
Асинхронный двигатель- Принцип работы и устройство… Motoran.ru
В какой бы сфере не участвовал человек, повсюду применяются электрические моторы. Сегодня изделия задействованы как в промышленности, так и в быту. Механизмы несут массу положительных качеств: простота, надёжность, долговечность, экологическая чистота. Характеристики дают моторам охватывать большее количество незанятых ниш, изделия уже вплотную используются в автомобилестроении.
Среди разновидностей, по количеству произведённых электрических машин, асинхронный двигатель занимает первое место. Относительная дешевизна и универсальность мотора при эксплуатации стали решающим фактором, повлиявшим на массовость выпуска. Перспективы развития агрегатов увеличиваются, поскольку сегодня нет, чище способа получить механическую работу, чем использовать электричество. В реалиях, целесообразность экологических аспектов растёт с каждым годом в геометрической прогрессии, поэтому рассмотрим установку детально.
Асинхронный двигатель в разрезе:
История асинхронного двигателя
Начало развития асинхронных двигателей было положено в 88 году девятнадцатого века, когда итальянский электротехник Галилео Феррарис опубликовал в Турине статью о теоретических основах асинхронного электродвигателя. Ошибочные выводы итальянца о небольшом коэффициенте полезного действия асинхронных двигателей вызвало большой интерес среди других инженеров. Силы большинства учёных направлены на усовершенствование изделия.
Ошибочные выводы итальянца о небольшом коэффициенте полезного действия асинхронных двигателей вызвало большой интерес среди других инженеров. Силы большинства учёных направлены на усовершенствование изделия.
Итальянский электротехник Галилео Феррарис (1847-1897 года жизни):
После того, как в том же году статью перепечатал английский журнал, её прочитал выпускник Дармштадтского технического училища, М.О. Доливо-Добровольский. Через год, талантливый выходец из Российской Империи получил патент на трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Русский электротехник Доливо-Добровольский (1862-1919 года жизни):
Труды изобретателя положили начало массовому применению электрических двигателей. Так, в Новороссийске в третьем году двадцатого века, под руководством учёного, построен первый в мире элеватор, использовавший промышленную сеть переменного трёхфазного тока с трёхфазными трансформаторами и синхронными двигателями с фазным ротором.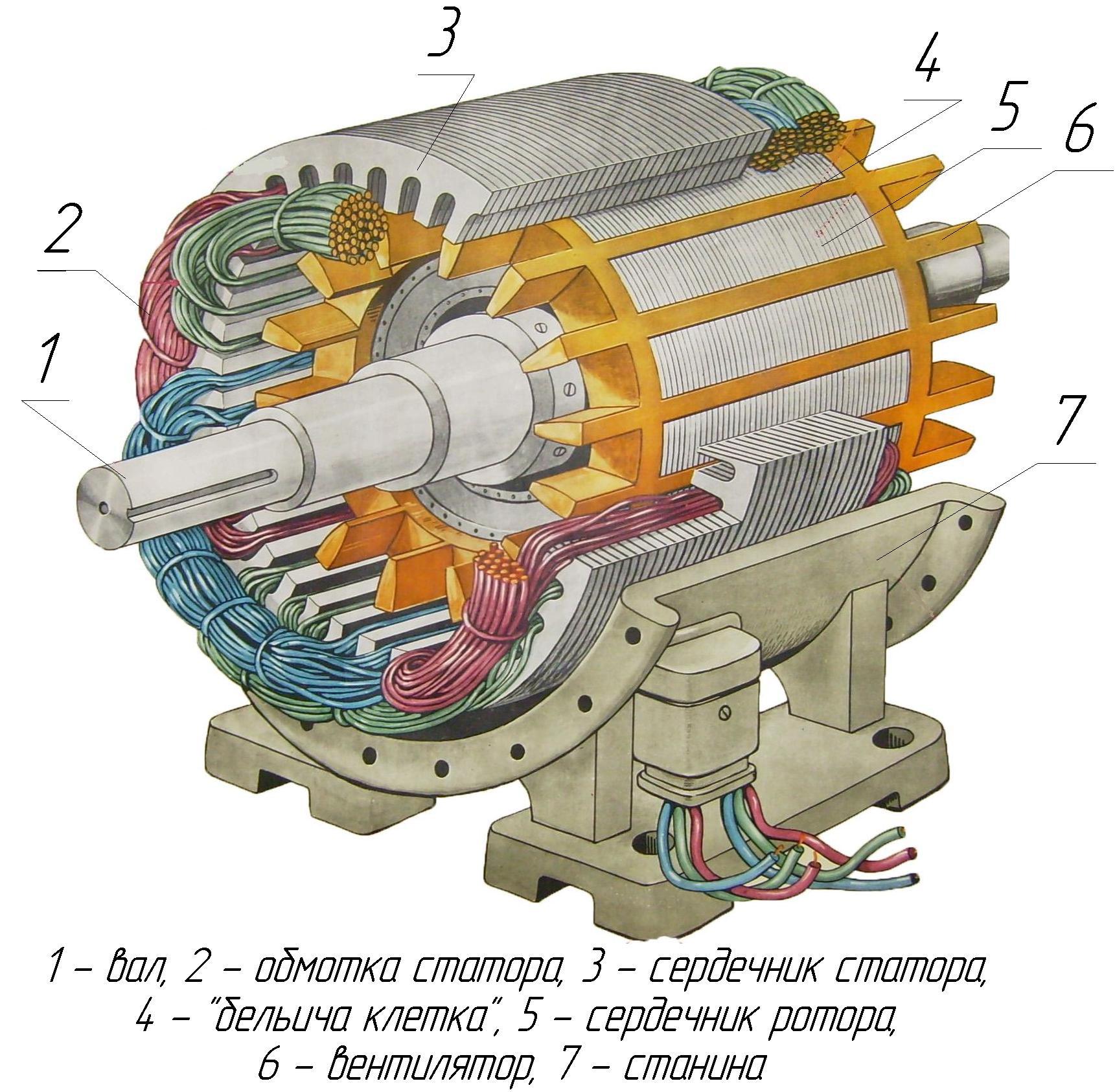 Сегодня, трёхфазный асинхронный двигатель Добровольского, самая распространённая электрическая машина.
Сегодня, трёхфазный асинхронный двигатель Добровольского, самая распространённая электрическая машина.
Устройство асинхронного двигателя
Назначение асинхронного двигателя, это преобразование энергии электричества в механическую работу. Выполнить эту задачу установке помогают две детали: статор и ротор.
Устройство статора представлено в виде неподвижной части мотора, которая взаимодействует с подвижной частью, ротором. Между ротором и статором воздушный зазор, разделяющий механизмы. Активной частью механизмов является обмотка и детали сердечника, проводящие магнитный поток, возбуждаемый электрическим током, проходящим по обмотке. С целью минимизировать магнитные потери, при перемагничивании сердечника, деталь набирают из пластин, изготовленных из электротехнической стали. Обмотка статора конструктивно равномерно укладывается проводниками в пазы сердечника, угловое расстояние 120°. Схема соединения фаз обмотки статора «треугольник» или «звезда». В целом, статор представляет собой большой электрический магнит, цель которого, создать магнитное поле.
Статор и ротор асинхронного двигателя:
Схема подключения «звезда» или «треугольник» выбирается в зависимости от напряжения питания сети. Существенную роль играют такие понятия:
Фазное напряжение, соответствует разности потенциалов между началом и концом одной фазы, или разница потенциалов между линейным и нейтральным проводом.
Линейное напряжение, разность потенциалов между двумя линейными проводами (фазами)
| Значение символов | Схема «звезда» | Схема «треугольник» |
| Uл, Uф – напряжения (линейные и фазовые), В; Iл, Iф – ток (линейный и фазовый), А; S – мощность, Вт; P – мощность активная, Вт. | ; ; ; . | ; ; ; . |
Важно! Мощность для соединения «звезда» и «треугольник» рассчитывается по одной формуле. Однако, подключение одного и того же асинхронного двигателя разными соединениями в одну и ту же сеть, приведёт к разной потребляемой мощности.
Неправильное подключение способно расплавить обмотки статора.
 Неправильное подключение способно расплавить обмотки статора.
Неправильное подключение способно расплавить обмотки статора.Схемы подключений:
Поскольку асинхронный двигатель широко распространён повсеместно, на его долю приходится потребление от 45% до 50% вырабатываемой электроэнергии. Что бы снизить расход электроэнергии (почти на 50%) и не потерять в мощности и цене двигателя, в конструкции механизма используют применение совмещённых обмоток. Принцип заключается в схеме подключения нагрузки к сети. Совмещение обмоток «звезда» «треугольник» при последующем подключении к трёхфазной сети даёт в итоге систему из шести фаз, угол между магнитными потоками в которой равен 30°. Метод сглаживает кривую магнитного поля между ротором и статором, это положительно сказывается на показателях электродвигателя.
В зависимости от конструкции ротора, асинхронный двигатель условно делят на виды: короткозамкнутый ротор, фазный ротор. Статор обоих механизмов одинаков, отличительная черта, обмотка. Сердечник ротора так же выполнен из электротехнической стали, методом комбинирования прямых и косых стыков пластин.
Составные детали двигателя размещаются в корпусе. Для небольших моторов корпус делают цельнолитым, материал изделия, чугун. Кроме того, применяют сплав алюминия, либо сталь. Некоторые корпуса в маленьких двигателях совмещают функцию сердечника, в мощных двигателях корпус выполняется из составных частей.
Поскольку асинхронный мотор относится к электрической машине, изделие применяется как в режиме двигателя, так и в режиме генератора. Однако, как генератор, асинхронный механизм имеет ряд недостатков, которые не позволили машине использоваться массово в этом качестве.
Тип подвижной части
Как уже упоминалось, в зависимости от того, в каком виде выполнена подвижная часть, асинхронные двигатели делят:
- Асинхронный двигатель с короткозамкнутым ротором.
Такая конструкция носит название «беличья клетка» за внешнюю схожесть. Конструктивно механизм состоит из стержней, которые замкнуты по торцам кольцами. Материал детали, медь или алюминий. В двигателях малой и средней мощности конструкцию выполняют, заливая расплавленный алюминий в пазы сердечника ротора, заодно выполняются кольца и торцевые лопасти. Назначение лопастей, вентилировать мотор. В мощных двигателях стержни клетки делают из меди, торцы стержней приваривают к кольцам.
Назначение лопастей, вентилировать мотор. В мощных двигателях стержни клетки делают из меди, торцы стержней приваривают к кольцам.
Наличие зубцов с низким магнитным сопротивлением, в сравнении с сопротивлением обмотки, вызывает пульсацию магнитного потока. Пульсация приводит к росту гармонических токов напряжения электродвижущей силы. Чтобы снизить это явление, а так же уменьшить шум, пазы ротора или статора делают скошенными.
Недостаток короткозамкнутого ротора в том, что пусковой момент двигателя этой конструкции небольшой, наряду со значительным показателем пускового тока. Применение этих моторов целесообразно в случаях, если не требуются большие пусковые моменты. Достоинство: простота изготовления, низкая инерция, нет контакта со статической частью, как следствие, долговечность и приемлемая стоимость обслуживания.
Короткозамкнутый ротор асинхронного двигателя:
- Асинхронный двигатель с фазным ротором.
Чаще конструкция имеет трёхфазную обмотку, иногда многофазную. Как правило, обмотка соединена по схеме «звезда» с выводом на кольца контакта, вращающиеся с валом двигателя. По кольцам контакта скользят щётки, выполненные из металла и графита. С помощью этих щёток, в цепь обмотки ротора встраивают реостат, отвечающий за регулировку пуска. Регулировка возможна, поскольку реостат играет роль добавочного активного сопротивления для каждой фазы.
