
Замкнутая система — автоматическое управление
Замкнутая система — автоматическое управление
Cтраница 1
Замкнутая система автоматического управления содержит вычислительное устройство, вырабатывающее дискретные команды. Объект управления представляет собой фильтр нижних частот, на который действует белый шум.
[1]
Замкнутая система автоматического управления может быть представлена несколькими операционными блоками, которые связывают отдельные переменные величины системы, являющиеся функциями времени. Каждый отдельный блок представляется дифференциальным уравнением.
[2]
Замкнутые системы автоматического управления различаются по назначению: системы поддержания постоянства регулируемой переменной, системы программного управления и следящие системы.
[3]
Замкнутые системы автоматического управления работают всегда в реальном масштабе времени и правильность выполнения целевой функции контролируется с помощью обратных связей. По цепям обратной связи в систему управления непрерывно поступают сигналы о необходимости внесения корректировки в ход процесса.
По цепям обратной связи в систему управления непрерывно поступают сигналы о необходимости внесения корректировки в ход процесса.
[4]
Замкнутые системы автоматического управления являются более совершенными, чем разомкнутые, но в то же время и более сложными.
[5]
Замкнутыми системами автоматического управления называются системы, имеющие замкнутый цикл управления.
[6]
Пример замкнутой системы автоматического управления, выполняющей вторую функцию, показан на рис. 1 — 2, где представлен генератор постоянного тока с поддержанием напряжения за счет отрицательной обратной связи по напряжению. При возрастании нагрузки сигнал обратной связи а ВЫх падает, а сигнал и на входе преобразователя П возрастает.
[7]
Пример замкнутой системы автоматического управления, выполняющей вторую функцию, показан на рис. 1 — 2, где представлен генератор постоянного тока с поддержанием напряжения за счет отрицательной обратной связи по напряжению. Эта обратная связь связывает выходную величину иВЬ1х с входной [ / вх. При возрастании нагрузки сигнал обратной связи а Вых падает, а сигнал и на входе преобразователя П возрастает.
1 — 2, где представлен генератор постоянного тока с поддержанием напряжения за счет отрицательной обратной связи по напряжению. Эта обратная связь связывает выходную величину иВЬ1х с входной [ / вх. При возрастании нагрузки сигнал обратной связи а Вых падает, а сигнал и на входе преобразователя П возрастает.
[8]
Такую замкнутую систему автоматического управления называют системой автоматического регулирования.
[9]
В замкнутых системах автоматического управления ( рис. 18 — 9) или, как их иногда называют, системах автоматического регулирования имеется обратная связь с выхода — на вход. Действие такой системы основано на сравнении выходной величины со входной ( или с образцовым, заранее установленным значением) и выработке управляющих сигналов, соответствующих результату этого сравнения. Сравнение входной и выходной величин осуществляется специальным измерительным элементом ИЗ.
[11]
При анализе замкнутых систем автоматического управления, содержащих стохастические нелинейности, неизбежны трудности, обусловленные невозможностью заранее предсказать характер законов распределения координат системы.
[12]
Питание электродвигателя в замкнутой системе автоматического управления производится от индивидуального ре
Замкнутая и разомкнутая система управления. Назначение обратной связи (показать на примере)
Процессы, связанные с поиском, сбором, хранением, обработкой, кодированием и передачей информации, называют информационными.
Управление каким-либо объектом живой или неживой природы осуществляет человек или устройство. Для описания процесса управления можно выделить следующие критерии:
• объект управления — может быть представителем живой или неживой природы: автомобиль, компьютер, человек, лошадь и т. д.;
д.;
• цель управления — ожидаемый результат;
• исходная информация — сведения о существующей обстановке, объекте управления, профессиональные знания и навыки и пр;
• текущая информация — сведения об изменении обстановки в процессе управления, изменении свойств объекта.
В случае, когда текущая информация позволяет корректировать процесс управления, говорят, что существует обратная связь. Такой процесс и называют замкнутым процессом управления.
Рассмотрим пример:
Управляющий объект — летчик, управляемый объект — самолет, цель — доставка груза в некий отдаленный пункт. Исходной информацией для летчика являются:
• профессиональные навыки;
• маршрут, разработанный по штурманским картам;
• состояние самолета на момент взлета;
• метеосводка на момент вылета из аэропорта.
В процессе управления (полета) к летчику могут поступить сведения о неблагоприятных метеоусловиях в конечном пункте маршрута, о неудовлетворительном состоянии посадочной полосы и т. п. Вследствие чего самолет может приземлиться на ближайшем к нашему пункту аэродроме, где позволяют условия.
п. Вследствие чего самолет может приземлиться на ближайшем к нашему пункту аэродроме, где позволяют условия.
Но управление не всегда происходит по замкнутой схеме. Например, светофор не может воспринимать текущую информацию. Он только вы дает управляющее воздействие (тогда как инспектор ГАИ ориентируется, исходя из состояния на дороге). Такой процесс является незамкнутым процессом управления.
Системы управления делятся на три группы — в зависимости от участия человека в процессе:
• системы автоматического управления — все процессы, связанные с получением и обработкой информации, формированием управляющих сигналов, автоматизированы в соответствии с замкнутой схемой управления, представленной на рисунке. Такие системы используются в опасном для человека производстве, на космических спутниках и т.п.;
• неавтоматические системы управления — человек самостоятельно оценивает состояние объекта управления и в соответствии со своей оценкой воздействует на него. Например — учитель на уроке;
Например — учитель на уроке;
• автоматизированные системы управления — сбор и обработка информации осуществляется автоматически, а решения по управлению принимает человек. Например — автоматизированная система продажи железнодорожных билетов «Экспресс».
Задание 2.
Программы-архиваторы и их назначение.
Для долговременного хранения или передачи по компьютерным сетям файлы архивируются (сжимаются) с помощью файловых менеджеров и специализированных приложений — архиваторов.
Алгоритмы и методы архивации. Существуют различные алгоритмы архивации данных без потери информации, при которых при разархивации данные будут восстановлены в исходном виде. Самый простой алгоритм сжатия данных (running) основан на замене повторяющихся битов (в тексте может иметься последовательность одинаковых символов, в графическом файле — закрашенная одним цветом область и так далее). Например, в тексте подряд идут 10 пробелов, которые кодируются 10-ю байтами.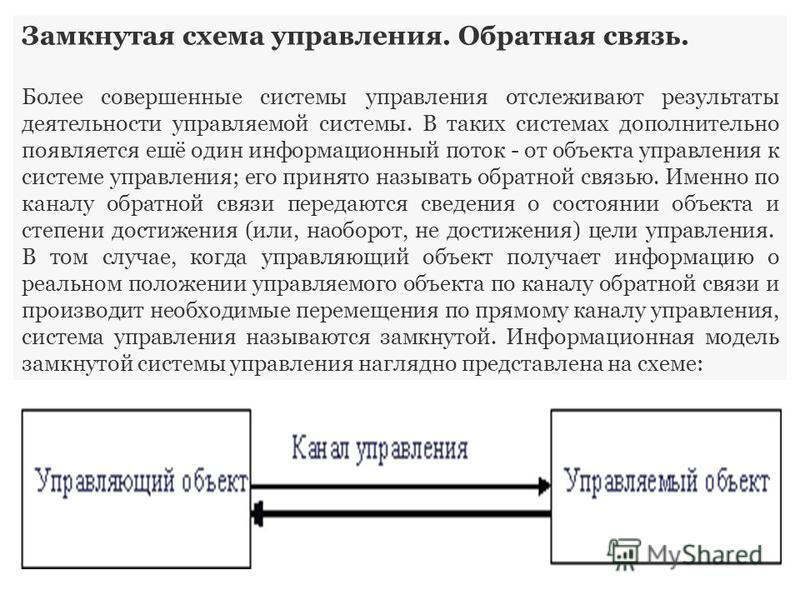 При архивации они заменяются 3-мя байтами (первый байт — кодирует заменяемый символ; второй байт — специальный байт «флажка» архивации, который указывает на необходимость развернуть первый байт в последовательность байтов; третий байт указывает количество повторяющихся байтов).
При архивации они заменяются 3-мя байтами (первый байт — кодирует заменяемый символ; второй байт — специальный байт «флажка» архивации, который указывает на необходимость развернуть первый байт в последовательность байтов; третий байт указывает количество повторяющихся байтов).
Алгоритм кодирования одинаковых последовательностей символов (LZW) ищет в текстовых файлах одинаковые слова, а в графических — одинаковые «узоры». Каждый такой фрагмент файла представляется определенным кодом (последовательностью бит) и в процессе архивации при повторных появлениях заменяется ссылкой на первичный код.
Существуют различные методы архивации файлов (ZIP, RAR, ARJ и др.), которые используют вышеописанные и другие алгоритмы архивации. Методы архивации различаются степенью сжатия файлов, скоростью выполнения и другими параметрами. Лучше всего сжимаются текстовые и графические файлы и практически не сжимаются файлы архивов.
К билету №4.
Задание 1.
Представление информации. Естественные и формальные языки.
Представление информации в различных формах происходит в процессе восприятия окружающей среды живыми организмами и человеком, в процессах обмена информацией между человеком и человеком, человеком и компьютером, компьютером и компьютером и т.д. Преобразование информации из одной формы в другую (кодирование) необходимо для того, чтобы живой организм, человек или компьютер мог хранить и обрабатывать информацию в удобной для него форме, на понятном для него языке.
