
Схема управления асинхронным двигателем с короткозамкнутым ротором. Схема пуска асинхронного двигателя
Схема управления электродвигателем
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.
Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель — аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор.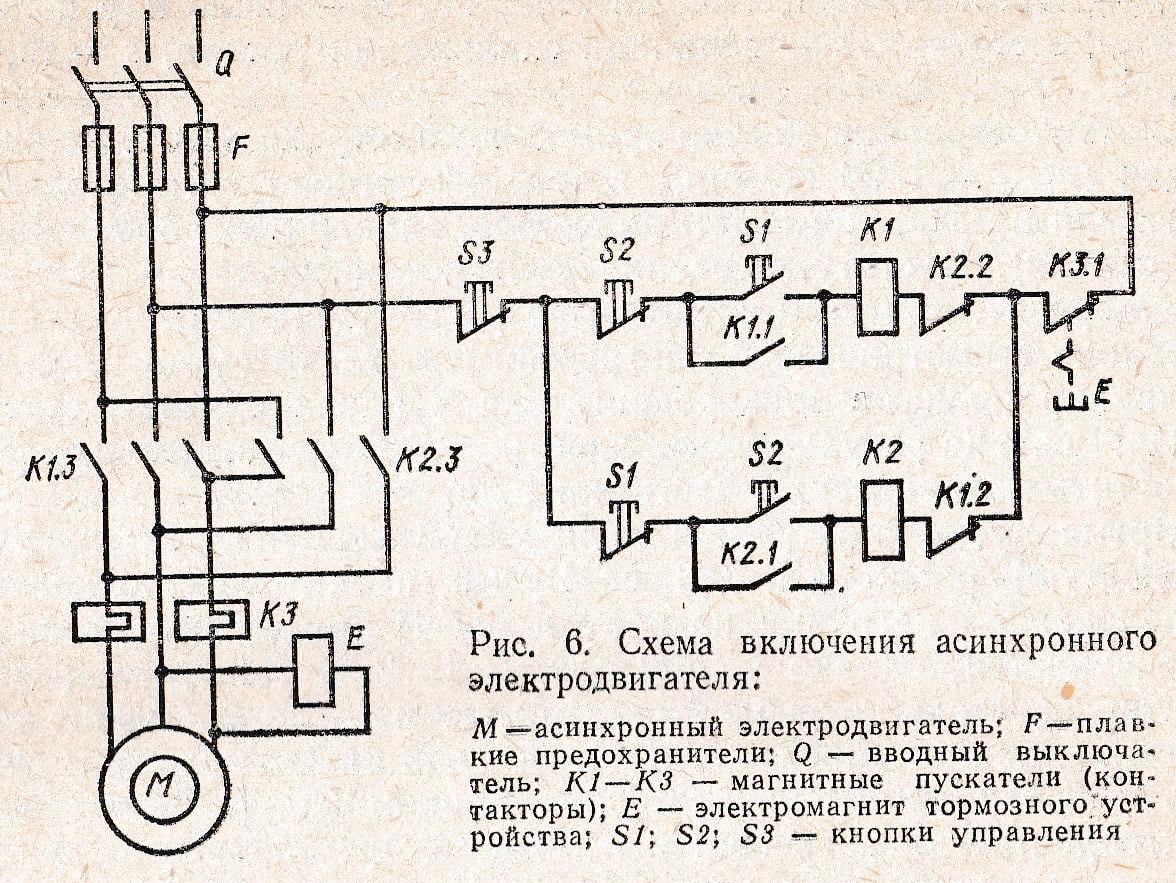 От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора — неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора — неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле.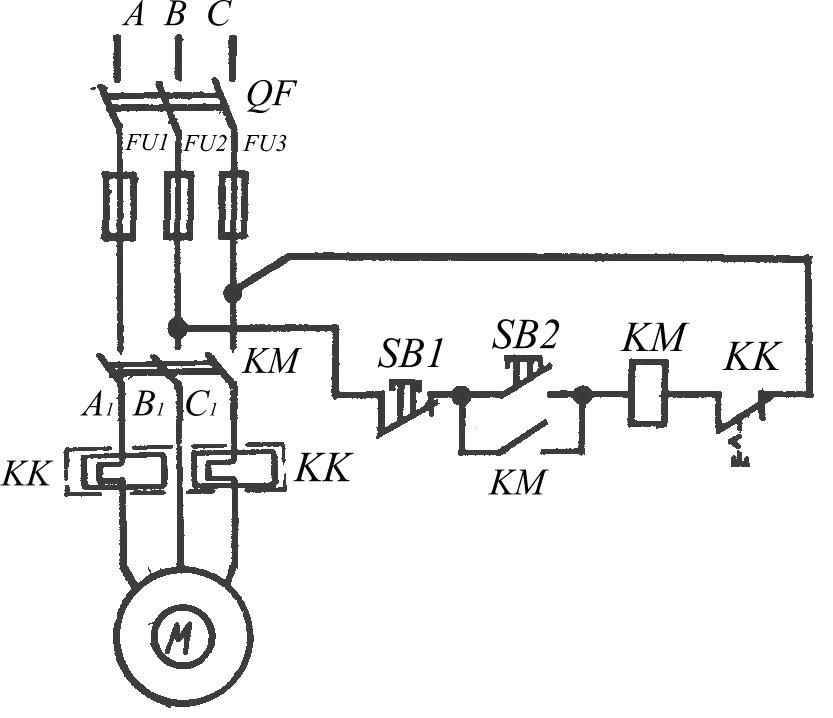 Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока.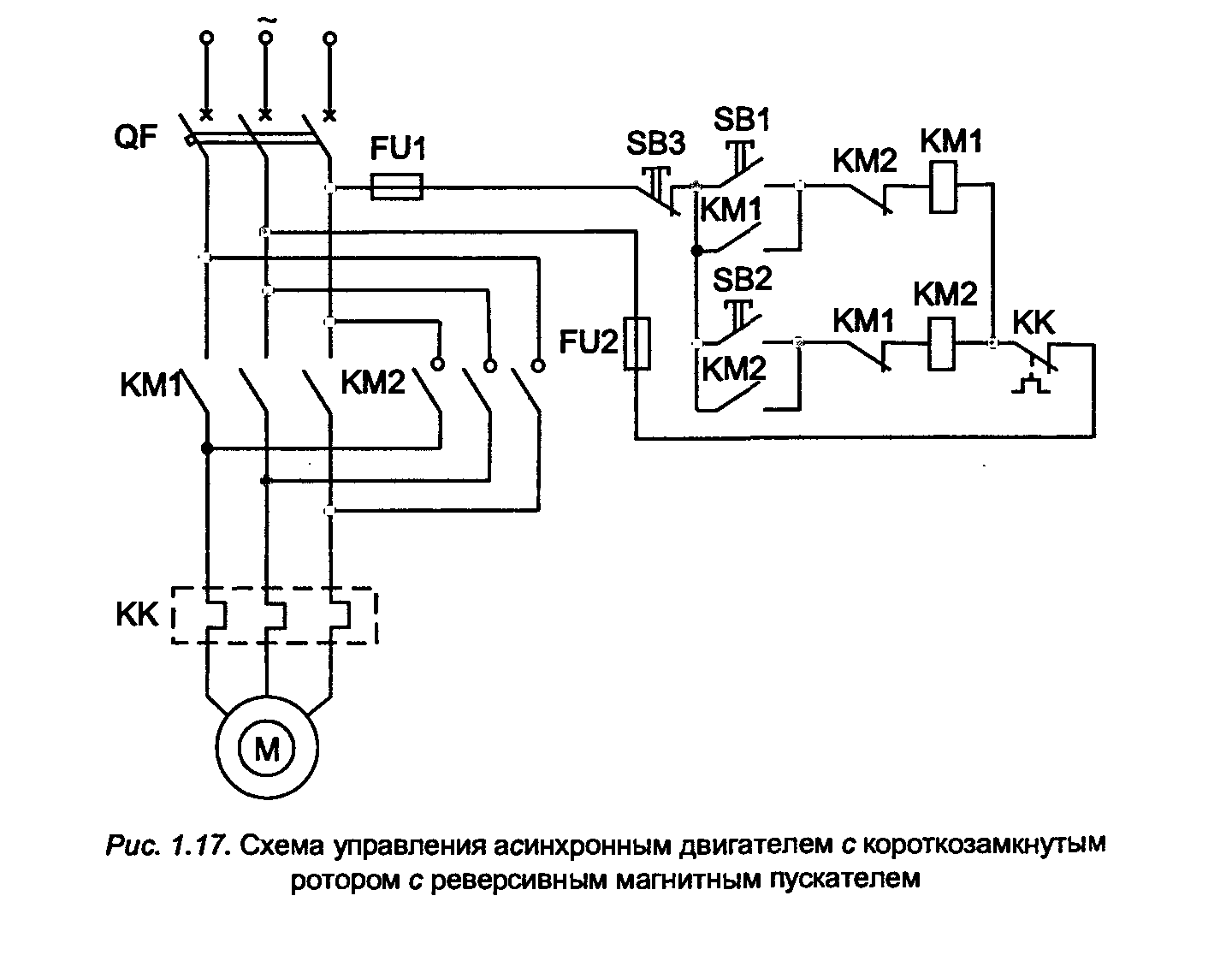 Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение. Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
Основные элементы схемы и их назначение
Автоматический выключатель
— аппарат для нечастой ручной коммутации электрических цепей и автоматической защиты их при коротких замыканиях и длительной перегрузке. Назначение автоматического выключателя, применённого в схеме, описано в таблице 1.
Таблица1. Область применения автоматического выключателя.
Как видно из таблицы 1 автомат не отключается при резком снижении напряжения, так как расцепитель минимального напряжения в применяемом автоматическом выключателе отсутствует. Защиту при значительном снижении или исчезновении напряжения питающей сети осуществляет магнитный пускатель.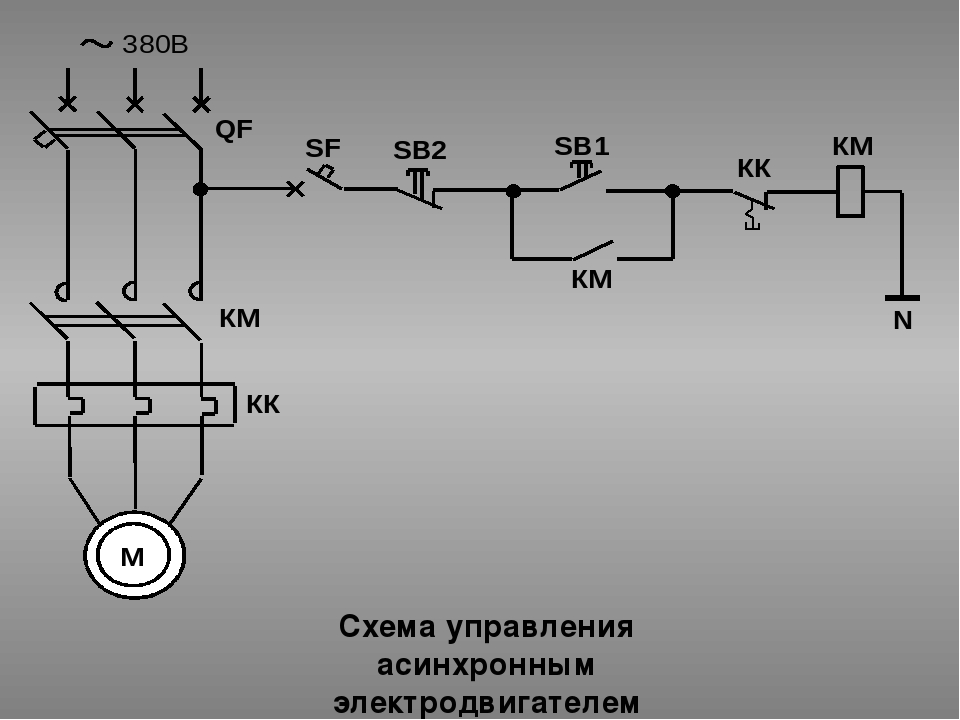
Автоматы используют при напряжении до 660В на номинальные токи от 15 до 600А, в помещениях с нормальной окружающей средой, так как они не приспособлены для работы в средах с едкими парами и газами, во взрывоопасных и незащищённых от попадания воды местах. Автоматы необходимо не реже 1 раза в год осматривать, чистить, смазывать шарнирные механизмы приборным маслом. Для своей схемы я выбрал автоматический выключатель серии АП-50. Внешний вид автомата показан на рисунке 3.
1- кнопка выключения, 2-кнопка включения, 3- реле, 4-искрогасительные камеры, 5-пластмассовый кожух
Рис3. Внешний вид и устройство автомата АП-50.
Он предназначен для защиты от перегрузок и токов короткого замыкания при U питающей сети до 500В, 50 гц на переменном токе, для ручного включения и отключения цепей, а главное для пуска и защиты трёхфазных асинхронных двигателей с короткозамкнутым ротором. Выключатель защищён пластмассовым кожухом. Наличие буквы Б в серии АП-50Б означает универсальное исполнение, при котором ввод и вывод проводов снизу и сверху через сальники типа СКВрт-33.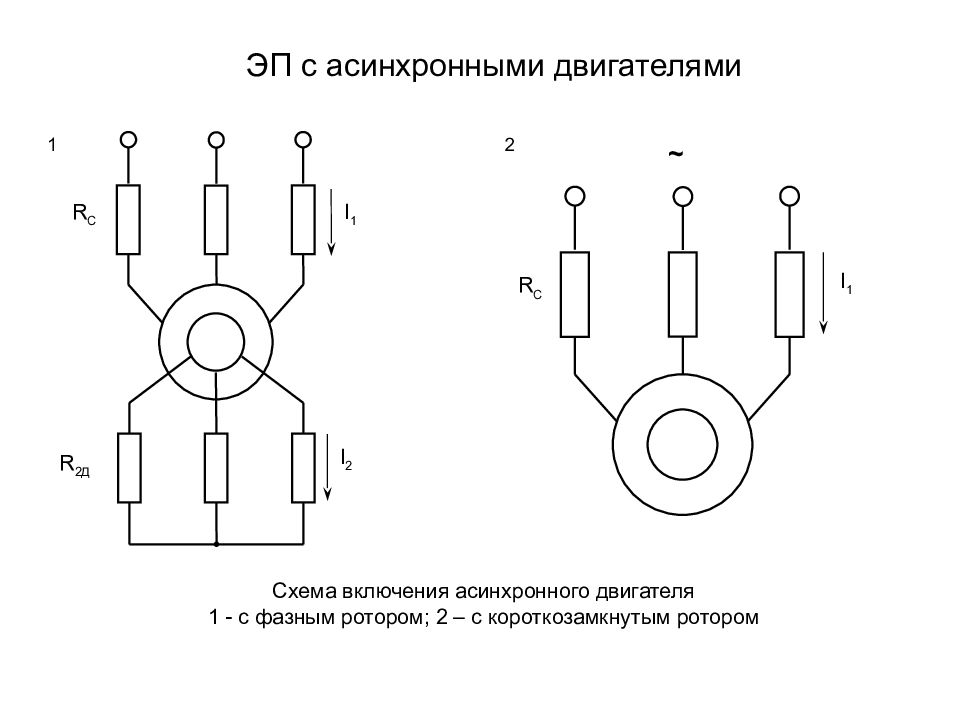 Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Магнитный пускатель
— коммутационный аппарат дистанционного управления, для частых включений и отключений электрооборудования, которым управляют с помощью отдельно расположенной кнопки. Это устройство для пуска, остановки и защиты электродвигателей. Назначение магнитного пускателя, применённого в схеме, представлено в таблице 2.
Типовые схемы управления электроприводов
с АД
АД с короткозамкнутым ротором малой и средней мощности пускаются прямым подключением к сети без ограничения пусковых токов. Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
Реверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
Рис. 8.9. Реверсивная схема управления АД
с короткозамкнутым ротором
Основным элементом
этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактораКМ1 и КМ2 и два тепловых реле защиты КК.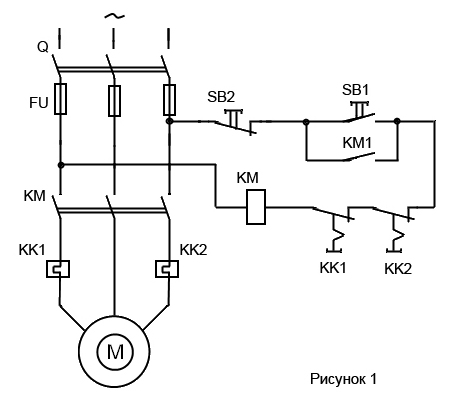 Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2).
Пуск двигателя
при включенном автоматическом выключателе QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения
двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае
необходимости только торможения
двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания
в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени, приведена на рис. 8.10.
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя
осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Для остановки двигателя
нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.
Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя
производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения R
д2
, а также разрывает цепь катушки реле времени КТ.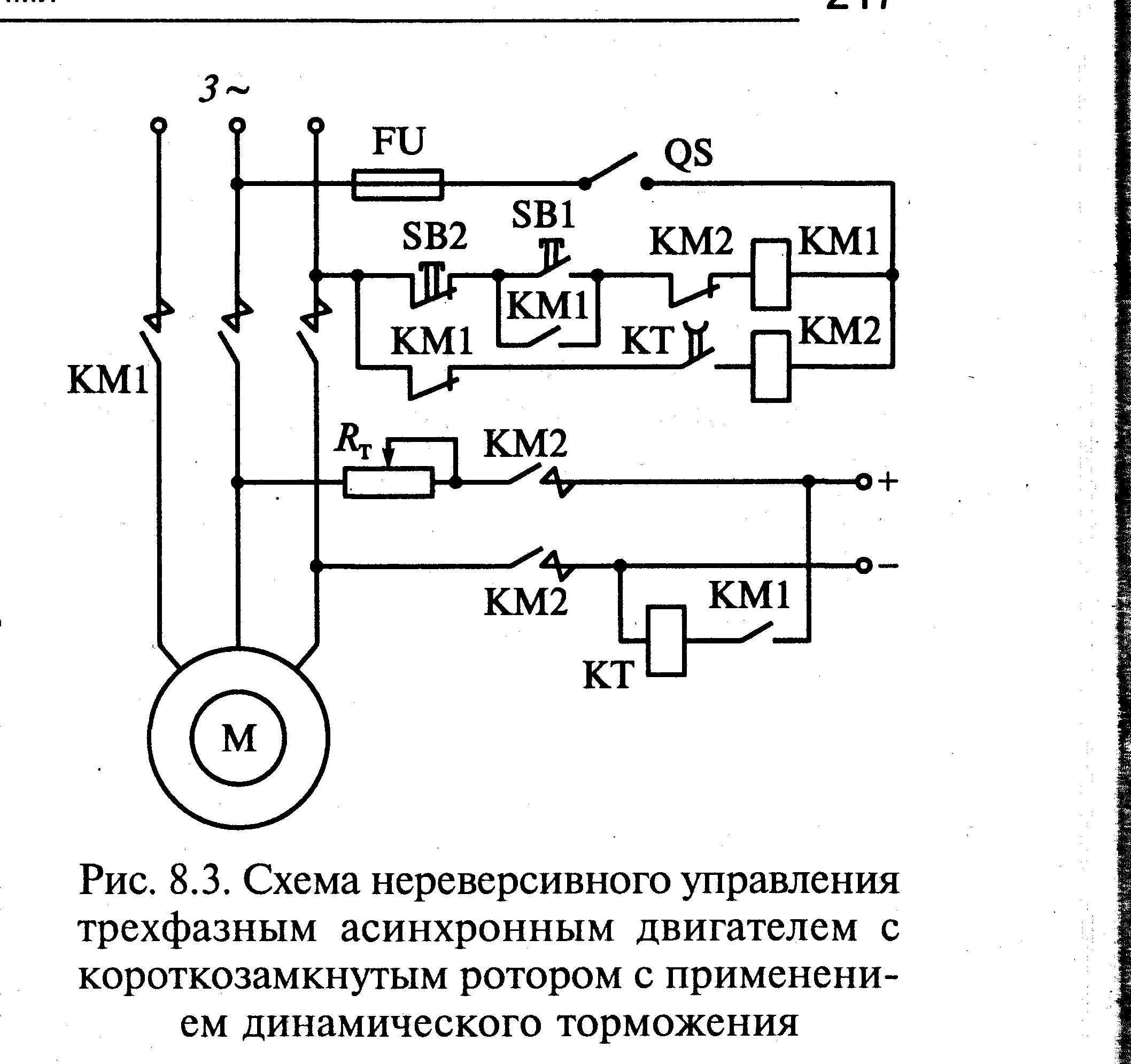 Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
д1
в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением
обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора R
р
оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0
Для осуществления торможения
двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4, и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление R
д1
+ R
д2
.
Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре.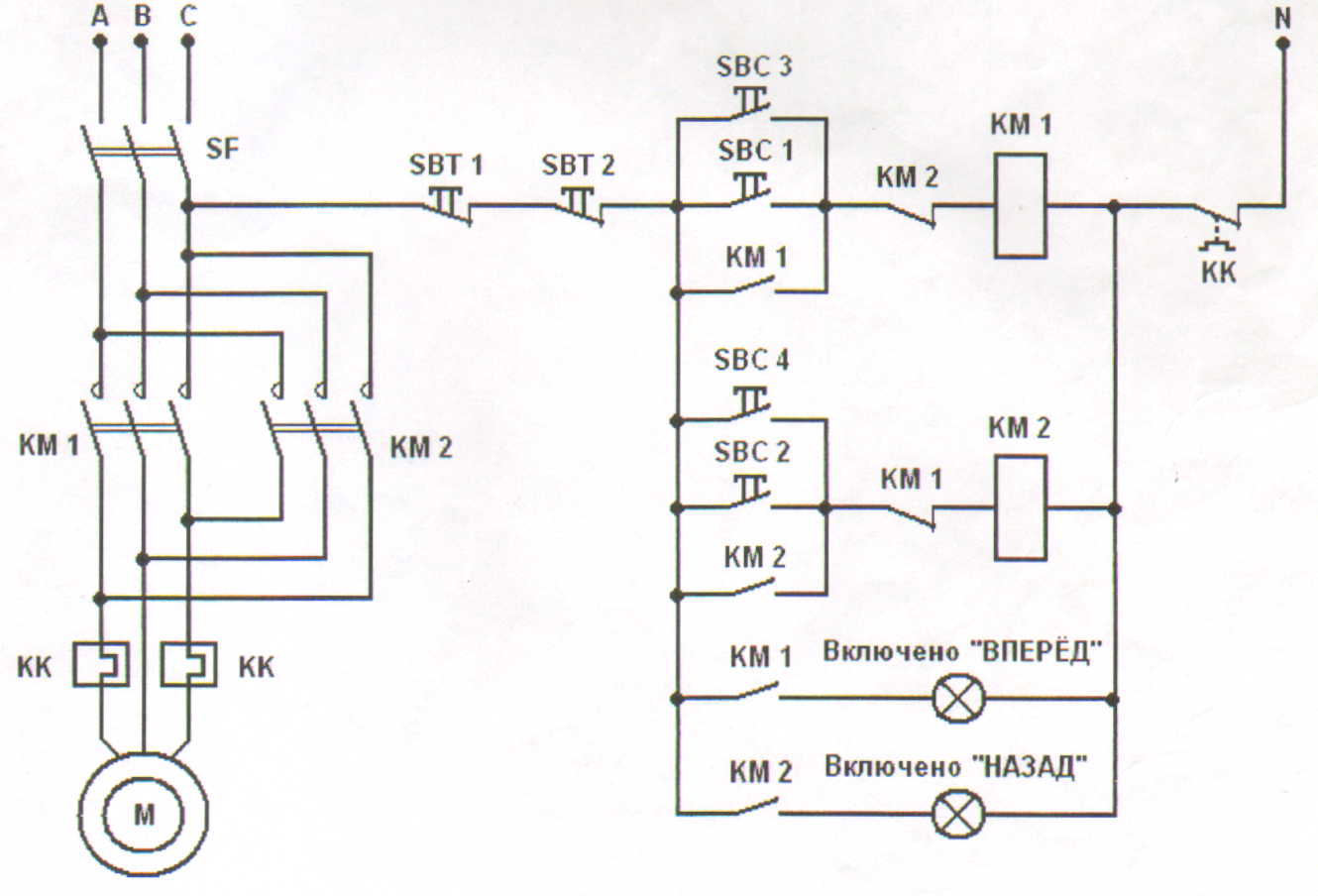 Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное положение. После отключения КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220
входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS
1
и QS
2
и автомата QF) включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора.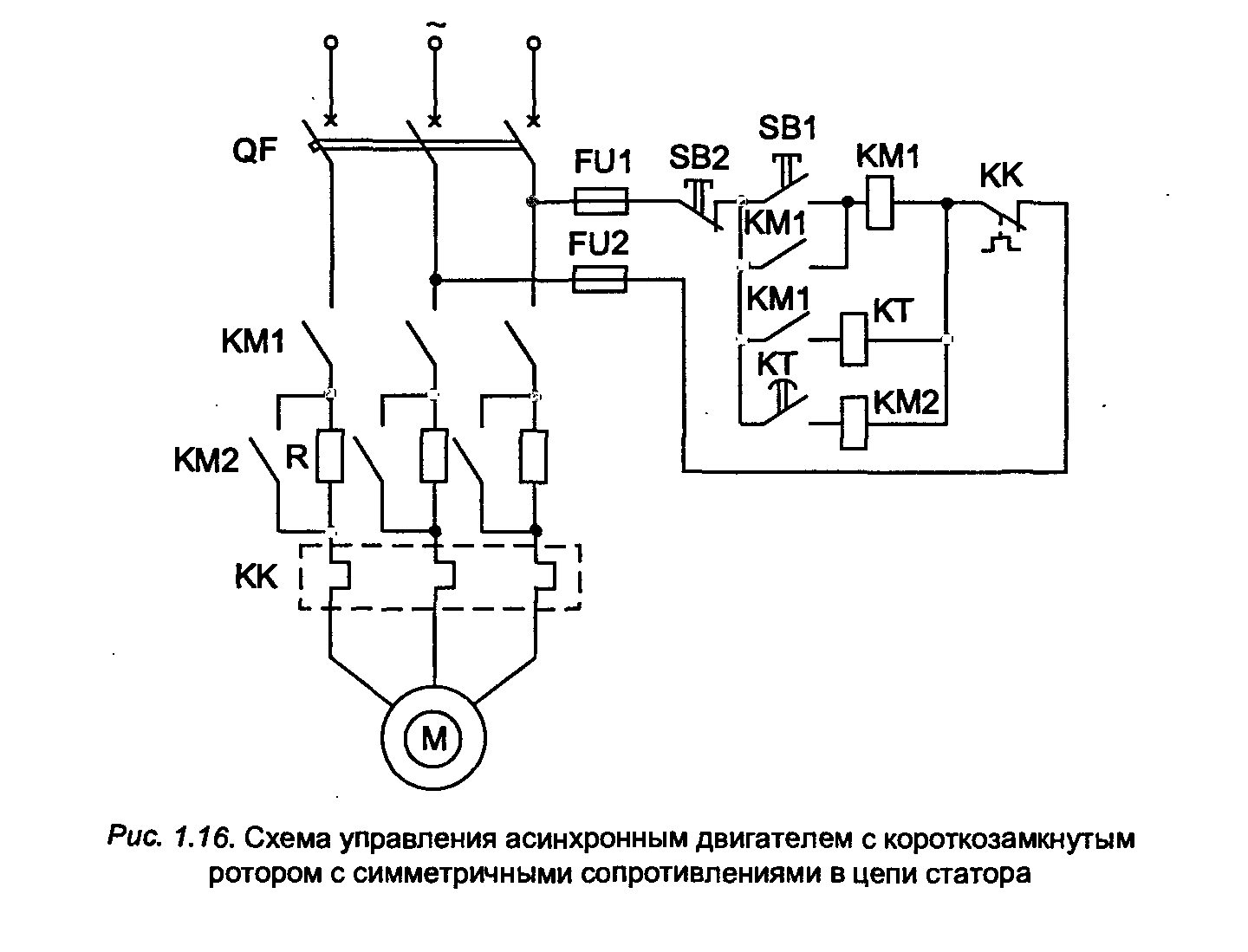 Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя
осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя
происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
к ак
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является
регулирование напряжения
на его статоре
с помощью тиристорных пусковых устройств (ТПУ).
Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается
между источником питания (сетью переменного тока) с напряжением U
1
и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами.
Напряжение при пуске может изменяться по различным законам
– линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
1д
в цепь статора
применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω
0
при включении R
1д
не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис. 8.15 а).
8.15 а).
а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R
1д
= 0, причем большему значению R
1д
соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума М
к
и S
к
изменяются при варьировании R
1д
, а именно: в соответствии с (8.15) и (8.16) при увеличении R
1д
критический момент М
к
и критическое скольжение S
к
уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения
R
1д
снижается; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
Включение добавочных резисторов R
2д
в цепь ротора
применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R
2д
= var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения) пускового тока I
кз
= I
п
.
Скорость идеального холостого хода АД ω
0
и максимальный (критический) момент двигателя М
к
в соответствии с остаются неизменными при регулировании R
2д
, а критическое скольжение S
к
, как это следует из , изменяется.
Выполненный анализ позволяет построить естественную 1 (R
2д
= 0) и искусственные 2–3 (R
2д3
> R
2д2
) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R
2д
имеется возможность повышать пусковой момент АД вплоть до критического момента М
к
без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.
Рис. 8.16. Механические характеристики при различных сопротивлениях R
2д
добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R
2д
.
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые
резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях. Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R
2д
может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R
2д1
) можно определить по выражению :
, (8.30)
где
– сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту М
ном
, и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R
2д1
определяется как
R
2д1
= R
2ном
аb/ас, (8.31)
где
–
номинальное сопротивление АД;
–
ЭДС ротора при S = 1;
–
номинальный ток ротора.
http://life-prog. ru/1_17774_tormoznie-rezhimi-ad.html
ru/1_17774_tormoznie-rezhimi-ad.html
15.09.2014
Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока, двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором.
Схема использует питание силовых цепей и цепей управления от источника одного и того же напряжения (рис. 4.9). Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Если рубильник S1 включен, то для пуска электродвигателя необходимо нажать на кнопку S2 («пуск»). При этом катушка контактора K1M получит питание, замкнутся главные контакты К1(1-3)М в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начнет вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт K1A, шунтирующий кнопку S2 («пуск»), после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора KlM остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 («стоп»). Катушка контактора K1M обесточивается и замыкающие контакты K1(1-3)M отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт K1A. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F 1(1-3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1-2). Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя.
Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей (рис. 4. 10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепителями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания, Электротепловые расцепители обладают обратнозависимой характеристикой времени от тока. Так, расцепитель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной — через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20 — 30%, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем. Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем.
Эта схема применяется в случаях, когда необходимо изменять направления вращения электропривода (рис. 4.11), например в приводе электролебедок, рольгангов, механизмов подачи станков и т.д. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора K1M будет под напряжением, и замыкающие главные контакты К1(1-3)M присоединят электродвигатель к сети. Для переключения электродвигателя необходимо нажать на кнопку S3 («стоп»), а затем на кнопку S2 («назад»), что вызовет отключение контактора K1M и включение контактора К2М. При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Ho для устранения возможности короткого замыкания между первой и третьей фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором.
Такая схема приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ с замыканием трех силовых контактов К3. Одновременно замыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и размыкается К3А — вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора К3 обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и замыкается вспомогательный контакт К3А в цепи катушки К4.
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замыкаются пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замыкается вспомогательный контакт К4А, шунтирующий кнопку S4 и размыкается вспомогательный контакт К4А в цепи катушки контактора К3. Обычно контакторы переменного тока имеют три силовых контакта, в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов K1 и К2 для вращения вперед или назад. Включение контакторов K1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя вперед или назад без нажатия кнопки S5 («стоп»). При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием торможения противовключением.
Такая схема изображена на рис. 4.13. В схемах торможения противовключением используется реле контроля скорости (PKC) ЕМ, механически связанное с валом двигателя; его замыкающий контакт EA при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются силовые контакты К1(1-3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт K1A.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2. При этом двигатель вращается по инерции и контакт реле EA замкнут, следовательно, катушка контактора К2А получит питание, замкнутся главные контакты К2(1-3)М, разомкнется вспомогательный контакт К2А в цепи катушки K1M. Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Рассмотренная типовая схема торможения противовключением является основой построения схем управления электродвигателями станков заточки цепных, круглых, рамных пил, схем обрезных станков и др. Торможение противовключением обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма.
Такая схема представлена на рис. 4.14. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Tс пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 («пуск»), катушка контактора K1M будет под напряжением, замкнутся три контакта К1(1-3)М в силовой цепи и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Электромагнит Y одновременно отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 («стоп») обесточивается катушка контактора K1M, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз с пружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.
Схема фрикционного торможения асинхронного электродвигателя станочного оборудования.
Такая схема показана на рис. 4.15. В нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1(1-3)М. Остановка электропривода станка производится нажатием двухцепной кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1-2)М, электромагнит Y затягивает колодочный тормоз. Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2(1-2)М размыкаются. Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения.
Такая схема приведена на рис. 4.16. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки SI («пуск»). Контактор K1M будет включен, замкнутся три главных контакта К1(1-3)М в силовой цепи, замкнется вспомогательный контакт K1А.1, разомкнется контакт К1А.2, замкнется контакт К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 («стоп»). Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя
где Mн — номинальный момент двигателя; nс — синхронная скорость двигателя; I»р — приведенный к статору ток ротора; R»р — полное активное сопротивление ротора, приведенное к статору; nд — относительная скорость двигателя, nд = n/nс.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором.
Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя.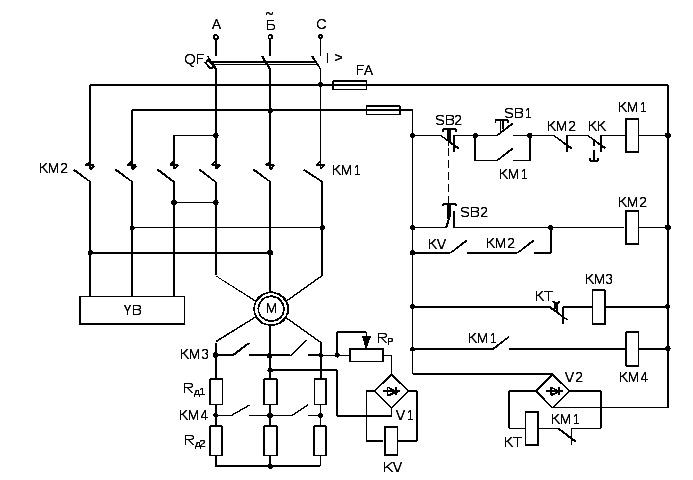 Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1…VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В — V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1…VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1…VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6.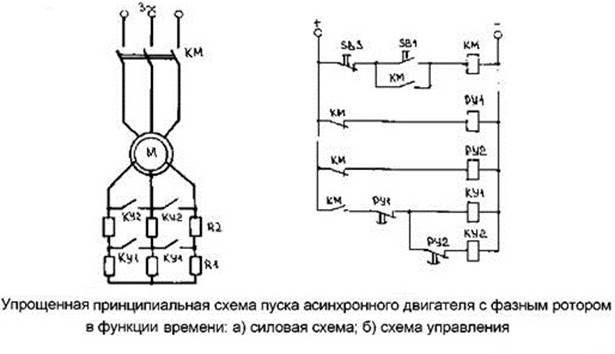 2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени.
Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4(1-2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.
При последующем нажатии кнопки S2 («пуск») через замкнувшийся ранее контакт Д1А.2 включится контактор K1M, замкнутся главные контакты К1(1-3) M в силовой цепи, в обмотку статора двигателя M будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт K1A.3, шунтирующий пусковую кнопку, и замкнется контакт K1A.2, через который подается питание в цепь катушек реле времени Д2М, Д3М. Размыкающий вспомогательный контакт K1A.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. 1 будет открыт.
1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З — закроется. В результате этих переключений в схеме управления включится контактор К2М и будет шунтирована первая пусковая ступень резистора — двигатель с первой реостатной характеристики перейдет на вторую, разогнавшись до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора К3М, который сработает и замкнет свои контакты К3(1-2)М, т.е. шунтируется вторая пусковая ступень резистора — двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле Д3М — с выдержкой времени, на которое настроено реле Д3М (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт Д3А. 1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения.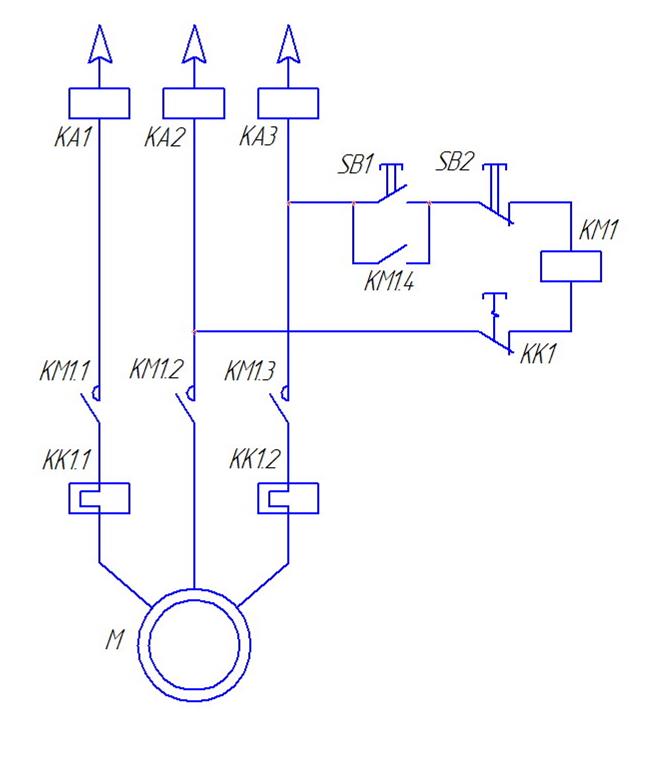 Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой — при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.
Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т. е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).
Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис. 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.
Рис.5.7. Схема последовательного включения двигателей
Пример 5.1.
Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Рис. 5.8 К примеру 5.1
Пример 5.2.
В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис.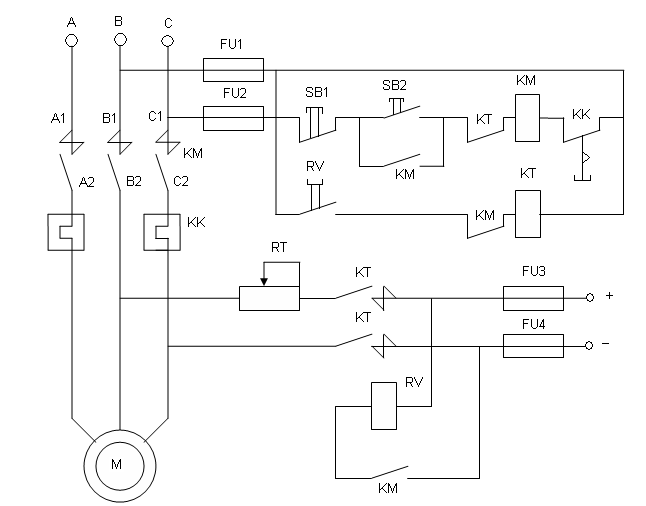 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
Рис. 5.9 К примеру 5.2
ВАЖНО!
Перед подключением электродвигателя необходимо убедится в правильности в соответствии с его .
Условные обозначения на схемах
(далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты
предназначенные для коммутации цепей под нагрузкой и блок-контакты
которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые
— контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые
— которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке ), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.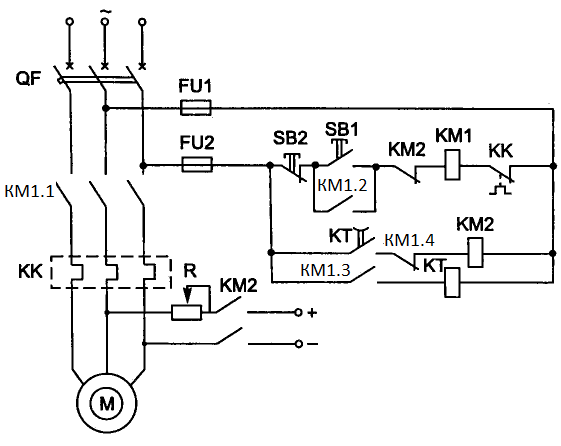 д.
д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя
, в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
Реверсивная схема подключения электродвигателя (Как изменить направление вращения электродвигателя?)
Что бы поменять направление вращения трехфазного электродвигателя необходимо поменять местами любые две питающие его фазы:
При необходимости частой смены направления вращения электродвигателя применяется :
В данной схеме применяется два магнитных пускателя (KM-1, KM-2) и трехкнопочный пост, магнитные поскатели применяемые в данной схеме кроме нормально-разомкнутого блок-контакта должны так же иметь и нормально замкнутый контакт.
При нажатии кнопки SB-2 (кнопка «ПУСК 1») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1 который шунтирует кнопку SB-2 и размыкает свой блок-контакт KM-1.2 который защищает электродвигатель от включения в обратную сторону (при нажатии кнопки SB-3) до его предварительной остановки, т.к. попытка запуска электродвигателя в обратную сторону без предварительного отключения пускателя KM-1 приведет к короткому замыканию. Что бы запустить электродвигатель в обратную сторону необходимо нажать кнопу «СТОП» (SB-1), а затем кнопку «ПУСК 2» (SB-3) которая запитает катушку магнитного пускателя KM-2 и запустит электродвигатель в обратную сторону.
