Устройство для управления однофазным асинхронным электродвигателем. Управление однофазным электродвигателем
|
Один из самых широко распространенных типов однофазных электродвигателей это двигатель с двумя обмотками на статоре. При этом сдвиг тока протекающего по обмоткам обеспечивается за счет конденсатора размещенного в одной из обмоток. Величина сдвига равняется 90 электрическим градусам. Именно такая разница позволяет обеспечить появление вращающего магнитного поля. Подобные двигатели называются конденсаторными. Об одном из вариантов регулирования оборотов такого двигателя при помощи преобразователя частоты с однофазным напряжением на выходе и будет идти речь.Конструктивно преобразователь частоты с однофазным напряжением на выходе представляет из себя четыре IGBT-транзистора объединенные по мостовой схеме. На выходе этого инвертора формируется однофазное напряжение с переменной частотой. Среднеквадратичное значение этого напряжения имеет явно выраженную вольт-частотную зависимость. Конденсатор, размещенный в одной из обмоток двигателя позволяет получить поле по своим характеристикам близкое к круговому. К преобразователям частоты с однофазным выходом есть ряд специфических требований, которые отличают их от обычных преобразователей с трехфазным выходом. Во первых на программном уровне в этих преобразователях реализованы специальные алгоритмы управления транзисторным мостом. Эти алгоритмы дают возможность достичь устойчивого пуска однофазного двигателя. Второе преимущества данных алгоритмов состоит в том, что двигатели работают достаточно стабильно в режиме работы с изменение оборотов. Основная задача специальных алгоритмов состоит в том что бы на начальном этапе разогнать однофазный двигатель до номинальных оборотов, а затем регулировать обороты вверх и вниз. Глубина регулирования для таких преобразователей не очень велика. Как правило, она не превышает соотношения 1:10. Однако для многих задач этого значения вполне достаточно. Причина столь узкого диапазона регулирования состоит в том что в одной из обмоток установлен конденсатор. Как известно емкостное сопротивление напрямую зависит от частоты. Еще один существенный недостаток данного варианта регулирования состоит в том, что нет возможности изменять направление вращения вала двигателя.В качестве преимущества использования таких преобразователей можно указать простоту проектирования, монтажных работ и эксплуатации. Дело в том, что использование специализированных преобразователей для регулирования скорости однофазных двигателей не требует внесения изменений в конструкцию самих двигателей. Еще один несомненный плюс состоит в широких возможностях организации управления. В конструкции таких преобразователей, как правило, включены аналоговые и дискретные входа/выхода, ПИД-регулятор, защитные функции и т.д.Таким образом, применение преобразователей частоты с однофазным выходным напряжением для регулирования оборотов однофазных конденсаторных двигателей является весьма привлекательным решением. Другие публикации по теме управление однофазным двигателем: Используем частотный преобразователь для однофазного двигателя.
|
 Преимущества регулирования скорости электродвигателей очевидны для каждого инженера. Это не только достижение необходимых технологических показателей проектируемой системы. Регулирование оборотов двигателей дает еще и энергосбережение, снижение уровня акустического шума.В этой статье мы рассмотрим способ регулирования оборотов однофазного электродвигателя при помощи преобразователя частоты с однофазным напряжением на выходе.
Преимущества регулирования скорости электродвигателей очевидны для каждого инженера. Это не только достижение необходимых технологических показателей проектируемой системы. Регулирование оборотов двигателей дает еще и энергосбережение, снижение уровня акустического шума.В этой статье мы рассмотрим способ регулирования оборотов однофазного электродвигателя при помощи преобразователя частоты с однофазным напряжением на выходе.www.i380.ru
Способ управления однофазным индукторным электродвигателем со стартовыми полюсами (варианты)
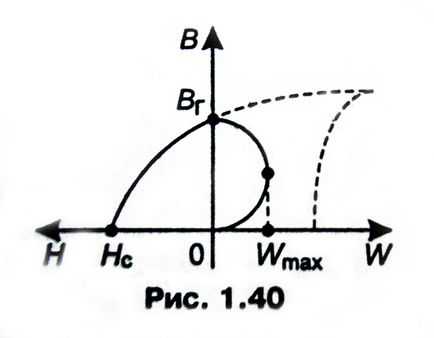
Использование: в бытовой технике, например для стиральных машин и компрессоров холодильников, и предназначено для управления однофазными индукторными электродвигателями со стартовыми полюсами. Сущность изобретения: при пуске двигателя сначала выполняют включение обмотки стартовых полюсов независимо от сигнала датчика положения ротора, затем включается обмотка управления в соответствии с сигналами от датчика положения ротора, а при реверсе первое включение независимо от сигнала датчика положения ротора осуществляется для обмотки управления, после чего по сигналу датчика положения ротора осуществляют включение обмотки стартовых полюсов и далее, в соответствии с инвертированными сигналами датчика положения ротора, осуществляется питание обмотки управления. При наличии на валу неподвижного ротора момента трения покоя предлагается использовать способ пуска, при котором в отличии от указанного выше перед подачей токовых импульсов в обмотку управления по сигналу от датчика положения последовательно подаются три токовых импульса в стартовую обмотку, обмотку управления и вновь в стартовую. При этом два последних импульса подаются в случае попадания ротора в мертвое положение. При реверсе очередность подачи импульсов меняется. 2 с.п. ф-лы, 3 ил.
Изобретение относится к электротехнике, а точнее к электрическим машинам для бытовой техники, например для стиральных машин и компрессоров холодильников, и предназначено для управления однофазными индукторными электродвигателями со стартовыми полюсами.