Язык как знаковая система. Для обмена информацией с другими людьми человек использует естественные языки (русский, английский, китайский и др.), т.е. информация представляется с помощью естественных языков. В основе языка лежит алфавит, т.е. набор символов (знаков), которые человек различает по их начертанию. В основе русского языка лежит кириллица, содержащая 33 знака, английский язык использует латиницу (26 знаков), китайский язык использует алфавит из десятков тысяч знаков (иероглифов).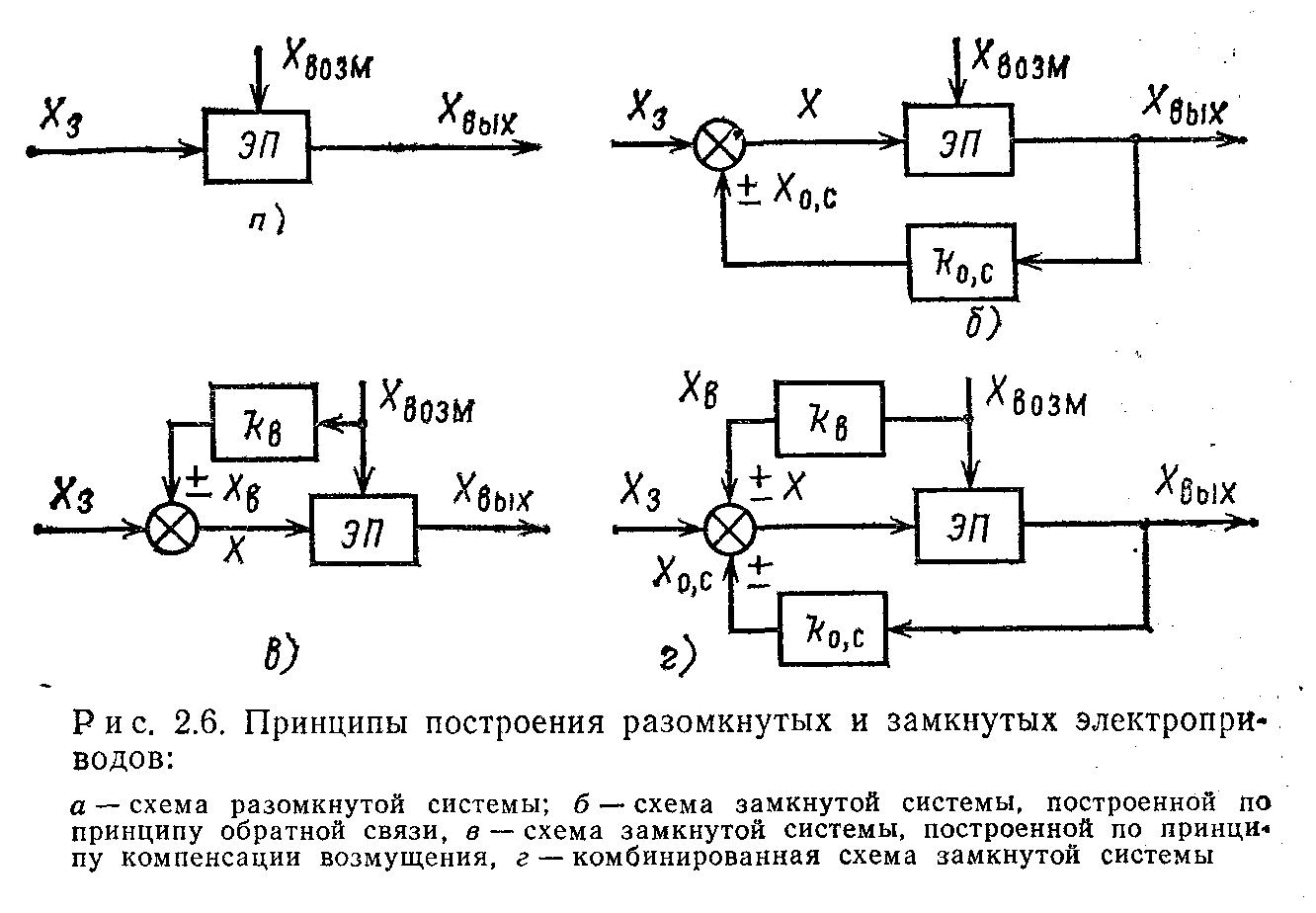
Последовательности символов алфавита, в соответствии с правилами грамматики, образуют основные объекты языка — слова. Правила, согласно которым образуются предложения из слов данного языка, называются синтаксисом. Необходимо отметить, что в естественных языках грамматика и синтаксис языка формулируются с помощью большого числа правил, из которых существуют исключения, т.к. такие правила складывались исторически.
Наряду с естественными языками были разработаны формальные языки (системы счисления, алгебра, языки программирования и др.). Основное отличие формальных языков от естественных состоит в наличии не только жестко
зафиксированного алфавита, но и строгих правил грамматики и синтаксиса.
Например, системы счисления можно рассматривать как формальные языки, имеющие алфавит (цифры) и позволяющие не только именовать и записывать объекты (числа), но и выполнять над ними арифметические операции по строго определенным правилам.
Некоторые языки используют в качестве знаков не буквы и цифры, а другие символы, например, музыкальные ноты, изображения элементов электрических или логических схем, дорожные знаки, точки и тире (код азбуки Морзе) и др.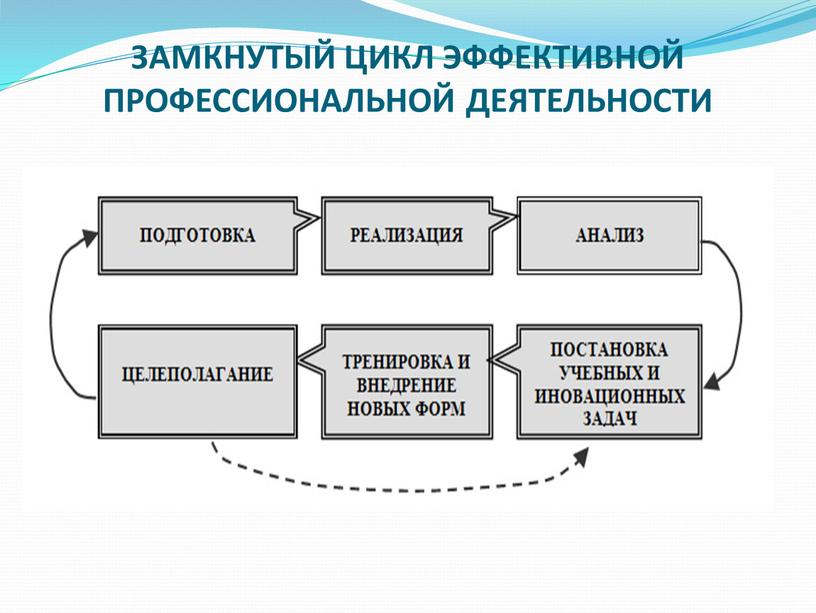
Знаки могут иметь различную физическую природу. Например, для представления информации с использованием языка в письменной форме используются знаки., которые являются изображениями на бумаге или других носителях, в устной речи в качестве знаков языка используются различные звуки (фонемы), а при обработке текста на компьютере знаки представляются в форме последовательности электрических импульсов (компьютерных кодов).
Система управления, ее элементы. Разомкнутая, замкнутая, комбинированная системы управления, их характеристика, достоинства и недостатки, условия применения.
⇐ ПредыдущаяСтр 4 из 27Следующая ⇒
Система управления – это совокупность управляемого объекта и органа управления, определяющая форму информационных связей между ними.
Входные элементы в управляемых системах делятся на 2 вида:
1. Управляющие воздействия.
2. Возмущающие воздействия.
В зависимости от того, какая информация используется для выработки управленческих воздействий, различают 3 вида систем управления:
1. Разомкнутая с.у. – система управления по возмущениям, это система, в которой для выработки, упр. воздействий используется информация о входе.
Разомкнутая с.у. – система управления по возмущениям, это система, в которой для выработки, упр. воздействий используется информация о входе.
Для управления с помощью разомкнутой системы необходимо точное измерение внешних возмущений и точное знание характеристик объекта управления. Эта система компенсирует только те возмущения, которые измерены управляющим устройством.
Преимущества: простота реализации и быстродействие, низкие затраты на управление.
Недостатки: орган управления не в состоянии реагировать на помехи и изменения как в объекте управления, так и во внешней среде; невозможно компенсировать ошибки упрвления.
Управление по разомкнутому циклу используется в простых детерминированных системах.
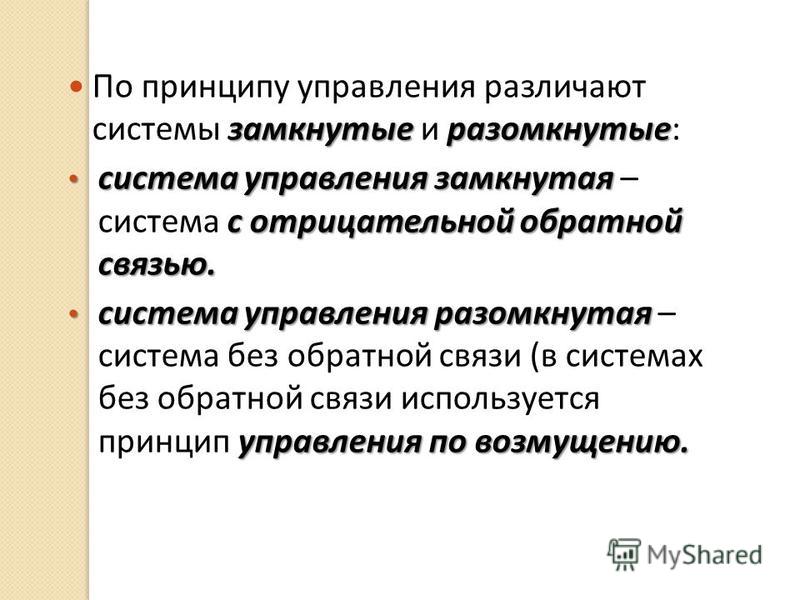
2. Система управления с обратной связью или система управления по отклонениям или замкнутая система управления – используется информация о выходе.
Орган управления вырабатывает управленческие воздействия, исходя из величины отклонения действительного состояния, выхода от заданного уровня. Наличие обратной связи дает возможность устранить даже те отклонения, природа которых неизвестна или которые трудно заранее предусмотреть.