10
Сборка и проверка схемы шкафа для реверсивного управления асинхронным двигателем с помощью кнопочного поста и микропроцессорного монитора тока
Цель работы:
ознакомление с принципиальной схемой установки;
приобретение практических навыков при проведении монтажных работ;
предоставление обоснованных выводов по проведенной работе.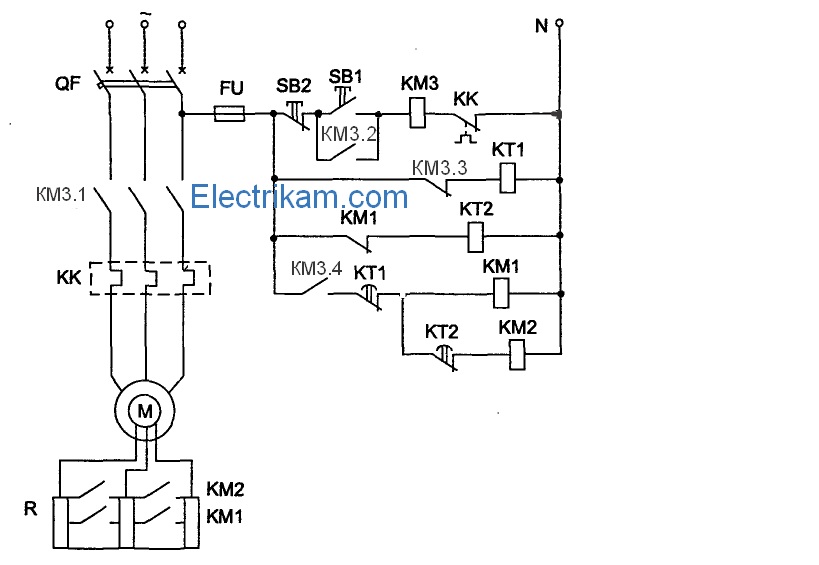
Перечень аппаратуры
Обозначение | Наименование | Параметры |
M1 | Асинхронный двигатель с короткозамкнутым ротором | 120Вт / ~ 380В / 1500 мин — 1 |
QF1 | Автоматический трехполюсный выключатель | ~ 380В / 10А |
SF1 | Автоматический однополюсный выключатель | ~ 230В / 0,5А |
KM1, KM2 | Контактор | ~ 380В / 10А |
А1…А3 | Датчик тока | 0…2,5А |
А4 | Микропроцессорный монитор тока двигателя | ~ 380В / 2,5А |
SB1…SB2 | Кнопка | ~ 380В / 10А |
HLR1, HLR2, HLG1 | Лампа индикаторная | ~ 220В |
PV1 | Вольтметр | ~ 0…500В |
PA1 | Амперметр | ~ 0…2В |
Указания по проведению эксперимента
• Обеспечьте, чтобы шкаф управления асинхронным двигателем (далее шкаф) был заперт и отключен от сети электропитания лаборатории внешним коммутационным аппаратом, например, автоматическим выключателем.
• Откройте дверь шкафа.
• Если включены выключатели QF1 и SF1, то отключите их.
• Соедините аппаратуру в соответствии со схемой электрической принципиальной. Для соединения аппаратуры, установлен49
Схема электрическая принципиальная
Рис. 16
Контрольные вопросы
1.С помощью чего осуществляется крепление фундаментной плиты к основанию (фундаменту)?
2.Перечислите последовательность монтажных работ при установке машин большой мощности.
3.Для чего устанавливаются изоляционные прокладки под стояками подшипников?
4.Объясните понятия «центровка» и «балансировка».
48
U − U
⎛ U ⎞
откуда R
= R 1 2 = R
⎜ 1 −1⎟10 − 6 МОм
из в U 2
в ⎜ U ⎟
⎝ 2 ⎠
Маркировка концов обмотки статора трехфазных асинхронных эл. двигателей по ГОСТ 183-74 и ГОСТ 26772-85 приведены в таблице 4.
Таблица 4. Маркировка концов обмоток статора трехфазных асинхронных двигателей
Маркировка концов обмоток статора трехфазных асинхронных двигателей
Схема соединений обмотки | Число выводов | Обозначение вывода | |||
ГОСТ 183-74 | ГОСТ26772-85 | ||||
начало | конец | начало | конец | ||
Открытая схема | 6 | С1 С2 С3 | С4 С5 С6 | U1 V1 W1 | U2 V2 W2 |
Соединение звездой | 3 или 4 | С1 С2 С3 0 | — | U V W N | |
Соединение треугольником | 3 | С1 С2 С3 | — | U V W |
Обозначения выводов обмоток электрических машин наносят непосредственно на кабельных наконечниках, на шинных концах и т. д. В малых электрических машинах, где буквенные обозначения выводов наносить трудно, применяют обозначение выводов приведены в таблице №5.
д. В малых электрических машинах, где буквенные обозначения выводов наносить трудно, применяют обозначение выводов приведены в таблице №5.
Таблица 5. Цвет проводов выводов для трехфазных асинхронных машин
Схема соединения обмотки | Число выводов | Вид вывода | Цвет вывода | |
Начало | Конец | |||
Открытая схема | 6 | 1я фаза 2я фаза 3я фаза | Желтый Зеленый Красный | Желтый с черным Зеленый с черным Красный с черным |
9
Продолжение таблицы 5. Цвет проводов выводов для трехфазных асинхронных машин
Соединение звездой | 3 или 4 | 1я фаза 2я фаза | Желтый Зеленый | — |
3я фаза Нулевая точка | Красный Черный | — | ||
Соединение треугольником | 3 | Первый вывод Второй вывод Третий вывод | Желтый Зеленый Красный | — |
При отсутствии обозначений вывод обмоток или при их неправильном соединении и обозначении начала и концы обмоток могут быть определены индукционным методом по схемам рисунок 3.
а) б) в)
Рис. 3. Определение неправильных соединений в обмотке трехфазного статора: а ,б – на постоянном токе; в) – на переменном токе
В одну из фаз обмотки рис. 3, а и б включается источник постоянного или переменного тока, реостат RR, кнопка SB. Две другие обмотки соединяются последовательно и к ним подключается милливольтметр.
Если оказалось, что обмотки соединены разноименными выводами (начало 1 с концом 2 или конец 1 с началом 2 рис. 3, а), то при замыкании и размыкании кнопки SB индукционные токи вызовут резкие отклонения стрелки милливольтметра.
Если же обмотки соединены одноименными выводами
(начало 1 с началом 2 или конец 1 с концом 2) (рис.б), то при
10
« » на мониторе А4.
• Смоделируйте обрыв фазы двигателя M1 выниманием перемычки, например, в фазе «В» на его терминальной панели.
Стрелки вольтметра PV1 и амперметра РА1 укажут напряжение
и увеличившийся ток двигателя Ml. На мониторе А4 высветится
На мониторе А4 высветится
увеличенное в 100 раз текущее значение тока двигателя Ml в
выбранной фазе. Двигатель Ml начнет издавать характерный гудящий звук. Через время t3 = 5 с двигатель Ml должен аварийно отключиться от электрической сети и остановиться. Об этом будет сигнализировать надпись «OL3», которая должна появиться на мониторе блока А4.
• Устраните искусственно созданный обрыв фазы «В» двигателя
Ml.
• Отключите шкаф от сети электропитания лаборатории.
• Откройте дверь шкафа.
• Отключите выключатели QF1 и SF1.
• Создайте механический момент сопротивления на валу двигателя M1, исключающий его пуск. Для этого снимите кожух,
защищающий от прикосновения к валу двигателя Ml. Закрепите
на валу двигателя стопорное устройство гак, чтобы исключалось
вращение вала в обе стороны.
• Включите выключатели QF1 и SF1.
• Закройте дверь шкафа ключом.
• Подайте на шкаф электропитание от сети лаборатории.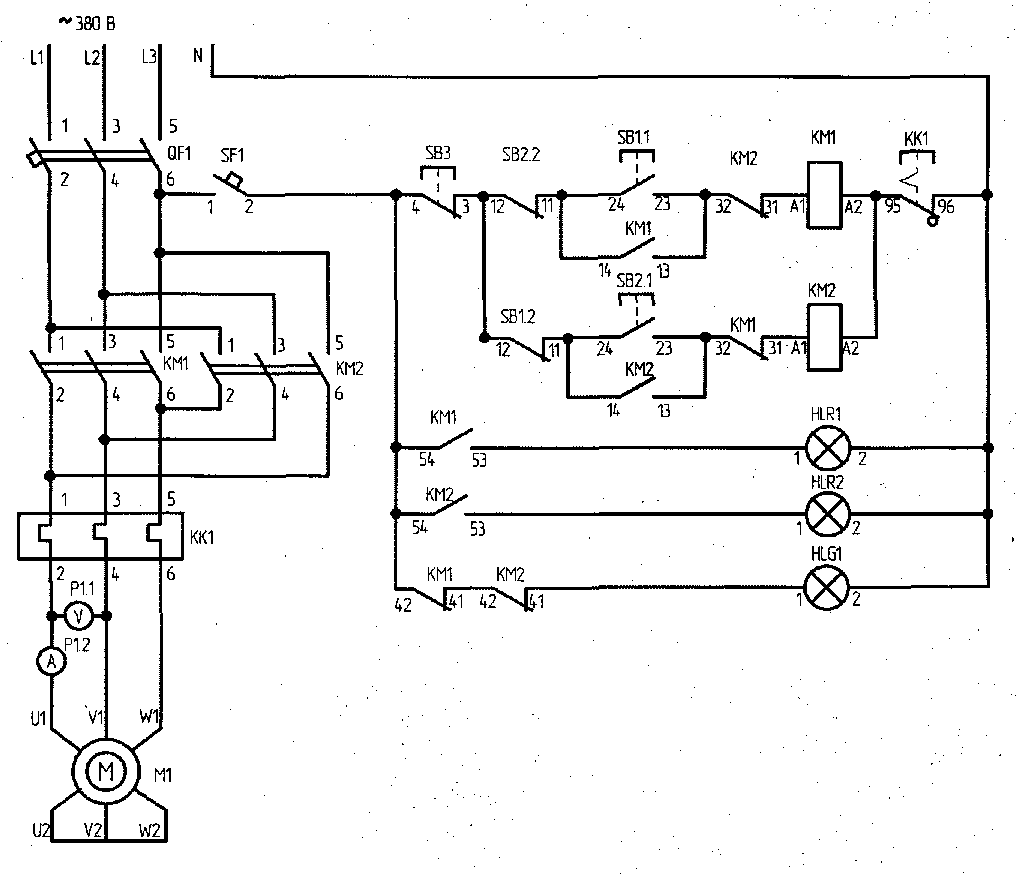
• Нажмите и отпустите кнопку « » на мониторе А4. Загорится светодиод около надписи «ВПЕРЕД».
• Нажмите и отпустите кнопку « » на мониторе А4. В результате произойдет подключение двигателя Ml к электрической сети. Стрелки вольтметра PV1 и амперметра РА1 укажут напряжение и увеличившийся ток двигателя Ml. Двигатель Ml останется неподвижным и начнет издавать характерный гудящий звук. Через время t2 = 5 с двигатель Ml должен аварийно отключиться от электрической сети. Об этом будет сигнализировать надпись «OL2», которая должна появиться на мониторе блока А4.
• По завершении эксперимента отключите шкаф от сети электропитания лаборатории, снимите стопорное устройство с вала двигателя Ml и установите защитный кожух.
• Подайте на шкаф электропитание от сети лаборатории.
• На мониторе тока двигателя А4 (далее мониторе) высветится надпись «А.000», означающая увеличенное в 100 раз текущее (равно нулю) значение тока в фазе «А» двигателя Ml, а также загорится светодиод около надписи «СТОП».
• Проверьте, что в мониторе А4 заданы следующие значения параметров управления асинхронного двигателя: токи I1 = 0,42 А (во всех фазах), I2 = 50%, I3 = 70% и времена t0=10 с, tl = 3 с,
t2 = 5 с, t3 = 5 с. Если это не так, то восстановите их или измените на свои желаемые значения этих параметров. (Порядок проверки, восстановления и изменения параметров приведен в разделе «Программирование монитора тока двигателя» настоящего руководства).
• Нажмите и отпустите кнопку « » на мониторе А4. Загорится светодиод около надписи «ВПЕРЕД».
• Нажмите и отпустите кнопку « » на мониторе А4. Произойдет прямой пуск двигателя M1. Стрелки вольтметра Р1 и амперметра Р2 укажут напряжение и ток двигателя Ml. На мониторе А4 высветится увеличенное в 100 раз текущее значение тока двигателя Ml в выбранной фазе. Для наблюдения значения тока
в другой фазе нажмите и отпустите кнопку « ».
• Нажимая кнопку «» добейтесь загорания светодиода около
надписи «НАЗАД».
• Нажмите и отпустите кнопку « » на мониторе А4. Через время t0 = 10 с должен произойти прямой пуск двигателя M1 с обратным направлением вращения. Стрелки вольтметра Р1 и амперметра Р2 укажут напряжение и ток двигателя Ml. На мониторе А4 высветится увеличенное в 100 раз текущее значение тока двигателя Ml в выбранной фазе. Для наблюдения значения тока
в другой фазе нажмите и отпустите кнопку « ».
• Нажимая кнопку « » добейтесь загорания светодиода около надписи «СТОП».
• Осуществите останов двигателя M1 нажатием на кнопку
« » монитора А4.
• Нажмите и отпустите кнопку « » на мониторе А4. Загорится светодиод около надписи «ВПЕРЕД».
• Осуществите повторный пуск двигателя Ml нажатием кнопки включении SB стрелка милливольтметра остается неподвижной, т.к. индуктируемые в обмотках 1 и 2 напряжения окажутся приложенными навстречу друг другу и, следовательно, индукционный ток равен нулю.
Затем обмотку, включенную на милливольтметр, заменяют одной из обмоток, включенных под напряжение, и аналогичным способом находят какой ее вывод является одноименным с ранее определенным. После чего производят маркировку обмоток.
После чего производят маркировку обмоток.
На рисунке 3, в приведена аналогичная схема, но с питанием от сети переменного тока. Индуктором служит тот же вольтметр, последовательно с которым включен диод VD.
При испытаниях обмоток нельзя допускать их перегрева, поэтому испытывают обмотки при напряжении 10-15 % номинального.
В качестве индуктора можно использовать вместо милливольтметра обычную лампу накаливания на соответствующее напряжение. Загорание лампы свидетельствует о правильном соединении обмоток.
Порядок выполнения работ
1. По заданию преподавателя измерить сопротивление изоляции асинхронного двигателя с помощью мегомметра до 500
В.
2. Собрать схему рис.2, предварительно убедившись, что рукоятка автотрансформатора выведена на ноль.
3. Включить автомат QF и убедиться в том, что на схему подано напряжение (загорается лампочка HL).
4. Установить переключатель SA в положении I.
5. Поворотом рукоятки «ЛАТР» установить нужное напряжение (обычно номинальное напряжение двигателя) U1 по вольтметру V и записать значение U1 и В.
6. Установить переключатель SA в положении II.
11
7. Записать установившееся напряжение U2, B, на вольтметре.
8. Подсчитать сопротивления изоляции Rиз по формуле 2.
9. Собрать схему рисунок 4.
10. Вывести рукоятку ЛАТР в «нуль», а тумблер SA в положение «0».
11. Установить перемычки С5-С3; С2-Х3; С6-Х4; С1-Х1; С4-Х2.
12. Установить с помощью ЛАТР на вольтметре PV необходимое напряжение (10-15% Uном).
13. Включить переключатель SA в положение 1. Если при этом загорится лампочка НL2, значит обмотка включена верно. Повторить пункты 1-5 и произвести маркировку обмоток.
14. Составить отчет о работе.
Рис.4. Электрическая схема для проведения лабораторной работы №1
Контрольные вопросы
1. Объясните, какие электромеханические преобразования происходят в электродвигателе?
2. На каком принципе преобразования энергии работает мегомметр?
3. Какие материалы применяются для изоляции обмоток электродвигателей?
Материал взят из книги Монтаж и эксплуатация электрооборудования предприятий и установок (Амирова С. С.)
С.)
Принципиальная схема реверсивного пуска двигателя
Реверсивный пуск двигателя необходим для того, чтобы обусловить вращение в обе стороны. Принцип встречается во многих устройствах: сверлильные, токарные, фрезерные станки. А кран-балки? Там все приводы работают в реверсивном режиме для обеспечения возможности хода моста вперед-назад, тельфера влево-вправо, лебедки вверх–вниз. И это далеко не все, где применяется такой режим работы. Именно о схеме реверсивного пуска двигателя можно прочитать в статье ниже.
Чем обусловлено реверсивное включение трехфазного двигателя
Для начала разберемся поверхностно, чем обусловлен реверс? Он обусловлен сменой 2-х проводов местами, как правило, в клейменной коробке двигателя.
На фото: образец клейменной коробки с подключением «звезда».
На рисунке выше мы видим, что начала обмоток (С1, С3, С5) свободны для включения в сеть. Концы обмоток (С2, С4, С6) соединены вместе.
На фото: подключение с прямым включением двигателя в сеть.
На рисунке цветными кругами обозначены контакты для подключения фаз. Желтым цветом обозначена фаза А, и подведена она к контакту С1, зеленым — фаза В (С3), желтым — фаза С (С5).
Соблюдая вышесказанные условия, мы сменим любые 2 фазы местами и подключим следующим образом. Фаза А остается на своем месте, контакте С1, фаза В ставится на контакт С5, а фаза С ставится на контакт С3.
На фото: подключение «звезда» с реверсивным включением.
Таким образом, выходит, что нам необходимо 2 пускателя. Один пускатель необходим для обеспечения прямого включения, а второй — для реверсивного включения.
Определение режима работы
Теперь определимся, как будет работать двигатель: постоянно включен и отключается при нажатии кнопки «стоп». Как, к примеру, в сверлильном, токарном, фрезерном станках. Или же нам нужно, чтобы он работал при удерживании кнопки «пуск-вправо» или «пуск-влево», как, к примеру, в лебедках, электротележках, кран-балках.
Для первого случая необходимо составить схему реверсивного пуска асинхронного двигателя таким образом, чтоб осуществлялось самошунтирование пускателя, а также защитить от случайного включения второго пускателя.
Схема реверсивного включения с блокировкой, и защитой
Описание работы вышеуказанной схемы
Разберем работу принципиальной схемы реверсивного пуска двигателя. Ток поступает от фазы С на нормально замкнутую общую кнопку КнС, кнопка «стоп». После чего проходит через общее реле тока, которое защитит двигатель от перегрузок. Затем при нажатии КнП «право» ток проходит через нормально замкнутый контакт пускателя КМ2. Поступая на катушку пускателя КМ1, сердечник втягивается, замыкая силовые контакты, разрывая питание на пускатель КМ2.
Так необходимо делать для того, чтобы разорвать питание второго пускателя и защитить цепи от короткого замыкания. Ведь реверс обеспечен тем, что 2 любые фазы меняются местами. Таким образом, если при включенном КМ1 нажать кнопку КнП «лево», пуск не произойдет. Самошунтирование обеспечено вспомогательным контактом, изображенным под КнП «право». Когда пускатель включен, замкнут и этот контакт, обеспечивая питание на катушку пускателя.
Для того чтобы остановить двигатель, необходимо нажать КнС («стоп»), вследствие чего катушка пускателя потеряет питание и придет в нормальное состояние. Теперь, когда КМ1 пришел в нормальное состояние, он замкнул нормально замкнутую группу вспомогательных контактов, благодаря чему катушка пускателя КМ2 снова может получать питание, и стало возможно запустить вращение в противоположную сторону. Для этого нажмем КнП «лево», тем самым включая пускатель КМ2. Получая питание, катушка втягивает сердечник и замыкает силовые контакты, включая питание на двигатель, сменив 2 фазы местами.
Разбирая работу данной схемы реверсивного пуска двигателя, можно заметить что шунтирование обеспечено нормально разомкнутым вспомогательным контактом, изображенным под кнопкой КнП «лево», и оно разрывает питание на пускатель КМ1, делая невозможным его включение.