Известен электропривод на базе однофазного индукторного двигателя, имеющего постоянные магниты для обеспечения стартового положения ротора при пуске. Способ управления указанным двигателем состоит в том, что в однофазную обмотку подаются импульсы тока при прохождении роторов угловых положений, в которых созданный возбужденными полюсами электромагнитный момент на ротор совпадает по направлению с направлением его вращения. Названные взаимные положения ротора и статора регистрируются датчиком положения ротора. По полученной информации микропроцессор вырабатывает команды управления коммутатором, питающим обмотку двигателя (Патент США N 4616165, H 02 P 1/, 1986). Недостатком данного способа управления однофазным индукторным электродвигателем является неспособность осуществлять реверсивное вращение ротора. Известен однофазный индукторный электродвигатель с основными и дополнительными полюсами на статоре и электронным управлением. На дополнительных полюсах размещены катушки, включенные встречно, устанавливающие ротор в стартовое положение и выполняющие функции датчика положения ротора. Дополнительные полюса сдвинуты с оси симметрии основных полюсов в направлении вращения ротора. Способ управления двигателем состоит в том, что пуск двигателя осуществляется включением катушек дополнительных полюсов, устанавливающих ротор в стартовое положение, а затем по сигналам от обмоток дополнительных полюсов, регистрирующих прохождение зубцов ротора в зоне действия электромагнитного момента заданного направления, электронным коммутатором подаются импульсы тока в основную обмотку (Патент ФРГ N 4012561, H 02 P 7/622, H 02 K 19/04, от 20.04.90). Недостатком данного способа управления однофазным индукторным электродвигателем с дополнительными полюсами является ненадежный пуск двигателя вследствие встречного, то есть трансформаторного, включения катушек дополнительных полюсов и неспособность осуществлять реверсивное вращение. Целью изобретения является обеспечение надежного пуска и реверса однофазного индукторного электродвигателя со стартовыми полюсами. Цель достигается способом управления однофазным индукторным электродвигателем со стартовыми полюсами, состоящем в опережающем включении обмотки стартовых полюсов по отношению к включению обмотки управления основных полюсов, а затем подаче токовых импульсов от электронного коммутатора в обмотку управления основных полюсов по сигналам от датчика положения ротора при вращении ротора по направлению от стартового полюса к ближайшему основному, причем согласно изобретению катушки обмотки стартовых полюсов включают согласно, при пуске в противоположном направлении, совпадающем с направлением вращения ротора от основного полюса к ближайшему стартовому полюсу, независимо от сигнала датчика положения ротора первое включение осуществляют подачей тока в обмотку управления, затем по сигналу датчика положения ротора на включение обмотки управления подают ток в стартовую обмотку и отключают обмотку управления, далее отключают стартовую обмотку по приходу сигнала датчика положения ротора, запрещающего включение обмотки управления, а затем подают токовые импульсы в обмотку управления по инвертированным сигналам датчика положения ротора. Цель достигается также другим способом управления, в котором, в отличие от предыдущего, исключается возможность попадания неподвижного ротора при пуске в мертвую зону, т.е. в зону с электромагнитным моментом, близким к нулю. Такие мертвые зоны имеются как у основного полюса, так и у стартового. С этой целью с использованием логических устройств проверяется выставление ротора в стартовое положение, которое может быть как по отношению к стартовому полюсу, так и по отношению к основному полюсу, что определяется выбранным направлением вращения. Так, при пуске в направлении от стартового полюса к ближайшему основному первый импульс подается в стартовую обмотку. В случае попадания ротора в мертвую зону зубец стартового полюса находится напротив паза ротора, при этом подается импульс в обмотку управления основных полюсов, после чего вновь подается импульс в стартовую обмотку, устанавливающую ротор в стартовое положение. За счет выполнения магнитной системы несимметричной мертвые зоны основного и стартового полюсов смещены относительно друг друга. Именно это позволяет указанной последовательностью включений обмоток полюсов обеспечить надежное выставление ротора в стартовое положение даже при наличии значительного по величине момента трения покоя. Попадание ротора в мертвую зону при первом включении обмотки стартового полюса регистрируются датчиком положения ротора, после чего логическим устройством, например микропроцессором, вырабатываются последующие команды на включение обмоток. При реверсивном вращении порядок включения обмоток полюсов, соответственно, меняется. На фиг. 1 показан однофазный индукторный электродвигатель со стартовыми полюсами; на фиг. 2 схема электронного коммутатора; на фиг. 3 зависимости электромагнитных моментов, создаваемых основными и стартовыми полюсами, при изменении углового положения ротора. Однофазный электродвигатель индукторного типа, показанный на фиг. 1, состоит из магнитопровода статора 1 с основными 2, 3 и стартовыми 4, 5 полюсами с размещенными на них катушками соответственно 6, 7 и 8, 9, ротора 10 с зубцами 11. На полюсах 2, 3 статора 1 имеются зубцы 12 и пазы 13. Оси стартовых полюсов 4, 5 по воздушному зазору смещены с оси симметрии статора в одном направлении так, что ось по воздушному зазору каждого из них образует с осью ближайшего зубца статора угол 1,4 tz, где tz угловое зубцовое деление ротора. Электронный коммутатор, показанный на фиг. 2, состоит из блока управления (БУ), работающего по командам датчика положения ротора (ДПР), основной обмотки управления (ОУ), состоящей из катушек 6 и 7 (фиг. 1), стартовой обмотки (ОС), состоящей из катушек 8 и 9 (фиг. 1), источника питания (ИП) и фильтровой емкости С, инвертора, состоящего из ключей VT1, VT2, VT3 и диодов VD1, VD2, VD3. Катушки 8 и 9 включены согласно. Это обеспечивает значительный синхронизирующий момент для установки ротора в стартовое положение и позволяет использовать его для реверсивного пуска двигателя. Рассмотрим пуск и вращение ротора по часовой стрелке (фиг. 1). При пуске обмотка управления 6 и 7 обесточена. Ротор устанавливается в стартовое положение синхронизирующим моментом Мос от стартовых полюсов 4 и 5, по катушкам которых 8 и 9 протекает ток при включении ключа VT3. Длительность протекания тока в ОС должна быть достаточной для установки ротора в стартовое положение. В результате ротор устанавливается в стартовое положение, в котором ось зубцов 11 ротора 10 совпадает с осью возбужденных стартовых полюсов 4 и 5. Этому положению ротора на фиг. 3 соответствует точка j. При подаче БУ команды на открытие ключей VT1 и VT2 в обмотке управления начинает протекать ток. При этом подается команда на открытие ключа VT3 и ток в ОС затухает в контуре, образованном ОС и обратным диодом VD3. Для обеспечения однонаправленного пуска и вращения ротора по направлению часовой стрелки стартовые полюса 4, 5 смещены с оси симметрии статора 1 по направлению вращения так, что ось стартового полюса 4 по воздушному зазору составляет с осью ближайшего зубца 12 основного полюса 2 статора угол a 50 геометрических или 500 электрических градусов. Аналогично смещен другой стартовый полюс 5. В этом случае при подаче тока в ОУ основными полюсами 2, 3 создается вращающий момент Мп, действующий на ротор и направленный по часовой стрелке, то есть от стартового полюса 4 к ближайшему зубцу 12 основного полюса 2. Под действием вращающего момента Мп ротор 10 начинает вращаться. При достижении ротором положения точки e (фиг. 3), в котором ось зубца ротора совпадает с осью зубца основного полюса, по сигналу датчика положения ротора ключи VT1 и VT2 закрываются и ток уменьшается до нуля, возвращая запасенную реактивную энергию в фильтровую емкость C через диоды VD1 и VD2. В противном случае на ротор начнет действовать вращающий момент обратного знака. За счет накопленной кинетической энергии при обесточенных обмотках ОУ и ОС ротор достигает положения точки h (фиг. 3), в котором ось зубца 11 ротора 10 совпадает с осью паза 14 основного полюса. В этом положении БУ подается команда на открытие ключей VT1 и VT2 и в ОУ появляется ток, обеспечивающий при дальнейшем вращении ротора 10 положительный вращающий момент Моу, который увеличивает частоту вращения. При достижении ротором углового положения точки i (фиг. 3), в котором ось зубца 11 ротора совпадает с осью зубца 13 основного полюса, ключи VT1 и VT2 вновь закрываются и т.д. Своевременная подача импульсов тока в ОУ 6, 7 обеспечивается БУ по сигналам от датчика положения ротора относительно статора. Последовательная подача импульсов тока в ОУ увеличивает частоту вращения до необходимого значения. Напряжение на обмотку управления подается от источника питания ИП, например от мостового выпрямителя, к которому параллельно подключена фильтровая емкость C. Для обеспечения пуска и вращения ротора по направлению против часовой стрелки (фиг. 1), т.