.
При правильной последовательности импульсов на статор двигатель будет вращаться в нужном направлении. При каждом возбуждении ротор блокируется в новом положении, и даже если возбуждение снимается, двигатель по-прежнему сохраняет заблокированное состояние из-за возбуждения постоянным магнитом. Угол шага этого 2-фазного, 4-полюсного, 6-зубчатого роторного двигателя составляет 360 / (2 × 6) = 30 градусов.На практике гибридные двигатели конструируются с большим количеством полюсов ротора, чтобы получить высокое угловое разрешение.
Униполярные и биполярные шаговые двигатели
Вышеупомянутые двигатели могут быть униполярными или биполярными в зависимости от расположения обмоток катушки. Используется униполярный двигатель с двумя обмотками на фазу, и, следовательно, направление тока через эти обмотки изменяет вращение двигателя. В этой конфигурации ток проходит в одном направлении в одной катушке и в противоположном направлении в другой катушке.
На рисунке ниже показан 2-фазный униполярный шаговый двигатель, в котором катушки A и C предназначены для одной фазы, а B и D — для другой фазы. В каждой фазе каждая катушка передает ток в направлении, противоположном направлению тока другой катушки. Только одна катушка будет пропускать ток в каждой фазе для достижения определенного направления вращения. Таким образом, просто переключая клеммы на каждую катушку, можно контролировать направление вращения.
Работа 2-фазного униполярного шагового двигателя
В случае биполярного шагового двигателя каждая фаза состоит из одной обмотки, а не из двух в случае униполярной.При этом направление вращения регулируется путем изменения направления тока через обмотки. Следовательно, для реверсирования тока требуется сложная схема возбуждения.
2-фазный биполярный шаговый двигатель
Тактовые режимы шагового двигателя
Типичное шаговое действие заставляет двигатель шагать через последовательность положений равновесия в ответ на подаваемые на него импульсы тока. Шаговое действие можно изменять по-разному, просто изменяя последовательность подачи питания на обмотки статора.Ниже приведены наиболее распространенные режимы работы или движения шаговых двигателей.
- Шаг волны
- Полный шаг
- Полушаг
- Микрошаг
Режим шага волны
Режим шага волны является самым простым из всех других режимов, в которых только одна обмотка находится под напряжением в любой момент времени. Каждая катушка фазы поочередно подключается к источнику питания. В таблице ниже показан порядок включения катушек в 4-фазном шаговом двигателе.
В этом режиме двигатель дает максимальный угол шага по сравнению со всеми другими режимами. Это самый простой и наиболее часто используемый режим для пошагового выполнения; однако создаваемый крутящий момент меньше, поскольку в данный момент используется некоторая часть всей обмотки.
Режим полного шага
В этом приводе или режиме две фазы статора запитываются одновременно в любой момент времени. Когда две фазы запитаны вместе, ротор будет испытывать крутящий момент от обеих фаз и придет в положение равновесия, которое будет чередоваться между двумя соседними положениями ступенек волны или однофазным возбуждением.Таким образом, этот шаг обеспечивает лучший удерживающий момент, чем волновой шаг. В таблице ниже показан полный шаговый привод для 4-фазного шагового двигателя.
Полушаговый режим
Это комбинация волнового и полушагового режимов. При этом однофазное и двухфазное возбуждение выполняются поочередно, то есть однофазное включение, двухфазное включение и так далее. Угол шага в этом режиме становится половиной от полного угла шага. Этот режим привода имеет самый высокий крутящий момент и стабильность по сравнению со всеми другими режимами.Таблица, содержащая последовательность импульсов фаз для 4-фазного двигателя с полушагом, приведена ниже.
Режим микрошага
В этом режиме каждый шаг двигателя разделен на несколько небольших шагов, даже на сотни фиксированных положений, поэтому достигается большее разрешение позиционирования. При этом токи через обмотки постоянно меняются, чтобы получить очень маленькие шаги. При этом одновременно возбуждаются две фазы, но с разными токами в каждой фазе.