Выше была рассмотрена схема для трехфазного привода. В самом начале схемы сразу после КнС можно увидеть нормально замкнутый контакт от реле тока.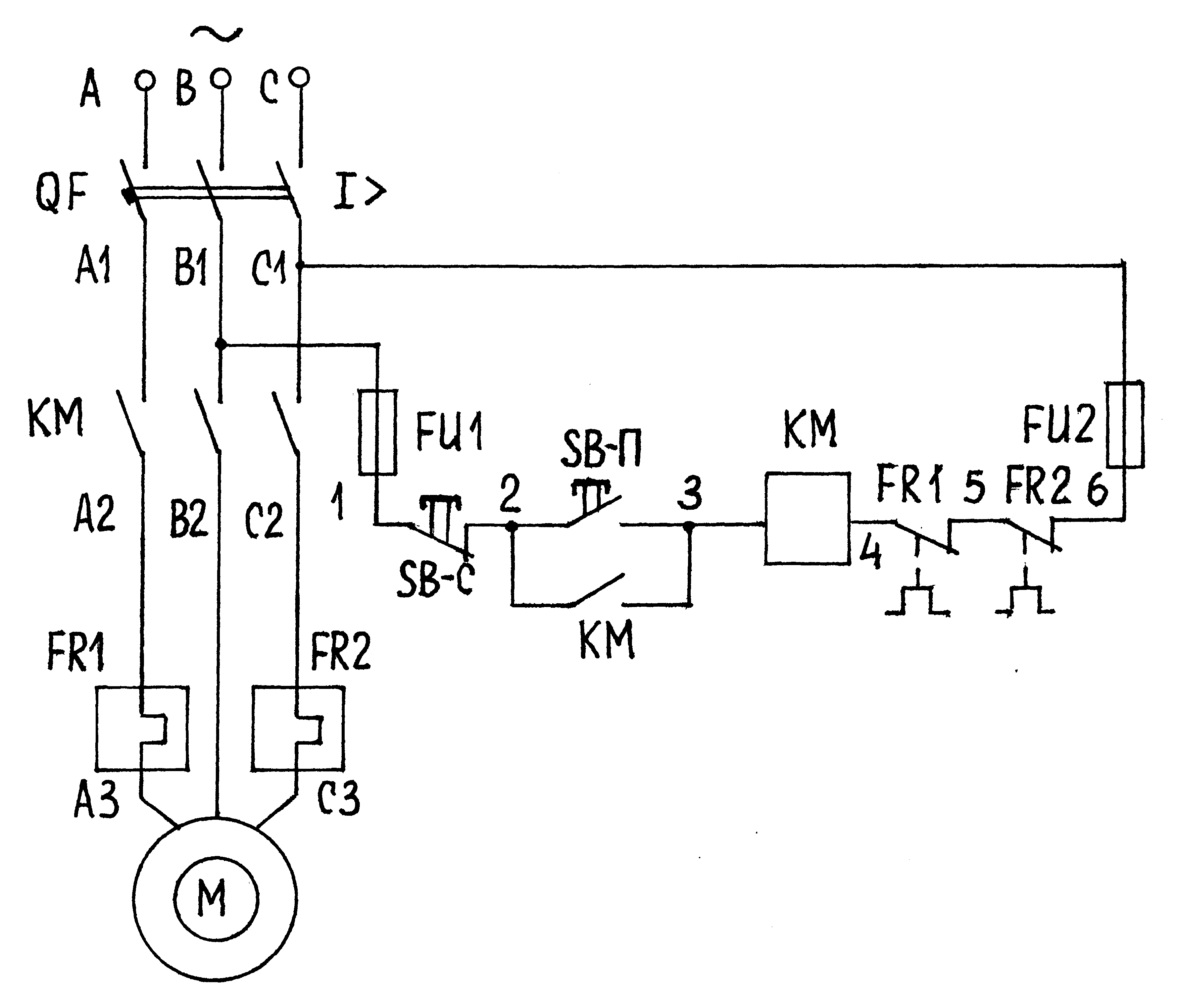 В случае потребления двигателем чрезмерного тока, реле срабатывает, разрывая питание на всю цепь управления. Все, что работает в цепи управления, потеряет питание, это и спасет двигатель от выхода из строя.
В случае потребления двигателем чрезмерного тока, реле срабатывает, разрывая питание на всю цепь управления. Все, что работает в цепи управления, потеряет питание, это и спасет двигатель от выхода из строя.
Подробнее о взаимоблокировке
Электрическая схема реверсивного пуска асинхронного двигателя требует наличия взаимоблокировки. Стоит понимать, что для смены направления вращения асинхронного двигателя нужно сменить любые 2 фазы местами. Для этого входы пускателей соединяются прямо, а выход соединяется накрест любые 2 фазы. В случае включения обоих пускателей одновременно произойдет короткое замыкание, которое, скорее всего, спалит силовые контактные группы на пускателях.
Для того чтобы избежать короткого замыкания при монтаже реверсивного пуска двигателя, нужно исключить одновременную работу обоих пускателей. Именно поэтому необходимо применять схему взаимоблокировки. При включенном первом пускателе разрывается питание на второй пускатель, чем и исключается его случайное включение, к примеру, одновременно нажаты обе кнопки «пуск».
Если так вышло, что при нажатии кнопки, которая должна включить «вращение вправо», а двигатель вращается влево, и, наоборот, при нажатии «вращение влево» двигатель вращается вправо, не стоит собирать заново всю схему. Просто поменяйте местами на вводе 2 провода — вот и все, проблема решена.
Может случиться так, что на вводе это сделать невозможно по каким-либо обстоятельствам. В таком случае смените местами 2 провода в клейменной коробке на двигателе. И снова проблема решена. Кнопка, отвечающая за вращение вправо, запустит вращение вправо, а кнопка, отвечающая за вращение влево, запустит вращение влево.
Монтажная схема реверсивного пуска двигателя асинхронного (однофазного)
Выше показана схема реверсивного подключения однофазного двигателя. Данная схема реверсивного пуска двигателя намного проще предыдущей. Здесь используется 3-позиционный выключатель.
Описание схемы реверсивного подключения однофазного двигателя
В позиции 1 сетевое напряжение передается на левую ножку конденсатора, благодаря чему двигатель вращается, условно говоря, влево. В положении 2 питание поступает на правую ножку конденсатора, благодаря чему двигатель вращается, условно выражаясь, вправо. В среднем положении двигатель остановлен.
В положении 2 питание поступает на правую ножку конденсатора, благодаря чему двигатель вращается, условно выражаясь, вправо. В среднем положении двигатель остановлен.
РТ здесь устроено намного проще. Как видим, и здесь исключено одновременное включение 3-позиционным выключателем. Для тех, кого интересует вопрос, а что же, все-таки, произойдет при одновременном включении, ответим просто: двигатель выйдет из строя.
Схема реверсивного включения без самошунтирования
Подробнее о схеме управления пуском реверсивного асинхронного двигателя мы расскажем вам так. При нажатии кнопки КнП «право» питание поступает через нормально замкнутый контакт КнП «лево», а благодаря механическому соединению разрывает питание пускателя КМ2, исключая возможность включения КМ2 при одновременном нажатии 2-х кнопок. Далее ток течет к нормально замкнутому контакту пускателя КМ2 на катушку пускателя КМ1, вследствие чего он срабатывает, включая питание на двигатель. Реверс включается КнП «лево», которая так же своими нормально замкнутыми контактами разрывает питание пускателя КМ1, а нормально разомкнутым включает питание пускателя КМ2. Тот, в свою очередь, включает питание на двигатель, но со сменой 2-х фаз местами.
Тот, в свою очередь, включает питание на двигатель, но со сменой 2-х фаз местами.
Обратим внимание на схему управления. А точнее, на взаимоблокировку. Она здесь устроена немного по-другому. Питание одного пускателя, мало того что заблокировано нормально замкнутым контактом противоположного пускателя, так еще и блокируется нажатием кнопки. Это сделано для того, чтоб при одновременном нажатии 2-х кнопок за те доли секунды, пока пускатель не разорвет питание второго пускателя, они не включились одновременно.
Для однофазного двигателя схема
При нажатии и удержании одной кнопки происходит разрыв питания на вторую кнопку, питание подходит к 1-й ножке конденсатора. При нажатии второй кнопки питание разрывается после первой кнопки и поступает на 2-ю ножку конденсатора. РТ все так же защищает двигатель от перегрузок.
Заключение
В заключение можно отметить, что, где бы вы ни применяли подобные схемы, обращайте внимание на взаимоблокировку. Это та необходимая мера, которая защитит оборудование от поломки. Кроме того, нужно правильно подбирать пускатели для трехфазных вариантов, и кнопки для однофазных вариантов. Ведь неправильно подобранное оборудование по мощности, току и напряжению, быстро придет в негодность, еще и может вывести из строя двигатель.
Кроме того, нужно правильно подбирать пускатели для трехфазных вариантов, и кнопки для однофазных вариантов. Ведь неправильно подобранное оборудование по мощности, току и напряжению, быстро придет в негодность, еще и может вывести из строя двигатель.
Автор:
Valeriy Demin
Автор публикации
0
Комментарии: 0Публикации: 187Регистрация: 21-03-2018
Запуск электродвигателя по схеме «звезда-треугольник»
Практически любое производство в наши дни не обходится без мощного асинхронного электродвигателя. При запуске такого двигателя пусковой ток в 3-8 раз превышает значение номинального тока, необходимого для работы в нормально-устойчивом режиме.
Большой пусковой ток необходим для того, чтобы раскрутить ротор из состояния покоя. Для этого необходимо приложить гораздо больше усилий, чем для дальнейшего поддержания постоянного числа оборотов в заданный промежуток времени. Значительные величины пусковых токов у асинхронных двигателей являются весьма нежелательным явлением, поскольку это может приводить к кратковременной нехватке энергии для другого подключенного к этой же сети оборудования (падению напряжения). Масса примеров такого влияния встречается как на производстве, так и в быту. Первое, что вспоминается — это «мигание» электрической лампочки при работе сварочного аппарата, но бывают случаи серьезнее: просадка напряжения может стать причиной бракованной партии товара на производстве, что ведет к большим финансовым и трудовым затратам. Большой пусковой ток также может вызвать ощутимые тепловые перегрузки обмотки электродвигателя, в результате чего происходит старение изоляции, ее повреждение и в конечном итоге может произойти сгорание двигателя.
Масса примеров такого влияния встречается как на производстве, так и в быту. Первое, что вспоминается — это «мигание» электрической лампочки при работе сварочного аппарата, но бывают случаи серьезнее: просадка напряжения может стать причиной бракованной партии товара на производстве, что ведет к большим финансовым и трудовым затратам. Большой пусковой ток также может вызвать ощутимые тепловые перегрузки обмотки электродвигателя, в результате чего происходит старение изоляции, ее повреждение и в конечном итоге может произойти сгорание двигателя.
Все это послужило мотивом для поиска решения по минимизации токов пуска. Одним из таких решений является метод запуска двигателя по схеме «звезда-треугольник». Для начала разберемся что же такое «звезда», а что — «треугольник», и чем они отличаются друг от друга. Звезда и треугольник являются самыми распространенными и применяемыми на практике схемами подключения трехфазных электродвигателей. При включении трехфазного электродвигателя «звездой» (см. Рисунок 1) концы обмоток статора соединяются вместе, соединение происходит в одной точке, называемой нулевой точкой или нейтралью. Трехфазное напряжение подается на начало обмоток.
Рисунок 1) концы обмоток статора соединяются вместе, соединение происходит в одной точке, называемой нулевой точкой или нейтралью. Трехфазное напряжение подается на начало обмоток.
Рисунок 1 — Схема подключения «звезда»
При соединении обмоток статора «звездой», соотношение между линейным и фазным напряжениями выражается формулой:
Uл=Uф⋅3U _л= U _ф cdot sqrt{3}
где:
Uл — напряжение между двумя фазами;
Uф — напряжение между фазой и нейтральным проводом;
Значения линейного и фазного токов совпадают, т. е. Iл = Iф.
При включении трехфазного электродвигателя по схеме «треугольник» (см. Рисунок 2) обмотки статора электродвигателя соединяются последовательно. Таким образом, конец одной обмотки соединяется с началом следующей, напряжение в этом случае подается на точки соединения обмоток. При соединеии обмоток статора «треугольником» напряжение на фазе равно линейному напряжению между двумя проводами: Uл = Uф. 2 )}
2 )}
где:
U — фазное напряжение обмотки статора;
r1 — активное сопротивление фазы обмотки статора
r2 — приведенное значение активного сопротивления фазы обмотки ротора;
x1 — индуктивное сопротивление фазы обмотки статора;
x2 — приведенное значение индуктивного сопротивления фазы обмотки неподвижного ротора;
m — количество фаз;
p — число пар полюсов.
Чтобы было нагляднее, давайте рассмотрим пример: предположим, что рабочей схемой обмотки асинхронного электродвигателя является «треугольник», а линейное напряжение питающей сети равно 380 В, сопротивление обмотки статора Z = 10 Ом. Если обмотки во время пуска подключены «звездой», то уменьшатся напряжение и ток в фазах:
Uф=Uл3=3803=220ВU _ф= {U _л} over { sqrt{3} } = {380} over {sqrt{3}} =220В
Фазный ток равен линейному току и равен:
Iф=Iл=UфZ=22010=22AI _ф=I _л= {U _ф} over {Z } = {220} over {10} =22A
После того, как двигатель набрал необходимые обороты, т.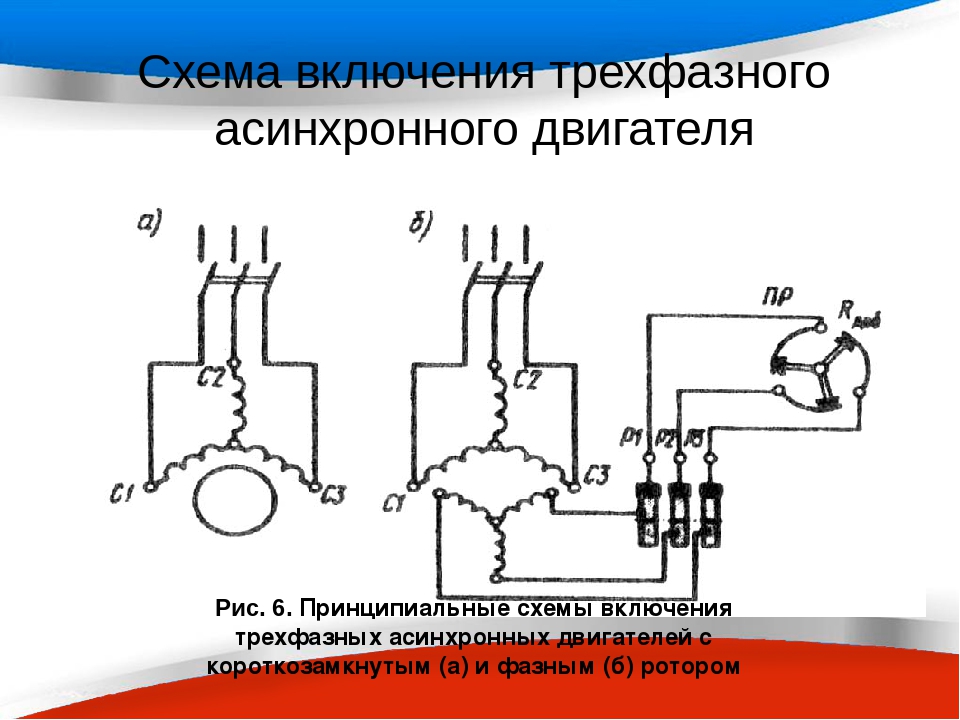 е. разогнался, переключаем обмотки со «звезды» на «треугольник», в этом случае получаем совершенно другие значения тока и напряжения:
е. разогнался, переключаем обмотки со «звезды» на «треугольник», в этом случае получаем совершенно другие значения тока и напряжения:
Uф=Uл=380BU _ф=U _л =380B
Iф=UфZ=38010=38AI _ф = {U _ф} over {Z} = {380} over {10}=38A
Iл=3⋅Iф=3⋅38=65,8AI _л= sqrt{3} cdot I _ф=sqrt{3} cdot38=65,8A
Соответственно, при пуске двигателя по схеме «звезда», фазное напряжение в √3 раз меньше линейного, а по схеме «треугольник» — они равны. Отсюда следует, что момент при пуске по схеме «звезда» в 3 раза меньше, а
значит, запуская двигатель по этой схеме, мы не сможем добиться выхода двигателя на номинальную мощность. Решая одну проблему возникает вторая, не менее острая, чем повышенные пусковые токи. Но единое решение все-таки есть: необходимо скомбинировать схемы подключения двигателя так, чтобы при пуске мощного двигателя не было больших токов в сети, а после того, как двигатель выйдет на необходимые для его работы обороты, происходит переключение на схему «треугольник», что позволяет работать со 100% нагрузкой без каких-либо проблем.
С поставленной задачей прекрасно справляется реле времени Finder 80.82. При подаче питания на реле, мгновенно замыкается контакт, который отвечает за подключение по схеме «звезда». После заданного промежутка времени, на котором обороты двигателя достигают рабочей частоты, контакт схемы «звезда» размыкается и замыкается контакт, который отвечает за подключение по схеме «треугольник». Контакты останутся в таком положении до снятия питания с реле. Наглядная диаграмма работы данного реле представлена на Рисунке 3.
Рисунок 3 — Временная диаграмма реле времени 80.82
Рассмотрим более подробно реализацию данной схемы на практике. Она применима только для двигателей, у которых на шильдике указано «Δ/Y 380/660В». На Рисунке 4 представлена силовая часть схемы
«звезда-треугольник», в которой используется три электромагнитных пускателя.
Рисунок 4 — Силовая часть схемы «звезда-треугольник»
Как было описано ранее, для управления переключением со схемы «звезда» на схему «треугольник» необходимо воспользоваться реле Finder 80.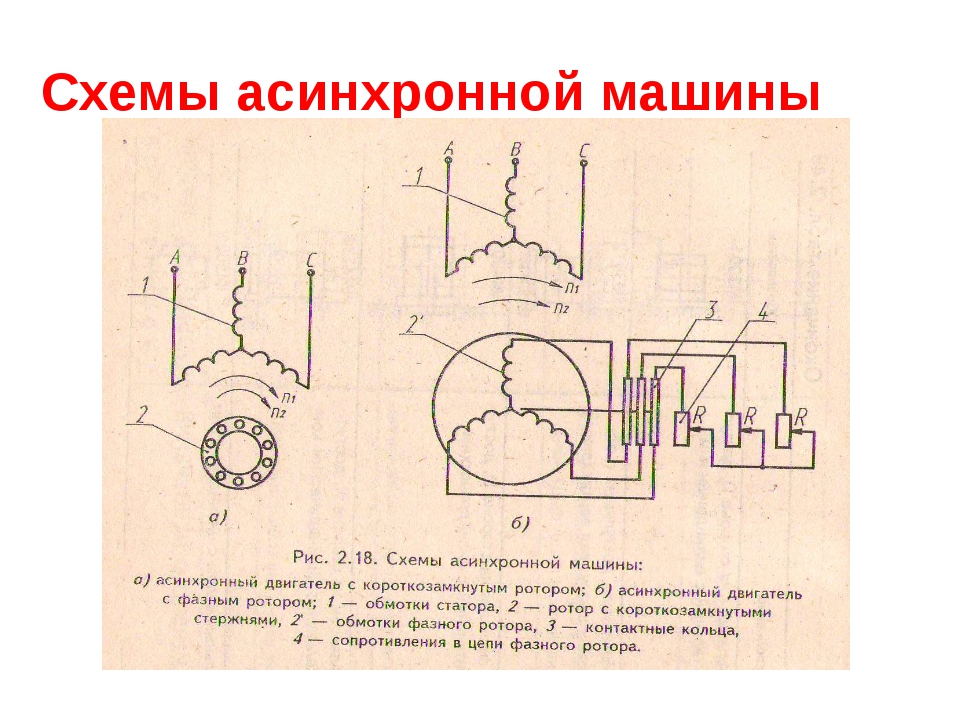 82. На Рисунке 5 представлена схема управления с помощью данного реле.
82. На Рисунке 5 представлена схема управления с помощью данного реле.
Рисунок 5 — Управление схемой «звезда-треугольник»
Разберем алгоритм работы данной схемы:
После нажатия кнопки S1.1, запитывается катушка пускателя КМ1, в результате чего, замыкаются силовые контакты КМ1 и при помощи дополнительного контакта КМ1.1 реализуется самоподхват пускателя. Одновременно подается напряжение на реле времени U1. Замыкаются контакты реле времени 17-18 и включается пускатель КМ2. Таким образом, происходит запуск двигателя по схеме «звезда». По истечении времени Т (см. Рисунок 3), контакт реле времени 17-18 мгновенно разомкнется, пройдет задержка времени Tu, и замкнется контакт 17-28. Вследствие чего, сработает пускатель КМ3, который осуществляет переключение на схему «треугольник». Нормально замкнутые контакты пускателей КМ2.2 и КМ3.2 используется для предотвращения одновременного включения пускателей КМ2 и КМ3. Чтобы защитить двигатель от перегрузки, в силовой цепи установлено тепловое реле КК1.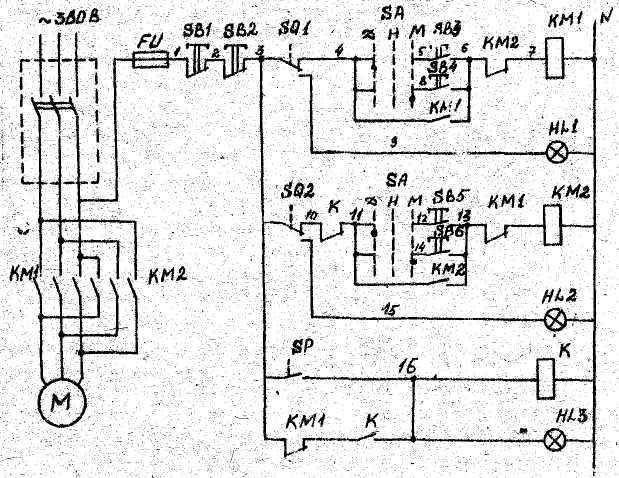 В случае перегрузки, тепловое реле разомкнет силовую цепь и цепь управления через контакт КК1.1. Остановка двигателя происходит при нажатии кнопки S1.2, которая разрывает цепь самоподхвата и обесточит катушку пускателя КМ1.