Наличие обратной связи дает возможность устранить даже те отклонения, природа которых неизвестна или которые трудно заранее предусмотреть.
Регулятор с обратной связью реагирует и на изменение входа, и на изменение состояния объекта управления.
Преимущества: возможно обеспечить достижение цели в условиях, когда возмущающих воздействий много и не все они могут быть измерены.
Недостатки: система успешно работает только в условиях относительно небольших отклонений.
Используется при управлении сложными вероятностными системами.
3. Комбинированная система – используется информация о входе и о выходе.
Недостатки: высокие затраты на управление.
8. Внешняя среда в управлении. Факторы прямого и косвенного воздействия внешней среды на организацию. Характеристика внешней среды.
Внешняя среда — множество объектов, не входящих в систему, изменение свойств которых оказывает влияние на характер функционирования системы, а также те объекты, на которые влияет сама система.
Выделяют факторы внешней среды прямого и косвенного воздействия.
Факторы прямого воздействия непосредственно влияют на операции организации и испытывают на себе прямое же влияние операций организаций.
К факторам прямого воздействия относятся: поставщики, потребители, конкуренты, рынок трудовых ресурсов, система государственных институтов.
Факторы косвенного воздействия могут не оказывать прямого немедленного воздействия на операции, но тем не менее сказываются на них.
К факторам косвенного воздействия: социально-экономические условия, международные политические события, НТП, групповые интересы.
Характеристики внешней среды:
1. Сложность внешней среды, под которой понимается число факторов, на которые организация обязана реагировать, а также уровень вариативности каждого фактора.
2. Подвижность внешней среды — скорость, с которой происходят изменения в окружении организации.
3. Неопределенность внешней среды — характеризует количество информации, которой обладает организация по поводу конкретного фактора с учетом достоверности этой информации.
©2015 arhivinfo.ru Все права принадлежат авторам размещенных материалов.
Следящая система управления — Карта знаний
- Следящая система управления — это система автоматического управления, в которой управляемая величина воспроизводит произвольно изменяющееся задающее воздействие.
Пример следящей системы — радиолокационная станция, в её задачи входит сопровождение цели с заранее неизвестным законом движения.
О динамических свойствах следящей системы можно судить по величине ошибки. Также сигнал ошибки в следящих системах является сигналом, в зависимости от величины и «характера» которого осуществляется управление объектом. Различают системы статические и астатические. Статические системы управляются значением ошибки: есть ошибка — есть управление в системе, больше величина ошибки — сильнее реакция системы.
 Так, если целью сопровождения радиолокационной станции является неподвижно висящий вертолёт, то станция, отработав ошибку, «замирает». Если цель-вертолёт начнёт движение, то появится ошибка и система «оживёт». Если траектория движения цели будет круговой с постоянной скоростью, на постоянной высоте с центром в точке, где находится радиолокационная станция, то ошибка (её «характер») будет постоянной. Системы способные автоматически выполнять свои функции при наличии ошибки постоянной величины называют астатическими.
Так, если целью сопровождения радиолокационной станции является неподвижно висящий вертолёт, то станция, отработав ошибку, «замирает». Если цель-вертолёт начнёт движение, то появится ошибка и система «оживёт». Если траектория движения цели будет круговой с постоянной скоростью, на постоянной высоте с центром в точке, где находится радиолокационная станция, то ошибка (её «характер») будет постоянной. Системы способные автоматически выполнять свои функции при наличии ошибки постоянной величины называют астатическими.Следящая система может быть реализована с любым фундаментальным принципом управления и отличается от аналогичной системы программного управления тем, что вместо датчика программы в ней будет размещено устройство слежения за изменениями внешних воздействий.
В следящих системах управляющее воздействие также является величиной переменной, но математическое описание его во времени не может быть установлено, так как источником сигнала служит внешнее явление, закон изменения которого заранее неизвестен.
Так как следящие системы предназначены для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка, так же как и в случае систем программного регулирования, является той характеристикой, по которой можно судить о динамических свойствах следящей системы. Ошибка в следящих системах, как и в системах программного регулирования, является сигналом, в зависимости от величины которого осуществляется управление исполнительным двигателем.
 Так, если целью сопровождения радиолокационной станции является неподвижно висящий вертолёт, то станция, отработав ошибку, «замирает». Если цель-вертолёт начнёт движение, то появится ошибка и система «оживёт». Если траектория движения цели будет круговой с постоянной скоростью, на постоянной высоте с центром в точке, где находится радиолокационная станция, то ошибка (её «характер») будет постоянной. Системы способные автоматически выполнять свои функции при наличии ошибки постоянной величины называют астатическими.
Так, если целью сопровождения радиолокационной станции является неподвижно висящий вертолёт, то станция, отработав ошибку, «замирает». Если цель-вертолёт начнёт движение, то появится ошибка и система «оживёт». Если траектория движения цели будет круговой с постоянной скоростью, на постоянной высоте с центром в точке, где находится радиолокационная станция, то ошибка (её «характер») будет постоянной. Системы способные автоматически выполнять свои функции при наличии ошибки постоянной величины называют астатическими.
Источник: Википедия
Связанные понятия
Систе́ма управле́ния — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение, предназначенный для достижения определённых целей. Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
Нейроуправление (англ. Neurocontrol) — частный случай интеллектуального управления, использующий искусственные нейронные сети для решения задач управления динамическими объектами. Нейроуправление находится на стыке таких дисциплин, как искусственный интеллект, нейрофизиология, теория автоматического управления, робототехника. Нейронные сети обладают рядом уникальных свойств, которые делают их мощным инструментом для создания систем управления: способностью к обучению на примерах и обобщению данных…
Мониторинг — система постоянного наблюдения за явлениями и процессами, проходящими в окружающей среде и обществе, результаты которого служат для обоснования…
Адаптивное управление — совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления или внешних возмущений, действующих на объект управления.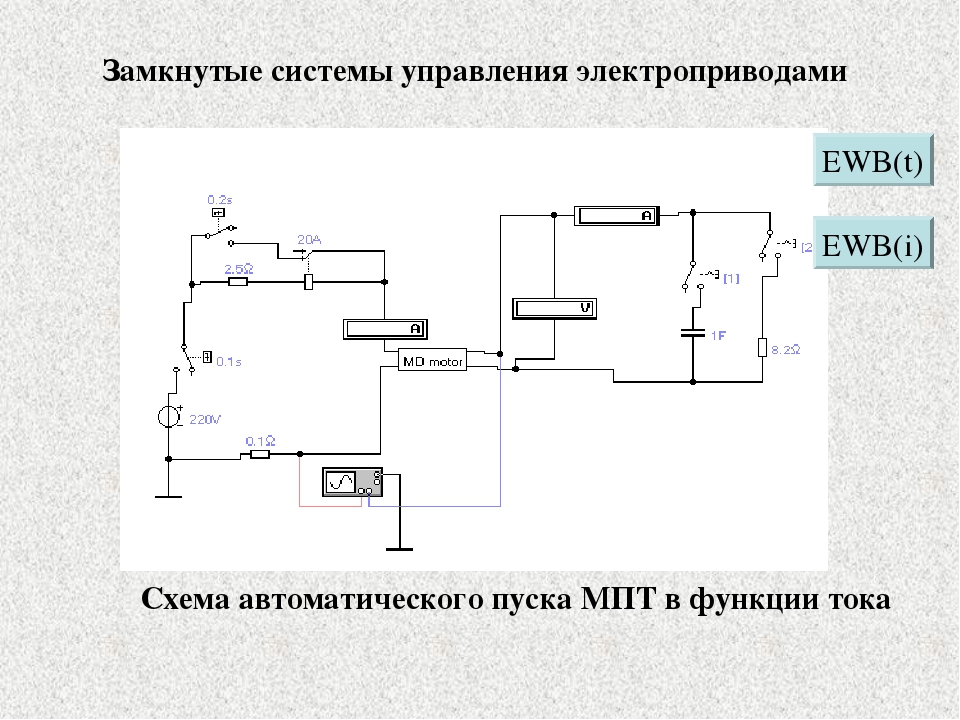 Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления.
Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления.
Противоаварийная защита — система методов и устройств, которые предназначены для быстрого прекращения развития аварии. Технические устройства срабатывают автоматически или при внешнем управлении (операторами и персоналом) в момент достижении одним из контролируемых параметров установленного значения, могущего привести или приведшего к возникновению аварии. При включении человека-оператора в систему противоаварийной защиты в ряде случаев для него предусматриваются специальные средства защиты.
Система реального времени (СРВ) — это система, которая должна реагировать на события во внешней по отношению к системе среде или воздействовать на среду в рамках требуемых временных ограничений. Оксфордский словарь английского языка говорит об СРВ как о системе, для которой важно время получения результата. Другими словами, обработка информации системой должна производиться за определённый конечный период времени, чтобы поддерживать постоянное и своевременное взаимодействие со средой. Естественно…
Другими словами, обработка информации системой должна производиться за определённый конечный период времени, чтобы поддерживать постоянное и своевременное взаимодействие со средой. Естественно…
Объект управления — обобщающий термин кибернетики и теории автоматического управления, обозначающий устройство или динамический процесс, управление поведением которого является целью создания системы автоматического управления.