Например, ток через фазу -1 поддерживается постоянным, в то время как ток через фазу 2 увеличивается пошагово до максимального значения тока, будь то отрицательное или положительное. Затем ток в фазе 1 постепенно уменьшается или увеличивается до нуля. Таким образом, двигатель будет производить шаг небольшого размера.
Все эти пошаговые режимы могут быть получены с помощью каждого типа шагового двигателя, описанного выше. Однако направление тока в каждой обмотке во время этих этапов может изменяться в зависимости от типа двигателя, будь то однополярный или биполярный.
Преимущества шагового двигателя
- В состоянии покоя двигатель развивает полный крутящий момент. Неважно, нет ли момента или смены позиции.
- Обладает хорошей реакцией на пуск, остановку и движение задним ходом.
- Поскольку в шаговом двигателе нет контактных щеток, он надежен, а срок службы зависит от подшипников двигателя.
- Угол поворота двигателя прямо пропорционален входным сигналам.
- Это просто и дешевле в управлении, поскольку двигатель обеспечивает управление без обратной связи при ответе на цифровые входные сигналы.
- Скорость двигателя прямо пропорциональна частоте входных импульсов, таким образом можно достичь широкого диапазона скорости вращения.
- Когда нагрузка приложена к валу, все еще возможно реализовать синхронное вращение с низкой скоростью.
- Точное позиционирование и повторяемость движения хороши, так как имеет точность шага 3-5%, при этом ошибка не суммируется от одного шага к другому.
- Шаговые двигатели более безопасны и дешевы (по сравнению с серводвигателями), имеют высокий крутящий момент на низких скоростях, высокую надежность и простую конструкцию, которая работает в любых условиях.
Недостатки шаговых двигателей
- Шаговые двигатели с низким КПД.
- Имеет низкую точность.
- Его крутящий момент очень быстро падает со скоростью.
- Поскольку шаговый двигатель работает в режиме управления без обратной связи, нет обратной связи, указывающей на возможные пропущенные шаги.
- Он имеет низкое отношение крутящего момента к моменту инерции, что означает, что он не может очень быстро разгонять груз.
- Они шумные.
Принцип работы шагового двигателя
— инструменты КИП
Анимация, основы электрооборудования
Шаговые двигатели — это двигатели постоянного тока, которые двигаются дискретными шагами.У них есть несколько катушек, которые организованы в группы, называемые «фазами». Последовательно запитывая каждую фазу, двигатель будет вращаться, шаг за шагом.
Шаговое управление с компьютерным управлением позволяет добиться очень точного позиционирования и / или контроля скорости. По этой причине шаговые двигатели являются предпочтительным выбором для многих приложений точного управления движением.
Работа шагового двигателя
В этом теоретическом разделе мы быстро напомним, как работает шаговый двигатель.Шаговые двигатели работают очень специфическим образом, стандартный шаговый двигатель будет иметь две или более катушек, которые заряжаются и разряжаются, когда через них проходит электричество. Анимация ниже иллюстрирует это.
Когда катушки заряжаются и разряжаются определенным образом (обычно последовательно), это создает электромагнитное притяжение между катушкой и двигателем. Когда это происходит достаточно быстро, шаговый двигатель начинает вращаться, и мы получаем движение, которое вы видите выше.
Преимущества шагового двигателя
- Позиционирование — Поскольку шаговые двигатели перемещаются с точными повторяемыми шагами, они превосходно подходят для приложений, требующих точного позиционирования, таких как 3D-принтеры, ЧПУ, платформы для камер и X, Y-плоттеры.Некоторые дисководы также используют шаговые двигатели для позиционирования головки чтения / записи.
- Контроль скорости — Точные приращения движения также позволяют превосходно контролировать скорость вращения для автоматизации процессов и робототехники.