В случае перегрузки, тепловое реле разомкнет силовую цепь и цепь управления через контакт КК1.1. Остановка двигателя происходит при нажатии кнопки S1.2, которая разрывает цепь самоподхвата и обесточит катушку пускателя КМ1.
Обобщая написанное, можно сделать вывод, что для облегчения пуска мощного электродвигателя, рекомендуется изначально запускать его по схеме «звезда», что позволяет значительно снизить пусковые токи, уменьшить просадку напряжения в сети, но не позволяет двигателю выйти на номинальный режим работы. Для выхода двигателя на номинальный режим необходимо осуществить переключение обмоток статора на схему «треугольник». Схема переключения обмоток со «звезды» в «треугольник» реализована с помощью реле времени Finder 80.82, в котором устанавливается время разгона электродвигателя.
Список использованной литературы:
- ГОСТ 11828-86 «Определение вращающих моментов и пусковых токов».
- Вешеневский С. Н. Характеристики двигателей в электроприводе.
 // Издание 6-е, исправленное — Москва, Издательство «Энергия», 1977
// Издание 6-е, исправленное — Москва, Издательство «Энергия», 1977 - Войнаровский П. Д. Электродвигатели // Энциклопедический словарь Брокгауза и Ефрона: в 86 т. (82 т. и 4 доп.) — СПб., 1890—1907
 // Издание 6-е, исправленное — Москва, Издательство «Энергия», 1977
// Издание 6-е, исправленное — Москва, Издательство «Энергия», 1977Читайте также:
Схема нереверсивного пуска асинхронного двигателя
Типовые конфигурации и принципы действия электродвигателей
Есть два наиболее распространенных вида моторов, подключение которых можно выполнить без дополнительных деталей. Это асинхронные двигатели с однофазным или трехфазным питанием и коллекторные устройства.
В асинхронных однофазных двигателях обмотка на роторе короткозамкнутая, по конструкции напоминающая колесо для белки. Замкнутые на кругах стержни входят в пазы сердечника, где при индукции тока создается поле уравновешивающее электромагнитное поле катушки. Для того, чтобы после подключения к сети мотор заработал, нужен стартовый толчок. В некоторых случаях, например на точильном станке двигатель можно запустить вручную, простым вращательным движением вала.
Можно также снабдить самодельный инструмент дополнительной стартовой обмоткой или частотным преобразователем, который обеспечит плавный запуск мотора. Начало вращения в асинхронных двигателях с трехфазной обмоткой статора происходит автоматически, благодаря чередованию фаз
Как видно на структурной схеме, в коллекторном электродвигателе имеются рабочая и пусковая обмотки. Переключение обмотки на роторе происходит при помощи графитовых щеток, единовременно под напряжением находится только одна из рамок, с магнитным полем, перпендикулярным полю статорной обмотки.
Разница полюсов сдвигает ротор по кругу, достигая определенного угла, контакт с щетками перебрасывается на вторую рабочую обмотку, что обеспечивает непрерывное вращательное движение.
Схемы подключения трехфазного двигателя. К 3-х и 1-о фазной сети
Схемы подключения трехфазного двигателя — двигатели, рассчитанные на работу от трехфазной сети, имеют производительность гораздо выше, чем однофазные моторы на 220 вольт. Поэтому, если в рабочем помещении проведены три фазы переменного тока, то оборудование необходимо монтировать с учетом подключения к трем фазам. В итоге, трехфазный двигатель, подключенный к сети, дает экономию энергии, стабильную эксплуатацию устройства. Не нужно подключать дополнительные элементы для запуска. Единственным условием хорошей работы устройства является безошибочное подключение и монтаж схемы, с соблюдением правил.
Поэтому, если в рабочем помещении проведены три фазы переменного тока, то оборудование необходимо монтировать с учетом подключения к трем фазам. В итоге, трехфазный двигатель, подключенный к сети, дает экономию энергии, стабильную эксплуатацию устройства. Не нужно подключать дополнительные элементы для запуска. Единственным условием хорошей работы устройства является безошибочное подключение и монтаж схемы, с соблюдением правил.
Схемы подключения трехфазного двигателя
Из множества созданных схем специалистами для монтажа асинхронного двигателя практически используют два метода:
- Схема звезды.
- Схема треугольника.
Названия схем даны по методу подключения обмоток в питающую сеть. Чтобы на электродвигателе определить, по какой схеме он подключен, необходимо посмотреть указанные данные на металлической табличке, которая установлена на корпусе двигателя.
Даже на старых образцах моторов можно определить метод соединения статорных обмоток, а также напряжение сети. Эта информация будет верна, если двигатель уже был в эксплуатации, и никаких проблем в работе нет. Но иногда нужно произвести электрические измерения.
Эта информация будет верна, если двигатель уже был в эксплуатации, и никаких проблем в работе нет. Но иногда нужно произвести электрические измерения.
Схемы подключения трехфазного двигателя звездой дают возможность плавного запуска мотора, но мощность оказывается меньше номинального значения на 30%. Поэтому по мощности схема треугольника остается в выигрыше. Существует особенность по нагрузке тока. Сила тока резко увеличивается при запуске, это отрицательно сказывается на обмотке статора. Возрастает выделяемое тепло, которое губительно воздействует на изоляцию обмотки. Это приводит к нарушению изоляции, и поломке электродвигателя.
Много европейских устройств, поставленных на отечественный рынок, имеют в комплекте европейские электродвигатели, действующие с напряжением от 400 до 690 В. Такие 3-фазные моторы необходимо монтировать в сеть 380 вольт отечественного напряжения только по треугольной схеме обмоток статора. В противном случае моторы сразу будут выходить из строя. Российские моторы на три фазы подключаются по звезде. Изредка производится монтаж схемы треугольника для получения от двигателя наибольшей мощности, применяемой в специальных видах промышленного оборудования.
Изредка производится монтаж схемы треугольника для получения от двигателя наибольшей мощности, применяемой в специальных видах промышленного оборудования.
Подключение электромотора на самодельных устройствах
Перед использованием электродвигателя нужно навести справки о его типе и особенностях конструкции. Единственной доступной информацией при этом может быть лишь серийная маркировка на корпусе, остальное — мощность, тип, возможные системы управления двигателем – придется поискать в технических справочниках.
Проверка проводных выходов и корпуса на короткое замыкание — застрахует от аварий. Для этого, после визуального осмотра на предмет следов возгорания, при помощи мультиметра нужно сделать прозвон всех контактов и корпуса, затем проверить обмотки и выводы, и также конденсаторы при наличии.
Запуск двигателя коллекторного типа
Коллекторные двигатели компактны и работают на высоких оборотах. Ими оснащаются малогабаритные бытовые приборы, например, миксеры, мясорубки, кофемолки и стиральные машины, а также ручные инструменты — дрели, шуруповёрты, дисковые пилы и т.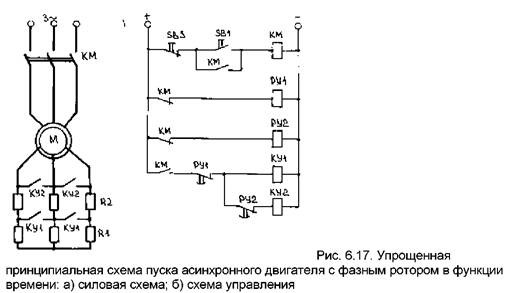 п.
п.
На фото – схема подключения такого электродвигателя к питанию 220В через простой замыкающий выключатель. Кнопка в зажатом положении подает ток на обмотки статора и ротора. При двух разных обмотках на статоре можно сделать перемычку для переключения скоростей.
Способы подключения асинхронных двигателей
Различные модели асинхронных двигателей используются в бытовых кондиционерах, в насосных системах и аппаратуре промышленного назначения. Они, как правило, оснащаются преобразователями частоты, которые в зависимости от предназначения, выполняют постепенный набор оборотов при включении, или плавное, не ступенчатое, переключение скоростей.
Схема подключения обычно дается прямо на корпусе, где маркируются выводящие провода пусковой и рабочей обмотки. В других случаях их можно определить при помощи замеров сопротивления. Величина в Омах в двух вариантах последовательного соединения должна в сумме быть равной показателю сопротивления пары обмоток ротора и статора.
Рабочая обмотка может отличаться и визуальной толщиной в сечении. Она подключается к конденсатору, а вывод от статора напрямую к 220В.
Конденсаторы могут быть установлены по схеме подключения к статорной обмотке, для обеспечения пуска электродвигателя, или в качестве рабочего устройства, подсоединенного к основной обмотке. Возможен и комбинированный вариант с двумя конденсаторами.
Емкость теплообменника зависит от мощности мотора в расчете 7мкФ на 100Вт. Чрезмерный нагрев корпуса после запуска свидетельствует о недостаточной емкости подключенных конденсаторов. Если наблюдается спад мощности и замедление оборотов, следует уменьшить емкость.
Трехфазными двигателями, отличающимися большой мощностью и возможностью автоматического старта оборудуют деревообрабатывающие и токарные станки. К трехфазной сети питания такие моторы подсоединяются в двух конфигурациях: треугольной или в виде звезды.
Для подключения к сети с одной фазой необходимо наличие переходного конденсатора, но в этом случае будут потери мощности и скорости оборотов двигателя.

Частотные преобразователи – важный элемент системы управления двигателем, могут быть заменены симисторами для плавного пуска, которые подключаются по трехфазной схеме. Это позволяет снизить расход электроэнергии и износ мотора, предотвращает перегрев и дает ряд дополнительных возможностей для подключения автоматики.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
Рис. 5. Схема пуска с изменением питающего напряжения
Пуск и регулирование частоты вращения асинхронных двигателей
1.
 Пуск и регулирование частоты вращения асинхронных двигателей
Пуск и регулирование частоты вращения асинхронных двигателей
2. Основные способы пуска
3. Пуск двигателей с кз ротором
Ускорение при разгоне
4. Пуск двигателя с фазным ротором
Устройство плавного пуска мощных АДФР
Машины двойного питания. Вентильный каскад
7. Двигатели с повышенным пусковым моментом
8. Механические характеристики
9. Глубокопазные двигатели
10. Устройства для ограничения пускового тока
11. Регулирование частоты вращения
ЗАКОН М.П. КОСТЕНКО
Регулирование при постоянном моменте
Регулирование при постоянной мощности
М.П. Костенко
12. Структурные схемы ПЧ
а)
б)
Структурные схемы преобразователей частоты: а) циклоконвертора, б) преобразователя со
звеном постоянного тока. 1-циклоконвертор; 2– асинхронный двигатель; 3– управляемый
выпрямитель; 4– звено постоянного тока; 5– автономный инвертор.
14. Принципиальная схема инвертора
Принципиальная схема автономного инвертора, выполненного на транзисторах.
Uп– напряжение звена постоянного тока; VT1-VT6- транзисторы; VD1-VD6диоды обратного тока.
Принцип формирования напряжения при симметричном управлении.
Uп–напряжение звена постоянного тока, UABY, UAY–соответственно линейное и
фазное напряжения на активной нагрузке, соединенной звездой.
Алгоритм формирования напряжения при несимметричном
управлении. Угол открытия 120град. Uп–напряжение звена
постоянного тока, UABY, UAY–соответственно линейное и фазное
напряжения на активной нагрузке, соединенной звездой.
Алгоритм формирования напряжения при
несимметричном управлении. Угол открытия
150град Uп–напряжение звена постоянного тока,
UABY, UAY–соответственно линейное и фазное
напряжения на активной нагрузке, соединенной
звездой.
Алгоритм формирования напряжения при ШИМ по синусоидальному закону. Uп–напряжение звена постоянного тока, UABY, UAY–
соответственно линейное и фазное напряжения на активной нагрузке, соединенной звездой. UмА, UмВ UмС – модулирующие
UмА, UмВ UмС – модулирующие
напряжения. Uоп – опорное напряжение ШИМ; Тшим–период опорного напряжения ШИМ.
19. Скалярное управление U/f= const
20. Векторное управление с ориентацией по потокосцеплению ротора
21. Многоскоростные двигатели
22. Схема Даландера
Роберт Даландер (1870-1935)
Схема «Тройная звезда»
Ток в некоторых катушках
каждой фазы меняет направление
на противоположное.
При этом изменяется распределение
МДС и число пар полюсов.
Это
ПОЛЮСНО-АМПЛИТУДНАЯ
МОДУЛЯЦИЯ
Модернизация стенда управления асинхронным двигателем на базе частотного преобразователя TMDSHVMTRPFCKIT
Разработал ст. гр. ЭСА-11 -2 з
Руководитель
Олеярник А. В.
Наливайко А. М.
Цели и задачи дипломной работы
Цель дипломной работы:
Модернизация стенда управления асинхронным двигателем на базе
частотного преобразователя TMDSHVMTRPFCKIT.
Задачи:
– усовершенствование стенда частотного управления асинхронным
двигателем;
– реализация аппаратной защиты на стенде исследований модульной
системы векторного управления асинхронным двигателем;
– разработка лабораторной работы по результатам исследований.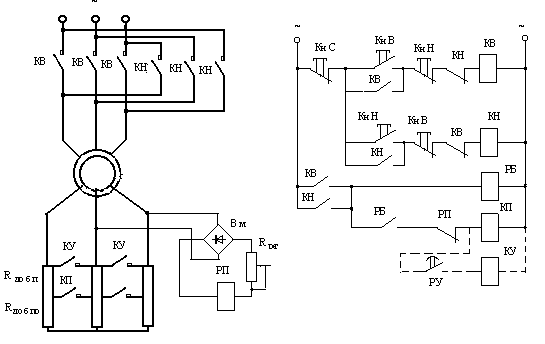
2
Блок-схема векторного управления
3
Рисунок 1 – Блоксхема векторного
управления
Рисунок 2 – Структурная схема наблюдателя
Структурная схема системы векторного управления
Рисунок 3 – Структурная схема системы векторного управления
4
Внешний вид частотного преобразователя
Рисунок 4 – Вид частотного
преобразователя TMDSHVMTRPFCKIT
Рисунок 5 – Блок-схема контроллера
TMS320F2833x
5
6
Стенда частотного управления АД
Рисунок 7 – Внешний вид стенда частотного управления АД
7
Принципиальная схема преобразователя
Рисунок 8 – Принципиальная схема преобразователя TMDSHVMTRPFCKIT
8
Выпрямитель
Рисунок 9 – Принципиальная схема выпрямителя напряжения
9
Инвертор
Рисунок 10 – Принципиальная схема инвертора
10
Электрическая схема стенда
Рисунок 11 – Электрическая схема
стенда
Рисунок 12 – Принципиальная схема
импульсного датчика скорости
11
12
13
14
15
16
17
18
19
20
21
22
Показатели экономической эффективности
Таблица 2 – Показатели экономической эффективности
Наименование расходов
Амортизационные отчисления, грн
Расходы на электроэнергию, грн
Заработная плата, грн (сумму полных
выплат по зарплате умножаем на
количество ремонтников)
Затраты на материалы, грн
Цеховые и общезаводские расходы, грн
Прочие расходы, грн
Вместе эксплуатационных расходов, грн
Сумма капитальных затрат, грн
Срок окупаемости капитальных затрат на
модернизацию
Коэффициент эффективности капитальных
вложений
Годовой экономический эффект, грн
Базовый
вариант
2280
2100
Новый
вариант
2280
1843
20664
16836
14207
2952
736
42939
40940
11573
2405
409
35346
40940
5,39 лет
0,186
7593
23
Заключение
Выводы:
– модернизирован стенд частотного управления асинхронным двигателем;
– реализована аппаратная защита модульной системы векторного
управления асинхронным двигателем;
– разработана лабораторная работа по результатам исследований.
Благодарю за внимание!
24
Асинхронный двигатель
| Схемы переменного тока
ДЕТАЛИ И МАТЕРИАЛЫ
- Источник питания переменного тока: 120 В переменного тока
- Конденсатор, 3,3 мкФ (или 2,2 мкФ), 120 В переменного тока или 350 В постоянного тока, неполяризованный
- Лампа накаливания от 15 до 25 Вт или резисторы 820 Ом 25 Вт
- # 32 AWG Магнитный провод
- деревянная доска ок. 5 дюйм. Кв.
- Сетевой шнур переменного тока с вилкой
- Диаметр 1,75 дюйма картонная трубка (рулон туалетной бумаги)
- патрон лампы
- Источник питания переменного тока: 220 В переменного тока
- Конденсатор, 1.5 мкФ 240 В переменного тока или 680 В постоянного тока, неполяризованный
- Лампа накаливания от 25 до 40 Вт или резисторы 820 Ом 25 Вт
- # 32 AWG Магнитный провод
- деревянная доска ок. 15 см. квадратный.
- Сетевой шнур переменного тока с вилкой
- от 4,5 до 5 см. диам. картонная трубка.
- патрон лампы
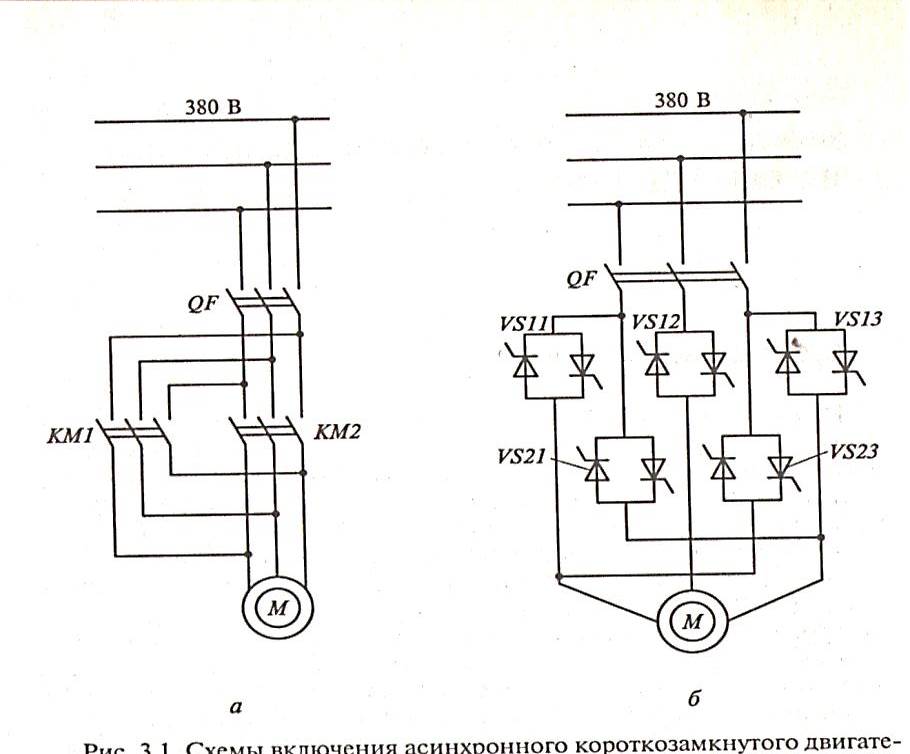 квадратный.
квадратный.ССЫЛКИ
Уроки электрических цепей , том 2, глава 13: «Двигатели переменного тока», «Однофазные асинхронные двигатели», «Двигатели с постоянными разделенными конденсаторами».
ЦЕЛИ ОБУЧЕНИЯ
СХЕМА
ИЛЛЮСТРАЦИЯ
ИНСТРУКЦИЯ
Есть два списка деталей на выбор, в зависимости от наличия 120 В переменного тока или 220 В переменного тока. Выберите тот, который подходит для вашего местоположения. Этот набор инструкций предназначен для версии на 120 В переменного тока.
Это упрощенная версия «асинхронного двигателя с постоянным конденсатором и расщепленной фазой».Под упрощением мы имеем в виду, что для катушек требуется всего несколько сотен витков провода вместо нескольких тысяч. Это легче намотать. Хотя и более крупная модель на несколько тысяч оборотов впечатляет. Имеются две обмотки статора, как показано на рисунке выше. Приблизительно 440 витков эмалированного магнитного провода # 32 AWG (американского калибра) намотаны на один дюйм длины немного более длинного участка трубки для туалетной бумаги диаметром 1,75 дюйма. Чтобы избежать подсчета витков, намотайте четыре слоя магнитной проволоки на один дюйм ширины трубки.См. (B) выше. Оставьте несколько дюймов магнитного провода для проводов. Обмотайте начальный провод рядом с концом трубки, чтобы обмотки закрывали ленту и закрепляли ее. Не обрезайте картонную трубку окончательной ширины, пока не закончите намотку. Закройте ветер одним слоем. Прежде чем переходить ко второму слою, скотчем или зацементируйте первый слой, чтобы предотвратить раскручивание. Хотя можно наматывать дополнительные слои непосредственно на существующие слои, подумайте о том, чтобы между слоями наклеить ленту или бумагу, как показано на схеме (b).