Телеметрия, телеизмерение (от др.-греч. τῆλε «далеко» + μέτρεω — «измеряю») — информация о значениях измеряемых параметров (напряжения, тока, давления, температуры и т. п.) контролируемых и управляемых объектов методами и средствами телемеханики. Термин образован от греческих корней «теле» — «удалённый» и «метрон» — «измерение». Хотя сам термин в большинстве случаев относится к механизмам беспроводной передачи информации (например, используя радио или инфракрасные системы) он также заключает в себе.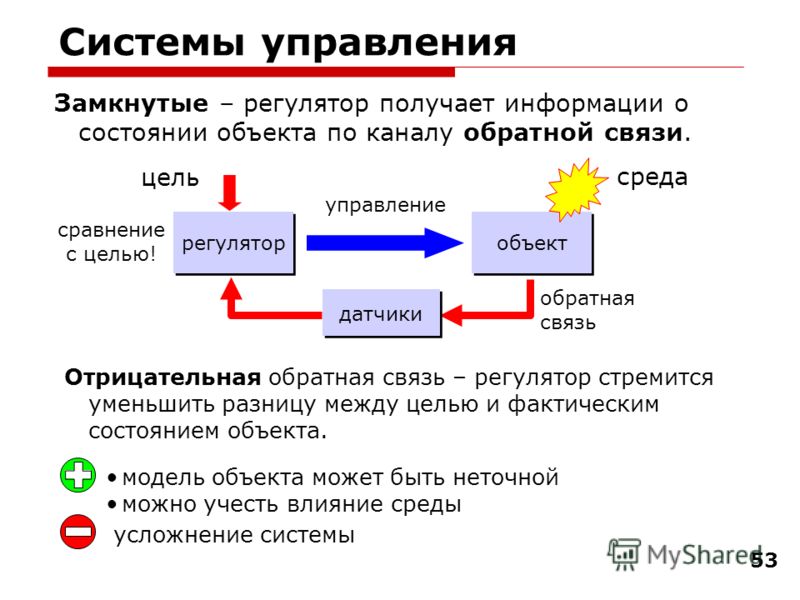 ..
..
Статическая система — это такая система автоматического регулирования, в которой ошибка регулирования стремится к постоянному значению при входном воздействии, стремящемся к некоторому постоянному значению. Иными словами статическая система не может обеспечить постоянства управляемого параметра при переменной нагрузке.
Роба́стное управле́ние — совокупность методов теории управления, целью которых является синтез такого регулятора, который обеспечивал бы хорошее качество управления (к примеру, запасы устойчивости), если объект управления отличается от расчётного или его математическая модель неизвестна. Таким образом, робастность означает малое изменение выхода замкнутой системы управления при малом изменении параметров объекта управления. Системы, обладающие свойством робастности, называются робастными (грубыми…
Теория автоматического управления (ТАУ) — научная дисциплина, которая изучает процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Отказоустойчивость — свойство технической системы сохранять свою работоспособность после отказа одного или нескольких составных компонентов.
Автоматизация — одно из направлений научно-технического прогресса, использующее саморегулирующие технические средства и математические методы с целью освобождения человека от участия в процессах получения, преобразования, передачи и использования энергии, материалов, изделий или информации, либо существенного уменьшения степени этого участия или трудоёмкости выполняемых операций. Термин «автоматизация», основанный на более раннем слове «автоматический» (поступающий с автомата), не был широко использован…
Позиционный трекинг (англ. positional tracking) — одна из технологий виртуальной реальности, лежащая в основе взаимодействия человека с виртуальным миром. Предназначена для определения позиции и ориентации реального объекта (например, руки, головы или специального устройства) в виртуальной среде с помощью нескольких степеней свободы. Как правило, трёх координат его расположения (x, y, z) и трёх углов, задающих его ориентацию в пространстве («крен», «тангаж», «рыскание» или углы Эйлера). Определение…
positional tracking) — одна из технологий виртуальной реальности, лежащая в основе взаимодействия человека с виртуальным миром. Предназначена для определения позиции и ориентации реального объекта (например, руки, головы или специального устройства) в виртуальной среде с помощью нескольких степеней свободы. Как правило, трёх координат его расположения (x, y, z) и трёх углов, задающих его ориентацию в пространстве («крен», «тангаж», «рыскание» или углы Эйлера). Определение…
Сетевая система управления (NCS — Network Control System) — это управляющая система, в которой контуры управления замкнуты через сеть связи. Отличительной чертой NCS является то, что компоненты системы обмениваются сигналами управления и обратной связи через коммуникационную сеть в форме пакетов.
Авиационный (пилотажный) тренажёр — симулятор полёта, предназначенный для наземной подготовки пилотов. В авиационном тренажёре имитируется, посредством аппаратно-программного комплекса, динамика полёта и работа систем воздушного судна (ВС) с помощью специальных моделей, реализованных в программном обеспечении вычислительного комплекса тренажёра.
В авиационном тренажёре имитируется, посредством аппаратно-программного комплекса, динамика полёта и работа систем воздушного судна (ВС) с помощью специальных моделей, реализованных в программном обеспечении вычислительного комплекса тренажёра.
Асинхро́нная ло́гика — разновидность взаимодействия логических элементов цифровых устройств. Отличается от синхронной тем, что её элементы действуют асинхронно, не подчиняясь глобальному генератору тактовых импульсов.
Телемеханика — наука об управлении и контроле на расстоянии с передачей (по каналу связи) кодированных электрических или радиосигналов, несущих управляющую информацию или данные о состоянии контролируемого объекта. Объектами телемеханического управления и контроля могут служить технологические процессы, машины, устройства, биологические системы и др.
Радиоуправле́ние — метод дистанционного управления техническими объектами, при котором управляющие воздействия и обратная связь осуществляются через радиоканал с помощью радиоволн.
Обуче́ние с учи́телем (англ. Supervised learning) — один из способов машинного обучения, в ходе которого испытуемая система принудительно обучается с помощью примеров «стимул-реакция». С точки зрения кибернетики, является одним из видов кибернетического эксперимента. Между входами и эталонными выходами (стимул-реакция) может существовать некоторая зависимость, но она неизвестна. Известна только конечная совокупность прецедентов — пар «стимул-реакция», называемая обучающей выборкой. На основе этих…
Плезиохронная цифровая иерархия (ПЦИ, также PDH от англ. Plesiochronous Digital Hierarchy) — цифровой метод передачи данных и голоса, основанный на временном разделении канала и технологии представления сигнала с помощью импульсно-кодовой модуляции (ИКМ).
Автопилот — устройство или программно-аппаратный комплекс, ведущий транспортное средство по определённой, заданной ему траектории. Наиболее часто автопилоты применяются для управления летательными аппаратами (в связи с тем, что полёт чаще всего происходит в пространстве, не содержащем большого количества препятствий), а также для управления транспортными средствами, движущимися по рельсовым путям.
Наиболее часто автопилоты применяются для управления летательными аппаратами (в связи с тем, что полёт чаще всего происходит в пространстве, не содержащем большого количества препятствий), а также для управления транспортными средствами, движущимися по рельсовым путям.
Система управления освещением — это интеллектуальная сеть, которая позволяет обеспечить нужное количество света, где и когда это необходимо. Эта система широко применяется в коммерческой и жилой недвижимости, в промышленности и для внутренней и наружной рекламы.
Гибридный компьютер, гибридная вычислительная машина, аналого-цифровая система — вид гибридной вычислительной системы (ГВС), сочетающий в себе свойства аналоговых и цифровых вычислительных устройств.
Состояние гонки (англ. race condition), также конкуренция — ошибка проектирования многопоточной системы или приложения, при которой работа системы или приложения зависит от того, в каком порядке выполняются части кода.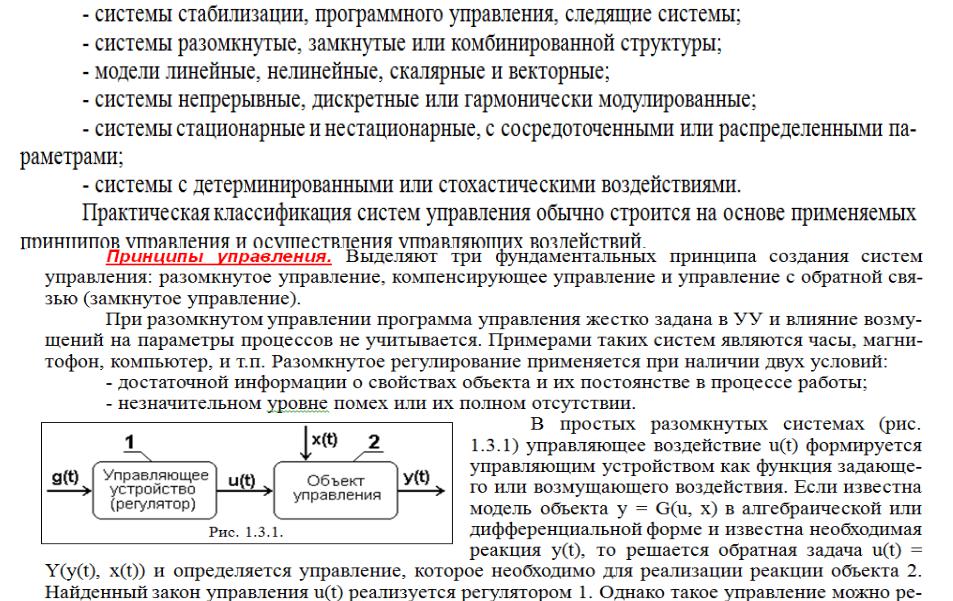 Своё название ошибка получила от похожей ошибки проектирования электронных схем (см. Гонки сигналов).
Своё название ошибка получила от похожей ошибки проектирования электронных схем (см. Гонки сигналов).
Причинная система (англ. causal system) — в теории систем динамическая система, для которой выполняется принцип причинности, то есть выход такой системы y(t) в какой-то определённый момент времени t0 зависит только от значений входного сигнала x(t) в моменты времени t меньше или равным моменту t0. Таким образом, в таких системах вектор фазовых координат и выходное значение зависит только от прошлого и текущего значений входного сигнала.
Операционная система реального времени (ОСРВ, англ. real-time operating system, RTOS) — тип операционной системы, основное назначение которой — предоставление необходимого и достаточного набора функций для работы систем реального времени на конкретном аппаратном оборудовании.
Техническая система — искусственно созданная система, предназначенная для удовлетворения определенной потребности, существующая 1) как изделие производства, 2) как устройство, потенциально готовое совершить полезный эффект, 3) как процесс взаимодействия с компонентами окружающей среды, в результате которого образуется полезный эффект.