е. реверса, порядок питания двигателя должен быть следующим. Ротор устанавливается в стартовое положение синхронизирующим моментом Моу основных полюсов, возникающим при подаче в ОУ тока. Ток в ОУ обеспечивается командой БУ на открытие VT1 и VT2. Стартовым положением ротора при реверсе является такое положение, в котором оси зубцов ротора совпадают с осями зубцов основных полюсов. Этому положению ротора на фиг. 3 соответствует точка е. БУ подает команду на открытие VT3, в результате чего в стартовую обмотку подается ток. Одновременно обмотка ОУ обесточивается закрытием ключей VT1 и VT2. На ротор действует момент, созданный стартовыми полюсами M' и направленный против часовой стрелки. Под действием M' (в точке e по фиг. 3) ротор начинает вращение против часовой стрелки. Стартовая обмотка закрытием VT3 отключается при включении обмотки управления по инвертированному сигналу ДПР. Указанный сигнал ДПР, по которому БУ разрешает открытие VT1 и VT2 для подачи тока в ОУ, поступает при достижении ротором углового положения, соответствующего на фиг. 3 точке k. При этом часть пути, а именно от точки j до точки k (фиг. 3), ротор проходит под действием вращающего момента Мос от стартовых полюсов, направленного против выбранного направления вращения. Однако импульс момента, полученный ротором от стартовых полюсов при перемещении от точки e до точки j, значительно превышает импульс момента при дальнейшем движении за счет запасенной кинетической энергии от точки j до точки k. Это обстоятельство обеспечивает прохождение ротором положения точки k и попадание в зону действия момента Моу, совпадающего по направлению с выбранным направлением вращения. Для работы БУ при разных направлениях вращения ротора от одного ДПР необходимо при реверсе инвертировать сигнал ДПР. В этом случае при выбранном направлении вращения ротора против часовой стрелки после прохождения ротором положения точки k БУ обеспечит команду на открытие VT1 и VT2. Последовательная подача импульсов тока в ОУ по сигналам ДПР обеспечивает разгон и устойчивое вращение ротора против часовой стрелки. В процессе вращения ротора стартовая обмотка не включается. Таким образом обеспечивается вращение ротора в любом направлении. При этом стартовая обмотка включается только один раз за цикл работы двигателя в одном направлении. Ниже предлагается другой способ пуска двигателя, обладающий более высокой надежностью и обеспечивающий пуск даже при наличии значительного момента трения покоя. При заданном направлении вращения по часовой стрелке и наличии некоторой статической нагрузки Мн (фиг. 3) на валу неподвижного ротора, последний может оказаться в мертвой зоне, ограниченной вертикальными линиями q и p. В этой зоне электромагнитный момент, развиваемый возбужденными стартовыми полюсами 4 и 5, оказывается меньше Мн в силу того, что пазы ротора расположены практически против полюсов 4 и 5. Таким образом, случайно оказавшись в мертвой зоне, ротор не сможет занять необходимого стартового положения для надежного пуска по часовой стрелке. При этом в соответствии с основным режимом работы, описанным выше, в мертвой зоне для полюсов 4, 5 ключи VT1 и VT2 закрыты по командам БУ согласно сигналам ДПР. Для обеспечения надежного пуска по направлению часовой стрелки в случае остановки ротора в мертвой зоне, о чем будет свидетельствовать сигнал от ДПР после подачи тока в обмотку стартовых полюсов ОС, подается ток в основную обмотку ОУ. Одновременно с этим ОС обесточивается. В этом случае ротор под действием как минимум момента Мо, созданного основными полюсами 2 и 3, перемещается против часовой стрелки на небольшой угол и занимает положение, в котором оси зубцов ротора и зубцов основных полюсов 2 и 3 совпадают. Этому положению ротора на фиг. 3 соответствует точка е. В результате ротор выходит из мертвой зоны стартовых полюсов 4 и 5, после чего ОУ обесточивается. После этого вновь подается ток в стартовую обмотку ОС и ротор под действием момента М', созданного полюсами 4 и 5, перемещается против часовой стрелки до положения, в котором оси зубцов ротора и стартовых полюсов 4 и 5 совпадают. Этому положению ротора на фиг. 3 соответствует точка j. Таким образом, распознав с помощью ДПР попадание ротора в мертвую зону, БУ последовательным включением ОУ и ОС обеспечивает установку ротора в стартовое положение для вращения по часовой стрелке. Дальнейший пуск из стартового положения и разгон осуществляется подачей токовых импульсов в ОУ по сигналам ДПР, аналогично описанному выше пуску и разгону ротора по направлению вращения часовой стрелки. При вращении против часовой стрелки при первом включении обмотки управления для установки ротора в стартовое положение также возможно попадание ротора в мертвую зону, ограниченную на фиг. 3 вертикальными линиями v и w. Выведение ротора из этой мертвой зоны осуществляется также последовательной подачей двух дополнительных импульсов тока, соответственно, в обмотку ОС, затем в ОУ. Таким образом обеспечивается пуск в любом направлении вращения при статическом моменте сопротивления на валу Мст (фиг. 3), величина которого зависит от углового сдвига между осями основных и стартовых полюсов. Анализ возникающих при пуске и реверсе ситуаций и выработку необходимых команд управления при практической реализации предлагаемого способа управления осуществляет микропроцессор. Предложенные способы управления обеспечивают надежный пуск и реверс однофазного индукторного электродвигателя со стартовыми полюсами, что позволяет использовать его для привода различных устройств со сложными условиями пуска.Формула изобретения
1. Способ управления однофазным индукторным электродвигателем со стартовыми полюсами, смещенными относительно оси симметрии статора, заключающийся в том, что подают ток в обмотку стартовых полюсов, а затем подают однополярные импульсы тока в обмотку управления с учетом сигналов от датчика положения ротора при вращении ротора по направлению от стартового полюса к ближайшему основному, отличающийся тем, что одновременно с подачей однополярных импульсов тока в обмотку управления обесточивают обмотку стартовых полюсов, а при вращении ротора от основного полюса к ближайшему стартовому полюсу сначала подают ток в обмотку управления, затем по сигналу датчика положения ротора на подачу тока в обмотку управления подают ток в обмотку стартовых полюсов и обесточивают обмотку управления, затем обесточивают стартовую обмотку по приходу сигнала датчика положения ротора, запрещающего включение обмотки управления, и подают однополярные импульсы тока в обмотку управления с учетом инвертированных сигналов датчика положения ротора. 2. Способ управления однофазным индукторным электродвигателем со стартовыми полюсами, смещенными относительно оси симметрии статора, заключающийся в том, что подают ток в обмотку стартовых полюсов, а затем подают однополярные импульсы тока в обмотку управления основных полюсов с учетом сигналов от датчика положения ротора при вращении ротора по направлению от стартового к ближайшему основному, отличающийся тем, что при сигнале с датчика положения ротора, разрешающем включение обмотки управления, в момент подачи однополярных импульсов тока в обмотку управления обесточивают стартовую обмотку, при отсутствии такого сигнала обесточивают стартовую обмотку и кратковременно подают ток в обмотку управления, затем в стартовую обмотку, а затем в момент подачи однополярных импульсов в обмотку управления обесточивают стартовую обмотку, а при вращении ротора от основного полюса к ближайшему стартовому независимо от сигналов датчика положения ротора подают ток в обмотку управления, которую затем обесточивают, и подают ток в стартовую обмотку по приходу сигнала датчика положения ротора на включение обмотки управления, которую обесточивают по приходу сигнала датчика положения ротора, запрещающего включение обмотки управления, и по инвертированному сигналу датчика положения подают однополярные импульсы тока в обмотку управления, при отсутствии сигнала с датчика положения на включение обмотки управления независимо от сигналов датчика положения ротора выполняют последовательную подачу тока сначала в стартовую обмотку, потом вновь в обмотку управления, а затем по сигналу датчика положения ротора, разрешающего включение обмотки управления, подают ток в стартовую обмотку, которую обесточивают по приходу сигнала датчика положения ротора, запрещающего включение обмотки управления, и по инвертированным сигналам датчика положения ротора подают токовые импульсы в обмотку управления.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3www.findpatent.ru
Несколько способов управления однофазным асинхронным двигателем
Достоинства и недостатки различных способов управления асинхронными двигателями. Выводы, сделанные по опыту практического применения.