Как правило, обмотка соединена по схеме «звезда» с выводом на кольца контакта, вращающиеся с валом двигателя. По кольцам контакта скользят щётки, выполненные из металла и графита. С помощью этих щёток, в цепь обмотки ротора встраивают реостат, отвечающий за регулировку пуска. Регулировка возможна, поскольку реостат играет роль добавочного активного сопротивления для каждой фазы.
Фазный ротор асинхронного двигателя:
Фазный ротор двигателя при включении максимально увеличивает момент пуска и уменьшает ток, это возможно из-за применения реостата. Такие характеристики приводят в действие механизмы, для которых характерна большая нагрузка в момент пуска.
Принцип работы
Рассмотрим асинхронный двигатель принцип работы и устройство. Для корректного подключения агрегата к сети, обмотки соединяются по схеме «звезда» или «треугольник». Действие механизма основано на использовании вращающегося магнитного поля статора. Частота вращения многофазной обмотки переменного поля (n1) определяется по формуле:
Здесь:
- f – частота сети в Герцах;
- p – Количество пар полюсов (как правило, 1-4 пары, поскольку чем их больше, тем ниже мощность и КПД, использование полюсов даёт возможность не применять редуктор, при низкой частоте вращения).

Магнитное поле, пронизывающее статор с обмоткой пронизывает и обмотку ротора. За счёт этого индуцируется электродвижущая сила. Электродвижущая сила самоиндукции в обмотке статора (Е1) направлена навстречу приложенному напряжению сети, ограничивая величину тока в статоре. Поскольку обмотка ротора замкнута, или идёт через сопротивление (короткозамкнутый ротор в первом случае, фазный ротор во втором случае), то под действием электродвижущей силы ротора (Е2) в ней образуется ток. Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.
Согласно правилу: левая рука устанавливается таким образом, что бы магнитно силовые линии входили в ладонь, а вытянутые четыре пальца направлялись вдоль движения тока в обмотке. Тогда отведённый большой палец покажет направление действия электромагнитной силы для конкретного проводника с током.
Совокупность электромагнитных сил двигателя будет равна общему электромагнитному моменту (М), который приводит в действие вал электродвигателя с частотой (n2). Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля. Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2< n1). Для определения величины отставания введён термин «скольжение», показатель определяется по формуле:
Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля. Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2< n1). Для определения величины отставания введён термин «скольжение», показатель определяется по формуле:
Таким образом, частота вращения ротора (обороты) будет равна:
Принцип работы асинхронного электрического двигателя легко объясняется с помощью устройства, называющегося диск Арго – Ленца.
Постоянный магнит закрепляют на оси, которая устанавливается в устройстве, способном обеспечить её вращение. Перед полюсами магнита (N-S) помещают диск, выполненный из меди. Диск так же крепится на оси и свободно вращается вокруг неё.
Если вращать магнит за рукоятку, диск тоже будет вращаться в том же направлении. Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Примечательно, что скорость вращения диска всегда меньше скорости вращения магнита. В асинхронных электродвигателях магнит заменяет вращающееся магнитное поле, созданное токами трёхфазной обмотки статора.
Подключение двигателя
До того, как подключить асинхронный двигатель, ознакомьтесь с его паспортом. Обмотки статора двигателя соединены «звездой» или «треугольником», в зависимости от напряжения сети. Если в паспорте указано, что механизм рассчитан на применение 220/380В, это означает, что при подключении мотора на 220В обмотки соединяют схемой «треугольник», если напряжение сети 380В, обмотки соединяют схемой «звезда».
Маркировка на коробке для клемм:
Сбор схем проводится в коробке для клемм, расположенной на корпусе электродвигателя, перед выполнением работ, коробку разбирают. Начало каждой обмотки именуется U1, V1, W1 соответственно. Концы обмоток подписываются так же U2, V2, W2. При отсутствии в коробке для клемм маркировки выводов, начало и конец обмотки определяют, используя мультиметр.
Процедура выполняется следующим образом:
- Подписываем бирки, которыми будем маркировать выводы обмоток;
- Определяем принадлежность шести выводов к трём обмоткам. Для этого берём мультиметр, переключаем в положение «200 Ом». Один щуп подключаем к любому из шести проводов, второй щуп используем, что бы прозвонить оставшиеся пять выводов. При нахождении искомого провода показания прибора будут отличными от «0».
- Эти два провода — первая обмотка двигателя. Надеть на провода бирки (U1, U2) в произвольном порядке.
- Проделываем аналогичную процедуру со второй и третьей обмоткой. Выводы второй обмотки маркируем (V1, V2), выводы третьей обмотки маркируем (W1, W2).
- Определяем вид подключения обмоток (согласованный или встречный).
 Выводы второй обмотки маркируем (V1, V2), выводы третьей обмотки маркируем (W1, W2).
Выводы второй обмотки маркируем (V1, V2), выводы третьей обмотки маркируем (W1, W2).Важно! Согласованное подключение создаёт электродвижущую силу, которая будет равна сумме сил обмоток. Встречное подключение даст электродвижущей силе нулевое значение, поскольку силы будут направлены друг навстречу другу.
- Катушку (U1, U2) соединяем с катушкой (V1, V2), после чего на выводы (U1, V2) подаём переменное напряжение 220 вольт.
- На выводах (W1, W2) меряем переменное напряжение. Если значение напряжения равно нулю, то обмотки подключены встречно, если прибор показывает некоторое значение, обмотки (U1, U2) и (V1, V2) подключены согласованно.
- Аналогичным образом определяем правильность подключения третьей обмотки.
- В зависимости от типа двигателя подключаем промаркированные концы проводов схемой «звезда» или «треугольник».
- Подаём питание на двигатель, проверяем работу.
При необходимости обратного вращения асинхронного двигателя, для этого меняют местами два провода подключаемого источника трёхфазного напряжения.
Подключение двигателя на одну фазу
Для бытовых нужд использование трёхфазного мотора проблематично, поскольку отсутствует требуемое напряжение. Решение проблемы, использовать однофазный асинхронный двигатель. Такой мотор оснащен статором, однако конструктивно изделие отличается количеством и расположением обмоток, а так же схемой их запуска.
Схема подключения однофазного двигателя:
Так, однофазный асинхронный двигатель со статором из двух обмоток будет располагать их со смещением по окружности под углом 90°. Соединение катушек будет параллельным, одна — пусковая, вторая — рабочая. Что бы создать вращающееся магнитное поле, дополнительно вводят активное сопротивление, или конденсатор. Сопротивление создаёт сдвиг фаз токов обмотки, близкий к 90°, что помогает создать вращающее магнитное поле.
При использовании статором асинхронного двигателя одной катушки, подключение источника питания в одну фазу создаст пульсирующее магнитное поле. В обмотке ротора появится переменный ток, который создаст магнитный поток, как следствие работа двигателя не произойдёт. Для запуска такого агрегата создают дополнительный толчок, подключив конденсаторную схему пуска.
В обмотке ротора появится переменный ток, который создаст магнитный поток, как следствие работа двигателя не произойдёт. Для запуска такого агрегата создают дополнительный толчок, подключив конденсаторную схему пуска.
Асинхронный двигатель, рассчитанный на подключение к трёхфазному источнику питания, работает и от одной фазы. Пользователей интересует вопрос, как подключить асинхронный двигатель на 220В. Помните, что подключение снизит коэффициент полезного действия двигателя, а так же повлияет на мощность и показатели пуска. Для выполнения задачи надо из трёх обмоток статора собрать схему, сделав так, что бы обмоток было две. Одна обмотка будет рабочей, вторая используется для запуска агрегата. Как пример, предположим, что есть три катушки с начальными выходами (U1, V1, W1) и конечными выходами (U2, V2, W2). Создаём первую рабочую обмотку, объединив концы (V2, W2), а начало (V1, W1) подключаем к сети в 220В. Пусковой обмоткой будет оставшаяся катушка, которую подключают к питанию через конденсатор, соединив её с ним последовательно.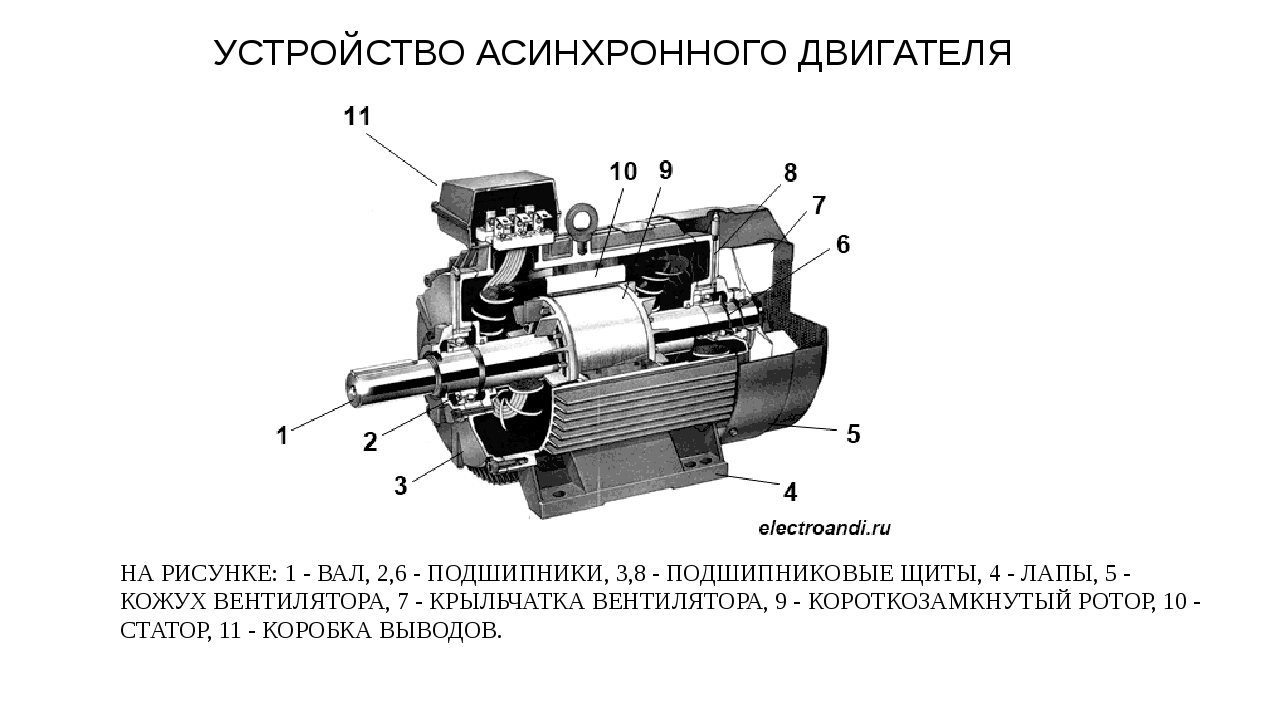
Асинхронный двигатель с двумя скоростями
Иногда необходимо изменить скорость асинхронного двигателя. Механизмы с управлением от электронного блока дорогие, поэтому применяют двухскоростной асинхронный двигатель. Принцип такого механизма в том, что обмотку в этом моторе подключают особым образом, по схеме Даландера, что меняет скорость вращения.
Схема подключения Даландера:
Подключая выводы U1, V1, W1 к напряжению в три фазы, двигатель вписывается в схему «треугольник» и работает на пониженной скорости. Если выводы (U1, V1, W1) замкнуть, а питание кинуть на (U2, V2, W2), то получится двухскоростной электродвигатель, работающий по схеме «двойная звезда», увеличивающей скорость в два раза.