Источники энтропии используются для накопления энтропии, с последующим получением из неё начального значения (англ. initial value, seed), необходимого генераторам истинно случайных чисел (ГСЧ) для формирования случайных чисел. Отличие от генератора псевдослучайных чисел (ГПСЧ) в том, что ГПСЧ использует единственное начальное значение, откуда и получается его псевдослучайность, а ГСЧ всегда формирует случайное число, имея в начале высококачественную случайную величину, предоставленную различными…
Система сбора данных (ССД; Data acquisition, DAS, DAQ) — комплекс средств, предназначенный для работы совместно с персональным компьютером, либо специализированной ЭВМ и осуществляющий автоматизированный сбор информации о значениях физических параметров в заданных точках объекта исследования с аналоговых и/или цифровых источников сигнала, а также первичную обработку, накопление и передачу данных.
Цифровая антенная решётка (ЦАР) (антенная решётка с цифровой обработкой сигнала) — антенная решётка с поэлементной обработкой сигналов, в которой сигналы от излучающих элементов подвергаются аналого-цифровому преобразованию с последующей обработкой по определённым алгоритмам.
Винеровское оценивание — задача нахождения импульсной характеристики линейной стационарной системы, дающей на выходе оптимальную в смысле минимума математического ожидания средней квадратической ошибки оценку значений полезного сигнала, поступающего на вход в аддитивной смеси с шумом.
Мнемосхема — совокупность сигнальных устройств и сигнальных изображений оборудования и внутренних связей контролируемого объекта, размещаемых на диспетчерских пультах, операторских панелях или выполненных на персональном компьютере. Информация, которая выводится на мнемосхему, может быть представлена в виде аналогового, дискретного и релейного сигнала, а также графически. Наглядно отображая структуру системы, мнемосхема облегчает оператору запоминание схем объектов, взаимосвязь между параметрами…
Курсовертикаль — прибор, поставляющий данные об углах между географической системой координат (ГСК) и связанной системой координат (ССК), начальная точка которой совпадает с начальной точкой ГСК, а оси соответствуют, как правило — Y — продольной оси, Z — вертикальной, X — перпендикулярной им боковой оси транспортного средства, на котором установлена курсовертикаль.
Релейная защита — комплекс устройств, предназначенных для быстрого, автоматического (при повреждениях) выявления и отделения от электроэнергетической системы повреждённых элементов этой электроэнергетической системы в аварийных ситуациях с целью обеспечения нормальной работы всей системы.
Распознавание по голосу — одна из форм биометрической аутентификации, позволяющая идентифицировать личность человека по совокупности уникальных характеристик голоса. Относится к динамическим методам биометрии. Однако, поскольку голос человека может меняться в зависимости от возраста, эмоционального состояния, здоровья, гормонального фона и целого ряда других факторов, не является абсолютно точным. По мере развития звукозаписывающей и воспроизводящей техники, технология распознавания применяется с…
Компара́тор — это техническое средство, естественные или специально создаваемые среды, позволяющие сличать друг с другом меры однородных величин или показания измерительных приборов, а также сравнивать участки (точки) шкал измерений.
Радиолокационная станция (РЛС), рада́р (англ. radar от radio detection and ranging — радиообнаружение и измерение дальности) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности, скорости и геометрических параметров. Использует метод радиолокации, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин появился в 1941 году как звуковая аббревиатура (англ. RADAR), впоследствии перейдя в разряд самостоятельного слова…
Медиаконвертер (также преобразователь среды) — это устройство, преобразующее среду распространения сигнала из одного типа в другой. Чаще всего средой распространения сигнала являются медные провода и оптические кабели. Под средой распространения сигнала может пониматься любая среда передачи данных, однако в современной терминологии медиаконвертер работает как связующее звено только между двумя средами — оптическим и медным кабелями.
Адаптивный фильтр — система с линейным фильтром, имеющим передаточную функцию, контролируемую переменными параметрами и средствами для установки этих параметров согласно оптимизационному алгоритму. Ввиду сложности оптимизационных алгоритмов почти все адаптивные фильтры являются цифровыми фильтрами. Адаптивные фильтры требуются для некоторых приложений, поскольку некоторые параметры желательной операции обработки (например, местоположение отражающих поверхностей в реверберирующем пространстве) заранее…
В 2007 году Национальная лаборатория штата Айдахо провела Тест Генератора Авроры, чтобы продемонстрировать, как кибератака может уничтожить физические компоненты электросети. В эксперименте использовалась компьютерная программа для быстрого включения и выключения прерывателя дизельной электростанции в противофазе с остальной сетью, что приводит её к взрыву. Эта уязвимость называется Aurora Vulnerability — уязвимость Авроры. Автор тестирования — Перри Педерсон.
Подробнее: Тест генератора Аврора
Квантовая криптография — метод защиты коммуникаций, основанный на принципах квантовой физики. В отличие от традиционной криптографии, которая использует математические методы, чтобы обеспечить секретность информации, квантовая криптография сосредоточена на физике, рассматривая случаи, когда информация переносится с помощью объектов квантовой механики. Процесс отправки и приёма информации всегда выполняется физическими средствами, например, при помощи электронов в электрическом токе, или фотонов в…
Бондграф — графическое представление динамической системы, возникающее при описании той или иной физической (механической, электрической, гидравлической, пневматической, экономической и т.д.) системы, отражающее процесс перераспределения энергии в данной системе. Похож на граф, более известный как блок-схема, или на граф прохождения сигналов и опирается на закон сохранения энергии. Основное отличие от блок-схем или графов прохождения сигналов состоит в том, что в бондграфе рёбрам ставится в соответствие…
Имитационные модели связаны не с аналитическим представлением, а с принципом имитации с помощью информационных и программных средств сложных процессов и систем в самом сложном аспекте — динамическом.
Подробнее: Имитационное моделирование сложных систем
Кибернетическая физика — область науки на стыке кибернетики и физики, изучающая физические системы кибернетическими методами. Часть молекулярной физики тоже входит в Кибернетику. Под кибернетическими методами понимаются методы решения задач управления, оценивания переменных и параметров (идентификации), адаптации, фильтрации, оптимизации, передачи сигналов, распознавания образов и др., развитые в рамках кибернетики. Физические системы также обычно понимаются широко: как системы живой и неживой природы…
Мнемони́ческий щи́т (от греч. μνημο – «память») – это диспетчерское оборудование, устройство визуализации информации, предназначенное для оперативного отображения данных о состоянии объекта наблюдения. Представляет собой несущую конструкцию с размещенной на ней схемой объекта диспетчеризации (мнемосхемой).
Подробнее: Мнемощит
Клэйтро́ника — абстрактная концепция будущего, состоящая в объединении наномасштабных роботов и информатики с целью создания индивидуальных компьютеров атомных размеров, называемых клэйтронными атомами или к-атомами. Они могут вступать в контакт друг с другом и создавать материальные 3-D объекты, с которыми может взаимодействовать пользователь. Эта идея входит в более общую идею создания программируемой материи. Многочисленные исследования и эксперименты с клэйтроникой проводятся группой учёных в…
Управление. Тест — Информатика — Каталог файлов
Тест по теме: «Управление»
1. Термином «управление» обозначают:
А) процесс воздействия на объект с целью организации его функционирования по заданной программе;
Б) процесс передачи информации о состоянии объекта;
В) процесс обработки информации о состоянии среды, в которой функционирует управляемый объект;
Г) процесс обработки информации о состоянии управляющего объекта;
Д) процесс обработки информации о состоянии управляемого объекта.
2. «Разомкнутая система управления» — это система управления, в которой:
А) имеется несколько каналов обратной связи;
Б) отсутствует информация о состоянии объекта управления;
В) имеются информационное взаимодействия «управляющий объект — объект управлении» и «объект управления — управляющий объект»;
Г) в зависимости от состояния управляемого объекта, изменяется управленческое воздействие со стороны управляющего объекта на управляемый объект;
Д) отсутствует изменение в состоянии или поведении объекта управления при наличии управляющих воздействий со стропы объекта управления.
3. Замкнутая система управления обличается от разомкнутой:
А) наличием объекта управления;
Б) отсутствием управляющих воздействий;
В) наличием одного или нескольких каналов обратной связи;
Г) отсутствием объекта управления;
Д) отсутствием органов управления.
4. Канал обратной связи в замкнутой системе управления предназначен:
А) для осуществления объектом управления управляющих воздействий:
Б) для кодирования информации, поступающей к объекту управления;
В) для получения информации об окружающей среде;
Г) для информационного взаимодействия управляющего и управляемого объекта в системе управления;
Д) для организации взаимодействия объекта управления с окружающей средой.
5. Автоматическое управление — это:
А) управление объектом, осуществляемое без участия человека;
Б) управление с помощью специальных датчиков;
В) оптимальный процесс управления;
Г) управление с обратной связью;
Д) управление без обратной связи.
6. Роль канала обратной связи в системе управления «водитель — автомобиль» играют:
А) колеса автомобиля; Б) спидометр; В) двигатель; Г) руль; Д) зеркало заднего обзора.
7) В системе управления «водитель — автомобиль» передачу управляющих воздействий обеспечивают:
А) руль; Б) спидометр; В) двигатель; Г) колеса автомобиля; Д) зеркало заднего обзора.