- Крутящий момент на низкой скорости — Обычные двигатели постоянного тока не имеют большого крутящего момента на низких скоростях. Шаговые двигатели имеют максимальный крутящий момент на низких скоростях, поэтому они являются хорошим выбором для приложений, требующих низкой скорости и высокой точности.
Недостатки шагового двигателя
- Низкий КПД — В отличие от двигателей постоянного тока потребление тока шаговым двигателем не зависит от нагрузки.Они получают самые свежие, когда они вообще не работают. Из-за этого они имеют тенденцию к нагреванию.
- Ограниченный крутящий момент на высокой скорости — Обычно шаговые двигатели имеют меньший крутящий момент на высоких скоростях, чем на низких. Некоторые степперы оптимизированы для повышения быстродействия, но для достижения такой производительности они должны быть соединены с соответствующим драйвером.
- Нет обратной связи — В отличие от серводвигателей, большинство шаговых двигателей не имеют встроенной обратной связи по положению.Хотя можно добиться большой точности, работая в «разомкнутом контуре». Концевые выключатели или «домашние» детекторы обычно требуются для безопасности и / или для установления исходного положения.
Что такое шаговый двигатель и как он работает
От простого DVD-плеера или принтера в вашем доме до сложного станка с ЧПУ или роботизированного манипулятора — шаговые двигатели можно найти почти везде. Его способность выполнять точные движения с электронным управлением позволила этим двигателям найти применение во многих отраслях, таких как камеры наблюдения, жесткие диски, станки с ЧПУ, 3D-принтеры, робототехника, сборочные роботы, лазерные резаки и многое другое.В этой статье мы узнаем, что делает эти двигатели особенными, и что за этим стоит теория. Мы узнаем, как использовать его для вашего приложения.
Введение в шаговые двигатели
Как и все двигатели, шаговые двигатели также имеют статор и ротор , но в отличие от обычного двигателя постоянного тока статор состоит из отдельных наборов катушек. Количество катушек будет отличаться в зависимости от типа шагового двигателя , но пока просто поймите, что в шаговом двигателе ротор состоит из металлических полюсов, и каждый полюс будет притягиваться набором катушек в статоре.На приведенной ниже схеме показан шаговый двигатель с 8 полюсами статора и 6 полюсами ротора.
Если вы посмотрите на катушки на статоре, они расположены в виде пар катушек, например, A и A ’образуют пару, B и B’ образуют пару и так далее. Таким образом, каждая из этой пары катушек образует электромагнит, и они могут получать питание индивидуально с помощью схемы драйвера. Когда на катушку подано напряжение, она действует как магнит, и полюс ротора выравнивается с ним, когда ротор вращается, чтобы выровняться со статором, это называется одной ступенью .Точно так же, последовательно запитывая катушки, мы можем вращать двигатель небольшими шагами, чтобы сделать полный оборот.
Типы шаговых двигателей
В основном существуют три типа шаговых двигателей в зависимости от конструкции, а именно:
- Шаговые двигатели с регулируемым сопротивлением: Они имеют ротор с железным сердечником, который притягивается к полюсам статора и обеспечивает движение за счет минимального сопротивления между статором и ротором.
- Шаговый двигатель с постоянным магнитом: У них есть ротор с постоянными магнитами, и они отталкиваются или притягиваются к статору в соответствии с приложенными импульсами.
- Гибридный синхронный шаговый двигатель: Они представляют собой комбинацию шагового двигателя с переменным сопротивлением и шагового двигателя с постоянным магнитом.
Помимо этого, мы также можем классифицировать шаговые двигатели как униполярные и биполярные в зависимости от типа обмотки статора.
- Биполярный шаговый двигатель: Катушки статора в этом типе двигателя не имеют общего провода. Привод этого типа шагового двигателя отличается и сложен, а схема управления не может быть легко спроектирована без микроконтроллера.