Устройство, принцип действия асинхронного двигателя — Студопедия
Асинхронный двигатель – это машина переменного тока. Слово «асинхронный» означает неодновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
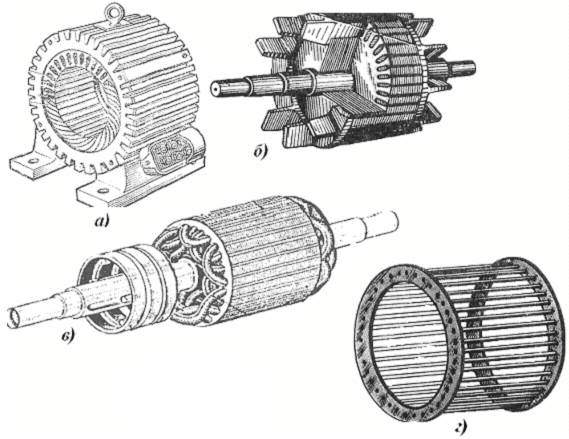
Рис.1. Устройство асинхронных двигателей
Статор – неподвижная часть машины (рис. 1, а). Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали (рис. 1, б, в). В пазах ротора укладывают обмотку, в зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г), соединенные с торцов кольцами из этого же материала («беличья клетка»).
1, г), соединенные с торцов кольцами из этого же материала («беличья клетка»).
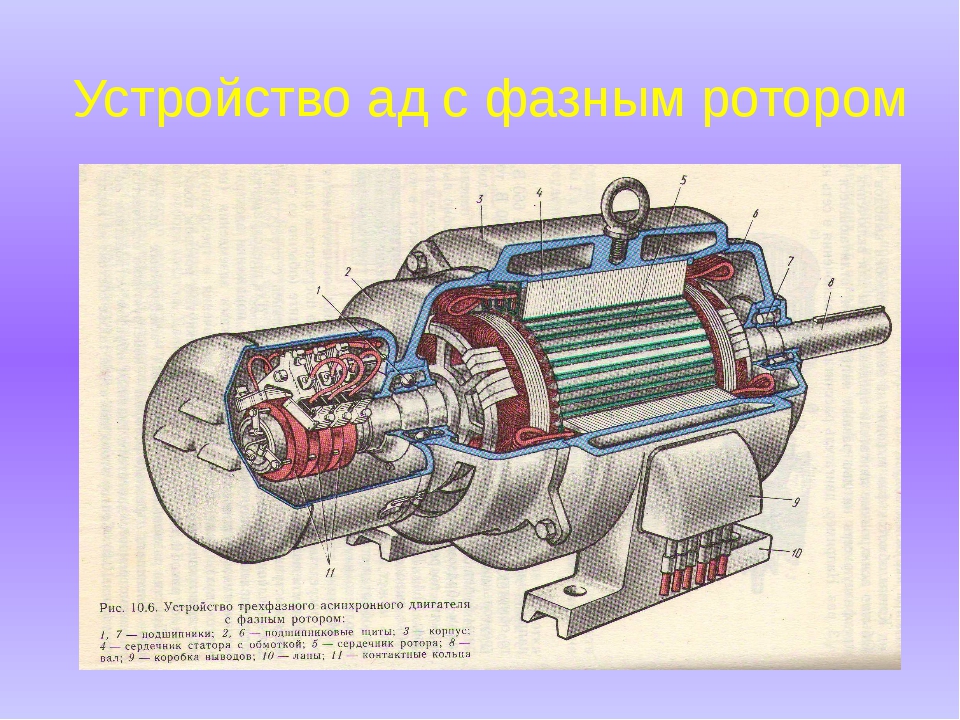
У фазного ротора (см. рис. 1, в) в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Вращающееся магнитное поле это постоянный поток, вращающийся в пространстве с постоянной угловой скоростью.
Необходимыми условиями возбуждения вращающегося магнитного поля являются:
— пространственный сдвиг осей катушек статора,
— временной сдвиг токов в катушках статора.
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120º. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой n1, об/мин, которая называется синхронной частотой вращения двигателя:
, (1)
где f1– частота тока сети, Гц;
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети Гц частота вращения поля по формуле (1) и в зависимости от числа пар полюсов имеет следующие значения:
| р | ||||||
| n1, об/мин |
Вращаясь, поле пересекает проводники обмотки ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
, (2)
где n2 – частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)
Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Получение вращающегося магнитного поля
Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Принцип работы трехфазного асинхронного двигателя
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателей
В асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Изменение частоты вращения ротора трехфазного асинхронного двигателя
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Способы торможения двигателей
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Строение ротора асинхронного двигателя — Морской флот
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.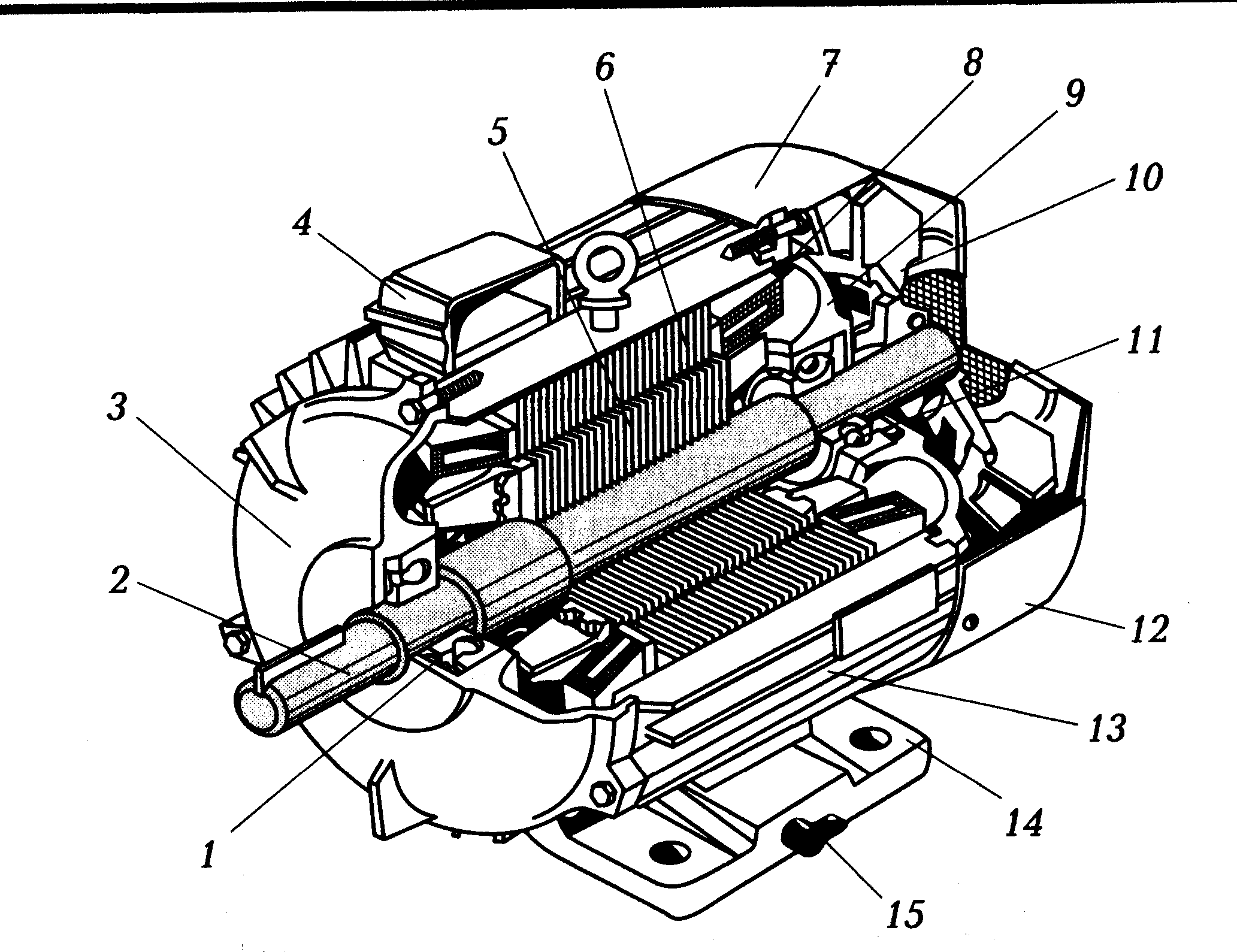
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Понимание скалярного (V / f) управления для асинхронных двигателей
В этой статье мы попытаемся понять, как реализуется алгоритм скалярного управления для управления скоростью асинхронного двигателя с относительно простыми вычислениями, и при этом достичь достаточно хорошего линейно регулируемого управления скоростью мотор.
Отчеты многих ведущих анализов рынка показывают, что асинхронные двигатели являются самыми популярными, когда речь идет о приложениях и работах, связанных с тяжелыми промышленными двигателями.Основные причины популярности асинхронных двигателей в основном связаны с их высокой степенью надежности, большей надежностью с точки зрения износа и сравнительно высокой функциональной эффективностью.
Тем не менее, асинхронные двигатели имеют один типичный недостаток, поскольку ими нелегко управлять обычными традиционными методами. Управление асинхронными двигателями является относительно сложным из-за его довольно сложной математической конфигурации, которая в первую очередь включает:
- Нелинейный отклик при насыщении сердечника
- Нестабильность формы колебаний из-за изменения температуры обмотки.
Из-за этих критических аспектов реализация управления асинхронным двигателем оптимально требует тщательно рассчитанного алгоритма с высокой надежностью, например, с использованием метода «векторного управления» и, кроме того, с использованием системы обработки на основе микроконтроллера.
Общие сведения о реализации скалярного управления
Однако существует еще один метод, который можно применить для реализации управления асинхронным двигателем с использованием гораздо более простой конфигурации, это скалярное управление, включающее методы без векторного управления.
Фактически можно включить асинхронный двигатель переменного тока в установившееся состояние, управляя им с помощью простой системы обратной связи по напряжению и управления током.
В этом скалярном методе скалярная переменная может быть изменена после достижения ее правильного значения либо путем практических экспериментов, либо с помощью подходящих формул и расчетов.
Далее, это измерение может быть использовано для реализации управления двигателем через схему разомкнутого контура или через топологию замкнутого контура обратной связи.
Несмотря на то, что скалярный метод управления обещает достаточно хорошие установившиеся результаты для двигателя, его переходная характеристика может быть не на должном уровне.
Как работают асинхронные двигатели
Слово «индукция» в асинхронных двигателях относится к уникальному способу их работы, при котором намагничивание ротора обмоткой статора становится решающим аспектом работы.
Когда переменный ток подается на обмотку статора, колеблющееся магнитное поле от обмотки статора взаимодействует с якорем ротора, создавая новое магнитное поле на роторе, которое, в свою очередь, реагирует с магнитным полем статора, вызывая большой крутящий момент на роторе.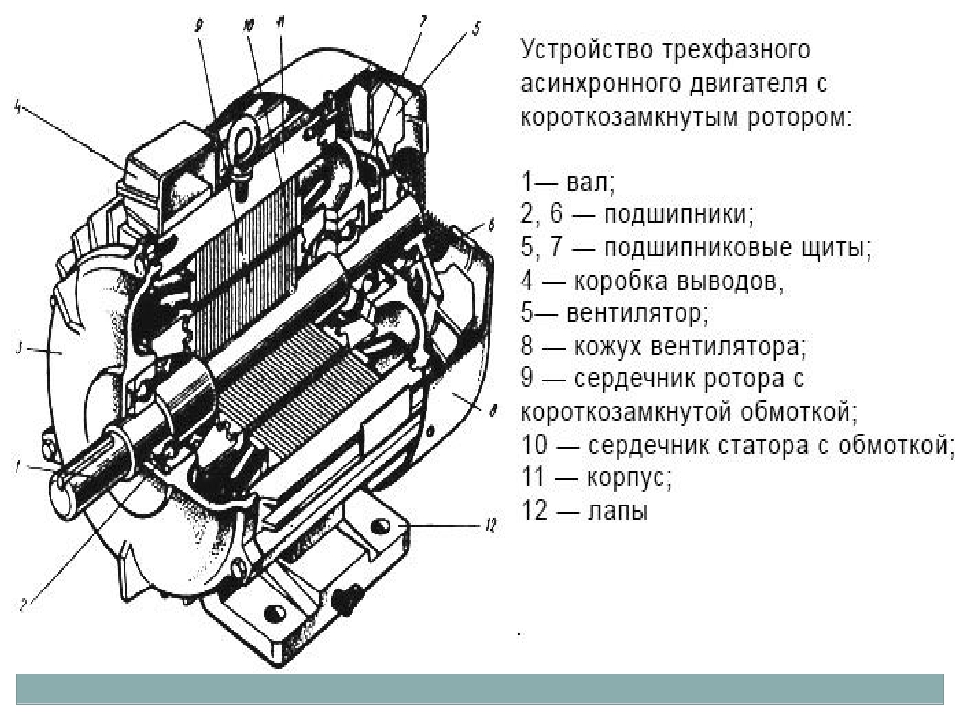 ротор.Этот крутящий момент обеспечивает необходимую эффективную механическую мощность для машины.