Ключ:
1) А; 2)Д; 3) В; 4) Г; 5) А ; 6) Д 7) А
Система управления с обратной связью | Статья о замкнутой системе управления по The Free Dictionary
Обычно ПИ-регулятор используется для повышения эффективности замкнутой системы управления асинхронным двигателем. Как мы покажем далее, он смягчает условия устойчивости замкнутой системы управления, таким образом уменьшая ограничения синтеза, значительно сокращая количество одновременно рабочие контроллеры с поддержанием плавности работы и переключением нечеткой структуры. Кроме того, в литературе [18] согласно задаче жесткого управления ориентацией спутника предусматривается наличие и отсутствие внешнего мешающего момента в условиях двух видов конечного времени закон управления с обратной связью по состоянию, который с учетом ситуации без возмущений, основанный на природе нелинейных однородных систем, разрабатывает своего рода алгоритм управления с обратной связью с ЧР, позиционную замкнутую систему управления с конечным временем сходимости к равновесию и метод имеет простую структуру и удобен для применения в инженерной практике.Puri и др. Сообщили о своей системе управления с обратной связью, которая нацелена на относительно высокое значение BIS, равное 50 (1). Система заполнения Priamus для последовательного формования имеет систему управления с обратной связью, предназначенную для обеспечения постоянного качества больших формованных деталей. Система Common Rail нового поколения Multec основана на комбинации электромагнитных клапанов с очень быстрым откликом, которые обеспечивают возможность многократного впрыска, повышенного давления впрыска, и новой системы управления с обратной связью, известной как Accelerometer Pilot Control (APC).Микрофлоуметр, используемый для системы управления с обратной связью, также генерирует информацию о каждой операции, которая может быть передана оператору и сохранена в базе данных. Разработана система управления с обратной связью, которая обеспечивает плавное и точное позиционирование двигателя постоянного тока. В двигателе PowerTech 6,8 л также используется система управления с обратной связью, которая отслеживает эффективность сгорания для поддержания стабильных характеристик двигателя и выбросов, что, по словам Дира, делает двигатель очень отзывчивым, особенно под нагрузкой.Датчики и насосы представляют собой один уровень многослойной системы в системе управления с обратной связью. Система диспетчерского управления и сбора данных (SCADA) включает и выключает насосы, двигатели и клапаны и регулирует их в соответствии с запрограммированным набором критериев. Разработайте контроллер (4) для системы (1) с 0 системой управления с обратной связью. асимптотически устойчива, если существуют матрицы Z [член] [P.sup.nxn], G [член] [R.sup.mxm] и H [член] [R.sup.mxq], такие что In В системе управления с обратной связью текущее состояние управляемой системы передается обратно в контроллер через измерения датчиков.
Контроль давления в сравнении с регулированием расхода
Пневматическая гидравлическая энергия — это универсальный и экономичный метод подачи энергии в контрольно-измерительные приборы и промышленные процессы. В системах охлаждения жидкость проходит мимо чего-либо, чтобы отвести тепло. В аналитическом приборе скорость газа-носителя может быть критическим механизмом синхронизации. Давление газа может уменьшить апноэ во сне. В каждом из этих случаев жидкость контролируется для достижения определенного результата. Мощность, передаваемая в эти процессы, требует контроля давления или расхода.
Как достигается контроль давления и расхода? Каковы идеальные продукты для управления гидравлической мощностью и как они влияют на результат? Ответ на эти вопросы начинается с определения давления и расхода и понимания систем с открытым и закрытым контуром.
Давление сила. Он действует во всех направлениях одновременно и с одинаковой силой. Величина силы, оказываемой давлением, напрямую связана с областью, в которой давление находится (давление = сила / площадь).Давление не требует направленного воздействия, как молоток по гвоздю. Его просто нужно направить и включить в конкретную операцию для надежной передачи энергии. Давление может существовать в вакууме (отрицательное давление) при движении по трубопроводу (нижний поток) или без давления внутри статической камеры.
Поток — это движение жидкости под давлением между объемами с переменным (перепадом) давления. Жидкость под давлением всегда перемещается от более высокого давления к более низкому.Без перепада давления жидкость застаивается, и в системе отсутствует поток. Поток (с точки зрения гидродинамики) подразделяется на две отдельные измеряемые скорости: объемный расход и массовый расход.
Весь газ имеет массу. Трехмерное пространство, содержащее молекулы газа (массу), называется объемом. При изменении температуры и давления изменяется и емкость (объем). Объемный расход измеряет пространство, занимаемое определенным газом во времени. Стандартные единицы измерения включают литры в минуту (LPM) и кубические футы в минуту (CFM).
Масса объекта имеет конечное количество молекул. Газы могут сжимать свою массу в все меньшие и меньшие объемы для создания давления. Массовый расход измеряет количество молекул, проходящих через одну точку. Стандартные единицы измерения — килограммы в минуту или фунты в минуту.
Разомкнутый и замкнутый контур управления жидкостью
Управление текучей средой для гидравлического процесса предполагает возможность установки или изменения количества энергии для этого процесса.Доступны многочисленные методы и продукты для регулирования гидравлической энергии. Однако все они сводятся к одной из двух концепций: управление без обратной связи и управление с обратной связью .
Стандартный смеситель — это пример системы с открытым контуром. Если положить руку под кран для обратной связи, получится замкнутая система.
В схемах управления без обратной связи контроллер обеспечивает входное действие для генерации выходного отклика; результат операции независим и неизвестен контроллеру.Это причинно-следственная связь. Примером разомкнутой системы является стандартный водопроводный кран. Контроллер (рука) поворачивает ручку, чтобы открыть клапан (входное действие). Клапан открывается и (надеюсь) позволяет воде вытекать из крана. Клапан и рука (контроллер) не знают, течет ли вода. Следовательно, система считается открытой. По очевидным причинам системы с разомкнутым контуром менее точны, менее воспроизводимы и (как правило) менее дороги.
В схемах управления с обратной связью входное действие, обеспечиваемое контроллером, зависит от обратной связи от процесса, которым он намеревается управлять.На примере смесителя предположим, что человек хочет мыть руки при «приемлемой» температуре. Контроллер (рука) поворачивает и горячий, и холодный клапаны, чтобы вода могла течь из патрубка. Вторую руку помещают под проточную воду, чтобы определить (измерить) температуру. Мозг интерпретирует температуру воды как слишком горячую или слишком холодную, и эта обратная связь передается исходной руке (контроллеру) для изменения входного действия. Приемлемая температура теперь поддерживается и легко регулируется при изменении.Проще говоря, если выход (результат) напрямую связан со входом (действием) через обратную связь, система является замкнутой системой, в противном случае она считается разомкнутой.
Механическое и электронное управление потоком
Клапаны управления потоком
регулируют объемный расход жидкости, протекающей через них. Как правило, изменение размера отверстия — это способ установки и регулировки расхода. Коническая игла, входящая и выходящая из отверстия или открывающая и закрывающая зазор внутри шарового клапана, изменяет эту скорость.Регуляторы объемного расхода обычно используются для управления скоростью — например, скоростью выдвижения и втягивания цилиндра или скоростью, с которой жидкость распыляется или распределяется.
Механические клапаны регулирования потока — одни из наиболее часто используемых на рынке клапанов регулирования потока. Они работают на самых разных рынках, от предметов повседневного обихода (например, крана для воды выше) до точных медицинских изделий. Некоторые стандартные отраслевые термины для механического управления потоком, среди прочего, включают игольчатые клапаны, шаровые клапаны и дозирующие / выпускные клапаны.Доступны механические регуляторы расхода как с разомкнутым, так и с замкнутым контуром (в некоторых редких случаях).
Пропановые баллоны стандартно поставляются с регулируемым контуром. Пропан под давлением выпускается при открытии клапана, и скорость потока напрямую зависит от размера отверстия. Скорость потока максимальна, когда бак полон. Со временем давление в резервуаре уменьшается, а разница (между давлением в резервуаре и давлением на выходе) сокращается, уменьшая поток. Механические регуляторы расхода с замкнутым контуром встречаются редко, так как трудно послать сигнал обратной связи на механический клапан.Однако простым примером может служить откидной клапан на унитазе, который закрывается, чтобы пропускать меньше потока в резервуар по мере подъема поплавка, и в конечном итоге закрывается, когда резервуар полон.
| Пример управления без обратной связи. | Пример управления с обратной связью. |
Медицинское приложение, в котором два газа смешиваются в точном соотношении для доставки пациенту, требует высокой точности и должно быть замкнутой системой.
Во многих случаях потребность процесса колеблется, создавая нестабильность и делая невозможным повторяемое управление потоком с помощью механических клапанов потока. В этих ситуациях становится необходимым переменное управление потоком с помощью электрического входа. Промышленный термин для этих средств управления — пропорциональные клапаны. Пропорциональные клапаны имеют широкий спектр способов срабатывания, например, напряжение, ток, ступенчатый или цифровой вход. Они могут быть спроектированы в замкнутой системе управления с обратной связью от электронного расходомера или разомкнутой системе.Эти клапаны идеально подходят для применений, где требования к потоку постоянно меняются.
Системы управления потоком с обратной связью обычно возникают из-за требований к точности. Пропановый камин с дистанционным управлением не требует высокой точности — только должна быть заметная разница между маленьким и большим пламенем — и, следовательно, может быть системой с открытым контуром. Однако медицинское приложение, в котором два газа смешиваются в точных соотношениях для доставки пациенту, требует высокой точности и должно быть замкнутой системой.В случае смешения газов может даже потребоваться массовый расходомер, а не объемный расходомер, чтобы гарантировать правильность соотношений.
Механический и электронный контроль давления
Устройства для регулирования давления предназначены для управления силой, создаваемой гидравлической системой. Регуляторы давления обычно известны как регуляторы давления и, как и регуляторы потока, доступны как в ручном, так и в электронном вариантах. Регуляторы давления не предназначены для регулирования расхода.Хотя регуляторы давления, используемые в проточных системах, по своей сути влияют на поток, контролируя давление, они не предназначены для работы в качестве регуляторов потока.
Регуляторы давления
по своей природе являются замкнутыми, что означает, что они должны иметь возможность определять давление ниже по потоку (или выше по потоку для регуляторов противодавления) через контур обратной связи, который автоматически регулируется для поддержания заданного значения. Когда выходной сигнал регулятора определяет, что давление упало ниже заданного значения, регулятор открывается и допускает большее давление.Когда давление достигает заданного значения, регулятор закрывается и больше не пропускает поток.