Это легче намотать. Хотя и более крупная модель на несколько тысяч оборотов впечатляет. Имеются две обмотки статора, как показано на рисунке выше. Приблизительно 440 витков эмалированного магнитного провода # 32 AWG (американского калибра) намотаны на один дюйм длины немного более длинного участка трубки для туалетной бумаги диаметром 1,75 дюйма. Чтобы избежать подсчета витков, намотайте четыре слоя магнитной проволоки на один дюйм ширины трубки.См. (B) выше. Оставьте несколько дюймов магнитного провода для проводов. Обмотайте начальный провод рядом с концом трубки, чтобы обмотки закрывали ленту и закрепляли ее. Не обрезайте картонную трубку окончательной ширины, пока не закончите намотку. Закройте ветер одним слоем. Прежде чем переходить ко второму слою, скотчем или зацементируйте первый слой, чтобы предотвратить раскручивание. Хотя можно наматывать дополнительные слои непосредственно на существующие слои, подумайте о том, чтобы между слоями наклеить ленту или бумагу, как показано на схеме (b).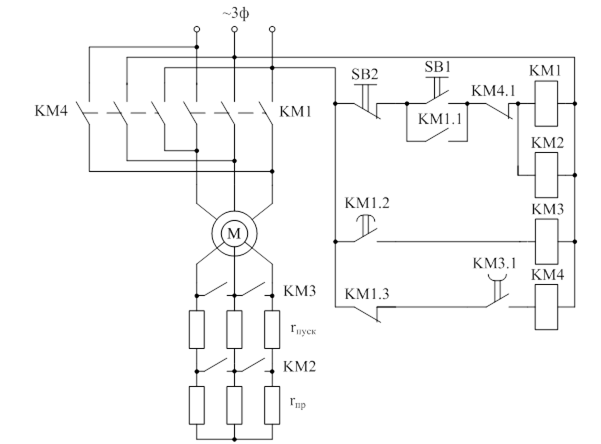 После того, как четыре слоя будут намотаны, приклейте обмотки на место.
После того, как четыре слоя будут намотаны, приклейте обмотки на место.
Если замкнуть намотку четырех слоев магнитной проволоки слишком сложно, намотайте 440 витков магнитной проволоки на конец картонной трубки. Однако катушка с закрытой намоткой легче крепится к плинтусу. Длина обмоток не должна превышать одного дюйма.
Отрежьте готовую обмотку с конца картонной трубки с помощью бритвенного ножа, чтобы форма немного выступила за пределы намотки. Зачистите эмаль на расстоянии сантиметра от концов пары выводных проводов наждачной бумагой.Соедините оголенные концы с изолированным соединительным проводом более толстого сечения. Припаяйте стык. Изолируйте лентой или термоусадочной трубкой. Закрепите стык на корпусе катушки. Затем приступайте ко второй идентичной катушке.
См. Как схематическую диаграмму, так и иллюстрацию для сборки. Обратите внимание, что катушки установлены под прямым углом. Их можно приклеивать к изоляционной плите, например, к дереву. Лампа мощностью 25 Вт соединена последовательно с одной катушкой. Это ограничивает ток, протекающий через катушку. Лампа заменяет силовой резистор 820 Ом.Конденсатор подключен последовательно с другой катушкой. Он также ограничивает ток через катушку. Кроме того, он обеспечивает опережающий фазовый сдвиг тока по отношению к напряжению. Схема и иллюстрация не показывают выключателя питания или предохранителя. При желании добавьте их.
Это ограничивает ток, протекающий через катушку. Лампа заменяет силовой резистор 820 Ом.Конденсатор подключен последовательно с другой катушкой. Он также ограничивает ток через катушку. Кроме того, он обеспечивает опережающий фазовый сдвиг тока по отношению к напряжению. Схема и иллюстрация не показывают выключателя питания или предохранителя. При желании добавьте их.
Ротор должен быть изготовлен из ферромагнитного материала, например, стальная крышка банки или крышка бутылки. На иллюстрации ниже показано, как изготовить ротор. Выберите круглый ротор либо меньше, чем форма катушки, либо немного больше.Используйте геометрию, чтобы найти и отметить центр. В центре должна быть ямочка. Выберите гвоздь диаметром восемь дюймов (несколько мм) (a) и подпилите или отшлифуйте острие, как показано на (b). Поместите ротор на кусок мягкой древесины (c) и вбейте закругленным концом в центр (d). Потренируйтесь на куске подобного металлолома. Будьте осторожны, чтобы не повредить ротор. Выпуклый ротор (f) или крышка (g) балансируют лучше, чем плоский ротор (e). Точка поворота (е) может быть прямым штифтом, проходящим через подвижный деревянный пьедестал или через основную доску.Кончик шариковой ручки также работает. Если ротор не балансирует на шарнире, удалите металл с тяжелой стороны.
Точка поворота (е) может быть прямым штифтом, проходящим через подвижный деревянный пьедестал или через основную доску.Кончик шариковой ручки также работает. Если ротор не балансирует на шарнире, удалите металл с тяжелой стороны.
Еще раз проверьте проводку. Убедитесь, что все оголенные провода изолированы. Схема может быть запитана без ротора. Лампа должна загореться. Обе катушки нагреются в течение нескольких минут. Избыточный нагрев означает, что лампа с меньшей мощностью (с более высоким сопротивлением) и конденсатор с меньшей мощностью должны быть последовательно заменены соответствующими катушками.
Поместите ротор на шарнир и переместите его между обеими катушками. Он должен крутиться. Чем ближе он будет, тем быстрее должен вращаться. Обе катушки должны быть теплыми, указывая на мощность. Попробуйте роторы другого размера и стиля. Попробуйте установить небольшой ротор на противоположной стороне катушек по сравнению с иллюстрацией.
Из-за отсутствия магнитного провода №32 AWG попробуйте 440 витков провода немного большего диаметра (меньшее число AWG).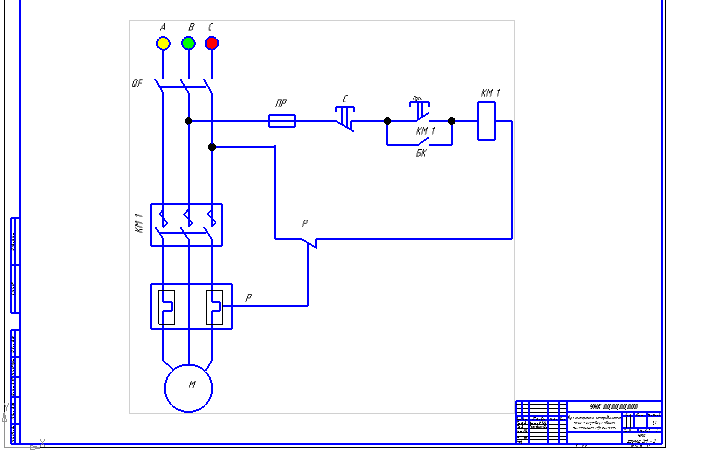 Для необходимых витков потребуется более 4 слоев. Ночник может быть дешевле, чем проиллюстрированный полноразмерный патрон.Хотя лампы ночного освещения имеют слишком низкую мощность — 3 или 7 Вт, в розетку подходят 15-ваттные лампочки.
Для необходимых витков потребуется более 4 слоев. Ночник может быть дешевле, чем проиллюстрированный полноразмерный патрон.Хотя лампы ночного освещения имеют слишком низкую мощность — 3 или 7 Вт, в розетку подходят 15-ваттные лампочки.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
Схема, эквивалентная
для асинхронного двигателя
Асинхронный двигатель — это хорошо известное устройство, которое работает по принципу трансформатора. Так его еще называют вращающимся трансформатором. То есть, когда на его статор подается ЭДС, то в результате электромагнитной индукции в его роторе индуцируется напряжение. Таким образом, асинхронный двигатель называется трансформатором с вращающейся вторичной обмоткой.Здесь первичная обмотка трансформатора напоминает обмотку статора асинхронного двигателя, а вторичная — ротор.
Асинхронный двигатель всегда работает со скоростью ниже синхронной или полной нагрузки, а относительная разница между синхронной скоростью и скоростью вращения называется скольжением, которое обозначается буквой s.
Где, N s — синхронная скорость вращения, которая определяется по формуле —
Где, f — частота напряжения питания.
P — количество полюсов станка.
Эквивалентная схема асинхронного двигателя
Эквивалентная схема любой машины показывает различные параметры машины, такие как омические потери, а также другие потери.
Потери моделируются только индуктором и резистором. Потери в меди возникают в обмотках, поэтому принимается во внимание сопротивление обмотки. Кроме того, обмотка имеет индуктивность, для которой наблюдается падение напряжения из-за индуктивного сопротивления, и также используется термин, называемый коэффициентом мощности.В случае трехфазного асинхронного двигателя существует два типа эквивалентных схем:
Точная эквивалентная схема
Здесь R 1 — сопротивление обмотки статора.
X 1 — индуктивность обмотки статора.
R c — компонент потерь в сердечнике.
X M — реактивное сопротивление намагничивания обмотки.
R 2 / с — мощность ротора, которая включает в себя выходную механическую мощность и потери в меди ротора.
Если мы нарисуем схему, относящуюся к статору, то схема будет выглядеть так:
Здесь все остальные параметры такие же, за исключением-
R 2 ’- сопротивление обмотки ротора относительно обмотки статора.
X 2 ’- индуктивность обмотки ротора относительно обмотки статора.
R 2 (1 — с) / с — это сопротивление, которое показывает мощность, которая преобразуется в механическую выходную мощность или полезную мощность. Мощность, рассеиваемая в этом резисторе, представляет собой полезную выходную мощность или мощность на валу.
Приблизительная эквивалентная схема
Приблизительная эквивалентная схема нарисована только для упрощения наших вычислений путем удаления одного узла. Ветвь шунта смещена в сторону первичного контура. Это было сделано, поскольку падение напряжения между сопротивлением статора и индуктивностью меньше, и нет большой разницы между напряжением питания и индуцированным напряжением. Однако это не подходит по следующим причинам:
Это было сделано, поскольку падение напряжения между сопротивлением статора и индуктивностью меньше, и нет большой разницы между напряжением питания и индуцированным напряжением. Однако это не подходит по следующим причинам:
- Магнитная цепь асинхронного двигателя имеет воздушный зазор, поэтому ток возбуждения больше по сравнению с трансформатором, поэтому следует использовать точную эквивалентную схему.
- Индуктивность ротора и статора у асинхронного двигателя больше.
- В асинхронных двигателях используются распределенные обмотки.
Эту модель можно использовать, если необходимо провести приблизительный анализ для больших двигателей. Для двигателей меньшего размера мы не можем использовать это.
Соотношение мощности эквивалентной цепи
- Входная мощность статора — 3 В 1 I 1 Cos ().
Где, В 1 — приложенное напряжение статора.
I 1 — ток, потребляемый обмоткой статора.
Cos (Ɵ) — статора силового статора. - Потребляемая мощность ротора =
Потребляемая мощность — Потери в меди и стали статора. - Ротор Потери меди = проскальзывание × подводимая мощность к ротору.
- Развиваемая мощность = (1 — с) × входная мощность ротора.

Эквивалентная схема однофазного асинхронного двигателя
Существует разница между однофазной и трехфазной эквивалентными схемами. Схема однофазного асинхронного двигателя описывается теорией двойного вращающегося поля, которая гласит, что:
Стационарное пульсирующее магнитное поле может быть разделено на два вращающихся поля, оба имеют одинаковую величину, но противоположны по направлению.Таким образом, индуцированный чистый крутящий момент равен нулю в состоянии покоя. Здесь прямое вращение называется вращением с проскальзыванием s, а обратное вращение — с проскальзыванием (2 — s). Эквивалентная схема —
В большинстве случаев компонент потерь в сердечнике r 0 не учитывается, поскольку это значение довольно велико и не сильно влияет на расчет.
Здесь Z f показывает прямое сопротивление, а Z b показывает обратное сопротивление.
Кроме того, сумма прямого и обратного скольжения равна 2, поэтому в случае обратного скольжения оно заменяется на (2 — s).
R 1 = Сопротивление обмотки статора.
X 1 = Индуктивное реактивное сопротивление обмотки статора.
X м = Реактивное сопротивление намагничивания.
R 2 ’= Реактивное сопротивление ротора относительно статора.
X 2 ’= Индуктивное реактивное сопротивление ротора относительно статора.
Расчет мощности эквивалентной цепи
- Найдите Z f и Z b .
- Найдите ток статора, который определяется как напряжение статора / полное сопротивление цепи.
- Затем найдите входную мощность, которая определяется как
Напряжение статора × ток статора × Cos ()
Где Ɵ — угол между током статора и напряжением. - Развитая мощность (P g ) — это разница между мощностью прямого поля и мощностью обратного направления. Прямая и обратная мощность определяется мощностью, рассеиваемой на соответствующих резисторах.
- Потери меди в роторе рассчитаны по скольжению × P г .
- Выходная мощность определяется по формуле —
P г — s × P г — Потери вращения.
Потери вращения включают потери на трение, потери на ветер, потери в сердечнике. - КПД можно также рассчитать, разделив выходную мощность на входную.
 Прямая и обратная мощность определяется мощностью, рассеиваемой на соответствующих резисторах.
Прямая и обратная мощность определяется мощностью, рассеиваемой на соответствующих резисторах. Модель динамики трехфазной асинхронной машины, также известной как индукционная машина,
в единицах СИ или о.у.
Представлять ли крутящий момент, приложенный к валу или ротору.
скорость как входной сигнал блока Simulink ® , или чтобы представить вал машины как
Вращающийся механический порт Simscape ™.
Выберите Torque Tm , чтобы указать входной крутящий момент в Н · м или о.е.
а так и выставить порт Тм . Скорость машины
определяется инерцией станка J (для SI
станка) или постоянной инерции H (для пу станка)
и разницей между приложенным механическим крутящим моментом
Tm , и внутренний электромагнитный момент,
Те . Когда скорость положительная, положительный крутящий момент
Когда скорость положительная, положительный крутящий момент
сигнал указывает на режим двигателя, а отрицательный сигнал указывает на генератор
режим.
Выберите Speed w , чтобы указать входную скорость в дюймах.
рад / с или в о.у., и выставить порт w . Машина
скорость навязывается и механическая часть модели (автомат
инерция J ) игнорируется. Используя скорость как
механический ввод позволяет моделировать механическую связь между двумя
машины.
На рисунке показано, как смоделировать жесткое соединение валов в мотор-генераторной установке.
когда в машине 2 не учитывается момент трения.Скорость вывода
машина 1 (двигатель) подключена к входу скорости машины 2 (
генератор), в то время как выход электромагнитного крутящего момента машины 2
Te применяется к механическому входу крутящего момента
Tm станка 1. Коэффициент Kw учитывает
единицы скорости обеих машин (рад / с или о.е.) и передаточное число коробки передач w2 / w1.
Коэффициент KT учитывает единицы крутящего момента обеих машин (Н.м
или пу) и номиналы машин. Также из-за инерции J2
игнорируется в машине 2, J2 относится к скорости
машина 1 и должна быть добавлена к инерции машины 1
Дж1 .
Выберите Механический вращающийся порт , чтобы открыть механический вращающийся порт Simscape, S , который
позволяет соединять вал машины с другими блоками Simscape, имеющими механические порты вращения.
На рисунке показано, как подключить идеальный крутящий момент
Исходный блок из библиотеки Simscape на вал машины для представления машины в
в режиме двигателя или в режиме генератора, когда частота вращения ротора
положительный.
Асинхронный двигатель | КСБ
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе создается током намагничивания, передаваемым через предоставленную электрическую энергию. Асинхронные двигатели характеризуются скольжением, т.е.е. зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля питающего напряжения.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор состоит из распределенных катушек, которые индуцируют напряжение в стержнях ротора (см. Индукция) посредством вращающегося магнитного поля. Это приводит к сильному протеканию тока в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм.Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора подключается к переменным резисторам, обычно используемым в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает плавный процесс пуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Такая конструкция обеспечивает плавный процесс пуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одно- или двухпроводных шин, закороченных на концах кольцевым проводником.Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис.1 Асинхронный двигатель
Рис.1 Асинхронный двигатель: Асинхронный двигатель в разрезе
В отношении контакта с водой различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором. См. Рис.2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||||
|---|---|---|---|---|---|
| Ротор | Обмотка | Сухой корпус | Мокрый корпус (погружной 903 9035 Сухой двигатель) | Сухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель |
| Влажный (двигатель с мокрым ротором) | Сухой двигатель (герметичный двигатель) | Двигатель с мокрым ротором насоса с мокрым ротором | Полностью погружной двигатель (заполненный жидкостью) | ||
Рис. 2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
Сухой двигатель имеет различные типы защиты от проникновения воды (см. Тип защиты).
Погружной электродвигатель частично или полностью погружен в воду и обычно устанавливается в вертикальном положении. Тепло, выделяемое двигателем, передается непосредственно окружающей обрабатываемой жидкости. Его отличительной особенностью является корпус двигателя, который смачивается снаружи (см. Погружной электронасос).Внутреннее смачивание и глубина погружения отличают погружные двигатели с масляным или воздушным наполнением для малых и средних глубин погружения (погружные насосы для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, находящейся внутри и снаружи. Они рассчитаны на любую глубину погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные.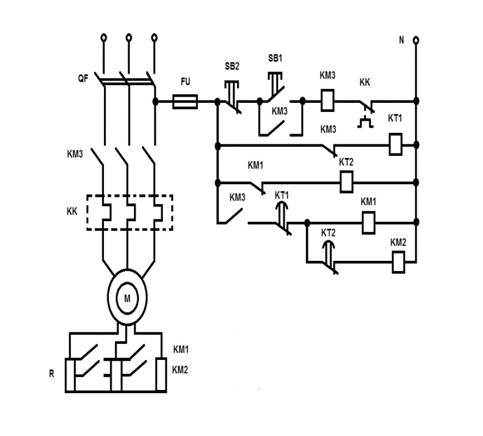 Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Двигатель с мокрым ротором заполнен жидкостью и, в отличие от погружного двигателя, его корпус не смачивается снаружи. Он имеет подшипники с жидкостной смазкой (см. Подшипники скольжения) и вместе с насосом образует герметичный насосный агрегат (насос с мокрым ротором). Двигатель может быть оснащен мокрой обмоткой статора или, в сочетании с корпусом, сухой обмоткой, и часто является двигателем, который выбирают для циркуляционных насосов.
Асинхронные двигатели — Руководство по электрическому монтажу
Асинхронный (т.е. асинхронный) двигатель прочен и надежен и очень широко используется. 95% двигателей, установленных по всему миру, являются асинхронными. Следовательно, защита этих двигателей имеет большое значение во многих областях применения.