В настоящее время получили большое распространение асинхронные электродвигатели с короткозамкнутым ротором. Это вызвано тем, что такие машины не имеют щеточного узла, их ротор сделан из алюминия и технологически очень прост, а значит, сама конструкция получается очень надежной. Рассмотрим несколько способов управления однофазным асинхронным электродвигателем.
Конденсаторный однофазный электродвигатель
Наиболее распространенным типом асинхронного однофазного электродвигателя является двигатель с двумя статорными обмотками. Первая и вторая обмотки идентичны по количеству витков, но последовательно с одной из обмоток включают конденсатор. Конденсатор обеспечивает сдвиг фаз между обмотками для образования вращающегося магнитного поля для ротора.
Частотный способ управления
Основным способом управления таким двигателем, применяемым в настоящее время, является частотный способ. Этот способ реализуется с помощью специальных приборов, называемых ШИМ инверторами. Эти инверторы, в свою очередь, бывают однофазными и трехфазными, что определяется количеством пар силовых выходов для управления обмотками двигателя. Для управления однофазным двигателем может быть применен как однофазный, так и трехфазный инвертор.
Управление однофазным ШИМ инвертором
При таком управлении обе обмотки двигателя включены параллельно. Два выхода инвертора подключаются к точкам соединения обмоток. Инвертор формирует напряжение с варируемой частотой и с линейной зависимостью напряжение к частоте. Регулировать частоту можно как вниз, так и вверх. Диапазон регулировки обычно не превышает 1:10, т.к. емкость конденсатора в одной из обмоток напрямую зависит от частоты.
Достоинства
Основные достоинства этого метода – это простота ввода в эксплуатацию, не требующая переделки конструкции двигателя; надежная работа, т.к. частотный преобразователь специально разработан для управления такими типами двигателей; хорошие характеристики ( ПИД-регулятор, предустановленные скорости, низкий пусковой ток, защитные функции и т.д.)
Недостатки
К недостаткам относятся: только однонаправленное вращение; более высокая стоимость и дефицит однофазных преобразователей по сравнению с трехфазными, по причине их малого выпуска.
Управление трехфазным ШИМ инвертором
В данном случае обмотки двигателя включают последовательно. Выходы трехфазного преобразователя подключают к средней точке и к концам обмоток электродвигателя. Конденсатор при этом из схемы исключают (требуется некоторая переделка двигателя) Так как обмотки двигателя сдвинуты на 90 градусов, а инвертор дает сдвиг фаз на 120 градусов, то поле не будет идеально круговым и это отрицательно скажется на параметрах регулирования.
Поле будет пульсирующим. Так как порядок коммутации выводов инвертора можно менять программным путем, то легко добиться изменения чередования напряжений на обмотках, следовательно, менять направление вращения ротора двигателя.
Достоинства
К достоинствам следует отнести: доступность на рынке и сравнительно низкую цену; возможность реверсивной работы обычного нереверсивного двигателя; более широкий, чем у однофазного преобразователя диапазон регулировки; возможности программируемых функций как у однофазного инвертора или даже шире за счет большего количества коммутируемых выходов.
Недостатки
Недостатки это: пониженный и пульсирующий момент однофазного двигателя; повышенный его нагрев; не все стандартные преобразователи готовы для такой работы, т.к. некоторые производители прямо запрещают использовать свои изделия в таком режиме.
Фазовое управление с помощью симисторного регулятора ( диммера)
Этот метод самый «древний», он обусловлен отсутствием до недавнего времени в широкой продаже частотных регуляторов и их относительно высокой ценой. При таком управлении обмотки двигателя остаются включенными параллельно. Одна из обмоток включена последовательно с фазосдвигающим конденсатором. К точкам параллельного соединения обмоток подключается симисторный регулятор.
На выходе этого регулятора формируется однофазное напряжение с постоянной частотой (50 Гц) и регулируемым среднеквадратическим значением. Это происходит за счет регулирования напряжения открывания симистора, т.е. изменяется время открытого состояния симистора за период следования сетевого напряжения.
Момент на валу двигателя, при таком регулировании, будет снижаться пропорционально напряжению, критическое скольжение будет неизменным.
Достоинства
Основные достоинства: исключительная простота устройства управления; возможность собрать и починить такое устройство любым радиолюбителем; на порядок или даже несколько порядков более низкая цена по сравнению с частотными приводами.
Недостатки
Основные недостатки это: регулирование оборотов только на понижение; диапазон регулирования только 2:1; стабильность скорости только удовлетворительная; допустимая нагрузка резко снижается с уменьшением скорости; перегрев двигателя на низких скоростях, т.к. не хватает производительности встроенного вентилятора двигателя; необходимость завышения мощности двигателя.
Выводы
Исходя из всего вышеперечисленного, необходимо настоятельно рекомендовать применение частотных приводов для управления асинхронными двигателями. Такие приводы (ШИМ инверторы) кроме несомненных удобств по управлению, позволяют получить высокий КПД установок и добиться роста коэффициента мощности (cos фи) до 0.98, т.е. реализовать программу энергосбережения.