- Униполярный шаговый двигатель: В этом типе шагового двигателя мы можем взять центральное ответвление обеих фазных обмоток на общую землю или на общую мощность, как показано ниже. Это упрощает управление двигателями, также существует много типов униполярных шаговых двигателей
Режимы работы шагового двигателя
Поскольку статор шагового режима состоит из разных пар катушек, каждую пару катушек можно возбуждать множеством различных методов, что позволяет управлять режимами во многих различных режимах.Ниже приведены общие классификации
.
Полный шаг
В режиме полного шага возбуждения мы можем добиться полного вращения на 360 ° с минимальным количеством оборотов (шагов). Но это приводит к меньшей инерции, а также вращение не будет плавным. Есть еще две классификации в режиме полного шага возбуждения, это с пошаговым режимом с одной фазой и двумя фазами .
1. Однофазное пошаговое включение или пошаговое выполнение волны: В этом режиме только одна клемма (фаза) двигателя будет находиться под напряжением в любой момент времени.Это имеет меньшее количество шагов и, следовательно, может обеспечить полное вращение на 360 °. Поскольку количество шагов меньше, ток, потребляемый этим методом, также очень низок. В следующей таблице показана последовательность шагов для 4-фазного шагового двигателя
.
Шаг Фаза 1 Фаза 2 Фаза 3 Фаза 4 1 1 0 0 0 2 0 1 0 0 3 0 0 1 0 4 0 0 0 1 2.Двухфазное включение: Как следует из названия, в этом методе две фазы будут одной. Он имеет то же количество шагов, что и волновой, но поскольку одновременно возбуждаются две катушки, он может обеспечить лучший крутящий момент и скорость по сравнению с предыдущим методом. Хотя с одной стороны, этот метод потребляет больше энергии.
Шаг Фаза 1 Фаза 2 Фаза 3 Фаза 4 1
1
1
0
0
2
0 1 1 0 3 0 0 1 1 4 1 0 0 1 Полушаговый режим
Полушаговый режим представляет собой комбинацию однофазного и двухфазного режимов.Эта комбинация поможет нам преодолеть вышеупомянутый недостаток обоих режимов.
Как вы, возможно, догадались, поскольку мы комбинируем оба метода, нам придется выполнить 8 шагов в этом методе, чтобы получить полное вращение. Последовательность переключения для 4-фазного шагового двигателя показана ниже
Шаг
Фаза 1
Фаза 2
Фаза 3
Этап 4
1
1
0
0
0
2
1
1
0
0
3
0
1
0
0
4
0
1
1
0
5
0
0
1
1
6
0
0
0
1
7
1
0
0
1
8
1
0
0
0
Микрошаговый режим
Микрошаговый режим — это комплекс всего, но он предлагает очень хорошую точность наряду с хорошим крутящим моментом и плавной работой.В этом методе катушка возбуждается двумя синусоидальными волнами, разнесенными на 90 °. Таким образом, мы можем контролировать направление и амплитуду тока, протекающего через катушку, что помогает нам увеличить количество шагов, которые двигатель должен сделать за один полный оборот. Микрошаговый режим может достигать 256 шагов, чтобы сделать одно полное вращение, это заставляет двигатель вращаться быстрее и плавнее.
Как использовать шаговый двигатель
Хватит скучной теории, допустим, кто-то дает вам шаговый двигатель, например, знаменитый 28-BYJ48, и вам действительно интересно, как он работает.К этому времени вы бы поняли, что эти двигатели невозможно заставить вращаться, просто запитав их от источника питания, так как бы вы это сделали?
Давайте взглянем на этот шаговый двигатель 28-BYJ48 .