Введение
Асинхронные двигатели используются в самых разных областях. Вот несколько примеров машин с приводом:
Вот несколько примеров машин с приводом:
- кондиционеры воздуха,
- чиллеры,
- лифтов,
- вентиляторы и нагнетатели,
- пожарный насос,
- центробежные насосы,
- компрессоров,
- дробилки,
- конвейеры,
- подъемников и кранов,
- …
Последствия отказа двигателя из-за неправильной защиты или невозможности работы схемы управления могут включать следующее:
- Для лиц:
- Удушье из-за блокировки вентиляции двигателя
- Удар электрическим током из-за нарушения изоляции в двигателе
- Авария из-за отсутствия остановки двигателя из-за отказа цепи управления
- Для ведомой машины и процесса:,
- Муфты валов, оси, приводные ремни,… повреждены из-за остановки ротора
- Пострадавшая продукция
- Отложенное производство
- Для самого мотора:
- Перегорели обмотки двигателя из-за остановки ротора
- Стоимость ремонта
- Стоимость замены
Таким образом, безопасность людей и товаров, а также уровень надежности и доступности во многом зависят от выбора средств защиты.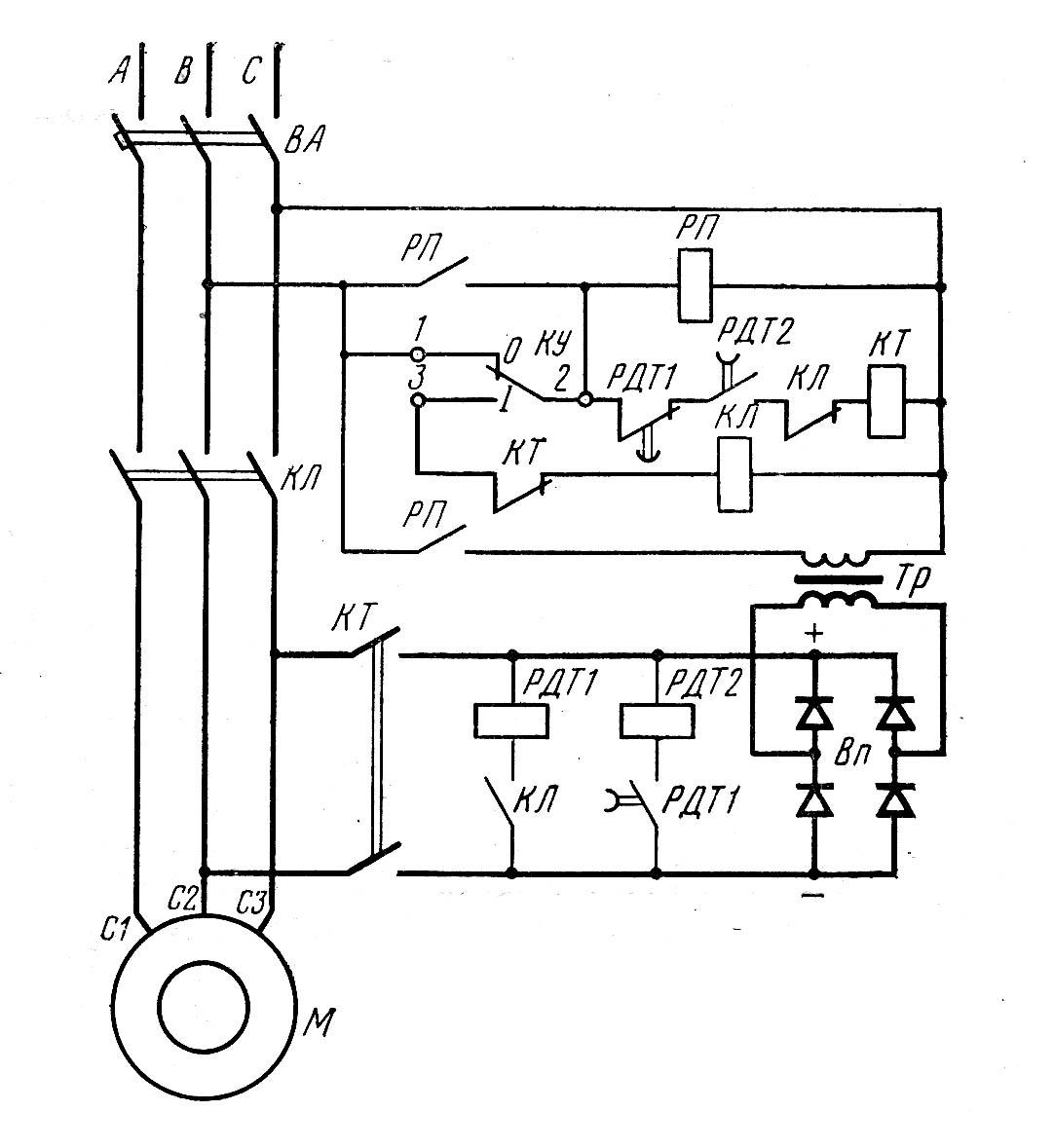
С экономической точки зрения необходимо учитывать общую стоимость отказа. Эта стоимость увеличивается с размером двигателя и трудностями доступа и замены. Потери производства — еще один, очевидно, важный фактор.
Особенности характеристик двигателя влияют на цепи питания, необходимые для удовлетворительной работы.
Цепь питания двигателя имеет определенные ограничения, которые обычно не встречаются в других (общих) схемах распределения.Это связано с особыми характеристиками двигателей, напрямую подключенных к линии, таких как:
- Высокий пусковой ток (см. Рис. N74), который в основном является реактивным и поэтому может быть причиной значительного падения напряжения
- Количество и частота пусковых операций в целом высокие
- Высокий пусковой ток означает, что устройства защиты двигателя от перегрузки должны иметь рабочие характеристики, предотвращающие срабатывание во время периода пуска.
Рис. N74 — Характеристики прямого пускового тока асинхронного двигателя
Эквивалентная схема асинхронного двигателя
Асинхронный двигатель — это асинхронный двигатель, т.
 Е. Его скорость изменяется при изменении нагрузки. Он всегда работает с запаздывающим коэффициентом мощности. Принцип работы асинхронного двигателя аналогичен трансформатору, т. Е. На электромагнитной индукции.
Е. Его скорость изменяется при изменении нагрузки. Он всегда работает с запаздывающим коэффициентом мощности. Принцип работы асинхронного двигателя аналогичен трансформатору, т. Е. На электромагнитной индукции.
Эквивалентная схема асинхронного двигателя аналогична эквивалентной схеме трансформатора, потому что энергия передается от статора к ротору, так как работа трансформатора от первичной ко вторичной обмотке важна.Эквивалентная схема обеспечивает рабочие характеристики асинхронного двигателя. Данные, полученные из эквивалентной схемы, можно использовать для расчета КПД, крутящего момента, потерь, мощности ротора и т. Д. При представлении эквивалентной схемы используются все величины, относящиеся к каждой фазе.
Эквивалентная цепь асинхронного двигателя:
Различные параметры, используемые для разработки эквивалентной схемы асинхронного двигателя:
- R 1 и X 1 : сопротивление обмотки статора и реактивное сопротивление рассеяния.
- R 2 & X 2 : Сопротивление обмотки ротора и реактивное сопротивление утечки в состоянии покоя (т. Е. S = 1).
- sX 2 : Реактивное сопротивление утечки ротора при скольжении s (в рабочем состоянии).
- R o : Сопротивление ветви без нагрузки и несет рабочую составляющую (I w ) тока холостого хода. I o учитывают потери на холостом ходу.
- X o : Реактивное сопротивление ветви без нагрузки и несет намагничивающую составляющую (I µ ) холостого хода для создания магнитного потока.
- E 1 и sE 2 : ЭДС, индуцированная статором, и ЭДС, индуцированная ротором при скольжении s.

Из приведенных выше параметров эквивалентную схему асинхронного двигателя можно составить как
рассмотрим собственно схему ротора двигателя.
Из приведенной выше диаграммы ток ротора I
2 определяется как,
Здесь мы знаем, что входная мощность ротора, P
2 , представляет собой сумму потерь в меди в роторе P c и развиваемой механической мощности P m . Таким образом, можно представить электрический эквивалент развиваемой механической мощности следующим образом:
Таким образом, можно представить электрический эквивалент развиваемой механической мощности следующим образом:
Чтобы показать эквивалентную механическую нагрузку (преобразование механической энергии) в цепи ротора. Эквивалентная схема двигателя может быть изменена как,
Теперь перенесите параметры со стороны ротора на сторону статора. При смещении параметров стороны ротора в сторону статора мы должны разделить его на значение «K» (где K = отношение эффективного числа оборотов ротора к числу оборотов статора на фазу), за исключением тока ротора, где он умножается на «K».Когда параметры ротора сдвигаются, они могут быть представлены как,
- R ‘ 2 = Сопротивление ротора относительно статора.
- X ‘ 2 = Реактивное сопротивление ротора относительно статора.
- E ‘ 2 = ЭДС, индуцированная ротором. относится к статору.
- I ‘ 2 = ток ротора относительно статора.
- R ‘ L = Механическая нагрузка ротора, эквивалентная статору.

Эквивалентная схема может быть дополнительно модифицирована, как показано ниже, и она известна как точная эквивалентная схема применительно к статору.
Где,
Таким образом, приблизительная эквивалентная схема получается путем смещения ответвления шунта (состоящего из R
01 и X 01 ) к клеммам питания, как показано на рисунке ниже. Это упрощение позволит упростить вычисления.
Следовательно, полное сопротивление, относящееся к стороне статора, составляет
Точно так же полное реактивное сопротивление, относящееся к стороне статора, составляет
Расчет мощности ротора и крутящего момента с использованием эквивалентной схемы:
Из эквивалентной схемы мы можем получить выражения для крутящего момента T и выходной мощности ротора P
o двигателя.
Из приведенной выше диаграммы мощность, потребляемая P
i на ротор, равна,
Мы можем написать,
P i = SP i + P i — SP i (добавляя и вычитая SP i )
P i = SP i + ( 1 — S) P i
Это выражение показывает, что входная мощность ротора P i представляет собой сумму падения напряжения в цепи ротора из-за его сопротивления, как SP i , и эквивалентного сопротивления, представляющего механическую нагрузку.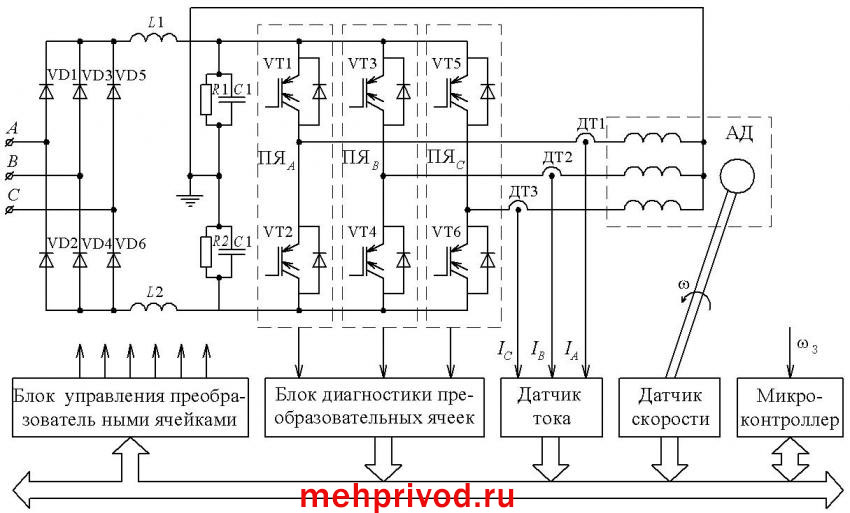 (1 — S) П и .
(1 — S) П и .
Исходя из вышеизложенного, мощность ротора P o определяется выражением
Мы знаем, что ток ротора I
2 ,
Подставляя значение I
2 в уравнение (1), мы получаем
Мы знаем, что вращающееся магнитное поле асинхронного двигателя, создаваемое обмоткой статора, вращается с синхронной скоростью N
с . Тогда крутящий момент, приложенный к ротору из-за вращающегося магнитного поля статора, будет T. Теперь мощность, передаваемая от статора к ротору, равна,
Приравнивая уравнения (2) и (3), получаем,
Таким образом, уравнение крутящего момента выводится из эквивалентной схемы, и различные расчеты производительности могут быть выполнены из приведенных выше уравнений.
Схемы электродвигателей
Уважаемый г-н электрик: Где я могу найти схемы однофазных электродвигателей?
Ответ: Ниже я собрал группу схем однофазных внутренних электродвигателей и клеммных соединений.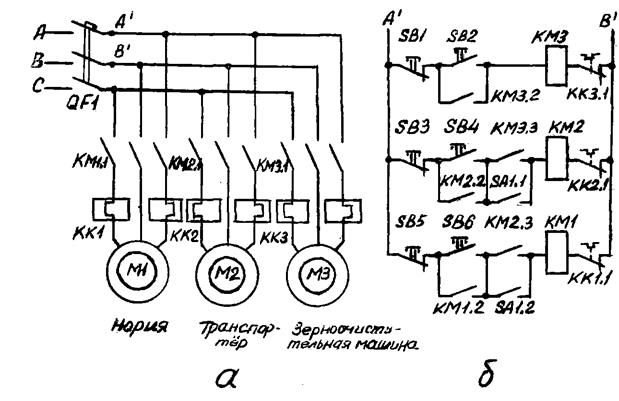 Внизу поста также видео о шунтирующих двигателях постоянного тока. ПРИМЕЧАНИЕ. Некоторые текстовые ссылки ниже ведут к соответствующим продуктам на Amazon и Ebay. Как партнер Amazon я зарабатываю на соответствующих покупках.
Внизу поста также видео о шунтирующих двигателях постоянного тока. ПРИМЕЧАНИЕ. Некоторые текстовые ссылки ниже ведут к соответствующим продуктам на Amazon и Ebay. Как партнер Amazon я зарабатываю на соответствующих покупках.
РАЗЪЕМЫ КОНДЕНСАТОРА ДЛЯ ОДНОФАЗНЫХ ДВИГАТЕЛЕЙ
Клеммы вращения двигателя — одно напряжение
| ВРАЩЕНИЕ | L1 | L2 |
|---|---|---|
| По часовой стрелке | 1,5 | 4,8 |
| Против часовой стрелки | 1,8 | 4,5 |
Вращение двигателя — двойное напряжение, только основная обмотка
| НАПРЯЖЕНИЕ | ВРАЩЕНИЕ | L1 | L2 | СОЕДИНЕНИЕ |
|---|---|---|---|---|
| Высокая | CCW | 1 | 4, 5 | 2 и 3 и 8 |
| Высокая | CW | 1 | 4, 8 | 2 и 3 и 5 |
| Низкая | CCW | 1, 3, 8 | 2, 4, 5 | — |
| Низкий | CW | 1, 3, 5 | 2, 4, 8 | — |
Вращение двигателя — двойное напряжение, основная и вспомогательная обмотки
| НАПРЯЖЕНИЕ | ВРАЩЕНИЕ | L1 | L2 | СОЕДИНЕНИЕ |
|---|---|---|---|---|
| Высокая | CCW | 1, 8 | 4, 5 | 2 и 3, 6 и 7 |
| Высокая | CW | 1, 5 | 4, 8 | 2 и 3, 6 и 7 |
| Низкая | CCW | 1, 3, 6, 8 | 2, 4, 5, 7 | — |
| Низкий | CW | 1, 3, 5, 7 | 2, 4, 6, 8 | — |
Подключения переключателя вспомогательной обмотки должны быть выполнены таким образом, чтобы обе вспомогательные обмотки были обесточены при размыкании переключателя.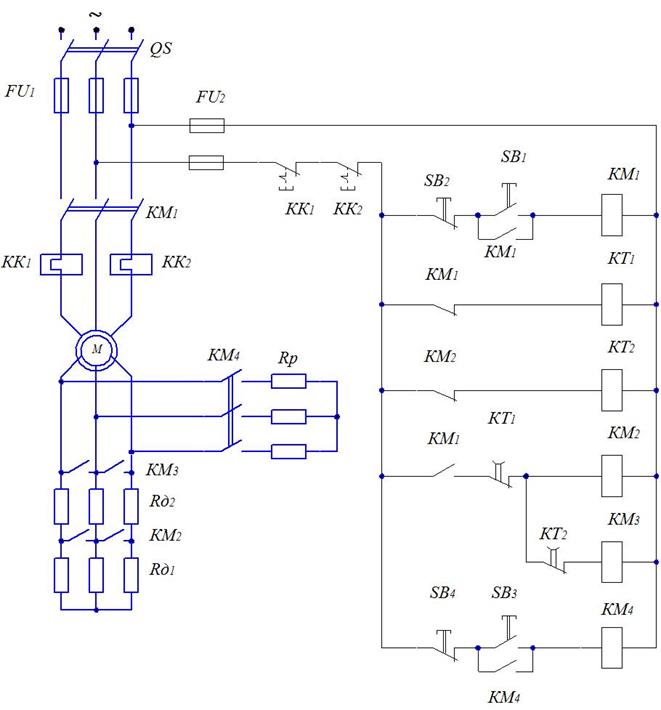
СХЕМА ЭЛЕКТРОДВИГАТЕЛЯ
Внутренние электрические схемы электродвигателей малой и малой мощности
Индукция с разделенной фазой
Постоянно подключенный конденсатор с разделенной фазой
Запуск с разделенным фазным конденсатором
Работа с разделенным фазным конденсатором
Работа с другим разделенным фазным конденсатором
Индукция в работе с разделенным фазным конденсатором (обратимая)
Запуск реактора
Однозначный конденсатор с разделенной фазой
Отталкивание
Индукция начала отталкивания (обратимая)
Затененный полюс
Каркасный затененный полюс
Универсальный
Асинхронный электродвигатель с расщепленной фазой.
Асинхронный электродвигатель с расщепленной фазой оснащен короткозамкнутым ротором для работы с постоянной скоростью и имеет пусковую обмотку с высоким сопротивлением, которая физически смещена в статоре от основной обмотки.
Последовательно с пусковой обмоткой находится центробежный пусковой выключатель, который размыкает пусковую цепь, когда двигатель достигает примерно 75-80 процентов синхронной скорости.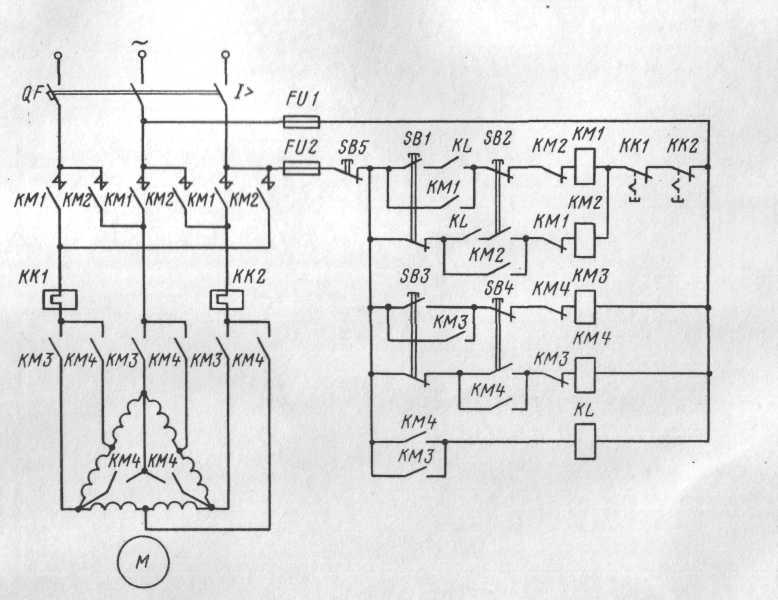 Функция пускового переключателя заключается в том, чтобы предотвратить потребление двигателем чрезмерного тока, а также защитить пусковую обмотку от чрезмерного нагрева.Двигатель может быть запущен в любом направлении путем реверсирования основной или вспомогательной (пусковой) обмотки.
Функция пускового переключателя заключается в том, чтобы предотвратить потребление двигателем чрезмерного тока, а также защитить пусковую обмотку от чрезмерного нагрева.Двигатель может быть запущен в любом направлении путем реверсирования основной или вспомогательной (пусковой) обмотки.
Эти двигатели подходят для масляных горелок, воздуходувок, бизнес-машин, полировальных машин, шлифовальных машин , и т. Д.
Электродвигатель с постоянно подключенным конденсатором с расщепленной фазой.
Электродвигатель с постоянно подключенным конденсатором с расщепленной фазой также имеет короткозамкнутый ротор с основной и пусковой обмотками. Конденсатор постоянно включен последовательно со вспомогательной обмоткой.Двигатели этого типа запускаются и работают с фиксированным значением емкости последовательно с пусковой обмоткой.
Двигатель получает свой пусковой крутящий момент от вращающегося магнитного поля, создаваемого двумя физически смещенными обмотками статора. Основная обмотка подключается непосредственно к линии, а вспомогательная или пусковая обмотка подключается к линии через конденсатор , обеспечивающий электрическое смещение фаз.
Основная обмотка подключается непосредственно к линии, а вспомогательная или пусковая обмотка подключается к линии через конденсатор , обеспечивающий электрическое смещение фаз.
Этот двигатель подходит для приводов с прямым подключением, требующих низкого пускового момента, таких как вентиляторы, нагнетатели, некоторые насосы и т. Д.
Электродвигатель запуска конденсатора с расщепленной фазой.
Электродвигатель с пусковым механизмом с разделенным фазным конденсатором можно определить как электродвигатель с расщепленной фазой, в котором конденсатор включен последовательно со вспомогательной обмоткой. Вспомогательная цепь размыкается центробежным переключателем, когда двигатель достигает 70-80 процентов синхронной скорости.
Также известен как асинхронный двигатель с конденсаторным пуском. Ротор представляет собой беличью клетку. Основная обмотка подключается непосредственно через линию, в то время как вспомогательная или пусковая обмотка подключается через конденсатор, который может быть включен в схему через трансформатор с обмоткой соответствующей конструкции и конденсатором таких значений, что две обмотки будут находиться на расстоянии примерно 90 градусов друг от друга. .
.
Двигатели этого типа подходят для систем кондиционирования и охлаждения, вентиляторы с ременным приводом, и т. Д.
Электродвигатель, работающий через конденсатор, разделенный фазой
Электродвигатель, работающий через конденсатор, разделенный фазой. A Конденсатор с разделенной фазой Электродвигатель рабочего типа имеет рабочий конденсатор, постоянно включенный последовательно со вспомогательной обмоткой. Пусковой конденсатор включен параллельно рабочему конденсатору только во время пускового периода. Двигатель запускается при замкнутом центробежном выключателе.
НАЖМИТЕ ЗДЕСЬ, чтобы узнать о электродвигателях и принадлежностях Amazon
Когда двигатель достигает 70–80 процентов синхронной скорости, пусковой выключатель размыкается и отключает пусковой конденсатор. Рабочий конденсатор обычно представляет собой масляный конденсатор с разнесенными бумажными промежутками, обычно рассчитанный на 330 В переменного тока для непрерывной работы. Они могут варьироваться от 3 до 16 микрофарад.
Они могут варьироваться от 3 до 16 микрофарад.
Пусковой конденсатор обычно электролитического типа и может находиться в диапазоне от 80 до 300 мкФ для двигателей на 110 вольт и частотой 60 Гц.