Механические регуляторы давления
бывают разных стилей, но каждый механический регулятор имеет три основных элемента:
- Ограничение — Клапан, который обеспечивает регулируемое ограничение потока, обычно тарельчатый клапан
- Нагрузка — Деталь, которая приводит в действие ограничительный клапан для установки желаемого давления на выходе, обычно поршень или диафрагма
- Ссылка — Сила, которая определяет, когда поток на входе равен расходу на выходе для обеспечения постоянного давления на выходе, часто пружина
Использование эталонной силы является то, что делает регуляторы механического давления с обратной связью.Без этой обратной связи давление будет изменяться каждый раз при изменении потребности в потоке ниже по потоку.
Существует два распространенных типа механических регуляторов давления: поршневые и диафрагменные. Регуляторы поршневого типа имеют тенденцию быть прочными и хорошо работать в приложениях, где требуется повышенная жесткость. Однако они действительно испытывают некоторый гистерезис в результате трения между уплотнением поршня и корпусом регулятора. Они не предназначены для использования в приложениях, где давление на выходе должно поддерживаться в жестких пределах.Регуляторы поршневого типа отлично подходят для применений, где долговечность важнее точности. Например, если давление воздуха в вашем магазине составляет 90 фунтов на квадратный дюйм, а номинальное давление клапана составляет 60 фунтов на квадратный дюйм, можно использовать поршневой регулятор, чтобы сбить давление, чтобы вы не повредили клапан.
Если регулятор должен регулировать низкое давление или высокую точность, рекомендуется регулятор мембранного типа. В мембранных регуляторах используется дисковая мембрана, обычно сделанная из эластомера, для определения изменений давления, что устраняет трение, испытываемое регуляторами поршневого типа.Уменьшение трения приводит к повышению точности и точности, что делает эти регуляторы идеальными для приложений, требующих точного, повторяемого контроля давления; это может включать медицину, полупроводники и большинство приложений в области наук о жизни.
Механические регуляторы давления
— отличный вариант для применений, где давление и поток на входе имеют лишь незначительные колебания, а пользователь хочет «настроить и забыть». Однако, как и в случае с регуляторами расхода, для некоторых приложений может потребоваться переменное выходное давление, дистанционное управление, автоматизация, сбор данных или лучшая воспроизводимость, для чего потребуется электронный регулятор давления (EPR).
Наиболее распространенная конфигурация электронного регулятора давления (EPR) — это 2 клапана и датчик. Один впускной клапан, один выпускной клапан и датчик внутреннего давления, активно измеряющий давление на выходе и непрерывно обеспечивающий обратную связь с аналоговой или цифровой печатной платой. Генератор командных сигналов (обычно ПЛК) используется для подачи на EPR заданного значения команды. Например, сигнал 0–10 В постоянного тока (существует множество вариантов), непосредственно приравниваемый к калиброванному диапазону EPR, в данном случае 0–100 фунтов на кв.Команда напряжения в диапазоне от нуля до десяти вольт приводит к эквивалентному (в процентах от полной шкалы) выходному давлению. Например, при команде 5 В постоянного тока (50%) впускной клапан открывается, позволяя снизить давление ниже по потоку. Впускной клапан остается открытым до тех пор, пока внутренний датчик не скажет: «Эй, я измеряю 5 В постоянного тока (50 фунтов на кв. Дюйм), теперь вы можете закрыть». Если поток на выходе увеличивается, давление падает, и датчик мгновенно определяет отклонение от команды 5 В постоянного тока. Впускной клапан снова открывается, пока датчик не удовлетворителен.Эта взаимосвязь и автоматизированный процесс распространяется на весь диапазон и известен как линейное и пропорциональное электронное управление с обратной связью.
Выбор правильного регулятора подачи жидкости
При проектировании пневматической системы можно выбирать из множества различных средств управления жидкостью. Понимание того, пытаетесь ли вы контролировать силу (давление) или скорость (поток), — это первый шаг к выбору управления жидкостью, которое подходит именно вам. Кроме того, ваше приложение определяет, можете ли вы использовать механическое управление или вам нужно электронное управление, и может ли оно быть разомкнутым или должно быть замкнутым.
Если у вас есть вопросы о том, какой контроль потока следует использовать для своего приложения, свяжитесь с [email protected] для получения дополнительной поддержки.
Связанное содержимое
Элементы управления с обратной связью Глава 3
Элементы управления с обратной связью Глава 3
3
Элементы управления с обратной связью
3.1 ЦЕЛИ И ВВЕДЕНИЕ
Объективы
1.Знайте определение следующих терминов: ввод, вывод, обратная связь, ошибка, открытие.
цикл и замкнутый цикл.
2. Понять принцип управления с обратной связью.
3. Понять, как следующие процессы связаны с методом замкнутого цикла
управление: обратная связь по положению, обратная связь по скорости и обратная связь по ускорению.
4. Понять принцип демпфирования и его влияние на работу системы.
5. Уметь объяснить преимущества управления с обратной связью в системе оружия.
6. Уметь математически моделировать простые системы первого порядка.
Введение
Элементы теории управления с обратной связью могут быть применены к широкому кругу физических систем.
Однако в технике это определение обычно применяется только к тем системам, основная функция которых
заключается в том, чтобы динамически или активно командовать, направлять или регулировать себя или другие системы. Мы будем
далее ограничим наше обсуждение системами управления вооружением, которые включают в себя серию измерений
и вычисления, начиная с обнаружения цели и заканчивая перехватом цели.
3.2 ТЕРМИНОЛОГИЯ СИСТЕМЫ УПРАВЛЕНИЯ
Чтобы обсудить системы управления, мы должны сначала определить несколько ключевых терминов.
— Ввод. Стимул или возбуждение, приложенные к системе управления от внешнего источника,
обычно для того, чтобы произвести
указанный ответ от системы.
— Выход. Фактический ответ, полученный от системы.
— Обратная связь. Та часть вывода системы, которая
вернулся, чтобы изменить ввод и, таким образом, служить перформансом
монитор для системы.
— Ошибка . Разница между входным стимулом и
выходной ответ. В частности, это разница между
вход и обратная связь.
Очень простым примером системы управления с обратной связью является
термостат. Вход — это температура, которая изначально установлена
в устройство. Затем выполняется сравнение между вводом и
температура внешнего мира. Если они разные,
Ошибка Результат и вывод , который активирует нагрев или
охлаждающее устройство.Компаратор внутри термостата постоянно
замеряет температуру окружающей среды, то есть обратную связь , до тех пор, пока
ошибка равна нулю; выход затем отключает нагрев или охлаждение
устройство. Рисунок 3-1 представляет собой блок-схему простого управления с обратной связью.
система.
Другие примеры:
(1) Система управления рулем направления
(2) Директор пушки или ракеты
(3) Система наведения ракеты
(4) Снаряды с лазерным наведением
(5) Автопилот
3.3 ЗАКРЫТЫЕ И РАЗРЫВНЫЕ СИСТЕМЫ
Системы управления с обратной связью, используемые в системах вооружения, классифицируются
как замкнутые системы управления . Замкнутая система — это одна в
управляющее воздействие которого зависит от выхода системы.
Это видно из рисунка 3-1 и предыдущего описания
термостат, который представляет собой примеры управления с обратной связью
системы. Системы с обратной связью не зависят от выхода.
3.3.1 Характеристики замкнутых систем
Основные элементы системы управления с обратной связью показаны на рисунке.
3-1.Система измеряет выход и сравнивает измерения
с желаемым значением выхода, как предписано входом.
Он использует ошибку (т. Е. Разницу между фактическим выводом
и желаемый результат), чтобы изменить фактический результат и привести его
в более точное соответствие с желаемым значением.
Поскольку произвольные возмущения и нежелательные колебания могут
возникают в различных точках системы, система управления с обратной связью
должен уметь отклонять или отфильтровывать эти колебания и выполнять
свою задачу с предписанной точностью, при этом точно
представление желаемого результата как возможного.Эта функция
фильтрация и сглаживание достигается различными электрическими и
механические компоненты, гироскопические устройства, акселерометры и т. д., а также с использованием различных типов обратной связи . Обратная связь по положению есть
тот тип обратной связи, используемый в системе, в которой выход
либо линейное расстояние, либо угловое смещение, а часть
вывода возвращается или возвращается на ввод. Позиция
обратная связь важна в системах управления вооружениями и используется для
сделать вывод точно таким же, как и ввод.Например: если в
система управления ракетной установкой, пропала обратная связь по положению,
реакция системы на входной сигнал на поворот по часовой стрелке на 10o будет
быть непрерывным поворотом по часовой стрелке, а не
соответствие позиции пусковой установки порядку ввода.
Сглаживание движения с помощью обратной связи осуществляется
использование скорости и обратной связи ускорения. В случае ставки
(скорость) обратная связь, часть выходного смещения составляет
дифференцированы и возвращены, чтобы ограничить скорость
выход.Обратная связь при ускорении достигается путем дифференцирования
часть выходной скорости, которая при обратной передаче служит
дополнительное ограничение на вывод системы. Результат обоих
обратная связь по скорости и ускорению должна помочь системе в достижении
изменения положения без перерегулирования и колебаний.
Наиболее важные особенности, которые отрицательные отзывы придают
АСУ ТП:
(1) Повышенная точность — Повышение способности системы
точно воспроизводить на выходе то, что продиктовано
вход.
(2) Пониженная чувствительность к помехам — При колебаниях
отношение выхода системы к вводу, вызванное изменениями внутри
система сокращена. Значения компонентов системы меняются
постоянно на протяжении всей жизни, но, используя самокорректирующийся аспект обратной связи, последствия этих изменений могут быть
сведены к минимуму.
(3) Сглаживание и фильтрация — Когда нежелательные эффекты
шум и искажения в системе уменьшаются.
(4) Увеличенная пропускная способность — Когда пропускная способность любой системы
определяется как диапазон частот или изменения входного сигнала
на которые система удовлетворительно ответит.