ротор.Этот крутящий момент обеспечивает необходимую эффективную механическую мощность для машины.
Что такое 3-фазный асинхронный двигатель с короткозамкнутым ротором
Это самый популярный вариант асинхронных двигателей, широко используемый в промышленности. В асинхронном двигателе с короткозамкнутым ротором ротор несет серию проводников в виде стержней, окружающих ось ротора, представляя уникальную структуру, подобную клетке, отсюда и название «беличья клетка».
Эти стержни, имеющие перекос по форме и вращающиеся вокруг оси ротора, прикреплены толстыми и прочными металлическими кольцами на концах стержней.Эти металлические кольца не только помогают надежно закрепить шины на месте, но и обеспечивают необходимое электрическое короткое замыкание между шинами.
Когда на обмотку статора подается последовательный трехфазный синусоидальный переменный ток, результирующее магнитное поле также начинает двигаться с той же скоростью, что и трехфазная синусоидальная частота статора (ωs).
Поскольку узел ротора с короткозамкнутым ротором удерживается внутри обмотки статора, указанное выше переменное трехфазное магнитное поле от обмотки статора вступает в реакцию с узлом ротора, создавая эквивалентное магнитное поле на стержневых проводниках узла клетки.
Это заставляет вторичное магнитное поле накапливаться вокруг стержней ротора, и, следовательно, это новое магнитное поле вынуждено взаимодействовать с полем статора, создавая вращающий момент на роторе, который пытается следовать направлению магнитного поля статора.
В процессе скорость ротора пытается достичь частотной скорости статора, и по мере приближения к скорости синхронного магнитного поля статора относительная разность скоростей e между частотной скоростью статора и скоростью вращения ротора начинает уменьшаться, что вызывает уменьшение магнитное взаимодействие магнитного поля ротора с магнитным полем статора, в конечном итоге уменьшающее крутящий момент на роторе и эквивалентную выходную мощность ротора.
Это приводит к минимальной мощности на роторе, и при этой скорости говорят, что ротор достиг установившегося состояния, когда нагрузка на ротор эквивалентна и соответствует крутящему моменту на роторе.
Работа асинхронного двигателя в ответ на нагрузку может быть резюмирована следующим образом:
Поскольку становится обязательным поддерживать точную разницу между скоростью ротора (вала) и скоростью внутренней частоты статора, скорость ротора, которая фактически справляется с нагрузкой, вращается с немного меньшей скоростью, чем частота вращения статора.И наоборот, если мы предположим, что статор подключен к трехфазному питанию 50 Гц, то угловая скорость этой частоты 50 Гц на обмотке статора всегда будет немного выше, чем отклик скорости вращения ротора, это по своей сути поддерживается для обеспечения оптимального мощность на роторе.
Что такое проскальзывание в асинхронном двигателе
Относительная разница между угловой скоростью статора частоты и реактивной скоростью вращения ротора называется «скольжением». Проскальзывание должно присутствовать даже в ситуациях, когда двигатель работает со стратегией, ориентированной на поле.
Проскальзывание должно присутствовать даже в ситуациях, когда двигатель работает со стратегией, ориентированной на поле.
Поскольку вал ротора в асинхронных двигателях не зависит от какого-либо внешнего возбуждения для своего вращения, он может работать без обычных контактных колец или щеток, обеспечивая практически нулевой износ, высокую эффективность и недорогое обслуживание.
Коэффициент крутящего момента в этих двигателях определяется углом, установленным между магнитными потоками статора и ротора.
Глядя на диаграмму ниже, мы видим, что скорость ротора задается как Ω, а частоты на статоре и роторе определяются параметром «s» или скольжением, представленным формулой:
s = ( ω s — ω r ) / ω s
В приведенном выше выражении s — это «скольжение», которое показывает разницу между скоростью синхронной частоты статора и фактическая скорость двигателя, развиваемая на валу ротора.
Понимание теории скалярного управления скоростью
В концепциях управления асинхронным двигателем, где используется метод В / Гц, регулирование скорости осуществляется путем регулирования напряжения статора относительно частоты, так что поток в воздушном зазоре никогда не может отклоняться за пределы ожидаемый диапазон установившегося состояния, другими словами, он поддерживается в пределах этого оцененного установившегося значения, и, следовательно, его также называют методом скалярного управления , поскольку метод сильно зависит от установившейся динамики для управления скоростью двигателя .
Мы можем понять, как работает эта концепция, обратившись к следующему рисунку, на котором показана упрощенная схема метода скалярного управления. В установке предполагается, что сопротивление статора (Rs) равно нулю, в то время как индуктивность рассеяния статора (LIs) воздействует на утечку ротора и индуктивность намагничивания (LIr). Можно увидеть, что (LIr), который фактически отображает величину потока в воздушном зазоре, был сдвинут до полной индуктивности рассеяния (Ll = Lls + Llr).
Из-за этого поток в воздушном зазоре, создаваемый током намагничивания, получает приблизительное значение, близкое к соотношению частот статора.Таким образом, выражение вектора для оценки установившегося состояния может быть записано следующим образом:
Для асинхронных двигателей, которые могут работать в своих линейных магнитных областях, Lm не изменится и останется постоянным, в таких случаях приведенное выше уравнение может быть выражено как :
Где V и Λ — значения напряжения статора и магнитного потока статора соответственно, тогда как Ṽ представляет параметр вектора в проекте.
Последнее выражение выше ясно объясняет, что до тех пор, пока отношение V / f остается постоянным, независимо от любого изменения входной частоты (f), поток также остается постоянным, что позволяет току работать независимо от источника питания. частота напряжения.Это означает, что если ΛM поддерживается на постоянном уровне, соотношение Vs / также будет отображаться с постоянной соответствующей скоростью. Следовательно, всякий раз, когда скорость двигателя увеличивается, напряжение на обмотке статора также необходимо пропорционально увеличивать, чтобы можно было поддерживать постоянное значение Vs / f.
Следовательно, всякий раз, когда скорость двигателя увеличивается, напряжение на обмотке статора также необходимо пропорционально увеличивать, чтобы можно было поддерживать постоянное значение Vs / f.
Однако здесь скольжение является функцией нагрузки, приложенной к двигателю, скорость синхронной частоты не отображает реальную скорость двигателя.
В отсутствие крутящего момента нагрузки на ротор результирующее скольжение может быть пренебрежимо малым, что позволяет двигателю приблизиться к
PPT — ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ PowerPoint презентация | бесплатно скачать
Название: ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ
1
ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ
2
Обзор
- Двигатели постоянного тока (щеточные и бесщеточные)
- Краткое введение в асинхронные двигатели
- Линейные двигатели
- Линейные двигатели 10
- 2
Ю.Lalitha
3
Основные принципы электродвигателя- Взаимодействие между магнитным полем и током
несущий провод создает силу - Напротив генератора
3
Y. - Взаимодействие между магнитным полем и током
- Постоянные магниты для внешнего статора
- Вращающиеся катушки для внутреннего ротора
- Коммутация выполняется с помощью металлических контактных щеток
и контактов, предназначенных для изменения полярности
ротора при достижении горизонтали

4
Y.Lalitha
5
2-полюсный щеточный двигатель постоянного тока, коммутация
5
Y.Lalitha
6
Обычные (щеточные) двигатели постоянного тока
- Общие области применения
- Маленькие / дешевые устройства, такие как игрушки, электрические зубья
щетки, маленькие сверла - Lab 3
- Плюсы
- Дешево, просто
- Легко контролировать — скорость регулируется напряжением
, а крутящий момент — током через якорь - Минусы
- Механические щетки — электрические помехи, искрение, искрение
, трение, износ, неэффективное, короткое замыкание
6
Y. Lalitha
Lalitha
7
Рекомендации по двигателям постоянного тока
- Обратная ЭДС — каждый двигатель также является генератором
- Больше тока больше крутящего момента больше напряжения больше
скорость - Нагрузка, крутящий момент, скоростные характеристики
- Шунтирующая, последовательная (также известная как универсальный двигатель), составные двигатели постоянного тока
7
Y.Lalitha
8
Бесщеточные двигатели постоянного тока
- Существенное отличие — коммутация выполняется
электронно с помощью контроллера, а не
механически с помощью щеток
8
Y.Lalitha
9
Коммутация бесщеточного двигателя постоянного тока
- Коммутация выполняется в электронном виде с помощью контроллера
(например, HCS12 или логической схемы) - Подобие шагового двигателя, но с меньшим числом полюсов
- Требуется позиционная обратная связь ротора с обратной связью Холла
датчики, обратная ЭДС, фототранзисторы
9
Y. Lalitha
Lalitha
10
BLDC (3-полюсный) Подключение двигателя
- Имеет 3 провода вместо 2, как щеточный DC
- Дельта (большая скорость) и звезда (больше крутящий момент)
обмотки статора
треугольник звезда
10
Y.Lalitha
11
Бесщеточные двигатели постоянного тока
- Применения
- Вентиляторы охлаждения процессора
- CD / DVD-плееры
- Электромобили
- Плюсы (по сравнению с матовыми двигателями постоянного тока)
- Более высокая эффективность
- Более длительный срок службы, низкие эксплуатационные расходы
- Чистый , быстро, без искрения / проблемы с матовыми контактами
- Минусы
- Более высокая стоимость
- Более сложная схема и требует контроллера
11
Y.Lalitha
12
Двигатели переменного тока
- Два основных типа двигателей переменного тока: синхронный и индукционный
. - Синхронные двигатели подают питание как на ротор
, так и на статор, тогда как асинхронные двигатели только
подают питание на обмотки статора и полагаются на индукцию
для создания крутящего момента.
12
Y.Lalitha
13
Асинхронные двигатели переменного тока (3 фазы)
- Используйте многофазный (обычно 3) переменный ток для создания вращающегося магнитного поля
на статоре - Это индуцирует магнитное поле на ротор, который
пытается следовать за статором — для
требуется проскальзывание для создания крутящего момента - Рабочие лошадки в отрасли — высокая мощность
приложения
13
Y.Lalitha
14
Асинхронные двигатели переменного тока
- Асинхронные двигатели подают ток только на статор
и зависят от второго наведенного тока в обмотках ротора
. - Для этого требуется относительная скорость вращения магнитного поля
и ротора. Если ротор
каким-то образом соответствует или превышает скорость магнитного поля
, возникает состояние, называемое скольжением. - Скольжение требуется для создания крутящего момента, если
нет скольжения, нет разницы между индуцированным полюсом
и ведомым полюсом, и, следовательно,
нет крутящего момента на валу.
 Если ротор
Если ротор 14
Y.Lalitha
15
Синхронные двигатели переменного тока
- Ток подается как на ротор, так и на статор
. - Это обеспечивает точное управление (шаговые двигатели),
, но требует наличия механических щеток или контактных колец для
подачи постоянного тока на ротор. - Проскальзывания нет, поскольку ротор не полагается на индукцию
для создания крутящего момента.