Яков Кузнецов, http://electrik.info/
hydromet.com.ru
Устройство для управления однофазными асинхронными двигателями
Читать все новости ➔
В статье приводится описание универсального устройства, которое обеспечивает пуск и торможение однофазного асинхронного конденсаторного двигателя с короткозамкнутым ротором при параллельном включении его вспомогательной обмотки с главной через рабочий конденсатор (КОАД). Устройство также обеспечивает пуск и торможение однофазного асинхронного двигателя с короткозамкнутым ротором с пусковой обмоткой, отключаемой по окончании процесса пуска двигателя (АОД).
Известны устройства для управления КОАД, описанные в [1, 2]. Наиболее близким по технической сущности и достигаемому результату к предлагаемому устройству является устройство для управления двигателем, приведенное в [1], которое обеспечивает пуск и торможение КОАД. Устройство содержит однополюсный переключатель на два положения, с помощью которого подключается к сети главная обмотка двигателя и через фазосмещающий конденсатор - вспомога тельная. Последовательная цепочка из диода, резистора и тормозного конденсатора, который шунтирован обмоткой реле, служит для торможения двигателя, замыкающие контакты реле включены в цепь диода, шунтирующего контакты переключателя в цепи питания КОАД.
Однако такое устройство не обеспечивает управление асинхронным двигателем с пусковой обмоткой, отключаемой по окончании пуска.
Целью предлагаемого технического решения является расширение функциональных возможностей известного устройства.
Данная цель достигается тем, что устройство ля управления КОАД, которое описано в [1], дополнительно снабжено размыкающими контактами герконового реле и выключателем, размыкающие контакты реле включены последовательно с фазосмещающим конденсатором КОАД и шунтированы цепью выключателя.
Сущность предлагаемого технического решения поясняется рис.1, на котором представлена универсальная схема управления асинхронными однофазными двигателями как с рабочим конденсатором - КОАД, так и с пусковой обмоткой, отключаемой по окончании процесса пуска - ОАД (авторское свидетельство автора статьи [3]).
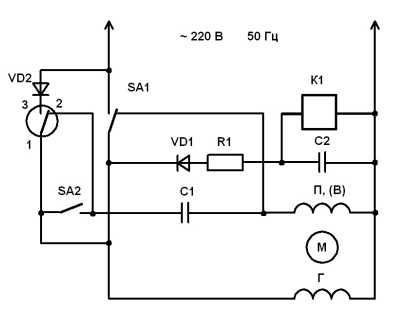
Рис. 1
Описание устройства
Устройство содержит переключатель SA1, с помощью которого подключается к сети главная обмотка «Г» электродвигателя, а также пусковая обмотка «П» через фазосдвигающий элемент - конденсатор С1 и размыкающие контакты 1-2 герконового реле К1, параллельно которым включен выключатель SА2. Обмотка К1 реле шунтирована времязадающим конденсатором С2 и подключена к зажимам главной обмотки «Г» электродвигателя через резистор R1 и диод VD1, который катодом соединен с переключателем SA1. Контакты переключателя SA1 в цепи главной обмотки «Г» электродвигателя шунтированы последовательной цепочкой из замыкающих контактов 1-3 реле К1 и диода VD2.
При пуске электродвигателя с пусковой обмоткой «П», отключаемой по окончании пуска (двигатель ОАД), контакты выключателя SA2 должны быть разомкнуты. При пуске электродвигателя с обмоткой «В» (вспомогательная), не отключаемой по окончании пуска (двигатель КОАД), контакты выключателя SА2 должны быть замкнуты.
Работа устройства
При пуске электродвигателя с пусковой обмоткой (АОД), размыкают выключатель SA2 и включают переключатель SA1 («Пуск»). В этом случае обтекается током главная обмотка «Г» и пусковая «П» через фазосдвигающий конденсатор С1 и замкнутые контакты 1-2 реле К1. АОД запускается. Одновременно протекает ток через последовательную цепочку из диода VD1, резистора R1 и конденсатора С2. Конденсатор С2 заряжается, и величина тока, протекающего по нему, уменьшается, а через обмотку реле К1 увеличивается. При определенном токе обмотки реле К1 оно переключается и замыкает контакты 1-3. В результате, пусковая обмотка «П» с фазосмещающим элементом С1 отключается контактами 1-2 от сети, а последовательная цепочка из диода VD2 и замкнутые контакты 1-3 шунтирует замкнутые контакты переключателя SA1. Пуск АОД окончен. В течение всего последующего времени работы АОД контакты 1-2 разомкнуты, а контакты 1-3 реле К1 замкнуты.
При отключении АОД от сети переключателем SA1 его обмотки главная «Г» и пусковая «П» соединяются параллельно переключателем SA1 и обтекаются выпрямленным током сети через диод VD2, замкнутые контакты 1-3 реле К1. АОД интенсивно тормозится. По окончании разряда конденсатора С2 на обмотку реле К1, последнее размыкает свои контакты 1-3 в цепи диода VD2, отключая обмотки «Г» и «П» АОД от сети.
Одновременно, устройство обеспечивает пуск и торможение двигателей (КОАД) с постоянно включенными обмотками. В этом случае контакты выключателя SA2 должны быть замкнуты. При включении двигателя обтекается током главная обмотка «Г» через переключатель SA1 и вспомогательная «В» через замкнутые контакты выключателя SA2 и конденсатор С1. В остальном работа схемы при пуске и торможении аналогична вышеописанному за исключением того, что обмотка «В» и конденсатор С1 остаются подключенными к сети через замкнутые контакты выключателя SA2 в течение всего времени работы двигателя.
Таким образом, введение в устройство размыкающих контактов реле и выключателя, изменение взаимосвязей между элементами обеспечивают пуск и динамическое торможение электродвигателя. Также уменьшается искрения контактов включателя «Пуск» SA1 за счет шунтирующего действия цепочки из диода VD2 и контактов реле 1-3. Устройство пригодно не только для конденсаторных двигателей, но и двигателей с пусковой обмоткой, отключаемой по окончании пуска.
Детали и наладка устройства практически ничем не отличаются от указанных в [2].
Литература
- Авторское свидетельство №813641 СССР, М. Кл3. Н 02 Р 3/24, Н 02 К 17/04. Однофазный асинхронный электродвигатель с устройством для динамического торможения / К.В. Коломойцев (СССР). - №2692759 / 24-07: заяв. 07.12.78; опуб.15.03.81 Бюл. №10.
- Коломойцев К.В. Однофазный асинхронный конденсаторный двигатель с устройством для динамического торможения // Электрик. - 2011. - №5. - С.48-49.
- Авторское свидетельство N2984383 СССР, М. Кл3. Н 02 Р 3/24, Н 02 К 17/04. Однофазный асинхронный электродвигатель с устройством для торможения / К.В. Коломойцев (СССР). - №3243286 / 24-07: заяв. 02.02.81.
Автор: Константин Коломейцев, г. Ивано-ФранковскИсточник: Радиоаматор №1/2017
Возможно, Вам это будет интересно:
meandr.org
Устройства управления электродвигателями
Устройство (система) управления электродвигателем (контроллер двигателя) - устройство или группа устройств, которые предназначены для управления электродвигателем.