Эти двигатели подходят для применений, требующих высокого пускового момента, таких как компрессоры, нагруженные конвейеры, поршневые насосы, холодильные компрессоры и т. Д.
Другой электродвигатель, работающий на конденсаторе с расщепленной фазой.
Другой тип электродвигателя типа «Split Phase Capacitor Run » использует блок конденсаторного трансформатора и относится к типу с короткозамкнутым ротором с расщепленной фазой, в котором основная и вспомогательная обмотки физически смещены в статоре. В нем используется однополюсный двухпозиционный переключатель для подачи высокого напряжения на конденсатор во время запуска.
После того, как двигатель достигнет скорости от 70 до 80 процентов от синхронной, передаточный переключатель срабатывает для изменения отводов напряжения на трансформаторе.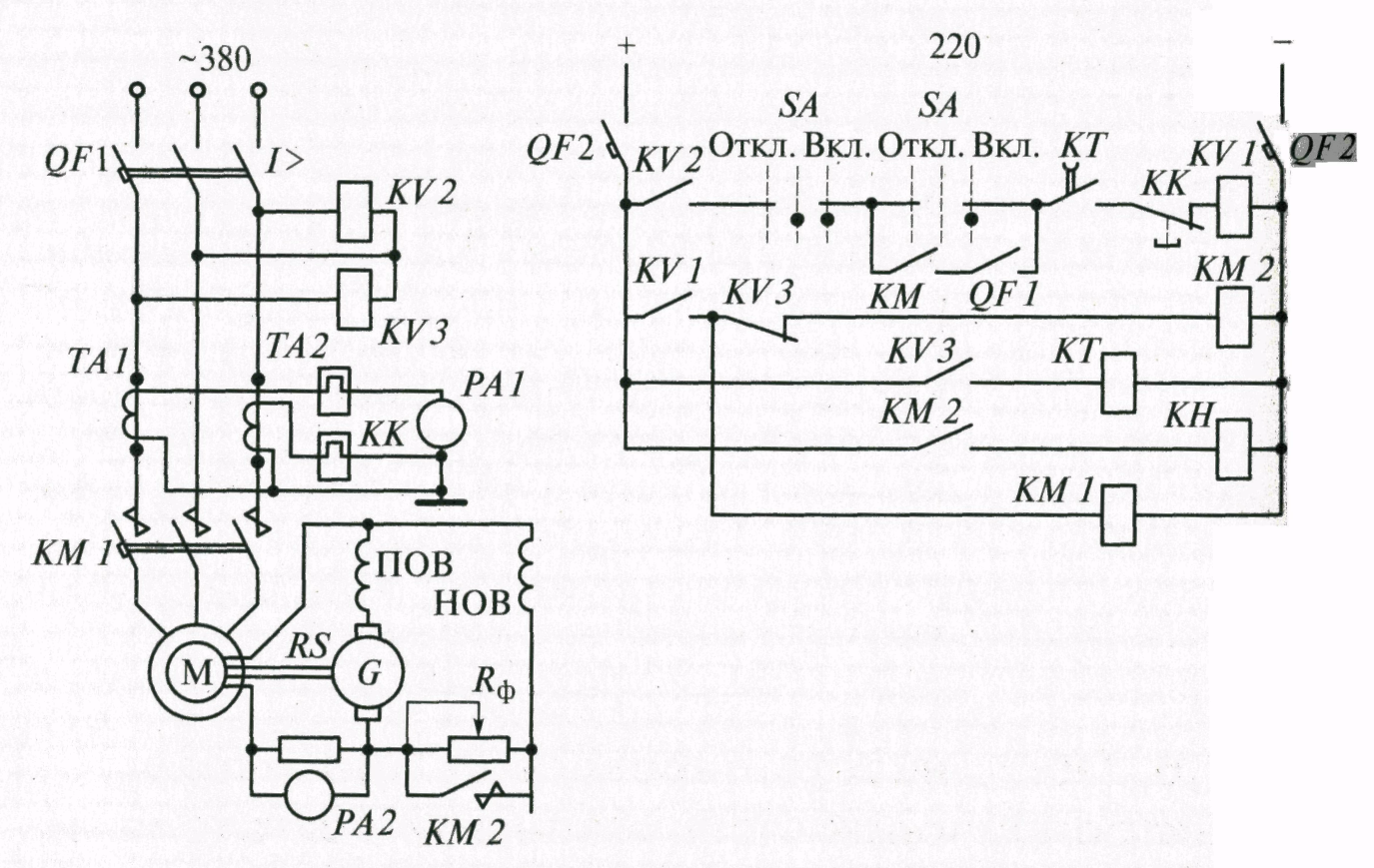 Напряжение, подаваемое на конденсатор с помощью трансформатора, может варьироваться от 600 до 800 вольт во время запуска. Для непрерывной работы выдается около 350 вольт.
Напряжение, подаваемое на конденсатор с помощью трансформатора, может варьироваться от 600 до 800 вольт во время запуска. Для непрерывной работы выдается около 350 вольт.
Подходит для применений с высоким пусковым моментом, таких как компрессоры , нагруженные конвейеры, поршневые насосы, холодильные компрессоры и т. Д.
Асинхронный электродвигатель, работающий на разделенных фазах, конденсаторный (реверсивный).
Асинхронный электродвигатель, работающий с разделенным фазным конденсатором (реверсивный). Когда реверсивный переключатель находится в положении «B», вспомогательная обмотка становится основной обмоткой, а основная обмотка становится вспомогательной. В положении «A» обмотки работают, как показано на схеме.
В двигателях с расщепленной фазой смена обмотки заставляет двигатель работать в обратном направлении. Обе обмотки должны быть идентичны по сечению провода и количеству витков.
Используйте это, когда вам нужен реверсивный двигатель конденсаторного типа с переменным током и высоким крутящим моментом.
Электродвигатель с разделенной фазой и запуском реактора.
Асинхронный электродвигатель с разделенной фазой и пуском реактора. Этот двигатель снабжен вспомогательной обмоткой, смещенной в магнитном положении относительно основной обмотки и включенной параллельно ей. Реактор снижает пусковой ток и увеличивает запаздывание по току в основной обмотке.
При примерно 75% синхронной скорости пусковой выключатель срабатывает, чтобы шунтировать реактор, отключая вспомогательную обмотку от цепи.
Это двигатель постоянной скорости, который лучше всего подходит для легких работающих машин, таких как вентиляторы, небольшие воздуходувки, бизнес-машины, шлифовальные машины и т. Д.
Электродвигатель с однофазным конденсатором, разделенный фазой (тип двойного напряжения).
Электродвигатель с однофазным конденсатором, разделенный фазой (тип двойного напряжения). Этот двигатель имеет две одинаковые основные обмотки, которые могут быть подключены последовательно или параллельно.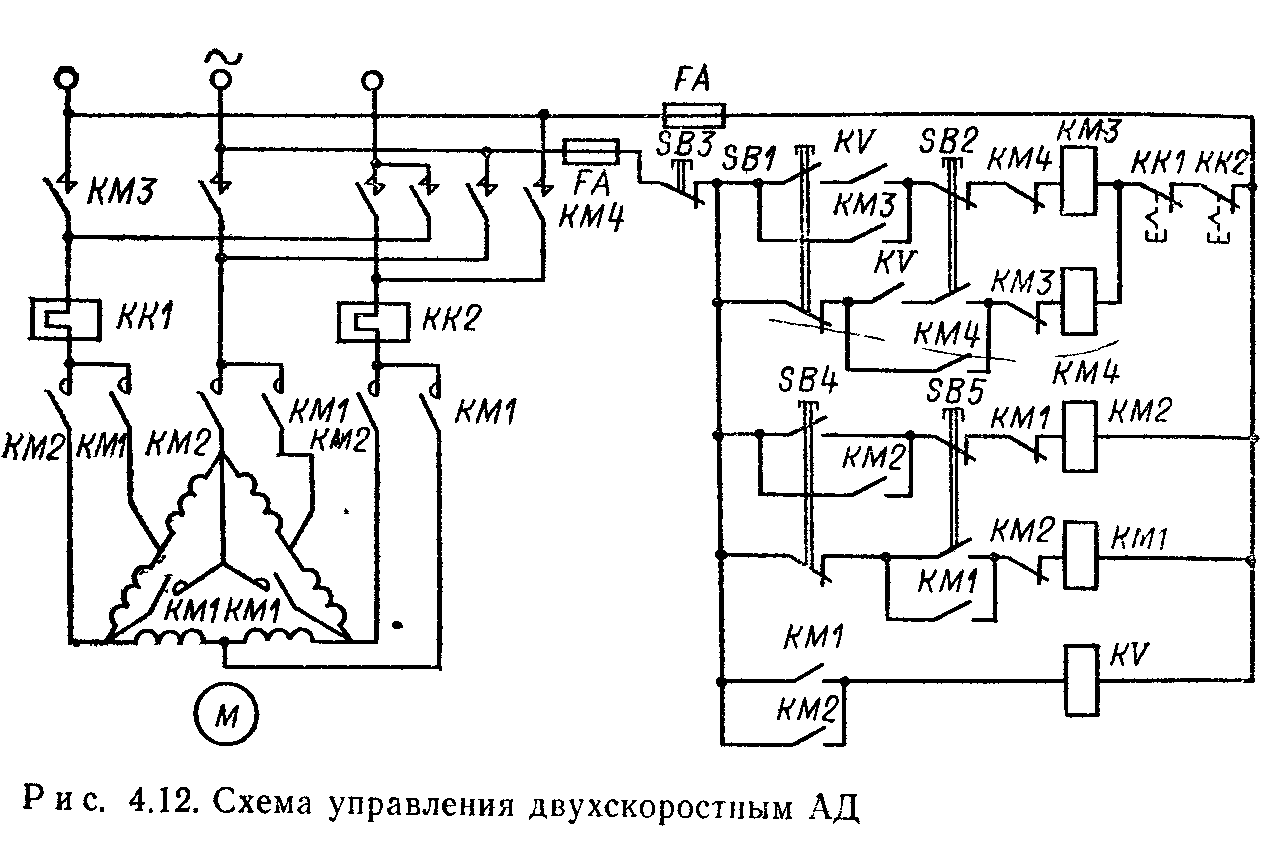 При параллельном соединении основных обмоток напряжение в сети обычно составляет 240 В. При последовательном соединении основных обмоток используется напряжение 120 В.
При параллельном соединении основных обмоток напряжение в сети обычно составляет 240 В. При последовательном соединении основных обмоток используется напряжение 120 В.
Вспомогательная пусковая обмотка смещена в пространстве от основной обмотки на 90 градусов. Он также имеет центробежный выключатель и пусковой конденсатор. Обмотка такого типа дает только половину пускового момента при 120 вольт, чем при подключении на 240 вольт.
Электродвигатель отталкивания.
Отталкивающий электродвигатель по определению является однофазным двигателем, который имеет обмотку статора, предназначенную для подключения к источнику энергии, и обмотку ротора, подключенную к коммутатору.Щетки и коммутаторы закорочены и размещены так, чтобы магнитная ось обмотки ротора была наклонена к магнитной оси обмотки статора.
Он имеет изменяющуюся характеристику скорости, высокий пусковой момент и умеренный пусковой ток. Благодаря низкому коэффициенту мощности, за исключением высоких скоростей, он может быть преобразован в двигатель с компенсированным отталкиванием, у которого есть еще один набор щеток, расположенный посередине между короткозамкнутым набором, и этот дополнительный набор соединен последовательно с обмотками статора.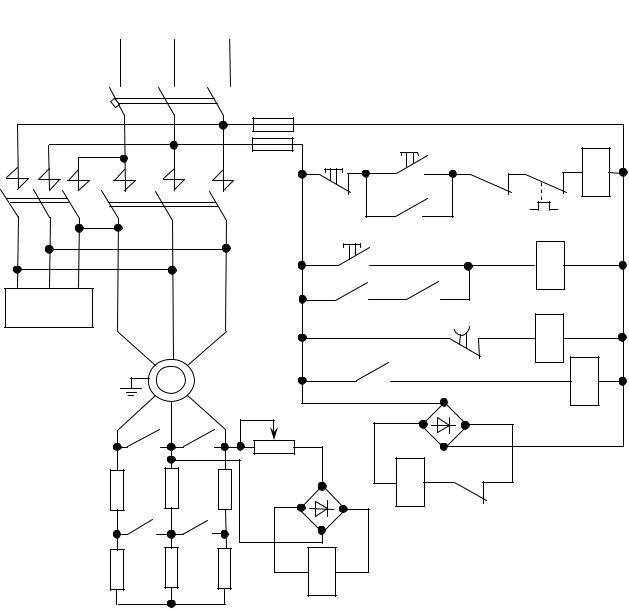
Электродвигатель индукционный с пуском отталкивания (реверсивный).
Асинхронный электродвигатель с отталкивающим пуском (реверсивный) Асинхронный электродвигатель с отталкивающим запуском — это однофазный двигатель, имеющий ту же обмотку, что и отталкивающий двигатель, но при заданной скорости обмотка ротора замкнута накоротко или иным образом соединена, чтобы дать эквивалент обмотка беличьей клетки.
Этот двигатель запускается как отталкивающий двигатель, но работает как асинхронный двигатель с постоянной скоростью.Он имеет однофазную обмотку с распределенным возбуждением, ось щеток которой смещена относительно оси обмотки возбуждения. Якорь имеет изолированную обмотку. Ток, индуцированный в якоре, переносится щетками и коммутатором, что приводит к высокому пусковому моменту.
Когда достигается почти синхронная скорость, коммутатор замыкается накоротко, так что якорь по своим функциям аналогичен якорю с короткозамкнутым ротором. На схеме изображен реверсивный тип, в котором две обмотки статора смещены, как показано. Реверс двигателя достигается путем перестановки соединений обмотки возбуждения.
Реверс двигателя достигается путем перестановки соединений обмотки возбуждения.
Электродвигатель с экранированными полюсами.
Электродвигатель с экранированными полюсами — это однофазный асинхронный двигатель, снабженный вспомогательной короткозамкнутой обмоткой или обмоткой, смещенной в магнитном положении относительно основной обмотки. Используется несколько различных методов строительства, но основной принцип тот же.
Затеняющая катушка состоит из медных перемычек с низким сопротивлением, встроенных с одной стороны каждого полюса статора и используемых для обеспечения необходимого пускового момента.Когда ток увеличивается в основных катушках, в затеняющих катушках индуцируется ток, который противодействует магнитному полю, которое создается в части полюсных наконечников, которые они окружают.
Когда ток основной катушки уменьшается, ток в затеняющей катушке также уменьшается до тех пор, пока полюсные наконечники не будут намагничены равномерно. По мере того, как ток основной катушки и магнитный поток полюсного наконечника продолжают уменьшаться, ток в экранирующих катушках меняется на противоположный и стремится поддерживать магнитный поток в части полюсных наконечников.
По мере того, как ток основной катушки и магнитный поток полюсного наконечника продолжают уменьшаться, ток в экранирующих катушках меняется на противоположный и стремится поддерживать магнитный поток в части полюсных наконечников.
Когда ток основной катушки падает до нуля, ток все еще течет в затеняющих катушках, создавая магнитный эффект, который заставляет катушки создавать вращающееся магнитное поле, вызывающее самозапуск двигателя.
Используется там, где требования к питанию невелики, например, в часах, приборах, фенах , маленьких вентиляторах и т. Д.
Каркасный электродвигатель с экранированными полюсами
Каркасный электродвигатель с экранированными полюсами. Электродвигатель с экранированными полюсами каркасного типа разработан для приложений, в которых требования к мощности очень малы. Цепь возбуждения с ее обмоткой построена вокруг обычного ротора с короткозамкнутым ротором и состоит из перфораторов, которые поочередно уложены друг на друга, образуя перекрывающиеся соединения, таким же образом, как собираются сердечники небольших трансформаторов.
Такие двигатели могут работать только на переменном токе, они просты в конструкции, дешевы и чрезвычайно прочны и надежны. Однако их основными ограничениями являются низкий КПД и низкий пусковой и рабочий крутящий момент.
Электродвигатель с экранированными полюсами не является реверсивным, если на каждой стороне полюса не предусмотрены экранирующие катушки и не предусмотрены средства для размыкания одной и замыкания другой катушки. По своей сути высокое скольжение двигателя с экранированными полюсами позволяет удобно получать изменение скорости при нагрузке вентилятора, например, за счет снижения напряжения.
НАЖМИТЕ ЗДЕСЬ, чтобы узнать о ручных пускателях двигателей на Ebay
Универсальный электродвигатель.
Универсальный электродвигатель разработан для работы от переменного или постоянного тока (AC / DC). Это двигатель с серийным заводом. Он снабжен обмоткой возбуждения на статоре, которая последовательно соединена с коммутирующей обмоткой на роторе. Обычно производится с дробными размерами в лошадиных силах.
Обычно производится с дробными размерами в лошадиных силах.
Скорость вращения при полной нагрузке обычно составляет от 5000 до 10 000 об / мин, а скорость холостого хода — от 12 000 до 18 000 об / мин.Типичное применение — портативные инструменты, офисная техника, электрические чистящие средства, кухонная техника, швейные машины и т. Д.
Скорость универсальных двигателей можно регулировать, подключив последовательно к двигателю сопротивление соответствующего значения. Это делает его подходящим для таких приложений, как швейные машины, которые работают в диапазоне скоростей. Универсальные двигатели могут быть как компенсированными, так и некомпенсированными, причем последний тип используется только для более высоких скоростей и более низких номиналов.
Реверс этого двигателя достигается путем замены проводов щеткодержателя, при этом якорь подключен к нейтрали.В трехпроводном универсальном электродвигателе реверсивного типа с разделенным последовательным соединением одна обмотка статора используется для получения одного направления, а другая обмотка статора — для получения другого направления, при этом в цепи одновременно находится только одна обмотка статора.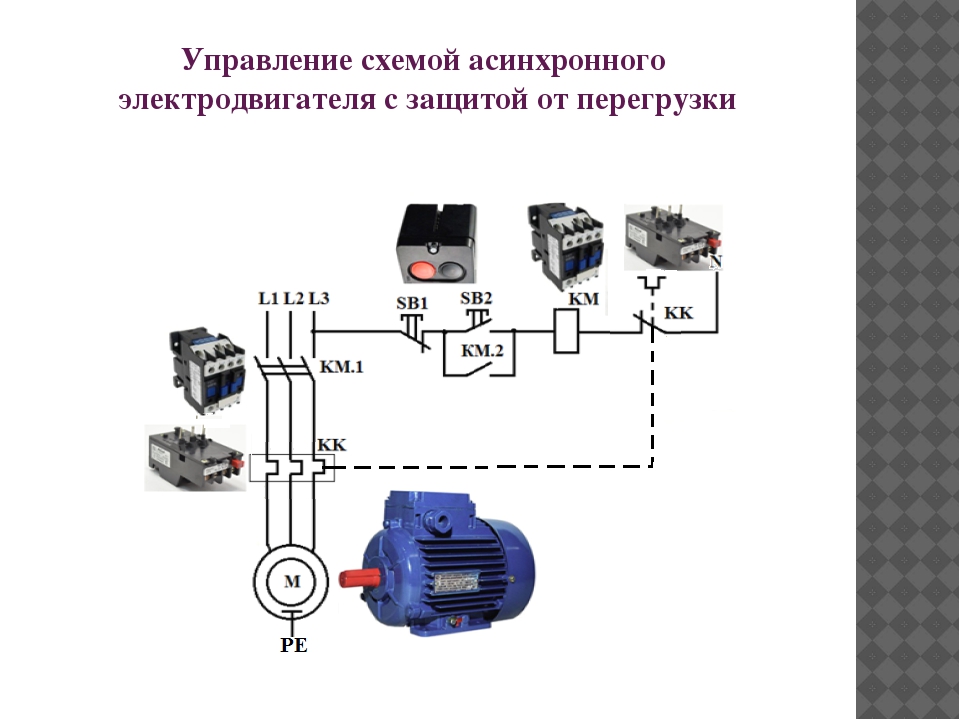 Соединения якоря должны находиться в нейтральном положении, чтобы обеспечить удовлетворительную работу в обоих направлениях вращения.
Соединения якоря должны находиться в нейтральном положении, чтобы обеспечить удовлетворительную работу в обоих направлениях вращения.
РАЗМЕР РАМЫ
Ниже приведена таблица размеров корпуса двигателя, которую я нашел в старой книге.
Таблица размеров электродвигателя
Эту информацию о монтажных размерах двигателя я нашел в той же книге.
Таблица монтажных размеров электродвигателя NEMA C и J-Face.
НЕКОТОРЫЕ СВЕДЕНИЯ О ДВИГАТЕЛЯХ ПОСТОЯННОГО ТОКА
Схема электрических соединений двигателя постоянного тока
Исчерпывающую информацию об эксплуатации, ремонте и истории электродвигателей можно найти в сообщении на отраслевом веб-сайте. Когда вы попадете туда, нажмите «Статьи» или прокрутите вниз, чтобы найти отличную информацию об электродвигателях. Существует также глоссарий терминологии по электродвигателям.