15
Y.Lalitha
16
Линейные двигатели
Линейные двигатели — это электрические асинхронные двигатели, которые
производят движение по прямой, а не вращательное движение
. В традиционном электрическом двигателе
В традиционном электрическом двигателе
ротор (вращающаяся часть) вращает внутри
статора (статическая часть) линейного двигателя, статор
развернут и разложен горизонтально, а «ротор»
движется мимо него по прямой линии. В линейных двигателях
часто используются сверхпроводящие магниты, которые
охлаждаются до низких температур для снижения потребления энергии
17
Основной принцип линейного двигателя
был открыт в 1895 году, но практические устройства
не были разработаны до 1947 года.В 1950-х годах британский инженер-электрик
Эрик
Лейтуэйт начал рассматривать возможность использования линейных двигателей
в электрических ткацких станках
. Исследования Лейтвейта в Имперском колледже
в Лондоне получили международное признание
в 1960-х годах после выступления в Королевском институте
под названием «Электрические машины
будущего».
18
- В 1960-е годы исследования Эрика Лэйтуэйта линейных двигателей
возродили интерес к идее
поезда на магнитной подвеске, или поезда на магнитной подвеске. - Примерно в это же время ученый из Массачусетского технологического института Генри Колм
предложил летящий по рельсам «магнаплан», на котором
мог перевозить 20 000 человек со скоростью 200 миль в час (320 км / ч). - Это послужило толчком для исследовательской программы в США и привело к созданию рабочего прототипа
, который был испытан в Колорадо в
1967 году. - Однако программа США столкнулась с
политическими трудностями и была отложена в 1975 году. - Начало 1990-х принесло амбициозные Предложение
связать Лас-Вегас, Лос-Анджелес, Сан-Диего и Сан-
Франциско с железной дорогой на магнитной подвеске, но этот проект
с тех пор столкнулся с более политическими проблемами
.

19
- Напротив, maglev
с энтузиазмом разрабатывалась - в Германии и Японии.
- Немецкие инженеры впервые изготовили рабочий прототип
в 1971 году, а годом позже разработали систему Transrapid
. - При значительной поддержке правительства Германии
, этот
был постепенно усовершенствован в жизнеспособный поезд, который был протестирован на
скорости до 271 миль в час (433 км / ч). - Строго говоря, Transrapid использует магнитное притяжение
, а не магнитное отталкивание
, обычно связанное с магнитным полем. Медные магниты
прикреплены к «юбке», которая проходит под
снизу и притягивается вверх к стальной направляющей
.

20
Фото НАСА тестирует прототип железной дороги Маглев,
2001
21
В традиционном электродвигателе постоянного тока центральный сердечник
из плотно обернутого магнитного материала (известный как
ротор) вращается с высокой скоростью между фиксированные
полюсов магнита (известного как статор) при подаче электрического тока
. В асинхронном двигателе
переменного тока электромагниты, расположенные вокруг края
двигателя, используются для создания вращающегося магнитного поля
в центральном пространстве между ними. Это «индуцирует» (производит) электрические токи
Это «индуцирует» (производит) электрические токи
в роторе, заставляя его вращаться. В
электромобиль такие двигатели постоянного или переменного тока
используются для привода шестерен и колес и преобразования вращательного движения
в движение по прямой.
22
Основы линейных двигателей 1,4
- Аналогичен размотанному двигателю постоянного тока
- Сила (F) генерируется при взаимодействии тока (I)
(вдоль вектора L) и плотности потока (B) - F LI x B
I
23
Преимущества линейных двигателей
- Высокая максимальная скорость
- Ограничено главным образом напряжением на шине, управлением
электроника - Высокая точность
- Точность, разрешение, повторяемость ограничены обратной связью
прибор бюджетный - Люфт нулевой Без механической трансмиссии
комплектующих. - Fast Response
- Скорость отклика может быть более чем в 100 раз выше, чем у механической коробки передач
? более быстрые ускорения,
время установления (большая производительность) - Жесткость
- Нет механической связи, жесткость в основном зависит от тока усиления
- Долговечность
- Современные линейные двигатели имеют мало / не имеют соприкасающихся частей
? отсутствие износа
24
Недостатки линейных двигателей
- Стоимость
- Низкий объем производства (относительно спроса)
- Высокая цена магнитов
- Линейные энкодеры (обратная связь) намного дороже
, чем датчики вращения, увеличивается стоимость
с длиной - Приводы и элементы управления с большей пропускной способностью
- Меньшее усилие в зависимости от размера упаковки
- Проблемы с нагревом
- Forcer обычно прикреплен к нагрузке? Потери I2R
напрямую связаны с нагрузкой - Нет (минимальное) трение
- Нет автоматического тормоза
25
Компоненты линейных двигателей
- Форсун (обмотка двигателя)
- Обмотки (катушки) обеспечивают ток (I)
- Обмотки заключены в материал сердечника
- Монтажная пластина сверху
- Обычно содержит датчики (эффект Холла и
тепловой) - Магнитная рейка
- Железная пластина / опорная пластина
- Редкоземельные магниты с переменной полярностью
обеспечивают магнитный поток (B) - Одиночная или двойная направляющая
F lI x B
26
Типы линейных двигателей
- Железный сердечник
- Катушки, намотанные на зубцы пластин на форсере
- Железный сердечник
- Двойная задняя часть утюга, разделенная прокладкой
- Катушки, скрепленные эпоксидной смолой
- Без шва
- Катушка и задняя часть железа скреплены вместе w с эпоксидной смолой
27
Типы линейных двигателей Железный сердечник
- Отличительная особенность
- Медные обмотки вокруг пластин форсера над одинарной магнитной рейкой
- Преимущества
- Максимальное усилие на единицу объема
- Эффективное охлаждение
- Недостатки
- Высокая сила притяжения между вынуждающим магнитом
Гусеница - Зубчатый механизм влияет на силу тяги, поскольку он
проходит над каждым магнитом (так называемая пульсация скорости)
28
Типы линейных двигателей Без железа
Вид сверху
- Отличительные особенности Характеристика
- Форсунка, состоящая из обмоток, скрепленных вместе
эпоксидной смолой и движущихся между двумя рельсами (север
и юг) - Также известен как моторы Aircore или U-образные двигатели
- Преимущества
- Силы притяжения в форсунке отсутствуют
- Нет зацеплений
- Форсер малый вес — Отсутствие железа означает более высокую скорость разгона / торможения
- Недостатки
- Низкое усилие на размер упаковки
- Меньшая жесткость, ограниченная максимальная нагрузка без улучшенной конструкции
- Плохое рассеивание тепла
- Более высокая стоимость (2x магнита!)
29
Типы линейных двигателей Без паза
Вид сбоку
- Отличительная особенность
- Сочетание катушек без железа и с железным сердечником с задней стенкой
Железо, содержащееся в алюминиевом корпусе, по сравнению с рельсом с одним магнитом - Преимущества перед без железа
- Более низкая стоимость (1x магниты )
- Лучшее рассеивание тепла
- Конструктивно более прочный форсун
- Больше силы для каждого размера упаковки
- Преимущества перед железным сердечником
- Меньший вес и меньшая инерция форсера
- Меньшие силы притяжения
- Меньше зазубрин
Вид спереди
30
Слоты для линейных двигателей s
Вид сбоку
- Недостатки
- Некоторая привлекательная сила и зубцы
- Менее эффективен, чем железный сердечник и без железа — больше
тепла для выполнения той же работы
Вид спереди
31
Линейный двигатель Сравнение типов 2
Линейный бесщеточный Тип двигателя постоянного тока Линейный бесщеточный Тип двигателя постоянного тока Линейный бесщеточный двигатель постоянного тока Тип
Характеристика Железный сердечник Бесконтактный
Сила притяжения Максимально Нет Умеренная
Стоимость Средняя Высокая Наименьшая
Усилие зазубрины Наивысшая Нет Средняя
Плотность мощности Наивысшая Средняя Средняя
Вес форсунки Наибольшая Легкая Средняя
32
Компоненты полной системы линейного двигателя 3
- Компоненты двигателя
- Основание / подшипники
- Сервоконтроллер / элементы обратной связи
- Типичные датчики включают эффект Холла (для положения
) и термодатчики - Организация кабелей
33
Приложения
- 9 0009 Малые линейные двигатели
- Упаковка и транспортировка материалов
- Автоматизированная сборка
- Поршневые компрессоры и генераторы
- Большие линейные индукционные машины (3 фазы)
- Транспортировка
- Обработка материалов
- Экструзионные прессы
34
( Расшифровка)
35
Линейный асинхронный двигатель
- Линейный асинхронный двигатель, сокращенно LIM.
- В основном двигатель специального назначения, который используется
для достижения прямолинейного движения, а не вращательного движения
, как в случае обычных двигателей
. - Это настоящее инженерное чудо — преобразовать обычный двигатель
для специального назначения с более или менее похожим принципом работы
, тем самым увеличив универсальность работы
.

36
Линейные асинхронные двигатели, изобретенные Чарльзом
Уитстоном в 1840 м., с тех пор линейные асинхронные двигатели
исследуются, производятся и улучшаются, а в настоящее время используются в мехатронных системах
, примерами которых являются высокоскоростной транспорт
и катапульта, промышленные транспортные системы, дозирующие системы
, вертикальные транспортные системы, полупроводники
и электроника. промышленность,
Системы локализации взрыва, Промышленные роботы
и станки, Системы защиты и управления
энергетики, Медицинские приборы
, Компьютерная техника.
37
- Преимущества
- Прямая электромагнитная сила (нет
- механических элементов, нет ограничений по скорости).
- Экономичное и дешевое обслуживание.
- Простое расширение для любого линейного перемещения топологии системы
. - Точное позиционирование в замкнутых системах.
- Возможность обеспечения раздельного охлаждения обмоток индуктора и
- .
- Коэффициент мощности, развиваемый естественным охлаждением
LIM, составляет 1 Н / см2.Почти 2 Н / см2 можно получить
с воздушным охлаждением и от 2,5 — 3 Н /
см2 с жидкостями 3. - Все электромеханические системы управления, используемые
для асинхронных двигателей, могут быть адаптированы для LIM
без любые большие изменения.
- Недостатки
- Коэффициент мощности и КПД ниже, чем у роторных двигателей
из-за отношения большого воздушного зазора
между индукторами и шагом полюсов (г / т) gt1 / 250. - Продольный торцевой эффект снижает коэффициент мощности
и КПД.Это можно заметить только у высокоскоростных двигателей
с малым числом полюсов. - Влияние продольного торцевого эффекта
можно уменьшить с помощью специальных методов проектирования двигателя. - Наблюдаются лишние колебания с перекосами
из-за некомпенсированной нормальной силы.

38
(Без стенограммы)
39
- В последние годы попытки разработать новые средства высокоскоростной и эффективной транспортировки
вызвали значительный интерес во всем мире к высокоскоростным поездам
. - Это, в свою очередь, вызвало интерес к линейному асинхронному двигателю
, который считается одной из наиболее подходящих силовых установок для высокоскоростных поездов
. - Исследования и эксперименты с линейными асинхронными двигателями
активно проводятся в ряде
стран, в том числе в Японии. - К сожалению, многие исследователи, стремясь к достижению немедленных практических результатов
, сосредоточили
на экспериментах с крупномасштабным испытательным оборудованием
и крупногабаритными испытательными поездами,
оставляя теоретические аспекты линейного асинхронного двигателя
без внимания, так что Было получено несколько полезных результатов
.

40
Несмотря на обширные экспериментальные усилия,
не было зарегистрировано результатов испытаний линейного асинхронного двигателя
с доказанной пригодностью для
высокоскоростных поездов, превышающих, скажем, 200 км / ч.
Эта ситуация частично связана с тем фактом, что до
до настоящего времени не было создано надежной теоретической основы для линейного асинхронного двигателя
, поэтому многие исследователи
основывали свои идеи на теориях
и опыте с роторным асинхронным двигателем.