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Устройства для прямого подключения
Устройства с помощью которых электродвигатель напрямую подключается к источнику питания. Самый простой способ подключения. Небольшие электродвигатели некоторых типов могут быть включены: напрямую в розетку, с использованием выключателя, через автоматический выключатель. Такой способ подключения мгновенно соединяет электродвигатель с сетью питания.
Устройство плавного пуска
Используется для уменьшения пусковых токов асинхронных электродвигателей, что позволяет существенно продлить срок службы двигателя. Устройство плавного пуска используется в задачах, где не требуется управлять скоростью вращения или моментом электродвигателя. При этом для двигателей одинаковой мощности устройство плавного пуска дешевле частотного преобразователя.Сервопривод
Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем (обычно СДПМ).engineering-solutions.ru
Устройство для управления однофазным асинхронным электродвигателем
Изобретение относится к электротехнике и может быть использовано в электроприводах, содержащих однофазные асинхронные электродвигатели. Устройство, включающее в себя входной выпрямительный мост, конденсатор, транзисторный и обратный диодный мосты, однофазный асинхронный электродвигатель, драйверы, логический инвертор и задатчик управляющего напряжения, дополнительно снабжено преобразователем напряжения в частоту, четырехразрядным двоичным счетчиком, четырьмя ждущими мультивибраторами и двумя мультиплексорами. Введение дополнительных цифровых элементов позволило реализовать технический результат - простой и надежный способ формирования сигнала управления преобразователем частоты, обеспечивающим плавный пуск и регулирование частоты вращения электродвигателя во всем рабочем диапазоне при поддержании стабильного вращающего момента. Для реализации устройства использован весьма ограниченный набор стандартных и широко распространенных микросхем, характеризующихся малой стоимостью, весом и габаритами. 2 ил.
Предложение относится к электротехнике и может быть использовано в электроприводах, содержащих однофазные асинхронные электродвигатели.
Известен цифровой модулятор для преобразователя частоты асинхронного электродвигателя (патент RU 2216850, МПК Н03К 7/08, Н02М 7/539, Н02Р 7/42, 20.11.2003), содержащий генератор прямоугольных импульсов, счетчики, триггеры, логические элементы ИЛИ, И, И-НЕ, дешифраторы, формирователь импульсов, сумматоры, регистры, двоично-шестеричный счетчик, схемы ограничения и сброса, входную и выходную шины и шину знака. Модулятор формирует на фазах асинхронного электродвигателя трехфазную квазисинусоидальную систему напряжений переменной частоты и амплитуды.
Недостаток устройства заключается в большом числе логических элементов, входящих в его состав, что снижает надежность, усложняет настройку и увеличивает стоимость, вес и габариты устройства в целом.
Известно устройство и способ управления бесщеточным двигателем, основанные на широтно-импульсной модуляции (патент US 2013/0033208, МПК Н02Р 6/16, 7.02.2013). Устройство содержит бесщеточный двигатель, подключенный к блоку задания управляющего сигнала, включающего в себя центральный процессор, цифроаналоговый преобразователь, формирователь регулируемого синусоидального напряжения, генератор несущего пилообразного напряжения, блок формирования ШИМ управляющего сигнала, блок определения полярности и мостовой однофазный инвертор на транзисторах с драйверами во входных цепях.
Недостатком устройства также является большое количество аналоговых, цифро-аналоговых и цифровых элементов, усложняющих и удорожающих его конструкцию, снижающих надежность и увеличивающих вес и габариты.
Наиболее близким к предлагаемому устройству является мостовой инвертор (патент RU 2223590, Н02М 3/337, 7/219, G05F 1/56, 10.02.2004), содержащий источник питания АС-DC, однофазный транзисторный мост, шунтированный обратным диодным мостом, к выходу которых подключена первичная обмотка трансформатора, и систему управления в виде широтно-импульсного модулятора, состоящего из двухтактного генератора, генератора пилообразного напряжения, двух разделительных диодов, двух компараторов, логического инвертора и задатчика управляющего напряжения.
Недостаток инвертора заключается в том, что он работает на фиксированной частоте и его нельзя использовать в качестве преобразователя частоты для управления работой электродвигателя. Кроме того, содержащиеся в нем генераторы и компараторы усложняют его конструкцию.
Предлагаемое устройство позволяет простым и надежным способом сформировать ШИМ сигнал управления однофазным инвертором, обеспечивающим плавное регулирование скорости вращения двигателя при поддержании момента близким к постоянной величине (U/f=const).
На фиг.1 представлена функциональная схема устройства для управления однофазным асинхронным электродвигателем, на фиг.2 - временные диаграммы на выходах мультиплексоров MS1, MS2 и старшего разряда счетчика CT(8) при различных величинах управляющего напряжения.
Устройство содержит однофазный выпрямительный мост на диодах 1, 2, 3, 4, диагональ переменного тока которого подключена к питающей сети 5, а диагональ постоянного тока - к конденсатору 6 и к диагонали однофазного транзисторного моста на транзисторах IGBT 7, 8, 9, 10, шунтированного обратным диодным мостом на диодах 11, 12, 13, 14, выход которых соединен с обмотками асинхронного однофазного двигателя 15 (двигатель содержит две параллельно соединенные обмотки, с одной из которых последовательно включен фазосдвигающий конденсатор), драйверы 16, 17, 18, 19, связанные с затворами транзисторов 7, 8, 9, 10, логический инвертор 20 и задатчик 21 управляющего напряжения. Задатчик 21 может быть выполнен в виде потенциометра 22, запитанного от источника 23 постоянного напряжения. Устройство снабжено преобразователем 24 напряжения в частоту, четырехразрядным двоичным счетчиком 25, четырьмя ждущими мультивибраторами 26, 27, 28, 29 и двумя мультиплексорами 30, 31. Выход задатчика 21 подключен к входу преобразователя 24, с выходом которого связаны входы мультивибраторов 26, 27, 28, 29 и счетный вход счетчика 25. Первые три разряда счетчика 25 подсоединены к адресным входам «1, 2, 4» мультиплексоров 30, 31, четвертый разряд - через логический инвертор 20 и непосредственно к входам стробирования S мультиплексоров 30, 31. К первым и восьмым информационным входам («00, 07») мультиплексоров 30, 31 подключен выход мультивибратора 26, ко вторым и седьмым входам («01, 06») - выход мультивибратора 27, к третьим и шестым входам («02, 05») - выход мультивибратора 28, к четвертым и пятым входам («03, 04») - выход мультивибратора 29, а выходы мультиплексоров 30, 31 связаны с попарно соединенными между собой входами драйверов 16, 19 и 17, 18 транзисторов 7, 10 и 8, 9, расположенных в диагональных плечах транзисторного моста. Каждый из мультивибраторов 26, 27, 28, 29 снабжен своими RC-цепями, определяющими длительности формируемых мультивибраторами импульсов - Т1, Т2, Т3, Т4.