Хорошо, в отличие от обычного двигателя постоянного тока, из этого выходят пять проводов всех причудливых цветов, и почему это так? Чтобы понять это, мы должны сначала узнать, как работает степпер, о котором мы уже говорили. Во-первых, шаговые двигатели не вращают , они шаговые, поэтому их также называют шаговыми двигателями .Это означает, что они будут двигаться только на один шаг за раз. В этих двигателях присутствует последовательность катушек, и эти катушки должны быть запитаны определенным образом, чтобы двигатель вращался. Когда на каждую катушку подается питание, двигатель делает шаг, и последовательность подачи питания заставляет двигатель делать непрерывные шаги, заставляя его вращаться. Давайте посмотрим на катушки внутри двигателя, чтобы точно знать, откуда берутся эти провода.
Как вы можете видеть, двигатель имеет однополярную 5-проводную катушку .Есть четыре катушки, на которые нужно подавать напряжение в определенной последовательности. На красные провода будет подано + 5 В, а остальные четыре провода будут заземлены для запуска соответствующей катушки. Мы используем любой микроконтроллер, чтобы запитать эти катушки в определенной последовательности и заставить двигатель выполнять необходимое количество шагов. Опять же, есть много последовательностей, которые вы можете использовать, обычно используется 4-шаговый , а для более точного управления также может использоваться 8-шаговый элемент . Таблица последовательности для 4-ступенчатого управления приведена ниже.
Шаг
Катушка под напряжением
Шаг 1
А и В
Шаг 2
B и C
Шаг 3
C и D
Шаг 4
D и A
Итак, почему этот мотор называется 28-BYJ48 ? Шутки в сторону!!! Я не знаю.У этого двигателя нет никаких технических причин для такого названия; Возможно, нам не стоит углубляться в это. Давайте посмотрим на некоторые важные технические данные, полученные из таблицы данных этого двигателя на картинке ниже.
Это голова, полная информации, но нам нужно взглянуть на несколько важных, чтобы знать, какой тип шагового двигателя мы используем, чтобы мы могли его эффективно программировать. Сначала мы знаем, что это шаговый двигатель 5 В, поскольку на красный провод подается напряжение 5 В.Кроме того, мы знаем, что это четырехфазный шаговый двигатель, поскольку в нем было четыре катушки. Теперь передаточное число равно 1:64. Это означает, что вал, который вы видите снаружи, совершит один полный оборот только в том случае, если двигатель внутри вращается 64 раза. Это связано с шестернями, которые соединены между двигателем и выходным валом, эти шестерни помогают увеличить крутящий момент.
Еще одна важная информация, на которую следует обратить внимание, — это угол шага : 5,625 ° / 64. Это означает, что двигатель при работе в 8-ступенчатой последовательности будет двигаться на 5.625 градусов для каждого шага, и потребуется 64 шага (5,625 * 64 = 360), чтобы совершить один полный оборот.
Расчет количества шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов на оборот для вашего шагового двигателя, потому что только тогда вы сможете эффективно программировать / управлять им.
Предположим, мы будем работать с двигателем в 4-х шаговой последовательности, поэтому угол шага будет 11,25 °, так как он составляет 5,625 ° (указано в таблице данных) для 8-шаговой последовательности, то он будет 11.25 ° (5,625 * 2 = 11,25).
Шагов на оборот = 360 / угол шага Здесь 360 / 11,25 = 32 шага на оборот.
Зачем нужны модули драйверов для шаговых двигателей?
Большинство шаговых двигателей работают только с помощью модуля драйвера. Это связано с тем, что модуль контроллера (микроконтроллер / цифровая схема) не сможет обеспечить достаточный ток от своих контактов ввода / вывода для работы двигателя. Поэтому мы будем использовать внешний модуль, например модуль ULN2003 , в качестве драйвера шагового двигателя .Существует много типов модулей драйвера, и номинальные характеристики одного будут меняться в зависимости от типа используемого двигателя. Основным принципом для всех модулей драйвера будет источник / потребление тока, достаточного для работы двигателя. Помимо этого, существуют также модули драйверов, в которых заранее запрограммирована логика, но мы не будем обсуждать это здесь.