41
Конструкция линейного асинхронного двигателя
Конструкция LIM аналогична трехфазному асинхронному двигателю
. . Если статор асинхронного двигателя с полифазной фазой
. Если статор асинхронного двигателя с полифазной фазой
, показанного на рисунке, разрезан на
вдоль сечения aob и уложен на плоскую поверхность,
, тогда он образует первичную обмотку LIM, содержащую полевую систему
, и, следовательно, ротор образует
вторичная обмотка, состоящая из плоских алюминиевых проводов
с ферромагнитным сердечником для эффективной магнитной связи
.
42
- Существует несколько способов и типов конструкции
линейного двигателя или линейного асинхронного двигателя. - Простейшая форма конструкции линейного двигателя
такая же простая, как трехфазный асинхронный двигатель
. - Он имеет трехфазную обмотку, размещенную в пазах в полевой системе
. - Это просто первичная обмотка статора в корпусе
асинхронного двигателя. - Это получается, если отрезать статор асинхронного двигателя
от середины. - В случае движущегося объекта, например, в поезде, первичная обмотка
установлена на кузове транспортного средства
.

43
- Ротор состоит из алюминиевых или медных пластин
, соединенных параллельно. - Для завершения пути потока ферромагнитный материал
помещается вместе с пластинами. - Поскольку первичный находится на транспортном средстве или объекте, а вторичный
имеет форму пластин, они будут иметь
неравной длины. - Для большего расстояния первичная обмотка остается маленькой, а для
— очень маленькой и с ограниченным расстоянием вторичная обмотка
— маленькой. - Обычно используется двусторонняя первичная обмотка.
- В этой конфигурации используется система с двумя полями, по одному
с каждой стороны от вторичного.
44
- Существенное различие между линейным асинхронным двигателем
и роторным асинхронным двигателем — это открытый линейный воздушный зазор
, который имеет как входной конец
, так и выходной конец. - Концевой эффект, который вызван открытостью воздушного зазора
, вызывает
значительные искажения в распределении магнитного поля
и особые явления, которые не наблюдаются в роторном асинхронном двигателе
, но которые
значительно влияют на характеристики линейного асинхронного двигателя
. - Первые сообщения о концевом эффекте линейного асинхронного двигателя
были сделаны много лет назад в соединении
с арочным двигателем, асинхронном двигателе
, в котором одна часть сердечника статора была удалена
.

45
Работа линейного асинхронного двигателя
Когда первичная обмотка возбуждается сбалансированным трехфазным питанием
, в первичной обмотке индуцируется вращающийся электромагнитный поток
. Синхронная скорость поля
задается уравнением ns2 fs / p Здесь
fs — частота питания в Гц, p — число полюсов
, ns — синхронная скорость
вращения магнитного поля в
оборотов на второй.Развиваемое поле
приведет к линейному бегущему полю, скорость
которого задается уравнением
, здесь vs2 t fs · метр в секунду,
vs — скорость линейного перемещающегося поля
, t — шаг полюсов.
46
Для скольжения s скорость проводящего ведомого в линейном двигателе
определяется как vr (1-s) vs
- Линейный асинхронный двигатель
- похож по конструкции
на круговой двигатель, который был открыт
квартира. - Магнитное поле теперь перемещается по плоской поверхности двигателя
, а не вращается.

47
- Статор обычно состоит из многофазной обмотки
в многослойном железном сердечнике. - При питании от источника переменного тока создается бегущее магнитное поле с волной
. - Направление движения можно изменить, поменяв местами две фазы
. - Реакционная пластина эквивалентна ротору
. - Для односторонних приложений это обычно токопроводящий лист
из алюминия или меди, поддерживаемый сталью
, а для двусторонних приложений используется только токопроводящий лист
. - Токи, индуцируемые в реакционной пластине бегущим полем статора
, создают вторичное магнитное поле
. Это реакция между этими
двумя полями, которая производит линейную тягу.
48
- Применение линейного асинхронного двигателя или LIM
- Хотя эти двигатели используются нечасто.
- Лишь в нескольких случаях линейный двигатель
используется или используется надлежащим образом. - Кажется, что эти двигатели технически,
осуществимы, но с экономической точки зрения
эти двигатели используются нечасто.Однако возможные применения линейного асинхронного двигателяперечислены ниже. Применение для стационарной полевой системы
- Автоматические раздвижные двери в электропоезде
- Металлический ленточный конвейер
- Механическое подъемно-транспортное оборудование, такое как движущая сила
поезда - ванны вдоль определенного маршрута
- Приложение для челночного движения

49
- Приложения для системы движущегося поля
- Высокоскоростные и среднескоростные приложения были опробованы
с движением с линейным двигателем транспортных средств
с воздушной подушкой или магнитной подвеской. - Высокоскоростное применение в качестве двигателя мостового крана
, где полевая система подвешена на подъемнике
.

50
Классификация линейных асинхронных двигателей
Области применения
51
Ссылки
- 1 S. Cetinkunt, Mechatronics, John Wiley
Sons, Inc., Hoboken 2007. - 2 J. Barrett, T. Харнед, Дж. Моннич, Linear
Motor Basics, Parker Hannifin Corporation,
http // www.parkermotion.com / whitepages / linearmotor
article.pdf - 3 Позиционеры Trilogy Linear Motor Linear Motor
, Parker Hannifin Corporation, 2008,
http://www.parkermotion.com / pdfs / Trilogy_Catalog.p
df - 4 Rockwell Automation, http //www.rockwellautoma
tion.com/anorad/products/linearmotors/questions.h
tml - 5 Дж. Марш, Рекомендации по применению параметров двигателя,
Parker-Trilogy Linear Motors, 2003.
http // www.parkermotion. ru / whitepages / Linear_Mot
or_Parameter_Application_Note.pdf - 6 Грег Паула, Линейные двигатели в центре внимания,
Американское общество инженеров-механиков,
1998.
52
(без стенограммы)
53
(без стенограммы)
54
( Без стенограммы)
55
(без стенограммы)
Мониторинг состояния асинхронных двигателей
1. Введение
Асинхронные двигатели (ИД) — это рабочая лошадка во многих отраслях промышленности, таких как производство, горнодобывающая промышленность и транспорт; и, что более важно, они потребляют до 50% вырабатываемой электроэнергии в мире [1].В связи с этим на протяжении десятилетий ряд исследований и разработок был направлен на повышение производительности и эффективности IM. Например, в промышленных приложениях эффективная и надежная система мониторинга состояния очень важна при обнаружении неисправности IM на самой ранней стадии, чтобы предотвратить снижение производительности и сбой в работе ведомого оборудования. Его также можно использовать для планирования операций профилактического обслуживания без периодического выключения машин для ручных проверок.Затраты на техническое обслуживание могут быть дополнительно сокращены (особенно для больших дорогих двигателей) за счет быстрого выявления неисправного компонента (ов) без проверки всех компонентов в IM.
Как показано на Рисунке 1, типичный IM состоит из статора, ротора, вала, подшипников качения и соответствующих дополнительных компонентов. Компоненты IM могут быть повреждены во время работы по таким причинам, как удары, усталость, недостаточная смазка, старение и т. Д. Исследования показали, что неисправности подшипников составляют примерно 75% дефектов двигателей малых и средних размеров и 41% неисправностей крупных двигателей в бытовых и промышленных применениях [2].К другим дефектам IM относятся сломанные стержни ротора (до 10%), неисправности обмотки статора, дисбаланс вала и несовершенство фаз.
Рисунок 1.
Конструкция асинхронных двигателей: 1 вал, 2 подшипника, 3 ротора, 4 статора.
Традиционный метод диагностики неисправностей IM, который до сих пор широко практикуется обслуживающими бригадами в промышленности, полагается на людей-диагностов для периодических проверок, основанных на предупреждающих знаках, таких как запах, повышение температуры, чрезмерная вибрация и повышенный уровень акустического шума.Однако эти физические симптомы могут быть связаны с шумом из других источников. Альтернативой является использование методов обработки сигналов для обнаружения неисправностей. Обработка сигналов — это процесс извлечения характерных признаков из собранных сигналов. Традиционное обнаружение неисправностей машинного оборудования основано на тепловых сигналах [3], акустических сигналах и сигналах вибрации [4,5]. Локальная или объемная температура может использоваться для диагностики дефектов IM, однако накопление тепла и его развитие являются медленными, что может не подходить для обнаружения зарождающейся неисправности.Акустический шум может указывать на неисправности АД, особенно на серьезные и распределенные дефекты; однако акустический сигнал подвержен загрязнению фоновым шумом, например шумом от других машин поблизости. Сигналы вибрации могут быть собраны с помощью соответствующих датчиков вибрации, установленных рядом с опорными подшипниками IM. Хотя сигналы вибрации имеют относительно высокое отношение сигнал / шум, датчики вибрации дороги и требуют высокой точности установки.Альтернативой является использование сигнала тока статора для анализа, который не влияет на структуру IM. Кроме того, датчики электрического тока недороги и просты в установке [6]. Таким образом, предлагаемые исследования в данной работе будут сосредоточены на диагностике неисправностей АД с использованием сигналов тока статора.
В литературе было предложено несколько методов анализа сигнатур тока двигателя для обнаружения неисправностей в IM, в основном для роторов и подшипников, которые кратко описаны ниже.
1.1. Обнаружение неисправностей роторов IM
Сломанные стержни ротора — это распространенные дефекты ротора, которые приводят к асимметрии ротора IM. Неисправности стержня ротора могут быть вызваны несколькими факторами, такими как перегрев из-за частых запусков под нагрузкой, несбалансированная тепловая нагрузка из-за эксцентриситета воздушного зазора, производственные дефекты и коррозия материала ротора, вызванная химическими веществами или влагой [7].
Из-за вышеупомянутых причин стержень (и) ротора может быть полностью или частично поврежден, что вызовет асимметрию роторной клетки и приведет к асимметричному распределению токов ротора.Когда в стержне ротора образуется трещина, стержень с трещиной перегревается и имеет тенденцию ломаться. Тогда соседние стержни должны нести более высокие токи, и, следовательно, они становятся склонными к повреждению, что приводит к множественным переломам стержня. Кроме того, сломанные части неисправных стержней могут удариться о торцевую обмотку двигателя и вызвать серьезные механические повреждения ИД [8].
Спектральный анализ с быстрым преобразованием Фурье (БПФ) является широко используемым методом обнаружения поломки стержня ротора путем исследования характеристических частотных составляющих в спектре.Например, Elkasabgy et al. [9] использовали спектральный анализ сигналов тока АД для обнаружения обрыва стержня ротора. Сообщается, что сигнал тока АД становится нестационарным, если стержни ротора повреждены. Однако БПФ полезно только для анализа стационарных сигналов, в котором отсутствует возможность захвата переходных характеристик, таких как дрейфы, резкие изменения и частотные тренды в нестационарных сигналах. Чтобы решить эту проблему, частотно-временные методы, такие как кратковременное преобразование Фурье (STFT), могут использоваться для обработки небольших сегментов нестационарных сигналов для обнаружения дефектов сломанной стержня ротора.Например, Arabaci и Bilgin [10] применили STFT для обнаружения неисправностей стержня ротора IM. Однако STFT не может предоставить информацию, соответствующую разным временным и частотным разрешениям, из-за своих оконных функций фиксированной длины [11]. Чтобы решить эту проблему, можно использовать вейвлет-преобразование (WT) для исследования информации, связанной с различным разрешением по частоте. Например, Daviu et al. [12] использовали дискретный WT для обнаружения неисправности сломанных стержней ротора IM. Разложение вейвлет-пакета (WPD) использовалось для исследования всей полосы частот с высоким разрешением.Например, Садегян и др. [13] использовали WPD для извлечения функций и применили нейронные сети для диагностики поломки стержня ротора IM. Пинеда-Санчес и др. [14] использовали полиномиально-фазовое преобразование для диагностики поломки стержня ротора в условиях, изменяющихся во времени. Риера-Гуасп и др. [15] извлекли особенности неисправности сломанной стержня ротора из переходного состояния IM с помощью анализа Габора. Хотя WPD может исследовать детали сигнала для некоторого расширенного анализа сигналов, обычно трудно распознать реальные характерные особенности на карте с избыточной и вводящей в заблуждение информацией.Akin et al. [16] выполнял обнаружение неисправностей в реальном времени с использованием теории опорных кадров. Soualhi et al. [17] диагностировали поломку стержня ротора с помощью классификации выбранных признаков неисправности с использованием усовершенствованного метода кластеризации искусственных муравьев. Gunal et al. [18] провели диагностику неисправности сломанной штанги ротора IM с использованием индексов неисправности во временной области. Тем не менее, вышеупомянутые методы ориентированы только на ограниченную информацию об ошибках, поэтому их производительность может ухудшиться.