3.3.2 Блок-схемы
Из-за сложности большинства систем управления сокращение
графическое изображение взаимосвязи между вводом и
выход был разработан. Это представление обычно называют
блок-схема. Системы управления состоят из различных комбинаций
следующих основных блоков.
Элемент. Простейшее представление компонентов системы.
Это помеченный блок, передаточная функция которого (G) является выходом
делится на вход.
Суммирующая точка. Устройство для сложения или вычитания двойки.
или несколько сигналов.
Точка разделения. Точка, в которой входящая переменная должна быть
передается идентично двум точкам на диаграмме. это
иногда называют «точкой взлета».
Элементы управления или прямой связи (G). Эти компоненты
непосредственно между управляемым выходом и указанным входом.
Ссылочная переменная или Вход (r). Подан внешний сигнал
в систему управления для получения желаемого результата.
Отзыв (б). Сигнал, определяемый выходом, измененный
элементами обратной связи, используемыми по сравнению с входным сигналом.
Контролируемый выход (c). Переменная (температура, положение,
скорость, угол вала и т. д.), которые система стремится направить или
регулировать.
Сигнал ошибки (e). Алгебраическая сумма эталонного входа
и обратная связь.
Элементы обратной связи (H). Те компоненты, которые необходимы для создания
желаемый сигнал обратной связи путем измерения контролируемого выхода.
Рисунок 3-3 представляет собой блок-схему простой системы управления с обратной связью.
используя компоненты, описанные выше.
В принятом упрощенном подходе блоки заполняются
значения, репрезентативные для значений компонентов. Выход ( c ) может быть
выражается как произведение ошибки ( e ) и элемента управления
( G ).
c = например (3-1)
Ошибка также является комбинацией входа ( r ) и обратной связи
( б ).
e = r — b (3-2)
Но обратная связь — это продукт результата и обратной связи
элемент ( H ).
b = cH (3-3)
Следовательно, подставляя уравнение (3-3) в уравнение (3-2)
е = г — ч
и из уравнения (3-1)
e = c / G
c / G = r — cH (3-4)
c = Gr — cGH
c + cGH = Gr
c = G r
1 + GH (3-5)
Затем было показано, что рисунок 3-3 можно свести к
эквивалентная упрощенная блок-схема,
G , как показано ниже.
1 + GH
c = rG
1 + GH (3-6)
В отличие от замкнутой системы, разомкнутая система
не контролирует собственный вывод, т.е. не содержит обратной связи
петля. Простая система без обратной связи — это строго вход через
элемент управления. В этом случае:
c = rG
Система без обратной связи не может компенсировать
колебания входного сигнала или ухудшение характеристик элемента управления.
3.3.3 Система управления скоростью двигателя
Если нужно контролировать скорость двигателя, можно использовать
тахометр, который определяет скорость двигателя, выдает выходной сигнал
напряжение пропорционально скорости двигателя, а затем вычитает этот выходной сигнал
напряжение от входного напряжения. Эту систему можно нарисовать блоком
форма диаграммы, как показано на рисунке 3-5. В этом примере
r = входное напряжение системы регулирования скорости
G = характеристика двигателя при 1000 об / мин на вход напряжения
c = скорость двигателя в установившемся режиме в об / мин
H = характеристика тахометра 1 вольт на двигатель 250 об / мин
скорость
Пример.В этом примере предполагается, что входной сигнал не
изменить время отклика системы. Пренебрежение переходным процессом
ответов, установившаяся скорость двигателя может быть определена как
следует:
r = 10 вольт
c = ( e ) (1000) об / мин
e = c вольт
1000
b = c вольт
250
e = r — b
= 10- c вольт
250
Приравнивая два выражения для e и решая для c , как в
уравнение (3-4)
c = 10- c вольт
1000 250
c + 4 c = 10 000 об / мин
c = 2000 об / мин
Наконец, можно найти напряжение ошибки
e = c = 2 вольта
1000
или используя упрощенную эквивалентную форму, разработанную ранее как
уравнение (3-6):
c = r G = 10V 1000 об / мин / В = 2000 об / мин
1 + GH 1 + 1000 об / мин 1V
V 250 об / мин
e = c = 2000 об / мин = 2 В
G 1000 об / мин
В
3.4 ОТВЕТ В СИСТЕМАХ КОНТРОЛЯ ОБРАТНОЙ СВЯЗИ
В вооружении системы управления с обратной связью используются для различных целей.
и должны соответствовать определенным требованиям к производительности. Эти требования
не только влияют на такие вещи, как скорость ответа и точность, но
а также способ, которым система реагирует при выполнении своих
функция управления. Все системы содержат определенные ошибки. Проблема
заключается в том, чтобы удерживать их в допустимых пределах.
3.4.1 Демпфирование
Приводные устройства системы вооружения должны быть способны развивать достаточный крутящий момент и мощность для позиционирования груза за минимальное время подъема .В системе двигатель и подключенная к нему нагрузка обладают достаточной инерцией.
для перемещения нагрузки за точку желаемого положения, определяемую входным сигналом. Превышение приводит к противоположному
сигнал ошибки, меняющий направление вращения двигателя и
Загрузка. Двигатель снова пытается исправить ошибку и снова
выходит за желаемую точку, причем каждый разворот требует меньше
коррекция до тех пор, пока система не придет в равновесие с входным стимулом. Время, необходимое для затухания колебаний до
желаемый уровень часто называют временем установления . Величина
Время оседания сильно зависит от степени вязкости
трение в системе (обычно обозначается как демпфирование ). Как
степень вязкого трения или демпфирования увеличивается, склонность к
перерегулирование уменьшается до тех пор, пока, наконец, не происходит перерегулирования. В качестве
демпфирование дополнительно увеличивается, время установления системы
снова начинает увеличиваться.
Рассмотрим систему, изображенную на рисунке 3-6. Масса
прикреплен к жесткой поверхности с помощью пружины и демпфера и
может свободно перемещаться влево и вправо на скольжении без трения.Бесплатный
Диаграмма силового тела изображена на рисунке 3-7.
Согласно законам движения Ньютона, любая конечная равнодействующая
внешние силы, приложенные к телу, должны приводить к ускорению
этого тела, то есть:
F = Ma
Таким образом, силы складываются с системой отсчета
тщательно отмечены, чтобы определить правильные знаки, и установлены равными
продукт массы и ускорения.
F (t) — Fspring — Fdashpot = Ma (3-7)
Сила пружины пропорциональна
разница между его длиной покоя и его мгновенной длиной.Константа пропорциональности называется постоянной пружины и равна
обычно обозначается буквой K , с единицами измерения Ньютон на
метр ( Н / м).
Fspring = Kx
Сила, оказываемая приборной панелью, называется демпфированием и
пропорциональна относительной скорости двух механических
части. Константа пропорциональности называется демпфированием.
постоянная и обычно обозначается файлом
Process Control
Process Control может быть определена как функция и операция, необходимая для изменения или остановки устройства или материала химическим или физическим способом.
Существует два основных типа этой системы, которые приведены ниже.
Система без обратной связи — Управление процессами
Это система управления, в которой управляющее воздействие применяется к выходу системы. Такая система просто управляется входом, система управления без обратной связи показана на рисунке ниже,
Процесс управляется путем предоставления входных данных для управления системой разомкнутого контура, чтобы поддерживать выход на желаемом уровне. Уставка разомкнутой системы также называется «Командой».Необходимо достичь идеальной рабочей точки для процесса и наблюдать результат на выходе вручную, так как единственный вход применяется к управлению в виде уставки, поэтому очевидно, что система управления без обратной связи контролирует процесс выполняется вслепую, и контроллер не получает никакой информации в виде обратной связи для управления выходным состоянием процесса.
Система управления без обратной связи дешевле и менее сложна, чем система управления с обратной связью, в то время как эффективность управления этой системы почти равна нулю.
Блок-схема системы с разомкнутым контуром
Заданное значение
Уставка — это вход, который определяет желаемую рабочую точку процесса.
Контроллер
Принимает решение системы на основе входных сигналов, генерирует выходные сигналы, которые приводят в действие исполнительные механизмы для выполнения решения.
Приводы
Преобразует выходные электрические сигналы системы в физические действия.
Процесс
Процесс означает химическое или физическое изменение материала.
Нарушение
У каждого процесса есть одно или несколько нарушений; Нарушение имеет тенденцию изменять управляющие переменные.
Замкнутая система
Система с обратной связью является одной из систем управления, в которой обратная связь, полученная от выхода, а затем эта обратная связь является подачей, применяется к компаратору для сравнения с уставкой, а затем ошибка применяется к следующей схеме. , Принцип работы и блок-схема замкнутой системы показаны на рисунке ниже.
Блок-схема системы с замкнутым контуром
Уставка
Это вход, который определяет желаемую рабочую точку для процесса.
Компаратор
Используется для получения разницы между фактическим выходом и уставкой, сигнал уставки подается на положительный вывод, а выходной датчик — на отрицательный вывод.
Если отрицательный вывод имеет низкий потенциал, то компаратор потенциала положительного вывода генерирует положительный сигнал, который используется для управления конечным элементом управления после усиления.
Усилитель ошибки
Он усиливает сигнал ошибки и передает его контроллеру, потому что сигнал ошибки очень слаб по амплитуде, он не может напрямую управлять контроллером, поэтому этот слабый сигнал усиливается усилителем ошибки.
Контроллер
Он выдает выходной сигнал для процесса на основе входного сигнала ошибки.
Выходной аттенюатор
Управляет выходом каскада контроллера и входом состояния процесса.
Обратная связь датчика
Он обеспечивает ввод от процесса для уставки или компаратора, который сравнивает уставку и сигналы обратной связи.
Нарушение
Каждый обрабатывает одно или несколько возмущений, которые имеют тенденцию изменять управляемую переменную. Основная функция замкнутой системы управления технологическим процессом — регулирование значения контролируемых переменных, когда возмущение меняет его.
.