Если вам интересно узнать , как вращать шаговый двигатель с помощью микроконтроллера и микросхемы драйвера, то мы рассмотрели много статей о его работе с различными микроконтроллерами:
Теперь я считаю, что у вас достаточно информации, чтобы управлять любым шаговым двигателем, который вам нужен для вашего проекта.Давайте посмотрим на преимущества и недостатки шаговых двигателей.
Преимущества шаговых двигателей
Одним из основных преимуществ шагового двигателя является то, что он имеет отличное управление положением и, следовательно, может использоваться для точного управления. Кроме того, он имеет очень хороший удерживающий момент, что делает его идеальным выбором для робототехники. Считается, что шаговые двигатели имеют более продолжительный срок службы, чем обычные двигатели постоянного тока или серводвигатели.
Недостатки шаговых двигателей
Как и все двигатели, шаговые двигатели также имеют свои недостатки: они вращаются небольшими шагами, поэтому не могут достичь высоких скоростей.Также он потребляет мощность для удержания крутящего момента, даже когда он идеален, что увеличивает потребление энергии.
Как работают шаговые двигатели | Самодельные схемотехнические проекты
В этом посте мы узнаем о шаговом двигателе. Мы будем изучать, что такое шаговый двигатель, его основной рабочий механизм, типы шагового двигателя, режимы шага и, наконец, его преимущества и недостатки.
Что такое шаговый двигатель?
Шаговый двигатель — бесщеточный; его вращающийся вал (ротор) совершает один оборот с определенным количеством шагов.Из-за ступенчатого характера вращения он получил название шагового двигателя.
Шаговый двигатель обеспечивает точное управление углом поворота и скоростью. Это конструкция с открытым контуром, что означает отсутствие механизма обратной связи для отслеживания вращения.
Он может изменять свою скорость, изменять направление вращения и мгновенно фиксироваться в одном положении. Количество ступеней определяется количеством зубьев в роторе. Например: если шаговый двигатель состоит из 200 зубцов, тогда
360 (градус) / 200 (количество зубцов) = 1.8 градусов
Итак, каждый шаг будет составлять 1,8 градуса. Шаговые двигатели управляются микроконтроллерами и схемой драйвера. Он широко используется в лазерных принтерах, 3D-принтерах, оптических приводах, робототехнике и т. Д.
Основной рабочий механизм:
Шаговый двигатель может состоять из нескольких полюсов, намотанных изолированной медной проволокой, называемой статором или неподвижной частью двигателя. мотор. Подвижная часть двигателя называется ротором, который состоит из нескольких зубцов.
Когда один полюс находится под напряжением, ближайшие зубцы будут совмещены с этим полюсом, находящимся под напряжением, а другой зубец на роторе будет немного смещен или не совмещен с другими полюсами, не находящимися под напряжением.
На следующий полюс будет подано напряжение, а на предыдущий полюс будет отключено питание, теперь невыровненные полюса будут выровнены с полюсом, находящимся под напряжением в данный момент, это сделает один шаг.
Следующий полюс получает питание, а предыдущий полюс обесточивается, это делает следующий шаг, и этот цикл продолжается несколько раз, чтобы сделать один полный оборот.
Вот еще один очень простой пример того, как работает шаговый двигатель:
Обычно зубья ротора представляют собой магниты, расположенные с чередованием северного и южного полюсов. Подобно тому, как полюса отталкиваются и в отличие от притяжения полюсов, теперь обмотка полюса «A» находится под напряжением и принимает под напряжением полюс как северный полюс, а ротор как южный полюс, это притягивает южный полюс ротора к полюсу статора «A», как показано на рисунке.
Теперь полюс A обесточен, а на полюс «B» подано напряжение, теперь южный полюс ротора будет совмещен с полюсом «B».Аналогичные полюс «C» и полюс «D» будут включать и отключать питание одинаковым образом, чтобы завершить один оборот.