1.2. Обнаружение неисправностей подшипников IM
Подшипники качения обычно используются не только в электродвигателях, но и во вращающихся механизмах различных типов.Как показано на рисунке 2, подшипник качения представляет собой систему, состоящую из внешнего кольца (обычно неподвижного кольца), внутреннего кольца (обычно вращающегося кольца), нескольких тел качения и сепаратора.
Рисунок 2.
Конструкция подшипника качения.
Поскольку материалы подшипников подвергаются динамической нагрузке, усталостная точечная коррозия является наиболее распространенным дефектом компонентов подшипников. Дефекты подшипника могут возникать на наружном кольце, внутреннем кольце и телах качения. В нормальных условиях эксплуатации после того, как циклы нагружения превышают некоторый порог, усталостная ямка может возникать сначала на неподвижном кольцевом кольце, а затем на вращающемся кольце и телах качения.Дефекты питтинга не только ухудшают точность передачи, но также вызывают чрезмерную вибрацию и шум. Другие дефекты подшипника, такие как задиров и сильный износ [7], могут быть вызваны несколькими внешними причинами, такими как удары, перегрузка и перегрев, недостаточная смазка, загрязнение и коррозия из-за абразивных частиц или кислоты, а также неправильная установка подшипника, что приведет к вносить чрезмерные ошибки несоосности.
Когда компонент подшипника поврежден, соответствующие характеристические частоты будут связаны с геометрией подшипника, скоростью вращения и местоположением дефекта.Предположим, что внешнее кольцо подшипника зафиксировано, а внутреннее кольцо вращается вместе с валом, что является обычным случаем в большинстве приложений. Характеристическая частота дефекта внешнего кольца f od Характеристическая частота дефекта внутреннего кольца f id и характеристическая частота дефекта тела качения f rd определяются как
fod = N2 [fi (1 − dcos (θ) D)] E1fid = N2 [fi (1 + dcos (θ) D)] E2frd = D2dfi [1− (dcosθD) 2] E3
, где f i — внутренний гоночная скорость вращения или частота вращения вала в Гц; d — диаметр тела качения; D — средний диаметр; θ — угол смачивания.
При возникновении дефектов подшипника эти характеристические частоты вибрации подшипника f v (т.е. f od , f id ‘ и f rd ) будет модулироваться частотой источника питания f p в спектре сигналов тока статора из-за эксцентриситета воздушного зазора и изменения момента нагрузки. Таким образом, характерные частоты тока статора f c в терминах характеристических частот колебаний f v будут рассчитаны по [19]:
fc = | fp ± mfv |, m = 1, 2, 3,…E4
Для обнаружения неисправности подшипников IM, характеристические частотные составляющие тока статора могут использоваться в качестве индикаторов частотной области в спектральном анализе [20]. В литературе было предложено несколько методов обнаружения неисправностей подшипников IM с использованием сигналов тока статора. Например, Девани и Эрен [21] применили анализ спектра тока статора IM для обнаружения дефектов подшипников. БПФ можно использовать для проведения спектрального анализа, чтобы обнаруживать неисправности подшипников IM в детерминированных условиях двигателя.Подобно предыдущему обсуждению анализа поломки стержня ротора, WT можно использовать для определения переходных характеристик сигнала для обнаружения неисправности подшипника IM. Например, Konar и Vhattopadhyay [22] использовали дискретный WT для обнаружения неисправностей подшипников IM. WPD также может использоваться для исследования информации о переходных неисправностях для обнаружения неисправностей подшипников IM [23]. Тем не менее, WPD генерирует массивную информацию, не связанную с неисправностями, которая может маскировать особенности неисправностей на карте и увеличивать трудности при обнаружении неисправностей.Frosini и Bassi [24] использовали характеристики сигналов тока статора и эффективности IM для обнаружения неисправностей подшипников. Чжоу и др. [25] использовали фильтр Винера для уменьшения шума, чтобы обнаружить дефект подшипника IM. Romero-Troncoso et al. [26] провели оперативное обнаружение неисправностей IM с использованием информационной энтропии и нечеткого вывода. Пинеда-Санчес и др. [27] использовали энергетического оператора Тигера-Кайзера для улучшения характеристик неисправности для обнаружения дефекта подшипника IM. Тем не менее, эти доступные методы проводят обнаружение неисправностей подшипников IM на основе ограниченной информации о неисправностях, а не всесторонне исследуют особенности неисправностей во временной области, частотной области и частотно-временной области.Поэтому их производительность может ухудшиться.
Как правило, возникновение неисправностей IM начинается с небольших дефектов и переходит в серьезную стадию по мере выполнения операции. Серьезные сбои IM вызовут неисправность оборудования и даже катастрофические сбои. Следовательно, обнаружение отказов IM на самой ранней стадии имеет большое значение для мониторинга состояния IM. Признаки неисправности IM из сигналов тока статора будут связаны с размером неисправности, типом двигателя, частотой питания, состоянием нагрузки и т. Д.На сегодняшний день выделение признаков неисправности из токовых сигналов IM, особенно связанных с дефектами подшипников, все еще остается сложной задачей из-за сложного пути передачи и шума окружающей среды.
Для решения вышеупомянутых трудностей в этой работе предлагается метод спектральной синхронизации (SS) для сбора связанной с неисправностями информации и генерации характерных признаков неисправностей IM, таких как неисправность стержня ротора и дефект внешнего кольца в подшипнике. SS будет исследовать характерные частотные составляющие, а также их особенности в соседних локальных диапазонах, чтобы всесторонне выделить особенности неисправностей и смягчить влияние выбросов с большой амплитудой.Конкретные подходы в предлагаемой методике SS включают следующее: (1) предлагается метод синхронизации для формирования спектра информации о сбоях (FIS) путем синхронизации нескольких локальных диапазонов, связанных с сбоями, чтобы подчеркнуть особенности сбоя и улучшить SNR; (2) предлагается метод центрального эксцесса для извлечения информации о неисправностях из результирующего FIS и создания индикатора неисправности для обнаружения зарождающейся неисправности IM. Эффективность предложенной методики SS подтверждается обнаружением неисправности обрыва стержня ротора IM и обнаружением неисправности подшипника IM.
Остальная часть этой главы организована следующим образом: разработанная методика SS описана в Разделе 2. Эффективность предлагаемого диагностического инструмента исследуется в Разделе 3 с использованием двух общих типов состояний неисправности IM; наконец, некоторые заключительные замечания этого исследования приведены в разделе 4.
Асинхронные двигатели — определение асинхронных двигателей в The Free Dictionary
Асинхронные машины подходят для работы через инверторные преобразователи, поскольку изоляция обмоток стандартных асинхронных двигателей выдерживает определенные перегрузки по напряжению, но при более высоких скоростях вращения, то есть более высоких частотах; они имеют более высокий уровень шума и дополнительные потери [2-4], которые влияют на выходной крутящий момент двигателя в зависимости от диапазона регулирования скорости вращения и коррекции коэффициента мощности [5-9].В промышленных конвейерных и погрузочно-разгрузочных машинах обычно используются дорогие синхронные приводы с постоянными магнитами («сервоприводы») или более дешевые асинхронные двигатели, оснащенные тормозами и муфтами. Индукционные двигатели, подключенные поперек линии при запуске, потребляют большие токи, примерно 600 процентов от номинального тока, и этот ток остается Высокоскоростной, надежный, простой в использовании, простой в интеграции и установке инвертор может использоваться в асинхронных двигателях и внутренних постоянных двигателях нового поколения.К сожалению, они также дороги, что объясняет более высокую закупочную цену PMSM по сравнению с асинхронными двигателями. Асинхронные машины, которые содержат асинхронные асинхронные двигатели и индукционные генераторы, являются важным оборудованием в энергосистемах. Темы включают модели управления для синхронных машин, с высоким коэффициентом усиления. наблюдатели в устойчивом управлении асинхронными двигателями с обратной связью, экспериментальная оценка методов проектирования нелинейного управления для асинхронных двигателей без датчиков, адаптивное управление с обратной связью по выходу синхронных двигателей с постоянными магнитами, нелинейное управление с обратной связью по состоянию синхронных двигателей с трехфазным ротором , а также применение управления асинхронными двигателями в электроприводах высокоскоростных поездов.Ян, Надежное адаптивное управление обратным ходом для оптимизации эффективности асинхронных двигателей с неопределенностями, Международный симпозиум IEEE по промышленной электронике (2008) 878-883. Двигатели разрабатываются в рамках исследовательского проекта по повышению эффективности асинхронных двигателей. Цель состоит в том, чтобы бросить вызов предполагаемым ограничениям, которые препятствуют принятию электромобилей на рынке: короткие расстояния и высокая закупочная цена. Индукционные двигатели (IM) используются во многих промышленных приложениях, поскольку они характеризуются высокой надежностью, низкой стоимостью единицы мощности и высокой мощностью на единицу мощности. единица объема и требует очень низкого обслуживания.В этих двигателях также доступны 3 и 5 л.с. при 1800 об / мин (максимальная скорость 2700 об / мин), в этих двигателях используются недорогие ферритовые магниты в конструкции с фокусировкой потока, что обеспечивает эффективность двигателей с постоянными магнитами на редкоземельных элементах по цене, конкурентоспособной с асинхронными двигателями. Управляемые частотно-регулируемыми приводами, эти агрегаты имеют номинальный КПД двигателя 93% и 92% для версий мощностью 3 и 5 л.с. соответственно. Цифровые двигатели обладают множеством преимуществ по сравнению со стандартными асинхронными двигателями и предназначены для работы с частыми двигателями. начинается и останавливается.
Испытания асинхронных двигателей
Испытание асинхронного двигателя (плановое испытание или испытание FAT) выполняется после завершения сборки производителем, чтобы доказать, что двигатель имеет те же технические характеристики, которые требуются в заказе на поставку.
Если применимо испытание под нагрузкой, эффективность определяется методом E1 IEEE 112. Если испытательная установка не способна провести испытание на повышение температуры при полной нагрузке, испытание проводится при пониженной мощности с экстраполяцией результатов до номинальных значений.Используются такие параметры испытания двигателя, как полная нагрузка, холостой ход, крутящий момент заблокированного ротора и т. Д., Как определено в IEC60034-1 и IEC60034-2.
Испытание на сопротивление холодной обмотки
Целью данного испытания при испытании асинхронного двигателя является измерение сопротивления обмоток статора, ротора и возбудителя, чтобы убедиться, что значения, рассчитанные при 20 ° C (окружающей среды), соответствуют техническим характеристикам. Эти значения используются для расчета повышения температуры. Сопротивления измеряются вольтамперометрическим методом при температуре окружающей среды.
Проверка выполняется генератором тока (более 10 А постоянного тока) и вольтметром. Критерии приемки должны основываться на утвержденной изготовителем процедуре, но обычно межфазное отклонение не должно превышать 2%, а максимальное отклонение от теоретического значения не должно превышать 5%.