Устройство для управления однофазным асинхронным электродвигателем работает следующим образом.
При подаче на устройство питающей сети 5 выпрямительный мост на диодах 1, 2, 3, 4 и конденсатор 6 преобразуют переменное входное напряжение в постоянное, запитывающее мосты на транзисторах 7, 8, 9, 10 и диодах 11, 12, 13, 14.
В исходном состоянии движок потенциометра 22 находится в нижнем положении, и управляющее напряжение на выходе задатчика 21 равно нулю. При этом на выходе преобразователя 24 отсутствуют импульсы, на выходах мультивибраторов 26, 27, 28, 29 и мультиплексоров 30, 31 сохраняются низкие потенциалы, транзисторы 7, 8, 9, 10 закрыты и двигатель 15 неподвижен.
При выводе движка потенциометра 22 из нижнего положения вверх на выходе задатчика 21 появляется управляющее напряжение, вызывающее формирование на выходе преобразователя 24 импульсной последовательности, частота которой пропорциональна величине данного напряжения. С приходом первого импульса счетчик 25 устанавливается в нулевое состояние, и на его выходах устанавливается кодовая комбинация 0000. Под действием «0» со старшего разряда счетчика 25, поступающего через инвертор 20 и непосредственно на входы стробирования S мультиплексоров 30 и 31, разрешается работа первого из них и запрещается работа второго. Кроме того, под действием логических нулей, поступающих с младших разрядов счетчика 25 на адресные входы мультиплексора 30, он переводится в состояние, при котором с его выходом соединяется первый информационный вход («00»). Одновременно с приходом первого импульса от преобразователя 24 запускаются мультивибраторы 26, 27, 28, 29. Длительности T1, T2, Т3 и Т4 формируемых ими импульсов увеличиваются при переходе от мультивибратора с меньшим номером к большему и устанавливаются исходя из максимального приближения к классическому ШИМ сигналу во всем заданном диапазоне изменения частоты вращения электродвигателя. В результате с приходом первого импульса от преобразователя 24 на выход мультиплексора 30 проходит самый короткий (T1) импульс от мультивибратора 26, под действием которого драйверы 16, 19 открывают транзисторы 7, 10, и через обмотки электродвигателя 15 протекает импульс тока.
С поступлением от преобразователя 24 второго импульса на выходах счетчика 25 устанавливается кодовая комбинация 0001, под влиянием которой на выход мультиплексора 30 проходит импульс, формируемый мультивибратором 27. При этом транзисторы 7, 10 открываются на время T2. Аналогичным образом с приходом третьего импульса транзисторы 7, 10 открываются на время Т3, четвертого и пятого импульсов - на время Т4, шестого импульса - на время Т3, седьмого - на время T2 и восьмого - на время Т1. В результате через обмотки электродвигателя 15 протекают импульсы тока одной полярности с длительностями, близкими к ШИМ сигналу для первой полуволны синусоиды.
С приходом от преобразователя 24 девятого импульса на выходах счетчика 25 устанавливается кодовая комбинация 1000, под действием которой запрещается работа мультиплексора 30 и разрешается работа мультиплексора 31. При этом формируемый мультивибратором 26 импульс проходит на выход мультиплексора 31, открывая с помощью драйверов 17, 18 транзисторы 8, 9 и вызывая протекание через обмотки электродвигателя 15 импульса тока длительностью Т1 другой полярности. Аналогичным образом создаются и последующие импульсы тока данной полярности, формирующие вторую полуволну синусоиды.
При увеличении управляющего напряжения задатчика тока 21 увеличивается частота импульсов на выходе преобразователя 24 и частота огибающей напряжения на выходе транзисторного моста, питающего обмотки электродвигателя 15. В результате увеличивается скорость его вращения. Вместе с тем уменьшаются паузы между отдельными импульсами, иначе говоря, скважность импульсов, что вызывает увеличение напряжения, прикладываемого к обмоткам электродвигателя 15. Благодаря этому обеспечивается поддержание отношения напряжения к частоте достаточно близким к постоянной величине.
С учетом того, что для формирования полного периода питающего электродвигатель 15 напряжения требуется шестнадцать импульсов преобразователя 24, его частота (частота коммутации) должна в шестнадцать раз превосходить частоту подаваемого на электродвигатель 15 напряжения. Так, при требуемом диапазоне регулирования частоты питающего напряжения от 0 до 50 Гц частота преобразователя 24 должна меняться от 0 до 800 Гц. При этом длительности импульсов, формируемых мультивибраторами 26, 27, 28, 29, могут составлять следующие величины: Т1=0,25 мс; Т2=0,6 мс; Т3=0,85 мс; Т4=1,2 мс. Более точные значения определяются по результатам спектрального анализа полученной ШИМ последовательности. Для повышения качества питающего электродвигатель 15 напряжения может быть вдвое увеличена частота преобразователя 24 при одновременном увеличении разрядности счетчика 25 и мультиплексоров 30, 31 и удвоении числа мультивибраторов 26, 27, 28, 29.
Устройство реализуется на достаточно простых и широко распространенных микросхемах средней степени интеграции. Преобразователь 24 напряжения в частоту может быть выполнен на микросхеме КР1108ПП1, счетчик 25 - на микросхеме К155ИЕ5, мультиплексоры 30,31 - на микросхемах К155КП7, мультивибраторы 26, 27, 28, 29 - на микросхемах К155АГ3 и инвертор 20 - на микросхеме К155ЛН1.
Рассмотренный принцип формирования управляющего ШИМ сигнала может быть также распространен на преобразователь частоты для трехфазного электродвигателя.
Таким образом, предлагаемое устройство реализует достаточно простой и надежный способ управления однофазным асинхронным электродвигателем, характеризуется малыми весом, габаритами и стоимостью, легко настраивается и обладает универсальностью построения.
Устройство для управления однофазным асинхронным электродвигателем, содержащее однофазный выпрямительный мост, диагональ переменного тока которого подключена к питающей сети, а диагональ постоянного тока - к конденсатору и к диагонали однофазного транзисторного моста, шунтированного обратным диодным мостом, выход которых соединен с обмотками однофазного асинхронного двигателя, драйверы, связанные с затворами транзисторов моста, логический инвертор и задатчик управляющего напряжения, отличающееся тем, что оно снабжено преобразователем напряжения в частоту, четырехразрядным двоичным счетчиком, четырьмя ждущими мультивибраторами и двумя мультиплексорами, причем выход задатчика управляющего напряжения подключен к входу преобразователя напряжения в частоту, с выходом которого связаны входы ждущих мультивибраторов и счетный вход четырехразрядного двоичного счетчика, первые три разряда которого подсоединены к адресным входам мультиплексоров, четвертый разряд - через логический инвертор и непосредственно к входам стробирования соответственно первого и второго мультиплексора, к первым и последним информационным входам которых подключен выход первого ждущего мультивибратора, ко вторым и седьмым входам - выход второго ждущего мультивибратора, к третьим и шестым входам - выход третьего ждущего мультивибратора, к четвертым и пятым входам - выход четвертого ждущего мультивибратора, а выходы мультиплексоров связаны с попарно соединенными между собой входами драйверов транзисторов, расположенных в диагональных плечах транзисторного моста.