Теперь вы понимаете, как работает механизм шагового двигателя.
Типы шаговых двигателей:
Существует три типа шаговых двигателей:
• Шаговый двигатель с постоянным магнитом
• Шаговый двигатель с регулируемым сопротивлением
• Гибридный синхронный шаговый двигательШаговый двигатель с постоянным магнитом:
Шаговый двигатель с постоянным магнитом использует постоянный магнит зубья в роторе, расположенные с чередованием полюсов (Север-Юг-Север-Юг ……), это обеспечивает больший крутящий момент.
Шаговый двигатель с переменным сопротивлением:
В шаговом двигателе с переменным сопротивлением в качестве ротора используется материал из мягкого железа с несколькими зубцами, и он работает по принципу минимального сопротивления реактивного сопротивления при минимальном зазоре, что означает, что ближайшие зубья ротора притягиваются к полюсу, когда он заряжен, как металл притягивается к магниту.
Гибридный синхронный шаговый двигатель:
В гибридном шаговом двигателе оба вышеупомянутых метода комбинируются для получения максимального крутящего момента.Это наиболее распространенный тип шаговых двигателей, а также дорогостоящий метод.
Пошаговые режимы:Есть 3 типа пошаговых режимов
• Полный тактовый режим
• Полушаговый режим
• Микрошаговый режимПолный пошаговый режим:
Полношаговый режим можно понять на следующем примере: если у шагового двигателя 200 зубцов, то один полный шаг составляет 1,8 градуса (который указан в начале статьи), он не будет вращаться меньше или больше чем на 1,8 градуса.
Полный шаг далее подразделяется на два типа:
• Однофазный режим
• Двухфазный режимВ обоих фазных режимах ротор выполняет один полный шаг, основное различие между этими двумя состоит в том, что одиночный режим дает меньший крутящий момент и двухфазный режим дают больший крутящий момент.
• Однофазный режим:
В однофазном режиме только одна фаза (группа обмоток / полюсов) находится под напряжением в данный момент времени, это наименее энергоемкий метод, но он также дает меньший крутящий момент.
• Двухфазный режим:
В двухфазном режиме на две фазы (две группы обмоток / полюс) подается питание в заданное время; он производит больший крутящий момент (от 30% до 40%) в однофазном режиме.
Полушаговый режим:
Полушаговый режим используется для удвоения разрешения двигателя. Полушаг, как следует из названия, занимает половину одного полного шага, вместо полных 1,8 градуса, полушага занимает 0,9 градуса.
Полушаг достигается за счет попеременного изменения однофазного режима и двухфазного режима.Это снижает нагрузку на механические части и увеличивает плавность вращения. Полушаг снижает крутящий момент примерно на 15%. Но крутящий момент можно увеличить, увеличив ток, подаваемый на двигатель.Микрошаговый режим:
Микрошаговый режим выполняется для наиболее плавного вращения. Один полный шаг делится на 256 шагов. Для микрошага нужен специальный контроллер микрошага. Его крутящий момент составляет примерно 30%.
Драйверы должны вводить синусоидальную волну для вращения жидкости.Драйверы дают два синусоидальных входа с фазой на 90 градусов.
Обеспечивает наилучший контроль вращения, значительно снижает механическое напряжение и снижает рабочий шум.
Основные преимущества и недостатки шагового двигателя можно узнать из следующих пунктов:
Преимущества:
• Лучший контроль углового вращения.
• Высокий крутящий момент при низкой скорости.
• Мгновенное изменение направления вращения.
• Минимальная механическая конструкция.Недостатки:
• Энергия потребляется даже при отсутствии вращения; это сделано для фиксации ротора в фиксированном положении.
• Нет механизма обратной связи для исправления ошибок вращения и отслеживания текущего положения.
• Требуется сложная схема драйвера.