Тест сопротивления датчика температуры
Этот тест проводится для проверки непрерывности и однородности каждого датчика температуры, определенного на 100 Ом для 0 ° C.Для измерения используется мультиметр или датчик прямого считывания температуры. Критерии приемки зависят от процедуры испытания, но обычно не должны превышать +/- 2 ° по Цельсию
Температурный тест подшипника
Температура подшипников часто измеряется во время работы асинхронного двигателя. Зарегистрированная температура не должна выходить за пределы допустимого диапазона, указанного в методике испытаний или в паспорте двигателя. Также должны быть проверены аномальные вибрации и шум.
Повышение температуры подшипников без нагрузки
Асинхронный двигатель должен работать при номинальном напряжении и частоте, и температура каждого подшипника измеряется периодически.Естественно, со временем температура подшипника повысится. Повышение температуры не должно быть больше указанного в процедуре испытания асинхронного двигателя или в паспорте двигателя. Процедура определяет время работы и интервалы считывания температуры.
Кривая холостого хода и характеристики потерь при текущих испытаниях асинхронного двигателя
Ротор должен поработать некоторое время, чтобы стабилизировать температуру подшипников и другие параметры. Затем напряжение повышается до 120% от номинального значения при номинальной скорости двигателя.Взяты две точки данных.
Затем напряжение снижается до 110% и берется еще 1 точка данных. Этот процесс продолжается до 60% номинального напряжения, и снимаются несколько точек данных. Напряжение между фазами, ток по фазе и потребляемая мощность должны измеряться в каждой точке данных. Измерение может быть выполнено анализатором мощности. Электрический расчет сделан для получения фактических потерь.
Критерии приемки должны основываться на утвержденной поставщиком методике текущих испытаний двигателя, но обычно расчетные потери должны быть менее 110% от теоретических потерь.
Испытание на превышение скорости при испытании асинхронного двигателя
Испытание на превышение скорости выполняется, чтобы убедиться, что скорость ротора может достигать 1,2-кратного значения номинальной скорости за 2 минуты. Для измерения скорости ротора используется спидометр, при этом не должно наблюдаться особого шума, чрезмерной вибрации и аномального повышения температуры.
Вибрация подшипника без нагрузки
Испытание подшипника на вибрацию выполняется, когда ротор работает без нагрузки, а амплитуда скоростной вибрации должна быть измерена в горизонтальном, вертикальном и осевом направлениях.Для измерения используется датчик скорости или акселерометр. Акселерометр измеряет виброускорение, а не скорость. Если используется, программа преобразует ускорение в скорость, применяя расчет.
Приемлемость испытания должна быть проверена на соответствие критериям приемки в процедуре стандартного испытания асинхронного двигателя, но обычно амплитуда не должна быть более 2,5 мм / с или 0,098 дюйма / с (среднеквадратичное значение).
Проверка тока и крутящего момента заторможенного ротора (SC / FLC и ST / FLT)
Целью проверки при текущих испытаниях двигателя является расчет коэффициента мощности, пускового тока и пускового момента.Тест проводится при заблокированном роторе. Пусковой ток может быть высоким, и испытание обычно проводится при более низком напряжении, а результат испытания экстраполируется на номинальное напряжение.
Для измерения используется анализатор мощности. После измерения рассчитывается отношение пускового тока к току полной нагрузки и пускового момента к моментам полной нагрузки (SC / FLC и ST / FLT). Расчетные значения должны быть проверены на соответствие критериям приемки, предусмотренным в утвержденной процедуре испытания асинхронного двигателя.
Проверка уровня шума
Двигатель должен работать при номинальном напряжении и частоте вращения ротора в условиях холостого хода, а уровень шума следует измерять в 8–12 точках в зависимости от размера двигателя и в передней части двигателя на расстоянии 1 метра от двигателя. Уровень шума обычно не должен превышать 80 дБА, но измеренное значение должно проверяться в соответствии с критериями приемки, указанными в таблице данных или процедуре испытания.
Испытание на нагрев при испытании асинхронного двигателя
В этом испытании машина соединена с соответствующим вращающимся оборудованием, таким как насос, вентилятор, компрессор и т. Д.затем к ротору прилагается нагрузка.
Все переменные, такие как ток, напряжение, мощность, температура статора, температура подшипников, измеряются при запуске, а также каждые 30 минут в соответствии с процедурой испытания. Для измерений используются анализатор мощности и температурный прибор.
После термостабилизации (температуры подшипников) двигатель останавливается, и измеряется сопротивление горячего статора, а рост температуры рассчитывается на основе следующих параметров:
- Температура обмотки в холодном состоянии
- Температура обмотки в конце испытания
- Температура охлаждающей жидкости в конце испытания
- Сопротивление статора в холодном состоянии между фазами
- Сопротивление статора между фазами в конце испытания
Уровень повышения температуры статора должен быть проверен на основе критериев приемки, указанных в протоколе / процедуре текущего испытания асинхронного двигателя.Этот тест является ключевым при тестировании асинхронного двигателя.
Испытание сопротивления изоляции
Испытание является одним из важных при текущих испытаниях асинхронного двигателя и проводится для измерения сопротивления изоляции обмотки якоря, полюсов возбуждения, датчиков, обогревателя и подшипников (если применимо).
На обмотку и корпус, к которым подключены магнитная цепь и другие обмотки, приложено постоянное напряжение. В случае, если емкость статора слишком велика для прибора, измерение может быть выполнено поэтапно при размыкании нейтрали.Для основных обмоток это измерение выполняется дважды, до и после испытания диэлектрической прочности. Измеренные значения сопротивления должны быть проверены в соответствии с критериями приемки, предусмотренными в процедуре испытания.
Вернуться на осмотр асинхронного двигателя
Вы нашли эту статью полезной? Нажмите на кнопки «Мне нравится» и «G + 1» ниже!
Индукционный двигатель
— Перевод на японский — примеры английский
Эти примеры могут содержать грубые слова на основании вашего поиска.
Эти примеры могут содержать разговорные слова, основанные на вашем поиске.
В этой статье описывается программа анализа динамических характеристик системы, которая моделирует запуск асинхронного двигателя при полном напряжении.
誘導 電動機 の 全 電 圧 始 動 を シ ミ ュ レ ー シ ョ ン す 系統 動 特性 解析 プ 述 べ た。
Предусмотрено устройство переключения тока, выход которого не изменяется резко, даже когда асинхронный двигатель управляется с помощью множества датчиков обнаружения тока.
複数 の 電流 検 出 セ ン 用 い て 誘導 電動機 を 制 御 す き で も 出力 が 急 峻 に し な い 電流 切 装置 る。
Токи, протекающие через соответствующие фазы асинхронного двигателя , обнаруживаются с низким разрешением и высоким разрешением.
誘導 電動機 の そ れ ぞ れ に 流 れ る 電流 を 低 分解 能 と 能 と で 検 出 る。
Способ торможения постоянным током для остановки асинхронного двигателя , в котором во время перехода от нормального состояния управления к состоянию торможения постоянным током ударный крутящий момент, вызванный резким изменением фазы выходного тока, подавляется ниже заранее определенного значения.
誘導 電動機 を 停止 す る た め 直流 制動 方法 に お い て 、 通常 状態 か ら 直流 制動 状態 に 移行 際 に 、 出力 電流 位相 の に
В гибридном подвижном составе двигатель (1) может быть запущен без специального устройства с помощью преобразователя мощности (4) и индукционного генератора (2), обычно используемых в качестве источника питания постоянного тока в качестве инвертора и асинхронного двигателя .
本 発 明 に 係 る ハ イ ブ リ ッ ド 鉄 道 車 両 で は, 通常 直流 電源 と し て 使用 す る 電力 変 換 器 4 と 誘導 発 電機 2 を イ ン バ ー タ 装置 と 誘導 電動機 と し て 使用 す る こ と に よ り 特別 な 装置 を 設 け る こ と な く エ ン ジ ン 1 の 始 動 を 可能と し た。
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ И ПОТОЛОЧНЫЙ ВЕНТИЛЯТОР С ОДНОЙ
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ СПОСОБ ОСТАНОВА И УСТРОЙСТВО УПРАВЛЕНИЯ
РОТОР СИНХРОННОГО ИНДУКЦИОННОГО ДВИГАТЕЛЯ И КОМПРЕССОР
ПРОЦЕСС ИЗГОТОВЛЕНИЯ РОТОРА ДЛЯ КЛЕТЕВОГО ТИПА ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ , СИСТЕМА ЭЛЕКТРОПРИВОДА И ЭЛЕКТРИЧЕСКИЙ АВТОМОБИЛЬ, СОДЕРЖАЩИЕ ОБА
誘導 電動機 、 電動 駆 動 シ ス テ ム 及 び そ れ ら を 備 え 電動 車 両
Пусковое устройство однофазного асинхронного двигателя , которое может минимизировать потребляемую мощность в установившемся режиме, тем самым экономя энергию.
【課題】 定 常 運 転 中 の 消費 電力 を 抑制 し 得 て 、 省 エ ギ ー 化 を 図 る こ と き る 単 相 誘導 電動機 の 起動 装置 を 提供 す る。
Высокоэффективный синхронный асинхронный двигатель , полученный за счет затруднения прохождения магнитного потока в направлении оси q без нарушения магнитного пути в направлении оси d, тем самым увеличивая заметную разность полюсов.
d 軸 方向 の 磁路 を 阻 害 す と く 、 q 軸 方向 く く し 、 突 大 大 る る り り り 、 900 900 900 900
Насос приводится в действие Torishima, изготовленным высокопроизводительным трехфазным асинхронным двигателем , заполненным водой (мокрый двигатель).
電動機 は 、 水浸 式 の 三相 誘導 電動機 (ウ ェ ッ ト モ ー タ) を 使用 し て ま す。
ПУСКОВОЕ УСТРОЙСТВО ОДНОФАЗНОГО ИНДУКЦИОННОГО ДВИГАТЕЛЯ
Джордж Вестингауз, который в то время разрабатывал систему питания переменного тока, получил лицензию на патенты Tesla в 1888 году и приобрел в США вариант патента на концепцию асинхронного двигателя Ferraris .
当時 、 交流 送 電 を 開 発 し て い ョ ウ ス ン グ ハ ウ ス は は 1888 年 に テ 特許 の 権 利 し 900 900
Высокоэффективный асинхронный двигатель , обеспечивающий высокий пусковой крутящий момент без ухудшения прочности горячей посадки, и высоконадежный закрытый компрессор, в котором подавляется плавающее количество охлаждающего машинного масла.
焼 嵌 の 嵌合 強度 を 悪 さ せ る な く 、 ま た 起動 ト が 高 く 、 高 効率 な 誘導 電動機 が 得 ら れ 、 ま 機油.を 目的 と す る。
Институт технических исследований железных дорог (RTRI) разработал метод значительного увеличения силы электрического торможения в зонах высоких скоростей путем установки недорогого резистора между инвертором и тяговым двигателем (т.е. Асинхронный двигатель ).
そ こ で 、 イ ン ー 主 電動機 (( 誘導 電動機 ) の 間 に 価 な 抵抗 を す に よ り 、 電
Когда скорость вращения асинхронного двигателя низкая, а целевое значение крутящего момента низкое, крутящий момент асинхронного двигателя регулируется в соответствии с током, обнаруженным с высоким разрешением.
そ し て 、 誘導 電動機 の 回 転 低回 転 速度 、 且 つ ト 目標 値 が 低 ト ル ク 目標 あ る と き に は 高 で 高 で 検 900 900
Блок установки времени устанавливает время между запуском асинхронного двигателя с двойной обмоткой и отпусканием тормоза, а также время между началом торможения тормоза и остановкой асинхронного двигателя с двойной обмоткой в соответствии с время между запуском двухобмоточного асинхронного двигателя и возникновением крутящего момента.
時間 設定 部 は 、 2 重 巻 線 誘導 電動機 を 始 動 さ せ て か ー キ の 制動 解除 が 行 ま で の 時間 及 び 及 び ー 900 900 2 重 巻 線 誘導 電動機 を 始 動 さ せ て か ら ト ル ク が す る ま で の 応 設定 る。
.