www.findpatent.ru
Способ управления однофазным шаговым электродвигателем
Союз Советск их
Социалистических
Республик
ОП ИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Н 02 P 8/00
Гаоуаврстесииый комитет
СССР по делам иаобретеиий и открытий
Опубликовано 15.1181. Бюллетень № 42
Дата опубликования описания 15.11.81 (53) УДК 621.3)3..58 (088.8) (72) Лвтор изобретения
В. И. Бондаренко (54) СПОСОБ УПРАВЛЕНИЯ ОД11ОФАЗНЫМ ШАГОВЫМ
ЭЛЕКТРОДВИГАТЕЛЕМ
Изобретение относится к электротехнике и может быть использовано для управления однофазными шаговыми электродвигателями с магнитной фиксацией ротора.
Известен способ управления однофазным шаговым. электродвигателем путем подачи на обмотку управления знакопеременных импульсов напряжения (1).
Недостатком указанного способа является низкое качество движения при обработке шага.
Наиболее близким по технической сущности к предлагаемому является способ управления однофазным шаговым электродвигателем с магнитной фиксацией путем подачи импуль- 15 сов напряжения на обмотки управления и компенсации )2) .
Недостатком этого способа является низкая нагрузочная способность двигателя, так как импульс на дополнительной компенсирующей обмотке действует на время движения ротора двигателя только в качестве компенсатора момента фиксации двигателя.
Цель изобретения — повышение нагрузочкой способности двигателя.
Поставленная цель достигается тем, что после поворота ротора двигателя на угол, близкий к половине шага, изменяют полярность импульса напряжения на обмотке компенсации.
Формирование импульса противоположной полярности и подача его на обмотку компенсации в момент окончания компенсирующего импульса приводит к дополнительному увеличению полезного момента, развиваемого шаговым двигателем, за счет того, что происходит увеличение момента фиксации двигателя во второй половине шага двигателя, где момент фиксации (согласно кривой статического синхронизирующего момента однофазного гармонического шагового электродвигателя) уже участвует в создании полезного крутящего момента двигателя.
На фиг. 1 приведена блок-схема устройства, реализующего способ; на фиг. 2 — временные диаграммы импульсов управления и
„компенсации.
881961
Способ управления однофазным шаговым
40 электродвигателем с магнитной фиксацией путем подачи импульсов йапряжения на обмот. ку управления и компенсации, отличаюшийся тем, что, с целью повышения нагрузочной способности двигателя, после по45 ворота ротора двигателя на. угол, близкий к половине шага, изменяют полярность импульса напряжения на обмотке компенсации.
2. Авторское свидетельство СССР Р 629610, 55 кл. Н 02 К 37/00, 1976 (прототип).
Устройство (фиг. 1), реализующее предлагаемый способ, вклгочает преобразователь 1 непрерывного сигнала Овх в частотно-модулированную последовательность импульсов напряжения, формирователь импульсов 2, преобразующий входные нглпульсы произвольной формы в прямоугольные импульсы требуемой длительности, распределитель 3 импульсов управления, усилитель мощности 4 и шаговый двигатель 5 с обмотками управления 6 и компенсации 7, а также грормирователь 8
1 парных разнополярных импульсов компенсации и усилитель мощности 9. Входы формирователей импульсов 2 и 8 подключены к выходу преобразователя 1.
Способ осуществляется следующим образом.
При поступлении входного напряжения Овх (фиг. 1) на вход преобразователя 1 последний преобразует это напряжение в частотномодулированную последовательность импульсов
И 1 (фиг.2). Далее эти импульсы поступают одновременно на формирователи прямоугольных импульсов 2 и 8, первый иэ которых формирует импульс И 2, необходимьгй для нормальной работы шагового. двигателя 5, а второй формирует на каждый импульс преобразователя 1 одну пару разнополярных компенсирующих импульсов И 8 (фиг. 2), причем первый иэ них, противоположный по полярности импульсу управления (полярности импульсов отмечены знаками "+" и "—" на фиг. 2), поступает на обмотку компенсации одновременно с импульсом 1гправления, а второй формируется сразу после окончания этого импульса, но с противоположной полярностью, и подается в ту же обмотку компен- З5 сации 7. Для оптимальной работы шагового двигателя требуется, чтобы период следования импульсов И 1 преобразователя не был меныне периода следования парных импульсов компенсации И 8.
Импульсы И 2 затем поступают через распределитель 3 (в случае двухтактного maroвого двигателя) и усилитель мощности 4 на обмотку управления б двигателя 5. Импульсы И 8 через усилитель мощности 9 поступают на обмотку компенсации 7, выполненную, например, из двух полуобмоток со, средней точкой и размегцаемую на фиксирующем полюсе двигателя 5, содержащего постоянный магнит N — S
Шаговьгй двигатель работает следующим образом, При обесточенной обмотке управления 6 и обмотке компенсации 7 ротор двигателя 5 фиксируется потоком постоянного магнита
М вЂ” S. При поступлении первого импульса И 2 и лары импульсов И 8 происходит сначала компенсация потока постоянного магнита, фиксирующего ротор двигателя, так как постоянная времени обмотки компенсации выбирается меньше постоянной времени обмотки управления, а затем импульс И 2 создает электромагнитный лоток, приходящий к перемещению ротора. Ротор поворачивается на угол, равный половине шага. После окончания импульса И 2 ротор продолжает перемещение в направлении вращения под ускоряющим воздействием положительной полуволны компенсирующего импульса И 8, который подается в другую полуобмотку компенсации 7, изменяя тем самым направление магнитного потока, Таким образом, увеличивается полезный пусковой момент двигателя, так как скомпенсированный момент фиксации двигателя входит в характеристику статического синхронизирующего момента в начальный момент со знаком "— ", а во второй половине шага — со знаком "+".
После окончания импульса И 8 ротор двига теля фиксируется в новом положении, смещенном на один шаг.
Таким образом, ув ел ич ение раз в иваемого двигателем полезного момента происходит за счет того, что в обмотку компенсации подается в момент окончания компенсирующего импульса импульс противоположной полярности, который увеличивает фиксирующий момент двигателя во второй половине шага двигателя.
Нагруэочная способность двигателя повышается при этом на 20 — 30%.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
1. Дискретный электропривод с шаговыми двигателями. Под ред. М. Г. Чиликина, M., "Энергия", 197.1, с. 535-537.
881961
1 ар, О
Заказ 9995/84 Тираж 733 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5
Филиал ППП "Патент", r. Ужгород, ул. Проектная, 4
Составитель 3. Горник
Редактор Л. Повхан Техред T.Ìàòî÷êà Корректор Л. Бокшан
www.findpatent.ru





Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






